cap´itulo iv. aplicaciones del calculo´ …mtpalezp/libros/03_4.pdf · de cramer. problema 4.1...
TRANSCRIPT
CAPITULO IV.APLICACIONES DELCALCULODIFERENCIAL
SECCIONES
1. Teorema de la funcion implıcita.
2. Teorema de la funcion inversa.
3. Cambio de variables.
4. Maximos y mınimos de funciones.
5. Extremos condicionados. Multiplicadores de Lagrange.
177

1. TEOREMA DE LA FUNCION IMPLICITA.
Nos planteamos en esta seccion el siguiente problema:
¿Bajo que condiciones una ecuacion del tipo F (−→x ,−→z ) = 0, con −→x ∈ Rm,−→z ∈ Rn, tiene alguna solucion −→z = g(−→x )?
Si dicha solucion existe y es unica localmente, decimos que F define implıcitamentea −→z en funcion de −→x .
Un caso particular de este problema es el de la solucion de un sistema li-neal
n∑j=1
aijzj = xi, 1 ≤ i ≤ n,
el cual tiene solucion unica cuando la matriz de los coeficientes tiene de-terminante no nulo y, en este caso, la solucion viene dada por la regla deCramer.
Si denotamos por −→z = (z1, . . . , zn) y −→x = (x1, . . . , xn) y definimos lasfunciones
fi(−→x ,−→z ) =n∑
j=1
aijzj − xi, 1 ≤ i ≤ n,
la matriz (aij)1≤i,j≤n es precisamente la matriz jacobiana de la funcionF = (f1, . . . , fn) con respecto a las variables (z1, . . . , zn) y, de lo anterior,deducimos que detJF 6= 0 es una condicion suficiente para que el sistemadefina de forma implıcita a −→z como funcion de −→x . Esta condicion tambiensera esencial en el caso general.
Veamos otro ejemplo sencillo: la ecuacion x2+y2+z2 = 1 representa la esferacentrada en el origen y radio unidad. Al despejar z en la ecuacion, obtenemosdos posibles soluciones, z = +
√1− x2 − y2 y z = −
√1− x2 − y2, que
representan la semiesfera superior y la semiesfera inferior, respectivamente,y definen dos funciones diferenciables, pero unicamente si x2 + y2 < 1.Esto significa que, en un entorno del punto (x0, y0, z0) perteneciente a laesfera, si z0 6= 0, la ecuacion inicial define implıcitamente una unica funcionz = z(x, y) diferenciable pero, si z0 = 0, la ecuacion no tiene solucion unicade la forma z = z(x, y).
Enunciamos a continuacion el resultado general que proporciona las condi-ciones suficientes para la existencia de una funcion definida en forma im-plıcita.
Teorema de la funcion implıcita. Sean F = (f1, . . . , fn) : Rm+n → Rn
una funcion de clase C(1) en un abierto D ⊂ Rm+n y (−→x0,−→z0) ∈ D un punto
tal que
178

i) F (−→x0,−→z0) = 0, y
ii)∂(f1, . . . , fn)∂(z1, . . . , zn)
(−→x0,−→z0) 6= 0, donde
∂(f1, . . . , fn)∂(z1, . . . , zn)
=
∣∣∣∣∣∣∣∂f1/∂z1 . . . ∂f1/∂zn
...∂fn/∂z1 . . . ∂fn/∂zn
∣∣∣∣∣∣∣,entonces existe un entorno abierto U ⊂ Rm de −→x0, un entorno abierto V ⊂Rn de −→z0 y una unica funcion g : U → V tales que:
a) g ∈ C(1)(U),
b) g(−→x0) = −→z0 ,
c) F(−→x , g(−→x )
)= 0, ∀−→x ∈ U .
Veamos en los distintos casos como se calculan las derivadas de una funciondefinida en forma implıcita.
1.1. Caso de una variable independiente.
Si una ecuacion f(x, y) = 0, donde f es una funcion diferenciable de lasvariables x e y, determina a y como funcion de x, la derivada de esta funciondada en forma implıcita, siempre que f ′y(x, y) 6= 0, puede hallarse por laformula:
dy
dx= −f
′x(x, y)f ′y(x, y)
.
(Las derivadas de orden superior pueden hallarse por derivacion sucesiva dela formula anterior.)
Ejemplo 1. En la formula (x2 + y2)3 − 3(x2 + y2) + 1 = 0, tenemos:
f ′x(x, y) = 3(x2 + y2)2 · 2x− 3(2x) = 6x[(x2 + y2)2 − 1]f ′y(x, y) = 3(x2 + y2)2 · 2y − 3(2y) = 6y[(x2 + y2)2 − 1].
de donde dy/dx = −x/y.
Para hallar la segunda derivada, derivamos con respecto a x la primeraderivada que hemos encontrado, teniendo en cuenta al hacerlo que y esfuncion de x:
d2y
dx2=
d
dx
(−xy
)= −y − x(dy/dx)
y2= −y − x(−x/y)
y2= −y
2 + x2
y3.
1.2. Caso de varias variables independientes.
Analogamente, si la ecuacion F (x1, . . . , xn, z) = 0, donde F es una funciondiferenciable de las variables x1, . . . , xn y z, determina en forma implıcitaa z como funcion de las variables independientes x1, . . . , xn, en los puntos
179

donde F ′z(x1, . . . , xn, z) 6= 0, las derivadas parciales de esta funcion dada enforma implıcita pueden hallarse por las formulas:
∂z
∂x1= −
F ′x1(x1, . . . , xn, z)
F ′z(x1, . . . , xn, z), . . . ,
∂z
∂xn= −
F ′xn(x1, . . . , xn, z)
F ′z(x1, . . . , xn, z).
Ejemplo 2. La ecuacion x2−2y2+3z2−yz+y = 0 representa una superficieen el espacio R3. Si suponemos que dicha ecuacion define a z como funcionde x e y, z = f(x, y), sus derivadas parciales se calculan como sigue:
F ′x(x, y, z) = 2x, F ′y(x, y, z) = −4y − z + 1, F ′z(x, y, z) = 6z − y,
de modo que∂z
∂x= − 2x
6z − y,∂z
∂y= −1− 4y − z
6z − y,
en los puntos donde 6z − y 6= 0.
1.3. Sistemas de funciones implıcitas.
Si el sistema de dos ecuaciones{F (x, y, u, v) = 0G(x, y, u, v) = 0
}determina u y v como
funciones diferenciables de las variables x e y y el determinante de la matriz
jacobiana(
∂F∂u
∂F∂v
∂G∂u
∂G∂v
)es no nulo, entonces las derivadas parciales de u =
u(x, y), v = v(x, y) se obtienen por las formulas
∂u
∂x= −
∂(F,G)∂(x,v)
∂(F,G)∂(u,v)
,∂v
∂x= −
∂(F,G)∂(u,x)
∂(F,G)∂(u,v)
∂u
∂y= −
∂(F,G)∂(y,v)
∂(F,G)∂(u,v)
,∂v
∂y= −
∂(F,G)∂(u,y)
∂(F,G)∂(u,v)
.
(Utilizamos en estos casos la notacion∂(F,G)∂(u, v)
=∣∣∣∣∂F
∂u∂F∂v
∂G∂u
∂G∂v
∣∣∣∣, y de forma si-
milar con el resto de variables.)
Ejemplo 3. Sabiendo que las ecuaciones{u+ v = x+ yxu+ yv = 1
}determinan u y
v como funciones de x e y, si definimos las funciones
F (x, y, u, v) = u+ v − x− yG(x, y, u, v) = xu+ yv − 1,
180

las formulas anteriores dan los siguientes resultados:∂(F,G)∂(u, v)
=∣∣∣∣1 1x y
∣∣∣∣ = y − x,
∂(F,G)∂(u, x)
=∣∣∣∣1 −1x u
∣∣∣∣ = u+ x,∂(F,G)∂(x, v)
=∣∣∣∣−1 1u y
∣∣∣∣ = −y − u,∂(F,G)∂(y, v)
=∣∣∣∣−1 1v y
∣∣∣∣ = −y − v, ∂(F,G)∂(u, y)
=∣∣∣∣1 −1x v
∣∣∣∣ = v + x.
Por tanto,
∂u
∂x=y + u
y − x;∂v
∂x= −u+ x
y − x;
∂u
∂y=y + v
y − x;∂v
∂x= −v + x
y − x.
En la practica, en vez de utilizar las formulas anteriores, podemos resolverdirectamente el sistema formado por las derivadas parciales de las ecuacionesdadas, teniendo en cuenta que u y v son funciones de x e y.
Ası pues, al derivar respecto a x, obtenemos:
∂u
∂x+∂v
∂x= 1
u+ x∂u
∂x+ y
∂v
∂x= 0,
de donde∂u
∂x=
u+ y
−x+ y,
∂v
∂x=u+ x
x− y.
Analogamente se procederıa resolviendo el sistema formado por las derivadasparciales respecto a y.
1.4. Funciones dadas en forma parametrica.
Si la funcion diferenciable z de las variables x e y se expresa mediante susecuaciones parametricas
x = x(u, v), y = y(u, v), z = z(u, v)
y∂(x, y)∂(u, v)
=∣∣∣∣∂x∂u
∂x∂v
∂y∂u
∂y∂v
∣∣∣∣ 6= 0, la diferencial de esta funcion se deduce del sistema
de ecuaciones
dx =∂x
∂u· du+
∂x
∂v· dv,
dy =∂y
∂u· du+
∂y
∂v· dv,
dz =∂z
∂u· du+
∂z
∂v· dv.
181

Conociendo la diferencial dz = pdx + qdy, hallamos las derivadas parciales∂z
∂x= p y
∂z
∂y= q.
Ejemplo 4. Si la funcion z de los argumentos x e y viene dada por las
ecuaciones x = u + v, y = u2 + v2, z = u3 + v3, (u 6= v), hallar∂z
∂x,
∂z
∂y.
Primer metodo. Por diferenciacion, hallamos tres ecuaciones que relacionanentre sı las cinco variables:
dx = du+ dv,
dy = 2udu+ 2vdv,dz = 3u2du+ 3v2dv.
De las primeras dos ecuaciones despejamos du y dv:
du =2vdx− dy2(v − u)
, dv =dy − 2udx2(v − u)
.
Sustituyendo en la tercera ecuacion estas expresiones, resulta:
dz = 3u2 2vdx− dy2(v − u)
+ 3v2 dy − 2udx2(v − u)
= −3uv dx+32
(u+ v) dy,
de donde∂z
∂x= −3uv,
∂z
∂y=
32
(u+ v).
Segundo metodo. Calculamos las derivadas parciales respecto a x e y enlas tres ecuaciones que definen z, teniendo en cuenta que u = u(x, y), v =v(x, y). Tenemos ası:
(∗)
{1 = ∂u
∂x + ∂v∂x 0 = ∂u
∂y + ∂v∂y
0 = 2u ∂u∂x + 2v ∂v
∂x 1 = 2u ∂u∂y + 2v ∂v
∂y
(∗∗){ ∂z
∂x = 3u2 ∂u∂x + 3v2 ∂v
∂x∂z∂y = 3u2 ∂u
∂y + 3v2 ∂v∂y .
Al resolver los dos sistemas de (∗), obtenemos
∂u
∂x=
v
v − u,
∂v
∂x=
u
u− v,
∂u
∂y=
12(u− v)
,∂v
∂y=
12(v − u)
.
182

Sustituyendo estas expresiones en la formula (∗∗), resulta:
∂z
∂x= 3u2 v
v − u+ 3v2 u
u− v= −3uv
∂z
∂y= 3u2 1
2(u− v)+ 3v2 1
2(v − u)=
3(u+ v)2
.
Tercer metodo. Definimos la funcion h(u, v) = f(x(u, v), y(u, v)
)− z(u, v),
donde z = f(x, y) es la funcion determinada por las ecuaciones parametricas.Entonces h(u, v) = 0 en los puntos donde esta definida dicha funcion y:
∂h
∂u= 0 = D1f ·
∂x
∂u+D2f ·
∂y
∂u− ∂z
∂u,
∂h
∂v= 0 = D1f ·
∂x
∂v+D2f ·
∂y
∂v− ∂z
∂v.
Resulta ası un sistema de dos ecuaciones que se resuelve aplicando la reglade Cramer.
PROBLEMA 4.1
Sea h : R2 → R la funcion definida por
h(x, y) = x2 + y3 + xy + x3 + ay,
siendo a un parametro real.
(a) ¿Para que valores de a la ecuacion h(x, y) = 0 define y comofuncion implıcita de x de clase C(∞), en un entorno de (0, 0)?
(b) ¿Define la anterior ecuacion a x como funcion implıcita diferen-ciable de y en un entorno de (0, 0) para algun valor de a?
Solucion
(a) Averiguemos si se cumplen las hipotesis del teorema de la funcion im-plıcita.
i) h(0, 0) = 0, evidentemente.
ii) Como h es una funcion polinomica, existen
D1h(x, y) = 2x+ y + 3x2,
D2h(x, y) = 3y2 + x+ a
y son continuas en todo R2. En particular lo seran en (0, 0).
183

iii) D2h(0, 0) = a.
Por tanto, si a 6= 0, h(x, y) = 0 define a y como funcion implıcita declase C(∞) en un entorno de (0, 0).
(b) Veamos ahora que la ecuacion no define a x como funcion implıcitadiferenciable de y en un entorno de (0, 0). Es claro que se verifican i)y ii) pero no iii) porque D1h(0, 0) = 0 independientemente del valorde a.
PROBLEMA 4.2
Sea f ∈ C(1)(R2) una funcion homogenea de grado 2 y tal quef(0, 1) = 4. ¿Existe algun valor de k para el cual la ecuacionf(x, y)−k = 0 define a y como funcion implıcita de x en un entornode (0, 1)?
Solucion
Por hipotesis, f(tx, ty) = t2f(x, y), ∀t > 0. En particular,
f(0, t) = t2f(0, 1) = 4t2, ∀t > 0.
Debemos estudiar si la funcion G(x, y) = f(x, y)− k verifica las condicionesdel teorema de la funcion implıcita en el punto (0, 1).
i) En primer lugar, para que G(0, 1) = 0, debe ser k = 4.
ii) Debido a las hipotesis del problema, es claro que G ∈ C(1)(R2).
iii) Por definicion,∂G
∂y=∂f
∂y. Ademas,
∂f
∂y(0, 1) = lım
k→0
f(0, 1 + k)− f(0, 1)k
= lımk→0
4(1 + k)2 − 4k
= 8.
Deducimos entonces que∂G
∂y(0, 1) 6= 0.
184

En conclusion, si k = 4, la ecuacion dada define a y como funcion implıcitade x en un entorno del punto (0, 1).
PROBLEMA 4.3
Se considera la funcion u(x, y) = ey/x · g(x+ y
x− y
), siendo
g : R→ R una funcion de clase C(1).
(a) Demostrar que x∂u
∂x+ y
∂u
∂y= 0.
(b) Si g(3) = 0, g′(3) = 1, demostrar que u(x, y) = 0 define implıci-tamente una funcion y = ϕ(x) en un entorno del punto (1, 1/2).Calcular ϕ′(1).
Solucion
(a) Escribiremos por comodidad z(x, y) =x+ y
x− y, de modo que la funcion
dada se escribe como u(x, y) = ey/x · g(z(x, y)
).
Teniendo en cuenta que
∂z
∂x=
−2y(x− y)2
∂z
∂y=
2x(x− y)2
,
resulta:∂u
∂x=−yx2· ey/x · g
(z(x, y)
)+ ey/x · g′
(z(x, y)
)· ∂z∂x
= ey/x[g(z) · −y
x2+ g′(z) · −2y
(x− y)2];
∂u
∂y=
1x· ey/x · g
(z(x, y)
)+ ey/x · g′
(z(x, y)
)· ∂z∂y
= ey/x[g(z) · 1
x+ g′(z) · 2x
(x− y)2].
Un simple calculo algebraico da como resultado
x∂u
∂x+y
∂u
∂y= ey/x
[g(z)·−y
x+g′(z)· −2xy
(x− y)2]+ey/x
[g(z)·y
x+g′(z)· 2xy
(x− y)2],
cuyo valor es cero.
Observemos que la funcion es homogenea de grado cero, de modo quebastarıa aplicar el teorema de Euler para probar el resultado pedido.
185

(b) Veamos que se verifican las condiciones del teorema de la funcion im-plıcita:
u(1, 1/2) = e1/2g(3) = 0,∂u
∂y(1, 1/2) = e1/2
[g(3) + g′(3) · 2
(1− 1/2)2]
= 8e1/2 6= 0.
Ademas∂u
∂yes continua en un entorno de (1, 1/2), por serlo g y g′.
Ası pues, existe y = ϕ(x) en un entorno de (1, 1/2). Ademas
ϕ′(1) = −∂u∂x(1, 1/2)∂u∂y (1, 1/2)
=12.
PROBLEMA 4.4
Se define la funcion f(x, y) =g(x, y)x+ y
, donde g ∈ C(1)(R2) es una
funcion homogenea de grado 1.
(a) Probar que f es homogenea y determinar su grado.
(b) Sabiendo que el punto (1, 1) pertenece a la curva de nivel cerode g y que g′y(1, 1) 6= 0, probar que la ecuacion f(x, y) = 0 defineimplıcitamente una funcion y = ϕ(x) en un entorno del punto(1, 1) y calcular ϕ′(1).
Solucion
(a) Por hipotesis g(tx, ty) = t · g(x, y), de donde
f(tx, ty) =g(tx, ty)tx+ ty
= f(x, y),
lo que indica que f es homogenea de grado cero.
(b) Veamos si se verifican las hipotesis del teorema de la funcion implıcita:
i) En un entorno U del punto (1, 1) es x + y 6= 0, lo que, anadido ala hipotesis g ∈ C(1)(R2), permite concluir que f ∈ C(1)(U).
ii) Como g(1, 1) = 0, entonces f(1, 1) =g(1, 1)
2= 0.
186

iii) Como f ′y(x, y) =(x+ y) · g′y(x, y)− g(x, y)
(x+ y)2, entonces
f ′y(1, 1) =2g′y(1, 1)
46= 0.
Lo anterior asegura la existencia de una funcion y = ϕ(x) definida en
un entorno del punto (1, 1). Ademas, ϕ′(1) = −f′x(1, 1)f ′y(1, 1)
. Ahora bien,
como
f ′x(x, y) =(x+ y) · g′x(x, y)− g(x, y)
(x+ y)2, f ′y(x, y) =
(x+ y) · g′y(x, y)− g(x, y)(x+ y)2
,
resulta
ϕ′(1) = −g′x(1, 1)g′y(1, 1)
.
Al ser g una funcion homogenea de grado 1, por el teorema de Eulersabemos que
g′x(1, 1) + g′y(1, 1) = g(1, 1) = 0
(debido a que el punto (1, 1) esta en la curva de nivel cero de g).Sustituyendo este resultado, obtenemos en definitiva que ϕ′(1) = 1.
PROBLEMA 4.5
Sea F (x, y, z) = x2 + y2 − z2 − 1. ¿La ecuacion F (x, y, z) = 0 deter-mina a z como funcion implıcita de x e y en un entorno del punto(1, 1, 1)? ¿Y en un entorno de (1, 1,−1)? ¿Cual es la expresion ex-plıcita de dichas funciones?
Solucion
Es inmediata la comprobacion de las condiciones
F ∈ C(1)(R3), F (1, 1, 1) = 0,∂F
∂z(1, 1, 1) = −2 6= 0,
F (1, 1,−1) = 0,∂F
∂z(1, 1,−1) = 2 6= 0.
Lo anterior asegura la existencia de sendas funciones diferenciables z =z1(x, y) y z = z2(x, y) definidas en entornos de los puntos (1, 1, 1) y (1, 1,−1),respectivamente.
Al despejar z en la ecuacion F (x, y, z) = 0 obtenemos las expresiones ex-plıcitas:
z1(x, y) = +√x2 + y2 − 1 y z2(x, y) = −
√x2 + y2 − 1,
187

que representan las dos ramas del hiperboloide de una hoja definido por laecuacion original.
PROBLEMA 4.6
Calcular las derivadas parciales de la funcion z = f(x, y) definidaimplıcitamente por la ecuacion
y2 + xz + z2 − ez − c = 0.
Solucion
Construimos la funcion
F (x, y, z) = y2 + xz + z2 − ez − c.
En los puntos donde F ′z 6= 0, es decir x+2z− ez 6= 0, las derivadas parcialesson las siguientes:
∂z
∂x= −F
′x
F ′z= − z
x+ 2z − ez,∂z
∂y= −
F ′yF ′z
= − 2yx+ 2z − ez
.
PROBLEMA 4.7
Se considera la funcion u = u(x, y) definida implıcitamente por
la ecuacion u = F (x + u, yu). Calcular∂u
∂x,∂u
∂yen funcion de las
derivadas parciales de F .
Solucion
Teniendo en cuenta que u es funcion de x e y, si aplicamos la regla dela cadena, obtenemos (la notacion F ′1, F
′2 representa, como es usual, las
derivadas de F con respecto a sus dos variables v = x+ u, w = yu):
∂u
∂x= F ′1 ·
(1 +
∂u
∂x
)+ F ′2 · y ·
∂u
∂x=⇒ ∂u
∂x=
F ′11− F ′1 − yF ′2
∂u
∂y= F ′1 ·
∂u
∂y+ F ′2 ·
(y · ∂u
∂y+ u)
=⇒ ∂u
∂y=
F ′2 · F1− F ′1 − yF ′2
188
PROBLEMA 4.8
Siendo u = f((x− z)u, (y − t)u, (z − t)u
), demostrar que
∂u
∂x+∂u
∂y+∂u
∂z+∂u
∂t= 0.
Solucion
Hacemos x1 = (x − z)u, x2 = (y − t)u, x3 = (z − t)u, de modo que u =f(x1, x2, x3). Las derivadas parciales son entonces
∂u
∂x=
∂u
∂x1· ∂x1
∂x+
∂u
∂x2· ∂x2
∂x+
∂u
∂x3· ∂x3
∂x
= [u+ (x− z) · u′x] ·D1f + (y − t) · u′x ·D2f + (z − t) · u′x ·D3f
=⇒ ∂u
∂x=
u ·D1f
1− (x− z) ·D1f − (y − t) ·D2f − (z − t) ·D3f;
∂u
∂y=
∂u
∂x1· ∂x1
∂y+
∂u
∂x2· ∂x2
∂y+
∂u
∂x3· ∂x3
∂y
= (x− z) · u′y ·D1f + [u+ (y − t) · u′y] ·D2f + (z − t) · u′y ·D3f
=⇒ ∂u
∂y=
u ·D2f
1− (x− z) ·D1f − (y − t) ·D2f − (z − t) ·D3f;
∂u
∂z=
∂u
∂x1· ∂x1
∂z+
∂u
∂x2· ∂x2
∂z+
∂u
∂x3· ∂x3
∂z
= [−u+ (x− z) · u′z] ·D1f + (y − t) · u′z ·D2f + [u+ (z − t) · u′z] ·D3f
=⇒ ∂u
∂z=
−u ·D1f + u ·D3f
1− (x− z) ·D1f − (y − t) ·D2f − (z − t) ·D3f;
∂u
∂t=
∂u
∂x1· ∂x1
∂t+
∂u
∂x2· ∂x2
∂t+
∂u
∂x3· ∂x3
∂t
= (x− z) · u′t ·D1f + [−u+ (y − t) · u′t] ·D2f + [−u+ (z − t) · u′t] ·D3f
=⇒ ∂u
∂t=
−u ·D2f − u ·D3f
1− (x− z) ·D1f − (y − t) ·D2f − (z − t) ·D3f.
Sumando termino a termino, es evidente la identidad deseada.
PROBLEMA 4.9
Dada la funcion z = senx+1
sen y + 1sen x+...
, hallar dz.
189

Solucion
Teniendo en cuenta que
z = senx+1
sen y + 1/z= senx+
z
1 + z sen y
y sabiendo que dz = z′x dx+ z′y dy, calcularemos en la expresion anterior lasderivadas parciales:
z′x = cosx+z′x · (1 + z sen y)− z · z′x · sen y
(1 + z sen y)2= cosx+
z′x(1 + z sen y)2
=⇒ z′x =cosx · (1 + z sen y)2
(1 + z sen y)2 − 1;
z′y =z′y · (1 + z sen y)− z · (z′y · sen y + z · cos y)
(1 + z sen y)2=
z′y − z2 cos y(1 + z sen y)2
=⇒ z′y =−z2 cos y
(1 + z sen y)2 − 1.
En definitiva, dz =cosx · (1 + z sen y)2 · dx− z2 cos y · dy
(1 + z sen y)2 − 1.
PROBLEMA 4.10
Sea f : R2 → R una funcion diferenciable. Supongamos que laecuacion f(y/x, z/x) = 0 define a z implıcitamente como funcionde x e y. Probar que
x∂z
∂x+ y
∂z
∂y= z.
Solucion
A fin de aplicar la regla de la cadena, utilizaremos las variables auxiliaresu = y/x, v = z/x. De este modo, por la derivada de la funcion implıcita,tenemos:
∂z
∂x= −∂f/∂x
∂f/∂z= −f
′u · (−y/x2) + f ′v · (−z/x2)
f ′u · 0 + f ′v · (1/x)=yf ′u + zf ′v
xf ′v;
∂z
∂y= −∂f/∂y
∂f/∂z= −f
′u · (1/x) + f ′v · 0f ′u · 0 + f ′v · (1/x)
=−f ′uf ′v
.
190

Entonces
x∂z
∂x+ y
∂z
∂y=yf ′u + zf ′v
f ′v− yf ′u
f ′v= z.
PROBLEMA 4.11
La ecuacion F (x+ y + z, x2 + y2 + z2) = 0 define a z como funcionimplıcita diferenciable de x e y en un cierto abierto U ⊂ R2. Sillamamos z = f(x, y) a dicha funcion, calcular df(x, y) en funcionde D1F y D2F .
Solucion
Por hipotesis, podemos expresar la ecuacion dada como
F(x+ y + f(x, y), x2 + y2 + f2(x, y)
)= 0, ∀(x, y) ∈ U.
Derivando respecto a las variables x e y, y si llamamos por comodidad
P =(x+ y + f(x, y), x2 + y2 + f2(x, y)
),
resulta:
D1F (P ) · [1 +∂f
∂x(x, y)] +D2F (P ) · [2x+ 2f(x, y)
∂f
∂x(x, y)] = 0
D1F (P ) · [1 +∂f
∂y(x, y)] +D2F (P ) · [2y + 2f(x, y)
∂f
∂y(x, y)] = 0.
Por tanto,
∂f
∂x(x, y) = − D1F (P ) + 2xD2F (P )
D1F (P ) + 2f(x, y)D2F (P )∂f
∂y(x, y) = − D1F (P ) + 2yD2F (P )
D1F (P ) + 2f(x, y)D2F (P ).
PROBLEMA 4.12
Sea la funcion z = z(x, y) dada implıcitamente por la ecuacion
F(x+
z
y, y +
z
x
)= 0, donde F es una funcion diferenciable. Com-
probar que
x∂z
∂x+ y
∂z
∂y= z − xy.
191

Solucion
Llamamos u = x+z
y, v = y +
z
x. Aplicando las formulas de derivacion de
las funciones implıcitas:
∂z
∂x= −∂F/∂x
∂F/∂z
= −D1F (u, v) · (∂u/∂x) +D2F (u, v) · (∂v/∂x)D1F (u, v) · (∂u/∂z) +D2F (u, v) · (∂u/∂z)
= − D1F (u, v)− (z/x2) ·D2F (u, v)(1/y) ·D1F (u, v) + (1/x) ·D2F (u, v)
,
∂z
∂y= −∂F/∂y
∂F/∂z
= −D1F (u, v) · (∂u/∂y) +D2F (u, v) · (∂v/∂y)D1F (u, v) · (∂u/∂z) +D2F (u, v) · (∂v/∂z)
= − −(z/y2) ·D1F (u, v) +D2F (u, v)(1/y) ·D1F (u, v) + (1/x) ·D2F (u, v)
.
De lo anterior, se deduce que
x∂z
∂x+ y
∂z
∂y= −xD1F (u, v)− (z/x)D2F (u, v)− (z/y)D1F (u, v) + yD2F (u, v)
(1/y) ·D1F (u, v) + (1/x) ·D2F (u, v)
= z − [xD1F (u, v) + yD2F (u, v)](1/y) ·D1F (u, v) + (1/x) ·D2F (u, v)
= z − xy.
PROBLEMA 4.13
Determinar condiciones suficientes para que la ecuacion
f(xyz, x2 + y2
)= 0
defina a z como funcion implıcita de x e y en un entorno del punto(1, 1, 2). Para dicha funcion, calcular
y∂z
∂x− x ∂z
∂y
en el punto (1, 1, 2).
Solucion
192

(a) Definimos F : R3 → R por F (x, y, z) = f(xyz, x2 + y2
), es decir F es
la composicion de f con la funcion (u, v) : R3 → R2 definida por
(u, v)(x, y, z) =(xyz, x2 + y2
).
Para que F (x, y, z) = 0 defina a z como funcion implıcita de x e yen un entorno del punto (1, 1, 2), deben cumplirse las tres condicionessiguientes:
i) F (1, 1, 2) = 0, lo que por definicion equivale a f(1/2, 2) = 0.
ii) F ∈ C(1) en un entorno del punto (1, 1, 2).
Como la funcion (u, v) es de clase C(1) en un entorno del punto(1, 1, 2) (donde z 6= 0), dicha condicion equivale a que f ∈ C(1)
en un entorno del punto (1/2, 2).
iii)∂F
∂z(1, 1, 2) 6= 0.
Por la regla de la cadena,
∂F
∂z(1, 1, 2) = f ′u(1/2, 2) · u′z(1, 1, 2) + f ′v(1/2, 2) · v′z(1, 1, 2)
=−14f ′u(1/2, 2),
de modo que esta condicion equivale a f ′u(1/2, 2) 6= 0.
(b) Las condiciones anteriores aseguran la existencia de una funcion z =z(x, y) en un entorno del punto (1, 1, 2). Tenemos entonces
y∂z
∂x− x ∂z
∂y= y · −∂F/∂x
∂F/∂z− x · −∂F/∂y
∂F/∂z
=−y · ∂F/∂x+ x · ∂F/∂y
∂F/∂z
=−y[f ′u · u′x + f ′v · v′x] + x[f ′u · u′y + f ′v · v′y]
∂F/∂z
=(x2 − y2) · f ′uz · (∂F/∂z)
.
Sustituyendo en el punto (1, 1, 2), obtenemos el valor cero.
193

PROBLEMA 4.14
Se considera la ecuacion
x2 + y2 + z2 = ψ(ax+ by + cz), a, b, c ∈ R, (c 6= 0),
donde ψ : R → R es una funcion de clase C(1) tal que ψ(0) = 0,ψ′(0) = 1.
(a) Probar que dicha ecuacion define a z como funcion implıcitadiferenciable de x e y en un entorno de (0, 0, 0).
(b) Si llamamos z = f(x, y) a dicha funcion implıcita, probar que enel entorno del origen donde esta definida se verifica
(cy − bz)Dxf(x, y) + (az − cx)Dyf(x, y) = bx− ay.
(c) Si se supone que ψ tiene derivada segunda continua, calcularDxf(0, 0), Dyf(0, 0), Dxxf(0, 0), Dyyf(0, 0).
Solucion
(a) Sea G : R2 × R→ R la funcion definida por
G(x, y, z) = x2 + y2 + z2 − ψ(ax+ by + cz);
comprobemos que se verifican las hipotesis del teorema de la funcionimplıcita en un entorno de (0, 0, 0):
i) G(0, 0, 0) = 0 pues G(0, 0, 0) = −ψ(0) = 0.
ii) G ∈ C(1) porque es suma de la funcion polinomica (x, y, z) 7→x2 + y2 + z2, de clase C(∞), y la composicion de ψ, de clase C(1)
por hipotesis, con la funcion lineal (x, y, z) 7→ ax + by + cz, declase C(∞).
iii)∂G
∂z(0, 0, 0) 6= 0. En efecto,
DzG(x, y, z) = 2z−cψ′(ax+by+cz) =⇒ DzG(0, 0, 0) = −cψ′(0) = −c,
el cual es distinto de cero, por hipotesis.
Del teorema de la funcion implıcita se deduce entonces que existe unentorno abierto U de (0, 0), otro entorno abierto V de 0 y una funcion
194

f : U → V de clase C(1) tal que para cada (x, y) ∈ U , existe un unicoz = f(x, y) ∈ V que verifica G
(x, y, f(x, y)
)= 0, es decir
{(x, y, z) ∈ U × V : G(x, y, z) = 0} = {(x, y, z) ∈ U × V : z = f(x, y)}.
En particular f(0, 0) = 0.
(b) Por el apartado (a) sabemos que G(x, y, f(x, y)
)= 0, ∀(x, y) ∈ U , es
decirx2 + y2 + [f(x, y)]2 − ψ
(ax+ by + cf(x, y)
)= 0.
Derivando esta ecuacion con respecto a x e y, tenemos:
2x+ 2f(x, y)Dxf(x, y)− ψ′(ax+ by + cf(x, y)
)· [a+ cDxf(x, y)] = 0,
2y + 2f(x, y)Dyf(x, y)− ψ′(ax+ by + cf(x, y)
)· [b+ cDyf(x, y)] = 0.
(∗)
En el teorema de la funcion implıcita se pueden elegir U y V tales que
∀(x, y, z) ∈ U × V, DzG(x, y, z) = 2z − cψ′(ax+ by + cz) 6= 0;
en particular para los puntos en los que z = f(x, y) se tendra
2f(x, y)− cψ′(ax+ by + cf(x, y)
)6= 0,
y por tanto
Dxf(x, y) =aψ′(ax+ by + cf(x, y)
)− 2x
2f(x, y)− cψ′(ax+ by + cf(x, y)
)Dyf(x, y) =
bψ′(ax+ by + cf(x, y)
)− 2y
2f(x, y)− cψ′(ax+ by + cf(x, y)
) . (∗∗)
En los puntos en que z = f(x, y) se tiene entonces
(cy − bz)Dxf(x, y) + (az − cx)Dyf(x, y)
=c(ay − bx) · ψ′(ax+ by + cz) + 2z(bx− ay)
2z − cψ′(ax+ by + cz)= bx− ay.
(c) Si ψ tiene derivada segunda continua, entonces G es de clase C(2) y,por tanto, f es de clase C(2). Sustituyendo (x, y) por (0, 0) en lasexpresiones (∗∗) y teniendo en cuenta que f(0, 0) = 0, resulta
Dxf(0, 0) = −a/c, Dyf(0, 0) = −b/c. (∗ ∗ ∗)
195

Si derivamos en (∗) la primera ecuacion respecto de x y la segundarespecto de y, tenemos:
2 + 2[Dxf(x, y)]2 + 2f(x, y)Dxxf(x, y)− ψ′′
(ax+ by + cf(x, y)
)[a+ cDxf(x, y)]2
− cDxxf(x, y)ψ′(ax+ by + cf(x, y)
)= 0,
2 + 2[Dyf(x, y)]2 + 2f(x, y)Dyyf(x, y)− ψ′′
(ax+ by + cf(x, y)
)[b+ cDyf(x, y)]2
− cDyyf(x, y)ψ′(ax+ by + cf(x, y)
)= 0.
Sustituyendo en (0, 0) y teniendo en cuenta los resultados de (∗ ∗ ∗),resulta:
2 + 2a2
c2− cDxxf(0, 0) = 0
2 + 2b2
c2− cDyyf(0, 0) = 0
}=⇒
{Dxxf(0, 0) = 2 · a2+c2
c3
Dyyf(0, 0) = 2 · b2+c2
c3
.
PROBLEMA 4.15
Probar que el sistema
{x cos y + y cos z + z cosx = π
x2 + y2 + z2 − xy = π2
}define im-
plıcitamente una funcion f : U → R2, f(x) =(f1(x), f2(x)
), en un
entorno del punto (0, 0, π). Calcular f ′1(0), f ′2(0), f ′′1 (0), f ′′2 (0).
Solucion
Sea F : R3 → R2 definida por
F (x, y, z) = (F1, F2)(x, y, z) = (x cos y+y cos z+z cosx−π, x2+y2+z2−xy−π2).
Se prueba facilmente que:
i) F es de clase C(1) en (0, 0, π).
ii) F (0, 0, π) = 0.
iii)∣∣∣∣DyF1(0, 0, π) DzF1(0, 0, π)DyF2(0, 0, π) DzF2(0, 0, π)
∣∣∣∣ = ∣∣∣∣−1 10 2π
∣∣∣∣ 6= 0.
Luego F cumple las hipotesis del teorema de la funcion implıcita. Derivandorespecto a x en las dos ecuaciones, teniendo en cuenta que y = f1(x), z =f2(x), y sustituyendo el resultado en el punto (0, 0, π) se llega a
1− f ′1(0) + f ′2(0) = 02πf ′2(0) = 0
}=⇒ f ′1(0) = 1, f ′2(0) = 0.
196

Al calcular las derivadas de segundo orden respecto a x, resulta analoga-mente:
−f ′′1 (0) + f ′′2 (0)− π = 01 + πf ′′2 (0) = 0
}=⇒ f ′′1 (0) = −1 + π2
π, f ′′2 (0) = − 1
π.
PROBLEMA 4.16
Suponiendo que el sistema de ecuaciones
{2x = v2 − u2
y = uvpermite
definir las funciones u = u(x, y), v = v(x, y), calcular∂u
∂x,∂u
∂y,∂v
∂x,
∂v
∂y.
Solucion
Derivamos con respecto a x ambas ecuaciones y aplicamos la regla de Cra-mer. Tenemos ası:
2 = 2v · v′x − 2u · u′x0 = u · v′x + v · u′x
}=⇒
u′x =
˛˛2v 2u 0
˛˛˛
˛2v −2uu v
˛˛= −u
u2+v2
v′x =
˛˛2 −2u0 v
˛˛˛
˛2v −2uu v
˛˛= v
u2+v2 .
Si procedemos de forma analoga derivando respecto a y, resulta:
0 = 2v · v′y − 2u · u′y1 = u · v′y + v · u′y
}=⇒
u′y =
˛˛2v 0u 1
˛˛˛
˛2v −2uu v
˛˛= v
u2+v2
v′y =
˛˛0 −2u1 v
˛˛˛
˛2v −2uu v
˛˛= u
u2+v2 .
Observacion. Tambien podrıamos haber despejado u y v en funcion de xe y del sistema original y derivar las expresiones explıcitas obtenidas. En
197

la siguiente seccion se especifican las condiciones para la validez de esteprocedimiento.
PROBLEMA 4.17
Sea f : R5 → R2 la funcion definida por
f(x, y, z, u, v) = (u+ v + x2 − y2 + z2, u2 + v2 + u− 2xyz).
Probar que f(x, y, z, u, v) = 0 define una funcion implıcita dife-renciable (u, v) =
(h1(x, y, z), h2(x, y, z)
)en un entorno del punto
(0, 0, 0,−1/2, 1/2). Calcular dh(0, 0, 0).
Solucion
Sean f1(x, y, z, u, v) = u+v+x2−y2+z2 y f2(x, y, z, u, v) = u2+v2+u−2xyzlas componentes de f . Debido a que
i) f es de clase C(1) en (0, 0, 0,−1/2, 1/2),
ii) f(0, 0, 0,−1/2, 1/2) = 0,
iii)∣∣∣∣Duf1(0, 0, 0,−1/2, 1/2) Dvf1(0, 0, 0,−1/2, 1/2)Duf2(0, 0, 0,−1/2, 1/2) Dvf2(0, 0, 0,−1/2, 1/2)
∣∣∣∣ = ∣∣∣∣1 10 1
∣∣∣∣ 6= 0,
f cumple las condiciones del teorema de la funcion implıcita, de modo que,para todo (x, y, z) en un cierto entorno abierto de (0, 0, 0), se verifica:
h1(x, y, z) + h2(x, y, z) + x2 − y2 + z2 = 0,h2
1(x, y, z) + h22(x, y, z) + h1(x, y, z)− 2xyz = 0.
Derivando el sistema respecto a x y sustituyendo el resultado en el punto(0, 0, 0) (y teniendo en cuenta tambien que h1(0, 0, 0) = −1/2 y h2(0, 0, 0) =1/2), se obtiene:
D1h1(0, 0, 0) +D1h2(0, 0, 0) = 0,−D1h1(0, 0, 0) +D1h2(0, 0, 0) +D1h1(0, 0, 0) = 0,
de donde D1h1(0, 0, 0) = 0, D1h2(0, 0, 0) = 0.
Derivando el mismo sistema respecto a y y a z, se obtiene analogamen-te:
D2h1(0, 0, 0) = 0, D2h2(0, 0, 0) = 0, D3h1(0, 0, 0) = 0, D3h2(0, 0, 0) = 0.
198

Por tanto, dh(0, 0, 0) es la aplicacion lineal de R3 en R2 definida por lamatriz 0 0
0 00 0
.
PROBLEMA 4.18
Dado el sistema de ecuaciones
{x2 + y2 + u2 + v2 = 4
xyuv = 1,
hallar:
(a) Las expresiones de du, dv.
(b) El valor de x∂z
∂x− y ∂z
∂y, siendo z = (u+ v)2.
Solucion
(a) Definimos las funciones
F (x, y) = x2 + y2 + u(x, y)2 + v(x, y)2
G(x, y) = xyu(x, y)v(x, y).
De las ecuaciones dadas F (x, y) = 4, G(x, y) = 1, obtenemos:
0 =∂F
∂x= 2x+ 2u · u′x + 2v · v′x
0 =∂G
∂x= yuv + xyv · u′x + xyu · v′x.
Basta pues resolver este sistema de ecuaciones para obtener:
u′x =
∣∣∣∣ −2x 2v−yuv xyu
∣∣∣∣∣∣∣∣ 2u 2vxyv xyu
∣∣∣∣ =u(v2 − x2)x(u2 − v2)
v′x =
∣∣∣∣ 2u −2xxyv −yuv
∣∣∣∣∣∣∣∣ 2u 2vxyv xyu
∣∣∣∣ =v(x2 − u2)x(u2 − v2)
.
199

Procedemos de forma analoga con las derivadas parciales respecto a y.Del sistema
0 =∂F
∂y= 2y + 2u · u′y + 2v · v′y
0 =∂G
∂y= xuv + xyv · u′y + xyu · v′y,
se deduce que la solucion es
u′y =u(v2 − y2)y(u2 − v2)
v′y =v(y2 − u2)y(u2 − v2)
.
De lo anterior deducimos facilmente que
du = u′x · dx+ u′y · dy =u(v2 − x2)x(u2 − v2)
dx+u(v2 − y2)y(u2 − v2)
dy
dv = v′x · dx+ v′y · dy =v(x2 − u2)x(u2 − v2)
dx+v(y2 − u2)y(u2 − v2)
dy.
(b) Aplicando las reglas de derivacion de la funcion compuesta, tenemos:
z′x = 2(u+ v) · (u′x + v′x) =−2(uv + x2)
x
z′y = 2(u+ v) · (u′y + v′y) =−2(uv + y2)
y.
De este resultado se deduce que x z′x − y z′y = 2(y2 − x2).
PROBLEMA 4.19
Dada la curva C :{
2x2 + 3y2 − z2 = 25x2 + y2 = z2 , hallar un vector unitario
tangente a C en el punto P (√
7, 3, 4).
Solucion
Si representamos la curva por sus ecuaciones parametricas en la siguienteforma:
x = x(z), y = y(z),
200

un vector tangente a la misma en un punto P = (x0, y0, z0) es−−→v(P ) = (x′(z0), y′(z0), 1).
Para aplicar lo anterior a la curva dada, podemos definir las funciones
f(z) = 2[x(z)]2 + 3[y(z)]2 − z2 − 25,g(z) = [x(z)]2 + [y(z)]2 − z2.
Ahora bien, como, en los puntos de la curva, f(z) = g(z) = 0, entonces
0 = f ′(z) = 4x(z) · x′(z) + 6y(z) · y′(z)− 2z,0 = g′(z) = 2x(z) · x′(z) + 2y(z) · y′(z)− 2z.
Si resolvemos el sistema anterior mediante la regla de Cramer, obtene-mos:
x′(z) =
∣∣∣∣2z 6y(z)2z 2y(z)
∣∣∣∣∣∣∣∣4x(z) 6y(z)2x(z) 2y(z)
∣∣∣∣ =2zx(z)
,
y′(z) =
∣∣∣∣4x(z) 2z2x(z) 2z
∣∣∣∣∣∣∣∣4x(z) 6y(z)2x(z) 2y(z)
∣∣∣∣ =−zy(z)
.
De este modo, un vector tangente a la curva en el punto P = (√
7, 3, 4)es −−→
v(P ) = (8/√
7,−4/3, 1).
Basta dividir el vector por ‖−−→v(P )‖ =
√751/63 para obtener el vector unita-
rio buscado.
Las graficas ilustran la forma de la curva interseccion del hiperboloide deuna hoja con el cono, ası como el vector tangente en el punto dado.
201

2. TEOREMA DE LA FUNCION INVERSA.
Es conocido que, en una variable, si g es una funcion derivable en un intervalo(a, b) y g′(x) 6= 0, ∀x ∈ (a, b), entonces g es una funcion estrictamentemonotona y existe la inversa g−1 : g(a, b)→ R, la cual es derivable en g(a, b)y su derivada viene dada por
(g−1)′(y0) =1
g′(x0), con y0 = g(x0).
En el caso general, dado un sistema
y1 = f1(x1, . . . , xn)...
yn = fn(x1, . . . , xn),
se trata de encontrar las condiciones suficientes para que x1, . . . , xn se pue-dan expresar en funcion de y1, . . . , yn, sin tener que resolver explıcitamenteel sistema.
La existencia de solucion se deduce del teorema de la funcion implıcita apli-cado a las funciones
F1(x1, . . . , xn, y1, . . . , yn) = y1 − f1(x1, . . . , xn)...
Fn(x1, . . . , xn, y1, . . . , yn) = yn − fn(x1, . . . , xn).
Como ya enunciamos en la seccion anterior, la solucion existe si el deter-
minante de la matriz jacobiana es no nulo, es decir∂(F1, . . . , Fn)∂(x1, . . . , xn)
6= 0, lo
que equivale a∂(f1, . . . , fn)∂(x1, . . . , xn)
6= 0. Este hecho corresponde al teorema de la
funcion inversa.
Teorema. Sea f : Rn → Rn una funcion de clase C(1) en un abierto D ⊂ Rn.Si −→x0 ∈ D y det Jf(−→x0) 6= 0, entonces existen
i) un entorno U de −→x0,
ii) un entorno V de f(−→x0),
iii) una unica funcion g : V → U de clase C(1) en V ,
tales que g(f(−→x )
)= −→x , ∀−→x ∈ V .
Dicha funcion es, por definicion, la inversa local de f .
202

Para calcular la derivada de g, basta tener en cuenta que
Jf(−→x ) · Jg(−→y ) = In, con −→y = f(−→x ),
de modo quen∑
k=1
Dkgi(−→y ) ·Djfk(−→x ) =
{1 si i = j
0 si i 6= j
(sistema de n2 ecuaciones cuyas incognitas corresponden a los elementos dela matriz jacobiana de g).
PROBLEMA 4.20
Determinar en cada caso si la funcion g satisface las hipotesis delteorema de la funcion inversa. Encontrar g(D). En el caso de serg inyectiva, encontrar g−1 explıcitamente.
(a) g(−→t ) =
−→t +−→x0,
−→x0 ∈ Rn fijo, D = Rn.
(b) g(x, y) = (x2 − y2, xy), D = R2 \ {(0, 0)}.
(c) g(x, y) =(ln(xy), (x2 + y2)−1
), D = {(x, y) : 0 < y < x}.
Solucion
(a) Como el jacobiano Jg(t) = In y det In 6= 0, ∀−→t ∈ Rn, deducimosque g(Rn) = Rn y la funcion es biyectiva. Ademas es evidente queg−1(−→s ) = −→s −−→x0.
(b) En este caso, es evidente que g ∈ C(1)(R2); ademas, Jg(x, y) =(
2x −2yy x
)y det Jg(x, y) = 2x2+2y2 6= 0 pues (x, y) 6= (0, 0). Por tanto, g verificalas hipotesis del teorema de la funcion inversa. Como
g(R2 \ {(0, 0)}
)= R2 \ {(0, 0)},
existe la inversa g−1 localmente en un entorno de cualquier puntodistinto del origen. Sin embargo, la inversa no es unica globalmentedebido a que g no es inyectiva (observemos que g(−x,−y) = g(x, y)).
Para obtener una expresion explıcita de g−1, debemos resolver el sis-tema u = x2 − y2, v = xy. Tenemos ası:
u = x2 − y2
v = xy
}⇐⇒
u2 + 4v2 = (x2 + y2)2
u = x2 − y2
sign(x · y) = sign v
⇐⇒
x2 = u+√
u2+4v2
2
y2 = −u+√
u2+4v2
2sign(x · y) = sign v.
203

Distinguiremos dos casos:
- Si x ≥ 0, entonces sign v = sign y, con lo que la solucion del sistemaes
g−1(u, v) =
√u+√u2 + 4v2
2, (sign v) ·
√−u+
√u2 + 4v2
2
.
- Si x < 0, entonces sign v = − sign y; por tanto,
g−1(u, v) =
−√u+√u2 + 4v2
2,−(sign v) ·
√−u+
√u2 + 4v2
2
.
La grafica adjunta ilustra la imagen de la aplicacion g, segun los dife-rentes dominios:
(c) Si llamamos u = ln(xy), v = (x2 + y2)−1, entonces:
Jg(x, y) =
(∂u∂x
∂u∂y
∂v∂x
∂v∂y
)=
(1/x 1/y−2x
(x2+y2)2−2y
(x2+y2)2
),
de donde
det Jg(x, y) =2x2 − 2y2
xy(x2 + y2)26= 0 pues 0 < y < x.
Como ademas la funcion es de clase C(1) en D, se verifican las hipotesisdel teorema de la funcion inversa. Veamos que incluso la inversa esglobal, es decir la funcion es inyectiva en D.
204

En efecto, si g(x1, y1) = g(x2, y2), entonces
ln(x1y1) = ln(x2y2)(x2
1 + y21)−1 = (x2
2 + y22)−1
}=⇒
{x1y1 = x2y2
x21 + y2
1 = x22 + y2
2
=⇒{
(x1 − y1)2 = (x2 − y2)2
(x1 + y1)2 = (x2 + y2)2
=⇒{x1 − y1 = x2 − y2
x1 + y1 = x2 + y2
=⇒{x1 = x2
y1 = y2.
Obtendremos a continuacion una formula explıcita de g−1, para lo cualresolvemos el sistema u = ln(xy), v = (x2 + y2)−1:
eu = xyv−1 = x2 + y2
}=⇒
{v−1 + 2eu = (x+ y)2
v−1 − 2eu = (x− y)2
=⇒
x = 12
[√v−1 + 2eu +
√v−1 − 2eu
]y = 1
2
[√v−1 + 2eu −
√v−1 − 2eu
].
Por ultimo, g(D) = {(u, v) ∈ R2 : 0 < v < e−u/2}.
PROBLEMA 4.21
Sea g : R→ R definida por
g(x) =
{x/2 + x2 sen(1/x) si x 6= 00 si x = 0
.
Estudiar si es localmente invertible en un entorno de 0.
Solucion
205

Veamos si se cumplen las hipotesis del teorema de la funcion inversa parax = 0. Debe ser para ello g′ continua. Como
g′(0) = lımh→0
g(h)− g(0)h
= lımh→0
[12
+ h sen1h
]=
12,
tenemos
g′(x) =
{1/2 + 2x sen(1/x)− cos(1/x) si x 6= 01/2 si x = 0
que no es continua en x = 0 porque no existe lımx→0
cos(1/x).
De lo anterior se deduce que no se cumplen las hipotesis del teorema dela funcion inversa. Ahora bien, dichas condiciones son suficientes pero nonecesarias por lo que pueden existir funciones que, sin cumplirlas, admitaninversa en un entorno del punto. En nuestro caso debemos estudiar directa-mente la funcion. Para ello recordamos que, para que una funcion g : R→ Rsea invertible en cualquier intervalo, debe ser estrictamente monotona (cre-ciente o decreciente).
Debido a la forma de g′(x) en puntos xn =1nπ
, con n ∈ N, es
g′(xn) = 1/2− cos(nπ) =
{3/2 si n es impar−1/2 si n es par.
De aquı se deduce que, en todo entorno de cero, existen puntos donde laderivada de g es positiva y puntos donde es negativa, es decir, puntos dondela funcion es estrictamente creciente y puntos donde es estrictamente decre-ciente. Como g no es monotona en ningun intervalo abierto que contenga alcero, no es invertible en ninguno de estos intervalos.
PROBLEMA 4.22
Sea f : R2 → R2 la funcion definida por f(x, y) = (x+2y, x−y).
(a) Averiguar si satisface las hipotesis del teorema de la funcioninversa.
(b) Hallar Im f .
(c) Comprobar que f tiene inversa global, hallando f−1.
Solucion
206

(a) Para ver si cumple las hipotesis del teorema de la funcion inversa,debemos verificar en primer lugar que las derivadas parciales Djfi,i, j = 1, 2, son continuas, siendo f1(x, y) = x + 2y y f2(x, y) = x − ylas componentes de f ; esto es evidente porque
D1f1(x, y) = 1, D2f1(x, y) = 2,D1f2(x, y) = 1, D2f2(x, y) = −1.
Ademas la matriz derivada es Jf(x, y) =(
1 21 −1
)cuyo determinante
es no nulo ∀(x, y) ∈ R2.
De lo anterior se deduce pues que cada punto (x, y) ∈ R2 posee unentorno abierto en el cual existe f−1.
(b) Por definicion,
Im f = {(u, v) ∈ R2 : u = x+ 2y, v = x− y, x, y ∈ R}.
Debido a que el sistema{u = x+ 2yv = x− y
}, tiene solucion
{x = (u+ 2v)/3y = (u− v)/3
},
∀(u, v ∈ R2, deducimos que Im f = R2.
(c) Del resultado anterior se deduce tambien que u y v estan unıvocamentedeterminados; por tanto, f es inyectiva y ∃f−1 : R2 → R2 definida por
f−1(u, v) =(u+ 2v
3,u− v
3
).
PROBLEMA 4.23
Se considera la funcion f : R2 → R2 definida por
f(u, v) = (eu + ev, eu − ev).
Probar que f es localmente invertible en un entorno de cada punto(u, v) ∈ R2. Mostrar que tambien f es globalmente invertible calcu-lando su funcion inversa. Comprobar que las matrices derivadasde f y de f−1 en puntos correspondientes son inversas.
Solucion
Veamos que se cumplen las condiciones del teorema de la funcion inver-sa:
207

i) Escribimos f = (f1, f2), donde f1(u, v) = eu + ev y f2(u, v) = eu − ev;sera f ∈ C(1)(R2) si Dif1, Dif2 (i = 1, 2) son continuas, lo cual esevidente pues
D1f1(u, v) = eu; D2f1(u, v) = ev;D1f2(u, v) = eu; D2f2(u, v) = −ev.
ii) detJf(u, v) =∣∣∣∣eu ev
eu −ev∣∣∣∣ = −2euev 6= 0, ∀(u, v) ∈ R2.
El teorema citado asegura entonces que existe un abierto U ⊂ R2 que con-tiene al punto (u, v) y un abierto V ⊂ R2 que contiene al punto f(u, v) demodo que f |U : U → V posee una inversa f−1 : V → U que es diferenciableen V y tal que df−1(x, y) = [df(u, v)]−1, donde (u, v) = f−1(x, y).
En general el teorema de la funcion inversa no asegura la existencia de unafuncion inversa global f−1 : f(R2) → R2; en este caso sı va a existir comose prueba al calcular explıcitamente dicha inversa. Para ello calculamos enprimer lugar f(R2). Por definicion,
f(R2) = {(x, y) : ∃u, v ∈ R, (x, y) = (eu + ev, eu − ev)}.
Perox = eu + ev
y = eu − ev}
=⇒{x+ y = 2eu
x− y = 2ev
}=⇒
{u = ln x+y
2
v = ln x−y2
.
Observamos que para la existencia de u y v deben ser x+ y > 0 y x− y > 0lo que sugiere que f(R2) = {(x, y) : x+ y > 0, x− y > 0}. En efecto,
∀(u, v) ∈ R2, 2eu = (eu + ev) + (eu − ev) > 0,2ev = (eu + ev)− (eu − ev) > 0.
Observamos ademas que la funcion f : R2 → f(R2) es inyectiva pues, comohemos visto, el sistema x = eu + ev, y = eu − ev tiene solucion unica. Endefinitiva, existe una inversa global f−1 : f(R2)→ R2 definida por
f−1(x, y) =(lnx+ y
2, ln
x− y2
)208

cuya matriz derivada en el punto (x, y) es
df−1(x, y) =(
1/(x+ y) 1/(x+ y)1/(x− y) −1/(x− y)
)y la matriz derivada de f en el punto correspondiente es
df(u, v) =(eu ev
eu −ev)
=(
(x+ y)/2 (x− y)/2(x+ y)/2 −(x− y)/2
).
PROBLEMA 4.24
Probar que la funcion f : R2 → R2 definida por f(x, y) = (ex cos y, ex sen y)es localmente invertible en un entorno de cada punto, pero no loes globalmente. Si
A = {(x, y) : 0 < y < 2π},
probar que f |A es inyectiva y hallar f−1.
Solucion
Comprobemos que se cumplen las hipotesis del teorema de la funcion inver-sa:
i) f ∈ C(1)(R2) pues, si llamamos f1(x, y) = ex cos y y f2(x, y) = ex sen y alas componentes de f , las derivadas parciales
D1f1(x, y) = ex cos y, D2f1(x, y) = −ex sen y,D1f2(x, y) = ex sen y, D2f2(x, y) = ex cos y,
son todas continuas.
ii) detJf(x, y) =∣∣∣∣ex cos y −ex sen yex sen y ex cos y
∣∣∣∣ = e2x > 0, ∀(x, y) ∈ R2.
Por el teorema de la funcion inversa, f es invertible localmente; sin embar-go no lo es globalmente porque no es inyectiva (observemos que f(x, y) =f(x, y + 2π)).
209

Veamos ahora que, si restringimos la funcion al dominio A, sı sera inyectiva.Sean pues (x, y), (x′, y′) ∈ A. Entonces:
f(x, y) = f(x′, y′) =⇒{ex cos y = ex
′cos y′
ex sen y = ex′sen y′
}=⇒
{e2x cos2 y = e2x′
cos2 y′
e2x sen2 y = e2x′sen2 y′
}=⇒ e2x[cos2 y + sen2 y] = e2x′
[cos2 y′ + sen2 y′]=⇒ e2x = e2x′
=⇒ x = x′.
De aquı se deduce que cos y = cos y′ y sen y = sen y′, de donde y′ = y+2kπ,pero como 0 < y, y′ < 2π, resulta y = y′.
Para hallar f−1, despejamos x e y en el sistema u = ex cos y, v = ex sen y.Como v/u = tg y y u2 + v2 = e2x, resulta que
f−1(u, v) =( ln(u2 + v2)
2, arc tg
v
u
), (u, v) 6= (0, 0).
PROBLEMA 4.25
Sea g(r, ϑ) = (r cosϑ, r senϑ). Probar que g es localmente invertibleen cada punto distinto de (0, ϑ). Obtener una inversa en el dominioA = {(x, y) ∈ R2 : x > 0, y > 0}.
Solucion
Para que exista una inversa local, deben cumplirse las siguientes condicio-nes:
i) g ∈ C(1)(R2) lo cual es evidente pues, si denotamos por g1(r, ϑ) = r cosϑy g2(r, ϑ) = r senϑ, entonces
D1g1(r, ϑ) = cosϑ, D2g1(r, ϑ) = −r senϑ,D1g2(r, ϑ) = senϑ, D2g2(r, ϑ) = r cosϑ,
que son continuas en todo R2.
ii) detJg(r, ϑ) =∣∣∣∣cosϑ −r senϑsenϑ r cosϑ
∣∣∣∣ = r, que es distinto de cero en todo pun-
to distinto de (0, ϑ), ∀ϑ ∈ R.
210
El teorema de la funcion inversa asegura pues que g es localmente invertibleen dichos puntos. Es claro que g no es inyectiva (debido a la periodicidadde la funcion) y que
g(R2 \ {(0, ϑ) : ϑ ∈ R}
)= R2 \ {(0, 0)}.
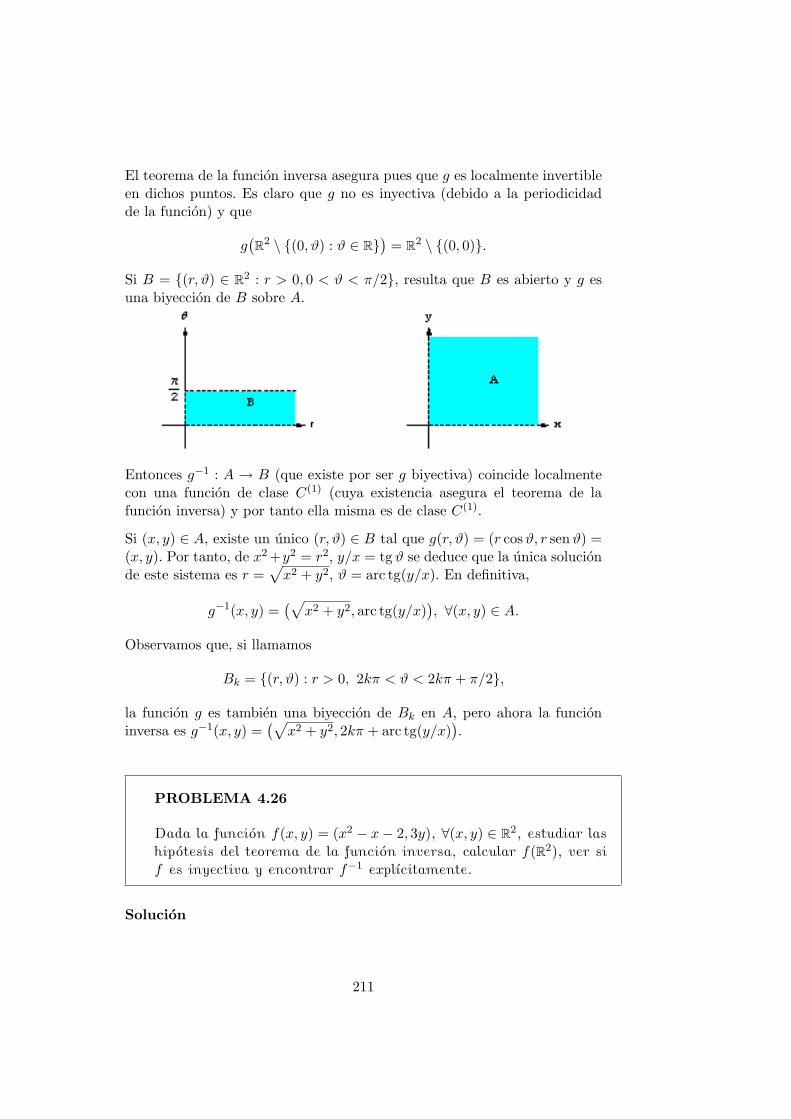
Si B = {(r, ϑ) ∈ R2 : r > 0, 0 < ϑ < π/2}, resulta que B es abierto y g esuna biyeccion de B sobre A.
Entonces g−1 : A → B (que existe por ser g biyectiva) coincide localmentecon una funcion de clase C(1) (cuya existencia asegura el teorema de lafuncion inversa) y por tanto ella misma es de clase C(1).
Si (x, y) ∈ A, existe un unico (r, ϑ) ∈ B tal que g(r, ϑ) = (r cosϑ, r senϑ) =(x, y). Por tanto, de x2 +y2 = r2, y/x = tg ϑ se deduce que la unica solucionde este sistema es r =
√x2 + y2, ϑ = arc tg(y/x). En definitiva,
g−1(x, y) =(√
x2 + y2, arc tg(y/x)), ∀(x, y) ∈ A.
Observamos que, si llamamos
Bk = {(r, ϑ) : r > 0, 2kπ < ϑ < 2kπ + π/2},
la funcion g es tambien una biyeccion de Bk en A, pero ahora la funcioninversa es g−1(x, y) =
(√x2 + y2, 2kπ + arc tg(y/x)
).
PROBLEMA 4.26
Dada la funcion f(x, y) = (x2 − x− 2, 3y), ∀(x, y) ∈ R2, estudiar lashipotesis del teorema de la funcion inversa, calcular f(R2), ver sif es inyectiva y encontrar f−1 explıcitamente.
Solucion
211

- Es claro que f verifica las hipotesis del teorema de la funcion inversa por-que, si llamamos f1(x, y) = x2−x−2 y f2(x, y) = 3y a las componentesde f , entonces:
D1f1(x, y) = 2x− 1, D2f1(x, y) = 0,D1f2(x, y) = 0, D2f2(x, y) = 3,
que son evidentemente continuas. Ademas,
Jg(x, y) =(
2x− 1 00 3
)y detJf(x, y) = 3(2x− 1),
el cual es distinto de cero cuando x 6= 1/2, lo que indica que existef−1 en un entorno de cada punto (x, y) ∈ R2 tal que x 6= 1/2.
- Como el sistema de ecuaciones u = x2−x−2, v = 3y tiene solucion cuandoel discriminante de la ecuacion de segundo grado x2 − x− (2 + u) = 0es no negativo, es decir cuando 9 + 4u ≥ 0, la imagen de la funcionsera
Im f = {(u, v) ∈ R2 : u = x2 − x− 2, v = 3y, x, y ∈ R}
={
(u, v) ∈ R2 : u ≥ −94
}.
- Al resolver el sistema anterior, obtenemos que x =1±√
9 + 4u2
, y = v/3,
de lo que se deduce en particular que, excepto cuando u = −9/4, elvalor de x no esta unıvocamente determinado, es decir existen
x1 =1 +√
9 + 4u2
, x2 =1−√
9 + 4u2
,
de modo que x1 6= x2 y f(x1, y) = f(x2, y); ası pues f no es inyectiva.
Ahora bien, si llamamos D1 = {(x, y) ∈ R2 : 2x > 1}, entoncesf(D1) = {(u, v) ∈ R2 : 4u+ 9 > 0}, f |D1 es inyectiva y
f−1(u, v) =(
1 +√
9 + 4u2
,v
3
), u > −9
4
212

y, si llamamos D2 = {(x, y) ∈ R2 : 2x < 1}, entonces
f(D2) = {(u, v) ∈ R2 : 4u+ 9 > 0},
f |D2 es inyectiva y
f−1(u, v) =(
1−√
9 + 4u2
,v
3
), u > −9
4
(resultados que se obtienen al resolver el sistema u = x2 − x − 2,v = 3y).
PROBLEMA 4.27
Hallar∂z
∂xy∂z
∂yen el punto u = 1, v = 1, si x = u+ln v, y = v− lnu,
z = 2u+ v.
Solucion
Por la regla de la cadena,
∂z
∂x= 2
∂u
∂x+∂v
∂x,
∂z
∂y= 2
∂u
∂y+∂v
∂y,
donde (u, v) = F (x, y) es la funcion inversa de (x, y) = (u + ln v, v − lnu).Para comprobar que existe dicha funcion inversa en un entorno del punto(u, v) = (1, 1), calculamos el jacobiano
∂(x, y)∂(u, v)
=∣∣∣∣ 1 1/v−1/u 1
∣∣∣∣ =⇒ ∂(x, y)∂(u, v)
(1, 1) =∣∣∣∣ 1 1−1 1
∣∣∣∣ = 2 6= 0.
213

Como la funcion dada es de clase C(1), existe una inversa local (u, v) =F (x, y).
Para calcular las derivadas parciales de esta funcion inversa, derivamos lafuncion dada con respecto a x y resolvemos el sistema resultante:
1 = ∂u∂x + 1
v ·∂v∂x
0 = − 1u ·
∂u∂x + ∂v
∂x
}=⇒
∂u∂x =
˛˛1 1/v0 1
˛˛˛
˛ 1 1/v−1/u 1
˛˛= 1
1+ 1uv
=⇒ ∂u∂x
∣∣∣u=1,v=1
= 12
∂v∂x =
˛˛ 1 1−1/u 0
˛˛˛
˛ 1 1/v−1/u 1
˛˛= 1/u
1+ 1uv
=⇒ ∂v∂x
∣∣∣u=1,v=1
= 12
Analogamente se procede con las derivadas respecto a y:
0 = ∂u∂y + 1
v ·∂v∂y
1 = − 1u ·
∂u∂y + ∂v
∂y
}=⇒
∂u∂y =
˛˛0 1/v1 1
˛˛˛
˛ 1 1/v−1/u 1
˛˛= −1/v
1+ 1uv
=⇒ ∂u∂y
∣∣∣u=1,v=1
= −12
∂v∂y =
˛˛ 1 0−1/u 1
˛˛˛
˛ 1 1/v−1/u 1
˛˛= 1
1+ 1uv
=⇒ ∂v∂y
∣∣∣u=1,v=1
= 12
Sustituyendo estos resultados en las derivadas de z, obtenemos en definiti-va
∂z
∂x
∣∣∣u=1,v=1
=32,∂z
∂y
∣∣∣u=1,v=1
=−12.
PROBLEMA 4.28
Sea f : R3 → R3 la funcion definida por
f(x, y, z) =(ex, sen(x+ y), ez
).
(a) Probar que f es localmente invertible en (0, 0, 0).
(b) Probar que existen puntos en R3 donde no se cumplen las hipotesisdel teorema de la funcion inversa.
Solucion
214

(a) Debemos probar que f ∈ C(1) y que det Jf(0, 0, 0) 6= 0. Para ellocalculamos las derivadas parciales de primer orden. Tenemos ası:
f ′x(x, y, z) =(ex, cos(x+ y), 0
),
f ′y(x, y, z) =(0, cos(x+ y), 0
),
f ′z(x, y, z) = (0, 0, ez),
cuyas componentes son evidentemente continuas en todo punto de R3.
Por otra parte,
det Jf(0, 0, 0) =
∣∣∣∣∣∣1 0 01 1 00 0 1
∣∣∣∣∣∣ = 1 6= 0.
Queda comprobado ası que se cumplen las hipotesis del teorema de lafuncion inversa en el origen.
(b) Como hemos visto antes, en cualquier punto (x0, y0, z0) ∈ R3, f ∈ C(1);sin embargo no siempre el jacobiano es distinto de cero, pues
det Jf(x0, y0, z0) =
∣∣∣∣∣∣ex0 0 0
cos(x0 + y0) cos(x0 + y0) 00 0 ez0
∣∣∣∣∣∣ = ex0+z0 cos(x0+y0),
y
det Jf(x0, y0, z0) = 0⇐⇒ x0 + y0 =(2n− 1)π
2, n ∈ Z.
Por tanto, en estos puntos no se cumplen las hipotesis del teorema yno podemos asegurar la existencia de la funcion inversa en un entornode ellos.
PROBLEMA 4.29
Sea g : R3 → R3 definida por
g(x, y, z) = (e2y + e2z, e2x − e2z, x− y).
(a) Probar que g es diferenciable en todo R3 y posee funcion inversadiferenciable en un entorno de cada punto.
(b) Probar que g es globalmente invertible.
Solucion
215

(a) Una condicion suficiente para que g sea diferenciable en R3 es que gsea de clase C(1) en todo R3, lo cual, por definicion, equivale a lacontinuidad de D1gi, D2gi, D3gi, ∀i = 1, 2, 3, siendo g1(x, y, z) = e2y +e2z, g2(x, y, z) = e2x − e2z y g3(x, y, z) = x− y.
Ahora bien, las derivadas parciales de gi (i = 1, 2, 3) son
D1g1(x, y, z) = 0D1g2(x, y, z) = 2e2x
D1g3(x, y, z) = 1
D2g1(x, y, z) = 2e2y
D2g2(x, y, z) = 0D2g3(x, y, z) = −1
D3g1(x, y, z) = 2e2z
D3g2(x, y, z) = −2e2z
D3g3(x, y, z) = 0,
las cuales son evidentemente continuas en cualquier punto de R3.
Por otra parte, para cualquier punto (x, y, z) ∈ R3 es detJg(x, y, z) 6= 0pues
det Jg(x, y, z) =
∣∣∣∣∣∣0 2e2y 2e2z
2e2x 0 −2e2z
1 −1 0
∣∣∣∣∣∣ = −4(e2(x+z) + e2(y+z)
)6= 0
ya que la funcion exponencial no se anula en ningun punto.
Como g cumple las hipotesis del teorema de la funcion inversa, poseeinversa en un entorno de cada punto de R3.
(b) Para que g sea invertible globalmente, debe ser inyectiva. Veamosque, en efecto, si g(x1, y1, z1) = g(x2, y2, z2), entonces (x1, y1, z1) =(x2, y2, z2).
De las ecuaciones
x1 − y1 = x2 − y2
e2y1 + e2z1 = e2y2 + e2z2
e2x1 − e2z1 = e2x2 − e2z2 ,
al sumar las dos ultimas tenemos que e2y1 + e2x1 = e2y2 + e2x2 , dedonde
e2y1(1 + e2x1−2y1) = e2y2(1 + e2x2−2y2).
Como x1 − y1 = x2 − y2, la ultima ecuacion queda ahora como e2y1 =e2y2 , de donde y1 = y2, lo que, al sustituir en las otras ecuaciones, datambien que x1 = x2 y z1 = z2, como querıamos comprobar.
216

PROBLEMA 4.30
(a) Probar que el sistema
{xz3 + y2u3 = 12xy3 + u2z = 0
}define a las variables x,
y como funciones implıcitas diferenciables de z, u en un entornodel punto P (x0, y0, z0, u0) = (0, 1, 0, 1).
(b) Sean x = h(z, u), y = g(z, u) las funciones implıcitas definidas enel apartado (a). Demostrar que la funcion
F (z, u) =(h(z, u), g(z, u)
)admite funcion inversa diferenciable en
un entorno del punto (0, 1).
Solucion
(a) Sea G : R2 × R2 → R2 la funcion definida por
G(x, y, z, u) = (xz3 + y2u3 − 1, 2xy3 + u2z)
y comprobemos que verifica las hipotesis del teorema de la funcionimplıcita.
i) G(0, 1, 0, 1) = (0, 0) lo que se obtiene por simple sustitucion.
ii) G ∈ C(1). En efecto, las dos componentes de G,
G1(x, y, z, u) = xz3 + y2u3 − 1 y G2(x, y, z, u) = 2xy3 + u2z
son polinomios y admiten derivadas parciales continuas de todoslos ordenes en cualquier punto de R4.
iii)∂(G1, G2)∂(x, y)
(P ) =∣∣∣∣DxG
1(P ) DyG1(P )
DxG2(P ) DyG
2(P )
∣∣∣∣ = ∣∣∣∣0 22 0
∣∣∣∣ = −4 6= 0.
Por tanto, existe un entorno abierto U de (0, 1) y otro entorno abier-to V de (0, 1) ası como una funcion F : U → V de clase C(1) talque, si F (z, u) =
(h(z, u), g(z, u)
), se tiene G
(h(z, u), g(z, u), z, u
)=
(0, 0), ∀(z, u) ∈ U . En otras palabras,
{(x, y, z, u) ∈ V × U : G(x, y, z, u) = (0, 0)}= {(x, y, z, u) ∈ V × U : x = h(z, u), y = g(z, u)}.
En particular, h(0, 1) = 0, g(0, 1) = 1. Observemos que, por ser G declase C(∞), la funcion implıcita F es tambien de clase C(∞).
(b) Sea F (z, u) =(h(z, u), g(z, u)
). Hemos de probar que F verifica las
hipotesis del teorema de la funcion inversa en (0, 1).
217

i) F es de clase C(1), tal como hemos concluido por el teorema de lafuncion implıcita.
ii) Ademas, debe ser∣∣∣∣h′z(0, 1) h′u(0, 1)g′z(0, 1) g′u(0, 1)
∣∣∣∣ 6= 0. Para comprobar esto,
utilizamos la identidad G(h(z, u), g(z, u), z, u
)= 0, ∀(z, u) ∈ U ,
es decir
h(z, u) · z3 + [g(z, u)]2 · u3 − 1 = 0,
2h(z, u) · [g(z, u)]3 + u2z = 0. (∗)
Derivando este sistema respecto a z, tenemos:
z3 · h′z(z, u) + 3z2 · h(z, u) + 2u3 · g(z, u) · g′z(z, u) = 0,2[g(z, u)]3 · h′z(z, u) + 6h(z, u) · [g(z, u)]2 · g′z(z, u) + u2 = 0.
Sustituyendo en el punto (z0, u0) = (0, 1) y teniendo en cuentaque h(0, 1) = 0, g(0, 1) = 1, resulta que
2g′z(0, 1) = 0, 2h′z(0, 1)+1 = 0 =⇒ g′z(0, 1) = 0, h′z(0, 1) = −1/2.
Derivando ahora (∗) respecto a u:
z3 · h′u(z, u) + 2u3 · g(z, u) · g′u(z, u) + 3u2 · [g(z, u)]2 = 0,2h′u(z, u) · [g(z, u)]3 + 6h(z, u) · [g(z, u)]2 · g′u(z, u) + 2uz = 0.
Nuevamente al sustituir en (z0, u0) = (0, 1), obtenemos:
2g′u(0, 1)+3 = 0, 2h′u(0, 1) = 0 =⇒ g′u(0, 1) = −3/2, h′u(0, 1) = 0.
Por tanto,∣∣∣∣h′z(0, 1) h′u(0, 1)g′z(0, 1) g′u(0, 1)
∣∣∣∣ = ∣∣∣∣−1/2 00 −3/2
∣∣∣∣ = 346= 0.
Como se cumplen las hipotesis del teorema de la funcion inversa, existeun conjunto abierto V que contiene a (0, 1) y un conjunto abierto Wque contiene a la imagen F (0, 1) = (0, 1) tal que F : V →W tiene unainversa continua F−1 : W → V que es diferenciable y satisface
d(F−1)(x, y) = [dF (F−1(x, y))]−1, ∀(x, y) ∈W.
218

PROBLEMA 4.31
Si u, v son funciones de las variables x, y definidas por las ecua-ciones
eu cos v − x = 0eu sen v − y = 0,
probar que el angulo formado por−→∇u y
−→∇v es constante.
Solucion
Para calcular−→∇u y
−→∇v, debemos determinar la funcion inversa de
x = eu cos vy = eu sen v,
la cual existe localmente porque x(u, v) e y(u, v) son funciones infinitamentederivables y
∂(x, y)∂(u, v)
=∣∣∣∣eu cos v −eu sen veu sen v eu cos v
∣∣∣∣ = e2u 6= 0.
Si derivamos las expresiones que definen a u y v con respecto a x, obtene-mos:
eu · cos v · u′x − eu · sen v · v′x = 1eu · sen v · u′x + eu · cos v · v′x = 0.
Al resolver este sistema, llegamos a la solucion u′x = e−u cos v, v′x = −e−u sen v.
Procedemos analogamente con las derivadas respecto a y. Obtenemos elsistema
eu · cos v · u′y − eu · sen v · v′y = 0eu · sen v · u′y + eu · cos v · v′y = 1,
y la correspondiente solucion u′y = e−u sen v, v′y = e−u cos v.
En definitiva,−→∇u = (e−u cos v, e−u sen v) y
−→∇v = (−e−u sen v, e−u cos v).
Como−→∇u ·
−→∇v = 0, deducimos que ambos vectores son perpendiculares en
todos los puntos.
219

3. CAMBIO DE VARIABLES
Como aplicacion al calculo de derivadas de funciones compuestas vamos aestudiar la forma en que se transforman las ecuaciones diferenciales cuandose realiza un cambio de variable (supondremos en todos los casos la igualdadde las derivadas parciales de segundo orden cruzadas). Destaquemos que laeleccion adecuada de un cambio de variable permite simplificar una ecuaciondiferencial y obtener muy facilmente sus soluciones (ver por ejemplo losproblemas 4.31 y 4.44). Ademas introducimos el estudio de las ecuacionesen derivadas parciales, de gran interes en las aplicaciones.
PRIMER CASO: En la ecuacion
G
(x, y,
dy
dx, . . . ,
dny
dxn
)= 0
cambia una sola variable.
1.1. Cambia la variable independiente mediante la ecuacion x =x(t).
ESQUEMA DE DEPENDENCIAS
y → x→ t
Comody
dt=dy
dx· dxdt
, entoncesdy
dx=y′tx′t
.
Si derivamos nuevamente respecto a t, resulta:
d
dt
[dy
dx
]=
d
dx
[dy
dx
]· dxdt
=d2y
dx2· dxdt
=y′′t · x′t − x′′t · y′t
(x′t)2,
de donded2y
dx2=
d
dt
(dydt
)· dtdx
=y′′t · x′t − x′′t · y′t
(x′t)3.
Las derivadas sucesivas se obtienen de manera analoga.
1.2. Cambia la variable independiente mediante la ecuacion t =t(x).
ESQUEMA DE DEPENDENCIAS
x← t← y → x
220

Por la regla de la cadena se obtiene directamente quedy
dx=dy
dt· dtdx
= y′t · t′xy
d2y
dx2=
d
dx
[dy
dt· dtdx
]=
d
dx(y′t) · t′x + y′t · t′′x = y′′t · (t′x)2 + y′t · t′′x.
1.3. Cambia solo la funcion mediante la ecuacion y = y(z).
ESQUEMA DE DEPENDENCIAS
x← y → z → x
y′x =dy
dx=dy
dz· dzdx
= y′z · z′x,
y′′x =d
dx
(dy
dx
)=
d
dx(y′z · z′x) = y′z · z′′x +
d
dx(y′z) · z′x
= y′z · z′′x +d
dz(y′z) · z′x · z′x = y′z · z′′x + y′′z · (z′x)2.
SEGUNDO CASO: En la ecuacion
G
(x, y,
dy
dx, . . . ,
dny
dxn
)= 0
cambian la funcion y variable antiguas por una funcion y variable nuevasmediante las relaciones x = x(u, v), y = y(u, v). El esquema de dependenciases el siguiente:
Las relaciones entre las derivadas de primer orden se obtienen de la siguienteforma:
Si y = f(x) y v = g(u), entonces y(u, v) = f(x(u, v)
)= f
(x(u, g(u)
)), de
donde
y′u(u, v) + y′v(u, v) ·dv
du= f ′
(x(u, g(u)
))·[x′u(u, v) + x′v(u, v) ·
dv
du
].
221

Ası pues, la derivada se obtiene como:
dy
dx= f ′(x) =
y′u + y′v · (dv/du)x′u + x′v · (dv/du)
.
TERCER CASO: Transformar la ecuacion en derivadas parciales
F
(x, y, z,
∂z
∂x,∂z
∂y,∂2z
∂x2,∂2z
∂x∂y, . . .
)= 0
por la ecuacion
F
(u, v, z,
∂z
∂u,∂z
∂v,∂2z
∂u2,∂2z
∂u∂v, . . .
)= 0
mediante el cambio x = x(u, v), y = y(u, v). El esquema de dependencias esel siguiente:
Las relaciones entre las derivadas de primer orden se obtienen al resolver elsistema:
∂z
∂u=
∂z
∂x· ∂x∂u
+∂z
∂y· ∂y∂u
∂z
∂v=
∂z
∂x· ∂x∂v
+∂z
∂y· ∂y∂v.
En el caso de que la transformacion venga dada por las ecuaciones u =u(x, y), v = v(x, y), se resuelve el sistema analogo
∂z
∂x=
∂z
∂u· ∂u∂x
+∂z
∂v· ∂v∂x
∂z
∂y=
∂z
∂u· ∂u∂y
+∂z
∂v· ∂v∂y.
CASO GENERAL: Cambiar las variables independientes x e y por u y vy la funcion z por w, mediante las relaciones
x = f(u, v, w)y = g(u, v, w)z = h(u, v, w)
o bien
u = F (x, y, z)v = G(x, y, z)w = H(x, y, z).
222

Debemos tener en cuenta los siguientes esquemas de dependencias
o bien
Derivando las veces que sea necesario y resolviendo los sistemas resultantes,se podrıan conocer las derivadas parciales de z con respecto a x e y enfuncion de las correspondientes derivadas parciales de w con respecto a u yv.
Sin embargo el caso mas sencillo no exige la resolucion de ningun sistema deecuaciones; este caso corresponde a las relaciones de la forma z = ϕ(u, v, w),u = f(x, y), v = g(x, y) para el cual el esquema de dependencias es
De este modo, al derivar resulta:
∂z
∂x=∂z
∂u· ∂u∂x
+∂z
∂v· ∂v∂x
+∂z
∂w· ∂w∂x
pero como∂w
∂x=∂w
∂u· ∂u∂x
+∂w
∂v· ∂v∂x,
entonces
∂z
∂x=∂z
∂u· ∂u∂x
+∂z
∂v· ∂v∂x
+∂z
∂w·(∂w
∂u· ∂u∂x
+∂w
∂v· ∂v∂x
).
223

Analogamente,
∂z
∂y=∂z
∂u· ∂u∂y
+∂z
∂v· ∂v∂y
+∂z
∂w·(∂w
∂u· ∂u∂y
+∂w
∂v· ∂v∂y
).
PROBLEMA 4.32
Resolver la ecuacion diferencial x · d2y
dx2+dy
dx+
1x
= 0.
Solucion
Si hacemos el cambio de variable x = et (o bien t = lnx), las derivadassucesivas son:
dy
dx=
dy
dt· 1x,
d2y
dx2=
d2y
dt2· 1x· 1x
+dy
dt· −1x2.
Al sustituirlas en la ecuacion, esta queda de la forma
d2y
dt2= −1
cuya solucion general, obtenida por integracion directa, es
y = − t2
2+ C · t+D = −(lnx)2
2+ C · lnx+D.
PROBLEMA 4.33
Transformar la ecuacion
x2 · d2y
dx2+ 2x · dy
dx+a2
x2· y = 0
poniendo x = 1/t.
Solucion
224

Como estamos en el caso 1.1, debemos expresar las derivadas de y respectoa x en funcion de las derivadas de y respecto a t. Tenemos ası:
dy
dx=
y′tx′t
= −t2 · y′t,
d2y
dx2=
ddt
(dydx
)x′t
= (−t2) · (−2ty′t − t2y′′t ) = 2t3y′t + t4y′′t .
Al sustituir en la ecuacion dada obtenemos:1t2· t3(
2dy
dt+ t
d2y
dt2
)+ 2 · 1
t
(−t2 dy
dt
)+ a2t2y = 0
o biend2y
dt2+ a2y = 0.
PROBLEMA 4.34
En la ecuacion diferencial
(x2 − 1) · d2y
dx2+ x · dy
dx−my = 0,
cambiar la variable independiente x por la nueva variable indepen-diente v siendo la ecuacion que las relaciona x = cos v.
Solucion
Al igual que los ejercicios anteriores,
dy
dx=
y′vx′v
= − 1sen v
· y′v,
d2y
dx2=
x′v · y′′v − x′′v · y′v(x′v)3
=1
sen2 v· y′′v −
cos vsen3 v
· y′v,
valores que llevados a la ecuacion diferencial dada la transforma en y′′v +my =0.
PROBLEMA 4.35
Dada la ecuacion diferencial
d2y
dx2+
2x1 + x2
· dydx
+y
(1 + x2)2= 0,
hacer el cambio de variable x = tg t.
225

Solucion
Nuevamente estamos en el caso 1.1, por lo que:
dy
dx=
y′tx′t
= cos2 t · y′t,
d2y
dx2=
x′t · y′′t − x′′t · y′t(x′t)3
=1
cos2 t· y′′t − y′t · 2 sen t
cos3 t
1/ cos6 t= cos4 t · y′′t − 2 sen t cos3 t · y′t.
Hecho el cambio queda
cos4 t · y′′t − 2 sen t cos3 t · y′t +2 tg t
1 + tg2 tcos2 t · y′t +
y
(1 + tg2 t)2= 0
lo que, al simplificar, da la ecuacion
cos4 t · (y′′t + y) = 0.
PROBLEMA 4.36
En la ecuacion diferencial
d3y
dx3· (x+m)3 + 3
d2y
dx2· (x+m)2 +
dy
dx· (x+m) + y = 0,
cambiar la variable independiente por v, definida mediante la re-lacion x+m = ev.
Solucion
Al igual que en los casos anteriores tenemos:
dy
dx=
y′vx′v
= e−v · y′v,
d2y
dx2=
x′v · y′′v − x′′v · y′v(x′v)3
= e−2v(y′′v − y′v).
Ademas, si derivamos nuevamente respecto a x,
d3y
dx3=
(x′v)3 [x′′v · (1/x′v) · y′′v +x′v · y′′′v · (1/x′v)−x′′′v · (1/x′v) · y′v−x′′v · y′′v · (1/x′v)]
(x′v)6
−3(x′v)2 · x′′v · (1/x′v) · (x′vy′′v − x′′vy′v)
(x′v)6
=(x′vy
′′′v − y′vx′′′v )x′v − 3(x′vy
′′v − y′vx′′v)x′′v
(x′v)5= e−3v(y′′′v − 3y′′v + 2y′v),
226

y al sustituir en la ecuacion original resulta y′′′v + y = 0.
PROBLEMA 4.37
En la ecuacion x3 · d3y
dx3+ 3x2 · d
2y
dx2+ x(a+ 1) · dy
dx− y = 0,
sustituir la variable x por t segun la relacion t = lnx.
Solucion
Aplicaremos las formulas
dy
dx=
dy/dt
dx/dt=y′tet,
d2y
dx2=
x′t · y′′t − y′t · x′′t(x′t)3
=y′′t − y′te2t
,
d3y
dx3=
x′t · (x′ty′′′t − y′tx′′′t )− 3x′′t · (x′ty′′t − y′tx′′t )(x′t)5
=y′′′t − y′t − 3(y′′t − y′t)
e3t.
Al sustituir y simplificar la expresion resulta la nueva ecuaciond3y
dt3+ a
dy
dt− y = 0.
PROBLEMA 4.38
En la ecuacion diferencial
x3 d3y
dx3+ 3x2 d
2y
dx2+ x
dy
dx− y = 0,
efectuar el cambio de variable t = lnx.
Solucion
Segun el esquema de dependencias
x←− t←− y −→ x,
derivando con respecto a x obtenemos las formulas utilizadas en el problemaanterior. Teniendo en cuenta que x = et, dichas formulas quedan de la
227

siguiente forma:
dy
dx=
y′tet
d2y
dx2=
y′′t − y′te2t
d3y
dx3=
y′′′t − 3y′′t + 2y′te3t
.
Al sustituir en la ecuacion diferencial dada, nos queda la ecuacion transfor-mada
y′′′t − yt = 0.
Observacion. El metodo utilizado en este problema se aplica en generalpara pasar de una ecuacion con coeficientes variables en otra con coeficientesconstantes.
PROBLEMA 4.39
En la ecuacion diferencial
d2y
dx2+ (ey − x) ·
(dy
dx
)3
= 0,
intercambiar la funcion con la variable independiente.
Solucion
Sabiendo que dy/dx =1
dx/dy, derivando respecto a y tenemos:
d
dy
(dy
dx
)= − d
2x/dy2
(dx/dy)2.
Por otra parte, por la regla de derivacion de una funcion compuesta,
d
dy
(dy
dx
)=
d
dx
(dy
dx
)· dxdy
=d2y
dx2· dxdy.
Agrupando las dos formulas, obtenemos:
d2y
dx2= − d
2x/dy2
(dx/dy)3.
Llevado este resultado a la ecuacion diferencial da la nueva expresiond2x
dy2+ x = ey.
228

PROBLEMA 4.40
Dada la ecuacion diferencial
d2y
dx2− x · dy
dx− y
(dy
dx
)3
= 0,
intercambiar las variables x e y.
Solucion
Si aplicamos las formulas obtenidas en el problema anterior
dy
dx=
1dx/dy
,
d2y
dx2= − d
2x/dy2
(dx/dy)3,
resulta
− d2x/dy2
(dx/dy)3− x · 1
dx/dy− y · 1
(dx/dy)3= 0,
o bien,d2x
dy2+ x
(dx
dy
)2
+ y = 0.
PROBLEMA 4.41
Transformar la ecuaciondy
dx=x+ y
x− yen coordenadas polares, defi-
nidas por las ecuaciones x = ρ cosϑ, y = ρ senϑ, escribiendo ρ enfuncion de ϑ.
Solucion
La situacion es la descrita en el segundo caso del resumen teorico, dondetenemos el siguiente esquema de dependencias
229

Utilizamos por lo tanto la formula
dy
dx=y′ϑ + y′ρ · (dρ/dϑ)x′ϑ + x′ρ · (dρ/dϑ)
=ρ cosϑ+ senϑ · (dρ/dϑ)−ρ senϑ+ cosϑ · (dρ/dϑ)
.
Al sustituir en la ecuacion y simplificar, obtenemos la nueva ecuaciondρ
dϑ= ρ.
PROBLEMA 4.42
Hallar la expresion en coordenadas polares del radio de curvaturade una curva y = y(x) dado en coordenadas cartesianas
R =
[1 + (dy/dx)2
]3/2
d2y/dx2.
Solucion
Teniendo en cuenta (comparar con el problema anterior) que
dx
dϑ=
∂x
∂ρ· ρ′(ϑ) +
∂x
∂ϑ= cosϑ · ρ′(ϑ)− senϑ · ρ(ϑ),
dy
dϑ=
∂y
∂ρ· ρ′(ϑ) +
∂y
∂ϑ= senϑ · ρ′(ϑ) + cosϑ · ρ(ϑ),
d2x
dϑ2= cosϑ · ρ′′(ϑ)− 2 senϑ · ρ′(ϑ)− cosϑ · ρ(ϑ),
d2y
dϑ2= senϑ · ρ′′(ϑ) + 2 cosϑ · ρ′(ϑ)− senϑ · ρ(ϑ),
obtenemos:
dy
dx=
dy/dϑ
dx/dϑ=
cosϑ · ρ(ϑ) + senϑ · ρ′(ϑ)− senϑ · ρ(ϑ) + cosϑ · ρ′(ϑ)
,
d2y
dx2=
ddϑ
(dydx
)dx/dϑ
=dxdϑ ·
d2ydϑ2 − dy
dϑ ·d2xdϑ2(
dxdϑ
)3 =[ρ(ϑ)]2 + 2[ρ′(ϑ)]2 − ρ(ϑ) · ρ′′(ϑ)
[cosϑ · ρ′(ϑ)− senϑ · ρ(ϑ)]3,
que sustituidos en la formula cartesiana del radio de curvatura da comoresultado su expresion polar
R =
[[ρ(ϑ)]2 + [ρ′(ϑ)]2
]3/2
[ρ(ϑ)]2 + 2[ρ′(ϑ)]2 − ρ(ϑ) · ρ′′(ϑ).
230

PROBLEMA 4.43
Transformar en coordenadas polares la ecuacion diferencial
y2 · [x+ y · y′(x)]2 − (x2 + y2) · [x · y′(x)− y]2 = 0.
Solucion
Al sustituir en la ecuacion los valores x = ρ cosϑ, y = ρ senϑ y la deriva-da
y′(x) =(dy/dϑ)(dx/dϑ)
=ρ cosϑ+ ρ′ϑ senϑ−ρ senϑ+ ρ′ϑ cosϑ
,
resulta
ρ2 sen2 ϑ
[ρ cosϑ+ ρ senϑ ·
ρ cosϑ+ ρ′ϑ senϑ−ρ senϑ+ ρ′ϑ cosϑ
]2
−ρ2
[ρ cosϑ ·
ρ cosϑ+ ρ′ϑ senϑ−ρ senϑ+ ρ′ϑ cosϑ
− ρ senϑ]2
= 0.
Simplificando esta expresion se obtiene en definitiva que [ρ′ϑ]2 sen2 ϑ−ρ2 = 0,
o bienρ′ϑρ
= ± 1senϑ
.
PROBLEMA 4.44
Transformar la ecuacion x · y · y′′(x)− x · [y′(x)]2 + y3 = 0 medianteel cambio y = ew, x = et, con w = w(t).
Solucion
A partir de las formulas
dy
dx=
dy/dt
dx/dt=ew · w′tet
= ew−t · w′t,
d2y
dx2=
dxdt ·
d2ydt2− dy
dt ·d2xdt2
(dx/dt)3
=et[ew(w′t)
2 + ew · w′′t ]− ew · w′t · et
e3t=ew+t[w′′t + (w′t)
2 − w′t]e3t
,
231

obtenemos, al sustituir, la nueva expresion
e2w−t[w′′t + (w′t)2 − w′t]− e2w−t · (w′t)2 + e3w = 0
o biend2w
dt2− dw
dt+ ew+t = 0.
PROBLEMA 4.45
Transformar la ecuacion de ondas∂2u
∂t2= a2 ∂
2u
∂x2(a 6= 0), en otra
cuyas variables independientes sean α, β, donde α = x − at, β =x+ at.
Solucion
Aplicando la formula de derivacion de funciones compuestas, tenemos elsistema
∂u
∂t=
∂u
∂α· (−a) +
∂u
∂β· a = a
(−∂u∂α
+∂u
∂β
)∂u
∂x=
∂u
∂α· 1 +
∂u
∂β· 1 =
∂u
∂α+∂u
∂β.
Volviendo a derivar estas mismas formulas, tenemos:
∂2u
∂t2=
∂
∂α
(∂u
∂t
)· ∂α∂t
+∂
∂β
(∂u
∂t
)· ∂β∂t
= a
(∂2u
∂α∂β− ∂2u
∂α2
)· (−a) + a
(∂2u
∂β2− ∂2u
∂α∂β
)· a
= a2
(∂2u
∂α2− 2
∂2u
∂α∂β+∂2u
∂β2
);
∂2u
∂x2=
∂
∂α
(∂u
∂x
)· ∂α∂x
+∂
∂β
(∂u
∂x
)· ∂β∂x
=(∂2u
∂α2+
∂2u
∂α∂β
)· 1 +
(∂2u
∂α∂β+∂2u
∂β2
)· 1
=∂2u
∂α2+ 2
∂2u
∂α∂β+∂2u
∂β2.
Al sustituir en la ecuacion dada tenemos la nueva ecuacion∂2u
∂α∂β= 0.
232

Observemos que, expresada de esta forma, la solucion de la ecuacion seobtiene por integracion directa.
PROBLEMA 4.46
Dada la ecuacion en derivadas parciales∂2z
∂x2+∂2z
∂y2= 0, hacer el
cambio de variable r =√x2 + y2.
Solucion
A partir del esquema de dependencias siguiente
las derivadas sucesivas se obtienen del siguiente modo:
∂z
∂x=
dz
dr· ∂r∂x
=dz
dr· x√
x2 + y2,
∂z
∂y=
dz
dr· ∂r∂y
=dz
dr· y√
x2 + y2,
∂2z
∂x2=
∂
∂x
(dz
dr
)· ∂r∂x
+dz
dr· ∂
2r
∂x2=d2z
dr2·(∂r
∂x
)2
+dz
dr· ∂
2r
∂x2
=d2z
dr2· x2
x2 + y2+dz
dr· y2
(x2 + y2)3/2,
∂2z
∂y2=
∂
∂y
(dz
dr
)· ∂r∂y
+dz
dr· ∂
2r
∂y2=d2z
dr2·(∂r
∂y
)2
+dz
dr· ∂
2r
∂y2
=d2z
dr2· y2
x2 + y2+dz
dr· x2
(x2 + y2)3/2.
Al sustituir los resultados en la ecuacion original resulta
d2z
dr2+
1r· dzdr
= 0.
233
PROBLEMA 4.47
Si w = w(x, y), cambiar a polares la expresion
A =∂2w
∂x2+∂2w
∂y2.
Solucion
Las ecuaciones del cambio de variable son x = r cosϑ, y = r senϑ. Si en estesistema suponemos r y ϑ como funciones de x e y, sus derivadas se calculanmediante los metodos expuestos en la seccion de funciones implıcitas. Seobtienen ası los siguientes resultados:
∂r
∂x= cosϑ ,
∂ϑ
∂x= −senϑ
r,
∂r
∂y= senϑ ,
∂ϑ
∂y=
cosϑr
.
Aplicamos ahora la regla de la cadena para calcular las derivadas de w:∂w
∂x=
∂w
∂r· ∂r∂x
+∂w
∂ϑ· ∂ϑ∂x
= cosϑ · ∂w∂r− senϑ
r· ∂w∂ϑ
∂w
∂y=
∂w
∂r· ∂r∂y
+∂w
∂ϑ· ∂ϑ∂y
= senϑ · ∂w∂r
+cosϑr· ∂w∂ϑ
.
Si llamamos ahora w1 =∂w
∂xy w2 =
∂w
∂y, entonces
∂2w
∂x2=
∂w1
∂x=∂w1
∂r· ∂r∂x
+∂w1
∂ϑ· ∂ϑ∂x,
∂2w
∂y2=
∂w2
∂y=∂w2
∂r· ∂r∂y
+∂w2
∂ϑ· ∂ϑ∂y.
Si sustituimos en las formulas anteriores los valores siguientes
∂w1
∂r= cosϑ · ∂
2w
∂r2+
senϑr2· ∂w∂ϑ− senϑ
r· ∂
2w
∂ϑ∂r,
∂w1
∂ϑ= − senϑ · ∂w
∂r+ cosϑ · ∂
2w
∂r∂ϑ− cosϑ
r· ∂w∂ϑ− senϑ
r· ∂
2w
∂ϑ2,
∂w2
∂r= senϑ · ∂
2w
∂r2− cosϑ
r2· ∂w∂ϑ
+cosϑr· ∂
2w
∂ϑ∂r,
∂w2
∂ϑ= cosϑ · ∂w
∂r+ senϑ · ∂
2w
∂r∂ϑ− senϑ
r· ∂w∂ϑ
+cosϑr· ∂
2w
∂ϑ2,
234
resulta
∂2w
∂x2= cos2 ϑ · ∂
2w
∂r2+
senϑ cosϑr2
· ∂w∂ϑ− senϑ cosϑ
r· ∂
2w
∂ϑ∂r
+sen2 ϑ
r· ∂w∂r− senϑ cosϑ
r· ∂
2w
∂r∂ϑ
+senϑ cosϑ
r2· ∂w∂ϑ
+sen2 ϑ
r2· ∂
2w
∂ϑ2
∂2w
∂y2= sen2 ϑ · ∂
2w
∂r2− senϑ cosϑ
r2· ∂w∂ϑ
+senϑ cosϑ
r· ∂
2w
∂ϑ∂r
+cos2 ϑr· ∂w∂r
+senϑ cosϑ
r· ∂
2w
∂r∂ϑ
−senϑ cosϑr2
· ∂w∂ϑ
+cos2 ϑr2
· ∂2w
∂ϑ2.
En definitiva, la ecuacion original toma la forma
A =∂2w
∂x2+∂2w
∂y2=∂2w
∂r2+
1r· ∂w∂r
+1r2· ∂
2w
∂ϑ2.
PROBLEMA 4.48
En la ecuacion∂2z
∂x2− ∂2z
∂y2= 0,
cambiar las variables independientes x e y por u y v relacionadaspor las formulas x+ y = u, x− y = v.
Solucion
Teniendo en cuenta el esquema de dependencias
235

al calcular las derivadas parciales, obtenemos:
∂z
∂x=
∂z
∂u· ∂u∂x
+∂z
∂v· ∂v∂x
=∂z
∂u+∂z
∂v∂z
∂y=
∂z
∂u· ∂u∂y
+∂z
∂v· ∂v∂y
=∂z
∂u− ∂z
∂v,
∂2z
∂x2=
(∂2z
∂u2+
∂2z
∂u∂v
)· ∂u∂x
+(∂2z
∂u∂v+∂2z
∂v2
)· ∂v∂x
=∂2z
∂u2+ 2
∂2z
∂u∂v+∂2z
∂v2
∂2z
∂y2=
(∂2z
∂u2− ∂2z
∂u∂v
)· ∂u∂y
+(∂2z
∂u∂v− ∂2z
∂v2
)· ∂v∂y
=∂2z
∂u2− 2
∂2z
∂u∂v+∂2z
∂v2.
La ecuacion original se transforma ahora en∂2z
∂u∂v= 0, la cual se puede
resolver por integracion directa.
PROBLEMA 4.49
En la expresion A = zxx−zyy, sustituir las variables (x, y) por (ϑ, ϕ)siendo las ecuaciones del cambio
eϑ+ϕ = x+ y, eϑ−ϕ = x− y.
Solucion
Despejamos en primer lugar ϑ y ϕ en funcion de las variables x e y. Obte-nemos ası:
ϑ =12
ln(x2 − y2) , ϕ =12
ln(x+ y
x− y
).
Utilizando los valores
∂ϑ
∂x=
x
x2 − y2,∂ϑ
∂y=
−yx2 − y2
,∂ϕ
∂x=
−yx2 − y2
,∂ϕ
∂y=
x
x2 − y2,
calculamos las derivadas parciales de z respecto a las variables x e y apli-
236

cando la regla de la cadena:
∂z
∂x=
∂z
∂ϑ· ∂ϑ∂x
+∂z
∂ϕ· ∂ϕ∂x
=x
x2 − y2· ∂z∂ϑ− y
x2 − y2· ∂z∂ϕ
,
∂z
∂y=
∂z
∂ϑ· ∂ϑ∂y
+∂z
∂ϕ· ∂ϕ∂y
=−y
x2 − y2· ∂z∂ϑ
+x
x2 − y2· ∂z∂ϕ
;
∂2z
∂x2=
−x2 − y2
(x2 − y2)2· ∂z∂ϑ
+x
x2 − y2·(∂2z
∂ϑ2· ∂ϑ∂x
+∂2z
∂ϑ∂ϕ· ∂ϕ∂x
)+
2xy(x2 − y2)2
· ∂z∂ϕ− y
x2 − y2·( ∂2z
∂ϕ∂ϑ· ∂ϑ∂x
+∂2z
∂ϕ2· ∂ϕ∂x
)=−(x2 + y2)(x2 − y2)2
· ∂z∂ϑ
+2xy
(x2 − y2)2· ∂z∂ϕ
+x2
(x2 − y2)2· ∂
2z
∂ϑ2− 2xy
(x2 − y2)2· ∂
2z
∂ϑ∂ϕ+
y2
(x2 − y2)2· ∂
2z
∂ϕ2,
∂2z
∂y2=
−x2 − y2
(x2 − y2)2· ∂z∂ϑ− y
x2 − y2·(∂2z
∂ϑ2· ∂ϑ∂y
+∂2z
∂ϑ∂ϕ· ∂ϕ∂y
)+
2xy(x2 − y2)2
· ∂z∂ϕ
+x
x2 − y2·( ∂2z
∂ϕ∂ϑ· ∂ϑ∂y
+∂2z
∂ϕ2· ∂ϕ∂y
)=−(x2 + y2)(x2 − y2)2
· ∂z∂ϑ
+2xy
(x2 − y2)2· ∂z∂ϕ
+y2
(x2 − y2)2· ∂
2z
∂ϑ2− 2xy
(x2 − y2)2· ∂
2z
∂ϑ∂ϕ+
x2
(x2 − y2)2· ∂
2z
∂ϕ2.
Sustituyendo el resultado en la expresion original, obtenemos en definiti-va
A =1
x2 − y2·(∂2z
∂ϑ2− ∂2z
∂ϕ2
)= e−2ϑ ·
(∂2z
∂ϑ2− ∂2z
∂ϕ2
).
PROBLEMA 4.50
Dada la ecuacion diferencial
x∂z
∂x+ y
∂z
∂y= 0,
expresarla en funcion de z y sus derivadas respecto a ρ y ϑ, siendoρ2 = x2 + y2, tg ϑ = y/x.
Solucion
Teniendo en cuenta el esquema de dependencias
237

podemos escribir las derivadas parciales como:
∂z
∂x=
∂z
∂ρ· ∂ρ∂x
+∂z
∂ϑ· ∂ϑ∂x
=∂z
∂ρ· xρ
+∂z
∂ϑ· −yρ2
∂z
∂y=
∂z
∂ρ· yρ
+∂z
∂ϑ· xρ2.
Multiplicando la primera ecuacion por x, la segunda por y y sumando:
x∂z
∂x+ y
∂z
∂y= ρ
∂z
∂ρ= 0 =⇒ ∂z
∂ρ= 0.
Esto indica que z es independiente de ρ; ası z = ϕ(ϑ) = F (y/x), que esuna funcion homogenea de grado cero (resultado previsible pues la ecuacionoriginal es la ecuacion diferencial que caracteriza -segun el teorema de Euler-a la funcion homogenea de grado cero).
PROBLEMA 4.51
Cambiar las variables independientes en la ecuacion diferencial
∂2z
∂x2+ xy2 ∂z
∂x+ y(1− y2)
∂z
∂y+ x2y2z = 0
mediante las relaciones u = xy, v = 1/y.
Solucion
El esquema de dependencias en este caso es el siguiente:
238

Las derivadas parciales se obtienen de la siguiente manera:
∂z
∂x=
∂z
∂u· ∂u∂x
+∂z
∂v· ∂v∂x
= y · ∂z∂u
∂z
∂y=
∂z
∂u· ∂u∂y
+∂z
∂v· ∂v∂y
= x · ∂z∂u− 1y2· ∂z∂v
∂2z
∂x2= y ·
(∂2z
∂u2· ∂u∂x
+∂2z
∂u∂v· ∂v∂x
)= y2 · ∂
2z
∂u2.
Sustituyendo en la ecuacion, resulta:
∂2z
∂u2+ uv2 · ∂z
∂u+ v(1− v2) · ∂z
∂v+ u2v2z = 0.
PROBLEMA 4.52
Dada la ecuacion diferencial
∂2z
∂x2− 2
∂2z
∂x∂y
√1− y2 +
∂z
∂x+∂2z
∂y2(1− y2)− y ∂z
∂y= 0,
efectuar el cambio definido por las relaciones x = t+sen v, y = cos t.
Solucion
A partir del esquema de dependencias
las derivadas tienen la forma
∂z
∂t=
∂z
∂x· ∂x∂t
+∂z
∂y· ∂y∂t
=∂z
∂x− sen t · ∂z
∂y
∂z
∂v=
∂z
∂x· ∂x∂v
+∂z
∂y· ∂y∂v
= cos v · ∂z∂x
∂2z
∂t2=
∂2z
∂x2· ∂x∂t
+∂2z
∂x∂y· ∂y∂t− cos t · ∂z
∂y− sen t ·
(∂2z
∂y∂x· ∂x∂t
+∂2z
∂y2· ∂y∂t
)=
∂2z
∂x2− 2 sen t · ∂
2z
∂x∂y+ sen2 t · ∂
2z
∂y2− cos t · ∂z
∂y.
239
Sumando ahora la tercera igualdad con el resultado de multiplicar la segundaigualdad por 1/ cos v, se obtiene:
∂2z
∂t2+
1cos v
· ∂z∂v
=∂2z
∂x2− 2 sen t · ∂
2z
∂x∂y+∂z
∂x+ sen2 t · ∂
2z
∂y2− cos t · ∂z
∂y= 0,
pues√
1− y2 = sen t. En definitiva, la ecuacion transformada es
∂2z
∂t2+
1cos v
· ∂z∂v
= 0.
PROBLEMA 4.53
Pasar a coordenadas cilındricas la ecuacion
∂2z
∂x∂y− ∂z
∂x· ∂z∂y
= 0.
Solucion
Las coordenadas cilındricas de un punto se obtienen mediante las relacionesx = r cosϕ, y = r senϕ, z = z, o bien r =
√x2 + y2, ϕ = arc tg(y/x), z = z.
Con estas relaciones y el esquema de dependencias siguiente
calculamos las derivadas parciales:
∂z
∂x=
∂z
∂r· ∂r∂x
+∂z
∂ϕ· ∂ϕ∂x
=x
r· ∂z∂r− y
r2· ∂z∂ϕ
∂z
∂y=
∂z
∂r· ∂r∂y
+∂z
∂ϕ· ∂ϕ∂y
=y
r· ∂z∂r
+x
r2· ∂z∂ϕ
∂2z
∂x∂y=
∂
∂y
(∂z
∂x
)=(∂2z
∂r2· ∂r∂y
+∂2z
∂r∂ϕ· ∂ϕ∂y
)· ∂r∂x
+∂z
∂r· ∂
2r
∂x∂y
+(∂2z
∂ϕ∂r· ∂r∂y
+∂2z
∂ϕ2· ∂ϕ∂y
)· ∂ϕ∂x
+∂z
∂ϕ· ∂
2ϕ
∂x∂y.
Sustituyendo en estas expresiones los valores
∂r
∂x=x
r,∂r
∂y=y
r,∂ϕ
∂x=−yr2,∂ϕ
∂y=
x
r2,∂2r
∂x∂y=−xyr3
,∂2ϕ
∂x∂y=y2 − x2
r4,
240

queda la ecuacion
12
sen 2ϕ
(∂2z
∂r2−(∂z
∂r
)2)
+1r
cos 2ϕ(∂2z
∂r∂ϕ− ∂z
∂r· ∂z∂ϕ
)
− 12· sen 2ϕ
r2
(∂2z
∂ϕ2−(∂z
∂ϕ
)2)
− 12· sen 2ϕ
r· ∂z∂r− cos 2ϕ
r2· ∂z∂ϕ
= 0.
PROBLEMA 4.54
Hallar la transformada de la ecuacion
∂2z
∂x2+∂2z
∂y2+ 2
∂2z
∂x∂y= 0,
mediante el cambio de variables u = −x, v = −y, w = z − (x + y).
Solucion
A partir del esquema de dependencias
se deduce que
∂w
∂x· ∂x∂x
+∂w
∂y· ∂y∂x
+∂w
∂z· ∂z∂x
=∂w
∂u· ∂u∂x
+∂w
∂v· ∂v∂x,
∂w
∂x· ∂x∂y
+∂w
∂y· ∂y∂y
+∂w
∂z· ∂z∂y
=∂w
∂u· ∂u∂y
+∂w
∂v· ∂v∂y.
Sustituyendo en estas relaciones los valores
∂w
∂x= −1,
∂w
∂y= −1,
∂w
∂z= 1,
∂u
∂x= −1,
∂u
∂y= 0,
∂v
∂x= 0,
∂v
∂y= −1,
241

obtenemos
∂z
∂x− 1 = −∂w
∂u,
∂z
∂y− 1 = −∂w
∂v.
Derivando la primera igualdad respecto a x e y y la segunda igualdad res-pecto a y, se obtiene despues de sustituir que:
∂2z
∂x2=
∂
∂x
(−∂w∂u
)=
∂
∂u
(−∂w∂u
)· ∂u∂x
=∂2w
∂u2;
∂2z
∂x∂y=
∂
∂y
(−∂w∂u
)=
∂
∂v
(−∂w∂u
)· ∂v∂y
=∂2w
∂u∂v;
∂2z
∂y2=
∂
∂y
(−∂w∂v
)=
∂
∂v
(−∂w∂v
)· ∂v∂y
=∂2w
∂v2;
de modo que la ecuacion original queda invariable.
PROBLEMA 4.55
Transformar la ecuacion diferencial
1sen2 x
(∂z
∂x
)2
+1
cos2 y
(∂z
∂y
)2
− 2 cos4 z = 0,
mediante el cambio de variable dado por las relaciones u = cosx−sen y, v = cosx + sen y, t = tg z, siendo v la nueva variable depen-diente y u y t las variables independientes.
Solucion
Utilizaremos en este problema un metodo indirecto diferente a los anteriores.Teniendo en cuenta que v depende de u y de t, podemos escribir
(∗) dv = p · du+ q · dt, siendo p =∂v
∂u, q =
∂v
∂t.
A partir de las relaciones dadas en el enunciado, calculamos las derivadasde primer orden:
dv = v′x · dx+ v′y · dy = − senx dx+ cos y dydu = u′x · dx+ u′y · dy = − senx dx− cos y dy
dt = t′z · dz = sec2 z dz.
242

Sustituyendo estos valores en (∗),
− senx dx+ cos y dy = p(− senx dx− cos y dy) + q sec2 z dz
=⇒ dz =p− 1q
senx cos2 z dx+p+ 1q
cos y cos2 z dy.
Como, a su vez, dz =∂z
∂x· dx+
∂z
∂y· dy, resulta
∂z
∂x=p− 1q
senx cos2 z ,∂z
∂y=p+ 1q
cos y cos2 z.
Sustituimos los valores obtenidos en la ecuacion diferencial dada y obtene-mos
cos4 z(p− 1q
)2
+ cos4 z(p+ 1q
)2
− 2 cos4 z = 0.
Despues de simplificar, queda la nueva ecuacion p2−q2+1 = 0, o bien(∂v
∂u
)2
−(∂v
∂t
)2
+ 1 = 0.
PROBLEMA 4.56
Tomando u, v por nuevas variables independientes y w = w(u, v)por nueva funcion, transformar la ecuacion en derivadas parcia-les
∂2z
∂x2− ∂z
∂y= 0
siendo u = x/y, v = −1/y, z =w√ye−x2/4y.
Solucion
Del enunciado deducimos el siguiente esquema de dependencias:
243

Calculamos las derivadas parciales de z a partir de la formula z =w√ye−x2/4y,
y teniendo en cuenta que w = w(x, y):
∂z
∂x=
1√y·(∂w
∂u· ∂u∂x
+∂w
∂v· ∂v∂x
)· e−x2/4y +
1√y· w · −2x
4y· e−x2/4y
=1
y√y· e−x2/4y
[∂w∂u− w · x
2
]∂z
∂y= − w
2y√y· e−x2/4y +
e−x2/4y
√y·(∂w∂u· ∂u∂y
+∂w
∂v· ∂v∂y
)+
w√y· x
2
4y2· e−x2/4y
=1
y√y· e−x2/4y
[−w
2− x
y· ∂w∂u
+1y· ∂w∂v
+w · x2
4y
]
∂2z
∂x2=
1y√y· −2x
4y· e−x2/4y
[∂w∂u− wx
2
]+
1y√y· e−x2/4y
[∂2w
∂u2· ∂u∂x− w
2− x
2· ∂w∂u· ∂u∂x
]=
1y√y· e−x2/4y
[−x2y· ∂w∂u
+wx2
4y+
1y· ∂
2w
∂u2− w
2− x
2y· ∂w∂u
].
Sustituyendo estos resultados en la ecuacion original, obtenemos
1y· ∂
2w
∂u2− 1y· ∂w∂v
= 0,
es decir, la ecuacion queda invariante.
PROBLEMA 4.57
Hallar los valores de a, b, c, d para los cuales, bajo la transformacionu = ax+ byv = cx+ dy
}, donde ad− bc 6= 0, la ecuacion
∂2f
∂x2+ 2
∂2f
∂x∂y+∂2f
∂y2= 0
quede
(a)∂2f
∂u2= 0.
(b)∂2f
∂u∂v= 0.
244

Solucion
Calculamos las derivadas parciales de f respecto a x e y, utilizando lasvariables auxiliares u y v:
∂f
∂x=
∂f
∂u· ∂u∂x
+∂f
∂v· ∂v∂x
= a · ∂f∂u
+ c · ∂f∂v
∂f
∂y=
∂f
∂u· ∂u∂y
+∂f
∂v· ∂v∂y
= b · ∂f∂u
+ d · ∂f∂v
∂2f
∂x2= a ·
(∂2f
∂u2· ∂u∂x
+∂2f
∂u∂v· ∂v∂x
)+ c ·
( ∂2f
∂v∂u· ∂u∂x
+∂2f
∂v2· ∂v∂x
)= a2 · ∂
2f
∂u2+ 2ac · ∂
2f
∂u∂v+ c2 · ∂
2f
∂v2
∂2f
∂x∂y= a ·
(∂2f
∂u2· ∂u∂y
+∂2f
∂u∂v· ∂v∂y
)+ c ·
( ∂2f
∂v∂u· ∂u∂y
+∂2f
∂v2· ∂v∂y
)= ab · ∂
2f
∂u2+ (ad+ bc) · ∂
2f
∂u∂v+ cd · ∂
2f
∂v2
∂2f
∂y2= b ·
(∂2f
∂u2· ∂u∂y
+∂2f
∂u∂v· ∂v∂y
)+ d ·
( ∂2f
∂v∂u· ∂u∂y
+∂2f
∂v2· ∂v∂y
)= b2 · ∂
2f
∂u2+ 2bd · ∂
2f
∂u∂v+ d2 · ∂
2f
∂v2.
Sustituyendo en la ecuacion, obtenemos la ecuacion transformada:
(a+ b)2 · ∂2f
∂u2+ 2(a+ b)(c+ d) · ∂
2f
∂u∂v+ (c+ d)2 · ∂
2f
∂v2= 0.
Por tanto, cuando c+d = 0 y a+b 6= 0, la ecuacion resultante tiene la forma∂2f
∂u2= 0, pero ninguna eleccion de a, b, c, d lleva a la ecuacion
∂2f
∂u∂v= 0.
245
4. MAXIMOS Y MINIMOS DE FUNCIONES.
Los conceptos de maximo y mınimo de una funcion de varias variables soncompletamente analogos a los correspondientes de funciones de una variabley tienen tambien su origen en consideraciones geometricas.
Definicion. Dada una funcion f : Rn → R, con dominio D ⊂ Rn, decimosque
(a) f tiene un maximo absoluto (o global) en un punto −→x0 ∈ D si
f(−→x0) ≥ f(−→x ), ∀−→x ∈ D;
(b) f tiene un mınimo absoluto (o global) en un punto −→x0 ∈ D si
f(−→x0) ≤ f(−→x ), ∀−→x ∈ D.
Los puntos donde una funcion toma indistintamente un valor maximo omınimo reciben el nombre generico de extremos.
En el capıtulo II enunciamos el teorema de Weierstrass que proporcionacondiciones suficientes para la existencia de extremos absolutos (pagina 84,corolario 8).
A continuacion, daremos la version local de estos conceptos.
Definicion. Dada una funcion f : Rn → R, con dominio D ⊂ Rn, decimosque
(a) f tiene un maximo relativo (o local) en un punto −→x0 ∈ D si existe unabola B(−→x0, r) centrada en −→x0 tal que f(−→x0) ≥ f(−→x ), ∀−→x ∈ B(−→x0, r)∩D;
(b) f tiene un mınimo relativo (o local) en un punto −→x0 ∈ D si existe unabola B(−→x0, r) centrada en −→x0 tal que f(−→x0) ≤ f(−→x ), ∀−→x ∈ B(−→x0, r)∩D.
En el caso de funciones de dos variables, la interpretacion geometrica deestas nociones es evidente.
Estos conceptos estan relacionados con el de punto estacionario.
Definicion. Si una funcion f : Rn → R es diferenciable en un punto −→x0 y−→∇f(x0) = 0, se dice que −→x0 es un punto estacionario o punto crıtico de lafuncion.
La relacion citada viene dada por la siguiente condicion necesaria de exis-tencia de extremos.
Teorema (criterio de las derivadas primeras). Sea D un abierto de Rn yf una funcion de clase C(1) en D. Si f tiene un extremo relativo (maximo
246

o mınimo) en un punto −→x0 ∈ D, entonces −→x0 es un punto estacionario def .
En el caso particular de funciones de dos variables, lo anterior quiere decirque el plano tangente a una funcion diferenciable en un maximo o un mınimoes necesariamente horizontal. Dicho plano queda por encima de la superficieen un entorno del punto donde la funcion tiene un maximo y queda pordebajo de la superficie en un entorno del punto donde la funcion tiene unmınimo.
Debemos observar que dicha condicion no es suficiente. Por ejemplo, si consi-deramos la funcion f(x, y) = x · y, entonces
−→∇f(x, y) = (y, x) y el gradiente
se anula solo en el origen. Sin embargo, es evidente que en dicho puntono puede haber un maximo ni un mınimo de la funcion, pues en cualquierentorno del origen la funcion toma valores positivos y negativos.
La determinacion de condiciones suficientes para la existencia de extremosrelativos se basa en el estudio del signo del termino de segundo orden enel polinomio de Taylor asociado a la funcion. Para formular dichas condi-ciones debemos recordar algunos conceptos relativos a la teorıa de formascuadraticas.
Definicion. Dada una matriz simetrica A = (aij)ni,j=1, (es decir con aij =
aji, ∀i, j), se define la forma cuadratica asociada a A como la funcion Q :Rn → R definida por
Q(−→h ) =
−→h ·A ·
−→h T =
n∑i=1
n∑j=1
aijhihj , ∀−→h = (h1, . . . , hn).
Decimos que una forma cuadratica Q es
i) definida positiva si Q(−→h ) > 0, ∀
−→h 6= 0,
ii) definida negativa si Q(−→h ) < 0, ∀
−→h 6= 0.
Una caracterizacion de esta definicion la da el siguiente criterio de Sylves-ter:
Proposicion. Si A = (aij)ni,j=1 es una matriz simetrica y denotamos por
Ak =
a11 · · · a1k...a1k . . . akk
(k = 1, . . . , n),
a los menores principales de A, entonces:
(a) La forma cuadratica asociada a A es definida positiva si y solo detAk >0, ∀k = 1, . . . , n.
247

(b) La forma cuadratica asociada a A es definida negativa si y solo si
(−1)k detAk > 0, ∀k = 1, . . . , n
(es decir, los signos de los determinantes de los menores principalesse van alternando empezando con a11 = detA1 < 0).
Con estos hechos, las condiciones suficientes para la existencia de extre-mos relativos de una funcion de varias variables se pueden enunciar comosigue:
Teorema (criterio de las derivadas segundas). Sea f : Rn → R una funcionde clase C(2) en un abierto D ⊂ Rn y −→x0 ∈ D un punto estacionario de f .Si definimos la forma cuadratica
Qx0(−→h ) =
12
n∑i=1
n∑j=1
∂2f
∂xi∂xj(x0)hihj =
12−→h ·Hf(−→x0) ·
−→h T ,
entonces:
(a) f tiene un mınimo local en −→x0 si Qx0 es definida positiva.
(b) f tiene un maximo local en −→x0 si Qx0 es definida negativa.
El recıproco de este teorema no es cierto: por ejemplo, el origen es un puntoestacionario de las funciones f(x, y) = x3 + y3 y g(x, y) = x4 + y4; en ambasfunciones, la forma cuadratica asociada a la matriz hessiana en el origen esdegenerada (es decir Q(h1, h2) = 0, ∀(h1, h2) ∈ R2); ahora bien, en el origeng tiene un mınimo pero f no tiene maximo ni mınimo.
Sin embargo, el teorema anterior sera cierto con una pequena modificacionbasada en los siguientes conceptos:
Definicion. Una forma cuadratica Q es
(a) semidefinida positiva cuando Q(−→h ) ≥ 0, ∀
−→h ∈ Rn, y es
(b) semidefinida negativa cuando Q(−→h ) ≤ 0, ∀
−→h ∈ Rn
(esto quiere decir que la forma cuadratica puede anularse tambien paravalores no nulos).
Teorema. Sea f : Rn → R una funcion de clase C(2) en un abierto D ⊂ Rn
y x0 ∈ D un punto estacionario de f . Si llamamos nuevamente
Qx0(−→h ) =
12−→h ·Hf(x0) ·
−→h T ,
entonces
(a) si f tiene un mınimo local en x0, entonces Q es semidefinida positiva;
248

(b) si f tiene un maximo local en x0, entonces Q es semidefinida negativa.
De lo anterior se deduce que, si Q es indefinida (no es semidefinida positivani semidefinida negativa) y x0 es un punto estacionario, entonces no corres-ponde a un maximo ni a un mınimo local. Estos puntos reciben el nombrede puntos de ensilladura de la funcion.
Terminaremos esta introduccion teorica con la aplicacion de los resultadosanteriores al caso mas comun de funciones de dos variables.
Teorema. Sea f : R2 → R una funcion de clase C(2) en un abierto D ⊂ R2
y (x0, y0) ∈ D un punto estacionario de f . Si llamamos
∆ = detHf(x0, y0) y a11 = D11f(x0, y0),
entonces
(a) f tiene un mınimo local en (x0, y0) si a11 > 0 y ∆ > 0;
(b) f tiene un maximo local en (x0, y0) si a11 < 0 y ∆ > 0;
(c) f tiene un punto de ensilladura en (x0, y0) si ∆ < 0.
En el caso de que ∆ = 0, debe compararse, a partir de la definicion, el valorde la funcion en (x0, y0) con el que toma en puntos de algun entorno de(x0, y0). Veremos algunos casos en los problemas que siguen.
PROBLEMA 4.58
Estudiar los extremos relativos de las funciones:
(a) f(x, y) = x3 + y3 − 3xy.
(b) f(x, y) = ln(x2 + y2 + 1).
(c) f(x, y) = x sen y.
Solucion
(a) En primer lugar, igualamos a cero las derivadas parciales de primerorden:
−→∇f(x, y) = (3x2 − 3y, 3y2 − 3x),
−→∇f(x, y) = 0⇐⇒ x2 = y, y2 = x⇐⇒
x = 1, y = 1
ox = 0, y = 0.
249

Para cada uno de los puntos estacionarios P1 = (0, 0) y P2 = (1, 1),calcularemos la matriz hessiana:
Hf(x, y) =(
6x −3−3 6y
);Hf(0, 0) =
(0 −3−3 0
), Hf(1, 1) =
(6 −3−3 6
).
En el punto P1, detHf(0, 0) = −9 < 0, lo que significa que se tratade un punto de ensilladura.
En el punto P2, detHf(1, 1) = 27 > 0; como, ademas, a11 = 6 > 0, enel punto (1, 1) la funcion alcanza un mınimo local.
En las figuras siguientes se muestra la grafica de la superficie y unarepresentacion de algunas de sus curvas de nivel. En esta se observaque en las proximidades del punto de silla (0, 0) hay zonas mas oscuras(que corresponden a valores menores de la funcion) y zonas mas claras(que corresponden a valores mayores de la funcion), mientras que enlas proximidades del punto (1, 1) donde la funcion tiene el mınimo elsombreado es cada vez mas claro.
(b) Determinamos en primer lugar los puntos estacionarios:
−→∇f(x, y) =
( 2xx2 + y2 + 1
,2y
x2 + y2 + 1
),
−→∇f(x, y) = 0⇐⇒ x = y = 0.
Calculamos a continuacion el hessiano de la funcion en el punto (0, 0):
Hf(x, y) =
(−2x2+2y2+2(x2+y2+1)2
−4xy(x2+y2+1)2
−4xy(x2+y2+1)2
2x2−2y2+2(x2+y2+1)2
)
Hf(0, 0) =(
2 00 2
).
250

Como detHf(0, 0) = 4 > 0 y a11 = 2 > 0, la funcion alcanza unmınimo local en el origen.
La figura adjunta muestra que dicho mınimo es tambien global:
(c) Calculemos los puntos estacionarios:
−→∇f(x, y) = (sen y, x cos y),−→∇f(x, y) = 0⇐⇒
{sen y = 0x = 0 o cos y = 0
}⇐⇒ x = 0, y = kπ (k ∈ Z).
Para todos ellos, el hessiano toma la forma siguiente:
Hf(x, y) =(
0 cos ycos y −x sen y
)=⇒ Hf(0, kπ) =
(0 (−1)k
(−1)k 0
).
Como detHf(0, kπ) = −1 < 0, todos los puntos estacionarios corres-ponden a puntos de ensilladura de la funcion (la funcion no tiene maxi-mos ni mınimos).
251

PROBLEMA 4.59
Determinar los extremos relativos de la funcion
f(x, y) = (x+ 1)(y − 2).
Solucion
Debido a que −→∇f(x, y) = (y − 2, x+ 1),
al resolver el sistema−→∇f(x, y) = 0, se obtiene el unico punto estacionario
(−1, 2).
El hessiano de la funcion es
Hf(x, y) =(fxx fxy
fyx fyy
)=(
0 11 0
).
Como detHf(−1, 2) = −1 < 0, la funcion tiene un punto de ensilladura en(−1, 2).
Observemos que, en un entorno del punto (−1, 2), el signo de la funcion noes constante.
PROBLEMA 4.60
Determinar los maximos y mınimos de la funcion f(x, y) = (x −y + 1)2.
252

Solucion
Para encontrar los puntos estacionarios calculamos las derivadas parcialesde primer orden:
−→∇f(x, y) =
(2(x− y + 1),−2(x− y + 1)
),
−→∇f(x, y) = 0⇐⇒ y = x+ 1.
Ahora bien, si (x0, y0) es un punto arbitrario de la recta y = x + 1, enton-ces
f(x0, y0) = 0 ≤ f(x, y), ∀(x, y) ∈ R2,
lo que significa que todos los puntos de dicha recta corresponden a mınimosabsolutos de la funcion.
Observamos la grafica adjunta donde se ilustra lo obtenido analıticamen-te:
PROBLEMA 4.61
Determinar los maximos y mınimos de la funcion f(x, y) = 3x2 +12xy + 9y2 + y3.
Solucion
Calculamos en primer lugar las derivadas parciales de primer y segundoordenes:
−→∇f(x, y) = (6x+ 12y, 12x+ 18y + 3y2),
Hf(x, y) =(
6 1212 18 + 6y
).
253
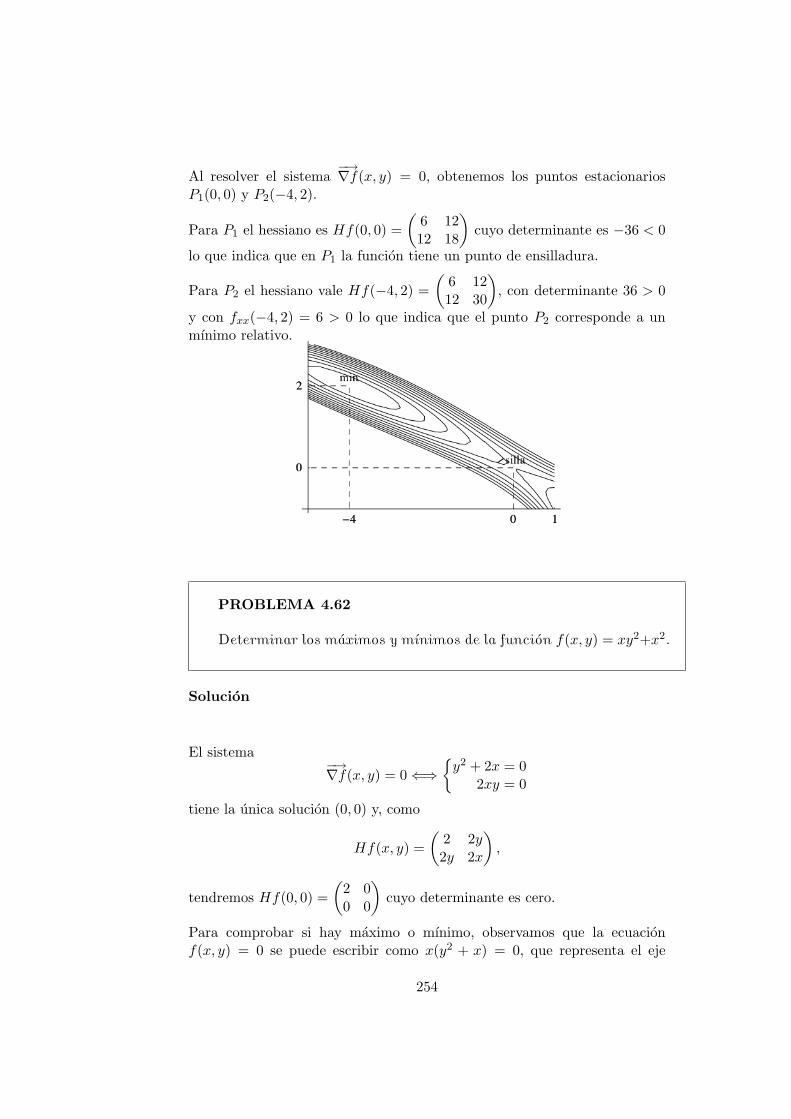
Al resolver el sistema−→∇f(x, y) = 0, obtenemos los puntos estacionarios
P1(0, 0) y P2(−4, 2).
Para P1 el hessiano es Hf(0, 0) =(
6 1212 18
)cuyo determinante es −36 < 0
lo que indica que en P1 la funcion tiene un punto de ensilladura.
Para P2 el hessiano vale Hf(−4, 2) =(
6 1212 30
), con determinante 36 > 0
y con fxx(−4, 2) = 6 > 0 lo que indica que el punto P2 corresponde a unmınimo relativo.
PROBLEMA 4.62
Determinar los maximos y mınimos de la funcion f(x, y) = xy2+x2.
Solucion
El sistema−→∇f(x, y) = 0⇐⇒
{y2 + 2x = 0
2xy = 0
tiene la unica solucion (0, 0) y, como
Hf(x, y) =(
2 2y2y 2x
),
tendremos Hf(0, 0) =(
2 00 0
)cuyo determinante es cero.
Para comprobar si hay maximo o mınimo, observamos que la ecuacionf(x, y) = 0 se puede escribir como x(y2 + x) = 0, que representa el eje
254
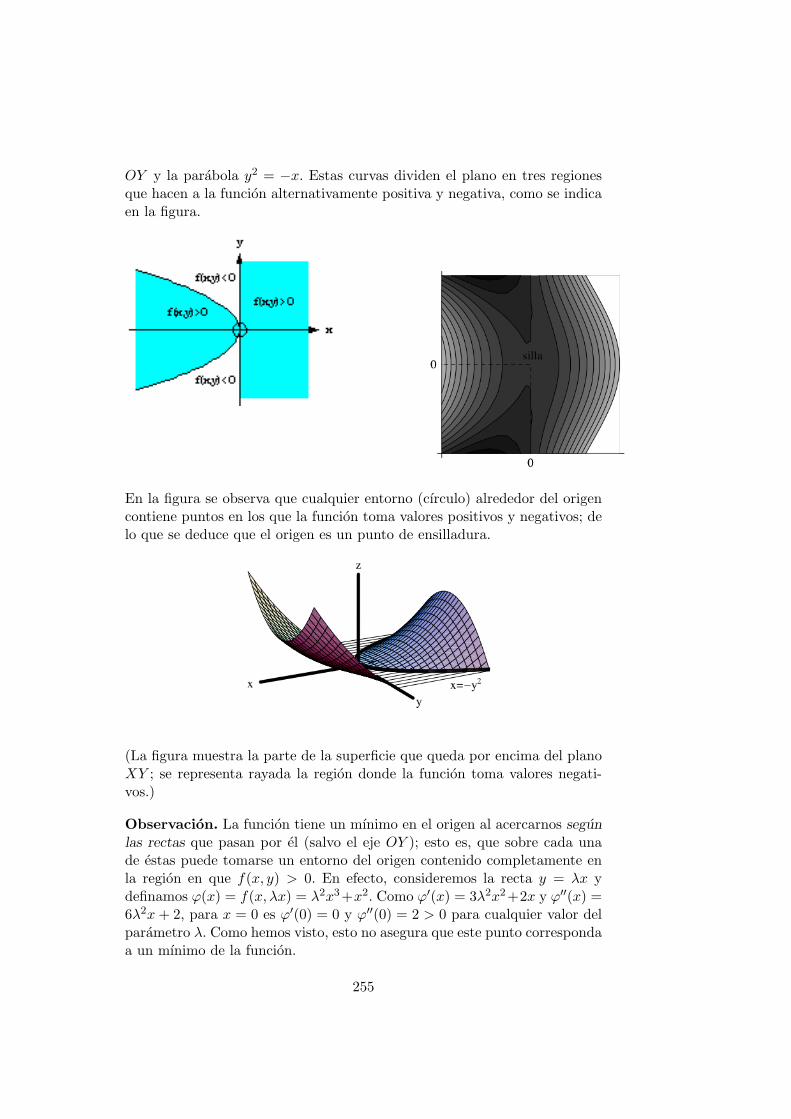
OY y la parabola y2 = −x. Estas curvas dividen el plano en tres regionesque hacen a la funcion alternativamente positiva y negativa, como se indicaen la figura.
En la figura se observa que cualquier entorno (cırculo) alrededor del origencontiene puntos en los que la funcion toma valores positivos y negativos; delo que se deduce que el origen es un punto de ensilladura.
(La figura muestra la parte de la superficie que queda por encima del planoXY ; se representa rayada la region donde la funcion toma valores negati-vos.)
Observacion. La funcion tiene un mınimo en el origen al acercarnos segunlas rectas que pasan por el (salvo el eje OY ); esto es, que sobre cada unade estas puede tomarse un entorno del origen contenido completamente enla region en que f(x, y) > 0. En efecto, consideremos la recta y = λx ydefinamos ϕ(x) = f(x, λx) = λ2x3+x2. Como ϕ′(x) = 3λ2x2+2x y ϕ′′(x) =6λ2x+ 2, para x = 0 es ϕ′(0) = 0 y ϕ′′(0) = 2 > 0 para cualquier valor delparametro λ. Como hemos visto, esto no asegura que este punto correspondaa un mınimo de la funcion.
255

PROBLEMA 4.63
Determinar los maximos y mınimos de la funcion f(x, y) = (3 −x)(3− y)(x+ y − 3).
Solucion
Calculamos las derivadas de primer orden:−→∇f(x, y) =
((3− y)(6− 2x− y), (3− x)(6− x− 2y)
),
−→∇f(x, y) = 0⇐⇒
{y = 3 o y = 6− 2xx = 3 o x = 6− 2y.
Al resolver el sistema resultante, obtenemos los puntos estacionarios
P1(3, 3), P2(0, 3), P3(3, 0), P4(2, 2).
Veamos ahora si se trata de maximos o mınimos:
Hf(x, y) =(
2y − 6 2x+ 2y − 92x+ 2y − 9 2x− 6
).
i) Hf(3, 3) =(
0 33 0
), detHf(3, 3) = −9 < 0;
ii) Hf(0, 3) =(
0 −3−3 −6
), detHf(0, 3) = −9 < 0;
iii) Hf(3, 0) =(−6 −3−3 0
), detHf(3, 0) = −9 < 0;
iv) Hf(2, 2) =(−2 −1−1 −2
), detHf(2, 2) = 3 > 0, a11 = −2 < 0.
De lo anterior deducimos que f tiene un maximo relativo en el punto P4(2, 2)y los puntos P1(3, 3), P2(0, 3), P3(3, 0) corresponden a puntos de ensilladurade la funcion.
256

PROBLEMA 4.64
Determinar los maximos y mınimos de la funcion f(x, y) = (y −x2)(y − 3x2).
Solucion
Con las derivadas de primer orden calculamos los puntos estacionarios:−→∇f(x, y) = (−4x(2y − 3x2), 2y − 4x2),−→∇f(x, y) = 0⇐⇒
{x = 0 o 2y = 3x2
2y = 4x2
}⇐⇒
{x = 0y = 0.
Tenemos un unico punto estacionario. En dicho punto el valor de la funciones f(0, 0) = 0. Sin embargo, debido a la forma de la misma, en cualquierentorno del origen, la funcion toma valores positivos y negativos. En efecto,si y > 3x2 o y < x2, f(x, y) > 0; pero si x2 < y < 3x2, f(x, y) < 0.
y = 3x2 y = x2
f(x, y) > 0
f(x, y) > 0
Esto indica que el origen es un punto de ensilladura de la funcion.
257

PROBLEMA 4.65
Determinar los maximos y mınimos de la funcion f(x, y) = 4x2 +4xy2 + 4y4.
Solucion
Calculamos en primer lugar los puntos estacionarios, que son aquellos queanulan las derivadas parciales de primer orden.
−→∇f(x, y) = 0⇐⇒
{8x+ 4y2 = 0
8xy + 16y3 = 0
}⇐⇒ x = y = 0.
El unico punto estacionario es pues P (0, 0). Calcularemos ahora el hessianode la funcion:
Hf(x, y) =(
8 8y8y 8x+ 48y2
)=⇒ Hf(0, 0) =
(8 00 0
).
Como detHf(0, 0) = 0, se trata de un caso dudoso. Observando que f(0, 0) =0 y que podemos expresar la funcion como f(x, y) = (y2 + 2x)2 + 3y4 ≥ 0,deducimos que el punto corresponde a un mınimo absoluto.
258

PROBLEMA 4.66
Dada f(x, y) = x2y2(1−x−y), hallar sus extremos relativos.
Solucion
Los puntos estacionarios se obtienen como solucion del sistema
−→∇f(x, y) = 0 ⇐⇒
{2y2x(1− x− y) + x2y2(−1) = 02x2y(1− x− y) + x2y2(−1) = 0
}⇐⇒
{xy2(−3x+ 2− 2y) = 0x2y(−3y + 2− 2x) = 0.
Si x = 0, basta tomar y = λ para cualquier λ ∈ R, y, si y = 0, cualquierx = µ, con µ ∈ R es solucion. Ahora bien, si x 6= 0 6= y, el sistema resultantetiene la unica solucion x = 2/5, y = 2/5.
Estudiamos a continuacion el hessiano de la funcion en los puntos estacio-narios. Como
Hf(x, y) =(
2y2 − 6xy2 − 2y3 4yx− 6yx2 − 2xy2
4xy − 6x2y − 6xy2 2x2 − 2x3 − 6x2y
),
entonces
Hf(2/5, 2/5) =(−24/125 −16/125−16/125 −24/125
)y detHf(2/5, 2/5) =
643125
> 0.
Como ademas Dxxf(2/5, 2/5) < 0, el punto (2/5, 2/5) corresponde a unmaximo relativo.
259

Por otra parte,
Hf(0, λ) =(
2λ2 − 2λ3 00 0
), Hf(µ, 0) =
(0 00 2µ2 − 2µ3
)cuyo determinante es siempre cero; por tanto, debemos estudiar el signo dela funcion en entornos de dichos puntos.
La figura siguiente muestra el signo de la funcion en las distintas regio-nes.
Tomando distintos entornos en cada punto, resultan los siguientes casos:
- En todos los puntos de la forma (0, λ), con λ < 1, y (µ, 0), con µ < 1,la funcion tiene un mınimo local (observemos que en dichos puntos lafuncion se anula pero en cualquier punto de sus respectivos entornosla funcion es positiva).
- En todos los puntos de la forma (0, λ), con λ > 1, y (µ, 0), con µ >1, la funcion tiene un maximo local (pues, de forma analoga al casoanterior, se observa que la funcion es negativa en puntos pertenecientesa entornos de dichos puntos).
- En los puntos (0, 1) y (1, 0), la funcion tiene puntos de ensilladura (pode-mos encontrar puntos en sus entornos donde la funcion toma valoresde signo variable).
PROBLEMA 4.67
Determinar los maximos y mınimos de la funcion f(x, y) = 6x2y3−x3y3 − x2y4.
Solucion
260

Buscamos en primer lugar los puntos estacionarios. El sistema
−→∇f(x, y) = 0⇐⇒
{xy3(12− 3x− 2y) = 0x2y2(18− 3x− 4y) = 0
tiene como soluciones los puntos (2, 3), (0, λ) (λ ∈ R) y (µ, 0) (µ ∈ R). Lasderivadas parciales de segundo orden son:
Hf(x, y) =(
2y3(6− 3x− y) xy2(36− 9x− 8y)xy2(36− 9x− 8y) 6x2y(6− x− 2y)
)y el hessiano en los distintos puntos estacionarios es:
Hf(2, 3) =(−162 −108−108 −144
);
Hf(0, λ) =(
2λ3(6− λ) 00 0
), ∀λ ∈ R;
Hf(µ, 0) =(
0 00 0
), ∀µ ∈ R.
En primer lugar, como detHf(2, 3) = 11664 > 0 y el coeficiente principales negativo, el punto (2, 3) corresponde a un maximo relativo.
Por otra parte, como detHf(0, λ) = 0 y detHf(µ, 0) = 0, todos estos puntosson casos dudosos. En todos ellos razonaremos de la siguiente manera:
Si expresamos el valor de la funcion en forma de producto
f(x, y) = x2y3(6− x− y)
y dibujamos las rectas x = 0, y = 0 y 6 − x − y = 0, para cuyos puntos seanula la funcion, habremos dividido el plano en regiones, que alternativa-mente hacen a la funcion f positiva y negativa, salvo en el paso de la rectax = 0 que, por ser doble, no produce cambios de signo a f . En la figuraadjunta se muestran los distintos signos de la funcion en cada una de estasregiones:
261

Teniendo en cuenta que la funcion se anula en todos los puntos (0, λ), (λ ∈ R)y (µ, 0), (µ ∈ R), de la figura se deduce lo siguiente:
- Los puntos (0, λ) corresponden a maximos relativos cuando λ > 6 o λ < 0y mınimos relativos cuando 0 < λ < 6.
- En los puntos (µ, 0) (∀µ ∈ R), ası como en el punto (0, 6), no hay maximosni mınimos (por haber puntos de los entornos que dan diferente signoa la funcion).
PROBLEMA 4.68
Estudiar los extremos relativos de la funcion
f(x, y) = Ax2 + 2Bxy + Cy2 + 2Dx+ 2Ey + F,
expresando la respuesta en funcion de las constantes A, B, C, D,E y F .
Solucion
Calculamos en primer lugar los puntos estacionarios:
−→∇f(x, y) = 0⇐⇒
{2Ax+ 2By + 2D = 02Bx+ 2Cy + 2E = 0
}⇐⇒
{Ax+By = −DBx+ Cy = −E.
Denotaremos por ∆ =∣∣∣∣A BB C
∣∣∣∣ = AC − B2. De este modo, si ∆ 6= 0, el
sistema anterior tiene la unica solucion
x =
∣∣∣∣−D B−E C
∣∣∣∣∆
=BE −DCAC −B2
, y =
∣∣∣∣A −DB −E
∣∣∣∣∆
=BD −AEAC −B2
.
Calculando las derivadas parciales de segundo orden, tenemos
Hf(x, y) =(
2A 2B2B 2C
)cuyo determinante es 4∆. Resulta entonces que
- Si ∆ > 0 y A > 0, tenemos un mınimo relativo.
- Si ∆ > 0 y A < 0, tenemos un maximo relativo.
- Si ∆ < 0, tenemos un punto de ensilladura.
262

En el caso de que ∆ = 0, debemos estudiar en primer lugar la existencia depuntos estacionarios. Sabemos lo siguiente:
El sistema−→∇f(x, y) = 0 tendra solucion si el rango de la matriz de los
coeficientes es igual al rango de la matriz ampliada, es decir
rang(A BB C
)= rang
(A B −DB C −E
).
Si rang(A BB C
)= 1, entonces ∃λ ∈ R : A = λB, B = λC. Ademas
A 6= 0 6= B. En este caso habra solucion si rang(A B −DB C −E
)= 1 para lo
cual debe ser D = λE.
La solucion del sistema son los puntos de la recta Ax+By+D = 0 (o Bx+Cy + E = 0). En este caso f es un plano pues
f(x, y) = x(Ax+By+D)+y(Bx+Cy+E)+Dx+Ey+F = Dx+Ey+F
y no tiene maximos ni mınimos.
Por ultimo, si rang(A BB C
)= 0, A = B = C = 0 y habra solucion cuando
D = E = 0, con lo que la funcion es constante f(x, y) = F .
PROBLEMA 4.69
Determinar los maximos y mınimos de la funcionf(x, y) =
√x2 + y2 − 2x+ 5.
Solucion
Llamando z =√x2 + y2 − 2x+ 5, tenemos
∂z
∂x=
2x− 2
2√x2 + y2 − 2x+ 5
=x− 1z
;∂z
∂y=
2y
2√x2 + y2 − 2x+ 5
=y
z;
∂2z
∂x2=
z − (x− 1)z′xz2
=z2 − (x− 1)2
z3=y2 + 4z3
;
∂2z
∂x∂y=−(x− 1)z′y
z2=−(x− 1)y
z3;
∂2z
∂y2=
z − yz′yz2
=z2 − y2
z3=x2 − 2x+ 5
z3.
263

Los puntos estacionarios se obtienen resolviendo el sistema z′x = z′y = 0;resulta entonces que P (1, 0) es el unico punto estacionario.
El hessiano de la funcion en dicho punto es
Hf(1, 0) =(
1/2 00 1/2
).
Como su determinante es positivo y zxx(1, 0) = 1/2 > 0, el punto P corres-ponde a un mınimo relativo.
Observacion. En la grafica se observa que el mınimo es precisamente elvertice del hiperboloide.
PROBLEMA 4.70
Determinar los maximos y mınimos de la funcion
f(x, y) = exp(
1x2 + 2 + cos2 y − 2 cos y
).
Solucion
Si llamamos g(x, y) = x2 + 2 + cos2 y − 2 cos y, entonces es evidente quef alcanza un maximo (resp. mınimo) en los puntos donde g alcanza unmınimo (resp. maximo), y recıprocamente. Estudiemos pues los extremos dela funcion g.
−→∇g(x, y) = (2x,−2 cos y sen y + 2 sen y),−→∇g(x, y) = 0⇐⇒
{x = 0sen y = 0 o cos y = 1
}⇐⇒ x = 0, y = kπ (k ∈ Z).
264

Por otra parte,
Hg(x, y) =(
2 00 −2 cos 2y + 2 cos y
),
Hg(0, kπ) =(
2 00 −2 + 2(−1)k
).
De este modo, detHg(0, kπ) = −4 + 4(−1)k, lo que significa que, cuandok es impar, detHg(0, kπ) = −8 < 0, y nos encontramos con puntos deensilladura.
Ahora bien, cuando k es par, se anula el determinante de la matriz hessianade modo que el criterio de la segunda derivada no es aplicable. En este caso,como g(0, kπ) = 1 y
g(x, y) = x2 + 1 + (cos y − 1)2 ≥ 1, ∀(x, y) ∈ R2,
deducimos que, en dichos puntos, la funcion g tiene mınimos (globales), esdecir, la funcion f alcanza el maximo.
PROBLEMA 4.71
Se considera la funcion f(x, y) = eax+y2+ b · sen(x2 + y2).
(a) Determinar los valores de a y b para que la funcion tenga unpunto estacionario en (0, 0) y el polinomio de Taylor de segundoorden centrado en el origen tome el valor 6 en el punto (1, 2).
(b) Con los valores de a y b obtenidos, deducir si la funcion alcanzaun maximo o un mınimo en el punto (0, 0).
Solucion
265

(a) Si el origen debe ser un punto estacionario de la funcion, deben anularselas derivadas de primer orden. Como
f ′x(x, y) = aeax+y2+ 2bx · cos(x2 + y2)
f ′y(x, y) = 2yeax+y2+ 2by · cos(x2 + y2),
entonces f ′x(0, 0) = 0⇐⇒ a = 0 pero f ′y(0, 0) = 0, ∀a, b.
Hacemos pues a = 0 y calculamos la matriz hessiana de la funcion:
Dxxf(x, y) = 2b cos(x2 + y2)− 4bx2 sen(x2 + y2)Dxyf(x, y) = −4bxy sen(x2 + y2)
Dyyf(x, y) = (2 + 4y2)ey2+ 2b cos(x2 + y2)− 4by2 sen(x2 + y2)
=⇒ Hf(0, 0) =
(2b 00 2 + 2b
).
Con estos datos, escribimos el polinomio de Taylor de segundo ordenalrededor del origen:
p2(x, y) = f(0, 0) + (x, y) ·−→∇f(0, 0) +
12· (x, y) ·Hf(0, 0) · (x, y)T
= 1 + bx2 + (1 + b)y2.
Como, por hipotesis, p2(1, 2) = 6, deducimos que
6 = 1 + b+ 4(1 + b) =⇒ b = 1/5.
(b) Con los valores obtenidos, la funcion tiene la siguiente expresion:
f(x, y) = ey2+
15· sen(x2 + y2)
y, por construccion, el origen es un punto estacionario de f .
Ademas, Hf(0, 0) =(
2/5 00 12/5
), la cual es definida positiva. Por
tanto, la funcion tiene un mınimo en el origen.
PROBLEMA 4.72
Encontrar los valores extremos de la funcion f(x, y) = x2 + y2 encada una de las siguientes regiones:
(a) A = {(x, y) ∈ R2 : x2y > 2}.
(b) B = {(x, y) ∈ R2 : x2y ≥ 2}.
Solucion
266

(a) El conjunto A es abierto lo que indica que, caso de existir valores maxi-mos o mınimos, estos deben encontrarse entre los puntos estacionariosde la funcion. Resolvemos por tanto el sistema:
−→∇f(x, y) = (0, 0)⇐⇒ (2x, 2y) = (0, 0)⇐⇒ (x, y) = (0, 0).
Como este punto no pertenece a la region dada, la funcion no tienemaximos ni mınimos en A.
(b) En este caso, el conjunto B es cerrado, aunque no acotado, lo quetampoco garantiza la existencia de maximos y mınimos de la funcion.Como en el interior de B no hay puntos estacionarios (intB = A), casode existir valores extremos, deben corresponder a puntos de la fronterade B. Para determinarlos, aplicamos en la funcion la relacion x2y = 2,
lo que produce la funcion de una variable g(y) =2y
+ y2, y 6= 0.
Sus valores extremos se calculan por el procedimiento usual:
g′(y) =−2y2
+ 2y
g′(y) = 0⇐⇒ y = 1
g′′(y) =4y3
+ 2 =⇒ g′′(1) > 0.
Concluimos entonces que, en los puntos (√
2, 1) y (−√
2, 1) de la frontera deB se alcanza el mınimo de f mientras que el maximo de f no se alcanza enB.
267
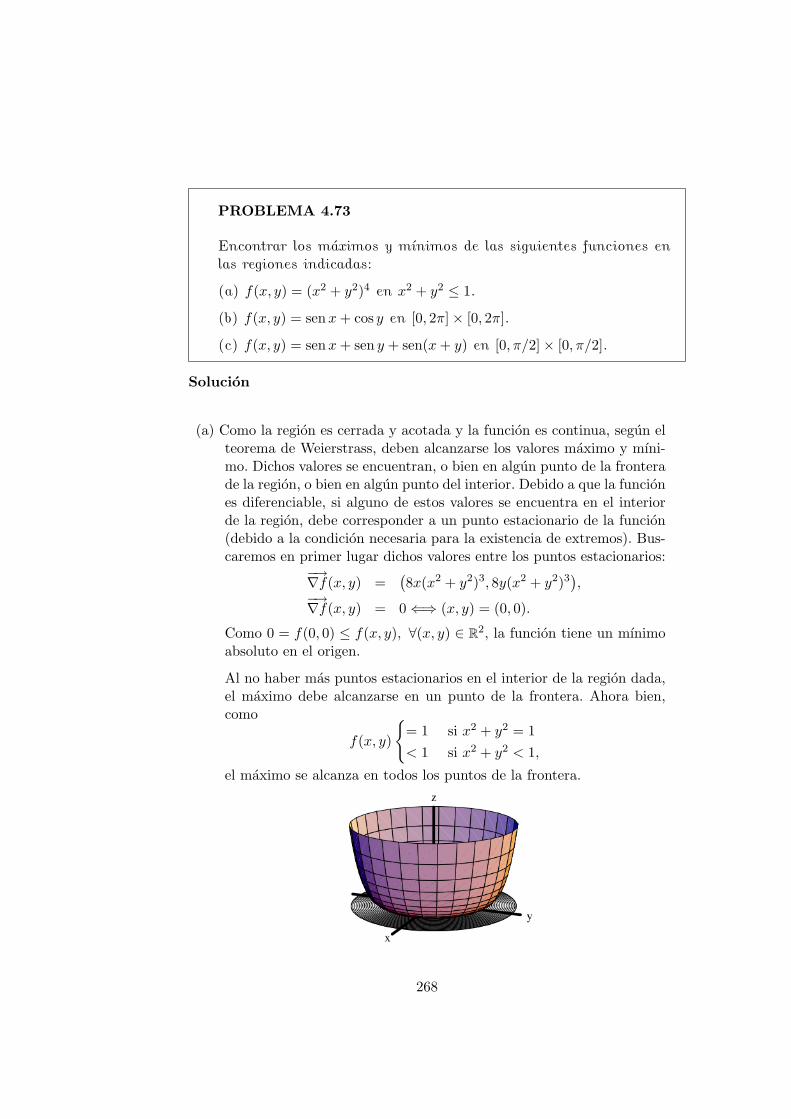
PROBLEMA 4.73
Encontrar los maximos y mınimos de las siguientes funciones enlas regiones indicadas:
(a) f(x, y) = (x2 + y2)4 en x2 + y2 ≤ 1.
(b) f(x, y) = senx+ cos y en [0, 2π]× [0, 2π].
(c) f(x, y) = senx+ sen y + sen(x+ y) en [0, π/2]× [0, π/2].
Solucion
(a) Como la region es cerrada y acotada y la funcion es continua, segun elteorema de Weierstrass, deben alcanzarse los valores maximo y mıni-mo. Dichos valores se encuentran, o bien en algun punto de la fronterade la region, o bien en algun punto del interior. Debido a que la funciones diferenciable, si alguno de estos valores se encuentra en el interiorde la region, debe corresponder a un punto estacionario de la funcion(debido a la condicion necesaria para la existencia de extremos). Bus-caremos en primer lugar dichos valores entre los puntos estacionarios:
−→∇f(x, y) =
(8x(x2 + y2)3, 8y(x2 + y2)3
),
−→∇f(x, y) = 0⇐⇒ (x, y) = (0, 0).
Como 0 = f(0, 0) ≤ f(x, y), ∀(x, y) ∈ R2, la funcion tiene un mınimoabsoluto en el origen.
Al no haber mas puntos estacionarios en el interior de la region dada,el maximo debe alcanzarse en un punto de la frontera. Ahora bien,como
f(x, y)
{= 1 si x2 + y2 = 1< 1 si x2 + y2 < 1,
el maximo se alcanza en todos los puntos de la frontera.
268

(b) Nuevamente, la continuidad de la funcion en una region cerrada y aco-tada garantiza la existencia de maximo y mınimo absolutos. Si algunode ellos esta en el interior de la region, debe corresponder a un puntoestacionario. Calculemos pues dichos puntos:−→∇f(x, y) = (cosx,− sen y),−→∇f(x, y) = 0⇐⇒
{cosx = 0sen y = 0
}⇐⇒ (x, y) =
((2m+ 1)π
2, nπ
), m, n ∈ Z.
En el interior del cuadrado [0, 2π] × [0, 2π] solo hay dos puntos esta-cionarios, (π/2, π) y (3π/2, π). Aplicaremos el criterio de las derivadassegundas para cada uno de estos puntos:
Hf(x, y) =(− senx 0
0 − cos y
)Hf(π/2, π) =
(−1 00 1
); Hf(3π/2, π) =
(1 00 1
).
Como detHf(π/2, π) = −1 < 0, la funcion tiene un punto de ensi-lladura en (π/2, π). Por otra parte, como detHf(3π/2, π) = 1 > 0 ya11 = 1 > 0, la funcion tiene un mınimo local en (3π/2, π).
Para el comportamiento de la funcion en la frontera, dividimos estaen cuatro segmentos:
i) Si x = 0, 0 ≤ y ≤ 2π, la funcion queda de la forma g1(x) = cos y.Esta funcion, como es bien sabido, alcanza su maximo en lospuntos A = (0, 0) y B = (0, π) y su mınimo en el punto M =(0, π).
ii) Si y = 0, 0 ≤ x ≤ 2π, la funcion es ahora g2(x) = 1 + senx. Estafuncion tiene el maximo en el punto P = (π/2, 0) y el mınimo enel punto Q = (3π/2, 0).
iii) Si x = 2π, 0 ≤ y ≤ 2π, la funcion es g3(y) = cos y. Nuevamente,el maximo se alcanza en los puntos C = (2π, 0) y D = (2π, 2π) yel mınimo en el punto N = (2π, π).
iv) Si y = 2π, 0 ≤ x ≤ 2π, la funcion es g4(x) = 1+senx, cuyo maxi-mo se alcanza en R = (π/2, 2π) y el mınimo en S = (3π/2, 2π).
Para determinar los extremos absolutos de la funcion basta ahoracomparar los valores de la funcion en todos los puntos obtenidoshasta ahora. Ası pues, como
f(A) = f(B) = f(C) = f(D) = 1, f(P ) = f(R) = 2,
el maximo absoluto de la funcion se alcanza en los puntos P =(π/2, 0) y R = (π/2, 2π).
269

Por otra parte, como
f(Q) = f(S) = f(M) = 0, f(N) = −1, f(3π/2, π) = −2,
deducimos que el mınimo absoluto se encuentra en el punto (3π/2, π).
En la figura siguiente mostramos la superficie desde dos puntosde vista diferentes donde se observa graficamente el resultadoobtenido analıticamente.
(c) Procederemos de forma analoga a los dos casos anteriores. En primerlugar determinamos los puntos estacionarios:
−→∇f(x, y) =
(cosx+ cos(x+ y), cos y + cos(x+ y)
),
−→∇f(x, y) = 0⇐⇒
{cosx+ cos(x+ y) = 0cos y + cos(x+ y) = 0
}.
El unico punto estacionario en el interior del cuadrado [0, π/2]×[0, π/2]es M = (π/3, π/3). En dicho punto, el hessiano es:
Hf(x, y) =(− senx− sen(x+ y) − sen(x+ y)− sen(x+ y) − senx− sen(x+ y)
)=⇒ Hf(π/3, π/3) =
(−√
3 −√
3/2−√
3/2 −√
3
).
Como detHf(π/3, π/3) = 9/4 > 0 y a11 < 0, deducimos que el puntocorresponde a un maximo local de la funcion.
Para estudiar los posibles extremos relativos en la frontera del cuadra-do, distinguimos los siguientes casos:
i) Si x = 0, 0 ≤ y ≤ π/2, la funcion queda de la forma g1(y) = 2 sen y.Tiene un mınimo en A = (0, 0) y un maximo en D = (0, π/2).
ii) Si x = π/2, 0 ≤ y ≤ π/2, la funcion es ahora g2(y) = 1 + sen y +cos y. Como
g′2(y) = 0⇐⇒ cos y = sen y ⇐⇒ y = π/4
270
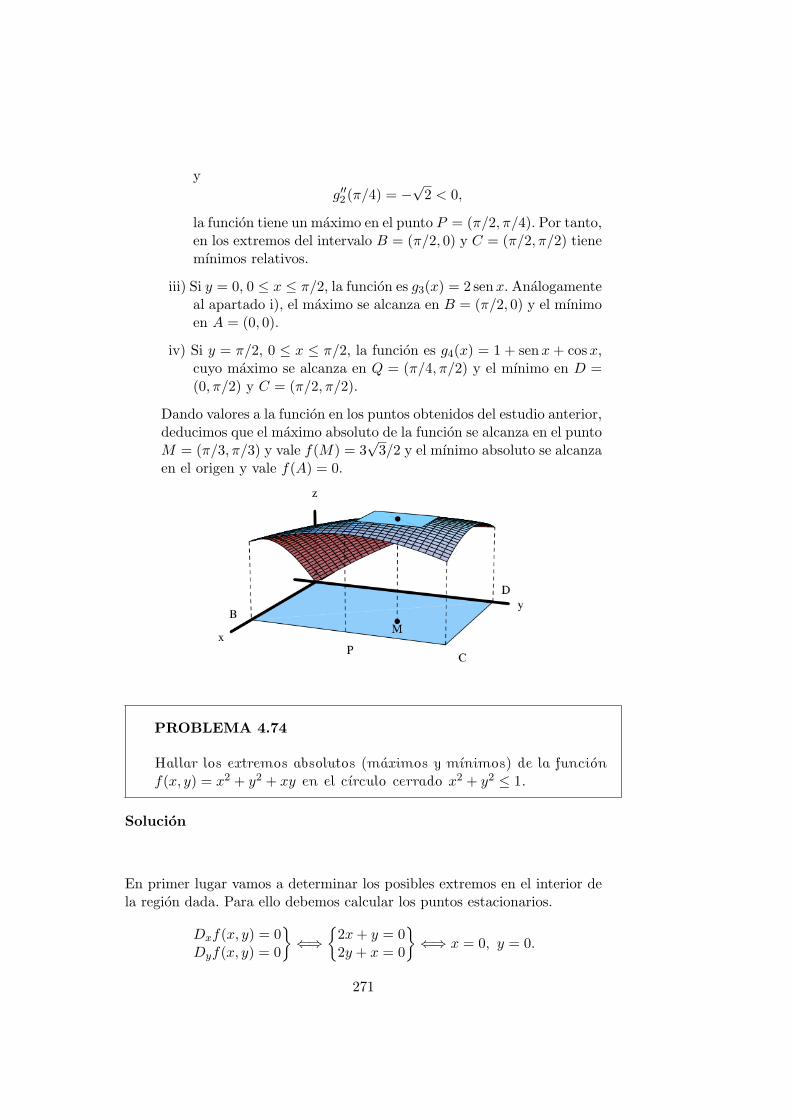
yg′′2(π/4) = −
√2 < 0,
la funcion tiene un maximo en el punto P = (π/2, π/4). Por tanto,en los extremos del intervalo B = (π/2, 0) y C = (π/2, π/2) tienemınimos relativos.
iii) Si y = 0, 0 ≤ x ≤ π/2, la funcion es g3(x) = 2 senx. Analogamenteal apartado i), el maximo se alcanza en B = (π/2, 0) y el mınimoen A = (0, 0).
iv) Si y = π/2, 0 ≤ x ≤ π/2, la funcion es g4(x) = 1 + senx+ cosx,cuyo maximo se alcanza en Q = (π/4, π/2) y el mınimo en D =(0, π/2) y C = (π/2, π/2).
Dando valores a la funcion en los puntos obtenidos del estudio anterior,deducimos que el maximo absoluto de la funcion se alcanza en el puntoM = (π/3, π/3) y vale f(M) = 3
√3/2 y el mınimo absoluto se alcanza
en el origen y vale f(A) = 0.
PROBLEMA 4.74
Hallar los extremos absolutos (maximos y mınimos) de la funcionf(x, y) = x2 + y2 + xy en el cırculo cerrado x2 + y2 ≤ 1.
Solucion
En primer lugar vamos a determinar los posibles extremos en el interior dela region dada. Para ello debemos calcular los puntos estacionarios.
Dxf(x, y) = 0Dyf(x, y) = 0
}⇐⇒
{2x+ y = 02y + x = 0
}⇐⇒ x = 0, y = 0.
271

Como Hf(0, 0) =(
2 11 2
), detHf(0, 0) = 3 > 0 y a11 = 2 > 0, el punto
(0, 0) corresponde a un mınimo local.
Para determinar los extremos en la frontera, sustituimos y2 = 1 − x2 en laecuacion de la funcion. Obtenemos ası dos funciones de una variable
f1(x) = 1 + x√
1− x2, x ∈ [−1, 1], y ≥ 0,
f2(x) = 1− x√
1− x2, x ∈ [−1, 1], y < 0
(que corresponden a las restricciones de f en las semicircuferencias superiore inferior, respectivamente).
Igualando a cero las derivadas de primer orden, resulta:
f ′1(x) = 0 =⇒√
1− x2 − x2
√1− x2
= 0 =⇒ 1− 2x2 = 0 =⇒ x = ±√
2/2,
f ′2(x) = 0 =⇒ −√
1− x2 +x2
√1− x2
= 0 =⇒ 1− 2x2 = 0 =⇒ x = ±√
2/2.
Los puntos crıticos en la frontera son entonces
(√
2/2,√
2/2), (−√
2/2,√
2/2),(√
2/2,−√
2/2), (−√
2/2,−√
2),(1, 0), (−1, 0)
(Los puntos (1, 0) y (−1, 0) tambien son puntos crıticos pues en ellos noexiste la derivada de f1).
El valor de la funcion en los puntos crıticos es el siguiente:
f(√
2/2,√
2/2) = f(−√
2/2,−√
2) = 3/2,f(−√
2/2,√
2/2) = f(√
2/2,−√
2/2) = 1/2,f(1, 0) = f(−1, 0) = 1.
Debido a que f(0, 0) = 0, lo anterior permite deducir que el maximo es
f(√
2/2,√
2/2) = f(−√
2/2,−√
2/2) = 3/2
y el mınimo es f(0, 0) = 0.
272

PROBLEMA 4.75
Hallar los maximos absolutos de la funcion
f(x, y) = x3 + 3x− 6xy + 3y2
en la porcion del plano Q limitada por OX+, OY +, x = 2, y = 2.
Solucion
Como Q es cerrado y acotado, es compacto; la continuidad de f garantiza laexistencia de un maximo y un mınimo absolutos en dicha region. Los puntosestacionarios de la funcion son
D1f(x, y) = 0D2f(x, y) = 0
}⇐⇒
{3x2 + 3− 6y = 0−6x+ 6y = 0
}⇐⇒
{3x2 − 6x+ 3 = 0
x = y.
La unica solucion es el punto (1, 1), interior al cuadrado Q. El hessiano endicho punto es:
Hf(1, 1) =(
6 −6−6 6
)cuyo determinante es cero. Calculamos entonces la diferencia f(x, y)−f(1, 1)en puntos(x, y) proximos a (1, 1). Si hacemos en particular x = 1 + h, y =1 + h, obtenemos que
f(1+h, 1+h)−f(1, 1) = (1+h)3−3(1+h)−6(1+h)2 +3(1+h)2−1 = −h3
que puede tomar valores positivos y negativos en un entorno del cero. Deaquı se deduce que la funcion presenta un punto de ensilladura en (1, 1).
273

Como el maximo no se alcanza en el interior, debe ser un punto de la fron-tera de Q. Si restringimos la funcion a cada segmento que la limita, tene-mos:
i) Si y = 0, x ∈ [0, 2], entonces ϕ1(x) = f(x, 0) = x3 + 3x.
Como ϕ′1(x) = 3x2 + 3 > 0, no tiene extremos relativos en el intervalox ∈ (0, 2). En particular f(0, 0) = 0 y f(2, 0) = 14.
ii) Si x = 0, y ∈ [0, 2], entonces ϕ2(y) = f(0, y) = 3y2, que tampoco tieneextremos relativos en el intervalo abierto y ∈ (0, 2). Tiene un mınimoen el origen, f(0, 0) = 0 y un maximo en el punto (0, 2), f(0, 2) = 12.
iii) Si x = 2, y ∈ [0, 2], ϕ3(y) = f(2, y) = 14− 12y + 3y2.
Su derivada es ϕ′3(y) = −12 + 6y, que se anula en y = 2. El valor dela funcion es f(2, 2) = 2.
iv) Si y = 2, x ∈ [0, 2], ϕ4(x) = f(x, 2) = x3 − 9x+ 12.
La derivada es ahora ϕ′4(x) = 3x2−9, que se anula en x =√
3 y dondela funcion vale f(
√3, 2) = −6
√3 + 12 > 0.
Comparando todos los valores obtenidos, resulta que el maximo se alcanzaen el punto (2, 0) y el mınimo en el origen.
274

PROBLEMA 4.76
Se consideran las regiones
A = {(x, y) ∈ R2 : x ≤ 0},B = {(x, y) ∈ R2 : y ≥ 0},C = {(x, y) ∈ R2 : y − x ≤ 2},
y la funcion de dos variables f(x, y) = ex−y(x2 − 2y2).
Calcular los extremos de f en las regiones A ∪ B ∪ C yA ∩B ∩ C.
Solucion
Representando graficamente las regiones se observa que A ∪ B ∪ C = R2 yA ∩B ∩ C es el triangulo cerrado de vertices (0, 0), (0, 2) y (−2, 0).
Determinamos en primer lugar los puntos estacionarios de la funcion:
∂f
∂x= 0⇐⇒ ex−y(2x+ x2 − 2y2) = 0⇐⇒ 2x+ x2 − 2y2 = 0
∂f
∂y= 0⇐⇒ ex−y(−4y − x2 + 2y2) = 0⇐⇒ −4y − x2 + 2y2 = 0.
Al resolver el sistema se obtienen las soluciones (0, 0) y (−4,−2).
(a) En A ∪ B ∪ C ambos son puntos interiores. Calcularemos el hessianoen dichos puntos:
∂2f
∂x2= ex−y(2 + 2x+ 2x+ x2 − 2y2),
∂2f
∂x∂y= ex−y(−4y − 2x− x2 + 2y2),
∂2f
∂y2= ex−y(−4 + 4y + 4y + x2 − 2y2).
Como
Hf(0, 0) =(
2 00 −4
), detHf(0, 0) = −8 < 0,
de modo que (0, 0) es punto de ensilladura.
275

Analogamente, como
Hf(−4,−2) =(−6e−2 8e−2
8e−2 −12e−2
),
detHf(−4,−2) = 8e−4 > 0 y a11 = −6e−2 < 0,
deducimos que P = (−4,−2) corresponde a un maximo.
(b) En A∩B ∩C los puntos estacionarios no estan en el interior, de modoque los extremos deben estar en la frontera. Escribimos para ello larestriccion de la funcion en cada uno de los segmentos que forman eltriangulo:
i) Si x = 0, g1(y) = f(x, y)|x=0 = −2y2e−y, 0 ≤ y ≤ 2.
Como g′1(y) = y (−4 + 2y)e−y, entonces
g′1(y) = 0⇐⇒ y = 0, y = 2,
lo que da lugar a los puntos estacionarios (0, 0) y (0, 2).
ii) Si y = 0, g2(x) = f(x, y)|y=0 = x2ex, −2 ≤ x ≤ 0.
En este caso, g′2(x) = x(2 + x)ex y
g′2(x) = 0⇐⇒ x = 0, x = −2,
dando lugar a los puntos (0, 0) y (−2, 0).
iii) Si y = x + 2, g3(x) = f(x, y)|y=x+2 = e−2(−x2 − 8x − 8), −2 ≤x ≤ 0.
Ahora g′3(x) = e−2(−2x − 8), que no se anula en ningun puntodel segmento.
En definitiva, los posibles extremos corresponden a los puntos (0, 0),(0, 2) y (−2, 0). Al evaluar la funcion en dichos puntos, se obtiene
f(0, 0) = 0, f(0, 2) = −8e−2, f(−2, 0) = 4e−2.
Por tanto, el mınimo absoluto se alcanza en (0, 2) y el maximo absolutose alcanza en (−2, 0).
276

PROBLEMA 4.77
Sea f(x, y) = (x2+y2)e−3x+y. Calcular los valores maximo y mınimode f en las siguientes regiones:
A = {(x, y) ∈ R2 : x2 + y2 < 1}B = {(x, y) ∈ R2 : x2 + y2 ≤ 1}C = {(x, y) ∈ R2 : 3x− y ≥ 0}D = {(x, y) ∈ R2 : x ≥ 0, |y| ≤ x}.
Solucion
Clasificaremos en primer lugar los puntos estacionarios de la funcion:
−→∇f(x, y) =
((2x− 3x2 − 3y2)e−3x+y, (2y + x2 + y2)e−3x+y
)−→∇f(x, y) = (0, 0)⇐⇒ x = 0, y = 0 o x = 3/5, y = −1/5.
Es evidente que f(0, 0) = 0 ≤ f(x, y), ∀(x, y) ∈ R2, lo que significa que lafuncion tiene un mınimo absoluto en el origen. Como el origen esta contenidoen las cuatro regiones dadas, solo necesitamos determinar el maximo de lafuncion en cada region.
Por otra parte, si aplicamos el criterio de las derivadas de segundo orden,deducimos que la funcion tiene un punto de ensilladura en (3/5,−1/5).
277

(a) Como el conjunto A es abierto, los valores extremos de f deben encon-trarse en su interior y, por tanto, deben corresponder a puntos esta-cionarios. Del analisis anterior se deduce que no se alcanza el maximode la funcion en el conjunto A.
(b) En este caso, como el conjunto B es compacto y la funcion continua,necesariamente se alcanza el maximo de la funcion y este debe encon-trarse en la frontera del conjunto.
Si parametrizamos la frontera de B como x = cos t, y = sen t, −π ≤t ≤ π, y definimos la funcion
ϕ(t) = f(cos t, sen t) = e−3 cos t+sen t, −π ≤ t ≤ π,
entonces el punto (x0, y0) ∈ B donde f alcance el maximo sera de laforma (cos t0, sen t0), siendo t0 el punto donde ϕ alcance el maximoen [−π, π]. Como ϕ es una funcion de una variable, calcularemos sumaximo por los metodos usuales:
ϕ′(t) = (3 sen t+ cos t)e−3 cos t+sen t
ϕ′(t) = 0⇐⇒ tg t = −1/3⇐⇒ t = arc tg(−1/3) o t = π + arc tg(−1/3).
Denotamos los puntos crıticos por t1 = arc tg(−1/3) y t2 = π +arc tg(−1/3), y estudiamos el signo de la derivada ϕ′ en los distin-tos intervalos que estos puntos determinan:
(−π, t1) (t1, t2) (t2, π)
ϕ′(t) < 0 > 0 < 0
Deducimos entonces que el maximo de ϕ se alcanza en el punto t2, loque significa que el maximo de f se alcanza en el punto (−3/
√10, 1/
√10).
278
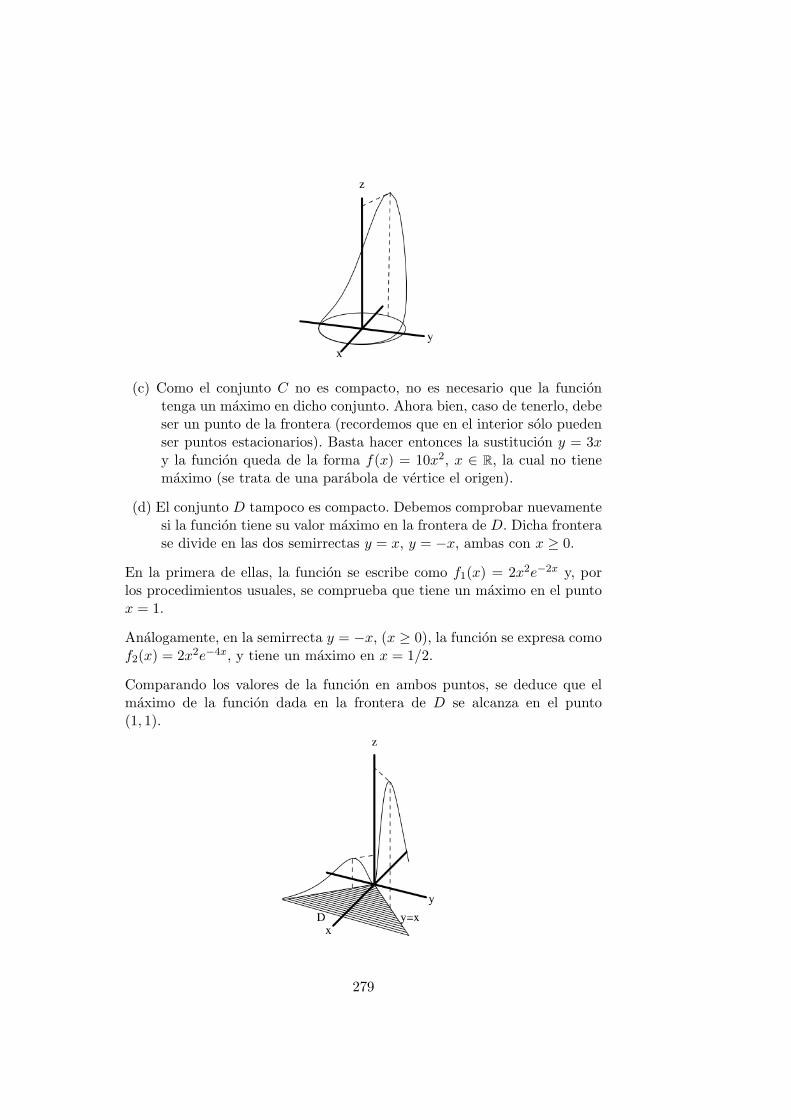
(c) Como el conjunto C no es compacto, no es necesario que la funciontenga un maximo en dicho conjunto. Ahora bien, caso de tenerlo, debeser un punto de la frontera (recordemos que en el interior solo puedenser puntos estacionarios). Basta hacer entonces la sustitucion y = 3xy la funcion queda de la forma f(x) = 10x2, x ∈ R, la cual no tienemaximo (se trata de una parabola de vertice el origen).
(d) El conjunto D tampoco es compacto. Debemos comprobar nuevamentesi la funcion tiene su valor maximo en la frontera de D. Dicha fronterase divide en las dos semirrectas y = x, y = −x, ambas con x ≥ 0.
En la primera de ellas, la funcion se escribe como f1(x) = 2x2e−2x y, porlos procedimientos usuales, se comprueba que tiene un maximo en el puntox = 1.
Analogamente, en la semirrecta y = −x, (x ≥ 0), la funcion se expresa comof2(x) = 2x2e−4x, y tiene un maximo en x = 1/2.
Comparando los valores de la funcion en ambos puntos, se deduce que elmaximo de la funcion dada en la frontera de D se alcanza en el punto(1, 1).
279

PROBLEMA 4.78
Hacer maximo el volumen de un solido rectangular que tiene trescaras sobre los planos coordenados y un vertice en el plano x/a+y/b+ z/c = 1 (a, b, c > 0).
Solucion
Si llamamos P = (x, y, z) al punto de interseccion del prisma con el plano,el volumen puede expresarse mediante la formula siguiente:
V = x · y · z = c · x · y ·(1− x
a− y
b
),
en la region 0 < x < a, 0 < y < b.
El problema se reduce entonces a determinar el maximo de la funcion
f(x, y) = c · x · y ·(1− x
a− y
b
).
Para calcular los puntos estacionarios, resolvemos la ecuacion−→∇f(x, y) =
0:
−→∇f(x, y) =
(cy(1− 2x
a− y
b
), cx(1− x
a− 2y
b
)),
−→∇f(x, y) = 0⇐⇒
{y = 0 o 2x
a + yb = 1
x = 0 o xa + 2y
b = 1.
El sistema anterior tiene como solucion los puntos (0, 0), (a, 0), (0, b) y(a/3, b/3), de los cuales solo este ultimo puede dar volumen maximo.
280

En efecto, como
Hf(x, y) =( −2cy
a c(1− 2x
a −2yb
)c(1− 2x
a −2yb
) −2cxb
)=⇒ Hf(a/3, b/3) =
(−2bc3a
−c3
−c3
−2ac3b
),
donde detHf(a/3, b/3) = c2/3 > 0 y a11 =−2bc3a
< 0, lo que efectivamenteindica que, en dicho punto, se alcanza el maximo de la funcion.
PROBLEMA 4.79
Inscribir en el segmento de paraboloide elıptico
z
c=x2
a2+y2
b2, z = c,
un paralelepıpedo de volumen maximo.
Solucion
Si denotamos por P = (x, y, z) el punto en el primer octante de intersecciondel paraboloide con el paralelepıpedo, podemos escribir el volumen de dichoparalelepıpedo con la formula siguiente:
V = 2x · 2y · (c− z) = 4cxy(1− x2
a2− y2
b2
), x, y, z > 0.
Ası pues, el problema se reduce al de encontrar el maximo de la funcionV = f(x, y), con x, y > 0.
Calculamos las derivadas parciales de primer orden para determinar los pun-tos estacionarios:
−→∇f(x, y) =
(−8ca2
x2y + 4cy(1− x2
a2− y2
b2
),−8cb2
xy2 + 4cx(1− x2
a2− y2
b2
)).
Al resolver el sistema−→∇f(x, y) = 0, obtenemos los puntos estacionarios
(0, 0), (−a, 0), (−a/2,−b/2), (−a/2, b/2), (a/2,−b/2), (a/2, b/2), (a, 0), (−a, 0),(0,−b) y (0, b) de los cuales solo el punto (a/2, b/2) es admisible.
281

Para comprobar que este punto corresponde al maximo de la funcion, utili-zamos el criterio de la segunda derivada:
Hf(x, y) =
−24cxya2 4c
(1− 3x2
a2 − 3y2
b2
)4c(1− 3x2
a2 − 3y2
b2
)−24cxy
b2
=⇒ Hf(a/2, b/2) =
(−6bc/a −2c−2c −6ac/b
).
Como detHf(a/2, b/2) = 32c2 > 0 y a11 = −6bc/a < 0, el maximo de lafuncion se alcanza efectivamente en dicho punto.
PROBLEMA 4.80
Hallar la distancia entre las rectas en R3 de ecuacionesx− 1 = y/2 = z y x = y = z.
Solucion
Un punto arbitrario de la primera recta tiene por coordenadas P = (x, 2x−2, x − 1) y uno de la segunda recta se puede escribir como Q = (x′, x′, x′).La distancia entre ellos es
d(P,Q) =√
(x− x′)2 + (2x− 2− x′)2 + (x− 1− x′)2.
Ahora bien, si d(P,Q) es mınima, tambien su cuadrado sera mınimo. Pode-mos pues reducir el problema al de minimizar la funcion
f(x, x′) = (x− x′)2 + (2x− 2− x′)2 + (x− 1− x′)2.
Como∂z
∂x= 2(x− x′) + 2(2x− 2− x′) · 2 + 2(x− 1− x′),
∂z
∂x′= −2(x− x′)− 2(2x− 2− x′)− 2(x− 1− x′),
282

los puntos estacionarios se obtienen del sistema
x− x′ + 4x− 4− 2x′ + x− 1− x′ = 0x− x′ + 2x− 2− x′ + x− 1− x′ = 0,
lo que da como solucion x = 3/2, x′ = 1. Al ser el unico punto estacionario,debe corresponder a un mınimo (se trata de dos rectas que se cruzan), ydicha distancia mınima vale d =
√1/4 + 1/4 =
√2/2.
[Comparar el metodo expuesto en este problema con el desarrollado en elcapıtulo I, problema 1.17.]
283

5. EXTREMOS CONDICIONADOS. MULTIPLICADORES DELAGRANGE.
Cierto tipo de problemas de extremos consiste en encontrar los valores maxi-mo y mınimo de una funcion cuyas variables estan sometidas a ciertas con-diciones de dependencia; estos reciben el nombre de problemas de maximosy mınimos condicionados.
Por ejemplo, en el caso de una funcion de dos variables z = f(x, y), si estasestan relacionadas por la condicion y = g(x), los extremos condicionados def son precisamente los maximos y mınimos de la funcion de una variablez = f
(x, g(x)
). Geometricamente, el problema consiste en encontrar los
valores extremos de la curva en R3 que es la interseccion de las superficiesz = f(x, y), y = g(x).
El planteamiento general de estos problemas es el siguiente:
Problema. Encontrar el valor maximo (o mınimo) de una funcion f : Rn →R, en un dominio M definido del siguiente modo:
M = {−→x ∈ Rn : F i(−→x ) = 0, 1 ≤ i ≤ m}.
El conjunto de funciones F i : Rn → R (1 ≤ i ≤ m) constituye lo que llama-remos restricciones de las variables. Denotaremos por f |M a la restriccionde f al conjunto M .
Estableceremos a continuacion las nociones basicas que permiten enunciarcondiciones necesarias y suficientes para la existencia de maximos y mınimoscondicionados.
Definicion. Dado un entero positivo r < n, decimos que un subconjuntoM de Rn es una variedad r-dimensional (o r-variedad) de clase C(q) cuando∀−→x ∈ M , existe U ⊂ Rn abierto que contiene a −→x y existe una funcionF : U → Rn−r, con F ∈ C(q)(U), tal que
i) rang JF (−→x ) = n− r, ∀−→x ∈ U , y
ii) M ∩ U = {−→x ∈ U : F (−→x ) =−→0 }.
Es facil, a partir de la definicion, demostrar el siguiente resultado.
Proposicion. Sean D un abierto de Rn y F : D → Rn−r una funcionde clase C(q) en D. Entonces el conjunto M = {−→x ∈ Rn : F (−→x ) =−→0 , rang JF (−→x ) = n− r} es una r-variedad de clase C(q).
Por ejemplo, si F : Rn → R es una funcion de clase C(1), cualquier conjuntode nivel Kc = {−→x ∈ Rn : F (−→x ) = c} no vacıo y que no contenga puntosestacionarios de F es una (n− 1)-variedad.
284

Con estos conceptos se prueba la siguiente condicion necesaria de existenciade extremos condicionados.
Teorema de los multiplicadores de Lagrange. Sean M una r-variedadde Rn de clase C(1) y f : D → R una funcion definida en un abierto D ⊂ Rn,con f ∈ C(1)(D) y M ⊂ D. Si f |M tiene un extremo relativo en −→x0, entoncesexisten constantes λ1, . . . , λm ∈ R (m = n − r) tales que −→x0 es un puntoestacionario de la funcion
g = f + λ1F1 + · · ·+ λmF
m,
donde F 1, . . . , Fm son las componentes de la funcion F asociada a la varie-dad M .
Este resultado indica que, en un problema de busqueda de extremos con-dicionados, los unicos posibles puntos de extremo local se encuentran entrelas soluciones del sistema{ ∂g
∂xi(−→x ) = 0, 1 ≤ i ≤ n
F j(−→x ) = 0, 1 ≤ j ≤ m
de m+ n ecuaciones con las m+ n incognitas x1, . . . , xn, λ1, . . . , λm.
Esto sugiere tambien considerar la funcion de m+ n variables
g(x1, . . . , xn, λ1, . . . , λm) = f(x1, . . . , xn) +m∑
j=1
λjFj(x1, . . . , xn)
y calcular los puntos estacionarios de g enM×Rm, los cuales seran los unicos
posibles valores donde f tenga un extremo relativo (observar que∂g
∂λj= F j).
Se reduce ası el problema de extremos condicionados a un problema deextremos ordinarios.
Las condiciones suficientes para la existencia de extremos pueden determi-narse de la siguiente forma:
Teorema. Se considera la funcion g = f + λ1F1 + · · ·+ λmF
m.
(a) Si en un punto −→x0 la funcion alcanza un maximo relativo, entonces la
forma cuadratica correspondiente a g, Qx0(h) =n∑
i=1
n∑j=1
Dijg(−→x0)hihj,
es semidefinida negativa en un entorno reducido de −→x0.
(b) Si Qx0(h) > 0 en algun entorno reducido de −→x0, entonces la funcionalcanza un mınimo relativo en −→x0.
En la mayorıa de los ejemplos practicos, para determinar si un punto es-tacionario corresponde a un maximo o un mınimo, utilizaremos metodos
285

indirectos, sugeridos por cada situacion particular. En los problemas quesiguen iremos mostrando algunos de los metodos posibles.
PROBLEMA 4.81
Sea f : R2 → R la funcion definida por f(x, y) = xy y M = {(x, y) :x2+y2 = 2a2}, (a > 0). Determinar los maximos, mınimos y puntosde ensilladura de f |M .
Solucion
Observemos en primer lugar que M es una variedad 1-dimensional. Paraello, dado cualquier (x, y) ∈M , habra que probar que existen
i) un abierto U ⊂ R2 que contiene a (x, y) y
ii) una funcion F : U → R, F ∈ C(1)(U)
tales que rang JF (x, y) = 1 y M ∩ U = {(x, y) ∈ U : F (x, y) = 0}.
En efecto, sea F (x, y) = x2 + y2− 2a2. Por ser un polinomio, F ∈ C(∞)(U).Ademas JF (x, y) = (2x, 2y); entonces rang JF (x, y) = 1 si (x, y) 6= (0, 0).Esto sugiere considerar el abierto U = R2 \ {(0, 0)} y la funcion F arribadefinida, pues M ∩ U = {(x, y) ∈ U : F (x, y) = 0}.
Podemos pues aplicar el teorema de los multiplicadores de Lagrange, queasegura que los extremos de f en encuentran entre los puntos estacionariosde la funcion g = f +λF . Calcularemos los puntos estacionarios de g:
Dxg(x, y, λ) = 0⇐⇒ y + 2xλ = 0Dyg(x, y, λ) = 0⇐⇒ x+ 2yλ = 0Dλg(x, y, λ) = 0⇐⇒ x2 + y2 − 2a2 = 0.
Si λ = 0, entonces x = y = 0, de donde 0 = 2a2, lo que es absurdo puesa > 0.
Si λ 6= 0, entonces
λ = −y/2x = −x/2y =⇒ −2y2 + 2x2 = 0 =⇒ x2 − y2 = 0.
Como, ademas x2 + y2 = 2a2, las soluciones del sistema dan los puntosestacionarios (a, a), (−a, a), (a,−a) y (−a,−a).
Observamos que el conjunto M es compacto: es cerrado por ser la imageninversa de un cerrado por una aplicacion continua, F−1({0}) = M , y acotado
286

porque M esta contenido en cualquier bola de centro el origen y radio mayorque a
√2. Como ademas f |M es continua, entonces f |M alcanza su maximo
y mınimo absolutos.
Debido a que f(−a,−a) = f(a, a) = a2 y f(−a, a) = f(a,−a) = −a2,los puntos (a, a) y (−a,−a) corresponden al maximo absoluto y (a,−a) y(−a, a) al mınimo absoluto.
PROBLEMA 4.82
Sea f : R2 → R la funcion definida por f(x, y) = x3 + y3 y M ={(x, y) : x2 − y2 = 1}. Determinar los extremos relativos de f |M .
Solucion
Observamos en primer lugar que M es una variedad pues existen un abiertoU = R2\{(0, 0)} y una funcion F : U → R, definida por F (x, y) = x2−y2−1,tales que F ∈ C(∞)(U), rang JF (x, y) = 1 (pues JF (x, y) = (2x,−2y))y
M ∩ U = {(x, y) ∈ U : F (x, y) = 0}.
Podemos pues aplicar el teorema de los multiplicadores de Lagrange y con-siderar la funcion g(x, y) = x3 + y3 + λ(x2 − y2 − 1).
Calculamos los puntos estacionarios de g:
Dxg(x, y) = 0 ⇐⇒ 3x2 + 2λx = 0⇐⇒ x(3x+ 2λ) = 0Dyg(x, y) = 0 ⇐⇒ 3y2 − 2λy = 0⇐⇒ y(3x+ 2λ) = 0F (x, y) = 0 ⇐⇒ x2 − y2 = 1.
287

Para resolver el sistema distinguiremos los siguientes casos:
- Si x 6= 0, y = 0, entonces 3x + 2λ = 0, de donde x = −2λ/3; pero comox2 − y2 = 1 x2 = 1 =⇒ x = ±1 y tenemos los puntos (1, 0) y (−1, 0).
- Si x = 0, y 6= 0, entonces y2 = −1 que es imposible.
- Si x = y = 0, entonces 0 = 1, tambien imposible.
Luego los puntos estacionarios son los dos citados P1 = (1, 0) y P2 = (−1, 0).Como el conjuntoM no es compacto (no es acotado), no podemos asegurar laexistencia de extremos. Lo unico que sabemos es que si f |M tiene extremos,se han de encontrar entre dichos puntos estacionarios. Aplicaremos el criteriode la segunda derivada a la funcion f donde suponemos que la restriccionM permite definir la variable x como funcion implıcita de la variable y (locual es valido segun el teorema de la funcion implıcita en cada uno de lospuntos estacionarios P1 y P2).
De la ecuacion x2 − y2 = 1, deducimos que x′(y) =y
x. Por lo tanto,
f ′(y) = 3x2 · x′(y) + 3y2 = 3xy + 3y2
f ′′(y) = 3x+ 3x′(y) · y + 6y = 3x+3y2
x+ 6y.
Sustituyendo en los puntos estacionarios, resulta
f ′′(P1) = 3 > 0 y f ′′(P2) = −3 < 0
de modo que la funcion alcanza un mınimo relativo en el punto P1 = (1, 0)y un maximo relativo en el punto P2 = (−1, 0).
En la figura se observa que el maximo relativo de la funcion es menor queel mınimo relativo y que la funcion no tiene maximo ni mınimo absolutos.
288

PROBLEMA 4.83
Determinar los maximos y mınimos de la funcion z = x2 + y2 bajola condicion 13x2 − 10xy + 13y2 − 72 = 0.
Solucion
La condicion 13x2 − 10xy + 13y2 − 72 = 0 permite suponer que la va-riable y puede expresarse como funcion implıcita de x, como consecuen-cia del teorema de la funcion implıcita. En efecto, la funcion F (x, y) =13x2 − 10xy + 13y2 − 72 es de clase C(1) en R2 y
∂F
∂y= −10x+ 26y 6= 0 si x 6= 13y
5.
Sabemos ademas que, bajo esas condiciones,
y′(x) = −∂F/∂x∂F/∂y
=13x− 5y5x− 13y
.
Lo anterior permite expresar la funcion z = x2 + y2 como funcion de unavariable. Tenemos entonces al derivar que:
z′(x) = 2x+ 2y · y′(x) =10x2 − 10y2
5x− 13ysi x 6= 13y
5.
Para obtener los puntos crıticos, hacemos z′(x) = 0 y resulta x = ±y (conla condicion 5x − 13y 6= 0 la cual efectivamente se cumple). Al sustituir enla ecuacion que liga ambas variables, obtenemos los cuatro puntos(√
2,−√
2),(−√
2,√
2),(3√
2/2, 3√
2/2),(−3√
2/2,−3√
2/2),
que son los unicos en donde puede haber maximos o mınimos locales.
Para determinarlos, calculamos la derivada segunda
z′′(x) =
(20x− 20y · y′(x)
)(5x− 13y)− (10x2 − 10y2)
(5− 13y′(x)
)(5x− 13y)2
la cual, al sustituirla en los puntos crıticos, da los siguientes resultados:
punto (3√
2/2, 3√
2/2) (−3√
2/2,−3√
2/2) (√
2,−√
2) (−√
2,√
2)
y′(x) −1 −1 1 1
z′′(x) −5 −5 20/9 20/9
289

Esto quiere decir que, en los puntos (3√
2/2, 3√
2/2) y (−3√
2/2,−3√
2/2),la funcion alcanza el maximo y, en los puntos (
√2,−√
2) y (−√
2,√
2), tieneun mınimo relativo.
En la figura adjunta se da una interpretacion geometrica del resultado ob-tenido. La funcion dada representa el cuadrado de la distancia al origen deun punto de la elipse. Como la elipse esta centrada en el origen, los pun-tos que estan mas alejados y mas proximos al origen son los vertices de laelipse.
PROBLEMA 4.84
Sea f(x, y) = xm + ym (m ∈ N). Estudiar los extremos de estafuncion si las variables estan ligadas por la condicion x + y = 2.
Solucion
Debido a que M = {(x, y) ∈ R2 : x+ y = 2} es claramente una variedad 1-dimensional, podemos aplicar el metodo de los multiplicadores de Lagrange.Consideraremos entonces la funcion
g(x, y, λ) = f(x, y) + λ(x+ y − 2)
y distinguiremos dos casos:
i) Si m = 1, entonces f(x, y) = x + y = 2 es una funcion constante, demodo que coinciden sus valores maximo y mınimo.
290
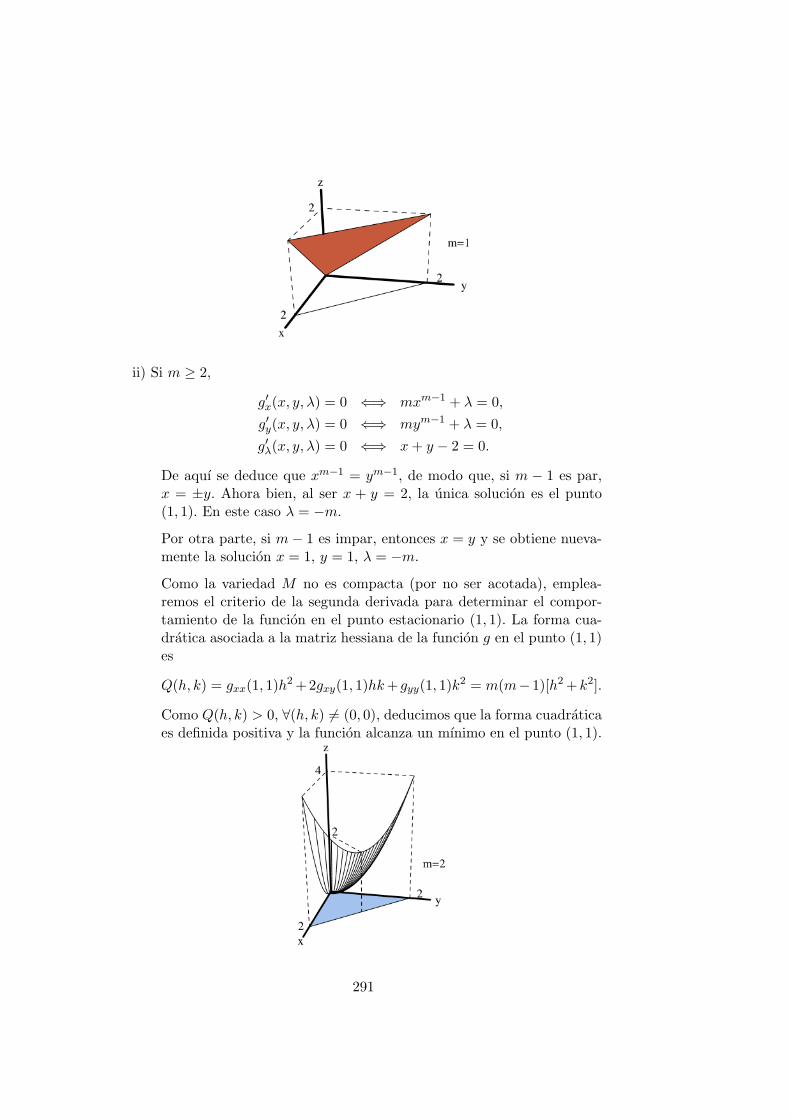
ii) Si m ≥ 2,
g′x(x, y, λ) = 0 ⇐⇒ mxm−1 + λ = 0,g′y(x, y, λ) = 0 ⇐⇒ mym−1 + λ = 0,g′λ(x, y, λ) = 0 ⇐⇒ x+ y − 2 = 0.
De aquı se deduce que xm−1 = ym−1, de modo que, si m − 1 es par,x = ±y. Ahora bien, al ser x + y = 2, la unica solucion es el punto(1, 1). En este caso λ = −m.
Por otra parte, si m− 1 es impar, entonces x = y y se obtiene nueva-mente la solucion x = 1, y = 1, λ = −m.
Como la variedad M no es compacta (por no ser acotada), emplea-remos el criterio de la segunda derivada para determinar el compor-tamiento de la funcion en el punto estacionario (1, 1). La forma cua-dratica asociada a la matriz hessiana de la funcion g en el punto (1, 1)es
Q(h, k) = gxx(1, 1)h2 +2gxy(1, 1)hk+ gyy(1, 1)k2 = m(m−1)[h2 +k2].
Como Q(h, k) > 0, ∀(h, k) 6= (0, 0), deducimos que la forma cuadraticaes definida positiva y la funcion alcanza un mınimo en el punto (1, 1).
291

PROBLEMA 4.85
Sea f(x, y, z) = x− y + 2z. Encontrar los maximos y mınimos de fen el elipsoide M = {(x, y, z) : x2 + y2 + 2z2 = 2}.
Solucion
Llamamos F (x, y, z) = 2− (x2 + y2 + 2z2) y g = f + λF . Igualando a cerolas derivadas parciales de g, obtenemos el sistema de ecuaciones
1− 2λx = 0,−1− 2λy = 0,
2− 4λz = 0,2− (x2 + y2 + 2z2) = 0.
De dicho sistema se obtienen las soluciones λ = ±√
2/2, x = ±√
2/2, y =∓√
2/2, z = ±√
2/2. Puesto que f es continua yM es un conjunto compacto,f alcanza los valores maximo y mınimo en M , los cuales deben ser alguno delos puntos estacionarios. Ahora bien, como f(
√2/2,−
√2/2,√
2/2) = 2√
2y f(−
√2/2,√
2/2,−√
2/2) = −2√
2, estos valores son respectivamente elmaximo y el mınimo de la funcion.
292

PROBLEMA 4.86
Hallar los extremos de la funcion f(x, y, z) = x2 + y2 + z2 sujeta ala condicion
x2/a2 + y2/b2 + z2/c2 = 1,
siendo a, b y c constantes no nulas y distintas.
Solucion
Veamos en primer lugar que el conjunto
M = {(x, y, z) ∈ R3 : x2/a2 + y2/b2 + z2/c2 = 1}
es una variedad.
Para ello, definimos el abierto U = R3 \ {(0, 0, 0)} y la funcion F : U → Rdefinida por F (x, y, z) = x2/a2 + y2/b2 + z2/c2 − 1.
Es claro que F ∈ C(∞)(U) (por tratarse de un polinomio). Ademas,
JF (x, y, z) =(
2xa2,2yb2,2zc2
)y rang JF (x, y, z) = 1 si (x, y, z) ∈ U .
Podemos pues aplicar el teorema de los multiplicadores de Lagrange y ase-gurar que los extremos de f se encuentran entre los puntos estacionarios dela funcion g = f + λF .
Para encontrar estos puntos, debemos resolver el sistema
2x(1 +
λ
a2
)= 0
2y(1 +
λ
b2
)= 0
2z(1 +
λ
c2
)= 0
x2
a2+y2
b2+z2
c2= 1,
para el cual obtenemos el siguiente conjunto de soluciones:
i) Si x = ±a, entonces y = z = 0, λ = −a2;
ii) Si y = ±b, entonces x = z = 0, λ = −b2;
293

iii) Si z = ±c, entonces x = y = 0, λ = −c2.
Como el conjunto M es compacto (pues se trata de un elipsoide de semiejesa, b y c) y la funcion f es continua, el teorema de Weierstrass asegura que sealcanzan los valores maximo y mınimo. Para determinarlos, debemos com-parar los valores de la funcion en los puntos estacionarios obtenidos.
Ahora bien, debido a que
f(±a, 0, 0) = a2, f(0,±b, 0) = b2, f(0, 0,±c) = c2,
el maximo de la funcion vale max{a2, b2, c2} y el mınimo es mın{a2, b2, c2}.
Observacion. La funcion dada representa el cuadrado de la distancia de unpunto (x, y, z) al origen y la restriccion representa un elipsoide de semiejesa, b y c y centrado en el origen. Es evidente entonces que las distanciasmaxima y mınima de un punto del elipsoide al origen son las obtenidasanalıticamente.
PROBLEMA 4.87
Calcular los maximos y mınimos de la funcion
u(x, y, z) = x2 + y2 + z2
sometida a las restricciones x− y = 2z y x+ y + z = 1.
Solucion
Utilizaremos el metodo de los multiplicadores de Lagrange, para lo cualconsideramos el conjunto
M = {(x, y, z) ∈ R3 : x− y − 2z = 0, x+ y + z − 1 = 0}.
Se comprueba facilmente que M es una 2-variedad, pues basta definir lafuncion F : R3 → R2 por
F (x, y, z) = (x− y − 2z, x+ y + z − 1)
y comprobar que F ∈ C(∞)(R3), rang JF (x, y, z) = 2, ∀(x, y, z) ∈ R3 yM = {(x, y, z) ∈ R3 : F (x, y, z) = 0}.
Si definimos la funcion
g(x, y, z) = x2 + y2 + z2 + λ(x− y − 2z) + µ(x+ y + z − 1),
294

sabemos que, si la funcion u tiene algun extremo relativo, este debe sersolucion del sistema
2x+ λ+ µ = 0,2y − λ+ µ = 0,
2z − 2λ+ µ = 0,x− y − 2z = 0,
x+ y + z − 1 = 0.
La unica solucion de este sistema es el punto (4/7, 2/7, 1/7).
Debido a que las restricciones que forman el conjunto M definen a x e ycomo funciones implıcitas de z, podemos considerar a u como funcion de launica variable z,
u(z) = [x(z)]2 + [y(z)]2 + z2.
Si derivamos la funcion implıcita x− y− 2z = 0, x+ y+ z− 1 = 0 respectoa z, obtenemos:
x′(z)− y′(z)− 2 = 0x′(z) + y′(z) + 1 = 0
}=⇒ x′(z) =
12, y′(z) = −3
2.
Con estos valores, aplicamos el criterio de la derivada segunda a la funcionu para comprobar si el punto estacionario (4/7, 2/7, 1/7) corresponde a unmaximo o un mınimo. Resulta entonces:
u′(z) = 2x(z) · x′(z) + 2y(z) · y′(z) + 2z = x(z)− 3y(z) + 2zu′′(z) = x′(z)− 3y′(z) + 2 = 7 =⇒ u′′(1/7) = 7 > 0,
lo que significa que la funcion u alcanza su valor mınimo en el punto (4/7, 2/7, 1/7).
Podemos interpretar geometricamente el problema observando que la fun-cion u representa la distancia de un punto al origen y las restricciones Mrepresentan los puntos de la recta interseccion de los planos dados. Ası pues,se trata de encontrar los puntos de una recta cuya distancia al origen seamaxima (los cuales logicamente no existen) y mınima. Esta interpretacionconcuerda con el resultado analıtico obtenido.
PROBLEMA 4.88
Determinar los extremos relativos de la funcion f(x, y, z) = xaybzc
(a, b, c > 0) bajo la condicion x+ y + z = 1.
Solucion
295

Debido a la forma exponencial de la funcion, deben ser x, y, z > 0, y, al serel logaritmo una funcion creciente, los extremos relativos de f coinciden conlos extremos relativos de g(x, y, z) = a lnx+ b ln y + c ln z.
Es facil comprobar que se verifica el teorema de los multiplicadores de La-grange, de modo que, para determinar los puntos estacionarios, debemosresolver el sistema
a/x+ λ = 0b/y + λ = 0c/z + λ = 0
x+ y + z = 1.
Este sistema tiene como unica solucion el punto(
a
a+ b+ c,
b
a+ b+ c,
c
a+ b+ c
),
con λ = −(a+ b+ c).
Aplicaremos el criterio de la segunda derivada para determinar la carac-terıstica del punto estacionario obtenido. Para ello consideramos la funcionen terminos de las variables x e y haciendo la sustitucion z = 1− x− y. Deeste modo,
−→∇g(x, y) =
(ax− c
z,b
y− c
z
)Hg(x, y) =
(−a/x2 − c/z2 −c/z2
−c/z2 −b/y2 − c/z2
).
Como detHg( a
a+ b+ c,
b
a+ b+ c
)> 0 y a11 < 0, deducimos que el punto
corresponde a un maximo.
PROBLEMA 4.89
Sean a1, a2, a3, b1, b2, b3 ∈ R constantes tales que b1b3−b22 > 0. Ha-
llar el valor maximo, si existe, de la funcion f(x, y) =a1x
2 + 2a2xy + a3y2
b1x2 + 2b2xy + b3y2.
Solucion
Observemos que f es una funcion homogenea de grado cero, es decir f(tx, ty) =t0f(x, y); esto quiere decir que f toma un valor constante en cualquier rec-ta de la forma y = mx, f(x,mx) = f(1,m), ∀x. El problema planteado
296

sera pues equivalente a determinar la direccion de la recta y = mx en lacual la funcion dada alcanza el valor maximo.
Ahora bien, si suponemos que b1 > 0, entonces b1x2 + 2b2xy + b3y2 = 1
corresponde a la ecuacion de una elipse (pues b1b3 − b22 > 0) que rodea alorigen; esto permite deducir que la direccion deseada vendra unıvocamentedeterminada por un punto de dicha elipse. En resumen, el problema se reducea calcular el maximo de la funcion f(x, y) = a1x
2 + 2a2xy + a3y2 cuyas
variables estan sujetas a la condicion b1x2 + 2b2xy + b3y2 = 1.
Construimos para ello la funcion
g(x, y) = a1x2 + 2a2xy + a3y
2 + λ(b1x2 + 2b2xy + b3y2 − 1)
= (a1 + λb1)x2 + 2(a2 + λb2)xy + (a3 + λb3)y2 − λ.
Al igualar a cero las derivadas parciales de primer orden, se obtiene el sistemade ecuaciones siguiente:
g′x(x, y) = 2(a1 + λb1)x+ 2(a2 + λb2)y = 0g′y(x, y) = 2(a2 + λb2)x+ 2(a3 + λb3)y = 0
b1x2 + 2b2xy + b3y
2 = 1.
Si el determinante
D =∣∣∣∣a1 + λb1 a2 + λb2a2 + λb2 a3 + λb3
∣∣∣∣fuera distinto de cero, tendrıamos la unica solucion x = 0, y = 0 que noesta sobre la elipse. Deducimos pues que D = 0, es decir
(a1 + λb1)(a3 + λb3)− (a2 + λb2)2 = 0.
Esta ecuacion nos da dos valores reales de λ, que denotaremos por λ1 y λ2.Cada uno de ellos proporciona un punto estacionario de la funcion g. Enambos puntos se verifica que:
g(x, y) = a1x2 + 2a2xy + a3y
2 + λ(b1x2 + 2b2xy + b3y2 − 1)
= [(a1 + λb1)x+ (a2 + λb2)y]x+ [(a2 + λb2)x+ (a3 + λb3)y]y − λ= 0 + 0− λ = −λ.
Como la elipse es un conjunto compacto y la funcion f es continua, se alcan-zan los valores maximo y mınimo. Deducimos entonces que max f(x, y) =max{−λ1,−λ2} y mın f(x, y) = mın{−λ1,−λ2}.
Si b1 < 0, se debe considerar analogamente la funcion
g(x, y) = a1x2 + 2a2xy + a3y
2 + λ(b1x2 + 2b2xy + b3y2 + 1)
297

y, razonando de forma completamente analoga, obtenemos que max f(x, y) =max{λ1, λ2} con λ1 y λ2 soluciones de D = 0.
PROBLEMA 4.90
Se considera la funcion f(x, y) = 4x2 + y2 − 4x − 3y. Hallar losextremos relativos de dicha funcion y los extremos absolutos en elconjunto K = {(x, y) ∈ R2 : y ≥ 0, 4x2 + y2 ≤ 4}.
Solucion
Es evidente que K es compacto (pues es cerrado y acotado) y f es continuasobre K; por lo tanto f alcanza los valores maximo y mınimo absolutos.Dichos valores pueden estar en el interior de K o en su frontera; en el primercaso deben corresponder con algun punto estacionario que debe ser maximoo mınimo relativo.
Vamos a calcular en primer lugar dichos puntos estacionarios:
f ′x(x, y) = 8x− 4 = 0⇐⇒ x = 1/2f ′y(x, y) = 2y − 3 = 0⇐⇒ y = 3/2.
Ası pues el unico punto estacionario es (1/2, 3/2), el cual efectivamenteesta en el interior de K pues 3/2 > 0 y 4 · (1/2)2 + (3/2)2 < 4.
El valor de la funcion en dicho punto es f(1/2, 3/2) = −13/4. Observemosque
f(x, y) = 4(x− 1
2)2 +
(y − 3
2)2 − 13
4,
de modo que, geometricamente, el punto representa el vertice del paraboloidede ecuacion z = f(x, y).
298

Supongamos ahora que el maximo o mınimo esta en la frontera de K que sepuede descomponer como M1 ∪M2, donde
M1 = {(x, y) ∈ R2 : 4x2 + y2 = 4, y > 0}M2 = {(x, y) ∈ R2 : y = 0, −1 ≤ x ≤ 1}.
Consideramos la variedad M1 y la funcion
g(x, y, λ) = 4x2 + y2 − 4x− 3y + λ(4x2 + y2 − 4).
Tenemos entonces
g′x(x, y, λ) = 0 ⇐⇒ 8x− 4 + 8xλ = 0,g′y(x, y, λ) = 0 ⇐⇒ 2y − 3 + 2yλ = 0,
g′λ(x, y, λ) = 0 ⇐⇒ 4x2 + y2 − 4 = 0.
Ası pues, si λ 6= −1, entonces x =1
2(1 + λ), y =
32(1 + λ)
, pero de 4x2+y2 =
4 se deduce que
1(1 + λ)2
+9/4
(1 + λ)2= 4⇐⇒ 13 = 16(1 + λ)2 ⇐⇒ λ = ±
√134− 1.
Como y > 0, debe ser λ > −1 con lo que λ = −1 +√
13/4, x = 2/√
13,y = 6/
√13.
El punto obtenido es P = (2/√
13, 6/√
13) y el valor de la funcion en dichopunto es f(2/
√13, 6/
√13) = (4
√13− 26)/
√13.
299
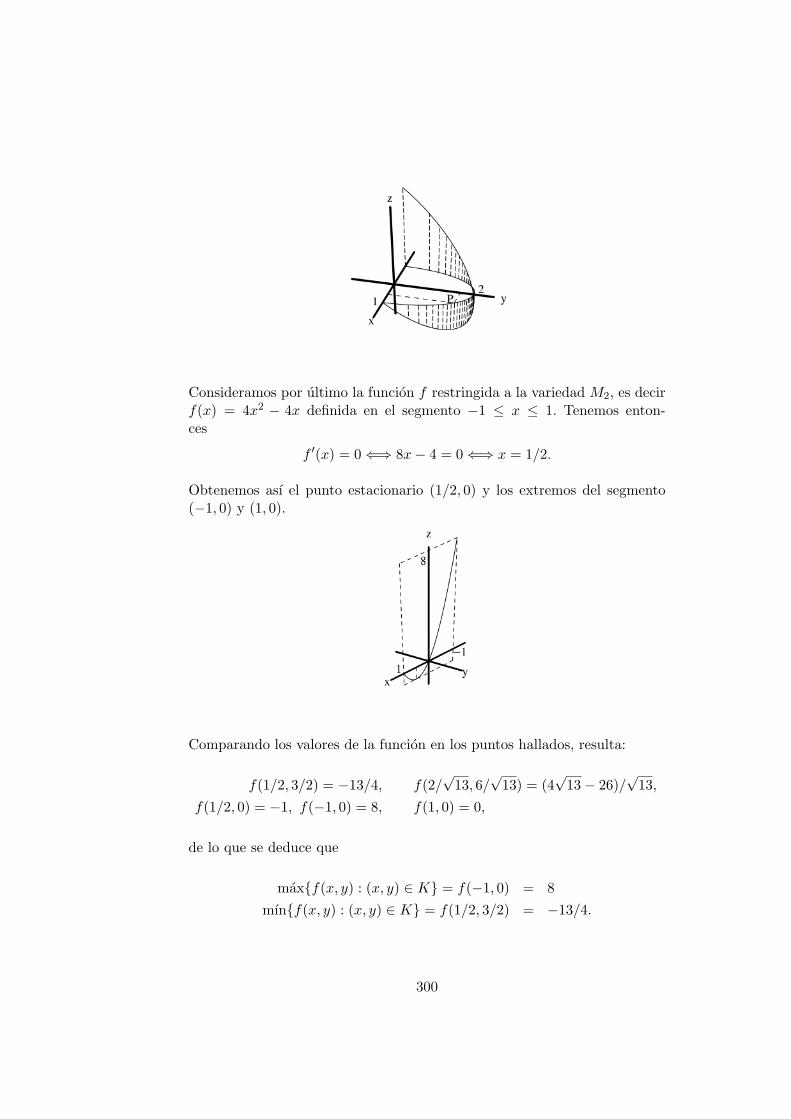
Consideramos por ultimo la funcion f restringida a la variedad M2, es decirf(x) = 4x2 − 4x definida en el segmento −1 ≤ x ≤ 1. Tenemos enton-ces
f ′(x) = 0⇐⇒ 8x− 4 = 0⇐⇒ x = 1/2.
Obtenemos ası el punto estacionario (1/2, 0) y los extremos del segmento(−1, 0) y (1, 0).
Comparando los valores de la funcion en los puntos hallados, resulta:
f(1/2, 3/2) = −13/4, f(2/√
13, 6/√
13) = (4√
13− 26)/√
13,f(1/2, 0) = −1, f(−1, 0) = 8, f(1, 0) = 0,
de lo que se deduce que
max{f(x, y) : (x, y) ∈ K} = f(−1, 0) = 8mın{f(x, y) : (x, y) ∈ K} = f(1/2, 3/2) = −13/4.
300

PROBLEMA 4.91
Hallar el maximo de la funcion f : Rn → R definida por
f(x1, . . . , xn) = (x1 · · · · · xn)2,
con x21 + · · · + x2
n = 1, y demostrar que, si ai > 0, ∀i = 1, . . . , n,
entonces (a1 . . . an)1/n ≤ a1 + · · ·+ an
n.
Solucion
Basta considerar la funcion F : Rn \ {−→0 } → R dada por F (−→x ) = ‖−→x ‖2 − 1para comprobar que el conjunto M = {−→x : x2
1+· · ·+x2n = 1} es una variedad
(n− 1)-dimensional. Esto permite aplicar el teorema de los multiplicadoresde Lagrange. Como ademas M es compacto, pues se trata de la esfera uni-dad de Rn, y f es continua, podemos asegurar que f |M alcanza su maximoabsoluto.
Estudiemos los puntos estacionarios de la funcion
g(x1, . . . , xn) = (x1 · · · · · xn)2 + λ(x21 + · · ·+ x2
n − 1) :
Dig(−→x ) = 0⇐⇒ 2(x1 · · · · · xn)2 · 1xi
+ 2λxi = 0, i = 1, . . . , n
x21 + · · ·+ x2
n = 1.
[Hemos supuesto que xi 6= 0, (∀i) pues, si algun xi es cero, la funcion se anulaen dicho punto pero, por definicion es siempre mayor o igual a cero. Estosignifica que el punto en cuestion corresponde a un mınimo absoluto.]
Para resolver el sistema, distinguimos los siguientes casos:
- Si λ = 0 =⇒ (x1 · · · · · xn)2 = 0 =⇒ ∃j : xj = 0 lo que contradice nuestraanterior suposicion.
- Si λ 6= 0 =⇒ x2i = x2
j , ∀i, j =⇒ nx21 = 1 =⇒ x2
1 = 1/n. En este casof(−→x ) = (1/n) · · · · · (1/n) = n−n.
Deducimos entonces que la funcion f |M alcanza el maximo absoluto en cadauno de los puntos (±1/
√n, . . . ,±1/
√n).
Hemos probado ası que f(−→x ) = (x1 · · · · · xn)2 ≤ 1/nn, ∀−→x ∈ M . Haciendo
en particular xi =√ai√
a1 + · · ·+ an, i = 1, . . . , n, tenemos x2
1 + · · · + x2n = 1
301

y ( √a1√∑ai
· · · · ·√an√∑ai
)2
≤ 1nn.
Operando en esta desigualdad se obtiene la desigualdad propuesta
n√a1 . . . an ≤
a1 + . . . an
n.
PROBLEMA 4.92
Descomponer un numero positivo “a” en tres sumandos no nega-tivos de modo que sea mınima la suma de sus cubos.
Solucion
Sean x, y y z los tres sumandos en que descomponemos el numero a. De-bemos hacer mınima la cantidad Σ = x3 + y3 + z3, sujeta a la condicionx+ y + z = a, con x ≥ 0, y ≥ 0, z ≥ 0.
Resolveremos el problema de dos maneras:
A) Como z = a − x − y, sustituyendo en Σ, obtenemos la funcion de dosvariables
f(x, y) = x3 + y3 + (a− x− y)3.
Buscamos en primer lugar sus puntos estacionarios resolviendo el sis-tema:
∂f
∂x= 3x2 − 3(a− x− y)2 = 0,
∂f
∂y= 3y2 − 3(a− x− y)2 = 0.
Las unicas soluciones que cumplen las condiciones x ≥ 0, y ≥ 0 sonlos puntos (a/3, a/3) y (a, a). Este ultimo no es valido pues da el valorz = −a < 0.
Las derivadas de segundo orden son
∂2f
∂x2= 6x+6(a−x−y), ∂2f
∂x∂y= 6(a−x−y), ∂
2f
∂y2= 6y+6(a−x−y),
y el hessiano en el punto (a/3, a/3) es
Hf(a/3, a/3) =(
4a 2a2a 4a
).
302

Como detHf(a/3, a/3) = 12a2 > 0 y a11 = 4a > 0, deducimos queel punto corresponde a un mınimo. Sustituyendo en el valor de z =a − x − y = a/3, se deduce que la descomposicion optima es aquellacuyas componentes son iguales.
B) Metodo de los multiplicadores de Lagrange.
Es evidente que la restriccion x + y + z = a verifica las condicionesdel teorema de los multiplicadores de Lagrange. Construimos pues lafuncion auxiliar
g(x, y, z) = x3 + y3 + z3 + λ(x+ y + z − a)
y resolvemos el sistema que se forma igualando a cero sus derivadasparciales de primer orden:
3x2 + λ = 03y2 + λ = 03z2 + λ = 0
x+ y + z = a.
Obtenemos la solucion x = y = z = a/3, λ = −a2/3.
Como se ve, la solucion coincide con la obtenida antes y, para com-probar que la funcion tiene un mınimo en dicho punto, basta aplicarel criterio de las derivadas de segundo orden.
PROBLEMA 4.93
Hallar los puntos de la curva 5(x2 + y2) − 10y − 6xy + 6x − 3 = 0cuya distancia al punto P (0, 1) sea maxima o mınima.
Solucion
En vez de maximizar o minimizar la distancia, lo haremos con el cuadradode la distancia, es decir consideramos la funcion
z(x, y) = d(P,M)2 = x2 + (y − 1)2,
donde M(x, y) es un punto arbitrario de la curva dada. Como la funcion zes continua y definida en un compacto (pues la curva dada es una elipse),alcanzara sus valores maximo y mınimo.
303

Aplicaremos el metodo de los multiplicadores de Lagrange, para lo cualconstruimos la funcion auxiliar
g(x, y) = x2 + (y − 1)2 + λ · [5(x2 + y2)− 10y − 6xy + 6x− 3]
y resolvemos el sistema
∂g
∂x= 0⇐⇒ 2x+ λ(10x− 6y + 6) = 0
∂g
∂y= 0⇐⇒ 2(y − 1) + λ(10y − 10− 6x) = 0
5(x2 + y2)− 10y − 6xy + 6x− 3 = 0.
Este sistema tiene las siguientes soluciones:
x = −√
2, y = 1−√
2, λ = −1/2x =
√2, y = 1 +
√2, λ = −1/2
x =√
2/2, y = 1−√
2/2, λ = −1/8x = −
√2/2, y = 1 +
√2/2, λ = −1/8.
Al sustituir los puntos en la formula de la distancia, deducimos que esta esmaxima en los puntos de la curva (−
√2, 1−
√2) y (
√2, 1+
√2), y es mınima
en los puntos (√
2/2, 1−√
2/2) y (−√
2/2, 1 +√
2/2).
Observamos del resultado obtenido y la grafica adjunta que el punto (0, 1) esprecisamente el centro de la elipse, de modo que los puntos que maximizany minimizan la distancia son precisamente los vertices.
PROBLEMA 4.94
Utilizando los multiplicadores de Lagrange, determinar el rectangu-lo de area maxima y perımetro constante 2k.
304
Solucion
Llamando x e y a los lados del rectangulo, su area es S = x ·y y su perımetro2k = 2x + 2y. Si aplicamos el metodo de los multiplicadores de Lagrange,debemos estudiar la funcion g(x, y) = xy + λ(x+ y − k). El sistema que seobtiene haciendo nulas las primeras derivadas parciales es el siguiente:
y + λ = 0x+ λ = 0
x+ y − k = 0,
que da la solucion x = y = k/2, λ = −k/2. Para ver si el punto (k/2, k/2)corresponde a un maximo o un mınimo, comparamos el valor de g en di-cho punto con el valor de g en cualquier otro punto (x, y) que verifique lacondicion x+ y = k:
g
(k
2,k
2
)− g (x, k − x) =
k2
4− x(k − x) = x2 − kx+
k2
4=(x− k
2
)2
≥ 0.
Esto implica que la funcion alcanza un maximo en el punto (k/2, k/2) y elrectangulo de area maxima es precisamente el cuadrado.
PROBLEMA 4.95
De todos los ortoedros (paralelepıpedos rectangulares rectos) deigual volumen, obtener el de superficie total mınima.
Solucion
Supongamos que el origen de coordenadas es un vertice del ortoedro y elpunto P (x, y, z), con x, y, z > 0, es el vertice opuesto (ver figura).
305

Llamamos k al volumen del ortoedro k = xyz, de modo que el problemapuede plantearse como el de minimizar la funcion S = 2(xy+xz+yz) cuyasvariables estan sujetas a la restriccion xyz = k. Utilizamos nuevamente elmetodo de los multiplicadores de Lagrange con la funcion
g(x, y, z) = 2(xy + xz + yz) + λ(xyz − k).
Al resolver el sistema
2(y + z) + λyz = 0,2(x+ z) + λxz = 0,2(x+ y) + λxy = 0,
xyz − k = 0,
obtenemos la solucion x = y = z = 3√k (basta observar la simetrıa de este
sistema de ecuaciones).
Como el conjunto M = {(x, y, z) ∈ R3 : x > 0, y > 0, z > 0} no es compac-to, no esta garantizada la existencia de maximo ni mınimo de la funcion.Ası pues, si despejamos el valor de z en la formula del volumen, z = k/(xy),y lo sustituimos en la funcion a minimizar, podemos aplicar el criterio delas derivadas de segundo orden a la funcion de dos variables
f(x, y) = 2(xy +
k
y+k
x
).
Obtenemos ası el hessiano
Hf(x, y) =(
4k/x3 22 4k/y3
)=⇒ Hf( 3
√k,
3√k) =
(4 22 4
).
Como detHf( 3√k, 3√k) = 12 y a11 = 4 > 0, el ortoedro de superficie mınima
es precisamente el cubo de dimensiones x = y = z = 3√k.
PROBLEMA 4.96
Sea γ la curva interseccion del cono z2 = x2 + y2 con el planoz = 1+x+y. Encontrar los puntos de γ que estan mas cerca y maslejos del origen.
Solucion
El problema equivale a maximizar o minimizar el cuadrado de la distancia deun punto de la curva al origen. Ası pues, debemos determinar los maximos y
306

mınimos de la funcion u = x2+y2+z2 sujeta a las restricciones z2−x2−y2 =0, z − x− y − 1 = 0.
En primer lugar debemos comprobar que el conjunto
M = {(x, y, z) : z2 − x2 − y2 = 0, z − x− y − 1 = 0}
es una 2-variedad. Para ello, basta definir el abierto U = R3 \ {(x, y, z) : y 6=z} y la funcion F : U → R2 por
F (x, y, z) = (z2 − x2 − y2, z − x− y − 1)
para los que se cumplen las condiciones que definen una variedad.
Sabemos que una condicion necesaria para la existencia de extremos es quetenga solucion el sistema
2x = −2λx− µ2y = −2λy − µ2z = 2λz + µ
z = x+ y + 1z2 = x2 + y2.
Al resolver este sistema, debemos distinguir dos casos:
i) Si x = y, se obtienen los puntos estacionarios
P1 =(−2 +
√2
2,−2 +
√2
2,−1+
√2), P2 =
(−2−√
22
,−2−
√2
2,−1−
√2).
ii) Si x 6= y, debe ser λ = −1 y µ = 0, lo que no da lugar a ningun puntoestacionario.
Tenemos por tanto dos puntos estacionarios; como la curva γ es cerradapero no acotada, no podemos asegurar que se alcancen los valores maximoy mınimo. Para determinar las caracterısticas de los puntos estacionarios,supondremos que las ecuaciones que definen la curva γ permiten expresarlas variables y y z como funciones implıcitas de x (se deja como ejerciciola comprobacion de las hipotesis del teorema de la funcion implıcita). Estopermite suponer u como funcion de la unica variable x y poder aplicar elcriterio de la derivada segunda.
Tenemos ası:
u′(x) = 2x+ 2y · y′ + 2z · z′
u′′(x) = 2 + 2(y′)2 + 2y · y′′ + 2(z′)2 + 2z · z′′.
307

Al derivar con respecto a x en las ecuaciones z2−x2−y2 = 0 y z−x−y−1 = 0,obtenemos:
2z · z′ − 2x− 2y · y′ = 0z′ − 1− y′ = 0
}=⇒
{y′ = z−x
y−z
z′ = y−xy−z .
}
y′′ =(z′ − 1)(y − z)− (z − x)(y′ − z′)
(y − z)2
z′′ =(y′ − 1)(y − z)− (y − x)(y′ − z′)
(y − z)2.
Aplicando estos resultados en los puntos estacionarios obtenidos y susti-tuyendolos en la derivada segunda de u, resulta:
u′′(P1) = 16− 8√
2 > 0, u′′(P2) = 16 + 8√
2 > 0,
lo que significa que ambos puntos corresponden a mınimos relativos de lafuncion. Para determinar el mınimo absoluto, basta calcular el valor de lafuncion en dichos puntos. Como
u(P1) = 6− 4√
2, u(P2) = 6 + 4√
2,
concluimos que la distancia mınima se alcanza en el punto P1 =(−2 +
√2
2,−2 +
√2
2,−1 +
√2)
y no hay ningun punto de la curva cuya distancia al origen sea maxima (loque era de esperar al saber que la curva no esta acotada).
308

PROBLEMA 4.97
En un campo de fuerzas, la componente segun el eje X de la re-sultante aplicada a un cuerpo situado en (x, y) es
F (x, y) = x2 + 36x+ 2− (x− 2y)2,
donde x e y son las coordenadas del punto. Si un cuerpo se hade mover sobre la recta x + y = 1, calcular el punto en que lacomponente de la fuerza sea mınima, dentro del cırculo x2+y2 ≤ 3.
Solucion
Consideramos la funcion
g(x, y) = x2 + 36x+ 2− (x− 2y)2 + λ(x+ y − 1),
y resolvemos el sistema que se obtiene al anular las derivadas de primerorden, unidas a la condicion de ligadura x+ y = 1:
2x+ 36− 2(x− 2y) + λ = 0,4(x− 2y) + λ = 0,
x+ y − 1 = 0.
La unica solucion del sistema es el punto x = 3, y = −2 y corresponde alvalor λ = −28.
Como el conjunto M = {(x, y) ∈ R2 : x+y−1 = 0, x2+y2 ≤ 3} es compacto(se trata del segmento AB de la figura) y la funcion F es continua, alcanzael valor mınimo. El punto estacionario (3,−2) no pertenece al segmento AB,de modo que el mınimo solo puede alcanzarse en alguno de los extremos Ao B.
309
Dichos puntos tienen coordenadas
A =
(1−√
52
,1 +√
52
), B =
(1 +√
52
,1−√
52
).
Como F (A) = −20√
5 + 10 y F (B) = 20√
5 + 10, deducimos que el valor
mınimo de la fuerza se alcanza en el punto A =
(1−√
52
,1 +√
52
).
310

PROBLEMAS PROPUESTOS.
1.- La funcion z = h(x) se obtiene eliminando la variable y entre las
ecuacionesz = f(x, y)0 = g(x, y)
}. Expresar h′(x) en funcion de las derivadas
de f y g.
2.- Dada la funcion f(x, y) = exy + x + y, comprobar que la ecuacionf(x, y) = 0 define implıcitamente una funcion y = g(x) en un entornode (0,−1). Calcular g′(0).
3.- ¿Para que valores de a la ecuacion (x − a)(x − y) = 0 define im-plıcitamente una funcion y = g(x) en un entorno de (2, 2)?
4.- ¿Cerca de que puntos, la superficie
x3 + 3y2 + 8xz2 − 3yz3 = 1
se puede representar como funcion implıcita diferenciable z = f(x, y)?
5.- Sabiendo que la ecuacion xy + z + 3xz5 = 4 representa de formaimplıcita una funcion z = g(x, y) en un entorno del punto (1, 0, 1),
calcular∂g
∂x(1, 0) y
∂g
∂y(1, 0).
6.- Sea f(x, y, z) = 0. Probar que∂x
∂y· ∂y∂z· ∂z∂x
= −1, bajo suposiciones
adecuadas.
7.- Estudiar si la ecuacion
x2 + xy + y2 + z2 + z = 5
define a z como funcion implıcita de x e y en un entorno del punto
P = (1, 1, 1). En caso afirmativo, hallar∂z
∂x(P ) y
∂2z
∂x∂y(P ).
8.- Si F (x, y, z) = 0 define la funcion z = g(x, y), calcular∂2g
∂x2.
311

9.- La ecuacion sen(x+ y) + sen(y + z) = 1 define z = f(x, y). Calcular∂2f
∂x∂yen funcion de x, y, z.
10.- Calcular∂2z
∂y∂xsi z = z(x, y) viene definida implıcitamente por la
ecuacion x+ 2y + z + ex+y+z = 0.
11.- Dada la funcion f(x, y, z) = (x3 + y3 + 3x2y − 3z, x − y + z3 + 1)y el punto P = (−1, 1, 1), probar que f(x, y, z) = 0 define una funciong(x) =
(g1(x), g2(x)
)en un entorno de P y calcular g′(x).
12.- Se considera la funcion f(x, y, z, u, v) = (4x+ yv− eu, y− 2z+ 3v−u cos v) y el punto P = (1,−3, 0, 0, 1).
Probar que f(x, y, z, u, v) = (0, 0) permite definir una funcion g(x, y, z) =(g1(x, y, z), g2(x, y, z)
)en un entorno de P y calcular
∂g
∂x,∂g
∂y,∂g
∂z.
13.- Las ecuaciones x = u+ v, y = uv2 definen implıcitamente v como
funcion de x e y, eliminando la variable u. Probar que∂v
∂x=
v(x, y)3v(x, y)− 2x
,
y encontrar una formula analoga para∂v
∂y.
14.- Las ecuaciones x+y = uv, xy = u−v, definen x e y como funcionesimplıcitas de u y v, por ejemplo, x = X(u, v), y = Y (u, v). Probar que∂X
∂u=xv − 1x− y
, si x 6= y, y hallar formulas similares para∂X
∂v,∂Y
∂u,
∂Y
∂v.
15.- Las ecuaciones
x2 − y cos(uv) + z2 = 0x2 + y2 − sen(uv) + 2z2 = 2
xy − senu cos v + z = 0
definen x, y, z como funciones de u, v. Calcular∂x
∂u,∂x
∂ven el punto
x = 1, y = 1, u = π/2, v = 0, z = 0.
16.- Calcular la recta tangente a la curva definida en forma implıcitapor la ecuacion x3 + y3 − 2xy + x− y − 2 = 0 en el punto (1, 0).
312

17.- Hallar el plano tangente a la superficie z = g(x, y) definida im-
plıcitamente por la ecuacion 3ex − y +√x2 + z2
y −√x2 + z2
= 0 en el punto P =
(0, 2, 1).
18.- Sea f : R2 → R la funcion definida por f(x, y) = y cosx. Probar quef(x, y) = 0 define una funcion implıcita diferenciable y = h(x) en unentorno de (0, 0). Hallar h′(0). ¿Posee h funcion inversa diferenciableen un entorno del origen?
19.- Sea g : R2 → R2 la funcion definida por
g(x, y) = (chx cos y, shx sen y).
Probar que g posee inversa diferenciable en un entorno de cada puntode R2 distinto del origen. ¿Posee g una unica inversa?
20.- Cambiar en la ecuacion diferenciald2y
dx2(x2 +m2) +
dy
dx· x = 0 la
variable independiente por v, definida mediante la relacion x = m sh v.
21.- Transformar la ecuacion (x2 + y2)d2y
dx2+ 2
(1 +
(dy
dx
)2)(
y − xdydx
)= 0
mediante el cambio x = ρ cosϑ, y = ρ senϑ, siendo ρ = ρ(ϑ).
22.- Sea V = x2 ∂2z
∂y2− 2xy
∂2z
∂x∂y+ y2 ∂
2z
∂x2. Escribir esta ecuacion con
respecto a las nuevas variables (u, v), definidas por x = aeu cos v, y =aeu sen v.
23.- Escribir en coordenadas cilındricas la expresion H =(∂2z
∂x∂y
)2
− ∂2z
∂x2· ∂
2z
∂y2.
24.- Transformar la ecuacion x2 ∂z
∂x+ y2 ∂z
∂y= z2, tomando como nue-
vas variables independientes u = x, v = 1/y−1/x y como nueva funcionw = 1/z − 1/x.
25.- En la expresion H =∂2z
∂x2− ∂2z
∂y2, hacer el cambio x = u · ch t, y =
u · sh t.
313

26.- Tomando u y v por nuevas variables independientes, transformarla ecuacion
∂2z
∂x2− y ∂
2z
∂y2=
12· ∂z∂y, y > 0,
si u = x− 2√y, v = x+ 2
√y.
27.- Tomando u y v por nuevas variables independientes y w = w(u, v)por una nueva funcion, transformar la ecuacion
z · ∂2z
∂x2+ z · ∂
2z
∂y2+(∂z
∂x
)2
+(∂z
∂y
)2
= 0,
siendo u = x2 − y2, v = x2 + y2, w = z2.
28.- Transformar la ecuacion xyz(z − x ∂z
∂x− y ∂z
∂y
)3=∂z
∂x· ∂z∂y
, hacien-
do el cambio de variables x2 = u, y2 = v, z2 = w.
29.- En la ecuacion en derivadas paricales1x2
(∂z∂x
)2+
1y2
(∂z∂y
)2= ez,
hacer el cambio u = x2 + y2, v = x2 − y2, w = 2ez.
30.- ¿Existen a, b reales y distintos tales que el cambio de variables{u = y + axv = y + bx
transforme la ecuacion
4∂2f
∂x2+ 5
∂2f
∂x∂y+∂2f
∂y2= 0
en∂2f
∂u∂v= 0?
31.- Calcular los extremos relativos de las siguientes funciones:
(a) f(x, y) = xy2(3− x− y).
(b) f(x, y) = xy +1x
+8y.
32.- Hallar y clasificar los extremos relativos de las siguientes funcio-nes:
(a) f(x, y) = e−x2−y2−x.
(b) f(x, y) = xye−x2−y2.
314
(c) f(x, y) = (x2 + 3y2)e−x2−y2.
33.- Hallar y clasificar los puntos estacionarios de las funciones
(a) f(x, y) = xy ln(x2 + y2).
(b) f(x, y) = x2 − 2y3 − ln(x2 + y2).
34.- Hallar los extremos de f en las regiones dadas:
(a) f(x, y) = x2 + y2, M = {(x, y) ∈ R2 : y ≥ 2}.
(b) f(x, y) = x2 + y2, M = {(x, y) ∈ R2 : y ≥ 2 + x2}.
(c) f(x, y) = xy, M = {(x, y) ∈ R2 : −1 ≤ x ≤ 1, −1 ≤ y ≤ 1}.
35.- Hallar los maximos y mınimos de la funcion f(x, y) = x2 +y2 bajola condicion y + x2 = 1.
36.- Encontrar el maximo valor de u = xy2z3 si x, y, z son numerosreales positivos tales que x+ y + z = 12.
37.- Hallar los valores extremos de la funcion f(x, y, z) = x − 2y + 2zen la esfera x2 + y2 + z2 = 1.
38.- Encontrar los valores extremos de la funcion f(x, y) = (x − y)n
bajo la restriccion x2 + y2 = 1.
39.- Hallar los puntos de la interseccion del plano x + y + z = 0 conla esfera x2 + y2 + z2 = 1 tales que el producto de sus coordenadas seamaximo o mınimo.
40.- Hallar el punto del plano 2x − y + 2z = 3 mas proximo al ori-gen.
41.- Hallar el punto de la superficie z = xy − 1 que este mas proximoal origen de coordenadas.
42.- Hallar los puntos de la curva interseccion de las superficies x2 −xy + y2 − z2 = 1, x2 + y2 = 1, mas proximos al origen.
43.- Hallar las dimensiones que maximicen el volumen de una cajarectangular sin tapa de area 16m2.
315
44.- Hallar los ejes de la elipse 5x2 + 8xy + 5y2 = 9, sabiendo queesta centrada en el origen.
45.- Calcular la distancia al origen de la recta de ecuacion{2x+ 2y + z + 9 = 0
2x− y − 2z − 18 = 0.
46.- Hallar los puntos de la esfera x2 +y2 +z2 = 9 que estan mas cercay mas lejos, respectivamente, del punto M(2, 3, 4).
47.- Hallar los puntos de la curva dada por la interseccion de lassuperficies x2 + y2 = 4 y 6x + 3y + 2z = 6, que esten mas proximos ymas alejados del origen.
48.- Hallar el volumen del mayor paralelepıpedo rectangular inscritoen el elipsoide de semiejes a, b y c.
49.- Sea C la parte de arco de curva interseccion del paraboloide 2z =16 − x2 − y2 con el plano x + y = 4 que se encuentra en el primeroctante. Hallar los puntos de C mas cercanos y mas lejanos al origen.Calcular las distancias mınima y maxima de C al origen.
50.- Un espejo rectangular OABC, de lados a y c, se ha partido poruna de sus esquinas, digamos O, de manera que el trozo OMN es untriangulo rectangulo, de base m y altura n. Aprovechando el fragmentoMABCNM , encontrar un punto P , sobre MN , de tal manera que elnuevo espejo rectangular PLBH tenga area maxima.
51.- (a) Estudiar los extremos de la funcion f(x, y, z) = lnx+ln y+3 ln zsobre la porcion de esfera x2 + y2 + z2 = 5r2 en la que x > 0, y > 0,z > 0.
(b) Utilizar el apartado anterior para demostrar que, si a, b, c ∈ R+,entonces
abc3 ≤ 27(a+ b+ c
5
)5
.
52.- (a) Maximizar la funcion f(x, y, z) = a lnx + b ln y + c ln z, dondea, b, c son constantes positivas, sujetas a la condicion xk + yk + zk = 1,con x, y, z ≥ 0 y k > 0.
316
(b) A partir del resultado de (a), deducir la siguiente desigualdad paracualesquiera seis numeros reales positivos a, b, c, u, v, w:
(ua
)a (vb
)b (wc
)c≤(u+ v + w
a+ b+ c
)a+b+c
.
53.- (a) Hallar los extremos de la funcion f(x, y) = x3+3xy2−15x−12ycuando (x, y) ∈ R2.
(b) Desarrollar la funcion anterior en serie de Taylor de segundoorden alrededor del punto (1, 1).
54.- Probar que xyz + sen(z − 6)− 2(x+ y + x2y2) = 0 define a z comofuncion implıcita de x e y, z = f(x, y), en un entorno del punto (1, 1, 6).¿Es (1, 1) punto extremo de f(x, y)?
55.- Sea la funcion f(x, y, z) = x2 + y3 + xz + xy + az.
(a) ¿Para que valores de a la funcion f(x, y, z) = 0 define a z comofuncion implıcita de x e y (z = h(x, y)) en un entorno del origen?
(b) ¿Para que valores de a la funcion z = h(x, y) tiene un extremo enel punto (0, 0)?
56.- (a) Calcular los extremos de la funcion f(x, y) = 2x4 + y4 − 2x2 −2y2.
(b) Si consideramos la ecuacion f(x, y) = 0, ¿es posible expresar x
como funcion implıcita de y en un entorno del punto P =(√
1+√
32 , 1
)?
En caso afirmativo, calcular la derivada de dicha funcion.
57.- Se considera la funcion f(x, y) = (2 + xy)(x+ 2y).
(a) Determinar los extremos relativos de f .
(b) Comprobar si alguna de las siguientes identidades es cierta:
i) x∂f
∂x(x, y) + y
∂f
∂y(x, y) = 4 f(x, y).
ii) x2 ∂2f
∂x2(x, y) + y2 ∂
2f
∂y2(x, y) +
∂2f
∂x∂y(x, y) +
∂2f
∂y∂x(x, y) = 2 f(x, y).
iii) y∂3f
∂x3(x, y)− x ∂
3f
∂y3(x, y) = 0.
317
58.- Se considera la funcion f(x, y) = x4 + y4 − 4xy.
(a) Determinar los extremos relativos de f .
(b) Comprobar si alguna de las siguientes identidades es cierta:
i) x∂f
∂x(x, y) + y
∂f
∂y(x, y) = 4 f(x, y).
ii) x2 ∂2f
∂x2(x, y) + y2 ∂
2f
∂y2(x, y) + 12
∂2f
∂x∂y(x, y) = 12 f(x, y).
iii) y∂3f
∂x3(x, y)− x ∂
3f
∂y3(x, y) = 0.
318