ch.3. group work units
TRANSCRIPT

Ch.3. Group Work Units
Continuum Mechanics Course (MMC) - ETSECCPB - UPC

Unit 1- Exam question
Given an infinitesimal deformation tensor , which fulfils the compatibility
equations, the corresponding displacement field is determined except for: a A rigid body motion. c Six integration constants. b A rotation and a translation. d Three integration constants
ε

Unit 1 - Solution
( ),tε xThe form of the solution of the first integration is:
θ x,t( ) = !θ x,t( ) +θ! t( )
The form of the solution of the second integration is:
u x,t( ) = !u x,t( ) + u t( )
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪
Where consists in 3 Integration constants.
The train tensor determines the movement in any instant of time except
for a uniform rotation and translation .
The displacement field constructed from these rotation and translation
corresponds in fact to a rigid solid movement:
( ),tε x( )ˆ tθ ( )ˆ tu
( )ˆ tθ
( )ˆ tu ( ) ( )( ) ( )ˆ ˆˆ ˆ,t t t= +u x Ω θ x u
The integration of the strain field is performed two steps:
( )ˆ tθ
Where consists in 3 Integration constants. ( )ˆ tu

Unit 1 - Solution
To summarise, given an infinitesimal deformation tensor, the corresponding
displacement field is determined except for 6 integrations constants, 3 of them
corresponding to a rotation and the other 3 corresponding to a translation. A
rigid solid motion can be constructed, in turn, from these rotation and
translation.
Statements A, B and C are correct while statement D is not.

Unit 1- Exam question
Given an infinitesimal deformation tension , which fulfils the compatibility
equations, the corresponding displacement field is determined except for: a A rigid body motion. c Six integration constants. b A rotation and a translation. d Three integration constants
ε

Unit 2 - Exam question
Given the infinitesimal strain tensor:
And knowing that the displacement field and the infinitesimal rotation vector
nullify at point (0,0,0) for any t and , the components
of the displacement vector verify:
a c
b d
0 01 0
0 0
yy
t
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
ε
u 0,t( )( = 0 θ 0,t( ) = 0)
yu y= 2xu y=
xu y= yu y z= +
Unit 2 - Solution
1
1
1
0 0 0
0 0 0
0 0 0
xyxz
yz yy
yzzz
x y z
y y z
z y z
εθ ε
ε εθ
εθ ε
∂ ⎫∂ ∂= − = − = ⎪∂ ∂ ∂ ⎪⎪∂ ∂∂ = − = − = ⎬∂ ∂ ∂ ⎪⎪∂∂ ∂= − = − = ⎪
∂ ∂ ∂ ⎭
2
2
2
0 0 0
0 0 0
0 0 0
xx xz
xy yz
xz zz
x z x
y z x
z z x
θ ε ε
ε εθ
θ ε ε
∂ ∂ ∂ ⎫= − = − = ⎪∂ ∂ ∂ ⎪∂ ∂∂ ⎪= − = − = ⎬∂ ∂ ∂ ⎪
⎪∂ ∂ ∂= − = − = ⎪∂ ∂ ∂ ⎭
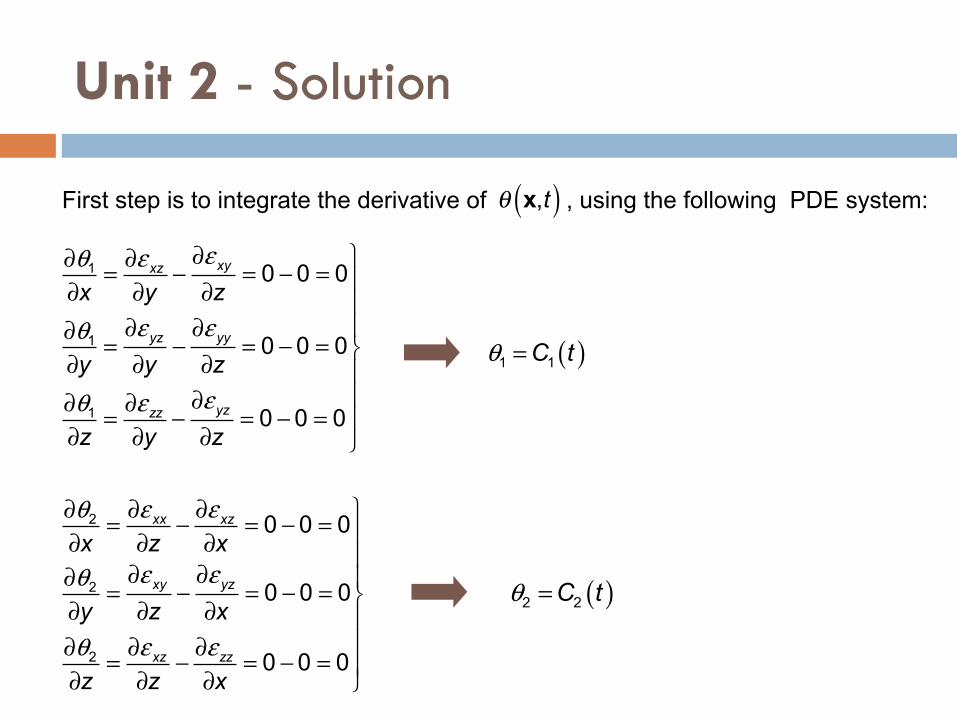
First step is to integrate the derivative of , using the following PDE system:
( )1 1C tθ =
( )2 2C tθ =
θ x,t( )

Unit 2 - Solution
( )3 3y C tθ = − +
Since for any time t the rotation vector is null at point (0,0,0): θ 0,t( ) = 0
θ =
C1 t( )C2 t( )
−y +C3 t( )
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
θ x,t( )x= 0,0,0( )
=
C1
C2
C3
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
=000
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
1 2 3 0C C C= = =
θ =00−y
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
3
3
3
0 0 0
0 1 1
0 0 0
xy xx
yy xy
yz xz
x x y
y x y
z x y
εθ ε
ε εθ
εθ ε
∂ ⎫∂ ∂= − = − = ⎪∂ ∂ ∂ ⎪⎪∂ ∂∂ = − = − = − ⎬∂ ∂ ∂ ⎪⎪∂∂ ∂= − = − = ⎪
∂ ∂ ∂ ⎭

Unit 2 - Solution
Once is known, u is integrated also using a PDE system: θ
1
13
12
0
2
0 0 0
xx
xy
xz
uxu y y yyuz
ε
ε θ
ε θ
⎫∂ = = ⎪∂ ⎪∂ ⎪= − = + = ⎬∂ ⎪
⎪∂ = + = + = ⎪∂ ⎭
( )2 '1 1u y C t= +
23
2
21
0
1
0 0 0
xy
yy
yz
u y yxuyuz
ε θ
ε
ε θ
⎫∂ = + = − = ⎪∂ ⎪∂ ⎪= = ⎬∂ ⎪
⎪∂ = − = − = ⎪∂ ⎭
( )'2 2u y C t= +

Unit 2 - Solution
( )'3 3u zt C t= +
Since for any time t the displacement field is null at point (0,0,0): ( ),t =u 0 0
u =
y 2 +C1' t( )
y +C2' t( )
zt +C3' t( )
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
( ) ( )
'1'20,0,0'3
0, 0
0
Ct C
C=
⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥= =⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥⎣ ⎦⎣ ⎦
xu x ' ' '
1 2 3 0C C C= = =
2yyzt
⎡ ⎤⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦
u
32
31
3
0 0 0
0 0 0
xz
yz
zz
uxuyu tz
ε θ
ε θ
ε
⎫∂ = − = − = ⎪∂ ⎪∂ ⎪= + = + = ⎬∂ ⎪
⎪∂ = = ⎪∂ ⎭

Unit 2 – Exam question
Given the infinitesimal strain tensor:
And knowing that the displacement field and the infinitesimal rotation vector
nullify at point (0,0,0) for any t and , the components
of the displacement vector verify:
a c
b d
0 01 0
0 0
yy
t
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
ε
( )( ,t =u 0 0 ( ) ),t =θ 0 0
yu y= 2xu y=
xu y= yu y z= +

Unit 3
Given the infinitesimal strain tensor: Obtain the displacements field and the rotation vector knowing that: and
ε =
8x − 12
y32
x2z
− 12
y x 0
32
x2z 0 x3
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
( ) ( ) [ ]0,0,0
, 3 0 0 Tt t=
=x
u x θ x,t( )
x= 0,0,0( )= 0 0 0⎡⎣
⎤⎦
T

Unit 3 - Solution
1
1
1
0 0 0
0 0 0
0 0 0
xyxz
yz yy
yzzz
x y z
y y z
z y z
εθ ε
ε εθ
εθ ε
∂ ⎫∂ ∂= − = − = ⎪∂ ∂ ∂ ⎪⎪∂ ∂∂ = − = − = ⎬∂ ∂ ∂ ⎪⎪∂∂ ∂= − = − = ⎪
∂ ∂ ∂ ⎭
( )1 1C tθ =
The derivative of can be integrated using aPDE system: ( ),tθ x
∂θ2
∂x=∂ε xx
∂z−∂ε xz
∂x= 0 − 3xz = −3xz
∂θ2
∂y=∂ε xy
∂z−∂ε yz
∂x= 0 − 0 = 0
∂θ2
∂z=∂ε xz
∂z−∂εzz
∂x= 3
2x2 − 3x2 = − 3
2x2
⎫
⎬
⎪⎪⎪
⎭
⎪⎪⎪
( )22 2
32x z C tθ = − +

Unit 3 - Solution
3
3
3
0 0 0
1 312 2
0 0 0
xy xx
yy xy
yz xz
x x y
y x y
z x y
εθ ε
ε εθ
εθ ε
∂ ⎫∂ ∂= − = − = ⎪∂ ∂ ∂ ⎪⎪∂ ∂∂ = − = + = ⎬∂ ∂ ∂ ⎪⎪∂∂ ∂= − = − = ⎪
∂ ∂ ∂ ⎭
( )3 332y C tθ = +
θ =
C1 t( )− 3
2x2z +C2 t( )
32
y +C3 t( )
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥
Applying the condition:
θ x,t( )
x= 0,0,0( )= 0 0 0⎡⎣
⎤⎦
T
1 2 3 0C C C= = =
θ =
0
− 32
x2z
32
y
⎡
⎣
⎢⎢⎢⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥⎥⎥⎥

Unit 3 - Solution
Is also obtained integrating a PDE system: ( ),tu x
1
13
2 212
8
1 3 22 23 3 02 2
xx
xy
xz
u xxu y y yyu x z x zz
ε
ε θ
ε θ
⎫∂ = = ⎪∂ ⎪∂ ⎪= − = − − = − ⎬∂ ⎪
⎪∂ = + = − = ⎪∂ ⎭
( )2 2 '1 14u x y C t= − +
23
2
21
1 32 2
0 0 0
xy
yy
yz
u y y yxu xyuz
ε θ
ε
ε θ
⎫∂ = + = − + = ⎪∂ ⎪∂ ⎪= = ⎬∂ ⎪
⎪∂ = − = − = ⎪∂ ⎭
( )'2 2u xy C t= +

Unit 3 - Solution
2 2 232
31
33
3 3 32 2
0 0 0
xz
yz
zz
u x z x z x zxuyu xz
ε θ
ε θ
ε
⎫∂ = − = + = ⎪∂ ⎪∂ ⎪= + = + = ⎬∂ ⎪
⎪∂ = = ⎪∂ ⎭
( )3 '3 3u x z C t= +
( )( )( )
2 2 '1
'2
3 '3
4x y C tu xy C t
x z C t
⎡ ⎤− +⎢ ⎥= +⎢ ⎥⎢ ⎥+⎣ ⎦
Applying the condition:
( ) ( ) [ ]0,0,0
, 3 0 0 Tt t=
=x
u x
'1' '2 3
3
0
C t
C C
=
= =
2 2
3
4 3x y tu xy
x z
⎡ ⎤− +⎢ ⎥= ⎢ ⎥⎢ ⎥⎣ ⎦