chap. 2 théorèmes des énergies.doc
TRANSCRIPT
Chapitre 2. Théorèmes des énergies
Chapitre 2.
THEOPREMES DES ENERGIES
1. TRAVAIL DES FORCES
1.1. Généralités
En mécanique, on sait que le travail W effectué par une force constante F sur un déplacement F dans le sens de cette force est égal au produit de cette force par ce déplacement F:
W = F F (2.1)
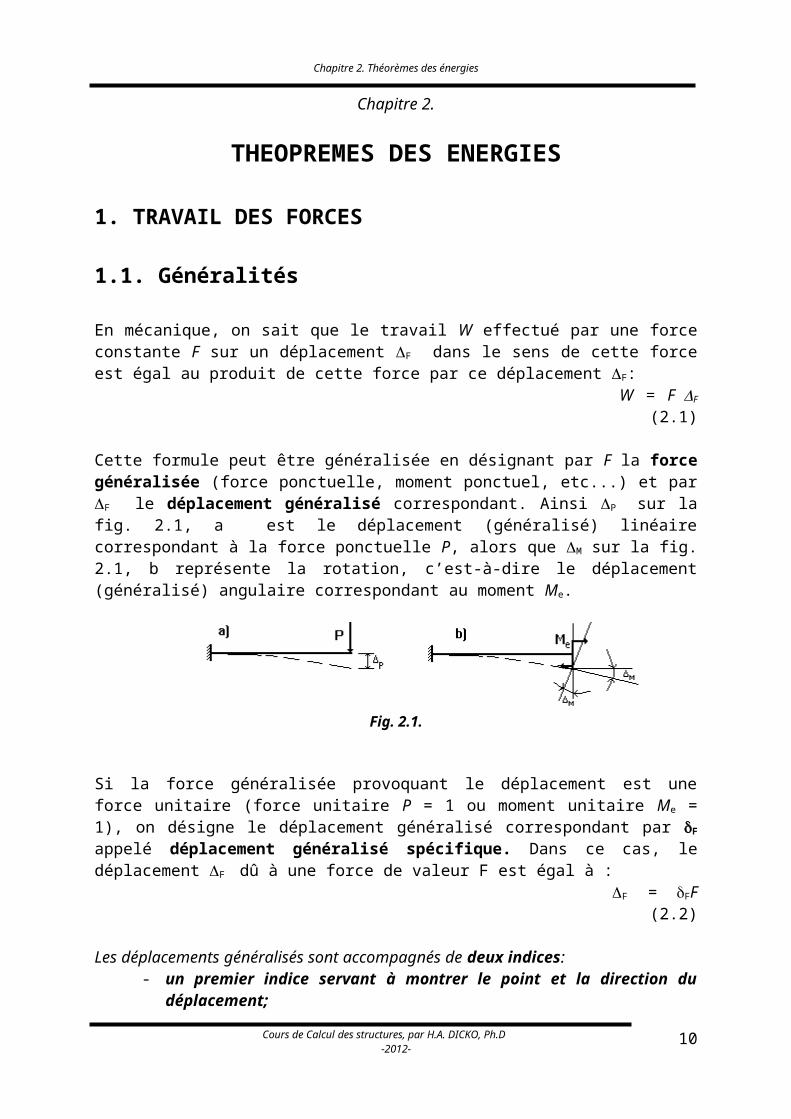
Cette formule peut être généralisée en désignant par F la force généralisée (force ponctuelle, moment ponctuel, etc...) et par F le déplacement généralisé correspondant. Ainsi P sur la fig. 2.1, a est le déplacement (généralisé) linéaire correspondant à la force ponctuelle P, alors que M sur la fig. 2.1, b représente la rotation, c’est-à-dire le déplacement (généralisé) angulaire correspondant au moment Me.
Fig. 2.1.
Si la force généralisée provoquant le déplacement est une force unitaire (force unitaire P = 1 ou moment unitaire Me = 1), on désigne le déplacement généralisé correspondant par F
appelé déplacement généralisé spécifique. Dans ce cas, le déplacement F dû à une force de valeur F est égal à :
F = FF (2.2)
Les déplacements généralisés sont accompagnés de deux indices:- un premier indice servant à montrer le point et la direction du déplacement;- un second indice qui montre le facteur de force à l’origine de ce déplacement.
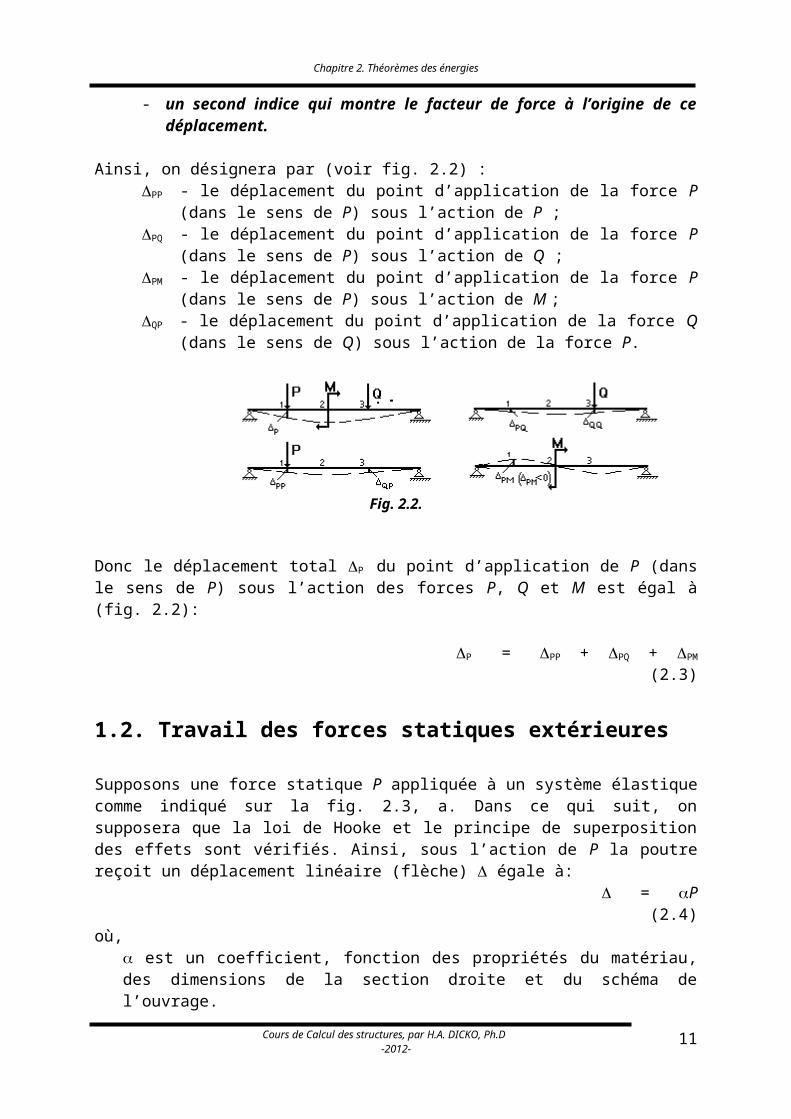
Ainsi, on désignera par (voir fig. 2.2) :PP - le déplacement du point d’application de la force P (dans le sens de P) sous
l’action de P ; PQ - le déplacement du point d’application de la force P (dans le sens de P) sous
l’action de Q ; PM - le déplacement du point d’application de la force P (dans le sens de P) sous
l’action de M ;QP - le déplacement du point d’application de la force Q (dans le sens de Q) sous
l’action de la force P.
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
10
Chapitre 2. Théorèmes des énergies
Fig. 2.2.
Donc le déplacement total P du point d’application de P (dans le sens de P) sous l’action des forces P, Q et M est égal à (fig. 2.2):
P = PP + PQ + PM (2.3)
1.2. Travail des forces statiques extérieures
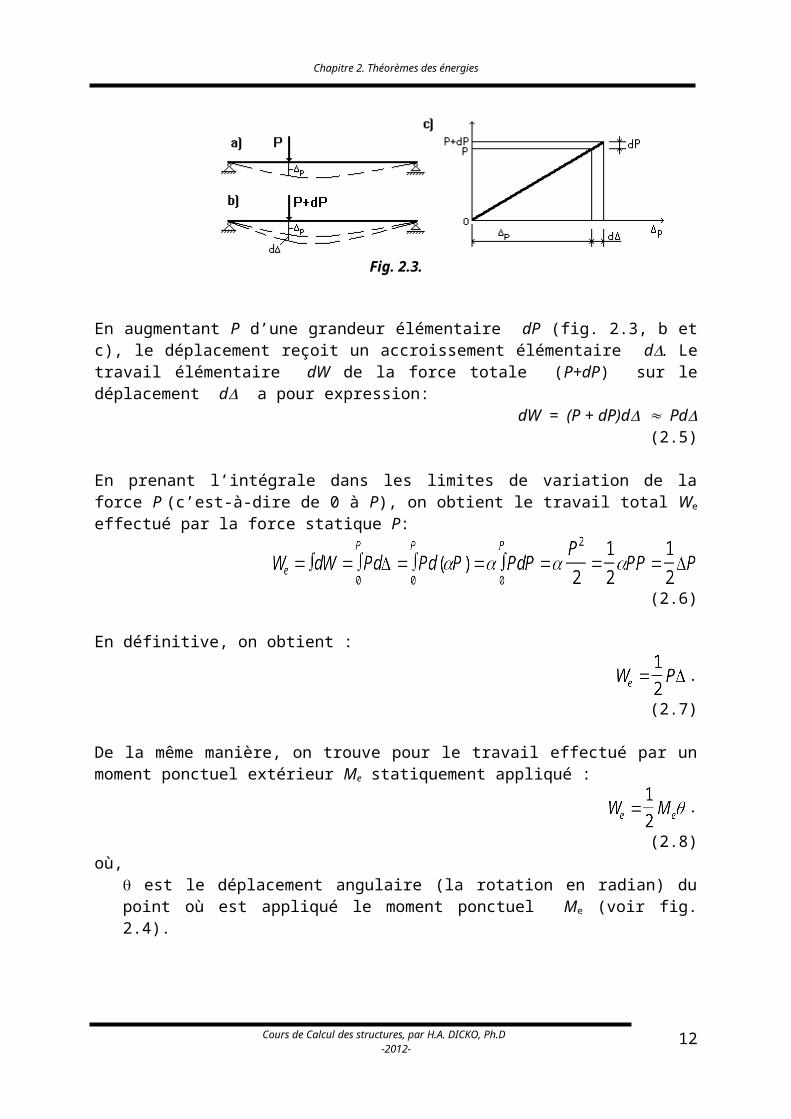
Supposons une force statique P appliquée à un système élastique comme indiqué sur la fig. 2.3, a. Dans ce qui suit, on supposera que la loi de Hooke et le principe de superposition des effets sont vérifiés. Ainsi, sous l’action de P la poutre reçoit un déplacement linéaire (flèche) égale à:
= P (2.4)où,
est un coefficient, fonction des propriétés du matériau, des dimensions de la section droite et du schéma de l’ouvrage.
Fig. 2.3.
En augmentant P d’une grandeur élémentaire dP (fig. 2.3, b et c), le déplacement reçoit un accroissement élémentaire d. Le travail élémentaire dW de la force totale (P+dP) sur le déplacement d a pour expression:
dW = (P + dP)d Pd (2.5)
En prenant l’intégrale dans les limites de variation de la force P (c’est-à-dire de 0 à P), on obtient le travail total We effectué par la force statique P:
(2.6)
En définitive, on obtient :
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
11
Chapitre 2. Théorèmes des énergies
. (2.7)
De la même manière, on trouve pour le travail effectué par un moment ponctuel extérieur Me
statiquement appliqué :
. (2.8)
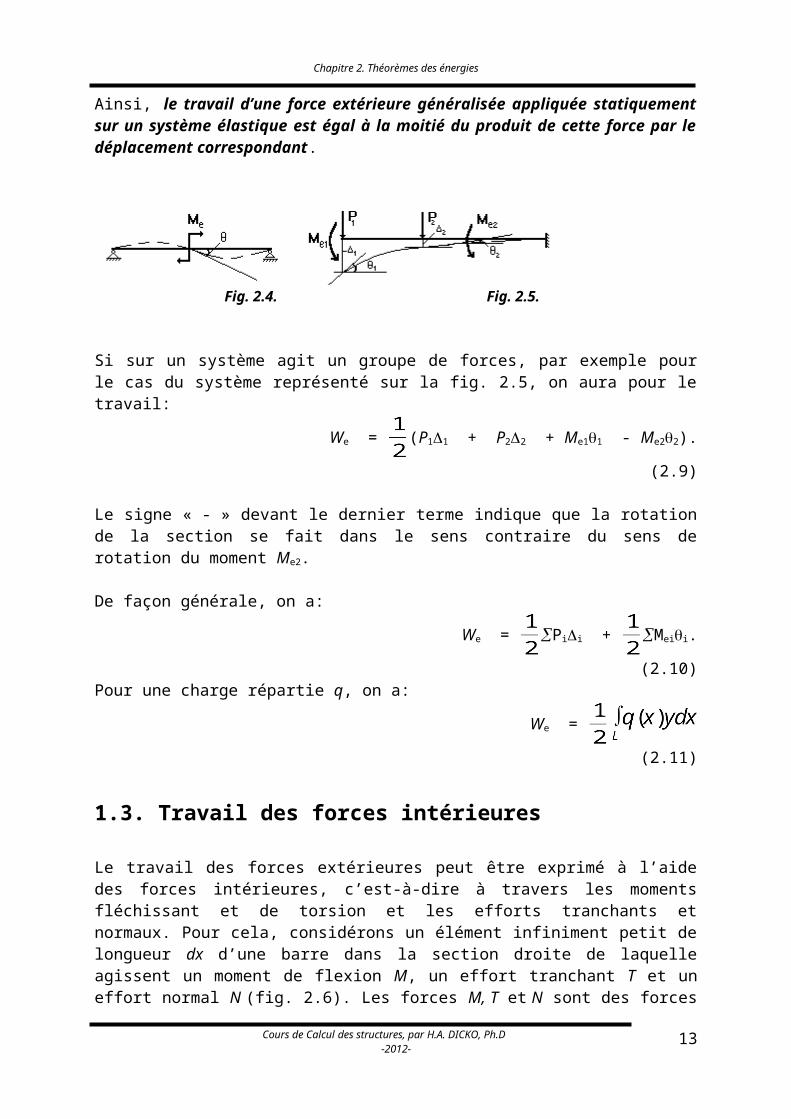
où, est le déplacement angulaire (la rotation en radian) du point où est appliqué le moment ponctuel Me (voir fig. 2.4).
Ainsi, le travail d’une force extérieure généralisée appliquée statiquement sur un système élastique est égal à la moitié du produit de cette force par le déplacement correspondant.
Fig. 2.4. Fig. 2.5.
Si sur un système agit un groupe de forces, par exemple pour le cas du système représenté sur la fig. 2.5, on aura pour le travail:
We = (P11 + P22 + Me11 - Me22). (2.9)
Le signe « - » devant le dernier terme indique que la rotation de la section se fait dans le sens contraire du sens de rotation du moment Me2.
De façon générale, on a:
We = Pii + Meii. (2.10)
Pour une charge répartie q, on a:
We = (2.11)
1.3. Travail des forces intérieures
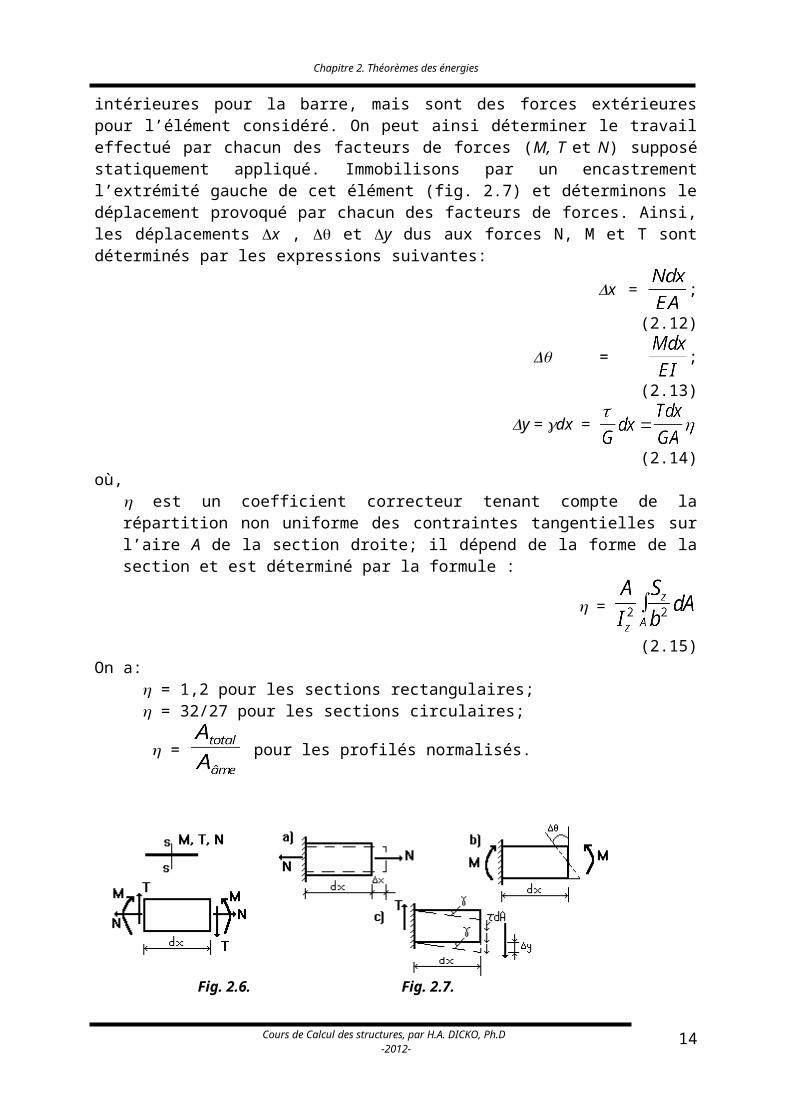
Le travail des forces extérieures peut être exprimé à l’aide des forces intérieures, c’est-à-dire à travers les moments fléchissant et de torsion et les efforts tranchants et normaux. Pour cela, considérons un élément infiniment petit de longueur dx d’une barre dans la section droite de laquelle agissent un moment de flexion M, un effort tranchant T et un effort normal N (fig. 2.6). Les forces M, T et N sont des forces intérieures pour la barre, mais sont des forces extérieures pour l’élément considéré. On peut ainsi déterminer le travail effectué par chacun des facteurs de forces (M, T et N) supposé statiquement appliqué. Immobilisons par un encastrement l’extrémité gauche de cet élément (fig. 2.7) et déterminons le déplacement provoqué par chacun des facteurs de forces. Ainsi, les déplacements x , et y dus aux forces N, M et T sont déterminés par les expressions suivantes:
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
12
Chapitre 2. Théorèmes des énergies
x = ; (2.12)
= ; (2.13)
y = dx = (2.14)
où, est un coefficient correcteur tenant compte de la répartition non uniforme des contraintes tangentielles sur l’aire A de la section droite; il dépend de la forme de la section et est déterminé par la formule :
= (2.15)
On a: = 1,2 pour les sections rectangulaires; = 32/27 pour les sections circulaires;
= pour les profilés normalisés.
Fig. 2.6. Fig. 2.7.
Les travaux élémentaires dWN , dWM et dWT effectués par les forces N, M et T respectivement sur les déplacements x , et y sont:
dWN = ; (2.16)
dWM = ; (2.17)
dWT = . (2.18)
En réalité, le travail effectué par des forces intérieures est toujours négatif, car elles sont des forces de résistance élastique, donc qui sont toujours opposées aux déplacements dus aux forces extérieures sur lesquels elles (forces intérieures) effectuent le travail. Ainsi, le travail élémentaire dW effectué par N, M et T est égal à:
dW = - dWN - dWM - dWT = . (2.19)
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
13
Chapitre 2. Théorèmes des énergies
En prenant l’intégrale de dW sur toute la longueur L de chaque tronçon (zone) de la barre et en faisant la somme de tous les tronçons du système, on obtient la formule suivante pour déterminer le travail des forces intérieures effectué sur les déplacements correspondants:
Wi = . (2.20)
Quand tous les six facteurs de forces intérieures agissent dans une section d’une barre, l’expression pour déterminer le travail a la forme suivante:
Wi =
. (2.21)
1.4. Energie potentielle de déformation
Suivant le principe de la loi de la conservation de l’énergie, le travail We des forces extérieures ne disparaît pas, mais se transforme en énergie potentielle U de déformation qui est numériquement égale au travail qu’effectuent les forces extérieures au cours du chargement ou au travail des forces intérieures au cours du déchargement:
U = We = Pii + Meii (2.22)
ou encoreU = - Wi =
. (6.23)
Ainsi, l’énergie potentielle de déformation d’un élément est égale à la somme des travaux indépendants de chacun des six facteurs de forces intérieures, donc la somme de l’énergie de traction (ou de compression), de flexion, de cisaillement et de torsion.
L’énergie potentielle de déformation est une grandeur toujours positive, car elle est une fonction quadratique des efforts internes.
1.5. Application du principe des déplacements virtuels aux systèmes élastiques
Le principe des déplacements virtuels s’énonce comme suit: « si un système soumis à l’action de charges extérieures est en équilibre, la somme des travaux qu’effectuent les forces extérieures et les forces intérieures sur des déplacements virtuels infiniment petits des points du système est égale à zéro »:
We + Wi = 0 (2.24)avec,
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
14
Chapitre 2. Théorèmes des énergies
We - le travail des forces extérieures P sur les déplacements virtuels des points d’application de ces forces ; Wi - le travail des forces intérieures.
Les déplacements virtuels sont des déplacements infiniment petits admissibles en ce moment par les liaisons appliqués au système. Pour les systèmes élastiques, en qualité de déplacements virtuels on prend les déplacements élastiques. Le travail effectué par les forces extérieures et intérieures sur les déplacements virtuels est appelé travail virtuel.
N.B. Tant que le système accomplit le déplacement virtuel, la valeur et la direction des forces extérieures et intérieures restent constantes, raison pour laquelle pour le calcul des travaux virtuels effectués sur les déplacements virtuels, il faut prendre non pas la moitié du produit, mais plutôt la valeur totale du produit des forces par les déplacements correspondants.
Ainsi, le travail virtuel Wab accompli par les forces Pa de l’état « a » sur les déplacements de l’état « b » est égal à:
Wab = Pa ab (2.25)
De même, le travail virtuel Wba accompli par les forces Pb de l’état « b » sur les déplacements de l’état « a » est égal à:
Wba = Pb ba (2.26)Ici,
ab - sont les déplacements dus aux forces de l’état « b » et ba - sont les déplacements dus aux forces de l’état « a ».
Le travail des forces intérieures de l’état « a » sur les déplacements dus aux forces de l’état « b » est égal à:
Wab = . (2.27)
Ainsi, l’expression générale du principe des déplacements virtuels pour un système élastique plan de barres se présente comme suit:
Paab = 0. (2.28)
Si en qualité de déplacements virtuels on prend les déplacements a provoqués par les forces données Pa, on obtient pour l’expression générale du principe des déplacements virtuels la forme suivante:
Paab = 0. (2.29)
Cette expression peut être écrite sous la forme :
Paab = 0. (2.30)
ou encoreWe + Wi = 0 (2.31)
avec, We = Paab (2.32)
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
15
Chapitre 2. Théorèmes des énergies
et Wi =
(2.33)où,
We et Wi représente respectivement les travaux des forces extérieures et des forces intérieures.
Ainsi, on remarquera que selon le principe des déplacements virtuels, les valeurs effectives du travail des forces extérieures et intérieures sont numériquement égales et de signes opposés.
2. THÉORÈMES GÉNÉRAUX SUR LES SYSTÈMES ÉLASTIQUES
2.1. Théorème de Castigliano
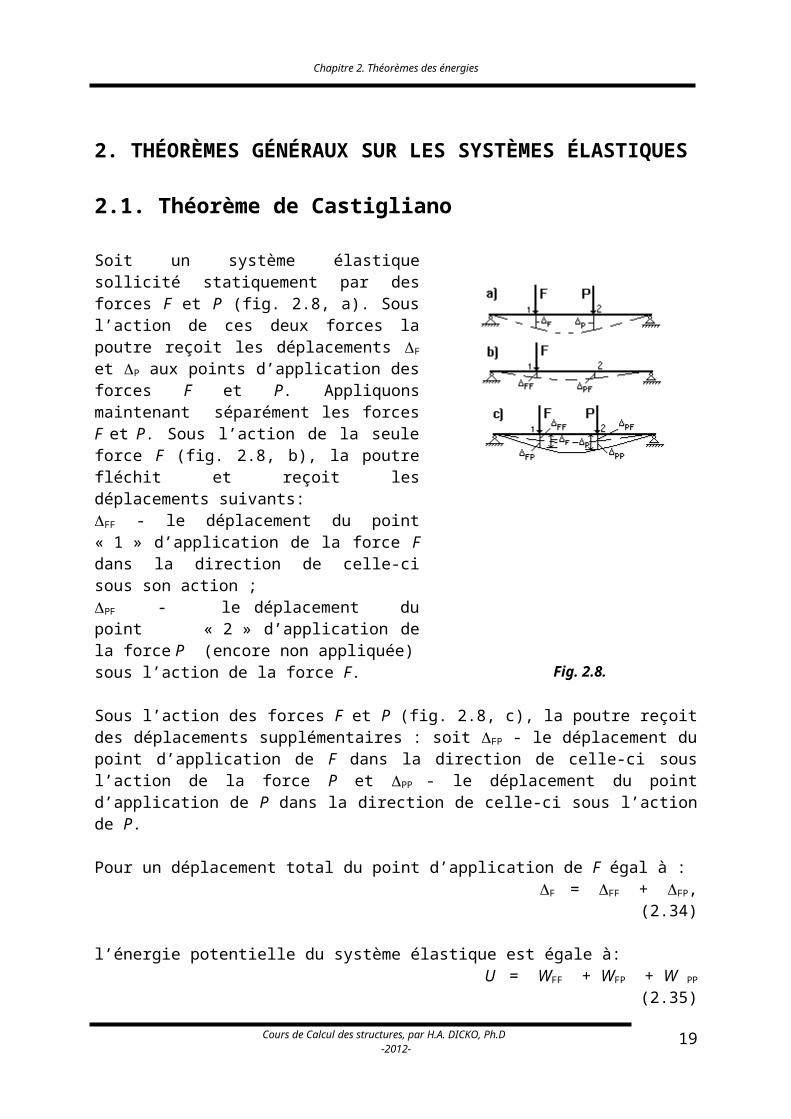
Soit un système élastique sollicité statiquement par des forces F et P (fig. 2.8, a). Sous l’action de ces deux forces la poutre reçoit les déplacements F et P aux points d’application des forces F et P. Appliquons maintenant séparément les forces F et P. Sous l’action de la seule force F (fig. 2.8, b), la poutre fléchit et reçoit les déplacements suivants: FF - le déplacement du point « 1 » d’application de la force F dans la direction de celle-ci sous son action ; PF - le déplacement du point « 2 » d’application de la force P (encore non appliquée)
sous l’action de la force F. Fig. 2.8.
Sous l’action des forces F et P (fig. 2.8, c), la poutre reçoit des déplacements supplémentaires : soit FP - le déplacement du point d’application de F dans la direction de celle-ci sous l’action de la force P et PP - le déplacement du point d’application de P dans la direction de celle-ci sous l’action de P.
Pour un déplacement total du point d’application de F égal à :F = FF + FP, (2.34)
l’énergie potentielle du système élastique est égale à:U = WFF + WFP + W PP (2.35)
avec,
WFF = FFF - le travail effectué par F sur le déplacement FF;
WFP = FFP - le travail effectué par F sur le déplacement FP; en effet, en effectuant le travail sur FP, la force F reste constante, c’est pourquoi le produit est sans le facteur 1/2.
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
16
Chapitre 2. Théorèmes des énergies
WPP = UPP - l’énergie potentielle accumulée au cours de la déformation du système par la force P, numériquement égale au travail effectué par P sur les déplacements qu’elle provoque.
Donc, on obtient pour l’énergie potentielle du système l’expression suivante:
U = FFF + FFP + UPP (2.36)
Le déplacement FF est égal à FFF (FF = FFF), donc, on a :
U = F2FF + FFP + UPP (2.37)
En prenant la dérivée partielle de l’énergie U par rapport à la force F, on aura:
= 2FFF + FP = FFF + FP = FF + FP = F. (2.38)
Donc, on a:
= F (2.39)
Cette dernière formule exprime le théorème de Castigliano qui s’énonce comme suit: « le déplacement F du point d’application d’une force généralisée F dans la direction de cette dernière est égal à la dérivée partielle de l’énergie potentielle U par rapport à cette force ».
On peut remarquer que la dérivée seconde de U par rapport à F est égale à :
(2.40)
où, FF est le déplacement spécifique du point d’application de F dans le sens de F sous l’action de F = 1; c’est donc une grandeur substantiellement positive.
Pour un système plan de barres (portiques plans, par exemple), l’énergie potentielle U de déformation est égale à :
U = . (2.41)
Selon le théorème de Castigliano, on a:
F = = . (2.42)
En négligeant l’influence des efforts normaux N et tranchants T sur la valeur du déplacement (dans le cas général, l’influence de N et T est négligée), on aura:
F = = . (2.43)
Cette formule permet de déterminer le déplacement F du point d’application d’une force généralisée F.
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
17
Chapitre 2. Théorèmes des énergies
Dans le cas général où il y a les six facteurs de forces intérieures, on obtient pour l’expression générale du déplacement F du point d’application d’une force généralisée F:
F = =
+
. (2.44)
Pour déterminer le déplacement généralisé en un point où aucune force n’est appliquée, (c’est-à-dire que la force correspondant au déplacement généralisé n’est pas appliquée), on introduit une force fictive correspondant au déplacement qu’on désire déterminer (force ponctuelle fictive si c’est un déplacement linéaire qu’on veut déterminer et un moment ponctuel fictif si c’est une rotation qu’on veut déterminer); l’expression pour l’énergie potentielle de déformation contenant cette force fictive est alors dérivée par rapport à ladite force fictive, après quoi, dans l’expression finale pour le déplacement, on annule la force fictive.
2.2. Théorème de Lagrange
Ce théorème s’énonce comme suit: « la dérivée partielle de l’énergie potentielle U par rapport à un déplacement quelconque i est égale à la force Fi agissant dans le sens du déplacement »:
= Fi (2.45)
En effet, le déplacement i dans le sens d’une force généralisée Fi peut être exprimée par la formule:
i = kFi (2.46)où,
k est un coefficient, fonction des caractéristiques géométriques de la section droite, des propriétés du matériau et du système de liaisons.
La force généralisée Fi sera dans ce cas: Fi = i /k (2.47)
L’énergie potentielle de déformation U étant numériquement égale au travail des forces extérieures, on obtient:
U = Fi i = i = (2.48)
En prenant la dérivée première de U par rapport à i et compte tenu de l’expression (2.47), on aura:
= = Fi (2.49)
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
18
Chapitre 2. Théorèmes des énergies
d’où, l’expression du théorème de Lagrange :
= Fi (2.50)
2.3. Théorème de réciprocité des travaux et des déplacements
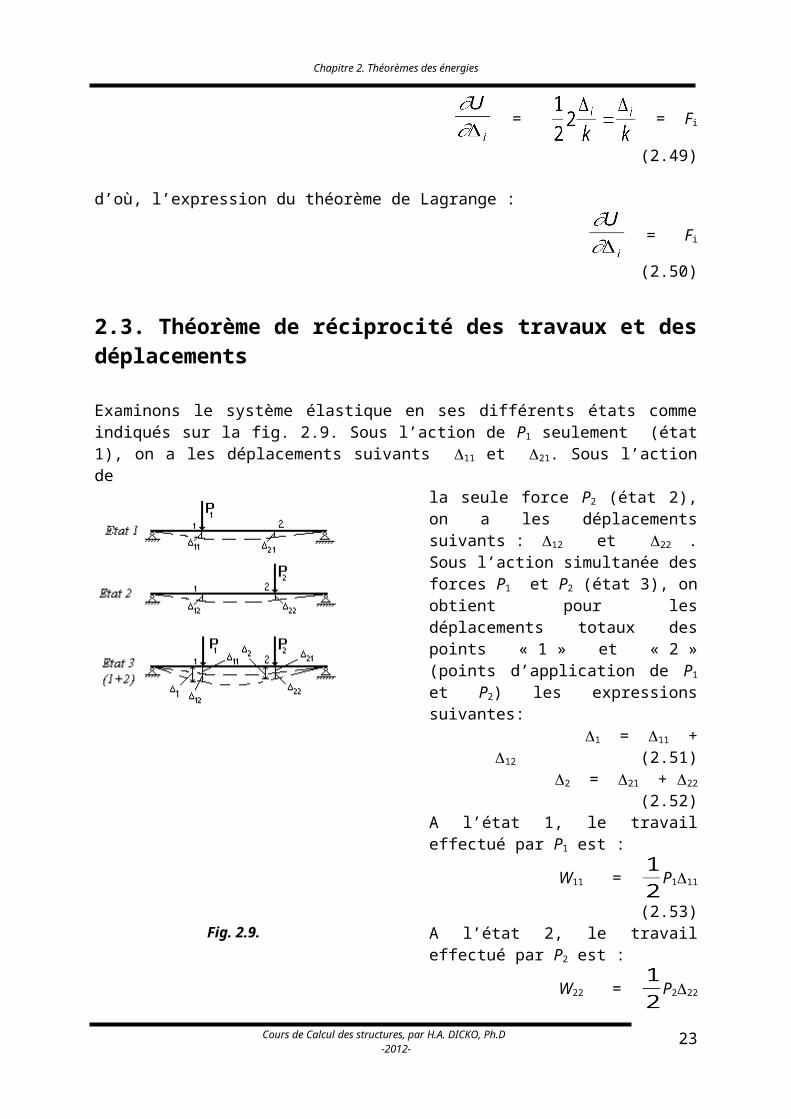
Examinons le système élastique en ses différents états comme indiqués sur la fig. 2.9. Sous l’action de P1 seulement (état 1), on a les déplacements suivants 11 et 21. Sous l’action de
la seule force P2 (état 2), on a les déplacements suivants : 12 et 22 . Sous l’action simultanée des forces P1 et P2
(état 3), on obtient pour les déplacements totaux des points « 1 » et « 2 » (points d’application de P1 et P2) les expressions suivantes:
1 = 11 + 12 (2.51)2 = 21 + 22 (2.52)
A l’état 1, le travail effectué par P1 est :
W11 = P111 (2.53)
Fig. 2.9. A l’état 2, le travail effectué par P2 est :
W22 = P222 (2.54)
Appliquons successivement maintenant P1, puis P2 (état 3). Durant l’application de P2 la force P1 est restée constante et s’est déplacée d’une grandeur 12 vers le bas en effectuant ainsi un travail de valeur :
W12 = P1 12 (2.55) Ainsi, le travail total effectué en appliquant successivement les forces P1 et P2 est égal à:
W = W11 + W22 + W12 (2.56)ou encore
W = P111 + P222 + P112 (2.57)
D’autre part, le travail effectué par les forces P1 et P2 peut être déterminé comme la demi somme des produits de chacune des forces sur le déplacement total lui correspondant et provoqué par les deux forces:
W = P11 + P22 (2.58)
En remplaçant 1 et 2 par leurs valeurs des expressions (6.51) et (6.52), on obtient :
W = P1 (11 + 12) + P2 (21 + 22) = P111 + P112 + P221 + P222 (2.59)
En posant l’égalité entre ces deux expressions du travail W (expressions (6.57) et (6.59)), on obtient:
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
19
Chapitre 2. Théorèmes des énergies
P111 + P222 + P112 = P111 + P112 + P221 + P222 (2.60)
ou encore, en simplifiant: P1 12 = P2 21 (2.61)
On obtient la même égalité en appliquant successivement P2 puis P1; le travail sera dans ce cas:
W = P222 + P111 + P221 (2.62)
En posant l’égalité entre les deux expressions de W (expressions (2.59) et (2.62), on obtient:
P111 + P112 + P221 + P222 = P222 + P111 + P221 (2.63)
ou encore en simplifiant: P2 21 = P1 12 (2.64)
Ici, le produit P112 est le travail W12 effectué par la force P1 sur le déplacement 12 du point d’application de P1 et provoqué par la force P2 ; le produit P2 21 est le travail W21
effectué par la force P2 sur le déplacement 21 du point d’application de P2 et provoqué par la force P1 . On peut donc écrire que :
W12 = W21 (2.65)
On aura le même résultat si l’on applique au système un nombre quelconque de forces ou de moments. Cette dernière formule (6.65) exprime le théorème de réciprocité des travaux ou théorème de Betti qui s’énonce comme suit: « le travail des forces d’un premier état sur les déplacements dus aux forces d’un deuxième état est égal au travail des forces du deuxième état sur les déplacements dus aux forces du premier état. ».
Dans le cas particulier où P1 = 1 et P2 = 2, les déplacements correspondants seront appelés déplacements spécifiques et on aura les désignations suivantes : 12 = 12 et 21 = 21. Dans ce cas, l’expression du théorème de réciprocité des travaux devient :
1.12 = 1.21 (2.66)ou encore
12 = 21 (2.67)
Cette dernière égalité (6.67) exprime le théorème de réciprocité des déplacements ou théorème de Maxwell qui s’énonce comme suit: « le déplacement du point d’application de la première force unitaire dans le sens de cette dernière sous l’action de la deuxième force unitaire est égal au déplacement du point d’application de la deuxième force unitaire dans le sens de cette dernière sous l’action de la première force unitaire ».
3. DETERMINATION DES DEPLACEMENTS PAR LA METHODE DE MOHR
3.1. L’intégrale de Mohr
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
20

Chapitre 2. Théorèmes des énergies
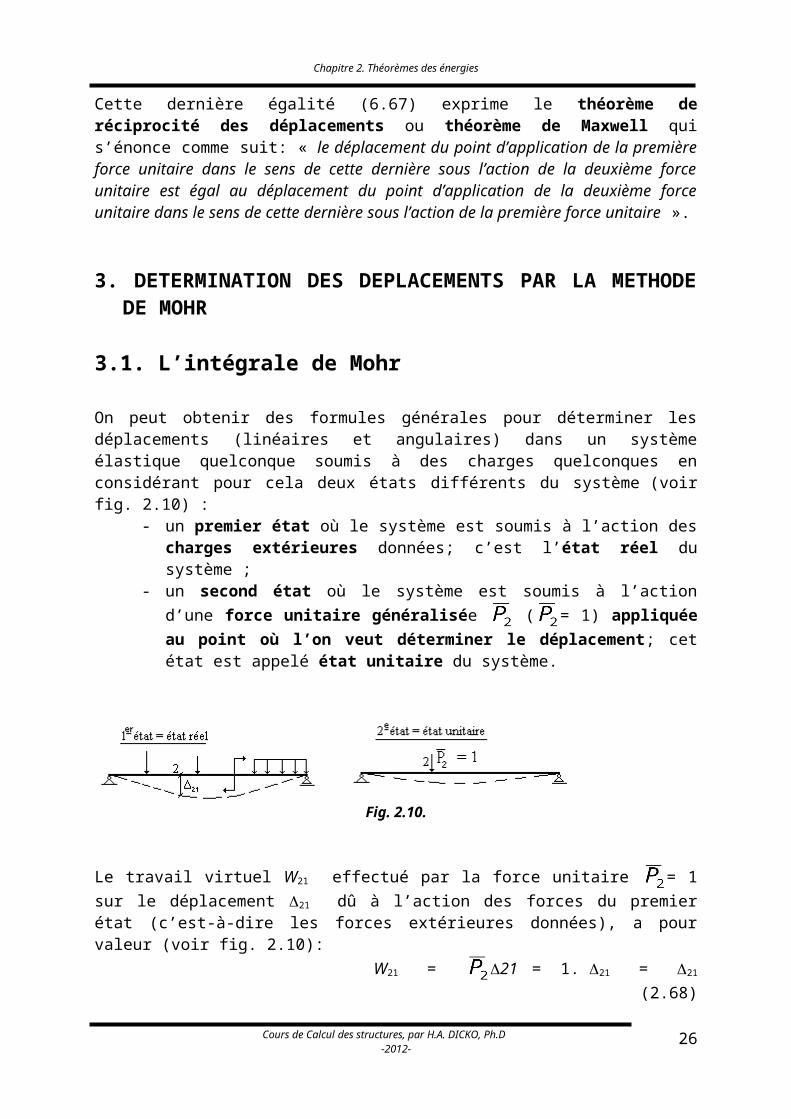
On peut obtenir des formules générales pour déterminer les déplacements (linéaires et angulaires) dans un système élastique quelconque soumis à des charges quelconques en considérant pour cela deux états différents du système (voir fig. 2.10) :
- un premier état où le système est soumis à l’action des charges extérieures données; c’est l’état réel du système ;
- un second état où le système est soumis à l’action d’une force unitaire généralisée ( = 1) appliquée au point où l’on veut déterminer le déplacement; cet état est appelé état unitaire du système.
Fig. 2.10.
Le travail virtuel W21 effectué par la force unitaire = 1 sur le déplacement 21 dû à l’action des forces du premier état (c’est-à-dire les forces extérieures données), a pour valeur (voir fig. 2.10):
W21 = 21 = 1. 21 = 21 (2.68)Ainsi, on a:
W21 = 21 (2.69)
A l’aide de cette égalité, on peut donc déterminer le déplacement 21, c’est-à-dire le déplacement du point d’application de la force unitaire sous l’action des forces extérieures données. En exprimant W21 à travers les efforts internes développés dans le système, on aura, dans le cas d’un système plan :
W21 = 21 = (2.70)
où,, , - les efforts internes (sollicitations) dus à la force unitaire = 1 (force du
deuxième état) ; M1 , N2 , T1 - les efforts internes dus aux forces du premier état, c’est-à-dire aux charges extérieures données.
Ainsi, par cette expression, on peut déterminer le déplacement en un point quelconque du système, à l’aide des sollicitations développées dans le système sous l’action de la charge donnée et d’une charge unitaire appliquée au point où l’on désire déterminer ce déplacement. La direction de la charge unitaire doit coïncider avec celle du déplacement recherché. Si on veut déterminer le déplacement linéaire d’un point dans un sens (par exemple horizontal ou vertical), on applique au point intéressé une force ponctuelle unitaire = 1 dans le même sens. Si le déplacement à déterminer est angulaire (rotation), la charge unitaire appliquée est un couple ponctuel unitaire = 1. Le signe du résultat de calcul montrera le vrai sens du déplacement. Si le signe obtenu est « + », cela signifie que le sens donné à la force unitaire correspond au sens du déplacement. Si le signe obtenu est « - », cela signifie que le sens réel du déplacement est contraire au sens donné à la force unitaire. Les forces généralisées unitaires sont sans unités.
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
21

Chapitre 2. Théorèmes des énergies
Dans le cas général, quand tous les six facteurs des forces intérieures sont présents, on a :iF =
+
+ (2.71)
Cette méthode de détermination des déplacements est appelée méthode de Mohr ou méthode de multiplication des épures ; l’intégrale est appelée intégrale de Mohr.Pour les poutres, les portiques et les arcs, on peut, dans la majorité des cas, négliger l’influence des efforts normaux et tranchants sur les déplacements et ne tenir compte que des déplacements dus aux efforts de flexion, c’est-à-dire des déplacements dus à la flexion. Dans ce cas, on aura:
iF = (2.72)
où, s décrit la ligne géométrique de la barre.
Pour un système plan, sans moment de torsion Mt, on a:
iF = (2.73)
En cas de flexion simple, on a:
iF = (2.74)
Pour les fermes articulées, constituées de barres droites, où il n’y a que des efforts normaux qui apparaissent, on a :
iF = (2.75)
Plan de calcul des déplacements par la méthode de Mohr
1. Déterminer les expressions des sollicitations SF (moments et efforts) dues à la charge extérieure donnée comme fonctions de l’abscisse x d’une section quelconque.
2. On applique au point où l’on désire déterminer le déplacement, dans la direction de ce déplacement recherché, une force unitaire correspondante (force ponctuelle unitaire pour un déplacement linéaire et couple ponctuel unitaire pour une rotation).
3. Déterminer les expressions des sollicitations dues à la force unitaire comme fonctions de l’abscisse x d’une section quelconque.
4. Placer les expressions des sollicitations SF et dans la formule (l’intégrale) de Mohr et calculer l’intégrale pour tous les tronçons du système (la sommation se fait pour l’ensemble des tronçons du système) afin de déterminer la valeur du déplacement iF. Si iF > 0, cela veut dire que le déplacement se fait dans le sens de la force unitaire; si par contre iF < 0, alors le déplacement s’effectue dans le sens contraire de la force unitaire.
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
22
Chapitre 2. Théorèmes des énergies
3.2. Méthode grapho-analytique de calcul de l’intégrale de Mohr ou procédé de Véréchaguine
La détermination des déplacements par la méthode de Mohr des systèmes constitués d’éléments à section droite constante peut être considérablement simplifiée à l’aide d’un
procédé grapho-analytique de calcul de l’intégrale ; ce procédé est appelé
procédé de Véréchaguine. Aussi, il est couramment appelé méthode de multiplication des diagrammes (ou des épures). Cette méthode est utilisée quand au moins un des diagrammes (celui de ou celui de MF ) est rectiligne.
Pour expliquer ce procédé, adoptons tout d’abord les notations suivantes (voir fig. 2.11).F - aire du diagramme
de MF ; C - le centre de gravité de
l’épure de MF ;Fig. 2.11. - ordonnée de l’épure
de située en dessous du centre de gravité C de F.
En tout point d’abscisse x, on peut écrire: = (a + x)tg (2.76)
En plaçant cette valeur de dans l’intégrale , on obtient:
= = tg = tg (2.77)
avec,dF = MF dx - la différentielle de l’aire de l’épure de MF.
On peut remarquer que l’intégrale est le moment statique de l’aire F par
rapport à l’axe 00’ (voir fig. 2.11) ; on peut ainsi écrire:
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
23
Chapitre 2. Théorèmes des énergies
= F (a + xC) (2.78)
avec,(a + xC) - l’abscisse du centre de gravité C de l’aire F par rapport à l’axe 00’.
On a donc
= F (a + xC)tan (2.79)
Sur l’épure de , on a:
tan = , (2.80)
d’où (a + xC )tg = (2.81)
On obtient ainsi l’expression suivante pour l’intégrale:
= F (2.82)
Cette expression est appelée formule de Véréchaguine ; elle montre que la multiplication des deux épures est égale au produit de l’aire F de la première épure par l’ordonnée de la deuxième épure (épure rectiligne), prise sous le centre de gravité de l’aire de la première épure.
Pour déterminer le déplacement, il ne faut pas oublier que le produit obtenu doit être divisé par la rigidité de la section droite EI en flexion. Ainsi, la formule générale pour déterminer les déplacements prend la forme suivante:
iF = = (2.83)
Le calcul s’effectue pour chaque tronçon où l’épure linéaire ne comporte pas de brisures.
On peut dégager quelques règles de calcul.
Règle 1 : Pour le cas où les deux épures ( et MF) sont toutes deux rectilignes, on multiplie l’aire de l’une d’entre elles par l’ordonnée de l’autre, ordonnée prise sous le centre de gravité de la première épure (voir fig. 2.12):
F = yF
(2.84)
Fig. 2.12. Règle 2 : Si l’épure de MF est de
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
24
Chapitre 2. Théorèmes des énergies
configuration complexe, on la subdivise en figures (aires) simples dont il est facile de déterminer pour chacune d’elles la coordonnée du centre de gravité. On multiplie alors l’aire de chaque figure simple par l’ordonnée de l’épure unitaire prise sous le centre de gravité de l’aire simple. Par exemple, pour la figure complexe montrée sur la fig. 6.13, on a:
iF = (2.85)
Fig. 2.13.
Règle 3 : Dans la formule de Véréchaguine, on place devant le produit .yC le signe « + » quand les deux épures sont situées du même côté de l’axe de référence (axe des abscisses) et le signe « - » dans le cas contraire, c’est-à-dire quand les deux épures sont situées de part et d’autre de cet axe (voir fig. 2.14).
Fig. 2.14.
Règle 4 : Quand les deux épures ont la forme d’un trapèze, il est préférable de diviser chaque trapèze en deux triangles et multiplier l’aire de chacun par l’ordonnée sous son centre de gravité prise sur l’autre épure. Ainsi, pour les cas de la fig. 2.15, on obtient:
F yC = a ya + b yb (2.86)avec,
a = aL ; (2.87)
b = bL ; (2.88)
ya = c + d ; (2.89)
et yb = c + d (2.90)
Fig. 2.15.En plaçant ces valeurs dans la formule de départ, on obtient:
F yC = a ya + b yb = (2ac + 2bd + ad + bc) (2.91)
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
25
Chapitre 2. Théorèmes des énergies
Dans cette formule, on remarque qu’entre parenthèses, les produits ac et bd, c’est-à-dire les produits des ordonnées situées du même côté (à gauche ou à droite) sont avec le coefficient 2 et que les produits ad et bc des ordonnées situées de côtés opposés sont avec un coefficient 1.
Les produits des hauteurs des côtés sont pris avec le signe « + » si les deux ordonnées ont même signe (c’est-à-dire sont du même côté par rapport l’axe des abscisses x) et avec le signe « - » si elles sont de signes contraires, c’est-à-dire ne sont pas du même côté par rapport à l’axe des abscisses. Ainsi, on aura successivement pour les cas suivants (voir fig. 6.16):
- pour le cas de la fig. 2.16, a :
F yC = (2ac - 2bd + ad - bc) (2.92)
- pour le cas de la fig. 2.16, b :
F yC = ( - 2ac - 2bd + ad + bc) (2.93)
La formule est applicable même quand une des épures est triangulaire ; dans ce cas, on prend l’ordonnée égale à zéro (voir fig. 2.16, c):
F yC = (2ac + ad) (2.94)
Fig. 2.16.
Règle 5 : La multiplication d’une épure trapézoïdale avec une épure de forme quelconque peut être faite en décomposant le trapèze en deux triangles (voir fig. 2.17).
Règle 6 : Il arrive qu’aucune des deux épures n’est rectiligne, mais peuvent être limitées par des lignes droites ; dans ces conditions, on doit les décomposer en plusieurs tronçons de manière que dans les limites de chaque tronçon, au moins une épure soit rectiligne (voir fig. 2.18).
Fig. 2.17.
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
26

Chapitre 2. Théorèmes des énergies
Fig. 2.18.
Règle 7 : Quand une des épures est parabolique (action d’une charge uniformément répartie q), pour la multiplier avec l’autre, on la considère comme la somme ou la différence, selon les cas, (voir fig. 2.19) d’une épure trapézoïdale et d’une parabole ; on aura ainsi :
F yC = (2ac + 2bd + ad + bc) eLg (2.95)
ou encore, dans les deux cas:
F yC = ( ac + 4fg + bd ) (2.96)
avec :- pour le cas de la fig. 2.19, a :
f = + e ; e = qL2 ; g = (6.97)
- pour le cas de la fig. 2.19, b :
f = - e ; e = qL2 ; g = (2.98)
Fig. 2.19.
Les aires et les positions des centres de gravité de quelques figures très répandues sont données dans le tableau 2.1.
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
27
Chapitre 2. Théorèmes des énergies
Tableau 2.1. Aires et coordonnées du centre de gravités de certaines figures simples.Nom de figure
Schéma de figure Aire Coordonnée du centre de gravité xC
Rectangle hL L
Triangle rectangle
hL L
Trapèze (h1 + h2 )L L
Triangle quelconque
hL (a + L)
Parabole quadratique
hL L
Parabole cubique
hL L
Parabole quadratique
hL L
Moitié d’une parabole
quadratique
hL L
Parabole de n - degré
hL L
Parabole quadratique
qL(L2 + 3a2 + 3aL)
Cours de Calcul des structures, par H.A. DICKO, Ph.D-2012-
28