chapitre 1: introduction - pic vietnam · comme la masse, la taille, le diamètre de deux roues, la...
TRANSCRIPT
Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 1 PFIEV-IPHCM
CHAPITRE 1: INTRODUCTION L’objetif de mon sujet est une combinaison de deux pensées: l’équilibration de
l’homme sur deux pieds et la mobilité de voiture sur quatre roues dans le transport. En concernant du sujet, on connaît généralement les principals de l’équilibration de Pendule Inverse, la coordination et le traitement de signal des capteurs et l’amplificateur des puissances de MOSFET. À cause de l’intégration et de la programmation des capteurs, j’ai recherche des méthods pour ameliorer et pour la combinaison des capteurs bon marchés. C’est la raison pour la quelle, je vais avoir des signaux délicieux de capteurs.
Dans le cadre de mon sujet, je’ai développé un modèle réel lequel est un véhicule sur deux roues. L’axe de deux roues est le même (le axe de deux roues du vélo est parallèl). Le modèle est équipé quelque capteur pour mesurer l’angle, la vitesse de rotation et la vitesse du modèle. Ces capteurs d'angles doivent être petits, légers et peu coûteux. J’ai choisi un accéléromètre ADXL202A et un gyro ENC-03, MP325. L’ADXL202A, cet appareil électronique permet de mesurer l’accélération selon deux axes par rapport à l'horizontale. La technologie la plus simple à mettre en oeuvre utilise en réalité deux accéléromètres. En mesurant la variation du champ gravitationnel terrestre projeté sur les axes du capteur, on déduit les angles formés entre le capteur et la verticale. De par son principe de fonctionnement, ce capteur risque de poser des problèmes lorsque le capteur sera déplacé, car les accélérations seront susceptibles de perturber les mesures d'inclinaisons. Le MP325 est un gyro piézo-électrique, est utilisé dans des R/C hélicoptères, mais son fonction est mesurer la vitesse de rotation.
J’utilise un accéléromètre deux axes et un gyro comme des capteurs d’angles. Pour des capteurs d’angle, des microcontrôleurs et des actioneurs, le modèle possède la capacité d’auto équilibration sur deux roues et du mouvement. Avec le structure que deux roues sont parallèles, le centre de gravité du modèle est toujours dans le zone du support de deux roues pendant le mouvement.
Dans le système des capteurs, pour éliminer le bruit/pertubation et l’erreur du signal, pour estimer précissement la valeur mesurée des capteurs combinés, les filtres de Kalman sont appris et utilisés pour avoir le résultat optimal des états du modèle, implique les valeurs des capteurs et la commande de l’utiliseur. On est dans un système d'état dans lequel, il y a des perturbations. On modélise dans ce cas l'écart par rapport à l'équation déterministe. Les filtres de Kalman sont les meilleurs estimateurs des équations d'états.
Quand l’équations de la bruit/pertubation et de mesure sont établi sur chaque capteur, les filtres de Kalman estimatent des signaux pertubés de source d’entrée (les signaux de inclinomètre et de gyro) pour avoir des signaux ‘purs’ à la source de sortie: pas de pertubation et pas d’error, parce ce que la coordination des signaux

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 2 PFIEV-IPHCM
d’entrée (le gyro mesure la vitesse de rotation, il est différent de la valeur de l’inclinomètre: l’angle).
À partie de signaux mesurés, et quelque grandeurs caractéristiques du modèle comme la masse, la taille, le diamètre de deux roues, la puissance du moteur électrique, je vais avoir des valeurs du moment inertie, la vitesse maximale de mouvement, l’aire du support des roues, puis je vais avoir les commandes suitables (commande par retour d’état) pour le modèle est en équilibre.
Tous le modèle est commandé par un microcontrôleurs PIC 18F452. Il est un microcontrôleur de PIC, lesquel a la capacité pour résoudre des signaux de capteurs et transfèrent à l’amplificateur de puissance du moteur ou l‘actioneur hyraulique. Le microcontrôleur marche comme un système des filtres de Kalman avec les signaux des capteurs d’inclinomètre et gyro. Les signaux resultats sont traités avec les signaux de codeurs incrémentals (équippé avec dex roues) et il a les commandes deux moteurs électriques, maintient le modèle en équilibre et en mouvement (à droit, à gauche...). Dans mon expérience, le temps pour completer un process du filtre de Kalman se passe environ 1.6ms, et le temps pour les calculs de regulateur se passe environ 500μs avec la fréquence auquelle le PIC18Fxxx marche est 10MHz PLL. La communication entre le PIC et l’ordinateur est la communication d’USART pour cablirer des cateurs et la covariance de bruit. L’objectif de mon sujet peut être un expérience de la fabrication d’un Pendule Inverse est appliqué dans la fabrication des robots en équilibres et du robot humanoïde. Mes travails sont les suivantes : -Calculer les paramètres dynamiques d’ un modèle Scooter d’équilibre. A partir de ces résultats, Nous allons effectuer des simulations et construire un shéma mécanique. -Fabriquer une maquette et des cartes électroniques : le circuit d’attaque MOSFET, la carte des puissances de MOSFET, la carte des capteurs, la carte pilotage et la programmation de microcontrôleur à commander. Le but du sujet : fabriquer d’une maquette de transport qui se maintient en équilibre sur deux roues parallèles. L’utilisation du MATLABTM-SIMULINK pour simuler est les expériences avant de faire les maquettes réelles. Le véhicule est un châssis en inox lequel associe également un guidon en inox, un plancher scooter en aluminium et deux roues intégrés deux moteurs en parallèles. Cette simulation se prouve qu’il est possible de commander ce système. Le véhicule consiste deux moteurs à courant continu intégrés dans deux roues sont contrôlés par un microcontrôleur PIC18F452, grâce à un amplificateur d’énergie électrique pour des moteurs. Les accus lesquels sont montés sous le plancher sont l’alimentation électrique pour le véhicule.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 3 PFIEV-IPHCM
CHAPITRE 2: L’OBJECTIF Le but de projet est la construction d’un véhicule en auto balance, il est capable
de marcher dans une surface plane. Il sont le développement le résultat dynamique du pendule inverse. La capacité de balance sur deux roues est très efficace pour la mobilité, la facilité de rotation dans l’espace serré.
Faire la connaissance des scooters et robots en équilibre, le principe de l’autobalance.
Calculer les paramètres dynammiques du véhicule, les équations d’état du modèle.
Construire le simulation en MSc Nastran và Matlab. Projeter le modèle et fabriquer la structure mécanique du modèle. La carte principale pour pilotage, lequel traite des signaux des capteurs,
et pilote des aux moteurs à courant continu. Apporter le circuit pour unir l’accéléromètre et le gyro. Les cartes de l’amplificateur de courant ayant les puissances de
MOSFETs (le circuit d’attaque MOSFET), type de push-pull en hautes fréquences.
Les cartes des MOSs parallèles qui permet le pilotage en haute fréquence du circuit du pont en H de MOSFET.
Construire l’algorithme du pilotage et du filtre de Kalman sur PIC18F452.
La communication entre le PIC 18F452 et l’ordinateur. Le code source à PIC 18F452.
La méthode du recherche: Construire le modèle géneral en simulation:
o Le modèle équivalent – le pendule inverse. o Le simulation de vN Nastran et MatLAb-Simulink: scooter en
équilibre. S’approcher le modèle réel:
o Projeter le châssis du scooter. o Les cartes de puissance de MOSFET (commander des moteurs). o Les capteurs (angle, position). o Calibrer la valeur réel des capteurs.
Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 4 PFIEV-IPHCM
o La carte principale pour le microcontrôleur et des cartes des capteurs.
o Le code source.
Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 5 PFIEV-IPHCM
CHAPITRE 3: MISE EN ŒURVE
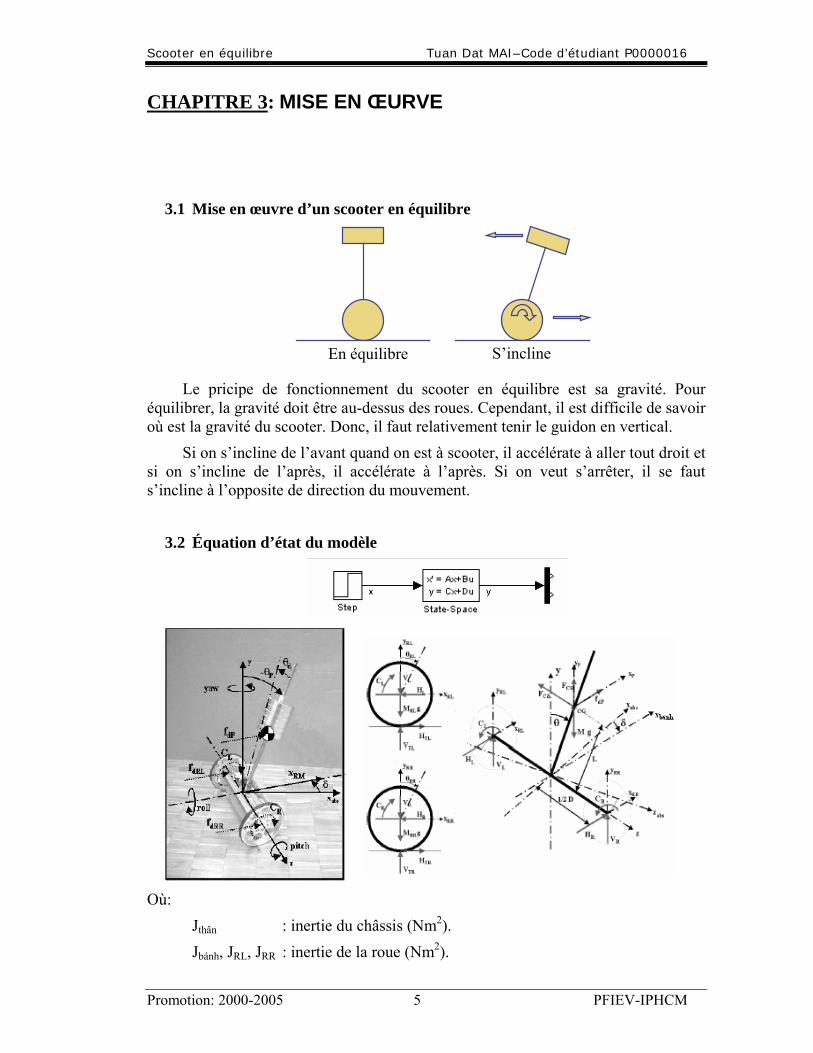
3.1 Mise en œuvre d’un scooter en équilibre
Le pricipe de fonctionnement du scooter en équilibre est sa gravité. Pour
équilibrer, la gravité doit être au-dessus des roues. Cependant, il est difficile de savoir où est la gravité du scooter. Donc, il faut relativement tenir le guidon en vertical.
Si on s’incline de l’avant quand on est à scooter, il accélérate à aller tout droit et si on s’incline de l’après, il accélérate à l’après. Si on veut s’arrêter, il se faut s’incline à l’opposite de direction du mouvement.
3.2 Équation d’état du modèle
Où:
Jthân : inertie du châssis (Nm2). Jbánh, JRL, JRR : inertie de la roue (Nm2).
En équilibre S’incline

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 6 PFIEV-IPHCM
Mthân, Mbánh : masse du châssis, masse de la roue (kg). R : rayon de la roue (m). D : distance entre deux roues (m). L : distance entre la base du châssis et le centre de gravité du
châssis (m). θ : angle (rad). δ : vitesse de rotation (rad).
• En fin, on a des équations d’état:
XCY
XgM thân θθθ ⋅
−=..
[3–1]
θθ CLMX
LYgX
gMLxthân
thânbánhTB ⎟⎟
⎠
⎞⎜⎜⎝
⎛−+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛+−=
134
34..
[3–2]
θ
θθ
θθ
C
XY
LMXLY
xx
XgM
XMLg
xx
thânbánh
bánh
thân
thân
bánh
bánh
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
⎟⎟⎠
⎞⎜⎜⎝
⎛−
+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
=
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
0
134
0
0001000
034100
0010
.
.
..
.
..
.
[3–3]
θ
θθθ
Cxx
x bánh
bánh
bánh⎥⎦
⎤⎢⎣
⎡+
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡00
01000001
.
.
[3–4]
3.3 Mise en ouvre le régulateur en MatLAB
Placement des pôles par retour d’état: le régulateur est une commande par retour d’état, appliqué au système d’état, quatre variables d’état, un système d’entrée.
LCommande par retour d’état
mbánh = 7kg; Mthân = 90kg; R = 0.2m; L = 1m

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 7 PFIEV-IPHCM
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡−
=
03290.1900100009620.15000010
A ; ⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
=
1653.00
0.20370
B [3–5]
Le système est monovariable, mai il est commandable ? On utilise sur MatLAB: ctrb
>>P = ctrb(A,B)) <enter>
P =⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−−−−
01942.301653.01942.301653.0005935.202037.0
5935.202037.00
[3–6]
>>det(P) <enter> ans =0.1701
|P| ≠ 0 commandable La commande sera facile ? >>cond(P) <enter> ans =80.251 la difficulté de commande est faible Les pôles du système: >>damp(A) <enter>
Eigenvalue Damping Freq. (rad/sec)
4.3965 -1.0000 4.39
0 -1.0000 0
0 -1.0000 0
- 4.3965 1.0000 4.39
Parce qu’il ont des pôles positifs et des pôles zéros instable. Donc, on doit
établir un régulateur pour avoir des nouveaux pôles stables utiliser la commade acker sur MatLAB pour avoir le vecteur de gain soit un matrice de satabilité A’=A-BK (équation Ackermann).
>>K = acker(A,B,V) <enter> t=0:0.1:10; sysCL=ss(A-B*K,zeros(4,1),C,D);[y,t,X]=initial(sysCL,[0 0.01 0 0],t); Résultat en MatLAB (ne limite pas la valeur de couple du moteur).

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 8 PFIEV-IPHCM
Le résultat des calculs: a) Choisir le pôle V = [-0.7-j;-0.7+j;-8.2+3*j;-8.2-3*j]
K = [-87.4505 -100.9797 -834.0498 -232.1682]
b) Choisir le pôle V = [-2 – i; -2 + i; -5.4 + 3i; -5.4 - 3i]
K = [-146.8829 -159.0770 -820.5842 -285.6180]
c) Choisir le pôle V = [-0.5–i; -0.5+i; -5.4+3i; -5.4-3i]
K = [-36.7207 -39.7692 -466.0578 -120.4199]

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 9 PFIEV-IPHCM
d) Choisir le pôle V = [-3.6; -3.6; -3.6+3i; -3.6-3i]
K = [-219.0939 -193.5529 -912.0032 -325.6883].
On choisit le troisième vecteur de pôles V, parce que le gain n’est pas plus
grand, dont on peut facilement commander le scooter en pilotage les moteurs à courant continu (les valeurs de modulation de langeur d’impulsions (MLI)) dans chaque moteur ne changeront pas plus larges, et c’assurer le fonctionnement de la carte de puissance de MOSFET. En revanche, modèle est robust à plus longtemps (7 secondes).
Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 10 PFIEV-IPHCM
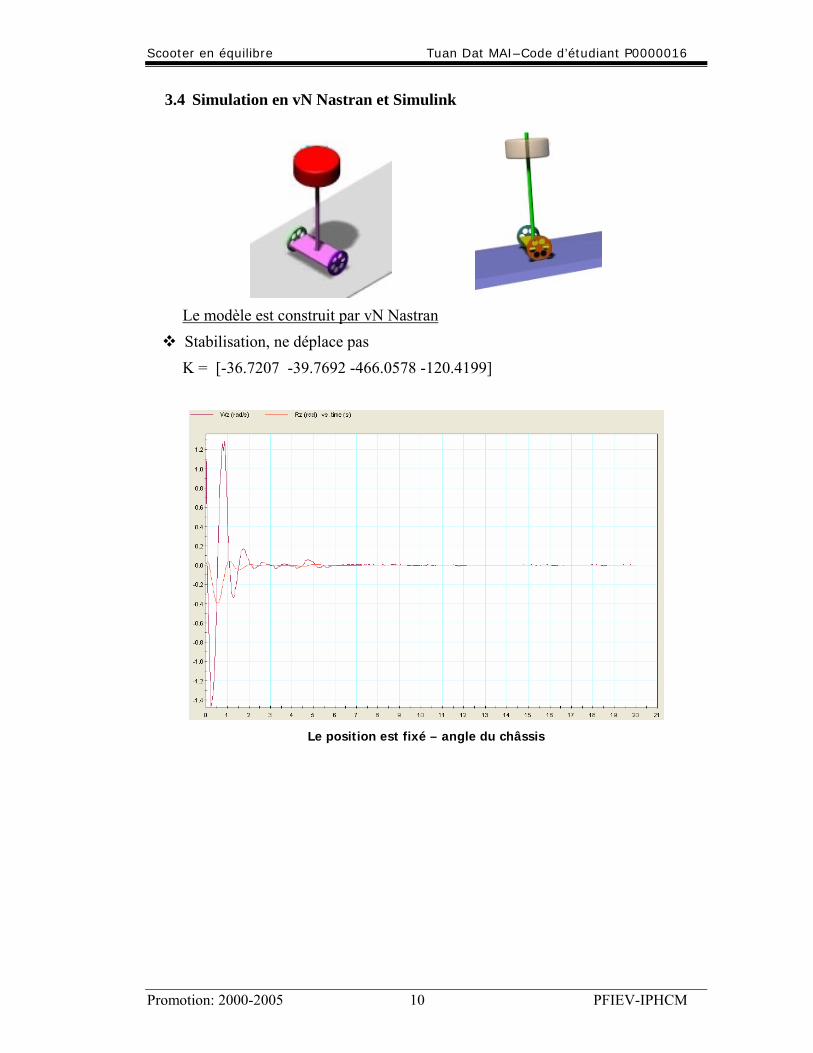
3.4 Simulation en vN Nastran et Simulink
Le modèle est construit par vN Nastran
Stabilisation, ne déplace pas K = [-36.7207 -39.7692 -466.0578 -120.4199]
Le position est fixé – angle du châssis

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 11 PFIEV-IPHCM
Le position est fixé – position des roues
Remarque: le scooter en équilibre est rapidement stable (6 secondes), après il va à l’ancien position (pendant 10 secondes), dont l’homme qui untilise ce scooter ne sent pas incommodant.
Le modèle stablement va tout droit (régulateur PD de l’ angle et régulateur P de la vitesse) , K = [0 -39.7692 -466.0578 -120.4199]
Le modèle va tout droit – angle du châssis

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 12 PFIEV-IPHCM
Le modèle va tout droit – position des roues
Remarque: le scooter en équilibre est rapidement stable (2 secondes) et la vitesse du modèle est constante aussi.
3.5 Filtre de Kalman Introduction : Proposé par Proffeseur Kalman en 1960, les filtres de Kalman introduisent la
notion de prédiction: prédire l'instant n×t, alors qu'on ne connait que l'instant k×t (avec k < n). Ils describent un solution récursif pour résourde le problème des filtres des discretes ‘data’ donées linéaires. Les filtres de Kalman sont un ensemble des équations mathématiques lesquels founir et estiment le state de process précis: dans le passé, le présente et le futur quand la nature précise du système n’est pas savu par l’estimation de manière optimale, le vecteur d'état x(n) connaissant les mesures ( u(0), u(1),...,u(n) ), les filtres de Kalman réduits et efficaces pour l'assimilation de temps données pour améliorer les performances de nos filtres dans les périodes instables du modèle.
Le filtre de Kalman permet: • Les mesures sont imprécises/incertaines. • Le modèle est simpliste. • On veut savoir la fiabilité d’une estimation si de l’état courant si.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 13 PFIEV-IPHCM
Avant le processus du filtre de Kalman
Apres le processus du filtre de Kalman
Dans le cas général du filtre de Kalman, on cherche à minimiser la trace de matrice de covariance du vecteur d'état xk engendré par l'équation de commande.
, x ∈ ℜn [3–7]
, z ∈ ℜm [3–8] wk,vk sont les bruits blancs additifs et:
[3–9]
[3–10] Q : la covariance du bruit R : la covariance du mesurement Filtrage de Kalman: processus itératif d’estimation du vecteur. Estimation à l’instant k:

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 14 PFIEV-IPHCM
[3–11] Pk traduit la confiance que l’on a en l’estimation.
[3–12]
Si on connaît 1−
∧
kx , la meilleure estimation possible de −∧
kx est:
[3–13]
Processus du filtre de Kalman discrete
On a des équation d’état en Discrete Kalman:
[3–14]
[3–15]
[3–16]
[3–17]
[3–18] Filtres de Kalman itérés:
• Globalement. • Localement.
Objectif: limiter l’influence des linéarisations.
Applications:
− Suivi de la trajectoire d’une particule dans le plan.
− Estimation des paramètres d’une ellipse à partir d’un nuage de points.
Time Update (“Predict”)
Mesurement Update (“Correct”)

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 15 PFIEV-IPHCM
− Suivi des paramètres externes d’une caméra en trou d’épingle.
Le processus du filtre de Kalman
L’algorithme du filtre de Kalman sur microcontrôleur PIC18F452:
Le capteur de l’angle est l’intérgration du gyro et de l’accéléromètre. Les signaux de deux capteurs sont intégrés par le filtre de Kalman. Le filtre a 2 états: l’angle et le gyro_bias: biaisé.
Gyro_bias est automatiquement réglé par le filtre. Il est très difficile pour programmer le filtre de Kalman à un microcontrôleur. J’ai trouvé ce code source dans le site www.rotomotion.com et l’explique dans ce page.
Il faut intégrer à partir de l’initialisation X et P
⎥⎦
⎤⎢⎣
⎡=
1001
initP [3–19]
float angle; float q_bias; float rate;
R_angle est la covariance du bruit de mesure R_angle = 0.03;
Q est une matrice 2x2, est la covariance du bruit de commande. Dans ce cas,
elle représente la confidance de l’accéléromètre au gyro.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 16 PFIEV-IPHCM
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡=
003.000001.0
_00_gyroQ
angleQQ [3–20]
State_update()
State_update est fonctionné chaque la période dt.
Vecteur d’état: ⎥⎦
⎤⎢⎣
⎡=
biasgyroangle
X_
[3–21]
La représentation d’état de ce filtre
⎥⎦
⎤⎢⎣
⎡ −=
⎥⎥⎦
⎤
⎢⎢⎣
⎡= •
••
0_
_
biasgyrogyro
biasgyro
angleX [3–22]
La covariance de l’erreur d’estimation P(t) obéit à l’équation différentielle
Pdot = A*P + P*A' + Q
QAPPAP +⋅+⋅=•
' [3–23]
A est le Jacobian du Xdot:
( ) ( )
( ) ( )
⎥⎦
⎤⎢⎣
⎡ −=
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛
= ••
••
0010
_
__
_
biasgyrod
biasgyrod
angled
biasgyrod
biasgyrod
angled
angled
angled
A [3–24]
À raison de la capacité des microcontrôleurs, il faut avoir quelque calculs pour
optimiser le filtre de Kalman;
⎥⎦
⎤⎢⎣
⎡−
−−−=
•
gyroQPPPPangleQ
P_]1][1[
]1][1[]0][1[]1][0[_=
= ⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ −gyroQ
angleQPPPP
PPPP
_00_
0100
]1][1[]0][1[]1][0[]0][0[
]1][1[]0][1[]1][0[]0][0[
0010

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 17 PFIEV-IPHCM
= ⎥⎦
⎤⎢⎣
⎡+⎥
⎦
⎤⎢⎣
⎡−−
+⎥⎦
⎤⎢⎣
⎡ −−gyroQ
angleQPPPP
_00_
0]1][1[0]1][0[
00]1][1[]0][1[
[3-25]
Nous obtenons la vitesse de rotation rate=q = q_m - q_bias [3–26]
Obtenir le nouveau valeur de l’angle
dtratedtangleangle ⋅=⋅=•
[3–27]
Mise à jour de la matrice de covariance de l'état
dtPPP ⋅+=•
= dtgyroQP
PPPangleQPPPP
⎥⎦
⎤⎢⎣
⎡−
−−−+⎥
⎦
⎤⎢⎣
⎡_]1][1[
]1][1[]0][1[]1][0[_]1][1[]0][1[]1][0[]0][0[
[3–28]
Kalman_update() Kalman_update est fonctionné si on veut. C’est une matrice 1x2, c’est la matrice Jacobian de mesure.
[ ]01)_(
)_()(
)_(=⎥
⎦
⎤⎢⎣
⎡=
biasgyrodmangled
angledmangledC [3–29]
error est la différence entre le mesure et l’estimation de la sortie.
Angle_error=angle_m – angle [3–30]
L’eurreur d’estimation:
[ ] RPRPPPP
RCPCE T +=+⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡=+= ]0][0[
01
]1][1[]0][1[]1][0[]0][0[
01 [3–31]
PCt_0= C[0]*P[0][0] [3–32] PCt_1= C[0]*P[1][0] [3–33]
Calcul du gain du filtre optimal:

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 18 PFIEV-IPHCM
⎥⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡EPCtEPCt
KK
/0_/0_
10
[3–34]
( ) KCPPKHPPPKHIP −=−=−= [3–35]
[ ] [ ] [ ]1_0_]1][0[]0][0[]1][1[]0][1[]1][0[]0][0[
01 ttPPPPPP
CP ==⎥⎦
⎤⎢⎣
⎡= [3–36]
Matrice de covariance de l’erreur d’estimation
[ ] ⎥⎦
⎤⎢⎣
⎡⋅⋅⋅⋅
−=⎥⎦
⎤⎢⎣
⎡−⎥
⎦
⎤⎢⎣
⎡=
1_10_11_00_0
1_0_10
]1][1[]0][1[]1][0[]0][0[
tKtKtKtK
PttKK
PPPP
P [3–37]
Réactualisation de l'estimation de l'état
⎥⎦
⎤⎢⎣
⎡+=−+=⎥
⎦
⎤⎢⎣
⎡=
errangleerrangle
KXHXZKXbiasgyro
angleX estimatemeasure _
_)(
_ [3–38]
angle_err=q_bias_err [3–39]
Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 19 PFIEV-IPHCM
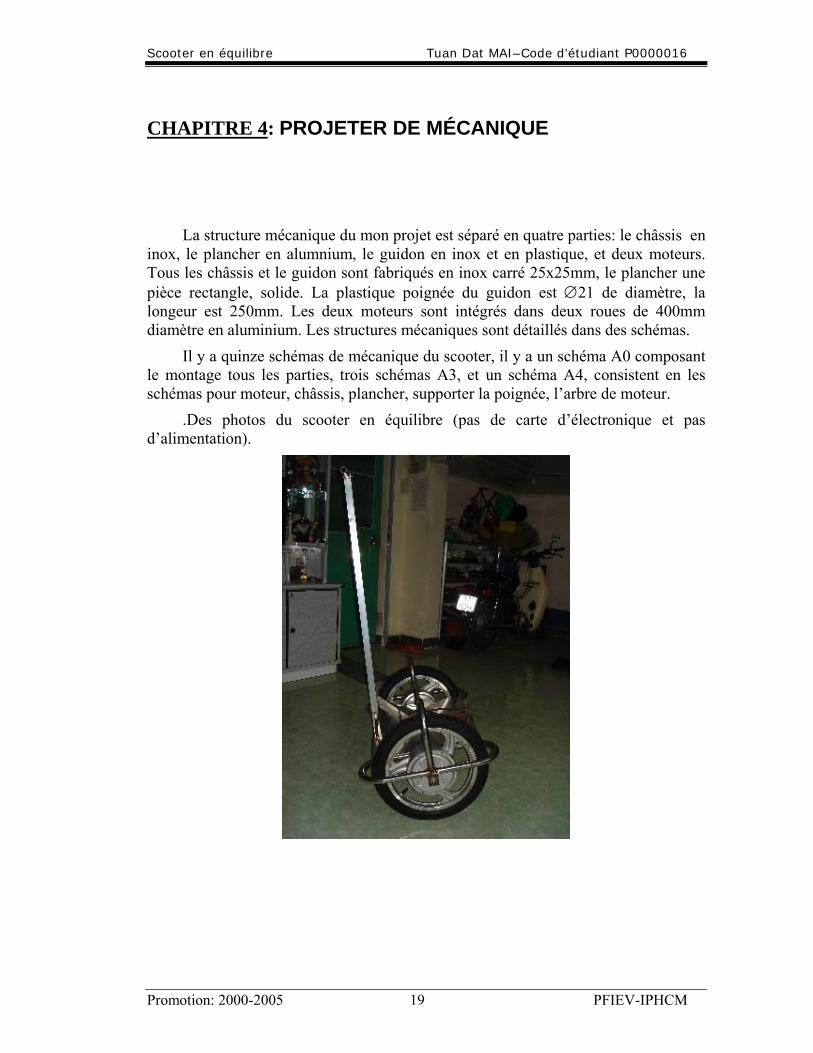
CHAPITRE 4: PROJETER DE MÉCANIQUE La structure mécanique du mon projet est séparé en quatre parties: le châssis en
inox, le plancher en alumnium, le guidon en inox et en plastique, et deux moteurs. Tous les châssis et le guidon sont fabriqués en inox carré 25x25mm, le plancher une pièce rectangle, solide. La plastique poignée du guidon est ∅21 de diamètre, la longeur est 250mm. Les deux moteurs sont intégrés dans deux roues de 400mm diamètre en aluminium. Les structures mécaniques sont détaillés dans des schémas.
Il y a quinze schémas de mécanique du scooter, il y a un schéma A0 composant le montage tous les parties, trois schémas A3, et un schéma A4, consistent en les schémas pour moteur, châssis, plancher, supporter la poignée, l’arbre de moteur.
.Des photos du scooter en équilibre (pas de carte d’électronique et pas d’alimentation).

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 20 PFIEV-IPHCM
Plan de motage

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 21 PFIEV-IPHCM

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 22 PFIEV-IPHCM
CHAPITRE 5: LE PILOTAGE
5.1 Schéma bloc du système
Microcontrolleur
PIC 18F452
Gyro Accelerometer
Driver MOSFET 1 Driver MOSFET 2
MOSFET puissance 1 MOSFET puissance 2
Moteur 1 Moteur 2
Codeurincreùmental 1
Codeurincreùmental 2
Sens
de
cour
ant 1
Sens
de
cour
ant 2
Reùsistance variable+ contacteur LED
5.2 Alimentation
12V D3 luc
MOSFET driv er power
CON4
1234
D4 do
12V
D1
1N40070V
0V
36V
R1
1K
R2 1KD2
1N4007
36V
BT312V 7Ah
BT212V 7Ah
S1
P power
S2
N power
24V
BT112V 7Ah
24V
Montage des accus et l’alimentation pour le driver MOSFET et les deux moteurs

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 23 PFIEV-IPHCM
BT412V - 1.2Ah
J4
Board trung tam
12
D10
1N4007S6
Cong tac nguon MCU v a MOSFET thang(brake)
D11
1N4007
D9
1N4007
J5
2 MOSFET thang
123
L’alimentation des freins MOSFETs et du microcontrôleur
Nguon 6-12V
HEADER 2/SM
12
D1
1N4007
2 1
VCC
VSS
C181nF
C17100nF
Nguon so capJP30
HEADER 2
12
L3 470uH
C19470uF
C16
1000uFC154.7u
U3LM7805
1
2
3VIN
GN
D
VOUTNgo ra
Alimentation +5V pour le microcontrôlleur et les cartes de capteurs, intégré dans la
carte principale
5.3 Le circuit d’attaque MOSFET ( le driver)
C'est une carte qui permet le pilotage en haute fréquence du circuit du pont en H MOSFET, sous des tensions pouvant atteindre 60V, en garantissant l'isolation électrique de chaque étage.
Caracteristique du circuit d’attaque MOSFET:
Cgs parasite ~ Ciss pour IRFP140 est 1400ρF.
faut charge pour Vth ⇒ ON.
ΔQg somme charge pour G ⇒ ON pour IRFP140 est 97nC
tf: le temps tombée VDS (Δt) pour IRFP140 est 20ns
ΔQg < 97nC pour IRFP140
Δt ~ 50ns pour IRFP140
tQ
dtdqi(t)
ΔΔ
≈= [5–1]
94.150ns97nCi(t) == pour 50nsecond [5–2]
fall
gs
tV
dtdvrate slew
Δ
Δ≈= [5–3]
ΔVgs max ≈ 12V

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 24 PFIEV-IPHCM
sμ V240
50ns12Vrate slew == [5–4]
R5 1K
+5V
C4470uF/16V
+12V
R2022ohm/1W
R15
1K
C322n
R14
1K
Q4BD140
+24V
OC4
Q6bd139
R16
1K
J2
POWER
1234
+36V
Q2
BD140
OC4
R1
470ohm
R710K
C9
332
N2
N2
GP
1
R810K
R17
22ohm/1W
R13
1K
U1
74HC157
115
4
7
9
12
2
5
11
14
3
6
10
13
SELEN
1Y
2Y
3Y
4Y
1A
2A
3A
4A
1B
2B
3B
4B
+12V
C11000uF/25V
R3
470ohm
Q5bd139
R19
22ohm/1W
Q1
BD140
+12V
+24V
R18 22ohm/1W
R10 1K
J1
PWM in
123456
C5100n
P1
OC1
OC3
+36V
N1
J3
Gate PNNP
1 2 3 4
GN
1
D2
1N4001
21
DZ3
Zener 15V
12
+12V
N1
OC3
U0C3
OPTO TLP 351
34
8
15
2 6
7CATHODE
4
VCC
1GND
ANODE Vout
7
GP
2
Brake/ Float H bridge
Xai chung brake/ Inactiv e H bridge
12
OC2
�
+ISO2
H11L1+24V
+24V
OC2
P2
R12
220ohm
C8 332
P2
DZ1
Zener 15V
12
R4
470ohm
R11
220ohm
Q3BD140
+12V
+36V
GN
2
Q7bd139
C21000uF/25V
C6 332
R9 1K
R2
470ohm
DZ2
Zener 15V
12
OC1
P1
+24V
+36V
BRAKE signal
Brake
1 2
+5V
DZ4
Zener 15V
12
UOC2
OPTO TLP 351
34
8
15
2 6
7CATHODE
4
VCC
1GND
ANODE Vout
7
�
+ISO1
H11L1
Q8 bd139
+36V
C7332
Le driver MOSFET
Étage de sortie basse, type de push-pull BD139-BD140.
Canal bas pour MOSFET N. Vdd 12V. N’invertir pas 0V~+12V. 25mV saturation. Iout 3A . fmax < 6MHz.
Étage de sortie haute, type de push-pull BD139-BD140. Canal haut pour MOSFET P. Vgate ~ Vsource +24V ~ +36V. < 24V. Iout 3A. fmax < 6MHz.
Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 25 PFIEV-IPHCM
Les entrées du connecteur J1 sont des entrées logiques, compatibles CMOS et TTL LS. J1 inclut les signaux: V+5V, masse, MLI, direction, inactive et le frein électromécanique.
L’étage dispose d'une sortie pouvant délivrer un courant de 3A par l'intermédiaire du push-pull BD139-BD140. Cette technique est largement utilisée en amplification audio de part sa faible émission en bruit. L’amplification de cet étage est de 1 en tension mais de hFE en courant. Ces transistors ont un fonctionnement complémentaire. Les niveaux de basculement sont liés à la valeur de la tension d'alimentation. Par exemple, pour VDD=24-36V, le niveau haut est compris entre 24V et
36V.
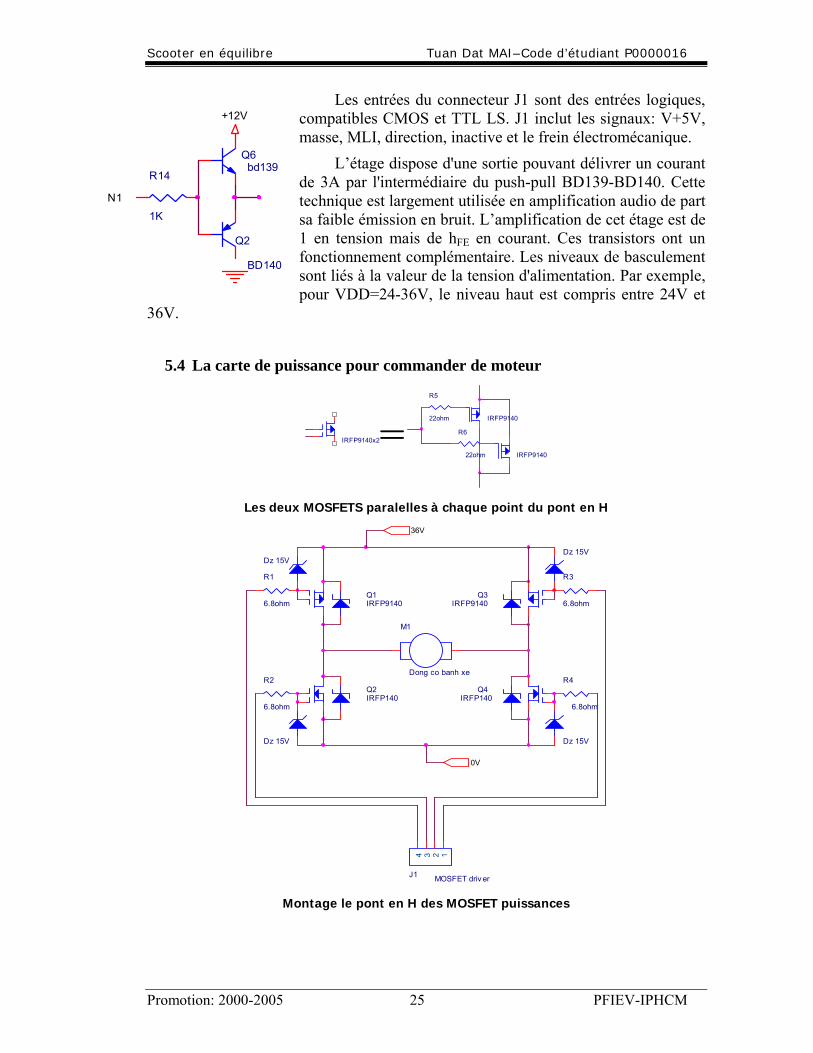
5.4 La carte de puissance pour commander de moteur
IRFP9140x2
IRFP9140
R5
22ohm= R6
22ohm IRFP9140
Les deux MOSFETS paralelles à chaque point du pont en H
Dz 15V
R2
6.8ohm
Q1IRFP9140
Q4IRFP140
J1 MOSFET driv er
1234
R4
6.8ohm
36V
0V
Q3IRFP9140
R3
6.8ohm
Dz 15V
Q2IRFP140
M1
Dong co banh xe
Dz 15V
Dz 15V
R1
6.8ohm
Montage le pont en H des MOSFET puissances
Q6bd139
Q2
BD140
N1
+12V
R14
1K

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 26 PFIEV-IPHCM
La tension d’alimentation pour pilotage de la puissance du moteur est 36V, le courant normal est 5-10A, le courant maximal est 30A, conduire la vitesse de moteur en fréquence MLI est 9.7665KHz, la résolution du MLI est 10 bits chaque direction. La vitesse du frein pour renverser est de 100ms à 250ms, dépendre du valeur moyenne de l’énergie commandée par le signal MLI.
Les MOSFETs ont un fonctionnement complementaire. VGS sont assurés être comprise en ±15V par monter diode zener parallèle de la grille et de la source, donc, la tension VGS est plus petite que VGS max. Mais, ils diminuent la haut résistance de la grille du MOSFET.
L’application est à la région de saturation. Quand la polarisation est à la région de saturation, l’E-MOSFET égale le résistant minimal.
12V thang
M2
R26
22ohm/1W
J8
Tin hieu brake
12
C14
152
PGND
R27 470ohm
PGND
Q10BD140
R2410ohm/30W
Q Power
IRF140
DZ brake1
DZ15
12
J7
12V brake
1 2
Opto cua brake
OPTO TLP 351
34
8
15
26
7 CATHODE4
VCC
1GND
ANODEVout
7
R25
1K
P+36VQ11
BD139- +
D1
BRIDGE
2
1
3
4
M1
Montage de circuit d’électronique du frein MOSFET
5.5 Le snubber
Snub
ber
2
D5
5A
1 2
R622ohm/5W
Snub
ber
3
D3
5A
1 2
C10224/400V
Snu
bber
4
R22100ohm/10W
J4
Power
12
C12224/400V
O
C11224/400V J5
Motor
12
R23100ohm/10W
Snu
bber
1
D6
5A
12
C13224/400V
R2122ohm/5W
M1
D4
5A
12
+36
M2
Pour balayer le vibration de tension de MOSFET puissance
quand il marche comme un source découplée

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 27 PFIEV-IPHCM
5.6 La carte des capteurs D28
LED
1 2
+5V sensor
Tilt CON
CON8
12345678
C7470uF
Analog Y
Sef t test
C13100uF
C31nF
C4
4.7uF
Gy ro PS
JUMPER2
+
-
U1B
LM324
5
67
411
Y out
R6
R-VAR
R5R
C62.2uF
R361K
+5VDC sensor Tilt PS
JUMPER2
L1470uH
J6
CON4
1234
R35
1K+ C dc47 uF
CYX f ilt
C2 in0.1uF
U2LM7805
1
2
3VIN
GN
D
VOUT
R8
R-VAR
J4
Sensor Power supply
12
GND
Gy ro 2
CG16
1
3
2
4
V ref
Vcc
GND
Out
C12
C
+
-
U1A
LM324
3
21
411
GND
R set125K
D29xanh 12
C1 in470uF
Analog X
Y out
L2INDUCTOR
TILT sensor
MMA2260D
1234567
141312111098
C10
C
C11
C
C14
100nF
J3
VCC in
12
R4
R
Analog X
Gy ro 1
CG16
1
3
2
4
V ref
Vcc
GND
Out
+5V sensor
C8100nF
none
X outAnalog Y
+5V sensor
C5
4.7uF
CXY f ilt
X out
R9
R-VAR
+5VDC sensor
C9
C
+5VDC sensor
R7
R-VAR
Sef t test
La carte des capteurs: l’ accelérometre et les gyros
Le capteur mesure deux type de l’inclinomètre. Le gyro mesure la vitesse de l’angle, et l’accéléromètre mesure l’angle d’immobile. La valeur de l’accéléromètre est très exacte, mais le temps de réponse n’est pas rapid. Donc, le gyroscope est utilisé parce qu’il compense le temps lent de réponse.
Mon scooter a utilisé le gyroscope, Murata ENC-03, et l’accéléromètre, ADXL202 au dispositif d’analogue. Puis, on applique l’algorithme du fitre de Kalman pour avoir exactement l’angle et la vitesse de l’angle.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 28 PFIEV-IPHCM
Accélérometre ADXL202 mesure l’angle associé au vecteur de gravité
et le gyro ENC-03
-60
-40
-20
0
20
40
60
80
100
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99
Tích phân giá trị gyro
Kalman
Accelerometer
Le signal de l’angle du gyro et de l’accélérometre et le signal traité par le fitre Kalman

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 29 PFIEV-IPHCM
-300
-250
-200
-150
-100
-50
0
50
100
150
1 8 15 22 29 36 43 50 57 64 71 78 85 92 99
Gyro mới (1.5+2.5)*3=12ms
Kalman
Accelerometer
Le signal de rotation de l’angle du gyro et de l’accélérometre et le signal traité par le
fitre Kalman
5.7 Les deux codeurs incrémentales
5.8 Le résistance SHUNT pour mésurer le courant d’électrique traverse à moteur
Un codeur avec 120 impulse

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 30 PFIEV-IPHCM
J3
Nguon cho banh xe phai
12
S4
Cong tac 15A
0V
J2
Nguon cho banh xe trai
12
0V cua MCU
D8 2V7
D5 do
R510K
R3
0.11ohm 20W0V
R7100ohm
+ C19600uF/50V
+ C29600uF/50V
0V cua MCU
D6 xanh
R610K
R4
0.11ohm 20W
R8100ohm
ISO1
P621
36VD7 2V7
Do qua dong dien banh phai
S3
Cong tac 15A
Do qua dong dien banh trai
36V
ISO2
P621
La carte de surcharge de courant d’électrique traversé les deux moteurs
Les deux résistances SHUNT sont utilisés pour repérer le courant surchargé
électrique traversé chaque de deux ponts H MOSFETs, et envoyer le signal à micro contrôleur pour assurer que le système est pas en pain.
RshuntoptoON VVVV −== 1 [5-5] RIVV shuntoptoON ⋅−= [5-6]
RIVVIR optoONshuntmotorshunt ⋅+==⋅ [5-7]
AR
RIVI
shunt
optoONmotor 30
1.010002.01
=⋅+
=⋅+
= [5-8]
5.9 La carte principale Le chip pricipal que j’utilise dans mon projet est PIC 18F452. Le
microcontrôleur PIC 18F452 de l'écurie Microchip est un microcontrôleur 40 broches, hautes performances, à mémoire FLASH, avec les convertisseurs A/N 10 bits. Il est inséré un quartz 10 MHz. En effet les 18Fxxx intégre une PLL dans leur circuit d'horloge qui mulitplie la fréquence du quartz par 4. Ainsi un quartz à 10 MHz permet de cadencer le PIC à 40 MHz. Le 18F452 possède 32 Koctets de mémoire FLASH pour le programme, 1536 octets de RAM et 256 octets de mémoire EEPROM interne. Comme ses prédécesseurs, il intégre bon nombre de périphériques, comme deux modules CCP/PWM (qui servent à piloter les deux moteurs), 8 convertisseurs A/N 10 bits, I2C, USART, et une porte d’esclave parallèle. Il soit 33 lignes d'entrées/ sorties (E/S) en tout, dont certaines sur le port B peuvent générer des interruptions (cela nous sert par exemple à détecter des chocs).
Le shéma de la carte principale:

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 31 PFIEV-IPHCM
V+ REF
J9
Ov er Current 2
12
Encoder 2
U2C
74LS08
9
108
J3
CON Motor 1
123456
Forward
Y1 10MHZ
J8
Ov er Current 1
12
Inactiv e12
PWM1
VCC
+
C23
10uF
GND
U2B
74LS08
4
56
GND
MCLR
Inactiv e12
USART
SUB-D 9
594837261
+
C21
10uF
Encoder 2
Encoder 2
Encoder1
CON3
123
Inactiv e12
Ov er Curr 1
Ov er Curr 2
J4
CON Motor 2
123456
Brk2
C reset
10uF
V+ REF
Tilt
PGD
Dir1
VCC
Encoder2
CON3
123
U2A
74LS08
1
23
Brk2
VCC
Brake2
PGD
Control CON
CON41234
Brake1
+
C22
10uF
Ov er Curr 2
C133p
USART MCU
CON2
12
+
C20
10uF
GND
U4
MAX232
1345
16
15 26
129
1110
138
147
C1+C1-C2+C2-
VCC
GND V+V-
R1OUTR2OUT
T1INT2IN
R1INR2IN
T1OUTT2OUT
U2D
74LS08
12
1311
VCC
Turn
Gy ro
PGC
Brk1
R reset4K7
USART con
CON2
12
PIC16F452
U1
PIC16F877A_5
1
23
56789
10
11
12
1314
15161718
19202122
23242526 28
27
2930
31
32
3334353637383940
4
MCLR/VPP
RA0/AN0RA1/AN1
RA3/AN3/VREF+RA4/TOCKIRA5/AN4/SSRE0/RD/AN5RE1/WR/AN6RE2/CS/AN7
VDD
VSS
OSC1/CLKINOSC2/CLKOUT/RA6
RC0/T1OSO/T1CKIRC1/T1OSI/CCP2*RC2/CCP1RC3/SCK/SCL
RD0/PSP0RD1/PSP1RD2/PSP2RD3/PSP3
RC4/SDI/SDARC5/SD0RC6/TX/CKRC7/RX/DT RD5/PSP5
RD4/PSP4
RD6/PSP6RD7/PSP7
VSS
VDD
RB0/INT0RB1/INT1RB2/INT2
RB3/CCP2*RB4
RB5/PGMRB6/PGCRB7/PGD
RA2/AN2
+ C RS23247uF
VCC GND
Gy ro
PGC
C233p
Inactiv e12
Encoder 1
J5
LED con
12345678
Emergency SW
Brk1
PWM2
Emergency SW
Dir2
C encoder2100uF
MCLR C encoder1100uF
ICSP
CON6
123456
VCC
Tilt
PGM
PGMDir1
GND
R OC11K
R OC21K
Sensor CON
CON41234
Brake1
VCC
Ov er Curr 1
PWM2
Turn Encoder 1
VCC
Inactiv e12
Dir2
PWM1VCC
SW1Reset BTN
Encoder 1Encoder AMP
CON2
12
Brake2
VCC
VCC
Forward
Le port A est utilisé comme quatre convertisseurs A/N pour recoit les
informations de différents capteurs: l’accéléromètre, le gyro, deux résisteurs variables accessible via les connecteurs.
Le port B est également des interrupteurs pour recoit les informations de capteurs optiques – codeurs optiques incrémentals (120 pulsations par tour), de courants maximals et de contacteur du circuit de commande.
Le port C a le module CCP/MLI, donc quatre broches du port C et trois broches du port E sont des signaux logiques pour piloter des cartes de motorsation. RC6, RC7 du port C sont l’interface de communication à l’ordinateur par USART.
Le port D est entièrement disponible, mais on peut de plus visualiser l'état de ses sorties via 8 leds interfacées par un ULN2003.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 32 PFIEV-IPHCM
5.10 Schéma bloc :
Programme principal
Start
Initialise les PortsPort B en entreùePort D en sortiePort C en sortie
Initialiser A/D
Inactiver le pont H
Initialiser le module MLITimer2
PWM1=PWM2 = 0
Delay 5s
DCPWM1 = 0DCPWM2 = 0
RE1 = 1
Activer les ponts H etles moteurs
Oui
AN0 -> AN4 Vref = AN3
PS 1:4 , PR2 = 0xFF
INT0=0 (contacteur)or AN4>0 Delay 1s
Initialiser les interruptsGIE, Timer0, Timer 1
BoutonRB0 = 0
Surcharger lecourant
d'eùlectrique
Alerter la faute deprocessus
Arreâter l'opeùrationde scooter
Oui
Non
Non
Oui
Alerter la faute de processusArreâter l'opeùration de scooter
Allumer PORTD
END
DCPWM1=0DCPWM2=0

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 33 PFIEV-IPHCM
Interruptions: Programme de traitement d’interruption prioritaire

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 34 PFIEV-IPHCM
Calcule la valeurde MLI
Torque =Ktheta*angle_k- angle deùsireux
+ Krate*rate_k + Kpos*pos + Kvel*vel
Vitesse = Vitesse +(Kinertie *inteùrgral du torque)
MLI geùneùral= vitesse + torque
RET
Commande ducontroleur
Angle deùsireux =Ñoïc AN2
Valeur tournant = afficher AN4/8 Angle tournant = 256 - valeur tournant
RET

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 35 PFIEV-IPHCM
Programme de traitement d’interruption non prioritaire
Encoder1INT1
Timer1
RETOUR
Encoder2INT2
Non
Non
Non
Encoder1
Encoder2
“.” flashRe afficher le position
Oui
Oui
Oui
Interruption nonprioritaire
RETOUR
V = Position - Position ancienPosition ancien = Position
Reafficher leposition
Position = (X1 + X2)/2
RB0=0
RET
X1=0X2=0
Oui
Non
Codeur 2
Direction 2 = 1 X2 =X2 -1
X2 =X2 +1
RETOUR
Oui
Oui
Codeur 1
Direction 1 = 1 X1 =X1 -1
X1 =X1 +1
RETOUR
Oui
Oui

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 36 PFIEV-IPHCM
Motorisation
PWM1 = PWM geùneùral + vitesse tournantPWM2 = PWM geùneùral - vitesse tournant
PWM1>= 0 PWM 1<1%Oui
Motoriasation
EÙùtat dudirection1 = 1
PWM1=0
PWM1>50%
PWM1=50%
Yes Yes
Non No
PWM1< 0 PWM1> -1%Oui EÙùtat dudirection1 = 0
PWM1=0
PWM1<-50%
PWM1=-50%
Oui Oui
Non Non
No
PWM2>= 0 PWM 2<1%Oui EÙùtat dudirection2 = 1
PWM2=0
PWM2>50%
PWM2=50%
Oui Oui
Non Non
PWM2< 0 PWM2> -1%Oui EÙùtat dudirection= 0
PWM2=0
PWM2<-50%
PWM2=-50%
Oui Oui
Non Non
Non
A

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 37 PFIEV-IPHCM
EÙùtat du direction 1 != Direction 1 moteurou
EÙùtat du direction 2 != Direction 2 moteur
Freiner les 2moteurs
A
DCPWM1=PWM1DCPWM2=PWM2
Delay 20ms
RET
Delay 20ms
DCPWM1=3%DCPWM2=3%
Non
Oui
Freiner les 2moteurs
DCPWM1=0DCPWM2=0
Delay 20ms
Direction 1 moteur = EÙùtat du direction 1Direction 2 moteur =EÙùtat du direction 2
RET
^LED RD5

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 38 PFIEV-IPHCM
CHAPITRE 6 CONCLUSION
6.1 Les résultats ont obtenu
− Construire un scooter en équilibre.
− Les calculs pour avoir les équation d’état du modèle, puis avoir le vecteur de gain de la commande par retour d’état.
− Le silmulation du modèle par vN Nastran et MatLAB-SIMULINK.
− Les carte de pilotage des moteurs du scooter: Le montage de la haut puissance
de MOSFET est 30–60A, la valeur de tension est de 12V à 60V.
Le montage des capteurs des accélération et gyro.
La carte principale: PIC 18F452.
− Le code source du microcontrôleur.
− Communication d’USART entre le PIC et l’ordinateur pour calibrer les capteurs.
− Le logiciel pilotage du PIC18F452 commande les opérations du scooter en équilibre.
− Le modèle est capable d’équilibre sur deux roues, d’aller doit et rotation.
6.2 Les résultats n’ont pas obtenu
− L’équilibre du scooter est relativement faible.
− Quand on vire à gauche ou à droite, il y a quelque difficulté pour pilotage.
6.3 Le développement
− Communication entre le PIC du scooter et l’ordinateur pour le scooter.
− Designer la communication de circuit du pilotage plus simple en mouvement.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 39 PFIEV-IPHCM
− Augmenter le charge du scooter, environ 100kg, donc il faut augmenter la puissance de MOSFET.
− Diminuer le poids du scooter en changement le châssis en inox en châssis en carbone ou matériaux synthétiques.
− Changer le moteur des roues de moteurs balais aux moteurs à courant continu sans balais.
− Améliorer la capacité du frein préssé.
− Améliorer le stabilité et perfectionner les cartes de puissances pour assurer le fontionnement de la MOSFET puissance quand le moteur change la direction de rotation à la grande vitesse.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 40 PFIEV-IPHCM
BIBLIOGRAPHIE
Documents vietnamiens [1]. Dương Minh Trí, Sơ đồ chân linh kiện bán dẫn, Nhà xuất bản khoa học và
kỹ thuật ( tái bản lần 4), 1998, trang 51,357,371.
[2]. Jean-Marie BRÉBEC, Cơ học vật rắn, HACHETTE Supérieur – PFIEV - Nhà xuất bản Giáo dục, 2001.
[3]. Ngô Diên Tập, Đo lường và điều khiển bằng máy tính, Nhà xuất bản khoa
học và kỹ thuật, 1997, trang 19. [4]. Nguyễn Hữu Lộc (cb) và cộng sự, Cơ sở thiết kế máy (phần 1), Trường Đại
học Bách Khoa Tp.Hồ Chí Minh, 1999, trang 302. [5]. Nguyễn Văn Đạo, Stability of Dynamic systems, Nhà xuất bản Đại học quốc
gia tại Hà Nội, 1998, trang 103. [6]. Trịnh Chất- Lê Văn Uyển, Thiết kế hệ dẫn động cơ khí, Nhà xuất bản Giáo
dục, 2003. [7]. Nguyễn Anh Kiệt, Nguyễn Minh Trung, Luận văn tốt nghiệp “Nhận dạng
và bám đối tượng bằng hai camera số”, PFIEV Bộ môn Cơ điện tử, Trường Đại học Bách Khoa Hồ Chí Minh, 2004, trang 62.
Documents francais et anglais
[8]. Georges ASCH et al., Acquisition de données du capteur à l’ordinateur, DUNOD, 1999, p. 330.
[9]. J.BLOT, Les transistors, DUNOD, 1995, p. 51-57. [10]. Max GIODANO et Jaques LOTTIN, Cours de Robotique – Description et
fonctionnement des robots industriels, Armand Colin Éditeur, 1990, p. 68,69,82,83.
[11]. Philippe de LARMINAT, Automatique commande des systèmes linéaires
(2e edition revue et augmentée), HERMES Science Éditeur, 2000, p. 167-211.
[12]. Albert Paul MALVINO, Ph.D, E.E (1999), Electronic principles, Glencoe
Mc Graw–Hill, ( tái bản lần 6), 2001, p. 468-473.

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 41 PFIEV-IPHCM
[13]. William D.STANLEY, Bộ khuyếch đại xử lý và IC tuyến tính, Nhà xuất bản khoa học và kỹ thuật, 1990, p. 143.
[14]. Ashish TEWARI, Modern Control Design, Indian Institute of Technology
Kanpur, India. John Wiley and sons LTD., 2003, p.219-236, 325-361. [15]. Greg WELCH and Gary BISHOP, An Introduction to the Kalman Filter,
University of North Carolina at Chapel Hill, 2004, p.1-16. Websites
[16]. http://www.geology.smu.edu/~dpa-www/robo/nbot/index.html [17]. http://www.tlb.org/scooter.html [18]. http://leiwww.epfl.ch/joe [19]. http://www.elex.camosun.bc.ca/Projects/2004/hvt/hvt.htm [20]. http://www.fusionglobal.net/gallery.htm [21]. http://www.barello.net/robots/gyrobot [22]. http://www.microchip.com [23]. http:// www.rotomotion.com [24]. http://www.dprg.org/projects/index.html [25]. http://autopilot.sourceforge.net [26]. http://www.wulabs.org/bbot.html [27]. http://homepage.mac.com/sigfpe/Robotics/equibot.html [28]. http://web.mit.edu/sanghyuk/www/balance_bot.html [29]. http://home.earthlink.net/~botronics/index/balibot.html [30]. http://www.analog.com/Analog_Root/productPage/productHome/adxl202,0
0.html [31]. http://murata.com/enc-03 [32]. http://www.picotech.com/applications/pwm-drivers/ [33]. http://www.segway.com [34]. http://www.ee.usyd.edu.au/tutorials_online/matlab/examples/pend/invpen.h
tm

Scooter en équilibre Tuan Dat MAI–Code d’étudiant P0000016
Promotion: 2000-2005 42 PFIEV-IPHCM
TABLE DES MATIÈRES
CHAPITRE 1: INTRODUCTION.................................................................................1
CHAPITRE 2: L’OBJECTIF .......................................................................................3
CHAPITRE 3: MISE EN ŒURVE...............................................................................5
3.1 Mise en œuvre d’un scooter en équilibre.................................................................................................. 5
3.2 Équation d’état du modèle ......................................................................................................................... 5
3.3 Mise en ouvre le régulateur en MatLAB ................................................................................................. 6
3.4 Simulation en vN Nastran et Simulink ................................................................................................... 10
3.5 Filtre de Kalman........................................................................................................................................ 12
CHAPITRE 4: PROJETER DE MÉCANIQUE..........................................................19
CHAPITRE 5: LE PILOTAGE ..................................................................................22
5.1 Schéma bloc du système............................................................................................................................ 22
5.2 Alimentation............................................................................................................................................... 22
5.3 Le circuit d’attaque MOSFET ( le driver) ............................................................................................. 23
5.4 La carte de puissance pour commander de moteur .............................................................................. 25
5.5 Le snubber.................................................................................................................................................. 26
5.6 La carte des capteurs ................................................................................................................................ 27
5.7 Les deux codeurs incrémentales .............................................................................................................. 29
5.8 Le résistance SHUNT pour mésurer le courant d’électrique traverse à moteur............................... 29
5.9 La carte principale .................................................................................................................................... 30
5.10 Schéma bloc : ........................................................................................................................................ 32
CHAPITRE 6: CONCLUSION..................................................................................38