chapter 1 basic concepts on planning and scheduling
TRANSCRIPT

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 1 Planning and Scheduling, FEUP/PRODEI /MIEIC 1
Eugénio Oliveira
CHAPTER 1
Basic Concepts on Planning and Scheduling
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 2 Planning and Scheduling, FEUP/PRODEI /MIEIC 2
Methods for Planning and Scheduling
Planning and Scheduling: Processes of “Decision Making” regarding the and ordering of activities as well as the optimization of limited resources used for executing them in production environments (including services)
Planning and Scheduling Processes are based in techniques and methods: mathematical heuristic

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 3 Planning and Scheduling, FEUP/PRODEI /MIEIC 3
Planning and Scheduling: Are of great importance for large projects/works that encompass many tasks and goals involving some kind of restrictions (either mutual or not)
The Objective usually is to minimize the deadline of the last Task - “Makespan”
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 4 Planning and Scheduling, FEUP/PRODEI /MIEIC 4
For the production lines (Job Shop) in the context of Flexible Manufacturing Systems (FMS) the goal is to Maximize the “throughput” (transfer rate; output relative to input; the amount passing through a system from input to output) FMS are production systems with a high degree of automation and flexibility. As an example, we point out the Automotive Industry
Methods for Planning and Scheduling
Job Shop: small and medium size job production by manufacturing systems
Productivity: production as a function of production factors

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 5 Planning and Scheduling, FEUP/PRODEI /MIEIC 5
Application Example : Specify, set up and test of a large computer system Tasks: requirements identification hardware selection development/adaptation of software test and error debugging Recruiting and training of operators Objectives: Minimal Setup Time In accordance with Task ordering restrictions
Planning and Control of Processes and projects
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 6 Planning and Scheduling, FEUP/PRODEI /MIEIC 6
Application Example: Integrated Circuits Production System Tasks: Silicon Wafers production Silicon Wafers test Cutting the Integrated Circuits Assembling the Integrated Circuits Quality Tests Objectives: To produce as much as possible of high quality ICs
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 7 Planning and Scheduling, FEUP/PRODEI /MIEIC 7
Planning finds out, at a higher level of abstraction and aggregation, those restrictions to be followed in the next stages by Scheduling and Decision Making processes at a more detailed level
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 8 Planning and Scheduling, FEUP/PRODEI /MIEIC 8
Example: Planning and Scheduling for a supply chain. Tasks: material and goods are moved from one company to another (in a network of enterprises). Objectives: minimize total costs (production, transportation, inventory, …).
Ex.: paper mill is included in a network of enterprises starting from the one who supplies the wood, cellulose (pulp), paper finishing, storing, until the end-consumers of the paper (in a stationery). Additional value is being added in each one of the chain steps.
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 9 Planning and Scheduling, FEUP/PRODEI /MIEIC 9
Métodos de Planeamento e Escalonamento
xx
Supply-Chain Models

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 10 Planning and Scheduling, FEUP/PRODEI /MIEIC 10
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 11 Planning and Scheduling, FEUP/PRODEI /MIEIC 11
Anticipates/influencing Consumer Behaviours Maximizing Profits
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 13 Planning and Scheduling, FEUP/PRODEI /MIEIC 13
Characteristics of Activities (processing)
Restrictions about: precedence eligible machines and tools workforce (teams, workers, workload…) handling of materials (robots,…)
Restrictions about: costs setup time, maintenance,… storage space, waiting times priorities (task interruption/abortion due to other events) transportation capabilities
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 14 Planning and Scheduling, FEUP/PRODEI /MIEIC 14
Performance Measures and Objectives:
Minimizing “Makespan” is equivalent (helps) to maximizing “Throughput”
Throughput: depending on critical paths (or machines) (bottlenecks)
Makespan: Cmax = max (C1, C2,…, Cn) where Ci is the deadline for executing task Ti
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 15 Planning and Scheduling, FEUP/PRODEI /MIEIC 15
Performance Measures and Objectives:
Temporal Deviation (Lateness): Lj = Cj – dj Where dj is the due time to execute Task j. Lateness may be negative. Maximum Deviation : max (L1,…Ln)
Tardiness: Objective Function Tj = max(Cj-dj, 0) similar to Lateness but only positive.
Weighted Tardiness: 1 to n Wj*Tj
Methods for Planning and Scheduling
A scheduliong performance measure may be trying to minimizing total Tardiness
Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 16 Planning and Scheduling, FEUP/PRODEI /MIEIC 16
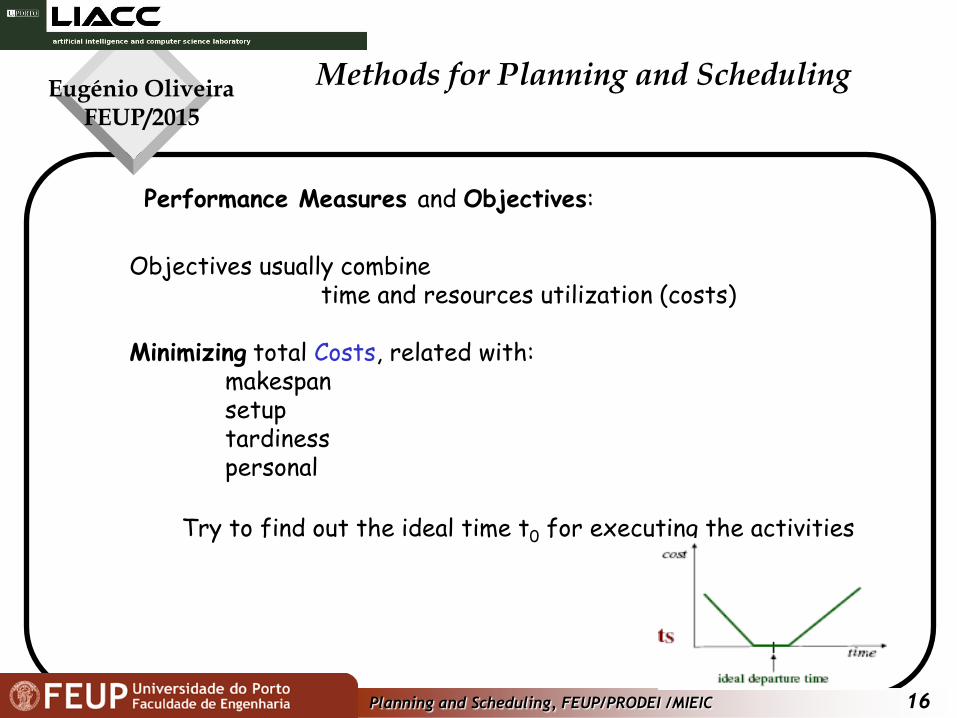
Objectives usually combine time and resources utilization (costs) Minimizing total Costs, related with: makespan setup tardiness personal
Try to find out the ideal time t0 for executing the activities
Methods for Planning and Scheduling
Performance Measures and Objectives:

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 17 Planning and Scheduling, FEUP/PRODEI /MIEIC 17
Plan of Activities Representation :
Precedences: 1 - 4 2 - 5 3 - 6, 7 4 - 6, 7 5 - 6 6 -2 7 -2 2-8 8 -
Methods for Planning and Scheduling
8
Tasks on the temporal axis
Network Diagram

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 18 Planning and Scheduling, FEUP/PRODEI /MIEIC 18
Critical Path Method (CPM)
Schedule the activities in a temporal scale For all i:Task i Processing Times Pi are known Assumes resources independency Enough number of Machines in parallel (availability) N Tasks with precedence constraints
Objective: minimizing makespan There are Tasks whose starting time may be postponed (slack job) And others that are seen as “critical tasks” The set of Tasks in the longest path between the starting node and end node, is called the “critical path”, includes Tasks that are Critical: Any delay will produce also a delay in the end of the project
Projects and Processes Planning and Control
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 19 Planning and Scheduling, FEUP/PRODEI /MIEIC 19
Critical Path Method (CPM)
Advantages of CPM: • Graphical vision (Net) of the project/ process • Anticipates the needed time to conclude the project/process • Makes explicit those critical activities to take care of in the Plan
Projects and Processes Planning and Control
Stages of CPM : • Specify individual activities • Determine the sequence of those activities • Generate the diagram as a network • Estimate the needed time for each activity • Identify the critical path • Revise the diagram during the execution stage
Methods for Planning and Scheduling
Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 20 Planning and Scheduling, FEUP/PRODEI /MIEIC 20
Critical Path Method (CPM)
forward procedure Starting the analysis at t=0 calculates the earliest possible time instant in which each task has to start Calculates the time instant at which last Task ends= makespan
backward procedure Starting the analysis at time t= makespan calculates maximum time at which each task can start. Finds out the Critical path
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 21 Planning and Scheduling, FEUP/PRODEI /MIEIC 21
Critical Path Method (CPM)
Notation: _pj task j processing time _S'j task j soonest possible starting time _C'j task j soonest possible ending time _S"j task j latest possible starting time _C"j task j latest possible ending time _C'j = S'j + pj
_{all k j} tasks preceding task j _{j all k } tasks following task j
Methods for Planning and Scheduling
C’’
S’
Slack
Pj C’
S’’
Name of Task j
Task description in the diagrams

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 22 Planning and Scheduling, FEUP/PRODEI /MIEIC 22
Critical Path Method (CPM)
Forward Procedure : Step 1: t = 0 Do S’j=0 and C’j= pj. For all Tasks j without predecessors
Step 2: Calculate for each Task j (other Tasks) S’j= max C’k {all kj} C’j= S’j + pj
Step 3: Optimal makespan is: C’max= max(C´1,..,C´n)
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 23 Planning and Scheduling, FEUP/PRODEI /MIEIC 23
Critical Path Method (CPM)
Backward Procedure : Step 1: t = Cmax Do C’’j= Cmax and S’’j= Cmax - pj. For all Tasks j without successors
Step2: Calculate for each Task j (other Tasks j) C’’j = min S’’k (j all k ) S’’j = C’’j - pj
Step 3: Verify that: min(S’’1,..,S’’n)=0
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 24 Planning and Scheduling, FEUP/PRODEI /MIEIC 24
Critical Path Method (CPM)
If both these time instants are equal, the task belongs to the Critical Path If they are different, the Task is considered a “slack job” (”relaxed task”)
Comments: Forward Procedure calculates for each task the soonest possible starting time Backward Procedure calculates the latest possible starting time for each Task
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 25 Planning and Scheduling, FEUP/PRODEI /MIEIC 25
Critical Path Method (CPM)
Example: Tasks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Pj 5 6 9 12 7 12 10 6 10 9 7 8 7 5
Precedences:
Methods for Planning and Scheduling
This Network can be replaced by the Gantt chart

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 26 Planning and Scheduling, FEUP/PRODEI /MIEIC 26
Critical Path Method (CPM)
Forward Procedure:
Tasks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 C’j 5 11 14 23 21 26 33 32 36 42 43 51 50 56
Cmax = 56
Tasks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Pj 5 6 9 12 7 12 10 6 10 9 7 8 7 5
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 27 Planning and Scheduling, FEUP/PRODEI /MIEIC 27
Critical Path Method (CPM)
Backward Procedure:
Tasks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 C’j 5 11 14 23 21 26 33 32 36 42 43 51 50 56
Tasks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 Pj 5 6 9 12 7 12 10 6 10 9 7 8 7 5
Methods for Planning and Scheduling
Tasks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 C’’j 5 12 14 24 30 26 34 36 36 43 43 51 51 56
Cmax = 56
36

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 28 Planning and Scheduling, FEUP/PRODEI /MIEIC 28
Critical Path method (CPM)
Critical Path :
Cmax = 56
Tasks 1 2 3 4 5 6 7 8 9 10 11 12 13 14
Methods for Planning and Scheduling

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 29 Planning and Scheduling, FEUP/PRODEI /MIEIC 29
Methods for Planning and Scheduling
1.Finish to start (FS) •A FS B = B doesn't start before A is finished •(Foundations dug) FS (Concrete poured)
2. Finish to finish (FF) •A FF B = B doesn't finish before A is finished
o (Last chapter written) FF (Entire book written)
There are four kinds of dependencies with respect to ordering terminal elements (in order of decreasing frequency of use):
3. Start to start (SS). •A SS B = B doesn't start before A starts
o (Project work started) SS (Project
management activities started)
4. Start to finish (SF) •A SF B = B doesn't finish before A starts

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 30 Planning and Scheduling, FEUP/PRODEI /MIEIC 30
Methods for Planning and Scheduling
There are three kinds of reasons with respect to the existence of dependencies:
1. Causal (logical) •It is impossible to edit a text before it is written •It is illogical to pour concrete before you dig the foundations
2. Resource constraints •It is logically possible to paint four walls in a room simultaneously but there is only one painter
3. Discretionary (preferential) •I want to paint the living room before painting the dining room, although I could do it the other way round, too
Traditional critical path-derived schedules are based only on causal (logical) dependencies

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 31 Planning and Scheduling, FEUP/PRODEI /MIEIC 31
Program (or Project) Evaluation and Review Technique (PERT)
Processing Times are non deterministic. Represented through stochastic variables Processing Times are averages Mj and with a variance (sj)
2 (and deviation) . PERT Calculates makespan pja =task j optimistic processing time (the minimum possible time required to accomplish a task)
pjm = task j most likely processing time (the best estimate of the time required to accomplish a task)
pjb = task j pessimistic processing time (the maximum possible time required to accomplish a task)
M^j = task j expected processing time (the best estimate of the average time required to accomplish a
task)
Methods for Planning and Scheduling
a model for project management designed to analyze and represent the tasks involved in implementing a given project. It is commonly used in conjunction with the critical path method or CPM.

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 32 Planning and Scheduling, FEUP/PRODEI /MIEIC 32
Expected Makespan : Task j Average Processing Time (expected): M^
j=(pja+4pjm+pjb)/6
apply CPM with expected processing times Let Jcp be an average critical path
Estimated expected Makespan: E^(Cmax)= j M
^j
(j belongs to the expected critical path)
Methods for Planning and Scheduling
Program (or Project) Evaluation and Review Technique (PERT)

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 33 Planning and Scheduling, FEUP/PRODEI /MIEIC 33
If μ = E(X) is the expected time (average) for the random variable X, then the deviation is Var(X)= E ( (X-m)2 ) i.e, the variance is the expected value of the squared difference between the variable's realization and the variable's mean. We may say in simple words that is the "Average of the squares of the distances between each real time point and its average ". Thus it is the “average of the squares of the deviations". The variance of a random variable "X" is Var(X) or simply σ2. In this case σ2= (optimistic-pessimistic/6)2
Methods for Planning and Scheduling
Program (or Project) Evaluation and Review Technique (PERT)
Calculation of averages and variances:
Tasks’ processing Times. Restrictions same as previously considered
Precedences:

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 34 Planning and Scheduling, FEUP/PRODEI /MIEIC 34
Eg. for the calculation of Var(Tj): Task T1: Var(T1)= [(4-6)/6]2=(1/3)2
Task T2: Var(T2)= [(4-8)/6]2 =(2/3)2
Task T6: Var(T6)=[(12-12)/6]2 = 0
Methods for Planning and Scheduling
Program (or Project) Evaluation and Review Technique (PERT)

Eugénio Oliveira FEUP/2015
MPE/ProDEI/MIEIC Eugénio Oliveira Planning and Scheduling, FEUP/PRODEI /MIEIC 35 Planning and Scheduling, FEUP/PRODEI /MIEIC 35
Precedences were the same and the Critical path is: 1 3 6 9 11 12 14 Estimated Makespan : E^(Cmax)= m^j =56 (J belonging to Jcp)
Makespan Estimated Variance :V^(Cmax)= sj 2 = 2.66 (J belonging to Jcp)
Potential problems in using PERT: Sub-estimation of the project duration. Ignores those paths that are non critical It is probabilities-based
Methods for Planning and Scheduling
Program (or Project) Evaluation and Review Technique (PERT)