chapter 1 elastic foundation teacher : li weimin 2013.3 fea
TRANSCRIPT

Chapter 1Chapter 1 Elastic FoundationElastic Foundation
Teacher: Li Weimin
2013.3
FEA

IntroductionThe elasticity is a branch of the solid mechanics, the
task of it is to research the elasticity object’s stress, deformation and displacement due to external force or change of temperature (sufferring force).
This course shows the mathematics modeling process of mechanics problems completely, and establishes the basic equation and boundary condition of the elasticity and proceeds to beg the solutions of some problem. The foundation of the elasticity basic equation lays a foundation for further number method.

Introduction
The elasticity is the foundation of studying finite element method.
So we must learn it’s basic theory well.

§1-1 The Modeling of the Engineering Mechanics Problem
1 、 The Modeling Process of the Engineering Mechanics problem
Through the process of establishing the mechanics model in the engineering mechanics problem, generally three parts should be simplified:
1) Construction Simplification
2) Suffering Force Simplification
3) Material Simplification

Material is simplified according to these hypothesises of the same kind,
consecution and uniformity in each direction. ( 统一、连续、均匀假设 )
( 3 ) Material simplification
According to the Saint-Venant’s principle, the complex force system is simplified to an equivalent force system.
( 2 ) Suffering Force Simplification
Such as space problem is simplified to flat surface problem(3D—2D) and symmetry problem in axis, and entity construction is simplified to plate construction
( 1 ) Construction Simplification

§1-2 The Basic Assumption of the Elasticity In elasticity, doing some necessary assumptions under the premise that can satisfy the practical needing precision and making the problem solved.
( 1 ) Consecution assumption :Some physics measures inside the object, for example stress, strain and displacement etc.whose variety regulation may be denoted by continuous function in coordinate. ( 2 ) Ideal elasticity assumption : supposing that the object is a ideal elastic body,then the elastic body obey the Hooke’s law---the stress becomes the direct proportation with homologous deformation.And the elasticity constant doesn’t change along with the variety of stress and deformation. ( 3 ) Even assumption :supposing the object be constituted by the same material, the elasticity of the object would not change along with position coordinates change.
The basic assumption of the elasticity :

( 4 ) Isotropy assumption : The elastic properties of one point in object are the same in every direction. (steel---isotropic ,wooden structure----not isotropic)
( 5 ) Assumption of small deformation : supposing displacement and deformation is very small.Then using the dimension before deformation instead of the one after deformation. The small quantity in high level may be ignored when investigating strain and displacement of the object.Which is very important to the linearization of the equation.
The assumptions above are suitable for many problems in engineering, but they exist errors much differently for some problems, then it is necessary to use another brief method.But it is still the same for the basic theories of many concepts.The elasticity is the foundation of the subjects of learning finite element method and etc.
§1-3 Comparison among the three courses in solid mechanics
Theory of elasticity is often called elasticity
for short.
It is a branch of solid mechanics.

Three branches of solid mechanics
Mechanics of materials 材料力学 , Structural Mechanics 结构力学
Elasticity 弹性力学

• What does the Elasticity deal with?
It deals with the stresses, deformations and displa
cements in elastic solids produced by external forc
es or changes in temperature.
• It analyzes the stresses, deformations and displac
ements of structural elements within the elastic ra
nge and thereby to check the sufficiency of their st
rength, stiffness and stability ( 强度、刚度和稳定性 ).

Comparison among the three courses in solid mechanics
• Three branches have the same purpose and do differ from one another both in objects studied and the methods of analysis used.
• 1. Objects studied 研究对象 2. Methods of analysis 研究方法

to deal with the elastic solids 都是研究弹性体
1. objects studied (1) Similarity

(2)objects studied--difference
Mechanics of materials bar element
单根杆件Structural bar systems:--
Mechanics truss, rigid frame
杆件系统: 桁架,刚架。 Elasticity 1. plates and shells 板,壳( range widely ) 2.blocks: 块体 e.g. dams,foundations 坝,基础 3.analyze bar element precisely
对杆件作精确分析

• Mechanics of materials
deals essentially with the stresses and displacements of structural element in the shape of a bar, straight or curved, which is subjected to tension, compression, shear, bending, or torsion.
材料力学研究受到拉、压、剪、弯或扭的直杆或曲杆的应力和位移。
——Solid Sizes in length is bigger than in cross direction.
• Structural Mechanics deals with the stresses and displacements of a structural in the form of a bar system, such as a truss or a rigid frame.
• 结构力学研究杆件系统(例:桁架或刚架)的应力和位移
• Structural Mechanics deals with the stresses and displacements of a structural in the form of a bar system, such as a truss or a rigid frame.
• 结构力学研究杆件系统(例:桁架或刚架)的应力和位移

• Elasticity deals with the stresses and displacements of the structural elements such as blocks, plates and shells, which are not in the form of a bar.
• 弹性力学研究块体、板和壳体的应力和位移。
• Elasticity also analyze a bar element thoroughly and precisely.
• 弹性力学对杆件作更精确分析
2. Methods of analysis
(1) Similarity
equilibrium aspects 静力学方面 geometrical aspects 几何学方面 physical aspects 物理学方面

•equilibrium aspects --equilibrium of forces of an isolated body静力学方面 -- 脱离体力的平衡
• geometrical aspects --the relations between displacements and strains. 几何学方面 -- 位移和应变的关系
• physical aspects-- -- the relations between stresses and strains
物理学方面 -- 应力和应变的关系

(2) methods of analysis:------ difference
Mechanics of materials: some assumptions on the strain condition or the stress condition are made
材料力学: 对应变或应力情况作某些假定
Elasticity : no assumptions on the strain condition or the stress condition are made.
弹性力学 : 对应变或应力情况不作假定
Mechanics of materialssome assumptions on the strain condition or the stress condition are made
The assumptions simplify the mathematical derivation to a certain extent.
The assumptions inevitably reduce the degree of accuracy of the results obtained..

Elasticityno assumptions on the strain condition or the stress condition are made.
The results obtained in elasticity are more accurate and may be used to check the approximate results obtained in Mechanics of materials.

•The problem of bending of a straight beam under transverse loads.
•It is assumed in mechanics of materials that a plane section of the beam remains plane after bending, which leads to the linear distribution of bending stresses.
•No assumption, that a plane section of the beam remains plane after bending, is made in Elasticity.

•A prismatical tension member with a small hole
•It is assumed in mechanics of materials that the tensile stresses are uniformly distributed across the net section of the member.
•The analysis in elasticity shows that the stresses are by no means uniform, but are concentrated near the hole.

Mechanics of materials —Differences and relations— Elasticity
x
qy
x
1- 1a图 x
q
y
x
0
1- 1b图
Comparison of x direction stress
Linear change
Nonlinear changes

Mechanics of materials —Differences and relations— Elasticity
x
qy
x
1- 2a图
yx
qy
y
1- 2b图
qy
xx
q
1- 2c图
Comparison of y direction stress

Mechanics of materials —Differences and relations— Elasticity
1- 3a图
1- 3b图

Mechanics of materials —Differences and relations— Elasticity
In General, elasticity and mechanics of materials both linked and differentiated. They all belong to the field of solid mechanics, elasticity than the mechanics of materials, research more generally, closer analysis methods, research results more accurate, more broad in scope.
However, the elasticity has its inherent weakness too. As the study object deformation state of the more complex, and more stringent, thus solving problems that often require lengthy mathematical operations. In order to simplify calculations, mathematical tractability, it remains on the nature of the material in the material mechanics assumes .

§ 1.4 some important concepts in theory of elasticity
A. External Forces 外力B. Stress 应力
C. Deformation(Strain) 形变 ( 应变 )
D. Displacement 位移

A. External forces 外力
It can be divided into the stress of volume and plane according to the different distribution of the external function, which are called volumetric force and surface force respectively.
1. Body forces ----Qv=[X,Y,Z]T 体积力,体力
2. Surface forces ----Qs=[ ] T 表面力,面力
X

1. Body forces Qv 体力
External forces or the loads,distributed over the volume of the body,are called body forces.
E.g. gravitational forces, or inertia forces in the case of a body in motion.

1. Body forces Qv
( 1 ) Definition : It is the stress distributed in volume of the object that is called volumetric force,for example,gravity and inertia force.It is shown in Fig.a------Qv=F= Q/ V= =[X,Y,Z]△ △ T
( 2 ) Property : volumetric force is different from the different location in a point ;the volumetric force is continuous in distribution.
z
x
y
△V
O
PX
Y
QF
Fig. a
Z

( 3 ) Gather degree :集度
( 4 ) The component of volumetric force : The force of F is resolved along with the three coordinates, which will get the three components of straight intersection:
X,Y,Z are called the components of volumetric force at point P.Plus sign and negative sign are separately determined by the direction of components,and then is[Force][Length]-3. e.g. N/m3
The average gather degree of volumetric force:
The gather degree of volumetric force at point P:
The direction of F=Qv is the limited one of

2. Surface force---Qs
(3) Gather degree of surface force:the average gather degree of the surface force above :ΔQ/ ΔS
The gather degree of the surface force at P:
(4) The components of surface force:
The components of surface force are ,and then are [Force][Length]-2
x
y
z
P
△S
XY
ZF
Q
Fig.b
(2) Property:In general, surface force is the function of located coordinates at point in the surface of the object.
(1) Definition:surface force is distributed one in the surface of the object.For instance,liquid stress and contact stress .
It is shown in Fig.b.

B. Internal force------stress
3.Stress gather degree :The average gather degree of internal force above :
The stress at point P:
---Positive stress ---Shearing strength
And then are[Force][Length]-2
The stress component at point P is , .
2.Property : The same point in the object,whose stress of different cross sections is different.
1.Definition : The object bears the external force function.Additional internal force is produced among every cross sections of the object interior.For displaying these internal forces,we use a cross section to cut the object open, and then take out a part among them.The function of a part to another part among them that expresses for internal force, which are resultant force of distributed forces that distribute on the cross section.When the area of cross section incline to the zero,the distributed force on the cross section is shown as Fig. c.
x
y
z
A
B
P
o
△A
s
Q
n
m
Fig.c

4.The components of the stress
Stress is relevant with not only the position of point but also the direction of the cross section. It is not a general vector but is two rank tensor.
The component of the stress on the plane is equal in size but contrary in direction at the meaning of omitting the small quantity in high level.
(1) For analyzing the state of one point,one small positive parallel hexahedron is taken out from the point.The component of the stress of each section along with coordinates axis that is called the component of the stress.
x
y
z
o
Fig.1-5
A
B
C
P

The drawing shows that the normal of the surface of the unit is y,it is called surface y.The stress that the stress component plumbs the surface of the unit is called the positive stress.
The positive stress is recorded σy,the positive direction along y axis is positive,whose suffix means the direction along coordinates axis.
( 2 ) Symbol provision :
σy
xy
z
o
yxFig.1-6
yz The stress paralleling the surface of the unit is called the slicing stress,which is showed by , and whose the first suffix y means the flat surface of the place and the second suffix x,z mean respectively along the direction of the coordinates axis. , is showed in Fig.1-6.

The components of the stress on other x,z positive surface is shown in Fig.1-7.
The stress on positive surface is positive along the positive direction of coordinates, and is negative athwart the positive direction of coordinates.
Fig.1-7
xy

The stress that paralleling the surface of the unit is shown likeτyx 、 τyz in Fig.1-8,which is positive along the negative direction of x axis and z axis.Fig.1-8
Fig.1-8 shows that the normal of the surface of the unit is the negative direction of y, the positive stress is recorded ,which is positive along the negative direction of y axis.

Stress components under the Rectangular coordinate system

Stress components of a point

3.Strain
The strain is the changes of the shape.The strain of the object may come down to the changes of the length and the angle. 1.Positive strain : In Fig.1-9 the flex of the line segment per-unit length, namely unit flexible or opposite flex, which is called positive strain, positive strain is shown respectively by , , .
Fig. 1-9

2.Shearing strain : In Fig.1-9, the orthogonal changes of the line segment PA,PB,PC are means with the radian, which is called shearing strain . Shearing strain is shown respectively by , , .
3.Strain
Fig. 1-9
x
v
y
u
y
u
x
vxy

Strain components of a point

2) Among all points of the object have the opposite displacement, so the object produce distortion.In the elasticity, studying primarily the displacement that the distortion of the object causes.
1) The displacement that the movement of the whole object like a rigid body proceeding causes, generally which includes the translation and the rotation. In this way the displacement do not make the opposite distance of the shape and particle of the object change.(Object only contain outside effect but have no inside effect)
1. When the positions of all point of the object change, thinking generally it is constituted by the displacement of two kinds of property :
4.DisplacementDisplacement : When the object transform, the amount of changes of the all point position calls the displacement.
2.The expressing method of the displacement
The displacement of random point in object, whose projection of u,v,w in the axis of x,y,z are used to mean it.Positive direction along coordinates axis is positive, negative direction along coordinates axis is negative.These three projections are called the component of the displacement of the point.

Displacement components of a point
{δ}={u,v,w}
So any point of a solid has 15 unknown quantities : 6 stress
components ,6 strain components and 3 displacement compo
nents.
A system with as many equations as unknowns will be con
sistent :15 unknowns requires 15 equations. Now we need find 15 equations .

§ 1.6 Three equations of elasticity
There are three basic equations In elasticity :
• 1) Equilibrium equations
• 2) Geometrical equations
• 3) Physical equations

0
0
0
Zzyx
Yzyx
Xzyx
zyzxz
zyyxy
zxyxx
1. Equilibrium equations ( Relations of external forces and stress ,3 equations )
Among above : X 、 Y 、 Z is body forces of three directions

x
w
z
uz
v
y
wy
u
x
vz
wy
vx
u
zx
yz
xy
z
y
x
r
w
r
wu
r
v
rz
wz
u
r
vr
uw
r
z
vr
u
r
zz
rz
z
r
1
1
1
2. Geometrical equations ( Relations of displacement and strain , 6 equations )
Cylindrical coordinate system
Rectangular coordinate ststem

3. Physical equations (Relations of stress and strain ----Hook's law, 6 equations)
Shorthand for :

Physical equations
式中 :
E : elastic constant (pa)
μ: poisson's coefficient
G: shear modulus , it exists relationship with elastic constant E, poisson's coefficient μ as follows :
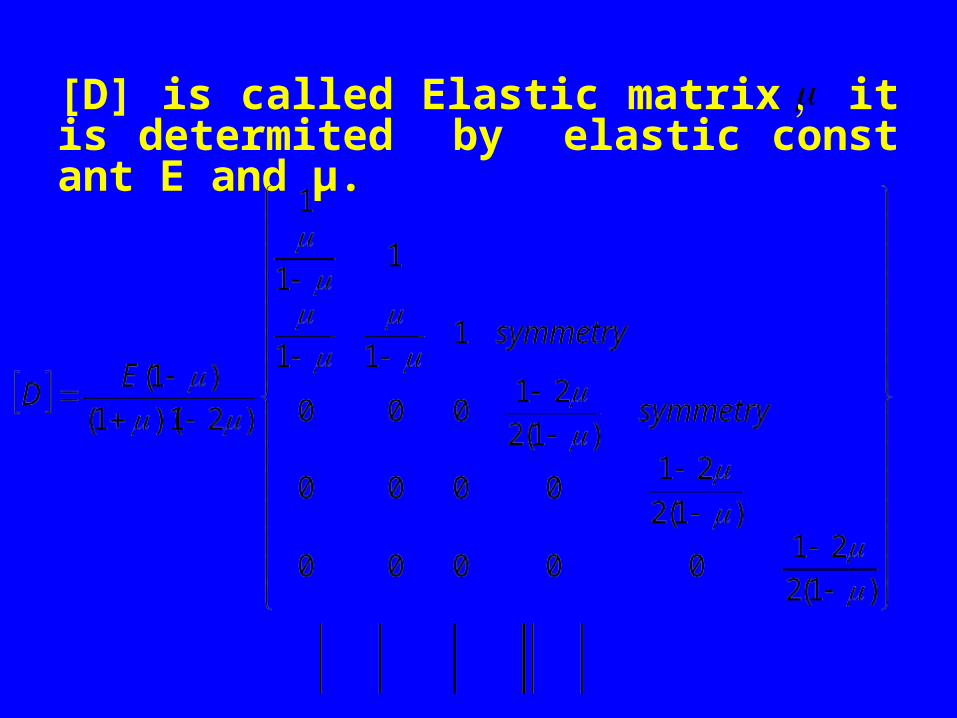
[D] is called Elastic matrix , it is determited by elastic constant E and μ.

§ 1.7 Principle of virtual work and virtual work equation
Fig.1-8a 一 Balancing lever , To write c torque balance equation:
Fig.1-8b represents a lever around the point c when turning rigid body displacement map:
thus :
That is : When a balanced force system performance, power must be equal to th
e sum of zero. This is called the virtual work principle.
a
b
P
P
B
A
a
b
A
B
A
B
B
A
a
b
P
P
0 BBAA PP

Principle of virtual work and virtual work equation
Virtual work principle expressed as follows : The system in equilibrium under the action of forces, when consistent with the constraints of any small displacement of a rigid body, made all the system's forces at the displacement of the total work (algebraic sum of work of all force’ done) constant is zero.
That is :
This is called the virtual work equation , among them P and Δ Representative forces and the virtual displacements.
0 PW

Principle of virtual work ----using elastic solidIn fig.1-9 , point i’s external components are
point j’s external components areExternal forces components is expressed by {F }, stress components caused by an external force is expressed by {σ}:
y
Z
X
0
iV
iU
iW
i
iwiv
iu
jUju
jWjw
jVjv
j
1- 9图
iii WVU 、、
jjj WVU 、、
zx
yz
xy
z
y
x
j
j
j
i
i
i
W
V
U
W
V
U
F
,

Principle of virtual work ----using elastic solid
If it produces virtual displacements , virtual displacements components are , is expressed by {δ*}, strain components is expressed by {ε*}.
y
Z
X
0
iV
iU
iW
i
iwiv
iujU
ju
jWjw
jVjv
j
1- 9图
******jjjiii wvuwvu 、、、、、
*
*
*
*
*
*
*
*
*
*
*
*
*
*
zx
yz
xy
z
y
x
j
j
j
i
i
i
w
v
u
w
v
u
,

Principle of virtual work ----using elastic solid
Virtual work producing by external forces are :
above formula, “T” stands for transpose matrix.
similar , when producing virtual displacements ,inside unit elastic solid ,virtual work is :
Thus , inside whole solid’s virtual work is :
thus :this is virtual equation of elastic solid.
FwWvVuUwWvVuU Tjjjjjjiiiiii
*******
Tzxzxyzyzxyxyzzyyxx
*******
dxdydzT *
** dxdydzF TT

§ 1.8 Spatial problems and plane problems ——two plane problems
In engineering of mechanics ,in order to simplified calculation , a spatial problem can become a plane problem (3D——2D).When: the body has a particular shape.
particular external forces.Plane problems: 1)plane stress problems ---e.g. link ,gear 2)plane strain problems----e.g. key of axis

Plane stress
problems
x
y
0
t / 2t / 2
z
y
1- 10图
conditions for plane stress problem
Body--a very thin plate of uniform thickness t. External forces--1. The surface forces act on the edges only.2. The surface forces and body forces are parallel to the faces of the plate and distributed uniformly over the thickness. 。

Plane stress problems- Plane stress problems--characteristic
• Noting the absence of surface forces on the faces of the plate, we have:
(z zx zy)z=t/2=0
• since stress gradients through plate are small,
(z zx zy)z=any ≈ 0
• (x y xy)≠0 ,They are functions of x and y only.
• the plate is said to be
in a plane stress condition
x
y
0
t / 2t / 2
z
y
1- 10图
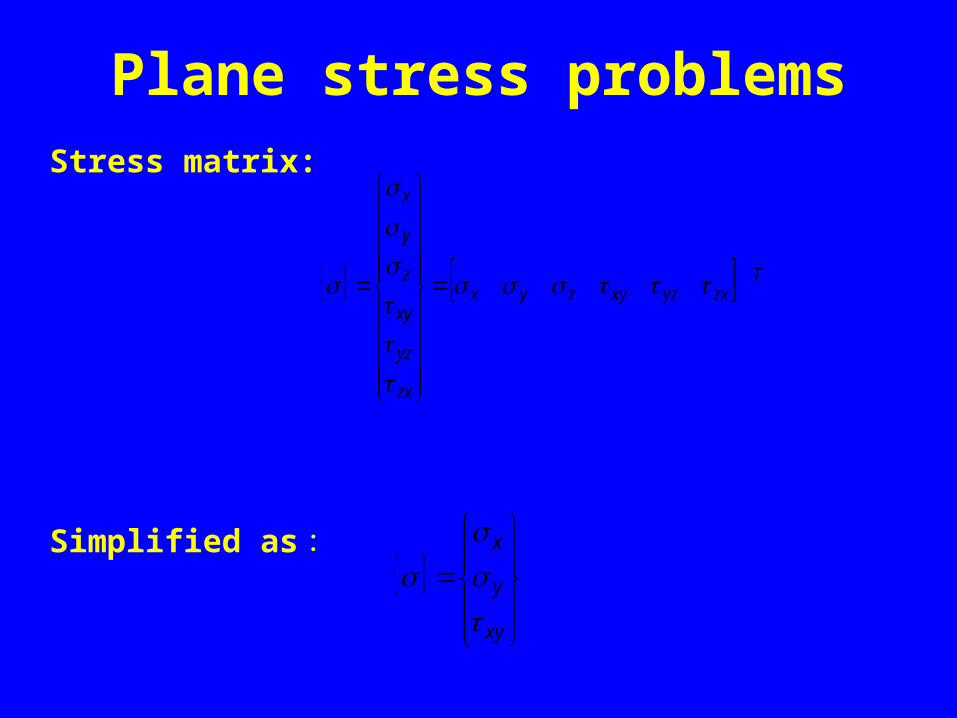
Plane stress problemsStress matrix:
Simplified as :
Tzxyzxyzyx
zx
yz
xy
z
y
x
xy
y
x

Plane stress problemsIn physical equations shearing strain are :
εz :
So physical equations can be Simplified as:
zxzx
yzyz
xyxy
yxzz
zxyy
zyxx
G
G
G
E
E
E
1
1
1
)(1
)(1
)(1
00 zxyz ,
)( yxz E
0z
xy
y
x
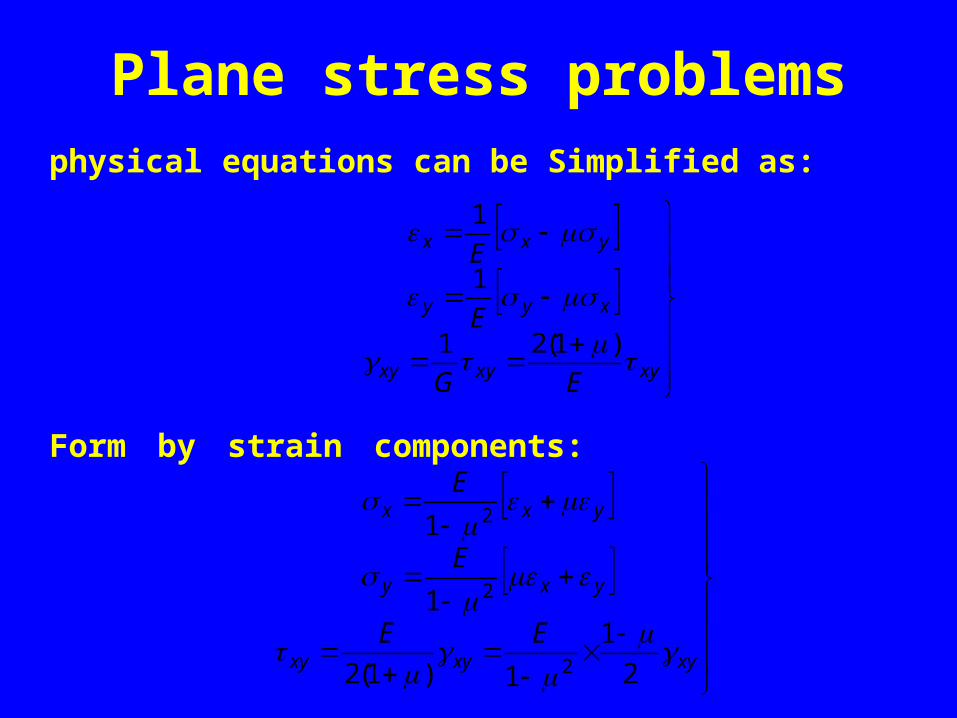
Plane stress problemsphysical equations can be Simplified as:
Form by strain components:
)1(21
1
1
xyxyxy
xyy
yxx
EG
E
E
2
1
1)1(2
1
1
2
2
2
xyxyxy
yxy
yxx
EE
E
E

Plane stress problemsExpressed by matrix :
Simplified as:
Elastic matrix [D] simplifiedcan be :
22)-(1
2
100
01
01
1 2
xy
y
x
xy
y
xE
D
23)-(1
2
100
01
01
1 2
E
D

Plane stress problemsGeometrical equations
Can be simplified as :
z
u
x
w
y
w
z
v
x
v
y
uz
w
y
v
x
u
zxyzxy
zyx
,,
,,
x
v
y
uy
vx
u
xy
y
x

Plane stress problems
Virtual work equation of elastic solid:
Can be simplified as :
** dxdydzF TT
** dxdytF TT
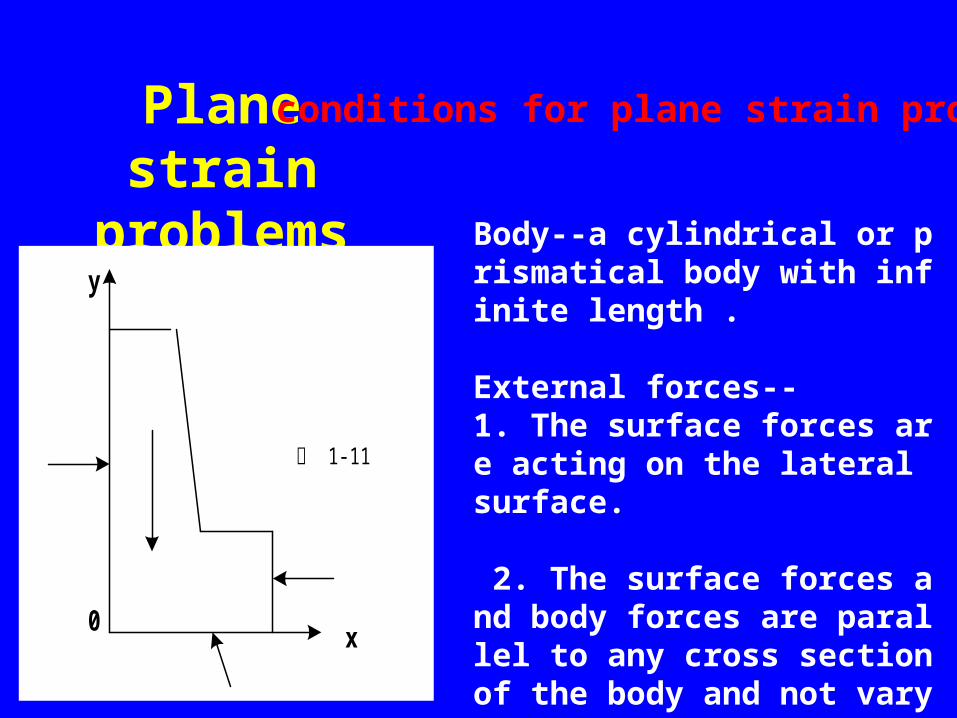
Plane strain problems
0
y
x
1- 11图
conditions for plane strain problem
Body--a cylindrical or prismatical body with infinite length . External forces--1. The surface forces are acting on the lateral surface.
2. The surface forces and body forces are parallel to any cross section of the body and not varying along the axial direction.

Plane strain problems ----characteristic
1.x and y axis are in any cross section of the body, and z axis is perpendicular to the xy plane.
2. Noting motion constrained in z direction, we have : w=0 ;(u,v)≠0,They are functions of x and y only
3. Stress and strain Symmetric condition
zx=0 zy=0 z ≠0 not independent • (x y xy) ≠0, They are functions of x and y only

Plane strain problemsGeometrical equations:
Because
z
u
x
w
y
w
z
v
x
v
y
uz
w
y
v
x
u
zxyzxy
zyx
,,
,,
x
v
y
uy
vx
u
xy
y
x
0 zxyzz
Can be simplified as :

Plane strain problemsPhysical equations can be simplified as :
)1(2
21
)21)(1(
)1(
)1(2
)1
()21)(1(
)1(
)1
()21)(1(
)1(
xyxyxy
yxy
yxx
EE
E
E

Plane strain problemsExpressed by matrix :
simplified as :
Elastic matrix [D] is :
D
)1(2
2100
011
01
1
)21)(1(
)1(
xy
y
x
xy
y
xE
)1(2
2100
011
01
1
)21)(1(
)1(
E
D

Plane strain problemsVirtual work equation of elastic solid:
Can be simplified as :
** dxdytF TT
** dxdydzF TT

Plane stress and plane strain problems
For the two kinds of plane problem , Geometric equations are ( 1-24 ), virtual work equation is (1-25 ):
24)-(1
x
v
y
uy
vx
u
xy
y
x
25)-(1 ** dxdytF TT

Plane stress and plane strain problemsPhysical equations are:
For plane stress problems [D] :
For plane strain problems [D] :
23)-(1
2
100
01
01
1 2
E
D
28)-(1
)1(2
2100
011
01
1
)21)(1(
)1(
E
D
D

§1.9 Saint-venant`s principle
• If a system of forces acting on a small portion of the surface of an elastic body is replaced by another statically equivalent system of forces acting on the same portion of the surface ,the redistribution of loading produces substantial changes in the stresses only in the immediate neighborhood of the loading, and the stresses are essentially the same in the parts of the body which are at large distances in comparison with the linear dimension of the surface which the forces are changed.

§1.9 Saint-venant`s principle
一、 Saint-venant`s principle
1. By “statically equivalent systems” we mean that the two sys
tem have the same resultant force and the same resultant mo
ment.
静力等效力系是指两个力系的主矢量相同,对同一点的主矩相同。2. If a balanced system of surface forces is applied to any smal
l portion of a body, it will induce significant stresses only in th
e neighborhood of the surface forces.
3. A balanced force system can be regarded as the difference b
etween two statically equivalent force systems.
二、 example 25

26
it will induce
significant
stresses only
in the
neighborhood
of the surface
forces.

26
Under the four kinds of circumstances above,parts of distribution of stress force distant from both ends have no marked difference.
Attention:
The application of the Saint-Venant’s principle is by no means separated from the term of Equal Effect of Static Force.

§1.10 Basic solution method of elasticity problem
There are three basic equations in elasticity:• 1 ) Equilibrium equation ( Relations of external forces
and stress ,3 equations )• 2 ) Geometrical equations ( Relations of displacement
and strain , 6 equations )• 3 ) Physical equations (Relations of stress and strain ----
Hook's law, 6 equations)

§1.10 Basic solution of elasticity problem
• Unknown number in elasticity : 15
• Basic equations in : 15
• ----so 15 equations can be used to solve the 15 unknown.

displacement
deformation
stress
Volum
etric stress
Plane stress
Geometrical equation
Physical equation Equation of equilibrium
Boundary condition
The relation of physics quantity:

§1.10 Basic solution of elasticity problem
Basic solution :• 1. displacement method :• 2. Stress method :• 3. mixing method :