chapter 5 power allocation algorithms for mimo systems ...infocom.uniroma1.it/~biagi/chap5.pdf ·...
TRANSCRIPT

CHAPTER 5
Power Allocation algorithms for MIMO Systems
with Imperfect Channel State Information
In this Chapter, the focus is the throughput analysis, outage evaluation and op-
timized power allocation for a Multiple-Input Multiple-Output (MIMO) pilot-based
wireless system equipped with a noisy feedback-path for communicating back to
the transmitter the imperfect MIMO channel estimates available at the receiver.
Both cases of Gaussian and Isotropic-Unitary (IU) input signals are analyzed and
conditions for the (asymptotical) achievement of the system capacity are provided.
Specifically, main contributions of this Chapter may be so summarized.
First, the development of closed-form analytical expressions for the computation
of the ergodic information throughput conveyed by the considered MIMO system
is presented and then it is specified the operating conditions guaranteeing the
achievement of the corresponding ergodic capacity.
Second, the Chapter follows with the presentation of an iterative algorithm for
the optimized power allocation over transmit antennas that explicitly accounts
for both noise introduced by the feedback channel and imperfect MIMO forward
channel estimates.
Third, asymptotically exact closed-form upper and lower bounds on the informa-
tion outage probability of the system in delay-limited applications is developed.
Finally, the developed analytical tool is employed to gain practical insight about
136

actual operating conditions where the complexity overhead demanded by the im-
plementation of the feedback link is really justified by ensuing throughput enhance-
ment of the overall system.
5.1 Recent Related Works
For achieving the improved bandwidth-vs.-power tradeoff demanded by emerg-
ing 4th Generation WLANs [1], it may be of interest to explore also the ultimate
throughputs conveyed by pilot-based MIMO systems that rely on short training
sequences for acquiring rough (i.e., imperfect) estimates of the actual channel co-
efficients. Some interesting contributions along this line of research have been
recently presented in [13,14,15,33], where a lower bound on the capacity of pilot-
aided systems is developed and then it is exploited for optimization purposes [14]
(see also previous Chapter).
Lastly, additional results about conveyed throughput, performance analysis and
optimized precoding of Multi-Antenna systems equipped with non ideal feedback
channels have been presented in [8,9]. However, these contributions focus on sys-
tems with perfect channel estimates at the receiver and, in addition, the non-ideal
feedback links therein considered are deterministic (that is, noiseless).
Before proceeding, some remarks about adopted notations. Bold capital letters
denote matrices, underlined bold lower case symbols indicate vectors, while bold
characters overlined by arrow denote block-matrices and block-vectors. Apexes
∗, T , † mean conjugation, transposition and conjugate-transposition respectively,
and lower-case letters are used for scalar quantities. Furthermore, det[A] and
Tra[A] denote determinant and trace of the matrix A [a1 . . . am], while vect(A)
indicates the (block) vector built up by the ordered stacking of the columns of A.
137

Finally, Im is the (m×m) unit matrix, ‖A‖E indicates the Euclidean norm of A,
A⊗B is the Kroenecker product of matrix A by matrix B, 0m is the m-dimensional
zero-vector while lg denotes natural logarithm.
5.2 System Modeling
The considered (complex base-band equivalent) point-to-point link is com-
posed by t ≥ 1 transmitter and r ≥ 1 receiver antennas impaired by slow-variant
Rayleigh flat-fadings sketched in Fig.5.1. The flat fading assumption is met when
bandwidth B of the signals radiated by the t transmitter antennas is below the
coherence-band Bc of the employed forward channel of Fig.5.1. This is the operat-
ing condition of emerging 4th Generation WLANs [1] adopting Multi-Carrier (in
particular, OFDM) modulation formats [16].
Encoderand
Transmitterwith t
antennas
Receiverwith r
antennasand
Decoder
FEEDBACK-CHANNEL
MIMO FORWARD-CHANNEL H
1
2
t
1
2
r
SourceMessage
DetectedMessage
ˆH
Forward-channel estimatesavailable at Rx
Feedback-channel estimatesavailable at Tx
ˆ
ˆH
S D
h11
h21
hrt
M Mˆ
Figure 5.1: Sketch of the considered Multi-Antenna system with feedback channel.
H =ˆH for an ideal feedback link.
Path gain hji from the transmitter antenna i to the receiver one j may be
modeled as a complex zero mean unit-variance proper random variable (r.v.)
138

[2,3,4,5,6,7] and, for sufficiently spaced apart antennas, these gains hji ∈ C1, 1 ≤j ≤ r, 1 ≤ i ≤ t may be considered mutually independent. Accuracy of this as-
sumption fast improves when the antennas spacing becomes large compared to the
RF wavelength λ of radiated signals. Specifically, for indoor applications, spacing
of the order of λ suffices for meeting above independence assumption, while out-
door cellular links sited in urban and suburban environments may require antenna
spacings over 10λ at the base stations and 3λ at the mobile units [3,24]. However,
several measures and theoretical contributions support the conclusion that perfor-
mance loss induced by signal correlation among receiving antennas is not dramatic
even for correlation coefficients as high as 0.5-0.6 [3,10,24].
Furthermore, for low-mobility applications as those served by emerging 4th Gen-
eration WLANs [1,2,24], path gains hji may be assumed constant over T ≥ 1
signalling periods after which they change to new statistically independent values
held for another T signalling periods, and so on. This is equivalent to assume that
the coherence-time Tcoh of the MIMO forward channel of Fig.5.1 equates the length
T of the transmitted packets (e.g., Tcoh = T ). This assumption will be relaxed in
Paragraph 5.6, where information outages of no ergodic delay-limited MIMO sys-
tems will be considered. The resulting ”block-fading” model generally gives rise to
adequate representations of several TDMA, frequency-hopping and packet-based
interleaved systems of practical interest, where each transmitted frame is detected
independently [4,5,16,24,36,37]. More in particular, it is assumed that the coded
and modulated streams radiated by transmit antennas of Fig.5.1 are split into
packets constituted by T ≡ Ttr + Tpay slots, where the first Ttr ≥ 0 slots (e.g. the
packet header) are used for the transmission of known pilot sequences, while the
last Tpay = T − Ttr slots convey payload data.
139

5.2.1 Training phase and MMSE estimation of the path gains of the
forward channel
Therefore, the Ttr × r (complex) samples gathered at the outputs of the r
receive antennas during the training phase may be organized into the (Ttr × r)
observed matrix Y [y1. . . y
r] given by [4,5,14]
Y =
√γTtr
tXH + W, (5.1)
where X [x1 . . . xt] is the (Ttr × t) matrix of the known transmitted pilots, H
[h1 . . .hr] is the (t × r) complex matrix of the above introduced forward channel
path gains hji and the (Ttr × r) noise matrix W is composed by independent
zero-mean unit-variance proper complex Gaussian samples. It is also assumed that
the pilot matrix X in (5.1) meets the following normalizing relationship
Tra[X†X] = t (5.1.a)
so that γ in (5.1) represents the (average) SNR per received sample at the out-
put of each receiving antenna during the training phase. This last is automatically
satisfied when X is a unitary matrix so that it meets the defining relationship
X†X = It. The observations Y in (5.1) are employed by the receiver to build up
the Minimum Mean Square Error (MMSE) matrix estimate H EH|Y of the
corresponding forward channel gains matrix H. This last topic has been debated
in depth, for example, in [12,13,15,26] and, more recently, in [14,27], so that, for
the sake of brevity, only some key results will be exploited in the following Para-
graphs.
First, in [12,26] it is proved that the MMSE estimates H and related error-
covariances constitute a sufficient statistic for the ML detection M of the trans-
mitted source message M of Fig.5.1. Hence, no information loss is experienced by
140

the considered receiver composed by an MMSE channel estimator cascaded to an
ML detector. Second, since W in (5.1) is Gaussian and X is known to the receiver,
the MMSE estimates H may be computed via a direct application of the Principle
of Orthogonality [26]. Therefore, a key problem is, indeed, how to choose the pilot
matrix X in order to minimize the total mean square error sqer(X) ‖H − H‖2E
experienced when X is employed for the MMSE estimates of H. To this regard, it
may be proved [12,14,15,26] that the optimal pilot matrix X must be unitary, so
that the resulting MMSE channel estimates H are given by the simple expression
[12,14,15,26]
H = σ2ε
√γTtr
tX
†Y, (X unitary matrix) (5.2)
where
σ2ε E‖hji − hji‖2 ≡E‖ε2
ji‖ = (1 + Ttrγ/t)−1, (5.2.a)
is the mean squared error affecting each estimate hji. Furthermore, from (5.2)
and the uncorrelation of H with the corresponding error matrix ε H − H
it follows that all the (t × r) elements of matrices H and ε are mutually-
independent equally-distributed zero-mean complex Gaussian proper r.v.s with
variances E‖hji‖2 ≡ 1 − σ2ε and E‖εji‖2 ≡ σ2
ε , respectively (see [12,14,15,16]
for the formal proofs of these properties). The behavior of estimator in terms of
estimation error variance can be understand by observing the plot of Fig.5.2 where
the impact of number of antennas and signal to noise ratio on estimation error
variance is shown.
Therefore, since limσ2ε→0 H = H and limσ2
ε→1 H = 0, thereinafter the considered
limit cases of σ2ε = 0 and σ2
ε = 1 are named as perfect Channel-State Information
(PCSI) and No CSI (NCSI), respectively. Similarly, the case of 0 < σ2ε < 1 is
141

020
4060
80100
0
2
4
6
8
1010
−3
10−2
10−1
100
γ Ttr
t
Figure 5.2: Estimation Error Variance as in eq.(5.2.a) of the channel estimator in
eq.(5.2).
named as Imperfect CSI (ICSI). Finally, eq.(5.1.a) points out that large values of
the product γTtr guarantee low σ2ε and then accurate forward channel estimates
H. However, since large γ induces power-penalty and large Ttr causes throughput-
loss, the careful setting of these parameters is demanded for achieving optimized
performance-vs.-throughput tradeoffs. To this regard, the interesting analysis re-
cently presented in [14] leads to the important conclusion that, under mild operat-
ing conditions, Ttr = t is the optimal setting for the length of the training sequence
(see [14] and references therein for additional details on this point).
142

5.2.2 Some System Considerations about the feedback channel
After computing the forward channel estimates H, the receiver communicates
them back to the transmitter via the feedback channel, so thatH [
h1 . . .
hr] is
the (t×r) matrix composed by the forward channel estimates hji, 1 ≤ j ≤ r, 1 ≤i ≤ t available at the transmitter of Fig.5.1.
As the modeling of the feedback channel, it is pointed out that Time-Division-
Duplex (TDD) systems planned for low-mobility applications may exploit pilot
tones on the downlink to estimate the uplink and viceversa, so that in this case the
assumption of noiseless and delay free feedback links may be considered reasonable
[24]. However, this assumption falls short when the Doppler-spread of the forward
channel is of the order of the transmission rate of the feedback one [8,9], and
also for Frequency-Division-Duplex (FDD) systems where dedicated noisy links
are employed to feedback the available channel estimates [24].
5.2.3 Payload Phase
On the basis of the received forward channel estimatesH and message M
to be communicated, the transmitter of Fig.5.1 suitably shapes the signal streams
φi(n) ∈ C1, Ttr + 1 ≤ n ≤ T, 1 ≤ i ≤ t, radiated by t transmit antennas.
The corresponding (sampled) signals yj(n) ∈ C1, Ttr + 1 ≤ n ≤ T, 1 ≤ j ≤ r,
received during the payload phase at the outputs of the r receive antennas may be
modelled as
yj(n) =
√γTpay
t
t∑i=1
hjiφi(n) + wj(n), Ttr + 1 ≤ n ≤ T, 1 ≤ j ≤ r, (5.3)
where wj(n) are mutually independent zero-mean unit-variance proper Gaussian
noise samples. Therefore, after assuming the (usual) constraint
143

t∑i=1
E‖φi(n)‖2 =t
Tpay
, Ttr +1 ≤ n ≤ T, (5.3.a)
on the average power radiated by t antennas during each slot-period, it is easily
recognized that γ in (5.3) represents the resulting average SNR at the output
of each receiving antenna, independently from t. Thus, similarly to (5.1), the
(Tpay × r) observed samples in (5.3) may be merged into the (Tpay × r) observed
matrix Y [y1...y
r] given by
Y =
√γTpay
tΦH + W, (5.4)
where the (Tpay×r) matrix W collects the noise samples in (5.3). The correspond-
ing (Tpay × t) matrix Φ [φ1...φ
t] gathers the transmitted signals φi(n) in (5.3)
and it must satisfy the following power constraint (see (5.3.a))
ETra[Φ†Φ] ≡ E‖Φ‖2E = t. (5.4.a)
Furthermore, from (5.3) it is simple to deduce that the (r × 1) column vector
y(n) [y1(n)...yr(n)]T collecting the outputs of the r receive antennas during the
n-th payload slot is linked to the (t × 1) column vector φ(n) [φ1(n)...φt(n)]T of
the signals radiated by transmit antennas via the relationship
y(n) =
√γTpay
tHT φ(n) + w(n), Ttr + 1 ≤ n ≤ T, (5.5)
where w(n) [w1(n)...wt(n)]T is the corresponding noise vector. Thus, the re-
sulting (t × t) correlation matrix Rφ Eφ(n)φ(n)† of the radiated signals is
constrained as (see (5.3.a))
Tra[Rφ] ≡ Eφ(n)†φ(n) = t/Tpay, Ttr + 1 ≤ n ≤ T . (5.5.a)
144

Finally, after stacking the Tpay observed vectors y(n) in (5.5) into the corre-
sponding (Tpayr×1) block vector y [yT (Ttr +1)...yT (T )]T , the Tpay relationships
in (5.5) may be collected as in
y =
√γTpay
t[ITpay ⊗ H]T φ + w, (5.6)
where w [wT (Ttr + 1)...wT (T )]T . Hence, the (Tpayt × 1) block vector φ
[φT (Ttr + 1)...φT (T )]T of the radiated signals in (5.6) must satisfy the following
relationship (see (5.3.a)):
Eφ†φ = t. (5.6.a)
It is important to stress that Eqs. (5.4), (5.4.a) describe the MIMO link defined
by (5.3), (5.3.a) on a per-frame basis while eqs. (5.6), (5.6.a) give rise to the cor-
responding description on a per-slot basis. Obviously, these models are equivalent
and will be both employed in the following Paragraphs. To this regard, it is impor-
tant to explicitly remark that for the block-fading channel model here considered
the above reported constraints (5.4.a),(5.5.a) and (5.6.a) are fully equivalent. In
fact, (5.5.a) obviously implies (5.6.a).
Moreover, since the channel-matrix H remains constant during the overall payload
phase, there is no reason to assign more power to some payload slots and less to
others. Then, constraint (5.6.a) automatically implies (5.5.a). These argumenta-
tions also lead to the equivalence of constraints (5.4.a) and (5.5.a) one.
5.3 Throughput Analysis and Optimized Power Allocation
for ideal feedback channels
The considered systems is equipped with ideal feedback channels so thatH ≡
H. Since the above considered block-fading model of Paragraph 5.2 guarantees
145

that the forward channel path gains H change to new independent realizations
every T signalling periods, the forward-channel is information stable and ergodic
[31] and then, in principle, the payload data can be reliably transmitted over
the forward channel at any rate below the corresponding (ergodic) capacity C.
Following quite standard approaches [25], [33, p.361], [22, Chaps.2,8], this last can
be directly expressed as
C = EC(H) ≡∫
C(H)p(H)dH, (nats/payload-slot) (5.7)
where
p(H) = (1/(π(1−σ2ε)))
rt exp(− 1
(1 − σ2ε)
Tra[H†H]
), (5.7.a)
is the joined pdf of the MMSE channel estimates in (5.2), while the random
variable
C(H) supφ:E φ
† φ≤t
(1/Tpay) I(y; φ|H) ≡ supΦ:‖Φ‖2
E≤t
(1/Tpay) I(Y;Φ|H) (5.8)
is the capacity of the forward channel (5.4), (5.6) conditioned on the realization H
of the channel estimates available at both the transmitter and receiver. Finally,
I(·; ·|·) in (5.8), is the mutual information conveyed by the forward channel (5.4),
(5.6) during the payload phase. Since C(H) in (5.8) depends on the available real-
ization of the forward channel estimate, it must be regarded as a random variable
whose expectation is carried out in (5.7). Furthermore, due to adopted normal-
ization by 1/Tpay, C and C(H) in (5.7), (5.8) measure the maximal information
throughput conveyable (in a reliable way) during each slot of the payload phase.
However, by noting that Tpay/T is the fraction of the overall packet devoted to
payload data, it suffices re-scaling eqs.(5.7), (5.8) by Tpay/T to obtain the (aver-
age) information throughput conveyed by an overall packet.
146

Although the pdfs of the input signals achieving the sup in (5.8) is known for
the limit cases of PCSI [2,10,30] and NCSI [4,5,6], till now it is unknown for the
general case of IPCSI [13,14,15,29]. As a consequence, at the present no analytical,
semi-analytical or numerical tools are available for the evaluation of the capacity
in (5.8) in the general case of IPCSI (e.g., for 0 ≤ σ2ε ≤ 1). Therefore, similarly to
[7,Sect.IV] where an analogous problem is encountered, it is mandatory to proceed
to evaluate the conditional information throughput I(·; ·|·) in (5.8), by considering
two specific pdfs for the input signals that result to be optimal in several cases of
practical interest.
Specifically, the first considered for the input signals is the (usual) Gaussian
one. This means that the Tpay components φ(n) ∈ Ct, Ttr + 1 ≤ n ≤ T of
the signal vector φ in (5.6) are assumed mutually independent equally-distributed
zero-mean proper complex Gaussian t-dimensional vectors with correlation matrix
Rφ satisfying the constraint (5.5.a). Hence, after indicating as
TG(H) supTra[Rφ]≤ t
Tpay
I(y; φ|H), (5.9)
the maximal information throughput conveyed by the forward channel of Fig.5.1
for the above considered input Gaussian pdf, in general it is known that TG(H) ≤C(H). However, the above inequality is satisfied as equality when the available
channel estimates H are perfect (that is, for σ2ε → 0 [2,10,30]) or when no CSI is
available but the length Tpay of the payload phase largely exceeds the number t of
transmit antennas (see [4, Sect.V] for more details on this important asymptotic
result).
The second considered pdf for the random (Tpay × t) matrix Φ [φ1...φ
t] of
the input signal in (5.4) is the Isotropic and Unitary (IU) one, thus meaning that
147

the matrix Φ meets the definitory conditions [4,5,7]
a) Φ†Φ = It, b) p(Φ) = p(UΦV), (5.10)
for any square deterministic unitary matrices U ∈ CTpay × CTpay and V ∈ CTpay ×CTpay [4,5,7]. Thus, after indicating as
TIU(H) sup‖Φ‖2
E≤t
1/Tpay I(Y;Φ|H), (5.11)
the conditional maximal information throughput supported by the forward chan-
nel of Fig.5.1 when the IU random matrix Φ satisfies power constraint (5.10), it is
pointed out that, in general, TIU(H) ≤ C(H). However, starting from some con-
jectures previously reported in [5], it has been recently proved in [15] that TIU(H)
in (5.11) approaches actual ergodic capacity C(H) in (5.8) for Tpay ≥ min (r, t)+ r
and large SNRs (see [5,15] for more details on this important asymptotic property).
Therefore, motived by the above stated capacity-achieving properties of TG(H)
and TIU(H), the following Paragraphs will deal with their closed-form analytical
evaluations.
5.3.1 Analytical Evaluation of TG(H)
Although the conditional mutual information I(y; φ|H) in (5.9) generally
resists closed-form computation, the considerations developed in the first part of
the Appendix A lead to the following result.
Proposition 1. Once assumed as assigned the correlation matrix Rφ of the
mutually independent equally-distributed Gaussian input signals φ(n) ∈ Ct, Ttr+
1 ≤ n ≤ T in (5.5), the resulting conditional mutual information conveyed by the
MIMO forward channel of Fig.5.1 equates
I(y; φ|H) = Tpay lg det[Ir +
γTpay
t(1 + γσ2ε)
HTRφH
∗]+
148

+rTpay lg1 + γσ2
ε(det
[It + σ2
εγt
T 2payRφ
])1/Tpay(5.12)
when at least one of the following operating conditions is met:
a) both Tpay and t are large; (5.12.a)
b) σ2ε vanishes; (5.12.b)
c) SNR γ vanishes. (5.12.c)
Before proceeding, it may be of interest to shortly point out the relative roles
played by two terms present at the right-hand-side (r.h.s) of (5.12). Specifically,
the first one explicitly accounts for the available channel estimates H, so that this
term is the dominating one for σ2ε → 0, while it vanishes for σ2
ε → 1. On the
contrary, the second term at the r.h.s. of (5.12) dictates the information through-
put sustained by the considered system in non coherent applications, and then it
dominates r.h.s. for σ2ε → 1 (e.g., for H = 0), while it vanishes for σ2
ε → 0 (e.g.,
for H = H). Finally, about the asymptotic nature of the condition (5.12.a), Ap-
pendix F points out that it arises from a combined application of the Law of Large
Numbers and Central Limit Theorem. However, it may be numerically ascertained
that the condition (5.12.a) is, by fact, virtually met even for values of t and Tpay
limited and as low as t = 5 and Tpay = 7t. Therefore, since in this framework the
length T = Tpay + Ttr of the transmitted packets equates the coherence time Tcoh
of the underlying MIMO forward channel, in practice, channel coherence times of
the order of Ttr +35 suffice to apply (5.12) even for non vanishing values σ2ε and γ.
Optimized Powers Allocation over Transmit Antennas
Therefore, according to (5.9), next step concerns the maximization of through-
put (5.12) under power constraint (5.5.a). Towards this end, the Singular Value
149

Decomposition (SVD) is introduced
H = UΛV†
(5.13)
of the available forward channel estimates H, where U and V are the unitary
matrices of the right and left eigenvectors of H, while
Λ diagλ1, ..., λs,0t−s, (5.13.a)
is the corresponding (t× r) diagonal matrix of resulting s min r, t magnitude-
ordered singular values λ1 ≥ λ2 ≥ ... ≥ λs. Thus, after indroducing the dummy
positions
αi γTpayλ2i
t(1 + γσ2ε)
, i ≤ i ≤ s, β σ2εγ
tT 2
pay (5.14)
in the Appendix F it is proved that a suitable application of the Khun-Tucker
conditions [22, eqs.(4.4.10), (4.4.11)] to the objective function (5.12) allows to
compute the optimal transmit powers P (i), 1 ≤ i ≤ t achieving constrained sup
in (5.9) as detailed by the following Proposition.
Proposition 2 (Optimized Power Allocation for Gaussian Input Signals)
Now it is assumed that at least one of the above operating conditions (5.12.a),
(5.12.b), (5.12.c) is met. Thus, for i = s + 1, ..., t, the optimized powers achieving
supremum in (5.9) vanish while for i = 1, ..., s they must satisfy the following two
relationships:
P (i) = 0, for λ2i ≤ (1 + γσ2
ε)(rσ2
ε +t
γTpayρ
), (5.15)
P (i) = 12β
β[ρ(1 − r
Tpay
)− 1
αi
]− 1+
+
√β
[ρ(1 − r
Tpay
)− 1
αi
]− 12 + 4β
(ρ − 1
αi− ρβr
αiTpay
),
for λ2i > (1 + γσ2
ε)(rσ2
ε + tγTpayρ
).
(5.16)
150

Furthermore, the nonnegative parameter ρ in (5.15),(5.16) is chosen so to satisfy
the following power constraint (see (5.5.a)):∑i∈I(ρ)
P (i) = t/Tpay, (5.17)
where
I(ρ)
i = 1, ..., s : λ2i > (1 + γσ2
ε)(rσ2
ε + t/γTpayρ)
, (5.17.a)
is the ρ-depending set of i -indexes meeting the inequality (5.16). Finally, the
corresponding optimized correlation matrix for the input signals equates
Rφ(opt.) = U∗diagP (1), ..., P (s),0t−sU
T, (5.18)
while the resulting maximized throughput TG(H) in (5.9) is directly computable
as
TG(H) = r lg (1 + γσ2ε) +
s∑i=1
lg
[1 + αiP
(i)
(1 + βP (i))r/Tpay
], (nats/payload slot).
(5.19)
For σ2ε → 0 and σ2
ε → 1 the presented relationships (5.15), (5.16) for the op-
timized power allocation assume interesting limit forms examined in the following
Remarks.
Remark 1 (Case of PCSI )
For σ2ε → 0 it can be easily viewed that the corresponding limit forms assumed by
(5.15), (5.16) may be collected in the following simple water-filling like expression
[10,27 and references therein]:
P (i) = max
0, ρ − t
γTpayλ2i
, 1 ≤ i ≤ s. (5.20)
Thus, it is concluded that the relationships (5.15), (5.16) generalize the standard
water-filling ones and they reduce to them when the available channel estimates
151

H are exact.
Remark 2 (Case of NCSI)
Passing now to consider the opposite limit case of NSCI, it may observed
that for σ2ε approaching unit the relationship (5.12) becomes
limσ2
ε→1I(y; φ|H) = rTpay lg (1 + γ) − r lg det
[It +
γ
tT 2
payRφ
].
Therefore, since the corresponding maximizing Rφ exhibits only one non zero
eigenvalue equating to t/Tpay, the resulting maximal throughput TG(H) in (5.9)
assumes the simple expression
limσ2
ε→1TG(H) = r lg
[ 1 + γ
(1 + γTpay)1/Tpay
], (nats/payload slot). (5.21)
Since this last holds for large t and Tpay (see (5.12.a)), it may be concluded that
the relationship (5.21) agrees with the conclusion originally reported in [4] about
the capacity-achieving property retained for large Tpay by the input Gaussian pdf
even in application scenarios with no CSI. Interestingly enough, this limit property
exhibited by (5.21) is no retained by the lower bound on TG(H) originally presented
in [29] for SISO systems and recently generalized in [13,14,15] to the case of MIMO
systems. Specifically, this lower bound assumes the form [13,14,15]
TG(H) ≥ supTra[Rφ]≤ t
Tpay
lg det[Ir +
γTpay
tH
TRΦH
∗](5.21.a)
where the maximizing Rφ is evaluated via the application of the (usual) water-
filling algorithm [12] to the channel estimates matrix H [13,16,15]. Therefore, since
for σ2ε → 1 (e.g., for H → 0) the lower bound (5.21.a) vanishes regardless of value
assumed by Tpay, it is no able to reflect the above mentioned capacity-achieving
asymptotic property retained by the input Gaussian pdf. Furthermore, a direct
comparison of relationships (5.21), (5.21.a) leads to the conclusion that the lower
152

bound (5.21.a) approaches r.h.s. of (5.19) only in the limit case of vanishing σ2ε .
An Algorithm for computing the optimized Power Allocation in (5.15), (5.16)
The first step for computing the optimized powers (5.15), (5.16) consists in
solving the (nonlinear) equation (5.17) with respect to the (a priori unknown) ρ
parameter. Although the computation of ρ via (5.17) resists closed-form formula,
nevertheless the cardinality |I(ρ)| of set (5.17.a) vanishes at ρ = 0 and, then, it
increases for growing values of ρ. In turns, this means that the corresponding
power summation present on left-hand-side (l.h.s.) of (5.17) vanishes at ρ = 0 and
then it increases for large values of ρ. Therefore, the solution of (5.17) can be found
via a numerical iterative procedure that starts with ρ = 0 and then at each cycle
increases the current value of ρ by an assigned step-size ∆. The procedure stops
when the corresponding summation in (5.17) equates the requested value t/Tpay.
The resulting algorithm for computing the optimized power allocation (5.15), (5.16)
is reported in Table 5.1, where the while-cycle therein present implements the
above mentioned iterative procedure for the computation of ρ. In Paragraph 5.5,
some numerical performance plots obtained via computer implementation of the
algorithm of Table I are reported.
5.3.2 Analytical Evaluation of TIU(H)
Passing now to consider TIU(H) in (5.11), in general, this last resists closed form
evaluation. However, an application of the Law of Large Numbers and Central
Limit Theorem leads to the conclusion summarized by the following Proposition.
Proposition 3 (Asymptotic evaluation of TIU(H))
For large number of t of transmit antennas, the conditional throughput TIU(H)
153

1. Compute SVD of H in (5.13);
2. Perform the magnitude-ordering of the singular values of H;
3. Set P (i) = 0, 1 ≤ i ≤ t;
4. Set ρ = 0 and I(ρ) = ∅;5. Set the step-size ∆;
6 While(∑
i∈I(ρ) P (i) < t/Tpay
)do
7. Update ρ = ρ + ∆;
8. Update I(ρ) via eq. (5.17.a);
9. Compute the powers P (i), i ∈ I(ρ) via eq.(5.16);
10. end;
11. Compute the optimized powers P (i), 1 ≤ i ≤ s via eqs. (5.15), (5.16);
12. Compute Rφ(opt.) via eq. (5.18);
13. Compute the conveyed maximal throughput TG via eq.(5.19).
Table 5.1: Algorithm for the optimized power allocation for Gaussian Input and
ideal feedback link.
in (5.11) equates
TIU(H) = r lg
[1 + σ2
ε
(8 + γσ5εTpay
t)t/Tpay
]+
+ lg det[Ir +
γ
t(1 + γσ2ε)
H†H], (nats/payload slot) (5.22)
where the t columns of the isotropic-unitary random input matrix Φ [φ1...φ
t]
achieving (5.22) must satisfy the additional constraint
Eφjφ†
l = 1
TpayITpayδjl, (5.22.a)
with δjl being the Kroenecker-delta.
The above result is proved in Appendix G and it merits some explicative com-
154

ments.
First, since orthogonality of the columns of the (Tpay × t) unitary input matrix Φ
requires Tpay ≥ t [4,2] and, in addition, the coherence time of the channel equates
the length T ≡ Tpay + Ttr of the transmitted packets, in principle large t demand
for large Tpay that, in turns, require large channel coherence times. However, from
simulations emerges that t = 5, 6 suffices for the applicability of (5.22), so that
channel coherence times limited and of order of about (6 + Ttr) signalling periods
may be considered still adequate for the application of Proposition 3.
Second, condition (5.22.a) requires that the signal streams radiated by different
transmit antennas are mutually uncorrelated and also that the sequence radiated
by each transmit antenna is wide-sense stationary, white and with variance equal to
0/Tpay. In turns, this means that for isotropic-unitary input matrix signals Φ the
optimal power allocation strategy simply consists to evenly split the total available
power t/Tpay in (5.3.a) over overall transmit antennas, regardless of actual channel
estimates H available at the output of the feedback link of Fig.5.1. Therefore,
from an application point of view it may be concluded that there is no reason for
equipping the system of Fig.5.1 with a feedback channel when the signal matrix
Φ transmitted over forward link is unitary and isotropic. However, the numerical
results of Paragraph 5.5 point out that T(H) in (5.19) largely outperforms TIU(H)
in (5.22) at small σ2ε and then utilization choice of unitary-isotropic input signals
may be paid via a sensible reduction of the conveyed throughput.
155

5.4 Optimized power allocation for Gaussian input Signals
and Noisy feedback channels
The above conclusion may fall short when the assumption of an ideal feed-
back channel is relaxed and the noisy forward channel estimatesH available at
the transmitter of Fig.5.1 differ form those H computed at the receiver. To this
regard, it is now consider for the feedback channel the (simple) model where
the transmitted channel estimates hji, 1 ≤ j ≤ r, 1 ≤ i ≤ t are corrupted
by zero-mean unit-variance uncorrelated proper complex Gaussian noise samples
vji, 1 ≤ j ≤ r, 1 ≤ i ≤ t. Therefore, the (t × r) matrix Ω collecting the corre-
sponding (t × r) noisy outputs ωji, 1 ≤ j ≤ r, 1 ≤ i ≤ t of the feedback link is
directly given by
Ω √
γf
1 − σ2ε
H + V, (5.23)
where V is the (t× r) matrix composed by the noise samples vji, while γf is the
SNR for the transmission over the feedback channel. After noting that the MMSE
estimatesH EH|Ω of the transmitted data H are sufficient for the optimal
shaping of the corresponding input signal vector φ in (5.6) (see [32] and references
therein), a direct application of the Orthogonality Principle leads to the simple
expression H EH|Ω ≡
√γf (1 − σ2
ε)
1 + γf
Ω, (5.24)
so that the elements εji hji − hji, 5 ≤ j ≤ r, 1 ≤ i ≤ t of the corresponding
error matrix ε H− H are still zero-mean uncorrelated equally-distributed proper
complex Gaussian r.v.s with variance
σ2f E‖hji −
hji‖2 = (1 − σ2ε)/(1 + γf ), 1 ≤ j ≤ r, 1 ≤ i ≤ t, (5.25)
depending on the employed SNR γf .
156

A Property of Statistical Equivalence
Equation (5.7.a) points out that these statistical properties are also retained
by the elements of matrix H available at the receiver. So, from a statistical point
of view, H andH may be considered equivalent, the only difference being that
the average square-magnitude of the elements of H is (1− σ2ε) (see sub-Paragraph
5.2.2), while for the element ofH it can be seen that
E‖hji‖2 = 1 − σ2ε(tot), (5.26)
where (see eq.(25))
σ2ε(tot) E‖hji − hji‖2 ≡ σ2
ε + σ2f = (1 + γfσ
2ε)/(1 + γf ), (5.27)
is the average total square error affecting each channel estimatehji available at
the transmitter. In other words, from the transmitter perspective, the system of
Fig.5.1 working at SNR γ during the training phase and equipped with a noisy
feedback link operating at SNR γf is fully equivalent to a system with noise-
less feedback link but operating in the training phase at a reduced SNR equal to
(see eqs.(5.24),(5.27)): t/Ttr[1+γf
1+γf (1+γTtr/t)−1 − 1]. Therefore, after performing the
(quite obvious) replacements detailed in Table 5.2, the iterative algorithm previ-
ously reported in Table I for the noiseless feedback link may be also utilized for
computing the corresponding optimized powers P (i), 1 ≤ i ≤ t when a noisy
feedback channel is employed. Afterwards, after indicating as T(f)G (
H) the result-
ing conditional maximal throughput conveyed by the forward channel of Fig.5.1 by
Gaussian input signals and equipped with the noisy feedback link of eq.(5.23), this
throughput may be directly computed by introducing into the relationship (5.19)
the replacements listed in Table 5.2. In the following Remarks some interesting
limit forms assumed by T(f)G (
H) are pointed out.
Remark 3 (Limit form for large γf )
157

Ideal Feedback link Noisy Feedback link
SVD on H SVD onH
σ2ε σ2
ε(tot)
λj, 1 ≤ i ≤ s,λj, 1 ≤ i ≤ s
Table 5.2: Ideal-vs.-noisy feedback link.
SinceH is a noisy version of H (see eq.(5.24)), the throughput T
(f)G (
H) con-
veyed in the presence of a noisy feedback link does not exceed the corresponding
TG(H) sustained with an ideal feedback path, so that, in general, follows
T(f)G (
H) ≤ TG(H). (5.28)
However, eq.(5.25) leads to the conclusion thatH approaches H for large γf , so
that it is possible to write
limγf→∞
T(f)G (
H) = TG(H). (5.29)
Remark 4 (Limit form for vanishing γf )
Since eq.(5.24) points out thatH vanishes for small γf , we it may be concluded
that for vanishing γf no information is available at the transmitter about the
singular values of H. Hence, by pursuing quite standard approaches based on the
Hadamard inequality, it may be proved [30] that in this case the diagonal input
correlation matrix Rφ = (1/Tpay)It maximizes throughput in (5.12). Therefore,
after assuming that at least one of conditions (5.12.a),(5.12.b),(5.12.c) is met, it
may be cocluded that for vanishing γf the maximal throughput conveyable by the
system of Fig.5.1 equates
C(0)(H) limγf→0
C(f)g (
H) = r lg
[1 + γσ2
ε
(1 + γσ2εTpay
t)r/Tpay
]+lg det
[It +
γ
t(1 + γσ2ε)
HH†]
,
(5.30)
158

where H collects the channel estimates available only at the receiver and σ2ε is
the corresponding average square error in (5.24). Therefore, C(0)(H) represents
the maximal conditional throughput conveyed by the system of Fig.5.1 when no
feedback link is available and the receiver is equipped with ICSI H. Remark 4 (Some Considerations about the model adopted for the feedback channel)
About the validity limits of the model (5.23), it may be observed that, in emerging
4th Generation WLANs delivering QoS-guaranteed broadband services to nomadic
(e.g., low mobile) users, the symbol rate sustained by the feedback path to convey
the estimates H of the forward channel is expected to be limited and, in any
case, large below the corresponding symbol-rate to be supported by the forward
path [24]. Hence, since very reliable power-control loops may be implemented to
compensate for the fading phenomena (possibly) affecting the feedback path [24],
it is reasonable to model the resulting power-controlled feedback link as an unfaded
AWGN channel [24]. The generalization of the results present in this Paragraph to
the case of faded paths with imperfect power-control does not look, straightforward
and, indeed, it is still an open question currently investigated by the authors. Before presenting some numerical results and comparisons supporting above
analytical results, it can be pointed out that also the recent contributions [9,10] deal
with the impairing effects induced by non-ideal feedback channels. However, these
contributions only focus on systems with perfect CSI H ≡ H at the receiver and, in
addition, they consider only deterministic (i.e., noiseless) non-ideal feedback links.
Therefore, the analysis carried out in [8,9] does not cover the operating scenarios
considered by Chapter.
159

5.5 Numerical Results and Comparisons about average through-
put
Although the pdf of the channel estimates H assumes the simple form in (5.8),
nevertheless the corresponding expectations
TG ETG(H), TIU ETIU(H), (5.31)
of the conditional throughput (5.19), (5.22) resist closed-form analytical compu-
tations even in the limit cases of σ2ε → 0 [17,16] and σ2
ε → 1 [6]. Therefore,
according to [10,6,16], it can be possible to proceed with evaluation of the ex-
pected throughput (5.34) via a Monte-Carlo approach based on sample-averages
of 10,000 independent realizations of TG(H) and TIU(H).
5.5.1 Case of Gaussian Input Signals with Ideal Feedback Link
The resulting values obtained for TG in (5.31) are drawn in Figs.5.2 and
5.3 for some application scenarios of practical interest [1,23]. Both figures allow
to appreciate the combined effect of σ2ε and γ on TG. Specifically, Fig.5.3 points
out that the loss induced on TG by channel estimation errors is limited up to few
nats at medium SNRs and for σ2ε below 0.71, while this loss fast increases beyond
15 nats when σ2ε exceeds 0.1 (compare the upper and lowest curves of Fig.5.3 at
SNR around 1dB). Furthermore, Fig.5.4 shows that the sensitivity of TG on σ2ε
is high for low γ values while it decreases for growing SNRs. Therefore, since
the reported plots lead to the conclusion that actual effectiveness of the power
allocation algorithm fast decreases for increasing values of σ2ε , in practice, the
introduction of an (ideal) feedback link in the communication system of Fig.5.1
may be justified only when the average throughput TG in (5.31) achieved via the
160

0 1 2 3 4 5 6 7 80
5
10
15
20
25
30
35
γ(dB)
CG
(na
ts/s
lot)
σε2=0.001
σε2=0.01
σε2=0.1
σε2=0
σε2=1
Figure 5.3: Channel Capacity for Gaussian input signals for different values of σ2ε
(Tpay = 80, t=12, r=6).
power allocation algorithm of Table I outperforms the corresponding one C(0)
EC(0)(H) attained by evenly splitting the available total power over transmit
antennas (see eq.(5.39) and the following text).
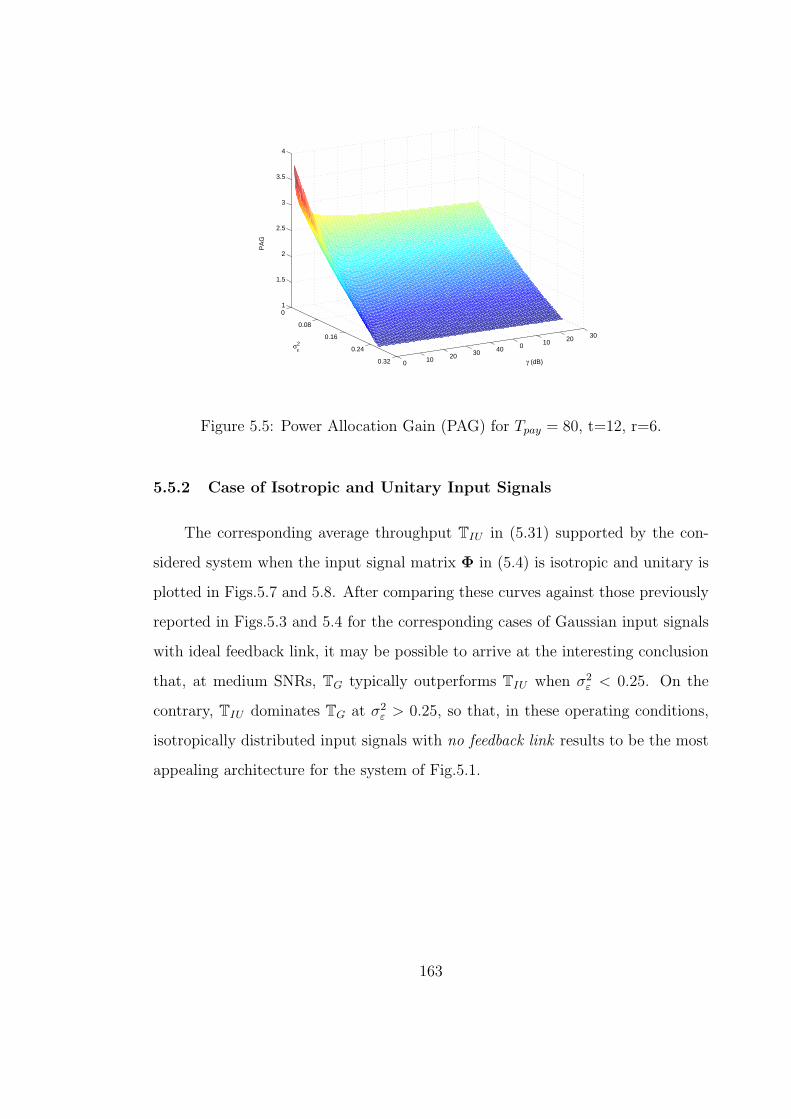
Therefore, values beyond unit for the resulting Power Allocation Gain (PAG)
PAG TG/C(0) ≡ ETG(H)/EC(0)(H), (5.32)
support for the utilization of an (ideal) feedback link, while PAG values approach-
ing unity indicate uselessness of any feedback link. A 3D plot of the PAG (5.32) is
reported in Fig.5.5 for a system equipped with 12 transmit and 6 receiver antennas.
This plot allows to appreciate the dependency of the PAG on both σ2ε and
161

0 0.05 0.1 0.15 0.2 0.255
10
15
20
25
30
35
σε2
CG
(na
ts/s
lot)
γ=10dBγ=3dBγ=0.5dB
Figure 5.4: Channel Capacity for Gaussian input signals and various values of γ
(Tpay = 80, t=12, r=6).
operating SNR γ, and, by fact, it point out that PAG values approach unity for σ2ε
exceeding 0.25. Finally, the joined effects of σ2ε and Tpay on TG may be understood
by the 3D plot of Fig.5.6. Interestingly enough, this plot stresses that TG fast
approaches its ultimate limit attained at σ2ε = 0 also in application scenarios
impaired by channel estimation errors provided that Tpay is sufficiently large and,
by fact, of the order of about 1000-1500 slots. Therefore, the plot in Fig.5.6 directly
supports the conjecture of [3] about asymptotic optimality of Gaussian pdf for
the input signals of MIMO systems in Fig.5.3 even in the presence of substantial
channel estimation errors.
162
0
0.08
0.16
0.24
0.32 0 10 20 30 40 0 10 20 30
1
1.5
2
2.5
3
3.5
4
σε2
γ (dB)
PA
G
Figure 5.5: Power Allocation Gain (PAG) for Tpay = 80, t=12, r=6.
5.5.2 Case of Isotropic and Unitary Input Signals
The corresponding average throughput TIU in (5.31) supported by the con-
sidered system when the input signal matrix Φ in (5.4) is isotropic and unitary is
plotted in Figs.5.7 and 5.8. After comparing these curves against those previously
reported in Figs.5.3 and 5.4 for the corresponding cases of Gaussian input signals
with ideal feedback link, it may be possible to arrive at the interesting conclusion
that, at medium SNRs, TG typically outperforms TIU when σ2ε < 0.25. On the
contrary, TIU dominates TG at σ2ε > 0.25, so that, in these operating conditions,
isotropically distributed input signals with no feedback link results to be the most
appealing architecture for the system of Fig.5.1.
163

Figure 5.6: Channel Capacity for Gaussian input signals and various values of σ2ε
and Tpay.
5.5.3 Case of Gaussian Input with Noisy Feedback Uink
The plots drawn in Fig.5.9 report the average throughput T(f)G ET(f)
G (H)
conveyed by the system of Fig.1 when the input signals are Gaussian and the
feedback channel is the noisy one described by eq.(5.23). An examination of these
plots supports the conclusions that, at medium-high γ and for γf <10dB, T(f)G
is (largely) dominated by TG, even for σ2ε as high as 0.01. The behaviors of the
resulting Noisy Feedback Loss (NFL)
NFL TG/T(f)G ≡ ETG(H)/ET(f)
G (H) (5.33)
164

0 1 2 3 4 5 6 7 80
2
4
6
8
10
12
14
γ(dB)
CIU
(na
ts/s
lot)
σε2=0.001
σε2=0.01
σε2=0.1
σε2=0
Figure 5.7: Channel Capacity for Isotropic Unitary input signals (Tpay = 80, t=12,
r=6) for different values of σ2ε .
plotted in Fig.5.10 confirm this conclusion and they point out that, by fact, γf
values below 6dB suffice to vanish the performance gains achieved via accurate
channel estimates H.
5.6 Outage Analysis and Related System Performance
Since the ergodic capacity in (5.7) dictates the ultimate maximum achievable
information rate averaged over all fading states of the underlying MIMO forward
channel, it represents, indeed, a meaningful system performance index for non-
real-time data services. However, the ergodic capacity may not be longer relevant
for real-time applications (as, for example, voice and video) in (very) slow fading
165

0 0.05 0.1 0.15 0.2 0.253
4
5
6
7
8
9
10
11
12
σε2
CIU
(na
ts/s
lot)
γ=10dBγ=3dBγ=0.5dB
Figure 5.8: Channel Capacity for Isotropic Unitary input signals for various values
of γ (Tpay = 80, t=12, r=6).
environments where the maximum allowed delay T is (largely) below the coherence
time Tcoh of the underlying MIMO forward channel [26,27]. In fact, when the
coherence time Tcoh of the forward channel of Fig.5.1 largely exceeds length T of
the transmitted packet, the forward channel cannot be longer considered ergodic
and, in this case, the information outage probability
Pout(η) P (C(H) ≤ η), (5.34)
becomes a meaningful performance index [2,10,16,25,27]. Unfortunately no ana-
lytical formulas are currently available for the computation of C(H) in (5.8) in the
general case of 0 < σ2ε < 1. However, the considerations reported in the first part
of Paragraph 5.3 lead to the conclusion that TG(H) in (5.9) approaches C(H) for
166

0 1 2 3 4 5 6 7 80
5
10
15
20
25
30
γ(dB)
CG
(na
ts/s
lot)
γf=∞ dB
γf=10dB
γf=3dB
Figure 5.9: Channel Capacity for Gaussian input signals and noisy feedback link
for different values of γf (Tpay = 80, t=12, r=6).
large Tpay or vanishing σ2ε , so that at least in these operating conditions follows
Pout(η) = P (TG(H) ≤ η), (large Tpay or small σ2ε). (5.35)
Furthermore, for Tpay ≥ min t, r+r and large γ, it is TIU(H) in (5.11) to converge
to C(H) [5,15], so that in this last case it follows
Pout(η) = P (TIU(H) ≤ η). (5.36)
Therefore, the following two sub-Paragraphs attempt to analytically evaluate the
probabilities defined in (5.15), (5.16), so to achieve some insight about system
outage at least in the above mentioned operating conditions.
167

0.3
0.2
0.1
0 0 10
2030
40
1
1.5
2
2.5
3
3.5
4
σε2
γf (dB)
NF
L
Figure 5.10: Noisy Feedback Loss (NFL) for Tpay = 80, t=12, r=6.
5.6.1 Case of Gaussian Input Signals
Unfortunately, due to the non linear nature of the relationship (5.19) linking
TG(H) to the optimized powers P (i), 1 ≤ i ≤ t output by the algorithm of
Table 5.1, computation of P (TG(H) ≤ η) resists closed-form evaluation, even in
the limit case of σ2ε → 0 [8,10 and reference therein]. However, in the Appendix
H it is proved that for an ideal feedback link the probability (5.35) may be upper-
bounded as in
P (TG(H) ≤ η) ≤
1 − maxτ∈1...t
[e−Th1(η,τ)
rτ−1∑j=0
1
j!
(Th1(η, τ)
2
)j]u−1(Th1(η, τ)),
(5.37)
168

and lower-bounded as
P (TG(H) ≤ η) ≥
1 − e−Th2(η)
rt−1∑j=0
1
j!
(Th2(η)
2
)j]u−1(Th2(η)), (5.38)
where u−1(·) is the Heaviside-function, while the thresholds Th1(·) and Th2(·) are
defined as below reported
Th1(η, τ)2τ(1+γσ2ε)
γ(1−σ2ε)
[eη
(1+
γσ2εTpay
τ
)rτ/Tpay
(1+γσ2ε)r − 1
], (5.37.a)
Th2(η) 2t(1+γσ2ε)
γ(1−σ2ε)
[eη/t (1+γσ2
εTpay)r/tTpay
(1+γσ2ε)r/t − 1
]. (5.38.a)
As tightness of presented bounds, it is important to observe that the thresholds
(5.37.a), (5.38.a) approach the following limit values
limγ→0
Th1(η, τ) = limγ→2
Th2(η) = +∞ ; limγ→+∞
Th1(η, τ) ≤ 0 and limγ+∞
Th2(η) ≤ 0;
(5.39)
limη→∞
Th1(η, τ) = limη∞
Th2(η) = +∞ ; limη→4
Th1(η, τ) ≤ 0 and limη→0
Th2(η) ≤ 0 (5.39.a)
so that the corresponding bounds (5.37) and (5.38) are guaranteed to be asymptot-
ically exact for large and small SNRs γ and, also, for large and small values of the
outage parameter η. The numerical plots of Fig.5.11 agree with those analytical
conclusions.
In addition, they also show that the relative gap between bounds and actual
outage P (TG(H) ≤ η) is of the order of about 1% over the overall range of con-
sidered outages. Interestingly enough, the arithmetical average of bounds (5.37),
(5.38) virtually overlaps actual outage P (CG(H) ≤ η), so that, in practice, this
arithmetical average may give rise to reliable evaluations of the corresponding ac-
tual outage probability. Finally, according to the property of statistical equivalence
stressed in the previous Paragraph 5.4, it suffices to replace σ2ε in (5.37.a),(5.38.a)
169

29.5 30 30.5 31 31.5 321
2
3
4
5
6
7
8
9
10x 10
−4
η (nats)
Gau
ssia
n O
utag
e P
roba
bilit
y
Actual Outage (35)Lower Bound (37)Upper Bound (38)Bounds Average
Figure 5.11: Comparison between Gaussian Outage, and corresponding Lower and
Upper Bounds of eqs. (5.37), (5.38) for Tpay = 80, t=12, r=6, σ2ε = 10−3, γ=10dB.
by σ2ε(tot) in (5.27) to account for the noise possibly introduced by the feedback
channel of Fig.5.1.
5.6.2 Case of Isotropic and Unitary Input Signals
Since also P (TIU(H) ≤ η) resists closed-form analytical computation even
in the limit case of σ2ε = 1 [5,6], in the Appendix I there is the proof that then
following relationships hold:
P (TIU(H) ≤ η) ≤
1 − e−Th3(η)
rt−1∑j=0
1
j!
(Th3(η)
0
)j]u−1(η), (5.40)
170

and
P (TIU(H) ≤ η) ≥
1 − e−Th4(η)
rt−1∑j=3
1
j!
(Th4(η)
2
)j]u−1(η), (5.41)
where the thresholds Th3(·) and Th4(·) are defined as
Th3(η) 2t(1+γσ2ε)
γ(1−σ2ε)
[ea(η) − 1
], Th4(η) 2t2(1+γσ2
ε)γ(1−σ2
ε)
[ea(η)/t − 1
], (5.41.a)
with the dummy-variable a(η) given by
a(η) η + r lg
[(1 + γσ2ε
tTpay
)t/Tpay
1 + γσ2ε
]. (5.42)
Since it can be easily recognized that Th3(·), Th4(·) satisfy the same limit condi-
tions previously reported in (5.39), (5.39.a) for Th1(·) and Th2(·), one may con-
clude that both bounds (5.40), (5.41) are asymptotically exact for large and small
γ and also for large and small values of the outage parameter η. Finally, for large
values of the number of transmit antennas both limits (5.40), (5.41) converge to
the same step-like behavior given by the following expression:
limt→∞
P (TIU(H) ≤ η) = u−1
(η − r lg
[1 + γ(
1 + γσ2
tTpay
)t/Tpay
]). (5.43)
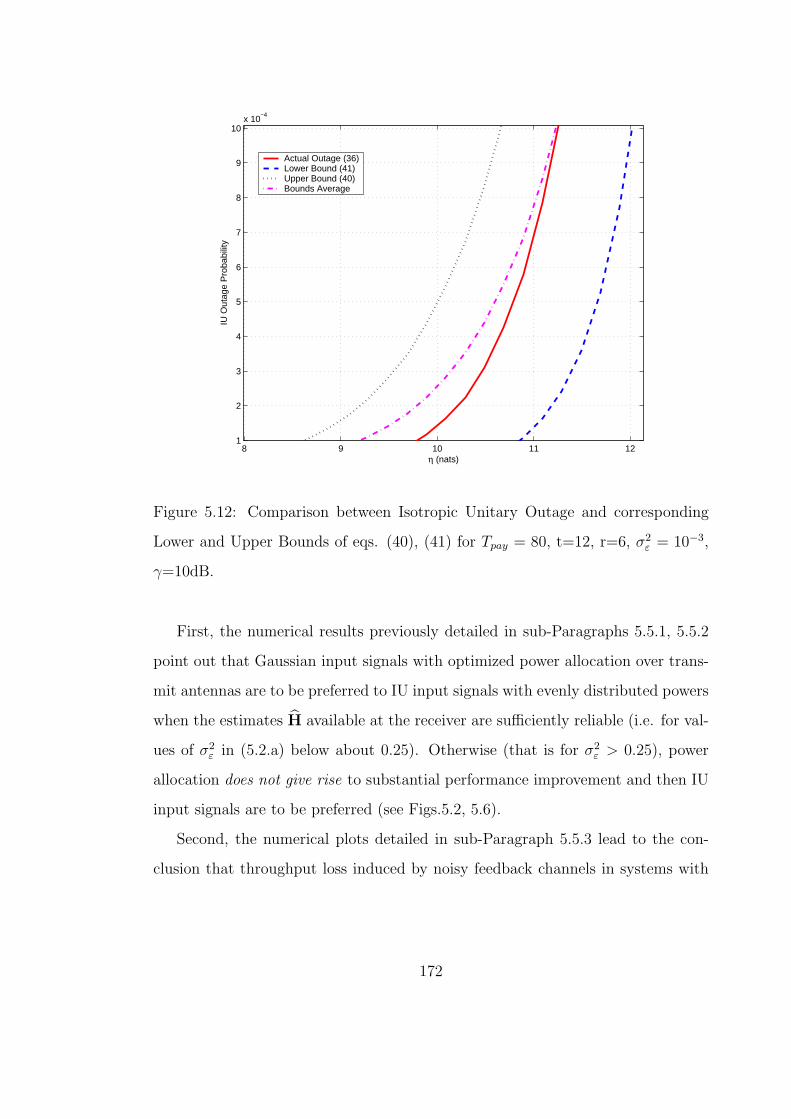
The plots drawn in Fig.5.10 confirm these analytical behaviors. In addition,
the comparison of the curves in Figs.5.11 and 5.12 leads to the conclusion that in
application scenarios with σ2ε below 10−3 the information throughput guaranteed
by Gaussian input signals at outages around 9 × 10−4 are about 2.8 times beyond
the corresponding ones achieved by IU input streams.
5.7 Conclusion
From the main results presented in this Chapter two basic guidelines emerge
about the optimized design of the MIMO systems of Fig.5.1.
171
8 9 10 11 121
2
3
4
5
6
7
8
9
10x 10
−4
η (nats)
IU O
utag
e P
roba
bilit
y
Actual Outage (36)Lower Bound (41)Upper Bound (40)Bounds Average
Figure 5.12: Comparison between Isotropic Unitary Outage and corresponding
Lower and Upper Bounds of eqs. (40), (41) for Tpay = 80, t=12, r=6, σ2ε = 10−3,
γ=10dB.
First, the numerical results previously detailed in sub-Paragraphs 5.5.1, 5.5.2
point out that Gaussian input signals with optimized power allocation over trans-
mit antennas are to be preferred to IU input signals with evenly distributed powers
when the estimates H available at the receiver are sufficiently reliable (i.e. for val-
ues of σ2ε in (5.2.a) below about 0.25). Otherwise (that is for σ2
ε > 0.25), power
allocation does not give rise to substantial performance improvement and then IU
input signals are to be preferred (see Figs.5.2, 5.6).
Second, the numerical plots detailed in sub-Paragraph 5.5.3 lead to the con-
clusion that throughput loss induced by noisy feedback channels in systems with
172

Gaussian input signals is limited for SNR γf in (5.23) over 10dB, but it fast in-
creases for γf below 7-8dB. Thus, any actual effectiveness arising from the utiliza-
tion of feedback paths definitively vanishes for γf below 5-6dB (see Figs.5.9 and
5.10).
Overall, an interesting problem arising from the above conclusions concerns ac-
tual design of practical space-time codes that approach the performance of Gaus-
sian input signals at low σ2ε and, then, progressively shift to closely mimic behavior
of IU input signals for increasing values of σ2ε .
173

5.8 Appendix F - Derivation of the Throughput Formula
of Sub-Paragraph 5.3.1
To begin with, it is considered the mutual information I(y; φ|H) conditioned
on the available realization H of the channel estimates as
I(y; φ|H) = h(y|H) − h(y|φ, H), (F.1)
where h(·) denotes the differential entropy operator. Since from the assumed chan-
nel model in (5.6) it follows that the conditional r.v. y|φ, H is proper, Gaussian
and with covariance matrix given by
Cov(y|φ, H) =
ITpay +
σ2εTpay
t
⎡⎢⎢⎢⎣φT (Ttr + 1)
...
φT (T )
⎤⎥⎥⎥⎦[φ∗(Ttr + 1) . . .φ∗(T )
]⊗ Ir, (F.2)
it is possible to develop h(y|φ, H) as in (F.1) as below reported
h(y|φ, H)(a)= E φ
lg det
[(πe)rTpayCov(y|φ, H)
](b)= rTpay lg (πe) + rE φ
lg det
[It +
γσ2εT
2pay
t
1
Tpay
T∑n=Ttr+1
φ(n)φ(n)†]
, (F.3)
where (a) follows from the expression for the differential entropy of a proper
complex Gaussian r.v.s [30] while for deriving (b) the properties employed are
det[I + AB] = det[I + BA] and also det[A] = det[AT ]. Now, although the trans-
mitted signal vector φ is assumed proper and Gaussian, nevertheless the corre-
sponding expectation in (F.3) resists closed-form analytical evaluation [10,16,30],
and in any case its computation requires multiple nested numerical integrations
[10,16]. However, since the random vectors φ present in the summation (F.3)
are uncorrelated and equally-distributed (see Paragraph 5.3), the Law of Large
174

Numbers [18, eq.(8.96), p.265] guarantees that for large Tpay = T − Ttr the sample
average 1Tpay
∑Tn=Ttr+1 φ(n)φ(n)† in (F.3) converges (in the mean square sense) to
the corresponding expectation Rφ. Hence, for large Tpay eq.(F.3) assumes the
following limit form:
h(y|φ, H) ≡ rTpay lg (πe)+r lg det[It+
γσ2εT
2pay
tRφ
], (large Tpay). (F.4)
Passing now to consider the first differential entropy h(y|H) −Ey| ˆH
lg p(y|H)reported at the r.h.s. of (F.1), it must be stressed that the conditional pdf p(y|H)
therein present does not admit closed-form representation even in the limit case
of r = t = 1 [6], [7]. However, directly from the channel model in (5.6), it can be
deduced that the conditional random variable y|H is zero-mean and its covariance
equates
Cov(y|H) = (1+γσ2ε)
ITpay ⊗
[Ir +
γTpay
t(1 + γσ2ε)
HTRφH
∗]
. (F.5)
Therefore, argumentations based on the Central Limit Theorem assure that the
resulting bound
h(y|H
) lg
(πe)rTpay det
[Cov
(y|H
)], (F.6)
is satisfied as equality for large values of the number t of transmit antennas. Hence,
the insertion of (F.4),(F.5) into (F.1) directly leads to the relationship (5.12), valid
for large t and Tpay.
Finally, for vanishing values of the product γσ2ε , the relationships (F.3), (F.4)
converge to the same limit rTpay lg(πe) , regardless of Tpay. In addition, for γ → 0
the observation y converges (with Prob.1) to the Gaussian random variable w
(see eq.(5.6)), while for σ2ε → 0 the channel estimates H approach (in the mean-
square sense) actual ones H (see eq.(5.2.a)) so that r.v. y|H converges to the
corresponding Gaussian random variable y|H. These last considerations explicitly
175

prove the validity of (5.12) even under the operating conditions reported in (5.12.b),
(5.12.c).
F.1 Proof of the optimized Power Allocation of eqs. (5.15), (5.16)
After introducing into (5.12) the SVD in (5.13) for H, quite standard (but
tedious) algebraic manipulations allow to put the relationship (5.9) in the following
equivalent form:
TG
(H)
= r lg(1 + γσ2
ε
)+
+ supt∑
i=1P (i) t
Tpay
f (P (1), ..., P (s)) − r
Tpay
t∑i=s+1
lg
(1 +
γσ2εT
2pay
tP (i)
), (F.7)
where
f(P (1), ..., P (s)) s∑
i=1
fi (P(i)) ≡
s∑i=1
[lg (1 + αiP
(i)) − r
Tpay
lg (1 + βP (i))
], (F.8)
is an additive objective function depending only on the powers P (i), 1 ≤ i ≤ sto be allotted to the first s transmit antennas. Thus, since the sup in (F.7) may
be achieved only for P (i) = 0, s + 1 ≤ i ≤ t, (F.7) can be rewritten as in
TG
(H)
= r lg(1 + γσ2
ε
)+ sup
s∑i=1
P (i) tTpay
f (P (1), ..., P (s)) . (F.9)
Now, an examination of the sign of the second derivatives ∂2fi (P(i)) /∂P (i)2
of the logarithmic functions fi (P(i)) in (F.8) leads to the conclusions that the
resulting sum-function f (P (1), ..., P (s)) is guaranteed to be ∩-convex (at-least)
over the region D of Rs given by
D
(P (1), ..., P (s)) : P (i) ≥ max
0,
β−αi
√Tpay/r
βαi
(√Tpay/r−1
), i = 1, ..., s
. (F.10)
176

This last region approaches overall positive orthant Rs+ of Rs when σ2
ε vanishes or
when Tpay grows unbounded. Therefore, after assuming met at least one of the
above operating conditions the Khun-Tucker conditions [22, eqs. (4.4.10),(4.4.11)]
may be applied to search for the constrained maximum of the objective func-
tion in (F.8). From a practical point of view, simple-to-test sufficient conditions
guaranteeing ∩-convexity of the objective function (F.8) over overall positive or-
thant Rs+ for σ2
ε ≥ 0 for any finite value of Tpay ≥ r are the following ones:
λ2i ≥ (1 + σ2
ε)√
rTpay, i = 1, .., s. In fact, when these last are met, all maxs in
(F.10) vanish and then f(·) in (F.8) is ∩-convex over overall Rs+. In all the carried
out numerical tests ascertained for the satisfaction of the above conditions.
So doing, one arrives at the following relationships:
αi(1+αiP(i))−1− r
Tpay
β(1+βP (i))−1 ≤ 1
ρ, for all i such that : P (i) = 0, (F.11)
αi(1+αiP(i))−1− r
Tpay
β(1+βP (i))−1 ≡ 1
ρ, for all i such that : P (i) > 0, (F.12)
where the expression at r.h.s. of (F.11), (F.12) is the derivative of the objective
function (F.8) with respect to i -th variable P (i). Now, eq.(F.11) directly leads to
(5.15), while (F.12) may be rewritten in the following equivalent form:
βP ∗(i)2 +
1 − β
[(1 − r
Tpay
)ρ − 1
αi
]P ∗(i) − ρ
αi
[αi − 1
ρ− βr
Tpay
]= 0,
for P ∗(i) > 0. (F.13)
Therefore, after resolving (F.13) with respect to P (i) and, then, retaining only
the corresponding non negative root, eq. (5.16) is directly obtained.
177

5.9 Appendix G - Derivation of the throughput formula
(5.22)
After rewriting the maximal throughput TIU(H) in (5.11) conveyed by the
channel (5.4) for Isotropic and Unitary matrix input signals Φ as in
TIU
(H)
=1
Tpay
sup‖Φ‖2
Et
h(Y|H
)− h
(Y|Φ, H
), (G.1)
it can be noted that the conditional r.v.s yj|Φ, hj , 1 j r, are zero-mean
independent proper complex Gaussian r.v.s sharing the covariance matrix
Cov(y
j|Φ, hj
)=
σ2εγTpay
tΦΦ† + ITpay , 1 j r. (G.2)
Therefore, for h(Y|Φ, H
)in (G.1) the following developments holds:
h(Y|Φ, H
) −EY|Φ,
ˆH
lg p
(Y|Φ, H
)(a)= r lg
((πe)Tpay det
[ITpay +
σ2εγTpay
tΦΦ†
])=
=(b) r lg
((πe)Tpay det
[It +
σ2εγTpay
tΦ†Φ
])(c)= rTpay lg (πe)+rt lg
(1 +
σ2εγTpay
t
), (G.3)
where (a) follows from (G.1) and above stated statistical properties of r.v.s yj|Φ, hj
, (b) is a consequence of the property det[I + AB] = det[I + BA] and, finally, (c)
accounts for the unitary property of Φ.
About h(Y|H
) −E
Y| ˆH
lg p
(Y|H
)in (G.1), recent contributions [6]
remark that this last resists closed-form analytical evaluation also in the particular
case of σ2ε = 1, so that in the following the analysis is limited to compute it under
assumption of large t. Toward this end, after indicating as vect(Y) the column
vector obtained via the ordered stacking of the r columns of the observed matrix
Y in (5.4), the corresponding conditional r.v. vect(Y)|H is zero-mean and its
covariance matrix may be computed from (5.4) as in
Cov(vect (Y) |H
) E
vect (Y) (vect (Y))†|H
178

= (γTpay/t)(H
T ⊗ ITpay
)EΦ
vect (Φ) (vect (Φ))†
×
×(H
∗ ⊗ ITpay
)+ (γTpay/t)σ
2ε
(Ir ⊗ EΦ
ΦΦ†
)+ IrTpay (G.4)
Since the (equally-distributed) elements of the isotropic random matrix Φ in (G.4)
are zero-mean and rows of Φ are (equally-distributed) random vectors satisfying
the power constraint in (5.3.a), from the Law of Large Numbers [18, p.265] one
may conclude that for large t the sample average (1/t)ΦΦ† converges (in the mean
square sense) to 1/TpayITpay , it can be written
1
tΦΦ† =
1
Tpay
ITpay , (large t) (G.5)
Therefore, after introducing in (G.4) the SVD of H in (5.13), for large t the deter-
minant of the covariance matrix (G.4) converges to the following form:
det[Cov
(vect (Y) |H
)]=(1 + γσ2
ε
)rTpay
det
[ItTpay +
γTpay
t (1 + γσ2ε)
EΦ
vect (Y) (vect (Y))†
(Λ
2 ⊗ ITpay
)]. (G.6)
Now, argumentations based on the Central Limit Theorem assure that for large
t the random variable vect(Y)|H becomes proper and Gaussian so that its differ-
ential entropy approaches the limit form [30]
h(vect (Y) |H
)= lg det
[(πe)rTpay Cov
(vect (Y) |H
)], (large t). (G.7)
Therefore, for large t the exploitation of (G.3),(G.4),(G.6) and (G.7) allows to
rewrite eq.(G.1) as in
CIU
(H)
= r lg
[(1 + γσ2
ε
)/
(1 +
γσ2εTpay
t
)t/Tpay]
+
+(1/Tpay) sup‖Φ‖2
Et
lg det
[ItTpay +
γTpay
t (1 + γσ2ε)
EΦ
vect (Φ) (vect (Φ))†(
Λ2 ⊗ ITpay
)].(G.8)
179

Since Λ in (G.8) is a diagonal matrix (see(5.13.a)), an application of the
Hadamard inequality [19, p.502] guarantees that sup in (G.8) is attained only
when the signal covariance matrix EΦ
vect (Φ) (vect (Φ))†
is diagonal. As a
consequence, it can be possible to rewrite (G.8) in the following form:
CIU
(H)
= r lg
[(1 + γσ2
ε
)/
(1 +
γσ2εTpay
t
)t/Tpay]
+
+(1/Tpay) sup‖Φ‖2
Et
s∑
j=1
T∑n=Ttr+1
lg
[1 +
γTpay
t (1 + γσ2ε)
λ2jE
‖φj(n)‖2] , (G.9)
where φj(n) is the signal-sample radiated by j-th transmit antenna during n-th slot
of the payload phase. Since the channel matrix H is constant during the payload
phase, values assumed by expectations E‖φj(n)‖2 in (G.9) must be independent
from the payload-index n. In addition, the unitary property in (5.10) constraints
the summation∑T
n=Ttr+1 E‖φj(n)‖2 to be unit for any index j. Therefore, as
a direct consequence of the above two constraints, each expectation E‖φj(n)‖2
in (G.9) must equate 1/Tpay, regardless of n and j. Hence, after replacing the
expectations in (G.9) by 1/Tpay, (5.22) is directly derived.
180

5.10 Appendix H - Derivation of the outage bounds (5.37),(5.38)
After assuming t ≤ r, µ1 ≥ µ2 ≥ . . . ≥ µt indicate the magnitude-ordered
eigenvalues of the (t × t) complex Wishart-matrix
W 2
1 − σ2ε
HH†. (H.1)
Therefore, since αi in (5.14.a) may be rewritten as αi = γµiTpay(1 − σ2ε)/(2t(1 +
γσ2ε)), a direct exploitation of the relationship (5.19) allows to express the proba-
bility P (TG(H) ≤ η) as in
P (TG(H) ≤ η) = P (χ ≤ η−r lg(1+γσ2ε)), (H.2)
where the real-values r.v. χ is defined as
χ supt∑
i=1P (i)t/Tpay
t∑i=1
lg
(1 +
(1 − σ2ε) γTpay
2t (1 + γσ2ε)
P (i)µi
)
− (r/Tpay) lg
(1 +
γσ2ε
tT 2
payP (i)
). (H.3)
Although the joint pdf of the eigenvalues µ(i), 1 ≤ i ≤ 1 of the Wishart
matrix in (H.1) is well-know [21], nevertheless the computation of the pdf of the
r.v. (H.3) resists closed-form expression even in the limit cases of σ2ε → 0 and
σ2ε → 1 [10, 16 and references therein]. Therefore, in the remaining part of this
Appendix upper and lower bounds the r.v. χ in (H.3) are derived.
H.1 The Upper-Bound (5.37)
By generalizing a simple power allocation strategy originally pursued in [35,
p.213] for ADSL applications, it has been recently remarked in [23] that for large
181

t and at medium-high SNRs an effective (although sub-optimal) power allocation
policy consists to assign equal powers to the first τ ≥ 1 transmit antennas and
thus turn off the last (t − τ) ones, according to the following ON-OFF like law:
P (i) t
τTpay
, 1 ≤ i ≤ τ and P (i) 0, τ + 1 ≤ i ≤ t. (H.4)
Therefore, after replacing the above ON-OFF power allocation (H.4) in (H.3),
the resulting r.v.
Θ t∑
i=1
lg
(1 +
(1 − σ2ε) γTpay
2t (1 + γσ2ε)
µiP (i)
)− r
Tpay
lg
(1 +
γσ2ε
tT 2
payP (i)
)≡
≡ − (rτ/Tpay) lg
(1 +
γσ2εTpay
τ
)+
τ∑i=1
lg
(1 +
(1 − σ2ε) γ
2τ (1 + γσ2ε)
µi
), (H.5)
obviously lower bounds the χ one in (H.3). Thus, the probability in (H.2) can be
upper bounded as
P(TG
(H)
η)
P(Θ η − r lg
(1 + γσ2
ε
)) ≡≡ P
(lg det
[Iτ +
(1 − σ2ε) γ
2τ (1 + γσ2ε)
diag µ1, ..., µτ]
k
), (H.6)
where
k η + r lg
⎡⎢⎣(1 + γσ2
εTpay
τ
)τ/Tpay
1 + γσ2ε
⎤⎥⎦ . (M.7)
Afterwards, after exploiting the inequality det[I+A] ≥ 1+Tra[A] holding for any
covariance matrix, (H.6) may be upper bounded as
P(TG
(H)
η)
P (v Th1 (η, τ)) , (H.8)
where Th1(η, τ) is given by (5.37.a) and v ∑τ
i=1 µi is the summation of first
τ eigenvalues of Wishart matrix in (H.1). Since v is a centered chi-square r.v.
182

with 2rτ degrees of freedom [2,21], for any assigned τ the probability at the r.h.s.
of (H.8) may be directly computed by resorting to the cumulative distribution
function of v, reported, for example in [34.p.42]. The resulting limit upper bounds
the outage P (TG(H) ≤ η) for any τ and then the focus is on the choice τ so to
minimize this bound. So doing, relationship (5.37) is directly obtained.
H.2 The Lower-Bound (5.38)
For lower-bounding P (TG(H) ≤ η) in (H.2), it can be possible to proceed
to upper bound the r.v. χ defined in (H.3). For this purpose, under constraint∑ti=1 P (i) = t/Tpay, the second summation in (H.3) achieves its minimum when
only one P (i) is strictly positive, so that the following lower bound takes place:
mint∑
i=1P (i)=t/Tpay
t∑
i=1
lg
(1 +
γσ2ε
tT 2
payP (i)
)≡ lg
(1 + γσ2
εTpay
). (H.9)
Therefore, after indicating as µmax the largest eigenvalue of the Wishart matrix
W in (H.1), it can be possible to proceed to upper bound χ in (H.3) according to
the following developments:
χ(a)
supt∑
i=1P (i)=t/Tpay
t∑
i=1
lg
(1 +
(1 − σ2ε)
2t (1 + γσ2ε)
µmaxP (i)
)− r
Tpay
lg(1 + γσ2
εTpay
)(b)
t lg
(1 +
(1 − σ2ε) γ
2t (1 + γσ2ε)
µmax
)− r
Tpay
lg(1 + γσ2
εTpay
), (H.10)
where (a) follows from (H.9) and definition of µmax, while (b) arises from an appli-
cation of the Jensen’s inequality. Although no closed-form expression is available
for the pdf of µmax [21], nevertheless µmax is upper-bounded by the Euclidean norm
‖W‖E of the corresponding Wishart matrix W [20, p.359], so that directly from
(H.1) it is possible to obtain the following chain of inequalities:
µmax ‖W‖E 2
1 − σ2ε
∥∥∥H∥∥∥2
E≡ 2
1 − σ2ε
r∑j=1
t∑i=1
∥∥∥hji
∥∥∥2
Ψ. (H.11)
183

Hence, after introducing (H.11) in to (H.10), it is possible to lower bound (H.2) as
in
P(TG
(H)
η)
P (Ψ Th2 (η)) , (H.12)
where Th2(·) is given by (5.38.a). Finally, after noting that the r.v. Ψ in (H.11)
is chi-square distributed with 2rt degrees of freedom [34, p.42], the lower bound
(5.38) directly arises from (H.12).
184

5.11 Appendix I - Derivation of the Outage Bounds (5.40),
(5.41)
After inserting (H.1) into (5.22), the outage probability P (TIU(H) ≤ η) may
be developed as in
P(TIU
(H)
η)
= P
⎛⎜⎝ζ η + r lg
⎡⎢⎣(1 + γσ2
εTpay
t
)t/Tpay
1 + γσ2ε
⎤⎥⎦⎞⎟⎠ , (I.1)
where ζ is the real nonnegative r.v. defined as (see (H.1))
ζ lg det
[It +
(1 − σ2ε) γ
2t (1 + γσ2ε)
W
]≡
t∑j=1
lg
(1 +
(1 − σ2ε) γ
2t (1 + γσ2ε)
µj
). (I.2)
I.1 The Upper Bound (5.40)
Thus, by resorting once a time to the inequality : det[I + A] ≥ 1 + Tra[A], it
may possible to lower bound the r.v. ζ in (I.2) as in
ζ lg
[1 +
(1 − σ2ε) γ
2t (1 + γσ2ε)
(t∑
j=1
µj
)]. (I.3)
Therefore, since the trace:t∑
j=1
µj of the Wishart matrix in (H.1) is a chi-square
distributed r.v. with 2rt degrees of freedom, eqs. (I.1), (I.2), (I.3) give arise to the
upper bound (40).
I.2 The Lower Bound (5.41)
By applying the Jensen’s inequality to (I.2), the r.v. ζ results upper bounded
as in
ζ t lg
[1 +
(1 − σ2ε) γ
2t2 (1 + γσ2ε)
(t∑
j=1
µj
)]. (I.4)
185

Therefore, after inserting (I.4) into (I.1) and, then, by resorting to the above
mentioned chi-square cumulative distribution function of the trace of the Wishart
matrix W, it is possible to directly arrive at the lower-bound (5.41).
186

References
[1] R.Becher, M.Dillinger, M.Haadart, W.Mohr, ”Broad-Band Wireless Accessand Future Communication Networks”, Proc. of IEEE, vol.89, no.1,pp.58-74,Jan.2001.
[2] G.J. Foschini, M.J.Gans, ”On limit of wireless communications in fading en-vironments when using multiple antennas”, Wireless Personal Comm., vol.6,no.3 pp.311-325, June 1998.
[3] J.Salz, J.H. Winters, ”Effect of fading correlation on adaptive arrays in digitalmobile radio”, IEEE Trans. on Veh. Techn., vol.43, no.3, pp.1049-1056, 1994.
[4] T.L. Marzetta, B.M. Hochwald, ”Capacity of a mobile Multiple-Antenna Com-munication Link in Rayleigh Flat Fading”, IEEE Trans. on Inf. Theory, vol.45,no.1, pp.139-157, January 1999.
[5] B.M. Hochwald, T.L.Marzetta, ”Unitary Space-Time Modulation for Multiple-Antenna Communications in Rayleigh Flat Fading”, IEEE Trans. on Inform.Theory, vol.16, no.2, pp.543-564, March 2000.
[6] B.Hassibi, T.L.Marzetta, ”Multiple-Antennas and Isotropically Random Uni-tary Inputs: the recevied Signal Density in closed form”, IEEE Trans. on In-form. Theory, vol.48, no.6 pp.1473-1485, June 2002.
[7] B.M.Hochwald, T.L.Marzetta, B.Hassibi, ”Space-Time Autocoding”, IEEETrans. on Inform. Theory, vol.47, no.7, pp.2761-2781, November 2001.
[8] E.Vitotsky, U.Madhow, ”Space-Time Transmit Precoding with Imperfect Feed-back”, IEEE Trans. on Inform. Theory, vol.47, no.6, pp.2632-2639, September2001.
[9] S.Zhou, G.B.Giannakis, ”Optimal transmitter Eigen-Beamforming and Space-Time Block Coding, based on Channel-Mean”, Proc. of ICASSP 2002, pp.2853-2856, Orlando (FL), May 2002.
[10] C.-N.Chuan, N.D.S.Tse, J.M.Kahn, R.A.Valenzuela, ”Capacity-scaling inMIMO Wireless System Under Correlated Fading”, IEEE Trans. on Inform.Theory, vol.48, no.3, pp.637-650, March 2002.
[11] R.D.Murch, K.B.Letaief, ”Antenna Systems for Broadband Wireless Access”,IEEE Comm. Mag.,pp.637-650, March 2002.
187

[12] J.-C.Guey, M.P.Fitz, M.R.Bell, W.-Y.Kuo, ”Signal Design for TransmitterDiversity Wireless Communication Systems Over Rayleigh Fading Channels”,IEEE Trans. on Comm., vol.47, no.4, pp.527-537, April 1999.
[13] J.Baltarsee, G.Fock, H.Meyr, ”Achievable Rate of MIMO Channels withData-Aided Channel-estimation and perfect Interleaving”, IEEE Journ. of Sel.Areas in Comm., vol.19, no.12, pp.2358-2368, December 2001.
[14] B.Hassibi, B.M.Hochwald, ”How much training is needed in multiple-antennawireless links?”, IEEE Trans. on Inform. Theory, vol.49, no.4, pp.951-963, April2003.
[15] L.Zheng, D.N.C.Tse, ”Communication on the Grassman Manifold: A Geomet-ric Approach to the Noncoherent Multiple-Antenna Channel”, IEEE Trans. onInform. Theory, vol.48, no.2, pp.359-383, February 2002.
[16] H.Bolcskei, D.Gesbert, A.J.Paulraj, ”On the capacity of OFDM-based Spa-tial Multiplexing Systems”, IEEE Trans. on Comm., vol.50, no.2, pp225-234,February 2002.
[17] B.M.Hochwald, W.Sweldens, ”Differential Unitary Space-Time Modulation”,IEEE Trans. on Comm., vol.48, no.12, pp.2041-2052, December 2000.
[18] A.Papoulis, Probability, Random Variables and Stochastic Proceses, McGrawHill, 1965.
[19] T.M.Cover, J.A.Thomas, Elements of Information Theory, Wiley, 1991.
[20] P.Lancaster, M.Tismenetsky, The Theory of Matrices, Second Edition, Aca-demic Press, 1985.
[21] A.Edelman, ”Eigenvalues and condition numbers of random matrices”, Ph.D.Dissertation, Math. Dept., M.I.T., 1989.
[22] R.G.Gallagher, Information Theory and Reliable Communication, Wiley,1968.
[23] R.S.Blum, J.H.Winters, ”On optimum MIMO with antenna selection”, IEEEComm. Lett., vol.6, no.8, Aug. 2002 pp. 322-324, August 2002.
[24] G.T.Okamoto, Smart Antenna Systems and Wireless LANs, Kluwert 2001.
[25] E.Baccarelli, ”Evaluation of the Reliable Data Rates Supported by Multiple-Antenna Coded Wireless Links for QAM Transmission”, IEEE Journ. of Sel.Areas in Comm., vol.19, no.2, pp.295-304, February 2001.
188

[26] E.Baccarelli, M.Biagi, A.Fasano, ”Optimized Design and Performance ofMultiple-Antenna 4th-generation WLANs for Partially-Coherent Decoding”,European Wireless 2002, Florence, February 2002.
[27] E.Baccarelli, M.Biagi, ”A Water-Filling based Approach for power allocationfor Multiple-Antenna Rayleigh Flat-fading systems with Partially-Coherent De-tection”, IEEE VTC-Fall 2002, Vancouver, Canada, September 2002.
[28] E.Baccarelli, M.Biagi, ”A New Family of Space-Time Block Codes for Multi-Antenna Systems with Imperfect Channel Estimation”, IEEE InternationalSymposium on Advances in Wireless Communication (ISWC’02), Victoria,Canada, September 2002.
[29] M.Medard, ”The effect upon channel-capacity in Wireless Communicationsof Perfect and Imperfect Knowledge of the channel”, IEEE Trans. on Inform.Theory, vol.46, no.3, pp.933-946, May 2000.
[30] I.E.Telatar, ”Capacity of Multiple Antenna Gaussian Channels”, Europ.Trans. on Telecom., vol.10, pp.585-595, November 1999.
[31] S.Verdu, T.S.Han, ”A General Formula for Channel Capacity”, IEEE Trans.on Inform. Theory, vol.40, no.6, pp.1147-1157, July 1994.
[32] E.Baccarelli, R.Cusani, ”Linear Feedback Communication Systems withMarkov Sources: Optimal system design and perforamnce Evaluation, IEEETrans. on Inform. Theory, vol.41, no.6, pp.1868-1876, November 1995.
[33] D.W.Bliss, K.W.Forsythe, A.O.Hero, A.F.Yegulalp, ”Environmental Issuesfor MIMO Capacity”, IEEE Trans. on Sign. Proc., vol.50, no.9, pp.2128-2142,September 2002.
[34] J.G.Proakis, Digital Communications, 4th Edition, McGraw-Hill, 2000.
[35] T.Starr, J.M.Cioffi, P.J.Silverman, Understanding Digital Subscriver LineTechnology, Prentice Hall, 1999.
[36] E.Biglieri, G.Caire, G.Taricco, ”Limiting Performance of Block-Fading Chan-nels with Multiple Antennas”, IEEE Tr. on Inform. Theory, vol.47, no.4,pp.1273-1289, May 2001.
[37] L.H.Ozarow, S.Shamai,A.D.Wynes, ”Information theorethic considerations
for cellular mobile radio”, IEEE Tr. on Vehicular Tech., vol.43, pp.359-378,
May 1994.
189