chapter3(3.1~3.5)
DESCRIPTION
AlinTRANSCRIPT

Chapter 3 Vectors in 2-Space and 3-Space
Chapter Contents
3.1 Introduction to Vectors (Geometric) 3.2 Norm of a Vector; Vector Arithmetic 3.3 Dot Product; Projections 3.4 Cross Product 3.5 Lines and Planes in 3-Space
3.1 Introduction to Vectors (Geometric)
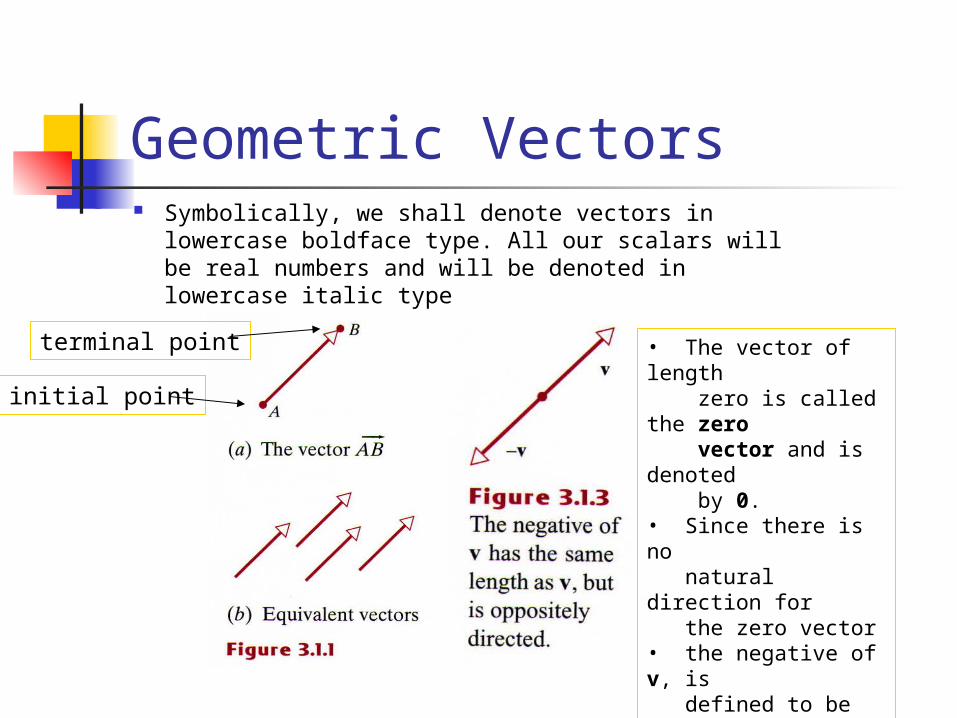
Geometric Vectors Symbolically, we shall denote vectors in lowercase
boldface type. All our scalars will be real numbers and will be denoted in lowercase italic type
initial point
terminal point • The vector of length zero is called the zero vector and is denoted by 0. • Since there is no natural direction for the zero vector • the negative of v, is defined to be the vector having the same magnitude as v, but oppositely directed.
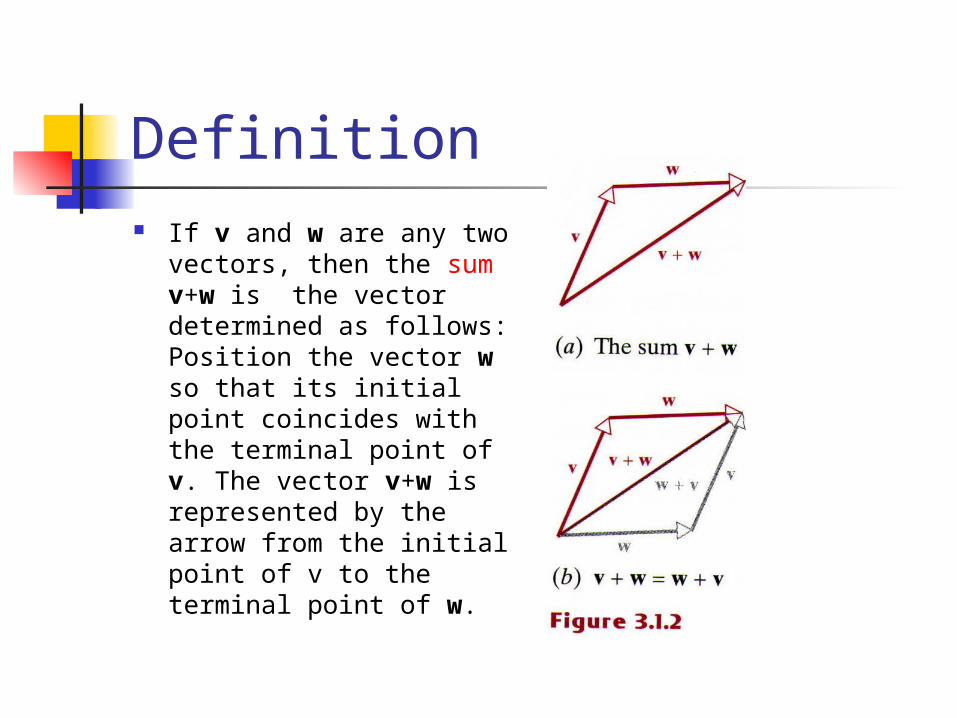
Definition If v and w are any two
vectors, then the sum v+w is the vector determined as follows: Position the vector w so that its initial point coincides with the terminal point of v. The vector v+w is represented by the arrow from the initial point of v to the terminal point of w.
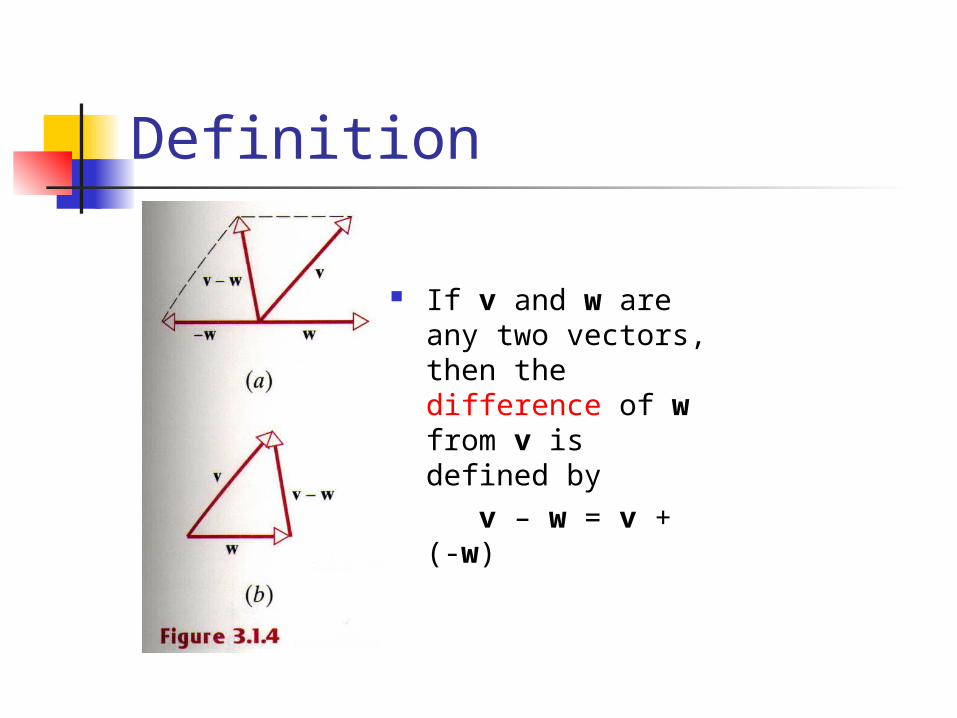
Definition
If v and w are any two vectors, then the difference of w from v is defined by v – w = v + (-w)
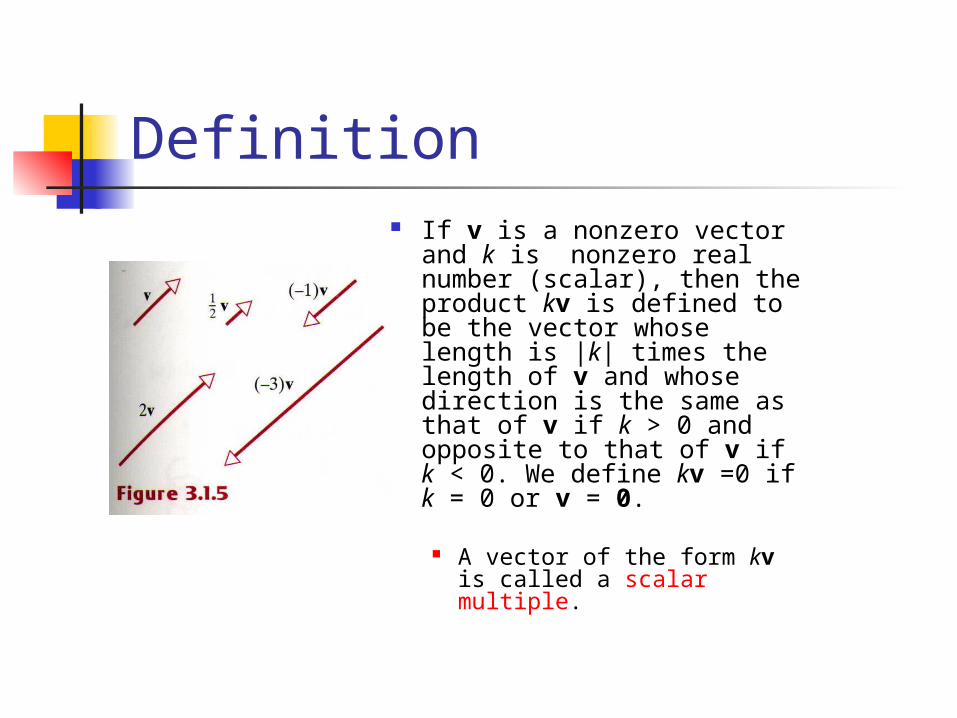
Definition If v is a nonzero vector
and k is nonzero real number (scalar), then the product kv is defined to be the vector whose length is |k| times the length of v and whose direction is the same as that of v if k > 0 and opposite to that of v if k < 0. We define kv =0 if k = 0 or v = 0.
A vector of the form kv is called a scalar multiple.

Vectors in coordinate Systems(1/2)
In Figure 3.1.6, that v has been positioned so its initial point is at the origin of a rectangular coordinate system. The coordinates of the terminal point of v are called the components of v, and we write ),( 21 vvv
21,vv

Vectors in coordinate Systems(2/2)
If two vectors are
equivalent if and only if and
),( and ),( 2121 wwwvvv
2211 and wvwv
Vectors in 3-Space (1/4)
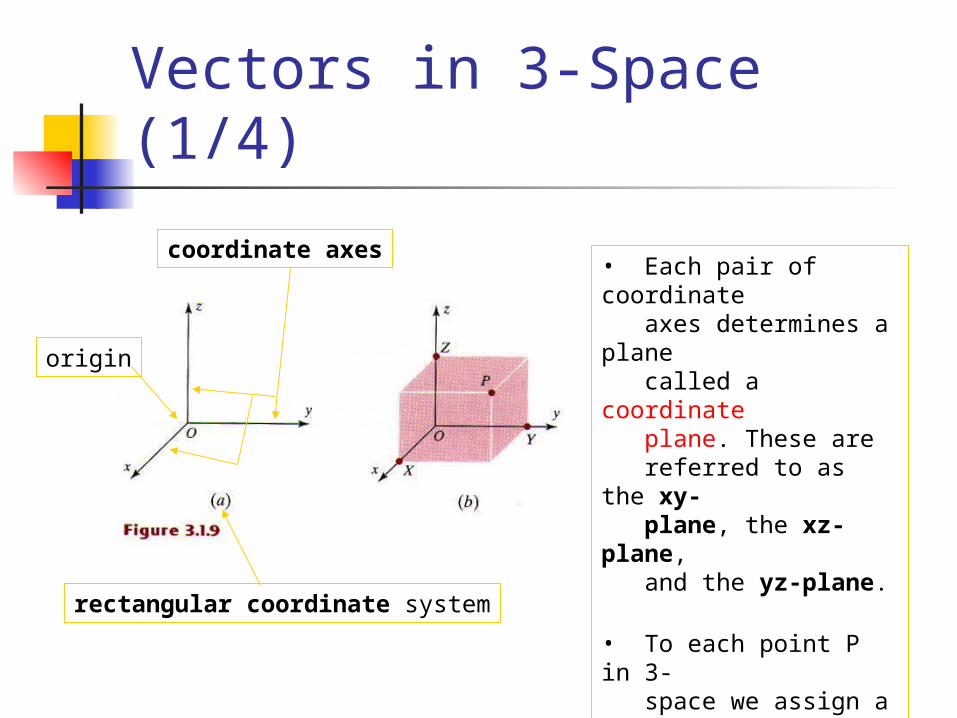
rectangular coordinate system
origin
coordinate axes• Each pair of coordinate axes determines a plane called a coordinate plane. These are referred to as the xy- plane, the xz-plane, and the yz-plane.
• To each point P in 3- space we assign a triple of numbers (x, y, z), called the coordinates of P.
Vectors in 3-Space (2/4)
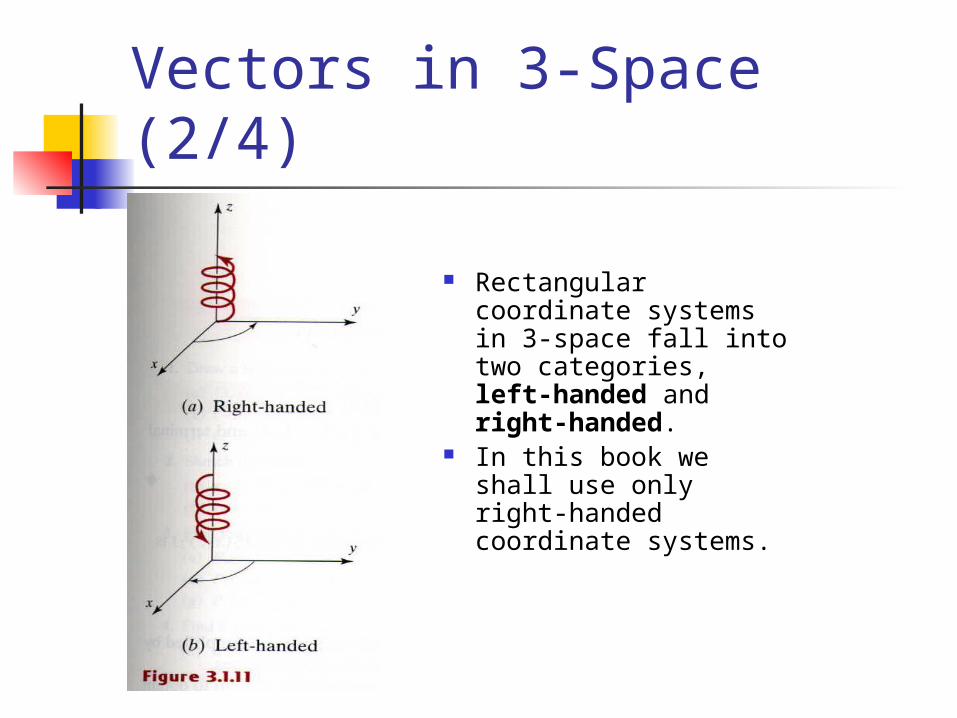
Rectangular coordinate systems in 3-space fall into two categories, left-handed and right-handed.
In this book we shall use only right-handed coordinate systems.
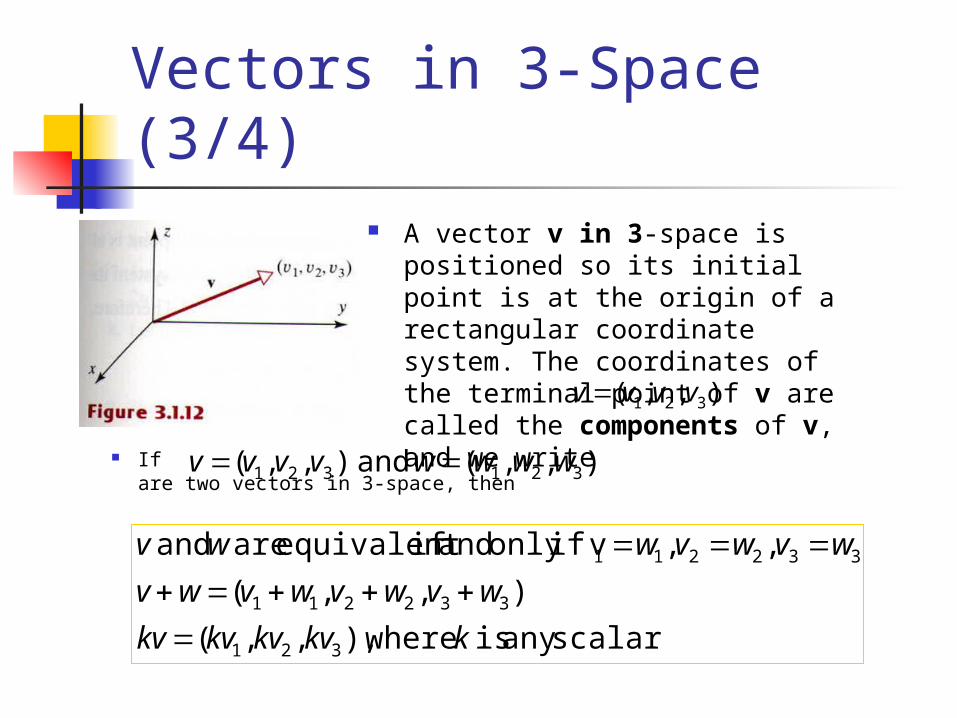
Vectors in 3-Space (3/4) A vector v in 3-space is
positioned so its initial point is at the origin of a rectangular coordinate system. The coordinates of the terminal point of v are called the components of v, and we write
),,( 321 vvvv
),,( and ),,( 321321 wwwwvvvv If are two vectors in 3-space, then
scalarany is where),,,(
),,(
,, vifonly and if equivalent are and
321
332211
332211
kkvkvkvkv
wvwvwvwv
wvwvwwv
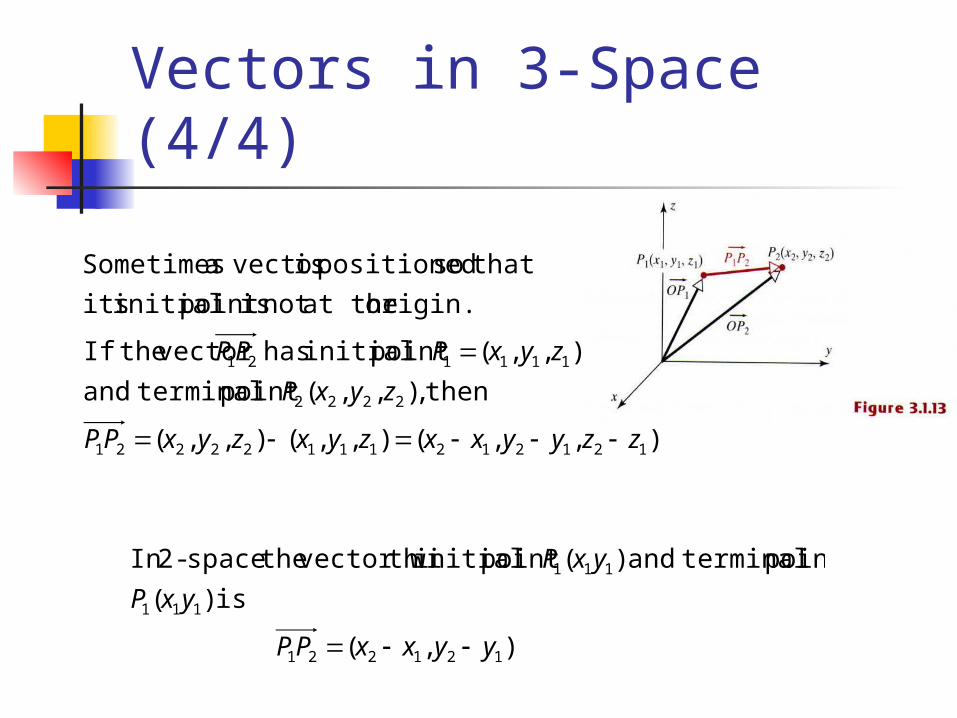
Vectors in 3-Space (4/4)
),(
is )(
point terminaland )(point initialth vector wi thespace-2In
),,(),,(),,(
then ,),,(point terminaland
),,(point initial has vector theIf
origin. at thenot ispoint initial its
that so positioned is vector a Sometimes
121221
111
111
12121211122221
2222
111121
yyxxPP
yxP
yxP
zzyyxxzyxzyxPP
zyxP
zyxPPP
Example 1Vector Computations with Components
If v=(1,-3,2) and w=(4,2,1),then
v + w=(5,-1,3), 2v=(2,-6,4) -w=(-4,-2,-1),
v – w=v + (-w)=(-3,-5,1)
Example 2Finding the components of a Vector
)12,6,5()4)8(),1(5,27(
are )8,5,7(point terminaland
)4,1,2(point initial with vector theof components The
2
121
v
P
PPPv
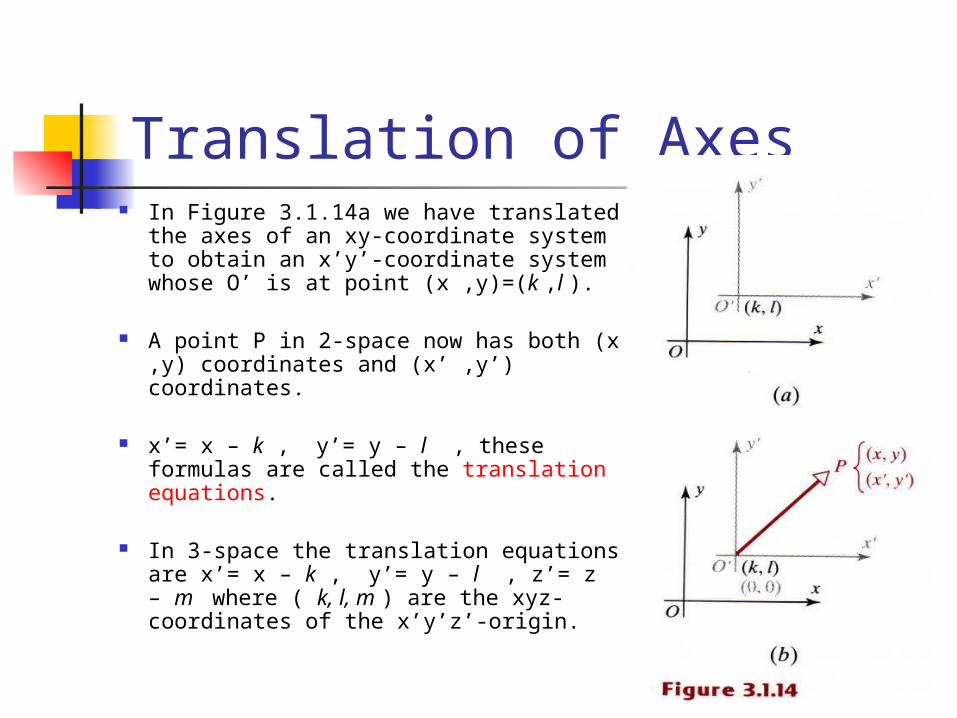
Translation of Axes In Figure 3.1.14a we have translated
the axes of an xy-coordinate system to obtain an x’y’-coordinate system whose O’ is at point (x ,y)=(k ,l ).
A point P in 2-space now has both (x ,y) coordinates and (x’ ,y’) coordinates.
x’= x – k , y’= y – l , these formulas are called the translation equations.
In 3-space the translation equations are x’= x – k , y’= y – l , z’= z – m where ( k, l, m ) are the xyz-coordinates of the x’y’z’-origin.
Example 3Using the Translation Equations (1/2)
Suppose that an xy-coordinate system is translated to obtain an x’y’-coordante system whose origin has xy-coordinates (k ,l )=(4,1).
(a) Find the x’y’-coordinate of the point with the xy-coordinates P(2,0) (b) Find the xy-coordinate of the point with the x’y’-coordinates Q(-1,5)

Solution (a). The translation equations are x’=x-4, y’=y-1 so the x’y’-coordinate of P(2,0) are x’=2-4=-2 and y’=0-1=-1. Solution (b). The translation equations in (a) can be
written as x=x’+4, y=y’+1 so the xy-coordinate of Q are x=-1+4=3 and y=5+1=6.
Example 3Using the Translation Equations (2/2)
3.2 Norm of a Vector; Vector Arithmetic
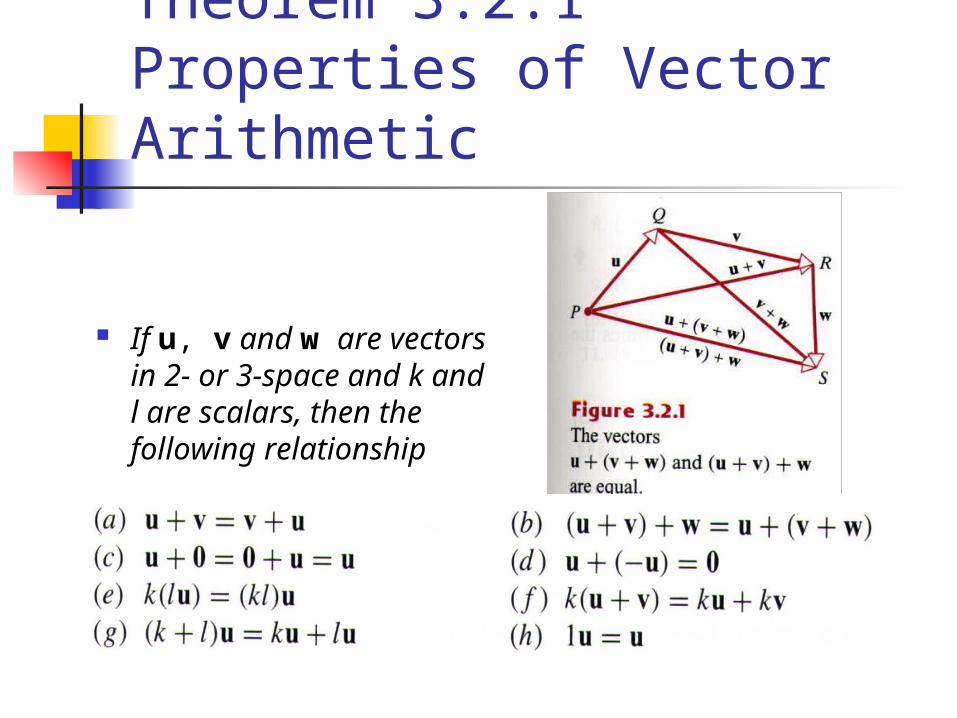
Theorem 3.2.1Properties of Vector Arithmetic
If u, v and w are vectors in 2- or 3-space and k and l are scalars, then the following relationship

Norm of a Vector (1/2) The length of a vector u is often called
the norm of u and is denoted by .
Figure (a): it follows from the Theorem of Pythagoras that the norm of a vector
in 2-space is
Figure (b): Let be a vector in 3-space.
A vector of norm 1 is called a unit vector.
u
),( 21 uuu 22
21 uuu
23
22
21 uuuu
),,( 321 uuuu

Norm of a Vector (2/2) If
are two points in 3-space, then the distance s between them is the norm of vector
Similarly in 2-space:
the length of the vector ku :
),,( and ),,( 22221111 zyxPzyxP
),,(
12121221
21
zzyyxxPP
PP
ukku

Example 1Finding Norm and Distance
11244)51()13()24(
is )1,3,4(P and (2,-1,5)P points ebetwwen th d distance The
14)1()2()3(u
is ) (-3,2,1u vector theof norm The
222
21
222
d
3.3 Dot Product; Projections
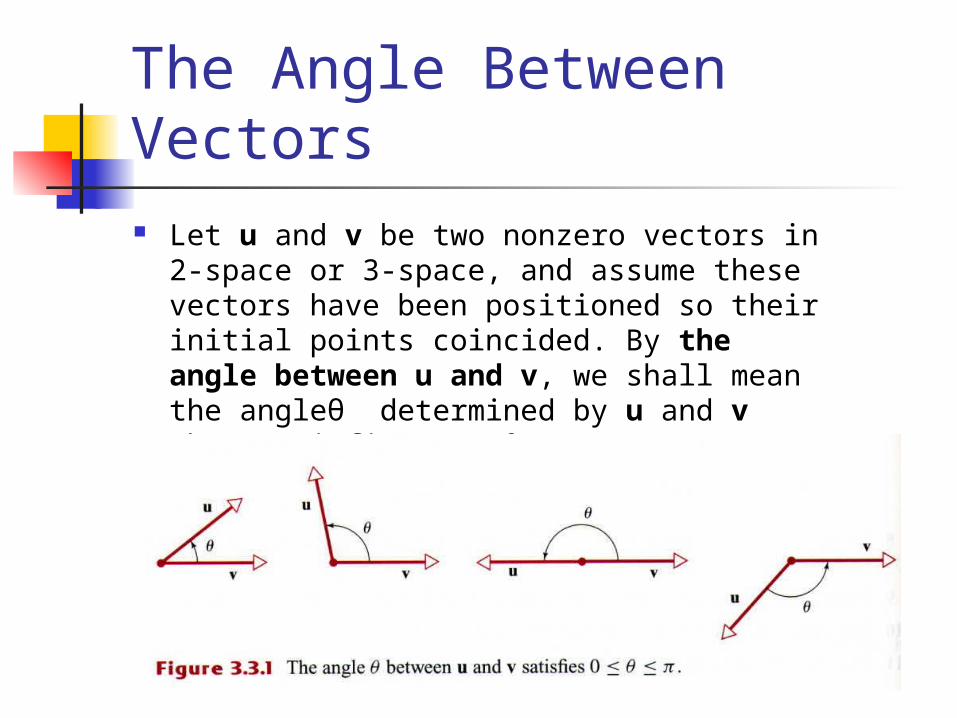
The Angle Between Vectors Let u and v be two nonzero vectors in 2-
space or 3-space, and assume these vectors have been positioned so their initial points coincided. By the angle between u and v, we shall mean the angleθ determined by u and v that satisfies 0 ≤ θ ≤ π.
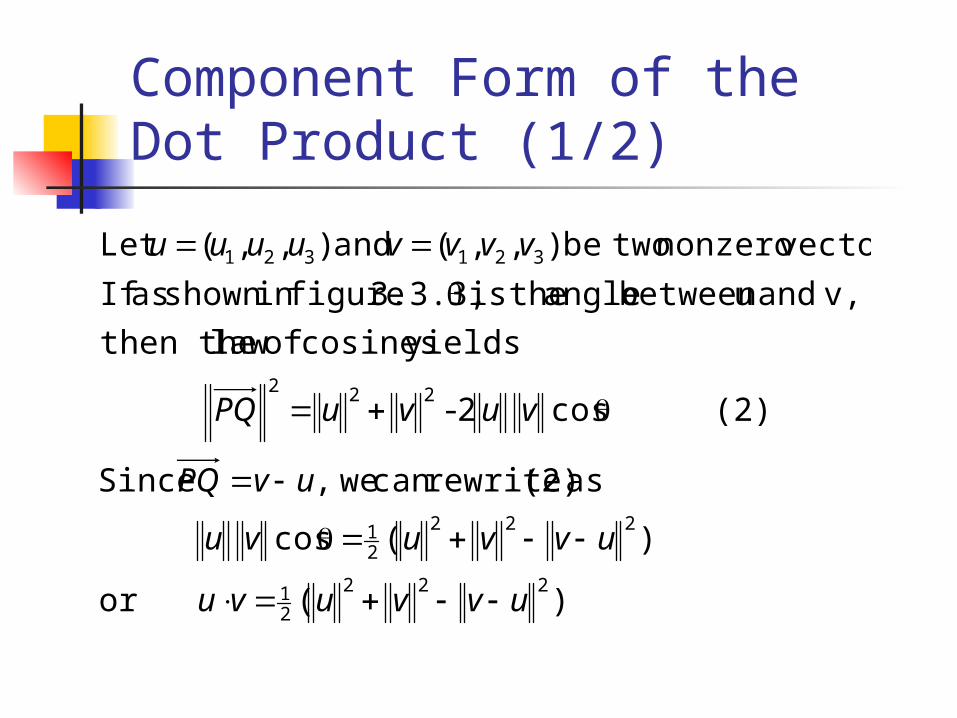
Component Form of the Dot Product (1/2)
)( or
)( cos
as (2) rewritecan we, Since
(2) cos 2-
yields cosines of law then the
v,andu between angle theis 3.3.3, figurein shown as If
vectors.nonzero twobe ),,( and ),,(Let
222
21
222
21
222
321321
uvvuvu
uvvuvu
uvPQ
vuvuPQ
vvvvuuuu
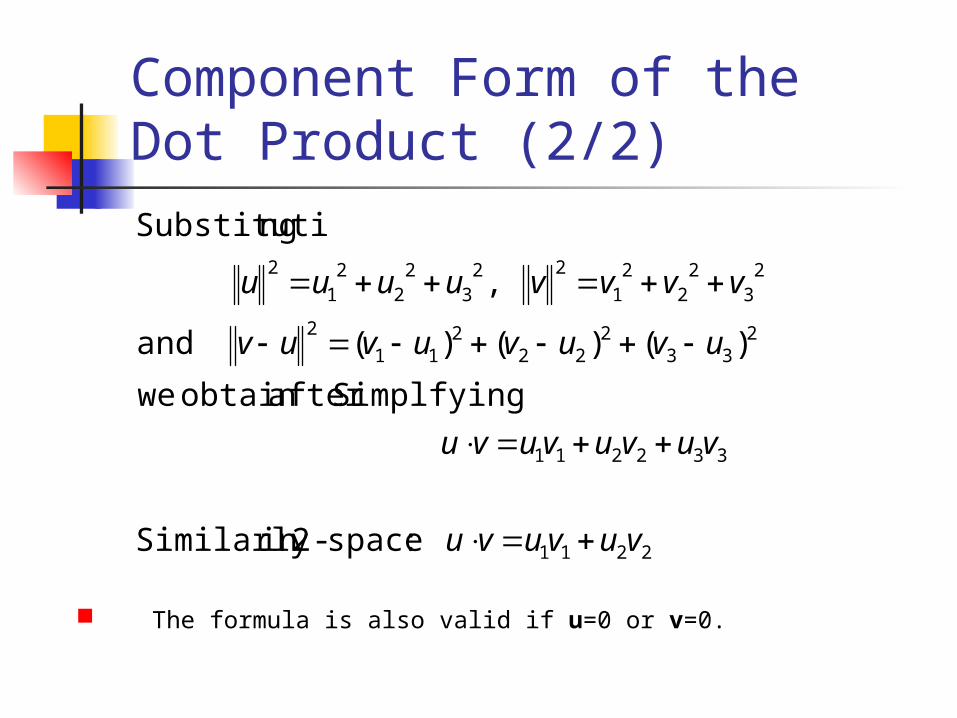
Component Form of the Dot Product (2/2)
2211
332211
233
222
211
2
23
22
21
223
22
21
2
: space-2in Similarly
Simplfyingafter obtain we
)()()( and
,
ngSubstituti
vuvuvu
vuvuvuvu
uvuvuvuv
vvvvuuuu
The formula is also valid if u=0 or v=0.
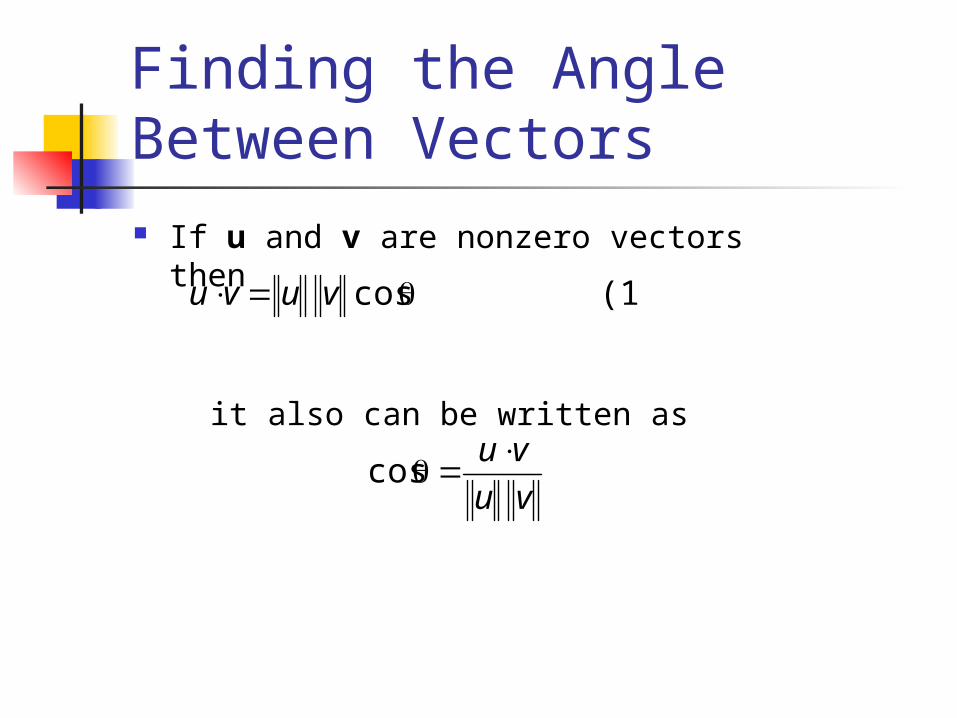
Finding the Angle Between Vectors If u and v are nonzero vectors then
it also can be written as
vu
vu
vuvu
cos
(1) cos
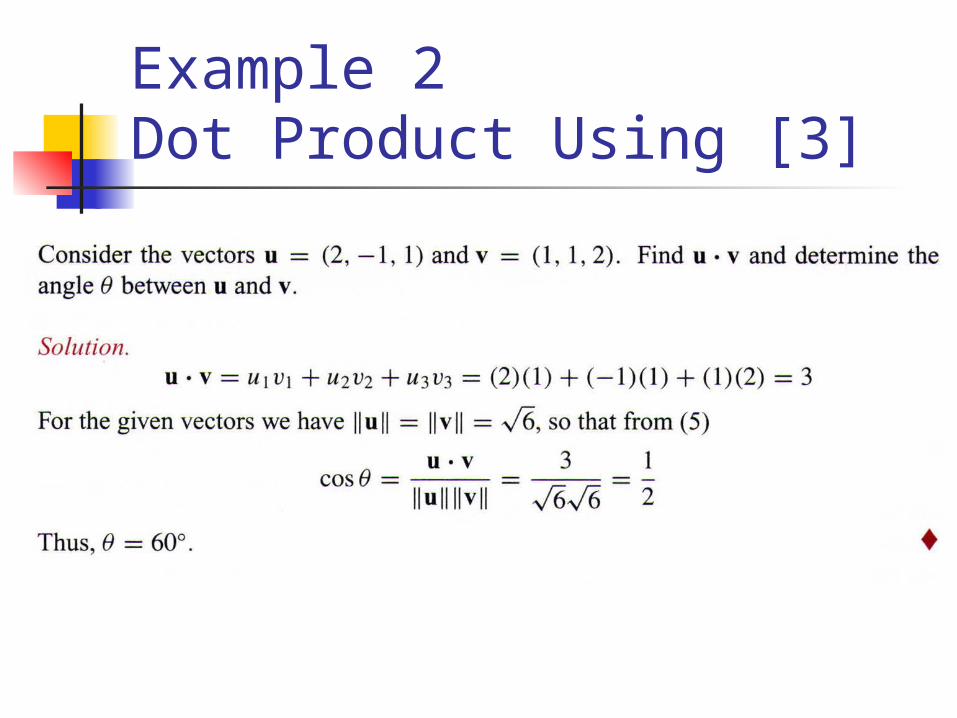
Example 2Dot Product Using [3]

Example 4Finding Dot products from Components
Orthogonal Vectors Perpendicular vectors are also called
orthogonal vectors. In light of Theorem 3.l.1b, two nonzero
vectors are orthogonal if and only if their dot product is zero.
To indicate that u and v are orthogonal vectors we write u ⊥v.

Example 5A Vector Perpendicular to a Line Show that in 2-space the nonzero vector
n=(a,b) is perpendicular to the line ax+by+cz=0.
Solution
lar.perpendicu are and Thus,
0or 0),(),(
form in the expressed becan which
0)()(
obtain we(6)in equations the
gsubtractinon But lar.perpendicu are andn that showonly need we
3.3.5), (Figure line thealong runs ),( vector theSince
(6) 0
0
thatso line, on the pointsdistinct be ),( and ),(Let
21
211212
1212
21
121221
22
11
222111
PPn
PPnyyxxba
yybxxa
PP
yyxxPP
cbyax
cbyax
yxPyxP
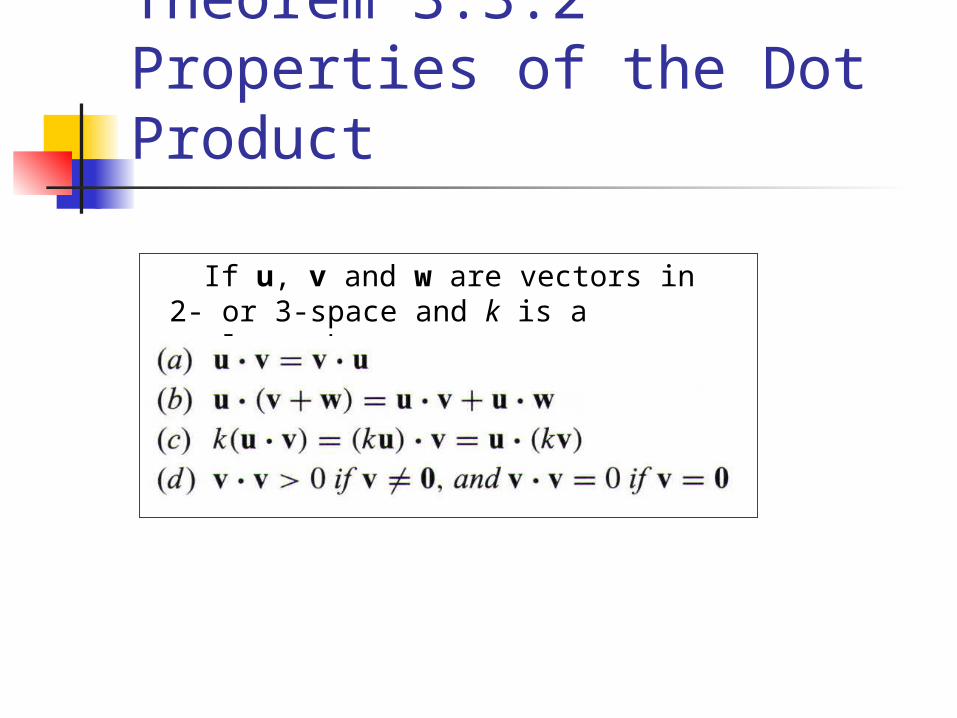
Theorem 3.3.2Properties of the Dot Product
If u, v and w are vectors in 2- or 3-space and k is a scalar, then:

An Orthogonal Projection (1/2)
To "decompose" a vector u into a sum of two terms, one parallel to a specified nonzero vector a and the other perpendicular to a.
Figure 3.3.6: Drop a perpendicular from the tip of u to the line through a, and construct the vector w1 from Q.
Next form the difference:uwuwwwwuw )( then 112112
An Orthogonal Projection (2/2)
The vector w1 is called the orthogonal projection of u on a or sometimes the vector component of u along a. It is denoted by
The vector w1 is called the vector component of u orthogonal to a. Since we have , this vector can be written in notation (7) as
(7) uproja
uprojuw a 2
12 wuw

Example 6Vector Component of u Along a
zero. isproduct dot their
that showingby lar perpendicu are and vector t theVerify tha
),,(),,()3,1,2(
is a toorthogonalu ofcomponent vector theand
),,()2,1,4(
is a alongu ofcomponent vector theThus,
212)1(4
15)2)(3()1)(1()4)(2(
a. toorthogonalu ofcomponent vector theand
a alongu ofcomponent vector theFind .)2,1,4( and )3,1,2(Let
711
72
76
710
75
720
710
75
720
2115
2
2222
auproju
uproju
aa
auuproj
a
au
au
a
a
a
Solution :
Example 7Distance Between a Point and a Line (1/2)
221010010100
0
0
0
11
000
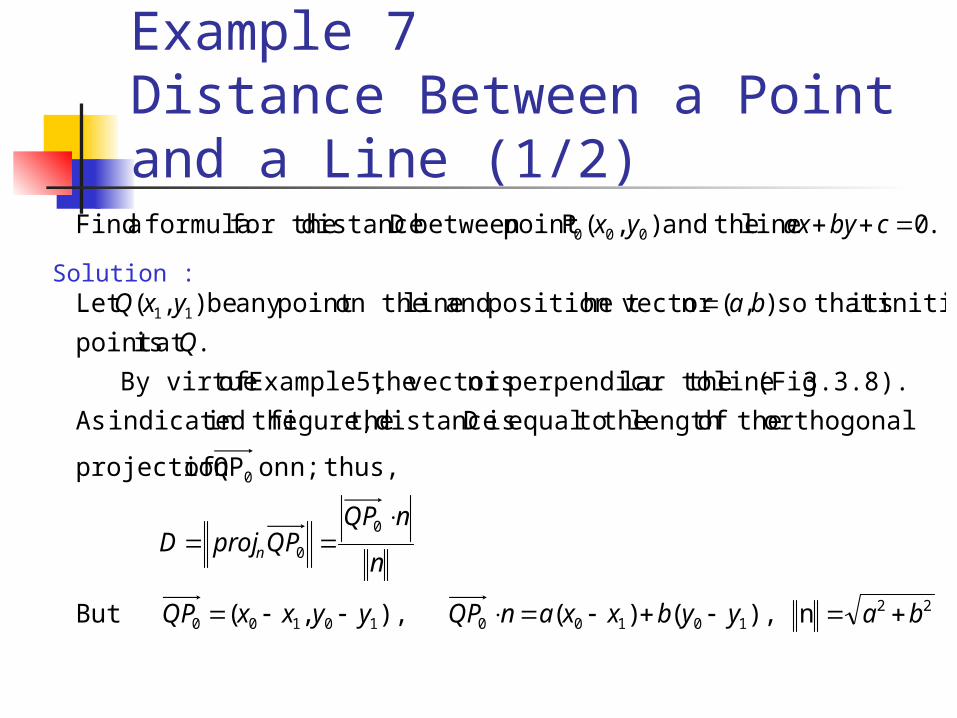
n ),()( ),,( But
thus,n;on QP of projection
orthogonal theoflength the toequal is D distance thefigure, in the indicated As
3.3.8). (Fig line thelar toperpendicu isn vector theExample5, of By virtue
.at ispoint
initial its that so ),(n vector heposition t and line on thepoint any be ),(Let
.0 line theand ),(Ppoint between D distance for the formula a Find
bayybxxanQPyyxxQP
n
nQPQPprojD
Q
bayxQ
cbyaxyx
n
Solution :
Example 7Distance Between a Point and a Line (2/2)
(13)
formula theyields (12)in expression thisngSubstituti
or 0
so line, theofequation the
satisfy scoordinate its line, on the lies )y,(point theSince
(12) )()(
that so
22
00
1111
11
22
1010
ba
cbyaxD
byaxccbyax
xQba
yybxxaD
Solution (count)

Example 8Using the Distance Formula
5
11
25
11
43
6)2(4)1)(3(
is 06-4y3x line theto
(1,-2)point thefrom D distance that the(13) Formula from followsIt
22
D

3.4 Cross Product

Cross Product of Vectors Recall from Section 3.3 that the dot
product of two vectors in 2-space or 3-space produces a scalar.
We will now define a type of vector multiplication that produces a vector as the product, but which is applicable only in 3-space.
Example 1Calculating a Cross Product

Example 2u×v Is Perpendicular to u and to v

Determinant Form of Cross Product (1/2) A cross product can be represented
symbolically in the form of 3 × 3 determinant:
For example :
kji
kji
vu 672
103
221
then(3,0,1), vand (1,2,-2)u if

Example 5Calculating a Scalar Triple Product (1/2)
Independence of Cross Product and Coordinates (2/2) Question: two fixed vectors u and v might have
different cross products in different coordinate systems. Recall :
Since these properties of u x v depend only on the lengths and relative positions of u and v and not on the particular right-hand coordinate system being used.
Thus, we say that the definition of u x v is coordinate free.
This result is of importance to physicists and engineers who often work with many coordinate systems in the same problem.
the direction
the length

3.5 Lines and Planes in 3-Space
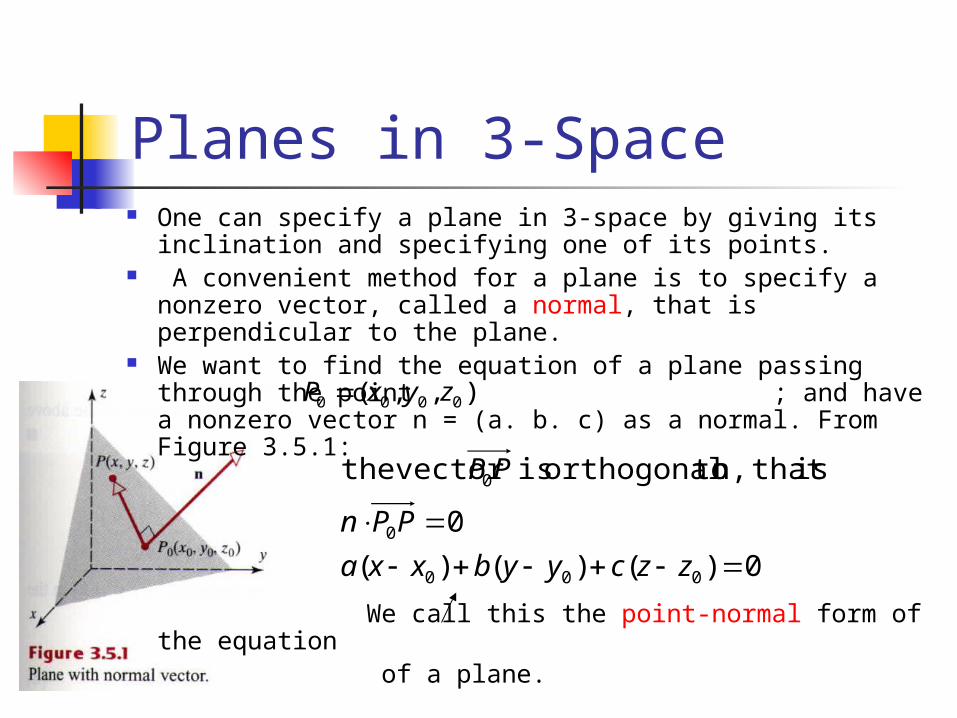
Planes in 3-Space One can specify a plane in 3-space by giving its
inclination and specifying one of its points. A convenient method for a plane is to specify a
nonzero vector, called a normal, that is perpendicular to the plane.
We want to find the equation of a plane passing through the point ; and have a nonzero vector n = (a. b. c) as a normal. From Figure 3.5.1:
We call this the point-normal form of the equation
of a plane.
),,( 0000 zyxP
0)()()(
0
is, that n, toorthogonal is vector the
000
0
0
zzcyybxxa
PPn
PP
Example 1Finding the Point-Normal Equation of a Plane
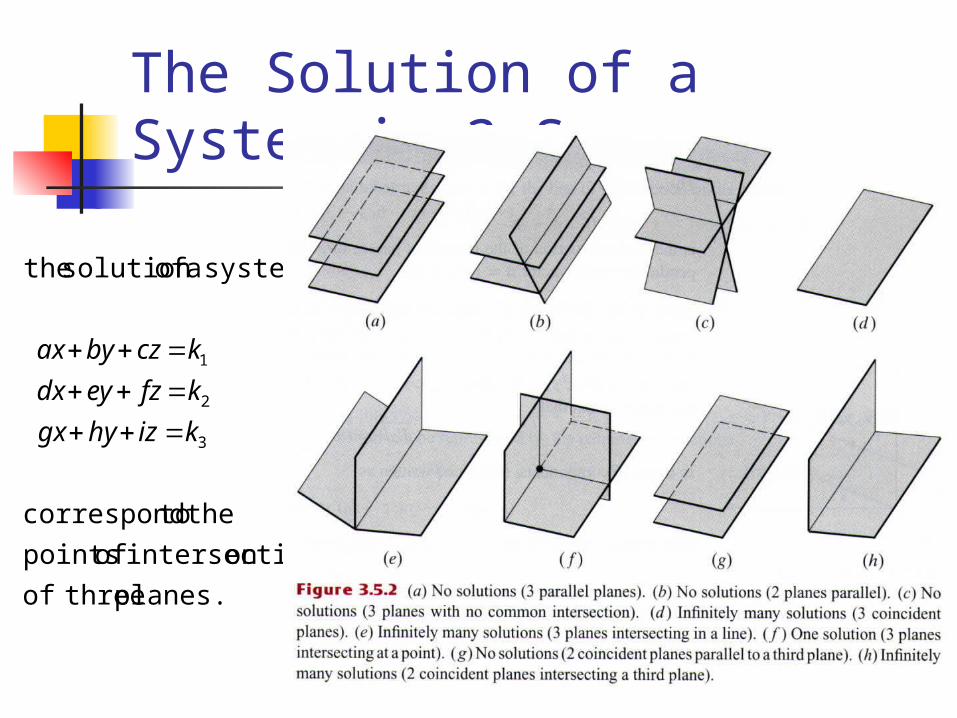
The Solution of a System in 3-Space
planes. threeof
on intersecti of points
the tocorrespond
system a ofsolution the
3
2
1
kizhygx
kfzeydx
kczbyax

Example 2Equation of a Plane Through Three Points (1/2)

Example 2Equation of a Plane Through Three Points (2/2)

0)(
so ,r-rThen plane. the tonormal vector a
be c)b,(a,nlet and )z,y,(xPpoint theto
origin thefrom vector thebe ),,(let
0
00
0000
0000
rrn
PP
zyxr
Vector Form of Equation of a Plane Referring to Figure 3.5.3, let r=( x, y, z) be the
vector from the origin to the point P (x , y, z),
This is called the vector form of the equation of a plane.
Example 3Vector Equation of a Plane Using(5)
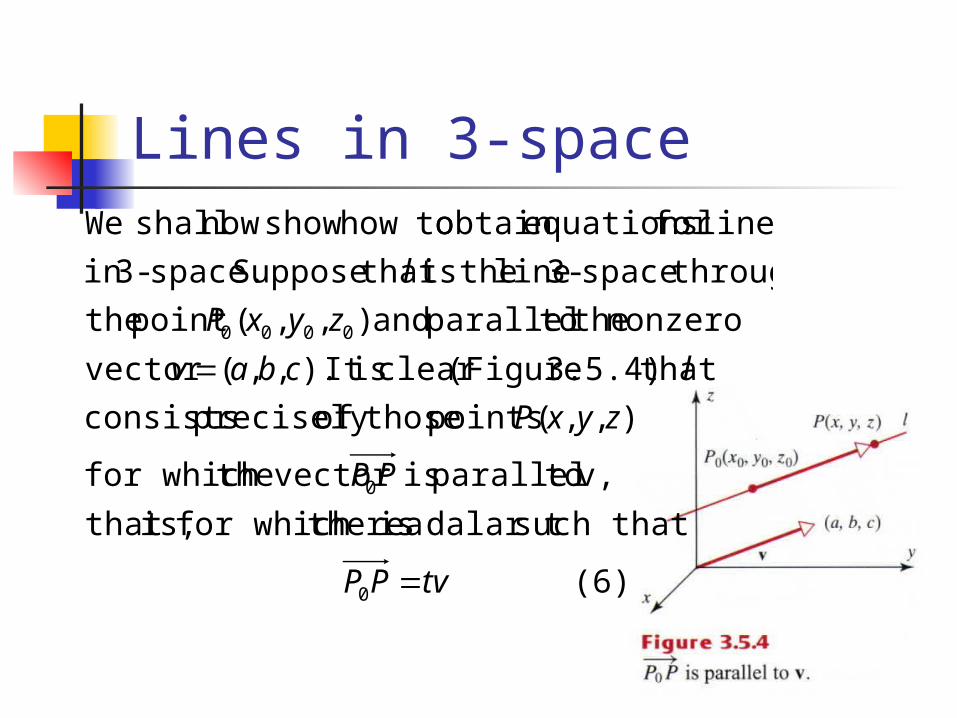
Lines in 3-space
(6)
such thatdalar t a is therefor which is,that
v, toparallel is vector thefor which
),,( points thoseofprecisely consists
that 3.5.4) (Figureclear isIt ).,,(vector
nonzero the toparallel and ),,(point the
through space-3 line theis that Suppose space.-3in
linesfor equationsobtain tohow show now shall We
0
0
0000
tvPP
PP
zyxP
lcbav
zyxP
l

Example 4Parametric Equations of a Line
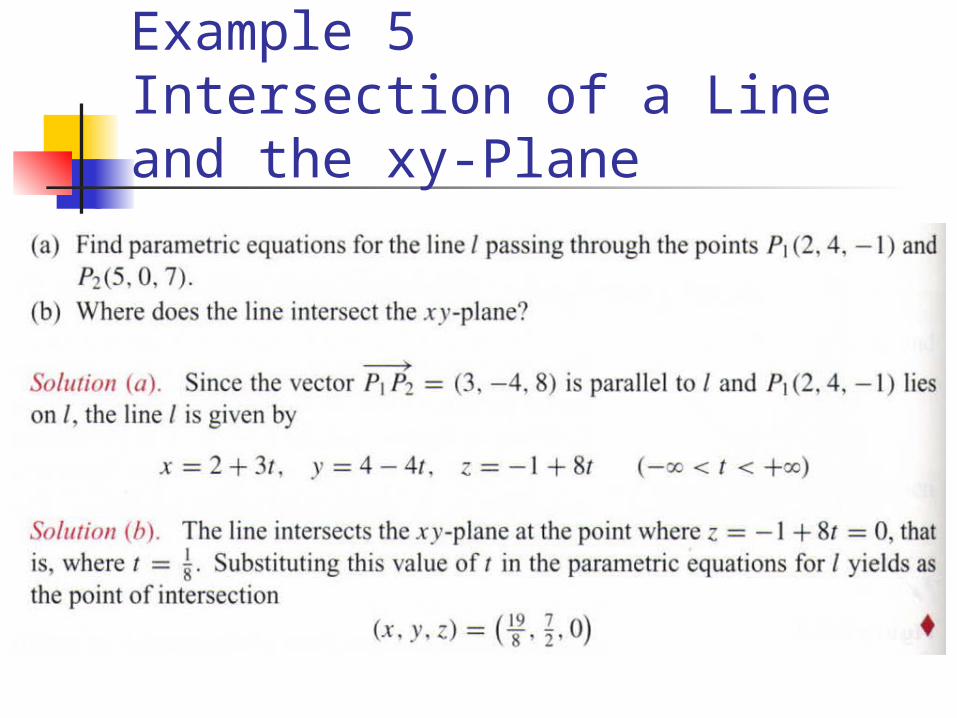
Example 5Intersection of a Line and the xy-Plane
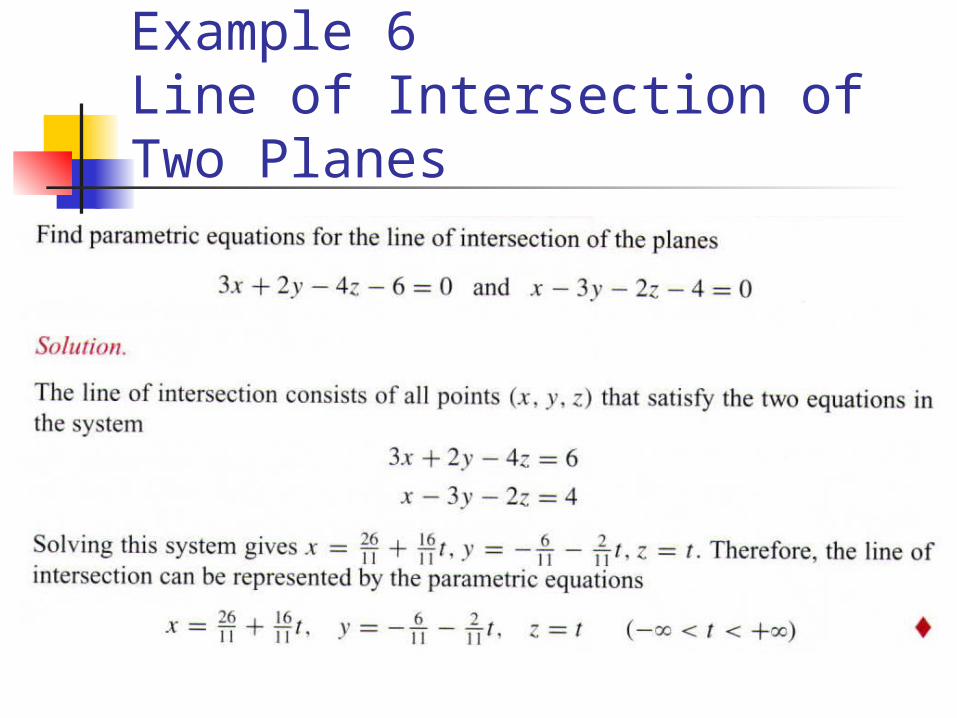
Example 6Line of Intersection of Two Planes
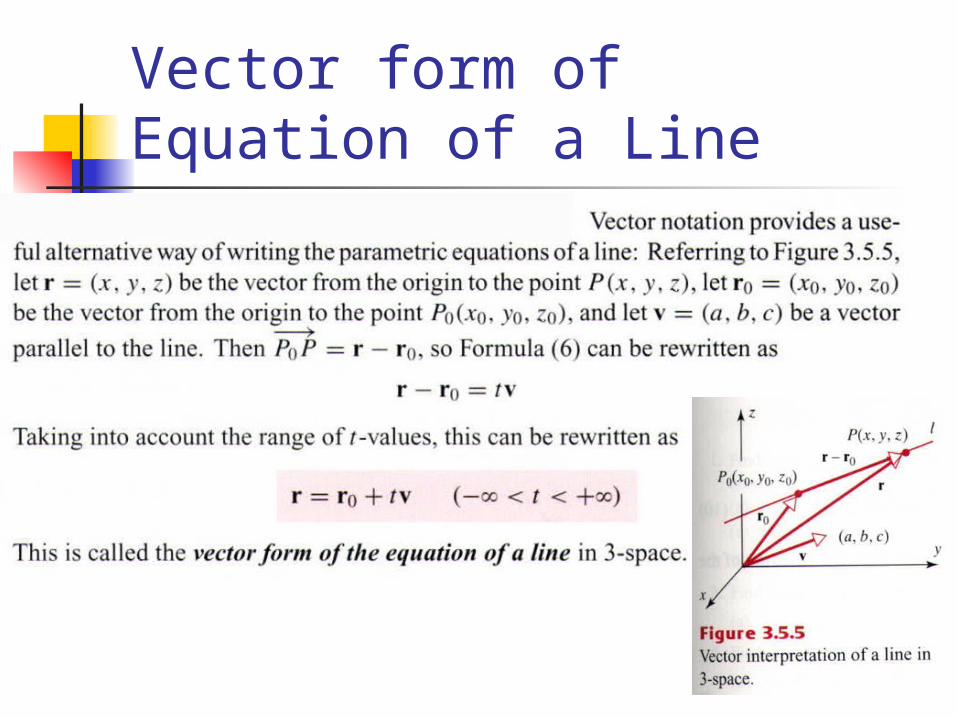
Vector form of Equation of a Line
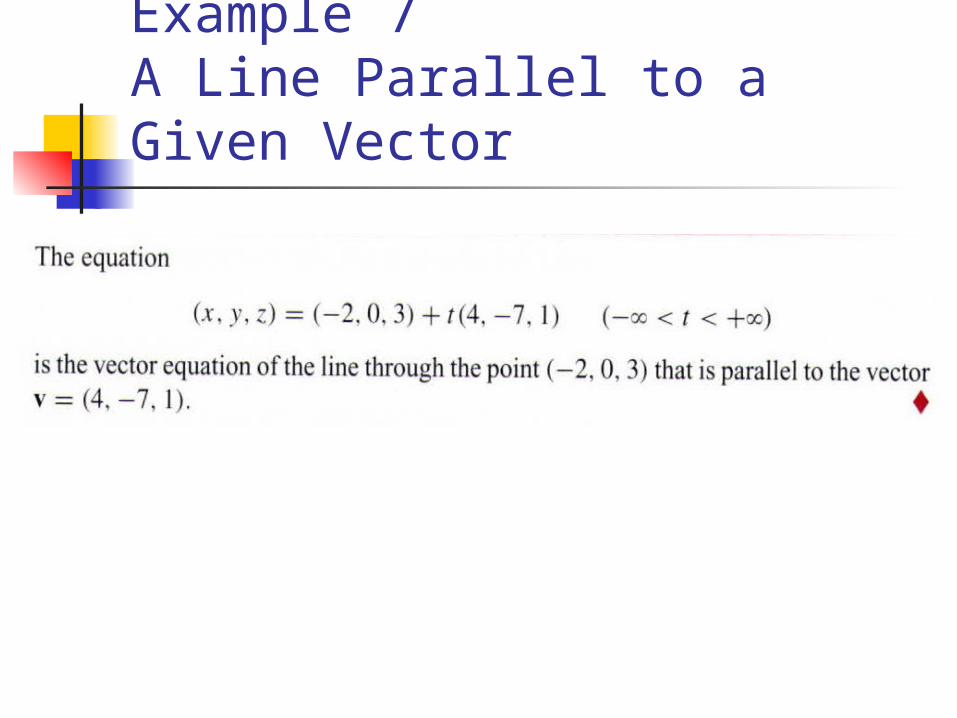
Example 7A Line Parallel to a Given Vector
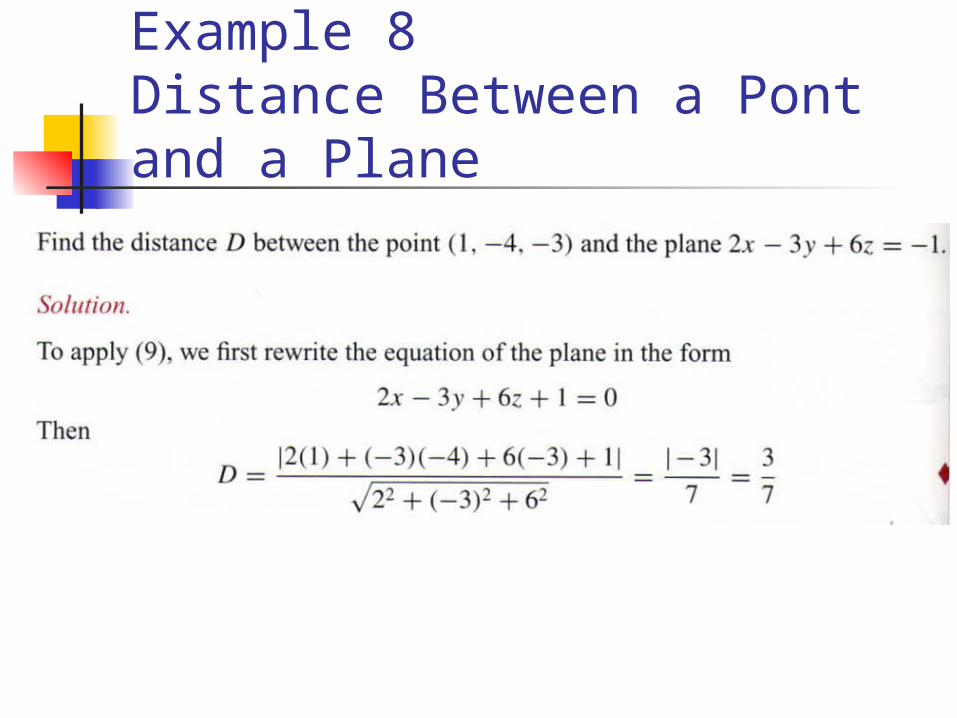
Example 8Distance Between a Pont and a Plane

Example 9Distance Between Parallel Planes