characterization of actuation properties of magnetorheological elastomers with embedded hard...
TRANSCRIPT
http://jim.sagepub.com/Structures
Journal of Intelligent Material Systems and
http://jim.sagepub.com/content/23/9/1049The online version of this article can be found at:
DOI: 10.1177/1045389X12439635
2012 23: 1049 originally published online 20 March 2012Journal of Intelligent Material Systems and StructuresJeong-Hoi Koo, Alexander Dawson and Hyung-Jo Jung
magnetic particlesCharacterization of actuation properties of magnetorheological elastomers with embedded hard
Published by:
http://www.sagepublications.com
can be found at:Journal of Intelligent Material Systems and StructuresAdditional services and information for
http://jim.sagepub.com/cgi/alertsEmail Alerts:
http://jim.sagepub.com/subscriptionsSubscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://jim.sagepub.com/content/23/9/1049.refs.htmlCitations:
What is This?
- Mar 20, 2012OnlineFirst Version of Record
- Jun 20, 2012Version of Record >>
at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from
Article
Journal of Intelligent Material Systemsand Structures23(9) 1049–1054� The Author(s) 2012Reprints and permissions:sagepub.co.uk/journalsPermissions.navDOI: 10.1177/1045389X12439635jim.sagepub.com
Characterization of actuationproperties of magnetorheologicalelastomers with embedded hardmagnetic particles
Jeong-Hoi Koo1, Alexander Dawson1 and Hyung-Jo Jung2
AbstractThis study investigates a new generation of magnetorheological elastomers based on hard magnetic particles. Unlike tra-ditional magnetorheological elastomers that use iron particles, a dispersion of hard magnetic materials aligned in an elec-tromagnetic field will produce a magnetorheological elastomer with magnetic poles. When a magnetic field is applied,perpendicularly to these poles, the filler particles generate torque and cause rotational motion of the magnetorheologi-cal elastomer blend. The primary goal of this study is to fabricate and characterize the actuation properties of magnetor-heological elastomers filled with various hard magnetic particles. To this end, samples of magnetorheological elastomersconsisting of hard magnetic materials were fabricated using four different particle types, and a test setup (electromagnet)was constructed. After mounting the magnetically anisotropic samples in a fixed-free configuration, uniform magneticfields are applied to the samples (perpendicular to the poled direction), which causes the sample to bend, similar to acantilevered beam. The blocked force and tip displacement of the samples were measured to characterize actuationproperties of the samples. The results show that the responses of the deflection and the blocked force at the tip showlinear trends over a reasonable range, suggesting that magnetorheological elastomers consisting of hard magnetic materi-als can be used as bending-type actuators in small mechanical systems and devices.
Keywordsmagnetorheological elastomer, hard magnetic, magnetorheological effect, bending actuator
Introduction
Magnetorheological (MR) materials are a branch ofsmart materials with properties and responses depen-dent upon the magnitude of an applied magnetic field.Since its discovery, the MR effect (Rabinow, 1948) hasbeen applied to several classes of materials, includingfluids, foams, and elastomers. Solid analogous to MRfluids, MR elastomers (MREs), have emerged in recentyears as new variable stiffness materials. The type anddispersion of the filler particles affect the response ofthe MREs to an applied magnetic field and subse-quently the modes of application. Conventional MREsconsist of a dispersion of soft magnetic particles, suchas iron, aligned in an electromagnetic field. The elasticmodulus of the resulting material is magnetic fielddependent. The main focus of the traditional MREresearch has been maximizing the MR effect (theamount of change in the mechanical properties ofMREs, such as stiffness, with and without the presenceof the magnetic field) by experimenting with various
particle concentrations, shapes, sizes, orientations, aswell as filler materials and bimodal particle mixtures(Chen et al., 2008; Hu et al., 2005; Lokander andStenberg, 2003a, 2003b; Von Lockette et al., 2008).Characterization and modeling work of MRE materialsfurther helped the enhancement of MRE materials(Gong et al., 2005; Zhou, 2003, 2004). Various engi-neering applications of MRE materials as variable stiff-ness elements have been investigated for vibrationcontrol of mechanical and structural systems (Dengand Gong, 2007; Kim et al., 2011; Koo et al., 2009).
1Department of Mechanical and Manufacturing Engineering, Miami
University, Oxford, OH, USA2Department of Civil and Environmental Engineering, KAIST, Daejeon,
Korea
Corresponding author:
Jeong-Hoi Koo, Department of Mechanical and Manufacturing
Engineering, Miami University, Oxford, OH 45056, USA.
Email: [email protected]
at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from

Unlike conventional MRE materials that use ironparticles, a dispersion of hard magnetic materialsaligned in an electromagnetic field produces an aniso-tropic, magnetically poled MRE, which is similar to aflexible permanent magnet. The nature of MREs con-sisting of hard magnetic materials (H-MRE), both thepermanency of embedded particles as well as the flexi-bility of surrounding elastomer, creates a material withapplications quite different from those of conventionalMREs. Upon application of a magnetic field, the hardmagnetic particles embedded in a semirigid median willcause rotational motion as the particles produce torquebased on the cross product of the particles’ internalmagnetization and the applied magnetic field strength.The resulting motion and force can be used as a mag-netic field–controlled actuator.
Limited research has been performed on the newgeneration of H-MREs, thus the primary goal of thisstudy is to fabricate and characterize H-MREs. In par-ticular, this study will focus on experimental evaluationof H-MREs with different filler materials in an effortto determine the feasibility of utilizing these materialsas bending-type actuators as well as the effect perma-nent magnetic characteristics have on the response ofthe actuator.
H-MRE sample preparation
Volume percentages for optimal MR effect have beenestablished for conventional MREs (Lokander andStenberg, 2003a); thus H-MRE samples were fabricatedwith particle volume percentages of 30% cured with atwo-component elastomer resin in a rectangular prismmold with dimensions of 63.5 mm (width) 3 31.8 mm(length) 3 2.5 mm (thickness). The silicone rubber actsas the binding agent, contributing to the stiffness andflexibility of the cured sample, and the embedded mag-netic particles produce the MR effect. Samples werefabricated from high-strength silicon elastomer resin(Dow Corning Corp.).
In order to study the effect of particle types, fourtypes of permanent magnetic particles were studied:barium hexaferrite (BaFe12O19), strontium ferrite(SrFe12O19), samarium cobalt (SmCo5), and neody-mium magnet (Nd2Fe14B). While complete magneticproperties of the particles used in this study are notavailable, typical magnetic properties of two classes ofhard magnetic materials provided in Table 1. Bariumand strontium ferrites can be categorized as ceramicferrites, and neodymium and samarium cobalt powdersfall into the rare-earth alloys category (Lagorce andAllen, 1997).
The particle sizes of the hard magnetic materialsconsidered in this study are different because only lim-ited particle sizes are available commercially for certainmaterials. Moreover, it appears that fine, uniform-
particle-size powders of rare-earth magnetic materialsare not available because they are prone to oxidationand corrosion, particularly in a small particle form.The size of barium ferrite and strontium particles usedin the current study is 2325 mesh or 44 mm, and thesize of samarium cobalt particles is 230 mesh or 595mm. While these three particles have uniform particlesizes, the size of the neodymium varied from 50 mm to250 mm.
Samples were produced to resin specifications withthe addition of the magnetic particles and aligned in a2-T magnetic field for 1 h (see Figure 1). The total cur-ing time was 24 h at room temperature. In order toobtain a clear test result, an MRE sample needs to havea uniform alignment of magnetic iron particles.Without a uniform alignment, the torque, from cross-ing magnetic field, is produced in various directionsinstead of the desired single direction. Figure 2 showsscanning electron microscope (SEM) images of una-ligned and aligned samples.
Experimental setup
In order to produce a varying magnetic field, a two-coilmodified horseshoe electromagnet with an iron core(see Figure 3) was used. The coils consisted of 750 turnsof 18-AWG wire. Current was supplied to the coil via a
Figure 1. Curing H-MRE samples using a ferromagneticresonance spectrometer setup.H-MRE: magnetorheological elastomers consisting of hard magnetic
materials.
Table 1. Comparison of magnetic materials.
Material class Rare earthalloys
Ceramicferrites
Residual induction, Br ~0.9 T ~0.36 TIntrinsic coercivity, Hci ~1200 kA/m .320 kA/mMaximum energy product,(BH)max
~155,000 T�A/m ~25,000 T�A/m
Source: Lagorce and Allen (1997).
1050 Journal of Intelligent Material Systems and Structures 23(9)
at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from
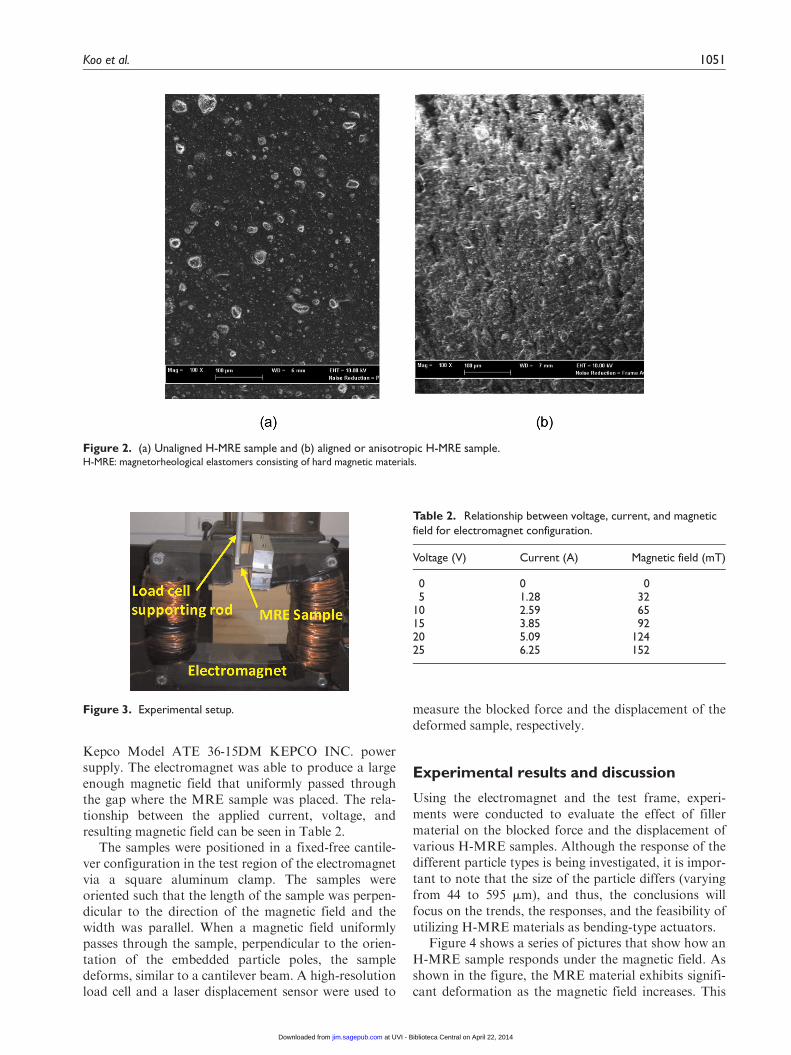
Kepco Model ATE 36-15DM KEPCO INC. powersupply. The electromagnet was able to produce a largeenough magnetic field that uniformly passed throughthe gap where the MRE sample was placed. The rela-tionship between the applied current, voltage, andresulting magnetic field can be seen in Table 2.
The samples were positioned in a fixed-free cantile-ver configuration in the test region of the electromagnetvia a square aluminum clamp. The samples wereoriented such that the length of the sample was perpen-dicular to the direction of the magnetic field and thewidth was parallel. When a magnetic field uniformlypasses through the sample, perpendicular to the orien-tation of the embedded particle poles, the sampledeforms, similar to a cantilever beam. A high-resolutionload cell and a laser displacement sensor were used to
measure the blocked force and the displacement of thedeformed sample, respectively.
Experimental results and discussion
Using the electromagnet and the test frame, experi-ments were conducted to evaluate the effect of fillermaterial on the blocked force and the displacement ofvarious H-MRE samples. Although the response of thedifferent particle types is being investigated, it is impor-tant to note that the size of the particle differs (varyingfrom 44 to 595 mm), and thus, the conclusions willfocus on the trends, the responses, and the feasibility ofutilizing H-MRE materials as bending-type actuators.
Figure 4 shows a series of pictures that show how anH-MRE sample responds under the magnetic field. Asshown in the figure, the MRE material exhibits signifi-cant deformation as the magnetic field increases. This
Figure 2. (a) Unaligned H-MRE sample and (b) aligned or anisotropic H-MRE sample.H-MRE: magnetorheological elastomers consisting of hard magnetic materials.
Figure 3. Experimental setup.
Table 2. Relationship between voltage, current, and magneticfield for electromagnet configuration.
Voltage (V) Current (A) Magnetic field (mT)
0 0 05 1.28 32
10 2.59 6515 3.85 9220 5.09 12425 6.25 152
Koo et al. 1051
at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from
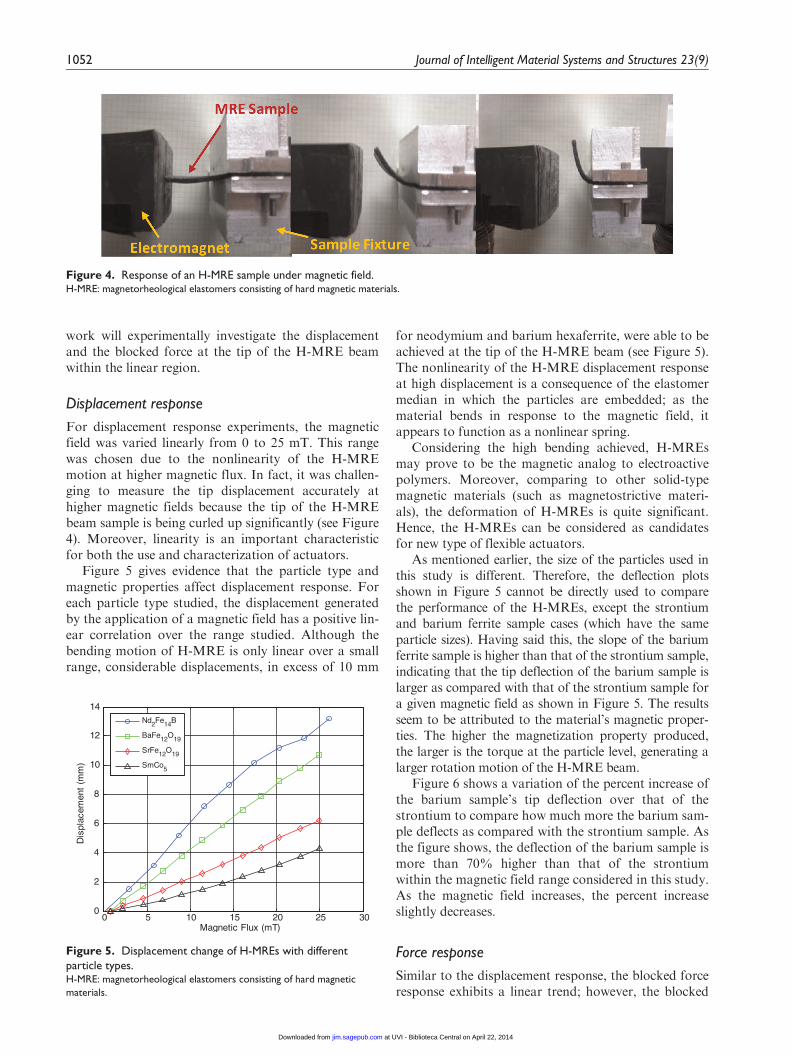
work will experimentally investigate the displacementand the blocked force at the tip of the H-MRE beamwithin the linear region.
Displacement response
For displacement response experiments, the magneticfield was varied linearly from 0 to 25 mT. This rangewas chosen due to the nonlinearity of the H-MREmotion at higher magnetic flux. In fact, it was challen-ging to measure the tip displacement accurately athigher magnetic fields because the tip of the H-MREbeam sample is being curled up significantly (see Figure4). Moreover, linearity is an important characteristicfor both the use and characterization of actuators.
Figure 5 gives evidence that the particle type andmagnetic properties affect displacement response. Foreach particle type studied, the displacement generatedby the application of a magnetic field has a positive lin-ear correlation over the range studied. Although thebending motion of H-MRE is only linear over a smallrange, considerable displacements, in excess of 10 mm
for neodymium and barium hexaferrite, were able to beachieved at the tip of the H-MRE beam (see Figure 5).The nonlinearity of the H-MRE displacement responseat high displacement is a consequence of the elastomermedian in which the particles are embedded; as thematerial bends in response to the magnetic field, itappears to function as a nonlinear spring.
Considering the high bending achieved, H-MREsmay prove to be the magnetic analog to electroactivepolymers. Moreover, comparing to other solid-typemagnetic materials (such as magnetostrictive materi-als), the deformation of H-MREs is quite significant.Hence, the H-MREs can be considered as candidatesfor new type of flexible actuators.
As mentioned earlier, the size of the particles used inthis study is different. Therefore, the deflection plotsshown in Figure 5 cannot be directly used to comparethe performance of the H-MREs, except the strontiumand barium ferrite sample cases (which have the sameparticle sizes). Having said this, the slope of the bariumferrite sample is higher than that of the strontium sample,indicating that the tip deflection of the barium sample islarger as compared with that of the strontium sample fora given magnetic field as shown in Figure 5. The resultsseem to be attributed to the material’s magnetic proper-ties. The higher the magnetization property produced,the larger is the torque at the particle level, generating alarger rotation motion of the H-MRE beam.
Figure 6 shows a variation of the percent increase ofthe barium sample’s tip deflection over that of thestrontium to compare how much more the barium sam-ple deflects as compared with the strontium sample. Asthe figure shows, the deflection of the barium sample ismore than 70% higher than that of the strontiumwithin the magnetic field range considered in this study.As the magnetic field increases, the percent increaseslightly decreases.
Force response
Similar to the displacement response, the blocked forceresponse exhibits a linear trend; however, the blocked
Figure 4. Response of an H-MRE sample under magnetic field.H-MRE: magnetorheological elastomers consisting of hard magnetic materials.
0 5 10 15 20 25 300
2
4
6
8
10
12
14
Magnetic Flux (mT)
Dis
plac
emen
t (m
m)
Nd2Fe14B
BaFe12O19
SrFe12O19
SmCo5
Figure 5. Displacement change of H-MREs with differentparticle types.H-MRE: magnetorheological elastomers consisting of hard magnetic
materials.
1052 Journal of Intelligent Material Systems and Structures 23(9)
at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from
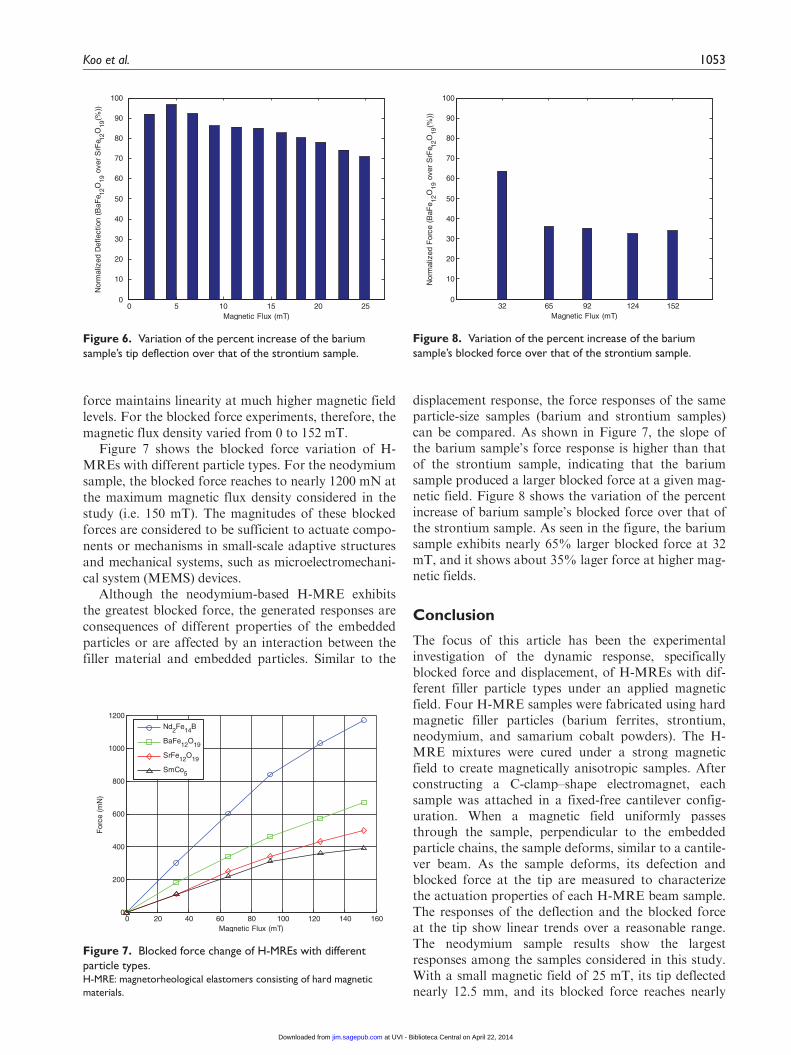
force maintains linearity at much higher magnetic fieldlevels. For the blocked force experiments, therefore, themagnetic flux density varied from 0 to 152 mT.
Figure 7 shows the blocked force variation of H-MREs with different particle types. For the neodymiumsample, the blocked force reaches to nearly 1200 mN atthe maximum magnetic flux density considered in thestudy (i.e. 150 mT). The magnitudes of these blockedforces are considered to be sufficient to actuate compo-nents or mechanisms in small-scale adaptive structuresand mechanical systems, such as microelectromechani-cal system (MEMS) devices.
Although the neodymium-based H-MRE exhibitsthe greatest blocked force, the generated responses areconsequences of different properties of the embeddedparticles or are affected by an interaction between thefiller material and embedded particles. Similar to the
displacement response, the force responses of the sameparticle-size samples (barium and strontium samples)can be compared. As shown in Figure 7, the slope ofthe barium sample’s force response is higher than thatof the strontium sample, indicating that the bariumsample produced a larger blocked force at a given mag-netic field. Figure 8 shows the variation of the percentincrease of barium sample’s blocked force over that ofthe strontium sample. As seen in the figure, the bariumsample exhibits nearly 65% larger blocked force at 32mT, and it shows about 35% lager force at higher mag-netic fields.
Conclusion
The focus of this article has been the experimentalinvestigation of the dynamic response, specificallyblocked force and displacement, of H-MREs with dif-ferent filler particle types under an applied magneticfield. Four H-MRE samples were fabricated using hardmagnetic filler particles (barium ferrites, strontium,neodymium, and samarium cobalt powders). The H-MRE mixtures were cured under a strong magneticfield to create magnetically anisotropic samples. Afterconstructing a C-clamp–shape electromagnet, eachsample was attached in a fixed-free cantilever config-uration. When a magnetic field uniformly passesthrough the sample, perpendicular to the embeddedparticle chains, the sample deforms, similar to a cantile-ver beam. As the sample deforms, its defection andblocked force at the tip are measured to characterizethe actuation properties of each H-MRE beam sample.The responses of the deflection and the blocked forceat the tip show linear trends over a reasonable range.The neodymium sample results show the largestresponses among the samples considered in this study.With a small magnetic field of 25 mT, its tip deflectednearly 12.5 mm, and its blocked force reaches nearly
0 20 40 60 80 100 120 140 1600
200
400
600
800
1000
1200
Magnetic Flux (mT)
For
ce (
mN
)
Nd2Fe14B
BaFe12O19
SrFe12O19
SmCo5
Figure 7. Blocked force change of H-MREs with differentparticle types.H-MRE: magnetorheological elastomers consisting of hard magnetic
materials.
0 5 10 15 20 250
10
20
30
40
50
60
70
80
90
100
Magnetic Flux (mT)
Nor
mal
ized
Def
lect
ion
(BaF
e 12O
19 o
ver
SrF
e 12O
19(%
))
Figure 6. Variation of the percent increase of the bariumsample’s tip deflection over that of the strontium sample.
32 65 92 124 1520
10
20
30
40
50
60
70
80
90
100
Magnetic Flux (mT)
Nor
mal
ized
For
ce (
BaF
e 12O
19 o
ver
SrF
e 12O
19(%
))
Figure 8. Variation of the percent increase of the bariumsample’s blocked force over that of the strontium sample.
Koo et al. 1053
at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from

1200 mN at 150 mT. With respect to barium and stron-tium samples of same particle size, the barium sampleshows larger tip defections and blocked forces as com-pared to those of the strontium sample. Overall, theresults suggest that the dynamic behaviors of the H-MREs provide promising implications for their roles asmagnetically controlled actuators. Future work willinvestigate the effect of filler percentage, base resinstiffness, and dimensionality on the dynamic responsebefore effective actuators can be designed from H-MRE materials.
Acknowledgements
The support of Dr Edelmann at the Electron MicroscopyCenter at Miami University is gratefully acknowledged. Theauthors would also like to acknowledge the assistances of DrPechan and Dr. Dou in the Physics Department at MiamiUniversity.
Funding
This work was partially supported by the UndergraduateResearch Award program at Miami University of Ohio.
References
Chen L, Gong XL and Li WH (2008) Effect of carbon blackon the mechanical performances of magnetorheologicalelastomers. Polymer Testing 27: 340–345.
Deng H and Gong X (2007) Adaptive tuned vibrationabsorber based on magnetorheological elastomer. Journalof Intelligent Material Systems and Structures 18:1205–1210.
Gong XL, Zhang XZ and Zhang PQ (2005) Fabrication and
characterization of isotropic magnetorheological elasto-
mers. Polymer Testing 24: 669–676.Hu YL, Wang YL, Gong XL, et al. (2005) New magnetor-
heological elastomers based on polyurethane/Si-rubber
hybrid. Polymer Testing 24: 324–329.Kim YK, Koo JH, Kim KS, et al. (2011) Suppressing harmo-
nic vibrations of a miniature cryogenic cooler using an
adaptive tunable vibration absorber based on magneto-
rheological elastomers. Review of Scientific Instruments
82(3): 035103.Koo JH, Jang DD, Usman M, et al. (2009) A feasibility study
on smart base isolation systems using magneto-rheological
elastomers. Structural Engineering Mechanics 32(6): 755–770.Lagorce LK and Allen MG (1997) Magnetic and mechanical
properties of micromachined strontium ferrite/polyimide
composites. Journal of Microelectromechanical Systems
6(4): 307–312.Lokander M and Stenberg B (2003a) Performance of isotropic
magnetorheological rubber materials. Polymer Testing 22:
245–251.Lokander M and Stenberg B (2003b) Improving the magne-
torheological effect in isotropic magnetorheological rubber
materials. Polymer Testing 22: 677–680.
Rabinow J (1948) The magnetic fluid clutch. Transactions of
the American Institute of Electrical Engineers 67: 1308–1315.Von Lockette PR, Loftland SE, Koo JH, et al. (2008)
Dynamic characterization of bimodal particle mixtures in
silicone rubber magnetorheological materials. Polymer
Testing 27: 931–935.Zhou GY (2003) Shear properties of magnetorheological elas-
tomers. Smart Materials and Structures 12: 139–146.Zhou GY (2004) Complex shear modulus of a magnetorheologi-
cal elastomer. Smart Materials and Structures 13: 1203–1210.
1054 Journal of Intelligent Material Systems and Structures 23(9)
at UVI - Biblioteca Central on April 22, 2014jim.sagepub.comDownloaded from