characterizing noise arising from imperfections in the
TRANSCRIPT

Characterizing noise arising from imperfections in
the Torsion Pendulum
Gobind Singh
Ando Lab, Physics Department, University of Tokyo
Physics Department, Indian Institute of Delhi∗
E-mail: [email protected]
Abstract
With TOBA being proposed as a reliable detector to see Gravitational Waves at
the frequency range 0.1 Hz - 10 Hz, the need to characterize noise arising from cross-
coupling arises. This paper attempts to model the torsion pendulum and make some
predictions and offer some insight into this direction.
Introduction
Gravitational Wave Astronomy has come to the forefront in the past few years, with LIGO
discovering a black-hole merger in 2015. Indirect observations were first made by seeing how
the orbits of binary systems change over time, and confirming with the GW theory. Direct
observation of GWs have been attempted using ground based detectors. These include
resonant mass detectors and laser-interferometric detectors. Space based interferometers
such as LISA and DECIGO are currently in development. Both of them aim to cover the
low frequency range - LISA aiming for the 1 mHz range and DECIGO for 0.1 Hz - 10 Hz
1

range. Torsion Bar Antenna (TOBA) was proposed in 2010 as detector for low frequency
observations, and can be used in both ground based and space borne configurations.
Torsion Bar Antenna
Torsion Pendulums have been used since the 17th century in the field of precision measure-
ments, famously used by Cavendish for the measurement of the gravitational constant G
and by Coulomb for measuring the electrostatic force. Torsion pendulum instrumentation is
useful for eliminating any background effects, thereby useful in isolating weak effects such
as gravitational forces.
There have been numerous variations of torsion pendulum in literature and practice, all
sharing the same basic design - a test mass suspended by a fiber. In this paper, we model
the torsion pendulum with certain features and assumptions biased towards TOBA. We do
keep the central design of a suspended test mass intact.
Figure 1: Torsion Bar Antenna
2

Principle
A Torsion Bar Antenna comprises of two bar shaped test masses, perpendicular to back-
ground gravitational force( Earth) and orthogonal to each other. GWs on passing through
the antenna excite the torsion mode due to differential angular fluctuations. These fluctua-
tions are picked up by a sensitive sensor such as a laser interferometer or an optical lever.
The rotational angle is governed by the following equation
Iθ + γθ + kθ = τGW
τGW is the torque exerted by the GW
γ is the damping factor
k is the torsional constant
I is the moment of inertia of the test mass about an axis passing through the fiber and the
suspension point
The torque exerted by a gravitational wave can be written as
τGW =1
4qij.hij(t)
qij is the dynamic quadrupole moment of the test mass
hij is GW amplitude
Assuming that the test mass is free to move with negligible damping and the GW is
travelling along the fiber axis we get the following solution for the rotation angle
θdiff = αhX(t)
α is the shape factor of the test mass depending on the moment of inertia, mass and the
3
configuration
hX(t) is the amplitude of the cross-polarization GW
In the situation when the antenna is rotating, the plus polarization GW also manifests
in the differential angular measurement, with its functional form being
θdiff = αωg
ωrot
2
[hXcos(2ωrott) + h+sin(2ωrott]
ωrot is the rotation angular velocity
h+ is the amplitude of the plus-polarization GW
The above equation brings forth one advantage of TOBA - low frequency GWs can be
modulated up to increase the observation band. The low frequency GW is converted to
signals at the frequency around 2ωrot.
Noise
Noise is a deterrent for any mechanical system and TOBA is no exception. Noise shows up in
various forms but we aim to quantify the thermal noise. Thermal noise could be interpreted
in a different way - gas damping. Gas damping refers to loss of energy caused by moving in
a dissipative medium i.e gas molecules. That is the reason that most experiments are done
in vacuum (or vacuum like conditions). The gas damping factor is more than 2 orders of
magnitude than the internal damping factor i.e material damping.
Material damping is the thermal noise we aim to quantify. Every material has some internal
damping mechanism and, thereby noise associated with it. We model our torsion pendulum
as a damped harmonic oscillator and aim to quantify the noise i.e the equilibrium fluctua-
tions.
4

Consider a linear restoring force with viscous damping
F = mx+ bx+ kx
F is force m is mass b is damping coefficient k is restoring coefficient
This type of damping has been studied extensively. Another model of damping is known
as structural damping. Consider a linear restoring force with structural damping -
F = mx+ k(1 + iφ) ∗ x
where φ is the loss angle
We can quantify the noise arising from these dissipative mechanisms using the fluctuation
- dissipation theorem.
The fluctuation-dissipation theorem gives us an understanding of how thermal noise
affects a system. It essentially states that in the same way that a system loses useful energy
via dissipative mechanisms which turns into thermal energy, thermal noise is generated by
the same route, in which thermal energy turns into noise via the opposite direction.
Using the theorem, we relate the thermal noise to its damping parameters. We get a very
useful result for the noise in the torsion angle θ :
< θ2 >=kbTµπD
4
8ω5I2LQ
where D,L,I are the diameter of the fiber, length of the fiber and moment of inertia of the
system respectively.
ω is the frequency and Q is the quality factor of the system.
The important thing is that the noise is inversely proportional to the quality factor. This
is the prime motivation for maximizing the Q for any torsion system. For TOBA, thermal
5

noise shouldnt be a factor and Q should be around 108. Numerous material and system
configurations have been tried in this quest for high Q and a lot of measurements have been
made.
Experimental Details
The torsional Q factor for fibres were measured via the ringdown method, which is explained
in detail below. Simply put, a system is allowed to resonate and then left alone, with the
resonance frequency and decay in amplitude measured.
Ringdown
Figure 2: Ringdown of a damped system
For any decaying system , quality factor can be defined as a measure of the damping of
the system. Formally
Q = 2πE
∆E
6

For a torsion pendulum governed by the equation 1, we can formulate Q in a measurable
way
Q = πf0τ
Here f0 is the resonance frequency of the torsion mode, and τ the time constant for ringdown.
This equation holds true for high Q systems and our setup falls in that category. So essentially
for quantifying noise, we can calculate the resonance frequency and time constant of the
torsion angle. This is the ringdown method.
Experimental Details
Our setup,designed by Ooi Ching Pin is a generic torsion pendulum, with a mirror at-
7

Figure 3: Decay of the torsion pendulum
Figure 4: Zoomed in at the initial seconds (Dominated at the resonance frequency i.e 3.49hz
tached to it so as to monitor its movement. A disk was used instead of a bar so as to reduce
the asymmetry of the system. Care was taken in handling the fibers. Ooi Ching Pin obtained
various values of Q in the range of 105 to 106 depending on factors such as fiber material,
length, diameter, mass and geometry of the system. Other factors include clamp strength,
polishing of the fibres and the mass of the test mass itself. One thing is clear - the quest
for Q in the range of 108 is still on. We will now make some qualitative arguments about
reaching a better Q and model asymmetries in the pendulum, characterizing this complex
system. More details about this system can found in the Ooi Ching Pin’s thesis.
8

(a) Linear fitting to the log plot (b) Observe how the linear fit is inaccurate afterthe some time (noise dominated)
Figure 5: Linear Fitting
Loss Mechanisms
It is suspected that the Qmeasured is not the actual value and is affected by other sources.
Consider a Qeffective with other loss mechanisms
Qeff = 2πE1 + E2 + E3...
∆E1 + ∆E2 + ∆E3....
Here E1, E2, E3.. belong to different loss mechanisms. The possible loss mechanisms which
limit Q measurements are listed below :
• Surface Loss: There is a growing body of evidence that high Q measurements of fibres
are almost always limited by surface loss. Surface losses are caused by the surface being
damaged compared, with the bulk, with absorbed molecules, irregularities leading to
a lower Q then the bulk. With respect to torsion pendulums , the surface loss can be
expressed in term of setup parameters and found to be inversely proportional to the
diameter of the fiber.
• Clamp Losses: The fiber is clamped at two end and the dissipation of energy at the
clamp due to opposing motion is one of the biggest deterrents in obtaining high Q
values. It also depends on the polishing of the fibres, with more polished fibers having
more clamp losses.
• Seismic Losses: With the system in contact with the floor, seismic noise enters the
system. With seismic activity being prevalent in Japan, this effect cant be neglected.
9

The seismic energy flows into the clamp, coupling with the torsion mode (more on that
later). Even though further operation may be using vibration isolation techniques,
which would limit such noise, seismic noise still requires a careful look into.
Figure 6: Clamp Losses)
Asymmetry
Symmetry is beautiful and comforting. We have been modeling systems with perfect sym-
metry be it wheels, pendulum, etc. But a small offset of the center of the mass from the
suspension point turns this innocent looking torsional system into a complex mesh of cou-
pled pendulum-torsion-rotation system. This small offset is highly probable, and with TOBA
striving for higher sensitivities, cant be neglected. Our torsion pendulum system Q is also
limited by this cross coupling, and that is why we attempt to model that. Another motiva-
tion is that the signal obtained from the optical lever itself is influenced when other modes
are activated.
Setting up the Lagrangian
We allow 4 free coordinates based on physical considerations about fibers and torsion pen-
dulums.
• Pendulum Angle (θ)
• String Bending Angle (α)
10

• Azimuthal Angle (φ)
• Torsion Angle (ψ)
The other parameters are:
• Offset Distance of the COM
• Height of the COM
• Fiber Material
Figure 7: Various Degrees of Freedom
For constructing the Lagrangian, we need the energy terms only and that helps us ne-
glect the force at the clamp end for now. We formulate all energies - pendulum swinging,
gravitational potential, bending of the string and damping factors using theoretical models
to the above parameters and free coordinates.
Extracting the equations
Our Lagrangian contains about 40 cross coupled terms and that is supposed be our first
warning. We get 4 second order cross coupled differential equations with about 50 terms in
11

each of them. Solving them analytically was straightaway out of the picture, and we had
to solve them numerically. Numerical solving also was difficult and slow, so we used certain
approximations.
Solutions
The solutions to various degrees of freedom are depicted below. They depend a lot on the
initial conditions chosen. This is intuitive as the total energy depends a lot on the non-
torsion modes, and with varying the initial energy we can vary the amount of cross coupling
as well.
Figure 8: Pendulum Movement
Figure 9: String Bending
12

We estimate the offset distance to be of the order of 1 mm or less in any torsion pendulum
system. Fixing that we try to investigate the affected Q using this model, varying the fiber
properties. The results are summarized below -
Figure 10: Results for different materials
This was done for a system with Q of around 100000. The effect of coupling on Q and
thereby noise is evident. Energy transferring from the torsion mode, to other modes increases
the effective losses, decreasing the value of Q.
This table indicates that ruby is the best material, but there are a lot of caveats to numerical
modelling of this type which are explained in the appendix.
Signal Form
The signal obtained by the optical lever depends on all the four degrees of freedom. This
would be a problem in TOBA, as the GW information is only the torsion mode and the
contribution from other modes makes it difficult to extract that information. We can tune
our system parameters so as to shift the disruptive signal frequency spectrum , away from
the GW frequencies. The dominant frequencies in the disruptive signal are the sums and
differences of the resonance frequencies of the 4 modes, and this is expected out when two
13

signals are convolved. The resonance frequencies of the 4 modes are in our hands - depending
on certain system properties such as moment of inertia of the disk, length of the fiber, stiffness
of the fiber and offset.
(a) Actual Signal (b) Disturbed Signal
Figure 11: Actual GW signal and disturbed signal
Future Work
Model optimization
As explained earlier, the disruptive signal frequencies and the cross coupling depend on
the system parameters. Future work, could involve optimizing some quantity formulated in
terms of disruptive signal properties, cross coupling and other loss mechanisms for giving us
the best set of parameters for our torsion system. We would also need to incorporate the
GW bandwidth we are aiming for. This will be a complex optimization problem , and will
be worth looking into. Another thing to do is to refine the model and arrive at solutions
with a better accuracy and with less approximations.
Clamp Losses Study
A statistical study on clamp losses can be done, relating the measured Q to the clamp
tightening. This might help us in exploring other things such as the breaking clamp strength
or the functional dependence of the clamp losses on parameters, if there might be any. This
could help us use that dependence in our model as well.
14

Study of the vertical mode
With our system undergoing coupling, and being free to move in other degrees of freedom
as well, the optical lever gives us a vertical displacement as well. That mode would also
contain information about the GW due to coupling, and it can be speculated that using a
combination of both the disturbed horizontal and vertical modes, one could get the original
GW signal back with minimal losses.
Appendix
Numerical Modelling Caveats
With a lot of parameters (damping, initial conditions, geometry) in our model undetermined,
there is a lot of variation in the solutions obtained. This introduces a problem in generalizing
results obtained for one system to other systems. Another problem is the non analytic
solutions for the equations, which comprises many approximations and requires parameters
to be fed into the model at the start.
15
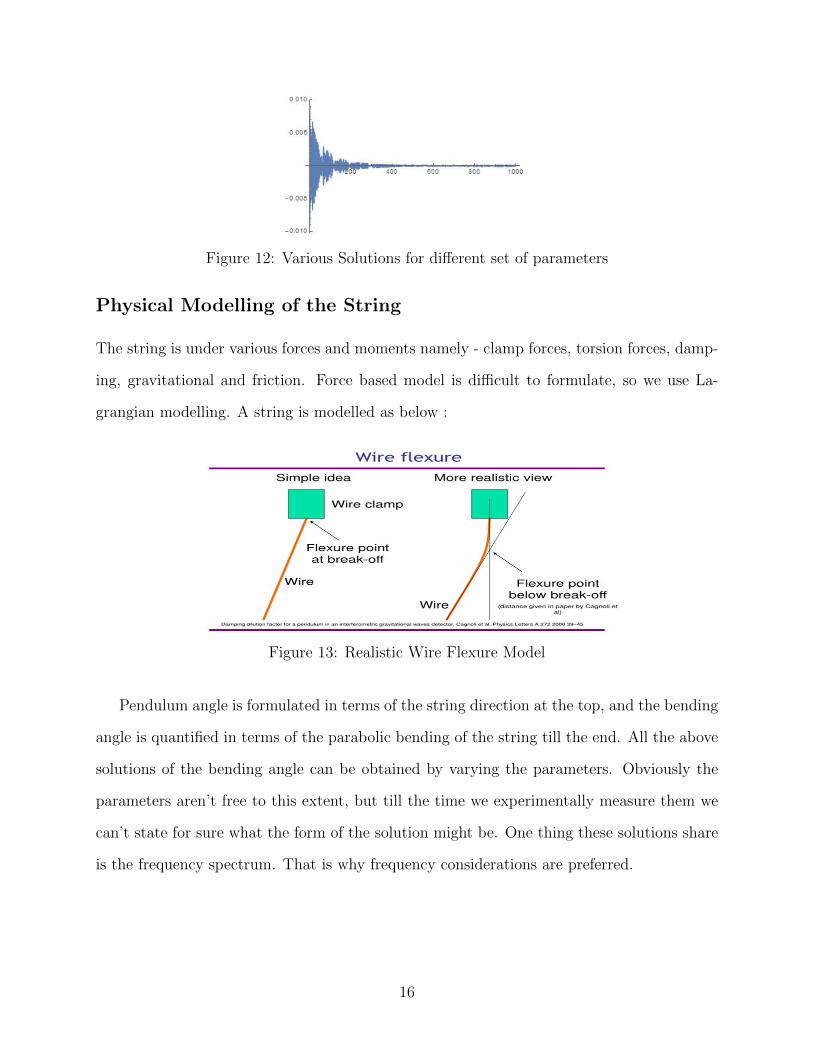
Figure 12: Various Solutions for different set of parameters
Physical Modelling of the String
The string is under various forces and moments namely - clamp forces, torsion forces, damp-
ing, gravitational and friction. Force based model is difficult to formulate, so we use La-
grangian modelling. A string is modelled as below :
Figure 13: Realistic Wire Flexure Model
Pendulum angle is formulated in terms of the string direction at the top, and the bending
angle is quantified in terms of the parabolic bending of the string till the end. All the above
solutions of the bending angle can be obtained by varying the parameters. Obviously the
parameters aren’t free to this extent, but till the time we experimentally measure them we
can’t state for sure what the form of the solution might be. One thing these solutions share
is the frequency spectrum. That is why frequency considerations are preferred.
16

Acknowledgment
I would like to thank my supervisor, Associate Professor Ando Masaki, and the fellow stu-
dents in the research laboratory for taking their time in helping me with this project. I would
like to specially thank Mr Ooi Ching Pin, for putting up with my requests and questions
(in the midst of his master thesis submission) throughout the course of this project, and for
helping me get a sense of the world class Tokyo food scene.
I also thank the UTRIP office and University of Tokyo for providing accommodation, funding
and support for this project.
References
• Ooi Ching Pin, Master Thesis, Mechanical Loss of Crystal Fibres for Torsion Pendulum
Experiments, (2018)
• Ando et al, Torsion-bar Antenna for Low-frequency Gravitational-wave Observations,
Phys. Rev. Lett. 105, 161101 (2010)
• T. Shimoda et al, Seismic cross- coupling noise in torsion pendulums, Phys. Rev. D,
vol. 97, p. 104003, (2018)
• G.T Giles and R.C Ritter, Torsion balances, torsion pendulums, and related devices,
Review of Scientific Instruments 64, 283 (1993)
• Cagnoli et al, Damping dilution factor for a pendulum in an interferometric gravita-
tional waves detector, Physics Letters A 272 2000 3945 gravitational waves detector
17