cinematique du point -...
TRANSCRIPT
CINEMATIQUE DU POINT
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 1/10
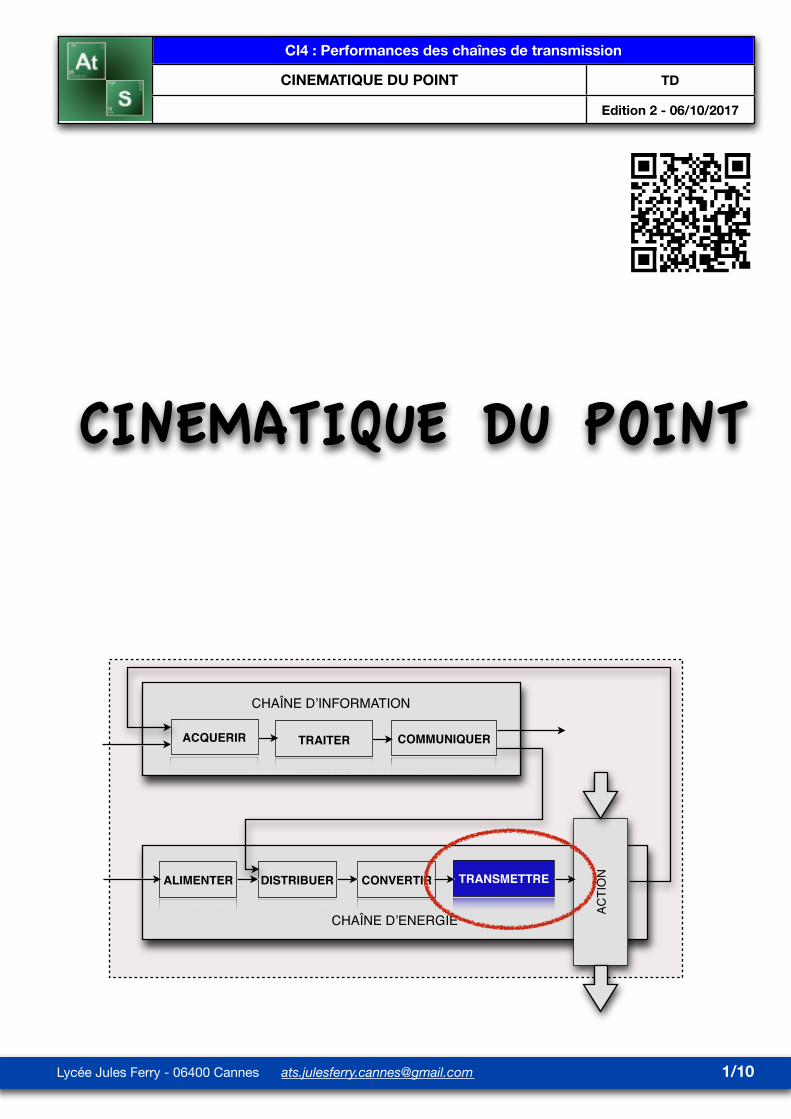
CHAÎNE D’INFORMATION
ACQUERIR TRAITER COMMUNIQUER
CHAÎNE D’ENERGIE
ALIMENTER DISTRIBUER CONVERTIR TRANSMETTRE
ACTI
ON

PROBLEMATIQUE
« La chaîne d’énergie a pour fonction la réalisation d’actions
en vue de produire un effet sur la matière d’oeuvre.
Il y a quasiment systématiquement l’existence de
mouvements, qu’il est nécessaire de pouvoir modéliser afin de pouvoir vérifier la conformité de l’action par rapport au
cahier des charges »
B - MODELISERB - MODELISERB - MODELISERB1 : Identifier et caractériser les grandeurs physiques agissant sur un système
Proposer des hypothèses simplificatrices en vue de la modélisation
B2 Proposer un modèle de connaissance et de comportement
Paramétrer les mouvements d’un solide indéformable
C - RESOUDREC - RESOUDREC - RESOUDREC1 : Choisir une démarche de résolution Proposer une démarche permettant de déterminer une loi de mouvement
C2 : Procéder à la mise en œuvre d'une démarche de résolution analytique
Déterminer les courants et les tensions dans les composantsDéterminer les puissances échangées
C2 : Procéder à la mise en œuvre d'une démarche de résolution analytique
Déterminer la trajectoire d’un point d’un solide par rapport à un autre C2 : Procéder à la mise en œuvre d'une démarche de résolution analytique Déterminer le vecteur vitesse d’un point d’un solide par rapport à un autre C2 : Procéder à la mise en œuvre d'une démarche de résolution analytique
Déterminer le vecteur accélération d’un point d’un solide par rapport à un autre
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Problématique Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 2/10

SommaireA. _________________________________________________________Chaise de dentiste! 4
A.1.Présentation 4A.1.1. Mise en situationA.1.2. Données géométriquesA.1.3. Exigence à vérifier
A.2.Repères de travail 6A.2.1. Mise en place des repèresA.2.2. Changements de repère
A.3.Relations géométriques 6A.3.1. Relation angulaireA.3.2. Course fonction de l’angle du pantographeA.3.3. Angle du pantographe en fonction de la hauteurA.3.4. Course en fonction de la hauteur
B. ___________________________________________________________________Maxpid! 7
B.1.Présentation 7B.1.1. Mise en situationB.1.2. ParamétrageB.1.3. Exigence du cahier des charges
B.2.Etude géométrique 8B.2.1. Course en fonction de la rotationB.2.2. Rotation en fonction de la course
C. ________________________________________________________Notes personnelles! 9
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Sommaire Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 3/10

A. Chaise de dentiste
A.1. Présentation
A.1.1. Mise en situation
La chirurgie dentaire demande souvent que les patients soient allongés dans une position bien spécifique.
La société AIREL a développé une chaise automatisée permettant de positionner le patient dans une position compatible avec les actes du chirurgien.
L'élévation de la chaise est réalisée à l’aide d’un pantographe, mis en mouvement à l’aide d’un vérin électrique.
Position basse Position intermédiaire Position haute
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Chaise de dentiste Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 4/10

A.1.2. Données géométriques
Le système pantographe est détaillé ci-dessous :
AD! "!!
= a"x + b"y
DK! "!!
= 2DC! "!!
= 2c"x3
DB! "!!
= d"x3 + ey3!"!
AB! "!!
= l1"x6
HE! "!!
= 2HC! "!!
= 2c"x4
DE! "!!
= HK! "!!
= l2"y
HD! "!!
= KE! "!!
= l3"x
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Chaise de dentiste Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 5/10
a, b, c, d et e sont fixes, imposés par le mécanismes
l1, l2, l3 sont variables

A.1.3. Exigence à vérifier
La lecture du diagramme des exigences a permis d’identifier une exigence reliant la position de l’écrou à la hauteur du siège. : pour des raisons de dimensionnement du vérin, on doit respecter l1 ≤ 200 mm pour un
débattement l2 = 350 mm
A.2. Repères de travail
A.2.1. Mise en place des repères
Mettre en place les repères suivants :
• R3(D,!x3,!y3,!z3)
• R4 (H ,!x4 ,!y4 ,!z4 )
• R6 (A,!x6,!y6,!z6 )
A.2.2. Changements de repère
Tracer les figures de changement de repère suivantes :
• R3 ⇒ R , angle θ3
• R4 ⇒ R , angle θ4
• R6 ⇒ R , angle θ6
A.3. Relations géométriques
A.3.1. Relation angulaire
Déterminer une relation entre θ3 et θ4
A.3.2. Course fonction de l’angle du pantographe
En utilisant la fermeture géométrique AD! "!!
+ DB! "!!
+ BA! "!!
= 0"
, définir l1 et θ6 en fonction de θ3
A.3.3. Angle du pantographe en fonction de la hauteur
En utilisant une fermeture géométrique, déterminer θ3 en fonction de la longueur l2
A.3.4. Course en fonction de la hauteur
Montrer qu’il est possible de trouver une relation entre la position de l’écrou (variable l1 ) et la hauteur du siège
(variable l2 ).
En déduire si l’exigence du cahier des charges est respectée
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Chaise de dentiste Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 6/10

B. Maxpid
B.1. Présentation
B.1.1. Mise en situation
La société PELLENC commercialise un robot de récolte d’agrumes automatisé. Ce robot localise automatiquement les oranges mûres, et les saisit par une ventouse montée en bout de bras.
Pour que cette saisie soit correcte, la position du bras doit être parfaitement maîtrisée afin d’établir un contact idéal entre la ventouse et l’orange.
L e s o u s - s y s t è m e Maxpid (présent dans le laboratoire), a pour but d e r e m p l i r c e t t e fonction. Il est constitué d’une chaise, d’un bras, d’un bâti moteur, d’une vis et d’un écrou
B.1.2. Paramétrage
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Maxpid Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 7/10
AB! "!!
= a"x0 + b"y0
BC! "!!
= l1"x2
AC! "!!
= c"x1
a = -72 mmb = 80 mmc = 85 mm

B.1.3. Exigence du cahier des charges
Le diagramme des exigences REQ fait apparaître l’exigence suivante :
« La vitesse angulaire du bras par rapport au bâti doit au moins être égale à N1 = 500 tr /mn pour une vitesse
de déplacement de la tige égale à VC /R2 = 10 m.s−1 »
B.2. Etude géométrique
B.2.1. Course en fonction de la rotation
En utilisant une fermeture géométrique, déterminer l1 en fonction de θ1
Montrer que ce résultat peut se mettre sous la forme suivante :
l12 − a2 − b2 − c2 = −X cosY cosθ1 − X sinY sinθ1
Déterminer X et Y en fonction des dimensions du système
B.2.2. Rotation en fonction de la course
A partir de cette écriture, déterminer θ1 en fonction de l1 et de la géométrie du mécanisme.
En dérivant la relation trouvée, vérifier le respect de l’exigence du cahier des charges.
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Maxpid Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 8/10
C. Notes personnelles
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Notes personnelles Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 9/10

.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
.......................................................................................................................................................................................................................
Crédits : Modélisation géométrique - Dorian
CI4 : Performances des chaînes de transmissionCI4 : Performances des chaînes de transmission
CINEMATIQUE DU POINT TD
Notes personnelles Edition 2 - 06/10/2017
Lycée Jules Ferry - 06400 Cannes [email protected] 10/10