collaborative teleoperation via the internet ken goldberg, billy chen, rory solomon, bob farzin,...
Post on 21-Dec-2015
217 views
TRANSCRIPT

Collaborative Teleoperation via the
Internet
Ken Goldberg, Billy Chen, Rory Solomon, Bob Farzin, Derek Poon, Jacob Heitler,
Steve Bui UC Berkeley

Jason: an underwater robot

Collaborative Robot Control:
Camera
Camera
Ca
me
ra
Light
Jason

Related Work R Goertz and R. Thompson, 1954. H. Linstone and M. Turoff. 1975. A. K. Bejczy. 1980. R. D. Ballard, 1986. T. Sheridan. 1992. R. and L. Carpenter. 1993. O. Khatib, et al. 1996. K. Goldberg, et al. 1995. E Paulos and J. Canny. 1996. B. Dalton and K. Taylor. 1998. Y. Akatsuka, S. Goldberg, G, Bekey. 1998. R. Siegwart. 1998.
Delphi Method Developed at RAND Corporation in 1960’s a method of iterated polling a group submits votes, views results, discusses
results and repeats experimental results have shown that this
method converges very closely to the correct result when the group is posed with a question

Cinematrix
• Audience Members work collaboratively
• Everyone holds a red/green “paddle”

How can multiple users control one robot?
?…
User 1User 2
User n
The resource (robot) must use a control model which satisfies each user in a fair way.
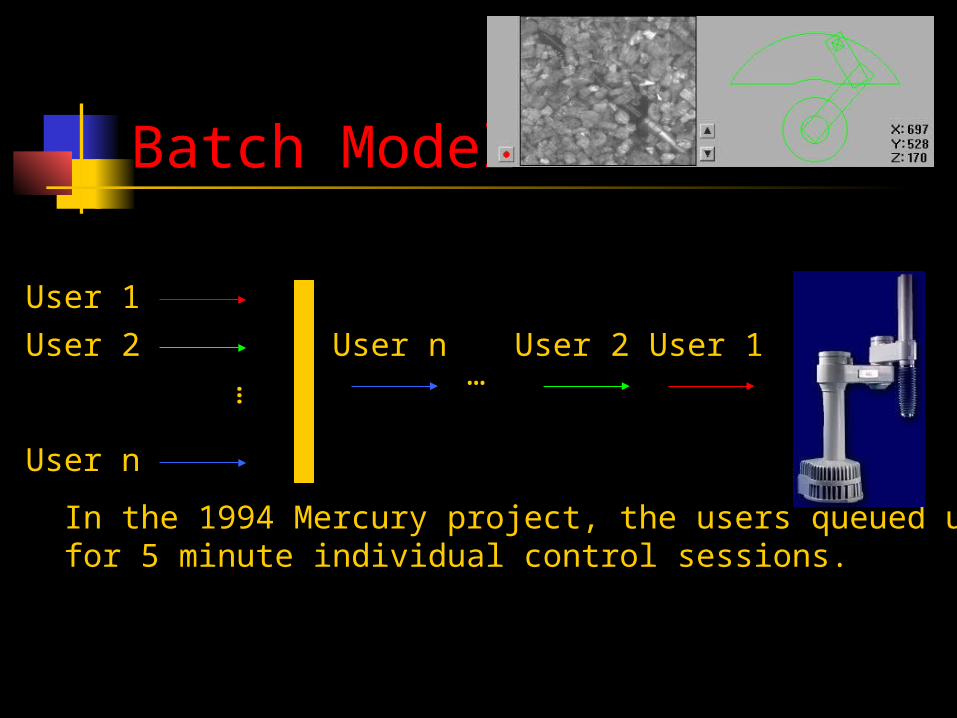
Batch Model
In the 1994 Mercury project, the users queued up for 5 minute individual control sessions.
…
User 1
User 2
User n
User n…
User 1User 2
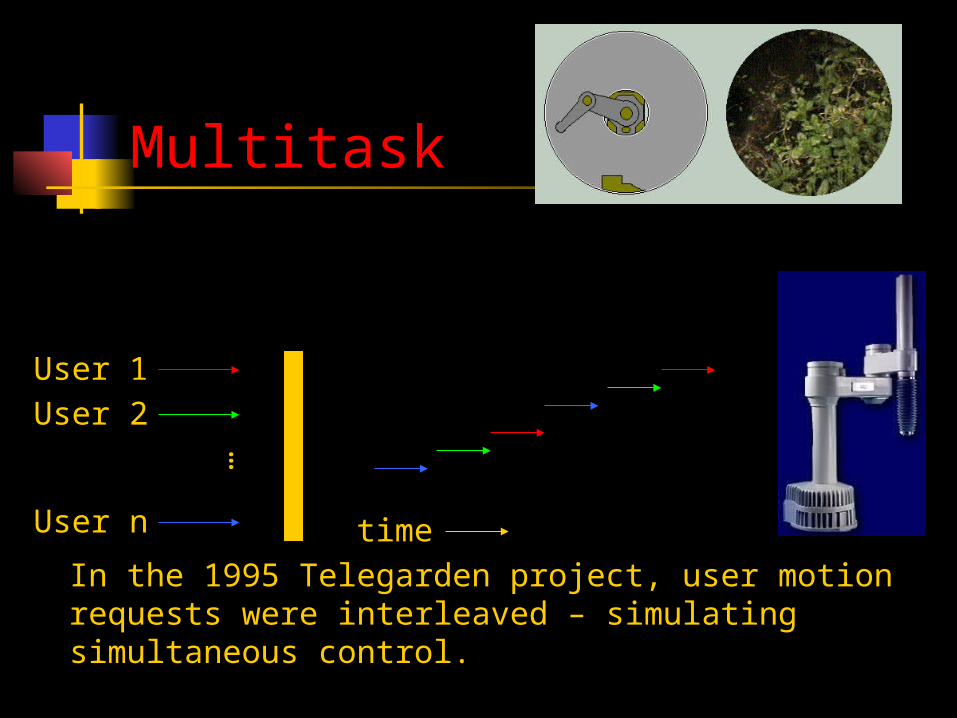
Multitask
In the 1995 Telegarden project, user motion requests were interleaved – simulating simultaneous control.
…
User 1User 2
User n time

Central Limit Theorem
Consider n noisy iid inputs: Xi.
As the number of inputs increases, the noise in the aggregate decreases with the square root of n.
n
X* =Xi ) - µ(

Collaborative Control aggregates user inputs:
In our control model, we aggregate all the user requests into a single request (collaborative control).
…
User 1User 2
User n
Aggregate

…
User 2
User n
…
User 1User 2
User n
…
User 1
…User 2
User n Collaborative
Control methods:
MultiTask
Batch

Application: Ouija board
A classic “game” One “planchette” Many players

System Architecture
Client
Internet
Webserver Video Card Robot Control Webserver C
CCD Camera Robot
Applet V Applet C

Client Interface: Java applet
• Top Window: video applet
• Streaming live video of the robot
• Bottom Window: planchette applet

Planchette Motion Model
Realistic motion Inertia Frictional drag

Hardware
• Two PC servers: one running Win98, one running Linux• Adept 604-S Robot arm • Panasonic CCD camera

Challenges Serial connetion OS: Linux vs. Windows streaming video: server-push vs.
Java applet: Inetcam

To test collaborative performance we used a maze.
Views with Noise:
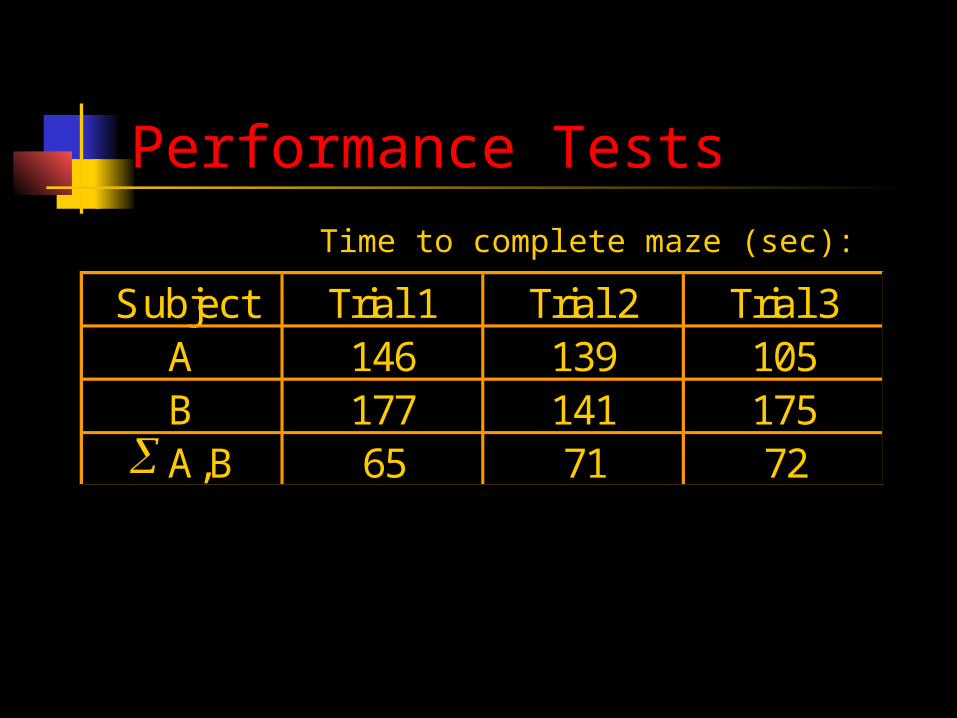
Performance Tests Time to complete maze (sec):
Subject Trial 1 Trial 2 Trial 3A 146 139 105B 177 141 175
A,B 65 71 72
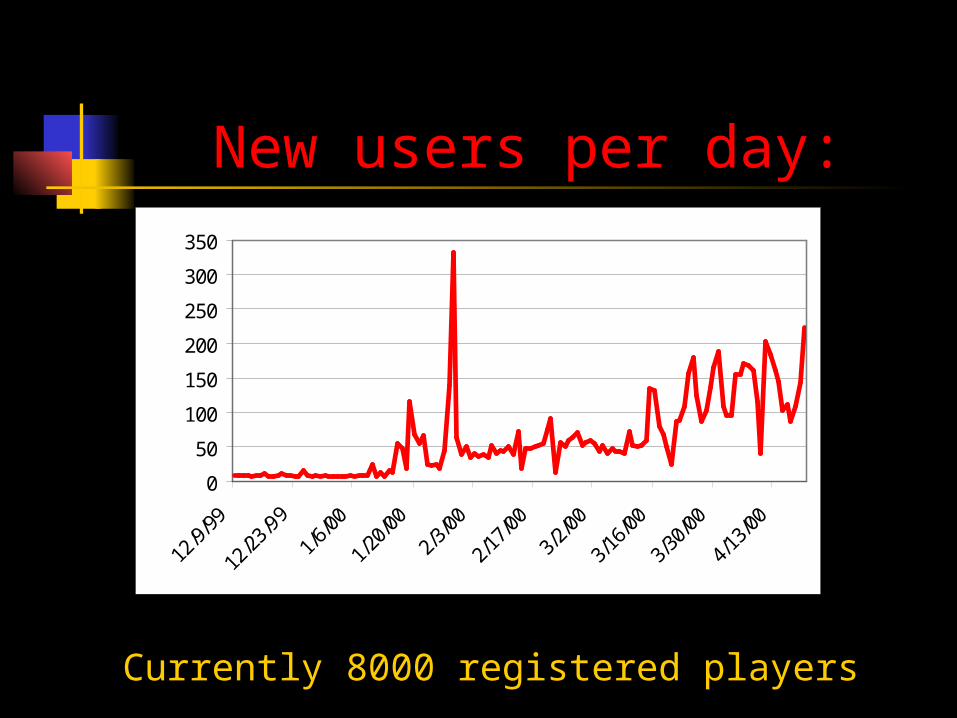
New users per day:
0
50
100
150
200
250
300
350
12/9/
99
12/23
/99
1/6/
00
1/20
/00
2/3/
00
2/17
/00
3/2/
00
3/16
/00
3/30
/00
4/13
/00
Currently 8000 registered players

Summary Introduction
Coping with many noisy sensors Batch, Multitasking, and Collaborative
control models Implementation
User Interface and Motion Model Experimental Results and
Conclusion

Future Work Different control models
Winner-take-all Input weighting based on prior
performance Different test conditions
Different time delays Different goals
http://ouija.berkeley.edu