communication manual 931e-931k profibus-dp ... -...
TRANSCRIPT
KHB 13.0004−EN.Bò*
Ä.Bò*ä
Communication Manual
Servo Drives 930
�
931EPx, 931KPx
PROFIBUS−DP
� 2 KHB 13.0004−EN 2.1
0Fig. 0Tab. 0
Contents i
� 3KHB 13.0004−EN 2.1
1 About this documentation 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Document history 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Conventions used 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Notes used 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Product description 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Product features 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Technical data 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Communication 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Electrical installation 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 Wiring 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Assignment of the interfaces 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 931E servo inverter 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2.2 931K servo inverter 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 PROFIBUS communication 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 The data telegram 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Structure of the receive message 15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.2 Structure of the response message 16 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.3 Structure of the receive and response message with PKW mechanism 16 .
5.2 Consistent parameter data 18 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6 Commissioning 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Important notes 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Initial switch−on 19 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Settings on the controller (slave) 20 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.1 Node address setting 21 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3.2 Definition of parameter numbers (PNU) in the telegram editor 24 . . . . . . .
6.4 Control system configuration 27 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5 "Speed control" mode 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.1 Description 28 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.2 Commissioning with PROFIdrive 29 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.3 PNUs for parameter setting 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6 "Positioning" mode 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.1 Setting of homing 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.2 Positioning 32 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.3 Static position data sets 35 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.4 Dynamic position data set 36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.5 Commissioning with PROFIdrive 37 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6.6 PNUs for parameter setting 38 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contentsi
� 4 KHB 13.0004−EN 2.1
6.7 Actual values 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.1 Actual position 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.2 Actual speed value 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.3 Actual value of active current 40 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.4 Digital outputs 41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.5 Digital inputs 41 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.6 Motor data 42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.7.7 Operating modes 42 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Parameter setting 43 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.1 Physical units 43 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Global parameters 45 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.1 Saving of parameter set 45 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.2 Setting of manual jog (inching mode) 45 . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2.3 Motor data 46 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 "Speed control" mode 47 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.1 Speed setpoint 47 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3.2 Acceleration value 48 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4 "Positioning" mode 49 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4.1 Selection of position data set for parameter setting 49 . . . . . . . . . . . . . . . .
7.4.2 Setting of positioning profile parameters 49 . . . . . . . . . . . . . . . . . . . . . . . . .
7.4.3 Position data set at starting of positioning 50 . . . . . . . . . . . . . . . . . . . . . . . .
7.4.4 Jerk limitation 50 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4.5 Homing modes 51 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.4.6 Homing offset 52 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.5 Error management 53 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.5.1 Setting of responses 53 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8 Device control 54 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Important notes 54 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 "Speed control" mode 55 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.1 Control word 1 55 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2.2 Status word 1 56 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3 "Positioning" mode 57 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.1 Control word 1 57 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.3.2 Status word 1 58 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4 State diagram 59 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Contents i
� 5KHB 13.0004−EN 2.1
9 Troubleshooting and fault elimination 61 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 Fault elimination 61 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Error messages 61 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Transfer of error messages 61 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.7 Table of error messages 62 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Appendix 66 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10.1 Table of parameter numbers (PNU) 66 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11 Index 74 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
About this documentationDocument history
1
� 6 KHB 13.0004−EN 2.1
1 About this documentation
Contents
This documentation contains descriptions for PROFIBUS with servo inverters of the 931series.
� Note!
This documentation completes the mounting instructions coming with the931 servo inverter and the corresponding hardware manual.
The mounting instructions and the hardware manual contain safetyinstructions which must be observed!
ƒ The features of the PROFIBUS−DP for servo inverters of the 931 series are describedin detail.
ƒ Typical applications are illustrated by use of examples.
ƒ Furthermore, this documentation contains:
– the most important technical data for PROFIBUS communication;
– information on the installation and commissioning of the PROFIBUS network;
– information on the PROFIBUS data transfer, PROFIBUS monitoring functions,communication−relevant parameters, and different operating modes.
The theoretical connections are only explained as far as required for understanding thePROFIBUS communication for servo inverters of the 931 series.
All trade names listed in this manual are trademarks of their respective owners.
Validity information
The information given in this documentation is valid for servo inverters of the 931 series.
Target group
This documentation addresses to all persons designing, installing, commissioning, andsetting the servo inverters of the 931 series.
� Tip!
Documentation and software updates for further Lenze products can be foundon the Internet in the "Services & Downloads" area under
http://www.Lenze.com
1.1 Document history
Material number Version Description
.Bò* 2.1 07/2010 TD34 Textual supplement to chapter 4.1 and 5.1
13336309 4.0 07/2010 TD34 Extended by the servo inverter 931K, generalrevision
13201464 1.0 06/2007 TD23 First edition
About this documentationConventions used
1
� 7KHB 13.0004−EN 2.1
Your opinion is important to us!
These instructions were created to the best of our knowledge and belief to give you thebest possible support for handling our product.
If you have suggestions for improvement, please e−mail us to:
feedback−[email protected]
Thank you for your support.
Your Lenze documentation team
1.2 Conventions used
This documentation uses the following conventions to distinguish between differenttypes of information:
Type of information Identification Examples/notes
Spelling of numbers
Decimal separator Point In general, the decimal point is used.For instance: 1234.56
Text
Program name » « PC softwareFor example: »Engineer«, »Global DriveControl« (GDC)
Icons
Page reference � Reference to another page with additionalinformationFor instance: � 16 = see page 16
About this documentationNotes used
1
� 8 KHB 13.0004−EN 2.1
1.3 Notes used
The following pictographs and signal words are used in this documentation to indicatedangers and important information:
Safety instructions
Structure of safety instructions:
� Danger!
(characterises the type and severity of danger)
Note
(describes the danger and gives information about how to prevent dangeroussituations)
Pictograph and signal word Meaning
� Danger!
Danger of personal injury through dangerous electrical voltage.Reference to an imminent danger that may result in death orserious personal injury if the corresponding measures are nottaken.
� Danger!
Danger of personal injury through a general source of danger.Reference to an imminent danger that may result in death orserious personal injury if the corresponding measures are nottaken.
� Stop!Danger of property damage.Reference to a possible danger that may result in propertydamage if the corresponding measures are not taken.
Application notes
Pictograph and signal word Meaning
� Note! Important note to ensure troublefree operation
� Tip! Useful tip for simple handling
Reference to another documentation
Product descriptionProduct features
2
� 9KHB 13.0004−EN 2.1
2 Product description
2.1 Product features
ƒ Support of the PROFIBUS−DP−V0 communication profile
ƒ Drive profile:
– PROFIdrive
ƒ Automatic baud rate detection (9.6 kbps ... 12 Mbps)

Technical dataCommunication
3
� 10 KHB 13.0004−EN 2.1
3 Technical data
3.1 Communication
Field Values
Communication profile(DIN 19245 part 1 and part 3)
Profibus DP
Communication medium RS485
Drive profile PROFIdrive
Network topology Without repeater: line / with repeaters: line or tree
PROFIBUS−DP device Slave
Baud rate [kbps] 9.6 ... 12000
Maximum cable length per bussegment
1200 m (depending on baud rate and cable type)
Bus connection X4.1, X4.2 9−pin Sub−D socket (931E), 5−pin M12 connector (931K)
Electrical installationWiring
4
� 11KHB 13.0004−EN 2.1
4 Electrical installation
4.1 Wiring
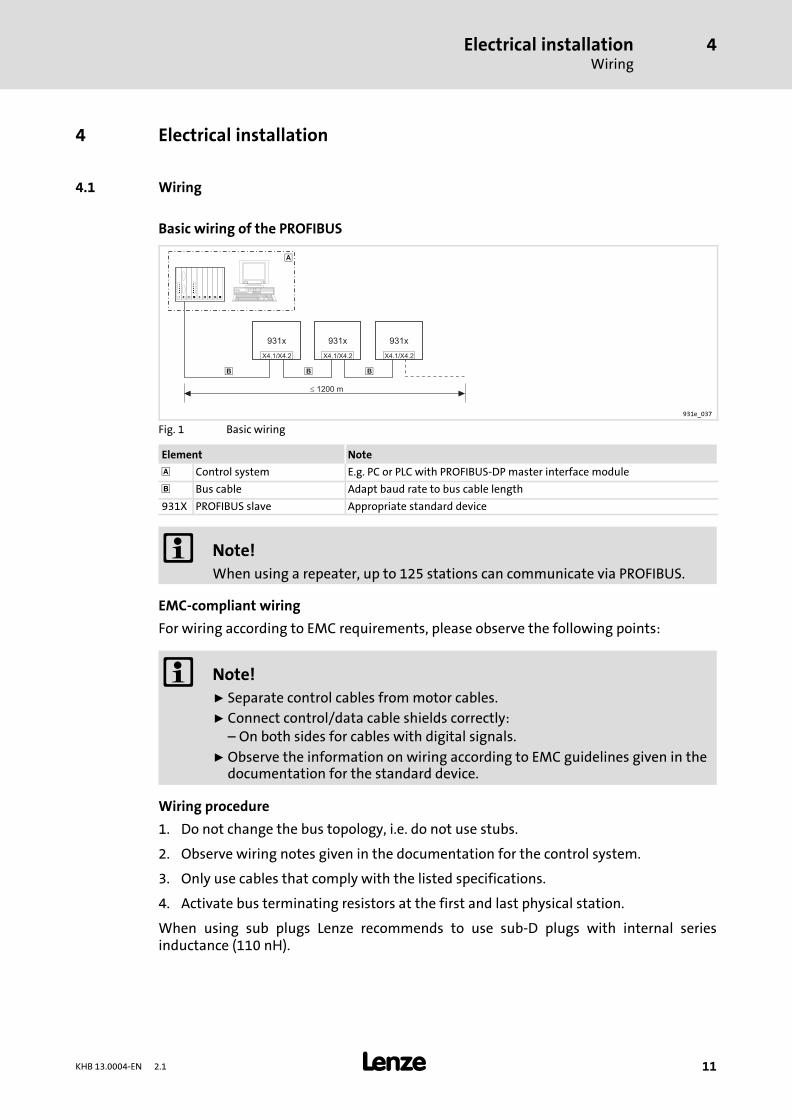
Basic wiring of the PROFIBUS
� 1200 m
931x 931x 931x
X4.1/X4.2 X4.1/X4.2 X4.1/X4.2
�
� � �
931e_037
Fig. 1 Basic wiring
Element Note
Control system E.g. PC or PLC with PROFIBUS−DP master interface module
� Bus cable Adapt baud rate to bus cable length
931X PROFIBUS slave Appropriate standard device
� Note!
When using a repeater, up to 125 stations can communicate via PROFIBUS.
EMC−compliant wiring
For wiring according to EMC requirements, please observe the following points:
� Note!
ƒ Separate control cables from motor cables.
ƒ Connect control/data cable shields correctly:– On both sides for cables with digital signals.
ƒ Observe the information on wiring according to EMC guidelines given in thedocumentation for the standard device.
Wiring procedure
1. Do not change the bus topology, i.e. do not use stubs.
2. Observe wiring notes given in the documentation for the control system.
3. Only use cables that comply with the listed specifications.
4. Activate bus terminating resistors at the first and last physical station.
When using sub plugs Lenze recommends to use sub−D plugs with internal seriesinductance (110 nH).
Electrical installationWiring
4
� 12 KHB 13.0004−EN 2.1
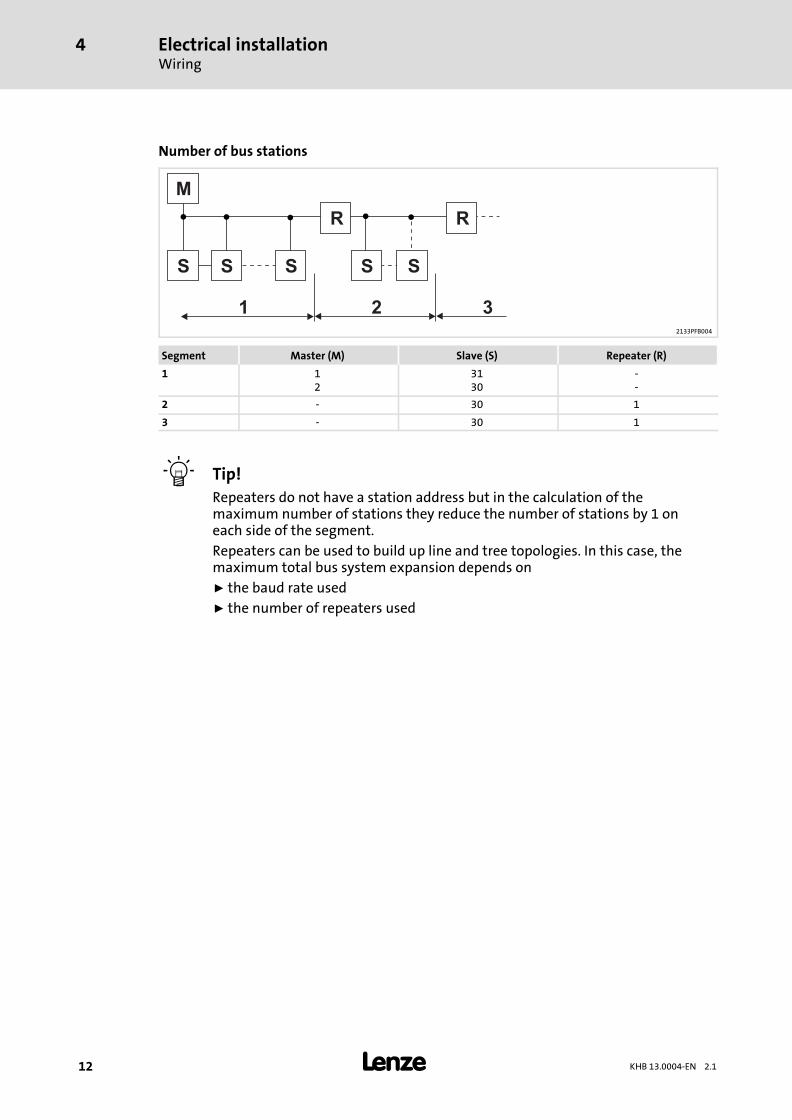
Number of bus stations
M
1 2 3
S S S S S
R R
2133PFB004
Segment Master (M) Slave (S) Repeater (R)
1 12
3130
−−
2 − 30 1
3 − 30 1
� Tip!
Repeaters do not have a station address but in the calculation of themaximum number of stations they reduce the number of stations by 1 oneach side of the segment.
Repeaters can be used to build up line and tree topologies. In this case, themaximum total bus system expansion depends on
ƒ the baud rate used
ƒ the number of repeaters used
Electrical installationWiring
4
� 13KHB 13.0004−EN 2.1
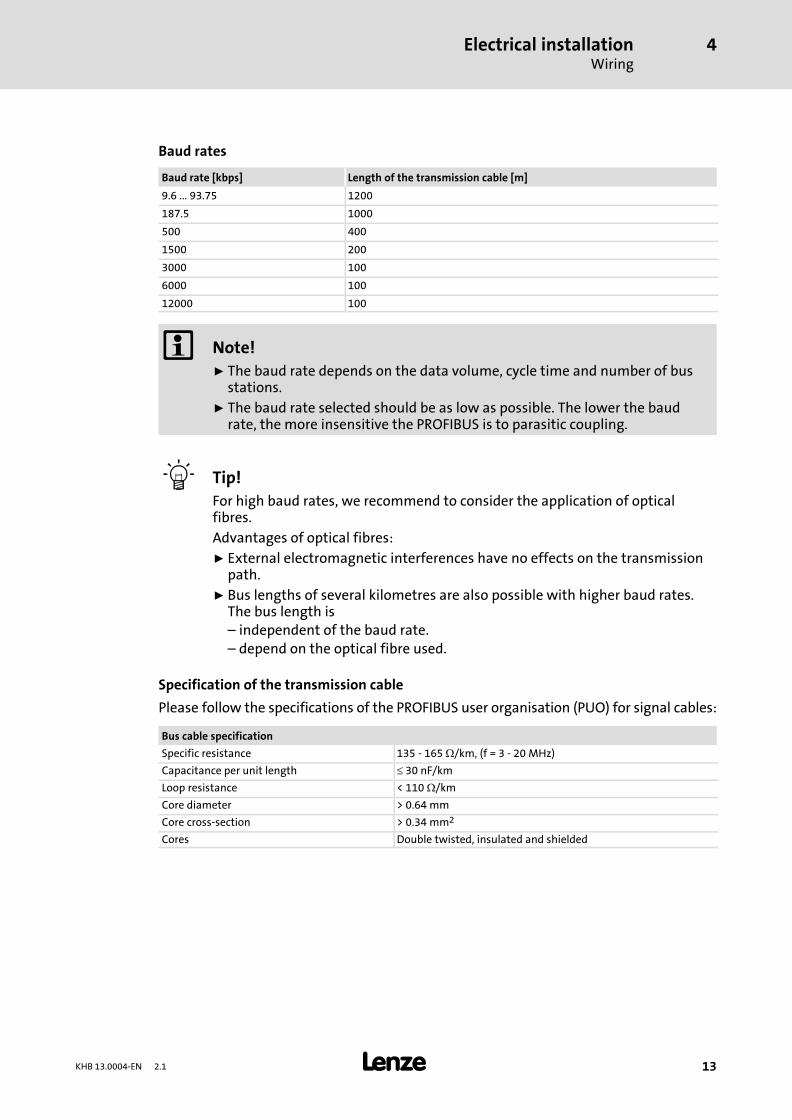
Baud rates
Baud rate [kbps] Length of the transmission cable [m]
9.6 ... 93.75 1200
187.5 1000
500 400
1500 200
3000 100
6000 100
12000 100
� Note!
ƒ The baud rate depends on the data volume, cycle time and number of busstations.
ƒ The baud rate selected should be as low as possible. The lower the baudrate, the more insensitive the PROFIBUS is to parasitic coupling.
� Tip!
For high baud rates, we recommend to consider the application of opticalfibres.
Advantages of optical fibres:
ƒ External electromagnetic interferences have no effects on the transmissionpath.
ƒ Bus lengths of several kilometres are also possible with higher baud rates.The bus length is– independent of the baud rate.– depend on the optical fibre used.
Specification of the transmission cable
Please follow the specifications of the PROFIBUS user organisation (PUO) for signal cables:
Bus cable specification
Specific resistance 135 − 165 �/km, (f = 3 − 20 MHz)
Capacitance per unit length � 30 nF/km
Loop resistance < 110 �/km
Core diameter > 0.64 mm
Core cross−section > 0.34 mm2
Cores Double twisted, insulated and shielded
Electrical installationAssignment of the interfaces931E servo inverter
4
� 14 KHB 13.0004−EN 2.1
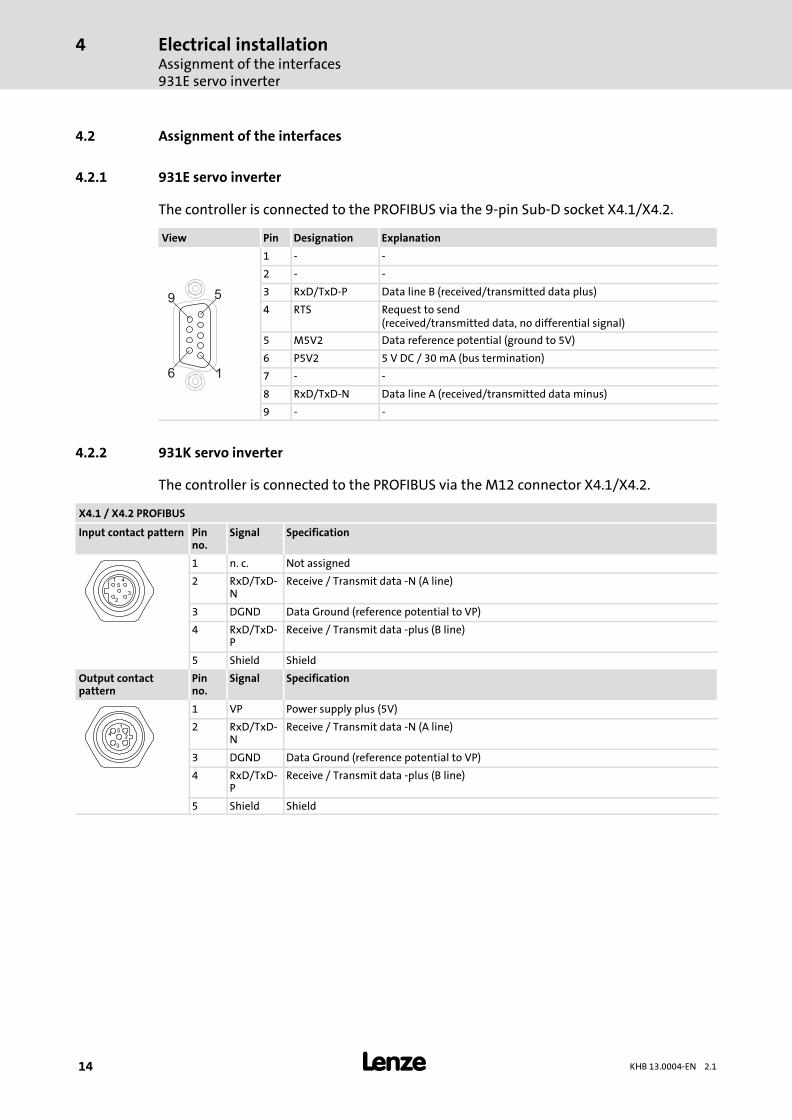
4.2 Assignment of the interfaces
4.2.1 931E servo inverter
The controller is connected to the PROFIBUS via the 9−pin Sub−D socket X4.1/X4.2.
View Pin Designation Explanation
16
59
1 − −
2 − −
3 RxD/TxD−P Data line B (received/transmitted data plus)
4 RTS Request to send(received/transmitted data, no differential signal)
5 M5V2 Data reference potential (ground to 5V)
6 P5V2 5 V DC / 30 mA (bus termination)
7 − −
8 RxD/TxD−N Data line A (received/transmitted data minus)
9 − −
4.2.2 931K servo inverter
The controller is connected to the PROFIBUS via the M12 connector X4.1/X4.2.
X4.1 / X4.2 PROFIBUS
Input contact pattern Pinno.
Signal Specification
1 n. c. Not assigned
2 RxD/TxD−N
Receive / Transmit data −N (A line)
3 DGND Data Ground (reference potential to VP)
4 RxD/TxD−P
Receive / Transmit data −plus (B line)
5 Shield Shield
Output contactpattern
Pinno.
Signal Specification
1 VP Power supply plus (5V)
2 RxD/TxD−N
Receive / Transmit data −N (A line)
3 DGND Data Ground (reference potential to VP)
4 RxD/TxD−P
Receive / Transmit data −plus (B line)
5 Shield Shield
PROFIBUS communicationThe data telegram
Structure of the receive message
5
� 15KHB 13.0004−EN 2.1
5 PROFIBUS communication
5.1 The data telegram
The controller supports the communication protocol DP in the power section DP−V0. Thecontroller and the PLC communicate via receive telegram and response telegram. Enterparameter numbers (PNU) in these telegrams to address objects of the drive (e.g. processdata and parameter data). Telegrams are transmitted cyclically. The telegram lengthdepends on the settings of the telegram editor in the SDC.
ƒ Receive telegrams contain output data which is transmitted from the PLC (master)to the controller (slave).
ƒ Response telegrams contain input data which is transmitted from thecontroller (slave) to the PLC (master).
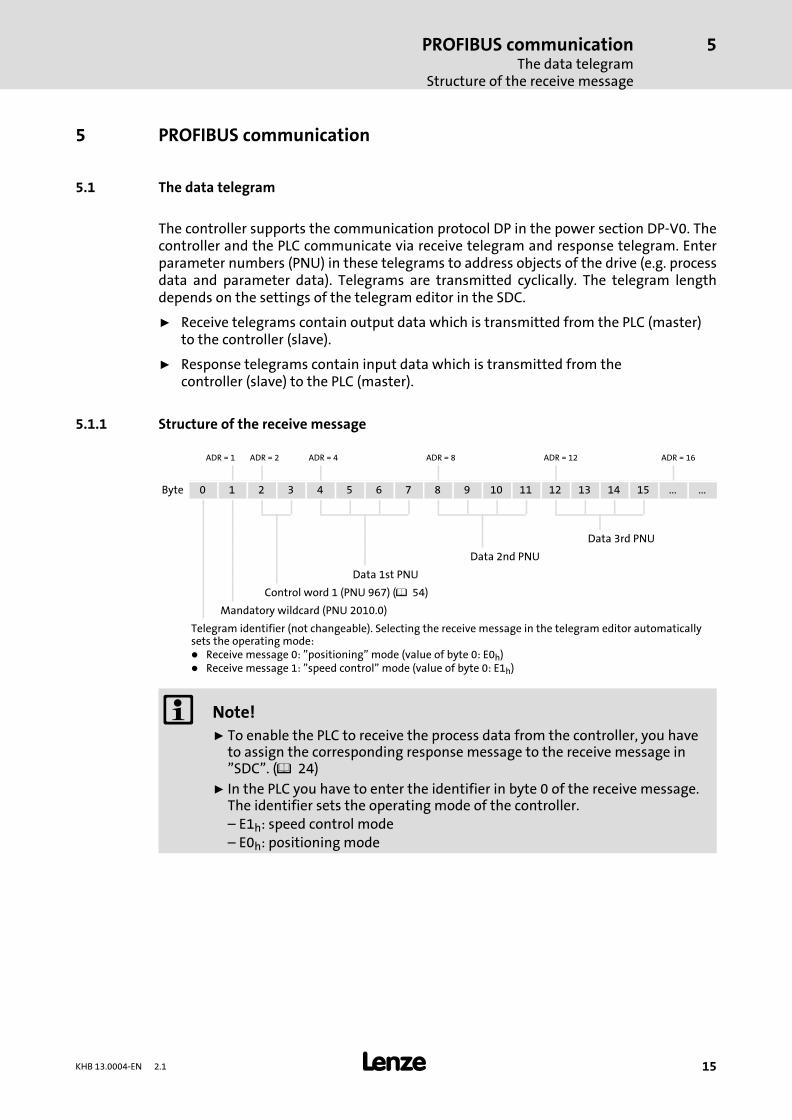
5.1.1 Structure of the receive message
ADR = 1 ADR = 2 ADR = 4 ADR = 8 ADR = 12 ADR = 16
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 ... ...
Data 3rd PNU
Data 2nd PNU
Data 1st PNU
Control word 1 (PNU 967) (� 54)
Mandatory wildcard (PNU 2010.0)
Telegram identifier (not changeable). Selecting the receive message in the telegram editor automaticallysets the operating mode:� Receive message 0: "positioning" mode (value of byte 0: E0h)� Receive message 1: "speed control" mode (value of byte 0: E1h)
� Note!
ƒ To enable the PLC to receive the process data from the controller, you haveto assign the corresponding response message to the receive message in"SDC". (� 24)
ƒ In the PLC you have to enter the identifier in byte 0 of the receive message.The identifier sets the operating mode of the controller.– E1h: speed control mode– E0h: positioning mode
PROFIBUS communicationThe data telegramStructure of the response message
5
� 16 KHB 13.0004−EN 2.1
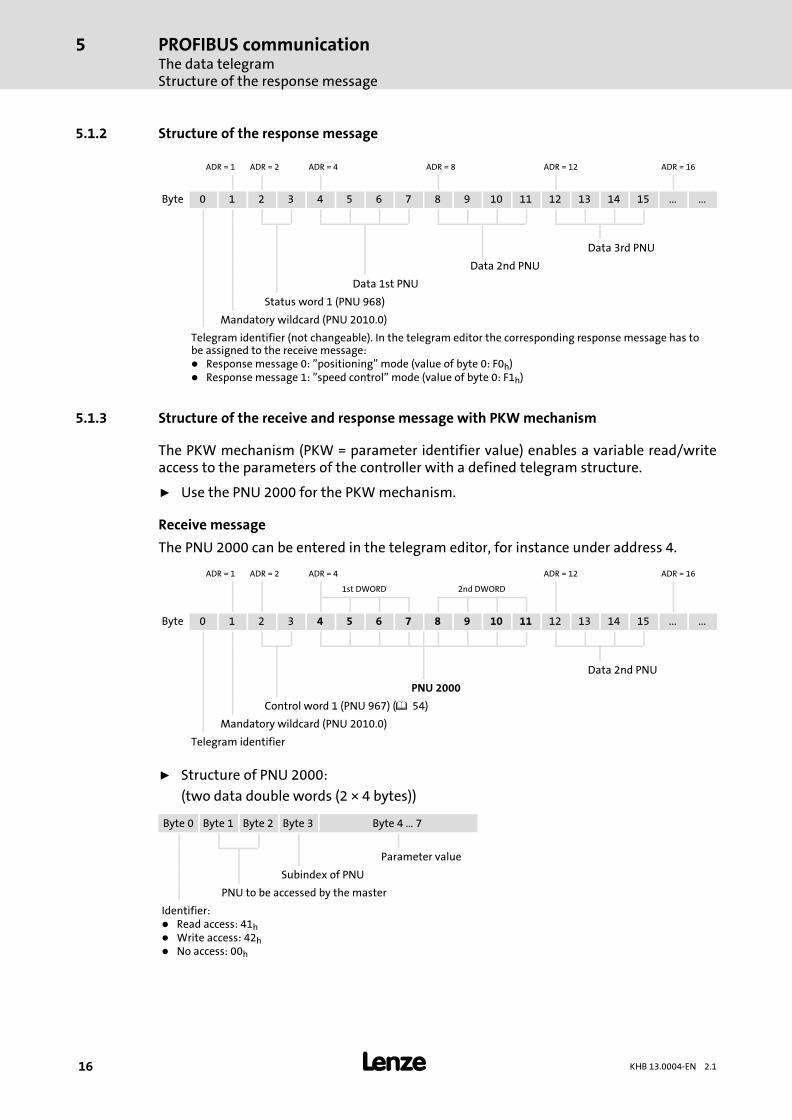
5.1.2 Structure of the response message
ADR = 1 ADR = 2 ADR = 4 ADR = 8 ADR = 12 ADR = 16
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 ... ...
Data 3rd PNU
Data 2nd PNU
Data 1st PNU
Status word 1 (PNU 968)
Mandatory wildcard (PNU 2010.0)
Telegram identifier (not changeable). In the telegram editor the corresponding response message has tobe assigned to the receive message:� Response message 0: "positioning" mode (value of byte 0: F0h)� Response message 1: "speed control" mode (value of byte 0: F1h)
5.1.3 Structure of the receive and response message with PKW mechanism
The PKW mechanism (PKW = parameter identifier value) enables a variable read/writeaccess to the parameters of the controller with a defined telegram structure.
ƒ Use the PNU 2000 for the PKW mechanism.
Receive message
The PNU 2000 can be entered in the telegram editor, for instance under address 4.
ADR = 1 ADR = 2 ADR = 4 ADR = 12 ADR = 16
1st DWORD 2nd DWORD
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 ... ...
Data 2nd PNU
PNU 2000
Control word 1 (PNU 967) (� 54)
Mandatory wildcard (PNU 2010.0)
Telegram identifier
ƒ Structure of PNU 2000:
(two data double words (2 × 4 bytes))
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 � 7
Parameter value
Subindex of PNU
PNU to be accessed by the master
Identifier:� Read access: 41h� Write access: 42h� No access: 00h
PROFIBUS communicationThe data telegram
Structure of the receive and response message with PKW mechanism
5
� 17KHB 13.0004−EN 2.1
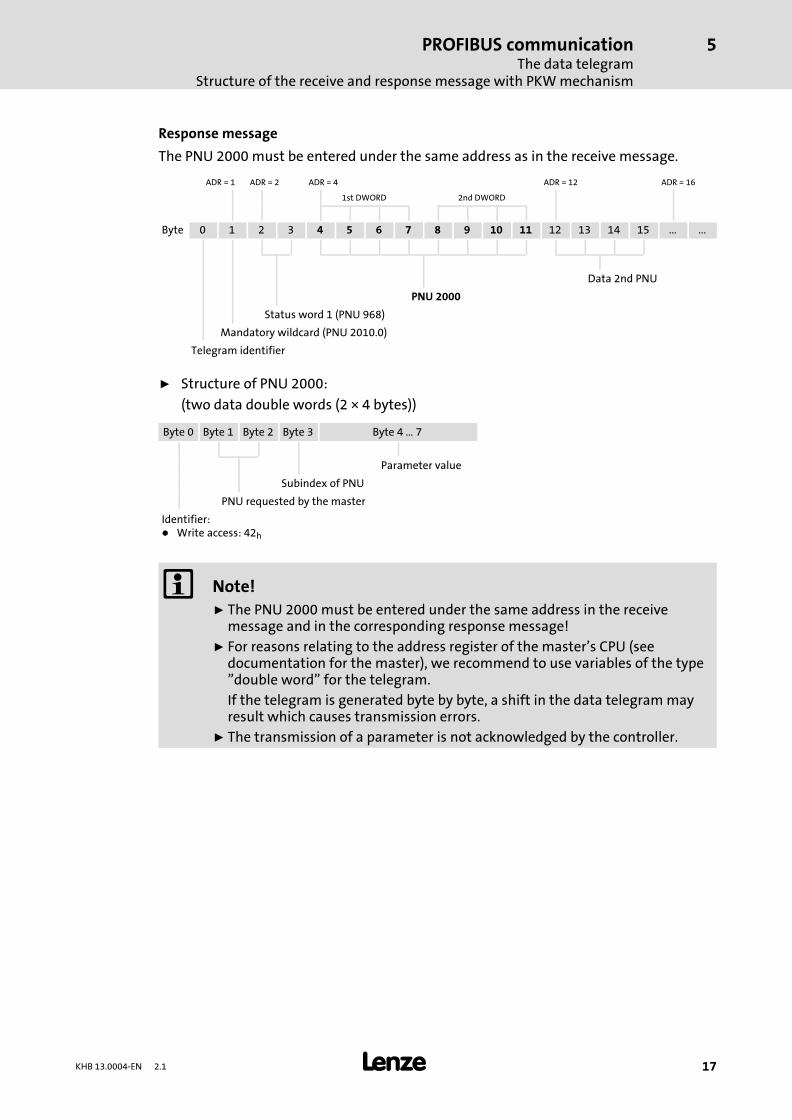
Response message
The PNU 2000 must be entered under the same address as in the receive message.
ADR = 1 ADR = 2 ADR = 4 ADR = 12 ADR = 16
1st DWORD 2nd DWORD
Byte 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 ... ...
Data 2nd PNU
PNU 2000
Status word 1 (PNU 968)
Mandatory wildcard (PNU 2010.0)
Telegram identifier
ƒ Structure of PNU 2000:
(two data double words (2 × 4 bytes))
Byte 0 Byte 1 Byte 2 Byte 3 Byte 4 � 7
Parameter value
Subindex of PNU
PNU requested by the master
Identifier:� Write access: 42h
� Note!
ƒ The PNU 2000 must be entered under the same address in the receivemessage and in the corresponding response message!
ƒ For reasons relating to the address register of the master’s CPU (seedocumentation for the master), we recommend to use variables of the type"double word" for the telegram.
If the telegram is generated byte by byte, a shift in the data telegram mayresult which causes transmission errors.
ƒ The transmission of a parameter is not acknowledged by the controller.
PROFIBUS communicationConsistent parameter dataStructure of the receive and response message with PKW mechanism
5
� 18 KHB 13.0004−EN 2.1
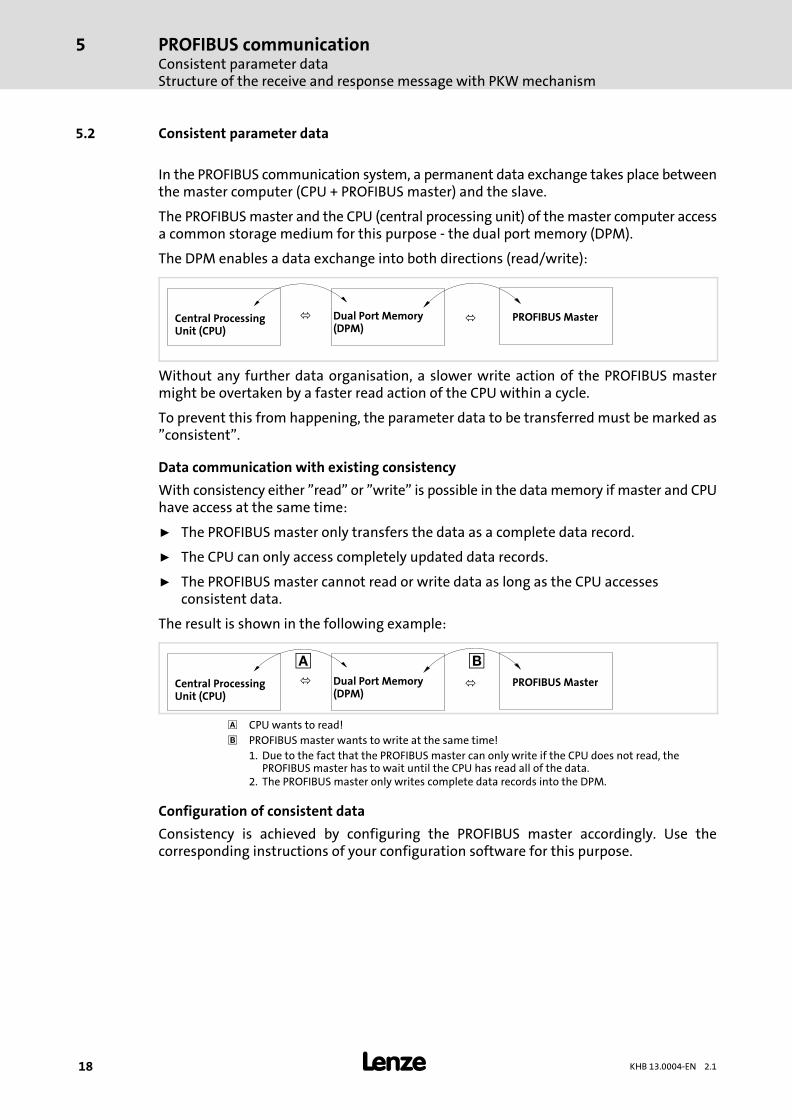
5.2 Consistent parameter data
In the PROFIBUS communication system, a permanent data exchange takes place betweenthe master computer (CPU + PROFIBUS master) and the slave.
The PROFIBUS master and the CPU (central processing unit) of the master computer accessa common storage medium for this purpose − the dual port memory (DPM).
The DPM enables a data exchange into both directions (read/write):
�� PROFIBUS MasterDual Port Memory(DPM)
Central ProcessingUnit (CPU)
Without any further data organisation, a slower write action of the PROFIBUS mastermight be overtaken by a faster read action of the CPU within a cycle.
To prevent this from happening, the parameter data to be transferred must be marked as"consistent".
Data communication with existing consistency
With consistency either "read" or "write" is possible in the data memory if master and CPUhave access at the same time:
ƒ The PROFIBUS master only transfers the data as a complete data record.
ƒ The CPU can only access completely updated data records.
ƒ The PROFIBUS master cannot read or write data as long as the CPU accessesconsistent data.
The result is shown in the following example:
�� PROFIBUS MasterDual Port Memory(DPM)
Central ProcessingUnit (CPU)
�
CPU wants to read!
� PROFIBUS master wants to write at the same time!
1. Due to the fact that the PROFIBUS master can only write if the CPU does not read, thePROFIBUS master has to wait until the CPU has read all of the data.
2. The PROFIBUS master only writes complete data records into the DPM.
Configuration of consistent data
Consistency is achieved by configuring the PROFIBUS master accordingly. Use thecorresponding instructions of your configuration software for this purpose.
CommissioningImportant notes
6
� 19KHB 13.0004−EN 2.1
6 Commissioning
6.1 Important notes
Before you switch on the controller for the first time in the PROFIBUS−DP network, check
ƒ the entire wiring for completeness, short circuit, and earth fault,
ƒ and whether the bus system is terminated by terminating resistors at the first andlast bus station.
6.2 Initial switch−on
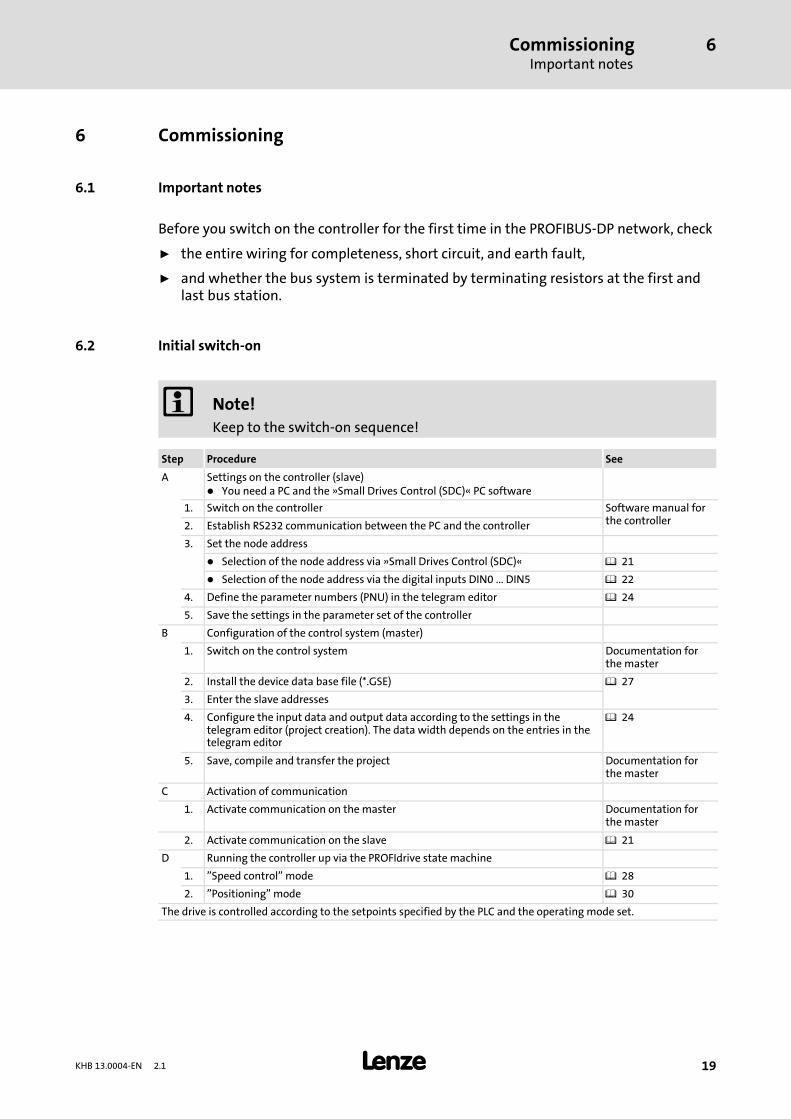
� Note!Keep to the switch−on sequence!
Step Procedure See
A Settings on the controller (slave)� You need a PC and the »Small Drives Control (SDC)« PC software
1. Switch on the controller Software manual forthe controller2. Establish RS232 communication between the PC and the controller
3. Set the node address
� Selection of the node address via »Small Drives Control (SDC)« � 21
� Selection of the node address via the digital inputs DIN0 ... DIN5 � 22
4. Define the parameter numbers (PNU) in the telegram editor � 24
5. Save the settings in the parameter set of the controller
B Configuration of the control system (master)
1. Switch on the control system Documentation forthe master
2. Install the device data base file (*.GSE) � 27
3. Enter the slave addresses
4. Configure the input data and output data according to the settings in thetelegram editor (project creation). The data width depends on the entries in thetelegram editor
� 24
5. Save, compile and transfer the project Documentation forthe master
C Activation of communication
1. Activate communication on the master Documentation forthe master
2. Activate communication on the slave � 21
D Running the controller up via the PROFIdrive state machine
1. "Speed control" mode � 28
2. "Positioning" mode � 30
The drive is controlled according to the setpoints specified by the PLC and the operating mode set.

CommissioningSettings on the controller (slave)
6
� 20 KHB 13.0004−EN 2.1
6.3 Settings on the controller (slave)
� Note!The controller parameters are set using the »Small Drives Control (SDC)« PCsoftware.
ƒ Establish an RS232 connection for communication between the PC and thecontroller. For a detailed description please refer to the controller’s softwaremanual.
ƒ Save all settings in the parameter set of the controller using the commandFile Parameter set Save parameter set (flash) to prevent the settingsfrom getting lost in the case of a reset or mains switching.
CommissioningSettings on the controller (slave)
Node address setting
6
� 21KHB 13.0004−EN 2.1
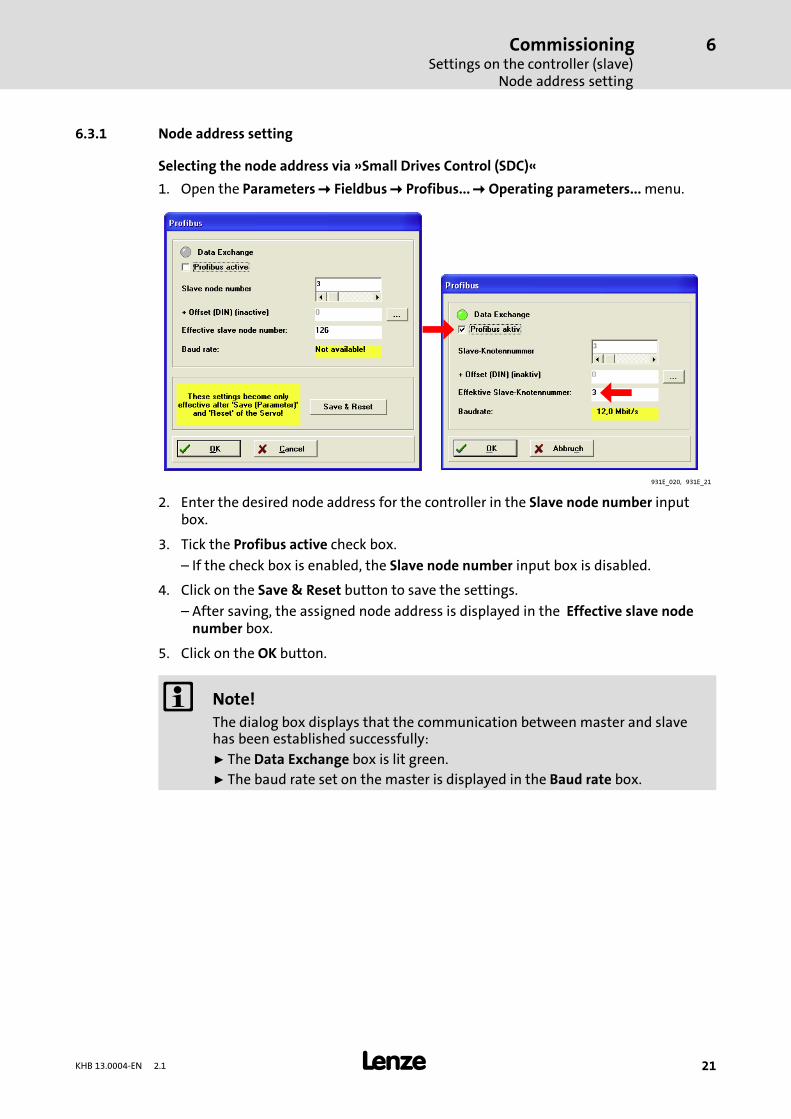
6.3.1 Node address setting
Selecting the node address via »Small Drives Control (SDC)«
1. Open the Parameters Fieldbus Profibus... Operating parameters... menu.
931E_020, 931E_21
2. Enter the desired node address for the controller in the Slave node number inputbox.
3. Tick the Profibus active check box.
– If the check box is enabled, the Slave node number input box is disabled.
4. Click on the Save & Reset button to save the settings.
– After saving, the assigned node address is displayed in the Effective slave nodenumber box.
5. Click on the OK button.
� Note!The dialog box displays that the communication between master and slavehas been established successfully:
ƒ The Data Exchange box is lit green.
ƒ The baud rate set on the master is displayed in the Baud rate box.
CommissioningSettings on the controller (slave)Node address setting
6
� 22 KHB 13.0004−EN 2.1
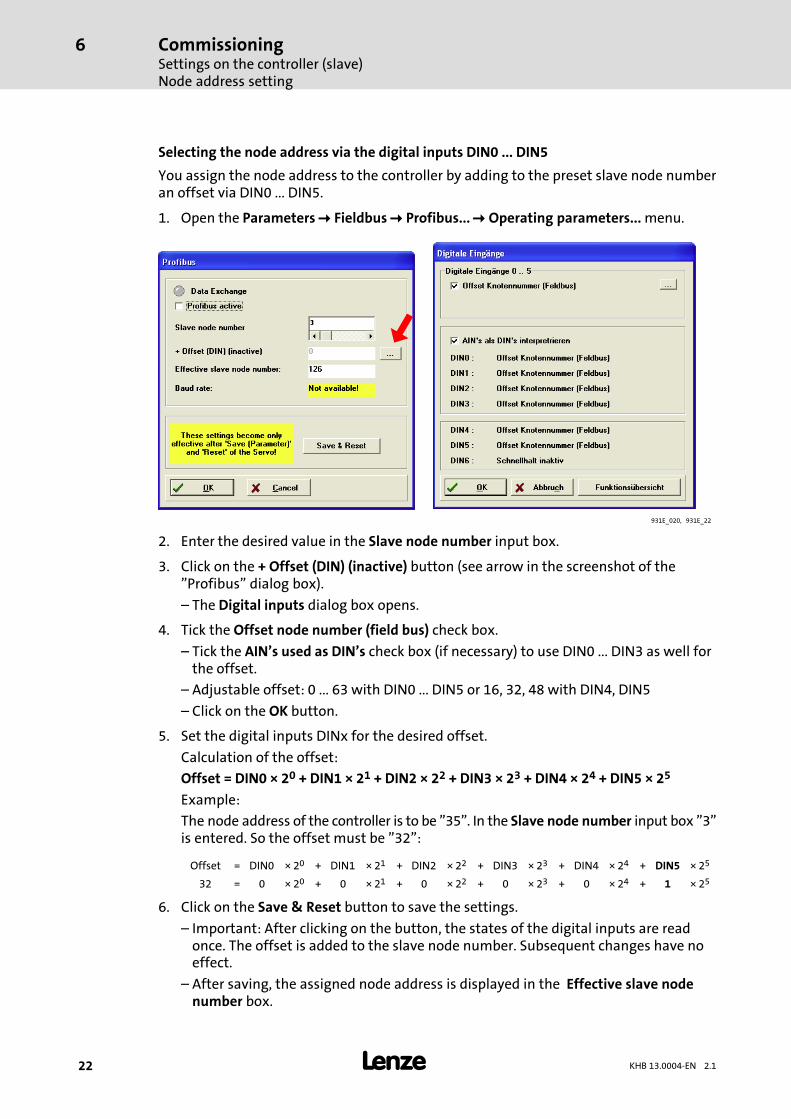
Selecting the node address via the digital inputs DIN0 ... DIN5
You assign the node address to the controller by adding to the preset slave node numberan offset via DIN0 ... DIN5.
1. Open the Parameters Fieldbus Profibus... Operating parameters... menu.
931E_020, 931E_22
2. Enter the desired value in the Slave node number input box.
3. Click on the + Offset (DIN) (inactive) button (see arrow in the screenshot of the"Profibus" dialog box).
– The Digital inputs dialog box opens.
4. Tick the Offset node number (field bus) check box.
– Tick the AIN’s used as DIN’s check box (if necessary) to use DIN0 ... DIN3 as well forthe offset.
– Adjustable offset: 0 ... 63 with DIN0 ... DIN5 or 16, 32, 48 with DIN4, DIN5
– Click on the OK button.
5. Set the digital inputs DINx for the desired offset.
Calculation of the offset:
Offset = DIN0 × 20 + DIN1 × 21 + DIN2 × 22 + DIN3 × 23 + DIN4 × 24 + DIN5 × 25
Example:
The node address of the controller is to be "35". In the Slave node number input box "3"is entered. So the offset must be "32":
Offset = DIN0 × 20 + DIN1 × 21 + DIN2 × 22 + DIN3 × 23 + DIN4 × 24 + DIN5 × 25
32 = 0 × 20 + 0 × 21 + 0 × 22 + 0 × 23 + 0 × 24 + 1 × 25
6. Click on the Save & Reset button to save the settings.
– Important: After clicking on the button, the states of the digital inputs are readonce. The offset is added to the slave node number. Subsequent changes have noeffect.
– After saving, the assigned node address is displayed in the Effective slave nodenumber box.
CommissioningSettings on the controller (slave)
Node address setting
6
� 23KHB 13.0004−EN 2.1
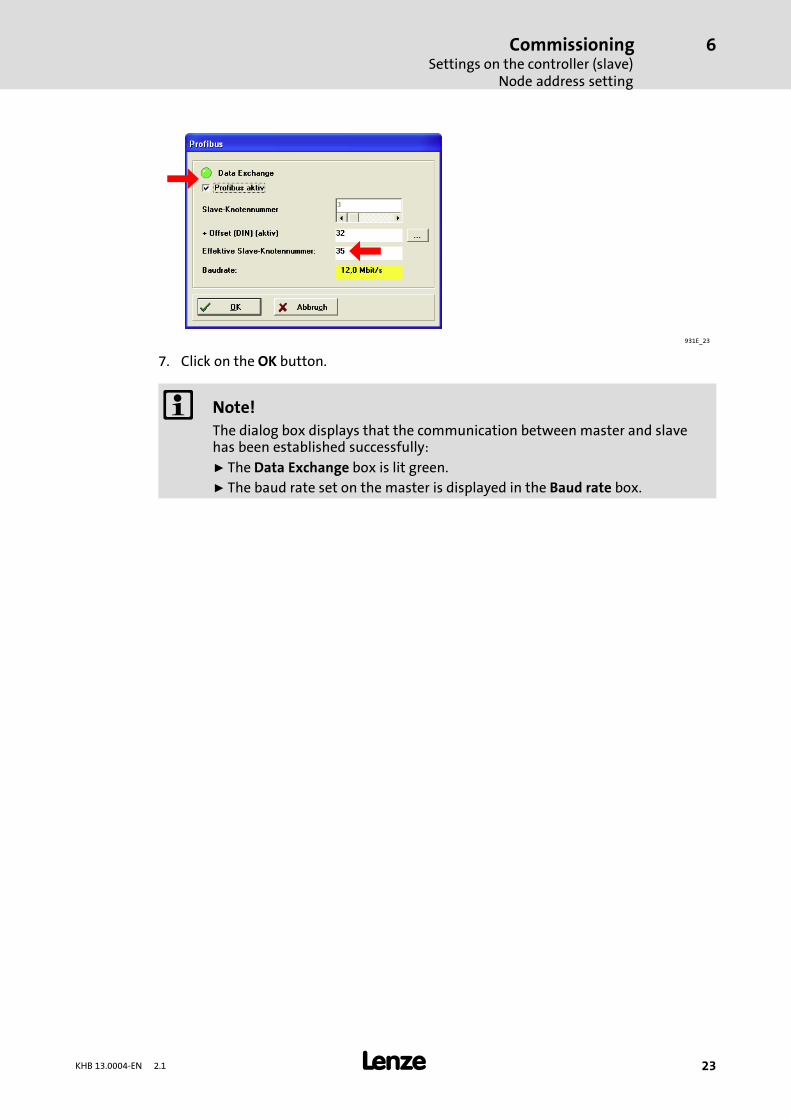
931E_23
7. Click on the OK button.
� Note!The dialog box displays that the communication between master and slavehas been established successfully:
ƒ The Data Exchange box is lit green.
ƒ The baud rate set on the master is displayed in the Baud rate box.
CommissioningSettings on the controller (slave)Definition of parameter numbers (PNU) in the telegram editor
6
� 24 KHB 13.0004−EN 2.1
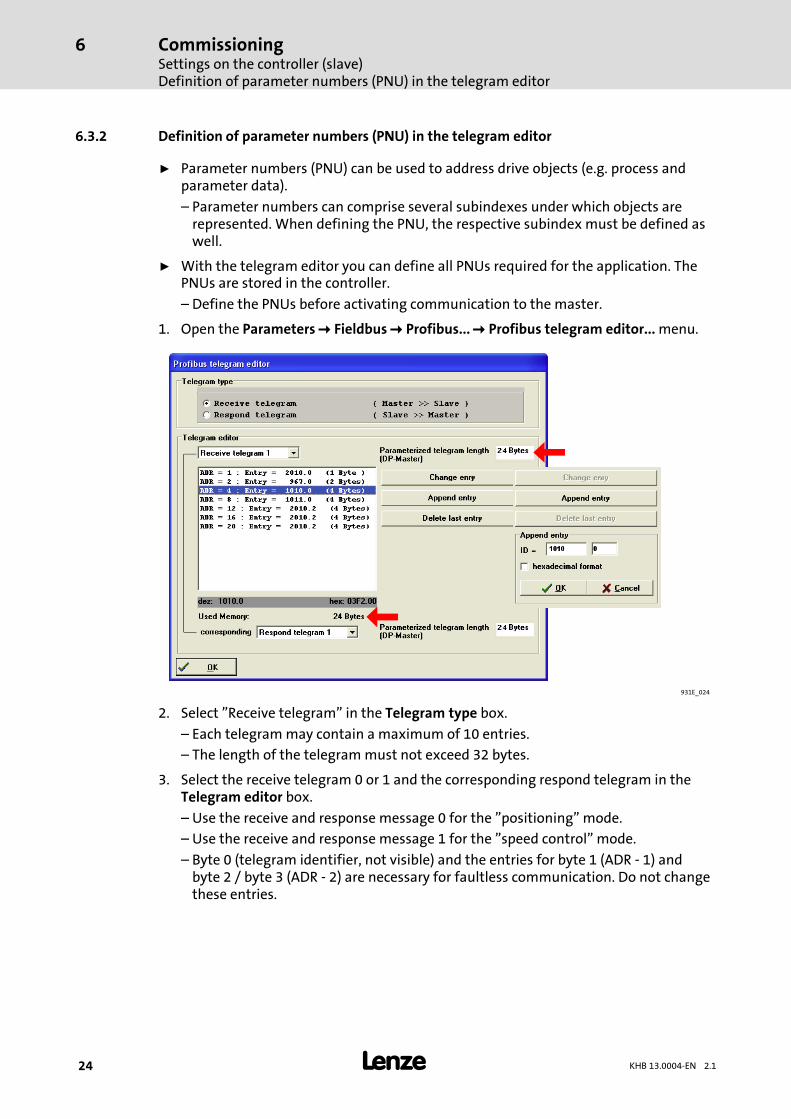
6.3.2 Definition of parameter numbers (PNU) in the telegram editor
ƒ Parameter numbers (PNU) can be used to address drive objects (e.g. process andparameter data).
– Parameter numbers can comprise several subindexes under which objects arerepresented. When defining the PNU, the respective subindex must be defined aswell.
ƒ With the telegram editor you can define all PNUs required for the application. ThePNUs are stored in the controller.
– Define the PNUs before activating communication to the master.
1. Open the Parameters Fieldbus Profibus... Profibus telegram editor... menu.
931E_024
2. Select "Receive telegram" in the Telegram type box.
– Each telegram may contain a maximum of 10 entries.
– The length of the telegram must not exceed 32 bytes.
3. Select the receive telegram 0 or 1 and the corresponding respond telegram in theTelegram editor box.
– Use the receive and response message 0 for the "positioning" mode.
– Use the receive and response message 1 for the "speed control" mode.
– Byte 0 (telegram identifier, not visible) and the entries for byte 1 (ADR − 1) andbyte 2 / byte 3 (ADR − 2) are necessary for faultless communication. Do not changethese entries.

CommissioningSettings on the controller (slave)
Definition of parameter numbers (PNU) in the telegram editor
6
� 25KHB 13.0004−EN 2.1
� Note!ƒ If the response message does not correspond to the receive message, the
master receives incorrect data from the controller.
ƒ In the PLC you have to enter the identifier in byte 0 of the receive message.The identifier sets the operating mode of the controller.– E1h: speed control mode– E0h: positioning mode
4. Click on the Append entry button to enter a PNU.
– If you want to enter the PNU in hexadecimal notation, activate the hexadecimalformat in the Append entry box.
– If you want to change a PNU, select the PNU and click on the Change entry button.
– If you want to delete the PNU entered last, click on the Delete last entry button.
� Note!ƒ If necessary, enter PNU 2010 as a wildcard to make the telegram length
match the parameterised telegram length of the master.
ƒ Check that the parameterised telegram length corresponds to the memoryallocation (see arrows in the screenshot of the "Profibus telegram editor"dialog box).
CommissioningSettings on the controller (slave)Definition of parameter numbers (PNU) in the telegram editor
6
� 26 KHB 13.0004−EN 2.1
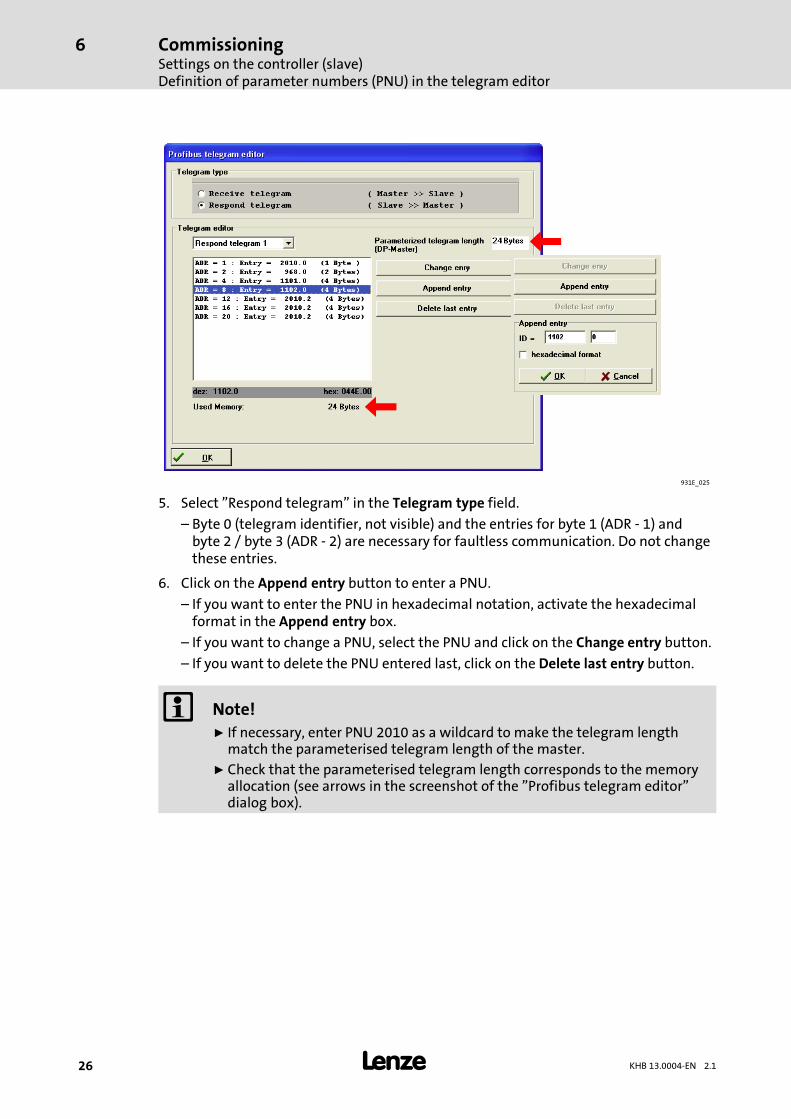
931E_025
5. Select "Respond telegram" in the Telegram type field.
– Byte 0 (telegram identifier, not visible) and the entries for byte 1 (ADR − 1) andbyte 2 / byte 3 (ADR − 2) are necessary for faultless communication. Do not changethese entries.
6. Click on the Append entry button to enter a PNU.
– If you want to enter the PNU in hexadecimal notation, activate the hexadecimalformat in the Append entry box.
– If you want to change a PNU, select the PNU and click on the Change entry button.
– If you want to delete the PNU entered last, click on the Delete last entry button.
� Note!ƒ If necessary, enter PNU 2010 as a wildcard to make the telegram length
match the parameterised telegram length of the master.
ƒ Check that the parameterised telegram length corresponds to the memoryallocation (see arrows in the screenshot of the "Profibus telegram editor"dialog box).
CommissioningControl system configuration
6
� 27KHB 13.0004−EN 2.1
6.4 Control system configuration
The control system must be configured before communication with the controller ispossible.
Installing the device data base file (*.GSE)
For the configuration you have to install the device data base file "931E0A6D.GSE" on themaster.
1. Download the GSE file from the Internet.
– You can find the GSE file in the "Services & Downloads" area athttp://www.Lenze.com .
2. Install the GSE file.
– Installation notes are given in the documentation for the master and in thedocumentation for the configuration tool.
Creating a project
ƒ Please refer to the documentation for the configuration tool if you want to create a project.
� Note!Use of data consistency
ƒ We recommend to use exclusively configurations with consistency to avoiddata conflicts between the PROFIBUS−DP master and the CPU of the controlsystem.– If the telegram has, for instance, a length of 8 bytes of data, the PLC must
be able to process the 8 bytes of data continuously (consistently).
ƒ Detailed description of consistency: (� 18)
ƒ Please note that the processing of consistent data varies between differentcontrol systems. This must be considered in the configuration tool.– It may be necessary to use system functions of the PLC to ensure the data
consistency.– Please refer to the documentation for the PLC to find out which data
length can be processed consistently by the CPU.
Commissioning"Speed control" modeDescription
6
� 28 KHB 13.0004−EN 2.1
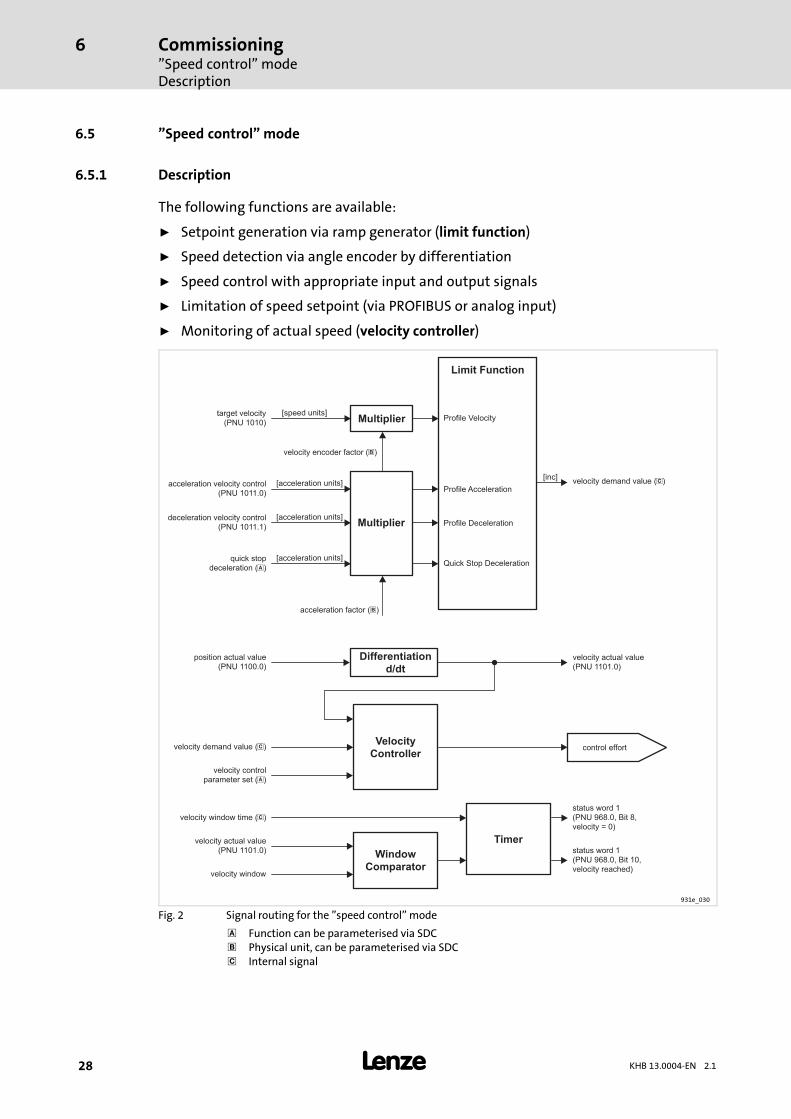
6.5 "Speed control" mode
6.5.1 Description
The following functions are available:
ƒ Setpoint generation via ramp generator (limit function)
ƒ Speed detection via angle encoder by differentiation
ƒ Speed control with appropriate input and output signals
ƒ Limitation of speed setpoint (via PROFIBUS or analog input)
ƒ Monitoring of actual speed (velocity controller)
[inc]
[speed units]
acceleration factor ( )�
velocity demand value ( )�
target velocity
(PNU 1010)
acceleration velocity control
(PNU 1011.0)
[acceleration units]
quick stop
deceleration ( )�
Velocity
Controller
Window
Comparator
Timer
position actual value
(PNU 1100.0)velocity actual value
(PNU 1101.0)
velocity demand value ( )�
velocity control
parameter set ( )�
velocity window time ( )�
velocity actual value
(PNU 1101.0)
velocity window
control effort
status word 1
(PNU 968.0, Bit 8,
velocity = 0)
status word 1
(PNU 968.0, Bit 10,
velocity reached)
Limit Function
Profile Velocity
Profile Acceleration
Profile Deceleration
Quick Stop Deceleration
Multiplier
[acceleration units]
[acceleration units]
Multiplierdeceleration
(PNU 1011.1)
velocity control
velocity encoder factor ( )�
Differentiation
d/dt
931e_030
Fig. 2 Signal routing for the "speed control" mode
Function can be parameterised via SDC� Physical unit, can be parameterised via SDC� Internal signal
Commissioning"Speed control" mode
Commissioning with PROFIdrive
6
� 29KHB 13.0004−EN 2.1
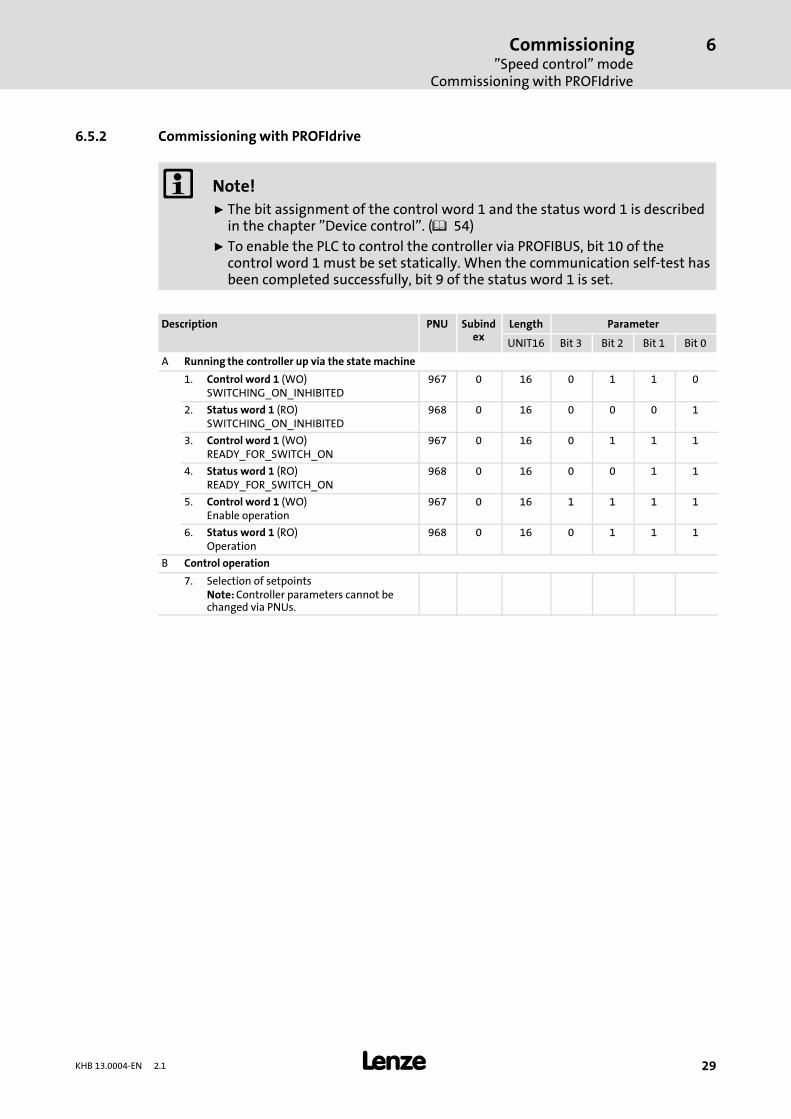
6.5.2 Commissioning with PROFIdrive
� Note!ƒ The bit assignment of the control word 1 and the status word 1 is described
in the chapter "Device control". (� 54)
ƒ To enable the PLC to control the controller via PROFIBUS, bit 10 of thecontrol word 1 must be set statically. When the communication self−test hasbeen completed successfully, bit 9 of the status word 1 is set.
Description PNU Subindex
Length Parameter
UNIT16 Bit 3 Bit 2 Bit 1 Bit 0
A Running the controller up via the state machine
1. Control word 1 (WO)SWITCHING_ON_INHIBITED
967 0 16 0 1 1 0
2. Status word 1 (RO)SWITCHING_ON_INHIBITED
968 0 16 0 0 0 1
3. Control word 1 (WO)READY_FOR_SWITCH_ON
967 0 16 0 1 1 1
4. Status word 1 (RO)READY_FOR_SWITCH_ON
968 0 16 0 0 1 1
5. Control word 1 (WO)Enable operation
967 0 16 1 1 1 1
6. Status word 1 (RO)Operation
968 0 16 0 1 1 1
B Control operation
7. Selection of setpointsNote: Controller parameters cannot bechanged via PNUs.
Commissioning"Positioning" modePNUs for parameter setting
6
� 30 KHB 13.0004−EN 2.1
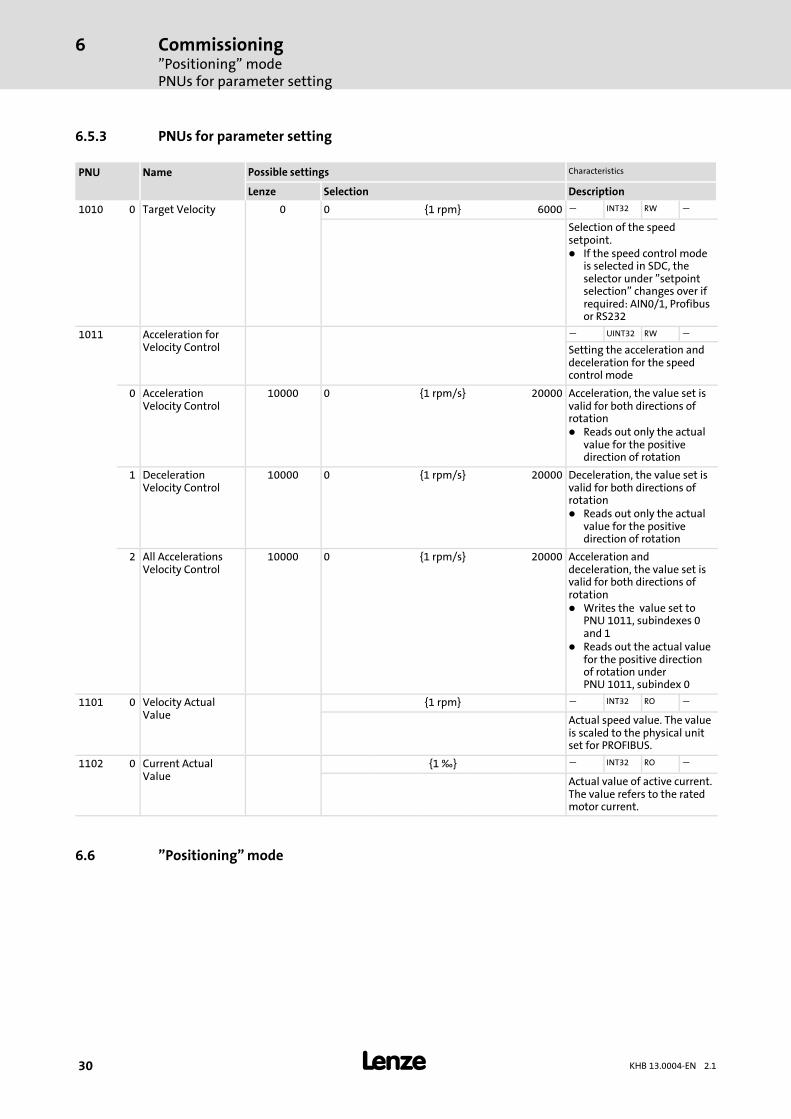
6.5.3 PNUs for parameter setting
PNU Name Possible settings Characteristics
Lenze Selection Description
1010 0 Target Velocity 0 0 {1 rpm} 6000 � INT32 RW �
Selection of the speedsetpoint.� If the speed control mode
is selected in SDC, theselector under "setpointselection" changes over ifrequired: AIN0/1, Profibusor RS232
1011 Acceleration forVelocity Control
� UINT32 RW �
Setting the acceleration anddeceleration for the speedcontrol mode
0 AccelerationVelocity Control
10000 0 {1 rpm/s} 20000 Acceleration, the value set isvalid for both directions ofrotation� Reads out only the actual
value for the positivedirection of rotation
1 DecelerationVelocity Control
10000 0 {1 rpm/s} 20000 Deceleration, the value set isvalid for both directions ofrotation� Reads out only the actual
value for the positivedirection of rotation
2 All AccelerationsVelocity Control
10000 0 {1 rpm/s} 20000 Acceleration anddeceleration, the value set isvalid for both directions ofrotation� Writes the value set to
PNU 1011, subindexes 0and 1
� Reads out the actual valuefor the positive directionof rotation underPNU 1011, subindex 0
1101 0 Velocity ActualValue
{1 rpm} � INT32 RO �
Actual speed value. The valueis scaled to the physical unitset for PROFIBUS.
1102 0 Current ActualValue
{1 �} � INT32 RO �
Actual value of active current.The value refers to the ratedmotor current.
6.6 "Positioning" mode
Commissioning"Positioning" mode
Setting of homing
6
� 31KHB 13.0004−EN 2.1
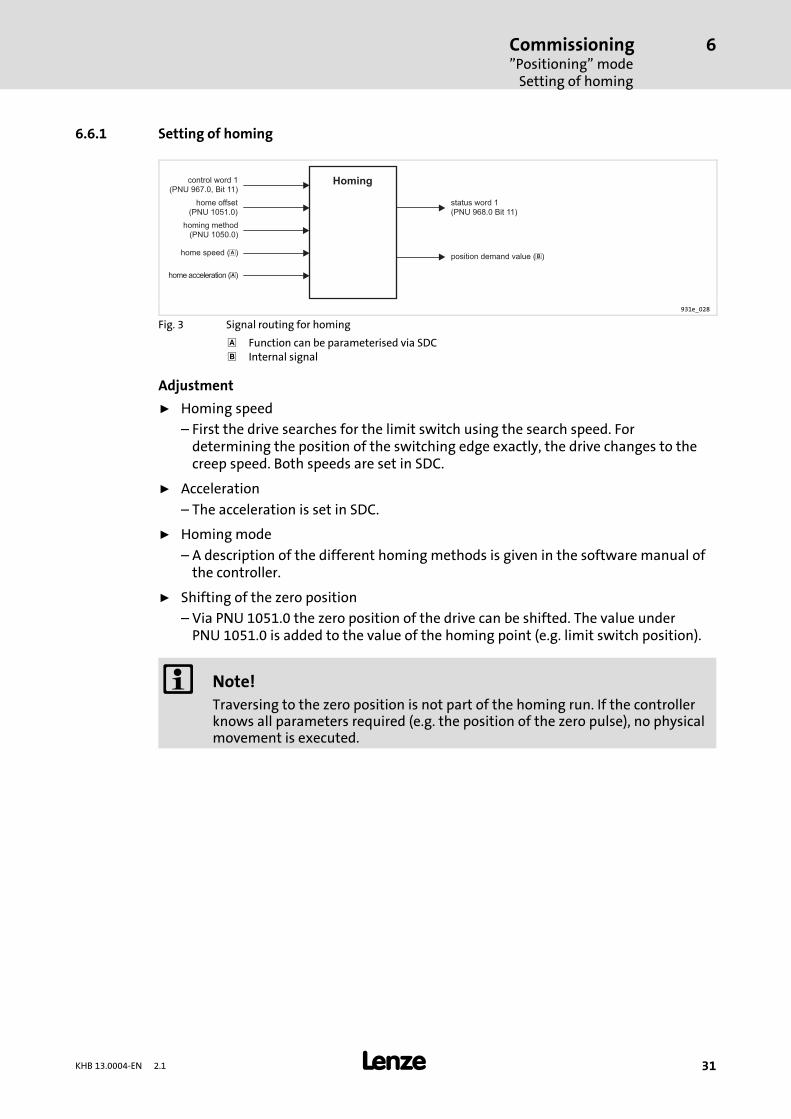
6.6.1 Setting of homing
Homing
status word 1
(PNU 968.0 Bit 11)
control word 1
(PNU 967.0, Bit 11)
homing method
(PNU 1050.0)
home speed ( )�
home acceleration ( )�
home offset
(PNU 1051.0)
position demand value ( )�
931e_028
Fig. 3 Signal routing for homing
Function can be parameterised via SDC� Internal signal
Adjustment
ƒ Homing speed
– First the drive searches for the limit switch using the search speed. Fordetermining the position of the switching edge exactly, the drive changes to thecreep speed. Both speeds are set in SDC.
ƒ Acceleration
– The acceleration is set in SDC.
ƒ Homing mode
– A description of the different homing methods is given in the software manual ofthe controller.
ƒ Shifting of the zero position
– Via PNU 1051.0 the zero position of the drive can be shifted. The value underPNU 1051.0 is added to the value of the homing point (e.g. limit switch position).
� Note!Traversing to the zero position is not part of the homing run. If the controllerknows all parameters required (e.g. the position of the zero pulse), no physicalmovement is executed.
Commissioning"Positioning" modePositioning
6
� 32 KHB 13.0004−EN 2.1
6.6.2 Positioning
acceleration positioning (PNU 1001.3)
deceleration
accelerationsall
positioning (PNU 1001.4)
positioning (PNU 1001.5)
Quick Stop
position profile type
(PNU 1003.0)
Trajectory
Generator
profile velocity (PNU 1001.1)
[inc]
position demand value ( )�Position
Control
Function
control effort ( )�
Limit
Function
[position units]target_postion
(PNU 1001.0)
home offset (PNU 1051.0)
Multiplier
position factor
polarity
( )
( )
�
�
�
�
position set number (PNU 1000)
931e_032
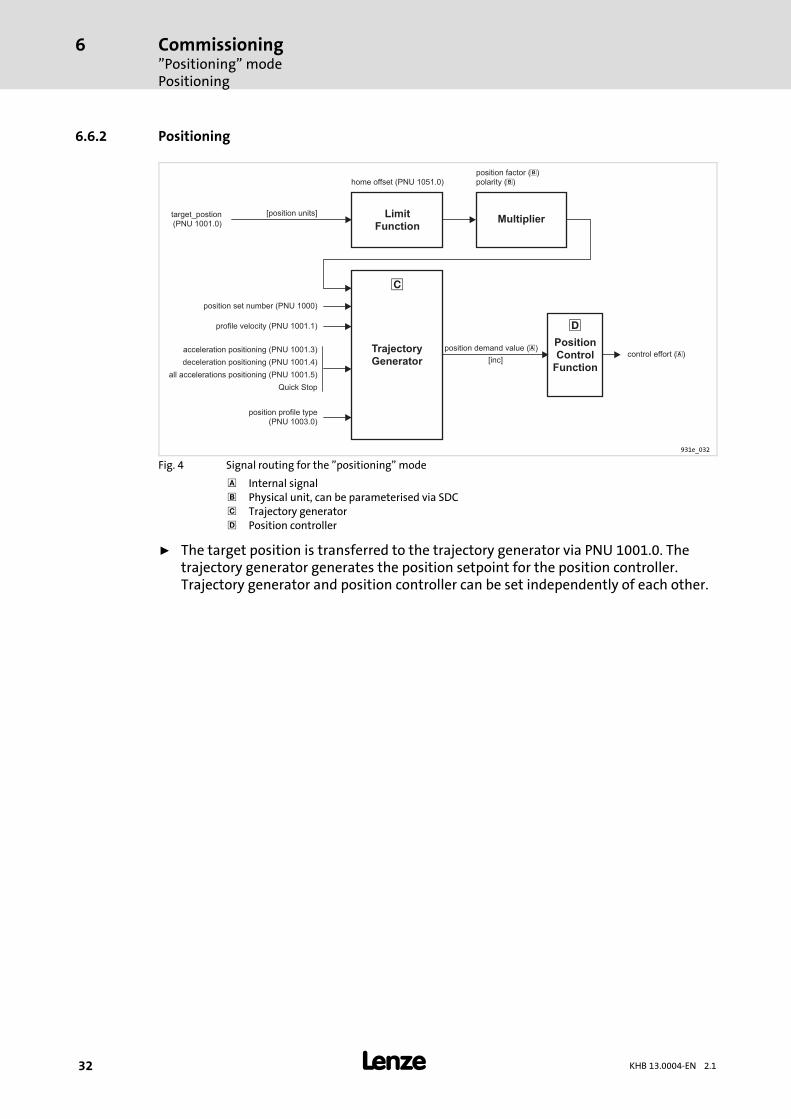
Fig. 4 Signal routing for the "positioning" mode
Internal signal� Physical unit, can be parameterised via SDC� Trajectory generator� Position controller
ƒ The target position is transferred to the trajectory generator via PNU 1001.0. Thetrajectory generator generates the position setpoint for the position controller.Trajectory generator and position controller can be set independently of each other.
Commissioning"Positioning" mode
Positioning
6
� 33KHB 13.0004−EN 2.1
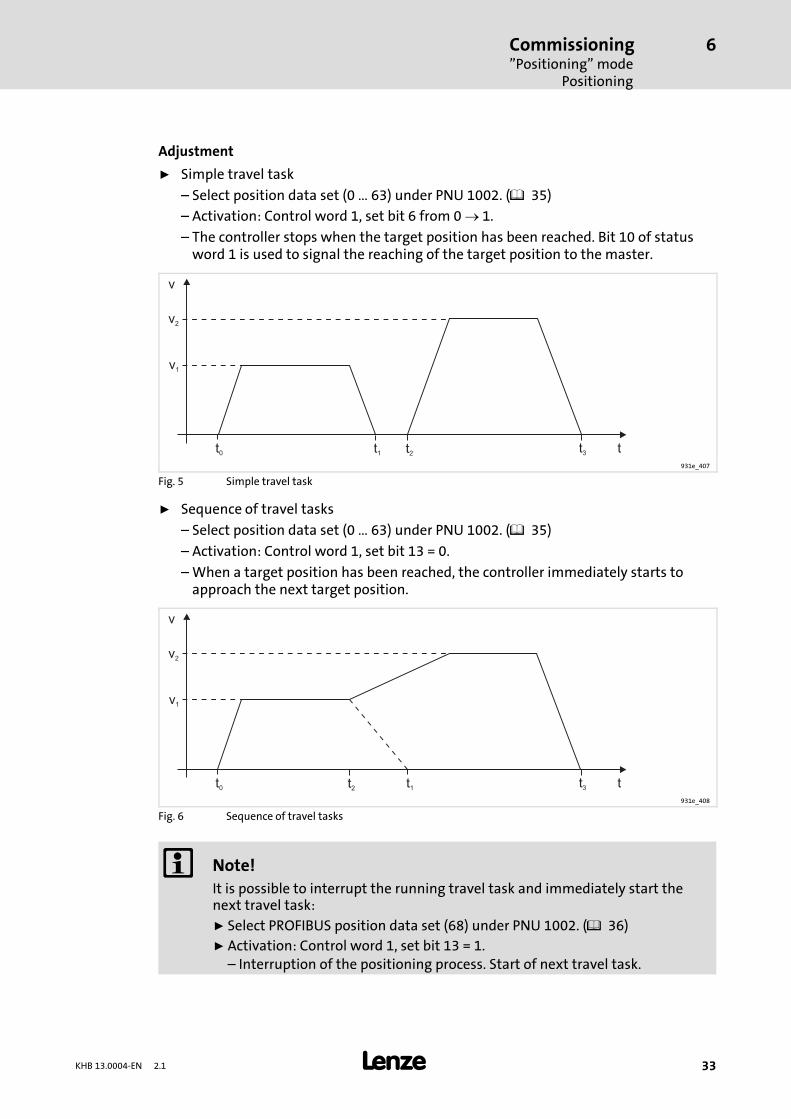
Adjustment
ƒ Simple travel task
– Select position data set (0 � 63) under PNU 1002. (� 35)
– Activation: Control word 1, set bit 6 from 0 � 1.
– The controller stops when the target position has been reached. Bit 10 of statusword 1 is used to signal the reaching of the target position to the master.
v1
v2
t0 t1 t2 t3 t
v
931e_407
Fig. 5 Simple travel task
ƒ Sequence of travel tasks
– Select position data set (0 � 63) under PNU 1002. (� 35)
– Activation: Control word 1, set bit 13 = 0.
– When a target position has been reached, the controller immediately starts toapproach the next target position.
v1
v2
t0 t1t2 t3 t
v
931e_408
Fig. 6 Sequence of travel tasks
� Note!It is possible to interrupt the running travel task and immediately start thenext travel task:
ƒ Select PROFIBUS position data set (68) under PNU 1002. (� 36)
ƒ Activation: Control word 1, set bit 13 = 1.– Interruption of the positioning process. Start of next travel task.
Commissioning"Positioning" modePositioning
6
� 34 KHB 13.0004−EN 2.1
Transfer of travel task
1
t
Bit 10
1
t
1
t
Bit 4
1
t
Bit 5
1
t
Bit 6
1
t
Bit 9
1
t
Bit 10
1
t
Bit 11
Sta
tus
wo
rd1
Co
ntr
olw
ord
1
(1) (2)
(3)
(4)
(5)
(6)
(0)
931e_031
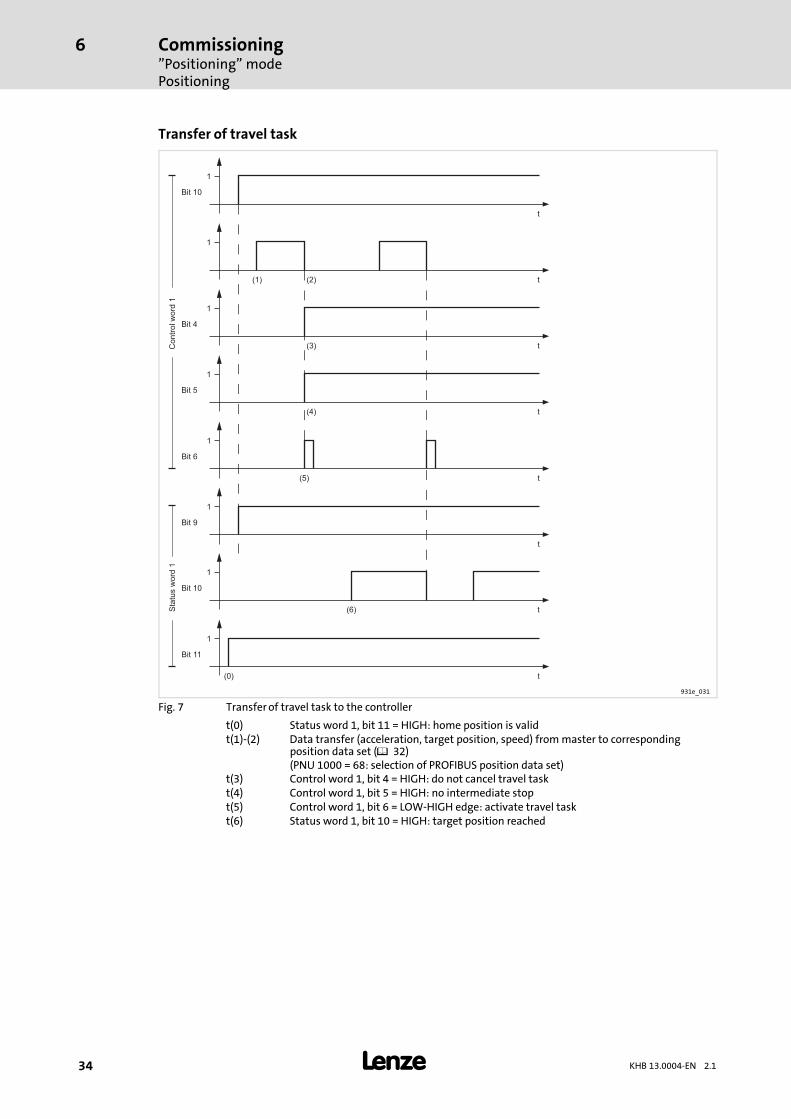
Fig. 7 Transfer of travel task to the controller
t(0) Status word 1, bit 11 = HIGH: home position is validt(1)−(2) Data transfer (acceleration, target position, speed) from master to corresponding
position data set (� 32)(PNU 1000 = 68: selection of PROFIBUS position data set)
t(3) Control word 1, bit 4 = HIGH: do not cancel travel taskt(4) Control word 1, bit 5 = HIGH: no intermediate stopt(5) Control word 1, bit 6 = LOW−HIGH edge: activate travel taskt(6) Status word 1, bit 10 = HIGH: target position reached
Commissioning"Positioning" mode
Static position data sets
6
� 35KHB 13.0004−EN 2.1
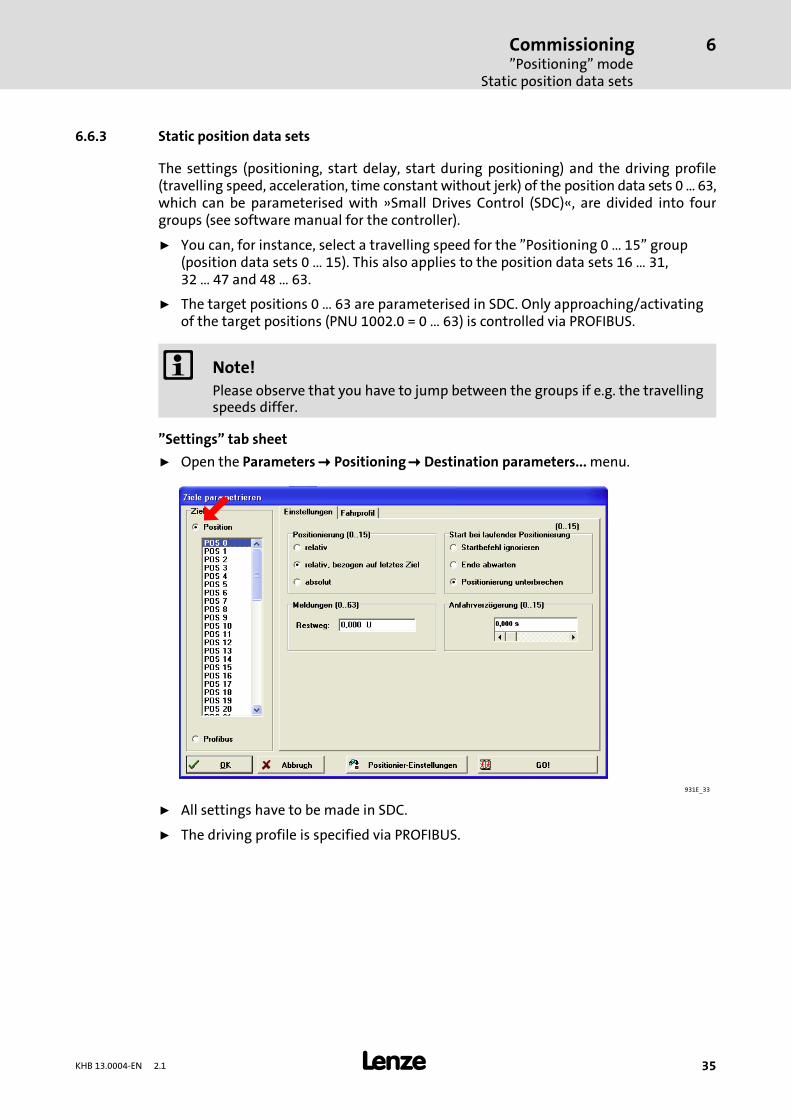
6.6.3 Static position data sets
The settings (positioning, start delay, start during positioning) and the driving profile(travelling speed, acceleration, time constant without jerk) of the position data sets 0 ... 63,which can be parameterised with »Small Drives Control (SDC)«, are divided into fourgroups (see software manual for the controller).
ƒ You can, for instance, select a travelling speed for the "Positioning 0 � 15" group(position data sets 0 � 15). This also applies to the position data sets 16 � 31,32 � 47 and 48 � 63.
ƒ The target positions 0 � 63 are parameterised in SDC. Only approaching/activatingof the target positions (PNU 1002.0 = 0 � 63) is controlled via PROFIBUS.
� Note!Please observe that you have to jump between the groups if e.g. the travellingspeeds differ.
"Settings" tab sheet
ƒ Open the Parameters Positioning Destination parameters... menu.
931E_33
ƒ All settings have to be made in SDC.
ƒ The driving profile is specified via PROFIBUS.
Commissioning"Positioning" modeDynamic position data set
6
� 36 KHB 13.0004−EN 2.1
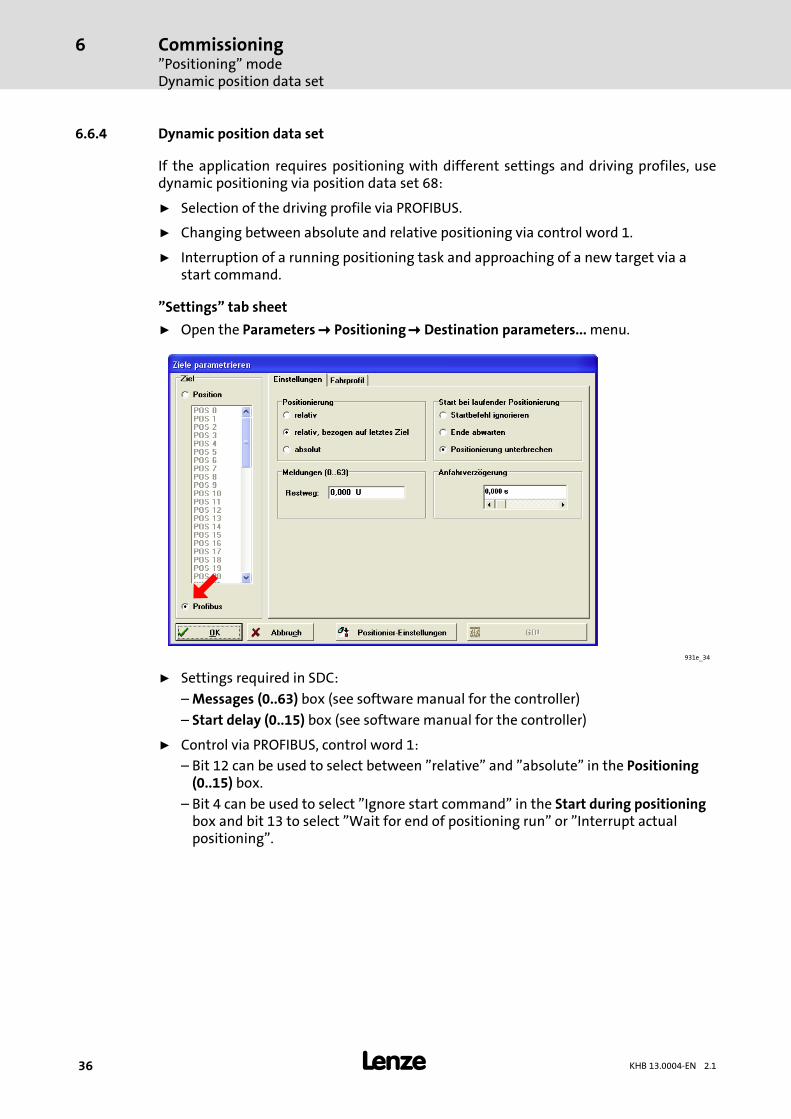
6.6.4 Dynamic position data set
If the application requires positioning with different settings and driving profiles, usedynamic positioning via position data set 68:
ƒ Selection of the driving profile via PROFIBUS.
ƒ Changing between absolute and relative positioning via control word 1.
ƒ Interruption of a running positioning task and approaching of a new target via astart command.
"Settings" tab sheet
ƒ Open the Parameters Positioning Destination parameters... menu.
931e_34
ƒ Settings required in SDC:
– Messages (0..63) box (see software manual for the controller)
– Start delay (0..15) box (see software manual for the controller)
ƒ Control via PROFIBUS, control word 1:
– Bit 12 can be used to select between "relative" and "absolute" in the Positioning(0..15) box.
– Bit 4 can be used to select "Ignore start command" in the Start during positioningbox and bit 13 to select "Wait for end of positioning run" or "Interrupt actualpositioning".
Commissioning"Positioning" mode
Commissioning with PROFIdrive
6
� 37KHB 13.0004−EN 2.1
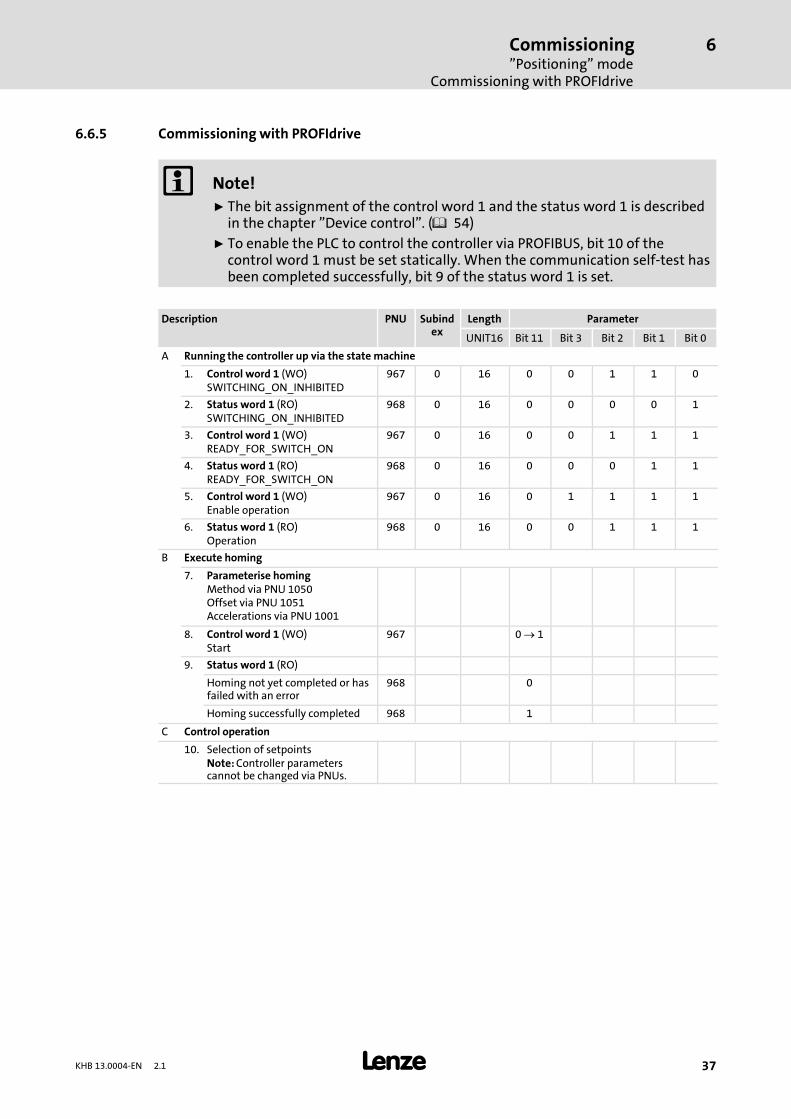
6.6.5 Commissioning with PROFIdrive
� Note!ƒ The bit assignment of the control word 1 and the status word 1 is described
in the chapter "Device control". (� 54)
ƒ To enable the PLC to control the controller via PROFIBUS, bit 10 of thecontrol word 1 must be set statically. When the communication self−test hasbeen completed successfully, bit 9 of the status word 1 is set.
Description PNU Subindex
Length Parameter
UNIT16 Bit 11 Bit 3 Bit 2 Bit 1 Bit 0
A Running the controller up via the state machine
1. Control word 1 (WO)SWITCHING_ON_INHIBITED
967 0 16 0 0 1 1 0
2. Status word 1 (RO)SWITCHING_ON_INHIBITED
968 0 16 0 0 0 0 1
3. Control word 1 (WO)READY_FOR_SWITCH_ON
967 0 16 0 0 1 1 1
4. Status word 1 (RO)READY_FOR_SWITCH_ON
968 0 16 0 0 0 1 1
5. Control word 1 (WO)Enable operation
967 0 16 0 1 1 1 1
6. Status word 1 (RO)Operation
968 0 16 0 0 1 1 1
B Execute homing
7. Parameterise homingMethod via PNU 1050Offset via PNU 1051Accelerations via PNU 1001
8. Control word 1 (WO)Start
967 0 � 1
9. Status word 1 (RO)
Homing not yet completed or hasfailed with an error
968 0
Homing successfully completed 968 1
C Control operation
10. Selection of setpointsNote: Controller parameterscannot be changed via PNUs.
Commissioning"Positioning" modePNUs for parameter setting
6
� 38 KHB 13.0004−EN 2.1
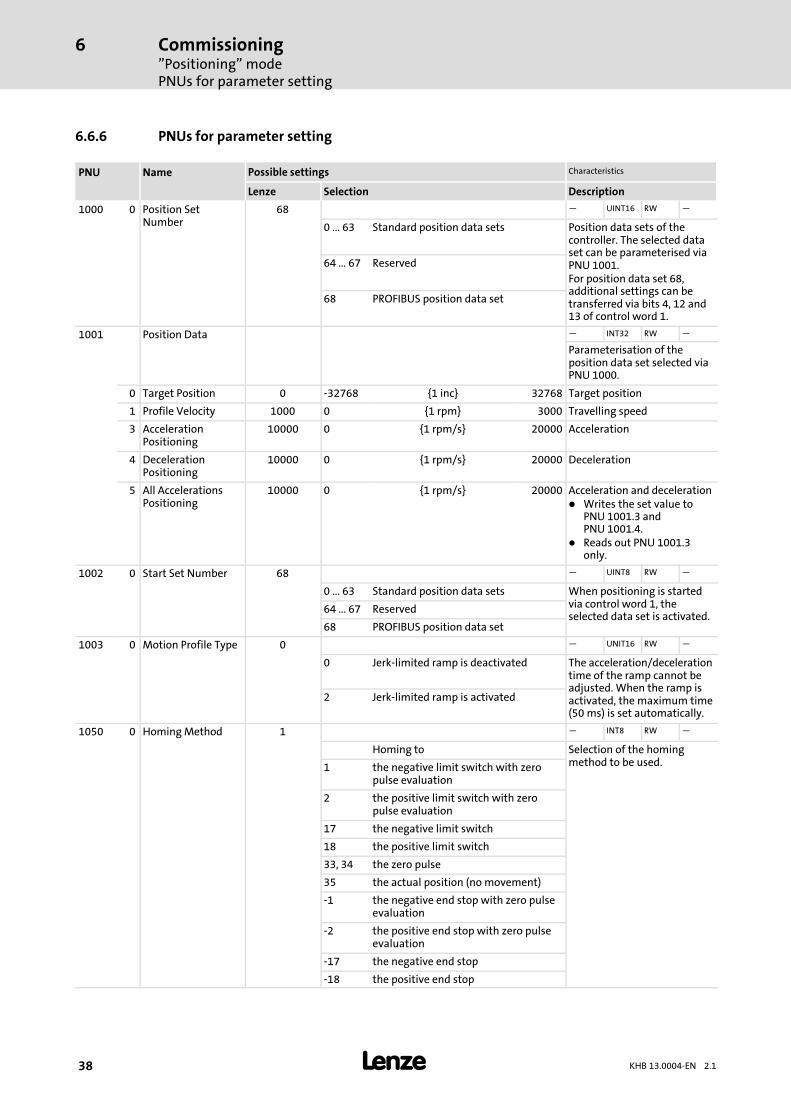
6.6.6 PNUs for parameter setting
PNU Name Possible settings Characteristics
Lenze Selection Description
1000 0 Position SetNumber
68 � UINT16 RW �
0 ... 63 Standard position data sets Position data sets of thecontroller. The selected dataset can be parameterised viaPNU 1001.For position data set 68,additional settings can betransferred via bits 4, 12 and13 of control word 1.
64 ... 67 Reserved
68 PROFIBUS position data set
1001 Position Data � INT32 RW �
Parameterisation of theposition data set selected viaPNU 1000.
0 Target Position 0 −32768 {1 inc} 32768 Target position
1 Profile Velocity 1000 0 {1 rpm} 3000 Travelling speed
3 AccelerationPositioning
10000 0 {1 rpm/s} 20000 Acceleration
4 DecelerationPositioning
10000 0 {1 rpm/s} 20000 Deceleration
5 All AccelerationsPositioning
10000 0 {1 rpm/s} 20000 Acceleration and deceleration� Writes the set value to
PNU 1001.3 andPNU 1001.4.
� Reads out PNU 1001.3only.
1002 0 Start Set Number 68 � UINT8 RW �
0 ... 63 Standard position data sets When positioning is startedvia control word 1, theselected data set is activated.
64 ... 67 Reserved
68 PROFIBUS position data set
1003 0 Motion Profile Type 0 � UNIT16 RW �
0 Jerk−limited ramp is deactivated The acceleration/decelerationtime of the ramp cannot beadjusted. When the ramp isactivated, the maximum time(50 ms) is set automatically.
2 Jerk−limited ramp is activated
1050 0 Homing Method 1 � INT8 RW �
Homing to Selection of the homingmethod to be used.1 the negative limit switch with zero
pulse evaluation
2 the positive limit switch with zeropulse evaluation
17 the negative limit switch
18 the positive limit switch
33, 34 the zero pulse
35 the actual position (no movement)
−1 the negative end stop with zero pulseevaluation
−2 the positive end stop with zero pulseevaluation
−17 the negative end stop
−18 the positive end stop
Commissioning"Positioning" mode
PNUs for parameter setting
6
� 39KHB 13.0004−EN 2.1
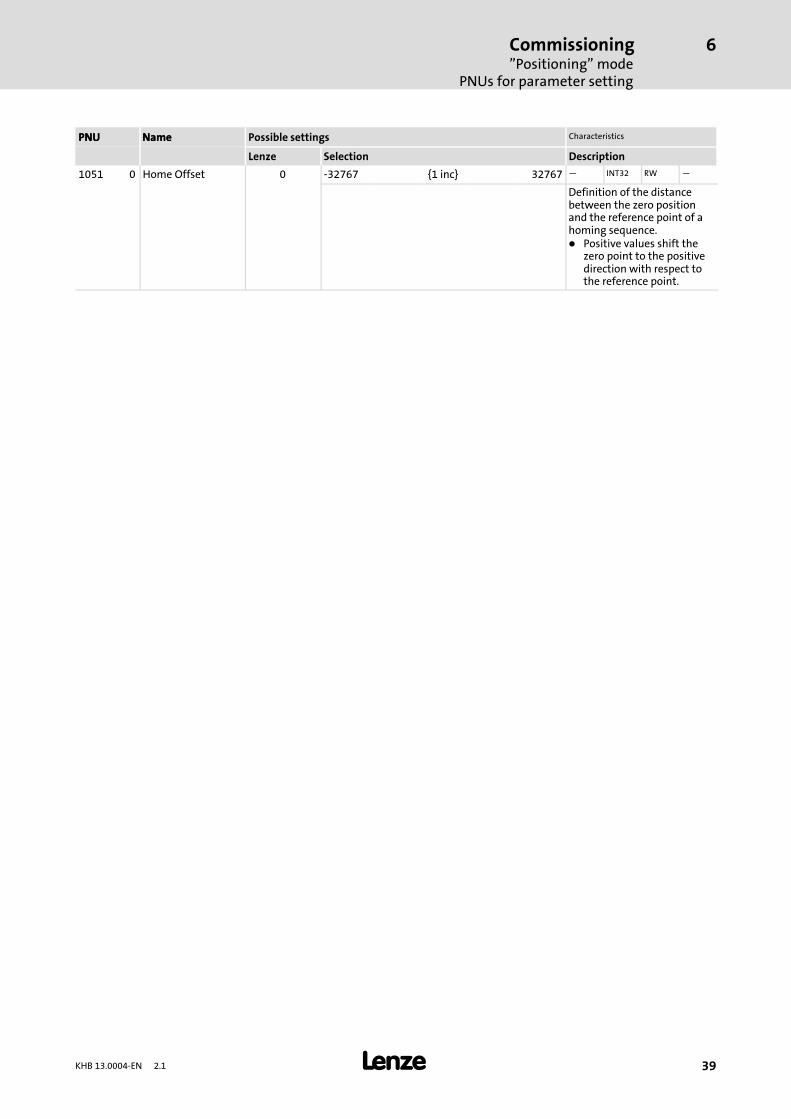
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
1051 0 Home Offset 0 −32767 {1 inc} 32767 � INT32 RW �
Definition of the distancebetween the zero positionand the reference point of ahoming sequence.� Positive values shift the
zero point to the positivedirection with respect tothe reference point.
CommissioningActual valuesActual position
6
� 40 KHB 13.0004−EN 2.1
6.7 Actual values
6.7.1 Actual position
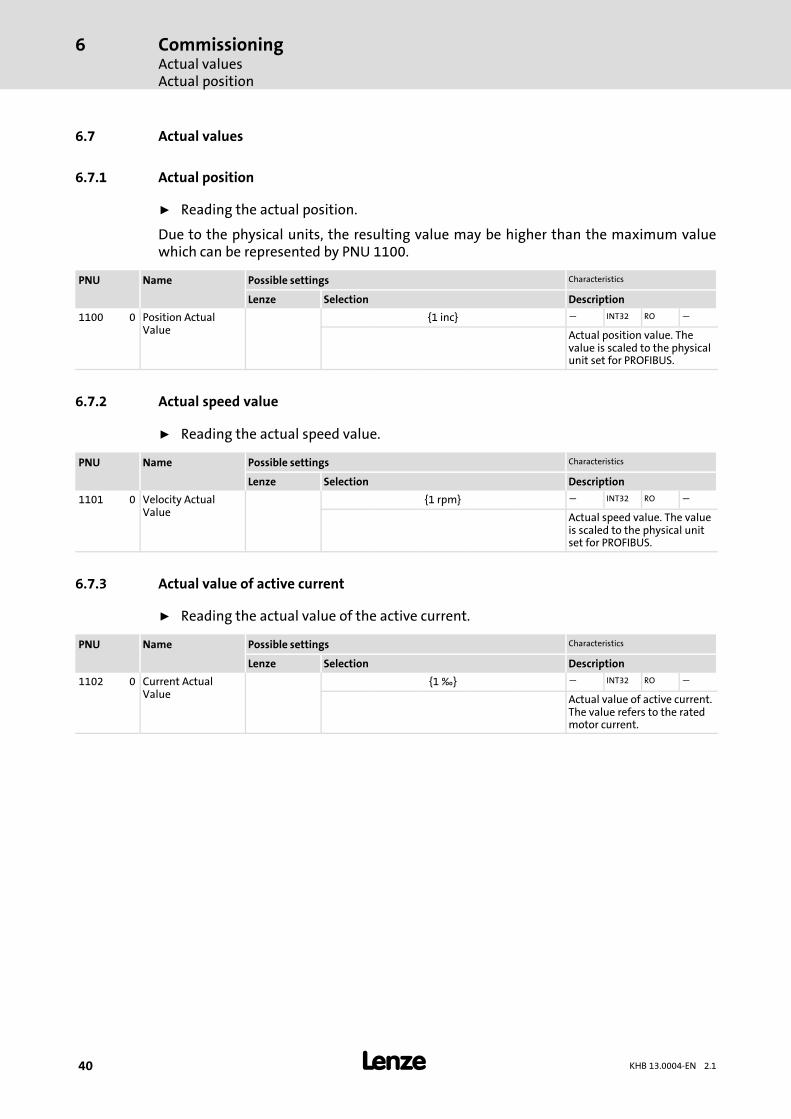
ƒ Reading the actual position.
Due to the physical units, the resulting value may be higher than the maximum valuewhich can be represented by PNU 1100.
PNU Name Possible settings Characteristics
Lenze Selection Description
1100 0 Position ActualValue
{1 inc} � INT32 RO �
Actual position value. Thevalue is scaled to the physicalunit set for PROFIBUS.
6.7.2 Actual speed value
ƒ Reading the actual speed value.
PNU Name Possible settings Characteristics
Lenze Selection Description
1101 0 Velocity ActualValue
{1 rpm} � INT32 RO �
Actual speed value. The valueis scaled to the physical unitset for PROFIBUS.
6.7.3 Actual value of active current
ƒ Reading the actual value of the active current.
PNU Name Possible settings Characteristics
Lenze Selection Description
1102 0 Current ActualValue
{1 �} � INT32 RO �
Actual value of active current.The value refers to the ratedmotor current.

CommissioningActual values
Digital outputs
6
� 41KHB 13.0004−EN 2.1
6.7.4 Digital outputs
ƒ States of the digital outputs.
PNU Name Possible settings Characteristics
Lenze Selection Description
1140 0 Digital Outputs 0 � UINT32 RW �
Bit Value Triggering of the digitaloutputs.Important! Up to 10 ms maypass between triggering andswitching of the output.The state of an output can bechecked by reading out theparameter.
0 00000001h Holding brake(read only)
1 ... 15 Reserved
16 00010000h Ready foroperation (readonly)
17, 18 00060000h DOUT1, DOUT2(read and write)
19 ... 32 Reserved
6.7.5 Digital inputs
ƒ Reading the states of the digital inputs.
PNU Name Possible settings Characteristics
Lenze Selection Description
1141 0 Digital Inputs 0 � UINT32 RO �
Bit Value Actual states of the digitalinputs.The available digital inputsdepend on theparameterisation of thecontroller
0 00000001h Negative limitswitch (DIN7)
1 Reserved
2 00000002h Positive limitswitch (DIN7)
3 00000008h Controller enableis missing (DIN9)
16 ... 25 03FF0000h DIN0 ... DIN9
26 ... 32 Reserved
CommissioningActual valuesMotor data
6
� 42 KHB 13.0004−EN 2.1
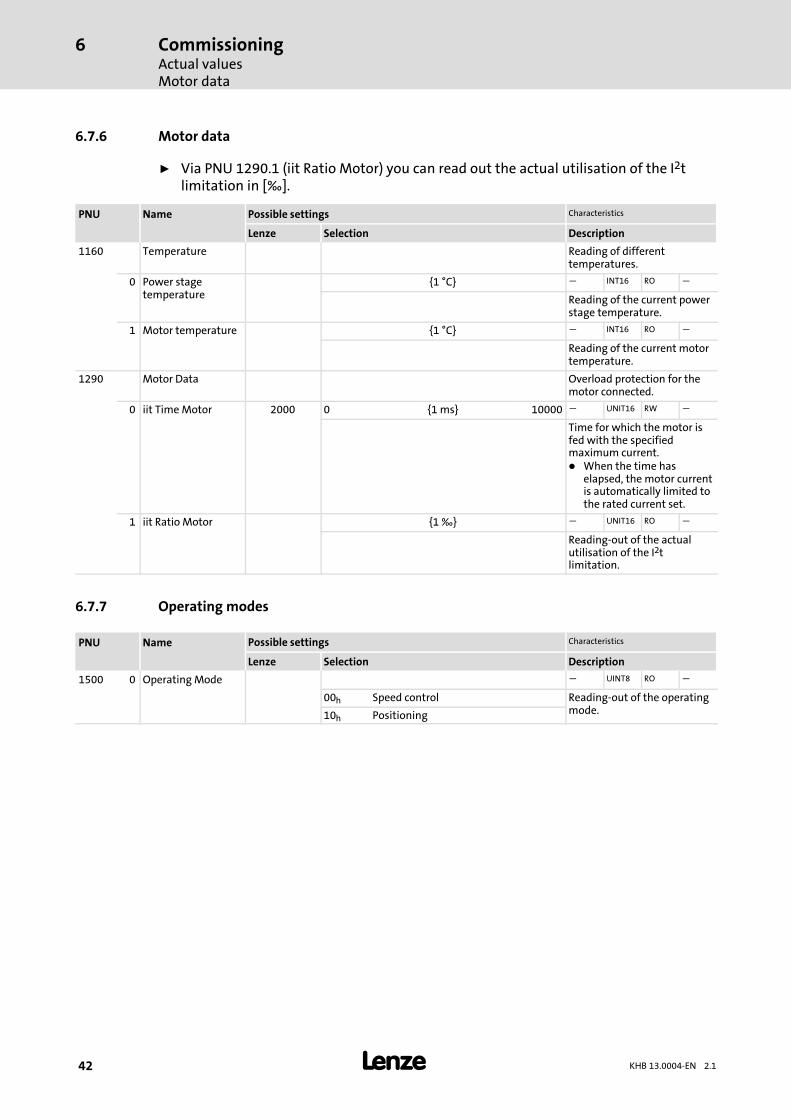
6.7.6 Motor data
ƒ Via PNU 1290.1 (iit Ratio Motor) you can read out the actual utilisation of the I2tlimitation in [�].
PNU Name Possible settings Characteristics
Lenze Selection Description
1160 Temperature Reading of differenttemperatures.
0 Power stagetemperature
{1 °C} � INT16 RO �
Reading of the current powerstage temperature.
1 Motor temperature {1 °C} � INT16 RO �
Reading of the current motortemperature.
1290 Motor Data Overload protection for themotor connected.
0 iit Time Motor 2000 0 {1 ms} 10000 � UNIT16 RW �
Time for which the motor isfed with the specifiedmaximum current.� When the time has
elapsed, the motor currentis automatically limited tothe rated current set.
1 iit Ratio Motor {1 �} � UNIT16 RO �
Reading−out of the actualutilisation of the I2tlimitation.
6.7.7 Operating modes
PNU Name Possible settings Characteristics
Lenze Selection Description
1500 0 Operating Mode � UINT8 RO �
00h Speed control Reading−out of the operatingmode.10h Positioning

Parameter settingPhysical units
7
� 43KHB 13.0004−EN 2.1
7 Parameter setting
7.1 Physical units
� Note!Application−specific parameters depend on the physical units. For this reasonset the physical units before starting to parameterise the application.
With the »Small Drives Control (SDC)« program you can parameterise the controller in sucha way that the physical quantities can be entered/read out on the drive directly in thedesired units (e.g. position values of a linear axis in millimetres and speeds in millimetresper second).
ƒ Open the Parameters Fieldbus Profibus... Display units... menu.
931E_026
Quantity Designation Unit Explanation
Length position_units Increments 65535 increments per revolution
Speed speed_units rpm Revolutions per minute
Acceleration acceleration_units rpm/s Speed increase per second
Parameter settingPhysical units
7
� 44 KHB 13.0004−EN 2.1
UE
UA
x1
x2
931e_415
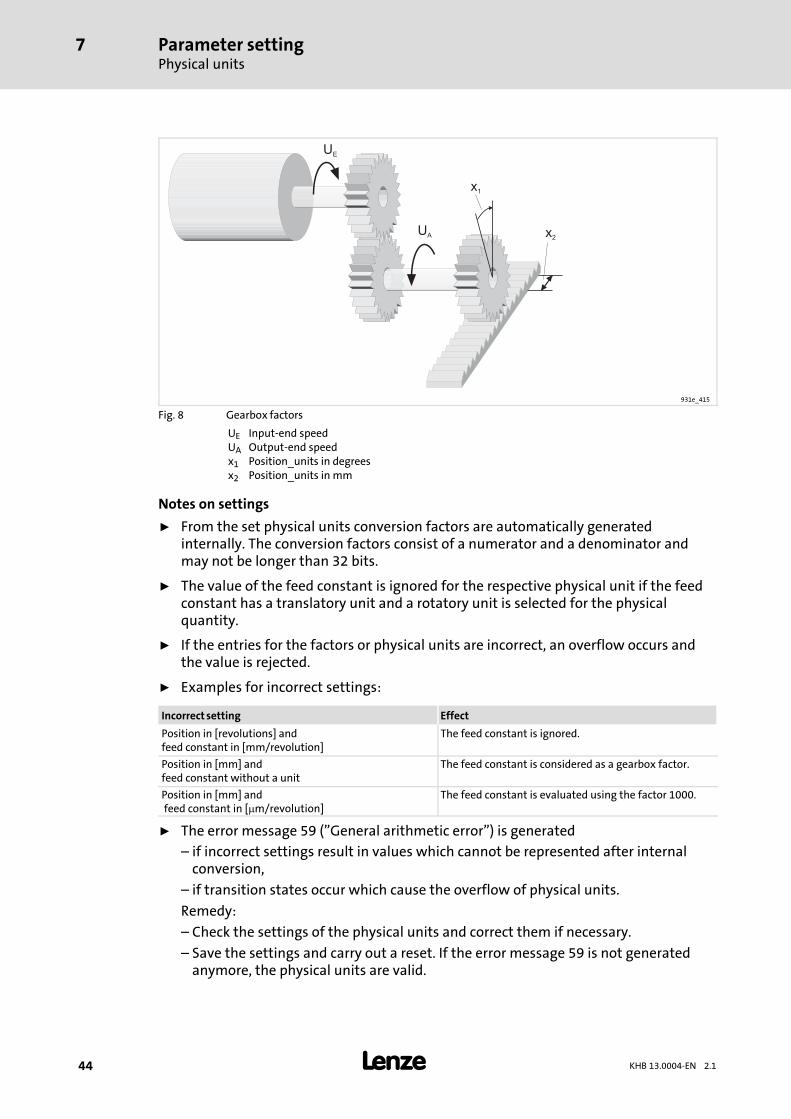
Fig. 8 Gearbox factors
UE Input−end speedUA Output−end speedx1 Position_units in degreesx2 Position_units in mm
Notes on settings
ƒ From the set physical units conversion factors are automatically generatedinternally. The conversion factors consist of a numerator and a denominator andmay not be longer than 32 bits.
ƒ The value of the feed constant is ignored for the respective physical unit if the feedconstant has a translatory unit and a rotatory unit is selected for the physicalquantity.
ƒ If the entries for the factors or physical units are incorrect, an overflow occurs andthe value is rejected.
ƒ Examples for incorrect settings:
Incorrect setting Effect
Position in [revolutions] andfeed constant in [mm/revolution]
The feed constant is ignored.
Position in [mm] andfeed constant without a unit
The feed constant is considered as a gearbox factor.
Position in [mm] and feed constant in [�m/revolution]
The feed constant is evaluated using the factor 1000.
ƒ The error message 59 ("General arithmetic error") is generated
– if incorrect settings result in values which cannot be represented after internalconversion,
– if transition states occur which cause the overflow of physical units.
Remedy:
– Check the settings of the physical units and correct them if necessary.
– Save the settings and carry out a reset. If the error message 59 is not generatedanymore, the physical units are valid.
Parameter settingGlobal parameters
Saving of parameter set
7
� 45KHB 13.0004−EN 2.1
7.2 Global parameters
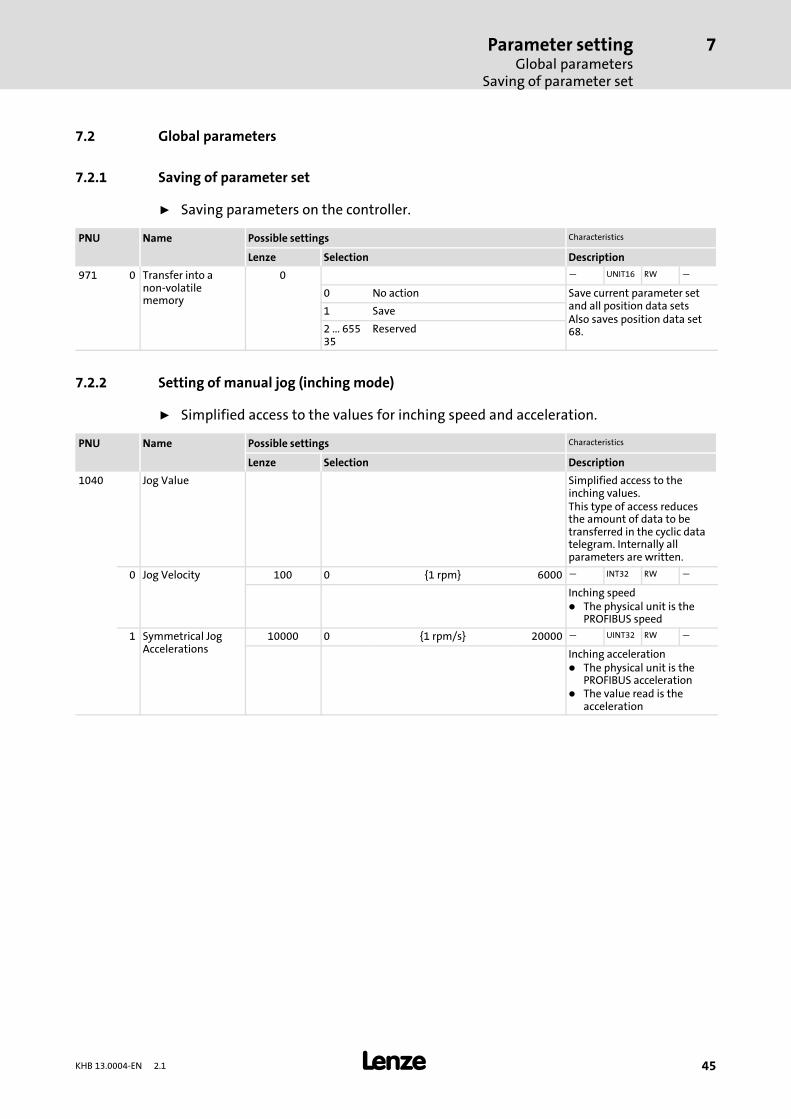
7.2.1 Saving of parameter set
ƒ Saving parameters on the controller.
PNU Name Possible settings Characteristics
Lenze Selection Description
971 0 Transfer into anon−volatilememory
0 � UNIT16 RW �
0 No action Save current parameter setand all position data setsAlso saves position data set68.
1 Save
2 ... 65535
Reserved
7.2.2 Setting of manual jog (inching mode)
ƒ Simplified access to the values for inching speed and acceleration.
PNU Name Possible settings Characteristics
Lenze Selection Description
1040 Jog Value Simplified access to theinching values.This type of access reducesthe amount of data to betransferred in the cyclic datatelegram. Internally allparameters are written.
0 Jog Velocity 100 0 {1 rpm} 6000 � INT32 RW �
Inching speed� The physical unit is the
PROFIBUS speed
1 Symmetrical JogAccelerations
10000 0 {1 rpm/s} 20000 � UINT32 RW �
Inching acceleration� The physical unit is the
PROFIBUS acceleration� The value read is the
acceleration
Parameter settingGlobal parametersMotor data
7
� 46 KHB 13.0004−EN 2.1
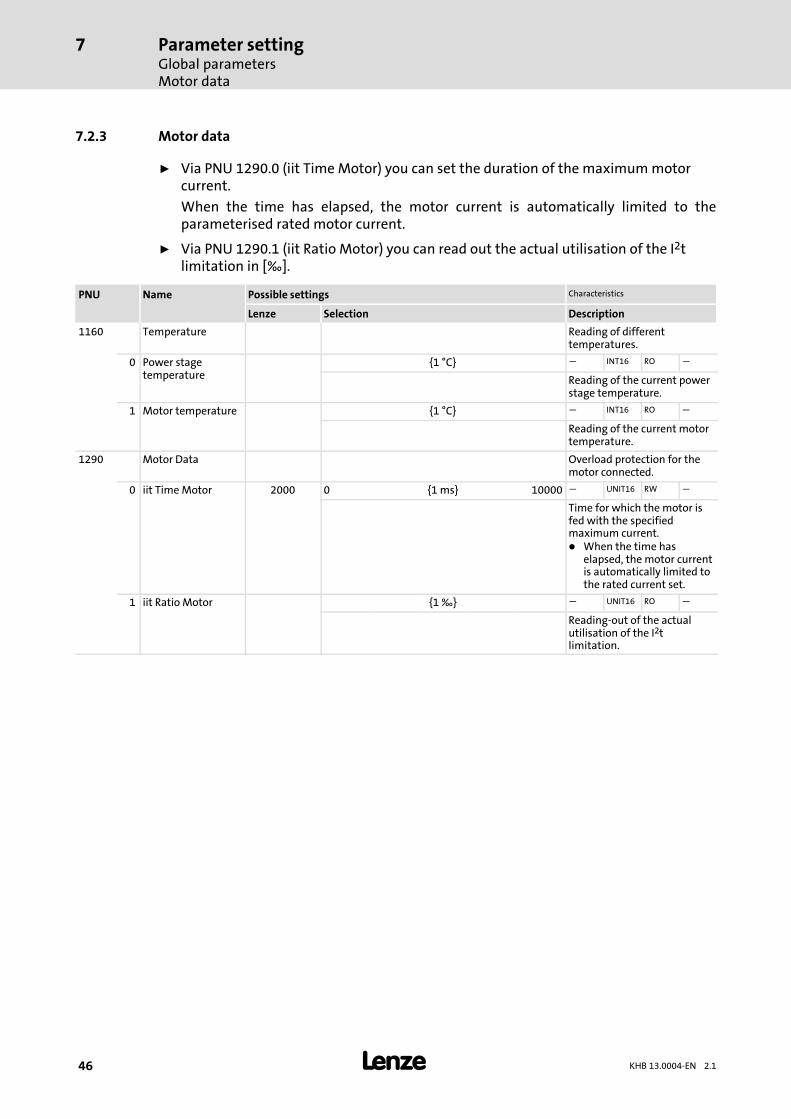
7.2.3 Motor data
ƒ Via PNU 1290.0 (iit Time Motor) you can set the duration of the maximum motorcurrent.
When the time has elapsed, the motor current is automatically limited to theparameterised rated motor current.
ƒ Via PNU 1290.1 (iit Ratio Motor) you can read out the actual utilisation of the I2tlimitation in [�].
PNU Name Possible settings Characteristics
Lenze Selection Description
1160 Temperature Reading of differenttemperatures.
0 Power stagetemperature
{1 °C} � INT16 RO �
Reading of the current powerstage temperature.
1 Motor temperature {1 °C} � INT16 RO �
Reading of the current motortemperature.
1290 Motor Data Overload protection for themotor connected.
0 iit Time Motor 2000 0 {1 ms} 10000 � UNIT16 RW �
Time for which the motor isfed with the specifiedmaximum current.� When the time has
elapsed, the motor currentis automatically limited tothe rated current set.
1 iit Ratio Motor {1 �} � UNIT16 RO �
Reading−out of the actualutilisation of the I2tlimitation.
Parameter setting"Speed control" mode
Speed setpoint
7
� 47KHB 13.0004−EN 2.1
7.3 "Speed control" mode
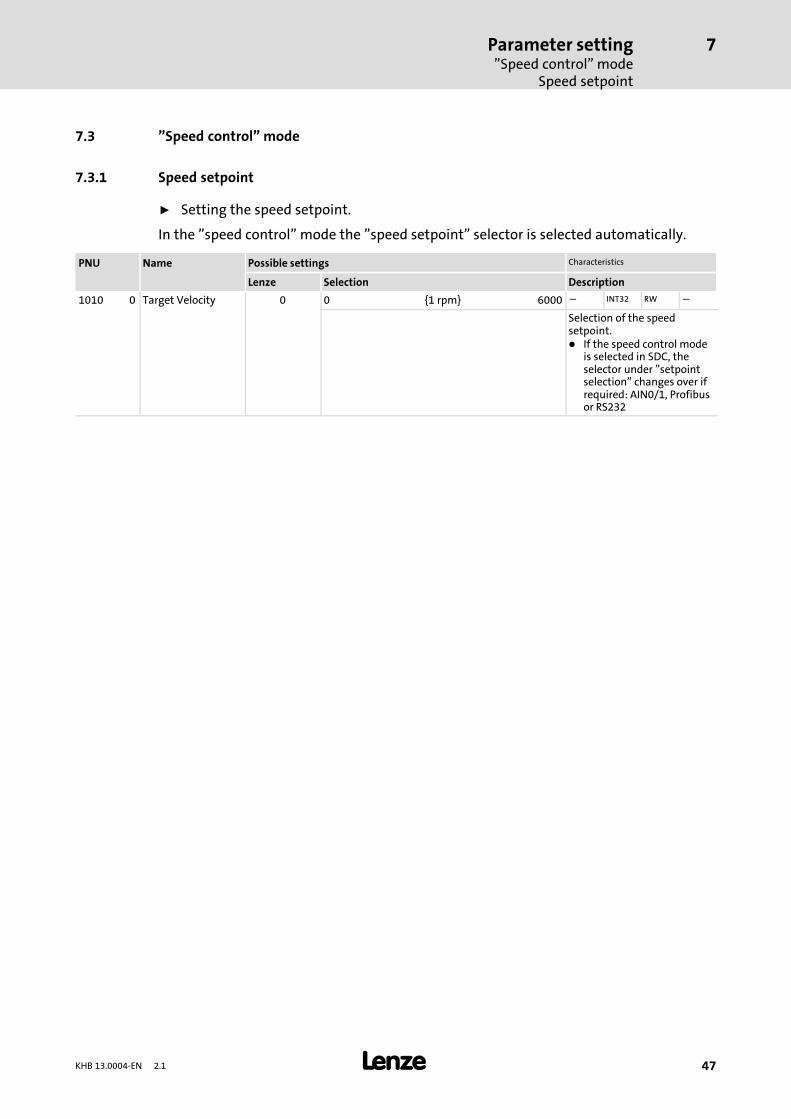
7.3.1 Speed setpoint
ƒ Setting the speed setpoint.
In the "speed control" mode the "speed setpoint" selector is selected automatically.
PNU Name Possible settings Characteristics
Lenze Selection Description
1010 0 Target Velocity 0 0 {1 rpm} 6000 � INT32 RW �
Selection of the speedsetpoint.� If the speed control mode
is selected in SDC, theselector under "setpointselection" changes over ifrequired: AIN0/1, Profibusor RS232
Parameter setting"Speed control" modeAcceleration value
7
� 48 KHB 13.0004−EN 2.1
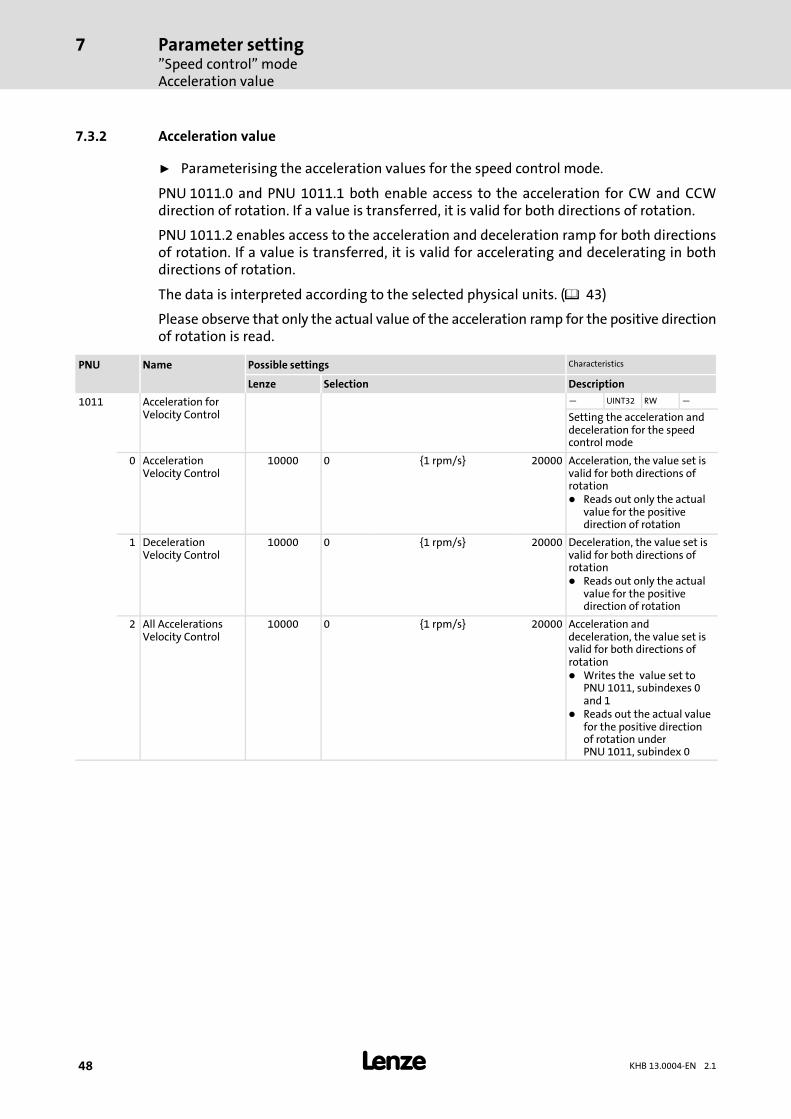
7.3.2 Acceleration value
ƒ Parameterising the acceleration values for the speed control mode.
PNU 1011.0 and PNU 1011.1 both enable access to the acceleration for CW and CCWdirection of rotation. If a value is transferred, it is valid for both directions of rotation.
PNU 1011.2 enables access to the acceleration and deceleration ramp for both directionsof rotation. If a value is transferred, it is valid for accelerating and decelerating in bothdirections of rotation.
The data is interpreted according to the selected physical units. (� 43)
Please observe that only the actual value of the acceleration ramp for the positive directionof rotation is read.
PNU Name Possible settings Characteristics
Lenze Selection Description
1011 Acceleration forVelocity Control
� UINT32 RW �
Setting the acceleration anddeceleration for the speedcontrol mode
0 AccelerationVelocity Control
10000 0 {1 rpm/s} 20000 Acceleration, the value set isvalid for both directions ofrotation� Reads out only the actual
value for the positivedirection of rotation
1 DecelerationVelocity Control
10000 0 {1 rpm/s} 20000 Deceleration, the value set isvalid for both directions ofrotation� Reads out only the actual
value for the positivedirection of rotation
2 All AccelerationsVelocity Control
10000 0 {1 rpm/s} 20000 Acceleration anddeceleration, the value set isvalid for both directions ofrotation� Writes the value set to
PNU 1011, subindexes 0and 1
� Reads out the actual valuefor the positive directionof rotation underPNU 1011, subindex 0
Parameter setting"Positioning" mode
Selection of position data set for parameter setting
7
� 49KHB 13.0004−EN 2.1
7.4 "Positioning" mode
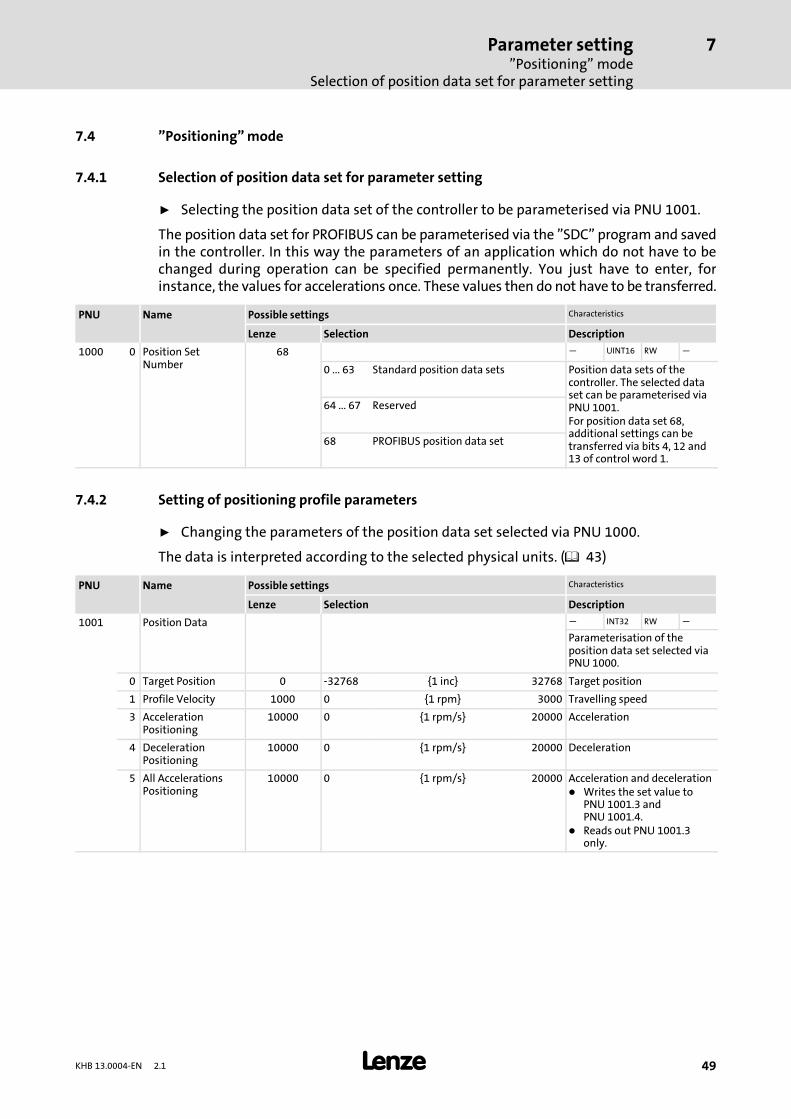
7.4.1 Selection of position data set for parameter setting
ƒ Selecting the position data set of the controller to be parameterised via PNU 1001.
The position data set for PROFIBUS can be parameterised via the "SDC" program and savedin the controller. In this way the parameters of an application which do not have to bechanged during operation can be specified permanently. You just have to enter, forinstance, the values for accelerations once. These values then do not have to be transferred.
PNU Name Possible settings Characteristics
Lenze Selection Description
1000 0 Position SetNumber
68 � UINT16 RW �
0 ... 63 Standard position data sets Position data sets of thecontroller. The selected dataset can be parameterised viaPNU 1001.For position data set 68,additional settings can betransferred via bits 4, 12 and13 of control word 1.
64 ... 67 Reserved
68 PROFIBUS position data set
7.4.2 Setting of positioning profile parameters
ƒ Changing the parameters of the position data set selected via PNU 1000.
The data is interpreted according to the selected physical units. (� 43)
PNU Name Possible settings Characteristics
Lenze Selection Description
1001 Position Data � INT32 RW �
Parameterisation of theposition data set selected viaPNU 1000.
0 Target Position 0 −32768 {1 inc} 32768 Target position
1 Profile Velocity 1000 0 {1 rpm} 3000 Travelling speed
3 AccelerationPositioning
10000 0 {1 rpm/s} 20000 Acceleration
4 DecelerationPositioning
10000 0 {1 rpm/s} 20000 Deceleration
5 All AccelerationsPositioning
10000 0 {1 rpm/s} 20000 Acceleration and deceleration� Writes the set value to
PNU 1001.3 andPNU 1001.4.
� Reads out PNU 1001.3only.
Parameter setting"Positioning" modePosition data set at starting of positioning
7
� 50 KHB 13.0004−EN 2.1
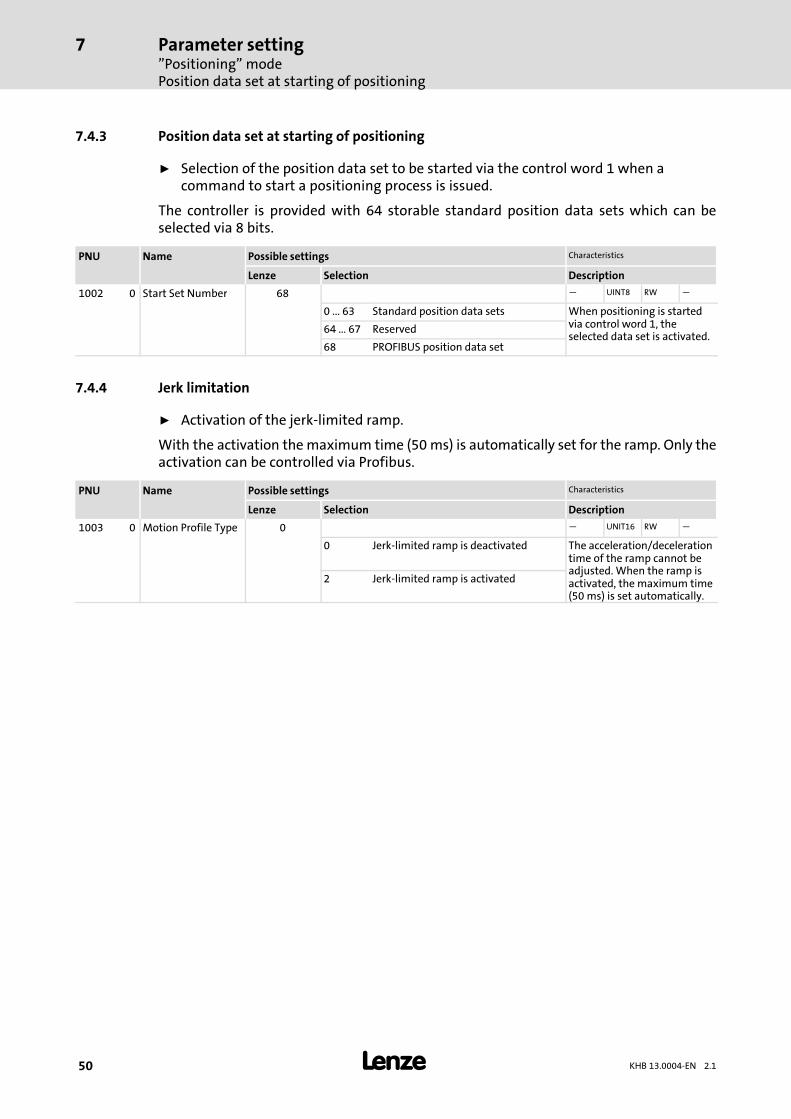
7.4.3 Position data set at starting of positioning
ƒ Selection of the position data set to be started via the control word 1 when acommand to start a positioning process is issued.
The controller is provided with 64 storable standard position data sets which can beselected via 8 bits.
PNU Name Possible settings Characteristics
Lenze Selection Description
1002 0 Start Set Number 68 � UINT8 RW �
0 ... 63 Standard position data sets When positioning is startedvia control word 1, theselected data set is activated.
64 ... 67 Reserved
68 PROFIBUS position data set
7.4.4 Jerk limitation
ƒ Activation of the jerk−limited ramp.
With the activation the maximum time (50 ms) is automatically set for the ramp. Only theactivation can be controlled via Profibus.
PNU Name Possible settings Characteristics
Lenze Selection Description
1003 0 Motion Profile Type 0 � UNIT16 RW �
0 Jerk−limited ramp is deactivated The acceleration/decelerationtime of the ramp cannot beadjusted. When the ramp isactivated, the maximum time(50 ms) is set automatically.
2 Jerk−limited ramp is activated

Parameter setting"Positioning" mode
Homing modes
7
� 51KHB 13.0004−EN 2.1
7.4.5 Homing modes
ƒ Selection of the homing method.
A detailed description of the different methods is given in the software manual for thecontroller.
PNU Name Possible settings Characteristics
Lenze Selection Description
1050 0 Homing Method 1 � INT8 RW �
Homing to Selection of the homingmethod to be used.1 the negative limit switch with zero
pulse evaluation
2 the positive limit switch with zeropulse evaluation
17 the negative limit switch
18 the positive limit switch
33, 34 the zero pulse
35 the actual position (no movement)
−1 the negative end stop with zero pulseevaluation
−2 the positive end stop with zero pulseevaluation
−17 the negative end stop
−18 the positive end stop
Parameter setting"Positioning" modeHoming offset
7
� 52 KHB 13.0004−EN 2.1
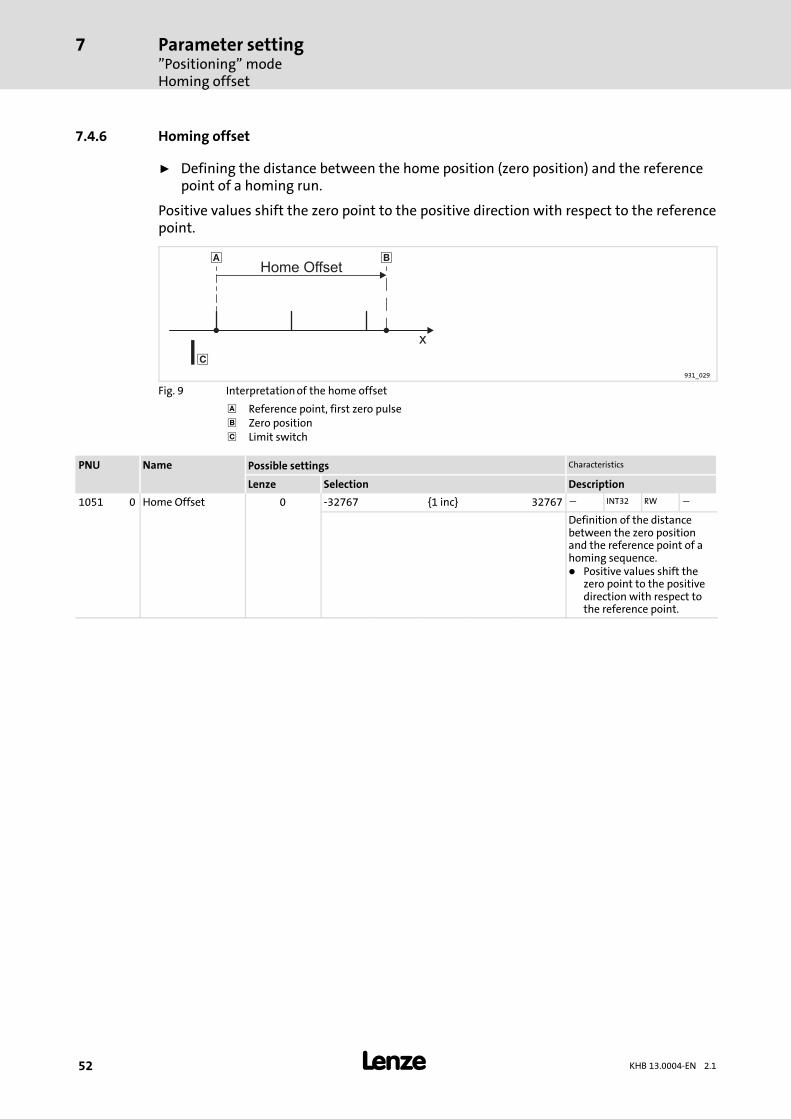
7.4.6 Homing offset
ƒ Defining the distance between the home position (zero position) and the referencepoint of a homing run.
Positive values shift the zero point to the positive direction with respect to the referencepoint.
x
� �
�
Home Offset
931_029
Fig. 9 Interpretation of the home offset
Reference point, first zero pulse� Zero position� Limit switch
PNU Name Possible settings Characteristics
Lenze Selection Description
1051 0 Home Offset 0 −32767 {1 inc} 32767 � INT32 RW �
Definition of the distancebetween the zero positionand the reference point of ahoming sequence.� Positive values shift the
zero point to the positivedirection with respect tothe reference point.

Parameter settingError management
Setting of responses
7
� 53KHB 13.0004−EN 2.1
7.5 Error management
7.5.1 Setting of responses
ƒ Selection of the error number for which a response is to be set.
A description of the error messages and the possible responses is given in the chapter"Table of error messages". (� 62)
PNU Name Possible settings Characteristics
Lenze Selection Description
1610 Error Management Error management
0 Error Number � UNIT8 RW �
1h {1} 40h Selection of the error numberfor which a response is to beset under PNU 1610.1.Overview of error numbers:� 62
1 Error Reaction Code � UNIT8 RW �
00h No response Response of the controller toan error event.Notes on settings: � 62
03h Warning
05h Emergency stop
08h Power stage off (motor coasts tostandstill)
Device controlImportant notes
8
� 54 KHB 13.0004−EN 2.1
8 Device control
8.1 Important notes
� Danger!
Uncontrolled motor movements can occur
If the power stage of the controller is inhibited, the motor coasts to stopwithout braking.
Possible consequences:
ƒ Injury to persons through uncontrolled machine movements.
Protective measures:
ƒ Install a mechanical motor brake which is activated automatically when thepower stage is inhibited.
The controller is controlled via PROFIdrive by means of a data word (LOW byte and HIGHbyte):
ƒ The master uses the control word 1 to control the essential function of thecontroller.
– The assignment of the control word 1 corresponds to the PROFIdrive profile. Somefunctions have manufacturer−specific definitions.
– The controller first accepts the parameter data and then evaluates the controlword 1. This ensures that the sequence of the positioning steps is correct.
– State changes triggered via the control word 1 first have to be confirmed via thestatus word 1 before another command can be sent via the control word 1.
ƒ The controller (slave) uses the status word 1 to signal its state to the master.
– The assignment of the status word 1 corresponds to the PROFIdrive profile. Somefunctions have manufacturer−specific definitions.
– The status word 1 displays the different states of the controller.
Device control"Speed control" mode
Control word 1
8
� 55KHB 13.0004−EN 2.1
8.2 "Speed control" mode
8.2.1 Control word 1
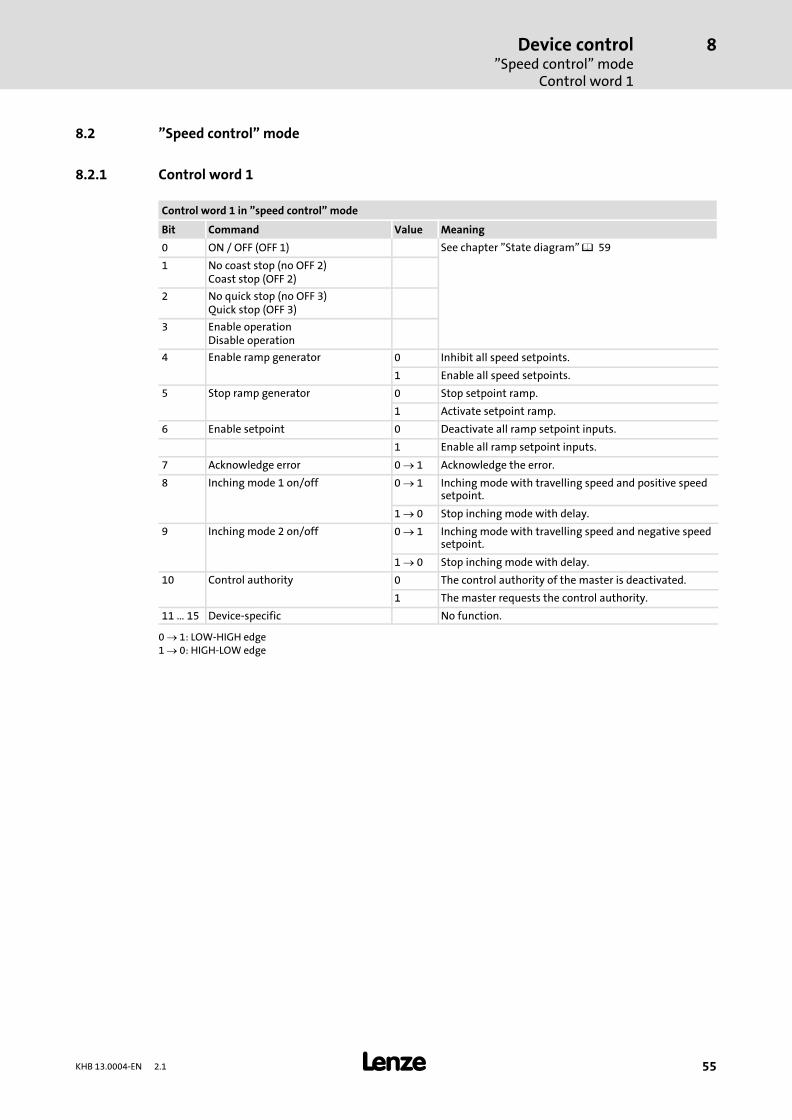
Control word 1 in "speed control" mode
Bit Command Value Meaning
0 ON / OFF (OFF 1) See chapter "State diagram" � 59
1 No coast stop (no OFF 2)Coast stop (OFF 2)
2 No quick stop (no OFF 3)Quick stop (OFF 3)
3 Enable operationDisable operation
4 Enable ramp generator 0 Inhibit all speed setpoints.
1 Enable all speed setpoints.
5 Stop ramp generator 0 Stop setpoint ramp.
1 Activate setpoint ramp.
6 Enable setpoint 0 Deactivate all ramp setpoint inputs.
1 Enable all ramp setpoint inputs.
7 Acknowledge error 0 � 1 Acknowledge the error.
8 Inching mode 1 on/off 0 � 1 Inching mode with travelling speed and positive speedsetpoint.
1 � 0 Stop inching mode with delay.
9 Inching mode 2 on/off 0 � 1 Inching mode with travelling speed and negative speedsetpoint.
1 � 0 Stop inching mode with delay.
10 Control authority 0 The control authority of the master is deactivated.
1 The master requests the control authority.
11 � 15 Device−specific No function.
0 � 1: LOW−HIGH edge1 � 0: HIGH−LOW edge
Device control"Speed control" modeStatus word 1
8
� 56 KHB 13.0004−EN 2.1
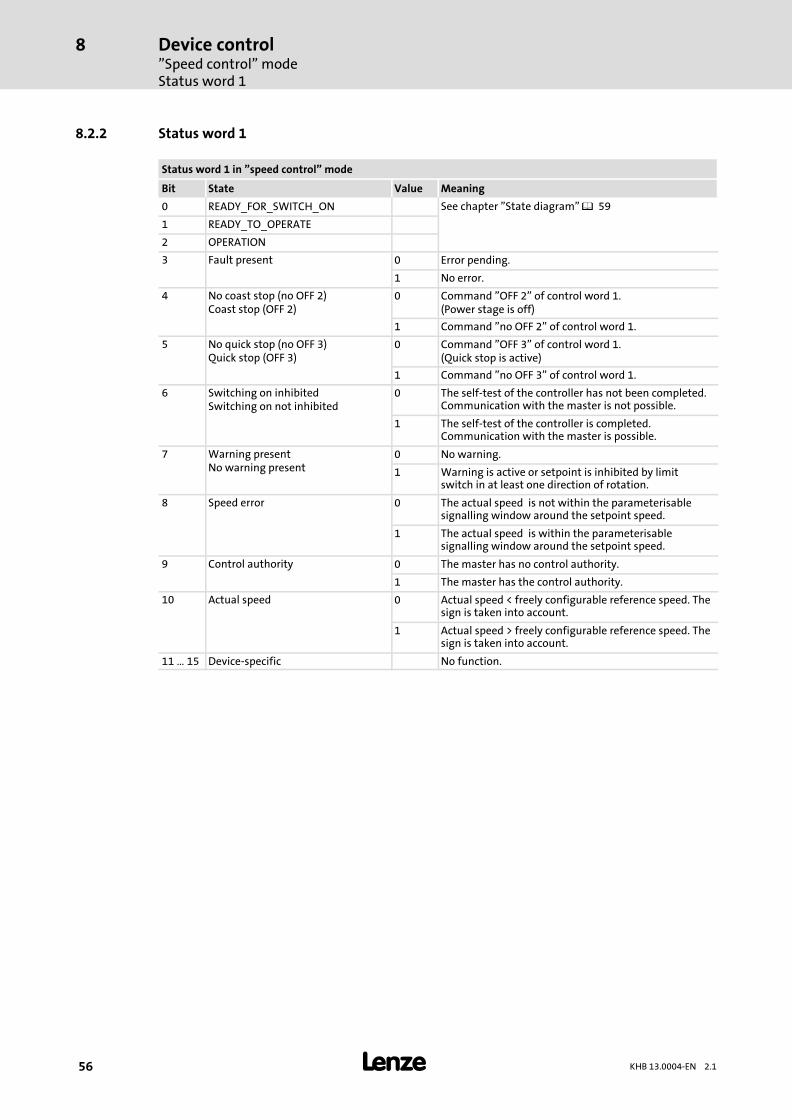
8.2.2 Status word 1
Status word 1 in "speed control" mode
Bit State Value Meaning
0 READY_FOR_SWITCH_ON See chapter "State diagram" � 59
1 READY_TO_OPERATE
2 OPERATION
3 Fault present 0 Error pending.
1 No error.
4 No coast stop (no OFF 2)Coast stop (OFF 2)
0 Command "OFF 2" of control word 1.(Power stage is off)
1 Command "no OFF 2" of control word 1.
5 No quick stop (no OFF 3)Quick stop (OFF 3)
0 Command "OFF 3" of control word 1.(Quick stop is active)
1 Command "no OFF 3" of control word 1.
6 Switching on inhibitedSwitching on not inhibited
0 The self−test of the controller has not been completed.Communication with the master is not possible.
1 The self−test of the controller is completed.Communication with the master is possible.
7 Warning presentNo warning present
0 No warning.
1 Warning is active or setpoint is inhibited by limitswitch in at least one direction of rotation.
8 Speed error 0 The actual speed is not within the parameterisablesignalling window around the setpoint speed.
1 The actual speed is within the parameterisablesignalling window around the setpoint speed.
9 Control authority 0 The master has no control authority.
1 The master has the control authority.
10 Actual speed 0 Actual speed < freely configurable reference speed. Thesign is taken into account.
1 Actual speed > freely configurable reference speed. Thesign is taken into account.
11 � 15 Device−specific No function.
Device control"Positioning" mode
Control word 1
8
� 57KHB 13.0004−EN 2.1
8.3 "Positioning" mode
8.3.1 Control word 1
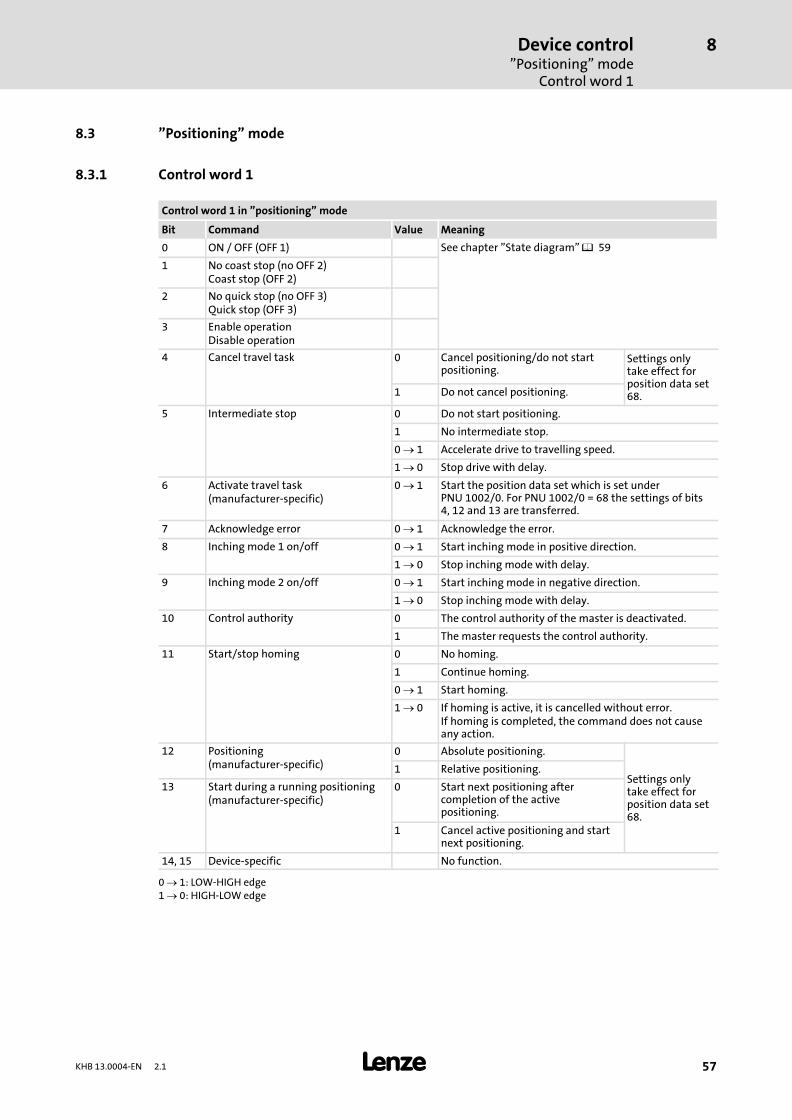
Control word 1 in "positioning" mode
Bit Command Value Meaning
0 ON / OFF (OFF 1) See chapter "State diagram" � 59
1 No coast stop (no OFF 2)Coast stop (OFF 2)
2 No quick stop (no OFF 3)Quick stop (OFF 3)
3 Enable operationDisable operation
4 Cancel travel task 0 Cancel positioning/do not startpositioning.
Settings onlytake effect forposition data set68.1 Do not cancel positioning.
5 Intermediate stop 0 Do not start positioning.
1 No intermediate stop.
0 � 1 Accelerate drive to travelling speed.
1 � 0 Stop drive with delay.
6 Activate travel task(manufacturer−specific)
0 � 1 Start the position data set which is set underPNU 1002/0. For PNU 1002/0 = 68 the settings of bits4, 12 and 13 are transferred.
7 Acknowledge error 0 � 1 Acknowledge the error.
8 Inching mode 1 on/off 0 � 1 Start inching mode in positive direction.
1 � 0 Stop inching mode with delay.
9 Inching mode 2 on/off 0 � 1 Start inching mode in negative direction.
1 � 0 Stop inching mode with delay.
10 Control authority 0 The control authority of the master is deactivated.
1 The master requests the control authority.
11 Start/stop homing 0 No homing.
1 Continue homing.
0 � 1 Start homing.
1 � 0 If homing is active, it is cancelled without error.If homing is completed, the command does not causeany action.
12 Positioning(manufacturer−specific)
0 Absolute positioning.
Settings onlytake effect forposition data set68.
1 Relative positioning.
13 Start during a running positioning(manufacturer−specific)
0 Start next positioning aftercompletion of the activepositioning.
1 Cancel active positioning and startnext positioning.
14, 15 Device−specific No function.
0 � 1: LOW−HIGH edge1 � 0: HIGH−LOW edge
Device control"Positioning" modeStatus word 1
8
� 58 KHB 13.0004−EN 2.1
8.3.2 Status word 1
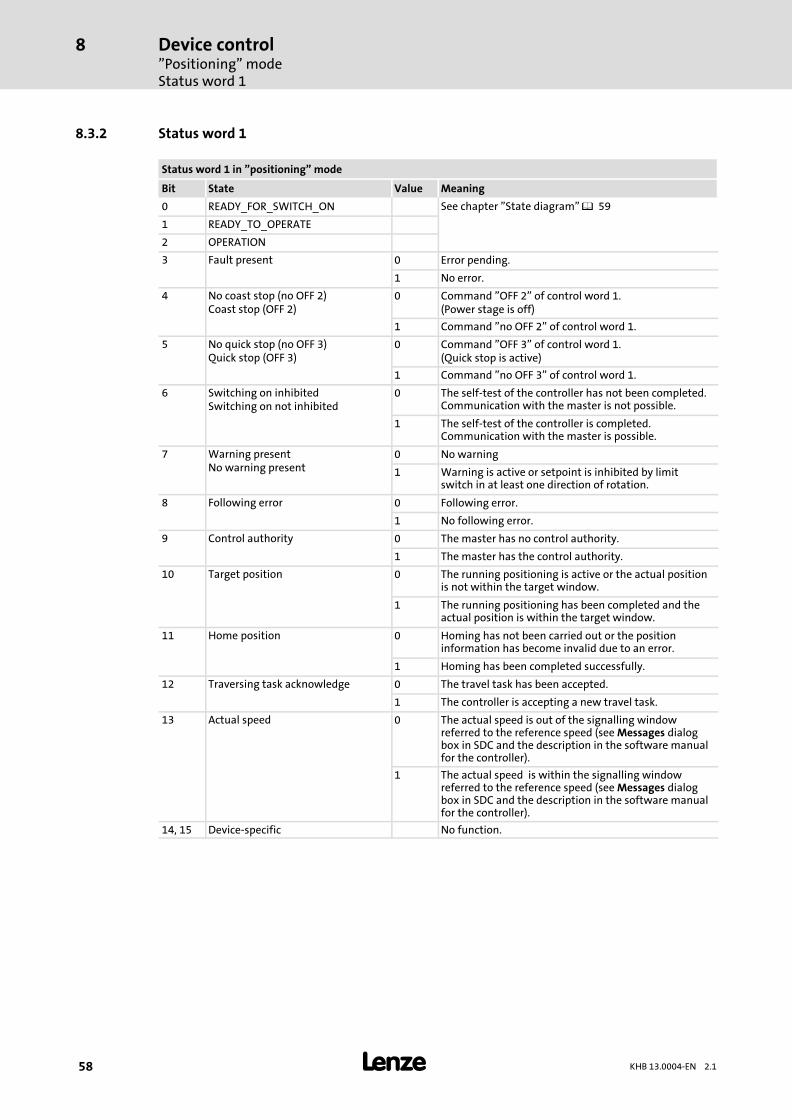
Status word 1 in "positioning" mode
Bit State Value Meaning
0 READY_FOR_SWITCH_ON See chapter "State diagram" � 59
1 READY_TO_OPERATE
2 OPERATION
3 Fault present 0 Error pending.
1 No error.
4 No coast stop (no OFF 2)Coast stop (OFF 2)
0 Command "OFF 2" of control word 1.(Power stage is off)
1 Command "no OFF 2" of control word 1.
5 No quick stop (no OFF 3)Quick stop (OFF 3)
0 Command "OFF 3" of control word 1.(Quick stop is active)
1 Command "no OFF 3" of control word 1.
6 Switching on inhibitedSwitching on not inhibited
0 The self−test of the controller has not been completed.Communication with the master is not possible.
1 The self−test of the controller is completed.Communication with the master is possible.
7 Warning presentNo warning present
0 No warning
1 Warning is active or setpoint is inhibited by limitswitch in at least one direction of rotation.
8 Following error 0 Following error.
1 No following error.
9 Control authority 0 The master has no control authority.
1 The master has the control authority.
10 Target position 0 The running positioning is active or the actual positionis not within the target window.
1 The running positioning has been completed and theactual position is within the target window.
11 Home position 0 Homing has not been carried out or the positioninformation has become invalid due to an error.
1 Homing has been completed successfully.
12 Traversing task acknowledge 0 The travel task has been accepted.
1 The controller is accepting a new travel task.
13 Actual speed 0 The actual speed is out of the signalling windowreferred to the reference speed (see Messages dialogbox in SDC and the description in the software manualfor the controller).
1 The actual speed is within the signalling windowreferred to the reference speed (see Messages dialogbox in SDC and the description in the software manualfor the controller).
14, 15 Device−specific No function.
Device controlState diagramStatus word 1
8
� 59KHB 13.0004−EN 2.1
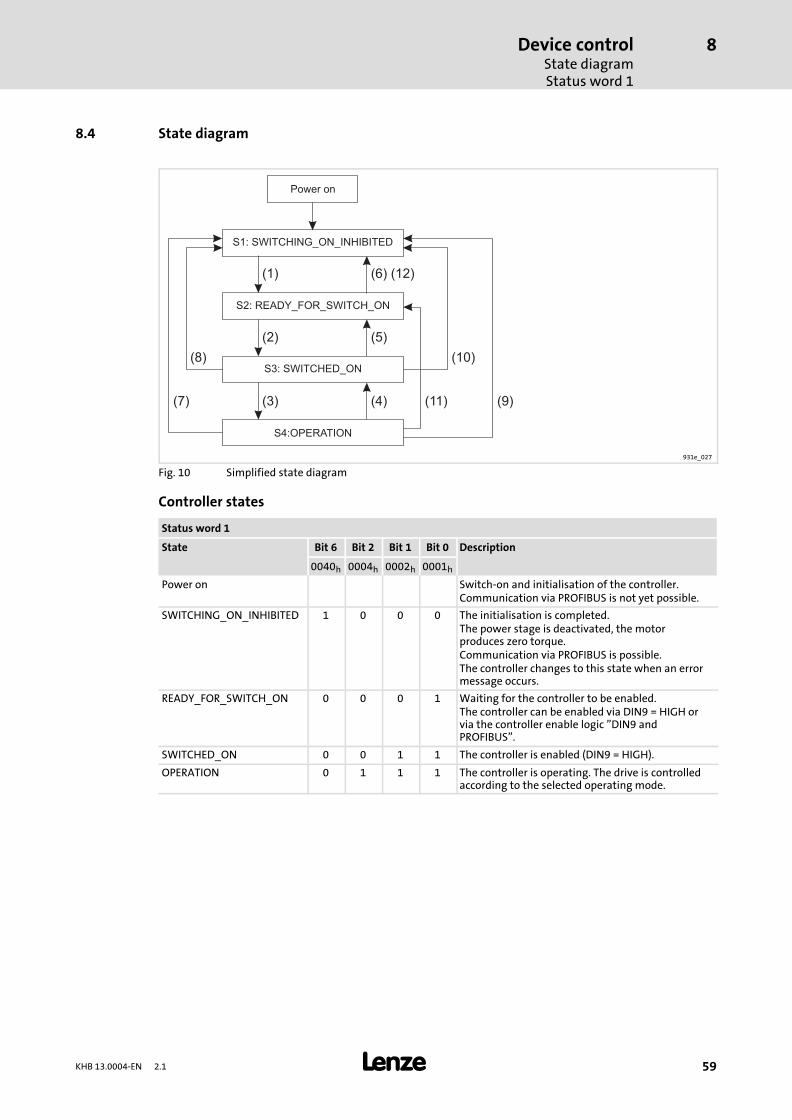
8.4 State diagram
Power on
(1)
(2)
(8)
(7) (9)(3)
(6) (12)
(5)
(10)
(11)(4)
S1: SWITCHING_ON_INHIBITED
S2: READY_FOR_SWITCH_ON
S3: SWITCHED_ON
S4:OPERATION
931e_027
Fig. 10 Simplified state diagram
Controller states
Status word 1
State Bit 6 Bit 2 Bit 1 Bit 0 Description
0040h 0004h 0002h 0001h
Power on Switch−on and initialisation of the controller.Communication via PROFIBUS is not yet possible.
SWITCHING_ON_INHIBITED 1 0 0 0 The initialisation is completed.The power stage is deactivated, the motorproduces zero torque.Communication via PROFIBUS is possible.The controller changes to this state when an errormessage occurs.
READY_FOR_SWITCH_ON 0 0 0 1 Waiting for the controller to be enabled.The controller can be enabled via DIN9 = HIGH orvia the controller enable logic "DIN9 andPROFIBUS".
SWITCHED_ON 0 0 1 1 The controller is enabled (DIN9 = HIGH).
OPERATION 0 1 1 1 The controller is operating. The drive is controlledaccording to the selected operating mode.
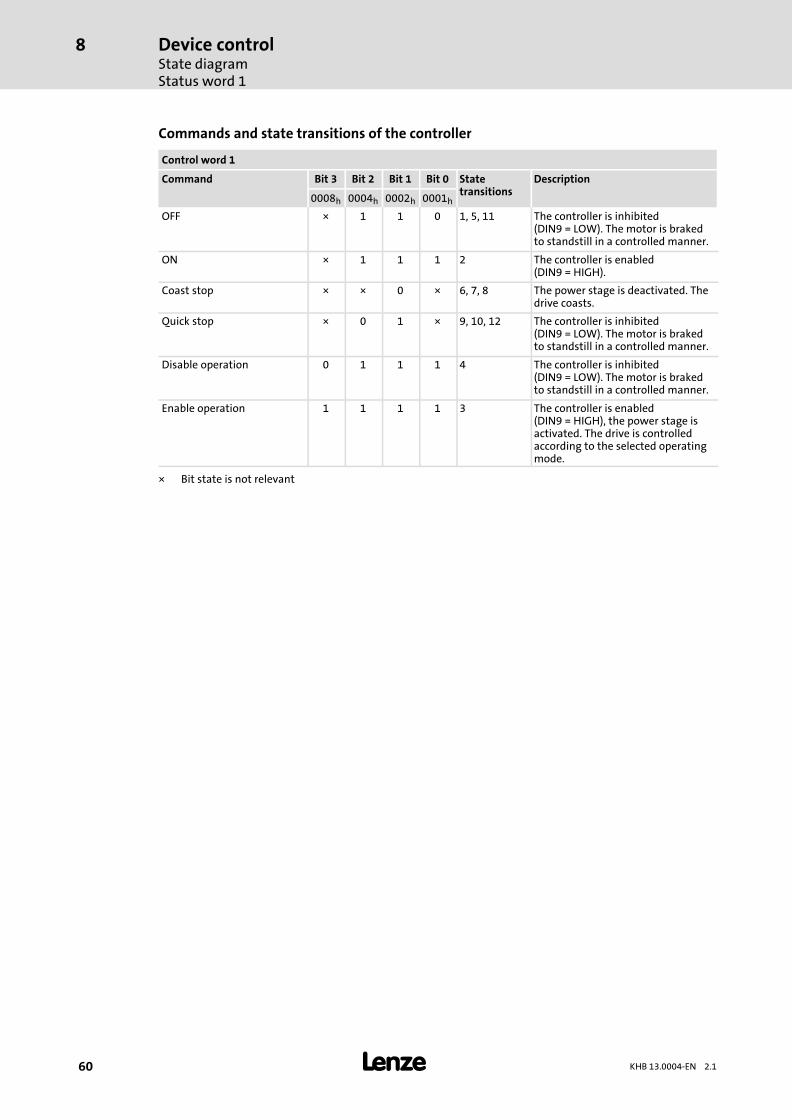
Device controlState diagramStatus word 1
8
� 60 KHB 13.0004−EN 2.1
Commands and state transitions of the controller
Control word 1
Command Bit 3 Bit 2 Bit 1 Bit 0 Statetransitions
Description
0008h 0004h 0002h 0001h
OFF × 1 1 0 1, 5, 11 The controller is inhibited(DIN9 = LOW). The motor is brakedto standstill in a controlled manner.
ON × 1 1 1 2 The controller is enabled(DIN9 = HIGH).
Coast stop × × 0 × 6, 7, 8 The power stage is deactivated. Thedrive coasts.
Quick stop × 0 1 × 9, 10, 12 The controller is inhibited(DIN9 = LOW). The motor is brakedto standstill in a controlled manner.
Disable operation 0 1 1 1 4 The controller is inhibited(DIN9 = LOW). The motor is brakedto standstill in a controlled manner.
Enable operation 1 1 1 1 3 The controller is enabled(DIN9 = HIGH), the power stage isactivated. The drive is controlledaccording to the selected operatingmode.
× Bit state is not relevant
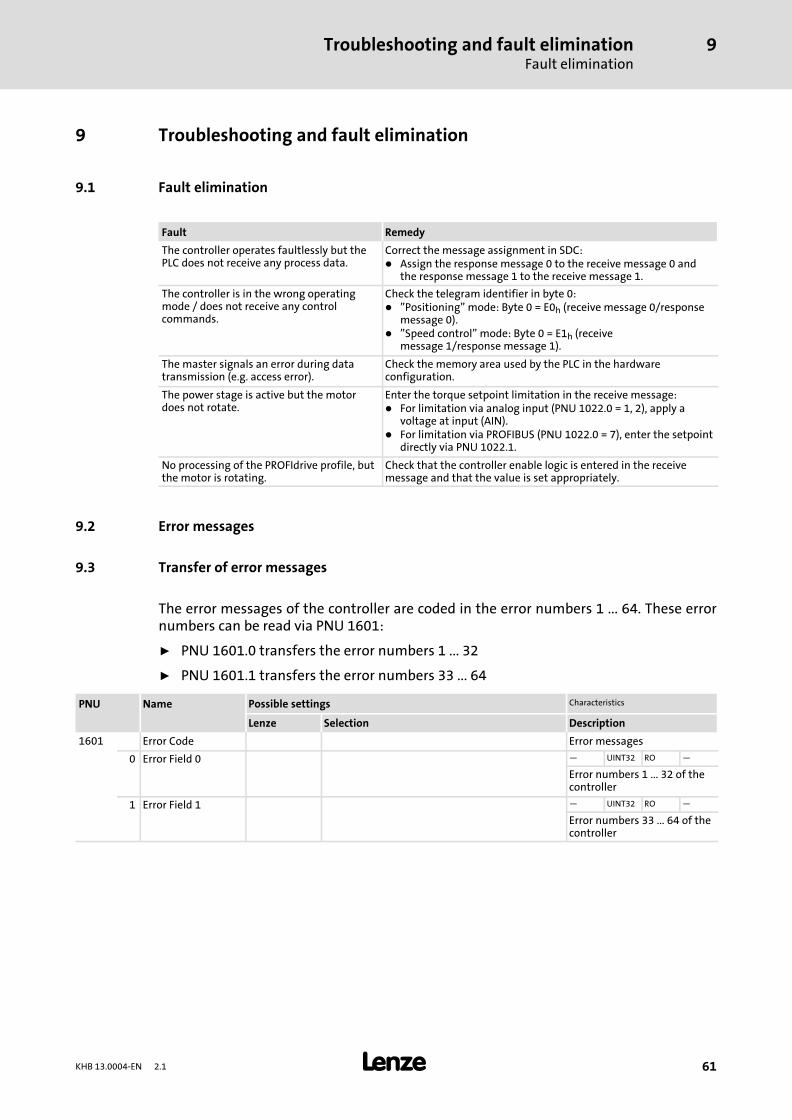
Troubleshooting and fault eliminationFault elimination
9
� 61KHB 13.0004−EN 2.1
9 Troubleshooting and fault elimination
9.1 Fault elimination
Fault Remedy
The controller operates faultlessly but thePLC does not receive any process data.
Correct the message assignment in SDC:� Assign the response message 0 to the receive message 0 and
the response message 1 to the receive message 1.
The controller is in the wrong operatingmode / does not receive any controlcommands.
Check the telegram identifier in byte 0:� "Positioning" mode: Byte 0 = E0h (receive message 0/response
message 0).� "Speed control" mode: Byte 0 = E1h (receive
message 1/response message 1).
The master signals an error during datatransmission (e.g. access error).
Check the memory area used by the PLC in the hardwareconfiguration.
The power stage is active but the motordoes not rotate.
Enter the torque setpoint limitation in the receive message:� For limitation via analog input (PNU 1022.0 = 1, 2), apply a
voltage at input (AIN).� For limitation via PROFIBUS (PNU 1022.0 = 7), enter the setpoint
directly via PNU 1022.1.
No processing of the PROFIdrive profile, butthe motor is rotating.
Check that the controller enable logic is entered in the receivemessage and that the value is set appropriately.
9.2 Error messages
9.3 Transfer of error messages
The error messages of the controller are coded in the error numbers 1 ... 64. These errornumbers can be read via PNU 1601:
ƒ PNU 1601.0 transfers the error numbers 1 ... 32
ƒ PNU 1601.1 transfers the error numbers 33 ... 64
PNU Name Possible settings Characteristics
Lenze Selection Description
1601 Error Code Error messages
0 Error Field 0 � UINT32 RO �
Error numbers 1 ... 32 of thecontroller
1 Error Field 1 � UINT32 RO �
Error numbers 33 ... 64 of thecontroller
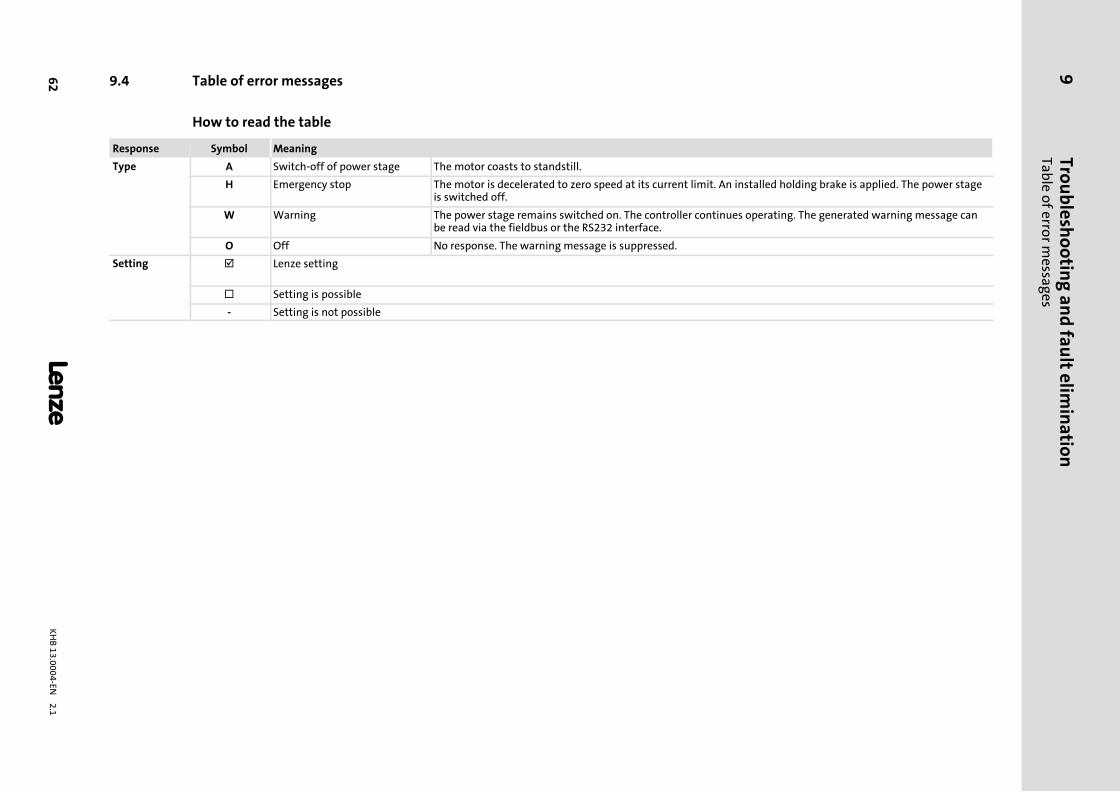
Trou
blesh
oo
ting
an
d fa
ult elim
ina
tion
Tab
le of erro
r messa
ges
9
� 6
2K
HB
13
.00
04
−EN 2
.1
9.4 Table of error messages
How to read the table
Response Symbol Meaning
Type A Switch−off of power stage The motor coasts to standstill.
H Emergency stop The motor is decelerated to zero speed at its current limit. An installed holding brake is applied. The power stageis switched off.
W Warning The power stage remains switched on. The controller continues operating. The generated warning message canbe read via the fieldbus or the RS232 interface.
O Off No response. The warning message is suppressed.
Setting � Lenze setting
� Setting is possible
− Setting is not possible
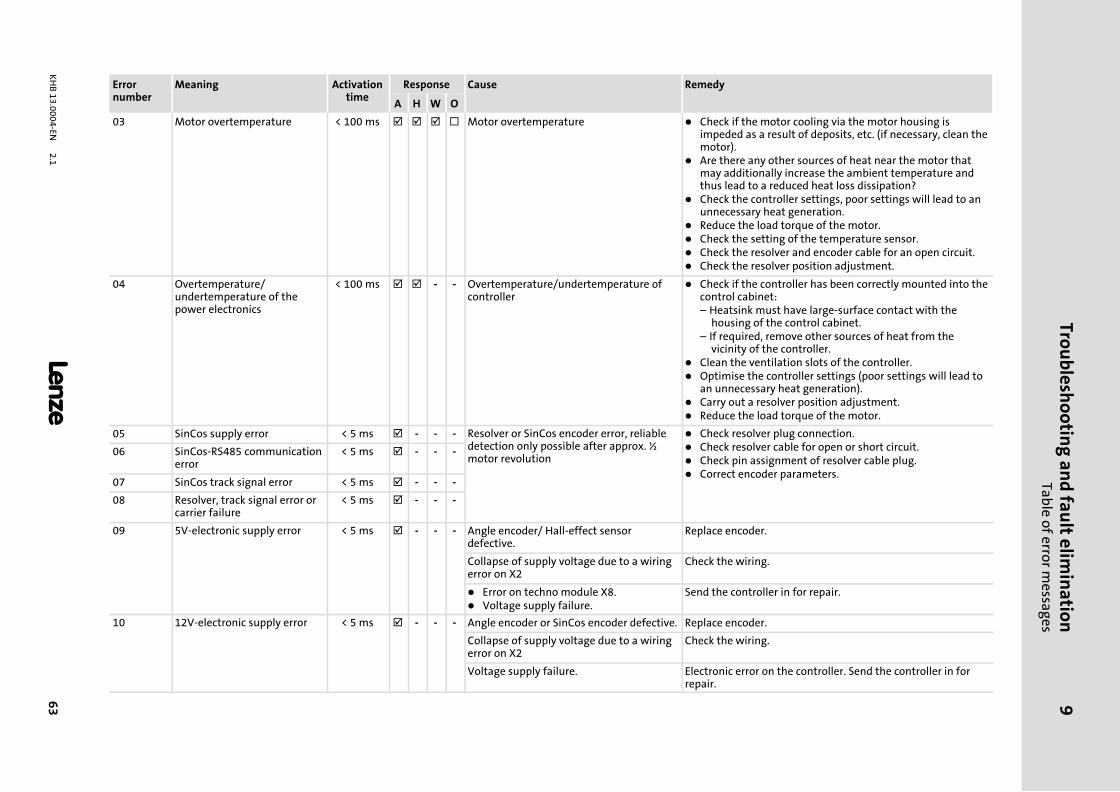
Trou
blesh
oo
ting
an
d fa
ult elim
ina
tion
Tab
le of erro
r messa
ges
9
� 6
3K
HB
13
.00
04
−EN 2
.1
Errornumber
Meaning Activationtime
Response Cause Remedy
A H W O
03 Motor overtemperature < 100 ms � � � � Motor overtemperature � Check if the motor cooling via the motor housing isimpeded as a result of deposits, etc. (if necessary, clean themotor).
� Are there any other sources of heat near the motor thatmay additionally increase the ambient temperature andthus lead to a reduced heat loss dissipation?
� Check the controller settings, poor settings will lead to anunnecessary heat generation.
� Reduce the load torque of the motor.� Check the setting of the temperature sensor.� Check the resolver and encoder cable for an open circuit.� Check the resolver position adjustment.
04 Overtemperature/undertemperature of thepower electronics
< 100 ms � � − − Overtemperature/undertemperature ofcontroller
� Check if the controller has been correctly mounted into thecontrol cabinet:– Heatsink must have large−surface contact with the
housing of the control cabinet.– If required, remove other sources of heat from the
vicinity of the controller.� Clean the ventilation slots of the controller.� Optimise the controller settings (poor settings will lead to
an unnecessary heat generation).� Carry out a resolver position adjustment.� Reduce the load torque of the motor.
05 SinCos supply error < 5 ms � − − − Resolver or SinCos encoder error, reliabledetection only possible after approx. ½motor revolution
� Check resolver plug connection.� Check resolver cable for open or short circuit.� Check pin assignment of resolver cable plug.� Correct encoder parameters.
06 SinCos−RS485 communicationerror
< 5 ms � − − −
07 SinCos track signal error < 5 ms � − − −
08 Resolver, track signal error orcarrier failure
< 5 ms � − − −
09 5V−electronic supply error < 5 ms � − − − Angle encoder/ Hall−effect sensordefective.
Replace encoder.
Collapse of supply voltage due to a wiringerror on X2
Check the wiring.
� Error on techno module X8.� Voltage supply failure.
Send the controller in for repair.
10 12V−electronic supply error < 5 ms � − − − Angle encoder or SinCos encoder defective. Replace encoder.
Collapse of supply voltage due to a wiringerror on X2
Check the wiring.
Voltage supply failure. Electronic error on the controller. Send the controller in forrepair.

Trou
blesh
oo
ting
an
d fa
ult elim
ina
tion
Tab
le of erro
r messa
ges
9
� 6
4K
HB
13
.00
04
−EN 2
.1
RemedyCauseResponseActivationtime
MeaningErrornumber
RemedyCause
OWHA
Activationtime
MeaningErrornumber
11 Error in 24V supply for logic < 5 ms � − − − � 24V supply for logic too high or too low.� Load capacity of 24V supply for logic is
too low, e.g. when activating theholding brake.
Send the controller in for repair.
Holding brake defective. Replace holding brake.
Overload of brake output due to incorrectdimensioning of the brake.
Replace with appropriate holding brake.
Collapse of supply voltage due to a wiringerror on X3
Check the wiring.
13 Offset current measurementerror
< 5 ms � − − − Send the controller in for repair.
14 DC bus / power stageovercurrent
< 10 �s � − − − Short circuit in the motor winding, shortcircuit between motor winding andhousing.
Replace motor.
Short circuit in the motor cable, betweentwo phase or between phase and shield.
Replace motor cable.
Controller defective (power stagedefective, insulation fault).
Send the controller in for repair.
15 DC−bus undervoltage < 1 ms � � � � DC−bus voltage too low. � Check DC bus voltage, adapt undervoltage trippingthreshold, if necessary.
16 DC bus overvoltage < 1 ms � − − − DC−bus voltage > 70 V. � Check correct functioning of power supply unit andwhether the supply voltage for the power stage is withinthe permissible range (19.2 V DC ... 57.6 V DC).
� Set a flatter gradient for the deceleration ramp.� Connect an external brake resistor to X2.� Check whether other devices connected to the power
stage cause the overvoltage.
19 I2t error of motor (I2t at 100%) < 100 ms � � � � I2t error of motor. � Adapt i2t time of motor.� Carry out a resolver position adjustment.� Check the selected motor data.� Optimise the controller setting.� Adapt the travel profile (e.g. adapt the acceleration ramps).� Reduce the load torque of the motor.
20 I2t error of controller (I2t at100%)
< 100 ms � � � � I2t error of controller.
26 I2t at 80% < 100 ms � � � � I2t error.
27 Motor temperature 5 °Cbelow maximum value
< 100 ms � � � � Motor is overloaded. Check drive dimensioning.
28 Power stage temperature 5 °Cbelow maximum value
< 100 ms � � � � Controller is overloaded. � Check drive dimensioning.� Check ambient temperature in the control cabinet and
heat dissipation of the heatsink.
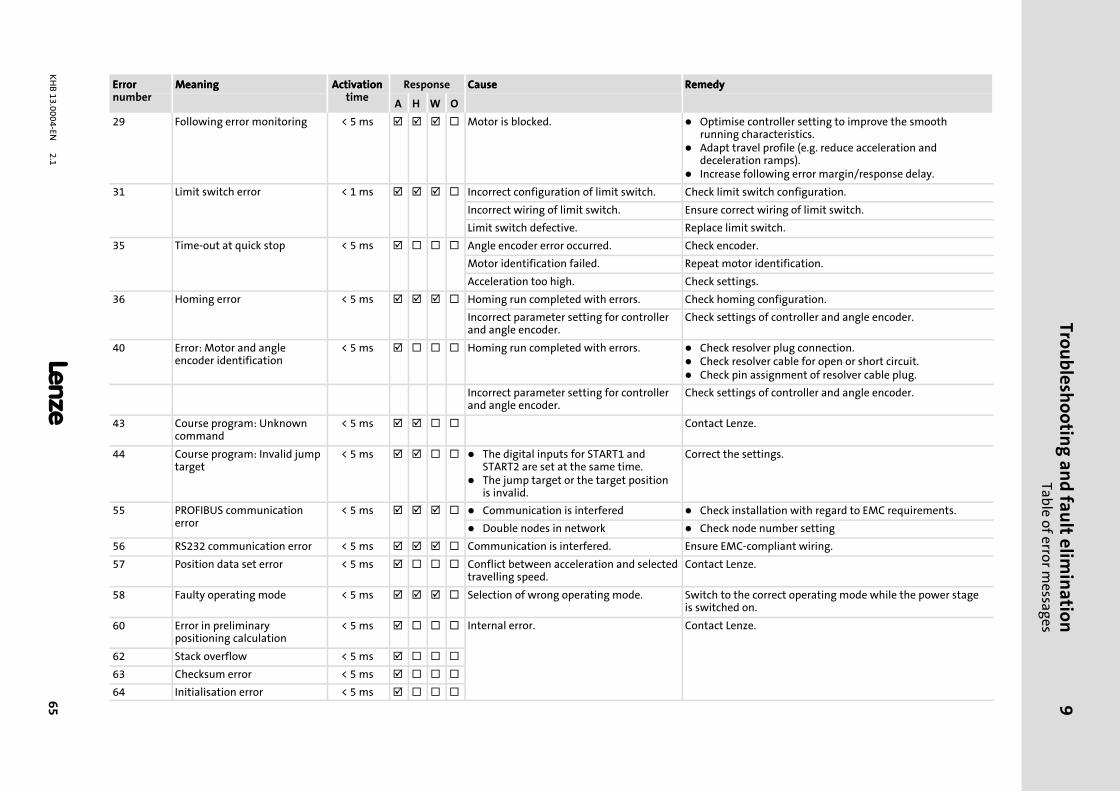
Trou
blesh
oo
ting
an
d fa
ult elim
ina
tion
Tab
le of erro
r messa
ges
9
� 6
5K
HB
13
.00
04
−EN 2
.1
RemedyCauseResponseActivationtime
MeaningErrornumber
RemedyCause
OWHA
Activationtime
MeaningErrornumber
29 Following error monitoring < 5 ms � � � � Motor is blocked. � Optimise controller setting to improve the smoothrunning characteristics.
� Adapt travel profile (e.g. reduce acceleration anddeceleration ramps).
� Increase following error margin/response delay.
31 Limit switch error < 1 ms � � � � Incorrect configuration of limit switch. Check limit switch configuration.
Incorrect wiring of limit switch. Ensure correct wiring of limit switch.
Limit switch defective. Replace limit switch.
35 Time−out at quick stop < 5 ms � � � � Angle encoder error occurred. Check encoder.
Motor identification failed. Repeat motor identification.
Acceleration too high. Check settings.
36 Homing error < 5 ms � � � � Homing run completed with errors. Check homing configuration.
Incorrect parameter setting for controllerand angle encoder.
Check settings of controller and angle encoder.
40 Error: Motor and angleencoder identification
< 5 ms � � � � Homing run completed with errors. � Check resolver plug connection.� Check resolver cable for open or short circuit.� Check pin assignment of resolver cable plug.
Incorrect parameter setting for controllerand angle encoder.
Check settings of controller and angle encoder.
43 Course program: Unknowncommand
< 5 ms � � � � Contact Lenze.
44 Course program: Invalid jumptarget
< 5 ms � � � � � The digital inputs for START1 andSTART2 are set at the same time.
� The jump target or the target positionis invalid.
Correct the settings.
55 PROFIBUS communicationerror
< 5 ms � � � � � Communication is interfered � Check installation with regard to EMC requirements.
� Double nodes in network � Check node number setting
56 RS232 communication error < 5 ms � � � � Communication is interfered. Ensure EMC−compliant wiring.
57 Position data set error < 5 ms � � � � Conflict between acceleration and selectedtravelling speed.
Contact Lenze.
58 Faulty operating mode < 5 ms � � � � Selection of wrong operating mode. Switch to the correct operating mode while the power stageis switched on.
60 Error in preliminarypositioning calculation
< 5 ms � � � � Internal error. Contact Lenze.
62 Stack overflow < 5 ms � � � �
63 Checksum error < 5 ms � � � �
64 Initialisation error < 5 ms � � � �
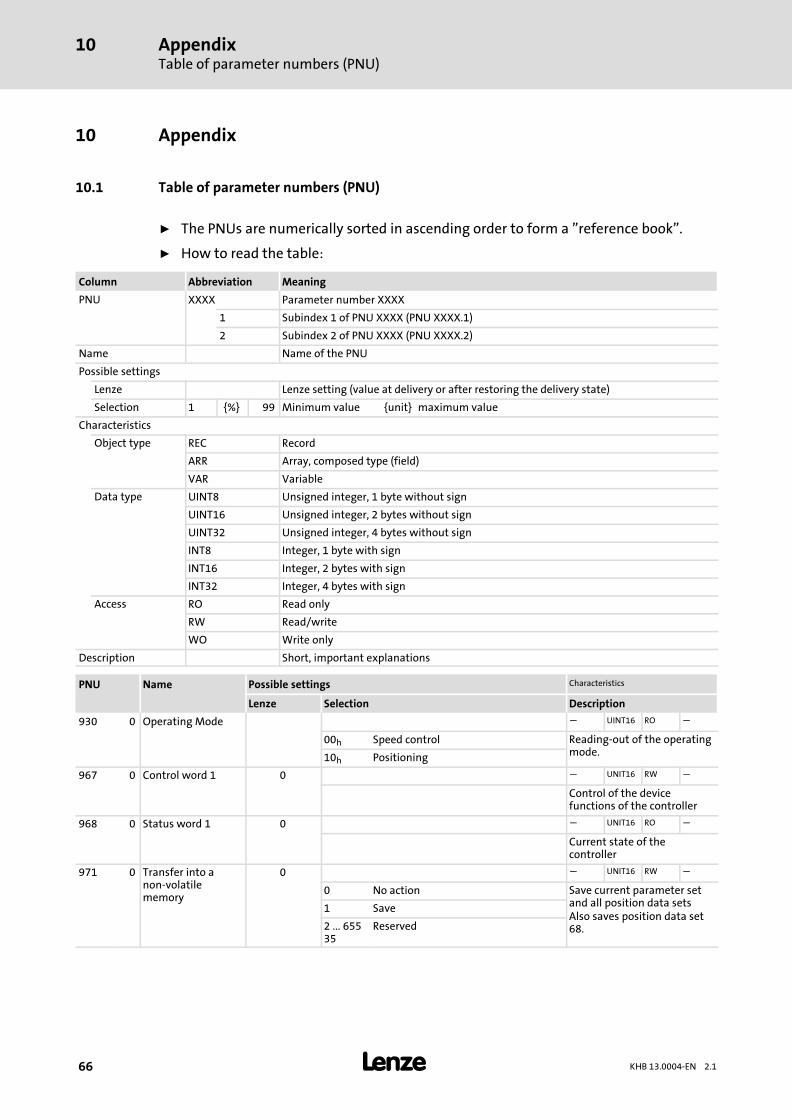
AppendixTable of parameter numbers (PNU)
10
� 66 KHB 13.0004−EN 2.1
10 Appendix
10.1 Table of parameter numbers (PNU)
ƒ The PNUs are numerically sorted in ascending order to form a "reference book".
ƒ How to read the table:
Column Abbreviation Meaning
PNU XXXX Parameter number XXXX
1 Subindex 1 of PNU XXXX (PNU XXXX.1)
2 Subindex 2 of PNU XXXX (PNU XXXX.2)
Name Name of the PNU
Possible settings
Lenze Lenze setting (value at delivery or after restoring the delivery state)
Selection 1 {%} 99 Minimum value {unit} maximum value
Characteristics
Object type REC Record
ARR Array, composed type (field)
VAR Variable
Data type UINT8 Unsigned integer, 1 byte without sign
UINT16 Unsigned integer, 2 bytes without sign
UINT32 Unsigned integer, 4 bytes without sign
INT8 Integer, 1 byte with sign
INT16 Integer, 2 bytes with sign
INT32 Integer, 4 bytes with sign
Access RO Read only
RW Read/write
WO Write only
Description Short, important explanations
PNU Name Possible settings Characteristics
Lenze Selection Description
930 0 Operating Mode � UINT16 RO �
00h Speed control Reading−out of the operatingmode.10h Positioning
967 0 Control word 1 0 � UNIT16 RW �
Control of the devicefunctions of the controller
968 0 Status word 1 0 � UNIT16 RO �
Current state of thecontroller
971 0 Transfer into anon−volatilememory
0 � UNIT16 RW �
0 No action Save current parameter setand all position data setsAlso saves position data set68.
1 Save
2 ... 65535
Reserved
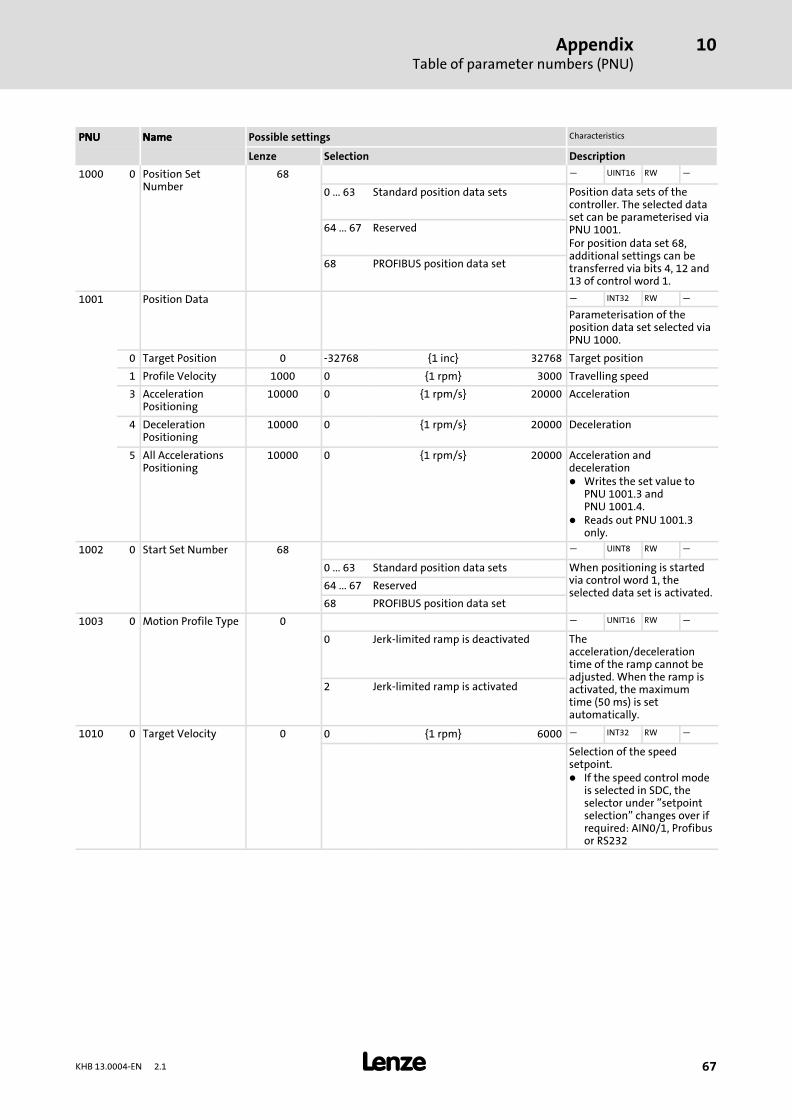
AppendixTable of parameter numbers (PNU)
10
� 67KHB 13.0004−EN 2.1
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
1000 0 Position SetNumber
68 � UINT16 RW �
0 ... 63 Standard position data sets Position data sets of thecontroller. The selected dataset can be parameterised viaPNU 1001.For position data set 68,additional settings can betransferred via bits 4, 12 and13 of control word 1.
64 ... 67 Reserved
68 PROFIBUS position data set
1001 Position Data � INT32 RW �
Parameterisation of theposition data set selected viaPNU 1000.
0 Target Position 0 −32768 {1 inc} 32768 Target position
1 Profile Velocity 1000 0 {1 rpm} 3000 Travelling speed
3 AccelerationPositioning
10000 0 {1 rpm/s} 20000 Acceleration
4 DecelerationPositioning
10000 0 {1 rpm/s} 20000 Deceleration
5 All AccelerationsPositioning
10000 0 {1 rpm/s} 20000 Acceleration anddeceleration� Writes the set value to
PNU 1001.3 andPNU 1001.4.
� Reads out PNU 1001.3only.
1002 0 Start Set Number 68 � UINT8 RW �
0 ... 63 Standard position data sets When positioning is startedvia control word 1, theselected data set is activated.
64 ... 67 Reserved
68 PROFIBUS position data set
1003 0 Motion Profile Type 0 � UNIT16 RW �
0 Jerk−limited ramp is deactivated Theacceleration/decelerationtime of the ramp cannot beadjusted. When the ramp isactivated, the maximumtime (50 ms) is setautomatically.
2 Jerk−limited ramp is activated
1010 0 Target Velocity 0 0 {1 rpm} 6000 � INT32 RW �
Selection of the speedsetpoint.� If the speed control mode
is selected in SDC, theselector under "setpointselection" changes over ifrequired: AIN0/1, Profibusor RS232
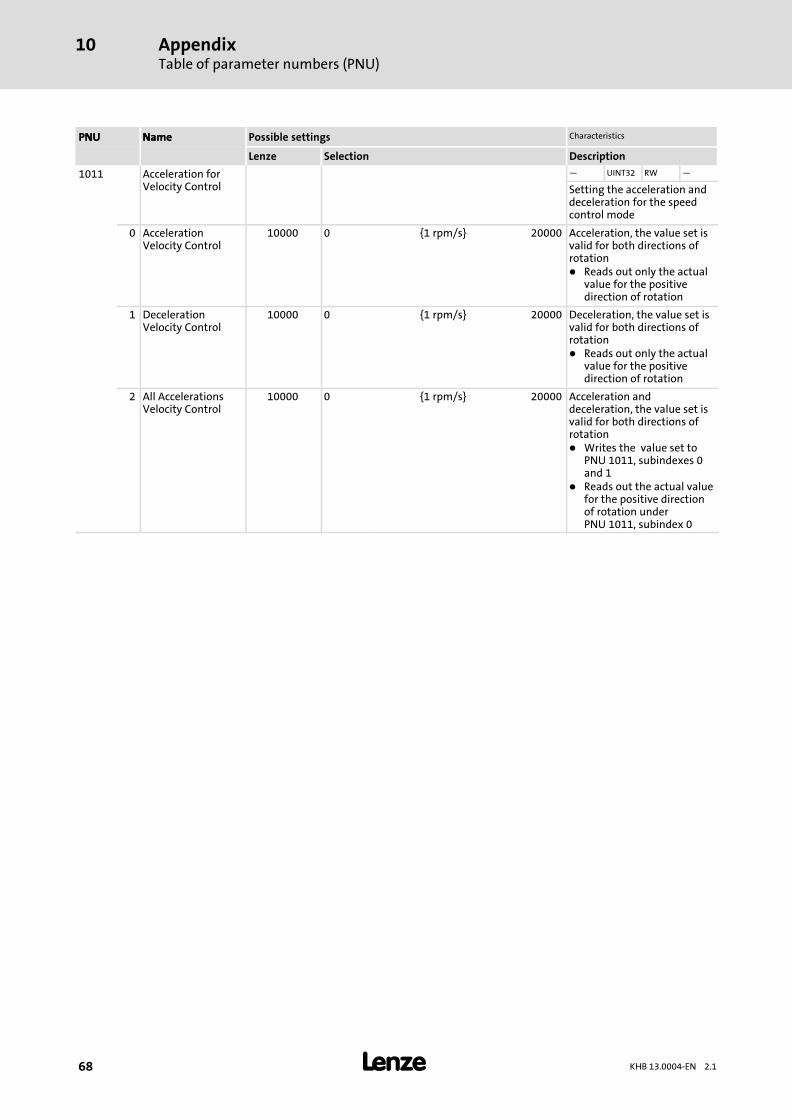
AppendixTable of parameter numbers (PNU)
10
� 68 KHB 13.0004−EN 2.1
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
1011 Acceleration forVelocity Control
� UINT32 RW �
Setting the acceleration anddeceleration for the speedcontrol mode
0 AccelerationVelocity Control
10000 0 {1 rpm/s} 20000 Acceleration, the value set isvalid for both directions ofrotation� Reads out only the actual
value for the positivedirection of rotation
1 DecelerationVelocity Control
10000 0 {1 rpm/s} 20000 Deceleration, the value set isvalid for both directions ofrotation� Reads out only the actual
value for the positivedirection of rotation
2 All AccelerationsVelocity Control
10000 0 {1 rpm/s} 20000 Acceleration anddeceleration, the value set isvalid for both directions ofrotation� Writes the value set to
PNU 1011, subindexes 0and 1
� Reads out the actual valuefor the positive directionof rotation underPNU 1011, subindex 0
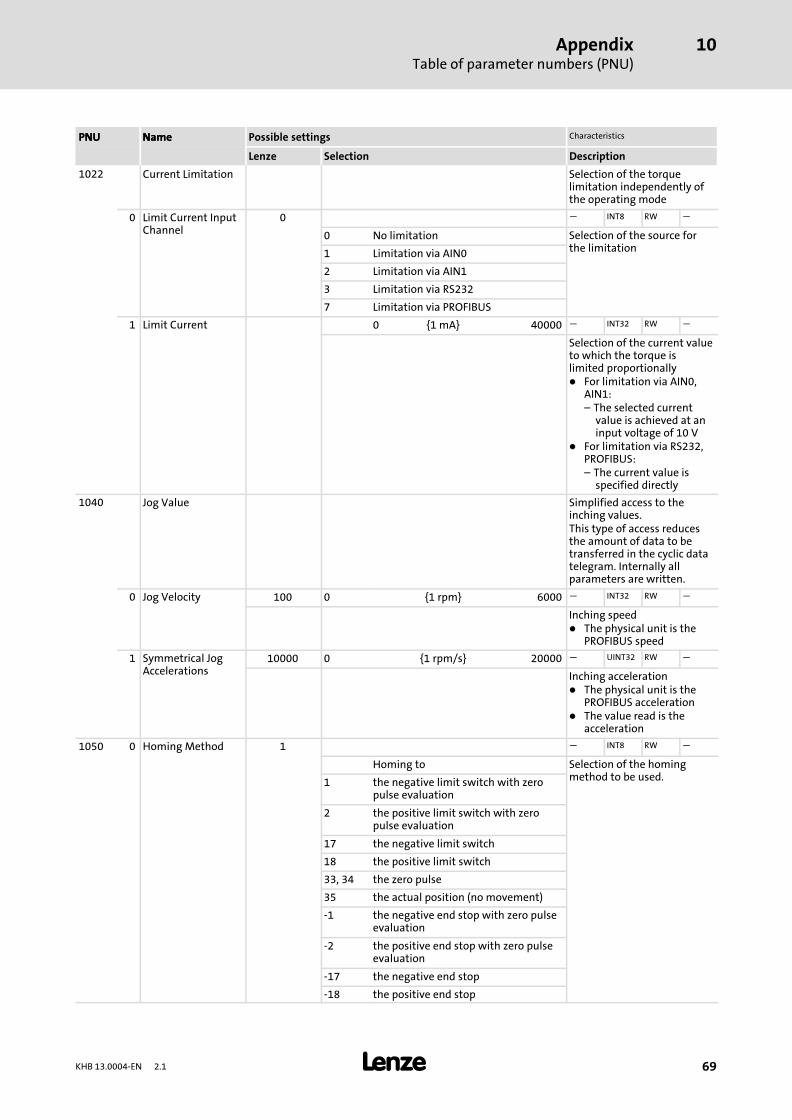
AppendixTable of parameter numbers (PNU)
10
� 69KHB 13.0004−EN 2.1
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
1022 Current Limitation Selection of the torquelimitation independently ofthe operating mode
0 Limit Current InputChannel
0 � INT8 RW �
0 No limitation Selection of the source forthe limitation1 Limitation via AIN0
2 Limitation via AIN1
3 Limitation via RS232
7 Limitation via PROFIBUS
1 Limit Current 0 {1 mA} 40000 � INT32 RW �
Selection of the current valueto which the torque islimited proportionally� For limitation via AIN0,
AIN1:– The selected current
value is achieved at aninput voltage of 10 V
� For limitation via RS232,PROFIBUS:– The current value is
specified directly
1040 Jog Value Simplified access to theinching values.This type of access reducesthe amount of data to betransferred in the cyclic datatelegram. Internally allparameters are written.
0 Jog Velocity 100 0 {1 rpm} 6000 � INT32 RW �
Inching speed� The physical unit is the
PROFIBUS speed
1 Symmetrical JogAccelerations
10000 0 {1 rpm/s} 20000 � UINT32 RW �
Inching acceleration� The physical unit is the
PROFIBUS acceleration� The value read is the
acceleration
1050 0 Homing Method 1 � INT8 RW �
Homing to Selection of the homingmethod to be used.1 the negative limit switch with zero
pulse evaluation
2 the positive limit switch with zeropulse evaluation
17 the negative limit switch
18 the positive limit switch
33, 34 the zero pulse
35 the actual position (no movement)
−1 the negative end stop with zero pulseevaluation
−2 the positive end stop with zero pulseevaluation
−17 the negative end stop
−18 the positive end stop
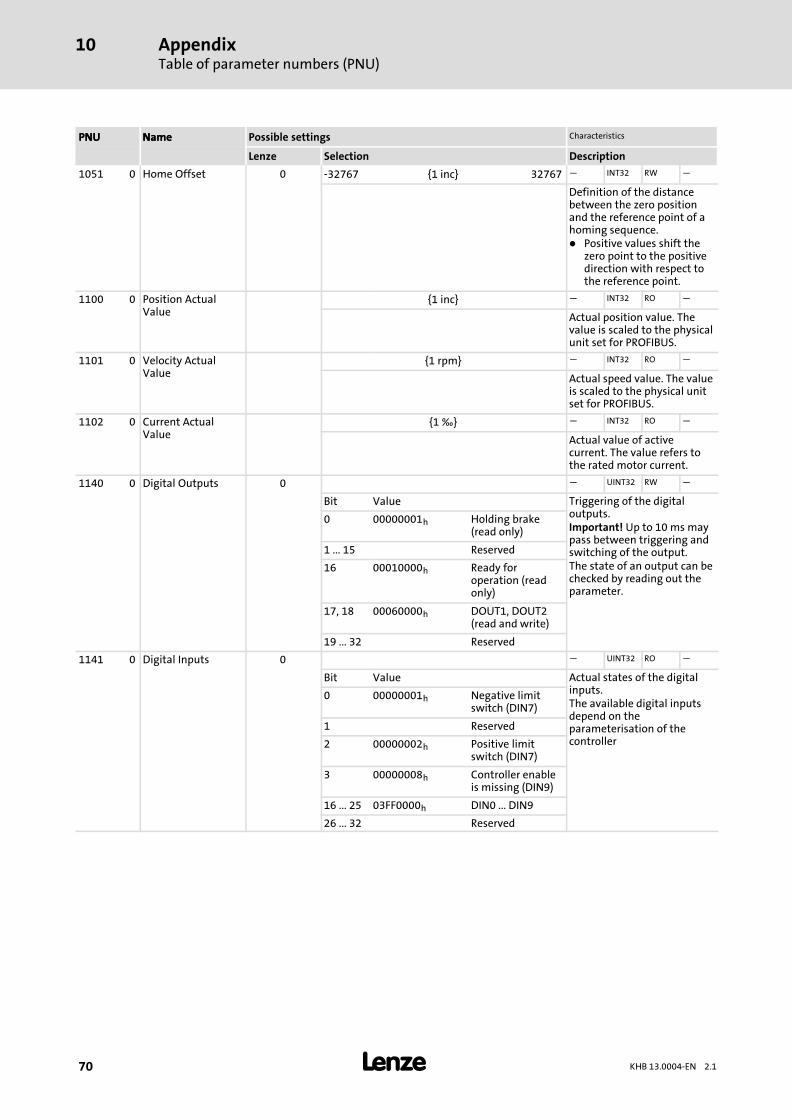
AppendixTable of parameter numbers (PNU)
10
� 70 KHB 13.0004−EN 2.1
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
1051 0 Home Offset 0 −32767 {1 inc} 32767 � INT32 RW �
Definition of the distancebetween the zero positionand the reference point of ahoming sequence.� Positive values shift the
zero point to the positivedirection with respect tothe reference point.
1100 0 Position ActualValue
{1 inc} � INT32 RO �
Actual position value. Thevalue is scaled to the physicalunit set for PROFIBUS.
1101 0 Velocity ActualValue
{1 rpm} � INT32 RO �
Actual speed value. The valueis scaled to the physical unitset for PROFIBUS.
1102 0 Current ActualValue
{1 �} � INT32 RO �
Actual value of activecurrent. The value refers tothe rated motor current.
1140 0 Digital Outputs 0 � UINT32 RW �
Bit Value Triggering of the digitaloutputs.Important! Up to 10 ms maypass between triggering andswitching of the output.The state of an output can bechecked by reading out theparameter.
0 00000001h Holding brake(read only)
1 ... 15 Reserved
16 00010000h Ready foroperation (readonly)
17, 18 00060000h DOUT1, DOUT2(read and write)
19 ... 32 Reserved
1141 0 Digital Inputs 0 � UINT32 RO �
Bit Value Actual states of the digitalinputs.The available digital inputsdepend on theparameterisation of thecontroller
0 00000001h Negative limitswitch (DIN7)
1 Reserved
2 00000002h Positive limitswitch (DIN7)
3 00000008h Controller enableis missing (DIN9)
16 ... 25 03FF0000h DIN0 ... DIN9
26 ... 32 Reserved
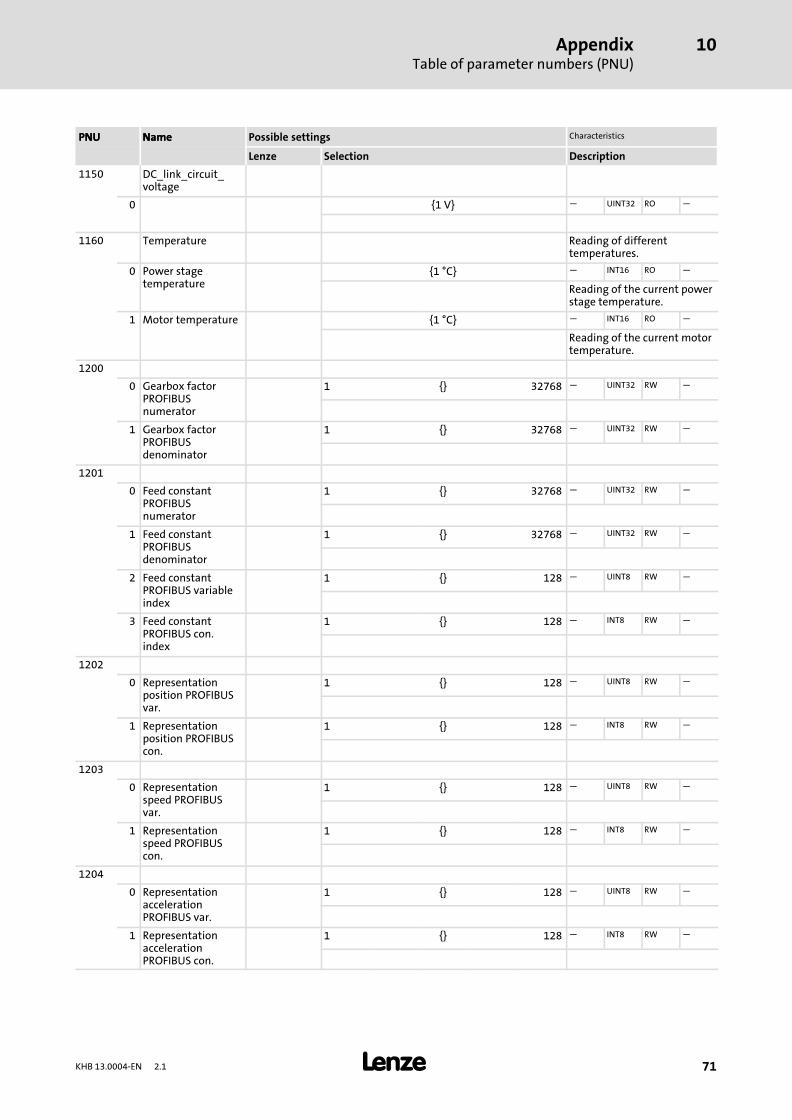
AppendixTable of parameter numbers (PNU)
10
� 71KHB 13.0004−EN 2.1
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
1150 DC_link_circuit_voltage
0 {1 V} � UINT32 RO �
1160 Temperature Reading of differenttemperatures.
0 Power stagetemperature
{1 °C} � INT16 RO �
Reading of the current powerstage temperature.
1 Motor temperature {1 °C} � INT16 RO �
Reading of the current motortemperature.
1200
0 Gearbox factorPROFIBUSnumerator
1 {} 32768 � UINT32 RW �
1 Gearbox factorPROFIBUSdenominator
1 {} 32768 � UINT32 RW �
1201
0 Feed constantPROFIBUSnumerator
1 {} 32768 � UINT32 RW �
1 Feed constantPROFIBUSdenominator
1 {} 32768 � UINT32 RW �
2 Feed constantPROFIBUS variableindex
1 {} 128 � UINT8 RW �
3 Feed constantPROFIBUS con.index
1 {} 128 � INT8 RW �
1202
0 Representationposition PROFIBUSvar.
1 {} 128 � UINT8 RW �
1 Representationposition PROFIBUScon.
1 {} 128 � INT8 RW �
1203
0 Representationspeed PROFIBUSvar.
1 {} 128 � UINT8 RW �
1 Representationspeed PROFIBUScon.
1 {} 128 � INT8 RW �
1204
0 RepresentationaccelerationPROFIBUS var.
1 {} 128 � UINT8 RW �
1 RepresentationaccelerationPROFIBUS con.
1 {} 128 � INT8 RW �
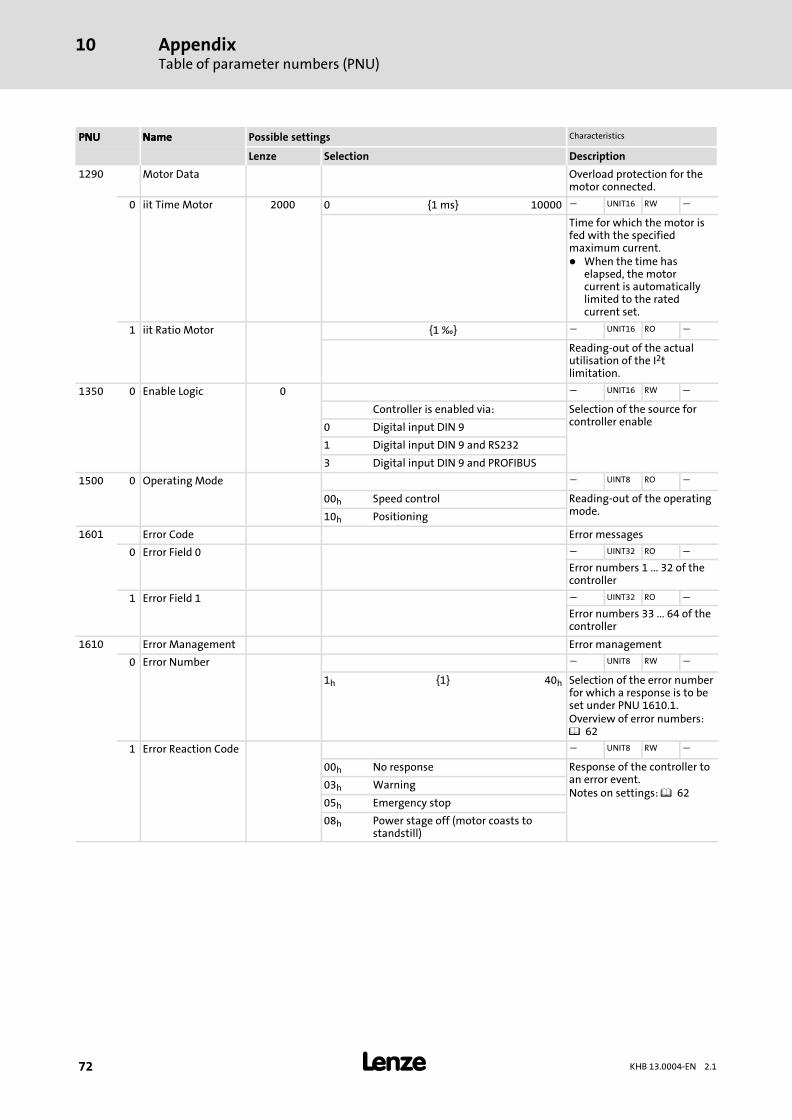
AppendixTable of parameter numbers (PNU)
10
� 72 KHB 13.0004−EN 2.1
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
1290 Motor Data Overload protection for themotor connected.
0 iit Time Motor 2000 0 {1 ms} 10000 � UNIT16 RW �
Time for which the motor isfed with the specifiedmaximum current.� When the time has
elapsed, the motorcurrent is automaticallylimited to the ratedcurrent set.
1 iit Ratio Motor {1 �} � UNIT16 RO �
Reading−out of the actualutilisation of the I2tlimitation.
1350 0 Enable Logic 0 � UNIT16 RW �
Controller is enabled via: Selection of the source forcontroller enable0 Digital input DIN 9
1 Digital input DIN 9 and RS232
3 Digital input DIN 9 and PROFIBUS
1500 0 Operating Mode � UINT8 RO �
00h Speed control Reading−out of the operatingmode.10h Positioning
1601 Error Code Error messages
0 Error Field 0 � UINT32 RO �
Error numbers 1 ... 32 of thecontroller
1 Error Field 1 � UINT32 RO �
Error numbers 33 ... 64 of thecontroller
1610 Error Management Error management
0 Error Number � UNIT8 RW �
1h {1} 40h Selection of the error numberfor which a response is to beset under PNU 1610.1.Overview of error numbers:� 62
1 Error Reaction Code � UNIT8 RW �
00h No response Response of the controller toan error event.Notes on settings: � 62
03h Warning
05h Emergency stop
08h Power stage off (motor coasts tostandstill)
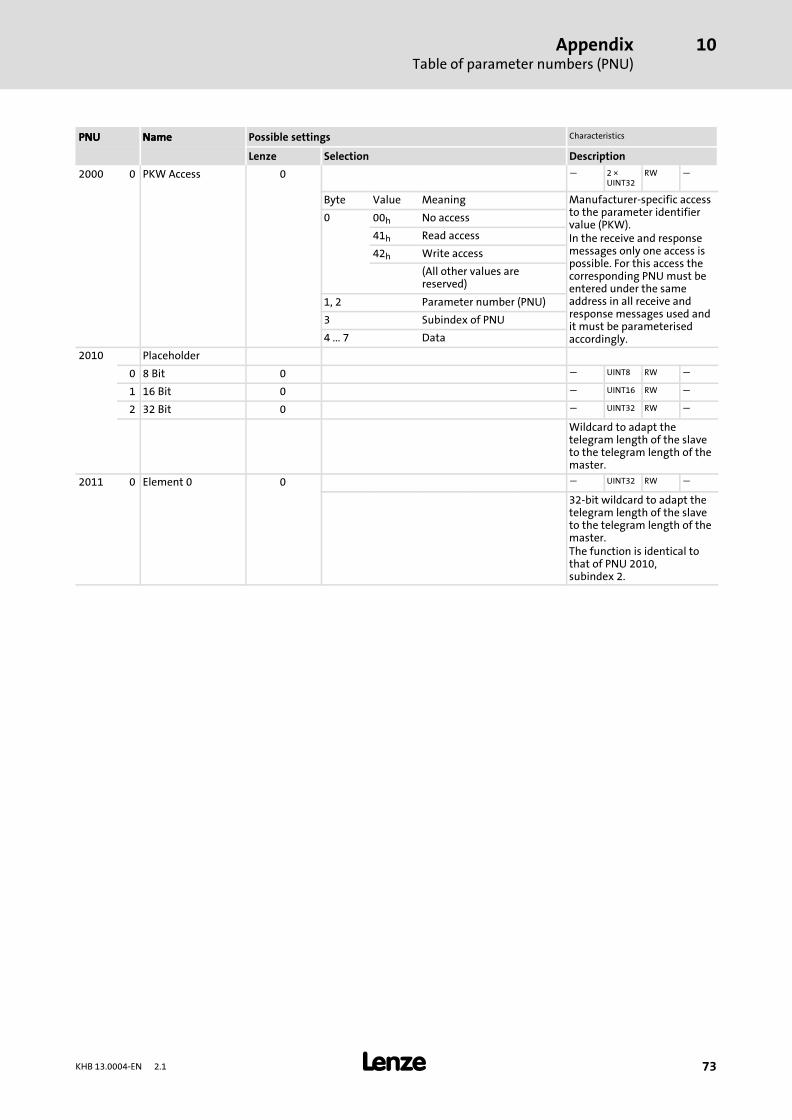
AppendixTable of parameter numbers (PNU)
10
� 73KHB 13.0004−EN 2.1
CharacteristicsPossible settingsNamePNU
DescriptionSelectionLenze
NamePNU
2000 0 PKW Access 0 � 2 ×UINT32
RW �
Byte Value Meaning Manufacturer−specific accessto the parameter identifiervalue (PKW).In the receive and responsemessages only one access ispossible. For this access thecorresponding PNU must beentered under the sameaddress in all receive andresponse messages used andit must be parameterisedaccordingly.
0 00h No access
41h Read access
42h Write access
(All other values arereserved)
1, 2 Parameter number (PNU)
3 Subindex of PNU
4 ... 7 Data
2010 Placeholder
0 8 Bit 0 � UINT8 RW �
1 16 Bit 0 � UINT16 RW �
2 32 Bit 0 � UINT32 RW �
Wildcard to adapt thetelegram length of the slaveto the telegram length of themaster.
2011 0 Element 0 0 � UINT32 RW �
32−bit wildcard to adapt thetelegram length of the slaveto the telegram length of themaster.The function is identical tothat of PNU 2010,subindex 2.
Index11
�74 KHB 13.0004−EN 2.1
11 Index
AActual position, 40
Actual speed value, 40
Actual value of effective current, 40
BBasic wiring of the PROFIBUS, 11
Baud rate, 10
CCable length, per bus segment, 10
Cable specification, 13
Command, control word 1, 55 , 57
Commissioning, 19
− Defining the positioning profile, setting of positioningprofile parameters, 49
− Initial switch−on, 19
− Setting of homing, 31 homing modes, 51
Communication, PROFIBUS, 15
Communication profile, 10
Consistent parameter data, 18
Control word 1
− "Positioning" mode, 57
− "Speed control" mode, 55
DDefinition of notes used, 8
Device control, 54
Digital inputs, 41
Digital outputs, 41
Drive profile, 10
EElectrical installation, 11
FFault elimination, 61
HHoming, offset setting, 52
Homing modes, 51
IInching mode (manual jog), setting, 45
Initial switch−on, 19
Inputs, digital, 41
Installation, electrical, 11
JJerk limitation, 50
MManual jog (inching mode), setting, 45
Modes for homing, 51
Motor data, 42 , 46
NNetwork topology, 10
Notes, definition, 8
Number of bus stations, 12
OOffset, for homing, 52
Outputs, digital, 41
PParameter data, consistent , 18
Parameter setting, 43
Parameters, positioning profile parameters, setting, 49
Position data set
− At starting of positioning, 50
− Selection for parameter setting, 49
Positioning, 32
− Actual position, 40
− Control word 1, 57
− Data set at starting of positioning, 50
− Selection of data set for parameter setting, 49
− Status word 1, 58
Positioning profile parameters, setting, 49
Product description, 9
Product features, 9
PROFIBUS, communication, 15
PROFIBUS−DP function module, communication medium,10
Index 11
� 75KHB 13.0004−EN 2.1
RReceive message, structure, 15
Response message, structure, 16
SSafety instructions
− definition, 8
− layout, 8
Saving, parameter set, 45
Saving of parameter set, 45
Setting of homing, 31
− homing modes, 51
Specification of the transmission cable, 13
Speed control
− Control word 1, 55
− Status word 1, 56
Speed setpoint, 47
State diagram, 59
Status word 1
− "Positioning" mode, 58
− "Speed control" mode, 56
Switch on, initial, 19
TTechnical data, 10
Transmission cable, specification, 13
Troubleshooting and fault elimination, 61
VValidity of the documentation, 6
�© 07/2010
� Lenze Drives GmbHPostfach 10 13 52D−31763 HamelnGermany
Service Lenze Service GmbHBreslauer Straße 3D−32699 ExtertalGermany
� +49�(0)51�54�/ 82−0 � 00�80�00�/ 24�4�68�77 (24 h helpline)
� +49�(0)51�54�/ 82−28 00 � +49�(0)51�54�/ 82−11 12
� [email protected] � [email protected]
� www.Lenze.com
KHB 13.0004−EN � .Bò* � � 2.1 � TD34
10 9 8 7 6 5 4 3 2 1