composantes des chaÎnes fonctionnelles...
TRANSCRIPT
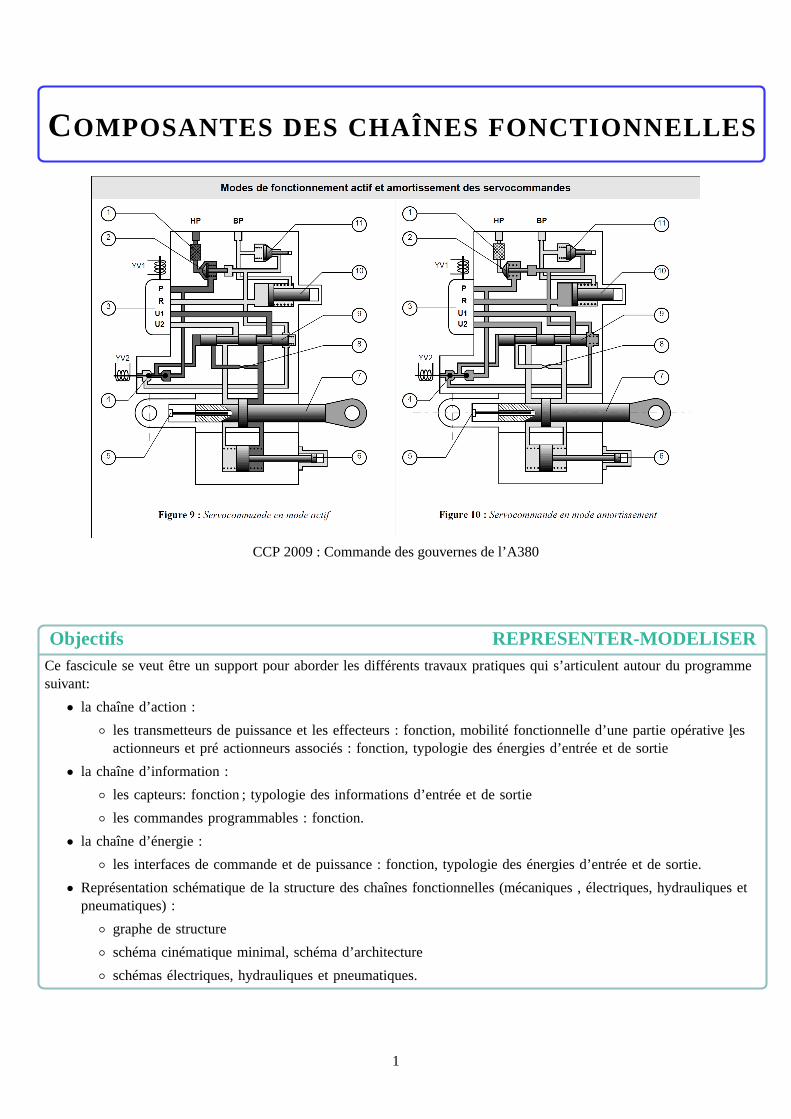
COMPOSANTES DES CHAÎNES FONCTIONNELLES
CCP 2009 : Commande des gouvernes de l’A380
Objectifs REPRESENTER-MODELISERCe fascicule se veut être un support pour aborder les différents travaux pratiques qui s’articulent autour du programmesuivant:
• la chaîne d’action :
les transmetteurs de puissance et les effecteurs : fonction, mobilité fonctionnelle d’une partie opérative lesactionneurs et pré actionneurs associés : fonction, typologie des énergies d’entrée et de sortie
• la chaîne d’information :
les capteurs: fonction ; typologie des informations d’entrée et de sortie
les commandes programmables : fonction.
• la chaîne d’énergie :
les interfaces de commande et de puissance : fonction, typologie des énergies d’entrée et de sortie.
• Représentation schématique de la structure des chaînes fonctionnelles (mécaniques , électriques, hydrauliques etpneumatiques) :
graphe de structure
schéma cinématique minimal, schéma d’architecture
schémas électriques, hydrauliques et pneumatiques.
1
Table des matières
1 Chaînes fonctionnelles 31.1 Structure générale d’un système automatisé . . . . . . . . . . . . . . . . . . 31.2 Eléments de dialogue homme/machine . . . . . . . . . . . . . . . . . . . . . 41.3 Transformateurs du mouvement mécanique . . . . . . . . . . . . . . . . . . 41.4 Les transmissions hydrostatiques . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Actionneurs 72.1 Généralités . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Moteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.3 Vérins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Pré-actionneurs 193.1 Préactionneurs hydrauliques et pneumatiques . . . . . . . . . . . . . . . . . 193.2 Préactionneurs électriques . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4 Capteurs 244.1 Nécessité de capteurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.2 Détecteurs de présence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3 Mesure d’une position . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 284.4 Mesure d’une vitesse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 344.5 Mesure d’une accélération . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.6 Mesure d’une déformation . . . . . . . . . . . . . . . . . . . . . . . . . . . 364.7 Mesure d’une force, d’un couple et d’une pression . . . . . . . . . . . . . . . 374.8 Mesure d’une température . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
5 Schématisation 425.1 Symboles normalisés pneumatique et hydraulique . . . . . . . . . . . . . . . 425.2 Schémas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
LYCÉE CARNOT (DIJON) MPSI - PCSI GERMAIN GONDOR
Chapitre 1
Chaînes fonctionnelles
1.1 Structure générale d’un système automatisé
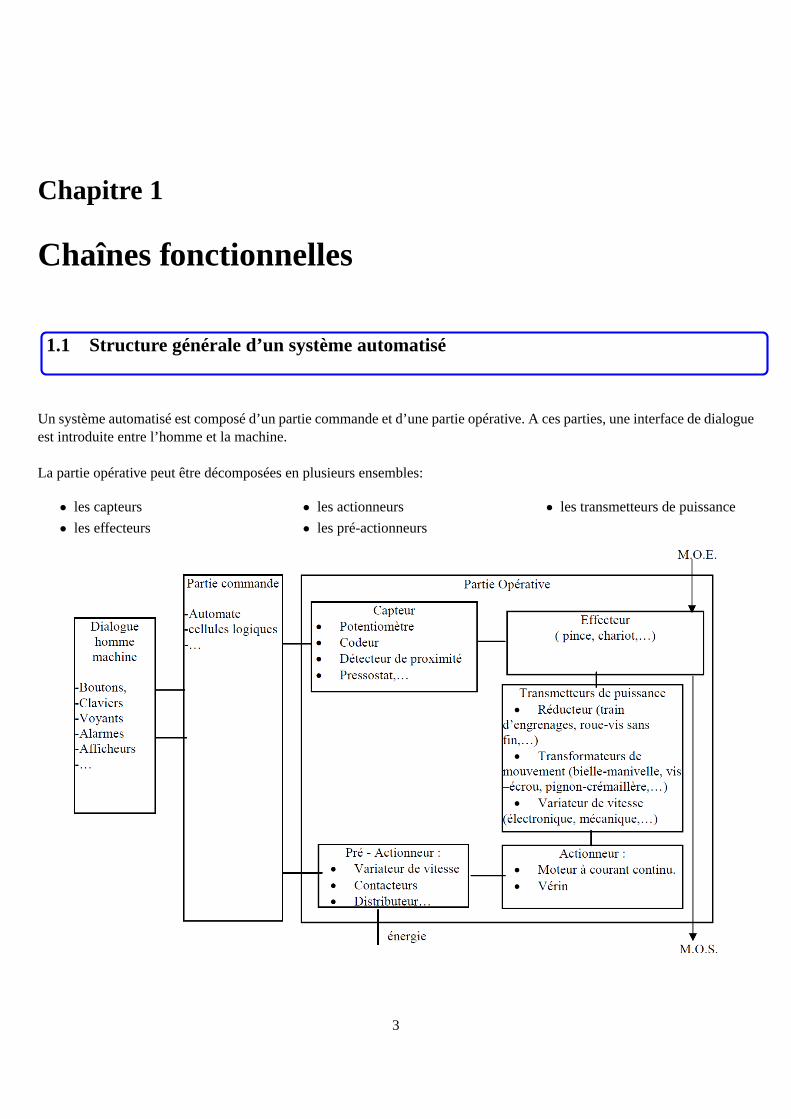
Un système automatisé est composé d’un partie commande et d’une partie opérative. A ces parties, une interface de dialogueest introduite entre l’homme et la machine.
La partie opérative peut être décomposées en plusieurs ensembles:
• les capteurs
• les effecteurs
• les actionneurs
• les pré-actionneurs
• les transmetteurs de puissance
3
4. LES TRANSMISSIONS HYDROSTATIQUES 4/48
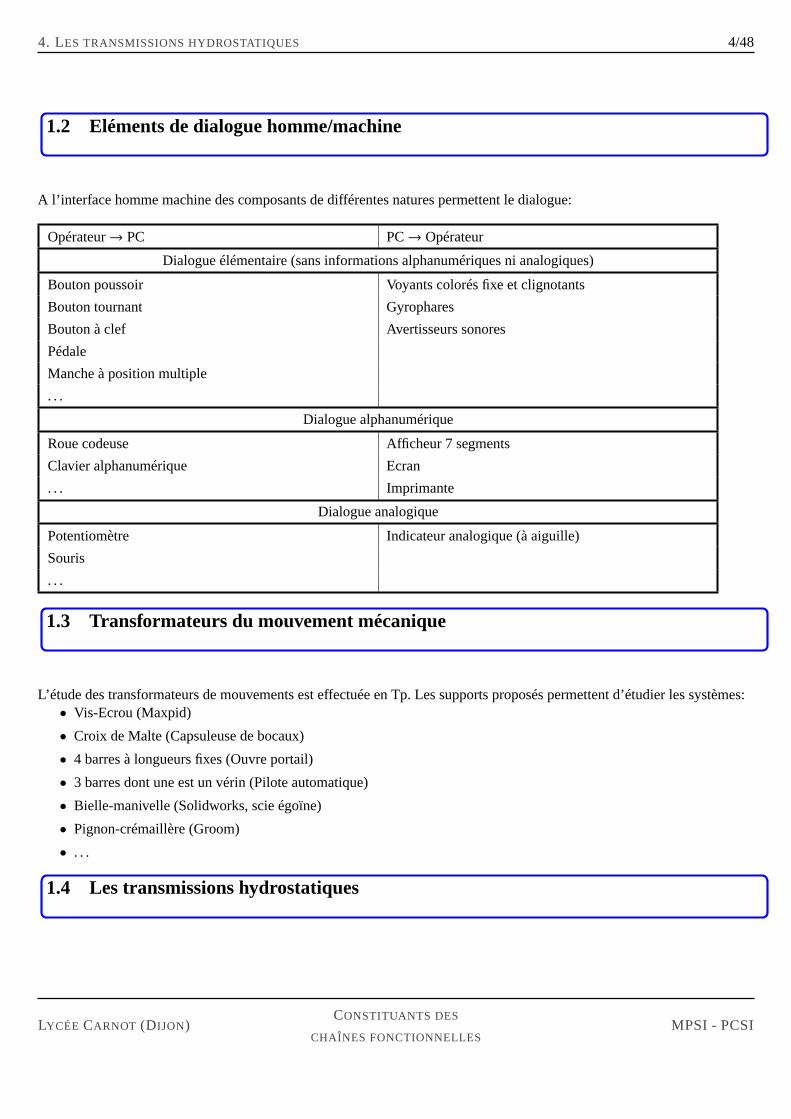
1.2 Eléments de dialogue homme/machine
A l’interface homme machine des composants de différentes natures permettent le dialogue:
Opérateur→ PC PC→ Opérateur
Dialogue élémentaire (sans informations alphanumériques ni analogiques)
Bouton poussoir Voyants colorés fixe et clignotants
Bouton tournant Gyrophares
Bouton à clef Avertisseurs sonores
Pédale
Manche à position multiple
. . .
Dialogue alphanumérique
Roue codeuse Afficheur 7 segments
Clavier alphanumérique Ecran
. . . Imprimante
Dialogue analogique
Potentiomètre Indicateur analogique (à aiguille)
Souris
. . .
1.3 Transformateurs du mouvement mécanique
L’étude des transformateurs de mouvements est effectuée en Tp. Les supports proposés permettent d’étudier les systèmes:• Vis-Ecrou (Maxpid)
• Croix de Malte (Capsuleuse de bocaux)
• 4 barres à longueurs fixes (Ouvre portail)
• 3 barres dont une est un vérin (Pilote automatique)
• Bielle-manivelle (Solidworks, scie égoïne)
• Pignon-crémaillère (Groom)
• . . .
1.4 Les transmissions hydrostatiques
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
4. LES TRANSMISSIONS HYDROSTATIQUES 5/48
1.4.1 Introduction
Il existe différents types de transmissions hydrauliques :• les transmissions hydrocinétiquescaractérisées par de faibles pressions (environ 1 bar) mais des vitesses de fluide
très élevées (100 m.s−1) : nous ne les étudierons pas.
• les transmissions hydrostatiquescaractérisées par de fortes pressions de fluide ( de l’ordre de 300 à 1000 bar) et defaibles vitesses (< 5 m.s−1).
1.4.2 Structure d’une transmission hydrostatique
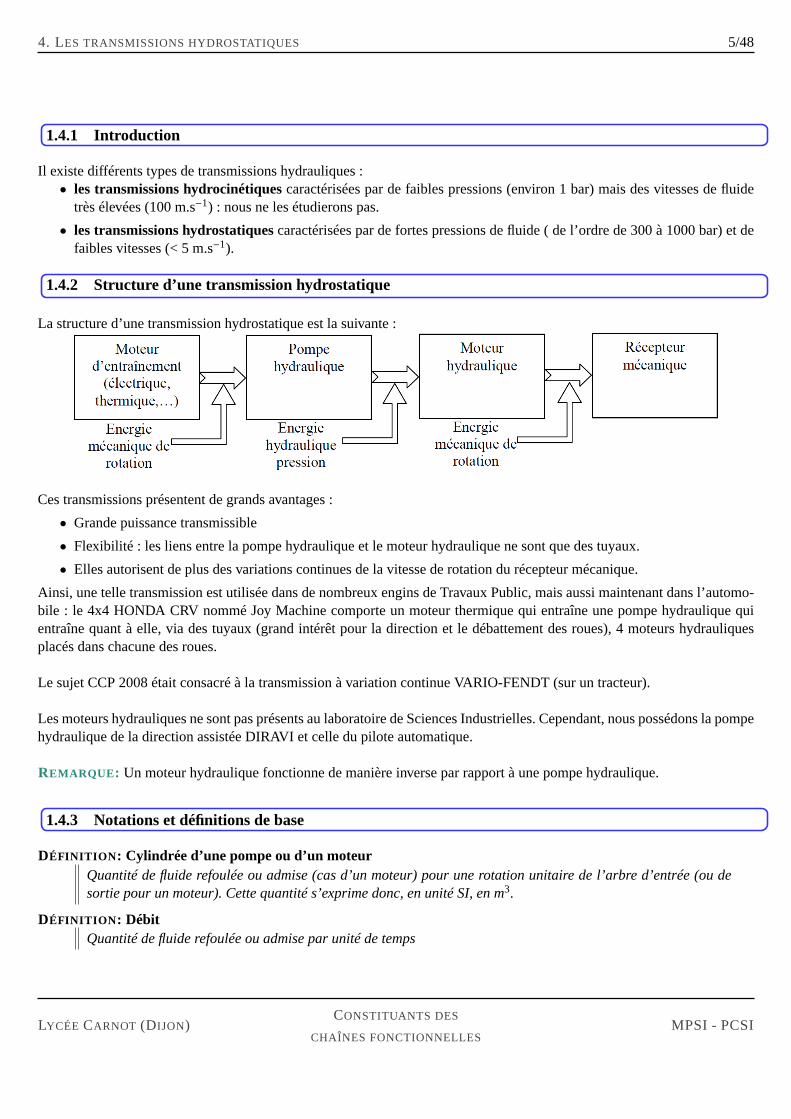
La structure d’une transmission hydrostatique est la suivante :
Ces transmissions présentent de grands avantages :
• Grande puissance transmissible
• Flexibilité : les liens entre la pompe hydraulique et le moteur hydraulique ne sontque des tuyaux.
• Elles autorisent de plus des variations continues de la vitesse de rotation du récepteur mécanique.
Ainsi, une telle transmission est utilisée dans de nombreux engins de TravauxPublic, mais aussi maintenant dans l’automo-bile : le 4x4 HONDA CRV nommé Joy Machine comporte un moteur thermique qui entraîne une pompe hydraulique quientraîne quant à elle, via des tuyaux (grand intérêt pour la direction et le débattement des roues), 4 moteurs hydrauliquesplacés dans chacune des roues.
Le sujet CCP 2008 était consacré à la transmission à variation continue VARIO-FENDT (sur un tracteur).
Les moteurs hydrauliques ne sont pas présents au laboratoire de Sciences Industrielles. Cependant, nous possédons la pompehydraulique de la direction assistée DIRAVI et celle du pilote automatique.
REMARQUE : Un moteur hydraulique fonctionne de manière inverse par rapport à une pompe hydraulique.
1.4.3 Notations et définitions de base
DÉFINITION : Cylindrée d’une pompe ou d’un moteurQuantité de fluide refoulée ou admise (cas d’un moteur) pour une rotation unitaire de l’arbre d’entrée (ou desortie pour un moteur). Cette quantité s’exprime donc, en unité SI, en m3.
DÉFINITION : DébitQuantité de fluide refoulée ou admise par unité de temps
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
4. LES TRANSMISSIONS HYDROSTATIQUES 6/48
Le débit est aussi le produit de la cylindrée par la vitesse derotation :
Q = V.ω avec
Q débit en m3/s
V cylindrée en m3/rad
ω vitesse de rotation rad/s
DÉFINITION : CoupleForce mécanique de rotation pure.
RAPPEL Soit une force#»
F appliquée au pointP. Le moment#»
M(O,# »
FP) de la force#»
F appliquée au pointP est:
#»
M(O,# »
FP) =# »
OP∧#»
F
La puissance mécaniqueP en entrée de la pompe est donnée par:
P = C.ω avec
P puissance en W
C couple exercé par le moteur d’entrainement sur la pompe en N.m
ω vitesse de rotation de la pompe rad/s
La puissance mécanique est aussi égale au produit du débitQ par la différence de pression∆P.
Nous avons donc Q.∆P = C.ω avec Q = V.ω d’où C = V.∆P
1.4.4 Relations fondamentales
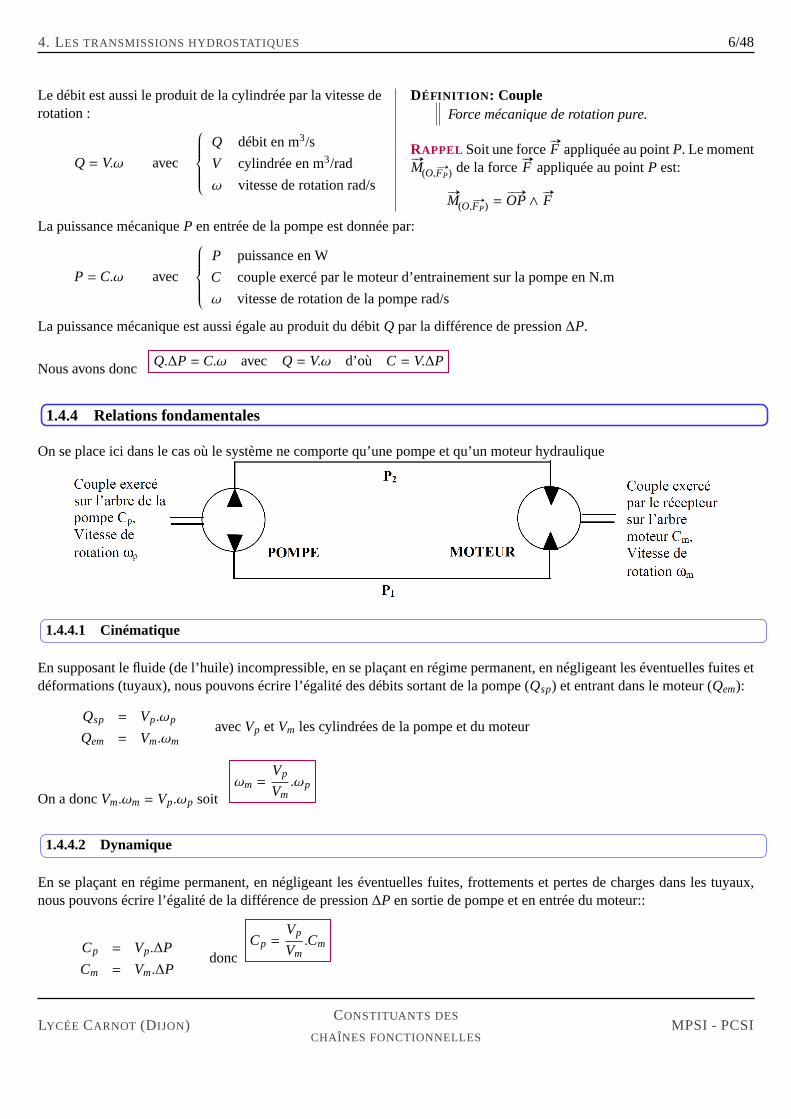
On se place ici dans le cas où le système ne comporte qu’une pompe et qu’unmoteur hydraulique
1.4.4.1 Cinématique
En supposant le fluide (de l’huile) incompressible, en se plaçant en régimepermanent, en négligeant les éventuelles fuites etdéformations (tuyaux), nous pouvons écrire l’égalité des débits sortantde la pompe (Qsp) et entrant dans le moteur (Qem):
Qsp = Vp.ωp
Qem = Vm.ωmavecVp etVm les cylindrées de la pompe et du moteur
On a doncVm.ωm = Vp.ωp soitωm =
Vp
Vm.ωp
1.4.4.2 Dynamique
En se plaçant en régime permanent, en négligeant les éventuelles fuites, frottements et pertes de charges dans les tuyaux,nous pouvons écrire l’égalité de la différence de pression∆P en sortie de pompe et en entrée du moteur::
Cp = Vp.∆P
Cm = Vm.∆Pdonc
Cp =Vp
Vm.Cm
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
Chapitre 2
Actionneurs
2.1 Généralités
2.1.1 Fonction globale d’un actionneur
La fonction globale d’un actionneur est de convertir une énergie d’entrée disponible sous une certaine forme en une énergiede sortie utilisable pour obtenir un effet donné.
Un actionneurtransforme donc lanature de l’énergie
2.1.2 Rendement d’un actionneur
La conversion d’une énergie produit toujours, outre la forme d’énergie recherchée (que l’on qualifie d’énergie utile), une ouplusieurs formes secondaires d’énergie. Le rendementη d’un actionneur correspond au rapport entre l’énergie utile de sortierecueillie pendant un intervalle de temps donné et l’énergie entrée pendant le même intervalle de temps:
η =énergie utile de sortie
énergie d’entréeEXEMPLE : Moteur électrique
Dans un moteur électrique asynchrone, une fraction de l’énergie électrique d’entrée est dissipée sous forme thermique dansles bobinages. Le rendement correspond au rapport entre l’énergiemécanique disponible sur l’arbre de sortie et l’énergieélectrique fournie. Il a pour valeur de 0,8 à 0,95 selon le type de moteur.
2.1.3 Classification générale des actionneurs
Une classification générale des actionneurs peut être effectuée à partirde leur fonction globale, c’est à dire de leur mode deconversion d’énergie réalisée dans l’actionneur. On prend donc en compte pour établir cette classification:• la forme de l’énergie d’entrée de l’actionneur
• la forme de l’énergie de sortie de l’actionneur
Les familles d’actionneurs les plus couramment utilisées en construction mécanique se distinguent en deux groupes:
• les actionneurs qui assurent la transformation d’énergie électrique en énergie mécanique: moteur électriques, elec-troaimants
7
2. MOTEURS 8/48
• les actionneurs qui assurent la transformation d’une forme d’énergie mécanique en une autre forme d’énergie méca-nique. Ces actionneurs sont généralement désignés par le terme d’actionneurs mécaniques.
2.2 Moteurs
Le terme général de moteur englobe les actionneurs mécaniques, les actionneurs électromécaniques (moteurs électriques),les actionneurs thermo-mécaniques (turbines à gaz) et chimio-mécaniques (moteurs à combustion interne), c’est à dire tousles actionneurs dont l’énergie de sortie est une énergie mécanique.
2.2.1 Moteurs électriques
2.2.1.1 Fonction globale
La fonction global d’un moteur électrique est de convertir une énergie électrique (U.I avecU la tension etI l’intensité) enénergie mécanique de rotation (C.ω avecC le couple etω la vitesse de rotation).
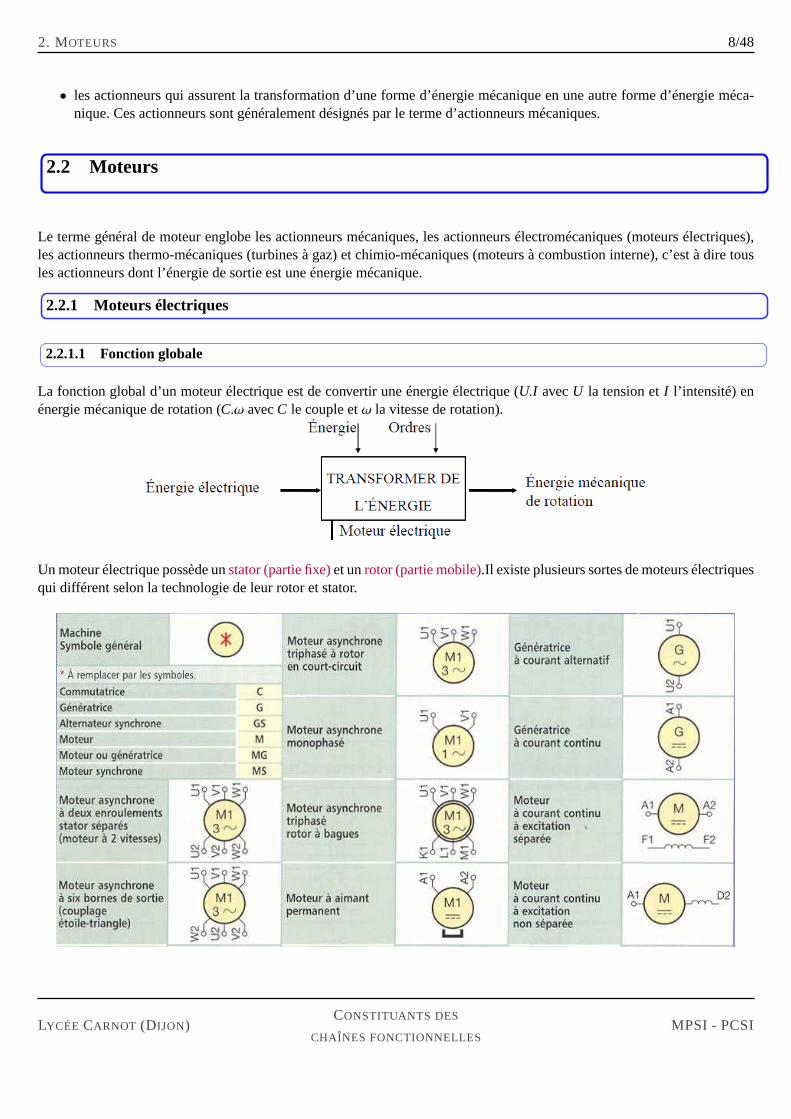
Un moteur électrique possède unstator (partie fixe)et unrotor (partie mobile).Il existe plusieurs sortes de moteurs électriquesqui différent selon la technologie de leur rotor et stator.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. MOTEURS 9/48
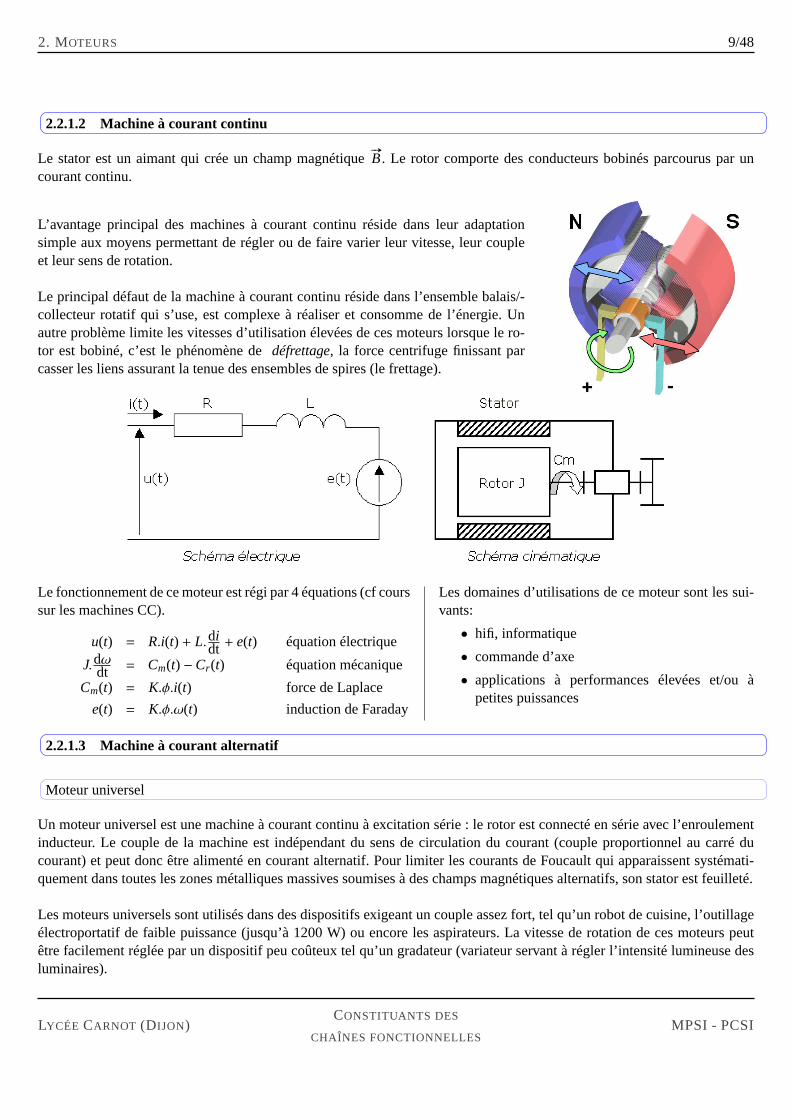
2.2.1.2 Machine à courant continu
Le stator est un aimant qui crée un champ magnétique#»
B. Le rotor comporte des conducteurs bobinés parcourus par uncourant continu.
L’avantage principal des machines à courant continu réside dans leur adaptationsimple aux moyens permettant de régler ou de faire varier leur vitesse, leur coupleet leur sens de rotation.
Le principal défaut de la machine à courant continu réside dans l’ensemble balais/-collecteur rotatif qui s’use, est complexe à réaliser et consomme de l’énergie. Unautre problème limite les vitesses d’utilisation élevées de ces moteurs lorsque le ro-tor est bobiné, c’est le phénomène dedéfrettage, la force centrifuge finissant parcasser les liens assurant la tenue des ensembles de spires (le frettage).
Le fonctionnement de ce moteur est régi par 4 équations (cf courssur les machines CC).
u(t) = R.i(t) + L.didt + e(t) équation électrique
J.dωdt = Cm(t) −Cr (t) équation mécanique
Cm(t) = K.φ.i(t) force de Laplace
e(t) = K.φ.ω(t) induction de Faraday
Les domaines d’utilisations de ce moteur sont les sui-vants:
• hifi, informatique
• commande d’axe
• applications à performances élevées et/ou àpetites puissances
2.2.1.3 Machine à courant alternatif
Moteur universel
Un moteur universel est une machine à courant continu à excitation série :le rotor est connecté en série avec l’enroulementinducteur. Le couple de la machine est indépendant du sens de circulationdu courant (couple proportionnel au carré ducourant) et peut donc être alimenté en courant alternatif. Pour limiter les courants de Foucault qui apparaissent systémati-quement dans toutes les zones métalliques massives soumises à des champs magnétiques alternatifs, son stator est feuilleté.
Les moteurs universels sont utilisés dans des dispositifs exigeant un couple assez fort, tel qu’un robot de cuisine, l’outillageélectroportatif de faible puissance (jusqu’à 1200 W) ou encore les aspirateurs. La vitesse de rotation de ces moteurs peutêtre facilement réglée par un dispositif peu coûteux tel qu’un gradateur (variateur servant à régler l’intensité lumineuse desluminaires).
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. MOTEURS 10/48
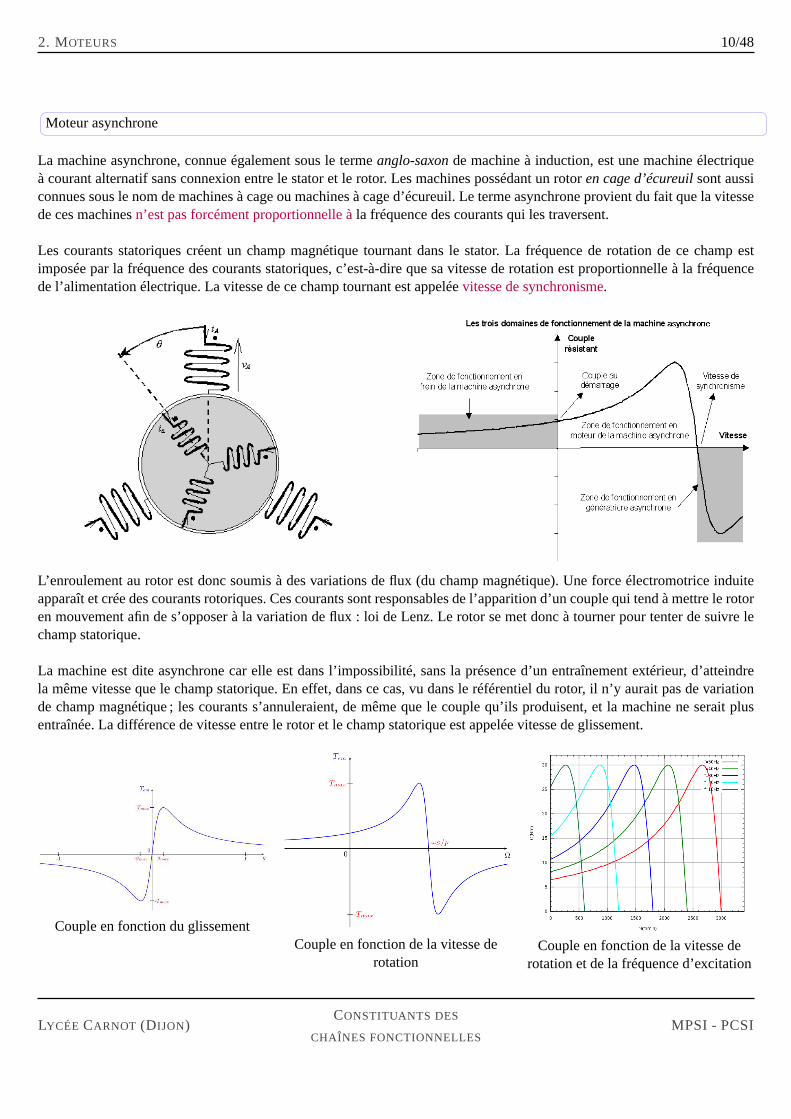
Moteur asynchrone
La machine asynchrone, connue également sous le termeanglo-saxonde machine à induction, est une machine électriqueà courant alternatif sans connexion entre le stator et le rotor. Les machines possédant un rotoren cage d’écureuilsont aussiconnues sous le nom de machines à cage ou machines à cage d’écureuil. Le terme asynchrone provient du fait que la vitessede ces machinesn’est pas forcément proportionnelle àla fréquence des courants qui les traversent.
Les courants statoriques créent un champ magnétique tournant dans le stator. La fréquence de rotation de ce champ estimposée par la fréquence des courants statoriques, c’est-à-dire que sa vitesse de rotation est proportionnelle à la fréquencede l’alimentation électrique. La vitesse de ce champ tournant est appeléevitesse de synchronisme.
L’enroulement au rotor est donc soumis à des variations de flux (du champmagnétique). Une force électromotrice induiteapparaît et crée des courants rotoriques. Ces courants sont responsables de l’apparition d’un couple qui tend à mettre le rotoren mouvement afin de s’opposer à la variation de flux : loi de Lenz. Le rotor se met donc à tourner pour tenter de suivre lechamp statorique.
La machine est dite asynchrone car elle est dans l’impossibilité, sans la présence d’un entraînement extérieur, d’atteindrela même vitesse que le champ statorique. En effet, dans ce cas, vu dans le référentiel du rotor, il n’y aurait pas de variationde champ magnétique ; les courants s’annuleraient, de même que le couple qu’ils produisent, et la machine ne serait plusentraînée. La différence de vitesse entre le rotor et le champ statorique est appelée vitesse de glissement.
Couple en fonction du glissementCouple en fonction de la vitesse de
rotationCouple en fonction de la vitesse de
rotation et de la fréquence d’excitation
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. MOTEURS 11/48
Lorsqu’il est entraîné au-delà de la vitesse de synchronisme - fonctionnement hypersynchrone - la machine fonctionne engénérateur alternatif. Mais son stator doit être forcément relié au réseaucar lui seul peut créer le champ magnétique néces-saire pour faire apparaître les courants rotoriques.
Moteur synchrone
Les courants du stator créent un champ magnétique tournant dans le stator. Sa fréquencede rotation (sa vitesse) est proportionnelle à la fréquence de l’alimentation électrique. Lavitesse de ce champ tournant est appeléevitesse de synchronisme.
Le rotor, souvent appelé roue polaire, est alimenté par une source continue ou auto induite(spire en court-circuit). Il peut aussi être constitué d’aimants permanents, le rotor n’a alorsplus besoin d’alimentation.
Le champ magnétique du rotor créé cherche en permanence à s’aligner sur celui du stator.C’est le principe de la boussole (qui voit elle par contre un champ magnétique fixe). Cettemachine est dite synchrone : le champ du rotor ne peut que tourner à la même vitesse quele champ du stator.
Une machine synchrone est une machine électrique possédant deux modes de fonctionnement:• fonctionnement générateur :Elle produit un courant électrique dont la fréquence est déterminée par lavitesse de
rotation de la machine
• fonctionnement moteur : Elle absorbe un courant électrique dont la fréquence détermine la vitessede rotation de lamachine
Au-delà de quelques kilowatts, les machines synchrones sont généralement des machines triphasées. Les alternateurs sontdes machines synchrones fonctionnant en génératrice.
Les machines synchrones sont également utilisées dans les systèmes de traction (tel le TGV). Ces machines sont associées àdes onduleurs de courants, ce qui permet de fixer le couple moteur moyenconstant avec un minimum de courant. On parled’autopilotage (asservissement des courants statoriques par rapportà la position du rotor).
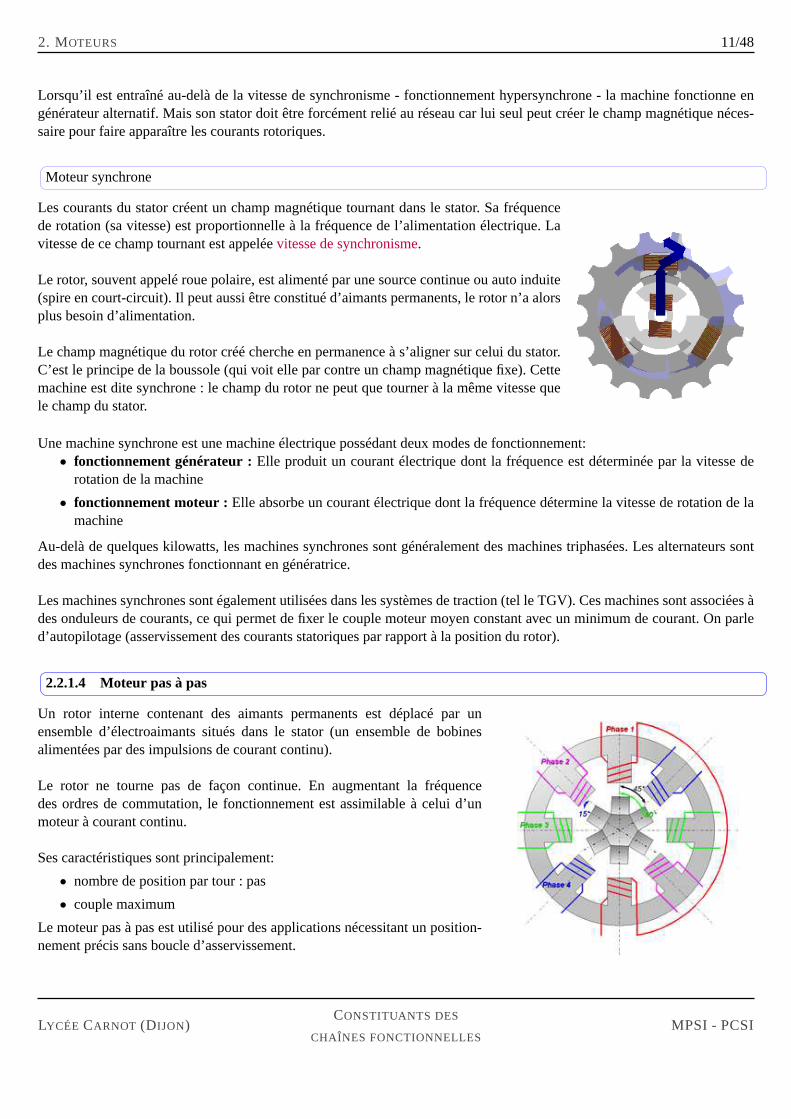
2.2.1.4 Moteur pas à pas
Un rotor interne contenant des aimants permanents est déplacé par unensemble d’électroaimants situés dans le stator (un ensemble de bobinesalimentées par des impulsions de courant continu).
Le rotor ne tourne pas de façon continue. En augmentant la fréquencedes ordres de commutation, le fonctionnement est assimilable à celui d’unmoteur à courant continu.
Ses caractéristiques sont principalement:
• nombre de position par tour : pas
• couple maximum
Le moteur pas à pas est utilisé pour des applications nécessitant un position-nement précis sans boucle d’asservissement.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. MOTEURS 12/48
Pas 1 Pas 2 Pas 3 Pas 4
Pas 5 Pas 6 Pas 7 Pas 8
2.2.2 Moteurs thermiques
2.2.2.1 Fonction globale
La fonction global d’un moteur thermique est de convertir une énergie chimique (∆H chaleur de réaction etn, nombre demole) en énergie mécanique de rotation (C.ω avecC le couple etω la vitesse).
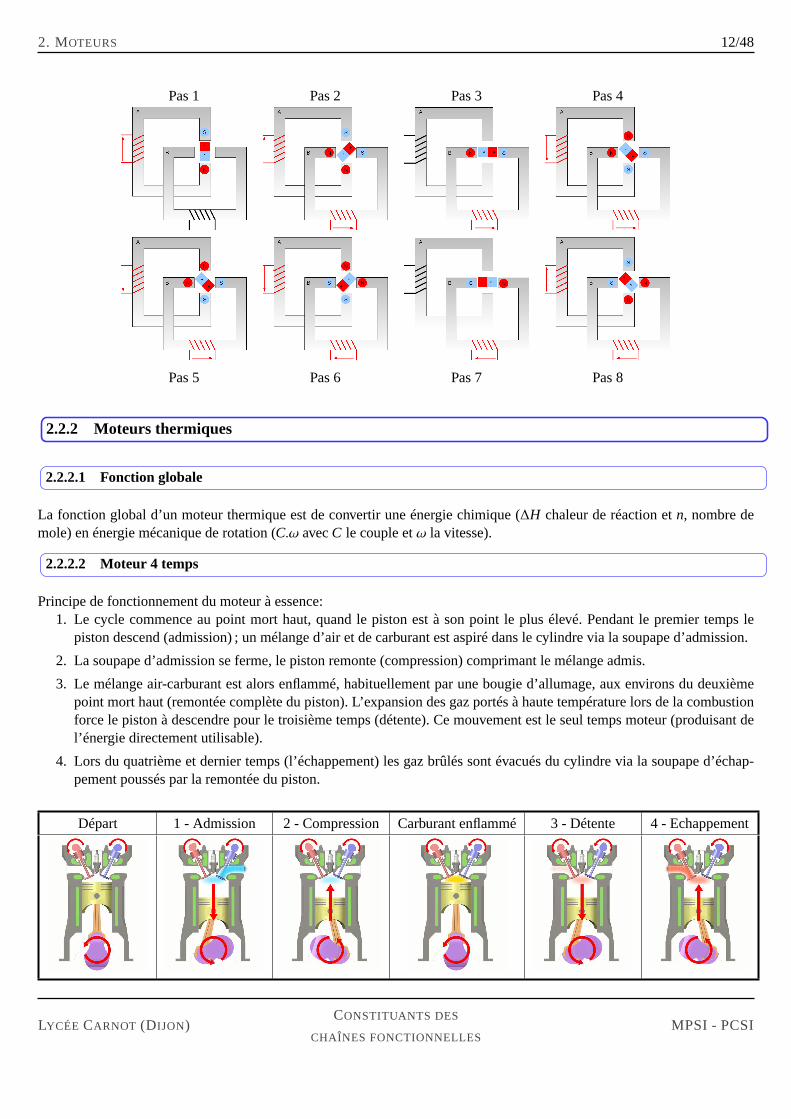
2.2.2.2 Moteur 4 temps
Principe de fonctionnement du moteur à essence:1. Le cycle commence au point mort haut, quand le piston est à son point le plus élevé. Pendant le premier temps le
piston descend (admission) ; un mélange d’air et de carburant est aspiré dans le cylindre via la soupape d’admission.
2. La soupape d’admission se ferme, le piston remonte (compression) comprimant le mélange admis.
3. Le mélange air-carburant est alors enflammé, habituellement par une bougie d’allumage, aux environs du deuxièmepoint mort haut (remontée complète du piston). L’expansion des gaz portés à haute température lors de la combustionforce le piston à descendre pour le troisième temps (détente). Ce mouvement est le seul temps moteur (produisant del’énergie directement utilisable).
4. Lors du quatrième et dernier temps (l’échappement) les gaz brûlés sontévacués du cylindre via la soupape d’échap-pement poussés par la remontée du piston.
Départ 1 - Admission 2 - Compression Carburant enflammé 3 - Détente 4 - Echappement
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. MOTEURS 13/48
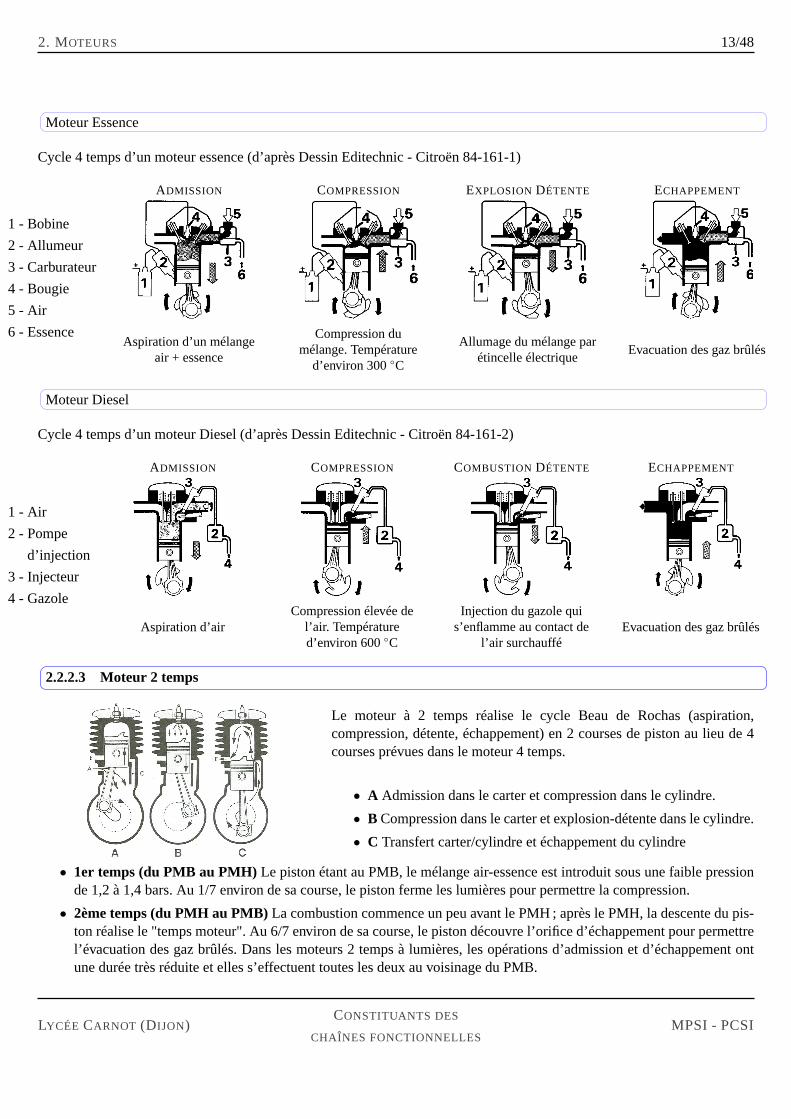
Moteur Essence
Cycle 4 temps d’un moteur essence (d’après Dessin Editechnic - Citroën 84-161-1)
1 - Bobine
2 - Allumeur
3 - Carburateur
4 - Bougie
5 - Air
6 - Essence
ADMISSION COMPRESSION EXPLOSION DÉTENTE ECHAPPEMENT
Aspiration d’un mélangeair + essence
Compression dumélange. Température
d’environ 300C
Allumage du mélange parétincelle électrique
Evacuation des gaz brûlés
Moteur Diesel
Cycle 4 temps d’un moteur Diesel (d’après Dessin Editechnic - Citroën 84-161-2)
1 - Air
2 - Pompe
d’injection
3 - Injecteur
4 - Gazole
ADMISSION COMPRESSION COMBUSTION DÉTENTE ECHAPPEMENT
Aspiration d’airCompression élevée de
l’air. Températured’environ 600C
Injection du gazole quis’enflamme au contact de
l’air surchaufféEvacuation des gaz brûlés
2.2.2.3 Moteur 2 temps
Le moteur à 2 temps réalise le cycle Beau de Rochas (aspiration,compression, détente, échappement) en 2 courses de piston au lieu de 4courses prévues dans le moteur 4 temps.
• A Admission dans le carter et compression dans le cylindre.
• B Compression dans le carter et explosion-détente dans le cylindre.
• C Transfert carter/cylindre et échappement du cylindre
• 1er temps (du PMB au PMH) Le piston étant au PMB, le mélange air-essence est introduit sous une faible pressionde 1,2 à 1,4 bars. Au 1/7 environ de sa course, le piston ferme les lumières pour permettre la compression.
• 2ème temps (du PMH au PMB)La combustion commence un peu avant le PMH ; après le PMH, la descente du pis-ton réalise le "temps moteur". Au 6/7 environ de sa course, le piston découvre l’orifice d’échappement pour permettrel’évacuation des gaz brûlés. Dans les moteurs 2 temps à lumières, les opérations d’admission et d’échappement ontune durée très réduite et elles s’effectuent toutes les deux au voisinagedu PMB.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. MOTEURS 14/48
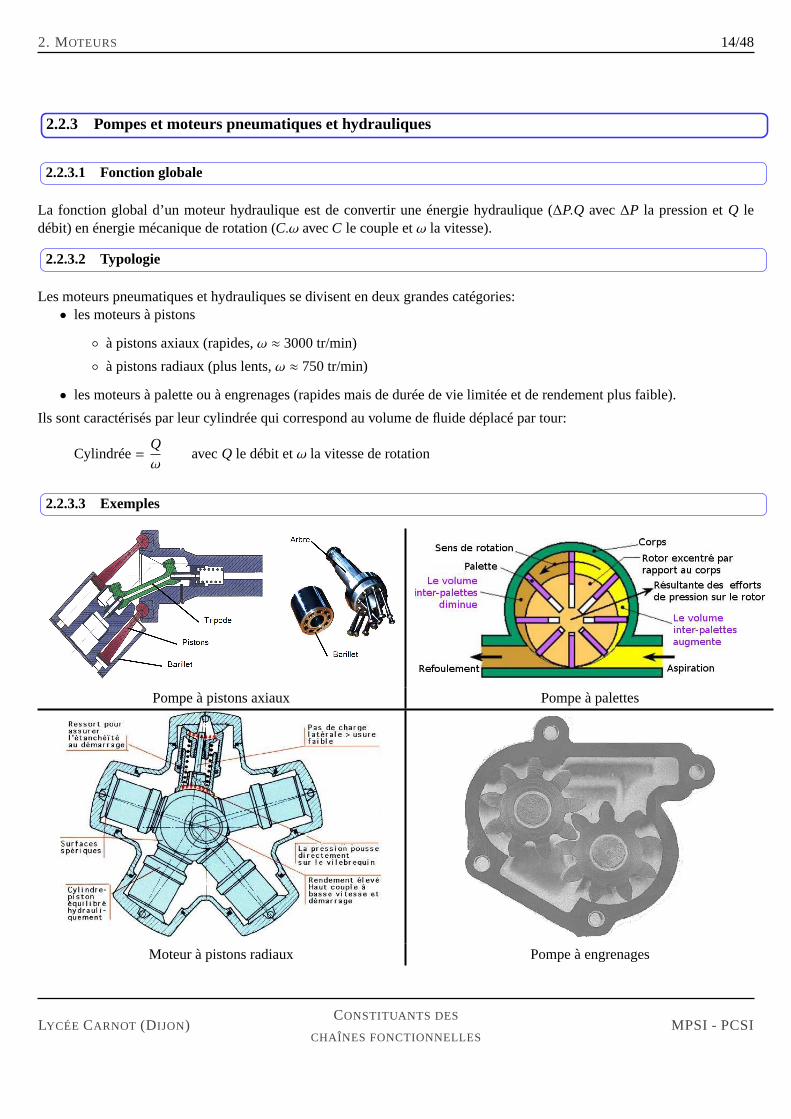
2.2.3 Pompes et moteurs pneumatiques et hydrauliques
2.2.3.1 Fonction globale
La fonction global d’un moteur hydraulique est de convertir une énergiehydraulique (∆P.Q avec∆P la pression etQ ledébit) en énergie mécanique de rotation (C.ω avecC le couple etω la vitesse).
2.2.3.2 Typologie
Les moteurs pneumatiques et hydrauliques se divisent en deux grandescatégories:• les moteurs à pistons
à pistons axiaux (rapides,ω ≈ 3000 tr/min)
à pistons radiaux (plus lents,ω ≈ 750 tr/min)
• les moteurs à palette ou à engrenages (rapides mais de durée de vie limitée et derendement plus faible).
Ils sont caractérisés par leur cylindrée qui correspond au volume de fluide déplacé par tour:
Cylindrée=Qω
avecQ le débit etω la vitesse de rotation
2.2.3.3 Exemples
Pompe à pistons axiaux Pompe à palettes
Moteur à pistons radiaux Pompe à engrenages
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
3. VÉRINS 15/48
2.3 Vérins
2.3.1 Vérins électriques
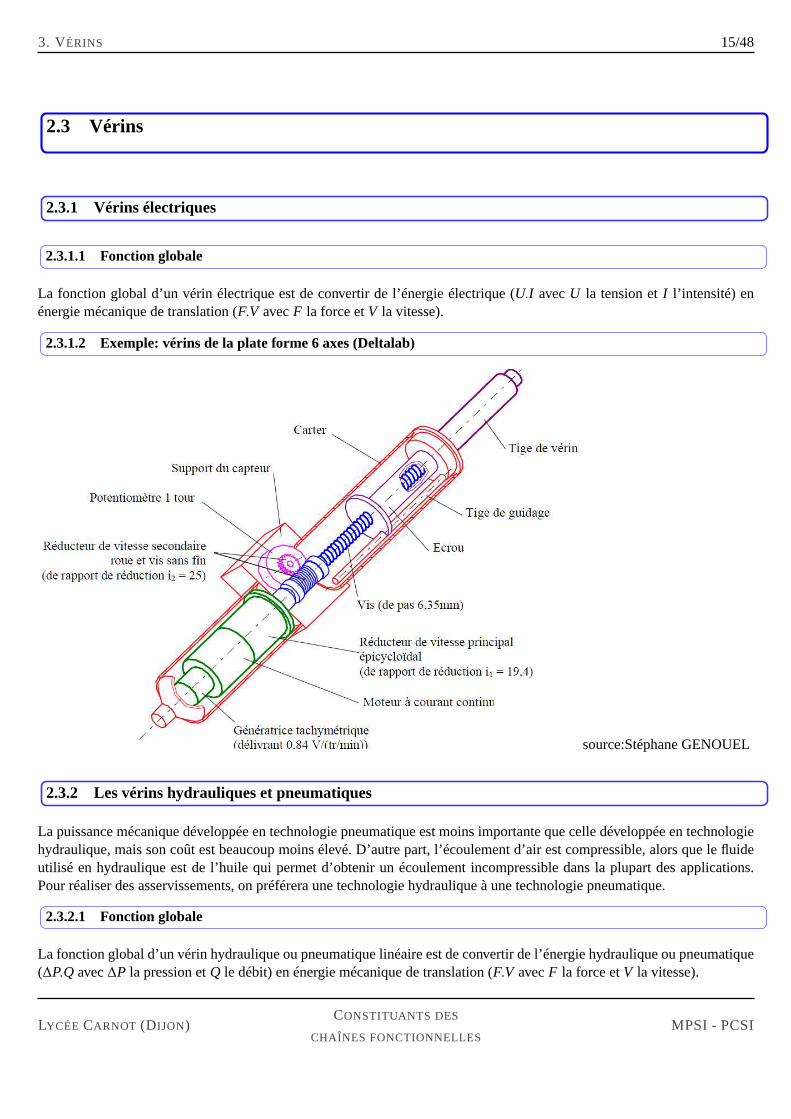
2.3.1.1 Fonction globale
La fonction global d’un vérin électrique est de convertir de l’énergie électrique (U.I avecU la tension etI l’intensité) enénergie mécanique de translation (F.V avecF la force etV la vitesse).
2.3.1.2 Exemple: vérins de la plate forme 6 axes (Deltalab)
source:Stéphane GENOUEL
2.3.2 Les vérins hydrauliques et pneumatiques
La puissance mécanique développée en technologie pneumatique est moins importante que celle développée en technologiehydraulique, mais son coût est beaucoup moins élevé. D’autre part, l’écoulement d’air est compressible, alors que le fluideutilisé en hydraulique est de l’huile qui permet d’obtenir un écoulement incompressible dans la plupart des applications.Pour réaliser des asservissements, on préférera une technologie hydraulique à une technologie pneumatique.
2.3.2.1 Fonction globale
La fonction global d’un vérin hydraulique ou pneumatique linéaire est de convertir de l’énergie hydraulique ou pneumatique(∆P.Q avec∆P la pression etQ le débit) en énergie mécanique de translation (F.V avecF la force etV la vitesse).
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
3. VÉRINS 16/48
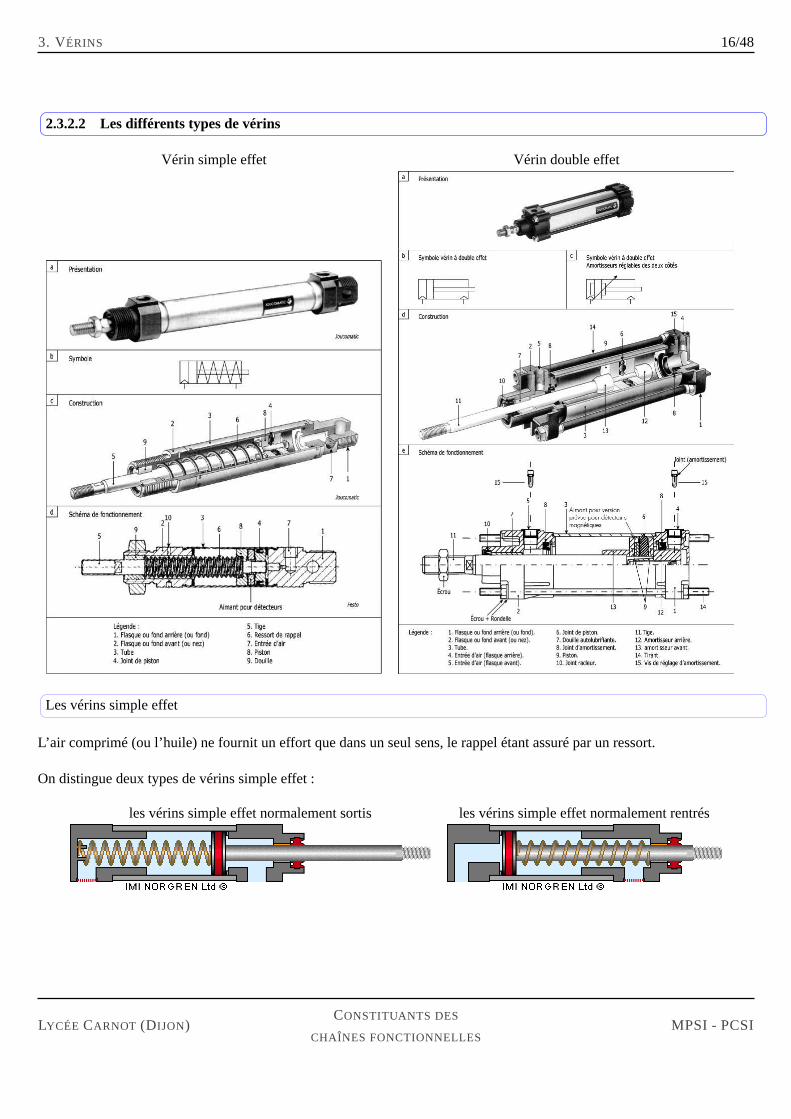
2.3.2.2 Les différents types de vérins
Vérin simple effet Vérin double effet
Les vérins simple effet
L’air comprimé (ou l’huile) ne fournit un effort que dans un seul sens,le rappel étant assuré par un ressort.
On distingue deux types de vérins simple effet :
les vérins simple effet normalement sortis les vérins simple effet normalement rentrés
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
3. VÉRINS 17/48
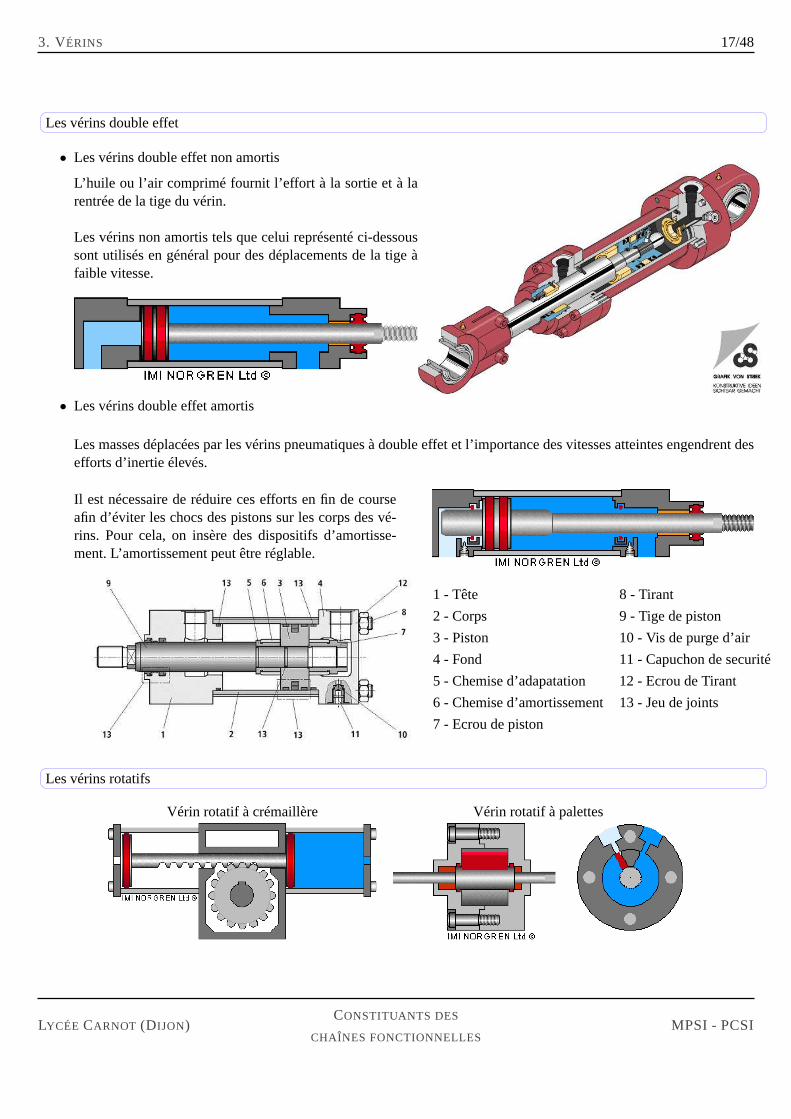
Les vérins double effet
• Les vérins double effet non amortis
L’huile ou l’air comprimé fournit l’effort à la sortie et à larentrée de la tige du vérin.
Les vérins non amortis tels que celui représenté ci-dessoussont utilisés en général pour des déplacements de la tige àfaible vitesse.
• Les vérins double effet amortis
Les masses déplacées par les vérins pneumatiques à double effet et l’importance des vitesses atteintes engendrent desefforts d’inertie élevés.
Il est nécessaire de réduire ces efforts en fin de courseafin d’éviter les chocs des pistons sur les corps des vé-rins. Pour cela, on insère des dispositifs d’amortisse-ment. L’amortissement peut être réglable.
1 - Tête 8 - Tirant
2 - Corps 9 - Tige de piston
3 - Piston 10 - Vis de purge d’air
4 - Fond 11 - Capuchon de securité
5 - Chemise d’adapatation 12 - Ecrou de Tirant
6 - Chemise d’amortissement 13 - Jeu de joints
7 - Ecrou de piston
Les vérins rotatifs
Vérin rotatif à crémaillère Vérin rotatif à palettes
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
3. VÉRINS 18/48
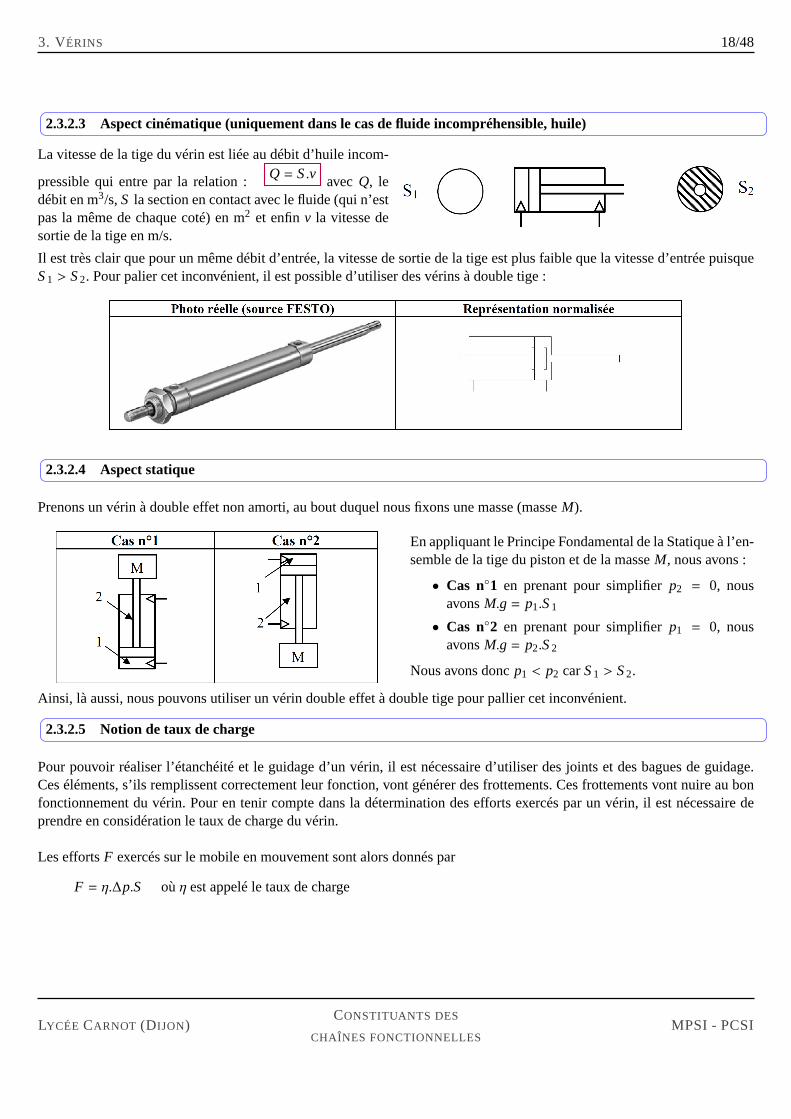
2.3.2.3 Aspect cinématique (uniquement dans le cas de fluide incompréhensible, huile)
La vitesse de la tige du vérin est liée au débit d’huile incom-
pressible qui entre par la relation : Q = S.v avecQ, ledébit en m3/s,S la section en contact avec le fluide (qui n’estpas la même de chaque coté) en m2 et enfinv la vitesse desortie de la tige en m/s.
Il est très clair que pour un même débit d’entrée, la vitesse de sortie de la tigeest plus faible que la vitesse d’entrée puisqueS1 > S2. Pour palier cet inconvénient, il est possible d’utiliser des vérins à double tige :
2.3.2.4 Aspect statique
Prenons un vérin à double effet non amorti, au bout duquel nous fixons une masse (masseM).
En appliquant le Principe Fondamental de la Statique à l’en-semble de la tige du piston et de la masseM, nous avons :
• Cas n1 en prenant pour simplifierp2 = 0, nousavonsM.g = p1.S1
• Cas n2 en prenant pour simplifierp1 = 0, nousavonsM.g = p2.S2
Nous avons doncp1 < p2 carS1 > S2.
Ainsi, là aussi, nous pouvons utiliser un vérin double effet à double tige pour pallier cet inconvénient.
2.3.2.5 Notion de taux de charge
Pour pouvoir réaliser l’étanchéité et le guidage d’un vérin, il est nécessaire d’utiliser des joints et des bagues de guidage.Ces éléments, s’ils remplissent correctement leur fonction, vont générerdes frottements. Ces frottements vont nuire au bonfonctionnement du vérin. Pour en tenir compte dans la détermination des efforts exercés par un vérin, il est nécessaire deprendre en considération le taux de charge du vérin.
Les effortsF exercés sur le mobile en mouvement sont alors donnés par
F = η.∆p.S oùη est appelé le taux de charge
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
Chapitre 3
Pré-actionneurs
Les préactionneurs font partie de la chaîne d’action d’un système automatisé. Les préactionneurs sont les interfaces entrela Partie Commande et la Partie Opérative. Ils distribuent, sur ordre de la Partie Commande, l’énergie de puissance auxactionneurs.
3.1 Préactionneurs hydrauliques et pneumatiques
3.1.1 Distributeurs hydrauliques et pneumatiques
Pour la représentation des sources d’énergie:• Pour un distributeur pneumatique, la source d’énergie est représentéepar un triangle ou un cercle avec un point vide.
• Pour un distributeur hydraulique, la source d’énergie est représentée par un triangle plein ou un cercle avec un pointplein à l’intérieur.
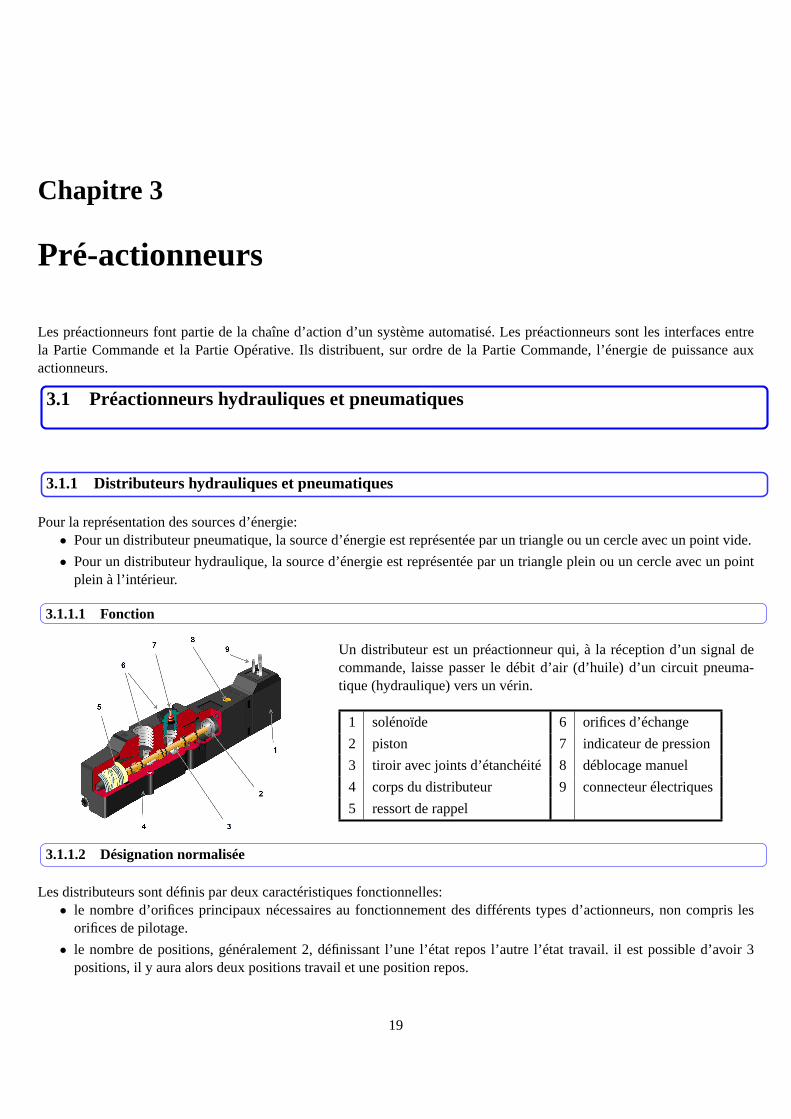
3.1.1.1 Fonction
Un distributeur est un préactionneur qui, à la réception d’un signal decommande, laisse passer le débit d’air (d’huile) d’un circuit pneuma-tique (hydraulique) vers un vérin.
1 solénoïde 6 orifices d’échange
2 piston 7 indicateur de pression
3 tiroir avec joints d’étanchéité 8 déblocage manuel
4 corps du distributeur 9 connecteur électriques
5 ressort de rappel
3.1.1.2 Désignation normalisée
Les distributeurs sont définis par deux caractéristiques fonctionnelles:• le nombre d’orifices principaux nécessaires au fonctionnement des différents types d’actionneurs, non compris les
orifices de pilotage.
• le nombre de positions, généralement 2, définissant l’une l’état repos l’autre l’état travail. il est possible d’avoir 3positions, il y aura alors deux positions travail et une position repos.
19
1. PRÉACTIONNEURS HYDRAULIQUES ET PNEUMATIQUES 20/48
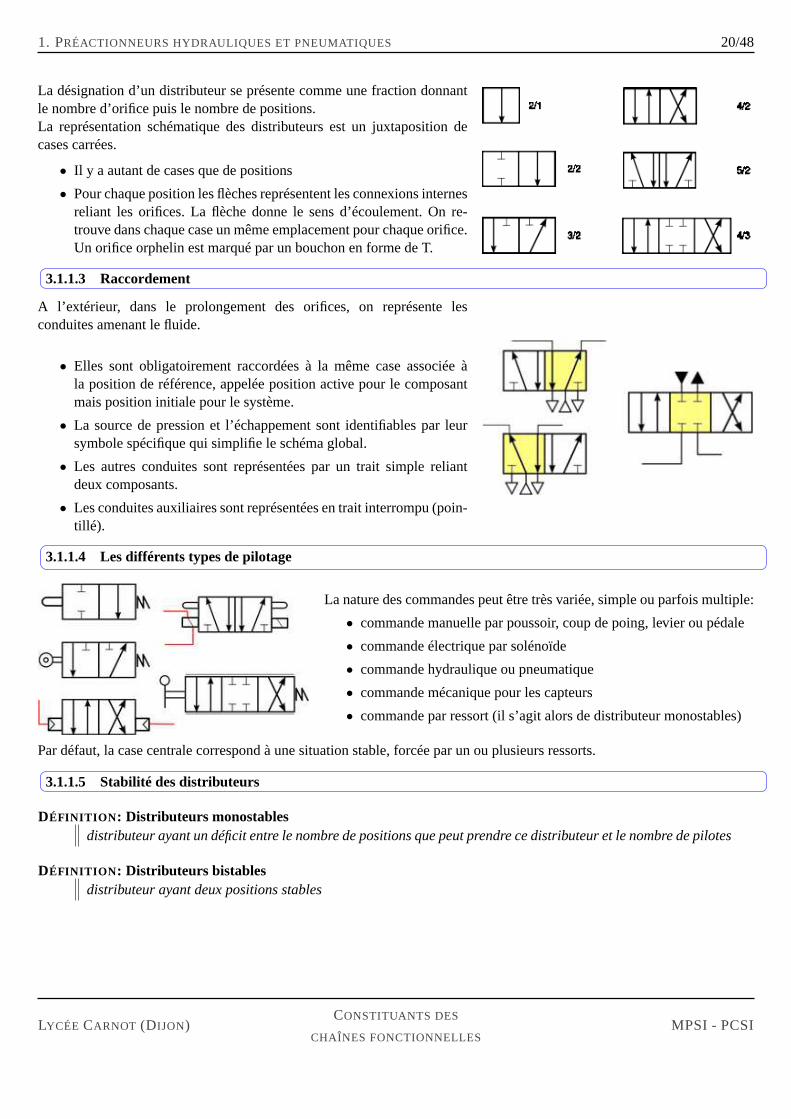
La désignation d’un distributeur se présente comme une fraction donnantle nombre d’orifice puis le nombre de positions.La représentation schématique des distributeurs est un juxtaposition decases carrées.
• Il y a autant de cases que de positions
• Pour chaque position les flèches représentent les connexions internesreliant les orifices. La flèche donne le sens d’écoulement. On re-trouve dans chaque case un même emplacement pour chaque orifice.Un orifice orphelin est marqué par un bouchon en forme de T.
3.1.1.3 Raccordement
A l’extérieur, dans le prolongement des orifices, on représente lesconduites amenant le fluide.
• Elles sont obligatoirement raccordées à la même case associée àla position de référence, appelée position active pour le composantmais position initiale pour le système.
• La source de pression et l’échappement sont identifiables par leursymbole spécifique qui simplifie le schéma global.
• Les autres conduites sont représentées par un trait simple reliantdeux composants.
• Les conduites auxiliaires sont représentées en trait interrompu (poin-tillé).
3.1.1.4 Les différents types de pilotage
La nature des commandes peut être très variée, simple ou parfois multiple:
• commande manuelle par poussoir, coup de poing, levier ou pédale
• commande électrique par solénoïde
• commande hydraulique ou pneumatique
• commande mécanique pour les capteurs
• commande par ressort (il s’agit alors de distributeur monostables)
Par défaut, la case centrale correspond à une situation stable, forcée par un ou plusieurs ressorts.
3.1.1.5 Stabilité des distributeurs
DÉFINITION : Distributeurs monostablesdistributeur ayant un déficit entre le nombre de positions que peut prendre ce distributeur et le nombre de pilotes
DÉFINITION : Distributeurs bistablesdistributeur ayant deux positions stables
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI

2. PRÉACTIONNEURS ÉLECTRIQUES 21/48
3.2 Préactionneurs électriques
REMARQUE : ne passer pas 3 heures sur cette partie !
Parmi les préactionneurs électriques les plus utilisés ontrouve les relais et les contacteurs.
Ces dispositifs permettent de commander un circuit de puis-sance à partir d’un circuit de commande. Les relais sontutilisés avec des circuits intégrés et un petit circuit de com-
mutation (transistor). Ils permettent de commander un circuitde puissance (contacteurs, lampes. . . ).
Les contacteurs fonctionnent de la même façon que les re-lais. Ils permettent cependant la circulation d’un courantbeaucoup plus important. Les contacteurs sont utilises pourdes très fortes puissances (moteur).
3.2.1 Relais
3.2.1.1 Relais electromagnetique
Definition
Comme son nom l’indique, il sert en tout premier lieu àrelayer, c’esta dire à faire une transition entre un courant faible et un courant fort.
Mais il sert également a commander plusieurs organes simultanémentgrâce a ses multiples contacts synchronises.
Constitution
Un relais standard est constitué d’unebobine qui lorsqu’elle est sous tensionattire par un phénomène électromagnétiqueune armature ferromagnétique qui déplacedes contacts.
Caracteristique
Un relais est caractérise par :
• la tensionde sa bobine de commande, 5 V à 220 V.
• le pouvoir de coupurede ses contacts, qui est géné-ralement exprime en Ampère, 0,1 A à 50 A. C’est lecourant maximal qui pourra traverser les contacts.
• le nombre de contactssouhaités.
• son emplacement, circuit imprimé, à visser, embro-
chable, à souder.
• le type de courantde sa bobine, en général du continu.
• la tension d’isolemententre la bobine et les contacts.
• la gamme de tempspour un relais temporisé.
• son ambiance, vibrations, humidité, poussières, tem-pérature.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. PRÉACTIONNEURS ÉLECTRIQUES 22/48
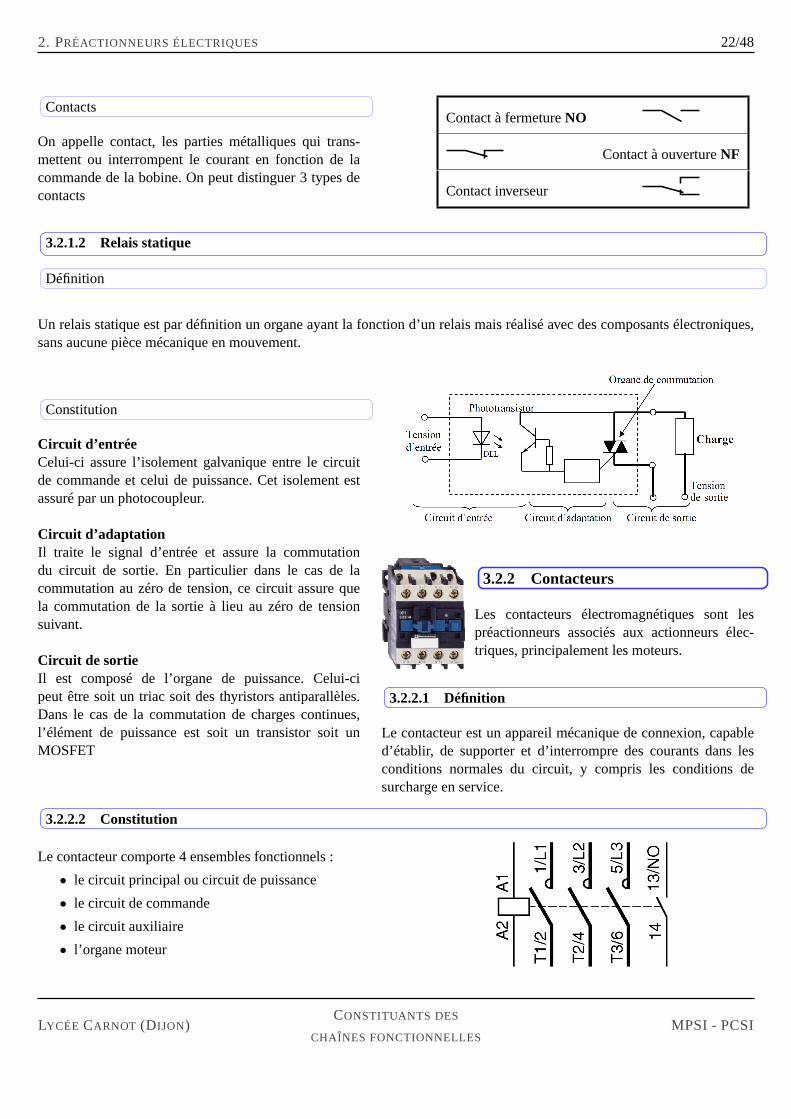
Contacts
On appelle contact, les parties métalliques qui trans-mettent ou interrompent le courant en fonction de lacommande de la bobine. On peut distinguer 3 types decontacts
Contact à fermetureNO
Contact à ouvertureNF
Contact inverseur
3.2.1.2 Relais statique
Définition
Un relais statique est par définition un organe ayant la fonction d’un relaismais réalisé avec des composants électroniques,sans aucune pièce mécanique en mouvement.
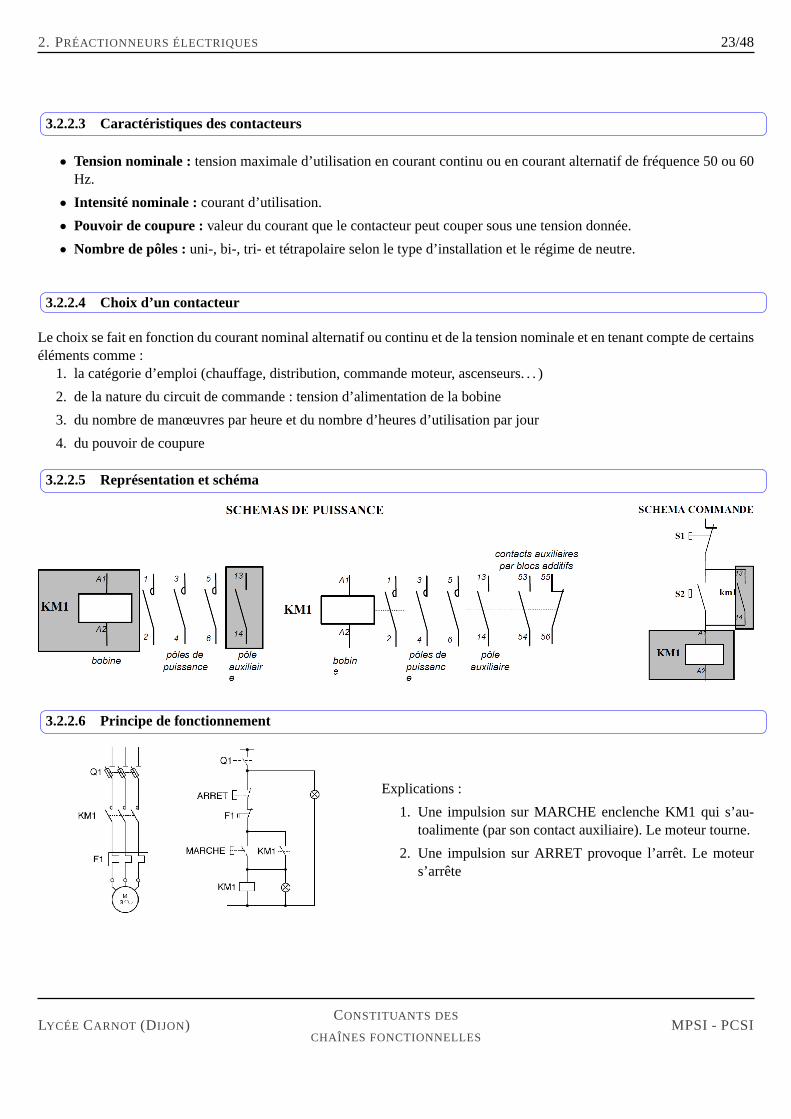
Constitution
Circuit d’entréeCelui-ci assure l’isolement galvanique entre le circuitde commande et celui de puissance. Cet isolement estassuré par un photocoupleur.
Circuit d’adaptationIl traite le signal d’entrée et assure la commutationdu circuit de sortie. En particulier dans le cas de lacommutation au zéro de tension, ce circuit assure quela commutation de la sortie à lieu au zéro de tensionsuivant.
Circuit de sortieIl est composé de l’organe de puissance. Celui-cipeut être soit un triac soit des thyristors antiparallèles.Dans le cas de la commutation de charges continues,l’élément de puissance est soit un transistor soit unMOSFET
3.2.2 Contacteurs
Les contacteurs électromagnétiques sont lespréactionneurs associés aux actionneurs élec-triques, principalement les moteurs.
3.2.2.1 Définition
Le contacteur est un appareil mécanique de connexion, capabled’établir, de supporter et d’interrompre des courants dans lesconditions normales du circuit, y compris les conditions desurcharge en service.
3.2.2.2 Constitution
Le contacteur comporte 4 ensembles fonctionnels :
• le circuit principal ou circuit de puissance
• le circuit de commande
• le circuit auxiliaire
• l’organe moteur
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. PRÉACTIONNEURS ÉLECTRIQUES 23/48
3.2.2.3 Caractéristiques des contacteurs
• Tension nominale :tension maximale d’utilisation en courant continu ou en courant alternatif de fréquence 50 ou 60Hz.
• Intensité nominale :courant d’utilisation.
• Pouvoir de coupure :valeur du courant que le contacteur peut couper sous une tension donnée.
• Nombre de pôles :uni-, bi-, tri- et tétrapolaire selon le type d’installation et le régime de neutre.
3.2.2.4 Choix d’un contacteur
Le choix se fait en fonction du courant nominal alternatif ou continu et de latension nominale et en tenant compte de certainséléments comme :
1. la catégorie d’emploi (chauffage, distribution, commande moteur, ascenseurs. . . )
2. de la nature du circuit de commande : tension d’alimentation de la bobine
3. du nombre de manœuvres par heure et du nombre d’heures d’utilisationpar jour
4. du pouvoir de coupure
3.2.2.5 Représentation et schéma
3.2.2.6 Principe de fonctionnement
Explications :
1. Une impulsion sur MARCHE enclenche KM1 qui s’au-toalimente (par son contact auxiliaire). Le moteur tourne.
2. Une impulsion sur ARRET provoque l’arrêt. Le moteurs’arrête
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
Chapitre 4
Capteurs
4.1 Nécessité de capteurs
4.1.1 Mesure - grandeurs physiques à mesurer
4.1.1.1 Définitions
La mesure est une représentation quantifiée d’une grandeur physique. On définit la terminologie suivante :DÉFINITION : Mesurande
Grandeur physique (pression, température,. . . ) soumise à un mesurageDÉFINITION : Mesurage
Toutes les opérations permettant l’obtention de la valeur numérique d’unegrandeur physique (mesurande)DÉFINITION : Mesure
Valeur numérique représentant au mieux la mesurande (6 MPa, 20C, 2 m/s,. . . )
4.1.1.2 Unités et dimensions
Par abus de langage, on confond souvent mesurage (action) etmesure (résultat de l’action). Les techniques de mesurage fontappel à des méthodes très variées et font intervenir différents typesde phénomènes physiques.
La valeur numériquede la mesure estassociée à une unité. Lesgrandeurs qui nous intéressent sont celles qui interviennent dansle domaine de la mécanique physique, à savoir principalement :déplacement, allongement, vitesse, débit, accélération,force,pression, contrainte, température.
Il est possible d’exprimer la dimension de la mesure à partirduproduit de quelques dimensions.
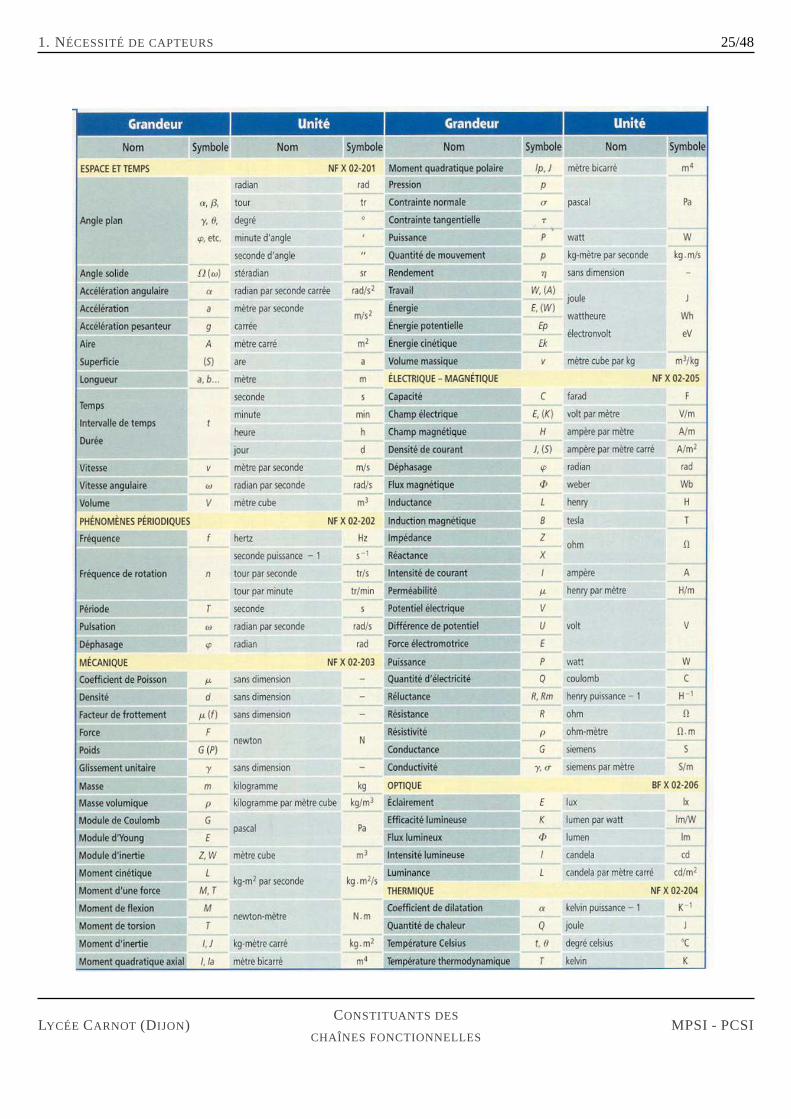
EXEMPLE : système M, K, s, A pour Mètre [L], Kilogramme [M],Seconde [T], Ampère [I ]. Pour exprimer toutes les grandeurs ren-contrées en mécanique, nous utiliserons aussi le Kelvin pour latempérature:
Grandeur physique soumise à mesurage Unités Dimensions
Longueur, épaisseur m [L]
Position, niveau m [L]
Déplacement m [L]
Allongement relatif (Déformation) 1 1
Temps s [T]
Vitesse linéaire m/s [L][T]
Vitesse angulaire rad/s 1[T]
Vibration, Accélération m.s-2 [L][T]2
Force N [M].[L][T]2
Couple N.m [M].[L]2
[T]2
Pression Pa ou MPa [M][L].[T]2
24
1. NÉCESSITÉ DE CAPTEURS 25/48
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. DÉTECTEURS DE PRÉSENCE 26/48
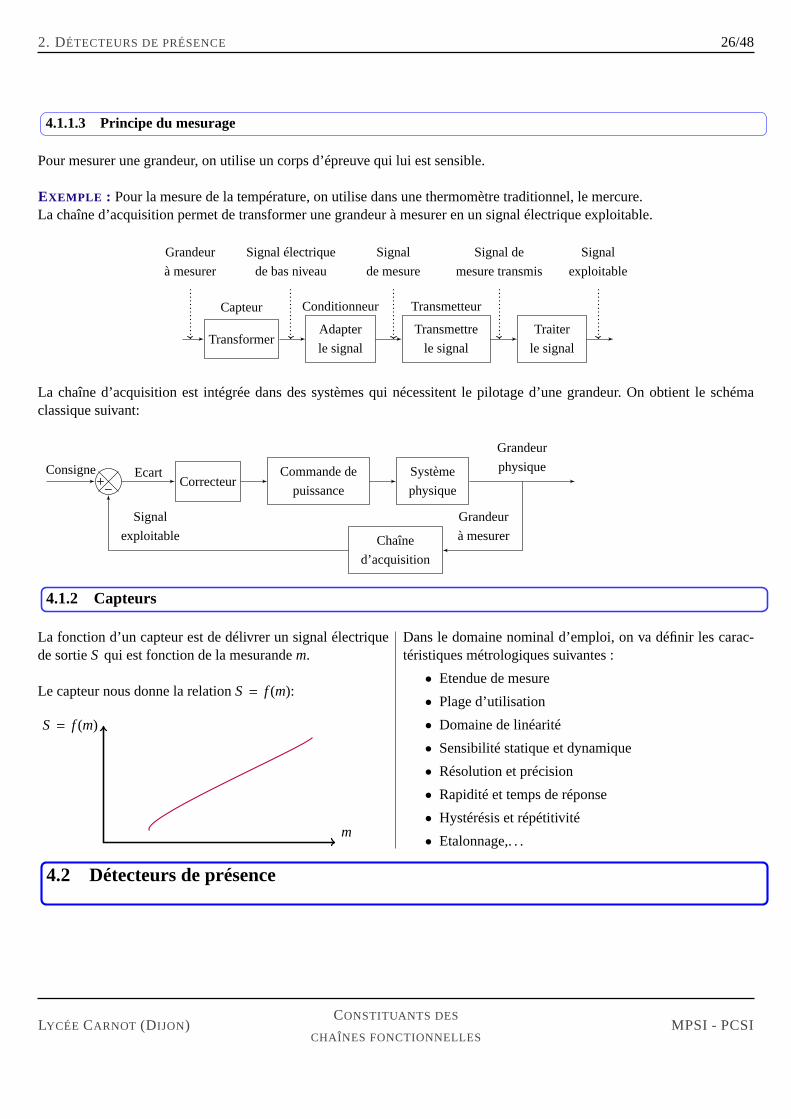
4.1.1.3 Principe du mesurage
Pour mesurer une grandeur, on utilise un corps d’épreuve qui lui estsensible.
EXEMPLE : Pour la mesure de la température, on utilise dans une thermomètre traditionnel, le mercure.La chaîne d’acquisition permet de transformer une grandeur à mesurer en un signal électrique exploitable.
TransformerAdapter
le signal
Transmettre
le signal
Traiter
le signal
Grandeur
à mesurer
Signal électrique
de bas niveau
Signal
de mesure
Signal de
mesure transmis
Signal
exploitable
Capteur Conditionneur Transmetteur
La chaîne d’acquisition est intégrée dans des systèmes qui nécessitent lepilotage d’une grandeur. On obtient le schémaclassique suivant:
−+
ConsigneCorrecteur
Ecart Commande de
puissance
Système
physique
Grandeur
physique
Chaîne
d’acquisition
Grandeur
à mesurer
Signal
exploitable
4.1.2 Capteurs
La fonction d’un capteur est de délivrer un signal électriquede sortieS qui est fonction de la mesurandem.
Le capteur nous donne la relationS = f (m):
S = f (m)
m
Dans le domaine nominal d’emploi, on va définir les carac-téristiques métrologiques suivantes :
• Etendue de mesure
• Plage d’utilisation
• Domaine de linéarité
• Sensibilité statique et dynamique
• Résolution et précision
• Rapidité et temps de réponse
• Hystérésis et répétitivité
• Etalonnage,. . .
4.2 Détecteurs de présence
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. DÉTECTEURS DE PRÉSENCE 27/48
4.2.1 Capteurs de fin de course ou détecteurs de position
Ces sont des capteurs de type tout ou rien, c’est à dire qu’ils n’ont pas pour fonction de mesurer, mais uniquement de détecterdes événements. C’est pour cela qu’on les trouve surtout sur les systèmes automatisés de production.
Détecter la
présence d’un objetSignal électrique
Présence ou non de
l’objet au lieu désiré
capteur de présence
4.2.1.1 Contacteurs de fin de course
Il s’agit de contacteurs délivrant un signal électrique lorsque la tige duvérin est dans la position extrême : rentrée ou sortie.• Avantages :ils sont simples à installer, très peu chers
• Inconvénients : ils ont une durée de vie relativement courte car il y a toujours contact entre la pièce dont on souhaiteavoir les positons extrêmes et le contacteur.
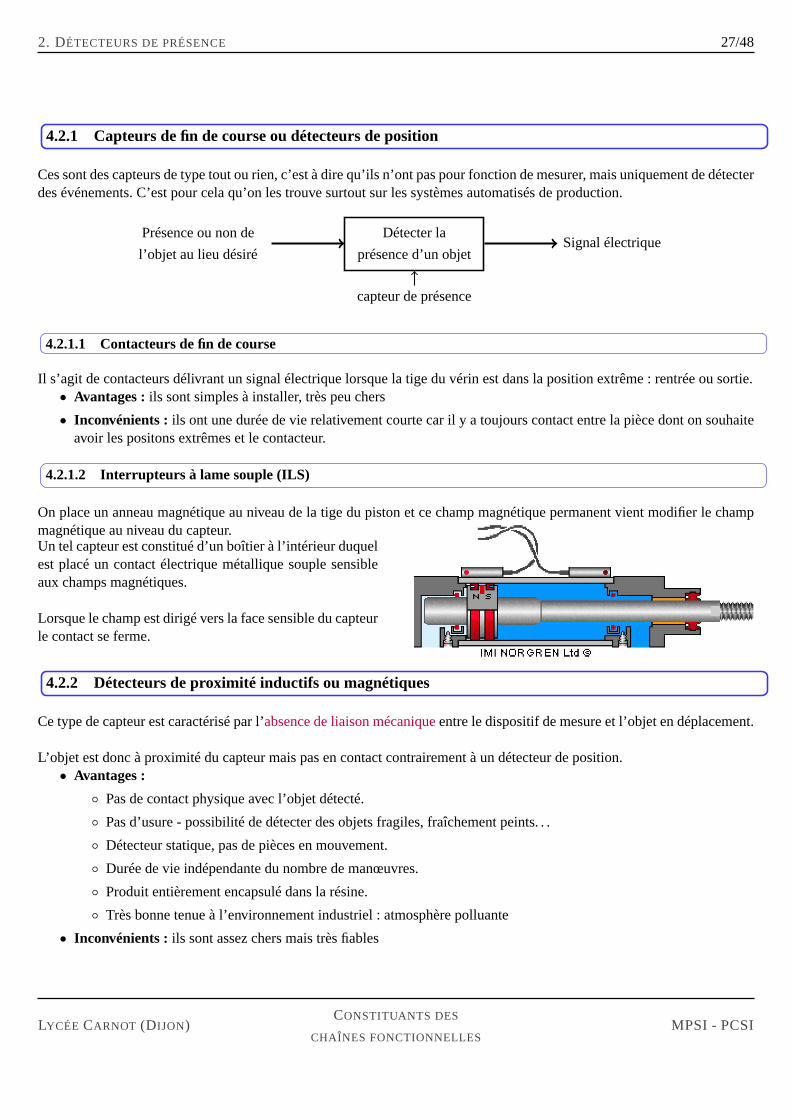
4.2.1.2 Interrupteurs à lame souple (ILS)
On place un anneau magnétique au niveau de la tige du piston et ce champ magnétique permanent vient modifier le champmagnétique au niveau du capteur.Un tel capteur est constitué d’un boîtier à l’intérieur duquelest placé un contact électrique métallique souple sensibleaux champs magnétiques.
Lorsque le champ est dirigé vers la face sensible du capteurle contact se ferme.
4.2.2 Détecteurs de proximité inductifs ou magnétiques
Ce type de capteur est caractérisé par l’absence de liaison mécaniqueentre le dispositif de mesure et l’objet en déplacement.
L’objet est donc à proximité du capteur mais pas en contact contrairement àun détecteur de position.• Avantages :
Pas de contact physique avec l’objet détecté.
Pas d’usure - possibilité de détecter des objets fragiles, fraîchement peints. . .
Détecteur statique, pas de pièces en mouvement.
Durée de vie indépendante du nombre de manœuvres.
Produit entièrement encapsulé dans la résine.
Très bonne tenue à l’environnement industriel : atmosphère polluante
• Inconvénients : ils sont assez chers mais très fiables
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
3. MESURE D’ UNE POSITION 28/48
La technologie des ces détecteurs de proximité inductifs est basée sur la variation d’un champ magnétique à l’approche d’unobjet conducteur du courant électrique.
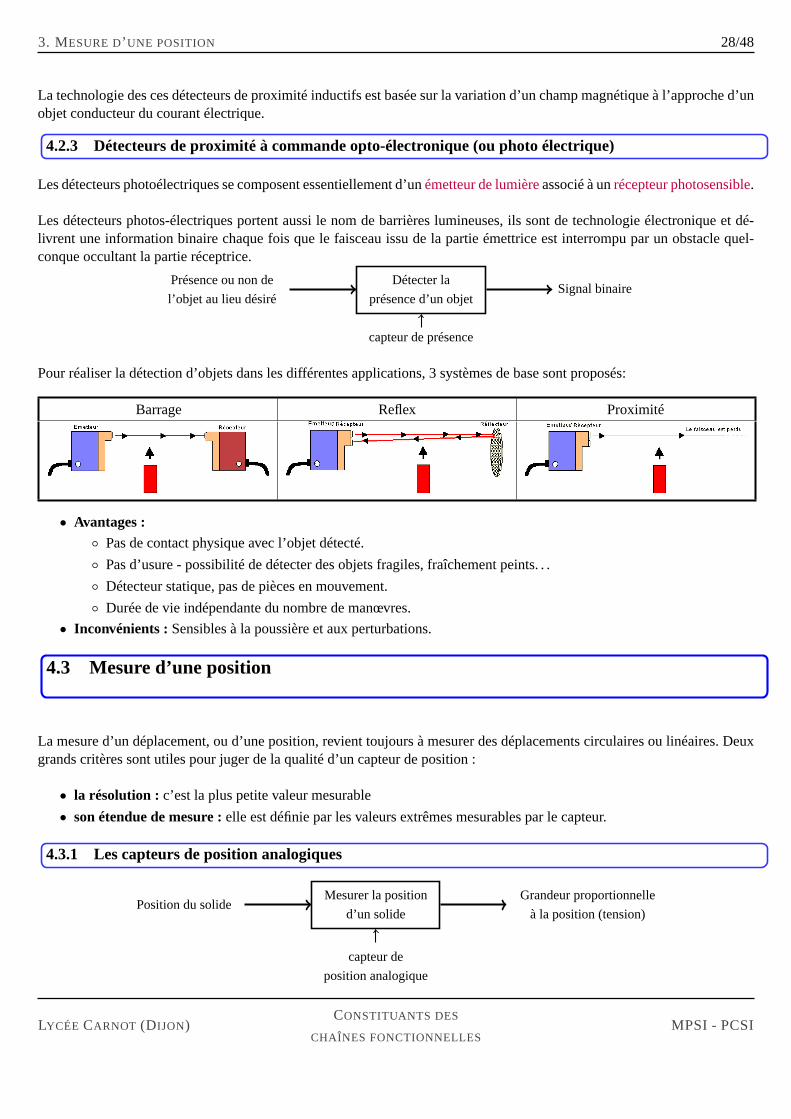
4.2.3 Détecteurs de proximité à commande opto-électronique (ou photo électrique)
Les détecteurs photoélectriques se composent essentiellement d’unémetteur de lumièreassocié à unrécepteur photosensible.
Les détecteurs photos-électriques portent aussi le nom de barrières lumineuses, ils sont de technologie électronique et dé-livrent une information binaire chaque fois que le faisceau issu de la partieémettrice est interrompu par un obstacle quel-conque occultant la partie réceptrice.
Détecter la
présence d’un objetSignal binaire
Présence ou non de
l’objet au lieu désiré
capteur de présence
Pour réaliser la détection d’objets dans les différentes applications, 3 systèmes de base sont proposés:
Barrage Reflex Proximité
• Avantages : Pas de contact physique avec l’objet détecté.
Pas d’usure - possibilité de détecter des objets fragiles, fraîchement peints. . .
Détecteur statique, pas de pièces en mouvement.
Durée de vie indépendante du nombre de manœvres.
• Inconvénients :Sensibles à la poussière et aux perturbations.
4.3 Mesure d’une position
La mesure d’un déplacement, ou d’une position, revient toujours à mesurer des déplacements circulaires ou linéaires. Deuxgrands critères sont utiles pour juger de la qualité d’un capteur de position:
• la résolution : c’est la plus petite valeur mesurable
• son étendue de mesure :elle est définie par les valeurs extrêmes mesurables par le capteur.
4.3.1 Les capteurs de position analogiques
Mesurer la position
d’un solide
Grandeur proportionnelle
à la position (tension)Position du solide
capteur de
position analogique
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI

3. MESURE D’ UNE POSITION 29/48
Bien que la place des capteurs numériques dans les systèmes asservis soitconsidérable maintenant, les capteurs de dépla-cement analogiques trouvent encore leur place dans bon nombre d’applications, en raison de leur qualité et de leur facilitéd’intégration.
Le principe de la mesure consiste à mesurer une grandeur physique (souvent d’origine électrique), qui varie en même tempsque la grandeur à mesurer appelée mesurande.
La mesure n’est donc pas directe, ce qui est souvent source d’erreurs, en particulier de linéarité ! Ce sont des capteursgénéralement basés sur la variation d’impédance d’un dipôle passif. La variation de la grandeur physique à mesurer peut-être liée à :
• la variation de résistance (R enΩ) d’une résistance
• la variation de capacité (C en F) d’un condensateur
• la variation d’inductance (L en H) d’une bobine
4.3.1.1 Capteurs potentiométriques ou potentiomètres
La simplicité du potentiomètre en fait un instrument de mesure directe. La tension recueillie est en effet directement propor-tionnelle à la résistance du circuit entre le curseur et l’une des extrémités dela piste, qui est elle-même proportionnelle à ladistance entre ces deux points.
On rappelle que la résistance d’un conducteur est donnée par :R= ρ. lS avec
ρ la résistivité
l la longueur du conducteur
S la section du conducteurOn mesure la résistance entre une extrémité fixeL (respectivementθ) et un curseur mobilex(respectivementθ) :
Dans le cas d’un déplacement linéaire du curseur le long :R(x) = xL .R0
On a une relation analogue dans le cas d’un déplacement angulaire (circulaire ou hélicoïdal) :R(θ) = θ
Θ.R0
La résistance est constituée par une piste conductrice en résine chargée de grains conducteurs (carbone, métal. . . ) ou un filbobiné isolé (sauf au contact avec le curseur). Les ordres de grandeurs deR0 vont de 1 kΩ à 1 MΩ . La résistance du curseurdoit être faible et stable (mouvement, usure). La résistance de contact doit présenter les mêmes qualités (plus dur à assurerdans le cas de la piste).• Etendue de mesure
Pour les potentiomètres linéaires, l’étendue de mesure est la longueur de la piste.
Pour les potentiomètres circulaires (comme ceux de la plate forme 6 axes, de MAXPID et du groupe de direction duchariot filoguidé), l’étendue de mesure est légèrement inférieure à 1 tour. Ces potentiomètres circulaires (ou rotatifs)sont donc monotour.
• Résolution Elle est théoriquement infinie pour les pistes en plastique constitué d’un polymère chargé en graphite,conducteur, mais elle est directement liée au diamètre du fil de bobinage pourles pistes bobinées.
• Avantages
Simplicité de fonctionnement et d’exploitation du signal électrique en sortie.
Précision assez forte car la résolution est bonne
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI

3. MESURE D’ UNE POSITION 30/48
Peu chers
• Inconvénients
Bruit dans le signal engendré par le frottement du curseur sur la piste
Usure car le frottement mécanique entre le curseur et la piste détériore les éléments en contact
Durée de vie limitée
4.3.1.2 Remarques sur les potentiomètres
Le capteur rotatif peut être directement relié à la grandeur à mesurer, c’est le cas pour MAXPID où le potentiomètre donnela position angulaire du bras ou pour le groupe de direction du chariot filoguidé. En effet, le potentiomètre est placé directe-ment au niveau de l’arbre de sortie du réducteur, qui est l’arbre du groupe de direction.
REMARQUE : Cette prise de mesure assure une bonne précision car elle est située directement au niveau de l’élément donton souhaite avoir la position angulaire.
Pour la plate forme 6 axes, le potentiomètre, appelépotentiomètre de recopie, trouve sa place après un système de transfor-mation de mouvement, le système roue et vis sans fin. Ce système est nécessaire afin que le potentiomètre ne fasse pas plusd’un tour pour toute la course de la tige du vérin. Il a pourtant pour objectif de mesurer la longueur de la tige du vérin :ainsi, dans ce cas, la mesure ne s’opère pas directement au niveau de l’élément concerné. Cependant, on connaît la chaînecinématique liant la longueur de la tige du vérin à la rotation du potentiomètre. Ainsi,à partir de la mesure du potentiomètre,on peut déduire la valeur de la longueur de la tige du vérin, aux jeux près.. . .
REMARQUE : Pour un souci de précision, il est donc plus judicieux, lorsque cela estpossible, de mesurer la grandeurphysique via un capteur au niveau de l’élément concerné. On s’affranchit par-là de la chaîne cinématique qui peut comporterdes jeux et conduire à des erreurs dans la mesure.
4.3.1.3 Les capteurs de déplacement capacitifs
La capacité d’un condensateur vaut :
C = ε0.εr .Se
avec
ε0 la permitivité du vide
εr la permitivité relative de l’isolant
S la surface en regard des armatures
e l’épaisseur de l’isolant
Pour faire varier la capacité du condensateur enfonction du déplacement, on fait varier soit la sur-face en regard, soit l’épaisseure.
La mesure de la capacité requiert une tension alternative. L’impédance ducondensateur est alors, à fréquence fixe, fonction
uniquement de sa capacité(
1jCω
)
.
• Avantages
Grande sensibilité
• Inconvénients
Faible étendue de mesure ( < 1cm)
Relativement complexes en traitement du signala posteriori
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
3. MESURE D’ UNE POSITION 31/48
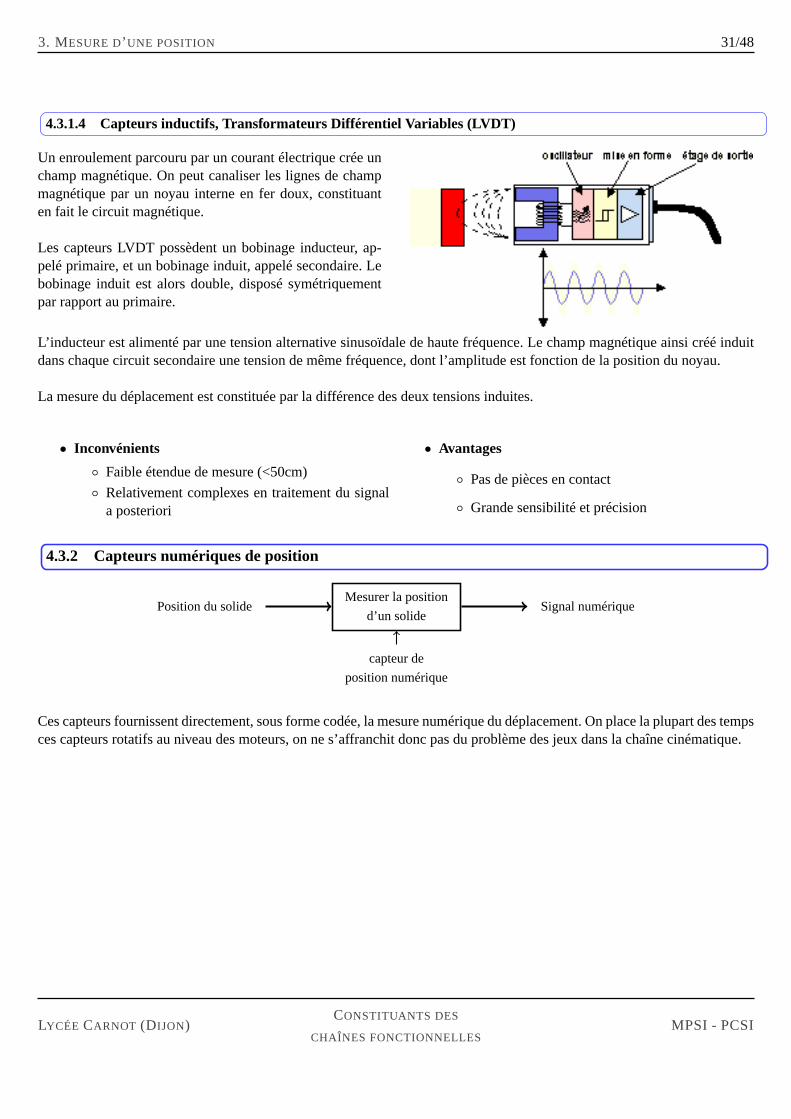
4.3.1.4 Capteurs inductifs, Transformateurs Différentiel Variables (LVDT)
Un enroulement parcouru par un courant électrique crée unchamp magnétique. On peut canaliser les lignes de champmagnétique par un noyau interne en fer doux, constituanten fait le circuit magnétique.
Les capteurs LVDT possèdent un bobinage inducteur, ap-pelé primaire, et un bobinage induit, appelé secondaire. Lebobinage induit est alors double, disposé symétriquementpar rapport au primaire.
L’inducteur est alimenté par une tension alternative sinusoïdale de haute fréquence. Le champ magnétique ainsi créé induitdans chaque circuit secondaire une tension de même fréquence, dont l’amplitude est fonction de la position du noyau.
La mesure du déplacement est constituée par la différence des deux tensions induites.
• Inconvénients
Faible étendue de mesure (<50cm)
Relativement complexes en traitement du signala posteriori
• Avantages
Pas de pièces en contact
Grande sensibilité et précision
4.3.2 Capteurs numériques de position
Mesurer la position
d’un solideSignal numériquePosition du solide
capteur de
position numérique
Ces capteurs fournissent directement, sous forme codée, la mesure numérique du déplacement. On place la plupart des tempsces capteurs rotatifs au niveau des moteurs, on ne s’affranchit doncpas du problème des jeux dans la chaîne cinématique.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
3. MESURE D’ UNE POSITION 32/48
4.3.2.1 Capteurs incrémentaux
Fonctionnement
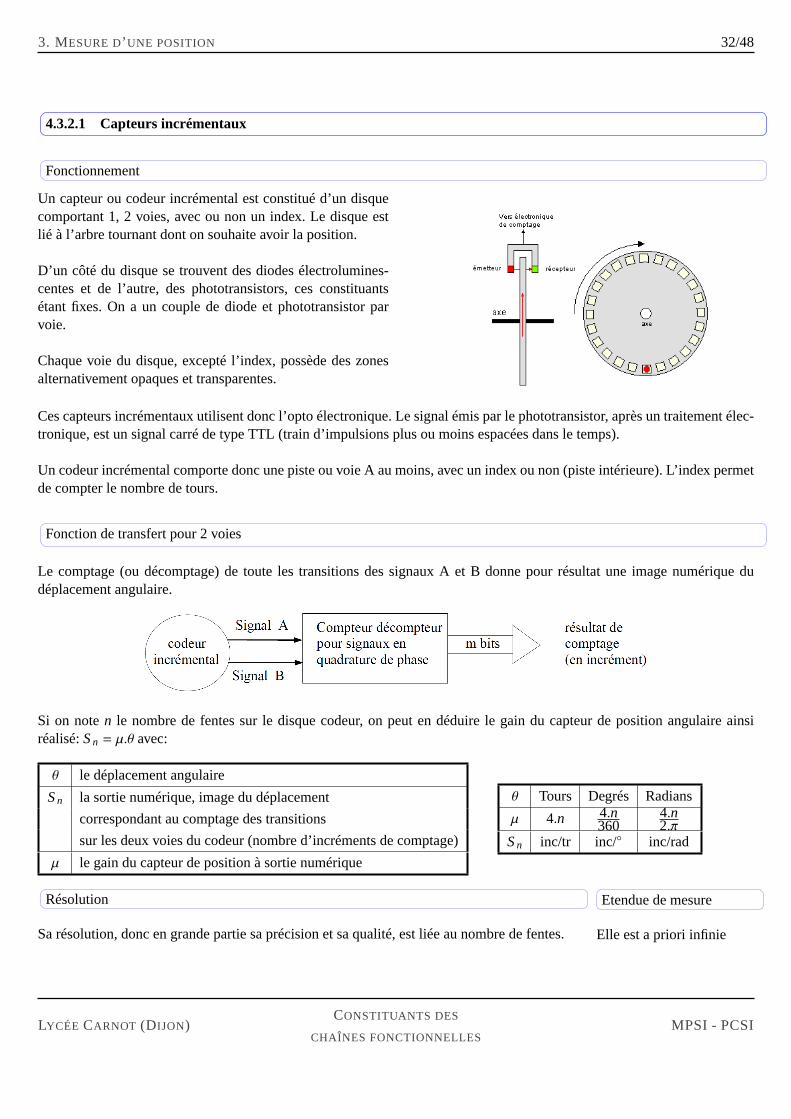
Un capteur ou codeur incrémental est constitué d’un disquecomportant 1, 2 voies, avec ou non un index. Le disque estlié à l’arbre tournant dont on souhaite avoir la position.
D’un côté du disque se trouvent des diodes électrolumines-centes et de l’autre, des phototransistors, ces constituantsétant fixes. On a un couple de diode et phototransistor parvoie.
Chaque voie du disque, excepté l’index, possède des zonesalternativement opaques et transparentes.
Ces capteurs incrémentaux utilisent donc l’opto électronique. Le signal émispar le phototransistor, après un traitement élec-tronique, est un signal carré de type TTL (train d’impulsions plus ou moins espacées dans le temps).
Un codeur incrémental comporte donc une piste ou voie A au moins, avec un index ou non (piste intérieure). L’index permetde compter le nombre de tours.
Fonction de transfert pour 2 voies
Le comptage (ou décomptage) de toute les transitions des signaux A et B donne pour résultat une image numérique dudéplacement angulaire.
Si on noten le nombre de fentes sur le disque codeur, on peut en déduire le gain du capteur de position angulaire ainsiréalisé:Sn = µ.θ avec:
θ le déplacement angulaire
Sn la sortie numérique, image du déplacement
correspondant au comptage des transitions
sur les deux voies du codeur (nombre d’incréments de comptage)
µ le gain du capteur de position à sortie numérique
θ Tours Degrés Radians
µ 4.n 4.n360
4.n2.π
Sn inc/tr inc/ inc/rad
Résolution
Sa résolution, donc en grande partie sa précision et sa qualité, est liée aunombre de fentes.
Etendue de mesure
Elle est a priori infinie
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI

3. MESURE D’ UNE POSITION 33/48
Détection du sens de rotation
Le codeur incrémental est un capteur relatif (on ne connaît pas le sens de rotation ni l’origine). La détection du sens derotation peut néanmoins avoir lieu grâce à une deuxième voie, décalée d’unquart de période par rapport à la première voie.L’évolution des deux signaux est alors différente dans un sens par rapport à l’autre.
Le déphasage des signauxA et B permet de déterminerle sens de rotation :
• dans un sens pendant le front montant du signalA, le signalB est à 0.
• dans l’autre sens pendant le front montant du si-gnalA, le signalB est à 1.
Prise d’origine
L’initialisation d’un capteur incrémental est une prise d’origine. Sa nécessité provient du fait que le capteur est relatif. Elleconsiste en un déplacement du système vers un capteur tout ou rien, appelé capteur d’origine, qui matérialise l’origine ma-chine.
Elle est indispensable à chaque remise sous tension du système : c’est le cas pour le Robot ERICC3. Elle peut être suppriméesi on utilise des codeurs absolus, plus chers.
4.3.2.2 Les codeurs absolus
Fonctionnement
Un codeur optique absolu fonctionne de la même manière qu’un codeurincrémental sauf que cette fois, le signal émis n’est pas un train d’impul-sions mais un véritable code numérique sur 4, 8, 9, 12 ou même 16 bits.
Ceci n’est pas réalisé par un ou deux couples de diodes et phototransistorsmais par un couple par piste, avec un nombre de pistes égal au nombre debit. Le disque comporte donc plusieurs pistes.
La première piste en partant du centre du disque est composée d’une moitié opaque et d’une moitié transparente, la lecturede cette piste permet de déterminer dans quel demi-tour du disque on se situe.C’est la piste MSBMost Significant Bit= bitde poids le plus fort.
La piste suivante, en allant vers l’extérieur, est divisée en quatre quarts alternativement opaques et transparents. La lecture decette piste, combinée avec la lecture de la piste précédente, permet de déterminer dans quel quart de tour du disque on se situe.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
4. MESURE D’ UNE VITESSE 34/48
La piste suivante permet de déterminer dans quel huitième de tour on se situe,la suivante dans quel seizième de tour on sesitue. etc . . .La dernière piste, la plus extérieure, est la piste LSBLeast Significant Bit= bit de poids le plus faible.
Afin de limiter le risque d’erreur, on préfère employer un codage en codeGRAY, en ne changeant qu’un bit à la fois.
Résolution
C’est la dernière piste qui donne la précision finale du codeur appelée résolution.
Si on appelleN le nombre de pistes, cette dernière piste comportera 2N points. Le nombre de positions codées sur un tourdu disque sera 2.N, on dira alors que le codeur a une résolution de 2N points par tour.
Détecter le sens de rotation n’est pas utile puisque le mots binaire émis est la valeur d’un angle compris entre 0 et 2.π . C’estpour cela qu’on les appelle codeurs semi-absolus. Lorsque le codeur doit mesurer des angles >2.π , on doit lui adjoindre uncompteur qui compte le nombre de tours effectués. Il n’est donc pas toujours nécessaire d’initialiser le capteur.
4.4 Mesure d’une vitesse
4.4.1 Génératrice tachymétrique
Les génératrices tachymétriques sont des moteurs montésà l’envers. En effet, les moteurs transforment une tension en rota-tion d’un rotor. Les moteurs électriques peuvent également fonctionner en récepteur. On impose une vitesse de rotation aumoteur qui va être transformée en tension.
Il existe trois types de moteurs (à courant continu, synchrone et asynchrone). Il existe par conséquent trois types de généra-trices tachymétriques :• Les génératrices tachymétriques continues
• Les génératrices tachymétriques synchrones
• Les génératrices tachymétriques asynchrones
4.4.2 Mesure de vitesse à partir d’une mesure de position
4.4.2.1 Codeur incrémental
On utilise l’information de position donnée par le codeur incrémental pour donner la vitesse.
Le nombre de transitions reçues des deux signaux du codeur, pendantun temps fixé, appelé temps d’échantillonnage, est uneimage numérique de la vitesse de rotation.
Si on note le temps d’échantillonnage de mesureTem, on peut en déduire le gain du capteur de vitesse:
Sn = µv.N =4.n60.Tem.N avec
N est la vitesse de rotation exprimée en tr/min
Sn est la sortie mesure numérique de vitesse exprimée en incréments (inc)
n le nombre de fentes sur le disque codeur
µv est le gain du capteur exprimé en inc/tr/min.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
5. MESURE D’ UNE ACCÉLÉRATION 35/48
C’est cette méthode de mesure qui est utilisée sur le chariot filoguidé.
4.4.2.2 Capteur à variation d’inductance
La mesure de la vitesse est basée sur le signal donné par un détecteurs de proximité inductifs. L’information délivrée par lecapteur étant fonction de l’entrefer et non de sa vitesse de variation, cecapteur doit être excité par une source de courantalternatif de fréquence 5 à 10 fois plus élevée que la limite supérieure de la bande passante. Un amplificateur à porteuseconditionne le signal. Cette solution, rarement utilisée en tachymétrie car coûteuse, doit être mentionnée car elle est intéres-sante dans le cas d’un environnement sévère sur le planbruit.
4.5 Mesure d’une accélération
4.5.1 Accéléromètres
4.5.1.1 Classification
Classification suivant la nature du phénomène de détection
Les accéléromètres non asservis, classés suivant le phénomène de détection, sont les suivants :
• à jauges de contrainte
• à détection piézorésistive
• à détection piézoélectrique
• à détection optique par occultation
• à fibres optiques
• à détection capacitive
• à réluctance variable (détection inductive)
Accéléromètres à déplacements asservis
Il s’agit des accéléromètres :• à rappel électromagnétique à aimants permanents
• à rappel au moyen de forces d’origine électrostatique.
La boucle d’asservissement, dans les deux cas, peut être de type analogique ou numérique.
Accéléromètres à poutres vibrantes
Bien que de type en boucle ouverte, les accéléromètres à poutres vibrantes (dénommés aussi à ondes de volume) rivalisentde précision avec les appareils asservis. Leur sensibilité est très élevée, malgré les déplacements extrêmement faibles de lamasse d’épreuve.
4.5.1.2 Accéléromètres à jauges de contrainte
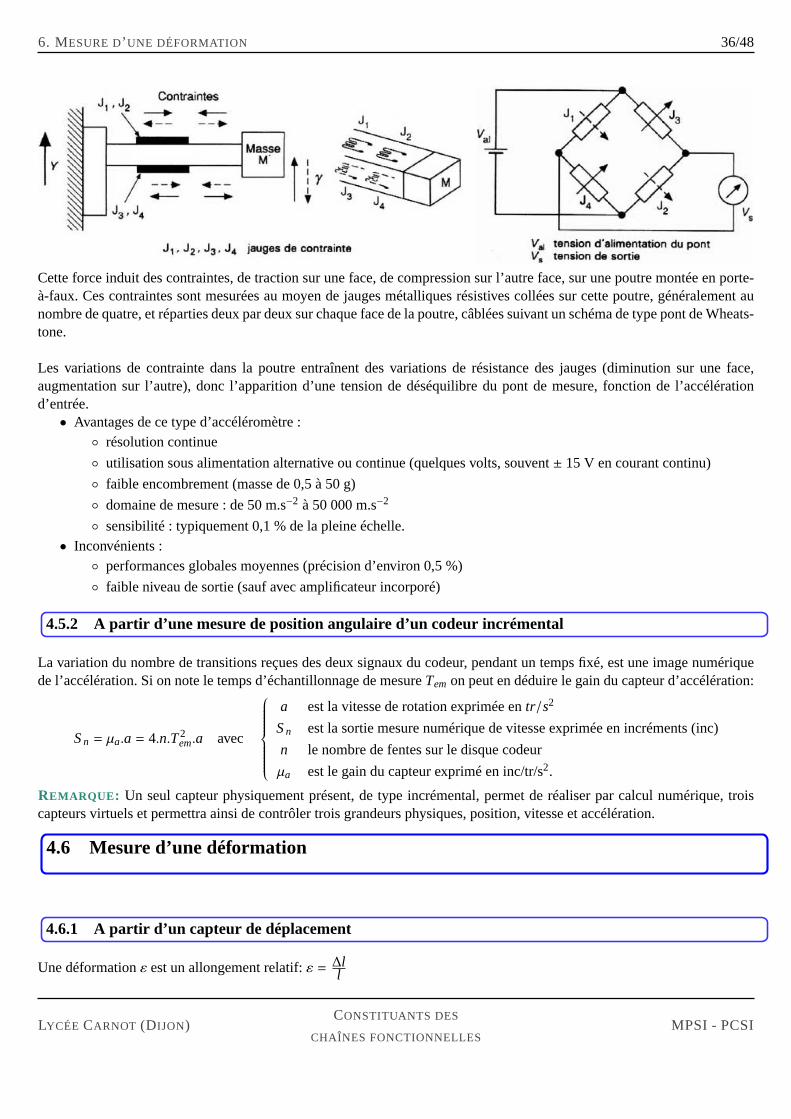
Ce type d’accéléromètre est placé sur le support suspension de moto BMW.
Principe
Une masse sismiqueM subit une force d’origine inertielle sous l’action d’une accélération appliquée au capteur suivant l’axeY.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
6. MESURE D’ UNE DÉFORMATION 36/48
Cette force induit des contraintes, de traction sur une face, de compression sur l’autre face, sur une poutre montée en porte-à-faux. Ces contraintes sont mesurées au moyen de jauges métalliques résistives collées sur cette poutre, généralement aunombre de quatre, et réparties deux par deux sur chaque face de la poutre, câblées suivant un schéma de type pont de Wheats-tone.
Les variations de contrainte dans la poutre entraînent des variations de résistance des jauges (diminution sur une face,augmentation sur l’autre), donc l’apparition d’une tension de déséquilibredu pont de mesure, fonction de l’accélérationd’entrée.• Avantages de ce type d’accéléromètre :
résolution continue
utilisation sous alimentation alternative ou continue (quelques volts, souvent± 15 V en courant continu)
faible encombrement (masse de 0,5 à 50 g)
domaine de mesure : de 50 m.s−2 à 50 000 m.s−2
sensibilité : typiquement 0,1 % de la pleine échelle.• Inconvénients :
performances globales moyennes (précision d’environ 0,5 %)
faible niveau de sortie (sauf avec amplificateur incorporé)
4.5.2 A partir d’une mesure de position angulaire d’un codeur incrémental
La variation du nombre de transitions reçues des deux signaux du codeur, pendant un temps fixé, est une image numériquede l’accélération. Si on note le temps d’échantillonnage de mesureTem on peut en déduire le gain du capteur d’accélération:
Sn = µa.a = 4.n.T2em.a avec
a est la vitesse de rotation exprimée entr/s2
Sn est la sortie mesure numérique de vitesse exprimée en incréments (inc)
n le nombre de fentes sur le disque codeur
µa est le gain du capteur exprimé en inc/tr/s2.
REMARQUE : Un seul capteur physiquement présent, de type incrémental, permet de réaliser par calcul numérique, troiscapteurs virtuels et permettra ainsi de contrôler trois grandeurs physiques, position, vitesse et accélération.
4.6 Mesure d’une déformation
4.6.1 A partir d’un capteur de déplacement
Une déformationε est un allongement relatif:ε = ∆ll
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
7. MESURE D’ UNE FORCE, D’ UN COUPLE ET D’ UNE PRESSION 37/48
Connaissant la longueur initialel, on mesure à l’aide d’un capteur de déplacement l’allongement∆l de l’objet. En faisant lerapport, on obtient la déformation.
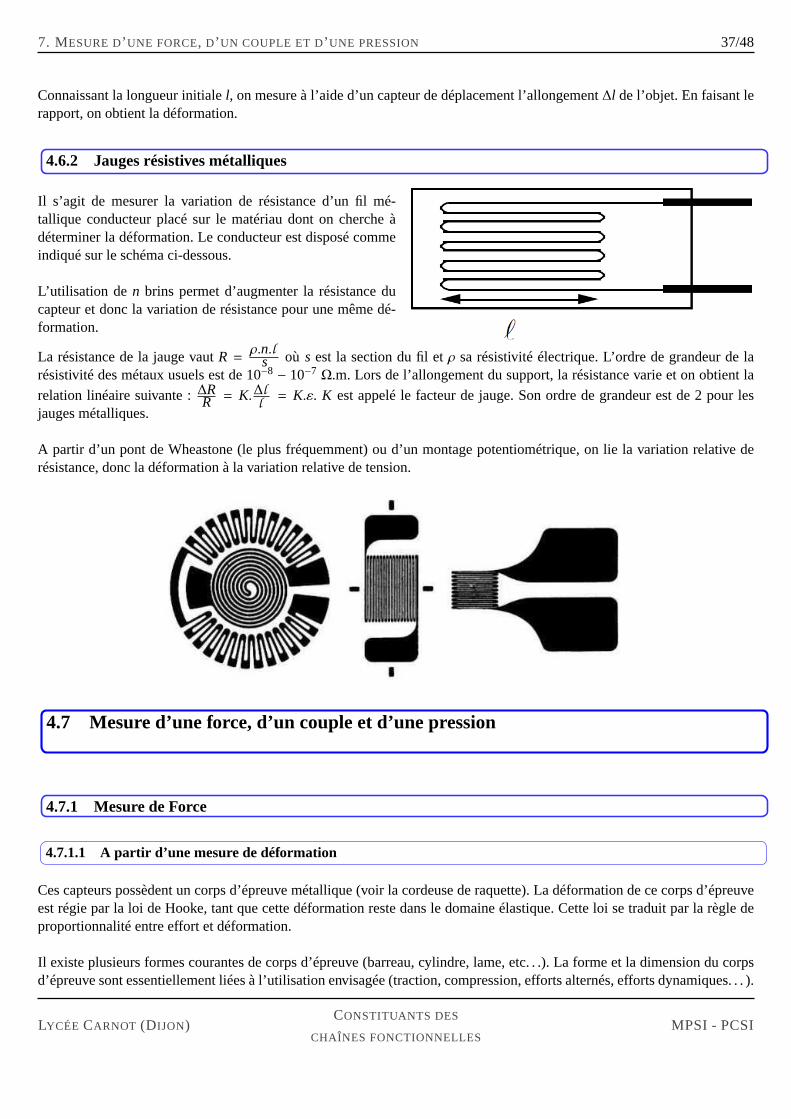
4.6.2 Jauges résistives métalliques
Il s’agit de mesurer la variation de résistance d’un fil mé-tallique conducteur placé sur le matériau dont on cherche àdéterminer la déformation. Le conducteur est disposé commeindiqué sur le schéma ci-dessous.
L’utilisation de n brins permet d’augmenter la résistance ducapteur et donc la variation de résistance pour une même dé-formation.
La résistance de la jauge vautR = ρ.n.ls où s est la section du fil etρ sa résistivité électrique. L’ordre de grandeur de larésistivité des métaux usuels est de 10−8
− 10−7Ω.m. Lors de l’allongement du support, la résistance varie et on obtient la
relation linéaire suivante :∆RR = K.∆l
l= K.ε. K est appelé le facteur de jauge. Son ordre de grandeur est de 2 pour les
jauges métalliques.
A partir d’un pont de Wheastone (le plus fréquemment) ou d’un montage potentiométrique, on lie la variation relative derésistance, donc la déformation à la variation relative de tension.
4.7 Mesure d’une force, d’un couple et d’une pression
4.7.1 Mesure de Force
4.7.1.1 A partir d’une mesure de déformation
Ces capteurs possèdent un corps d’épreuve métallique (voir la cordeuse de raquette). La déformation de ce corps d’épreuveest régie par la loi de Hooke, tant que cette déformation reste dans le domaine élastique. Cette loi se traduit par la règle deproportionnalité entre effort et déformation.
Il existe plusieurs formes courantes de corps d’épreuve (barreau,cylindre, lame, etc. . .). La forme et la dimension du corpsd’épreuve sont essentiellement liées à l’utilisation envisagée (traction, compression, efforts alternés, efforts dynamiques. . . ).
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
7. MESURE D’ UNE FORCE, D’ UN COUPLE ET D’ UNE PRESSION 38/48
Elles dépendent de la valeur maximale de l’effort appliqué ainsi que de la nature du champ de contraintes détectées, doncde la position des jauges (contraintes longitudinales et transversales) collées sur les éléments actifs du corps d’épreuve. Parexemple, les capteurs possédant un corps d’épreuve travaillant en flexion auront une meilleure linéarité que d’autres tra-vaillant en traction ou compression. C’est une qualité intéressante en pesage, la contrepartie étant une plus grande fragilitéaux surcharges et une plus grande sensibilité au fluage.
4.7.1.2 Capteurs à mesure de déplacement
Plutôt que de passer par la déformation subie par un organe collé comme dans les capteurs à jauges, le principeest ici de mesurer la variation de longueur du corps d’épreuve soumis à un effort, le problème technologiqueposé étant de rendre perceptibles des déformations de faible amplitude.
Historiquement, le peson à ressort hélicoïdal (le ressort étant le corps d’épreuve) illustre le principe où l’on suitla déformation par la position d’un index sur une règle graduée.
L’amplitude de la déformation dépend de la raideur du corps d’épreuve ou, plutôt, de son élasticité. La grandesouplesse d’un corps d’épreuve de ce type améliore relativement la sensibilité du capteur (intéressante dans lecas du pesage) mais elle réduit la finesse et les caractéristiques dynamiques qui sont, dans ce cas, quasi nulles.
4.7.2 Mesure de couple
Comme pour les capteurs d’efforts, on utilise pour les couplemètres les propriétés d’un corps d’épreuve déformable.
Il s’agit, dans un couplemètre, de solliciter en torsion soit un cylindre ou untube, soit un barreau de section carrée et dedétecter la torsion provoquée par le moment du couple. Le système de direction assistée utilise des jauges de déformationpour mesurer le couple au volant.
Cette détection est effectuée comme pour les capteurs d’efforts, selon lesmêmes principes auxquels correspondent les typesde couplemètres suivants : couplemètres à jauges, les plus courants.
4.7.3 Mesure d’une pression
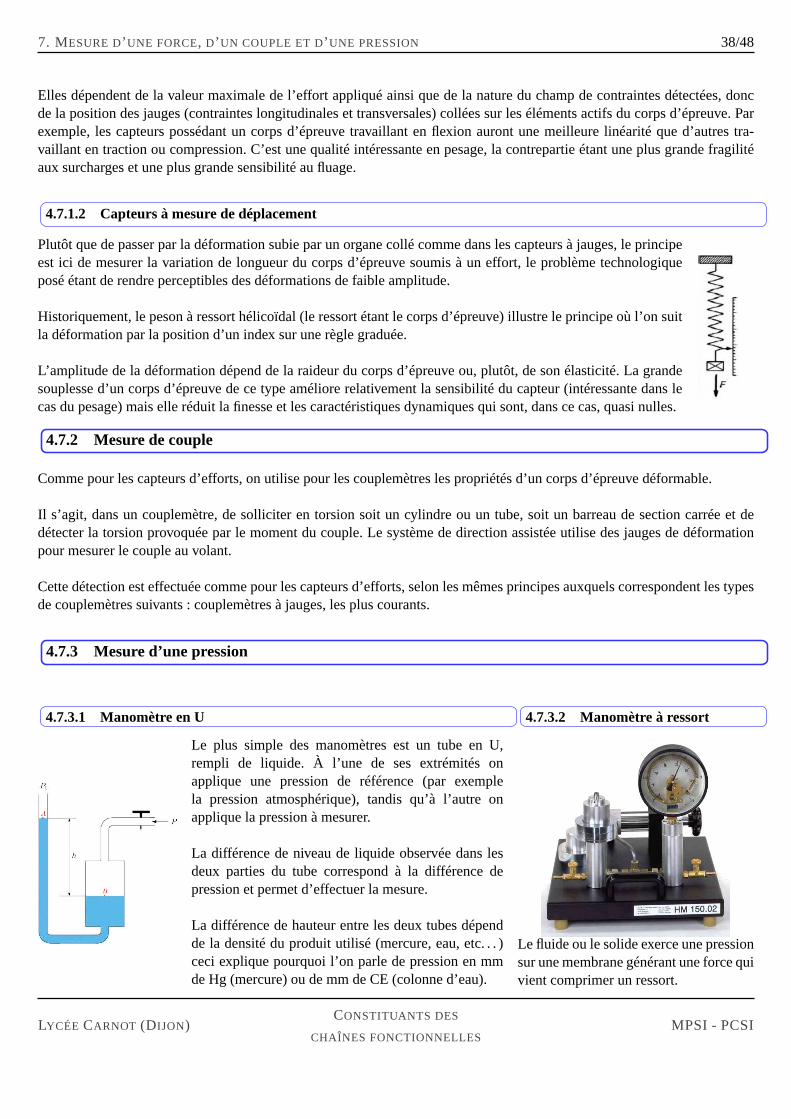
4.7.3.1 Manomètre en U
Le plus simple des manomètres est un tube en U,rempli de liquide. À l’une de ses extrémités onapplique une pression de référence (par exemplela pression atmosphérique), tandis qu’à l’autre onapplique la pression à mesurer.
La différence de niveau de liquide observée dans lesdeux parties du tube correspond à la différence depression et permet d’effectuer la mesure.
La différence de hauteur entre les deux tubes dépendde la densité du produit utilisé (mercure, eau, etc. . . )ceci explique pourquoi l’on parle de pression en mmde Hg (mercure) ou de mm de CE (colonne d’eau).
4.7.3.2 Manomètre à ressort
Le fluide ou le solide exerce une pressionsur une membrane générant une force quivient comprimer un ressort.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
8. MESURE D’ UNE TEMPÉRATURE 39/48
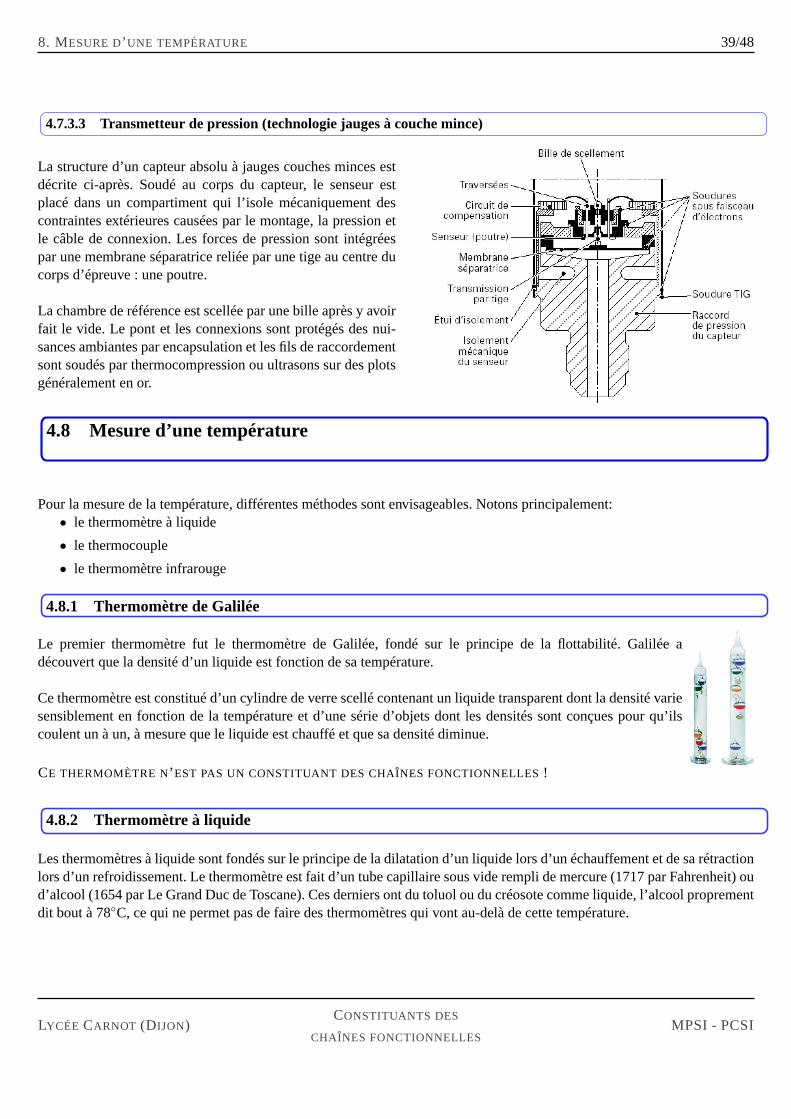
4.7.3.3 Transmetteur de pression (technologie jauges à couche mince)
La structure d’un capteur absolu à jauges couches minces estdécrite ci-après. Soudé au corps du capteur, le senseur estplacé dans un compartiment qui l’isole mécaniquement descontraintes extérieures causées par le montage, la pression etle câble de connexion. Les forces de pression sont intégréespar une membrane séparatrice reliée par une tige au centre ducorps d’épreuve : une poutre.
La chambre de référence est scellée par une bille après y avoirfait le vide. Le pont et les connexions sont protégés des nui-sances ambiantes par encapsulation et les fils de raccordementsont soudés par thermocompression ou ultrasons sur des plotsgénéralement en or.
4.8 Mesure d’une température
Pour la mesure de la température, différentes méthodes sont envisageables. Notons principalement:• le thermomètre à liquide
• le thermocouple
• le thermomètre infrarouge
4.8.1 Thermomètre de Galilée
Le premier thermomètre fut le thermomètre de Galilée, fondé sur le principe de la flottabilité. Galilée adécouvert que la densité d’un liquide est fonction de sa température.
Ce thermomètre est constitué d’un cylindre de verre scellé contenant un liquide transparent dont la densité variesensiblement en fonction de la température et d’une série d’objets dont lesdensités sont conçues pour qu’ilscoulent un à un, à mesure que le liquide est chauffé et que sa densité diminue.
CE THERMOMÈTRE N’ EST PAS UN CONSTITUANT DES CHAÎNES FONCTIONNELLES!
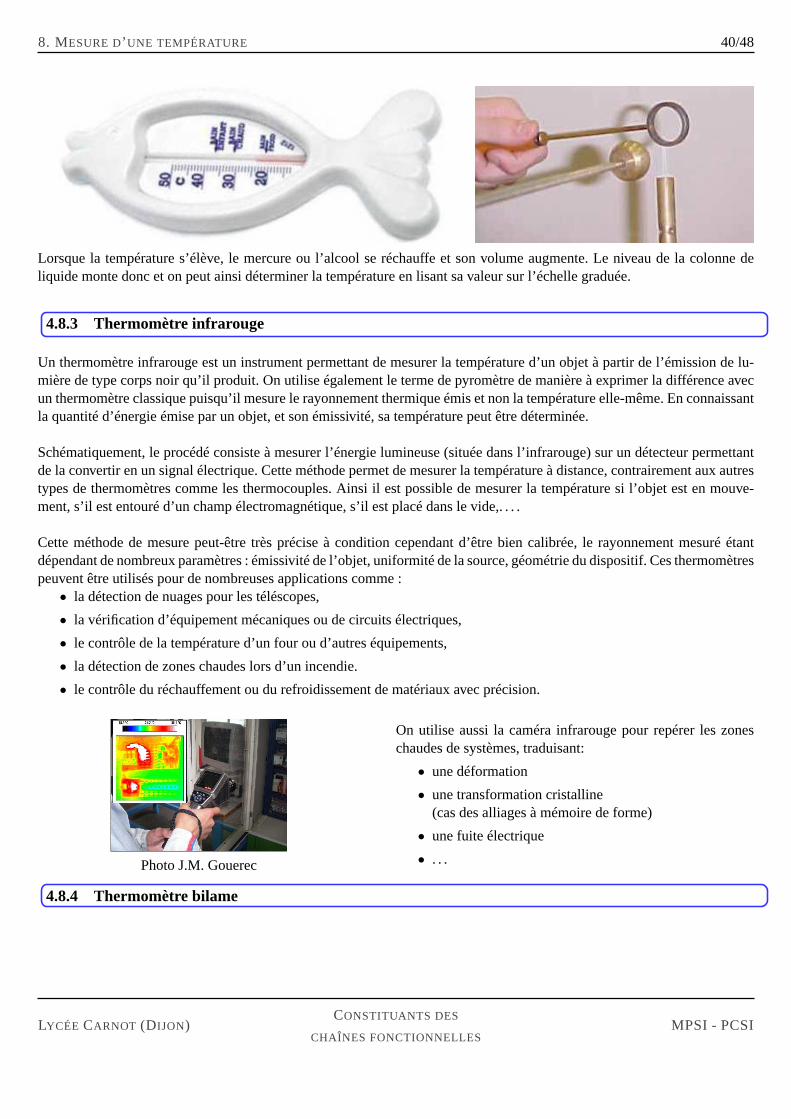
4.8.2 Thermomètre à liquide
Les thermomètres à liquide sont fondés sur le principe de la dilatation d’un liquide lors d’un échauffement et de sa rétractionlors d’un refroidissement. Le thermomètre est fait d’un tube capillaire sousvide rempli de mercure (1717 par Fahrenheit) oud’alcool (1654 par Le Grand Duc de Toscane). Ces derniers ont dutoluol ou du créosote comme liquide, l’alcool proprementdit bout à 78C, ce qui ne permet pas de faire des thermomètres qui vont au-delà de cette température.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
8. MESURE D’ UNE TEMPÉRATURE 40/48
Lorsque la température s’élève, le mercure ou l’alcool se réchauffe etson volume augmente. Le niveau de la colonne deliquide monte donc et on peut ainsi déterminer la température en lisant sa valeur sur l’échelle graduée.
4.8.3 Thermomètre infrarouge
Un thermomètre infrarouge est un instrument permettant de mesurer la température d’un objet à partir de l’émission de lu-mière de type corps noir qu’il produit. On utilise également le terme de pyromètrede manière à exprimer la différence avecun thermomètre classique puisqu’il mesure le rayonnement thermique émis et non la température elle-même. En connaissantla quantité d’énergie émise par un objet, et son émissivité, sa température peut être déterminée.
Schématiquement, le procédé consiste à mesurer l’énergie lumineuse (située dans l’infrarouge) sur un détecteur permettantde la convertir en un signal électrique. Cette méthode permet de mesurer la température à distance, contrairement aux autrestypes de thermomètres comme les thermocouples. Ainsi il est possible de mesurer la température si l’objet est en mouve-ment, s’il est entouré d’un champ électromagnétique, s’il est placé dans levide,. . . .
Cette méthode de mesure peut-être très précise à condition cependant d’être bien calibrée, le rayonnement mesuré étantdépendant de nombreux paramètres : émissivité de l’objet, uniformité de la source, géométrie du dispositif. Ces thermomètrespeuvent être utilisés pour de nombreuses applications comme :• la détection de nuages pour les téléscopes,
• la vérification d’équipement mécaniques ou de circuits électriques,
• le contrôle de la température d’un four ou d’autres équipements,
• la détection de zones chaudes lors d’un incendie.
• le contrôle du réchauffement ou du refroidissement de matériaux avec précision.
Photo J.M. Gouerec
On utilise aussi la caméra infrarouge pour repérer les zoneschaudes de systèmes, traduisant:
• une déformation
• une transformation cristalline(cas des alliages à mémoire de forme)
• une fuite électrique
• . . .
4.8.4 Thermomètre bilame
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
8. MESURE D’ UNE TEMPÉRATURE 41/48
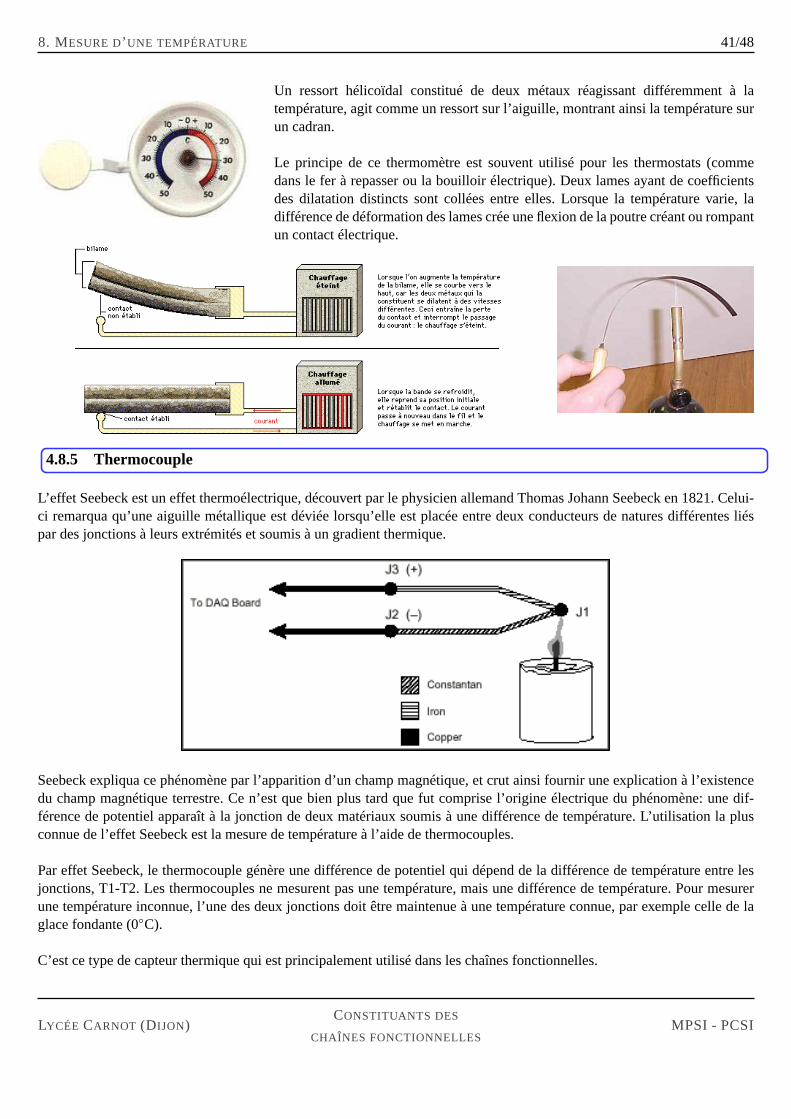
Un ressort hélicoïdal constitué de deux métaux réagissant différemment àlatempérature, agit comme un ressort sur l’aiguille, montrant ainsi la température surun cadran.
Le principe de ce thermomètre est souvent utilisé pour les thermostats (commedans le fer à repasser ou la bouilloir électrique). Deux lames ayant de coefficientsdes dilatation distincts sont collées entre elles. Lorsque la température varie,ladifférence de déformation des lames crée une flexion de la poutre créantou rompantun contact électrique.
4.8.5 Thermocouple
L’effet Seebeck est un effet thermoélectrique, découvert par le physicien allemand Thomas Johann Seebeck en 1821. Celui-ci remarqua qu’une aiguille métallique est déviée lorsqu’elle est placée entre deux conducteurs de natures différentes liéspar des jonctions à leurs extrémités et soumis à un gradient thermique.
Seebeck expliqua ce phénomène par l’apparition d’un champ magnétique, et crut ainsi fournir une explication à l’existencedu champ magnétique terrestre. Ce n’est que bien plus tard que fut comprise l’origine électrique du phénomène: une dif-férence de potentiel apparaît à la jonction de deux matériaux soumis à une différence de température. L’utilisation la plusconnue de l’effet Seebeck est la mesure de température à l’aide de thermocouples.
Par effet Seebeck, le thermocouple génère une différence de potentiel qui dépend de la différence de température entre lesjonctions, T1-T2. Les thermocouples ne mesurent pas une température, mais une différence de température. Pour mesurerune température inconnue, l’une des deux jonctions doit être maintenue à une température connue, par exemple celle de laglace fondante (0C).
C’est ce type de capteur thermique qui est principalement utilisé dans les chaînes fonctionnelles.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
Chapitre 5
Schématisation
Normes NF ISO 11727 - NF ISO 1219 à partir du Guide du Dessinateur Industriel d’André Chevalier et éditer chez Hachette.
5.1 Symboles normalisés pneumatique et hydraulique
5.1.1 Distribution de l’énergie
5.1.1.1 Commandes
42
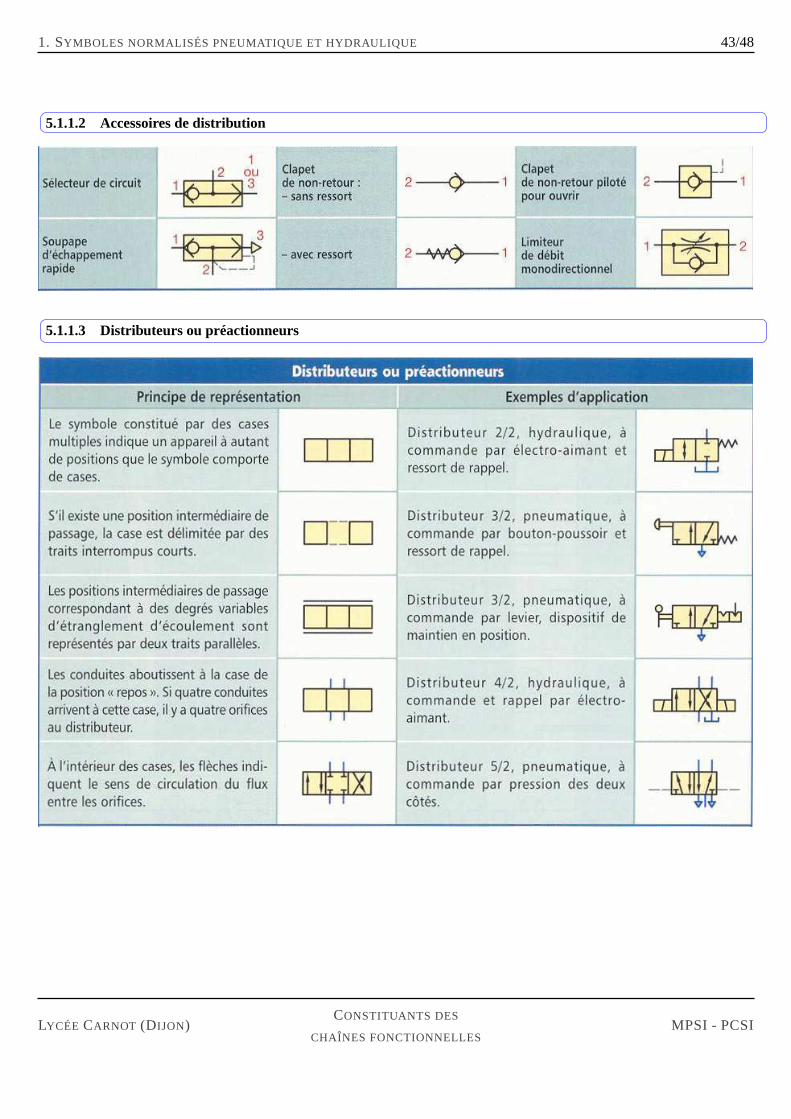
1. SYMBOLES NORMALISÉS PNEUMATIQUE ET HYDRAULIQUE 43/48
5.1.1.2 Accessoires de distribution
5.1.1.3 Distributeurs ou préactionneurs
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
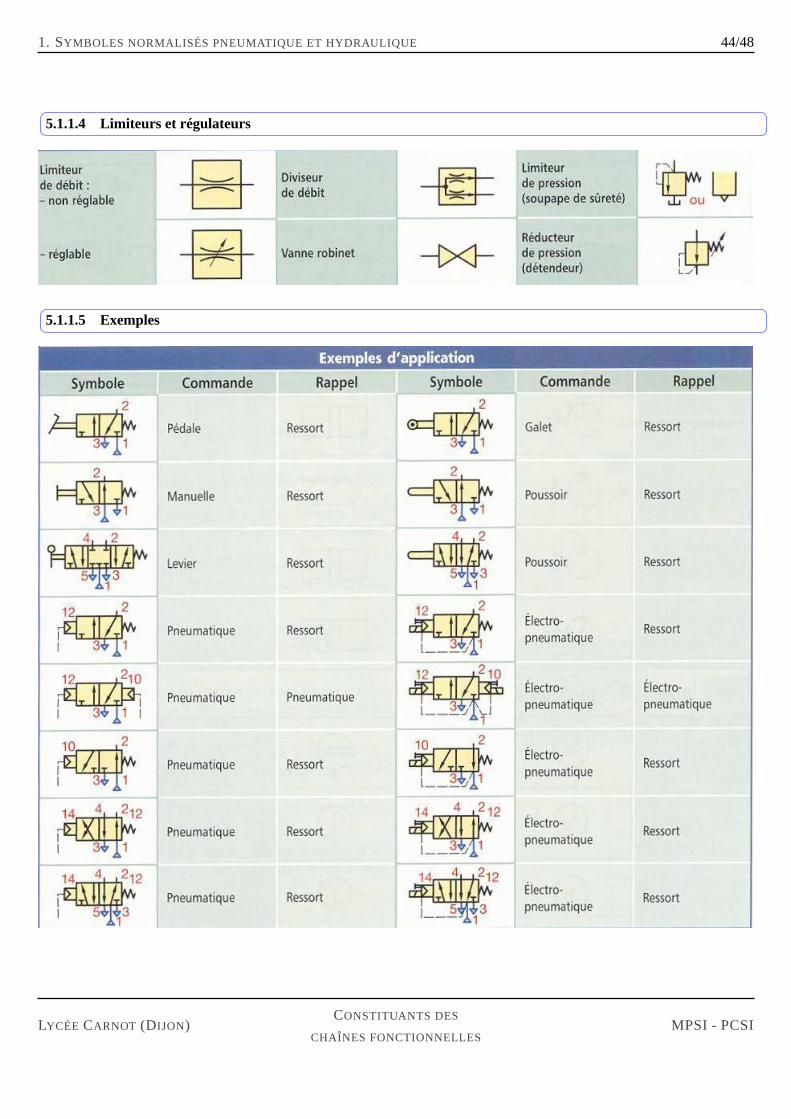
1. SYMBOLES NORMALISÉS PNEUMATIQUE ET HYDRAULIQUE 44/48
5.1.1.4 Limiteurs et régulateurs
5.1.1.5 Exemples
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
1. SYMBOLES NORMALISÉS PNEUMATIQUE ET HYDRAULIQUE 45/48
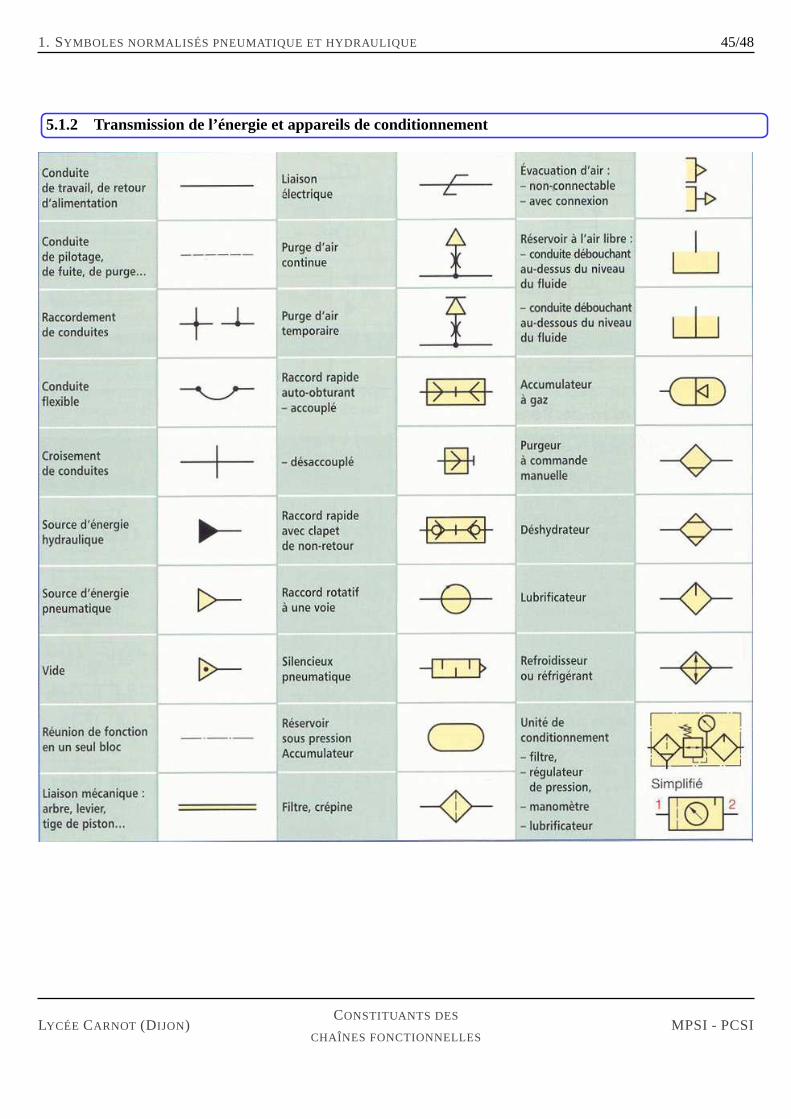
5.1.2 Transmission de l’énergie et appareils de conditionnement
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
1. SYMBOLES NORMALISÉS PNEUMATIQUE ET HYDRAULIQUE 46/48
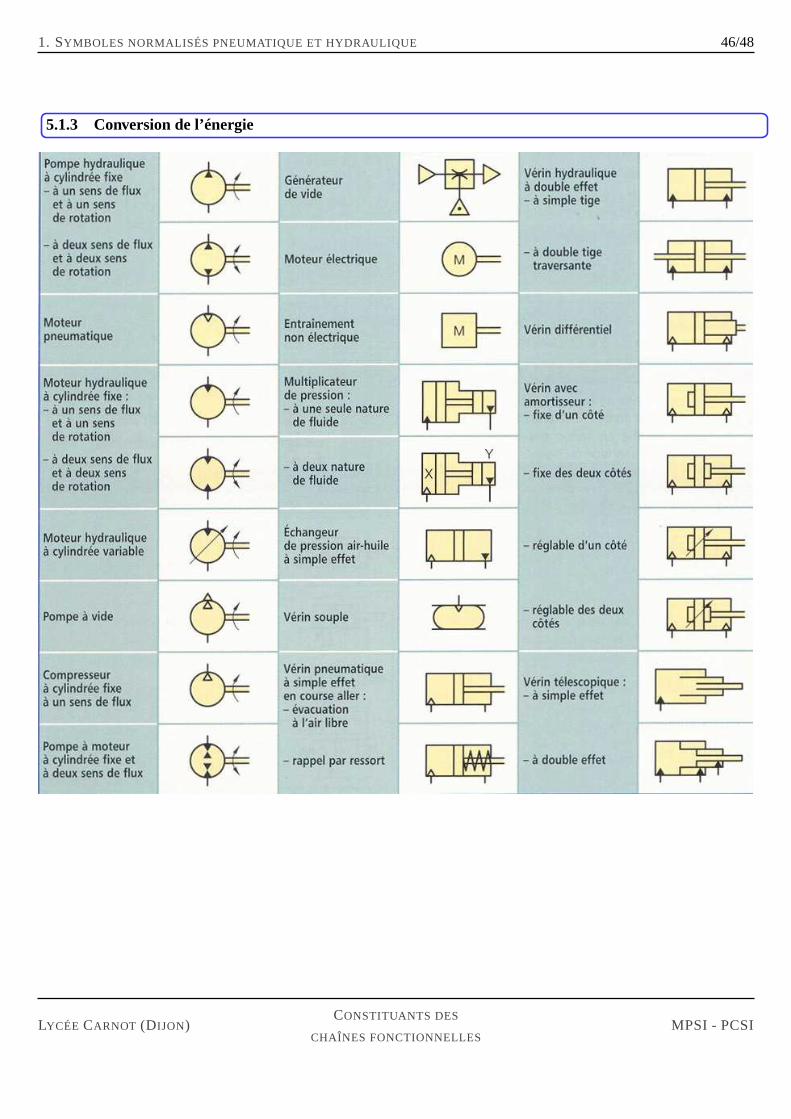
5.1.3 Conversion de l’énergie
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. SCHÉMAS 47/48
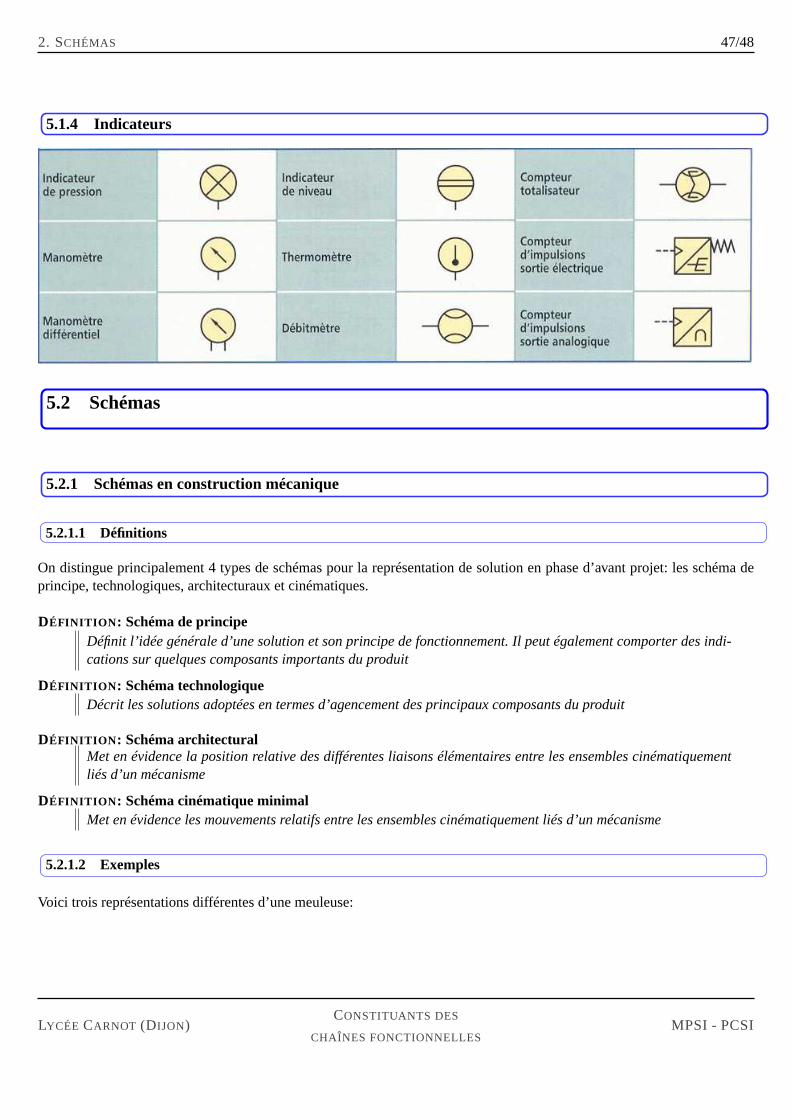
5.1.4 Indicateurs
5.2 Schémas
5.2.1 Schémas en construction mécanique
5.2.1.1 Définitions
On distingue principalement 4 types de schémas pour la représentation de solution en phase d’avant projet: les schéma deprincipe, technologiques, architecturaux et cinématiques.
DÉFINITION : Schéma de principeDéfinit l’idée générale d’une solution et son principe de fonctionnement. Il peut également comporter des indi-cations sur quelques composants importants du produit
DÉFINITION : Schéma technologiqueDécrit les solutions adoptées en termes d’agencement des principaux composants du produit
DÉFINITION : Schéma architecturalMet en évidence la position relative des différentes liaisons élémentaires entre les ensembles cinématiquementliés d’un mécanisme
DÉFINITION : Schéma cinématique minimalMet en évidence les mouvements relatifs entre les ensembles cinématiquement liés d’un mécanisme
5.2.1.2 Exemples
Voici trois représentations différentes d’une meuleuse:
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI
2. SCHÉMAS 48/48
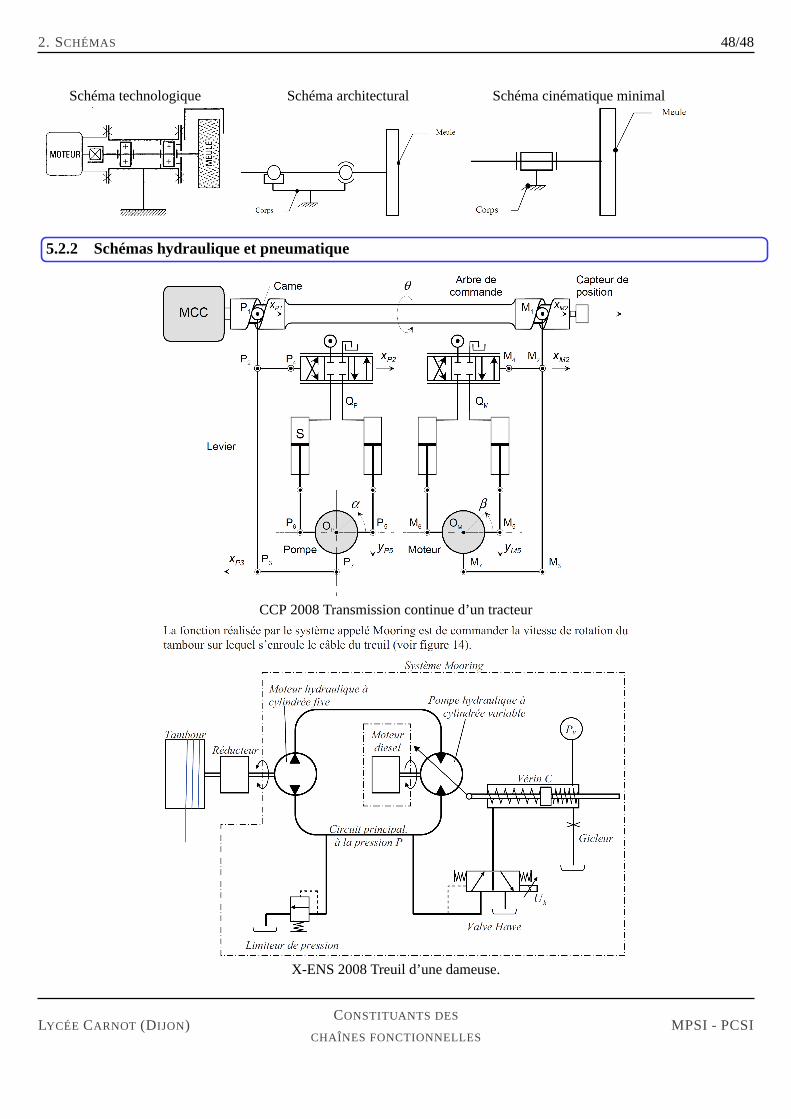
Schéma technologique Schéma architectural Schéma cinématique minimal
5.2.2 Schémas hydraulique et pneumatique
CCP 2008 Transmission continue d’un tracteur
X-ENS 2008 Treuil d’une dameuse.
LYCÉE CARNOT (DIJON)CONSTITUANTS DES
CHAÎNES FONCTIONNELLESMPSI - PCSI