computational intelligence: methods and applications lecture 12 bayesian decisions: foundation of...
TRANSCRIPT
Computational Intelligence: Computational Intelligence: Methods and ApplicationsMethods and Applications
Lecture 12
Bayesian decisions: foundation of learning
Włodzisław Duch
Dept. of Informatics, UMK
Google: W Duch
LearningLearningLearningLearning• Learning from data requires a model of data.
• Traditionally parametric models of different phenomena were developed in science and engineering; parametric models are easy to interpret, so if the phenomenon is simple enough and a theory exist construct a model and use algorithmic approach.
• Empirical non-parametric modeling is data driven, goal oriented. It dominates in biological systems. Learn from data!
• Given some examples = training data, create a model of data that answers specific question, estimating those characteristics of the data that may be useful to make future predictions.
• Learning = estimate parameters of the (non-parametric) model; paradoxically, non-parametric models have a lot of parameters.
• Many other approaches to learning exist, but no time to explore ...
ProbabilityProbabilityProbabilityProbabilityTo talk about prediction errors probability concepts are needed.
Samples XX divided into K categories, called classes 1 ... K
More general, i is a state of nature that we would like to predict.
Pk = P(k), a priori (unconditional) probability of observing X k
1
( )1;
Kk
k kk
NP P
N
If nothing else is known than one should predict that a new sample X belongs to the majority class:
; arg maxc kk
c P X
Majority classifier: assigns all new X to the most frequent class.
Example: weather prediction system – the weather tomorrow will be the same as yesterday (high accuracy prediction!).
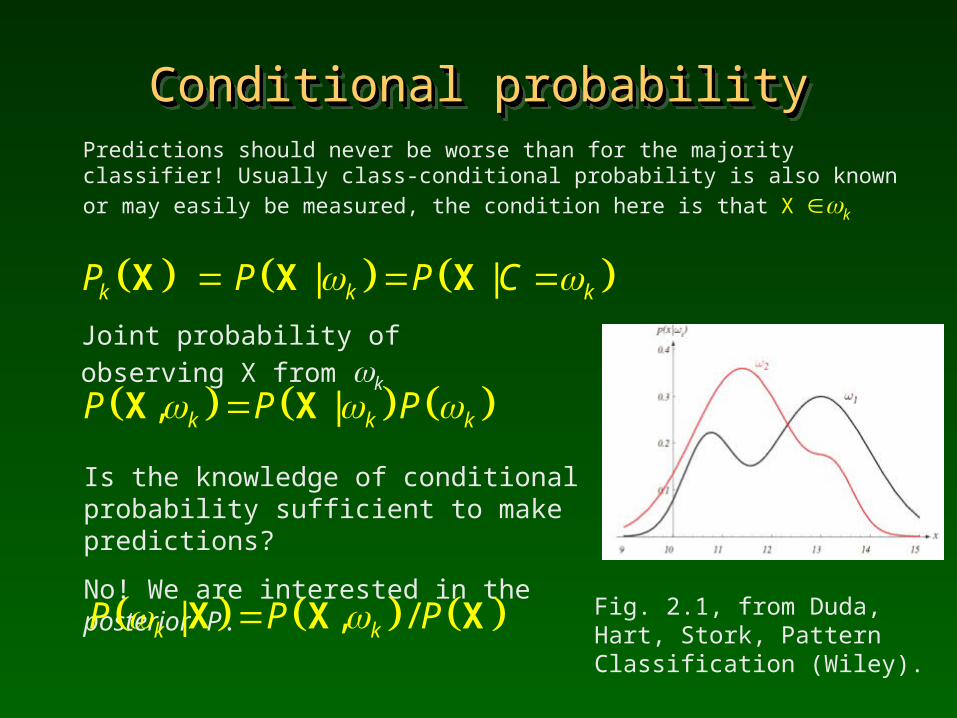
Conditional probabilityConditional probabilityConditional probabilityConditional probabilityPredictions should never be worse than for the majority classifier! Usually class-conditional probability is also known or may easily be
measured, the condition here is that X k
| | k k kP P P C X X X
Joint probability of observing X from k
Is the knowledge of conditional probability sufficient to make predictions?
No! We are interested in the posterior P.
, | k k kP P P X X
| , / k kP P P X X X Fig. 2.1, from Duda, Hart, Stork, Pattern Classification (Wiley).
Bayes ruleBayes ruleBayes ruleBayes rulePosterior conditional probabilities are normalized:
Bayes rule for 2 classes isderived from this:
P(X) is an unconditional probability of selecting sample X; usually it is just 1/n, where n=number of all samples.
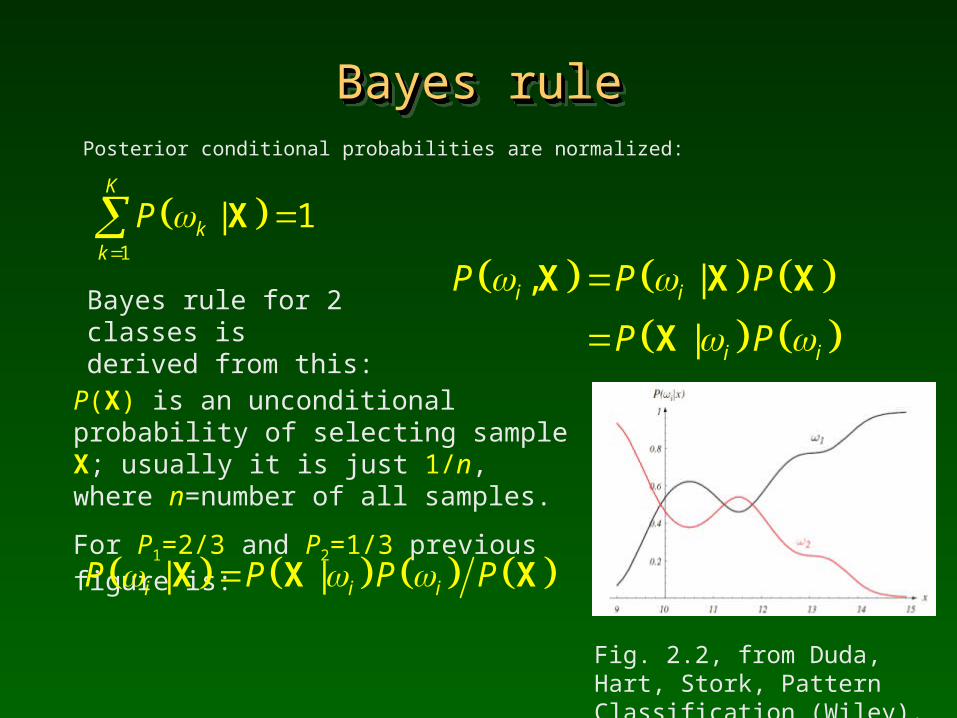
For P1=2/3 and P2=1/3 previous figure is:
1
| 1K
kk
P
X
, |
|
i i
i i
P P P
P P
X X X
X
| |i i iP P P P X X X
Fig. 2.2, from Duda, Hart, Stork, Pattern Classification (Wiley).
Bayes decisionsBayes decisionsBayes decisionsBayes decisionsBayes decision: given a sample X select class 1 if:
Probability of an error is:
Average error is:
1 2| |P P X X
1 2| min | , |P P P X X X
| |P E P P P d
X X X X
Bayes decision rule minimizes average error selecting smallest P(|X)
Using Bayes rule and multiplying both sides by P(X):
1 1 2 2| |P P P P X X
LikelihoodLikelihoodLikelihoodLikelihood
Bayesian approach to learning: use data to model probabilities.
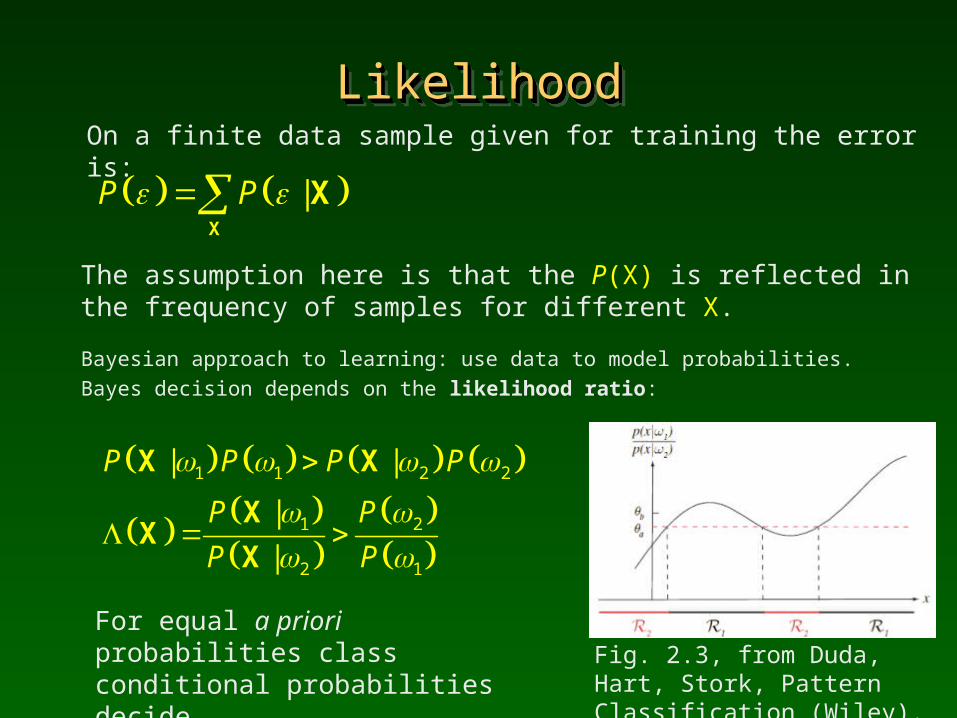
Bayes decision depends on the likelihood ratio:
For equal a priori probabilities class conditional probabilities decide.
On a finite data sample given for training the error is:
|P P X
X
The assumption here is that the P(X) is reflected in the frequency of samples for different X.
1 1 2 2
1 2
2 1
| |
|
|
P P P P
P P
P P
X X
XX
X
Fig. 2.3, from Duda, Hart, Stork, Pattern Classification (Wiley).
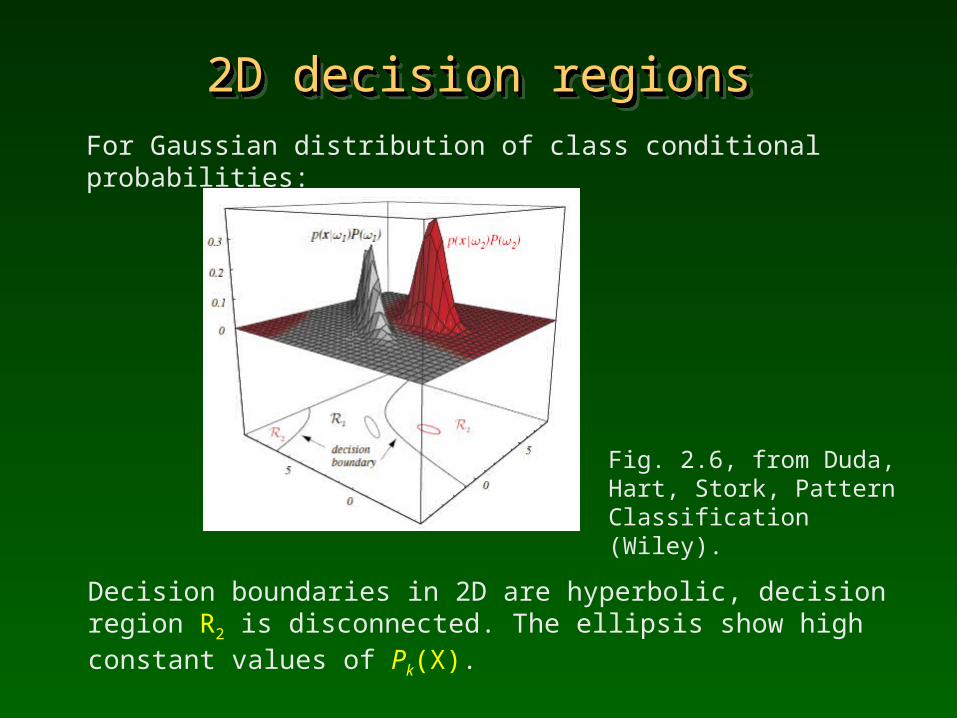
2D decision regions2D decision regions2D decision regions2D decision regionsFor Gaussian distribution of class conditional probabilities:
Decision boundaries in 2D are hyperbolic, decision region R2 is disconnected. The ellipsis show high constant values of Pk(X).
Fig. 2.6, from Duda, Hart, Stork, Pattern Classification (Wiley).
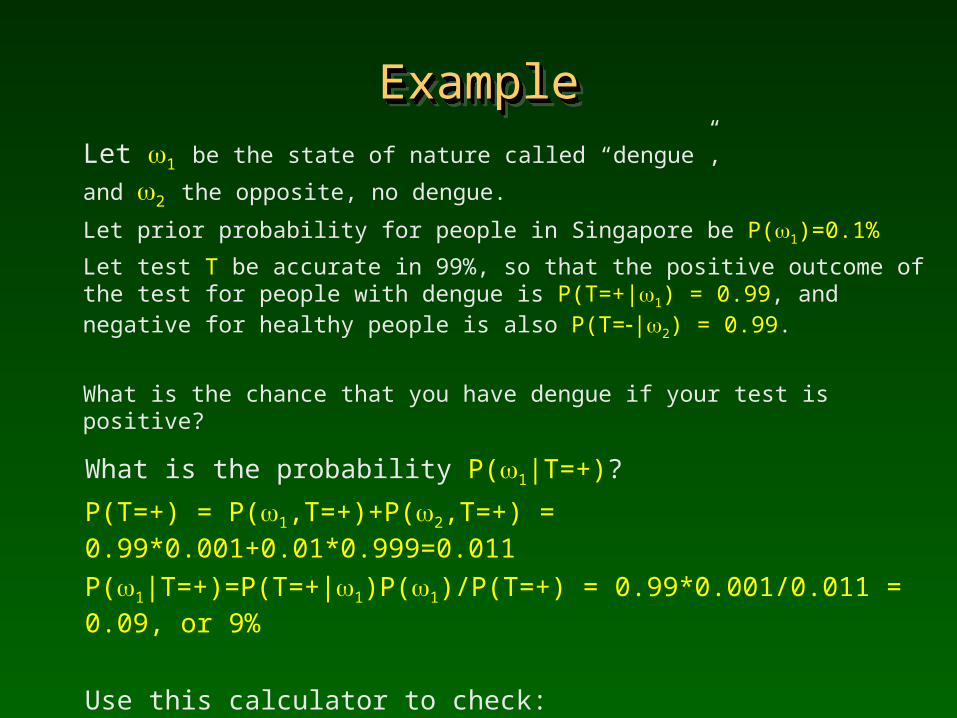
ExampleExampleExampleExample
Let 1 be the state of nature called “dengue”,
and 2 the opposite, no dengue.
Let prior probability for people in Singapore be P(1)=0.1%
Let test T be accurate in 99%, so that the positive outcome of the test for people with dengue is P(T=+|1) = 0.99, and negative for healthy people is also P(T=|2) = 0.99.
What is the chance that you have dengue if your test is positive?
What is the probability P(1|T=+)?
P(T=+) = P(1,T=+)+P(2,T=+) = 0.99*0.001+0.01*0.999=0.011
P(1|T=+)=P(T=+|1)P(1)/P(T=+) = 0.99*0.001/0.011 = 0.09, or 9%
Use this calculator to check:
http://StatPages.org/bayes.html
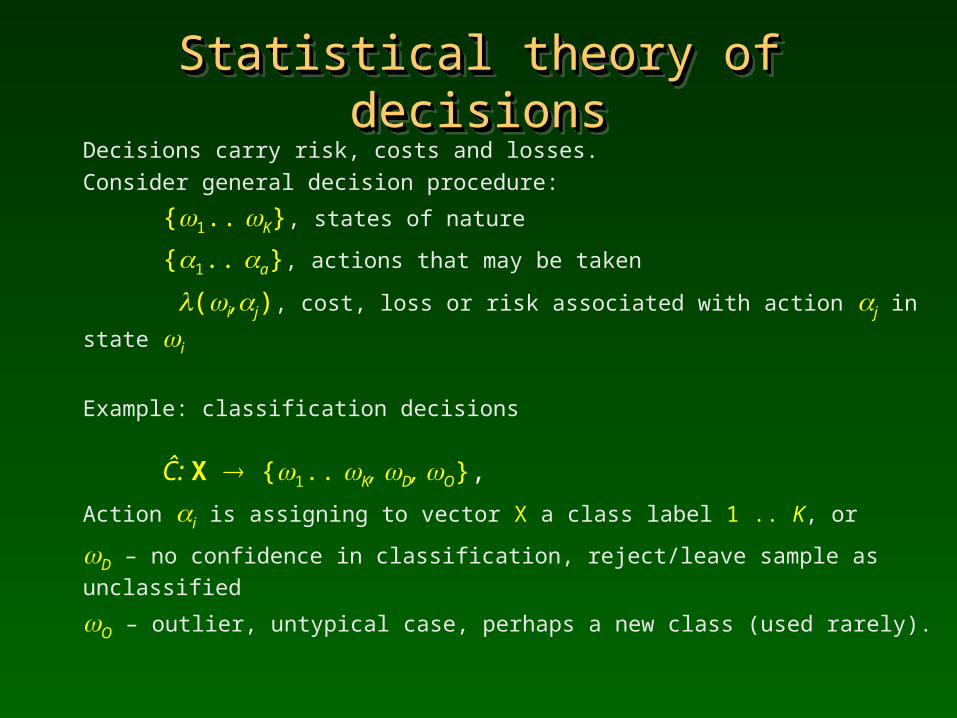
Statistical theory of decisionsStatistical theory of decisionsStatistical theory of decisionsStatistical theory of decisionsDecisions carry risk, costs and losses.
Consider general decision procedure:
{1.. K}, states of nature
{1.. a}, actions that may be taken
(i,j), cost, loss or risk associated with action j in state i
Example: classification decisions
Ĉ: X {1.. K, D, O},
Action i is assigning to vector X a class label 1 .. K, or
D – no confidence in classification, reject/leave sample as unclassified
O – outlier, untypical case, perhaps a new class (used rarely).
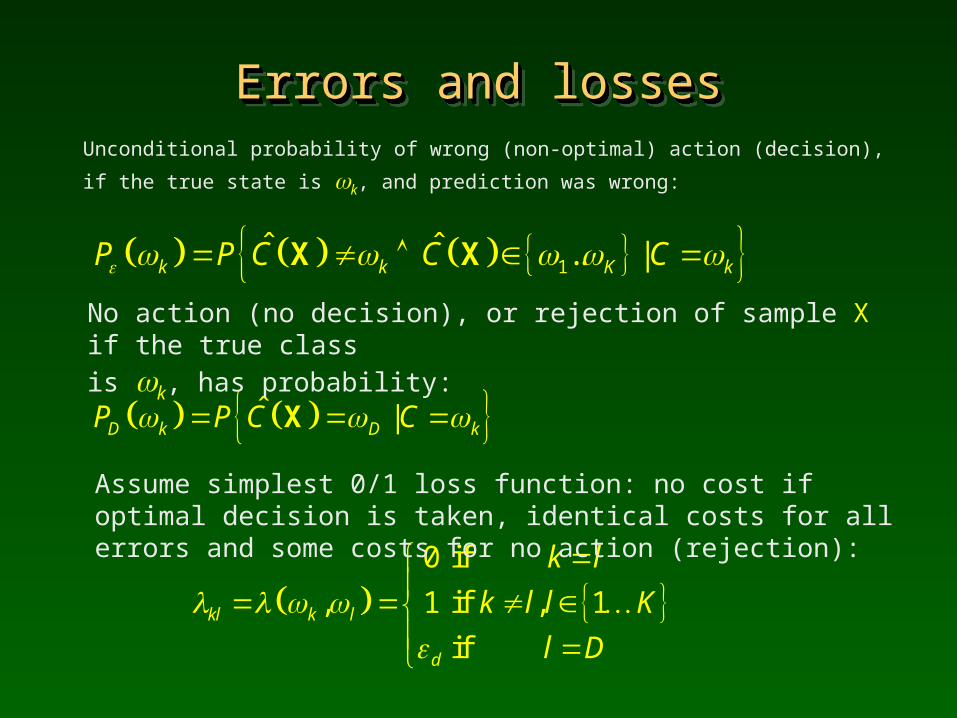
Errors and lossesErrors and lossesErrors and lossesErrors and lossesUnconditional probability of wrong (non-optimal) action (decision),
if the true state is k, and prediction was wrong:
1ˆ ˆ .. |k k K kP P C C C X X
ˆ |D k D kP P C C X
No action (no decision), or rejection of sample X if the true class
is k, has probability:
0 if
, 1 if , 1
ifkl k l
d
k l
k l l K
l D
Assume simplest 0/1 loss function: no cost if optimal decision is taken, identical costs for all errors and some costs for no action (rejection):
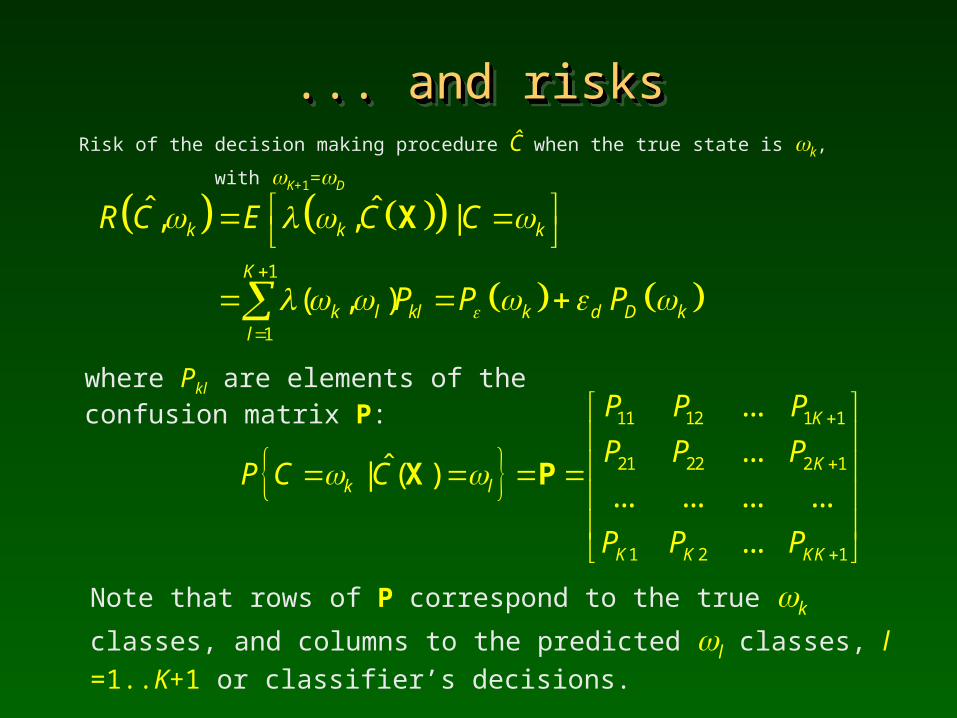
... and risks... and risks... and risks... and risksRisk of the decision making procedure Ĉ when the true state is k,
with K+1=D
where Pkl are elements of the confusion matrix P:
1
1
ˆ ˆ, , |
( , )
k k k
K
k l kl k d D kl
R C E C C
P P P
X
11 12 1 1
21 22 2 1
1 2 1
...
...ˆ| ( )... ... ... ...
...
K
Kk l
K K KK
P P P
P P PP C C
P P P
X P
Note that rows of P correspond to the true k classes, and columns to
the predicted l classes, l =1..K+1 or classifier’s decisions.
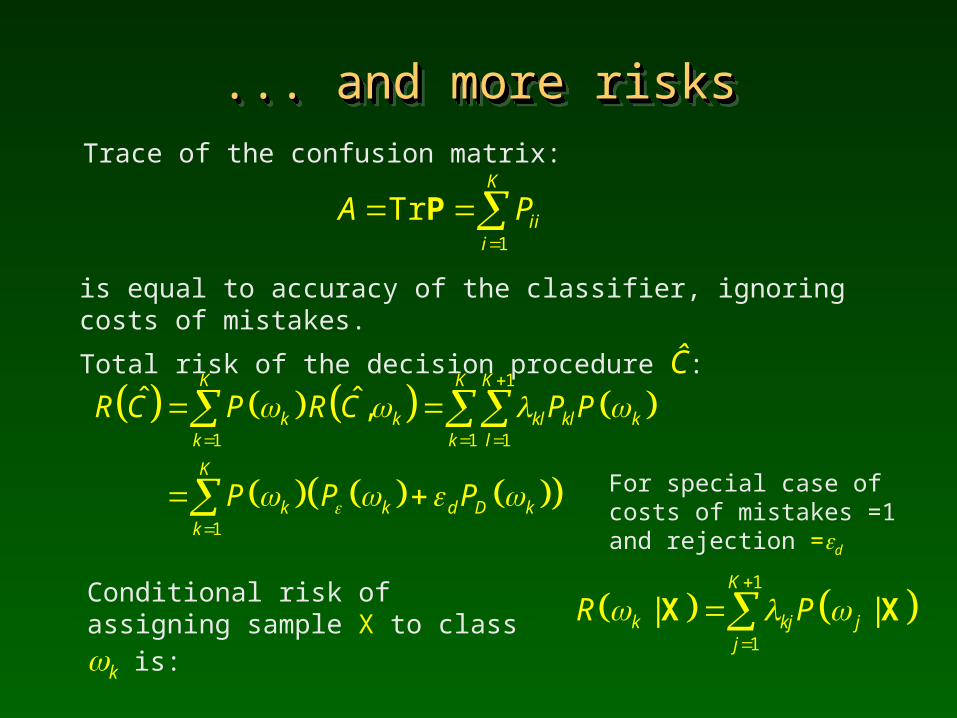
... and more risks... and more risks... and more risks... and more risksTrace of the confusion matrix:
is equal to accuracy of the classifier, ignoring costs of mistakes.
Total risk of the decision procedure Ĉ:
1
Tr K
iii
A P
P
1
1 1 1
1
ˆ ˆ ,K K K
k k kl kl kk k l
K
k k d D kk
R C P R C P P
P P P
1
1
| |K
k kj jj
R P
X XConditional risk of assigning sample X
to class k is:
For special case of costs of mistakes =1 and rejection =d