computed-torque plus robust adaptive compensation control for robot manipulator with structured and...
TRANSCRIPT

IMA Journal of Mathematical Control and Information (2014) Page 1 of 16doi:10.1093/imamci/dnu024
Computed-torque plus robust adaptive compensation control for robotmanipulator with structured and unstructured uncertainties
Yuan Chen, Guangying Ma, Shuxia Lin, Shurong Ning and Jun Gao∗
School of Mechanical, Electrical & Information Engineering, Shandong University, Weihai, China∗Corresponding author. Email: [email protected]
[Received on 25 July 2013; revised on 20 January 2014; accepted on 3 May 2014]
A computed-torque plus robust adaptive compensation control scheme (CTRACC) is proposed for trajec-tory tracking control of a robot manipulator with uncertain dynamics. To eliminate structured and unstruc-tured uncertainties, an adaptive fuzzy control algorithm and a robust H∞ control mode are incorporatedin the conventional computed-torque controller. The adaptive fuzzy control algorithm is employed tocompensate for structured uncertainties, and the robust H∞ control model is designed to eliminate theeffects of unstructured uncertainties and approximation errors. The convergence and the stability of theCTRACC approach are proved by using Lyapunov’s direct method. Performance comparisons betweenthe CTRACC approach and the conventional computed-torque controller are carried out. The validity ofthe CTRACC approach is investigated by numerical simulations of a two-link rotary robot manipulatorand experiments conducted on a real six degrees of freedom robot manipulator.
Keywords: robot manipulator; structured and unstructured uncertainties; computed-torque control; robustH∞ control; adaptive fuzzy control.
1. Introduction
A robot manipulator is a multi-variable non-linear system, and is frequently subjected to structured andunstructured uncertainties even in a well-structured setting for industrial application (Ge et al., 2012).A computed-torque controller is a powerful non-linear control scheme which has been widely usedin control of the robot manipulator (Astrom & Wittenmark, 1995). Unfortunately, this control methodeasily suffers from several kinds of uncertainties such as modelling errors, plant parameter variationsand unknown disturbances. These uncertainties may degrade the control performances.
To alleviate these uncertainties, some well-known adaptive and robust control approaches have beenincorporated in the conventional computed-torque controller (Li & Sun, 2009; Conway & Horowitz,2010; Rahideh et al., 2012; Müller & Hufnagel, 2012; Zhao & Ji, 2012; Shen et al., 2013). Adaptivecontrol approach with strong online self-adaptive capability is very effective in coping with structureduncertainties. However, it cannot effectively eliminate the effects of unstructured uncertainties on thecontrol performances (Wun et al., 2013). Robust control approach with less computation burden is moreeffective for the fast response and real-time control in the presence of unstructured uncertainties. Its dis-advantage, however, is the lack of self-adjustment of model parameters to deal with structured uncer-tainties such as unknown kinematic parameters or non-linear coupled dynamic model (Dou & Wang,2013). To simultaneously achieve the advantages of both adaptive and robust control approaches, manyrobust adaptive control strategies (Yao et al., 2012; Man et al., 1995; Yang et al., 2011; Hoseini et al.,2011; Han & Lee, 2012) have been proposed for some non-linear systems with uncertain dynamics.However, some robust adaptive controllers (Yao et al., 2012; Man et al., 1995; Yang et al., 2011) havedealt with a single compensation control problem of some structured uncertainties such as non-linear
c© The authors 2014. Published by Oxford University Press on behalf of the Institute of Mathematics and its Applications. All rights reserved.
IMA Journal of Mathematical Control and Information Advance Access published July 4, 2014 at U
niversity of Waikato L
ibrary on July 12, 2014http://im
amci.oxfordjournals.org/
Dow
nloaded from

2 of 16 Y. CHEN ET AL.
friction or uncertain kinematic parameters, while others (Hoseini et al., 2011; Han & Lee, 2012) havejust provided an overall compensation control for structured and unstructured uncertainties. Most ofthem have paid no attention to the separate compensation control for these uncertainties. As a matterof fact, there are great differences between structured and unstructured uncertainties in many ways, forexample, structured uncertainties are characterized by the existence of an upper bound, but unstructureduncertainties may be unbounded. These characteristics should be taken into account in the explorationof the control scheme for a robot manipulator with uncertain dynamics. Therefore, this paper proposes arobust adaptive compensation control scheme to separately compensate for structured and unstructureduncertainties.
Adaptive fuzzy compensation control algorithms have also been contained in the conventionalcomputed-torque controller. For example, Song et al. (2005) proposed an adaptive fuzzy computed-torque control scheme to solve the trajectory tracking problem of a robot manipulator with a knownupper bound of uncertainties. Chen et al. (2001) presented a computed-torque plus adaptive fuzzycompensation controller to improve the trajectory tracking control performance of an industrial robot.Mohan & Bhanot (2007) conducted an investigation on three kinds of computed-torque plus adaptivefuzzy control algorithms. However, most of them determine their fuzzy logic rules by virtue of someexperimental data and designers’ experiences, which will decrease the response speed and give seri-ous limitations on the compensation control performances of uncertainties. Also, some adaptive fuzzycontrol algorithms based on lookup tables may suffer from a tedious and cumbersome building up ofthe lookup table. To improve the self-adaptive control performances of the conventional computed-torque controller, this paper develops an adaptive fuzzy compensation control algorithm to approximatestructured uncertainties with the unknown upper bound. The main advantage of the adaptive fuzzy com-pensation control algorithm is that no matter how many rules are utilized in the fuzzy logic system, onlyone tuning parameter will be adjusted online, which significantly reduces the computation burden.
In this paper, the dynamic model of a robot manipulator is separated as three main subsystems:nominal system with precise dynamic parameters, structured uncertain system and unstructured uncer-tain system. Based on a computed-torque controller, a robust adaptive compensation control schemecombining an adaptive fuzzy control algorithm with a robust H∞ control model is proposed for thetrajectory tracking control of a robot manipulator with structured and unstructured uncertainties. Theadaptive fuzzy control algorithm is employed to approximate structured uncertainties, and the robustH∞ control model is designed to eliminate the effects of unstructured uncertainties and approxima-tion errors. The validity of the proposed control scheme is demonstrated by numerical simulations of atwo-link rotary robot manipulator and experiments conducted on a real 6-DOF robot manipulator.
The remainder of this paper is organized as follows. Following the introduction, Section 2 dealswith some robotic control problem. Section 3 is devoted to the design of a robust adaptive compensa-tion controller. In Section 4, the validity of the proposed control scheme is investigated by numericalsimulations of a two-link rotary robot manipulator. Section 5 demonstrates some experimental results.Some conclusions are finally included in Section 6.
2. Robotic control problem
The dynamic model of an n-link robot manipulator is characterized by a set of highly non-linear andstrongly coupled second-order differential equations:
D(q)q + H(q, q)+ F(q, q)= τ (1)
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

COMPUTED-TORQUE PLUS ROBUST ADAPTIVE COMPENSATION CONTROL FOR ROBOT MANIPULATOR3 of 16
where D(q) is the n × n inertial matrix; H(q, q)= C(q, q)q + G(q), in which C(q, q)q denotes n vectorsrepresenting Coriolis and centrifugal forces, and G(q) denotes the gravity loading; F(q, q) includesfriction terms and external disturbances; q, q, q are n vectors of joint angular position, velocity andacceleration; and τ denotes n vectors of joint torque.
The conventional computed-torque control law can be written as follows:
τ0 = D(q)(qd + Kve + Kpe)+ H(q, q) (2)
where Kv and Kp are derivative and proportional constant matrices, respectively; qd , qd , qd ∈ Rn are thedesired trajectory vectors of joint position, velocity and acceleration, respectively; e = qd − q denotesthe trajectory tracking error; and D(q) and H(q) are the nominal parts of the actual parameters D(q) andH(q, q), respectively.
When compensation control scheme is attached to the conventional computed-torque controller inthe presence of uncertainties, the overall control law can be written as follows:
τ = τ0 + τc (3)
where τ0 denotes the control input torque of the conventional computed-torque controller defined byEquation (2) and τc expresses the control input torque of the compensation control scheme.
Substituting the overall control law τ into the dynamic Equation (1) yields the following closed-looptracking error dynamic equation:
x = Ax + B(ψ(χq)+ δ(χq)− D(q)−1τc) (4)
where χq = [q q q]T, A =[
0 I−Kp −Kv
], B =
[0I
], x = [e, e]T; structured uncertainties ψ(χq)=
D(q)−1(ΔD(q)q +ΔH(q, q)) result from the unknown kinematic parameters and the non-linear cou-pled dynamic model; and unstructured uncertainties δ(χq)= D(q)−1F(q, q) include the non-linear fric-tion and unknown external disturbance.
As a result, the fundamental control problem of a robot manipulator in the presence of these uncer-tainties is to determine the control algorithm for generating the control input torque τ , which drives therobotic states to closely follow a desired position trajectory qd(t), qd(t), qd(t).
3. Design of a robust adaptive compensation control scheme
A robust adaptive compensation control scheme attached to the conventional computed-torque con-troller is developed, and its block diagram is shown in Fig. 1. As a non-linear compensator, the adaptivefuzzy compensation control algorithm is employed to approximate the structured uncertainties ψ(χq)
in the closed-loop tracking error dynamic Equation (4), and the robust H∞ control model is designed toeliminate the effects of the unstructured uncertainties δ(χq) in the closed-loop tracking error dynamicEquation (4) on the tracking performances.
As shown in Fig. 1, the robust adaptive compensation control scheme takes the actual output vectorχe = [q q]T as the input variables, and utilizes the trajectory tracking errors x = [e, e]T as the tuningparameters of the adaptive fuzzy compensation control algorithm. Furthermore, the compensation con-trol torque τc is the sum of the control torques of the adaptive fuzzy control algorithm and the robust H∞control model, namely τc = D(q)Φh + D(q)Φf , in which Φh and Φf are the output vectors of the robustH∞ control model and the adaptive fuzzy control algorithm, respectively. Hence, the corresponding
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

4 of 16 Y. CHEN ET AL.
Fig. 1. Block diagram of the computed-torque plus robust adaptive compensation control scheme.
state space tracking error dynamic Equation (4) can be rewritten as follows:
x = Ax + B(ψ(χq)+ δ(χq)− (Φh +Φf )) (5)
where ψ(χq)= D(q)−1(ΔD(q)q +ΔH(q, q)) and δ(χq)= D(q)−1F(q, q).
3.1 Adaptive fuzzy compensation control algorithm for structured uncertainties
The basic structure of a fuzzy control system consists of the following four parts: fuzzifier, fuzzy rulebase, fuzzy inference and defuzzifier (Wang, 1997). Specifically, the jth output of the fuzzy controlsystem with an IF-THEN rule base, product inference engine, singleton fuzzifier and centre averagedefuzzifier can be expressed as follows:
yj =∑M
l=1
(∏ni=1 μAl
i(xi))
ylj∑M
l=1
(∏ni=1 μAl
i(xi)) =
M∑l=1
yljξl(x)=ΘT
j ξ(x) (6)
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

COMPUTED-TORQUE PLUS ROBUST ADAPTIVE COMPENSATION CONTROL FOR ROBOT MANIPULATOR5 of 16
where ylj is the point at which the fuzzy membership function achieves its maximum value, Θj =
[y1j , . . . , yl
j, . . . , yMj ]T denotes a vector of the tuning parameter and ξ(x)= [ξ1(x), . . . , ξl(x), . . . , ξM (x)]T
is a vector of the fuzzy basis function, in which the lth fuzzy basis function can be defined as follows:
ξl(x)=∏n
i=1 μAli(xi)∑M
l=1
(∏ni=1 μAl
i(xi)) (7)
The overall output vector of the fuzzy control system can be written as follows:
y =ΘTξ(x) (8)
where ΘT = [Θ1,Θ2, . . . ,Θm]T is an adaptive parameter matrix and ξ(x)= [ξ1(x), . . . , ξl(x), . . . ,ξM (x)]T is a vector of the fuzzy basis function.
To approximate the structured uncertainties ψ(χq) in the closed-loop tracking error dynamicEquation (4), the output vector Φf (x, Θ) of the adaptive fuzzy control system and its adaptive controllaw are designed as follows:
Φf (x, Θ)= −ρ(x, Θ) tanh
(ρ(x, Θ)BTPx
κ
)(9)
˙Θ = −λΘ + Lξ(x)‖BTPx‖ (10)
where ρ(x, Θ)= ΘTξ(x) is the output vector of the adaptive fuzzy controller defined by Equation(8); x = [q q]T is the input vector of the adaptive fuzzy controller; λ ∈ (0, ∞), L = diag{l1, l2, . . . , lp},li ∈ (0, ∞), p is the dimension of Θ , ε is an arbitrary small positive constant, which is selected by thedesigner; and P is a symmetric positive definite matrix satisfying a Riccati-like equation.
As a result, the control torque τf of the adaptive fuzzy controller can be expressed as follows:τf = D(q)Φf (x, Θ), where Θ is the adaptive parameter matrix.
3.2 Derivation of a robust H∞ compensation control model and stability analysis
To find the adaptive law of the adaptive fuzzy control algorithm and to ensure boundedness of theinvolved signals in the closed-loop tracking error dynamic equation, the following assumption andtheorem are used.
Assumption 1 The term of D(q)−1 and the structured uncertainties ofψ(χq) in the closed-loop trackingerror dynamic Equation (4) are bounded by bmin � ‖D(q)−1‖ � bmax and ‖ψ(χq)‖ �ΘTξ(x)+ ε, whereξ(x) is a vector of the fuzzy base function in Equation (7); Θ is the adaptive parameter of the fuzzycontrol system; and ε is an arbitrary small positive constant.
Theorem 1 If there exists a continuous function V(•) : Rn → R+ for the continuous system describedby Equation (5) with the following properties: (1) there are scalars q � 1,ω1 > 0 and ω2 > 0 such thatω1‖x‖q � V(x)�ω2‖x‖q for all x(t) ∈ Rn; (2) there are scalars V and V , with 0 � V � V <∞, such thatwhenever V � V(x)� V , V is continuously differentiable and V = (∂V/∂t)f (x, t)� −qα[V(x)− V ] forall t ∈ R+, then system (5) is uniformly exponentially convergent to S =Φ(r) with rate α.
The proof was given by Corless & Leitmann (1996).
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

6 of 16 Y. CHEN ET AL.
To eliminate unstructured uncertainties, this paper designs the following robust H∞ control law Φh:
Φh = R−1BTPx (11)
where R is a gain matrix; x = [q q]T is the input vector of the robust H∞ control model; and R, B, Pare matrices that satisfy the following Riccati-like equation:
ATP + PA + Q + PB
(1
ξI − R−1
)BTP = 0 (12)
where ξ is the attenuation level; Q = QT > 0 is a prescribed weighting matrix.
Theorem 2 Under the condition of Assumption 1, the proposed robust adaptive compensation controlscheme, which combines the adaptive fuzzy control law (9) with the robust H∞ control law (11), canguarantee the convergence of the closed loop system (5) to a residual set Φ(r) with rate μ/2, where
μ= 1
2min
{λmin(Q)
λmax(P), λ
}, r =
√σ
μand σ = 1
2γ λΘTL−1Θ + γ ε + 1
2ε‖D(q)−1‖2‖F(q, q)‖2.
Proof. To prove Theorem 2, the Lyapunov function is defined as follows:
V = 1
2xTPx + 1
2γ ΘTL−1Θ (13)
where ΘT = ΘT −ΘT. The time derivative of V along tracking error dynamic Equation (5) is given asfollows:
V = 1
2xT(ATP + PA)x − xTPBΦf + xTPBψ − xTPBΦh + xTPBδ + γ ΘTL−1 ˙
Θ (14)
where ψ = D(q)−1(ΔD(q)q +ΔH(q, q)) and δ = D(q)−1F(q, q). �
From Assumption 1, we can express the third term in Equation (14) as follows: xTPBψ �‖ψ‖‖BTPx‖ �ΘTξ(x)‖BTPx‖. Substituting the adaptive fuzzy control law Φf in Equation (9)into the second term in Equation (14) yields the following formula: −xTPBΦf = −xTPBΘTξ(x)tanh((ΘTξ(x)BTPx)/κ). Thus, we can get the following inequality of the two terms −xTPBΦf + xTPBψin Equation (14):
− xTPBΦf + xTPBψ � γ ε − γ ΘTξ(x)‖BTPx‖ (15)
where γ is an arbitrary small positive constant.
According to the term ˙Θ = −λ(Θ +Θ)+ Lξ(x)‖BTPx‖ derived from adaptive fuzzy control
Equation (10) and the fact that ΘTL−1Θ + ΘTL−1Θ � 12 (Θ
TL−1Θ −ΘTL−1Θ), the sixth term of
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

COMPUTED-TORQUE PLUS ROBUST ADAPTIVE COMPENSATION CONTROL FOR ROBOT MANIPULATOR7 of 16
γ ΘTL−1 ˙Θ in Equation (14) can be rewritten as follows:
γ ΘTL−1 ˙Θ � −1
2γ λΘTL−1Θ + 1
2γ λΘTL−1Θ + γ ΘTξ(x)‖BTPx‖ (16)
Substituting Equations (15) and (16) into Equation (14) yields the following inequality:
V � 1
2xT(ATP + PA)x + γ ε − 1
2γ λΘTL−1Θ + 1
2γ λΘTL−1Θ − xTPBΦh + xTPBδ (17)
The term of xTPBδ in Equation (17) can be defined as follows:
xTPBδ � 1
2(εδTδ + ε−1xTPBBTPx) (18)
Substituting Equation (18), robust control Equation (11) and Riccati-like Equation (12) into Equation(17), the derivative of the Lyapunov function V can be obtained as follows:
V � 1
2(−xTQx − γ λΘTL−1Θ)+ 1
2γ λΘTL−1Θ + γ ε + 1
2ε‖D(q)−1‖2‖F(q, q)‖2
� −1
2λmin(Q)‖x‖2 − 1
2γ λλmin(L
−1)
∥∥∥Θ∥∥∥2+ 1
2γ λΘTL−1Θ + γ ε + 1
2ε‖D(q)−1‖2‖F(q, q)‖2
� − min
{λmin(Q)
λmax(P), λ
}V + 1
2γ λΘTL−1Θ + γ ε + 1
2ε‖D(q)−1‖2‖F(q, q)‖2
= −μV + σ (19)
where μ= min{(λmin(Q)/λmax(P)), λ} and σ = 12γ λΘ
TL−1Θ + γ ε + 12ε‖D(q)−1‖2‖F(q, q)‖2.
Since ω1(‖x‖2 + ‖Θ‖2)� V(x)�ω2(‖x‖2 + ‖Θ‖2), in which ω1 = 12 min(λmin(P), γ λmin(L−1))
and ω2 = 12 max(λmax(P), γ λmax(L−1)), V(x) satisfies the first property in Theorem 1. Furthermore, we
can obtain the second property V � −qα[V − V ], where q = 2, α= 12μ= 1
2 min{(λmin(Q)/λmax(P)), λ}.Therefore, using Theorem 1, it can be seen that the tracking error converges to a residual set Φ(r) withthe convergence rate μ/2.
4. Simulation results and discussion
As shown in Fig. 2, a two-link planar rotary robot manipulator is utilized to verify the effectivenessof the computed-torque plus robust adaptive compensation control scheme (CTRACC). Its dynamicequation is derived as follows:[
D11(q2) D12(q2)
D21(q2) D22(q2)
] [q1
q2
]+[−C12(q2)q2 −C12(q2)(q1 + q2)
C12(q2)q1 0
] [q1
q2
]+[
G1(q1, q2)gG2(q1, q2)g
]=[τ1
τ2
](20)
where D11(q2)= (m1 + m2)r21 + m2r2
2 + 2m2r1r2 cos q2, D12(q2)= D21(q2)= m2r22 + m2r1r2 cos q2,
D22(q2)= m2r22, C12(q2)= m2r1r2 sin q2, G1(q1, q2)= (m1 + m2)r1 cos q2 + m2r2 cos(q1 + q2), G2(q1,
q2)= m2r2 cos(q1 + q2), in which qi(i = 1, 2) denote angular position (rad), mi(i = 1, 2) the masses ofthe links and ri(i = 1, 2) the length of the links.
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

8 of 16 Y. CHEN ET AL.
Fig. 2. Two-link planar rotary robot manipulator.
Then, computer simulations of the following three cases are carried out to investigate the controlperformances of the proposed compensation control law.
Case 1. The conventional computed-torque controller is applied to a robot manipulator with structuredand unstructured uncertainties. In this case, the control input torque in Equation (20) is defined asfollows:
τ = τ0 = D(q)(qd + Kve + Kpe)+ H(q, q) (21)
Case 2. The computed-torque plus an adaptive fuzzy compensation control algorithm (Chen et al.,2012) is applied to a robot manipulator with structured and unstructured uncertainties, and its controlinput torque in Equation (20) is obtained as follows:
τ = τ0 + τf = D(q)(qd + Kve + Kpe)+ H(q, q)+ D(q) ·Φf (22)
Case 3. The CTRACC in this paper is applied to a robot manipulator with structured and unstructureduncertainties. In this case, the control input torque in Equation (20) is calculated as follows:
τ = τ0 + τc = D(q)(qd + Kve + Kpe)+ H(q, q)+ D(q) · (Φf +Φh) (23)
The desired trajectory for both joints is defined as qd1 = 0.5 cos(t)+ 0.2 sin(3t) and qd2 =−0.2 sin(2t)− 0.5 cos(t). Simulation cases are conducted on a two-link robot manipulator with theactual kinematic parameters such as r1 = 0.287 m, m1 = 6.83 kg, r2 = 0.2005 m,m2 = 3.09 kg. An uncer-tain payload δ(t)= [10 sin(t), 10 cos(t)]T is attached to the second link and a viscous friction forceF(q, q)= 80 sgn(q)+ 10q is added to each joint. The CTRACC in Theorem 2 is given by the followingcomputation procedure:
Step 1. For critical damping, the control parameters in the simulation cases are picked as Kv =diag{20, 20}, Kp = diag{100, 100}.
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

COMPUTED-TORQUE PLUS ROBUST ADAPTIVE COMPENSATION CONTROL FOR ROBOT MANIPULATOR9 of 16
Step 2. Choose the desired attenuation level ξ = 0.3, the weight matrix Q = 30I4×4 and the gain matrixR−1 = 20I2×2 in the robust H∞ control model (11).
Step 3. Solve the Riccati-like equation (12) and get the robust H∞ gain matrix P = [6.9505 × eye(2),0.1482 × eye(2); 0.1482 × eye(2), 0.6049 × eye(2)].
Step 4. The input vector of the adaptive fuzzy control algorithm is designed as X = {xi | i = 1, 2, . . . , 4} ={q1, q1, q2, q2}. According to the error values of the conventional computed-torque controller causedby structured uncertainties, the universe of discourse of each fuzzy input vector is divided into fivefuzzy labels, i.e.NB, NS, ZO, PS, PB and their corresponding membership functions are defined asμAl
i(xi)= exp[−((xi − Ci)
2/2σ 2i )], where Ci are −1, −0.5, 0, 0.5 and 1, and σi is equal to 0.2124.
Furthermore, the constants λ, ε in adaptive control equation (10) are selected as λ= 0.03, ε= 10. And,the matrix L is picked as L = diag{20, 20, . . . , 20}.Step 5. Obtain the corresponding robust adaptive compensation control law.
A set of simulation results of the tracking positions and control torques for the two joints are illus-trated in Figs 3–5.
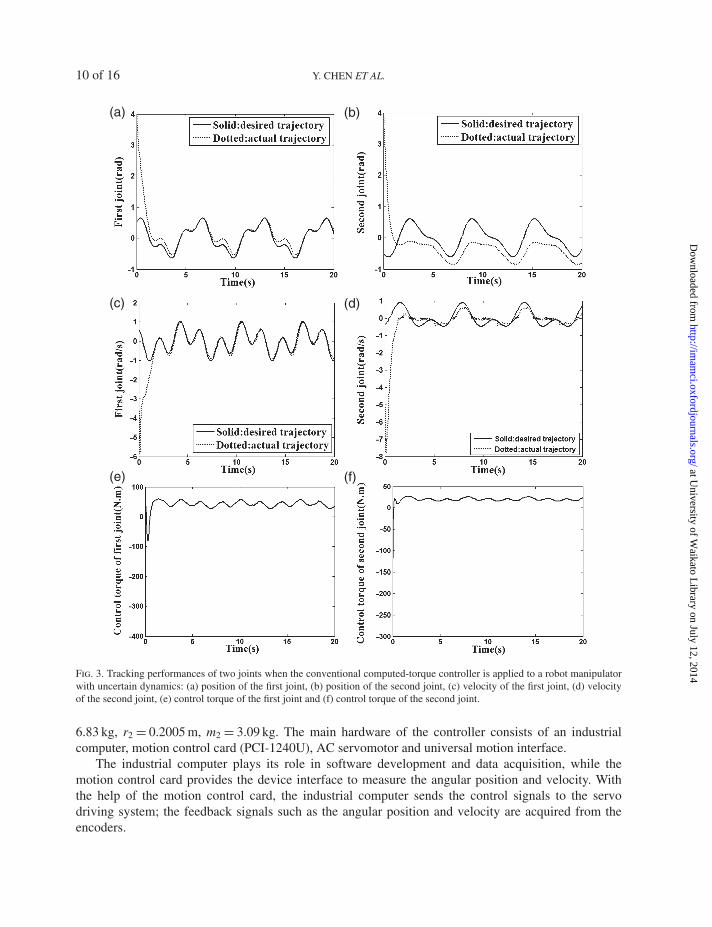
As shown in Fig. 3, a large gap between the simulation results and desired trajectories in the secondjoint, which results from the uncertain payload, may destroy the stability of the closed-loop control sys-tem. In addition, it is worth noting that the evaluation values of the control torques for two joints displayrelatively large oscillations, which might go beyond the limits of actuators. Hence, a conclusion can bedrawn that some additional compensation controllers should be appropriately designed and incorporatedin the conventional computed-torque controller for a robot manipulator with structured and unstructureduncertainties.
As shown in Fig. 4, compared with the first case, the tracking performances in the transient andsteady state are remarkably improved, and the disturbance torque may be rejected by the adaptivefuzzy compensation control law in Equation (22). The oscillations of the tracking errors in this caseare remarkably smaller than the first case, and the evaluation values of control torques for two jointsalso exhibit smooth tracking performances. Comparison results between this case and the first casedemonstrate that the adaptive fuzzy compensation control law in this case can effectively compensatefor structured uncertainties. However, it can be obviously observed from Fig. 4 that there still is a bigerror between the desired and actual trajectories. Thus, only the adaptive fuzzy compensator cannotcompletely compensate for these uncertainties with different features.
Figure 5 illustrates the tracking performances of two joints when the proposed computed-torque plusrobust adaptive compensation control law in Eq. (23) is applied to a robot manipulator with uncertaindynamics. It can be seen from Figs 4 and 5 that the proposed robust adaptive compensation controlscheme can perform much better than the pure adaptive fuzzy compensator in the second case. Theexclusive difference between the second case and this case is that a robust H∞ control model in thiscase is employed to approximate the unstructured uncertainties and approximation errors. Therefore,the proposed robust adaptive compensation control scheme can eliminate the effects of structured andunstructured uncertainties with different features on the control performances.
5. Experimental results and discussion
To validate the tracking performances of the proposed robust adaptive compensation control scheme,several experiments are conducted on a 6-DOF robot manipulator (Fig. 6). The kinematic parametersof the first and second links in the 6-DOF robot manipulator are given as follows: r1 = 0.287 m, m1 =
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from
10 of 16 Y. CHEN ET AL.
(a) (b)
(c) (d)
(e) (f)
Fig. 3. Tracking performances of two joints when the conventional computed-torque controller is applied to a robot manipulatorwith uncertain dynamics: (a) position of the first joint, (b) position of the second joint, (c) velocity of the first joint, (d) velocityof the second joint, (e) control torque of the first joint and (f) control torque of the second joint.
6.83 kg, r2 = 0.2005 m, m2 = 3.09 kg. The main hardware of the controller consists of an industrialcomputer, motion control card (PCI-1240U), AC servomotor and universal motion interface.
The industrial computer plays its role in software development and data acquisition, while themotion control card provides the device interface to measure the angular position and velocity. Withthe help of the motion control card, the industrial computer sends the control signals to the servodriving system; the feedback signals such as the angular position and velocity are acquired from theencoders.
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

COMPUTED-TORQUE PLUS ROBUST ADAPTIVE COMPENSATION CONTROL FOR ROBOT MANIPULATOR11 of 16
(a) (b)
(c) (d)
(e) (f)
Fig. 4. Tracking performances of two joints when a computed-torque controller plus adaptive fuzzy compensator is applied to arobot manipulator with uncertain dynamics: (a) position of the first joint, (b) position of the second joint, (c) velocity of the firstjoint, (d) velocity of the second joint, (e) control torque of the first joint and (f) control torque of the second joint.
Figure 7 illustrates the comparison results between the experimental data and simulation results.From the position curves in Fig. 7(a, b), it can be seen that the proposed robust adaptive compensationcontrol scheme can respond to the desired trajectory promptly and steadily; moreover, their experimentaldata are in good agreement with the simulation results. From the position error curves in Fig. 7(c, d), itcan be observed that the experimental data of the position errors are larger than their simulation results.The maximal experimental position errors of the first and second joint are 0.2392 (rad) and 0.2482 (rad),
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

12 of 16 Y. CHEN ET AL.
(a) (b)
(c) (d)
(e) (f)
Fig. 5. Tracking performances of two joints when the proposed CTRACC is applied to a robot manipulator with uncertaindynamics: (a) position of the first joint, (b) position of the second joint, (c) velocity of the first joint, (d) velocity of the secondjoint, (e) control torque of the first joint and (f) control torque of the second joint.
while the corresponding values in simulation cases are 0.0271 (rad) and 0.0562 (rad). The lack of thecoulomb friction force mode may be the main reason for the big gap of the position errors between theexperimental data and simulation results.
Some comparative studies have also been conducted between the proposed robust adaptive com-pensation control scheme and the recently published studies (see e.g. Chen et al., 2012; Jun, 2010).The desired trajectories tracked by the three control algorithms are the same as those in the simulation
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

COMPUTED-TORQUE PLUS ROBUST ADAPTIVE COMPENSATION CONTROL FOR ROBOT MANIPULATOR13 of 16
(a) (b)
Fig. 6. Experimental equipment: (a) a 6-DOF robot manipulator and (b) numeral control system of a robot manipulator.
(a) (b)
(c) (d)
Fig. 7. Comparison results between the experimental data and simulation results: (a) position of the first joint, (b) position of thesecond joint, (c) position error of the first joint and (d) position error of the second joint.
cases. For the convenience of comparison, the position and velocity tracking errors are calculated bythe following tracking error equations over one training cycle of a trajectory:
Ep = 1
N
N∑i=1
‖qdi − qi‖2 (rad)2 Ev = 1
N
N∑i=1
‖qdi − qi‖2 (rad/s)2 (24)
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

14 of 16 Y. CHEN ET AL.
Table 1 Tracking errors
Errors
First joint Second joint
Control schemes Ep (rad)2 Ev (rad/s)2 Ep (rad)2 Ev (rad/s)2
CTRACC 0.00101275 0.00050216 0.0031352 0.0012180Chen et al. (2012) 0.0028644 0.0017878 0.0065303 0.0027343Jun (2010) 0.0045734 0.0028224 0.0028294 0.0079754
where Ep is the position tracking error; Ev is the velocity tracking error; N is the number of elements ofthe position vectors; and qdi and qi are the desired and actual trajectories, respectively.
According to the calculation results of the tracking errors summarized in Table 1, it can be seenthat the proposed robust adaptive compensation control scheme clearly exhibits satisfactory trackingperformances, and it presents tracking errors smaller than those in the other two control schemes, inChen et al. (2001) and Jun (2010). Compared with the computed-torque plus adaptive fuzzy compensa-tion controller in Chen et al. (2001), the position and velocity tracking errors of the first joint under theproposed robust adaptive compensation control scheme have been reduced by 65 and 72%, respectively.
6. Conclusion
This paper deals with the trajectory tracking control of a robot manipulator with structured and unstruc-tured uncertainties. The contribution of this paper mainly lies in two aspects. First, a novel controldesign philosophy is presented to separately compensate for structured and unstructured uncertainties.Secondly, a computed-torque plus robust adaptive compensation control scheme is proposed to handlethese inevitable uncertainties. The mathematical proof of its stability and simulation results is presented.From the discussion and simulation results, the following conclusions can be reached: (1) the robustadaptive compensation control scheme is capable of trajectory tracking control of a robot manipula-tor with high accuracy; (2) the robust adaptive compensation control scheme can separately deal withstructured and unstructured uncertainties with satisfactory performance; (3) the robust adaptive com-pensation control scheme can improve the control performances of the conventional computed-torquecontroller; (4) the robust adaptive compensation control scheme can be utilized to combine some com-plex control approaches such as the fuzzy control algorithm and the H∞ control model.
The simulation and experimental results demonstrate that the robust adaptive compensation controlscheme has the following main advantages: (1) the robust adaptive compensation control scheme per-forms remarkably better than the conventional computed-torque controller in terms of the tracking errorconvergence and disturbance attenuation; (2) some experimental comparative results demonstrate thatthe proposed control scheme is the most effective and superior in improving control performances inthe challenging domain of a robot manipulator with some complex uncertainties; (3) the robust adaptivecompensation control scheme can take advantage of the less computation burden of the adaptive fuzzycontrol algorithm and the fast transient response of the H∞ control model to deal with structured andunstructured uncertainties.
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

COMPUTED-TORQUE PLUS ROBUST ADAPTIVE COMPENSATION CONTROL FOR ROBOT MANIPULATOR15 of 16
Funding
This project is supported by National Natural Science Foundation of China (Grant No. 51375264), theNational Science and Technology Support Project (Grant No. 2011BAF16B01), the China Post-doctoralScience Foundation (Grant No. 2013M530318), Research Awards Fund for Excellent Young andMiddle-aged Scientists of Shandong Province (Grant No. BS2013ZZ008) and Post-doctoral innovationfunds of Shandong Province (Grant No. 201303105).
References
Astrom, K. J. & Wittenmark, B. (1995) Adaptive Control. New York: Addison-Wesley.Chen, W. W., Mills, J. K., Chu, J. X. & Sun, D. (2001) A fuzzy compensator for uncertainty of industrial robots.
IEEE Int. Conf. Robot. Automation, 5, 2968–2973.Chen, Y., Ma, G. Y., Lin, S. X. & Gao, J. (2012) Adaptive fuzzy computed-torque control for robot manipulator
with uncertain dynamics. Int. J. Adv. Robot. Syst., 9, 201–209.Conway, R. & Horowitz, R. (2010) Guaranteed cost control for linear periodically time-varying systems with
structured uncertainty and a generalized H2 objective. Mechatronics, 20, 12–19.Corless, M. & Leitmann, G. (1996) Exponential Convergence for Uncertain Systems with Componentwise
Bonded Controllers. New York: Springer.Dou, H. B. & Wang, S. P. (2013) Robust adaptive motion/force control for motion synchronization of multiple
uncertain two-link manipulators. Mech. Mach. Theory, 67, 77–93.Ge, H., Jing, Z. L. & Gao, J. (2012) Neural network H-infinity robust adaptive control for autonomous underwater
vehicle in 3-dimensional path following. Control Theory Appl., 29, 317–322.Hoseini, S. M., Farrokhi, M., Koshkouei, A. J. (2011) Robust adaptive control of nonlinear non-minimum phase
systems with uncertainties. Automatica, 47, 348–357.Han, S. I & Lee, J. M. (2012) Adaptive dynamic surface control with sliding mode control and RWNN for robust
positioning of a linear motion stage. Mechatronics, 22, 222–238.Jun, Y. (2010) Robust H∞ control of uncertain fuzzy systems under time-varying sampling. Fuzzy Sets Syst., 161,
859–871.Li, L. & Sun, F. C. (2009) An adaptive tracking controller design for non-linear singularly perturbed systems using
fuzzy singularly perturbed model. IMA J. Math. Control Inform., 26, 395–415.Man, Z. H., Yu, X. H., Eshraghian, K. & Palaniswami, M. (1995) A robust adaptive sliding mode track-
ing control using an RBF neural network for robotic manipulators.IEEE Int. Conf. Neural Netw., 2,2403–2408.
Mohan, S. & Bhanot, S. (2007) Comparative study of some new hybrid fuzzy algorithms for manipulator control.J. Control Sci. Eng., 2007, 1–10.
Müller, A. & Hufnagel, T. (2012) Model-based control of redundantly actuated parallel manipulators in redun-dant coordinates. Robot. Autonomous Syst., 60, 563–571.
Rahideh, A., Bajodah, A. H. & Shaheed, M. H. (2012) Real time adaptive nonlinear model inver-sion control of a twin rotor MIMO system using neural networks. Eng. Appl. Artif. Intell., 25, 1289–1297.
Shen, G., Zhu, Z. C., Zhang, L., Tang, Y., Yang, C. F., Zhao, J. S., Liu, G. D. & Han, J. W. (2013) Adaptive feed-forward compensation for hybrid control with acceleration time waveform replication on electro-hydraulicshaking. Control Eng. Practice, 21, 1128–1142.
Song, Z. S., Yi, J. Q., Zhao, D. B. & Li, X. C. (2005) A computed torque controller for uncertain robotic manipu-lator systems. Fuzzy Approach Fuzzy Sets Syst., 154, 208–226.
Wang, L. X. (1997) A Course in Fuzzy Systems and Control. Prentice-Hall: Englewood Cliffs.Wun, J. J., Liu, K. & Han, D. P. (2013) Adaptive sliding mode control for six-DOF relative motion of spacecraft
with input constraint. Acta Astronaut., 87, 64–76.
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from

16 of 16 Y. CHEN ET AL.
Yao, J. Y., Jiao, Z. X., Yao, B., Shang, Y. X. & Dong, W. B. (2012) Nonlinear adaptive robust force control ofhydraulic load simulator. Chin. J. Aeronaut., 25, 766–775.
Yang, C. F., Zheng, S. T., Lan, X. J. & Han, J. W. (2011) Adaptive robust control for spatial hydraulic parallelindustrial robot. Proc. Eng., 15, 331–335.
Zhao, Q. C. & Ji, W. (2012) Adaptive fuzzy control for a class of nonlinear systems. IMA J. Math. Control Inform.,29, 573–592.
at University of W
aikato Library on July 12, 2014
http://imam
ci.oxfordjournals.org/D
ownloaded from