computer-integrated surgery
TRANSCRIPT

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Computer-Integrated Surgery
Russell H. TaylorDept. of Computer Science/Radiology/Mechanical EngineeringDirector, Center for Computer-Integrated Surgical Systems and TechnologyThe Johns Hopkins University3400 N. Charles Street; Baltimore, Md. [email protected]
NSF Engineering Research Center for Computer-Integrated Surgical
Systems and Technology

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Thanks to many people …
• J. Anderson• W. Bargar• A. Bzostek• B. Eldridge• G. Fichtinger• J. Funda• F. Frassica• R. Goldberg• S. Gomory• G. Hager• L. Joskowicz• Y. Kim• R. Kumar• D. Shen• C. Riviere• D. Yousem• A. Kalvin• C. Cutting• A. Morris
• J. Lazarus• D. Long• K. Masamune• K. Murphy• D. Yousem• B. Jaramaz• A. DiGioia• A. Lahmer• M. Borner• A. Bauer• A. Barnes• P. Jensen• J. Yao• B. Mittelstadt• M. Li• D. Sheng• D. Rothbaum• A. Gueziec• M. Talamini
• K. Chinzei• N. Hata• R. Kikinis• D. Stoianovici• A. Patriciu• L. Whitcomb• A. Okamura• C. Davatzikos• E. Atalar• E. Zerhouni• L. Kavoussi• P. Kazanzides• H. Paul• J. Wenz• E. DeJuan• J. Roy
… and many more
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Prediction
The impact of computer-integrated surgical systems and technology on medical care in the next 20 years will be as great as the impact of computer-integrated manufacturing systems and technology on industrial production over the past 20 years.
Engineering Research Center for Computer Integrated Surgical Systems and Technology

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Imagers and other sensors
Robotic devices
Human-machine interfaces
Interface technology
Computers and networks
Image & sensor processing, anatomical modeling, surgical
planning and control, …
Patient data bases
Anatomic atlases and
surgical task models
patient surgeon
Images & other sensor data
Command & control
Decision support &
commands

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Computer-assisted planning
Patient-specific Model
Update Model
Computer-Assisted
Execution
Update Plan
Computer-Assisted
Assessment
Preoperative Intraoperative
Atlas
Postoperative
Patient

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Computer-assisted planning
Patient-specific Model
Update Model
Computer-Assisted
Execution
Update Plan
Computer-Assisted
Assessment
Preoperative Intraoperative
Atlas
PostoperativePatient
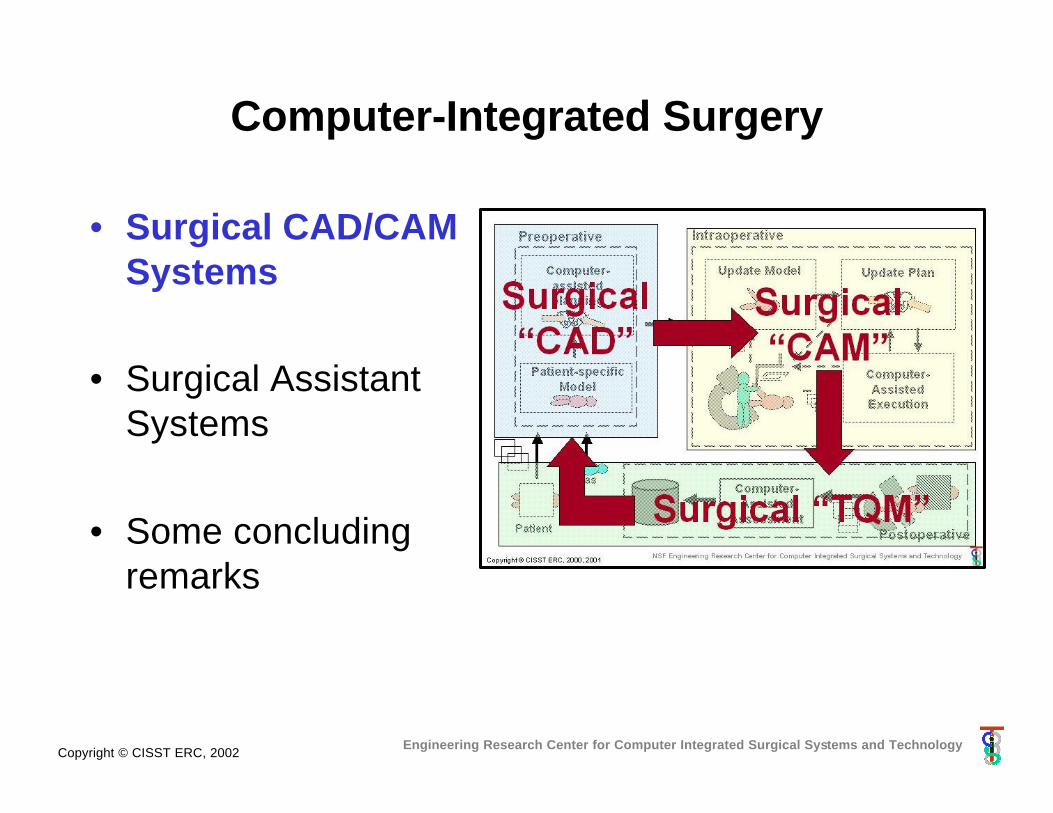
Surgical “CAD”
Surgical “TQM”
Surgical “CAM”
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
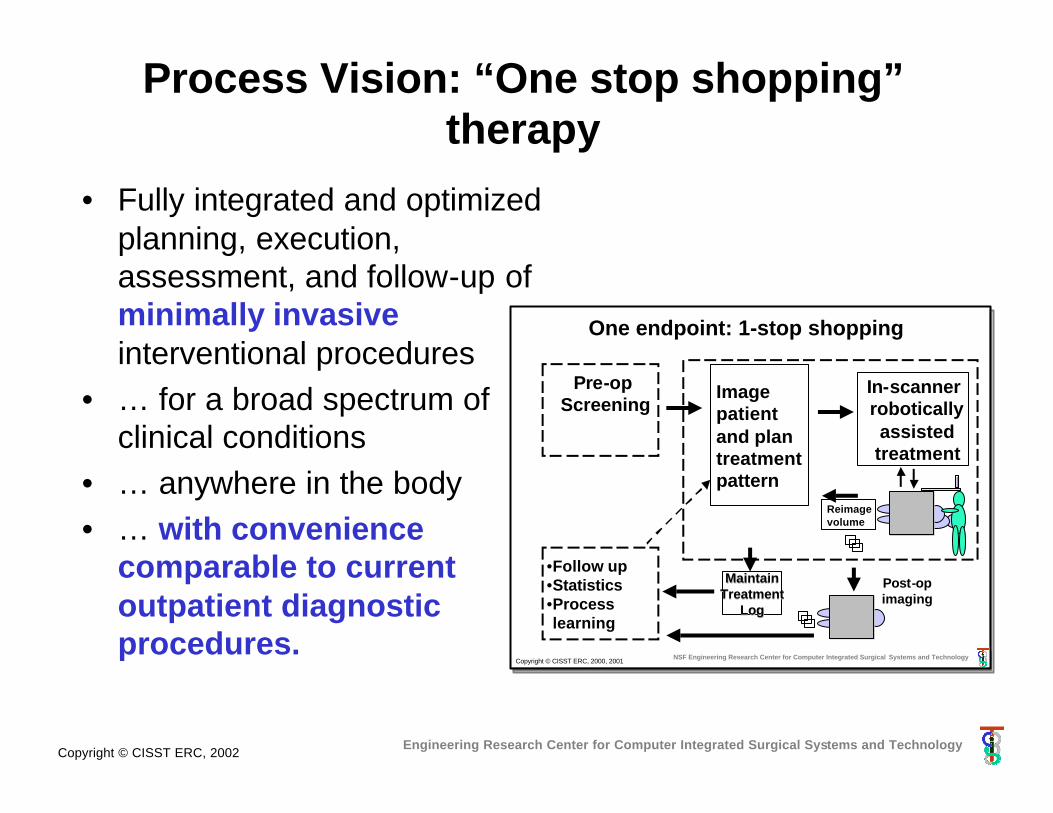
Process Vision: “One stop shopping” therapy
• Fully integrated and optimized planning, execution, assessment, and follow-up of minimally invasiveinterventional procedures
• … for a broad spectrum of clinical conditions
• … anywhere in the body• … with convenience
comparable to current outpatient diagnostic procedures.
Copyright © CISST ERC, 2000, 2001 NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
•Follow up•Statistics•Process learning
Pre-op Screening
Image patient and plan treatment pattern
In-scanner robotically assisted treatment
Post-op imaging
Reimagevolume
MaintainMaintainTreatmentTreatment
LogLog
One endpoint: 1-stop shopping
Copyright © CISST ERC, 2000, 2001 NSF Engineering Research Center for Computer Integrated Surgical Systems and Technology
•Follow up•Statistics•Process learning
Pre-op Screening
Image patient and plan treatment pattern
In-scanner robotically assisted treatment
Post-op imaging
Reimagevolume
MaintainMaintainTreatmentTreatment
LogLog
One endpoint: 1-stop shopping
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
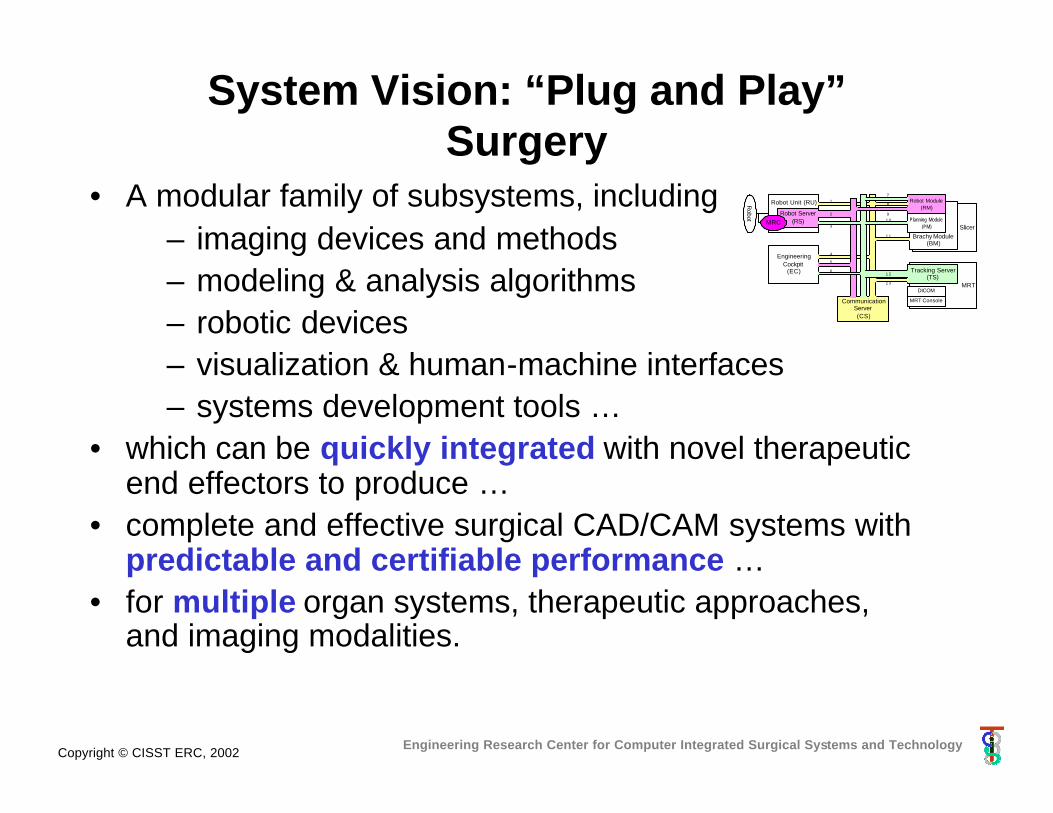
System Vision: “Plug and Play” Surgery
• A modular family of subsystems, including – imaging devices and methods– modeling & analysis algorithms – robotic devices– visualization & human-machine interfaces– systems development tools …
• which can be quickly integrated with novel therapeutic end effectors to produce …
• complete and effective surgical CAD/CAM systems with predictable and certifiable performance …
• for multiple organ systems, therapeutic approaches, and imaging modalities.
Robot Unit (RU)
EngineeringCockpit
(EC)
Robot Server(RS)
CommunicationServer(CS)
SlicerBrachy Module
(BM)
MRT
Robot Module(RM)
Planning Module(PM)
Robot
DICOM
MRT Console
Tracking Server(TS)
MRC
1
2
3
4
5
6
7
8
91 0
1 1
1 2
1 3

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Computer-assisted planning
Patient-specific Model
Update Model
Computer-Assisted
Execution
Update Plan
Computer-Assisted
Assessment
Preoperative Intraoperative
Atlas
Postoperative
Patient
Surgical
Assistants

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Vision: “Information-intensive” surgery
• Surgical systems interfacing to an information-rich surgical environment
• … and capable of using this information to maintain patient-specific models
• … registered in real time to the physical reality of the operating room
• … with the ability to use these models to assist surgeons in carrying out complex surgical procedures
• … through robotic assists and information display devices.
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Vision: “super-human” surgical teams
• Surgical systems capable of modeling and following the progress of a surgical procedure,
• … and able to use robotic devices and sensors extending human performance
• … cooperatively with the surgeon• … in order to improve the quality of
surgical procedures and to enable interventions that would be otherwise impossible.

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
• Multi-institution, multi-disciplinary center– Johns Hopkins University + Medical Institutions– MIT + Brigham & Women’s Hospital– CMU + West Penn. Allegheny Health System– Others: Morgan State, Georgetown, Harvard
• University researchers, clinicians, industry• Research, Systems, Education, Outreach
NSF Engineering Research Center for Computer-Integrated Surgical
Systems and Technology
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Technical barriers: Knowledge and Systems
Researchand Technology
Systems Infra-structure
Credit: K. Chinzei & N. Hata

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Non-technical barriersNon-Technical Barriers:The Three Cultures
The three cultures
Academic Researchers
Clinicians
Industry

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Education
Non-Technical Barriers:Education
Undergrad & postgradContinuing professional
K-12
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Researc
h
and
Tech
nolog
y
System
s
Infras
tructu
re
The three
cultu
res
Education
The CISST ERC addresses these barriers
• Multidisciplinary systems –oriented research leveraging our environment
• Engineering faculty + clinicians + industry
• Education integrated into all aspects
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Researc
han
d
Tech
nolog
y
System
s
Infrastr
ucture
The three
cultu
res
Education
The CISST ERC addresses these barriers
• Multidisciplinary systems –oriented research leveraging our environment
• Engineering faculty + clinicians + industry
• Education integrated into all aspects
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Researc
han
d
Tech
nolog
y
System
s
Infrastr
ucture
The three
cultu
res
Education
The CISST ERC addresses these barriers
• Multidisciplinary systems –oriented research leveraging our environment
• Engineering faculty + clinicians + industry
• Education integrated into all aspects
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
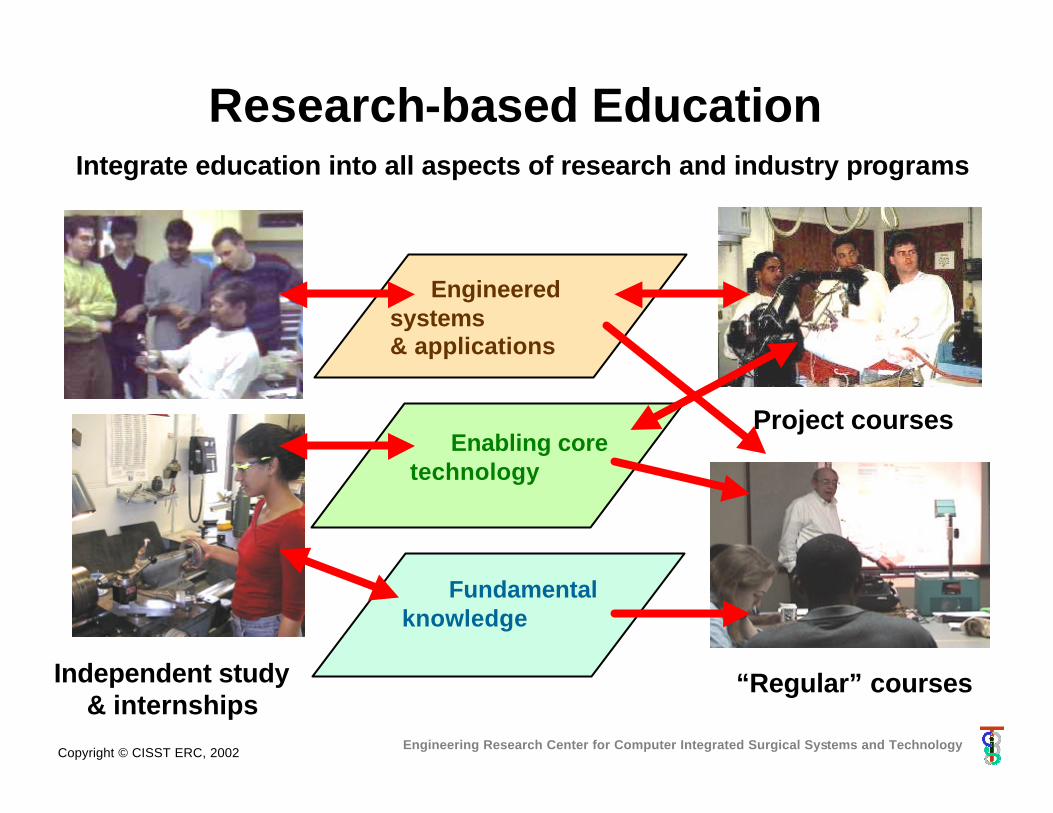
Engineered systems & applications
Enabling core technology
Fundamental knowledge
Research-based Education
“Regular” courses
Integrate education into all aspects of research and industry programs
Project courses
Independent study & internships
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
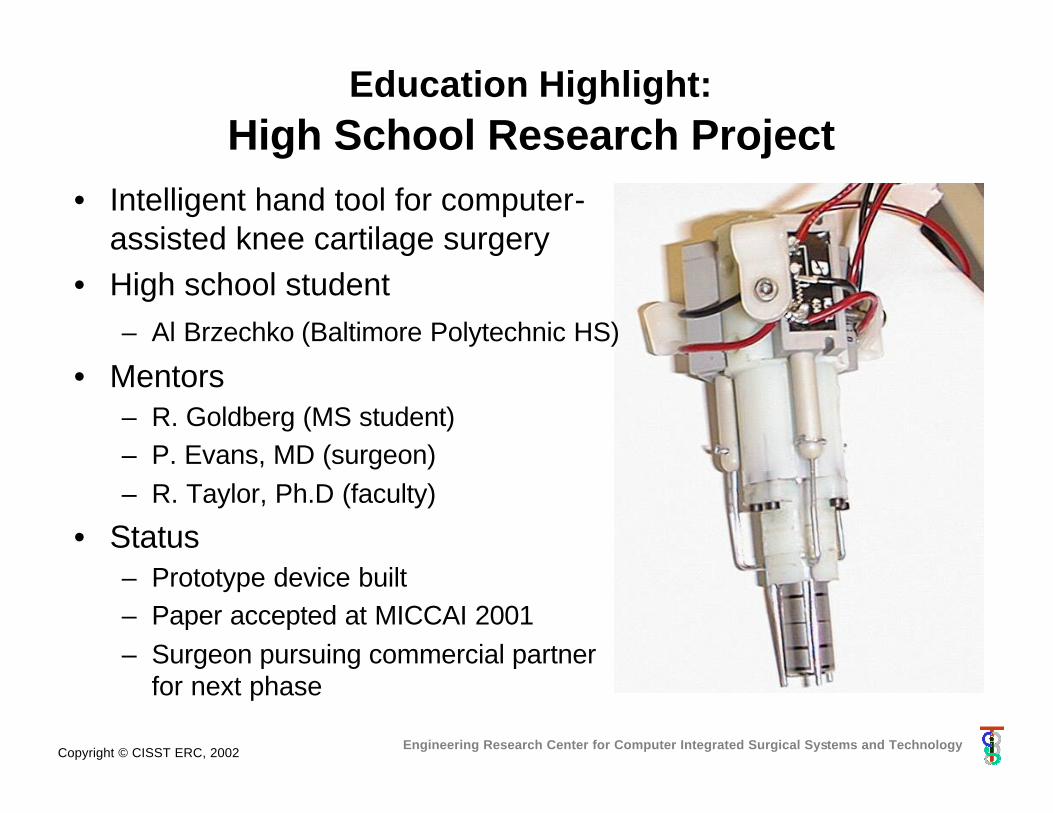
Education Highlight:High School Research Project
• Intelligent hand tool for computer-assisted knee cartilage surgery
• High school student– Al Brzechko (Baltimore Polytechnic HS)
• Mentors– R. Goldberg (MS student)– P. Evans, MD (surgeon)– R. Taylor, Ph.D (faculty)
• Status– Prototype device built– Paper accepted at MICCAI 2001– Surgeon pursuing commercial partner
for next phase

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Surgical Robot Lego Competition for High School Students
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
• Surgical CAD/CAM Systems
• Surgical Assistant Systems
• Some concluding remarks
Computer-Integrated Surgery
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
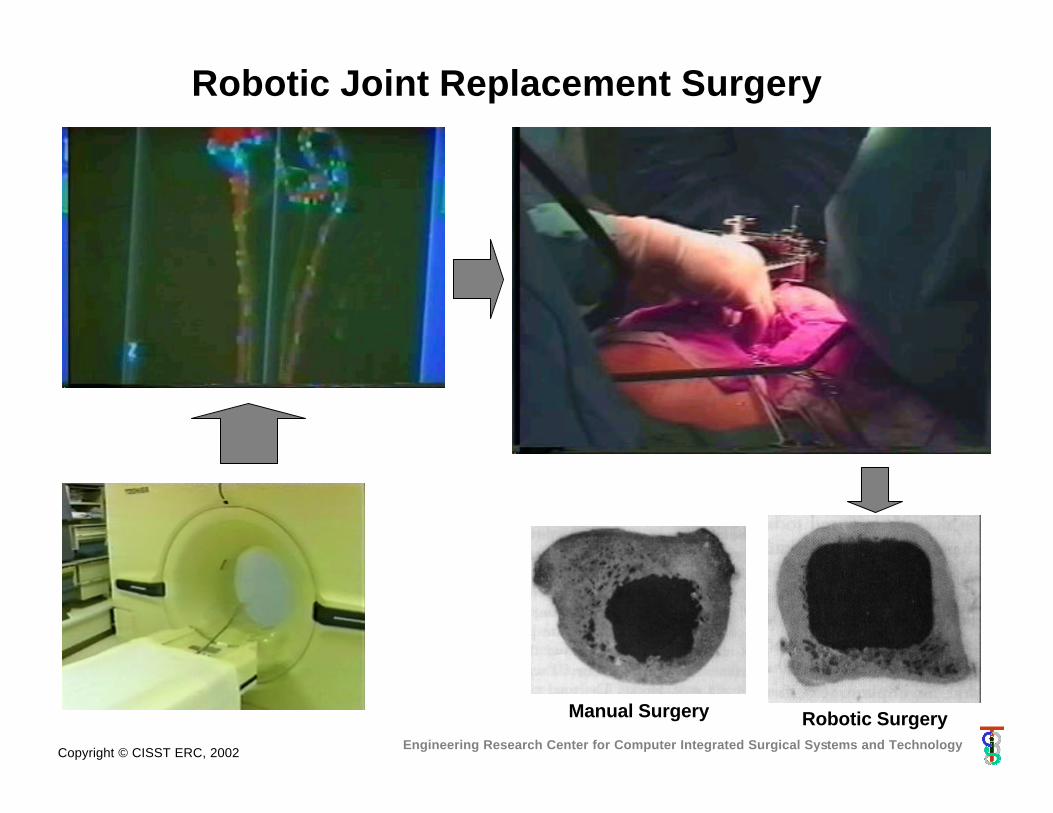
Manual Surgery Robotic Surgery
Robotic Joint Replacement Surgery

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Statistical Atlas
“Virtual CT”
Deformable 2D-3D
Planning Updated Plans
Registered Model
Visualization & Guidance
X-raysX-rays
Rigid 2D-3D
R. Taylor & J. Yao

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Prior Information#
Pro
ject
ion
s
Registration
Reconstruction
?
3D models from incomplete data
100 degrees100 degrees

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
2D/3D Deformable Registration
Jianhua Yao

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Optimized Local Therapy• Deliver optimized patterns of local
treatments (e.g., radiation seeds, injections) with an image-guided robot
• Applications
– Prostate, brain, spine, liver, bone, kidney ….
• Advantages
– Accuracy of dose– Cost and time of procedure– Lower morbidity– Avoid complications– Enable new treatments
Photo: D. Stoianovici, L. Kavoussi

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Current ERC percutaneous focus applications
Spine$120 billion cost70% in lifetime
Bone Cancer600,000 metastatic
cases/year
LiverMets from colorectal130,000 new /year60,000 death /year
Prostate~210,000 new/year25% men in lifetime
~30-40% prostatectomy~20% radiation seeds
~30-40% extracapsular

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
•Follow up•Statistics•Process learning
Pre-op Screening
Image patient and plan treatment pattern
In-scanner robotically assisted treatment
Post-op imaging
Reimagevolume
MaintainMaintainTreatmentTreatment
LogLog
One endpoint: 1-stop shopping
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Engineering Research Center for Computer Integrated Surgical Systems and Technology
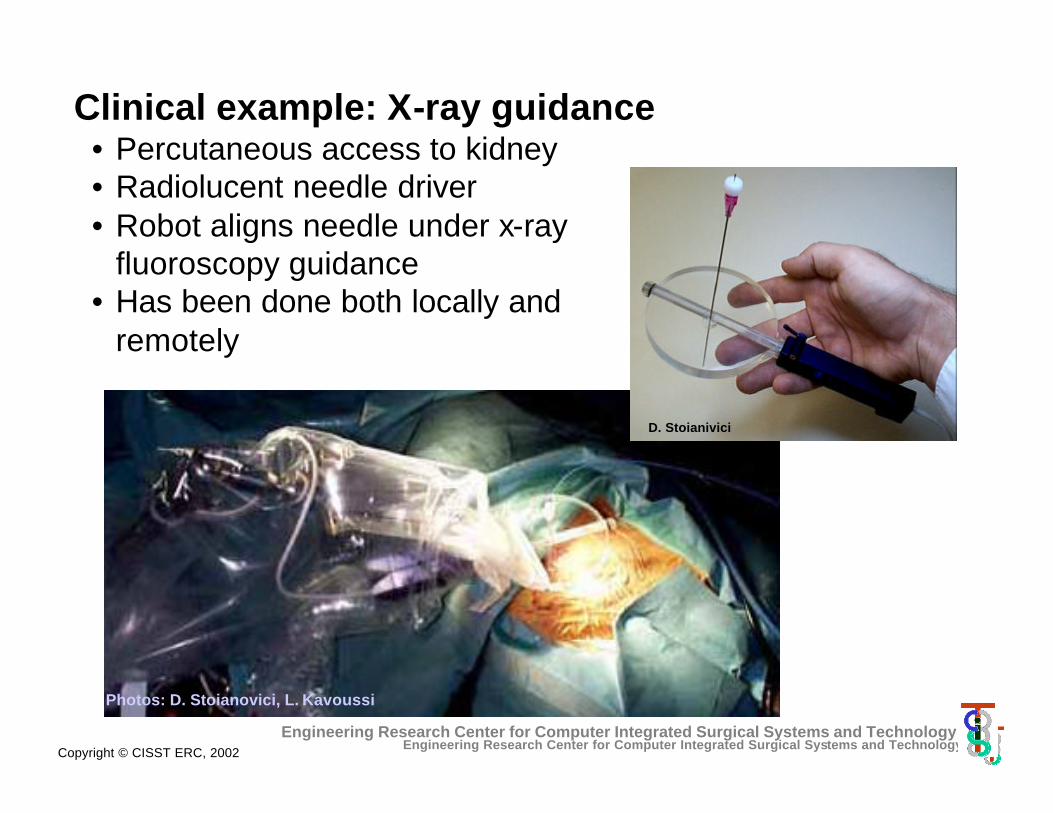
Clinical example: X-ray guidance• Percutaneous access to kidney• Radiolucent needle driver• Robot aligns needle under x-ray
fluoroscopy guidance• Has been done both locally and
remotely
Photos: D. Stoianovici, L. Kavoussi
D. Stoianivici
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
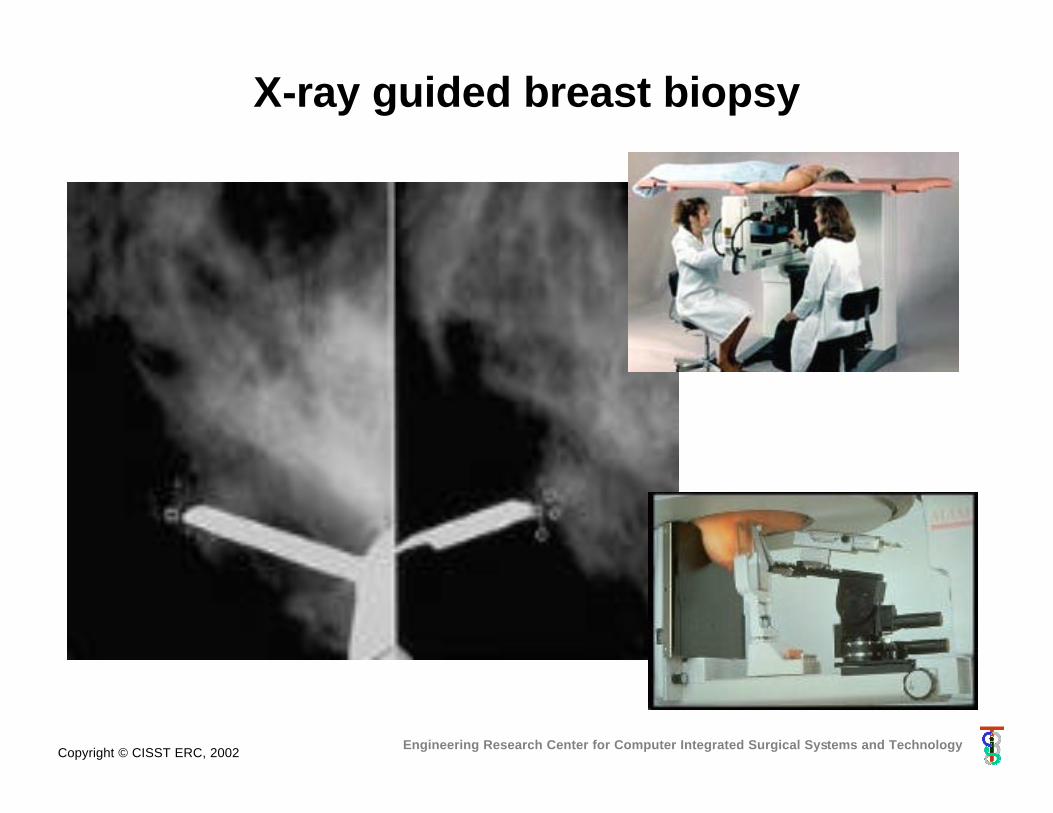
X-ray guided breast biopsy

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Clinical example• Kidney biopsy• Robot registered to CT
from single image using markers on end-effector
Photos: D. Stoianovici, L. Kavoussi, A. Patriciu , S. Solomon (JHU Bayview)
Other contributors: R. Susil, G. Fichtinger, K. Masamune, R. Taylor (JHU WSE)
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
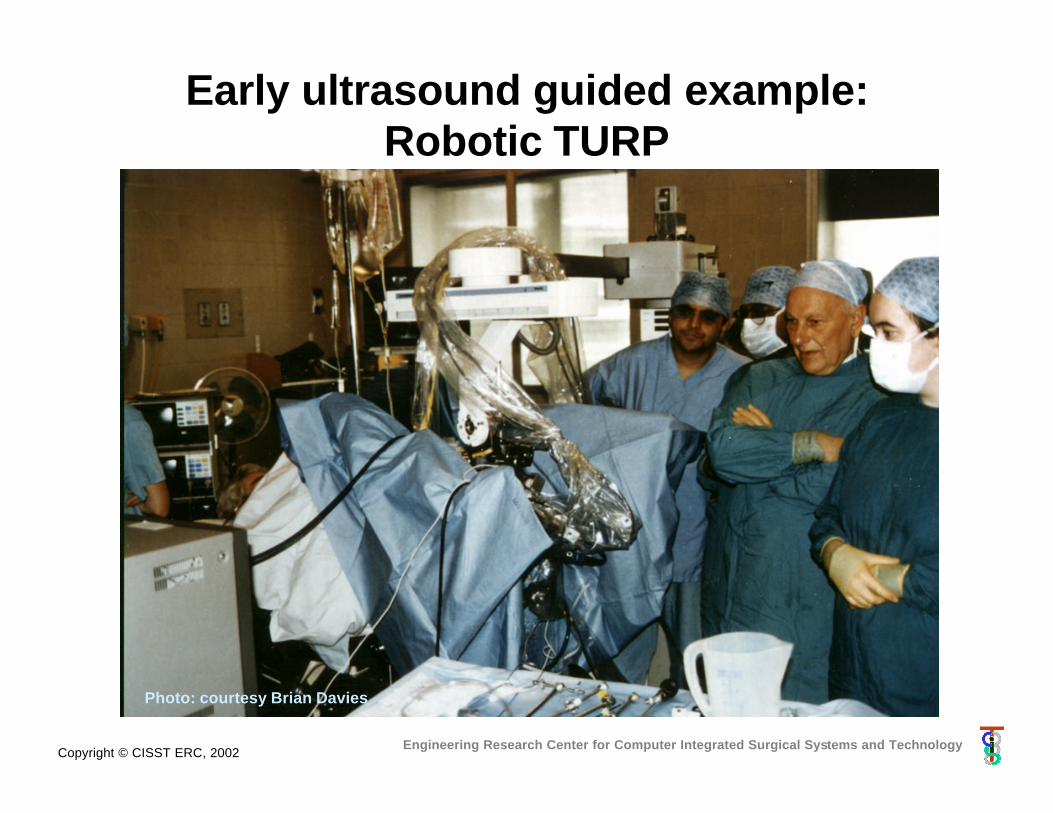
Early ultrasound guided example: Robotic TURP
Photo: courtesy Brian Davies
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
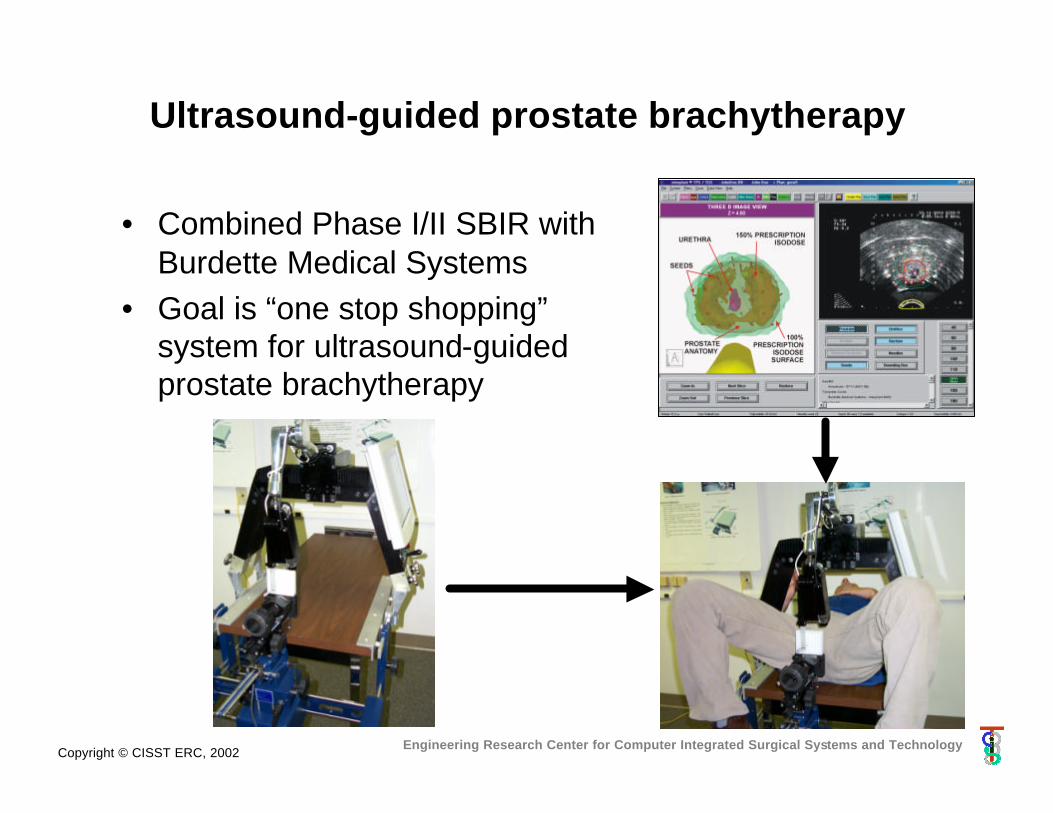
• Combined Phase I/II SBIR with Burdette Medical Systems
• Goal is “one stop shopping” system for ultrasound-guided prostate brachytherapy
Ultrasound-guided prostate brachytherapy
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
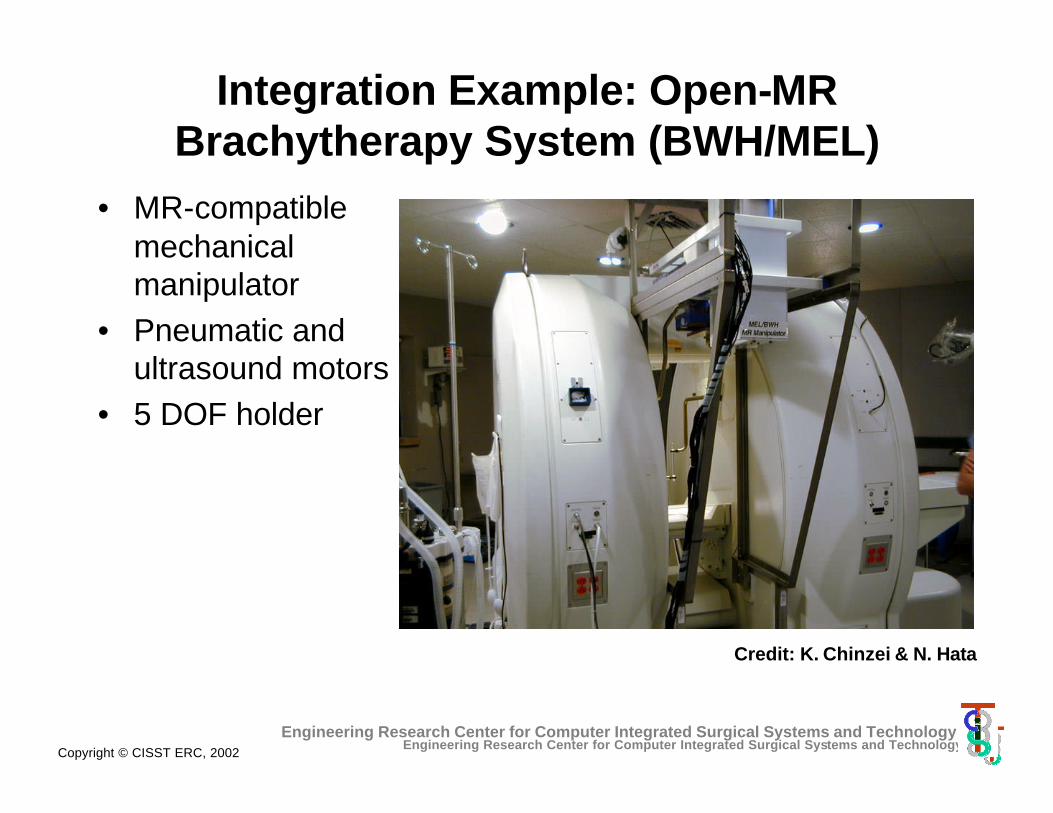
Integration Example: Open-MR Brachytherapy System (BWH/MEL)
• MR-compatible mechanical manipulator
• Pneumatic and ultrasound motors
• 5 DOF holder
Engineering Research Center for Computer Integrated Surgical Systems and Technology
Credit: K. Chinzei & N. Hata

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and TechnologyTempany et al.
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
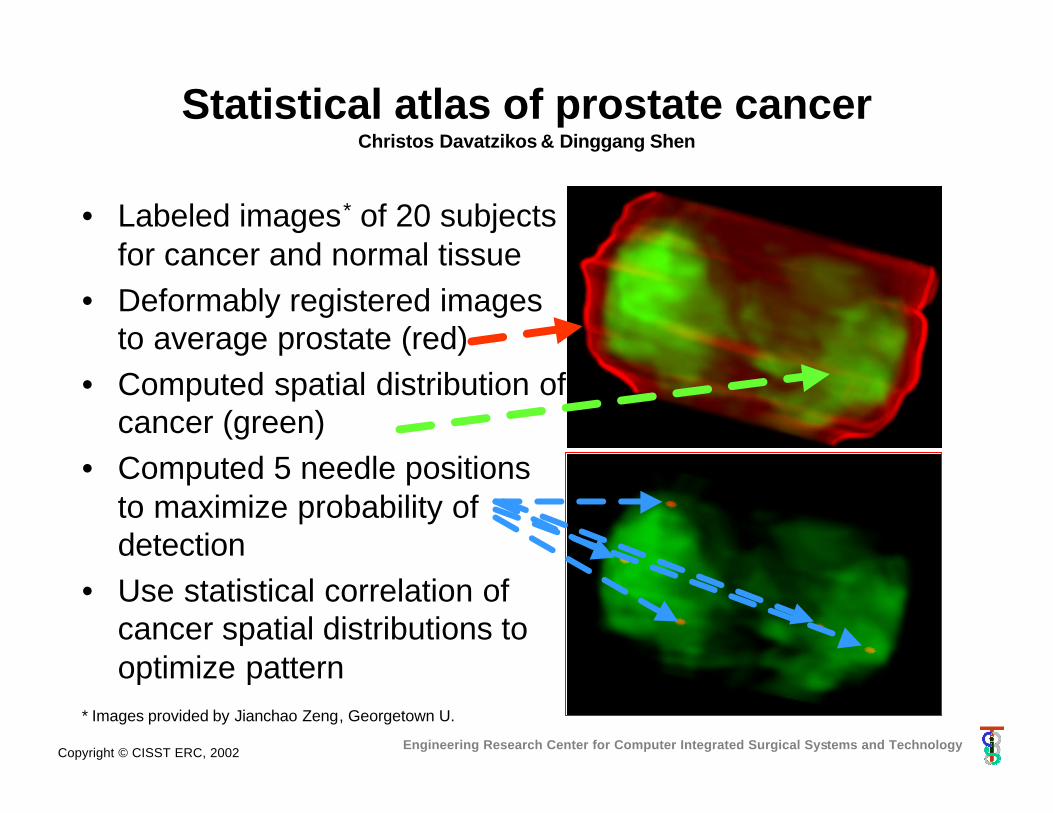
• Labeled images* of 20 subjects for cancer and normal tissue
• Deformably registered images to average prostate (red)
• Computed spatial distribution of cancer (green)
• Computed 5 needle positions to maximize probability of detection
• Use statistical correlation of cancer spatial distributions to optimize pattern
Statistical atlas of prostate cancerChristos Davatzikos & Dinggang Shen
* Images provided by Jianchao Zeng, Georgetown U.
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
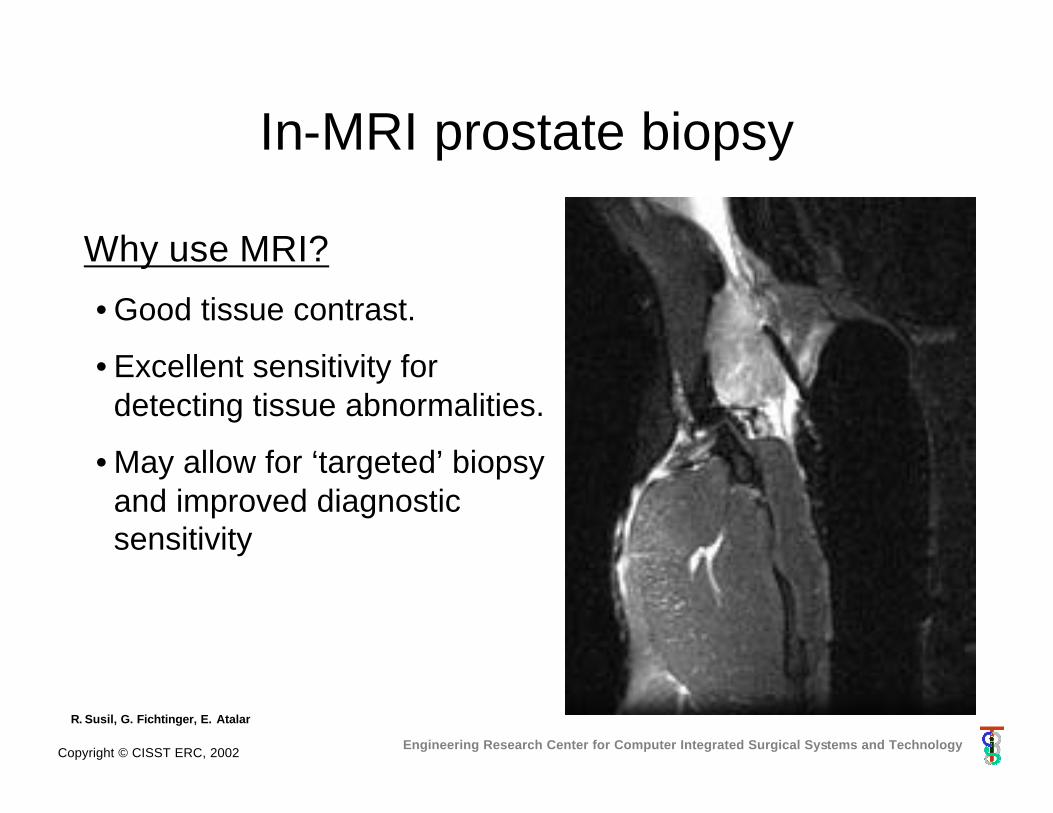
In-MRI prostate biopsy
Why use MRI?• Good tissue contrast.
• Excellent sensitivity for detecting tissue abnormalities.
• May allow for ‘targeted’ biopsy and improved diagnostic sensitivity
R. Susil, G. Fichtinger, E. Atalar

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
In-MRI imaging
Prostate
Needle
RectalProbe
R. Susil, G. Fichtinger, E. Atalar

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Interventional Device
Mimics design and functionality of US transrectal biopsy device, but allows for control while patient is in MRI scanner
R. Susil, G. Fichtinger, E. Atalar
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
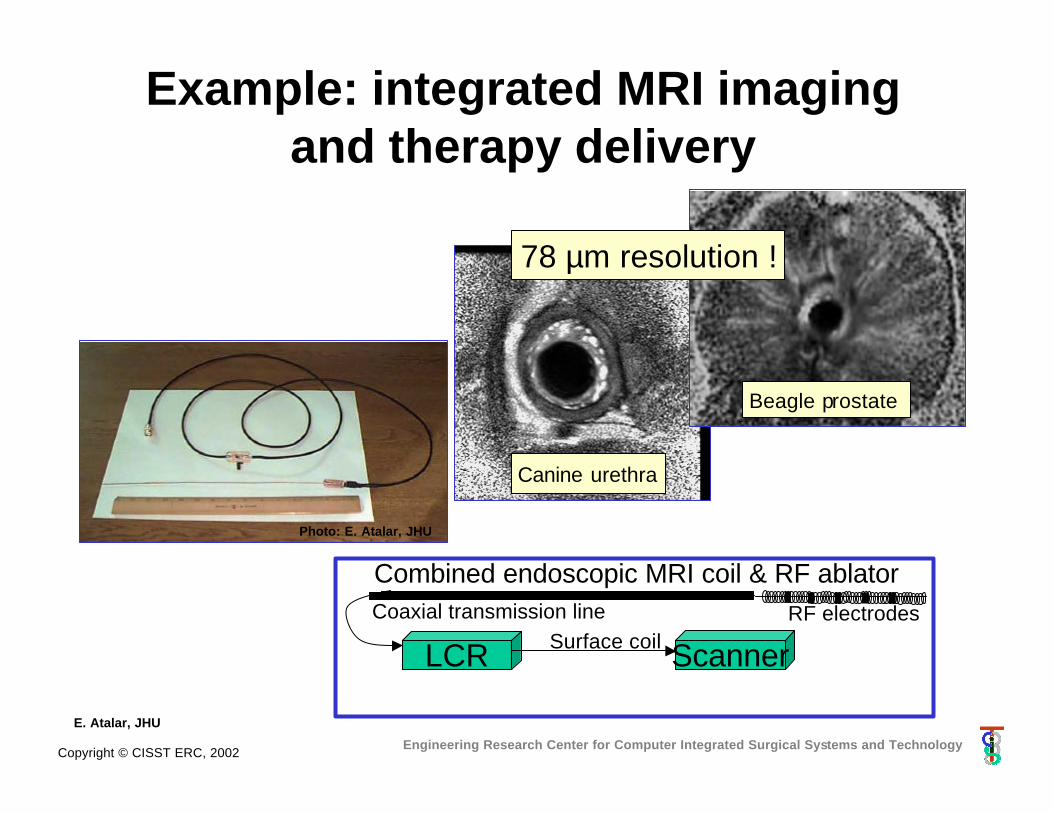
Example: integrated MRI imaging and therapy delivery
Coaxial transmission line
LCR ScannerSurface coilRF electrodes
Combined endoscopic MRI coil & RF ablator
78 µm resolution !
Canine urethra
Beagle prostate
Photo: E. Atalar, JHU
E. Atalar, JHU
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
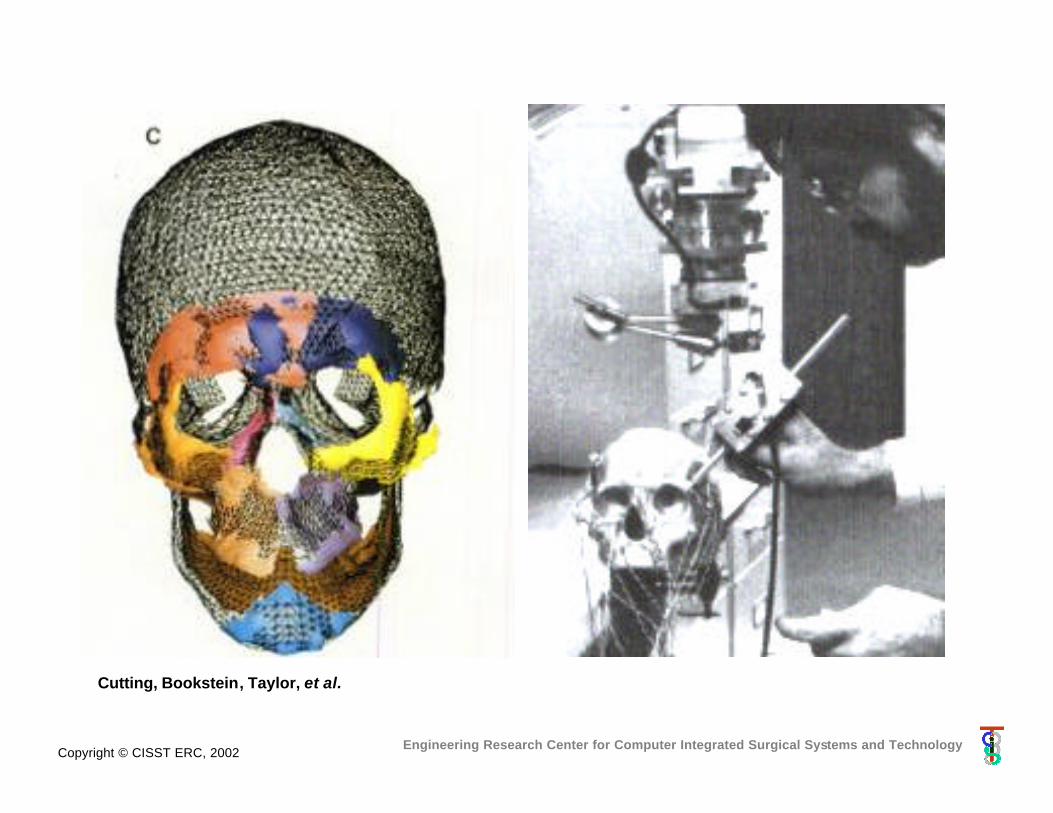
Cutting, Bookstein, Taylor, et al.
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
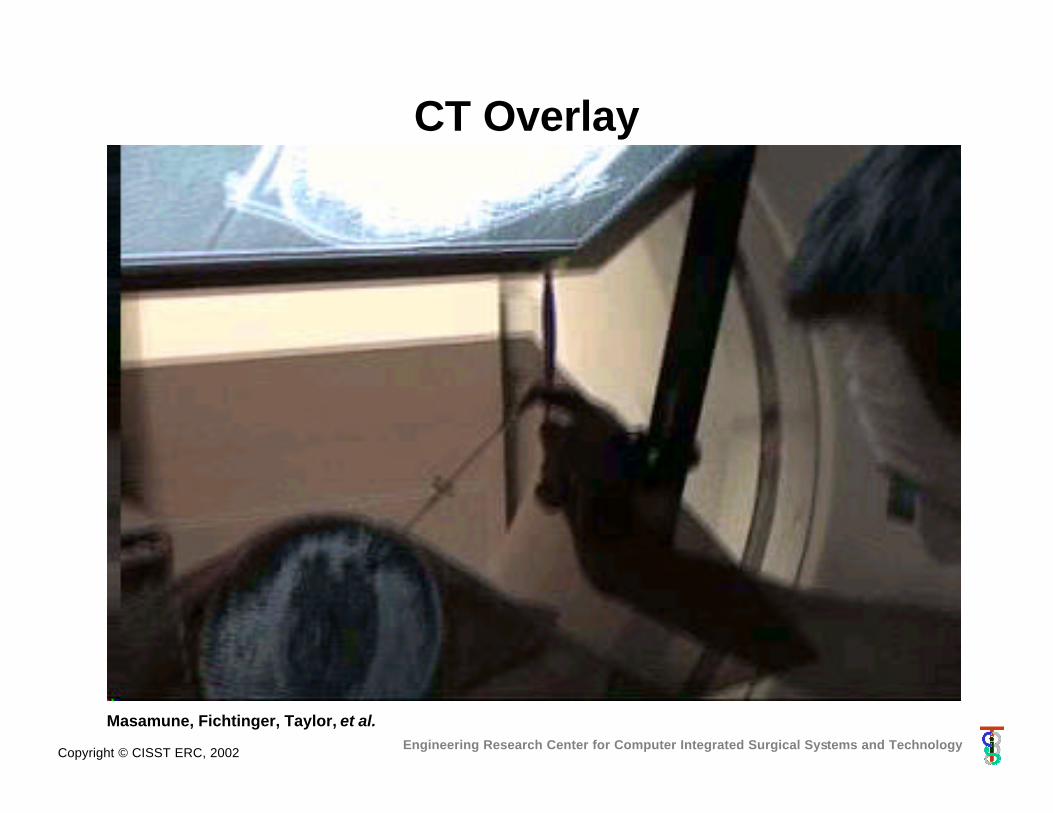
CT Overlay
Masamune, Fichtinger, Taylor, et al.

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
• Surgical CAD/CAM Systems
• Surgical Assistant Systems
• Some concluding remarks
Computer-Integrated Surgery

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
• Robot holds endoscope• Surgeon controls view
through various interfaces– Joystick or foot pedal– Voice recognition– Head or eye tracking
• Main current justifications– Labor cost saving– Somewhat steadier view
Example: Robotic endoscope Holders
Photo: Computer Motion, Inc
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
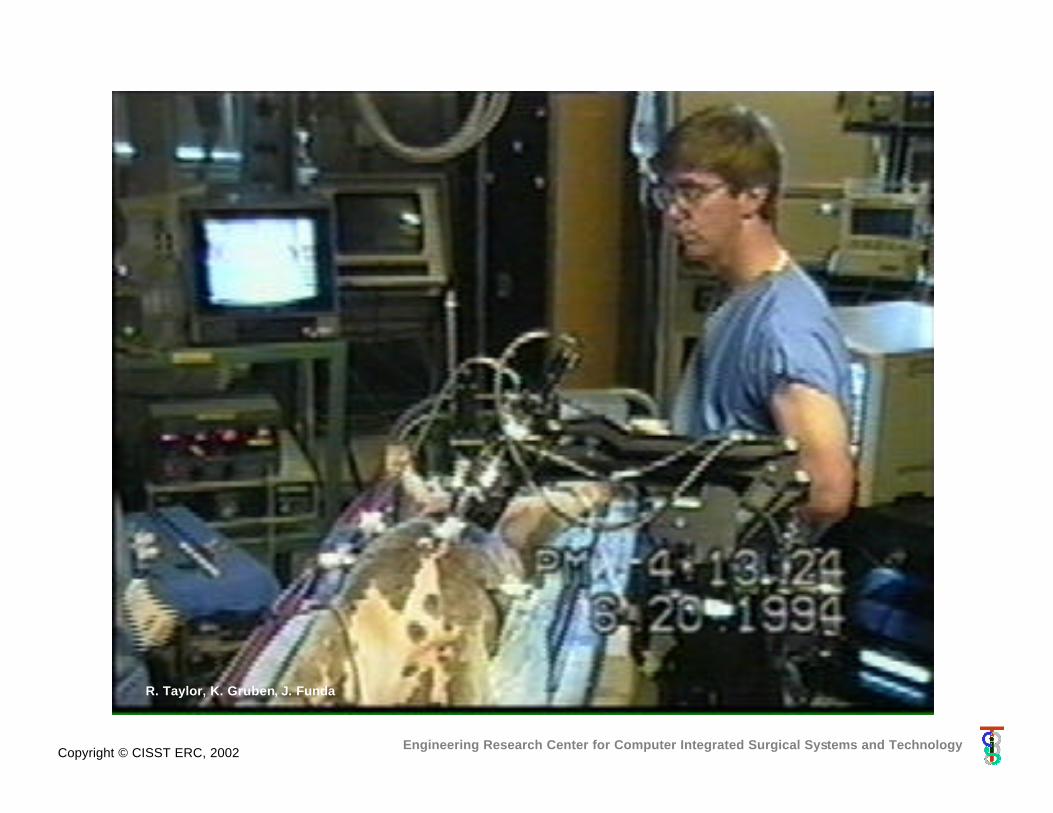
R. Taylor, K. Gruben, J. Funda

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Example: Robotic retraction assistant

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Our current focus: mostly Eye & ENT
Eye:– Retinal vein cannulation– Retinal translocation– …
ENT:– Stapes prosthesis– Cochlear implant– …
MicrovascularNeurosurgery….
Retina with occluded retinal vein
2 mm

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Handle force
Kv
Steady Hand Guiding for Microsurgery
R. TaylorFree hand motion Steady hand motion

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Successful cannulation of anapprox. 100 micron blood vessel
(Kumar, 2001)

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Ultrasound Manipulation Robots
Salcludean ultrasound system Hippocrate Robot
E.Degoulange, et al
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
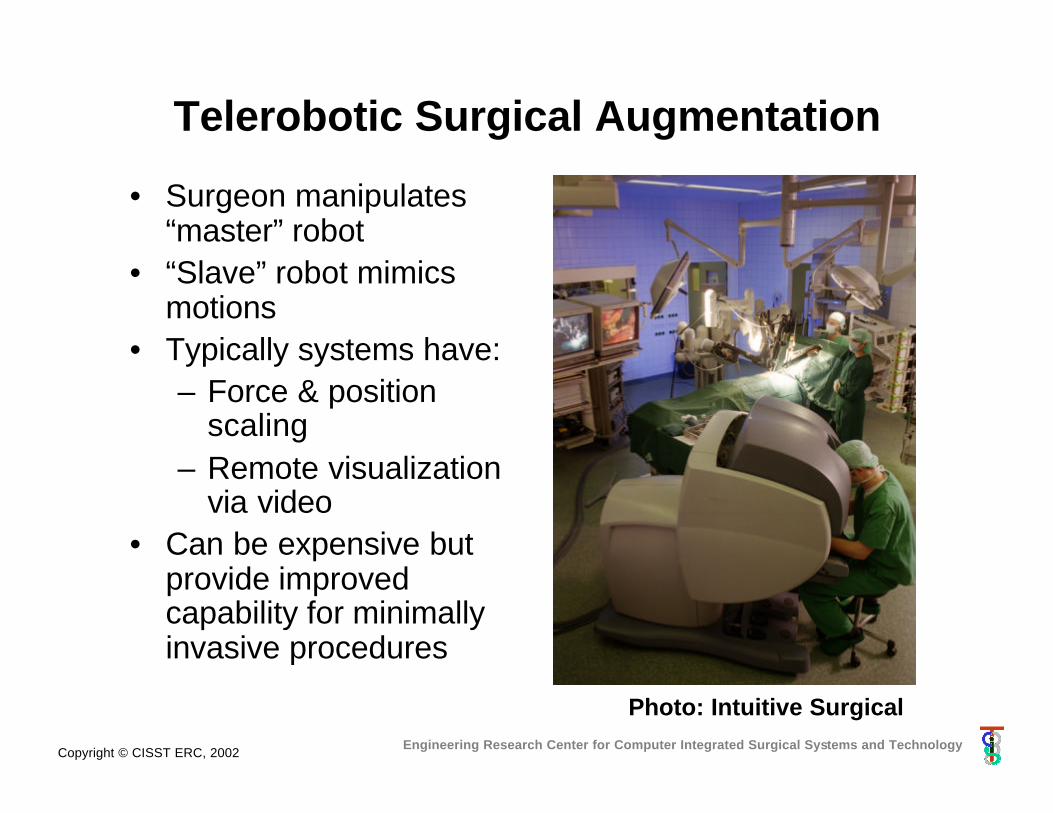
Telerobotic Surgical Augmentation
• Surgeon manipulates “master” robot
• “Slave” robot mimics motions
• Typically systems have:– Force & position
scaling– Remote visualization
via video• Can be expensive but
provide improved capability for minimally invasive procedures
Photo: Intuitive Surgical
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
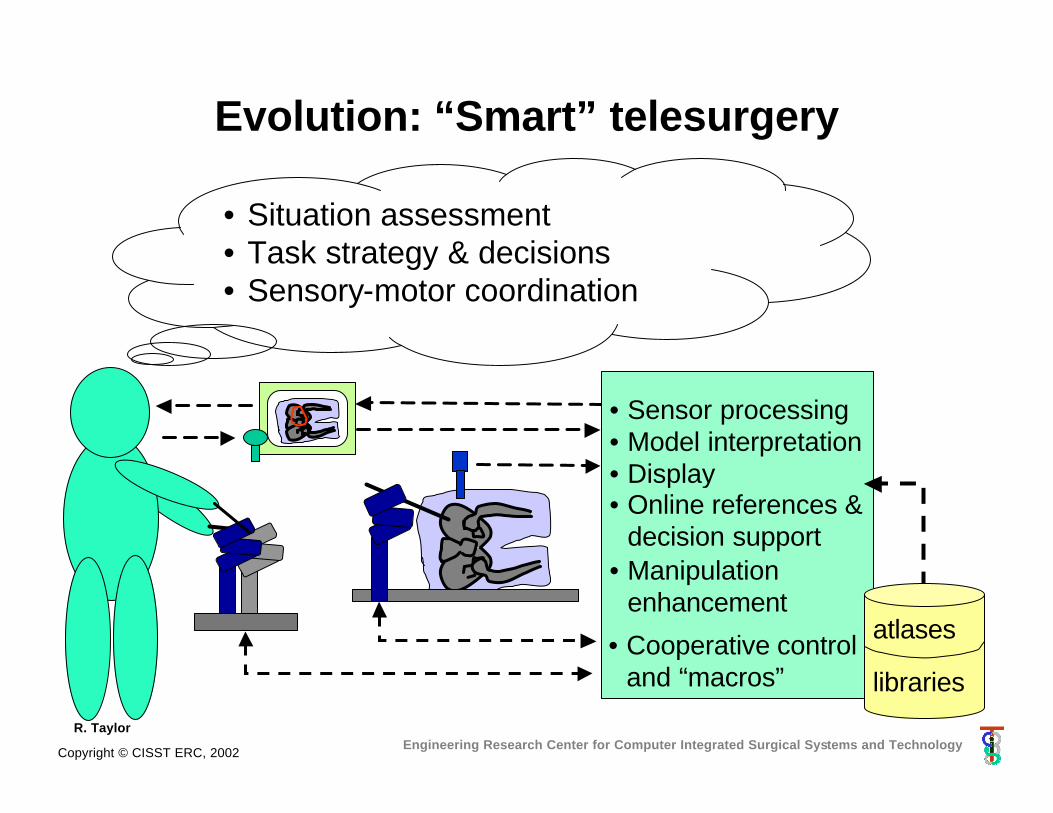
Evolution: “Smart” telesurgery
• Situation assessment• Task strategy & decisions• Sensory-motor coordination
Augmentation System
• Sensor processing• Model interpretation• Display
atlases
• Manipulation enhancement
• Online references & decision support
• Cooperative control and “macros”
atlases
libraries
R. Taylor
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
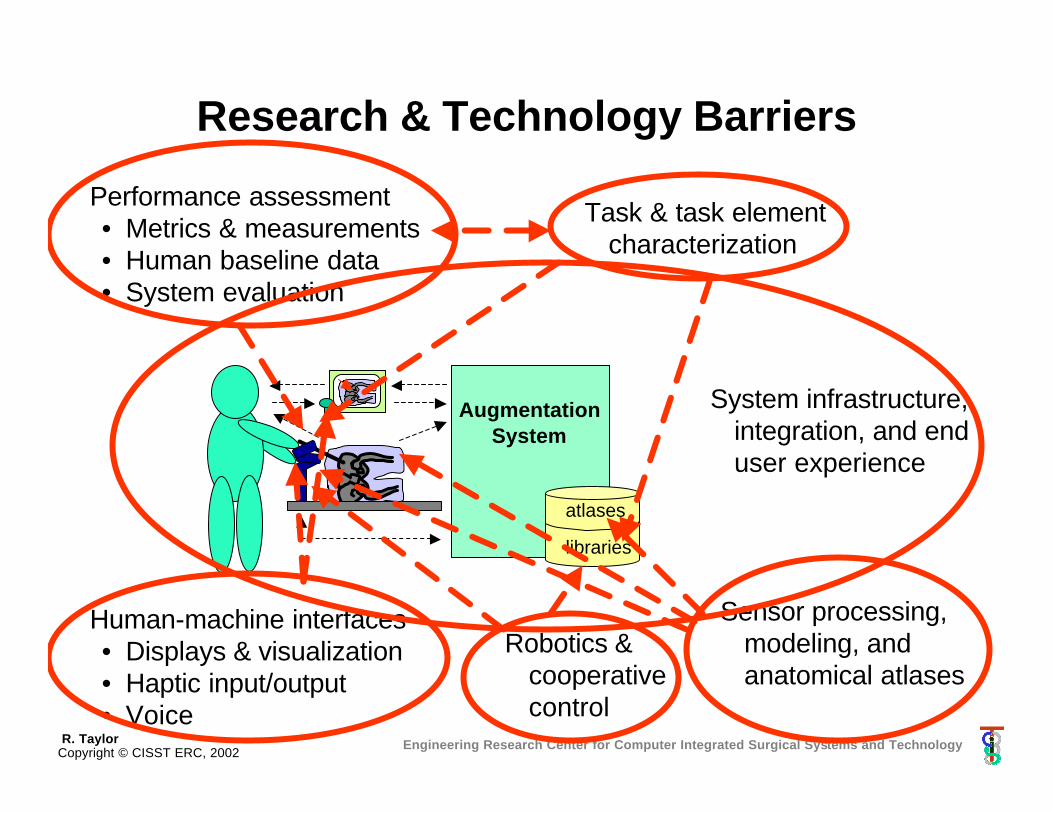
Research & Technology Barriers
Augmentation System
atlases
libraries
Performance assessment• Metrics & measurements • Human baseline data• System evaluation
Robotics & cooperative control
Human-machine interfaces• Displays & visualization • Haptic input/output• Voice
Sensor processing, modeling, and anatomical atlases
Task & task element characterization
System infrastructure, integration, and end user experience
R. Taylor

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Computer-Integrated Surgery
• Surgical CAD/CAM Systems
• Surgical Assistant Systems
• Concluding remarks

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
Research and technology barriers
Modeling & analysis• Segmentation• Registration• Atlases• Optimization• Visualization• Task characterization• etc.
Interface Technology• Sensing• Robotics• Human-machine
interfacesSystems• Safety & verifiability• Usability & maintainability• Performance and validation

Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
How can we get there?
Strong and committed teams
– Surgeons– Engineers– Industry
Focus on systems that address important needs
Rapid iteration with measurable goals
Have fun!
Copyright © CISST ERC, 2002Engineering Research Center for Computer Integrated Surgical Systems and Technology
The real bottom line: patient care
• Provide new capabilities that transcend human limitations in surgery
• Increase consistency and quality of surgical treatments
• Promote better outcomesand more cost-effectiveprocesses in surgical practice