container orchestration from theory to practice
TRANSCRIPT
Stephen Day & Laura Frank
Container Orchestration from Theory to Practice
Agenda● Understanding the SwarmKit object
model● Node topology● Distributed consensus and Raft
An open source framework for building orchestration systemsgithub.com/docker/swarmkit
SwarmKit
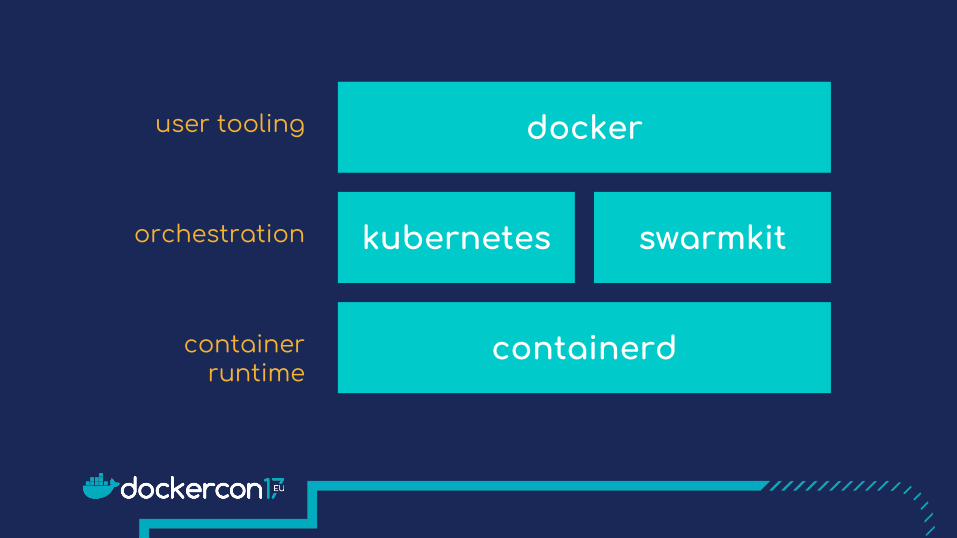
containerd
kubernetes
docker
swarmkitorchestration
container runtime
user tooling
OrchestrationThe Old Way
Cluster
https://en.wikipedia.org/wiki/Control_theory
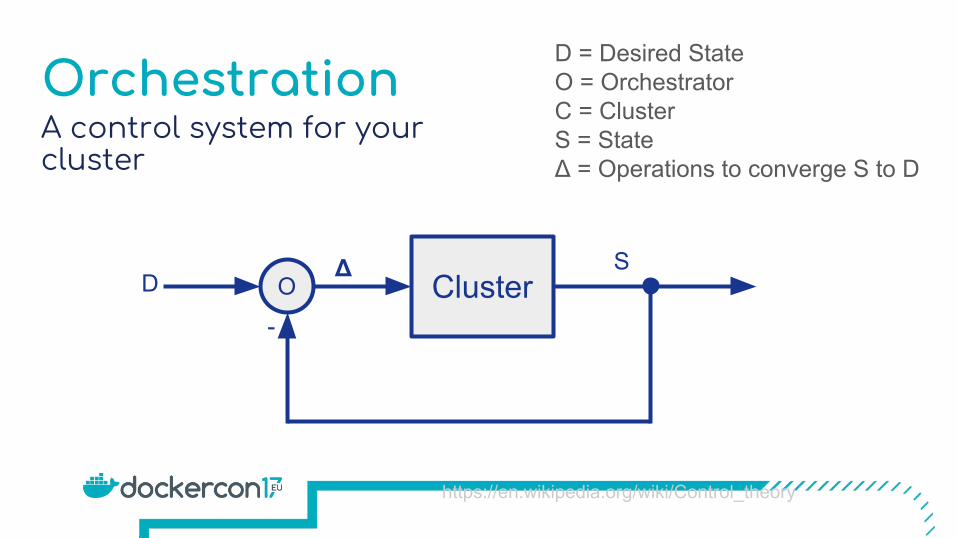
OrchestrationA control system for your cluster
ClusterO
-
Δ SD
D = Desired StateO = OrchestratorC = ClusterS = StateΔ = Operations to converge S to D
https://en.wikipedia.org/wiki/Control_theory
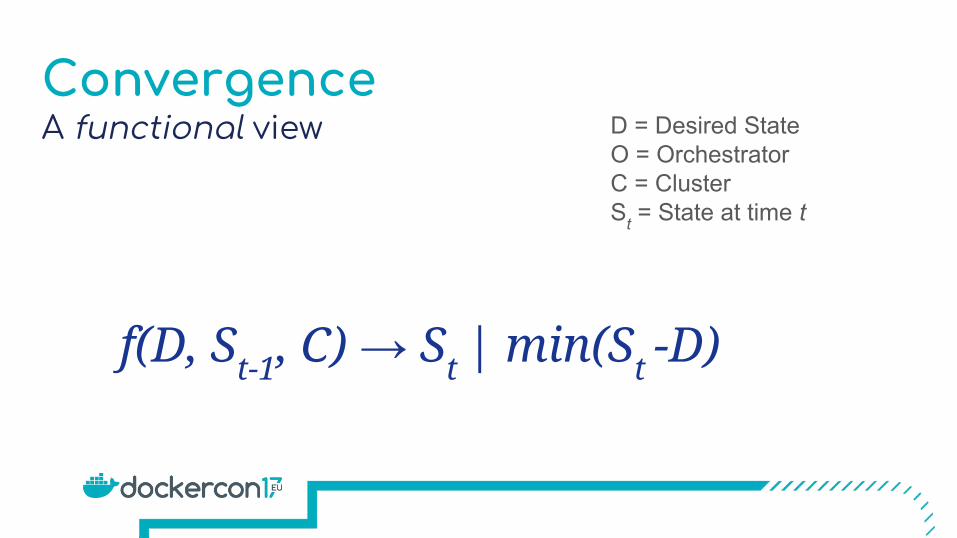
ConvergenceA functional view D = Desired State
O = OrchestratorC = ClusterSt = State at time t
f(D, St-1, C) → St | min(St -D)
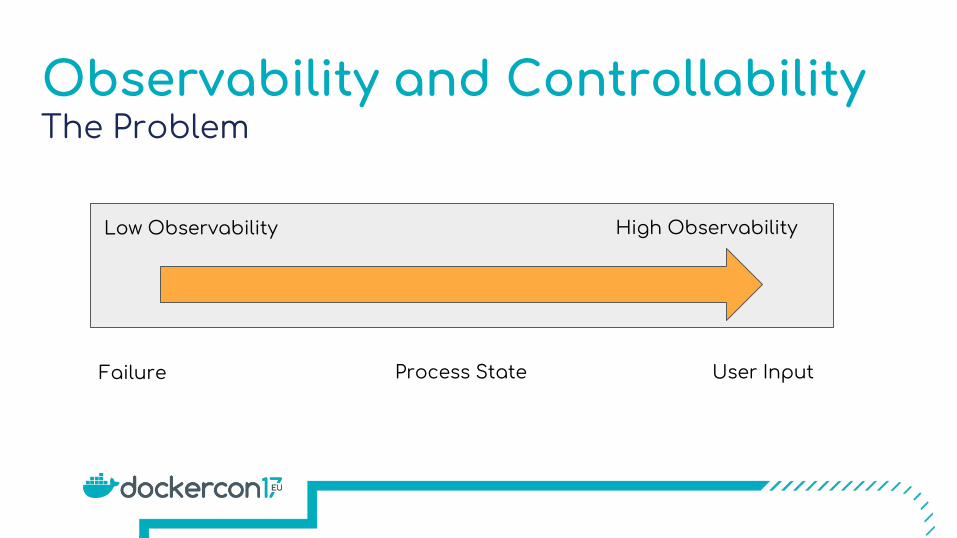
Observability and ControllabilityThe Problem
Low Observability High Observability
Failure Process State User Input
SwarmKit Object Model
Data Model Requirements● Represent difference in cluster state● Maximize observability● Support convergence● Do this while being extensible and reliable
Show me your data structures and I’ll show you your orchestration system
Services● Express desired state of the cluster● Abstraction to control a set of containers● Enumerates resources, network availability, placement● Leave the details of runtime to container process● Implement these services by distributing processes across a
cluster
Node 1 Node 2 Node 3
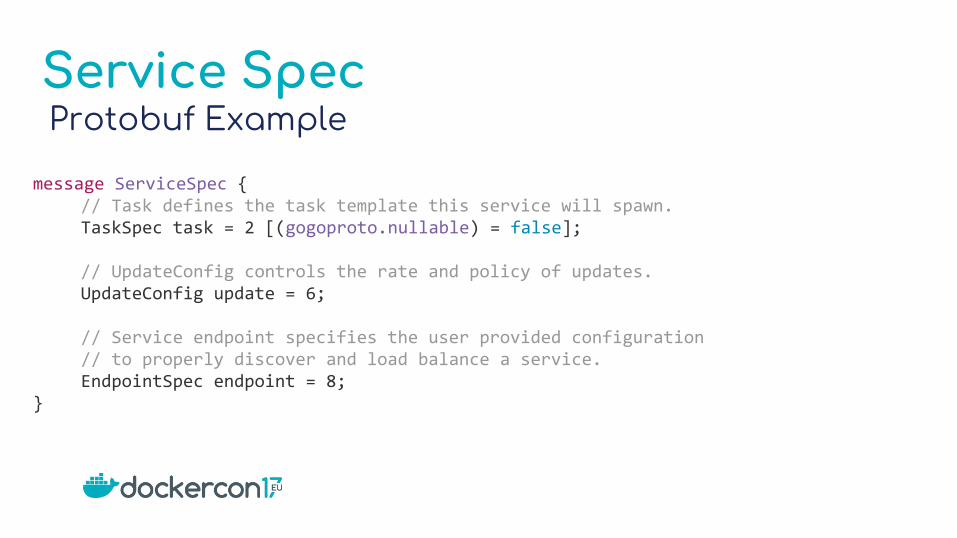
message ServiceSpec {// Task defines the task template this service will spawn.TaskSpec task = 2 [(gogoproto.nullable) = false];
// UpdateConfig controls the rate and policy of updates.UpdateConfig update = 6;
// Service endpoint specifies the user provided configuration// to properly discover and load balance a service.EndpointSpec endpoint = 8;
}
Service SpecProtobuf Example
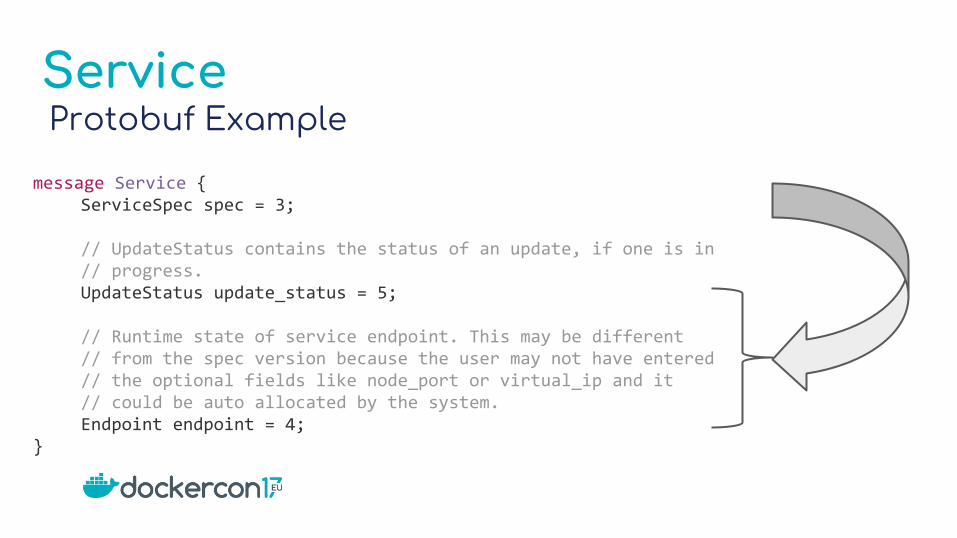
message Service {ServiceSpec spec = 3;
// UpdateStatus contains the status of an update, if one is in// progress.UpdateStatus update_status = 5;
// Runtime state of service endpoint. This may be different// from the spec version because the user may not have entered// the optional fields like node_port or virtual_ip and it// could be auto allocated by the system.Endpoint endpoint = 4;
}
ServiceProtobuf Example
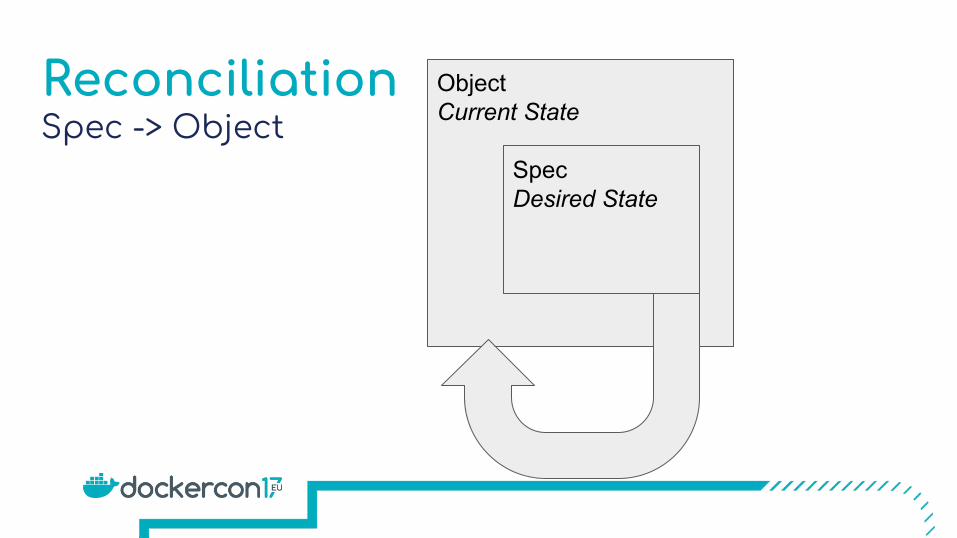
ObjectCurrent State
SpecDesired State
ReconciliationSpec -> Object
Prepare: setup resourcesStart: start the taskWait: wait until task exitsShutdown: stop task, cleanly
Task ModelRuntime
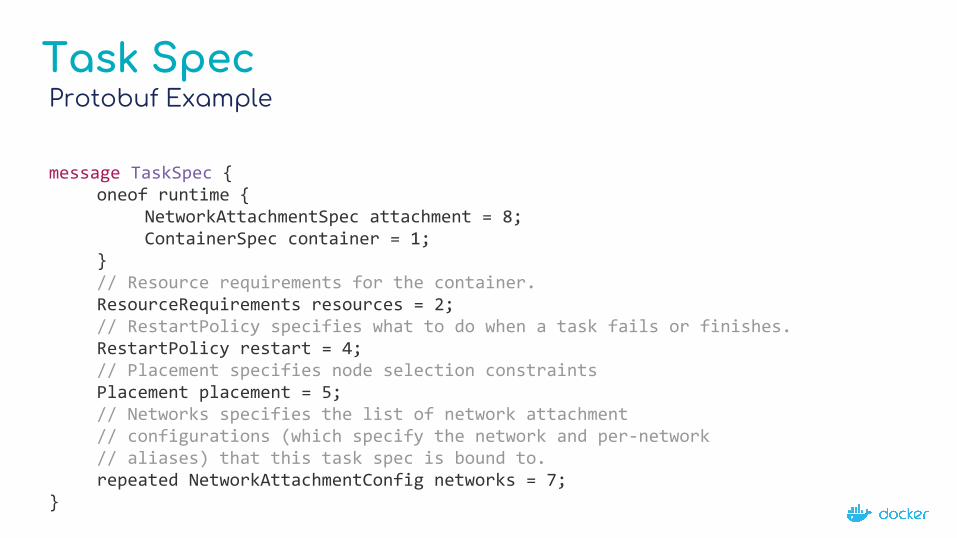
message TaskSpec {oneof runtime {
NetworkAttachmentSpec attachment = 8;ContainerSpec container = 1;
}// Resource requirements for the container.ResourceRequirements resources = 2;// RestartPolicy specifies what to do when a task fails or finishes.RestartPolicy restart = 4;// Placement specifies node selection constraintsPlacement placement = 5;// Networks specifies the list of network attachment// configurations (which specify the network and per-network// aliases) that this task spec is bound to.repeated NetworkAttachmentConfig networks = 7;
}
Task SpecProtobuf Example
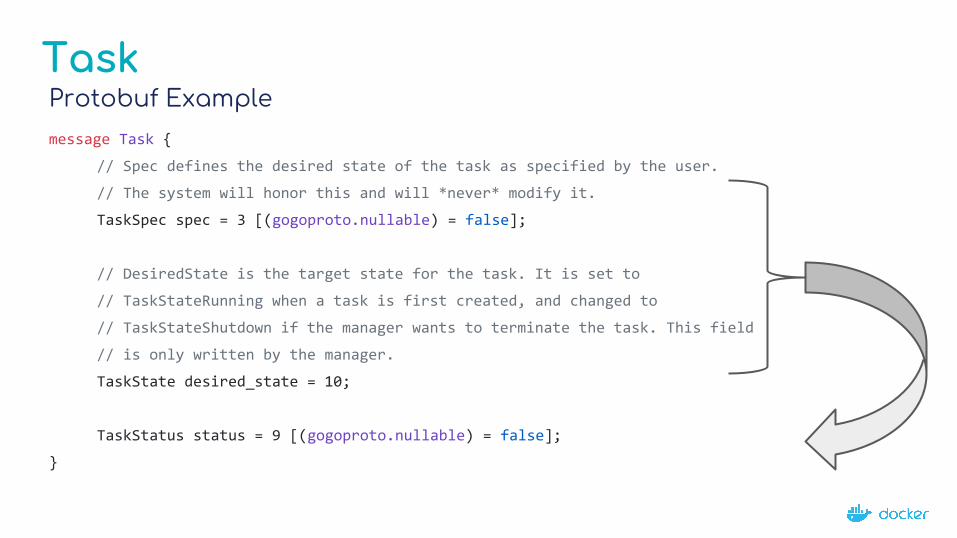
message Task {
// Spec defines the desired state of the task as specified by the user.
// The system will honor this and will *never* modify it.
TaskSpec spec = 3 [(gogoproto.nullable) = false];
// DesiredState is the target state for the task. It is set to
// TaskStateRunning when a task is first created, and changed to
// TaskStateShutdown if the manager wants to terminate the task. This field
// is only written by the manager.
TaskState desired_state = 10;
TaskStatus status = 9 [(gogoproto.nullable) = false];
}
TaskProtobuf Example
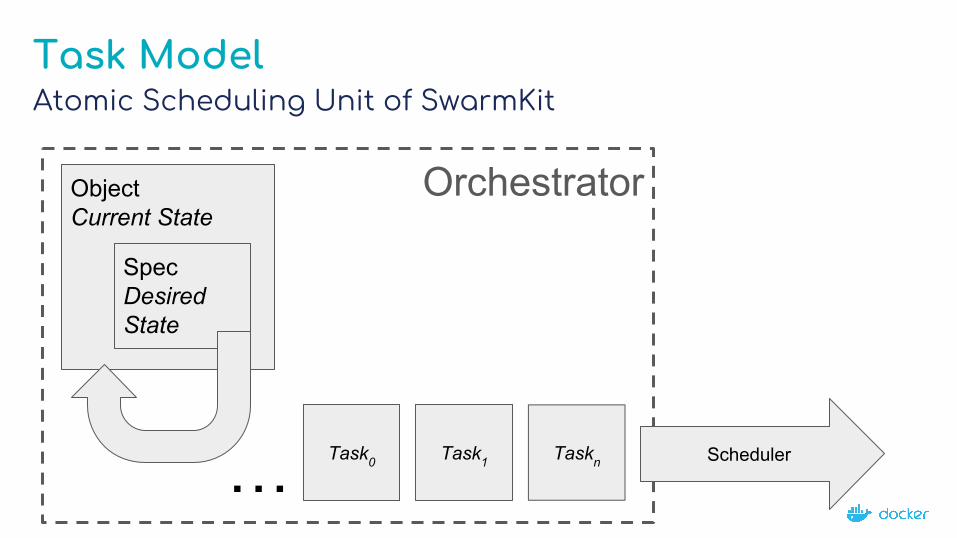
Orchestrator
Task ModelAtomic Scheduling Unit of SwarmKit
ObjectCurrent State
SpecDesired State
Task0 Task1… Taskn Scheduler
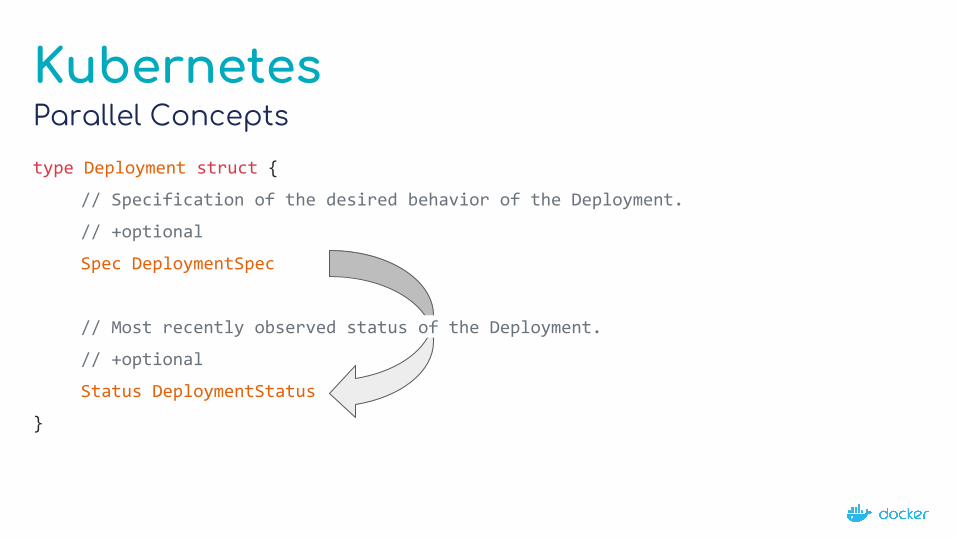
Kubernetestype Deployment struct {
// Specification of the desired behavior of the Deployment.
// +optional
Spec DeploymentSpec
// Most recently observed status of the Deployment.
// +optional
Status DeploymentStatus
}
Parallel Concepts
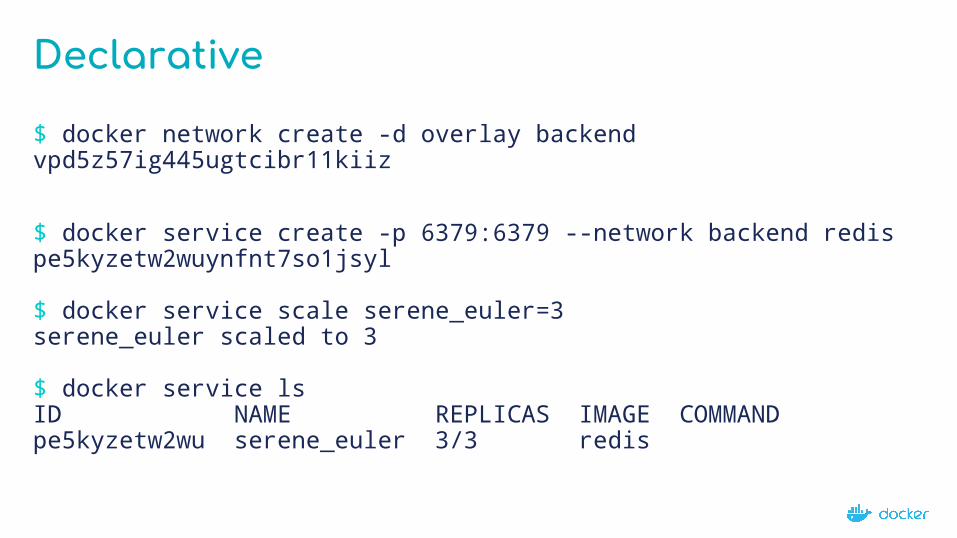
Declarative$ docker network create -d overlay backend vpd5z57ig445ugtcibr11kiiz
$ docker service create -p 6379:6379 --network backend redis pe5kyzetw2wuynfnt7so1jsyl
$ docker service scale serene_euler=3 serene_euler scaled to 3
$ docker service ls ID NAME REPLICAS IMAGE COMMANDpe5kyzetw2wu serene_euler 3/3 redis

Peanut Butter Demo Time!
And now with jelly!
Consistency
Manager
TaskTask
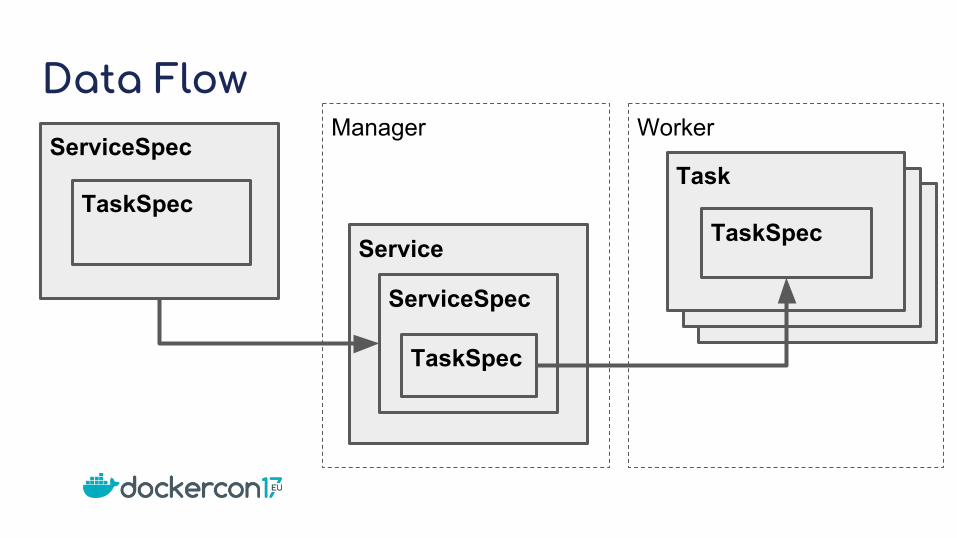
Data FlowServiceSpec
TaskSpec
Service
ServiceSpec
TaskSpec
Task
TaskSpec
Worker
Only one component of the system can write to a field
Field OwnershipConsistency
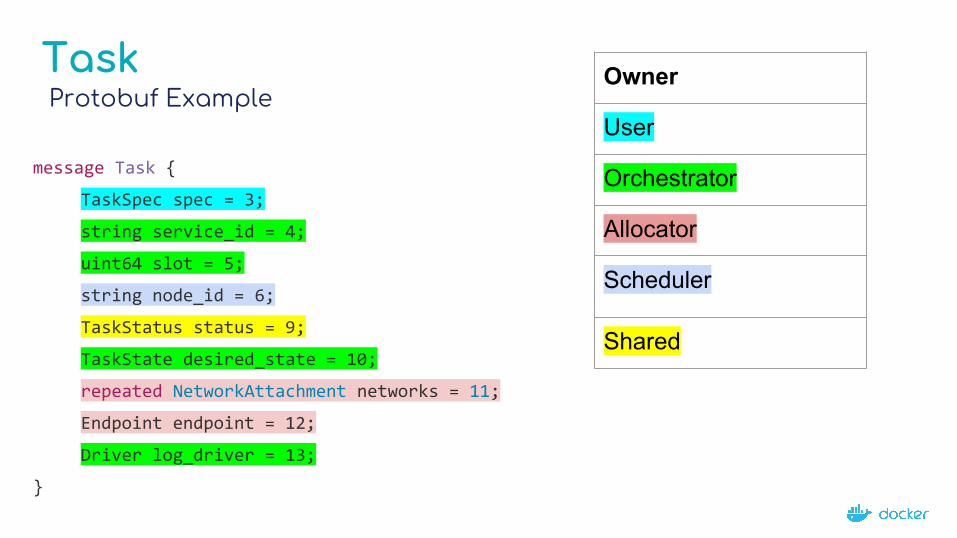
message Task {
TaskSpec spec = 3;
string service_id = 4;
uint64 slot = 5;
string node_id = 6;
TaskStatus status = 9;
TaskState desired_state = 10;
repeated NetworkAttachment networks = 11;
Endpoint endpoint = 12;
Driver log_driver = 13;
}
Owner
User
Orchestrator
Allocator
Scheduler
Shared
TaskProtobuf Example
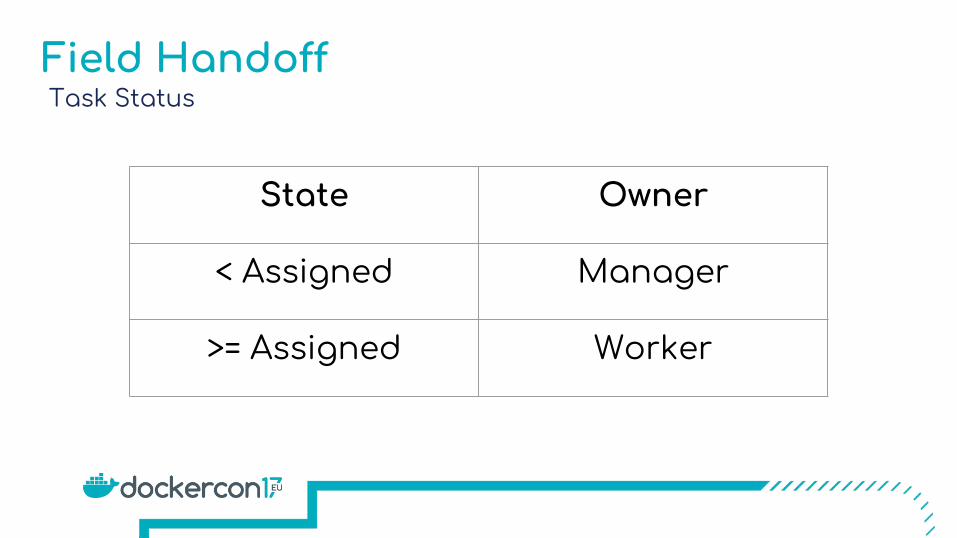
State Owner
< Assigned Manager
>= Assigned Worker
Field HandoffTask Status
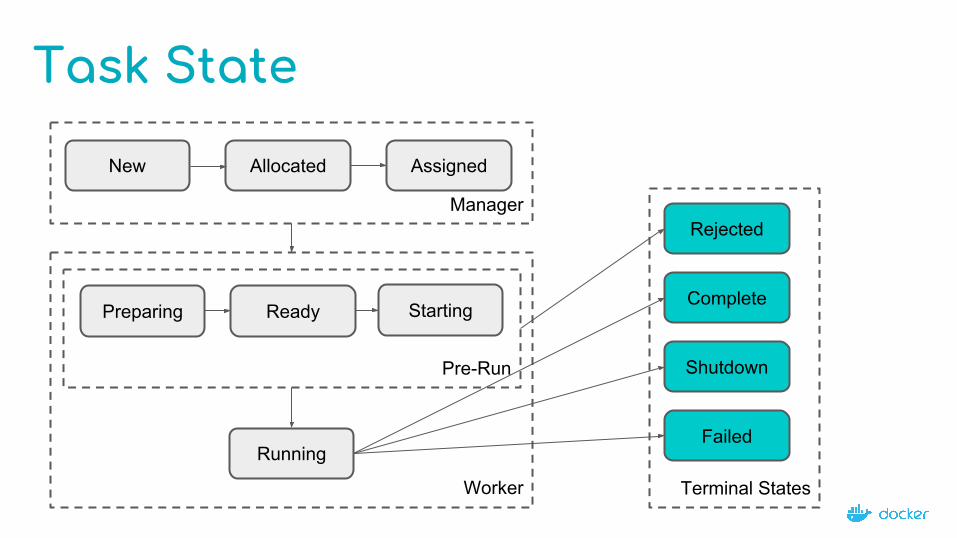
Worker
Pre-Run
Preparing
Manager
Terminal States
Task StateNew Allocated Assigned
Ready Starting
Running
Complete
Shutdown
Failed
Rejected
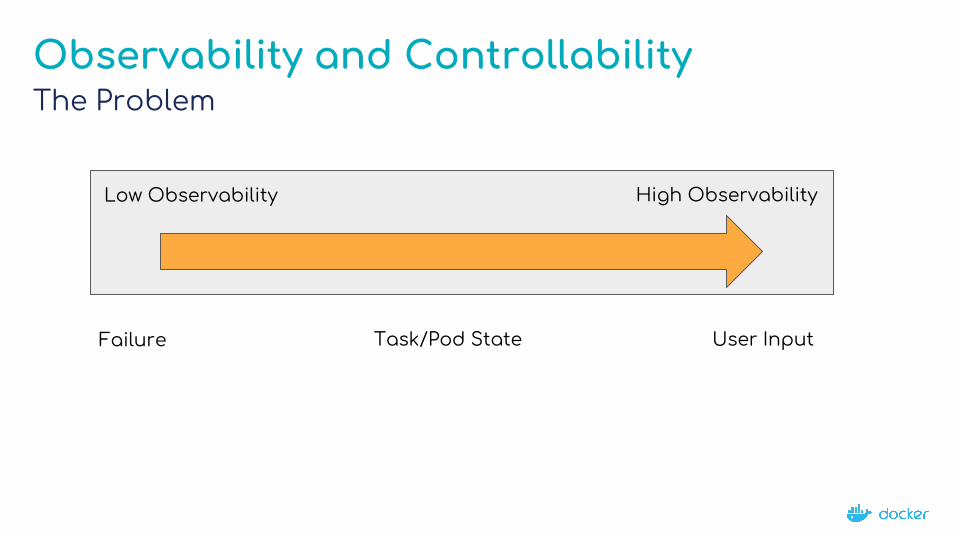
Observability and ControllabilityThe Problem
Low Observability High Observability
Failure Task/Pod State User Input

Node Topology in SwarmKit

We’ve got a bunch of nodes… now what?
Task management is only half the fun. These tasks can be scheduled across a cluster for HA!
We’ve got a bunch of nodes… now what?
Your cluster needs to communicate.
● Not the mechanism, but the sequence and frequency
● Three scenarios important to us now○ Node registration○ Workload dispatching○ State reporting
Manager <-> Worker Communication
● Most approaches take the form of two patterns○ Push, where the Managers push to the
Workers○ Pull, where the Workers pull from the
Managers
Manager <-> Worker Communication
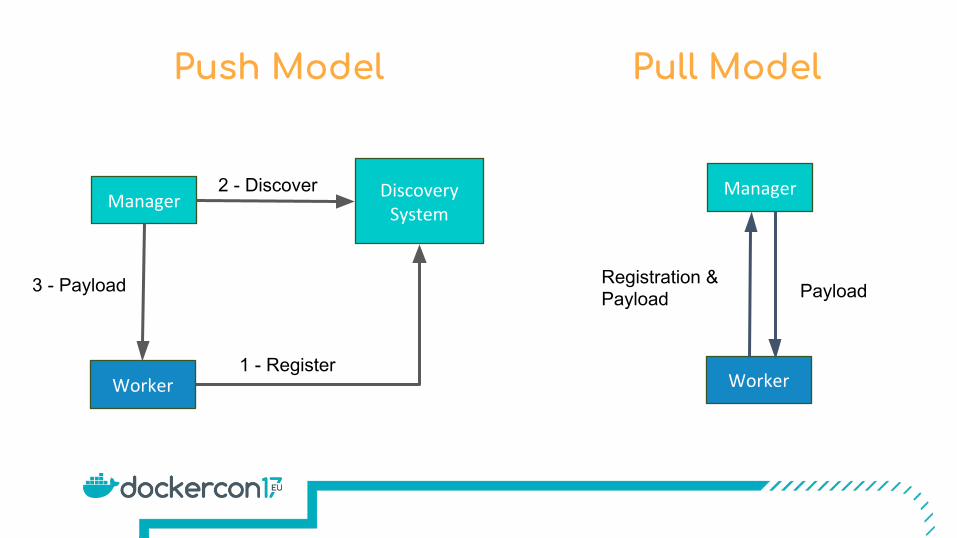
3 - Payload
1 - Register
2 - Discover
Registration &Payload
Push Model Pull Model
Payload
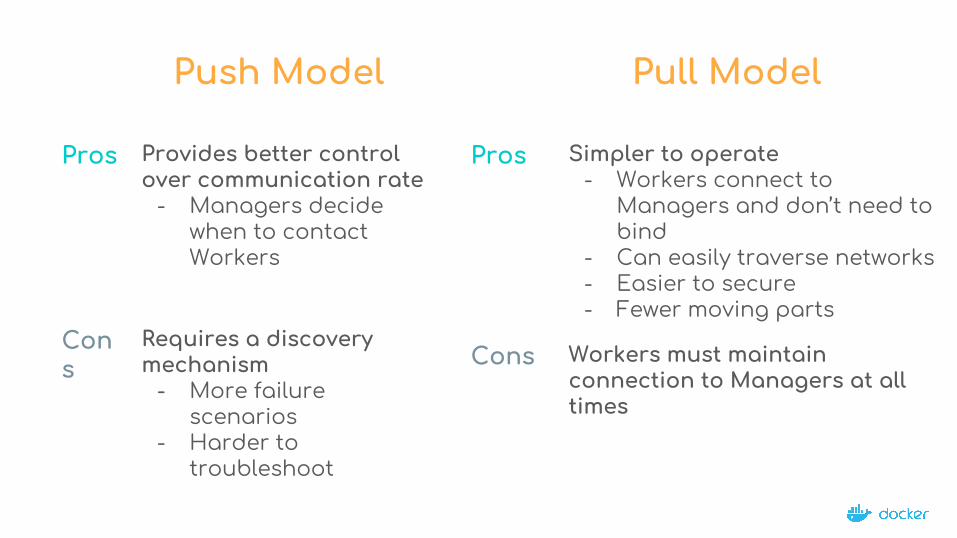
Pros Provides better control over communication rate
- Managers decide when to contact Workers
Cons
Requires a discovery mechanism
- More failure scenarios
- Harder to troubleshoot
Pros Simpler to operate- Workers connect to
Managers and don’t need to bind
- Can easily traverse networks- Easier to secure- Fewer moving parts
Cons Workers must maintain connection to Managers at all times
Push Model Pull Model
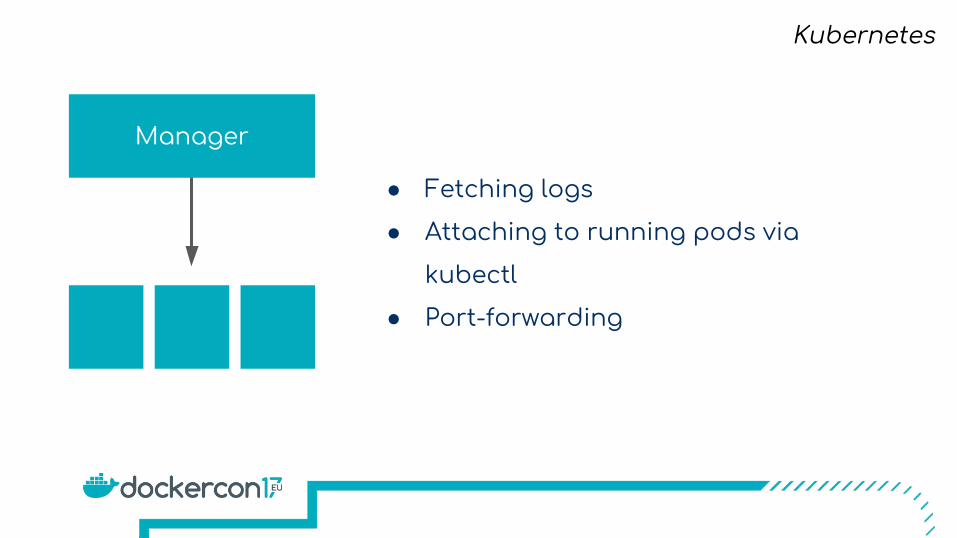
● Fetching logs● Attaching to running pods via
kubectl● Port-forwarding
Manager
Kubernetes
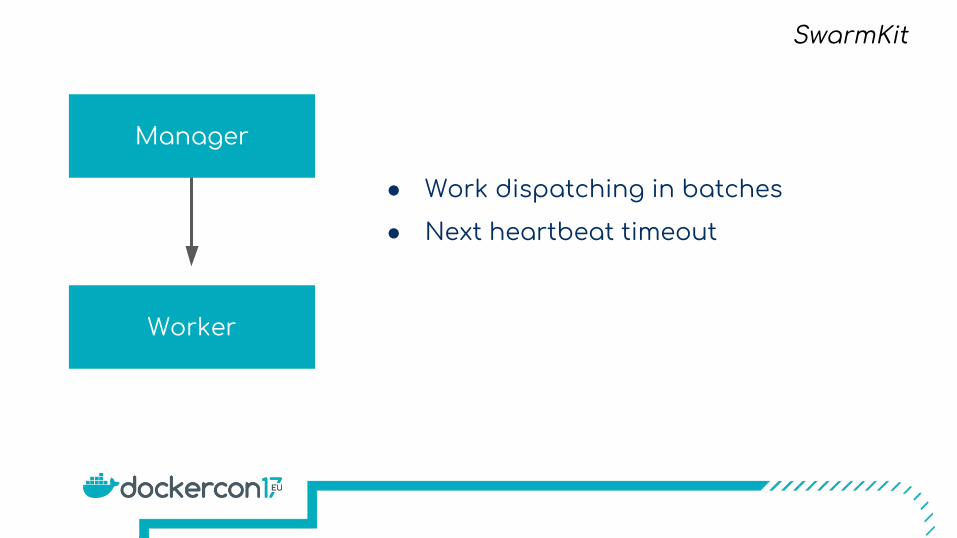
● Work dispatching in batches● Next heartbeat timeout
Manager
Worker
SwarmKit
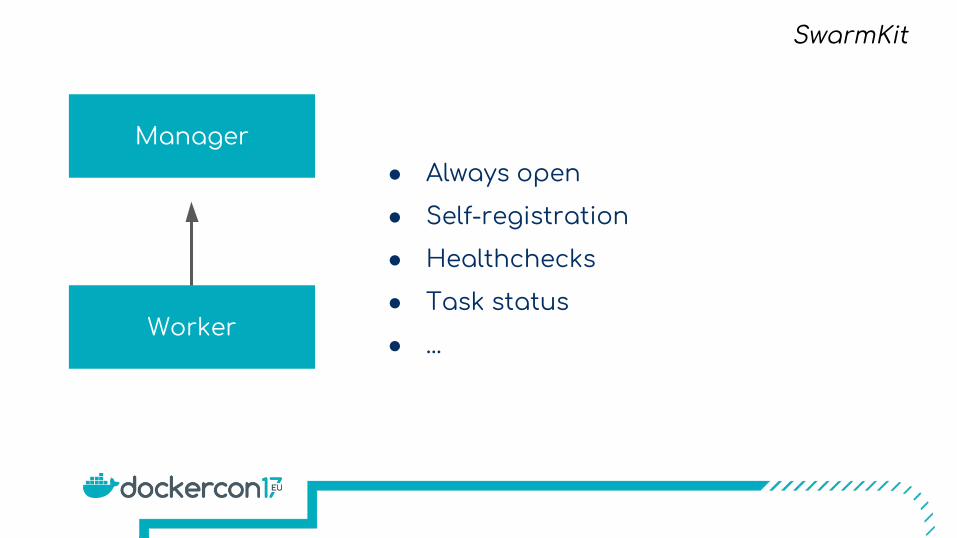
● Always open● Self-registration● Healthchecks● Task status● ...
Manager
Worker
SwarmKit

Rate Control in SwarmKit
Rate Control: Heartbeats
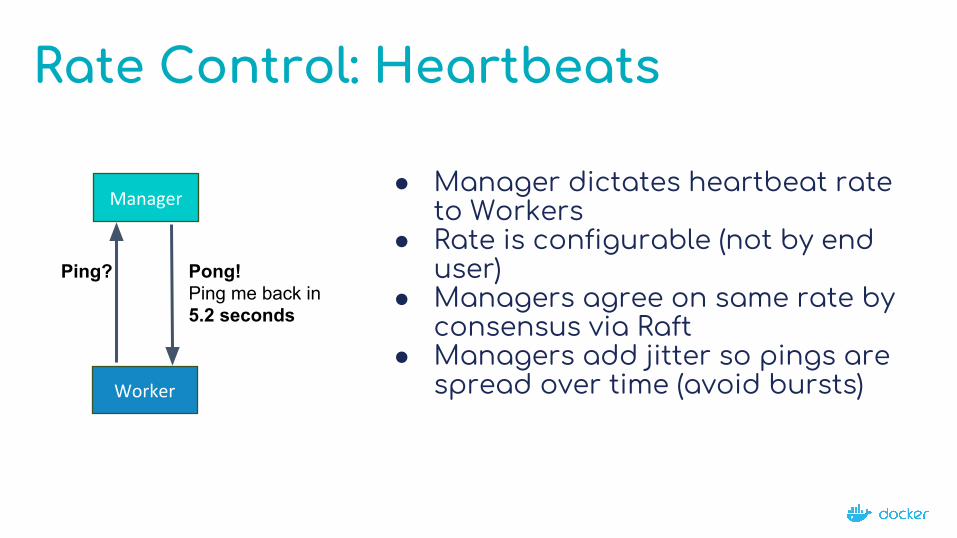
● Manager dictates heartbeat rate to Workers
● Rate is configurable (not by end user)
● Managers agree on same rate by consensus via Raft
● Managers add jitter so pings are spread over time (avoid bursts)
Ping? Pong!Ping me back in 5.2 seconds
Rate Control: Workloads
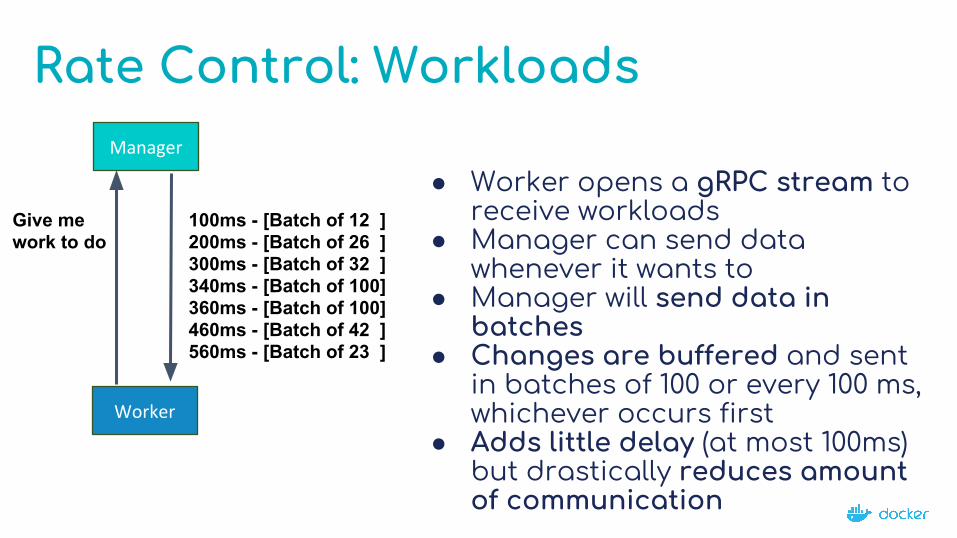
● Worker opens a gRPC stream to receive workloads
● Manager can send data whenever it wants to
● Manager will send data in batches
● Changes are buffered and sent in batches of 100 or every 100 ms, whichever occurs first
● Adds little delay (at most 100ms) but drastically reduces amount of communication
Give me work to do
100ms - [Batch of 12 ]200ms - [Batch of 26 ]300ms - [Batch of 32 ]340ms - [Batch of 100]360ms - [Batch of 100]460ms - [Batch of 42 ]560ms - [Batch of 23 ]

Distributed Consensus
The Raft Consensus Algorithm● This talk is about SwarmKit, but Raft is also
used by Kubernetes● The implementation is slightly different but
the behavior is the same
The Raft Consensus AlgorithmSwarmKit and Kubernetes don’t make the decision about how to handle leader election and log replication, Raft does!
github.com/kubernetes/kubernetes/tree/master/vendor/github.com/coreos/etcd/raft
github.com/docker/swarmkit/tree/master/vendor/github.com/coreos/etcd/raft
No really...
The Raft Consensus Algorithm
secretlivesofdata.comWant to know more about Raft?
Single Source of Truth● SwarmKit implements Raft directly, instead
of via etcd● The logs live in /var/lib/docker/swarm● Or /var/lib/etcd/member/wal● Easy to observe (and even read)

Manager <-> Worker CommunicationIn Swarmkit
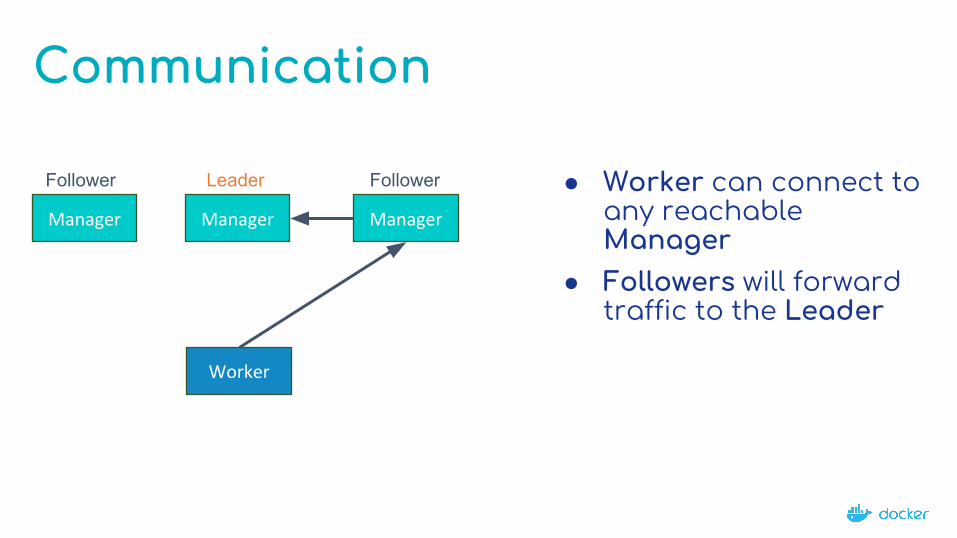
Communication
Leader FollowerFollower ● Worker can connect to any reachable Manager
● Followers will forward traffic to the Leader
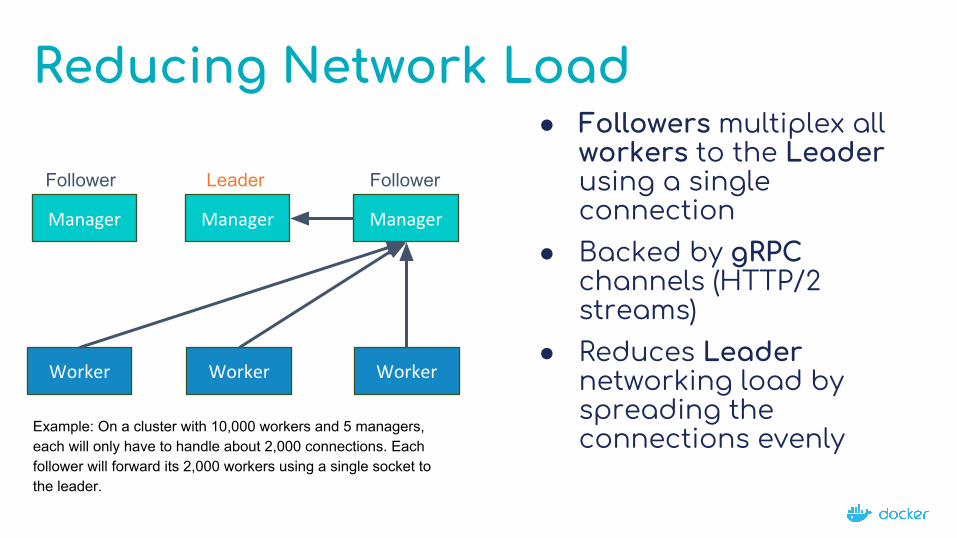
Reducing Network Load● Followers multiplex all
workers to the Leader using a single connection
● Backed by gRPC channels (HTTP/2 streams)
● Reduces Leader networking load by spreading the connections evenlyExample: On a cluster with 10,000 workers and 5 managers,
each will only have to handle about 2,000 connections. Each follower will forward its 2,000 workers using a single socket to the leader.
Leader FollowerFollower
Leader FollowerFollower
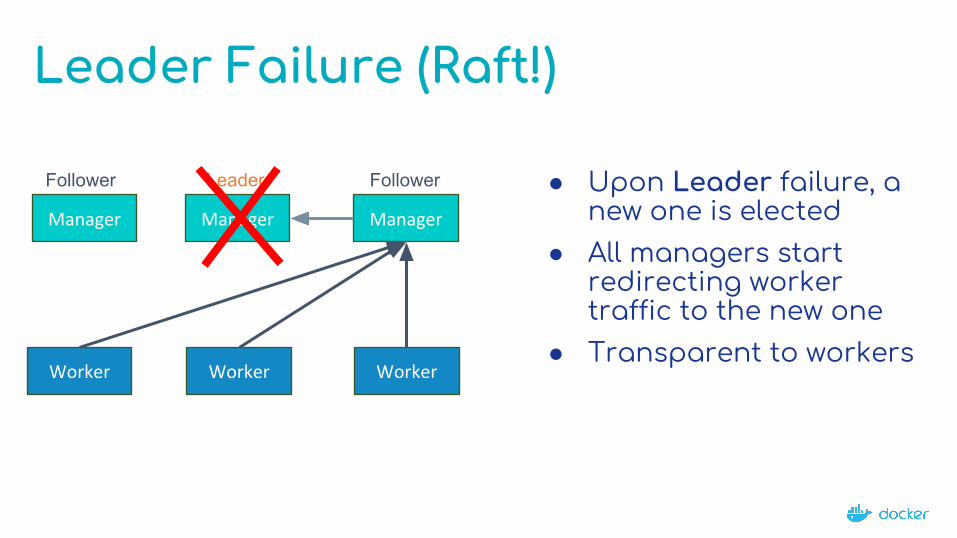
Leader Failure (Raft!)
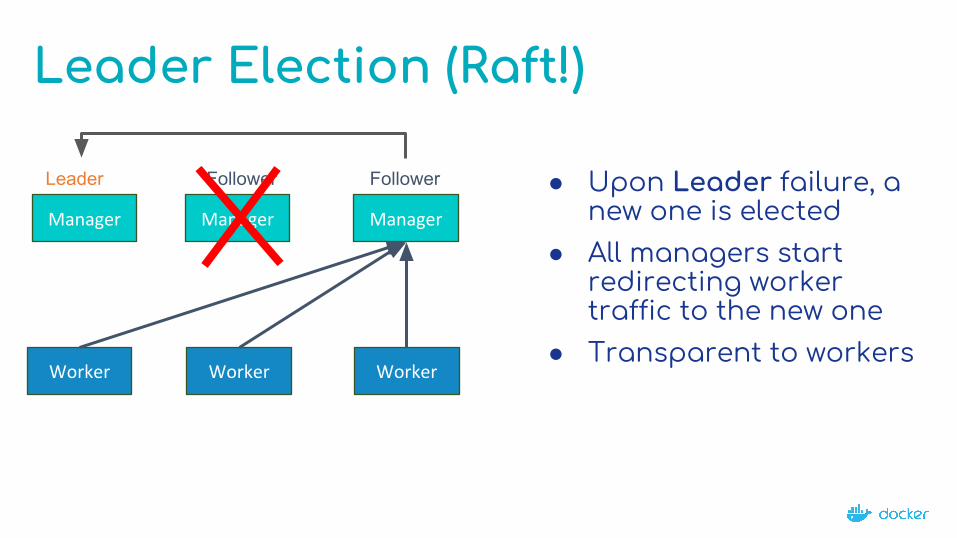
● Upon Leader failure, a new one is elected
● All managers start redirecting worker traffic to the new one
● Transparent to workers
Leader Election (Raft!)
Follower FollowerLeader ● Upon Leader failure, a new one is elected
● All managers start redirecting worker traffic to the new one
● Transparent to workers
Manager Failure
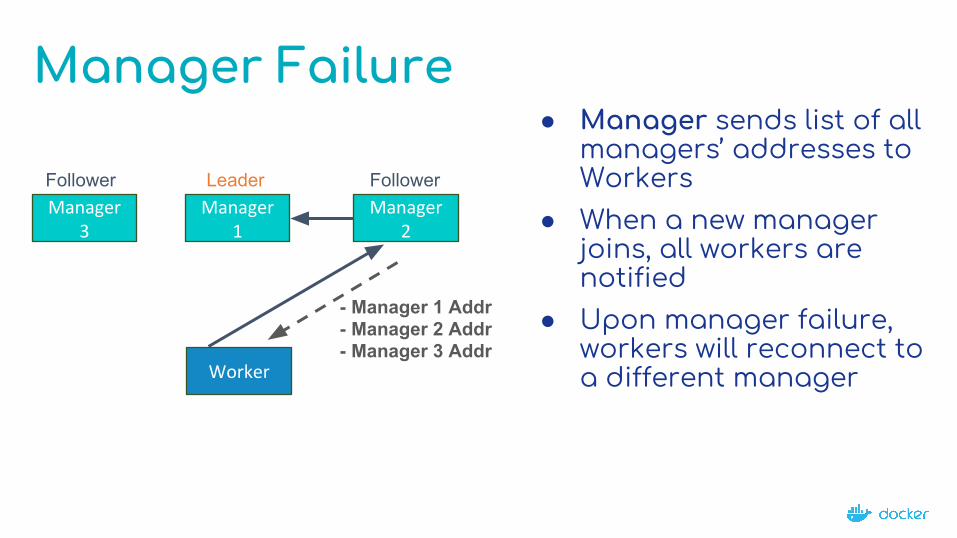
- Manager 1 Addr- Manager 2 Addr- Manager 3 Addr
● Manager sends list of all managers’ addresses to Workers
● When a new manager joins, all workers are notified
● Upon manager failure, workers will reconnect to a different manager
Leader FollowerFollower
Leader FollowerFollower
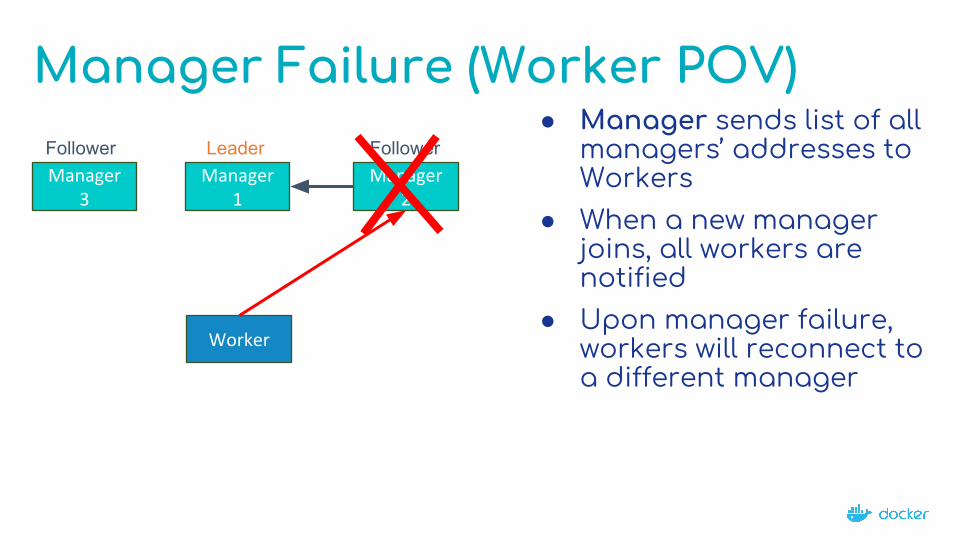
Manager Failure (Worker POV)● Manager sends list of all
managers’ addresses to Workers
● When a new manager joins, all workers are notified
● Upon manager failure, workers will reconnect to a different manager
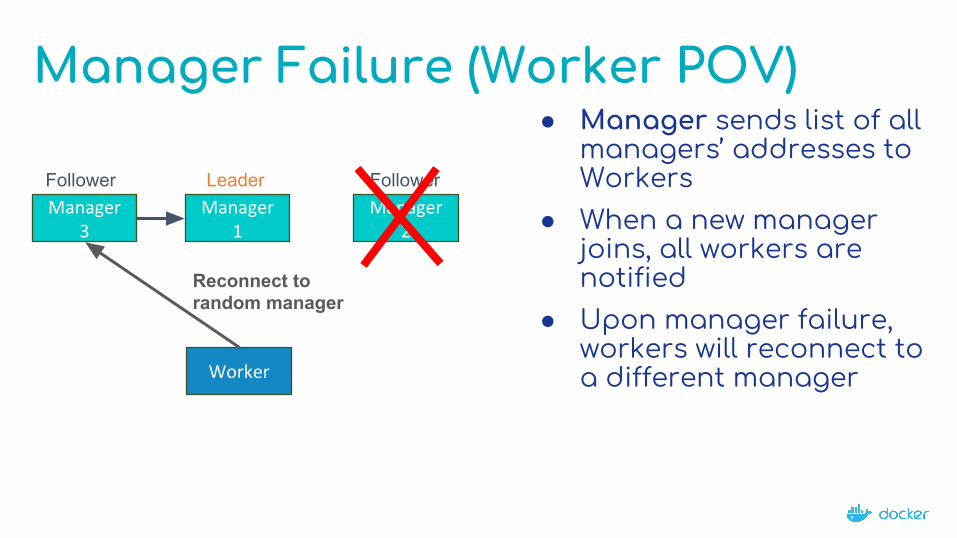
Manager Failure (Worker POV)
Leader FollowerFollower
Reconnect to random manager
● Manager sends list of all managers’ addresses to Workers
● When a new manager joins, all workers are notified
● Upon manager failure, workers will reconnect to a different manager

PresenceScalable presence in a distributed environment
Presence● Swarm still handles node management, even if you use the
Kubernetes scheduler● Manager Leader commits Worker state (Up or Down) into
Raft○ Propagates to all managers via Raft○ Recoverable in case of leader re-election
Presence● Heartbeat TTLs kept in Manager Leader memory
○ Otherise, every ping would result in a quorum write○ Leader keeps worker<->TTL in a heap (time.AfterFunc)○ Upon leader failover workers are given a grace period to
reconnect■ Workers considered Unknown until they reconnect■ If they do they move back to Up■ If they don’t they move to Down
Consistency
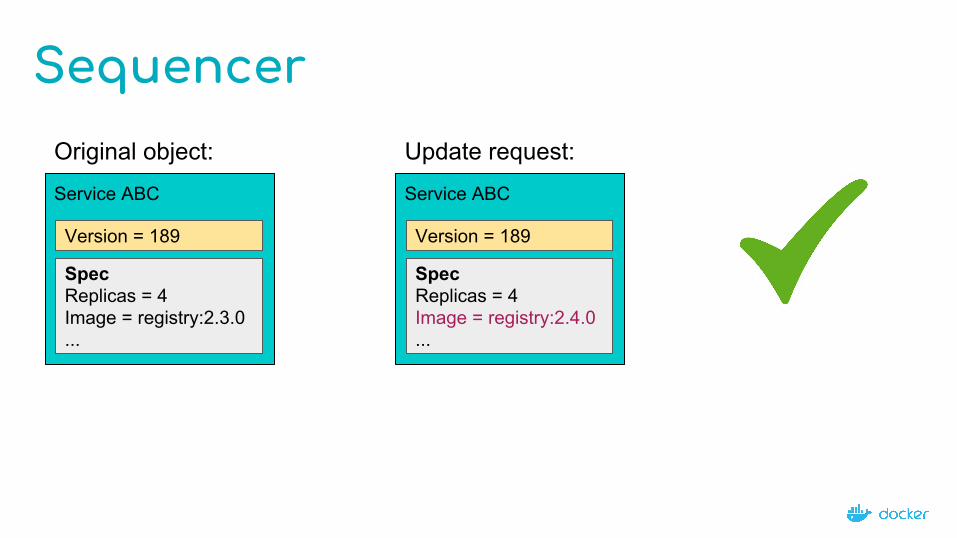
Sequencer
● Every object in the store has a Version field● Version stores the Raft index when the object was last
updated● Updates must provide a base Version; are rejected if it is out
of date● Provides CAS semantics● Also exposed through API calls that change objects in the
store
Versioned UpdatesConsistency
service := getCurrentService()
spec := service.Spec
spec.Image = "my.serv/myimage:mytag"
update(spec, service.Version)
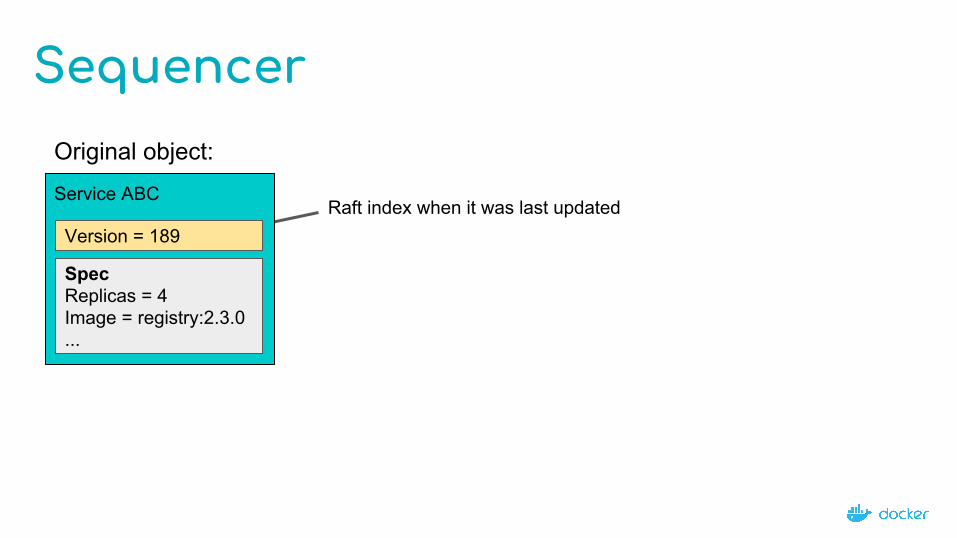
SequencerOriginal object:
Raft index when it was last updatedService ABC
Version = 189
SpecReplicas = 4Image = registry:2.3.0...
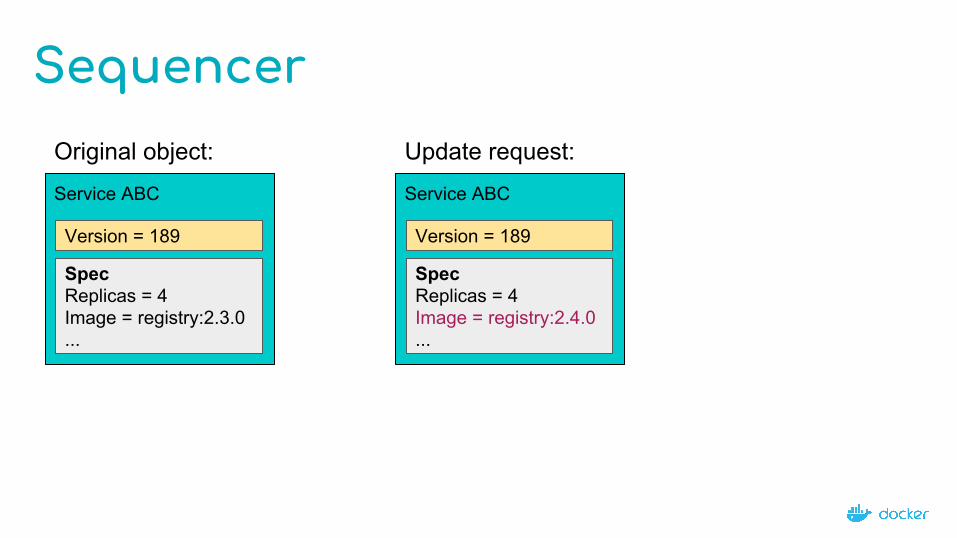
Sequencer
Service ABC
SpecReplicas = 4Image = registry:2.3.0...
Version = 189
Service ABC
SpecReplicas = 4Image = registry:2.4.0...
Version = 189
Update request: Original object:
Sequencer
Service ABC
SpecReplicas = 4Image = registry:2.3.0...
Version = 189
Original object:
Service ABC
SpecReplicas = 4Image = registry:2.4.0...
Version = 189
Update request:
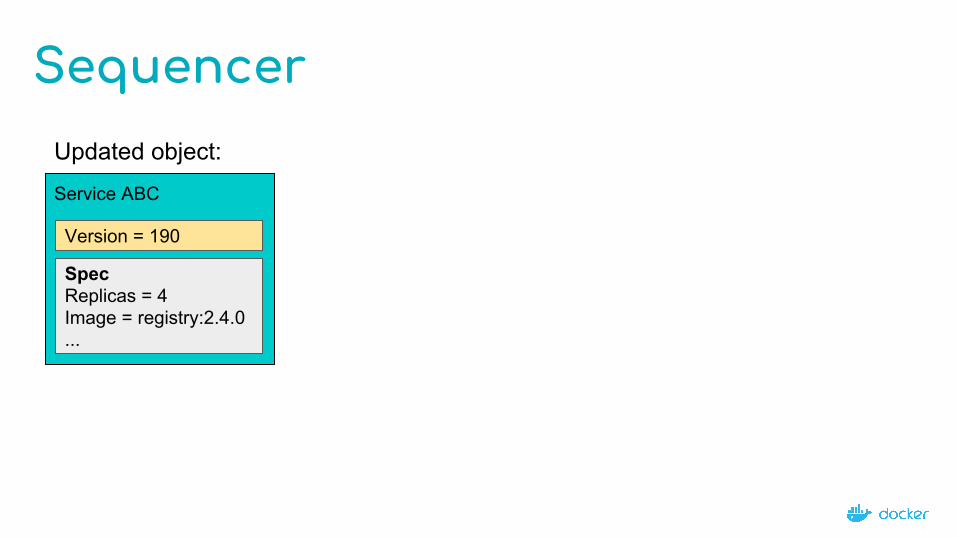
Sequencer
Service ABC
SpecReplicas = 4Image = registry:2.4.0...
Version = 190
Updated object:
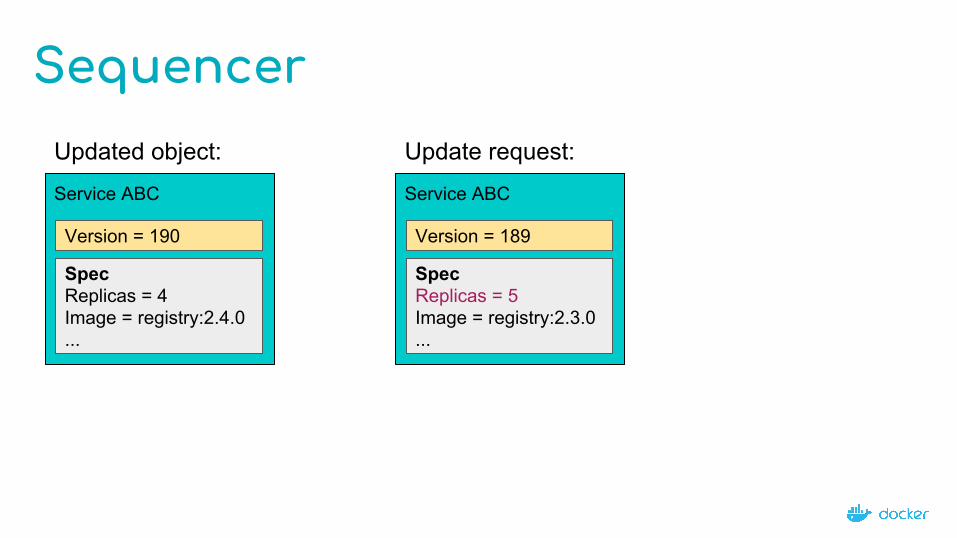
Sequencer
Service ABC
SpecReplicas = 4Image = registry:2.4.0...
Version = 190
Service ABC
SpecReplicas = 5Image = registry:2.3.0...
Version = 189
Update request: Updated object:
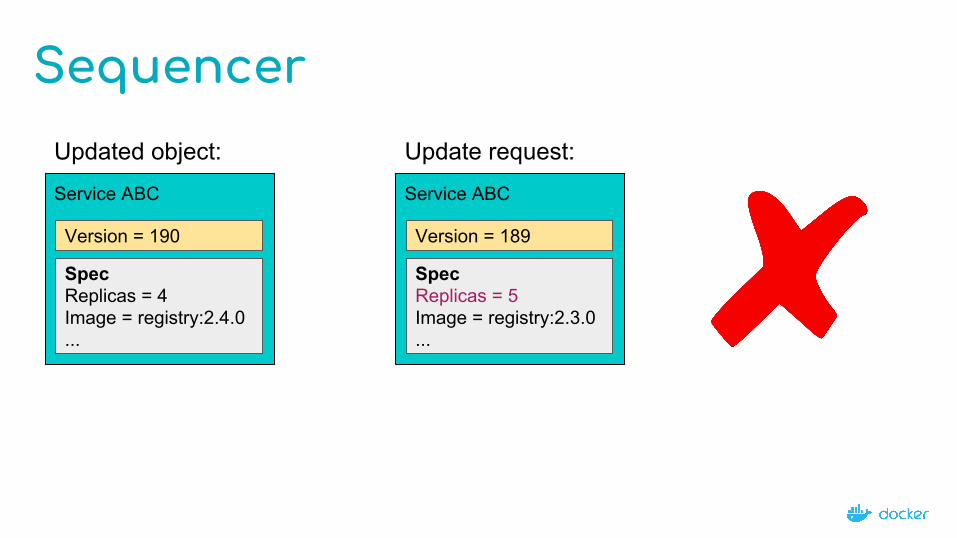
Sequencer
Service ABC
SpecReplicas = 4Image = registry:2.4.0...
Version = 190
Service ABC
SpecReplicas = 5Image = registry:2.3.0...
Version = 189
Update request: Updated object:
github.com/docker/swarmkitgithub.com/coreos/etcd (Raft)

Thank you!
@stevvooe@rhein_wein