context-dependent network agents specific technology goals of funded effort: distributed computation...
Post on 20-Dec-2015
213 views
TRANSCRIPT
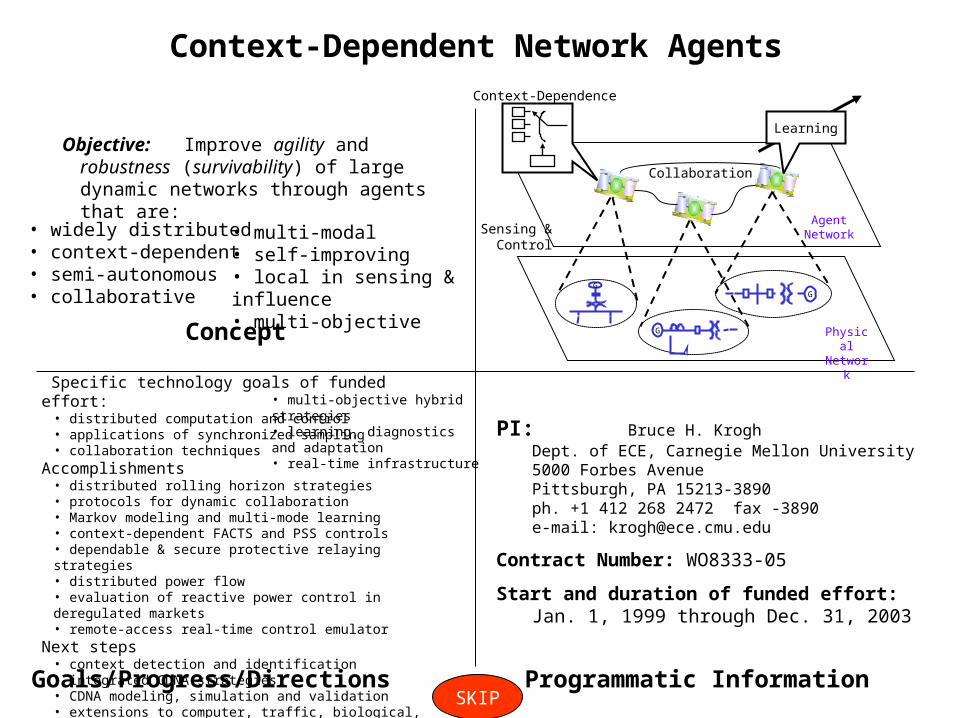
Context-Dependent Network Agents
Specific technology goals of funded effort:• distributed computation and control • applications of synchronized sampling• collaboration techniques
Accomplishments• distributed rolling horizon strategies• protocols for dynamic collaboration• Markov modeling and multi-mode learning • context-dependent FACTS and PSS controls• dependable & secure protective relaying strategies• distributed power flow • evaluation of reactive power control in deregulated markets• remote-access real-time control emulator
Next steps• context detection and identification• integrated CDNA strategies• CDNA modeling, simulation and validation• extensions to computer, traffic, biological, and C2 networks
Goals/Progress/Directions
Concept
Programmatic Information
PI: Bruce H. KroghDept. of ECE, Carnegie Mellon University5000 Forbes AvenuePittsburgh, PA 15213-3890ph. +1 412 268 2472 fax -3890e-mail: [email protected]
Contract Number: WO8333-05
Start and duration of funded effort: Jan. 1, 1999 through Dec. 31, 2003
Objective: Improve agility and robustness (survivability) of large dynamic networks through agents that are:
• widely distributed• context-dependent• semi-autonomous• collaborative
• multi-modal• self-improving• local in sensing & influence• multi-objective
Physical Network
G
G
G
Agent Network
Context-Dependence
Collaboration
Sensing &Control
Learning
• multi-objective hybrid strategies• learning, diagnostics and adaptation• real-time infrastructure
SKIP

CDNA: Progress by Subtask
Task 1: Agent Templates and Modules Subtask 1.1: CDN Agent Template
Implemented and studied structures for realizing various agent behaviors and capabilities for specific network control scenarios (CMU, RPI, TAMU, UM)
Subtask 1.2: Module SpecificationsCreated initial design of control agent modules separated from power system simulation program for real-time system emulation (RPI, UIUC)
Subtask 1.3: Interface Design Designed and implemented input-output interfaces between MATLAB power system simulator and real-time system emulator (RPI, UIUC)
Subtask 1.4: Tools for CDN Agent ConstructionEvaluated various algorithmic tools for constructing agent capabilities (CMU, RPI, TAMU, UM)
Task 2: Restructured Power System ModelingSubtask 2.1: Definition of Operating Modes
Examples of operating modes for TCSC control for voltage and stability transients (RPI, TAMU)Use of Markov decision models for defining operating modes (CMU)New method for evaluating safe transient-stability operating regimes (CMU)

Subtask 2.2: Online Identification of Operating ModesAnalysis of data from phasor measurement units (PMU) to identify signatures of disturbances (RPI)Use of neural nets and synchronized sampling for improved dependability/security (TAMU)
Subtask 2.3: Decomposition and AggregationConvergence results for new distributed load flow computations (UM)
Task 3: Agent Coordination and Learning Subtask 3.1: Development of Collaboration Strategies
New system structures for distributed model predictive control (CMU)Neighbor-coordination schemes in C-Nets (collaborative networks) (CMU)
Subtask 3.2: Learning Algorithms for CoordinationGame-theoretic formulations and learning for multi-agent control (CMU)Multi-objective coordination (TAMU)
Subtask 3.3: Local Control StrategiesMultimode control of Markov decision processes (CMU)Congestion control strategies for voltage and stability transients (RPI, TAMU)Impacts of deregulation market on reactive control (TAMU)
Subtask 3.4: Robust Hybrid DynamicsConditions for certainty equivalents in switching control strategies for Markov decision processes (CMU)
CDNA: Progress by Subtask (cont'd.)

Task 4: Real Time InfrastructureSubtask 4.1: Real-time Environment
Completed demonstration system (Telelab) for remote access to the Simplex infrastructure and MATLAB Power System Toolbox (RPI, UIUC)
Subtask 4.2: Robustness FeaturesImplemented Telelab for multiple users to download and test code (UIUC)
Task 5: Tests and DemonstrationsSubtask 5.1: Demonstration Scenarios
Multi-area scenarios for TCSC voltage and transient stability (RPI, TAMU)Scenarios for distributed multi-agent model predictive control (CMU)Multi-area load flow computation scenario (UM)
Subtask 5.2: Application SimulatorMATLAB Power System Toolbox-Simplex Telelab (RPI, UIUC)
Subtask 5.3: Visualization ToolsEvaluated power system simulation tools for protective relaying scenario presentation (MATLAB and EUROSTAG) (TAMU)
Task 6: The Virtual InstituteSubtask 6.1: Customization of Lire
Upgraded LIRE for faster access and e-mail notification services (CMU)Subtask 6.2: Computer-Based Collaboration
Web-based distribution of project reports and results (All participants)
CDNA: Progress by Subtask (cont'd.)

Overview of CDNA Accomplishments
Physical Network
G
G
G
Agent Network
- collaboration techniques- distributed computation
distributed control applications of synchronized sampling
multi-objectivehybrid strategies
real-time infrastructure
- learning- diagnostics- adaptation

Specific CDNA Accomplishments
B
C
A
distributed- rolling horizon strategies- power flow
protocols for dynamic
collaboration
- Markov modeling- multi-mode learning
context-dependentFACTS controls
context-dependentPSS controls
dependable & secureprotective relaying strategies
remote-access real-timecontrol emulator
evaluation of reactive power control in deregulated markets

CDNA Universities and Principal Investigators

Current CDNA Collaborations
1. U of Minn
3. TAMU
2. CMU
4. RPI
5. UIUCagents arch.
& collaboration
ABC systemswitching controlimplementation
Telelab-MATLABreal-time emulator
ABC systemvoltage studies
synchronous data modeling
economic marketsdecentralized comp.biological networks
distributedpower flow
stabilityregion comp.

Selected Results

Transmission System Security Analysis using Network Agents
• Security analysis is done by running power flows
• We are seeking methods of solving distributed power flows using agents (computer systems) in multiple control systems
• We would like to eliminate the idea of a “security center” approach.
University of Minnesota

ISO• Trends
– Getting larger
– Standard data formats
– Less functionality in regional systems
A
C
B
D
E
LARGE AREACONTROL SYSTEM
REGION ACONTROLSYSTEM
REGION CCONTROLSYSTEM
REGION BCONTROLSYSTEM REGION D
CONTROLSYSTEM
REGION ECONTROLSYSTEM

Networked Control Systems– Region can be any size– Can extend to any
number of regions– Regions retain original
functionality– Aggregate has same
functionality as large area control system
A
REGION ACONTROLSYSTEM
CREGION CCONTROLSYSTEM
B
REGION BCONTROLSYSTEM
DREGION DCONTROLSYSTEM
E
REGION ECONTROLSYSTEM

Poor Results from Multiple Processors solving One Power Flow
• Divide power system into several areas• Solve each area on a separate processor• Communicate results of each processor with
other processors• Communication time is greater than time
saved by using multiple processors• Try to minimize data that must be sent
between processors
University of Minnesota

Security Analysis and multiple processors
• Security analysis requires solving multiple power flows, one for each contingency case
• When calculation on one case is completed, start communication
• While communication is being done, start calculation on next case
University of Minnesota

PowerFlow
Area 3
PowerFlow
Area 1
PowerFlow
Area 2
Processor 1
Processor 2
Processor 3
Time
PowerFlow
Area 4
Processor 4
Multiple processors solving multiple outage cases – calculation overlaps communications
Greatly increased speed University of Minnesota

Methods Tested
• Gauss-Seidel Method
– Filtered Solution
– Block Border Gauss Method
• Conjugate Gradient Methods
• Reduced Orthogonal Subspaces
• Diakoptics
University of Minnesota

Results of research at the University of Minnesota
• Communication is the bottleneck• Methods with only neighbor to neighbor
communications require too many iterations to solve
• Methods that exchange ‘sensitivities’ require fewer iterations Some entity must calculate the sensitivities
• We have reduced the sensitivity data that must be exchanged to a minimum without sacrificing speed
University of Minnesotareturn
COORDINATION OF DISTRIBUTED, AUTONOMOUS AGENTS
Sarosh Talukdar, Eduardo Camponogara, Haoyu Zhou
ACCOMPLISHMENTS• Extension of Model Predictive Control (the Rolling Horizon Strategy) to serve as a coordination framework for autonomous, distributed agents.
• Development of a test-bed for coordination and learning strategies in networks of stationary and mobile, autonomous, distributed agents
Carnegie Mellon University

EXTENSION OF MODEL PREDICTIVE CONTROL TO AUTONOMOUS, DISTRIBUTED AGENTS
• The communication links between agents define a set of overlapping neighborhoods.
Neighbors of an agent = adjacent agents
• For each agent, the system’s variables are divided into three sets:X: proximate variables (those variables the agent can sense or control)Y: neighborhood variables (those variables the agent’s neighbors can sense or control)Z: remote variables (all other variables)
Carnegie Mellon University

SUFFICIENT CONDITIONS (for the successfull extension of modelpredictive control to distributed, autonomous agents)
If: • the overall-system-problem is feasible• the overall-system-problem is convex• the overall-system-problem is decomposed into sub-problems for the agents, such that each sub-problem matches its agent exactly (Z is empty for each agent)• each agent uses an iterative, interior point method to solve its sub-problem• each agent communicates the results of each iteration to its neighbors• the agents in each neighborhood work serially (one after the other)
Then: the agents’ iterations will converge to an optimal solution of the overall-system-problem
Question: are these conditions necessary?
Carnegie Mellon University

COORDINATION HEURISTICS
There are at least two families of heuristics by which the conditionson:
• exact matchings of agents to sub-problems• problem-convexity• communication frequency within each neighborhood• serial work within each neighborhood
can be demonstrated to be unnecessary for representative networks.
These families are based on:1. tightening the resource constraints by the inclusion of “resource margins”2. learning models by which each agent can predict the actions of its neighbors
These heuristics allow the agents to work asynchronously (in parallel, each at its own speed) on realistic (non-convex) control tasks.
Carnegie Mellon University

Collaborative Nets
Dynamic Control Problem
(DP) Min f(x,dx/dt,u,t)
s.t. h(x,dx/dt,u,t)=0 g(x,dx/dt,u,t)0
Rolling Horizon Formulation
Series of Static OptimizationProblems <(P)>
(P) Min f(X,U)
s.t. H(X,U) = 0
G(X,U) 0(P)
(P1)
C-Net
(P3)(P2)
Ag1 Solution Approach to <(P)>
1) Break (P) into {(Pm)}
2) Match Agents to {(Pm)}
3) Assemble C-Net
Carnegie Mellon University

Experiments
A Heuristic: Constraint Margins
When is the C-Net
Context-Dependent?
The agents modify the tasks, {(Pm)},
to make up for the varying context
C-Net Penalty (%)
Number of Pendulums
APE with mutual help
Pendulums are randomly
disturbed
Agents adjust {(m)}
Asynchronous prox . exch.
(Pm): Gm(Xm,Um,Ym)-m
1) Implement Constraint Margins
2) Collaboration Protocols:
3) Context Dependency
APE
APE M-Help
Carnegie Mellon University

Context Dependent Switching and Learning
• Contexts: different buyers and sellers (decision-makers) with the same
• Objective: to develop bidding strategies for their own profits.
• So many uncertainties for a decision-maker, G1, for example,– Unobservable infinitely many possible combinations of bidding from
G2, L1, L2.
– Transmission line capacity variations.
G1
L1
Zone 1
G2
L2
Zone 2
Transmission Line
An application in the deregulated power market
Carnegie Mellon University

• Switching: – Using finite number of modes to describe the
infinitely many possibilities.– Designing optimal strategy for each mode and
switching between these optimal strategies.
• Learning:– Performance measurement for the switching
among the current set of strategies.– When the performance is not satisfactory, a
new mode will be identified and corresponding optimal strategy will be designed.
Carnegie Mellon University

Multi-Mode Markov Decision Process Model
• Markov System Xk, k = 0, 1, …, state space S.
• System Mode k, k = 0, 1, …, = {1, 2, …, ||}.
• Action set U and action subset U(s) U for each sS.
• A (stationary) policy L is a mapping from S to U such that L(s) U(s) for each sS.
• At epoch k, after an action u U(Xk) is applied,
– Transition to s with probability
– Reward incurred
– Mode jumps to k+1.
• Objective: find optimal policy sequence L0, L1, … to maximize performance
).,( sXp ku
k
).,( uXf kk
. ),( kkk LXfE
k
Carnegie Mellon University

Switching Based on Certainty Equivalence (CE)
• Let L* be the optimal policy when k is a constant
.• Suppose k is a Markov process with transition matrix
Q.• CE Switching Strategy: Apply L
* when k=.• When is the CE strategy optimal?
|| I - Q || (1 - ) B /(2 A), A and B computable
• How well does CE switching do in general?||JCE - J*|| 2 A ||I - Q|| / (1 - )2
JCE: performance under CE switchingJ*: optimal performance.
. *
kLLk
Carnegie Mellon University

• CE switching: Use the MLE of k
• When is CE switching optimal?2(1 - max p()) (1 - ) B /(2 A)
• How well does CE switching do?||JCE - J*|| 4A(1- maxp()) / (1 - )2
JCE: performance under CE switching
J*: optimal performance.
CE Strategy for Unobservable Modes
Carnegie Mellon University

Simple Example
• Stationary policies for each mode:– If G2 always bids $14, $19 and $25, G1 bids $10, $15 and $20.
• Case 1: – G2 bids randomly with prob. 0.2, 0.2, 0.8
– G1’s optimal bidding strategy: Always bid $20 - CE strategy!
• Case 2:– G2 bids randomly with prob. 0.3, 0.3, 0.4
– G1’s optimal bidding strategy: Always bid $15 - not a CE strategy!
G1
LG2
G2 Capacity: 1000MWG2’s possible bids:$14, $19, $25/MW
G1 Capacity: 500MWG2’s possible bids:$10, $15, $20/MW
3 possible load demand levels:500MW, 800MW, 1200MWwith probabilities 0.3, 0.4, 0.3
Interest rate: 0.1% = 1/(1+0.1%)
Carnegie Mellon University
return

Research at TAMU: Objectives
Survivability and Protection of the system for• Transient voltage, angle, oscillation, long term voltage
stability crises.• Overflow problems.• Protective relayingResponsibility evaluations of• Loop flow Problems.Market Efficiency for• Generation Dispatch Problems.All the problems are coupled, objectives are sometimesconflicting.
Texas A&M University

CDNA Interpretations• Detection agents to detect transient angle stability, voltage
stability, oscillation, long term voltage crises using acceleration angle velocity, line flows, voltage profiles, etc. (Security Margin Monitoring)
• Stabilizing agents, congestion control agents, auction agents, protection agents, performance control agents (to compromise different objectives.)
• Need to know contexts to switch among agents for survivability, protection and market efficiency.
• CDNA activates the needed control for best performance.
Texas A&M University

Accomplishments • Transient angle stabilizing controls using TCSC, SMES,
SVC, Braking resistors.• Stabilizing controls for transient voltage stability using
TCSC.• Generation dispatch using auction agents. • Flow Decompositions of bilateral trades for responsibility
evaluations.• Demonstrate interactions between market policies and
reactive power controls: Stable financial systems imposed on a stable engineering system may cause overall instability. Bad incentives and misconceptions.
Texas A&M University
SKIP

Work to be done in 2000
• Detection Agents for Transient voltage, angle, long term voltage stability crises.
• Security Margin Monitoring for long term and short voltage problems.
• Responsibility evaluations of loop flows using Flow Decompositions.
• Congestion controls using FACTs.• Demonstrate the use of Protection Relays as
Structural Controls to avoid cascading failures..
Texas A&M University

Some Highlights• Key misconception on reactive power controls are
identified.• We demonstrate using a simple BPA system why
these concepts are wrong.• Six questions are clarified using simulations.• Pricing based on these wrong concepts may lead
to system instability. • Financial incentives should be based on solid
engineering foundations.
Texas A&M University

Q1: Is Voltage Control Effect of Generators Local by nature? What are the impacts on reducing the Var reserve?
• No. It is system-wide. And reduced Var reserve will have system-wide impact.• Reduced reserve will also cause voltage transient stability, which collapsed in seconds.
Q2: How ULTC affects Voltage Stability?
• In many cases they harm the security.
Texas A&M University

• No, definitely not.
Q3: Can Intensive Use of Smart Shunt Banks at Load Areas Replace Dynamic VAR Reserves of Generators?
Q4: What is the impact of Real Loads on Voltage Stability?
• They have substantial impacts.
Texas A&M University

Q5: How do Load Characteristics Impact on Security Margin?
• They have substantial impact.
Q6: Will a stable financial system imposed on a stable engineering system destabilize
the whole system?
• Yes, definitely. Wrong incentives and misconception of reactive power system can destabilize the whole system.
• Interactions between financial system and engineering systems need to be investigated.
Texas A&M University

Conclusions• Not all VARs are created equal.
• Misconceptions on voltage stability are demonstrated.
• New findings will enable us to accurately evaluate reactive power provisions from generators and other devices in a deregulated power market, such as power pool market, bilateral trade market or compatible market.
Texas A&M University

Identified needs:
• Reduce dependency on setting inaccuracy
• Improve selectivity between permanent and temporary faults
• Improve security/dependability
• Introduce Coordination between Control and Protection
Protective Relaying
Texas A&M University

Protective Relaying
Defined New Protective Relaying Agents: • #1 Neural Net (NN) Algorithm for Fault
detection and classification• #2 Synchronized Sampling (SS) algorithm
for fault location• #3 Coordination Between NN and SS• #4 Coordination Between NN, SS and
Control
Texas A&M University

Protective Relaying
Developed Context Dependent Approach:
• Learning (training) for NN Agents
• Line Model (on-line parameter estimation) for Synchronized Sampling Agents
Texas A&M University

Protective Relaying
Introduced New Performance Benefits:
• Better relaying (dependability/security)
• Better reclosing (recognition of permanent vs temporary faults)
• Better control (preventing cascading outages)
Texas A&M University

Protective Relaying
Introduced New Evaluation Approach:
• Definition of future use of modeling and simulation tools (local and system events)
• Use of Matlab customized software for evaluation of individual protective relaying agents
• Use of Eurostag software for evaluation of system-wide interaction among agents
Texas A&M University
return

Real-Time System Emulation
• Based on inputs from UIUC, developed a preliminary power system simulator with external control from a remote computer
• Simulator is MATLAB based; communication protocol is SOCKET
• Demonstrated with the ABC system; external control switch between several control options
Rensselaer Polytechnic Institute

Power System Dynamic Monitoring
• Worked with ISO-NE, NYISO, and NYPA to obtain monitored power system disturbance transient data from about a dozen Dynamic Recording Devices (from several vendors)
• Developed a rule-based Event Identifier for classifying system disturbances; next step will be the development of an advanced identifier using detection filters
• In the process of using data obtained from several different monitors for the same event to analyze interarea oscillations
Rensselaer Polytechnic Institute

Control Design
• Proposed alternative controller structure using remote measurements as feedback signals
• Controller structure to handle communication delay
• Further development of linear matrix inequality techniques to control systems with parametric dependence
Rensselaer Polytechnic Institute

Scenarios
• Introduce two contingency scenarios for the ABC system, in addition to the normal operating condition, and design controls for the contingencies; will continue to develop additional scenarios for the system
Rensselaer Polytechnic Institute
return

Real Time Infrastructure• How to support the deployment of control agents in real
time reliably without shutting down the normal operations is an important concern.
• Telelab integrates WWW service with a fault tolerant dynamic real time architecture, the Simplex architecture. Telelab architecture gives you the ability – to add or replace application software components on the fly
without shutting down its operation. – to protect the system operation and the integrity of equipment
from bugs that could be introduced by changes.
University of Illinois at Urbana Champaign

Telelab: Remote Lab Interface
Win98/NT
* important* important* important* important* important* important* important* important
Win98/NT
* important* important* important* important* important* important* important* important
Win98/NT
* important* important* important* important* important* important* important* important
Win98/NT
* important* important* important* important* important* important* important* important
LynxOS
Simplex
annotated, pre-recordedpresentation (e.g. HTML) (in case of communication failures)
CORBA A/V Streams
CORBAA/V Streams
Demo available at www-drii.cs.uiuc.edu
University of Illinois at Urbana Champaign
SKIP

Next Step: A Sample Power Network
GG
G
G
G
GLoad
loadload
load
load
Circuit Breaker
University of Illinois at Urbana Champaign

“Sympathetic” Relay Tripping: A Model Problem
– Background: Short circuit and temporary overload are very different. But they are treated as if they are the same problem due to the lack of coordination. Local response could lead to cascading failures that bring down a large portion of network.
– Coordination Context: • Triggering event: a relay open followed by neighboring relay open
• Event network: SS sample locate the fault, inform overload relays to hold and related nodes to do power rerouting/load shedding
• Data network: continue monitoring and report the overload situation on the relays in the holding mode
• Control network: agents change from normal control to overload management to bring the relays from holding mode to normal mode
University of Illinois at Urbana Champaign

“Sympathetic” Relay Tripping: Model Problem - cont’d
•For each chain of events there should be a coordinated response.
•Value of information: for each fault event there can be two solutions. The CDNA solution using information or throwing resources at it. This allows us to compute the resource equivalence of CDNA.
•Research on cascaded failures (network system instability): do we have parallels in Internet or other forms of network reactions, where a coordinated response could have prevented cascading failures. Will any ideas in Internet congestion control useful for power networks?
University of Illinois at Urbana Champaign

A Sample Power Network Failure
G3G4
G6
G5
G2
G1Load
loadload
load
load
Circuit Breaker
overload
• G1 or G2 could become unstable unless controllers are switched
• The open of the overload lines could propagate the failure to the entire region
• We need to stabilize G1 and G2 controllers and re-adjust G3,4,5, 6 and normalize the overloaded lines quickly
University of Illinois at Urbana Champaign

CDNA Simulation – Contingency management and agent based control testing
cases to implement agent and context management.
• Getting RPI’s sample system implemented.
• Getting CMU’s agent sample system implemented.
G1, 2 (MATLAB)
Agents for
G1, 2 (Simplex)
G3, 4,5, 6 Network
Agents for Load
Management Shared contexts
Telnet Net Back Door
TeleLab inteface
TeleLab interface
Agents
G3,4,5,6
University of Illinois at Urbana Champaign
return