contribution à l etude de la commande dune machine...
TRANSCRIPT

الجمهورية الجزائرية الديمقراطية الشعبية
وزارة التعليم العالي والبحث العلمي
Université Badji Mokhtar-Annaba جامعة باجي مختار عنابة
Badji Mokhtar Annaba University Année 2017
Faculté des Sciences de l'Ingéniorat
Département d'Electrotechnique
THEME
Thèse
Présentée pour l’obtention du diplôme de Doctorat en Sciences
Option
Commande Electrique
Par
KHAMMAR Fatma
Directeur de Thèse : Pr. DEBBACHE Nasr Eddine Univ. Badji Mokhtar- Annaba
Devant le Jury composé de :
Président : Pr. BAHI Tahar Univ. Badji Mokhtar-Annaba
Examinateurs : Pr. BETKA Achour Univ. Biskra
Pr. MOUSSAOUI Abdelkrim Univ. Guelma
Dr. SOUFI Youcef Univ. Tébessa
Dr. ARBAOUI Fayçal Univ. Annaba
Contribution à l’Etude de la Commande d’une Machine
Asynchrone : Approches Intelligentes

Remerciements
Remerciements
Mes remerciements vont tout premièrement à Dieu le tout puissant de m'avoir donné
courage et patience durant toutes ces années de préparation.
J’exprime mes remerciements sincères et ma profonde reconnaissance à
Monsieur Pr. DEBBACHE Nasr Eddine pour son aide, ses conseils précieux et ses
encouragements incessants durant la réalisation de cette thèse.
Je tiens aussi à exprimer ma profonde gratitude à Monsieur BAHI Tahar
Professeur à l’Université d’Annaba, d’avoir accepté de juger mon travail et de
présider le jury de soutenance de cette thèse.
Mes vifs remerciements vont également aux membres de jury de soutenance composé de
Messieurs : BETKA Achour Professeur à l’Université de Biskra, MOUSSAOUI
Abdelkrim Professeur à l’Université de Guelma, SOUFI Youcef Maitre de Conférence à
l’ Université de Tébessa, ainsi que ARBAOUI Fayçal Maitre de Conférence à l’ Université
d’Annaba , qui me font l’ honneur d'examiner ce travail.
Enfin, un remerciement particulier à mes parents, à mon époux, à ma sœur, à mes frères et
mes enfants.

Résumé
I
Résumé :
La machine asynchrone est très utilisée dans les applications industrielles à cause de
sa conception, sa robustesse et son coût qui est relativement faible par rapport aux autres
machines. Pour obtenir une machine avec des performances semblables à la machine à
courant continu, la commande vectorielle par orientation du flux est appliquée. Au moyen
de l’étude de sensibilité, le régulateur classique PI appliqué à la commande de vitesse
de la machine avec une simulation sous Matlab/Simulink a démontré que ce dernier ne donne
pas une bonne robustesse. Pour remédier ce problème, on a remplacé ce régulateur par
d’autres régulateurs basés sur les techniques de l’intelligence artificielle tels que les
régulateurs flous, neuronaux et neuro-floue. Des tests de simulation numérique ont été
réalisés pour valider la faisabilité de toutes les technique utilisées .Une étude comparative a
démontré que le contrôleur Neuro-flou a permis d’améliorer les performances dynamiques
ainsi que la robustesse vis-à-vis de la perturbation extérieure et de la variation paramétrique.
Mots clés:
Machine asynchrone - Commande vectorielle à flux orienté- Réseau neuronal- Logique floue-
ANFIS.
Abstract:
The asynchronous machine is very used in the industrial applications because of its
conception (design), its robustness and its cost which is relatively low(weak) compared to the
other machines. To obtain a machine with performances similar to the direct current machine,
the vector control by Orientation of the flux is applied. By means of the study of sensibility,
classical regulator PI applied to the speed control of the machine with a simulation in
Matlab/Simulink demonstrated that the latter does not give a good robustness. To remedy this
problem we replaced this regulator by other regulator based on the techniques of the artificial
intelligence such as the fuzzy regulator, neuronal regulator and neuro-fuzzy regulator.
Simulation tests, were realized to validate the feasibility of all techniques used reinforced by
a comparative study which show that the Neuro-Fuzzy controller has improved dynamic
performance as well as the robustness with respect to the external disturbance and of the
parametric variation.
Key words:
Asynchronous machine-Orientation field control-Neuronal network-Fuzzy logic-ANFIS.
ملخص
المحرك الغير متزامن يستخدم كثيرا في التطبيقات الصناعية بسبب تصميمه و صالبته و ثمنه المنخفض مقارنة بالمحركات
ات تيار مستمر طبقنا التحكم الشعاعي عن طريق التوجيه ذات أداء مماثل للمحرك ذاألخرى . للحصول على محرك
ا باستخدام محاكاة ذدل كالسيكي )بي اي( لتحكم في سرعة المحرك و هالتدفقي . بواسطة دراسة التحسس قمنا بتطبيق مع
ا المعدل ذا المشكل قمنا بتعويض هذا األخير وضح بان المنظم الكالسيكي ال يعطي صالبة جيدة . لعالج هذما تالب ه
العصبي. تجارب العصبية و الغامضالشبكات كاء االصطناعي مثال المنطق الغامض, ذبمعدل أخر يعتمد على تقنية ال
كورة مدعومة بدراسة مقارنة التي بينت أن التحكم العصبي ذانجزت بالمحاكاة الرقمية للتحقق من صحة التقنيات الم
للك الصالبة أثناء االضطرابات الخارجية و تغيير قيم المعامالت.ذالغامض يستطيع تحسين األداء الديناميكي ك
كلمات مفتاحية
.الشبكة العصبية الغامضة -المنطق الغامض -الشبكة العصبية-التحكم الشعاعي بالتدفق الموجه -زامن محرك كهربائي غير مت


Table des Matières
II
Table des Matières
Remerciements
Résumé
Liste des notations et symboles
Liste des tables
Liste des figures
Introduction Générale…………………………………………………………………………1
Chapitre I
Contrôle de la Machine Asynchrone et Robustesse
I.1. Introduction…………………………………………………………………......………….4
I.2. Commande Vectorielle des Machines Asynchrones……….……………………..………5
I.2.1. Contrôle vectoriel direct …………………………………………………...……5
I.2.2. Contrôle vectoriel indirect ………………………………………………………6
I.2.3. Comparaison entre les méthodes directe et indirecte ……………………………8
I.3. Techniques Avancées de Commande des Machines Asynchrones……………………..…9
I.3.1. Techniques avancées de commande ……………………………………..…….10
I.4. Conclusion…………………………………………………………………………….….12
Chapitre II
Les Techniques de Commande Avancées
II.1. Introduction…………………………………..………………………………………….13
II.2. Les neurones Formels……………………………………………………………...…….13
II.2.1. Réseaux de neurones (RN) ……………………………………...…………….14
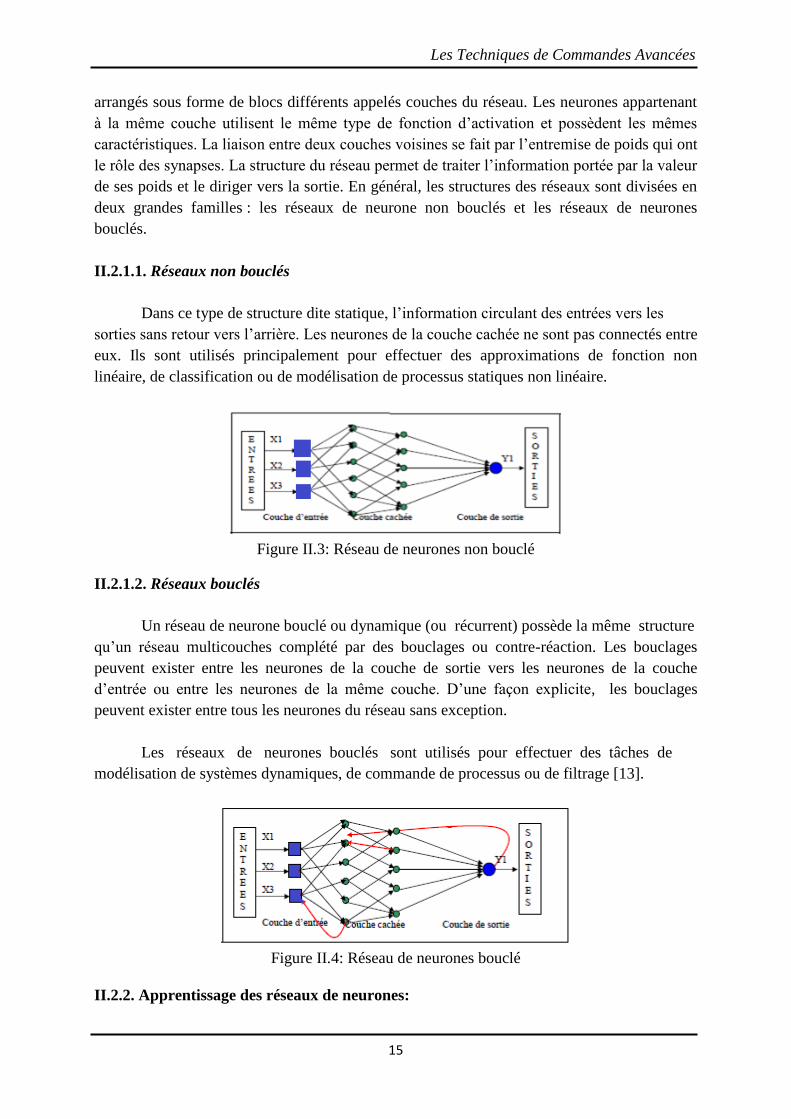
II.2.1.1. Réseaux non bouclés…………………………………………………15
II.2.1.2. Réseaux bouclés……………………………………………...………15
II.2.2. Apprentissage des réseaux de neurones………………….………….…………15
II.2.3. Algorithme de rétropropagation du gradient ……………………………….…16
II.2.4. Approximation de fonctions et prédiction par RN………………………….. 17
II.2.5. Identification par réseaux de neurones……………………………………...…18
II.2.6. Commande de processus………………… …………………………………...19
II.2.6.1. Système de commande non adaptatif ………………………………..19
II.2.6.2. Système de commande adaptatif ……………………………………21
II.2.7. Problèmes de commande par RN ……………….…………………….....…….21
II.3. La Logique Floue………………………………………………………………………..21
II.3.1. Introduction à la logique floue…………………………………………………21
II.3.2. La régulation floue……………………………………………………………..21
II.3.3. Ensembles flous………………………………………………………………..22
II.3.4. Variables linguistiques………………………………………………………...22
II.3.5. Différentes formes pour les fonctions d'appartenance………….………….…..23 II.3.6. Commande par logique floue……………………………………………….…24
II.3.7. Structure d’un contrôleur flou…………………………………………………24
II.3.8. Fuzzification ……………………………………………………………….…25
II.3.9. Inference (Composition des règles) ………………………………………...…26
Table des Matières
III
II.3.10. Différentes méthodes d’inférences floues………………………………...…28
II.3.10.1. Système d’inférence floue de type Mamdani……………………....28
II.3.10.2. Système d’inférence flou de type Takagi-Sugeno……………….…29
II.3.11. Défuzzification………………………………………………………………30
II.3.12. Conception d'un régulateur flou……….…….…………………………….. ..31
II.3.13. Avantages et inconvénients de la logique floue et des réseaux de neurones…32
II.4. Les Systèmes Neuro-Flous………………………………………………………………33
II.4.1. Les réseaux neuro-flous……………………………………………………..…34
II.4.2. Méthodes et combinaisons neuro-floues……...…………………………….…34
II.4.3. Systèmes neuro-flous hybrides……………………………………………...…35
II.4.4. Système ANFIS (Adaptative Network Fuzzy Inference System) ………….…38
II.4.5. Algorithme d'apprentissage…………………………………………………....40
II.4.6. Avantages des techniques hybrides………………………………………........42
II.5. Conclusion……………………………………………………………………………….42
Chapitre III
Modélisation et Commande Vectorielle de la Machine Asynchrone
III.1. Introduction……………………………………………………………………….…….43
III.2. Modélisation Electrique de La Machine Asynchrone……………….………………….43
III.2.1. Hypothèses ………….…………………………………………..……………43
III.2.2. Description paramétrique de la machine asynchrone triphasée....……………44
III.2.3. Mise en équation de la machine asynchrone dans le repère triphasé ……...…45
III.2.4. Modélisation de la machine asynchrone dans le repère biphasé de PARK ….46
III.2.4.1. Transformation de Park…………………………………….………46
III.2.4.2. Transformation de Concordia………………………………………48
III.2.4.3. Lien entre Park et Concordia…………………………….…………48
III.2.4.4. Choix de référentiel…………………………………………………48
III.2.5. Modèle de la machine asynchrone alimentée en tension….………….………49
III.2.6. Représentation d’état du système………………………………………….….51
III.2.7. Modèle de la machine asynchrone dans le repère (α, β)……...…..……......…52
III.3. Alimentation de la Machine Asynchrone ……………………………………………....52
II.3.1.Introduction………………………………………………………….…………52
III.3.2.Modélisation de la commande à modulation de largeur d’impulsion ……… 55
III.4. Commande Vectorielle de la Machine Asynchrone…………………………………….56
III.4.1. Le Contrôle vectoriel …………………………………………...…………....57
III.4.2. La Commande vectorielle indirecte à flux rotorique orienté…………...........57
III.4.2.1. Mise en équation de la commande………………...……..…………57
III.4.2.2. Estimation de ωS et de θS………………………………..…………..58
III.4.3. Structure de la commande FOC ( Field Oriented Control ) ………….....…..59
III.4.3.1. Régulateur PI de vitesse………………………………………..…...61
III.4.3.2.Générateur du flux de référence ……………………………………62
III.4.3.3. Limiteur de couple…………………………………………...……...62
III.4.4. Résultats et interprétation ……………………………………….………..… 63

Table des Matières
IV
III.5. Conclusion…………………………………………………………………………...…73
Chapitre IV
Application des Techniques Avancées
IV.1. Introduction……………………………………………………………………...…...…74
IV.2. Application de RN à la Commande de la MAS……………………………………...…74
IV.2.1. Développement du contrôleur neuronal ……………………….…………..…74
IV.2.2. Résultats et interprétation………………………………………………..…....75
IV.3. Application de La Logique Floue à La Commande de La MAS…………………….…79
IV.3.1. Description du contrôleur …………………………………………………….79
IV.3.2. Résultats et interprétation………………………………………………….….82
IV.4. Synthèse d’un Contrôleur ANFIS pour la Régulation de Vitesse……………...………85
IV. 4.1. Description et structure du contrôleur ANFIS proposé………………..…….85
IV.4.2. Apprentissage du contrôleur "entraînement d’un réseau ANFIS "………...…85
IV.4.3. Résultats et interprétation………………………………………….………....86
IV.5. Etude Comparative…………………………………………………………………..…90
IV.6 .Conclusion……………………………………………………………………………...92
V. Conclusion Générale…………….……………...…………………………………..…….93
Annexe
Bibliographie

Liste des Symboles
Notations
Abréviations désignation
MAS Moteur Asynchrone
FOC Acronyme de Field oriented control
MLI Modulation par Largeur d’Impulsion
RN Réseau de neurones
ANFIS Adaptative Network Fuzzy Inference System
RLF Régulateur Logique Flou
Symboles
𝑅𝑠 Résistances statorique [ Ω]
𝑅𝑟 Résistances rotorique [ Ω]
𝑙𝑠 Inductances propres d’enroulements statorique [H].
𝑙𝑟 Inductances propres d’enroulements rotorique [H].
𝑚𝑠 Inductance mutuelle statorique [H].
𝑚𝑟 Inductance mutuelle rotorique [H].
𝑀𝑠𝑟 Inductance mutuelle entre le stator et rotor [H].
𝑀𝑟𝑠 Inductance mutuelle entre le rotor et stator [H
𝐾𝑓 Coefficient de frottement [N.s/rad].
𝐽 Moment d’inertie [kg.m2].
𝑃 Nombre de pair de pôle
d, q Axes direct et quadrature
𝛼, 𝛽 Axes alpha et beta
xd, xq Composantes de la grandeur x dans le repère (d, q).
𝑋𝛼, 𝑋𝛽 Composantes de la grandeur 𝑋 dans le repère (𝛼, 𝛽).
∅ Flux [Wb].
∅𝑟 Flux rotorique résultant, 𝜔𝑟𝑒𝑓 Vitesse de référence [rad/s].
𝜔𝑠 Pulsation électrique statorique [rad/s].
𝜔𝑟 Pulsation électrique rotorique [rad/s].
𝘊𝑒𝑚 Le couple électromagnétique délivré par le moteur.
𝘊𝑟 Couple mécanique résistant [N m]
θ La position réelle [r ad]
𝜃𝑠 La position statorique [r ad]
𝜎 Représente le coefficient de dispersion ou de Blondel
𝑇𝑟 La constante de temps rotorique, 𝐼𝑠𝑎 Le courant statorique
m Indice de modulation
r Taux de modulation

Liste des Symboles
VI
Ω Vitesse de rotation mécanique [rad/s]
P(θ) Matrice de Park normalisée
Ψqr Le flux rotorique coïncide avec l'axe q
Ψdr Le flux rotorique coïncide avec l'axe d
𝑉𝑟𝑒𝑓 Amplitude de référence
𝑉𝑃 Amplitude de porteuse
𝑓𝑃 Fréquence de la porteuse
𝑓 Fréquence de modulante
𝒱𝑠, 𝒱𝑟 Tension statorique et rotorique
𝑖𝑠𝑑, 𝑖𝑠𝑞 Courant statorique suivant le repère (d, q).
𝑖𝑟𝑑, 𝑖𝑟𝑞 Courant rotorique suivant le repère (d, q).
𝐶𝑒𝑚∗ Référence du couple électromagnétique
∅𝑟∗ Référence du flux rotorique
t Temps(s)
s Opérateur de Laplace (= 𝑑
𝑑𝑡)
ξ Facteur d’amortissement
𝚠𝑛 Pulsation propre du système non amorti
X Vecteur d'état
u Vecteur de commande
𝑮∆𝒖 Gain de dénormalisation
𝐺𝑒 , 𝐺∆𝑒 Gains de normalisation de l’erreur et de sa variation
𝑒(𝑘), ∆𝑒(𝑘) Erreur et la variation de l’erreur de vitesse
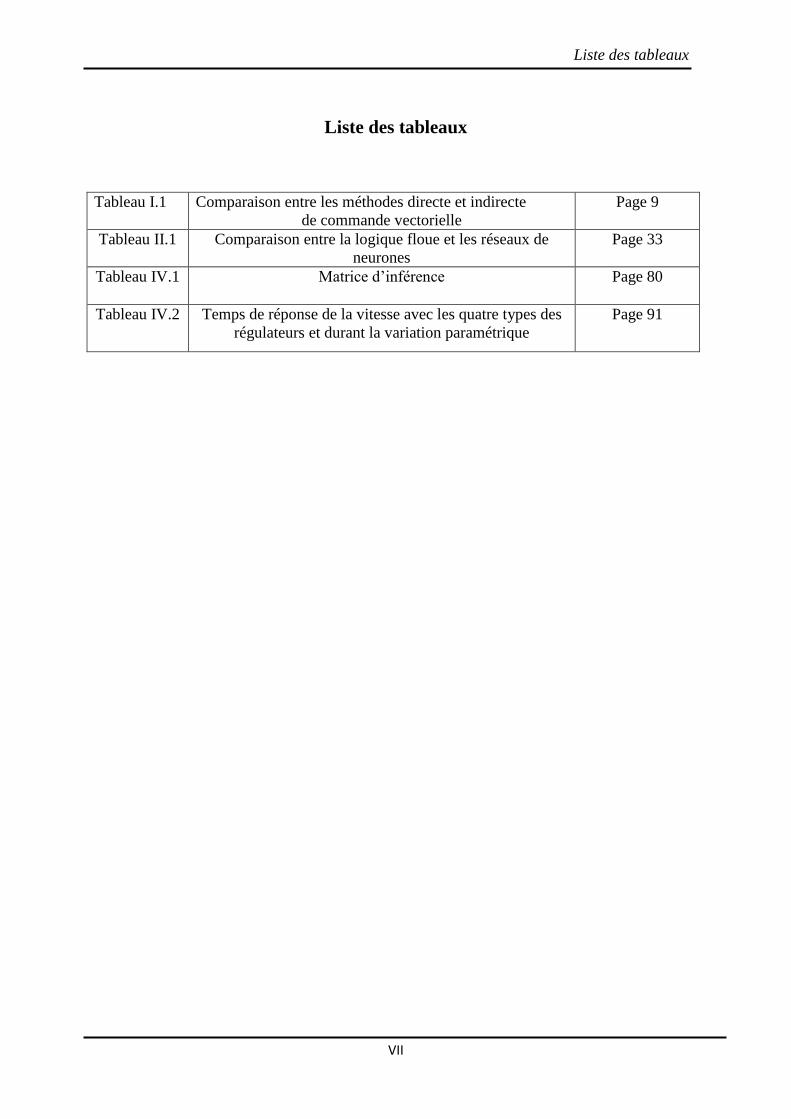
Liste des tableaux
VII
Liste des tableaux
Tableau I.1
Comparaison entre les méthodes directe et indirecte
de commande vectorielle
Page 9
Tableau II.1 Comparaison entre la logique floue et les réseaux de
neurones
Page 33
Tableau IV.1 Matrice d’inférence Page 80
Tableau IV.2 Temps de réponse de la vitesse avec les quatre types des
régulateurs et durant la variation paramétrique
Page 91
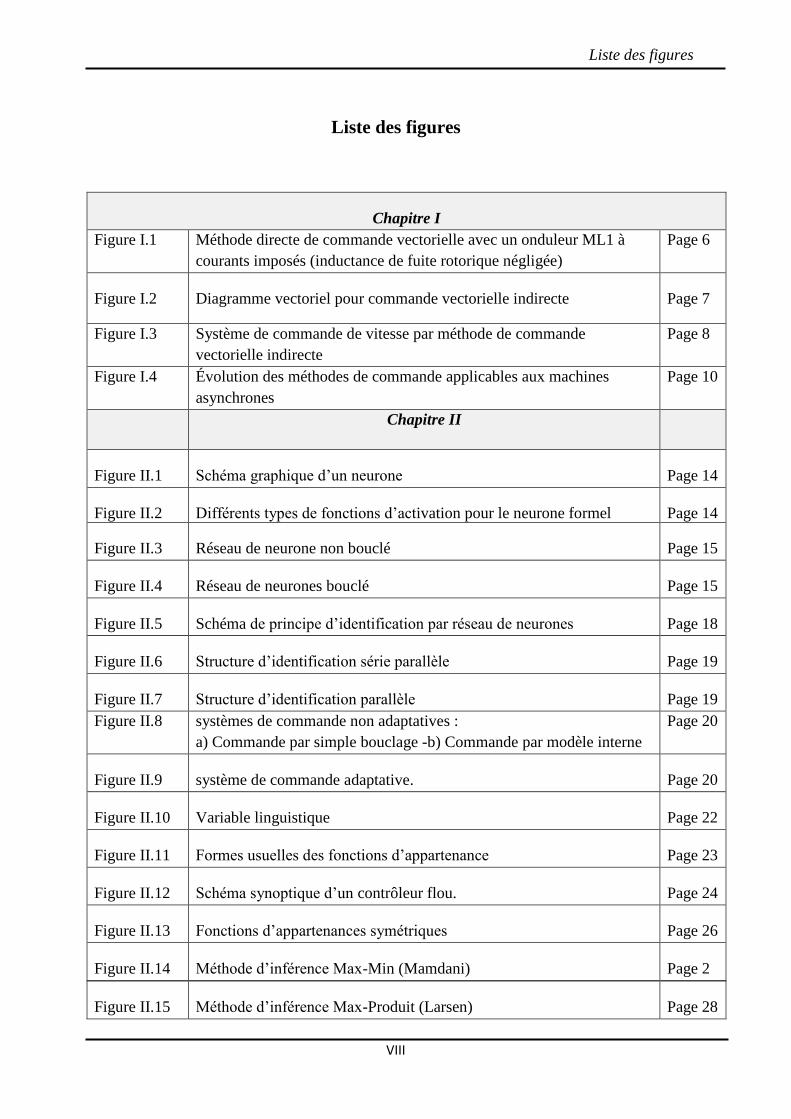
Liste des figures
VIII
Liste des figures
Chapitre I
Figure I.1 Méthode directe de commande vectorielle avec un onduleur ML1 à
courants imposés (inductance de fuite rotorique négligée)
Page 6
Figure I.2 Diagramme vectoriel pour commande vectorielle indirecte Page 7
Figure I.3 Système de commande de vitesse par méthode de commande
vectorielle indirecte
Page 8
Figure I.4 Évolution des méthodes de commande applicables aux machines
asynchrones
Page 10
Chapitre II
Figure II.1 Schéma graphique d’un neurone Page 14
Figure II.2 Différents types de fonctions d’activation pour le neurone formel Page 14
Figure II.3 Réseau de neurone non bouclé Page 15
Figure II.4 Réseau de neurones bouclé Page 15
Figure II.5 Schéma de principe d’identification par réseau de neurones Page 18
Figure II.6 Structure d’identification série parallèle Page 19
Figure II.7 Structure d’identification parallèle Page 19
Figure II.8 systèmes de commande non adaptatives :
a) Commande par simple bouclage -b) Commande par modèle interne
Page 20
Figure II.9 système de commande adaptative. Page 20
Figure II.10 Variable linguistique Page 22
Figure II.11 Formes usuelles des fonctions d’appartenance Page 23
Figure II.12 Schéma synoptique d’un contrôleur flou. Page 24
Figure II.13 Fonctions d’appartenances symétriques Page 26
Figure II.14 Méthode d’inférence Max-Min (Mamdani) Page 2
Figure II.15 Méthode d’inférence Max-Produit (Larsen) Page 28
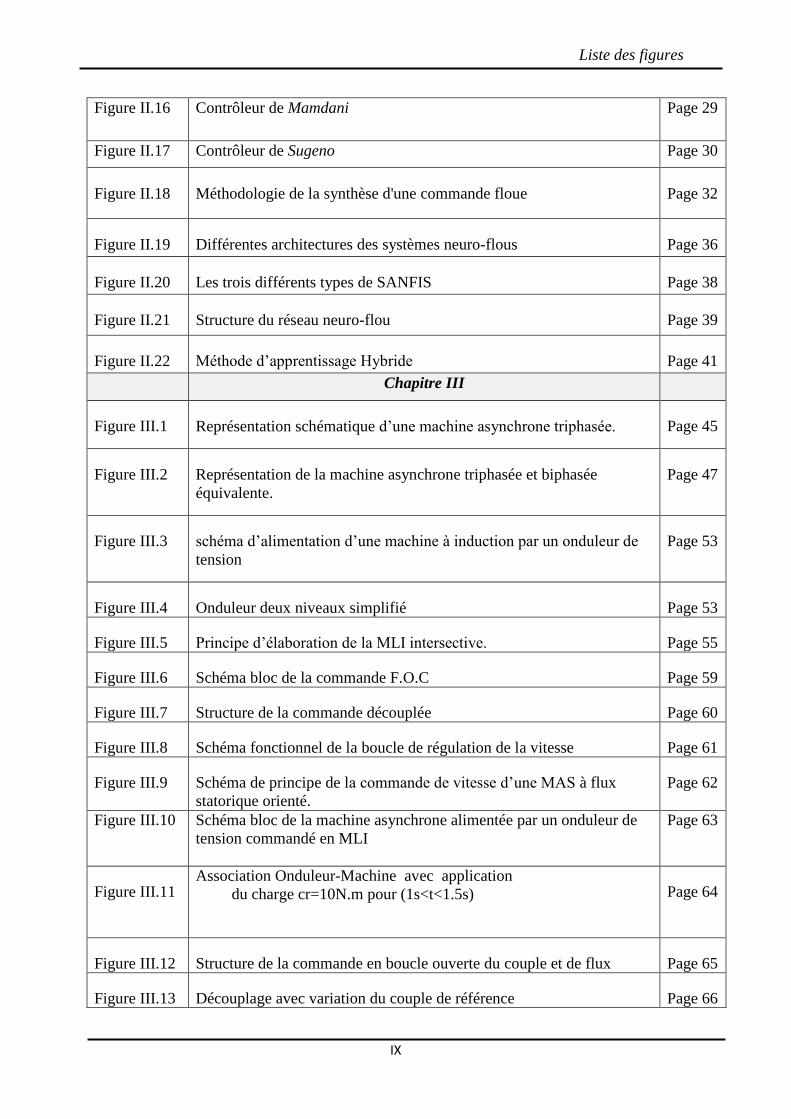
Liste des figures
IX
Figure II.16 Contrôleur de Mamdani
Page 29
Figure II.17 Contrôleur de Sugeno Page 30
Figure II.18 Méthodologie de la synthèse d'une commande floue Page 32
Figure II.19 Différentes architectures des systèmes neuro-flous Page 36
Figure II.20 Les trois différents types de SANFIS Page 38
Figure II.21 Structure du réseau neuro-flou Page 39
Figure II.22 Méthode d’apprentissage Hybride Page 41
Chapitre III
Figure III.1 Représentation schématique d’une machine asynchrone triphasée. Page 45
Figure III.2 Représentation de la machine asynchrone triphasée et biphasée
équivalente.
Page 47
Figure III.3 schéma d’alimentation d’une machine à induction par un onduleur de
tension
Page 53
Figure III.4 Onduleur deux niveaux simplifié Page 53
Figure III.5 Principe d’élaboration de la MLI intersective. Page 55
Figure III.6 Schéma bloc de la commande F.O.C Page 59
Figure III.7 Structure de la commande découplée Page 60
Figure III.8 Schéma fonctionnel de la boucle de régulation de la vitesse Page 61
Figure III.9 Schéma de principe de la commande de vitesse d’une MAS à flux
statorique orienté.
Page 62
Figure III.10 Schéma bloc de la machine asynchrone alimentée par un onduleur de
tension commandé en MLI
Page 63
Figure III.11 Association Onduleur-Machine avec application
du charge cr=10N.m pour (1s<t<1.5s)
Page 64
Figure III.12 Structure de la commande en boucle ouverte du couple et de flux Page 65
Figure III.13 Découplage avec variation du couple de référence Page 66

Liste des figures
X
Figure III.14 Schéma bloc de la commande de vitesse d’une MAS avec régulateur PI Page 67
Figure III.15 Réglage de la vitesse en boucle fermé avec régulateur PI Page 68
Figure III.16
Test de robustesse pour Rr = 1,5 Rrn
Page 69
Figure III.17
Test de robustesse pour Rr = 0.5 Rrn
Page 70
Figure III.18 Test de robustesse pour J = 1,5 Jn
Page 71
Chapitre IV
Figure IV.1 Architecture neuronal proposée pour l’implémentation du contrôleur. Page 75
Figure IV.2 erreur d’apprentissage Page 75
Figure IV.3 Contrôle de validation Page 76
Figure IV.4 Schéma bloc de la structure de réglage de vitesse par un contrôleur
neuronal.
Page 76
Figure IV.5 Commande par un régulateur neuronal Page 77
Figure IV.6 Test de la robustesse du régulateur neuronal par la variation
paramétrique
Page 78
Figure IV.7 Schéma bloc d’un contrôleur Page 79
Figure IV.8 Fonction d'appartenance des différentes variables linguistiques. Page 81
Figure IV.9 Schéma bloc de la structure de réglage de vitesse par un contrôleur
flou.
Page 81
Figure IV.10 Commande par un régulateur flou Page 82
Figure IV.11 Validation du contrôleur flou par la variation paramétrique Page 84
Figure IV.12 Structure du modèle ANFIS proposée sous Matlab Page 86
Figure IV.13 Schéma bloc de la structure de réglage de vitesse par un contrôleur
ANFIS.
Page 86
Figure IV.14 Commande par un régulateur hybride (ANFIS) Page 87
Figure IV.15 Tests de robustesse du régulateur ANFIS par la variation paramétrique Page 89

Liste des figures
XI
Figure IV.16 Réponse de la vitesse pour les quatre types de régulateur
Page 90
Introduction Générale
Introduction Générale
1
Introduction Générale
A l’origine, les applications à vitesse variable étaient adaptées seulement à des
moteurs à courant continu, car eux seuls permettaient avec une bonne dynamique, un contrôle
souple et peu coûteux du couple et de la vitesse. La machine à courant continu qui présentait
le meilleur compromis, le couple étant directement proportionnel au courant. Le contrôle du
courant continu dans le régime transitoire, entraîne le contrôle du couple; ceci a été rendu
possible par les progrès de l’électronique et de l’automatique. Les inconvénients majeurs de
ces entraînements étant liés à la limitation et l’usure du contact balais-collecteur des
machines à courant continu. Grâce à l’évolution des technologies de commande (micro-
informatique) et de l’électronique de puissance (micro-électronique) on a assisté au
développement progressif des systèmes d’entraînement réalisés à partir des machines à
courant alternatif. Les machines asynchrones remplacent de plus en plus les machines à
courant continu dans les applications industrielles.
Le grand intérêt de la machine asynchrone est lié à son large champ d’application
industrielle ainsi qu’à ses propriétés de fiabilité, de faible coût et de conception robuste qui
réduis les frais de maintenance. Cette machine, conçue pour les applications à vitesse
constante, est devenue, avec les évolutions de l’électronique de puissance la machine la plus
utilisée pour les entraînements à vitesse variable, nécessitant une alimentation par onduleur de
tension dont les composants commutent très rapidement. Cependant, la simplicité de
conception de cette machine cache une complexité fonctionnelle dûe à l’absence d’inducteur
indépendant et qui apparaît évidemment dans :
-Le modèle dynamique non linéaire du système utilisé (selon leur structure en peut apprécier
les stratégies de commande);
-La difficulté de mesure de certaines grandeurs telles que le flux magnétique et le couple
électromagnétique;
-La sensibilité de la commande aux variations des paramètres électriques dûe à
l’échauffement de la machine, qui représentent une source importante de dégradation des
performances des commandes [1]-[2]-[3]- [4].
Actuellement, plusieurs stratégies de commande existent. La plus connue est la
commande à flux orienté qui permet à la machine d’atteindre des performances dynamiques et
statiques très élevées. Cette technique de commande a été développée pour supprimer le
couplage interne de la machine et la ramener à une commande linéaire similaire à celle de la
machine à courant continu à excitation séparée. Par conséquent, ceci permet de contrôler le
flux de la machine avec la composante 𝑖𝑠𝑑 du courant statorique, qui est l’équivalent du
courant inducteur de la machine à courant continu ; alors que, la composante 𝑖𝑠𝑞 permet de
contrôler le couple électromagnétique correspondant au courant induit de la machine à
courant continu [5].

Introduction Générale
2
Bien que la commande vectorielle apporte des solutions en termes de découplage du
flux et de courant, le problème de la robustesse subsiste toujours. Ce problème peut être
solutionné par le recours à la commande avancée bien qu’elle ne soit pas la solution idéale,
mais demeure cependant la plus appropriée [2]. Ces outils intelligents, c’est-à-dire, les
techniques des réseaux de neurones, de la logique floue et des systèmes hybrides ANFIS
(Adaptative Network Fuzzy Inference System), sont très utilisés dans la conception, la
modélisation et la commande des systèmes complexes.
Les réseaux de neurones ont connu un intérêt considérable avec l’apparition de
l’algorithme de retropropagation (Rumelhart et McClelland, 1986) compte tenu de leur
capacité d’apprentissage et d’approximation de fonctions [6]. L’intérêt des réseaux de
neurones provient aussi du fait que vouloir commander un processus revient à lui imposer un
comportement défini à l’avance en fonction des signaux de commande. Dans ce contexte, il
y’a lieu de préciser que la logique floue introduite par Zadeh, se base sur une collection de
règles qui traduisent la stratégie de commande, des systèmes qui présentent des fortes non
linéarité et ne disposant pas de modèle mathématiques précis.
Au cours de ces dernières années, plusieurs hybridations de ces techniques ont vu le
jour comme celle du système ANFIS(Adaptative Network Fuzzy Inference System) [7];
dont la puissance réside dans la possibilité d’incorporer une base de connaissance, de traiter
les données imprécises par logique floue et d’introduire l’apprentissage via le réseau de
neurones.
Les critères de temps de réponse, de dépassement et d'erreur statique peuvent être
Assurés par les techniques de commande conventionnelles, tandis que le critère de robustesse
demeure un défi pour les chercheurs.
Aussi, l’objectif de cette thèse est de se consacrer à exploiter ces nouvelles approches
intelligentes (avancées) dans la commande des machines asynchrones en vue d’obtenir un
système de commande robuste et de meilleures performances
Ce travail est structuré en quatre chapitres :
Le premier chapitre est consacré à la détermination des contraintes de contrôle de la
machine asynchrone par la méthode à flux orienté (méthode indirecte). En premier lieu on
expose les caractéristiques et la nécessité d’utilisation de la commande vectorielle ainsi que
ses limitations. On démontre ensuite l’inconvénient majeur de robustesse de la machine
asynchrone commandée par cette technique. Comme solution on propose des stratégies
avancées pour remédier cet inconvénient.
Dans le deuxième chapitre, on expose les trois techniques de commande avancées de
l’intelligence artificielle. En premier lieu, on présente un rappel théorique sur les réseaux de
neurones suivi d’une description des différentes configurations possibles de l’apprentissage et
de la commande par les réseaux de neurones. Vient ensuite la présentation de l’approche floue
avec une synthèse de conception d’un contrôleur flou. Enfin, la combinaison de réseaux de

Introduction Générale
3
neurones et de la logique floue donne naissance à plusieurs architectures selon les méthodes
de combinaisons neuro-floue.
Le troisième chapitre traite quant à lui la modélisation de la machine asynchrone pour
l’étude de son comportement et l’adoption du modèle de la commande. Ainsi l’ensemble de
l’alimentation par l’onduleur de tension et son contrôle par une Modulation de Largeur
d’Impulsions MLI; et cela à partir de la transformation de Park qui permet d’avoir un modèle
mathématique sous la forme matricielle. Une étude par simulation sous l’environnement
Matlab/Simulink est réalisée avec introduction des perturbations par les variations
paramétriques de la machine.
Enfin, le quatrième et dernier chapitre, il s’intéresse à l’application des approches
intelligentes pour la commande de vitesse de la machine asynchrone à flux orienté. L’outil de
démonstration de robustesse de ces méthodes est l’introduction des variations paramétriques
rotoriques et du moment d’inertie pour manifester les performances des différentes stratégies
proposées dans ce travail. Du point de vue de robustesse, une étude comparative clos ce
travail.
Finalement, pour clôturer cette étude, une conclusion générale présente des perspectives
et des propositions envisagées pour poursuivre cette recherche.


Chapitre I
Contrôle de la Machine
Asynchrone et
Robustesse
Contrôle de La Machine Asynchrone et Robustesse
4
Contrôle de la Machine Asynchrone
et Robustesse
I.1. Introduction
L’évolution récente des entrainements à vitesse variable a permis de remplacer les
machines à courant continu par des machines alternatives associées à des onduleurs. Parmi les
moteurs alternatifs, le moteur asynchrone à cage demeure le plus robuste et le moins couteux.
Sa commande compliquée nécessite un onduleur performant. L’emploi de technique de
Modulation de Largeur d’Impulsion (MLI) permet de créer une onde de tension dont la
fondamentale est d’amplitude réglable et dont les harmoniques sont rejetés vers des
fréquences supérieures ou voisines de celles de découpage ce qui facilite le filtrage du courant
[1].
Pour obtenir des performances dynamiques remarquables pour le moteur, il faut bien
commander son couple. Dans le cas de la machine asynchrone, le couple est issu d’un
couplage entre le flux et le courant. La commande vectorielle permet de découpler le flux et le
courant qui produisent le couple et de maintenir ces deux grandeurs en quadrature.
Les difficultés de la commande des machines asynchrones résident dans le faible
nombre de grandeurs mesurables. Les mesures du flux qui sont très utiles ne sont pas
acceptables au niveau de l’industrie à cause des capteurs qu’elles nécessitent et qui sont trop
fragiles. Ainsi ils doivent être réduits pour des raisons de robustesse [2].
Un système de commande de haute performance demande en général une bonne
réponse en régulation et en poursuite, et qu’il soit insensible (ou peu) aux variations des
conditions de fonctionnement et des paramètres du système. Au cours des dernières
décennies, plusieurs méthodes de commande avancées ont été développées et sont applicables
pour commander les machines asynchrones. Cependant, à cause des caractéristiques non-
linéaires des machines asynchrones et la complexité des algorithmes de commande, les
performances du système commandé ne sont pas toujours assurées. Pour cela, les outils de
l’automatique avancée doivent être mis au service du développement de nouvelle technique
de commande pour les machines à courant alternatives.

Contrôle de La Machine Asynchrone et Robustesse
5
I.2. Commande Vectorielle des Machines Asynchrones
La difficulté majeure rencontrée dans la commande de la vitesse d'une machine
asynchrone réside dans le fort couplage entre le couple et le flux où toute action sur l'un
influe nécessairement sur l'autre. Cette difficulté peut être supprimée par l’application de la
méthode de la commande vectorielle, qui permet de commander séparément le couple et le
flux.
La stratégie de cette technique consiste à orienter le repère de Park (d,q) de tel façon à
annuler l’une des composantes du flux (plus couramment quadratique) et de simplifier
l’expression mathématique du couple. Si le contrôle du flux est réalisé sur les deux
composantes dans le repère de Park, on parle dans ce cas de la commande vectorielle à flux
orienté, le choix de ce dernier permet d’avoir un fonctionnement comparable à ceux de la
machine à courant continu à excitation séparée dont la commande est linéaire [8]- [9]. Dans la
majorité des études de commande, c’est le choix le plus préférable. Il existe deux approches
générales de la commande vectorielle : la méthode directe (méthode de F. Blaschke) et la
méthode indirecte (méthode de K. Hasse) [10].
I.2.1. Contrôle vectoriel direct
Ce mode de contrôle assure un découplage vrai entre le flux et le couple quelque
soit le type de fonctionnement (Comme montré dans la figure I.1), et nécessite que la machine
soit équipée de capteurs de flux (les capteurs mécaniquement fragiles sont soumis à des
conditions sévères dûes aux vibrations et aux échauffements) [1]- [11], ce qui augmente
considérablement le coût de sa fabrication et rend son utilisation plus fragile. Une première
possibilité est de mettre des capteurs de flux dans l’entrefer et de mesurer directement les
composantes ∅𝑠𝑑𝑚 et ∅𝑠𝑞𝑚 de manière à déduire l’amplitude et la phase. Les signaux captés
sont pollués des harmoniques d’encoches et leur fréquence varie avec la vitesse, ce qui
nécessite des filtres ajustables. Dans la majorité des cas, on n’utilise pas des capteurs de
flux, on fait appel à des estimateurs ou à des observateurs à partir de mesures effectuées sur
le montage [1]- [12].
Le flux magnétisant peut être mesuré directement à l'aide des capteurs basés sur l’effet
de Hall ou estimé à partir des signaux de tension statorique et de courant [2].

Contrôle de La Machine Asynchrone et Robustesse
6
∣ ∅𝒎 ∣ Commande
∣ ∅𝑚∗ ∣ de flux
+ 𝑖𝑑𝑠∗
𝐶𝑒∗ 𝑖𝑞𝑠
∗
+
Commande
𝐶𝑒 de couple
Capteurs
∅𝛼 𝑚 de flux
∣ ∅𝑚 ∣ ∅𝛽 𝑚
𝒊𝒂 , 𝒊𝒃 , 𝒊𝒄
Figure I.1 : Méthode directe de commande vectorielle avec un onduleur MLI à courants
imposés (inductance de fuite rotorique négligée)
I.2.2. Contrôle vectoriel indirect
Dans cette méthode, on ne régule pas le flux rotorique et on n’a donc besoin ni de
Capteur ni d’estimateur ou d’observateur de flux. Si on n’utilise pas l’amplitude du flux
rotorique réel,sa position doit être connue pour effectuer les changements de coordonnées, ce
qui exige la présence d’un capteur de position du rotor.
On déduit que cette méthode est simple à réaliser mais exige la présence d’un capteur
de position. Elle propose une reconstitution du flux rotorique ∅𝑟 en boucle ouverte. Donc
elle est très sensible aux variations paramétriques, notamment à celle de la constante de
temps rotorique [1].
La figure I.2 illustre le principe de la méthode indirecte à l'aide du diagramme de
phase. A n'importe quel instant, l'axe électrique d est dans la position angulaire 𝜃𝑒, par rapport
l'axe 𝛼. L’angle 𝜃𝑒, est donné par la somme de la position angulaire du rotor et de la position
angulaire de glissement comme suit [5]:
Transformation
d-q → a- b -c
Régulateurs
de courants
Onduleur
MLI
R.F
R.C
Calcul de
Sin , Cos
√∅𝛼𝑚2 + ∅𝛽𝑚
2
Calcul du
couple
MA


Contrôle de La Machine Asynchrone et Robustesse
7
𝜃𝑒 = 𝜃 + 𝜃𝑔𝑙 (I.1)
𝑤𝑒 . 𝑡 = (𝑤. 𝑡 + 𝑤𝑔𝑙 . 𝑡) = ( 𝑤 + 𝑤𝑔𝑙). 𝑡 (I.2)
Où :
𝜃 , 𝑤 : respectivement sont la position et la vitesse angulaire du rotor;
𝜃𝑒 , 𝑤𝑔𝑙 : respectivement sont la position et la vitesse angulaire de glissement.
Figure I.2 : Diagramme vectoriel pour la commande
vectorielle indirecte
Le flux rotorique Ψdr qui comprend un flux magnétisant et un flux de fuite rotorique
coïncide avec l'axe d comme illustré à la figure I.2. Donc, pour la commande avec
découplage, la composante de flux statorique du courant 𝒊𝒅𝒔 coïncide avec l'axe d et celle
du couple du courant 𝒊𝒒𝒔 coïncide avec l ‘axe q.
Pour la commande avec découplage idéal, il faut que [13]:
Ψqr =𝑑Ψqr
𝑑𝑡= 0 (I.3)
Ψdr = constant (I.4)
𝑑Ψdr
𝑑𝑡= 0 (I.5)
Les équations principales de la commande vectorielle indirecte sont données par :
𝜔𝑠𝑙 =𝐿𝑚
Ψdr.𝑅𝑟
𝐿𝑟. 𝑖𝑞𝑠 (I.6)
𝐿𝑟
𝑅𝑟 .
Ψdr
𝑑𝑡+ Ψdr = 𝐿𝑚. 𝑖𝑑𝑠 (I.7)
𝑇𝑒 =3
2. 𝑝1 .
𝐿𝑚
𝐿𝑟. 𝑖𝑞𝑠. Ψdr (I.8)

Contrôle de La Machine Asynchrone et Robustesse
8
Le schéma bloc du système de commande de vitesse utilisant la méthode indirecte est
illustré à la figure I.3. La composante de flux du courant statorique 𝑖𝑑𝑠∗ correspondant au
flux rotorique Ψdr désiré est déterminée à partir de l'équation (I.7). Dans ce cas, elle est
maintenue constante.
Machine
𝑖𝑑𝑠∗ Asynchrone
𝑖𝑎
𝜔∗ 𝑖𝑞𝑠∗ 𝑖𝑏
𝑖𝑐
𝝎 Régulateur limitation de vitesse cos 𝜃∗ sin 𝜃∗
𝜔𝑛 Ω
𝜔𝑔𝑙∗ 𝜔
+ + Capteur
de vitesse
Figure I.3 : Système de commande de la vitesse par la méthode
de la commande vectorielle indirecte
I.2.3. Comparaison entre les méthodes directe et indirecte
Tableau I.1 Comparaison entre les méthodes directe et indirecte
de commande vectorielle
Directe
Indirecte
Calcul de
l'angle
À partir de la position du flux À partir des pulsations wgl et w
Estimateur de
flux Nécessaire Pas nécessaire
Plage de
fonctionnement
O-wmax (avec estimateur de phir)
0.1 wn-wmax (avec estimateur de phis)
O-wmax
Influence des
paramètres
Rr (avec estimateur de phir)
Rs (avec estimateur de phis)
Rr
Boucles de
commande
- Courant statorique
- Vitesse
- Flux
- Courant statorique
- Vitesse
- Flux (optionnel)
Rég
Onduleur
MLI
𝑑 − 𝑞 à
a-b-c
𝐿𝑚𝑅𝑟
𝐿𝑟 ∣ 𝛹𝑑𝑟 ∣
Intégral
e
Sin/Cos
e
P

Contrôle de La Machine Asynchrone et Robustesse
9
D’après tableau I.1 on constate que la résistance rotorique a la plus grande influence
sur la performance du système de commande, à cause de l’utilisation de cette grandeur pour
le calcul de la pulsation de glissement dans le cas de la commande vectorielle indirecte et
pour l’estimation de flux rotorique dans le cas de la commande directe. En plus l’exigence
d’utilisation des capteurs de flux rend la machine plus fragile et augmente considérablement
son coût de fabrication [2]. De ce qui précède, on déduit que la méthode indirecte est plus
simple que la méthode directe, mais le choix de méthode ainsi que les stratégies varient d’une
application à l’autre.
Le contrôle vectoriel indirect est plus simple que la commande directe. Cependant le
point faible de cette commande est sa faible robustesse vis-à-vis des variations paramétriques,
et en particulier de la variation avec la température et la saturation de la résistance rotorique
qui intervient dans le calcul de 𝜔𝑠𝑙 et effectivement sur la phase du flux par rapport au stator.
On peut améliorer la robustesse de cette commande en faisant appel à des techniques
avancées pour désensibiliser la commande, pour la rendre la moins sensible possible aux
variations de paramètres.
I.3. Techniques avancées de commande des machines asynchrones
Le fonctionnement de la machine asynchrone et son modèle mathématique sont d’une
complexité assez élevée. Un certain nombre de spécificités pose problèmes, dont les plus
sévères sont [2]:
Les courants du circuit rotorique ne sont pas accessibles à la mesure ;
Le couplage entre les phases du rotor et du stator (ce qui est à l’origine du couple)
fait apparaitre des mutuelles inductances variables selon la position du rotor ;
Le principe de fonctionnement de cette machine repose sur l’induction, ce qui fait
qu’ une partie des courants statoriques est utilisée pour magnétiser la machine.
Tous ces points constituent naturellement des obstacles pour concevoir une commande
permettant de réaliser un entraînement performant fonctionnant sous vitesse variable.
L'objectif de la commande en général et de la machine asynchrone en particulier est
d'obtenir un système de haute performance. Plusieurs critères de performance peuvent être
définis à savoir:
1. la précision en poursuite;
2. la précision en régulation :
temps de montée;
temps de réponse;
dépassement;
stabilité;
3. la robustesse vis-à-vis des perturbations (charge, moment d'inertie);
4. insensibilité à des variations paramétriques (résistances principalement).
Contrôle de La Machine Asynchrone et Robustesse
10
Les lois de commande de la machine sont fortement liées aux modèles adoptés, aux
grandeurs que l’on veut contrôler ainsi qu’aux régimes de fonctionnement recherchés. Pour la
commande des grandeurs mécaniques telles que la vitesse, la position ou le couple
(séparément ou simultanément), on fait appel aux commandes linéaires classiques qui sont
très utilisées compte tenu de leurs avantages.
Il existe aujourd'hui des algorithmes de commande sophistiqués qui peuvent répondre
aux besoins dans tous les domaines d'application et en particulier pour la commande des
machines asynchrone [14]. La figure I.4 résume l‘évolution des méthodes de commande
appliquées aux machines asynchrones.
Figure I.4 : Évolution des méthodes de commande applicables
aux machines asynchrones.
Dans les cas difficiles, peuvent être mis en œuvre les commandes optimales, les
commandes adaptatives avec ou sans modèles de référence, les commandes par modes
glissants permettent d’aboutir à des solutions satisfaisantes mais nécessitent souvent des
modèles complets et plus détaillés. A la suite de cette nécessité, les commandes prédictives et
les techniques de l’intelligence artificielle sont introduites pour perfectionner la commande et
améliorer les performances des asservissements quand les modèles sont très mal connus [13].
I.3.1. Techniques avancées de commande
Chaque méthode avancée a des avantages et des inconvénients. Leurs performances
- Commande prédictives
- Commande par logique floue
- Commande par réseaux de neurones
-Commande Hybride ANFIS
- Commandes optimales
- Commandes adaptatives
- Commandes par modes
glissants
Commandes linéaires classiques :
- continus
- discrètes
- PID
Contrôle de La Machine Asynchrone et Robustesse
11
sont excellentes dans plusieurs cas, mais les algorithmes sont complexes et le volume de
calcul parfois très lourd. Le choix de la méthode dépend des applications concrètes, des
performances désirées et du rapport coût/performance.
D’après la présentation de la commande vectorielle directe et indirecte, il ressort
que cette commande présente une grande sensibilité aux variations paramétriques de la
résistance rotorique . Parmi les approches pouvant contourner ces difficultés, la logique floue
semble adaptée au formalisme des notions d’imprécision et permet de déduire les actions
précises à partir de règles floues [15]. Un régulateur par logique floue RLF est un régulateur
non-linéaire, plus robuste que les régulateurs conventionnels, ce qui convient parfaitement à
la commande de machines asynchrones, un procédé fortement non-linéaire.
Les réseaux de neurones (RN ) ont quant à eux l’avantage de robustesse. Ils sont
capables d’identifier différentes situations et de s’adapter au comportement du système. Dans
les domaines techniques, les applications des RN se retrouvent dans les problèmes de
commande et d'estimation, surtout pour les problèmes complexes.
Les régulateurs neuronaux flous sont des systèmes qui appliquent les principes du
réseau neuronal au raisonnement flou. Ce type de régulateur a les avantages de générer
automatiquement les règles floues et de régler les fonctions d'appartenance selon chaque
problème concret.
Les critères de temps de réponse, de dépassement et d'erreur statique peuvent être
assurés par les techniques de commande classiques. Tandis que le critère de robustesse ne
peut être satisfait qu'en appliquant des techniques avancées de commande. L’objectif de cette
thèse et de synthétiser une commande vectorielle par l’utilisation des techniques avancées
pour désensibiliser la commande ou la rendre moins sensible aux variations des paramètres
pour avoir un système de commande robuste et performant [15]. On peut distinguer deux
sortes de robustesse, à savoir :
robustesse vis-à-vis des variations des conditions de travail : changement de charge, de
moment d'inertie, de coefficient de frottement;
robustesse vis-à-vis des variations dues à la variation des paramètres de machines :
résistances, moment d’inertie.
Dans une première étape, on s’intéresse à la commande vectorielle pour supprimer le
couplage interne de la machine. On teste cette technique de commande par simulation et on
démontre les performances de la commande de vitesse avec un régulateur PI traditionnel.
Cette technique de commande présente relativement une certaine sensibilité liée aux
variations paramétriques, elle s'avère limitée. Cette limite peut être surmontée par les
techniques avancées


Contrôle de La Machine Asynchrone et Robustesse
12
Le principe de commande par les techniques de l'intelligence artificielle, a été utilisé
par plusieurs auteurs pour la commande de vitesse [14] -[16]-[17]-[18]. L'utilisation de ces
techniques a beaucoup amélioré les performances d'un système de commande des machines
asynchrones et a donné des performances supérieures à celles des régulateurs PI [7]. Les
principes et les analyses approfondis de ces techniques sont abordés dans le chapitre II. Des
applications numériques sous Simulink Matlab seront implantées dans le chapitre IV.
I.5. CONCLUSION
Ce chapitre, a présenté le principe de la commande vectorielle de la machine
asynchrone, les différentes stratégies de commande basées sur l’orientation du flux rotoriques
sont exprimées et comparées selon les aspects de complexité, d’application et de sensibilité
aux incertitudes du modèle qui sont dûes aux variations paramétriques.
La commande de la machine asynchrone a connu une grande évolution, elle devient la
machine de référence pour les entrainements à vitesse variable. Un organigramme d’évolution
des techniques de commande appliquées aux MAS a été présenté, et l’estimation des
grandeurs non mesurables étant devenue difficile, pour améliorer le circuit de commande du
moteur asynchrone [19], on fera recours aux techniques avancées que nous développerons
dans le chapitre suivant.


Les Techniques de Commandes Avancées
Chapitre II
Les Techniques de Commandes
Avancées
Les Techniques de Commandes Avancées
13
Les Techniques de Commandes
Avancées
II.1. Introduction
Tout processus peut être décrit sous la forme d’un ensemble d’équations
mathématiques dont la résolution permettra de savoir, comment va réagir le processus, suite à
la modification d’une de ses entrées ou à l’arrivée d’une perturbation externe, aussi de définir
les caractéristiques du régulateur en mesure de contrôler au plus près le processus.
Les description mathématiques des processus sont souvent très complexes et exigent
de grandes compétences dans des disciplines très différentes. Pour calculer les paramètres des
régulateurs, il existe plusieurs techniques telles que la méthode de Ziegler et Nichols..ect ; ces
méthodes donnent en général des résultats acceptables, mais ne sont pas efficaces pour tous
les processus dans toutes les conditions.
Avec les progrès technologiques, les régulateurs dont les commandes basées sur les
techniques de l'intelligence artificielle, se sont substitués aux régulateurs PID utilisant le
raisonnement ainsi que le fonctionnement du cerveau humain [20].
Ce chapitre constitue une introduction aux méthodes de commande de l’intelligence
artificielle, il est composé de trois parties :
La première partie est consacrée à la description des réseaux de neurones,
les algorithmes d’apprentissage et les structures des réseaux. Il est aussi important de
présenter les stratégies de commande neuronale.
La deuxième partie est consacrée à l’étude de dimensionnement d’un régulateur
flou, notamment la structure générale de la commande, qui est la configuration de base d’un
régulateur flou. A partir de cette structure, on définit et on précise les différents paramètres
caractérisant cette technique ainsi les étapes principales de leur conception.
La dernière partie, traite la technique d’hybridation entre ces deux approches
(RLF et RN) employées souvent pour la modélisation et la commande des systèmes
complexes.
II.2. Les neurones formels
Un neurone formel est l’association des éléments simples sous la forme de réseaux qui

Les Techniques de Commandes Avancées
14
permet de réaliser des fonctions utiles pour des applications industrielles. Dans la majorité des
cas, la fonction 𝑦, comme le montre la figure II.1, est une fonction non linéaire bornée, dont la
valeur dépend des paramètres de pondération appelés poids; les variables de cette fonction
sont les entrées du neurone et la valeur de la fonction est la sortie. D’après la figure II.1, on a :
𝑦 = 𝑓(𝑥1, 𝑥2, . . . , 𝑥𝑛, 𝜔1, 𝜔2, . . . 𝜔𝑝) (II.1)
𝑥𝑖 : Sont les variables
𝜔𝑗 : Sont des paramètres ajustables.
𝑓 : est une fonction d’activation calcule la valeur de sortie du neurone
𝑦 = 𝑓(∑ 𝜔𝑖. 𝑥𝑖𝑛𝑖=1 ) (II.2)
Entrées
𝑥1
. Sortie 𝑦
.
𝑥𝑛
Figure II.1: Schéma graphique d’un neurone
Un neurone est caractérisé par la fonction d’activation qui détermine ses propres
caractéristiques. Les fonctions les plus utilisées sont la fonction linéaire et la fonction
sigmoïde ; leur choix a une grande importance et dépend souvent du type d’application et du
domaine de variation des variables d’entrée/sortie [6].
x=f (a) x=f(a) x=f(a) x=f(a)
+1 +1 +1 +1
a a a
-1 -1 -1
-1
(a) (b) (c) (d)
Figure II.2 : Différents types de fonctions d’activation pour le neurone formel,
(a) : fonction linéaire, (b): fonction à seuil,
(c): fonction de saturation, (d) : fonction sigmoïde.
II.2.1 Réseaux de neurones
Un réseau de neurones (RN) est un système informatique qui a des caractéristiques
semblables aux réseaux de neurones biologiques. Il est composé de plusieurs neurones
𝑓
Les Techniques de Commandes Avancées
15
arrangés sous forme de blocs différents appelés couches du réseau. Les neurones appartenant
à la même couche utilisent le même type de fonction d’activation et possèdent les mêmes
caractéristiques. La liaison entre deux couches voisines se fait par l’entremise de poids qui ont
le rôle des synapses. La structure du réseau permet de traiter l’information portée par la valeur
de ses poids et le diriger vers la sortie. En général, les structures des réseaux sont divisées en
deux grandes familles : les réseaux de neurone non bouclés et les réseaux de neurones
bouclés.
II.2.1.1. Réseaux non bouclés
Dans ce type de structure dite statique, l’information circulant des entrées vers les
sorties sans retour vers l’arrière. Les neurones de la couche cachée ne sont pas connectés entre
eux. Ils sont utilisés principalement pour effectuer des approximations de fonction non
linéaire, de classification ou de modélisation de processus statiques non linéaire.
Figure II.3: Réseau de neurones non bouclé
II.2.1.2. Réseaux bouclés
Un réseau de neurone bouclé ou dynamique (ou récurrent) possède la même structure
qu’un réseau multicouches complété par des bouclages ou contre-réaction. Les bouclages
peuvent exister entre les neurones de la couche de sortie vers les neurones de la couche
d’entrée ou entre les neurones de la même couche. D’une façon explicite, les bouclages
peuvent exister entre tous les neurones du réseau sans exception.
Les réseaux de neurones bouclés sont utilisés pour effectuer des tâches de
modélisation de systèmes dynamiques, de commande de processus ou de filtrage [13].
Figure II.4: Réseau de neurones bouclé
II.2.2. Apprentissage des réseaux de neurones:
Les Techniques de Commandes Avancées
16
L’apprentissage des réseaux de neurones artificiels est une phase qui permet de
déterminer ou de modifier les paramètres du réseau, afin d’adopter un comportement désiré.
Plusieurs algorithmes d’apprentissage ont été développés depuis la première règle
d’apprentissage de Hebb (1949). Ces algorithmes d’apprentissage sont classés en trois
catégories :
apprentissage supervisé: l’apprentissage supervisé exige la présentation d’une série
d’exemples sur les entrées du réseau [19], une erreur est calculée entre le vecteur des
sorties désirées (appelé cible) et le vecteur des sorties calculés. À cet effet l’algorithme
d’apprentissage adapte les poids du réseau de façon à corriger son comportement [21].
apprentissage semi-supervisé ou apprentissage par renforcement : ce mode
d’apprentissage, suppose qu’un comportement de référence n’est pas possible, mais
permet d’obtenir des indications qualitatives (vrai, faux, ...) sur les performances du
réseau.
apprentissage non supervisé : les données ne contiennent pas d’informations sur la sortie
désirée. Dans ce cas, l’apprentissage est basé sur des probabilités. Le réseau va se
modifier en fonction des régularités statistiques de l’entrée. L’algorithme d’apprentissage
ajuste les paramètres du réseau par une mesure prédéterminée de la qualité de
représentation de la connaissance [21].
II.2.3. Algorithme de rétropropagation du gradient
L’algorithme de rétropropagation (backpropagation) a été mis en évidence au début
des années 80 (Rumelhart et McClelland, 1986). C’est l’un des algorithmes supervisé les plus
utilisés pour l’apprentissage des réseaux de neurones de type statique, qui sont utilisés pour
imiter le comportement d’un élément déjà existant [19]. L’objectif de cet algorithme est de
présenter au réseau un vecteur d’entrées, de procéder au calcul de la sortie par propagation à
travers les couches, de la couche d’entrées vers la couche de sortie en passant par les couches
intermédiaires. Une erreur est obtenue par comparaison entre la sortie trouvée et la sortie
désirée. A partir de cette erreur, le gradient de l’erreur est calculé lequel est à son tour propagé
de la couche de sortie vers la couche d’entrée, d’où le terme de rétro-propagation. Cela permet
la modification des poids du réseau et donc l’apprentissage. L’opération est recommencée
pour chaque vecteur d’entrée et cela jusqu’à ce que le critère d’arrêt soit vérifié [6].
Algorithme d’apprentissage
L’algorithme du rétropropagation du gradient de l’erreur passe par les étapes suivantes [22]:
1. Initialisation des poids 𝑤[𝑞] à des petites valeurs aléatoires.
2. Présentation d’une entrée 𝑥𝑘 et de la sortie désirée 𝑑𝑘

Les Techniques de Commandes Avancées
17
3. Calcul de la sortie actuelle par propagation à travers les couches :
𝑦𝑗[𝑞]
= 𝐹 (∑ 𝑤𝑖𝑗[𝑞]
𝑖 . 𝑦𝑖[𝑞−1]
) (II.3)
où F est la fonction de transfert du neurone et [q] la 𝑞𝑖é𝑚𝑒couche du réseau.
4. Accumulation des erreurs en sortie :
휀 = ∑ ( 𝑑𝑘 − 𝑦𝑘[𝑠])
2
𝑘 (II.4)
Où :
𝑑𝑘 est la sortie désirée associée au vecteur d’entrée 𝑥𝑘.
𝑦𝑘[𝑠] est la sortie obtenue sur la dernière couche au temps t.
휀 est l’erreur.
5. Rétro-propagation du gradient de l’erreur (𝛿) depuis la dernière couche vers la première
couche :
- Pour chaque cellule de sortie :
𝛿𝑖[𝑠]
= − ( 𝑑𝑖 − 𝑦𝑖[𝑠]) . 𝐹(𝑃𝑖
[𝑠]) (II.5)
- Pour chaque cellule cachée :
𝛿𝑖[𝑞]
= −∑ 𝛿𝑘[𝑞+1]
𝑘 . 𝑤𝑘𝑖 . 𝐹(𝑃𝑖[𝑠]) (II.6)
6. Mise à jour des poids selon la règle :
∆𝑤𝑖𝑗[𝑞]
= 𝛼 . ( 𝛿𝑖[𝑞]
. 𝑥𝑖[𝑞]
) (II.7)
Où :
𝛼 est le coefficient d’apprentissage compris dans l’intervalle [0,1]
7. Retour à l’étape 2 tant qu’il y a un nouveau couple.
II.2.4. Approximation de fonctions et prédiction par RN
Les réseaux de neurones sont utilisés comme un approximateur de fonctions non
linéaires liant les variables de sortie aux variables d’entrée du système industriel, dans
l’objectif de reconstruire une variable réelle utile à une décision ultérieure. Cette technique
n’exige aucune connaissance (mathématique, physique ou autre) du système à modéliser. Ces
Les Techniques de Commandes Avancées
18
réseaux représentent donc une boîte noire non linéaire qui peut être dynamique ou statique,
selon la nature du réseau de neurones (réseaux de neurones temporels ou statiques).
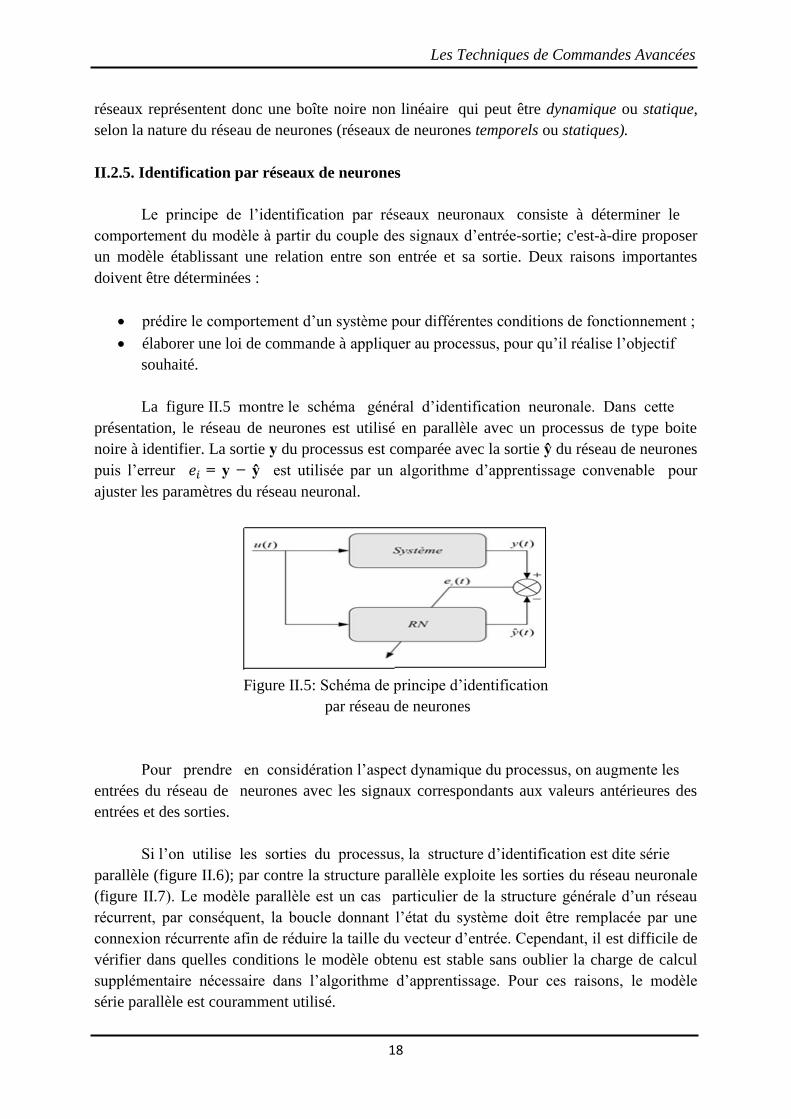
II.2.5. Identification par réseaux de neurones
Le principe de l’identification par réseaux neuronaux consiste à déterminer le
comportement du modèle à partir du couple des signaux d’entrée-sortie; c'est-à-dire proposer
un modèle établissant une relation entre son entrée et sa sortie. Deux raisons importantes
doivent être déterminées :
prédire le comportement d’un système pour différentes conditions de fonctionnement ;
élaborer une loi de commande à appliquer au processus, pour qu’il réalise l’objectif
souhaité.
La figure II.5 montre le schéma général d’identification neuronale. Dans cette
présentation, le réseau de neurones est utilisé en parallèle avec un processus de type boite
noire à identifier. La sortie у du processus est comparée avec la sortie ŷ du réseau de neurones
puis l’erreur 𝑒𝑖 = у − ŷ est utilisée par un algorithme d’apprentissage convenable pour
ajuster les paramètres du réseau neuronal.
Figure II.5: Schéma de principe d’identification
par réseau de neurones
Pour prendre en considération l’aspect dynamique du processus, on augmente les
entrées du réseau de neurones avec les signaux correspondants aux valeurs antérieures des
entrées et des sorties.
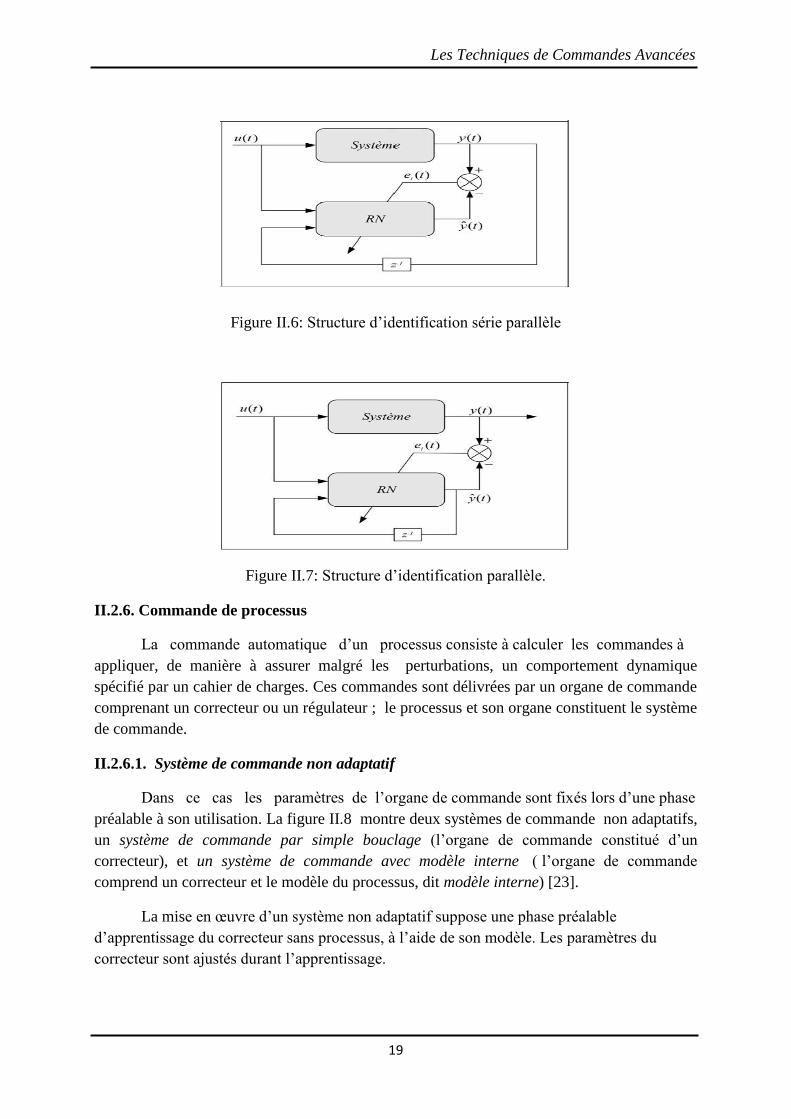
Si l’on utilise les sorties du processus, la structure d’identification est dite série
parallèle (figure II.6); par contre la structure parallèle exploite les sorties du réseau neuronale
(figure II.7). Le modèle parallèle est un cas particulier de la structure générale d’un réseau
récurrent, par conséquent, la boucle donnant l’état du système doit être remplacée par une
connexion récurrente afin de réduire la taille du vecteur d’entrée. Cependant, il est difficile de
vérifier dans quelles conditions le modèle obtenu est stable sans oublier la charge de calcul
supplémentaire nécessaire dans l’algorithme d’apprentissage. Pour ces raisons, le modèle
série parallèle est couramment utilisé.
Les Techniques de Commandes Avancées
19
Figure II.6: Structure d’identification série parallèle
Figure II.7: Structure d’identification parallèle.
II.2.6. Commande de processus
La commande automatique d’un processus consiste à calculer les commandes à
appliquer, de manière à assurer malgré les perturbations, un comportement dynamique
spécifié par un cahier de charges. Ces commandes sont délivrées par un organe de commande
comprenant un correcteur ou un régulateur ; le processus et son organe constituent le système
de commande.
II.2.6.1. Système de commande non adaptatif
Dans ce cas les paramètres de l’organe de commande sont fixés lors d’une phase
préalable à son utilisation. La figure II.8 montre deux systèmes de commande non adaptatifs,
un système de commande par simple bouclage (l’organe de commande constitué d’un
correcteur), et un système de commande avec modèle interne ( l’organe de commande
comprend un correcteur et le modèle du processus, dit modèle interne) [23].
La mise en œuvre d’un système non adaptatif suppose une phase préalable
d’apprentissage du correcteur sans processus, à l’aide de son modèle. Les paramètres du
correcteur sont ajustés durant l’apprentissage.

Les Techniques de Commandes Avancées
20
a)
𝑦𝑝 𝑈 𝑦𝑝
𝑟
b)
𝑦𝑝 𝑈 𝑦𝑝
𝑟 +
--
+
−𝒚
Figure II.8: Systèmes de commandes non adaptatives
a) Commande par simple bouclage
b) Commande par modèle interne
𝑟
𝑦𝑟
𝑦𝑟
+
𝑟 𝑦𝑝 --
𝑦𝑝
𝑢 𝑦
𝑟 𝑒
Figure II.9: Système de commande adaptative.
Correcteur
neuronal Processus
Correcteur
neuronal Processus
Modèle du
processus
Correcteur
neuronal
Modèle de
référence
Modèle du
processus
Processus
Les Techniques de Commandes Avancées
21
II.2.6.2. Système de commande adaptatif
Un système de commande est adaptatif si les paramètres de l’organe de commande
sont ajustés (adaptés) en permanence pendant son utilisation avec le processus. En général, on
effectue cet ajustement par diminution de l’erreur de commande. D’après la figure II.9, les
paramètres du correcteur sont modifiés de manière à diminuer l’erreur 𝑒 = 𝑦𝑟 − 𝑦𝑝 , qui est
la grandeur rétropropagée pour le calcul du gradient du coût [23].
L’utilisation d’un système adaptatif se justifie si le modèle est imprécis ou si ce
dernier n’est pas stationnaire.
II.2.7. Problèmes de commande par RN
On peut mettre hors –ligne un correcteur et le disposer ensuite en cascade avec le
processus. Mais si le processus est non stationnaire, ou si les perturbations sont importantes, il
faut recourir à un système de commande robuste pour garantir un fonctionnement correct.
Un problème d’asservissement de poursuite : consiste à imposer aux sorties du processus
de suivre une consigne variable dans le temps. La dynamique de poursuite est définie par
un modèle de référence.
Un problème de régulation : consiste à partir d’un état initial quelconque, résultant par
exemple de l’effet d’une perturbation, à ramener l’état du processus à une valeur désirée,
en minimisant un cout défini à partir du cahier des charges. Il n’y’ a pas ici de modèle de
référence explicite. Il est souvent possible de réguler plusieurs sorties à l’aide d’une seule
commande.
II.3. La Logique Floue
II.3.1. Introduction à la logique floue
La logique floue (fuzzy logic) qui existait depuis longtemps est d’une grande actualité
aujourd’hui. Initialement, elle a été appliquée dans des domaines non-techniques, tel que : le
commerce, la jurisprudence et la médecine, dans le but de compléter les systèmes experts.
Durant l’année 1985, les Japonais ont commencé à utiliser la logique floue dans les industries
pour résoudre les problèmes de réglage et de commande ; dernièrement, une intense activité
de recherche a débuté en Amérique et en Europe pour introduire le principe du réglage par
logique floue [21].
II.3.2. La régulation floue
C’est une autre méthode de résolution des tâches de régulation complexes. Le
problème des processus dont la description mathématique est complexe lequel n’est pas
possible de traiter par les régulateurs classiques[24], peut être résolu par un régulateur flou qui
peut remplacer ou compléter un régulateur classique, il est intéressant dans le cas de systèmes
non linéaires ou dans le cas de régulation multigrandeurs.
Les Techniques de Commandes Avancées
22
Un régulateur flou convertit des grandeurs d’entrée en grandeurs de sortie qui agissent
ensuite sur le processus ou le système réglé. Plusieurs grandeurs d’entrée et de sortie sont
reliées les unes aux autres de sorte que des systèmes complexes peuvent être régulés
facilement ; les imprécisions typiques des méthodes floues jouent un rôle uniquement à
l’intérieur du régulateur.
II.3.3. Ensembles flous
Mathématiquement, un ensemble flou A d’un univers de discours U, est caractérisé par
une fonction d’appartenance, notée 𝜇𝐴, à valeur dans l’intervalle [0,1] et qui associe à chaque
élément 𝑥 de U un degré d’appartenance 𝜇𝐴(𝑥) indiquant le niveau d’appartenance de 𝑥 à A.
𝜇𝐴(𝑥) = 1 et 𝜇𝐴(𝑥) = 0 correspondent respectivement à l’appartenance et la non-appartenance
[9]. L’univers de discours ou le référentiel est l’ensemble des valeurs réelles que peut prendre
la variable floue x [25].
En logique floue, un sous-ensemble flou A de U est défini par une fonction
d’appartenance 𝜇𝐴(𝑥) pouvant prendre différents valeurs comprise entre 0 et 1, selon le degré
d’appartenance de l’élément x au sous-ensemble A; 𝜇𝐴(𝑥) ∈ [0 1].
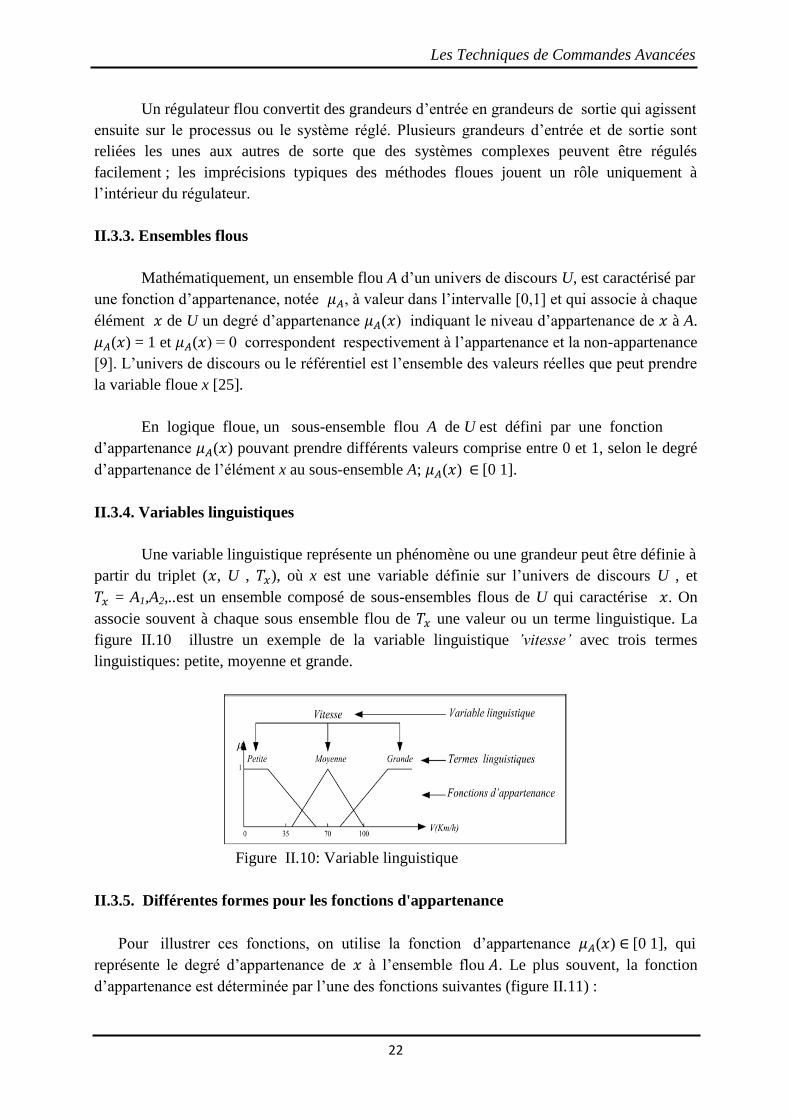
II.3.4. Variables linguistiques
Une variable linguistique représente un phénomène ou une grandeur peut être définie à
partir du triplet (𝑥, U , 𝑇𝑥), où x est une variable définie sur l’univers de discours U , et
𝑇𝑥 = A1,A2,..est un ensemble composé de sous-ensembles flous de U qui caractérise 𝑥. On
associe souvent à chaque sous ensemble flou de 𝑇𝑥 une valeur ou un terme linguistique. La
figure II.10 illustre un exemple de la variable linguistique ’vitesse’ avec trois termes
linguistiques: petite, moyenne et grande.
Figure II.10: Variable linguistique
II.3.5. Différentes formes pour les fonctions d'appartenance
Pour illustrer ces fonctions, on utilise la fonction d’appartenance 𝜇𝐴(𝑥) ∈ [0 1], qui
représente le degré d’appartenance de 𝑥 à l’ensemble flou 𝐴. Le plus souvent, la fonction
d’appartenance est déterminée par l’une des fonctions suivantes (figure II.11) :

Les Techniques de Commandes Avancées
23
Fonction triangulaire
Elle est définie par trois paramètres 𝑎, 𝑏, 𝑐 , qui déterminent les coordonnées des
trois sommets (figure II.11-a) ;
𝜇(𝑥) = max (min ( 𝑥 − 𝑎
𝑏 − 𝑎 ,
𝑐 − 𝑥
𝑐 − 𝑏 ), 0) (II.8)
Fonction trapézoïdale
Elle est définie par quatre paramètres 𝑎, 𝑏, 𝑐, 𝑑 , (figure II.11-b) ;
𝜇(𝑥) = max (min ( 𝑥 − 𝑎
𝑏 − 𝑎 , 1,
𝑑 − 𝑥
𝑑 − 𝑐 ), 0) (II.9)
Fonction gaussienne
Elle est définie par deux paramètres 𝜎,𝑚 , (figure II.11-c) ;
𝜇(𝑥) = 𝑒𝑥𝑝 (−(𝑥−𝑚)2
2.𝜎2) (II.10)
Fonction sigmoïde
Elle est définie par deux paramètres 𝑎, 𝑐 , (figure II.11-d).
𝜇(𝑥) = (1
1+exp (−𝑎(𝑥−𝑐))) (II.11)
Figure II.11: Formes usuelles des fonctions d’appartenance
Les fonctions d’appartenance les plus souvent utilisées sont les fonctions de forme
triangulaire ou trapézoïdale.
II.3.6. Commande par logique floue
Les applications de la logique floue sont extrêmement nombreuses et variées. La plus
courante est celle de la commande floue, dont le domaine essentiel d’application de la logique
est celui du réglage de processus. Lors de la commande d’un processus, les opérateurs
Les Techniques de Commandes Avancées
24
responsables de son fonctionnement sont capables de décider des actions conclues à partir
d’implications floues ; généralement interpréter les mesures sous forme de qualificatifs flous
« petit », « grand », « lent », « rapide » et de raisonner sur les actions correspondantes à ces
états ; si les informations majeurs sont absentes, les mesures sont trop nombreuses, trop
imprécises, la théorie des ensembles flous permet de prendre en compte ces difficultés; car la
logique floue maintenant s’appuie sur des principes scientifiques bien établis et une analyse
plus rationnelle de l’expertise humaine [13]- [26].
La logique floue permet donc d'une part de prendre en compte les imprécisions
inhérentes aux données et d'autre part de rendre compte de l'expression des règles qui
permettent de déterminer une action [21].
II.3.7. Structure d’un contrôleur flou
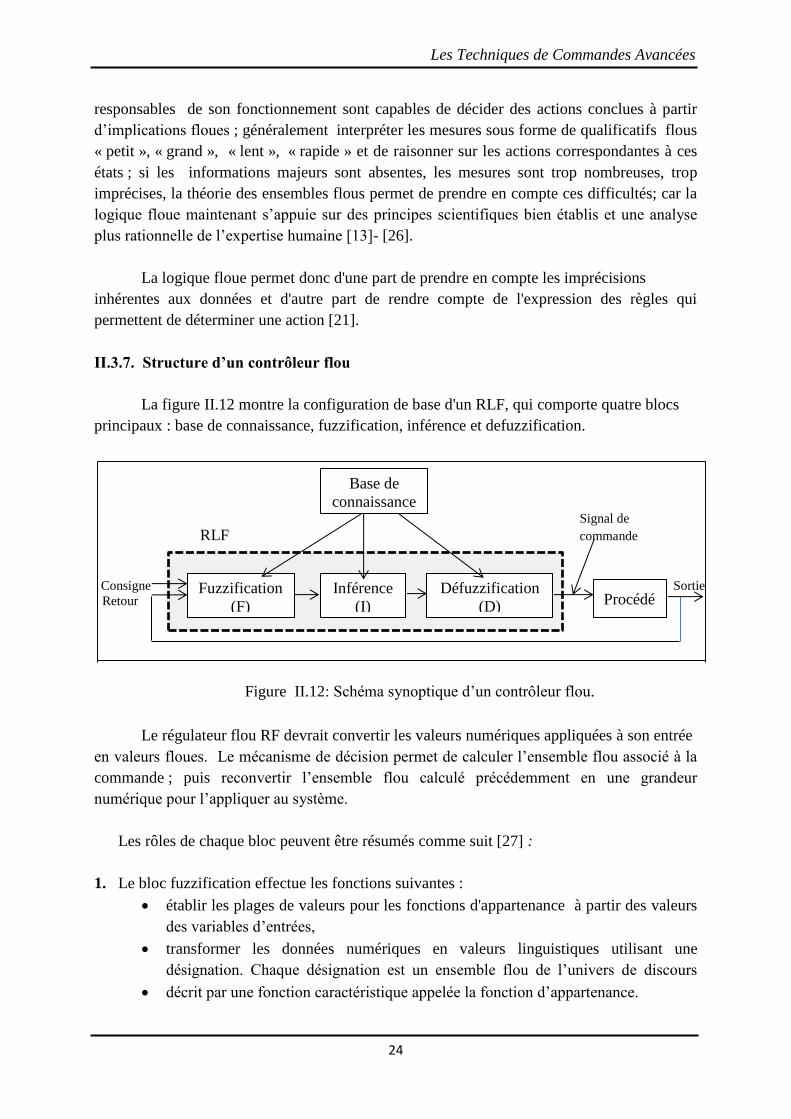
La figure II.12 montre la configuration de base d'un RLF, qui comporte quatre blocs
principaux : base de connaissance, fuzzification, inférence et defuzzification.
Signal de RLF commande Consigne Sortie
Retour
Figure II.12: Schéma synoptique d’un contrôleur flou.
Le régulateur flou RF devrait convertir les valeurs numériques appliquées à son entrée
en valeurs floues. Le mécanisme de décision permet de calculer l’ensemble flou associé à la
commande ; puis reconvertir l’ensemble flou calculé précédemment en une grandeur
numérique pour l’appliquer au système.
Les rôles de chaque bloc peuvent être résumés comme suit [27] :
1. Le bloc fuzzification effectue les fonctions suivantes :
établir les plages de valeurs pour les fonctions d'appartenance à partir des valeurs
des variables d’entrées,
transformer les données numériques en valeurs linguistiques utilisant une
désignation. Chaque désignation est un ensemble flou de l’univers de discours
décrit par une fonction caractéristique appelée la fonction d’appartenance.
Procédé
Défuzzification
(D)
Inférence
(I)
Fuzzification
(F)
Base de
connaissance
Les Techniques de Commandes Avancées
25
2. Le bloc base de connaissance contenant une connaissance dans le domaine d’application
et le résultat de commande prévu. Il consiste en "base de données" et en "base de règles
linguistiques (floues) de commande". Il contient :
la base de données fournissant les informations nécessaire pour les fonctions de
normalisation d’un RF;
la base de règle constitue un ensemble d’expressions symboliques formalisés
auprès d’une connaissance d’expert, une règle indique que, si une condition est
présente dans le fonctionnement du système alors une décision est nécessaire pour
mettre le système dans l’état de fonctionnement désiré, et est du type :
Si ″ condition ″ Alors ″ conséquence″.
3. Le bloc inférence est le cœur d'un RF, il s’appelle mécanisme de décision et permet de
calculer l’ensemble flou associé à la commande à l'aide de l'implication floue et des
règles d'inférence dans la logique floue.
4. Le bloc défuzzification effectue les fonctions suivantes :
établir les plages de valeurs pour les fonctions d'appartenance à partir des valeurs
des variables de sortie;
appliquer pour transformer la partie floue de la commande en une grandeur de
commande à appliquer au système.
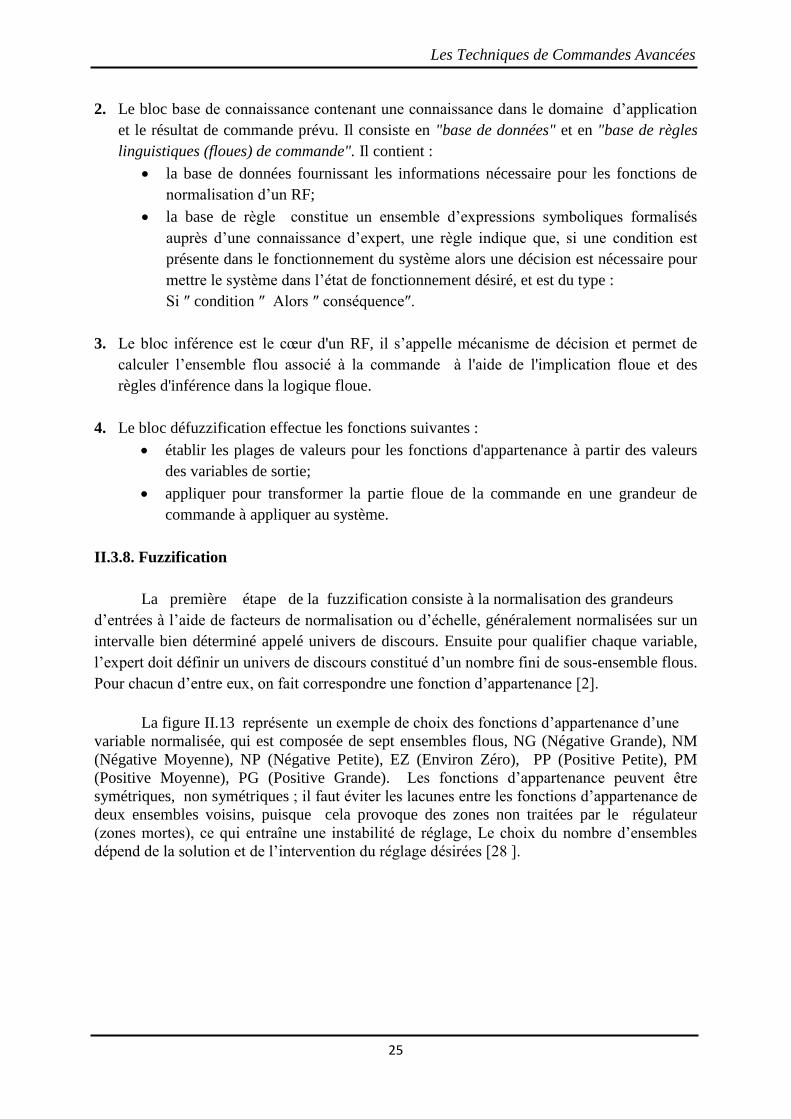
II.3.8. Fuzzification
La première étape de la fuzzification consiste à la normalisation des grandeurs
d’entrées à l’aide de facteurs de normalisation ou d’échelle, généralement normalisées sur un
intervalle bien déterminé appelé univers de discours. Ensuite pour qualifier chaque variable,
l’expert doit définir un univers de discours constitué d’un nombre fini de sous-ensemble flous.
Pour chacun d’entre eux, on fait correspondre une fonction d’appartenance [2].
La figure II.13 représente un exemple de choix des fonctions d’appartenance d’une
variable normalisée, qui est composée de sept ensembles flous, NG (Négative Grande), NM
(Négative Moyenne), NP (Négative Petite), EZ (Environ Zéro), PP (Positive Petite), PM
(Positive Moyenne), PG (Positive Grande). Les fonctions d’appartenance peuvent être
symétriques, non symétriques ; il faut éviter les lacunes entre les fonctions d’appartenance de
deux ensembles voisins, puisque cela provoque des zones non traitées par le régulateur
(zones mortes), ce qui entraîne une instabilité de réglage, Le choix du nombre d’ensembles
dépend de la solution et de l’intervention du réglage désirées [28 ].
Les Techniques de Commandes Avancées
26
𝜇
𝑁𝐺 𝑁𝑀 𝑁𝑃 𝐸𝑍 𝑃𝑃 𝑃𝑀 𝑃𝐺
𝑥
−0,75 −0,5 −0,25 0 0,25 0,5 0,75 Univers de discours
Figure II.13: Fonctions d’appartenance symétriques
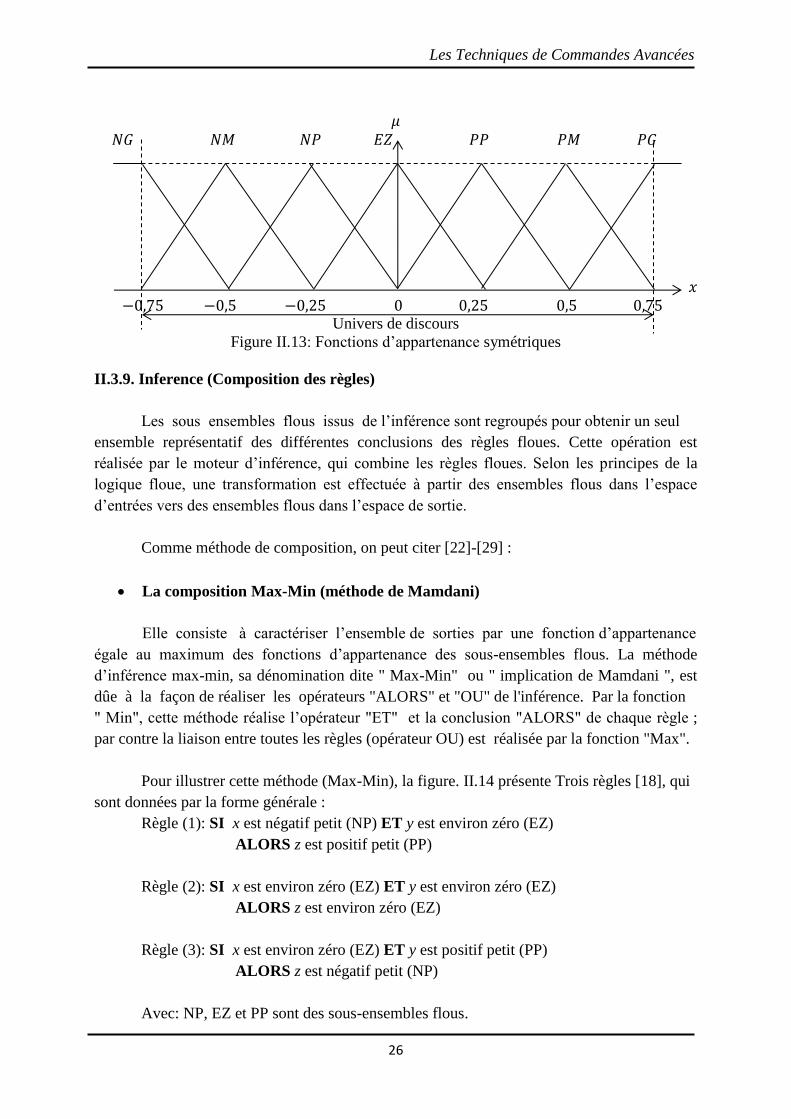
II.3.9. Inference (Composition des règles)
Les sous ensembles flous issus de l’inférence sont regroupés pour obtenir un seul
ensemble représentatif des différentes conclusions des règles floues. Cette opération est
réalisée par le moteur d’inférence, qui combine les règles floues. Selon les principes de la
logique floue, une transformation est effectuée à partir des ensembles flous dans l’espace
d’entrées vers des ensembles flous dans l’espace de sortie.
Comme méthode de composition, on peut citer [22]-[29] :
La composition Max-Min (méthode de Mamdani)
Elle consiste à caractériser l’ensemble de sorties par une fonction d’appartenance
égale au maximum des fonctions d’appartenance des sous-ensembles flous. La méthode
d’inférence max-min, sa dénomination dite " Max-Min" ou " implication de Mamdani ", est
dûe à la façon de réaliser les opérateurs "ALORS" et "OU" de l'inférence. Par la fonction
" Min", cette méthode réalise l’opérateur "ET" et la conclusion "ALORS" de chaque règle ;
par contre la liaison entre toutes les règles (opérateur OU) est réalisée par la fonction "Max".
Pour illustrer cette méthode (Max-Min), la figure. II.14 présente Trois règles [18], qui
sont données par la forme générale :
Règle (1): SI x est négatif petit (NP) ET y est environ zéro (EZ)
ALORS z est positif petit (PP)
Règle (2): SI x est environ zéro (EZ) ET y est environ zéro (EZ)
ALORS z est environ zéro (EZ)
Règle (3): SI x est environ zéro (EZ) ET y est positif petit (PP)
ALORS z est négatif petit (NP)
Avec: NP, EZ et PP sont des sous-ensembles flous.
Les Techniques de Commandes Avancées
27
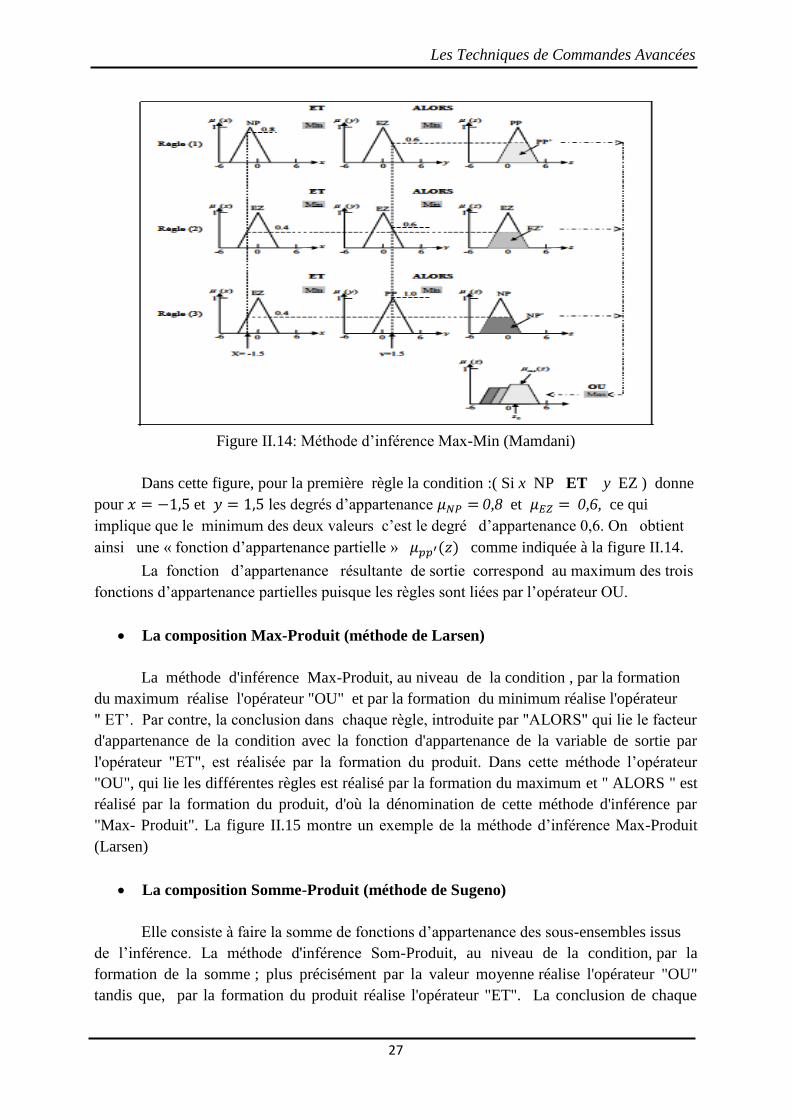
Figure II.14: Méthode d’inférence Max-Min (Mamdani)
Dans cette figure, pour la première règle la condition :( Si x NP ET y EZ ) donne
pour 𝑥 = −1,5 et 𝑦 = 1,5 les degrés d’appartenance 𝜇𝑁𝑃 = 0,8 et 𝜇𝐸𝑍 = 0,6, ce qui
implique que le minimum des deux valeurs c’est le degré d’appartenance 0,6. On obtient
ainsi une « fonction d’appartenance partielle » 𝜇𝑝𝑝′(𝑧) comme indiquée à la figure II.14.
La fonction d’appartenance résultante de sortie correspond au maximum des trois
fonctions d’appartenance partielles puisque les règles sont liées par l’opérateur OU.
La composition Max-Produit (méthode de Larsen)
La méthode d'inférence Max-Produit, au niveau de la condition , par la formation
du maximum réalise l'opérateur "OU" et par la formation du minimum réalise l'opérateur
" ET’. Par contre, la conclusion dans chaque règle, introduite par "ALORS" qui lie le facteur
d'appartenance de la condition avec la fonction d'appartenance de la variable de sortie par
l'opérateur "ET", est réalisée par la formation du produit. Dans cette méthode l’opérateur
"OU", qui lie les différentes règles est réalisé par la formation du maximum et " ALORS " est
réalisé par la formation du produit, d'où la dénomination de cette méthode d'inférence par
"Max- Produit". La figure II.15 montre un exemple de la méthode d’inférence Max-Produit
(Larsen)
La composition Somme-Produit (méthode de Sugeno)
Elle consiste à faire la somme de fonctions d’appartenance des sous-ensembles issus
de l’inférence. La méthode d'inférence Som-Produit, au niveau de la condition, par la
formation de la somme ; plus précisément par la valeur moyenne réalise l'opérateur "OU"
tandis que, par la formation du produit réalise l'opérateur "ET". La conclusion de chaque
Les Techniques de Commandes Avancées
28
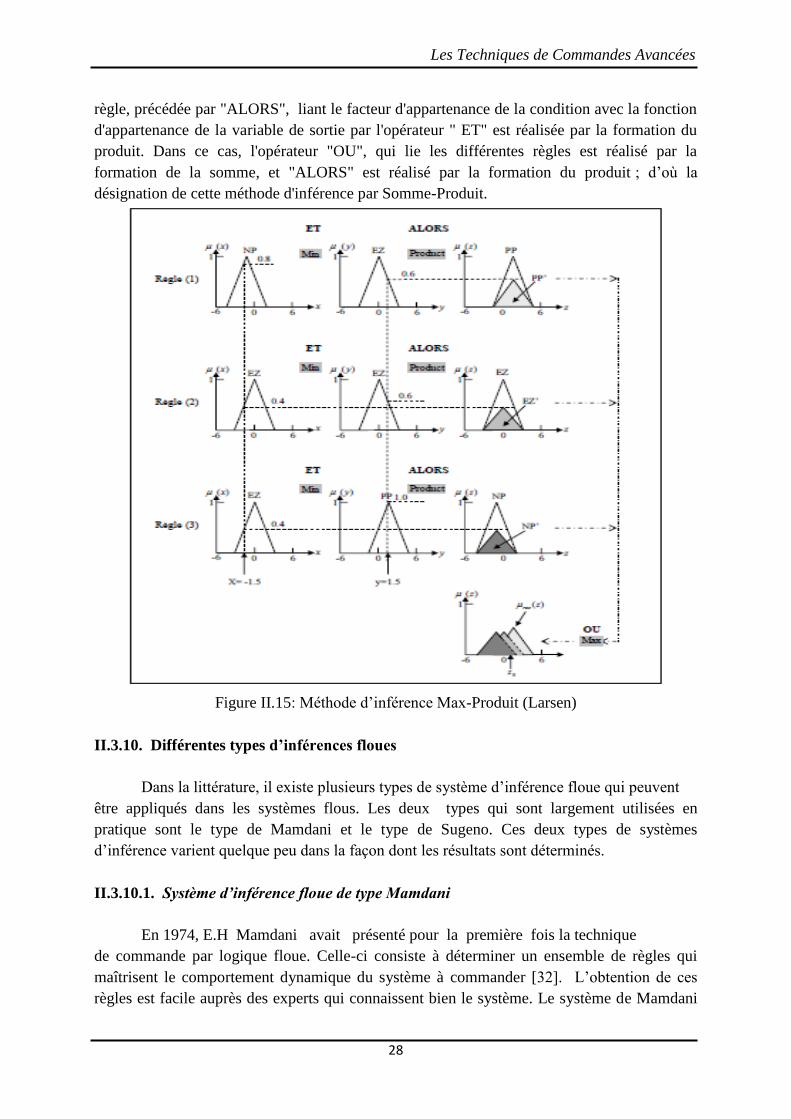
règle, précédée par "ALORS", liant le facteur d'appartenance de la condition avec la fonction
d'appartenance de la variable de sortie par l'opérateur " ET" est réalisée par la formation du
produit. Dans ce cas, l'opérateur "OU", qui lie les différentes règles est réalisé par la
formation de la somme, et "ALORS" est réalisé par la formation du produit ; d’où la
désignation de cette méthode d'inférence par Somme-Produit.
Figure II.15: Méthode d’inférence Max-Produit (Larsen)
II.3.10. Différentes types d’inférences floues
Dans la littérature, il existe plusieurs types de système d’inférence floue qui peuvent
être appliqués dans les systèmes flous. Les deux types qui sont largement utilisées en
pratique sont le type de Mamdani et le type de Sugeno. Ces deux types de systèmes
d’inférence varient quelque peu dans la façon dont les résultats sont déterminés.
II.3.10.1. Système d’inférence floue de type Mamdani
En 1974, E.H Mamdani avait présenté pour la première fois la technique
de commande par logique floue. Celle-ci consiste à déterminer un ensemble de règles qui
maîtrisent le comportement dynamique du système à commander [32]. L’obtention de ces
règles est facile auprès des experts qui connaissent bien le système. Le système de Mamdani
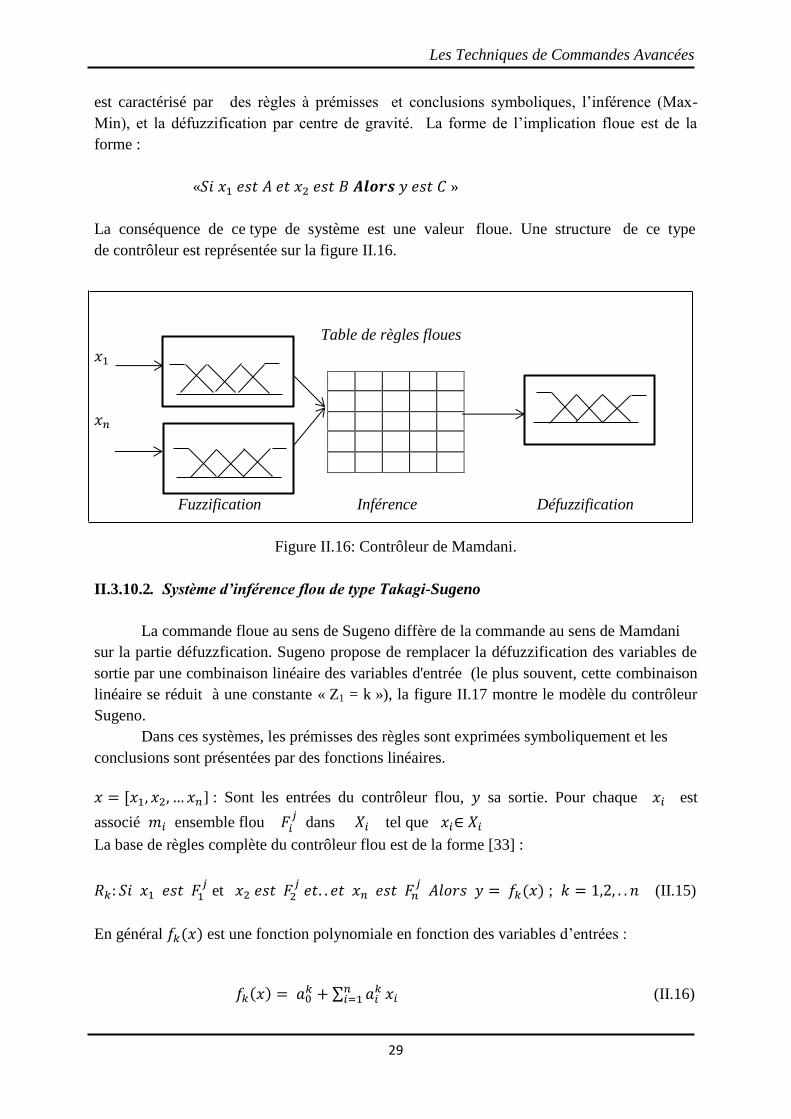
Les Techniques de Commandes Avancées
29
est caractérisé par des règles à prémisses et conclusions symboliques, l’inférence (Max-
Min), et la défuzzification par centre de gravité. La forme de l’implication floue est de la
forme :
«𝑆𝑖 𝑥1 𝑒𝑠𝑡 𝐴 𝑒𝑡 𝑥2 𝑒𝑠𝑡 𝐵 𝑨𝒍𝒐𝒓𝒔 𝑦 𝑒𝑠𝑡 𝐶 »
La conséquence de ce type de système est une valeur floue. Une structure de ce type
de contrôleur est représentée sur la figure II.16.
Table de règles floues
𝑥1
𝑥𝑛
Fuzzification Inférence Défuzzification
Figure II.16: Contrôleur de Mamdani.
II.3.10.2. Système d’inférence flou de type Takagi-Sugeno
La commande floue au sens de Sugeno diffère de la commande au sens de Mamdani
sur la partie défuzzfication. Sugeno propose de remplacer la défuzzification des variables de
sortie par une combinaison linéaire des variables d'entrée (le plus souvent, cette combinaison
linéaire se réduit à une constante « Z1 = k »), la figure II.17 montre le modèle du contrôleur
Sugeno.
Dans ces systèmes, les prémisses des règles sont exprimées symboliquement et les
conclusions sont présentées par des fonctions linéaires.
𝑥 = [𝑥1, 𝑥2, … 𝑥𝑛] : Sont les entrées du contrôleur flou, 𝑦 sa sortie. Pour chaque 𝑥𝑖 est
associé 𝑚𝑖 ensemble flou 𝐹𝑖𝑗 dans 𝑋𝑖 tel que 𝑥𝑖∈ 𝑋𝑖
La base de règles complète du contrôleur flou est de la forme [33] :
𝑅𝑘: 𝑆𝑖 𝑥1 𝑒𝑠𝑡 𝐹1𝑗 et 𝑥2 𝑒𝑠𝑡 𝐹2
𝑗 𝑒𝑡. . 𝑒𝑡 𝑥𝑛 𝑒𝑠𝑡 𝐹𝑛
𝑗 𝐴𝑙𝑜𝑟𝑠 𝑦 = 𝑓𝑘(𝑥) ; 𝑘 = 1,2, . . 𝑛 (II.15)
En général 𝑓𝑘(𝑥) est une fonction polynomiale en fonction des variables d’entrées :
𝑓𝑘(𝑥) = 𝑎0𝑘 + ∑ 𝑎𝑖
𝑘𝑛𝑖=1 𝑥𝑖 (II.16)

Les Techniques de Commandes Avancées
30
Si 𝑓𝑘(𝑥) est une constante :
𝑓𝑘(𝑥) = 𝑎0𝑘 (II.17)
On a donc un contrôleur flou de type Takagi-Sugeno d’ordre zéro. Etant donné que chaque
règle possède une conclusion numérique, on ne passe pas par la procédure de défuzzification.
La sortie du contrôleur flou est donnée par la relation suivante :
𝑦(𝑥) =∑ 𝜇𝑘(𝑥)𝑛
𝑘=1 .𝑓𝑘(𝑥)
∑ 𝜇𝑘(𝑥)𝑛𝑘=1
(II.18)
Avec :
𝜇𝑘(𝑥) = ∏ 𝐹𝑖𝑘 𝑛
𝑖=1 (II.19)
𝐹𝑖𝑘 ∈ 𝐹𝑖
1, 𝐹𝑖2, … 𝐹𝑖
𝑚𝑖 représente le degré d’activation de la règle 𝑅𝑘
Table de règles floues
𝑥1
𝑥𝑛
Fuzzification Inférence Défuzzification
Figure II.17: Contrôleur de Sugeno.
L'avantage de la structure de Sugeno permet une mise en équation nettement plus
simple que la structure de Mamdani, il est en particulier plus facile de déterminer les relations
entrées-sorties.
II.3.11. Défuzzification
La défuzzification permet de générer une valeur numérique à partir de l’ensemble
obtenu par composition des règles. Il existe plusieurs méthodes de défuzzification (au moins
une dizaine). Les méthodes les plus couramment utilisées sont [6]-[30]-[31] :
La méthode de centre de gravité
La défuzzification par centre de gravité consiste à calculer l’abscisse du centre de
gravité de la fonction d’appartenance résultante 𝜇𝑟 de la phase de composition selon la
relation suivante:
Les Techniques de Commandes Avancées
31
𝑦∗ =∫𝑦.𝜇𝑟(𝑦).𝑑𝑦
∫𝜇𝑟(𝑦).𝑑𝑦 (II.12)
En pratique, on estime le centre de gravité en calculant la moyenne d’un certain nombre de
points échantillonnés sur la fonction par la relation suivante:
𝑦∗ =∫𝑦𝑖.𝜇𝑟(𝑦𝑖).𝑑𝑦
∫𝜇𝑟(𝑦𝑖).𝑑𝑦 (II.13)
La méthode de maximum
Cette méthode s’applique seulement dans le cas où la fonction d’appartenance associée
à l’ensemble de sortie n’admet qu’un seul maximum. On choisit comme sortie l’abscisse
𝑦∗correspondant à ce maximum.
La méthode de la moyenne des maxima MOM
Dans cette méthode, la valeur de sortie est estimée par l’abscisse du point
correspondant au centre de l’intervalle M pour lequel la fonction d’appartenance est
maximale. Cette valeur est fournie par l’expression:
𝑦∗ = (𝑖𝑛𝑓 (𝑀)+sup (𝑀)
2) (II.14)
Où 𝑖𝑛𝑓 (𝑀) et 𝑠𝑢𝑝 (𝑀) sont respectivement les bornes inférieure et supérieure de
l’intervalle M.
II.3.12. Conception d'un régulateur flou
Les étapes principales pour concevoir un RF sont données par la figure II.18.
D'abord, il faut étudier le système à régler (procédé), puis établir un modèle mathématique.
On doit plutôt déterminer les grandeurs mesurables et analyser les comportements
dynamiques du procédé selon la variation de la grandeur de commande. Donc une description
complète est réalisée, celle-ci peut faire appel aux variables linguistiques qui peuvent être
incorporées aux connaissances de la théorie de commande.
A partir de cette description, on détermine les bases de données et de règles
nécessaires pour déterminer la stratégie de réglage, et la conception du RF qui comprend la
fuzzification, les inférences et la défuzzification. Il est nécessaire de modifier les fonctions
d'appartenance et les règles floues répétitivement en plusieurs pas, pour trouver un
comportement acceptable.
La connaissance du modèle mathématique du procédé n'est pas nécessaire dans le cas
de la commande par la logique floue. Si le modèle est disponible, on peut l‘utiliser pour tester
et modifier la stratégie de réglage à l'aide d'une simulation numérique.
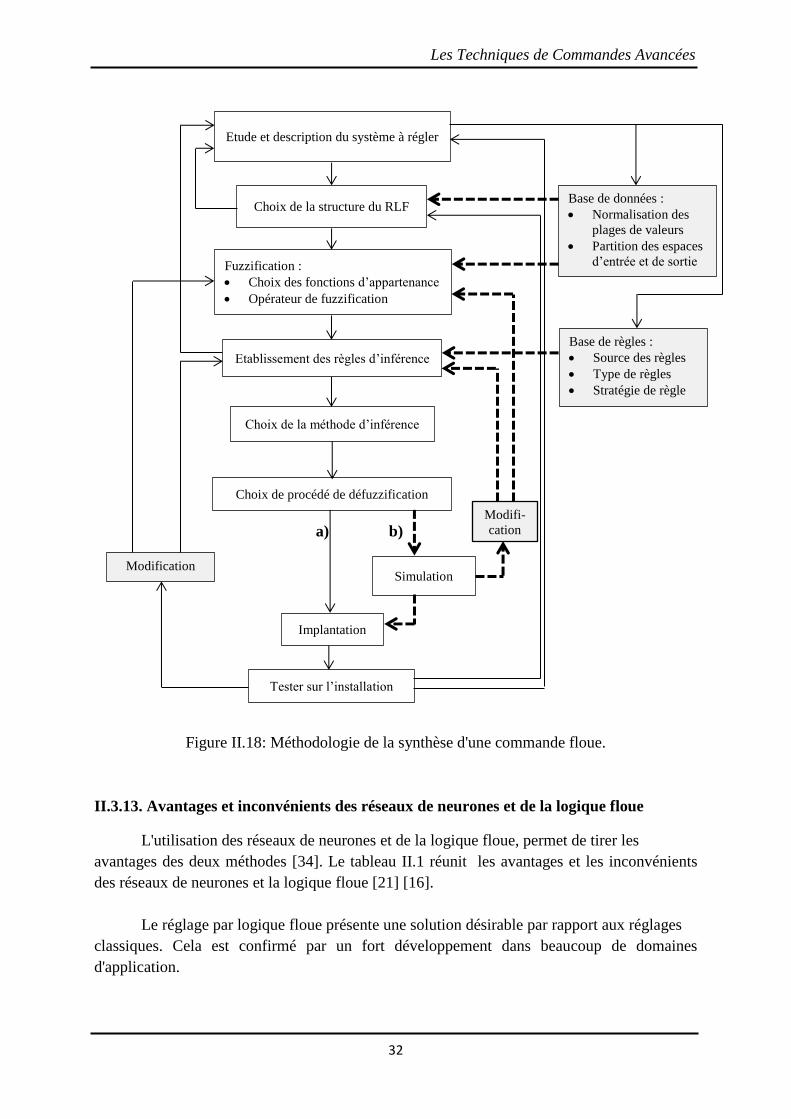
Les Techniques de Commandes Avancées
32
a) b)
Figure II.18: Méthodologie de la synthèse d'une commande floue.
II.3.13. Avantages et inconvénients des réseaux de neurones et de la logique floue
L'utilisation des réseaux de neurones et de la logique floue, permet de tirer les
avantages des deux méthodes [34]. Le tableau II.1 réunit les avantages et les inconvénients
des réseaux de neurones et la logique floue [21] [16].
Le réglage par logique floue présente une solution désirable par rapport aux réglages
classiques. Cela est confirmé par un fort développement dans beaucoup de domaines
d'application.
Etude et description du système à régler
Choix de la structure du RLF
Simulation
Fuzzification :
Choix des fonctions d’appartenance
Opérateur de fuzzification
Implantation
Modification
Base de données :
Normalisation des
plages de valeurs
Partition des espaces
d’entrée et de sortie
Choix de procédé de défuzzification
Choix de la méthode d’inférence
Etablissement des règles d’inférence
Modifi-
cation
Base de règles :
Source des règles
Type de règles
Stratégie de règle
Tester sur l’installation
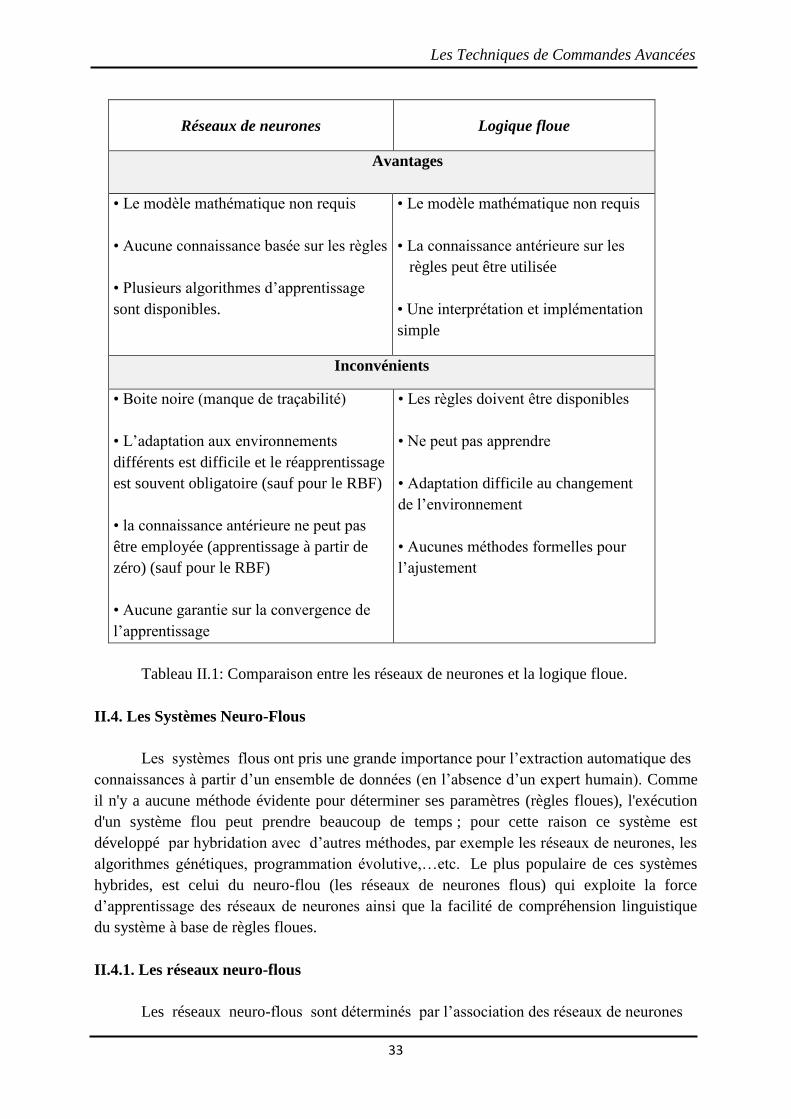
Les Techniques de Commandes Avancées
33
Réseaux de neurones Logique floue
Avantages
• Le modèle mathématique non requis
• Aucune connaissance basée sur les règles
• Plusieurs algorithmes d’apprentissage
sont disponibles.
• Le modèle mathématique non requis
• La connaissance antérieure sur les
règles peut être utilisée
• Une interprétation et implémentation
simple
Inconvénients
• Boite noire (manque de traçabilité)
• L’adaptation aux environnements
différents est difficile et le réapprentissage
est souvent obligatoire (sauf pour le RBF)
• la connaissance antérieure ne peut pas
être employée (apprentissage à partir de
zéro) (sauf pour le RBF)
• Aucune garantie sur la convergence de
l’apprentissage
• Les règles doivent être disponibles
• Ne peut pas apprendre
• Adaptation difficile au changement
de l’environnement
• Aucunes méthodes formelles pour
l’ajustement
Tableau II.1: Comparaison entre les réseaux de neurones et la logique floue.
II.4. Les Systèmes Neuro-Flous
Les systèmes flous ont pris une grande importance pour l’extraction automatique des
connaissances à partir d’un ensemble de données (en l’absence d’un expert humain). Comme
il n'y a aucune méthode évidente pour déterminer ses paramètres (règles floues), l'exécution
d'un système flou peut prendre beaucoup de temps ; pour cette raison ce système est
développé par hybridation avec d’autres méthodes, par exemple les réseaux de neurones, les
algorithmes génétiques, programmation évolutive,…etc. Le plus populaire de ces systèmes
hybrides, est celui du neuro-flou (les réseaux de neurones flous) qui exploite la force
d’apprentissage des réseaux de neurones ainsi que la facilité de compréhension linguistique
du système à base de règles floues.
II.4.1. Les réseaux neuro-flous
Les réseaux neuro-flous sont déterminés par l’association des réseaux de neurones
Les Techniques de Commandes Avancées
34
avec la logique floue. Un système neuro-flou est un réseau de neurones équivalent à la
structure d’un système flou ; il peut être vu comme un système flou pour lequel les opérations
sont implémentées de façon parallèle par un réseau de neurone [21].
Différentes combinaisons de ces deux techniques d’intelligence artificielle existent.
On peut identifier les combinaisons suivantes:
Réseau flou neuronal,
Système neuronal/flou simultanément,
Modèles neuro-flous coopératifs,
Modèles neuro-flous hybrides.
II.4.2. Méthodes et combinaisons neuro-floues
Diverses associations de ces deux méthodes ont été développées depuis 1988 et sont le
plus souvent orientées vers la commande de systèmes complexes et les problèmes de
classification. Il existe ainsi trois méthodes neuro-floues [21]:
Première méthode neuro-floue :
L'une des premières méthodes neuro-floues est le codage du système d'inférences floue
sous la forme d'un réseau de neurones multicouches dans lequel les poids correspondent
aux paramètres du système. L'architecture du réseau dépend du type de règle et des
méthodes d'inférence, d'association et de défuzzification choisies.
Seconde méthode neuro-floue :
Les réseaux de neurones sont affectés à l’apprentissage des fonctions d'appartenance, au
calcul de l'inférence, à la réalisation de la phase d'association et de défuzzification. Ils
peuvent réaliser l'extraction des règles floues en analysant la relation qui existe entre les
entrées et les sorties du réseau de neurones. Donc cette seconde approche consiste à
utiliser les réseaux de neurones pour remplacer chacune des composantes d'un système de
commande floue.
Troisième méthode neuro-floue :
L’association des réseaux de neurones et des systèmes flous peut être en série ou en
parallèle. Deux façons d'utilisation sont possibles :
Le réseau de neurones fonctionne en amont du système flou. Les sorties du réseau de
neurones sont les variantes d'entrées du système flou (dans le cas où elles ne sont pas
mesurables directement), qui aide à la décision,
Les Techniques de Commandes Avancées
35
Un réseau de neurones qui fonctionne en aval du système flou, dans le but d'ajuster les
sorties d'un système de commande floue à de nouvelles connaissances obtenues, les
variables de sorties étant les erreurs sur les variables de sortie du système flou.
Il existe quatre grandes catégories de combinaisons des réseaux de neurones avec la logique
floue [21]:
Réseau flou neuronal :
Dans ce type de réseau, des techniques floues sont utilisées pour augmenter les
possibilités d'apprentissage ou l'exécution d'un réseau neuronal.
Système neuronal/flou simultanément :
Le réseau neuronal et le système flou fonctionnent ensemble sur la même tâche, la
détermination des paramètres de chacun d’eux est autonome ; c’est-à-dire sans l’influence
de l’un sur l’autre.
Modèles neuro-flous coopératifs :
Le réseau neuronal est utilisé pour déterminer les paramètres (les règles et les ensembles
flous) d'un système flou. Après la phase d’apprentissage, le système flou fonctionne sans
le réseau neuronal. C’est une forme simple des systèmes neuro-flous. Elle est largement
répandue dans des outils de développement flous commerciaux.
Modèles neuro-flous hybrides :
Ce sont des modèles neuro-floues modernes. Un réseau neuronal et un système flou sont
combinés dans une architecture homogène. Le système peut être exprimé comme un
réseau neuronal particulier avec des paramètres flous ou comme un système flou mis en
application sous une forme distribuée parallèle.
II.4.3. Systèmes neuro-flous hybrides
a) Architectures Neuro-Floues Hybrides
La Figure II.19 montre les différentes architectures des systèmes neuro-flous [35]
FALCON (a) et GARIC (b) interprètent la règle floue de type I avec une structure à 5
couches, NEFCLASS (c) interprète la règle floue de type II avec une structure à 3 couches
ANFIS (d) interprète la règle floue de type III avec une structure à 6 couches.
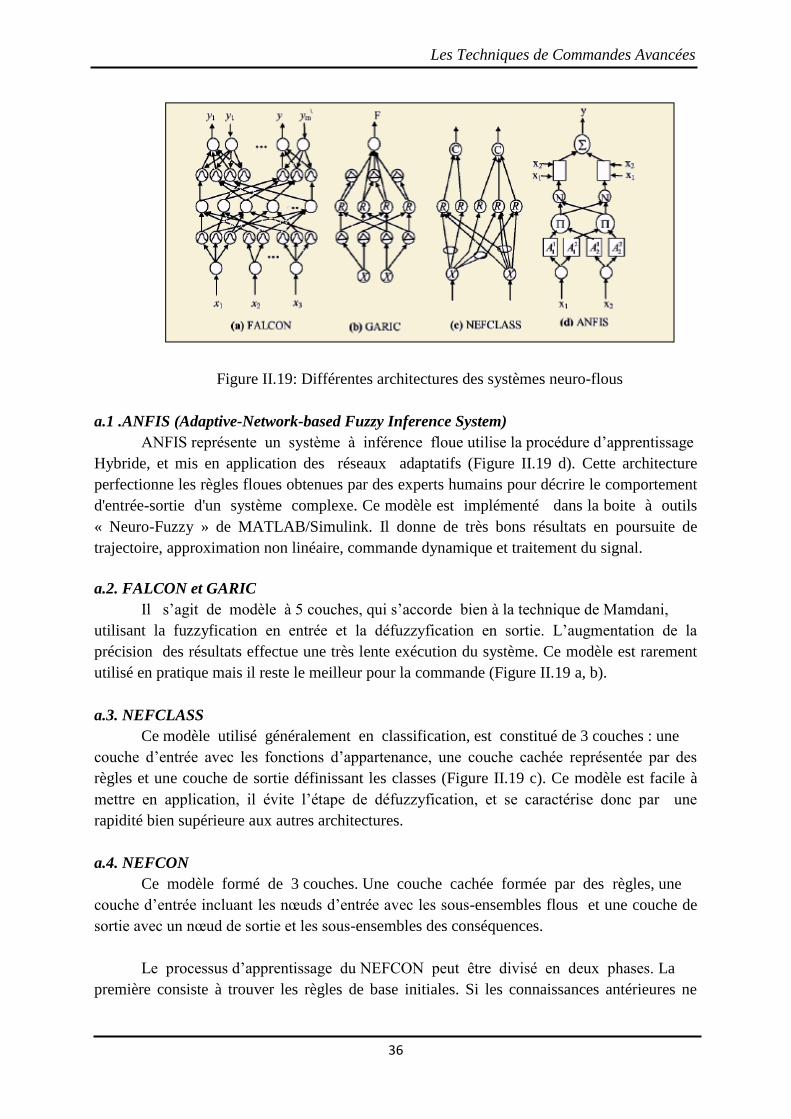
Les Techniques de Commandes Avancées
36
Figure II.19: Différentes architectures des systèmes neuro-flous
a.1 .ANFIS (Adaptive-Network-based Fuzzy Inference System)
ANFIS représente un système à inférence floue utilise la procédure d’apprentissage
Hybride, et mis en application des réseaux adaptatifs (Figure II.19 d). Cette architecture
perfectionne les règles floues obtenues par des experts humains pour décrire le comportement
d'entrée-sortie d'un système complexe. Ce modèle est implémenté dans la boite à outils
« Neuro-Fuzzy » de MATLAB/Simulink. Il donne de très bons résultats en poursuite de
trajectoire, approximation non linéaire, commande dynamique et traitement du signal.
a.2. FALCON et GARIC
Il s’agit de modèle à 5 couches, qui s’accorde bien à la technique de Mamdani,
utilisant la fuzzyfication en entrée et la défuzzyfication en sortie. L’augmentation de la
précision des résultats effectue une très lente exécution du système. Ce modèle est rarement
utilisé en pratique mais il reste le meilleur pour la commande (Figure II.19 a, b).
a.3. NEFCLASS
Ce modèle utilisé généralement en classification, est constitué de 3 couches : une
couche d’entrée avec les fonctions d’appartenance, une couche cachée représentée par des
règles et une couche de sortie définissant les classes (Figure II.19 c). Ce modèle est facile à
mettre en application, il évite l’étape de défuzzyfication, et se caractérise donc par une
rapidité bien supérieure aux autres architectures.
a.4. NEFCON
Ce modèle formé de 3 couches. Une couche cachée formée par des règles, une
couche d’entrée incluant les nœuds d’entrée avec les sous-ensembles flous et une couche de
sortie avec un nœud de sortie et les sous-ensembles des conséquences.
Le processus d’apprentissage du NEFCON peut être divisé en deux phases. La
première consiste à trouver les règles de base initiales. Si les connaissances antérieures ne
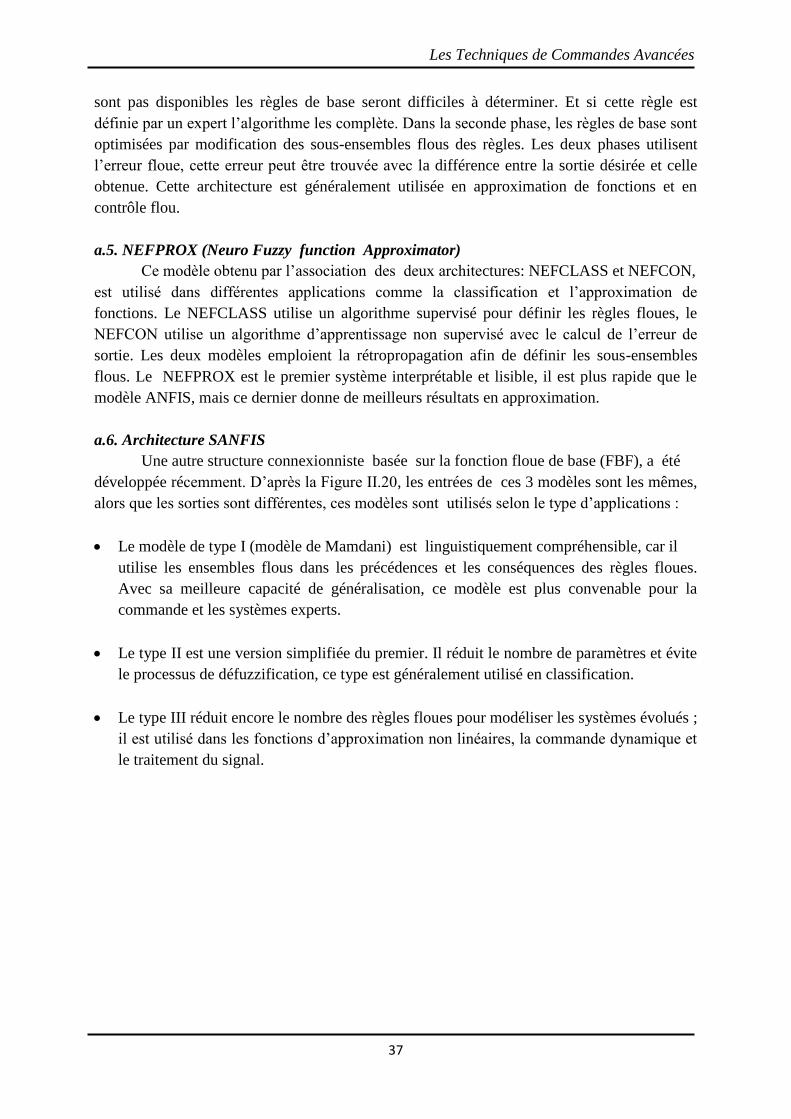
Les Techniques de Commandes Avancées
37
sont pas disponibles les règles de base seront difficiles à déterminer. Et si cette règle est
définie par un expert l’algorithme les complète. Dans la seconde phase, les règles de base sont
optimisées par modification des sous-ensembles flous des règles. Les deux phases utilisent
l’erreur floue, cette erreur peut être trouvée avec la différence entre la sortie désirée et celle
obtenue. Cette architecture est généralement utilisée en approximation de fonctions et en
contrôle flou.
a.5. NEFPROX (Neuro Fuzzy function Approximator)
Ce modèle obtenu par l’association des deux architectures: NEFCLASS et NEFCON,
est utilisé dans différentes applications comme la classification et l’approximation de
fonctions. Le NEFCLASS utilise un algorithme supervisé pour définir les règles floues, le
NEFCON utilise un algorithme d’apprentissage non supervisé avec le calcul de l’erreur de
sortie. Les deux modèles emploient la rétropropagation afin de définir les sous-ensembles
flous. Le NEFPROX est le premier système interprétable et lisible, il est plus rapide que le
modèle ANFIS, mais ce dernier donne de meilleurs résultats en approximation.
a.6. Architecture SANFIS
Une autre structure connexionniste basée sur la fonction floue de base (FBF), a été
développée récemment. D’après la Figure II.20, les entrées de ces 3 modèles sont les mêmes,
alors que les sorties sont différentes, ces modèles sont utilisés selon le type d’applications :
Le modèle de type I (modèle de Mamdani) est linguistiquement compréhensible, car il
utilise les ensembles flous dans les précédences et les conséquences des règles floues.
Avec sa meilleure capacité de généralisation, ce modèle est plus convenable pour la
commande et les systèmes experts.
Le type II est une version simplifiée du premier. Il réduit le nombre de paramètres et évite
le processus de défuzzification, ce type est généralement utilisé en classification.
Le type III réduit encore le nombre des règles floues pour modéliser les systèmes évolués ;
il est utilisé dans les fonctions d’approximation non linéaires, la commande dynamique et
le traitement du signal.
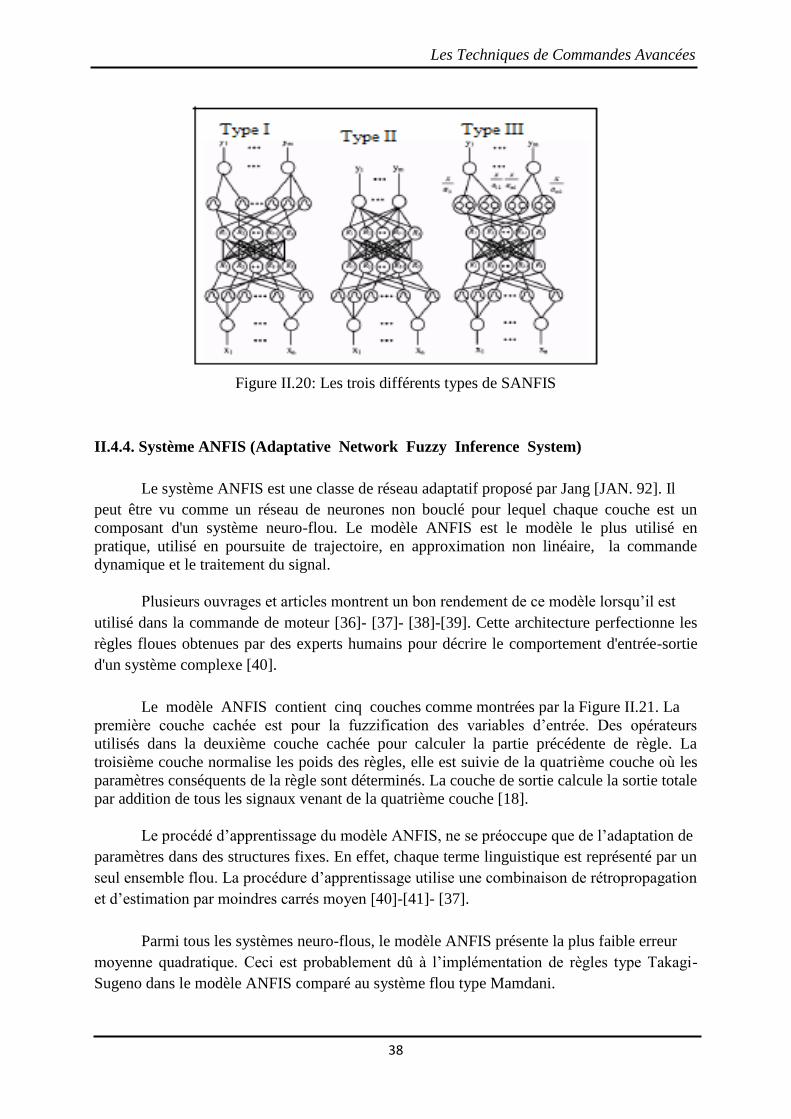
Les Techniques de Commandes Avancées
38
Figure II.20: Les trois différents types de SANFIS
II.4.4. Système ANFIS (Adaptative Network Fuzzy Inference System)
Le système ANFIS est une classe de réseau adaptatif proposé par Jang [JAN. 92]. Il
peut être vu comme un réseau de neurones non bouclé pour lequel chaque couche est un
composant d'un système neuro-flou. Le modèle ANFIS est le modèle le plus utilisé en
pratique, utilisé en poursuite de trajectoire, en approximation non linéaire, la commande
dynamique et le traitement du signal.
Plusieurs ouvrages et articles montrent un bon rendement de ce modèle lorsqu’il est
utilisé dans la commande de moteur [36]- [37]- [38]-[39]. Cette architecture perfectionne les
règles floues obtenues par des experts humains pour décrire le comportement d'entrée-sortie
d'un système complexe [40].
Le modèle ANFIS contient cinq couches comme montrées par la Figure II.21. La
première couche cachée est pour la fuzzification des variables d’entrée. Des opérateurs
utilisés dans la deuxième couche cachée pour calculer la partie précédente de règle. La
troisième couche normalise les poids des règles, elle est suivie de la quatrième couche où les
paramètres conséquents de la règle sont déterminés. La couche de sortie calcule la sortie totale
par addition de tous les signaux venant de la quatrième couche [18].
Le procédé d’apprentissage du modèle ANFIS, ne se préoccupe que de l’adaptation de
paramètres dans des structures fixes. En effet, chaque terme linguistique est représenté par un
seul ensemble flou. La procédure d’apprentissage utilise une combinaison de rétropropagation
et d’estimation par moindres carrés moyen [40]-[41]- [37].
Parmi tous les systèmes neuro-flous, le modèle ANFIS présente la plus faible erreur
moyenne quadratique. Ceci est probablement dû à l’implémentation de règles type Takagi-
Sugeno dans le modèle ANFIS comparé au système flou type Mamdani.
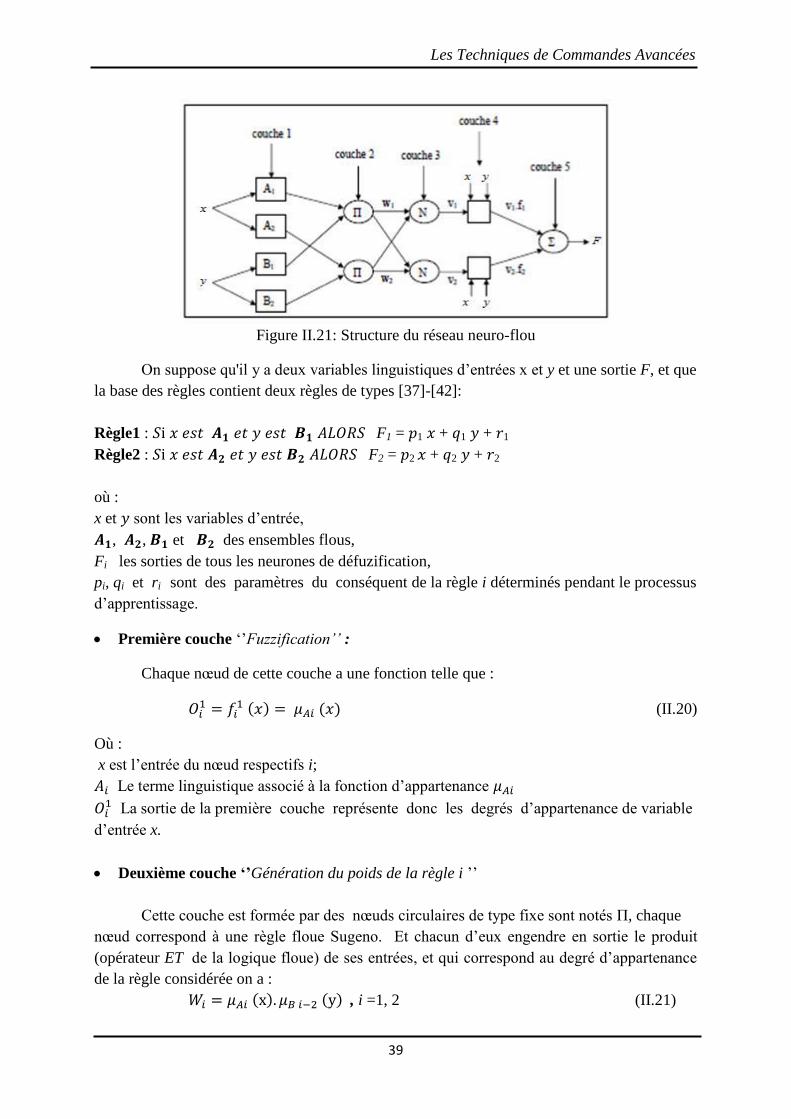
Les Techniques de Commandes Avancées
39
Figure II.21: Structure du réseau neuro-flou
On suppose qu'il y a deux variables linguistiques d’entrées x et y et une sortie F, et que
la base des règles contient deux règles de types [37]-[42]:
Règle1 : 𝑆i 𝑥 𝑒𝑠𝑡 𝑨𝟏 𝑒𝑡 𝑦 𝑒𝑠𝑡 𝑩𝟏 𝐴𝐿𝑂𝑅𝑆 F1 = 𝑝1 𝑥 + 𝑞1 𝑦 + 𝑟1
Règle2 : 𝑆i 𝑥 𝑒𝑠𝑡 𝑨𝟐 𝑒𝑡 𝑦 𝑒𝑠𝑡 𝑩𝟐 𝐴𝐿𝑂𝑅𝑆 F2 = 𝑝2 𝑥 + 𝑞2 𝑦 + 𝑟2
où :
x et 𝑦 sont les variables d’entrée,
𝑨𝟏, 𝑨𝟐, 𝑩𝟏 et 𝑩𝟐 des ensembles flous,
Fi les sorties de tous les neurones de défuzification,
pi, qi et ri sont des paramètres du conséquent de la règle i déterminés pendant le processus
d’apprentissage.
Première couche ‘’Fuzzification’’ :
Chaque nœud de cette couche a une fonction telle que :
𝑂𝑖1 = 𝑓𝑖
1 (𝑥) = 𝜇𝐴𝑖 (𝑥) (II.20)
Où :
x est l’entrée du nœud respectifs i;
𝐴𝑖 Le terme linguistique associé à la fonction d’appartenance 𝜇𝐴𝑖
𝑂𝑖1 La sortie de la première couche représente donc les degrés d’appartenance de variable
d’entrée x.
Deuxième couche ‘’Génération du poids de la règle i ’’
Cette couche est formée par des nœuds circulaires de type fixe sont notés Π, chaque
nœud correspond à une règle floue Sugeno. Et chacun d’eux engendre en sortie le produit
(opérateur ET de la logique floue) de ses entrées, et qui correspond au degré d’appartenance
de la règle considérée on a :
𝑊𝑖 = 𝜇𝐴𝑖 (x). 𝜇𝐵 𝑖−2 (y) , i =1, 2 (II.21)

Les Techniques de Commandes Avancées
40
Troisième couche ‘’Normalisation des poids de la règle i’’
Les nœuds de cette couche sont circulaires et également fixes appelés N, chaque
nœud calcul l’activation normalisée d’une règle floue donnée, selon la relation :
𝑉𝑖 =𝑊𝑖
𝑊1+𝑊2 , i =1, 2 (II.22)
L’ensemble des sorties de cette couche sont appelées les poids normalisés.
Quatrième couche Conséquence ‘’Calcul de la sortie des règles’’ où ‘’Défuzzification’’
Chaque nœud de cette couche est un nœud carré avec une fonction réalisant le calcul
suivant :
𝑂𝑖4 = 𝑉𝑖 . 𝑓𝑖 = 𝑉𝑖 . (𝑝𝑖 𝑥 + 𝑞𝑖 𝑦 + 𝑟𝑖), i =1, 2 (II.23)
Où : 𝑉𝑖 est la sortie de la troisième couche, et 𝑟𝑖 sont l'ensemble des paramètres désignés
sous le nom conséquents.
Cinquième couche ‘’Sommation’’
Comprend un seul nœud qui fournit la sortie de ANFIS en calculant la somme des
sorties de tous les nœuds de défuzzification, c’est-à-dire :
𝑂𝑖5 = 𝐹 = ∑ 𝑉𝑖 . 𝑓𝑖𝑖 (II.24)
II.4.5. Algorithme d'apprentissage
L’apprentissage consiste à l’identification des paramètres des prémisses et des
conséquences, il commence par la construction d’un réseau initial, ensuite il applique une
méthode d’apprentissage par retropropagation de l’erreur. Jang a proposé d’utiliser une règle
d’apprentissage hybride qui combine un algorithme de descente de gradient avec un
algorithme d’estimation par moindres carrées, on a :
𝑓 =𝑊1
𝑊1+𝑊2 . 𝑓1 +
𝑊2
𝑊1+𝑊2 . 𝑓2 (II.25)
𝑓 = 𝑊1 . 𝑓1 + 𝑊2
. 𝑓2 (II.26)
𝑓 = 𝑊1 . (𝑝1 𝑥 + 𝑞1 𝑦 + 𝑟1),+ 𝑊2
. (𝑝2 𝑥 + 𝑞2 𝑦 + 𝑟2) (II.27)

Les Techniques de Commandes Avancées
41
Après arrangement des termes, on trouve :
𝑓 = ( 𝑊1 𝑥)𝑝1 + ( 𝑊1
𝑦)𝑞1 + ( 𝑊1 )𝑟1 + ( 𝑊2
𝑥)𝑝2 + ( 𝑊2 𝑦)𝑞2 + ( 𝑊2
)𝑟2 (II.28)
La relation (II.28) c’est une combinaison linéaire des paramètres conséquents
modifiables, on optimise les paramètres de prémisses et des conséquents, sont représentés par
S1 et S2 telles que :
S1 = a11, b11, c11, a12, b12, c12,…, a1p, b1p, c1p,…, anp, bnp, cnp (II.29)
S2 = 𝑝1, 𝑝1, 𝑝1…, 𝑞2, 𝑞2, 𝑞2…, 𝑟2, 𝑟2, 𝑟2… (II.30)
Avec:
S1 représente les paramètres des ensembles flous utilisés pour la fuzzification dans la
première couche de système ANFIS
S2 représente les coefficients des fonctions linéaires (les paramètres conséquents)
Figure II.22: Méthode d’apprentissage Hybride
D’après la figure II.22 la procédure d’apprentissage se fait en deux étapes :
La première étape c’est le passage en avant, les paramètres de conséquents (linéaire) sont
adaptés par la méthode des moindres carrés itérative, tandis que les paramètres des
prémisses sont maintenus constants.
La deuxième étape c’est le passage en arrière, la méthode de rétropropagation est utilisée
pour modifier les paramètres prémisses (non linéaire), tandis que les paramètres
conséquents restent fixés.
Les Techniques de Commandes Avancées
42
II.4.6. Avantages des techniques neuro-floue
Les techniques de l'intelligence artificielle appliquées à la commande
présentent plusieurs avantages [27]:
Leur conception ne demande pas de modèles mathématiques du processus à commander ;
ainsi elles peuvent combiner la réponse du système et l'expertise humaine,
Elles améliorent les performances de la commande comparées à certaine techniques
classiques,
Elles peuvent profiter de l'expertise humaine,
En l'absence de l'expertise humaine, leur conception peut se baser sur la réponse du
système,
elles tiennent compte des changements qui surviennent dans le processus,
certaines architectures sont moins coûteuses que d'autres en termes d'implémentation
matérielle,
la plupart de ces architectures sont évolutives.
II.5. Conclusion
Dans ce chapitre, nous avons présenté les concepts fondamentaux des réseaux de
neurones, de la logique floue ainsi que les systèmes neuro-flous.
En premier lieu, les propriétés fondamentales des réseaux de neurones sont présentées
et les différentes algorithmes d’apprentissage sont classées. L’un des algorithmes les plus
utilisés pour l’apprentissage est l’algorithme de rétropropagation du gradient qui repose sur
la minimisation d'une fonction du coût quadratique des différences entre les sorties du réseau
et celles désirées.
Cette méthode d'apprentissage est la plus utilisée dans l'entraînement des réseaux de
neurones à cause de sa simplicité. Cependant, elle présente l'inconvénient d'avoir une
convergence très lente. Pour améliorer la performance de rapidité d’exécution du système
flou, un nouveau modèle est engendré : c’est le réseau neuro-flou. Plusieurs architectures ont
été combinées. D’après l’étude que nous avons présentée le modèle ANFIS semble le
modèle la plus performant selon ses caractéristiques.
Chapitre III
Modélisation et Commande
Vectorielle
de la Machine Asynchrone


Modélisation et Commande Vectorielle de la Machine Asynchrone
43
Modélisation et Commande Vectorielle
de la Machine Asynchrone
III.1. Introduction
La modélisation est une discipline fondamentale et indispensable qui précède toutes
les opérations de simulation, de surveillance d’un système ou d’établissement d’une loi de
commande pour la synthèse des boucles de régulation. Si l’utilisateur veut simuler le
comportement dynamique du système et en même temps simuler l’influence de certains
paramètres caractéristiques, il sera nécessaire d’utiliser une représentation à temps continu par
équation différentielle plus proche de la nature physique du système.
Ce chapitre est consacré à la modélisation de la machine asynchrone, et se base dans
ce concept sur le modèle de Park qui fait référence aujourd’hui pour la plupart des synthèse de
commande avancées [1]. Les équations de Park sont devenues importantes pour l’élaboration
du modèle de connaissance, traduisant le comportement électromagnétique et dynamique des
modes électriques de la machine asynchrone. Ensuite, une étude est destinée à modéliser
l’onduleur de tension et son contrôle par une modulation de largeur d’impulsions.
Le contrôle de vitesse de la machine asynchrone nécessite un comportement beaucoup
plus acceptable, et pour cela on fait recours à la commande vectorielle, qui donne des
fonctionnements comparables à ceux de la machine à courant continu à excitation séparée.
Enfin, on démontre la réalisation de cette commande à la machine asynchrone alimentée par
l’onduleur de tension, et on vérifie sa robustesse vis-à-vis des variations paramétriques.
III.2. Modélisation Electrique de La Machine Asynchrone
La modélisation de la machine asynchrone est la traduction de son comportement
dynamique sous forme d’un système algébro-differentiel non linéaire, et qui admet plusieurs
formes de représentation d’état. Ces formes dépendent directement de la source
d’alimentation (tension ou courant), du référentiel choisi (d,q) , des objectifs de commande
(couple, vitesse , position) et du vecteur d’état ; tout ça a pour objectif d’augmenter les
performances dynamiques de la machine.
III.2.1. Hypothèses
Le modèle généralement retenu de la machine asynchrone triphasé repose sur
Modélisation et Commande Vectorielle de la Machine Asynchrone
44
plusieurs hypothèses. La première consiste à considérer que les forces magnétomotrices
créées par les différentes phases du stator et du rotor sont à répartition sinusoïdale le long de
l’entrefer, lorsque ces enroulements sont parcourus par un courant constant. Une répartition
spatiale parfait des bobinages permet d’atteindre cet objectif.
On suppose aussi que l’entrefer de la machine est d’épaisseur constante ; les effets
d’encochages, générateurs d’harmoniques d’espace sont négligés.
Ces hypothèses permettront de résumer la modélisation aux composantes
fondamentales (base fréquence) des grandeurs alternatives. Enfin, pour cette modélisation,
plusieurs hypothèses sont formulées [2]:
la machine est de construction symétrique et l’entrefer est considéré régulier.
Les circuits magnétiques ne sont pas saturés, ne sont pas soumis au phénomène
d’hystérésis et ne sont pas le siège de courant de Foucault (en pratique le circuit
magnétique est feuilleté pour limiter ces effets). Ceci permet de définir des inductances
linéaires.
L’effet de peau n’est pas pris en compte.
La température dans le moteur reste constante quel que soit le point de fonctionnement, ce
qui conduit à des paramètres constants dans les modèles mathématiques (stationnarité).
Ces hypothèses vont permettre l’addition des flux associés aux différents courants,
d’utiliser des inductances propres constantes, de caractériser les couplages par des variations
sinusoïdales des mutuelles inductances et de représenter les flux d’induction par un vecteur
spatial. Elles permettent donc de limiter la complexité de modèles, de développer une
stratégies de commande exploitables en pratique.
En réalité, les paramètres de ces modèles varient avec la saturation, l’effet de peau et
la température ; l’influence de ces variations sur les performances des différentes stratégies de
commande est analysée dans ce travail.
III.2.2. Description paramétrique de la machine asynchrone triphasée
La machine asynchrone étudiée est composée d’un :
stator fixe comportant trois enroulements statoriques identiques disposés sur la longueur
du stator, et dont les axes sont déphasés l’un à l’autre d’un angle électrique de 2. 𝜋/3.
rotor mobile autour de l’axe de symétrie de la machine comportant trois enroulements
rotoriques identiques, et dont les axes sont déphasés entre eux d’un angle électrique de
2. 𝜋/3 , tournant à la vitesse mécanique Ω..

Modélisation et Commande Vectorielle de la Machine Asynchrone
45
Au stator, 𝒱𝑠 , 𝑖𝑠 et ∅𝑠
respectivement les tensions triphasées, les courants triphasés et
les flux triphasés forment trois vecteurs tournant à la vitesse angulaire 𝜔𝑠 par rapport au
stator fixe. Dans le cas où le stator serait composé d’un nombre de paire de pôle par phase, la
vitesse de synchronisme serait Ω𝑠 = 𝜔𝑠/𝑝 .
Au rotor, 𝒱𝑟 , 𝑖𝑟 et ∅𝑟
respectivement les tensions triphasées, les courants triphasés
et les flux triphasés forment trois vecteurs tournant à la vitesse angulaire 𝜔𝑟 par rapport au
rotor avec Ω𝑟 = 𝜔𝑟/𝑝 . Si le rotor tourne à la vitesse Ω, alors ces vecteurs tournent à la
vitesse 𝑝. Ω + 𝜔𝑟 = 𝜔𝑠 par rapport au stator fixe.
Figure III.1 : Représentation schématique d’une
machine asynchrone triphasée.
III.2.3. Mise en équation de la machine asynchrone dans le repère triphasé
La loi de Faraday permet d’écrire : 𝒱 = 𝑅 . 𝑖 +𝑑
𝑑𝑡∅ (III.1)
En appliquant la loi de Faraday à chaque enroulement de la machine représentée par la
figure III.1, on peut écrire :
[𝒱𝑠 ] = 𝑅𝑠 [ 𝑖𝑠 ] +𝑑
𝑑𝑡[∅𝑠 ] (III.2)
[𝒱𝑟 ] = 𝑅𝑟 [ 𝑖𝑟 ] +𝑑
𝑑𝑡[∅𝑟 ] (III.3)
où :
[𝒱𝑠/𝑟 ] = [
𝒱𝑎𝑠/𝑎𝑟
𝒱𝑏𝑠/𝑏𝑟
𝒱𝑐𝑠/𝑐𝑟
] , [𝑖𝑠/𝑟 ] = [
𝑖𝑎𝑠/𝑎𝑟
𝑖𝑏𝑠/𝑏𝑟
𝑖𝑐𝑠/𝑐𝑟
] et [Ø𝑠/𝑟 ] = [
Ø𝑎𝑠/𝑎𝑟
Ø𝑏𝑠/𝑏𝑟
Ø𝑐𝑠/𝑐𝑟
] (III.4)

Modélisation et Commande Vectorielle de la Machine Asynchrone
46
[ 𝑅𝑠 ] = [
𝑅𝑠 0 00 𝑅𝑠 00 0 𝑅𝑠
] , [ 𝑅𝑟 ] = [
𝑅𝑟 0 00 𝑅𝑟 00 0 𝑅𝑟
] (III.5)
Avec :
𝒱𝑠/𝑟, 𝑖𝑠/𝑟, Ø𝑠/𝑟: respectivement la tension, le courant et le flux statorique et rotorique ;
𝑅𝑠 et 𝑅𝑟 : respectivement la résistance du stator et du rotor.
Puisque le rotor est en court-circuit on a: 𝒱𝑎𝑟 = 𝒱𝑏𝑟 = 𝒱𝑐𝑟 = 0. (III.6)
L’équation matricielle du flux est donnée par :
[Ø𝑠
Ø𝑟] = [
[ 𝐿𝑠] [ 𝑀𝑠𝑟][ 𝑀𝑟𝑠] [ 𝐿𝑟]
] . [[𝑖𝑠]𝑖𝑟
] (III.7)
Avec : [𝐿𝑠 ] = [
𝑙𝑠 𝑚𝑠 𝑚𝑠
𝑚𝑠 𝑙𝑠 𝑚𝑠
𝑚𝑠 𝑚𝑠 𝑙𝑠
] , [𝐿𝑟 ] = [
𝑙𝑟 𝑚𝑟 𝑚𝑟
𝑚𝑟 𝑙𝑟 𝑚𝑟
𝑚𝑟 𝑚𝑟 𝑙𝑟
] (III.8)
[ 𝑀𝑠𝑟] = [𝑀𝑟𝑠 ]𝑡 = 𝑚𝑠𝑟
[ cos 𝜃 cos(𝜃 −
4.𝜋
3) cos(𝜃 −
2.𝜋
3)
cos(𝜃 −2.𝜋
3) cos 𝜃 cos(𝜃 −
4.𝜋
3)
cos(𝜃 −4.𝜋
3) cos(𝜃 −
2.𝜋
3) cos 𝜃 ]
(III.9)
où :
𝑙𝑠 (𝑙𝑟) : l’inductance propre d'une phase statorique (rotorique),
𝑚𝑠 (𝑚𝑟) : l’inductance mutuelle entre deux phases statoriques (rotoriques)
𝑚𝑠𝑟 : le maximum de l'inductance mutuelle entre une phase statorique et une phase
rotorique.
On obtient finalement le modèle asynchrone triphasé :
[𝒱𝑠𝑎𝑏𝑐 ] = [ 𝑅𝑠 ]. [ 𝑖𝑠𝑎𝑏𝑐 ] +𝑑
𝑑𝑡([𝐿𝑠 ]. [ 𝑖𝑠𝑎𝑏𝑐 ] + [ 𝑀𝑠𝑟] . [ 𝑖𝑟𝑎𝑏𝑐 ])
(III.10)
[𝒱𝑟𝑎𝑏𝑐 ] = [ 𝑅𝑟 ]. [ 𝑖𝑟𝑎𝑏𝑐 ] +𝑑
𝑑𝑡([ 𝑀𝑟𝑠 ] . [ 𝑖𝑠𝑎𝑏𝑐 ] + [𝐿𝑟]. [ 𝑖𝑟𝑎𝑏𝑐 ])
III.2.4. Modélisation de la machine asynchrone dans le repère biphasé de PARK
La modélisation de la machine asynchrone MAS nous conduit à des équations
différentielles à coefficient variables, ce qui rend l’étude analytique du comportement du
système très difficile. Pour cela ont recourt à l’utilisation de la transformation de Park qui
permet de contourner dans un premier temps ces problèmes, et d’obtenir un système
d’équations à coefficients constants ce qui facilite sa résolution.
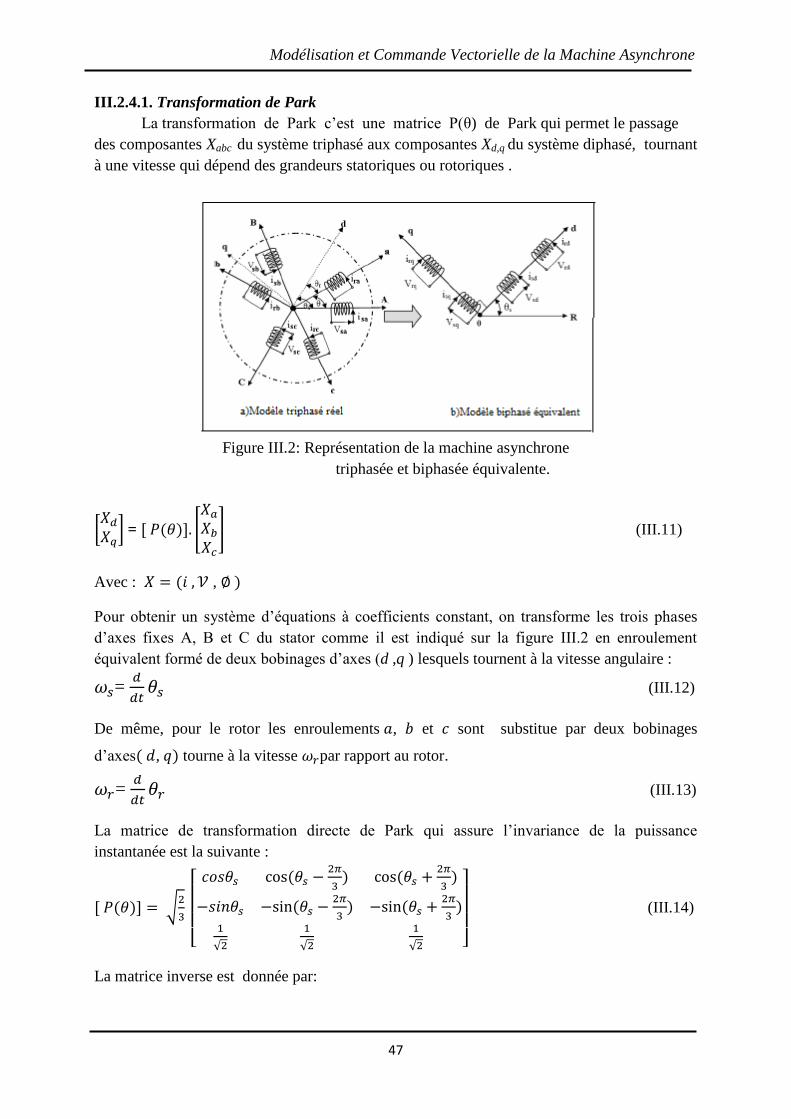
Modélisation et Commande Vectorielle de la Machine Asynchrone
47
III.2.4.1. Transformation de Park
La transformation de Park c’est une matrice P(θ) de Park qui permet le passage
des composantes Xabc du système triphasé aux composantes Xd,q du système diphasé, tournant
à une vitesse qui dépend des grandeurs statoriques ou rotoriques .
Figure III.2: Représentation de la machine asynchrone
triphasée et biphasée équivalente.
[𝑋𝑑
𝑋𝑞] = [ 𝑃(𝜃)]. [
𝑋𝑎
𝑋𝑏
𝑋𝑐
] (III.11)
Avec : 𝑋 = (𝑖 , 𝒱 , ∅ )
Pour obtenir un système d’équations à coefficients constant, on transforme les trois phases
d’axes fixes A, B et C du stator comme il est indiqué sur la figure III.2 en enroulement
équivalent formé de deux bobinages d’axes (d ,q ) lesquels tournent à la vitesse angulaire :
𝜔𝑠= 𝑑
𝑑𝑡𝜃𝑠 (III.12)
De même, pour le rotor les enroulements 𝑎, 𝑏 et 𝑐 sont substitue par deux bobinages
d’axes( 𝑑, 𝑞) tourne à la vitesse 𝜔𝑟par rapport au rotor.
𝜔𝑟= 𝑑
𝑑𝑡𝜃𝑟 (III.13)
La matrice de transformation directe de Park qui assure l’invariance de la puissance
instantanée est la suivante :
[ 𝑃(𝜃)] = √2
3
[ 𝑐𝑜𝑠𝜃𝑠 cos (𝜃𝑠 −
2𝜋
3) cos (𝜃𝑠 +
2𝜋
3)
−𝑠𝑖𝑛𝜃𝑠 −sin (𝜃𝑠 −2𝜋
3) −sin(𝜃𝑠 +
2𝜋
3)
1
√2
1
√2
1
√2 ]
(III.14)
La matrice inverse est donnée par:

Modélisation et Commande Vectorielle de la Machine Asynchrone
48
[ 𝑃(𝜃)]−1 = √2
3
[ 𝑐𝑜𝑠𝜃𝑠 −𝑠𝑖𝑛𝜃𝑠
1
√2
cos (𝜃𝑠 −2𝜋
3) −sin (𝜃𝑠 −
2𝜋
3)
1
√2
cos (𝜃𝑠 +2𝜋
3) −sin(𝜃𝑠 +
2𝜋
3)
1
√2]
(III.15)
Avec: [𝒱𝑑
𝒱𝑞] = [P(θ) ]. [
𝒱𝑎
𝒱𝑏
𝒱𝑐
] , [
𝒱𝑎
𝒱𝑏
𝒱𝑐
] = [P(θ) ]−𝟏. [𝒱𝑑
𝒱𝑞] (III.16)
III.2.4.2. Transformation de Concordia
Le changement de repères triphasé/biphasé (a, b, c)→(𝛼, 𝛽) peut être réalisé par la
transformation de Concordia.
[𝑋𝛼
𝑋𝛽] =√
2
3 [
1 −1
2−
1
2
0√3
2−
√3
2
] . [𝑋𝑎
𝑋𝑏
𝑋𝑐
] (III.17)
La transformation inverse est donnée par :
[𝑋𝑎
𝑋𝑏
𝑋𝑐
] =√2
3
[
1 0
−1
2
√3
2
−1
2−
√3
2 ]
. [𝑋𝛼
𝑋𝛽] (III.18)
III.2.4.3. Lien entre Park et Concordia
La transformation de Concordia (𝛼, 𝛽) peut être obtenue à partir des composantes de Park
(d, q), en faisant une rotation de l'angle 𝜓. Le passage des composantes de Park à celles de
Concordia se fait par :
[𝑋𝛼
𝑋𝛽] =[
cos (𝜓) −sin (𝜓)sin (𝜓) cos (𝜓)
] . [𝑋𝑑
𝑋𝑞] (III.19)
La transformation inverse : [𝑋𝑑
𝑋𝑞] =[
cos (𝜓) sin (𝜓)−sin (𝜓) cos (𝜓)
] . [𝑋𝛼
𝑋𝛽] (III.20)
III.2.4.4. Choix de référentiel
Il existe différentes possibilités concernant le choix de l’orientation du repère d’axe
(d, q), L’étude analytique du moteur asynchrone à l’aide des composantes de Park nécessite
l’utilisation d’un repère qui permet de simplifier au maximum les expressions analytiques.
Il existe trois choix importants concernant l’orientation du repère d’axes (d, q). En pratique, le
choix se fait en fonction des objectifs de l’application.
Référentiel lié au stator
Caractérisé par 𝜃𝑠= 0, et par conséquent 𝜃𝑟 = −𝜃

Modélisation et Commande Vectorielle de la Machine Asynchrone
49
Ce choix permet de simplifier la transformation de Park en celle de Concordia dans le cas
contraire. C’est ce dernier choix qui est utilisé pour la conception de la commande directe du
couple.
Référentiel lié au rotor
Caractérisé par 𝜃𝑟= 0, et par conséquent 𝜃𝑠 = 𝜃 ; permet l’étude des grandeurs statoriques.
Référentiel lié au champ tournant
𝒅𝜽𝒔
𝒅𝒕= 𝜔𝑠 c’est la position statorique ,
𝒅𝜽𝒓
𝒅𝒕= 𝜔𝑟 c’est la pulsation rotorique et
𝜔𝑟 + 𝜔 = 𝜔𝑠 , avec 𝜔 = 𝑝. Ω c’est la pulsation mécanique.
Ce choix permet d’avoir une pulsation de glissement et s’adapte parfaitement à la
commande vectorielle par orientation du flux rotorique.
III.2.5. Modèle de la MAS alimentée en tension
Les équations des tensions statoriques et rotoriques s’écrivent dans le repère de Park sous la
forme suivante :
[𝒱𝑠𝑑 ] = 𝑅𝑠 𝑖𝑠𝑑 +𝑑
𝑑𝑡∅𝑠𝑑 − 𝜔𝑠Ø𝑠𝑞
[𝒱𝑠𝑞 ] = 𝑅𝑠 𝑖𝑠𝑞 +𝑑
𝑑𝑡∅𝑠𝑞 + 𝜔𝑠Ø𝑠𝑑 (III.21)
0 = 𝑅𝑟 𝑖𝑟𝑑 +𝑑
𝑑𝑡∅𝑟𝑑 − 𝜔𝑟Ø𝑟𝑞
0 = 𝑅𝑟 𝑖𝑟𝑞 +𝑑
𝑑𝑡∅𝑟𝑞 + 𝜔𝑟Ø𝑟𝑑
De plus les composantes des flux statoriques et rotoriques sont exprimées par :
∅𝑠𝑑 = 𝐿𝑠 . 𝑖𝑠𝑑 + 𝐿𝑚. 𝑖𝑟𝑑
∅𝑠𝑞 = 𝐿𝑠 . 𝑖𝑠𝑞 + 𝐿𝑚. 𝑖𝑟𝑞 (III.22)
∅𝑟𝑑 = 𝐿𝑟 . 𝑖𝑟𝑑 + 𝐿𝑚. 𝑖𝑠𝑑
∅𝑟𝑞 = 𝐿𝑟 . 𝑖𝑟𝑞 + 𝐿𝑚. 𝑖𝑠𝑞
Avec :
𝐿𝑠 = 𝑙𝑠 − 𝑚𝑠
𝐿𝑟 = 𝑙𝑟 − 𝑚𝑟 (III.23)
𝐿𝑚 = 2
3.𝑀𝑠𝑟

Modélisation et Commande Vectorielle de la Machine Asynchrone
50
D’abord remplaçons les courants rotoriques et les flux statoriques à partir de ( III.22 )
pour les courants rotoriques :
𝑖𝑟𝑑 =1
𝐿𝑟. ∅𝑟𝑑 −
𝐿𝑚
𝐿𝑟 . 𝑖𝑠𝑑 (III.24)
𝑖𝑟𝑞 =1
𝐿𝑟. ∅𝑟𝑞 −
𝐿𝑚
𝐿𝑟 . 𝑖𝑠𝑞
pour les flux statoriques :
∅𝑠𝑑 = (𝐿𝑠 −𝐿𝑚2
𝐿𝑟 ) . 𝑖𝑠𝑑 +
𝐿𝑚
𝐿𝑟. ∅𝑟𝑑 (III.25)
∅𝑠𝑞 = (𝐿𝑠 −𝐿𝑚2
𝐿𝑟 ) . 𝑖𝑠𝑞 +
𝐿𝑚
𝐿𝑟. ∅𝑟𝑞
En développant les flux en fonction des courants dans les équations des tensions on
obtient le modèle d’état de la MAS alimentée en tension dans le repère d’axe ( d, q) [15] [20]
𝑑
𝑑𝑡𝑖𝑠𝑑 =
1
𝜎.𝐿𝑠[− (𝑅𝑠 +
𝐿𝑚2
𝐿𝑟.𝑇𝑟 ) . 𝑖𝑠𝑑 + 𝜔𝑠 . 𝜎. 𝐿𝑠 . 𝑖𝑠𝑞 +
𝐿𝑚
𝐿𝑟.𝑇𝑟Ø𝑟𝑑 +
𝐿𝑚
𝐿𝑟. 𝜔𝑟 . Ø𝑟𝑞 + 𝒱𝑠𝑑]
𝑑
𝑑𝑡𝑖𝑠𝑞 =
1
𝜎. 𝐿𝑠[−𝜔𝑠 . 𝜎. 𝐿𝑠 . 𝑖𝑠𝑑 − (𝑅𝑠 +
𝐿𝑚2
𝐿𝑟 . 𝑇𝑟 ) . 𝑖𝑠𝑞 −
𝐿𝑚
𝐿𝑟. 𝜔𝑟 . Ø𝑟𝑑 +
𝐿𝑚
𝐿𝑟 . 𝑇𝑟Ø𝑟𝑞 + 𝒱𝑠𝑞]
𝑑
𝑑𝑡∅𝑟𝑑 =
𝐿𝑚
𝑇𝑟. 𝑖𝑠𝑑 −
1
𝑇𝑟. Ø𝑟𝑑 + (𝜔𝑠 − 𝜔𝑟 ). Ø𝑟𝑞 (III.26)
𝑑
𝑑𝑡∅𝑟𝑞 =
𝐿𝑚
𝑇𝑟. 𝑖𝑠𝑞 − (𝜔𝑠 − 𝜔𝑟 ). Ø𝑟𝑑 −
1
𝑇𝑟. Ø𝑟𝑞
𝑑
𝑑𝑡𝜔𝑟 =
𝑃2. 𝐿𝑚
𝐿𝑟 . 𝐽. (𝑖𝑠𝑞 . Ø𝑟𝑑 − 𝑖𝑠𝑑 . Ø𝑟𝑞) −
𝐾𝑓
𝐽. 𝜔𝑟 −
𝑃
𝐽. 𝘤𝑟
Avec :
𝜎 = 1 −𝐿𝑚2
𝐿𝑠𝐿𝑟 : représente le coefficient de dispersion ou de Blondel,
𝑇𝑟 =𝐿𝑟
𝑅𝑟 : la constante de temps rotorique,
∅𝑟 = √∅𝑟𝑑2 + ∅𝑟𝑞
2 : flux rotorique résultant,
𝐼𝑠𝑎 = √2
3 . (𝐼𝑠𝑑 . cos 𝜃𝑠 + 𝐼𝑠𝑞 . sin 𝜃𝑠) : le courant statorique.
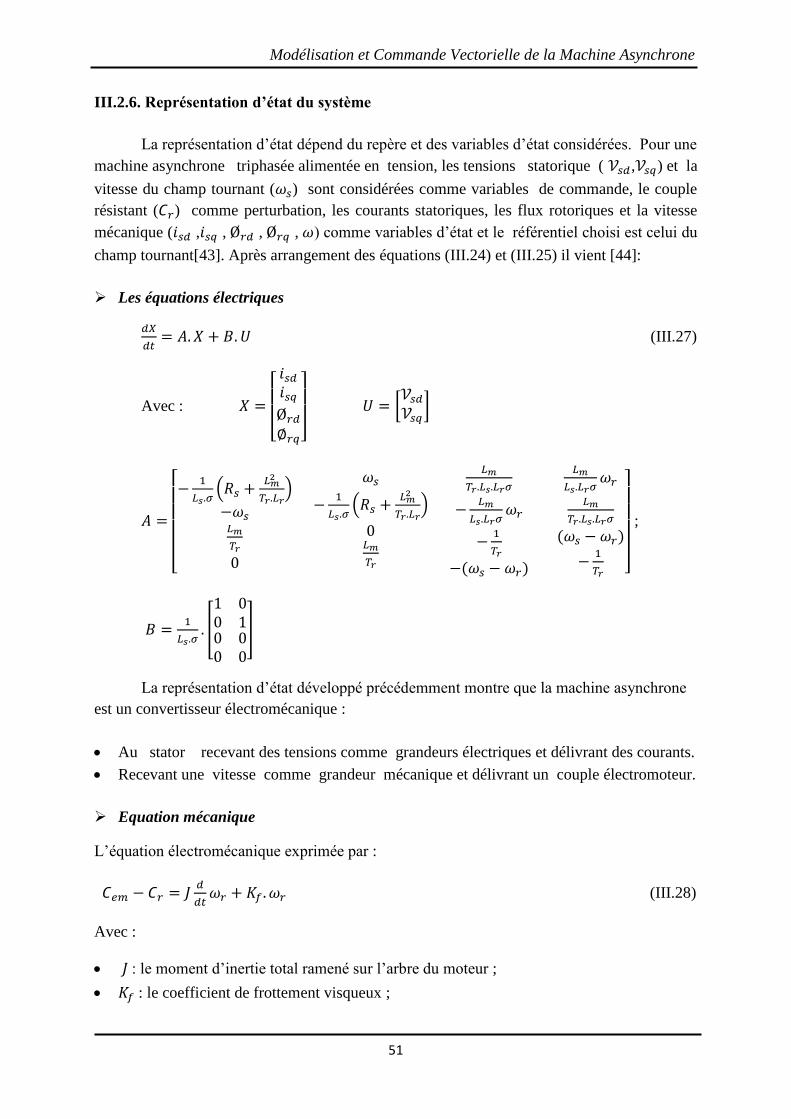
Modélisation et Commande Vectorielle de la Machine Asynchrone
51
III.2.6. Représentation d’état du système
La représentation d’état dépend du repère et des variables d’état considérées. Pour une
machine asynchrone triphasée alimentée en tension, les tensions statorique ( 𝒱𝑠𝑑,𝒱𝑠𝑞) et la
vitesse du champ tournant (𝜔𝑠) sont considérées comme variables de commande, le couple
résistant (𝘊𝑟) comme perturbation, les courants statoriques, les flux rotoriques et la vitesse
mécanique (𝑖𝑠𝑑 ,𝑖𝑠𝑞 , Ø𝑟𝑑 , Ø𝑟𝑞 , 𝜔) comme variables d’état et le référentiel choisi est celui du
champ tournant[43]. Après arrangement des équations (III.24) et (III.25) il vient [44]:
Les équations électriques
𝑑𝑋
𝑑𝑡= 𝐴. 𝑋 + 𝐵.𝑈 (III.27)
Avec : 𝑋 =
[ 𝑖𝑠𝑑𝑖𝑠𝑞Ø𝑟𝑑
∅𝑟𝑞]
𝑈 = [𝒱𝑠𝑑
𝒱𝑠𝑞]
𝐴 =
[ −
1
𝐿𝑠.𝜎(𝑅𝑠 +
𝐿𝑚2
𝑇𝑟.𝐿𝑟)
−𝜔𝑠𝐿𝑚
𝑇𝑟
0
𝜔𝑠
−1
𝐿𝑠.𝜎(𝑅𝑠 +
𝐿𝑚2
𝑇𝑟.𝐿𝑟)
0𝐿𝑚
𝑇𝑟
𝐿𝑚
𝑇𝑟.𝐿𝑠.𝐿𝑟𝜎
−𝐿𝑚
𝐿𝑠.𝐿𝑟𝜎𝜔𝑟
−1
𝑇𝑟
−(𝜔𝑠 − 𝜔𝑟)
𝐿𝑚
𝐿𝑠.𝐿𝑟𝜎𝜔𝑟
𝐿𝑚
𝑇𝑟.𝐿𝑠.𝐿𝑟𝜎
(𝜔𝑠 − 𝜔𝑟)
−1
𝑇𝑟 ]
;
𝐵 =1
𝐿𝑠.𝜎. [
1 00 10 00 0
]
La représentation d’état développé précédemment montre que la machine asynchrone
est un convertisseur électromécanique :
Au stator recevant des tensions comme grandeurs électriques et délivrant des courants.
Recevant une vitesse comme grandeur mécanique et délivrant un couple électromoteur.
Equation mécanique
L’équation électromécanique exprimée par :
𝘊𝑒𝑚 − 𝘊𝑟 = 𝐽𝑑
𝑑𝑡𝜔𝑟 + 𝐾𝑓 . 𝜔𝑟 (III.28)
Avec :
𝐽 : le moment d’inertie total ramené sur l’arbre du moteur ;
𝐾𝑓 : le coefficient de frottement visqueux ;

Modélisation et Commande Vectorielle de la Machine Asynchrone
52
𝘊𝑒𝑚 : le couple électromagnétique délivré par le moteur ;
𝘊𝑟 : le couple résistant appliqué sur l’arbre du moteur.
Cette relation montre que le contrôle de la vitesse passe par le contrôle du couple.
Couple électromagnétique
Le couple électromagnétique délivré par la machine est obtenu à partir de la dérivé de
l’énergie mécanique par rapport à la position électrique du rotor, et donné par l’expression
suivante :
𝘊𝑒𝑚 = 𝑃.𝐿𝑚
𝐿𝑟. (Ø𝑟𝑑. 𝑖𝑠𝑞 − Ø𝑟𝑞 . 𝑖𝑠𝑑) (III.29)
On constate que l’équation du couple électromagnétique n’est pas linéaire, à cause
de produit des composantes du courant et du flux (couplage), qui induisent une forte
interaction entre les deux axes.
III.2.7.Modèle de la machine asynchrone dans le repère (𝛂, 𝛃)
À partir des définitions précédentes, les équations électriques de la machine sont
réécrites comme suit:
𝑑
𝑑𝑡𝑖𝑠𝛼 = −(
𝑅𝑠
𝐿𝑠.𝜎+
( 1 − 𝜎 )
𝑇𝑟.𝜎 ) . 𝑖𝑠𝛼 +
(1 − 𝜎 )
𝑇𝑟.𝐿𝑚.𝜎. ∅𝑟𝛼 +
(1−𝜎)
𝐿𝑚.𝜎 . 𝜔𝑟 . ∅𝑟𝛽 +
1
𝐿𝑠.𝜎 . 𝒱𝑠𝛼
𝑑
𝑑𝑡𝑖𝑠𝛽 = −(
𝑅𝑠
𝐿𝑠 . 𝜎+
(1 − 𝜎)
𝑇𝑟 . 𝜎) . 𝑖𝑠𝛽 −
(1 − 𝜎)
𝐿𝑚. 𝜎. 𝜔𝑟 . ∅𝑟𝛼 +
(1 − 𝜎)
𝑇𝑟 . 𝐿𝑚. 𝜎. ∅𝑟𝛽 +
1
𝐿𝑠. 𝜎 . 𝒱𝑠𝛽
𝑑
𝑑𝑡∅𝑟𝛼 =
𝐿𝑚
𝑇𝑟. 𝑖𝑠𝛼 −
1
𝑇𝑟. ∅𝑟𝛼 − 𝜔𝑟 . ∅𝑟𝛽 (III.30)
𝑑
𝑑𝑡∅𝑟𝛽 =
𝐿𝑚
𝑇𝑟. 𝑖𝑠𝛽 + 𝜔𝑟 . ∅𝑟𝛼 −
1
𝑇𝑟. ∅𝑟𝛽
III.3. Alimentation de La Machine Asynchrone
II.3.1.Introduction
La figure III.3 présente une machine asynchrone sans liaison de neutre alimentée par
un onduleur de tension à trois bras comprenant chacun deux cellules de commutation, chaque
cellule est composée d’un interrupteur, commandé à l’amorçage et au blocage et d’une diode
antiparallèle.
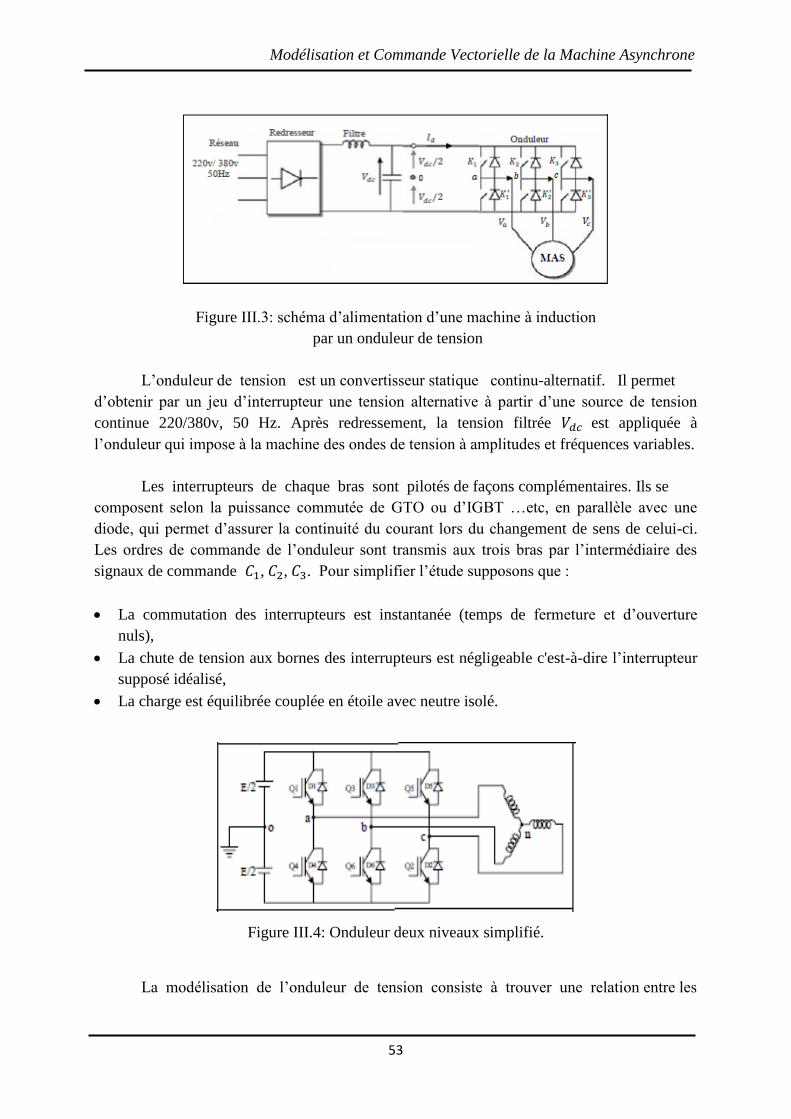
Modélisation et Commande Vectorielle de la Machine Asynchrone
53
Figure III.3: schéma d’alimentation d’une machine à induction
par un onduleur de tension
L’onduleur de tension est un convertisseur statique continu-alternatif. Il permet
d’obtenir par un jeu d’interrupteur une tension alternative à partir d’une source de tension
continue 220/380v, 50 Hz. Après redressement, la tension filtrée 𝑉𝑑𝑐 est appliquée à
l’onduleur qui impose à la machine des ondes de tension à amplitudes et fréquences variables.
Les interrupteurs de chaque bras sont pilotés de façons complémentaires. Ils se
composent selon la puissance commutée de GTO ou d’IGBT …etc, en parallèle avec une
diode, qui permet d’assurer la continuité du courant lors du changement de sens de celui-ci.
Les ordres de commande de l’onduleur sont transmis aux trois bras par l’intermédiaire des
signaux de commande 𝐶1, 𝐶2, 𝐶3. Pour simplifier l’étude supposons que :
La commutation des interrupteurs est instantanée (temps de fermeture et d’ouverture
nuls),
La chute de tension aux bornes des interrupteurs est négligeable c'est-à-dire l’interrupteur
supposé idéalisé,
La charge est équilibrée couplée en étoile avec neutre isolé.
Figure III.4: Onduleur deux niveaux simplifié.
La modélisation de l’onduleur de tension consiste à trouver une relation entre les

Modélisation et Commande Vectorielle de la Machine Asynchrone
54
grandeurs de commande des transistors et les grandeurs électriques de la machine
asynchrone [45].
On a: Van
+Vbn
+Vcn
=0 (III.31)
Les tensions composées sont obtenues à partir des sorties de l’onduleur :
𝑉𝑎𝑛 = 𝑉𝑎0 + 𝑉0𝑛.
𝑉𝑏𝑛 = 𝑉𝑏0 + 𝑉0𝑛 (III.32)
𝑉𝑐𝑛 = 𝑉𝑐0 + 𝑉0𝑛.
En faisant la somme des équations du système précédent, on obtient :
𝑉𝑎𝑛+𝑉𝑏𝑛+𝑉𝑐𝑛 = 𝑉𝑎0 + 𝑉𝑏0 + 𝑉𝑐0 + 3. 𝑉0𝑛 = 0. (III.33)
𝑉𝑎0 + 𝑉𝑏0 + 𝑉𝑐0 = −3. 𝑉0𝑛 (III.34)
Donc :
𝑉0𝑛 = −1
3(𝑉𝑎0 + 𝑉𝑏0 + 𝑉𝑐0) (III.35)
On remplace (III.35) dans (III.32) on trouve :
[𝑉𝑎𝑛
𝑉𝑏𝑛
𝑉𝑐𝑛
] =1
3. [
2 −1 −1−1 2 −1−1 −1 2
] . [
𝑉𝑎0
𝑉𝑏0
𝑉𝑐0
] (III.36)
Selon la condition des interrupteurs statiques ( 𝑆𝑘 est égale à 1 si l’interrupteur est
fermé et 0 si non, avec 𝑘 = 𝑎, 𝑏, 𝑐 ), les tensions de branches 𝑉𝑘0peuvent être exprimées en
fonction des interrupteurs de 𝑆𝑘 par :
𝑉𝑘0 = (2. 𝑆𝑘 − 1). 𝐸/2 (III.37)
En utilisant l’expression (III.37) dans le système (III.36), on déduit les tensions de sortie de
phase de l’onduleur comme suit :
[𝑉𝑎𝑛
𝑉𝑏𝑛
𝑉𝑐𝑛
] =𝐸
6[
2 −1 −1−1 2 −1−1 −1 2
] [
2. 𝑆𝑎 − 12. 𝑆𝑏 − 12. 𝑆𝑑 − 1
] (III.38)
Après simplification, le modèle mathématique de l’onduleur à deux niveaux de tensions est
donné par l’équation (III.38), ou la condition des interrupteurs statiques 𝑆𝑘 (𝑘 = 𝑎, 𝑏, 𝑐 )
prennent la valeur 1 si l’interrupteur est fermé, et la valeur 0 si l’interrupteur est ouvert.
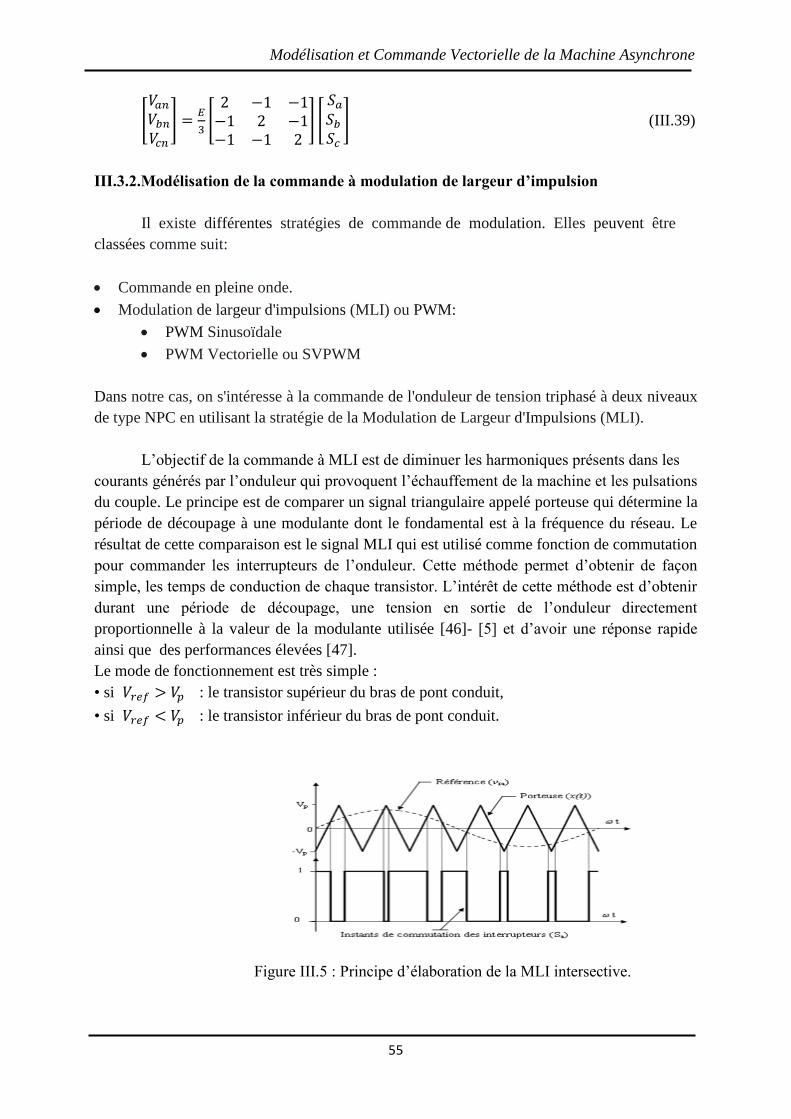
Modélisation et Commande Vectorielle de la Machine Asynchrone
55
[
𝑉𝑎𝑛
𝑉𝑏𝑛
𝑉𝑐𝑛
] =𝐸
3[
2 −1 −1−1 2 −1−1 −1 2
] [
𝑆𝑎
𝑆𝑏
𝑆𝑐
] (III.39)
III.3.2.Modélisation de la commande à modulation de largeur d’impulsion
Il existe différentes stratégies de commande de modulation. Elles peuvent être
classées comme suit:
Commande en pleine onde.
Modulation de largeur d'impulsions (MLI) ou PWM:
PWM Sinusoïdale
PWM Vectorielle ou SVPWM
Dans notre cas, on s'intéresse à la commande de l'onduleur de tension triphasé à deux niveaux
de type NPC en utilisant la stratégie de la Modulation de Largeur d'Impulsions (MLI).
L’objectif de la commande à MLI est de diminuer les harmoniques présents dans les
courants générés par l’onduleur qui provoquent l’échauffement de la machine et les pulsations
du couple. Le principe est de comparer un signal triangulaire appelé porteuse qui détermine la
période de découpage à une modulante dont le fondamental est à la fréquence du réseau. Le
résultat de cette comparaison est le signal MLI qui est utilisé comme fonction de commutation
pour commander les interrupteurs de l’onduleur. Cette méthode permet d’obtenir de façon
simple, les temps de conduction de chaque transistor. L’intérêt de cette méthode est d’obtenir
durant une période de découpage, une tension en sortie de l’onduleur directement
proportionnelle à la valeur de la modulante utilisée [46]- [5] et d’avoir une réponse rapide
ainsi que des performances élevées [47].
Le mode de fonctionnement est très simple :
• si 𝑉𝑟𝑒𝑓 > 𝑉𝑝 : le transistor supérieur du bras de pont conduit,
• si 𝑉𝑟𝑒𝑓 < 𝑉𝑝 : le transistor inférieur du bras de pont conduit.
Figure III.5 : Principe d’élaboration de la MLI intersective.

Modélisation et Commande Vectorielle de la Machine Asynchrone
56
Cette stratégie est caractérisée par deux paramètres :
l’indice de modulation m
𝑚 =𝐹𝑟é𝑞𝑢𝑒𝑛𝑐𝑒 𝑑𝑒 𝑙𝑎 𝑝𝑜𝑟𝑡𝑒𝑢𝑠𝑒
𝐹𝑟é𝑞𝑢𝑒𝑛𝑐𝑒 𝑑𝑒 𝑙𝑎 𝑚𝑜𝑑𝑢𝑙𝑎𝑛𝑡𝑒=
𝑓𝑃
𝑓 (III.40)
le taux de modulation r:
𝑟 =𝐴𝑚𝑝𝑙𝑖𝑡𝑢𝑑𝑒 𝑑𝑒 𝑙𝑎 𝑡𝑒𝑛𝑠𝑖𝑜𝑛 𝑑𝑒 𝑟é𝑓é𝑟𝑒𝑛𝑐𝑒
𝑉𝑎𝑙𝑒𝑢𝑟 𝑑𝑒 𝑐𝑟é𝑡𝑒 𝑑𝑒 𝑙𝑎 𝑝𝑜𝑟𝑡𝑒𝑢𝑠𝑒=
𝑉𝑟𝑒𝑓
𝑉𝑃 (III.41)
La modulante est définie comme suit:
𝛽 (t) = 𝑉𝑟𝑒𝑓. sin (𝚠. t + φ) (III.42)
L’équation de la porteuse sur une période est donnée par :
𝑉𝑃 =
4.𝑡
𝑇𝑃− (4. 𝑛 + 1) 𝑠𝑖 𝑡 ∊ (𝑛. 𝑇𝑃,
𝑛+1
2. 𝑇𝑃)
−4.𝑡
𝑇𝑃+ (4. 𝑛 + 3) 𝑠𝑖 𝑡 ∊ (
𝑛+1
2. 𝑇𝑃, (𝑛 + 1). 𝑇𝑃)
(III.43)
Avec : 𝑇𝑃 =1
𝑓𝑃 (III.44)
L’amplitude de la modulante « 𝑉𝑟𝑒𝑓» détermine la durée de conduction minimale des
interrupteurs de puissance; dont le fonctionnement normal ne doit pas dépasser l’amplitude
de la porteuse; cette amplitude de la modulante est limitée.
L’indice de modulation « m », défini par l’équation (III.40), permet de fixer la fréquence de
commutation (ou fréquence de découpage) des interrupteurs de puissance.
Si m = 1, on retrouve un cas de fonctionnement proche de la commande en pleine onde.
Le choix d’une valeur de m élevée s’impose pour que le contenu harmonique du
courant soit repoussé vers les hautes fréquences. Il faut cependant bien noter qu’il n’est pas
possible d’augmenter la valeur de m indéfiniment. En effet, les interrupteurs de puissance ont
un temps de mise en et hors conduction limité. De plus, les pertes par commutation
augmentent avec la fréquence de découpage. En règle générale, plus l’onduleur est de faible
puissance et plus sa fréquence de commutation peut être importante.
III.4. Commande Vectorielle de la Machine Asynchrone
Les moteurs asynchrones alimentés par onduleur de tension, permettent actuellement
d’atteindre des performances statique et dynamique très élevées grâce à l’emploi de stratégies
évoluées de pilotage du moteur, comme la commande vectorielle [34].

Modélisation et Commande Vectorielle de la Machine Asynchrone
57
III.4.1. La commande vectorielle
La commande vectorielle du flux rotorique du moteur asynchrone est une
intelligente transposition au moteur asynchrone [1]. Cette technique a été découverte par
Blaschke au début des années 1970, devenue un standard incontournable qui a débouché sur
de larges gammes industrielles dès le début des années 1990. Le contrôle vectoriel propose
un découplage entre l’axe « d » qui est l’axe du flux rotorique et l’axe « q » qui est l’axe du
couple. Ce choix permet d’obtenir des fonctionnements de la machine asynchrone
comparables à ceux de la machine à courant continu.
III.4.2. La commande vectorielle indirecte à flux rotorique orienté
Dans le cas de la commande indirecte, le flux n’est pas régulé (c’est à dire ni mesuré,
ni estimé) [48]. Celui-ci est donné par la consigne et orienté à partir de l'angle 𝜃𝑆 qui est
obtenu à partir de la pulsation statorique 𝜔𝑆, qui est la somme de la pulsation rotorique 𝜔𝑟
estimée et la pulsation mécanique P.Ω mesurée. Cette méthode élimine donc l’utilisation
d’un capteur ou d’un observateur du flux.
III.4.2.1. Mise en équation de la commande
[𝒱𝑠𝑑 ] = 𝑅𝑠 𝑖𝑠𝑑 +𝑑
𝑑𝑡∅𝑠𝑑 − 𝜔𝑠Ø𝑠𝑞 (III.45)
[𝒱𝑠𝑞 ] = 𝑅𝑠 𝑖𝑠𝑞 +𝑑
𝑑𝑡∅𝑠𝑞 + 𝜔𝑠Ø𝑠𝑑
0 = 𝑅𝑟 𝑖𝑟𝑑 +𝑑
𝑑𝑡∅𝑟𝑑 − (𝜔𝑠 − 𝜔𝑟). Ø𝑟𝑞 (III.46)
0 = 𝑅𝑟 𝑖𝑟𝑞 +𝑑
𝑑𝑡∅𝑟𝑞 + (𝜔𝑠 − 𝜔𝑟). Ø𝑟𝑑
L'orientation du flux magnétique selon l’axe direct conduit à l'annulation de sa
composante en quadrature, on obtient donc:
∅𝑟𝑑 = ∅ (III.47)
∅𝑟𝑞 = 0
Les équations des tensions rotoriques (III.46) et des flux statoriques (III.25)
deviennent :
0 = 𝑅𝑟 𝑖𝑟𝑑 +𝑑
𝑑𝑡∅𝑟𝑑
0 = 𝑅𝑟 𝑖𝑟𝑞 + 𝜔𝑟Ø𝑟𝑑
∅𝑠𝑑 = 𝐿𝑠 𝜎. 𝑖𝑠𝑑 +𝐿𝑚
𝐿𝑟. ∅𝑟𝑑 (III.48)
∅𝑠𝑞
= 𝐿𝑠 𝜎. 𝑖𝑠𝑞

Modélisation et Commande Vectorielle de la Machine Asynchrone
58
On remplace (III.48) dans (III.45) on trouve :
𝒱𝑠𝑑 = 𝑅𝑠. 𝑖𝑠𝑑 + 𝐿𝑠 . 𝜎.𝑑𝑖𝑠𝑑
𝑑𝑡+
𝐿𝑚
𝐿𝑟.
𝑑
𝑑𝑡∅𝑟𝑑 − 𝜔𝑠. 𝐿𝑠 . 𝜎. 𝑖𝑠𝑞
(III.49)
𝒱𝑠𝑞 = 𝑅𝑠. 𝑖𝑠𝑞 + 𝐿𝑠 . 𝜎.𝑑𝑖𝑠𝑞
𝑑𝑡+ 𝜔𝑟 .
𝐿𝑚
𝐿𝑟. ∅𝑟𝑑 + 𝜔𝑠. 𝐿𝑠 . 𝜎. 𝑖𝑠𝑑
Les équations de la machine sont résumées comme suit :
𝒱𝑠𝑑 = (𝑅𝑠 +𝑅𝑟.𝐿𝑚
2
𝐿𝑟2 ) . 𝑖𝑠𝑑 + 𝐿𝑠 . 𝜎.
𝑑𝑖𝑠𝑑
𝑑𝑡− 𝜔𝑠. 𝐿𝑠 . 𝜎. 𝑖𝑠𝑞 −
𝑅𝑟.𝐿𝑚
𝐿𝑟2 . ∅𝑟𝑑
𝒱𝑠𝑞 = (𝑅𝑠 +𝑅𝑟 . 𝐿𝑚
2
𝐿𝑟2
) . 𝑖𝑠𝑞 + 𝐿𝑠 . 𝜎.𝑑𝑖𝑠𝑞
𝑑𝑡+ 𝜔𝑠. 𝐿𝑠 . 𝜎. 𝑖𝑠𝑑 + 𝜔𝑟 .
𝐿𝑚
𝐿𝑟. ∅𝑟𝑑
𝜔𝑠 = 𝑝.𝛺 +𝐿𝑚
𝑇𝑟.
𝑖𝑠𝑞
∅𝑟𝑑 (III.50)
𝑇𝑟 .𝑑∅𝑟𝑑
𝑑𝑡+ ∅𝑟𝑑 = 𝐿𝑚. 𝑖𝑠𝑑
𝘊𝑒𝑚 = 𝑃.𝐿𝑚
𝐿𝑟. Ø𝑟𝑑. 𝑖𝑠𝑞
𝐽.𝑑
𝑑𝑡𝜔𝑟 = 𝘊𝑒𝑚 − 𝐾𝑓 . 𝜔𝑟 − 𝘤𝑟
On a : ∅𝑟𝑞 = 0 , ∅𝑟𝑑 = ∅𝑟
Donc on a le système suivant [49]-[50]:
𝑑
𝑑𝑡𝑖𝑠𝑑 =
1
𝜎. 𝐿𝑠[−(𝑅𝑠 +
𝐿𝑚2
𝐿𝑟 . 𝑇𝑟 ) . 𝑖𝑠𝑑 + 𝜔𝑠 . 𝜎. 𝐿𝑠 . 𝑖𝑠𝑞 +
𝐿𝑚
𝐿𝑟 . 𝑇𝑟Ø𝑟 + 𝒱𝑠𝑑]
𝑑
𝑑𝑡𝑖𝑠𝑞 =
1
𝜎. 𝐿𝑠[−𝜔𝑠 . 𝜎. 𝐿𝑠 . 𝑖𝑠𝑑 − (𝑅𝑠 +
𝐿𝑚2
𝐿𝑟 . 𝑇𝑟 ) . 𝑖𝑠𝑞 −
𝐿𝑚
𝐿𝑟. 𝜔𝑟 . Ø𝑟 + 𝒱𝑠𝑞]
𝑑
𝑑𝑡∅𝑟 =
𝐿𝑚
𝑇𝑟. 𝑖𝑠𝑑 −
1
𝑇𝑟. Ø𝑟 (III.51)
𝑑
𝑑𝑡𝜔𝑟 =
𝑃2. 𝐿𝑚
𝐿𝑟 . 𝐽. (𝑖𝑠𝑞 . Ø𝑟) −
𝐾𝑓
𝐽. 𝜔𝑟 −
𝑃
𝐽. 𝘤𝑟
III.4.2.2. Estimation de ωS et de θS
A partir de la relation (III.50) on trouve :
𝜔𝑠 = 𝑝.𝛺 +𝐿𝑚
𝑇𝑟.
𝑖𝑠𝑞
∅𝑟𝑑 = 𝜔𝑟 +
𝐿𝑚
𝑇𝑟.
𝑖𝑠𝑞
∅𝑟𝑑 (III.52)

Modélisation et Commande Vectorielle de la Machine Asynchrone
59
Avec :
𝜃𝑠 = ∫𝜔𝑠 . 𝑑𝑡
III.4.3. Structure de la commande FOC ( Field Oriented Control )
𝐶𝑒𝑚∗ 𝒱𝑠𝑑
∗
𝒱𝑠𝑞∗
∅𝑟∗ 𝜔𝑠
∗
Figure III.6: Schéma bloc de la commande F.O.C
D’après la figure III.6, le bloc F.O.C (Field Oriented Control) possède deux entrées
(𝐶𝑒𝑚∗ , ∅𝑟
∗ ) et trois sorties (𝒱𝑠𝑑∗ , 𝒱𝑠𝑞
∗ , 𝜔𝑠∗ ). On considère que le flux rotoriqure et le couple
électromagnétique pour le régime statique sont maintenus constants et égaux à leurs valeurs
de référence.
𝐶𝑒𝑚∗ = 𝑐𝑜𝑛𝑠𝑡.
∅𝑟∗ = 𝑐𝑜𝑛𝑠𝑡.
On déduit les équations de 𝒱𝑠𝑑∗ , 𝒱𝑠𝑞
∗ 𝑒𝑡 𝜔𝑠∗
𝐶𝑒𝑚∗ = 𝑃.
𝐿𝑚
𝐿𝑟. ∅𝑟
∗ . 𝑖𝑠𝑞∗ (III.53)
𝑑
𝑑𝑡∅𝑟 =
𝐿𝑚
𝑇𝑟. 𝑖𝑠𝑑
∗ −1
𝑇𝑟. ∅𝑟
∗ = 0
𝑖𝑠𝑞∗ =
𝐶𝑒𝑚∗ .𝐿𝑟
𝑃.𝐿𝑚.∅𝑟∗ (III.54)
𝑖𝑠𝑑∗ =
∅𝑟∗
𝐿𝑚
On a : 𝐶𝑒𝑚∗ et ∅𝑟
∗ des constantes; alors les courants 𝑖𝑠𝑑∗ et 𝑖𝑠𝑞
∗ sont aussi des constantes
Alors : 𝑑
𝑑𝑡𝑖𝑠𝑑∗ = 0 et
𝑑
𝑑𝑡𝑖𝑠𝑞∗ = 0, donc on aura :
𝑑
𝑑𝑡𝑖𝑠𝑑∗ =
1
𝜎.𝐿𝑠[− (𝑅𝑠 +
𝐿𝑚2
𝐿𝑟.𝑇𝑟 ) . 𝑖𝑠𝑑
∗ + 𝜔𝑠∗. 𝜎. 𝐿𝑠 . 𝑖𝑠𝑞
∗ +𝐿𝑚
𝐿𝑟.𝑇𝑟∅𝑟
∗ + 𝒱𝑠𝑑∗ ] = 0 (III.55)
𝑑
𝑑𝑡𝑖𝑠𝑞∗ =
1
𝜎. 𝐿𝑠[−𝜔𝑠
∗. 𝜎. 𝐿𝑠 . 𝑖𝑠𝑑∗ − (𝑅𝑠 +
𝐿𝑚2
𝐿𝑟 . 𝑇𝑟 ) . 𝑖𝑠𝑞
∗ −𝐿𝑚
𝐿𝑟. 𝜔𝑠
∗. ∅𝑟∗ + 𝒱𝑠𝑞
∗ ] = 0
F.O.C
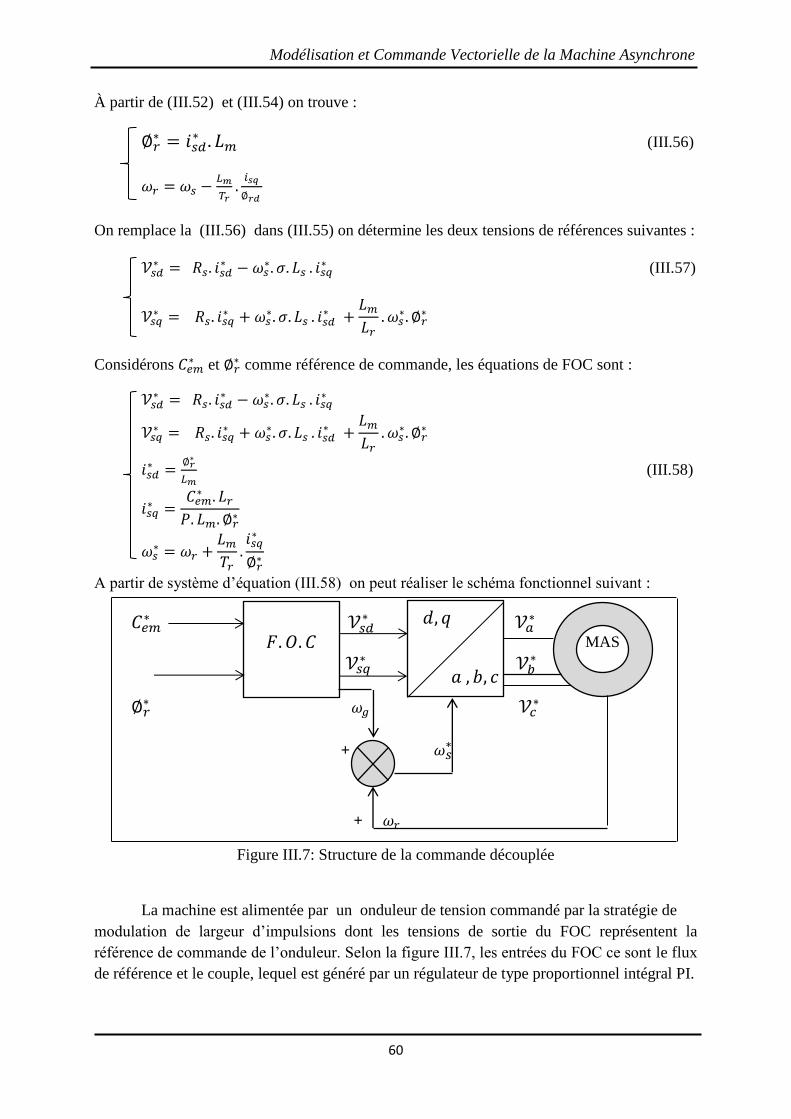
Modélisation et Commande Vectorielle de la Machine Asynchrone
60
À partir de (III.52) et (III.54) on trouve :
∅𝑟∗ = 𝑖𝑠𝑑
∗ . 𝐿𝑚 (III.56)
𝜔𝑟 = 𝜔𝑠 − 𝐿𝑚
𝑇𝑟.
𝑖𝑠𝑞
∅𝑟𝑑
On remplace la (III.56) dans (III.55) on détermine les deux tensions de références suivantes :
𝒱𝑠𝑑∗ = 𝑅𝑠. 𝑖𝑠𝑑
∗ − 𝜔𝑠∗. 𝜎. 𝐿𝑠 . 𝑖𝑠𝑞
∗ (III.57)
𝒱𝑠𝑞∗ = 𝑅𝑠. 𝑖𝑠𝑞
∗ + 𝜔𝑠∗. 𝜎. 𝐿𝑠 . 𝑖𝑠𝑑
∗ +𝐿𝑚
𝐿𝑟. 𝜔𝑠
∗. ∅𝑟∗
Considérons 𝐶𝑒𝑚∗ et ∅𝑟
∗ comme référence de commande, les équations de FOC sont :
𝒱𝑠𝑑∗ = 𝑅𝑠. 𝑖𝑠𝑑
∗ − 𝜔𝑠∗. 𝜎. 𝐿𝑠 . 𝑖𝑠𝑞
∗
𝒱𝑠𝑞∗ = 𝑅𝑠. 𝑖𝑠𝑞
∗ + 𝜔𝑠∗. 𝜎. 𝐿𝑠 . 𝑖𝑠𝑑
∗ +𝐿𝑚
𝐿𝑟. 𝜔𝑠
∗. ∅𝑟∗
𝑖𝑠𝑑∗ =
∅𝑟∗
𝐿𝑚 (III.58)
𝑖𝑠𝑞∗ =
𝐶𝑒𝑚∗ . 𝐿𝑟
𝑃. 𝐿𝑚. ∅𝑟∗
𝜔𝑠∗ = 𝜔𝑟 +
𝐿𝑚
𝑇𝑟.𝑖𝑠𝑞∗
∅𝑟∗
A partir de système d’équation (III.58) on peut réaliser le schéma fonctionnel suivant :
𝐶𝑒𝑚∗ 𝒱𝑠𝑑
∗ 𝒱𝑎∗
𝒱𝑠𝑞∗ 𝒱𝑏
∗
∅𝑟∗ 𝜔𝑔 𝒱𝑐
∗
+ 𝜔𝑠∗
+ 𝜔𝑟
Figure III.7: Structure de la commande découplée
La machine est alimentée par un onduleur de tension commandé par la stratégie de
modulation de largeur d’impulsions dont les tensions de sortie du FOC représentent la
référence de commande de l’onduleur. Selon la figure III.7, les entrées du FOC ce sont le flux
de référence et le couple, lequel est généré par un régulateur de type proportionnel intégral PI.
𝑑, 𝑞
𝑎 , 𝑏, 𝑐
MAS 𝐹.𝑂. 𝐶
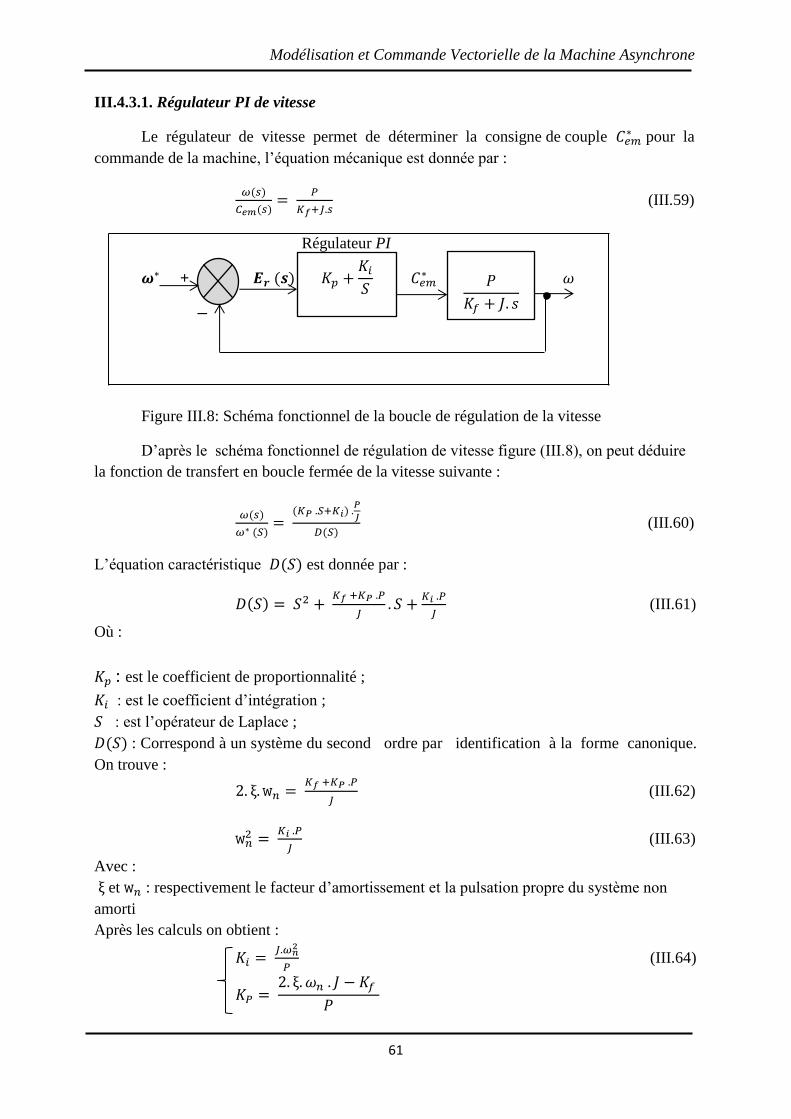
Modélisation et Commande Vectorielle de la Machine Asynchrone
61
III.4.3.1. Régulateur PI de vitesse
Le régulateur de vitesse permet de déterminer la consigne de couple 𝐶𝑒𝑚∗ pour la
commande de la machine, l’équation mécanique est donnée par :
𝜔(𝑠)
𝐶𝑒𝑚(𝑠)=
𝑃
𝐾𝑓+𝐽.𝑠 (III.59)
Régulateur PI
𝝎∗ + 𝑬𝒓 (𝒔) 𝐶𝑒𝑚∗ 𝜔
−
Figure III.8: Schéma fonctionnel de la boucle de régulation de la vitesse
D’après le schéma fonctionnel de régulation de vitesse figure (III.8), on peut déduire
la fonction de transfert en boucle fermée de la vitesse suivante :
𝜔(𝑠)
𝜔∗ (𝑆)=
(𝐾𝑃 .𝑆+𝐾𝑖) .𝑃
𝐽
𝐷(𝑆) (III.60)
L’équation caractéristique 𝐷(𝑆) est donnée par :
𝐷(𝑆) = 𝑆2 + 𝐾𝑓 +𝐾𝑃 .𝑃
𝐽. 𝑆 +
𝐾𝑖 .𝑃
𝐽 (III.61)
Où :
𝐾𝑝 : est le coefficient de proportionnalité ;
𝐾𝑖 : est le coefficient d’intégration ;
𝑆 : est l’opérateur de Laplace ;
𝐷(𝑆) : Correspond à un système du second ordre par identification à la forme canonique.
On trouve :
2. ξ. 𝚠𝑛 = 𝐾𝑓 +𝐾𝑃 .𝑃
𝐽 (III.62)
𝚠𝑛2 =
𝐾𝑖 .𝑃
𝐽 (III.63)
Avec :
ξ et 𝚠𝑛 : respectivement le facteur d’amortissement et la pulsation propre du système non
amorti
Après les calculs on obtient :
𝐾𝑖 = 𝐽.𝜔𝑛
2
𝑃 (III.64)
𝐾𝑃 = 2. ξ. 𝜔𝑛 . 𝐽 − 𝐾𝑓
𝑃
𝐾𝑝 +𝐾𝑖
𝑆 𝑃
𝐾𝑓 + 𝐽. 𝑠
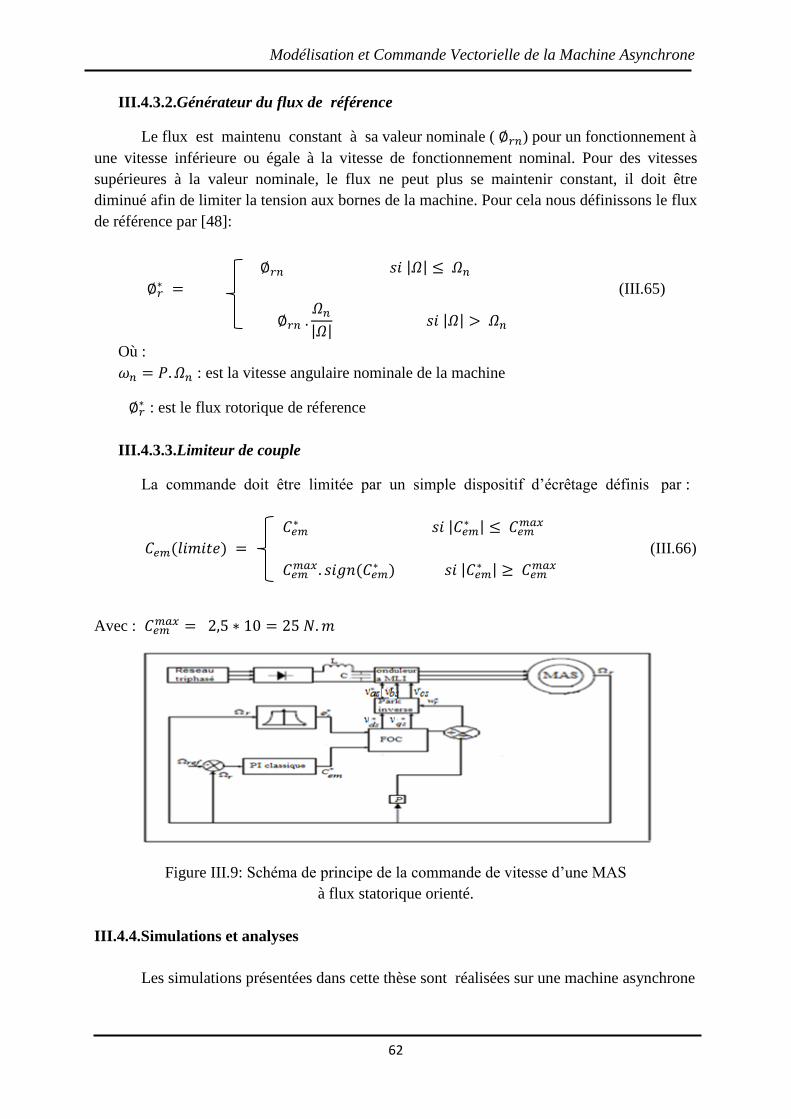
Modélisation et Commande Vectorielle de la Machine Asynchrone
62
III.4.3.2.Générateur du flux de référence
Le flux est maintenu constant à sa valeur nominale ( ∅𝑟𝑛) pour un fonctionnement à
une vitesse inférieure ou égale à la vitesse de fonctionnement nominal. Pour des vitesses
supérieures à la valeur nominale, le flux ne peut plus se maintenir constant, il doit être
diminué afin de limiter la tension aux bornes de la machine. Pour cela nous définissons le flux
de référence par [48]:
∅𝑟𝑛 𝑠𝑖 |𝛺| ≤ 𝛺𝑛
∅𝑟∗ = (III.65)
∅𝑟𝑛 .𝛺𝑛
|𝛺| 𝑠𝑖 |𝛺| > 𝛺𝑛
Où :
𝜔𝑛 = 𝑃.𝛺𝑛 : est la vitesse angulaire nominale de la machine
∅𝑟∗ : est le flux rotorique de réference
III.4.3.3.Limiteur de couple
La commande doit être limitée par un simple dispositif d’écrêtage définis par :
𝐶𝑒𝑚∗ 𝑠𝑖 |𝐶𝑒𝑚
∗ | ≤ 𝐶𝑒𝑚𝑚𝑎𝑥
𝐶𝑒𝑚(𝑙𝑖𝑚𝑖𝑡𝑒) = (III.66)
𝐶𝑒𝑚𝑚𝑎𝑥 . 𝑠𝑖𝑔𝑛(𝐶𝑒𝑚
∗ ) 𝑠𝑖 |𝐶𝑒𝑚∗ | ≥ 𝐶𝑒𝑚
𝑚𝑎𝑥
Avec : 𝐶𝑒𝑚𝑚𝑎𝑥 = 2,5 ∗ 10 = 25 𝑁.𝑚
Figure III.9: Schéma de principe de la commande de vitesse d’une MAS
à flux statorique orienté.
III.4.4.Simulations et analyses
Les simulations présentées dans cette thèse sont réalisées sur une machine asynchrone
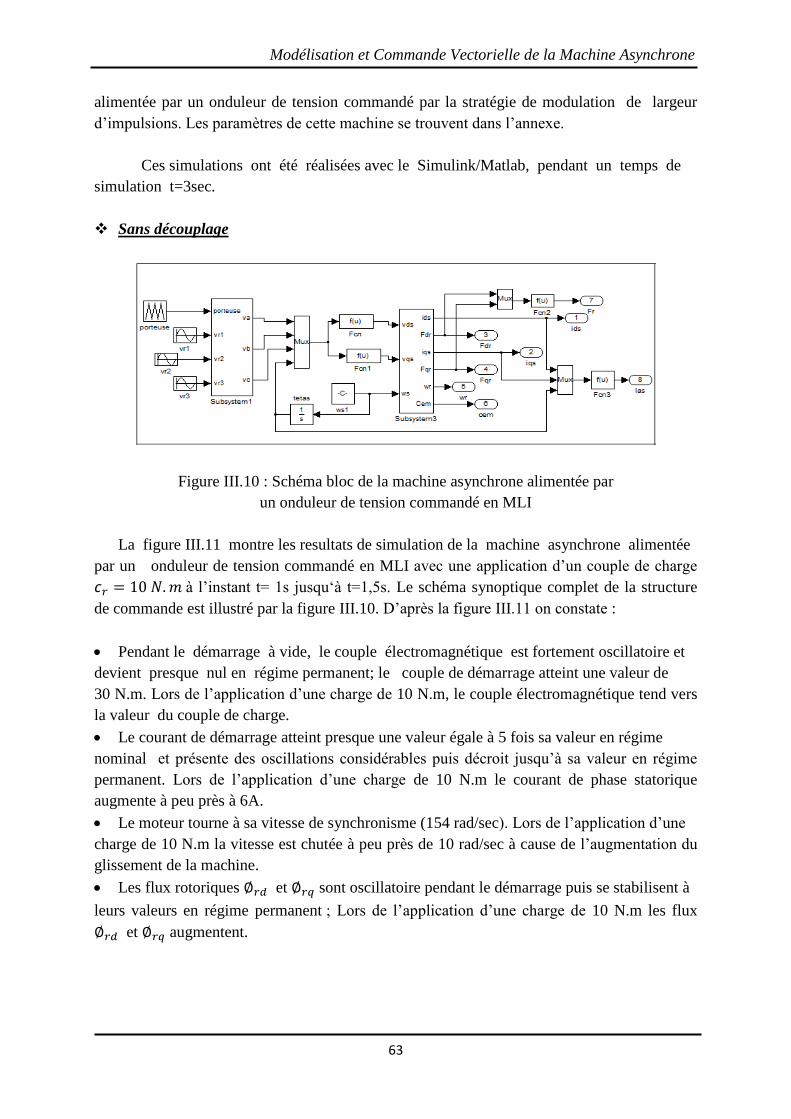
Modélisation et Commande Vectorielle de la Machine Asynchrone
63
alimentée par un onduleur de tension commandé par la stratégie de modulation de largeur
d’impulsions. Les paramètres de cette machine se trouvent dans l’annexe.
Ces simulations ont été réalisées avec le Simulink/Matlab, pendant un temps de
simulation t=3sec.
Sans découplage
Figure III.10 : Schéma bloc de la machine asynchrone alimentée par
un onduleur de tension commandé en MLI
La figure III.11 montre les resultats de simulation de la machine asynchrone alimentée
par un onduleur de tension commandé en MLI avec une application d’un couple de charge
𝘤𝑟 = 10 𝑁.𝑚 à l’instant t= 1s jusqu‘à t=1,5s. Le schéma synoptique complet de la structure
de commande est illustré par la figure III.10. D’après la figure III.11 on constate :
Pendant le démarrage à vide, le couple électromagnétique est fortement oscillatoire et
devient presque nul en régime permanent; le couple de démarrage atteint une valeur de
30 N.m. Lors de l’application d’une charge de 10 N.m, le couple électromagnétique tend vers
la valeur du couple de charge.
Le courant de démarrage atteint presque une valeur égale à 5 fois sa valeur en régime
nominal et présente des oscillations considérables puis décroit jusqu’à sa valeur en régime
permanent. Lors de l’application d’une charge de 10 N.m le courant de phase statorique
augmente à peu près à 6A.
Le moteur tourne à sa vitesse de synchronisme (154 rad/sec). Lors de l’application d’une
charge de 10 N.m la vitesse est chutée à peu près de 10 rad/sec à cause de l’augmentation du
glissement de la machine.
Les flux rotoriques ∅𝑟𝑑 et ∅𝑟𝑞 sont oscillatoire pendant le démarrage puis se stabilisent à
leurs valeurs en régime permanent ; Lors de l’application d’une charge de 10 N.m les flux
∅𝑟𝑑 et ∅𝑟𝑞 augmentent.
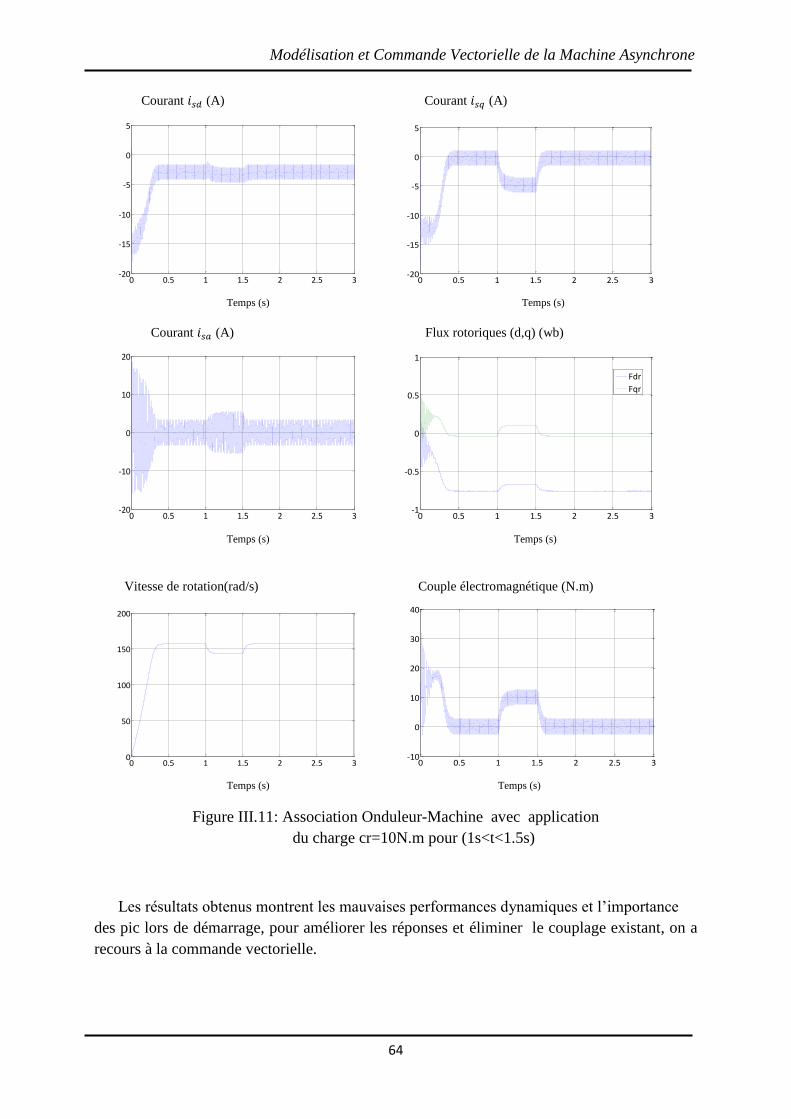
Modélisation et Commande Vectorielle de la Machine Asynchrone
64
Courant 𝑖𝑠𝑑 (A) Courant 𝑖𝑠𝑞 (A)
Temps (s) Temps (s)
Courant 𝑖𝑠𝑎 (A) Flux rotoriques (d,q) (wb)
Temps (s) Temps (s)
Vitesse de rotation(rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Figure III.11: Association Onduleur-Machine avec application
du charge cr=10N.m pour (1s<t<1.5s)
Les résultats obtenus montrent les mauvaises performances dynamiques et l’importance
des pic lors de démarrage, pour améliorer les réponses et éliminer le couplage existant, on a
recours à la commande vectorielle.
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
0 0.5 1 1.5 2 2.5 3-20
-10
0
10
20
0 0.5 1 1.5 2 2.5 3-1
-0.5
0
0.5
1
Fdr
Fqr
0 0.5 1 1.5 2 2.5 30
50
100
150
200
0 0.5 1 1.5 2 2.5 3-10
0
10
20
30
40

Modélisation et Commande Vectorielle de la Machine Asynchrone
65
Avec découplage et sans régulation
Figure III.12 : Structure de la commande en boucle ouverte
du couple et du flux
La figure III.12 présente la structure de commande de la machine asynchrone à flux
orienté sans régulation en boucle ouverte, les résultats de simulation de cette structure sont
représentés par la figure III.13. Dans ce cas la machine asynchrone est alimentée par un
onduleur de tension commandé en MLI, avec l’application d’un signal de référence du couple
électromagnétique variable pendant le temps et du flux rotorique de référence ∅𝑟∗ = 1𝑤.
On constate d’après la figure III.13 que le flux rotorique ∅𝑟𝑑 suit sa référence suivant
l’axe (d) avec le flux ∅𝑟𝑞 = 0, ce qui signifie que le découplage de la machine n’est pas
affecté par le changement de consigne du couple.
Le courant statorique 𝑖𝑠𝑞 suive bien le changement du couple ; les courbes des courants
𝑖𝑠𝑑 et 𝑖𝑠𝑞 montrent que les performances de poursuite des courants statoriques sont
satisfaisantes.
On constate aussi d’après les réponses des courants et du flux la diminution des pics et des
oscillations lors de démarrage.

Modélisation et Commande Vectorielle de la Machine Asynchrone
66
Couple électromagnétique (N.m)
Temps (s)
Courant 𝑖𝑠𝑑 (A) Courant 𝑖𝑠𝑞 (A)
Temps (s) Temps (s)
Flux rotoriques (d, q) (Wb) Flux rotorique ∅𝑟 (wb)
Temps (s) Temps (s)
Figure III.13 : Découplage avec variation du couple de référence
0 0.5 1 1.5 2 2.5 3-20
-10
0
10
20
cref
cem
0 0.5 1 1.5 2 2.5 3-2
0
2
4
6
8
10
0 0.5 1 1.5 2 2.5 3-10
-5
0
5
10
15
0 0.5 1 1.5 2 2.5 3-1
-0.5
0
0.5
1
1.5
2
Fdr
Fqr
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
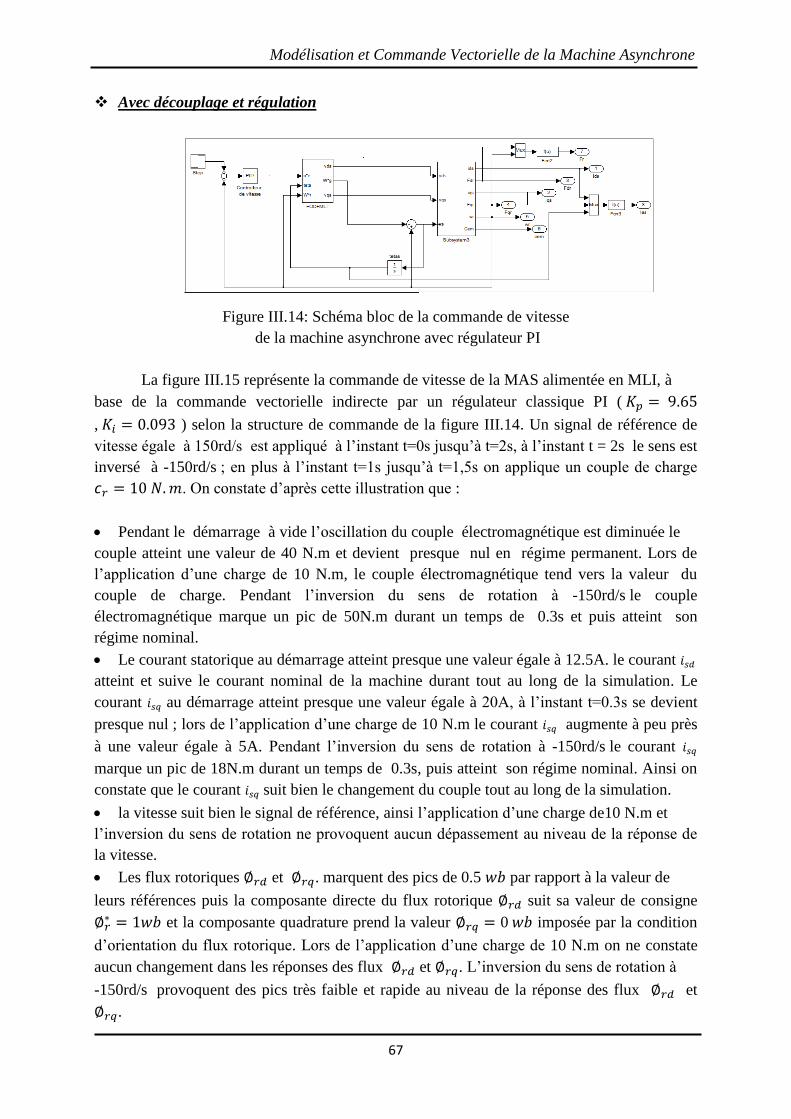
Modélisation et Commande Vectorielle de la Machine Asynchrone
67
Avec découplage et régulation
Figure III.14: Schéma bloc de la commande de vitesse
de la machine asynchrone avec régulateur PI
La figure III.15 représente la commande de vitesse de la MAS alimentée en MLI, à
base de la commande vectorielle indirecte par un régulateur classique PI ( 𝐾𝑝 = 9.65
, 𝐾𝑖 = 0.093 ) selon la structure de commande de la figure III.14. Un signal de référence de
vitesse égale à 150rd/s est appliqué à l’instant t=0s jusqu’à t=2s, à l’instant t = 2s le sens est
inversé à -150rd/s ; en plus à l’instant t=1s jusqu’à t=1,5s on applique un couple de charge
𝘤𝑟 = 10 𝑁.𝑚. On constate d’après cette illustration que :
Pendant le démarrage à vide l’oscillation du couple électromagnétique est diminuée le
couple atteint une valeur de 40 N.m et devient presque nul en régime permanent. Lors de
l’application d’une charge de 10 N.m, le couple électromagnétique tend vers la valeur du
couple de charge. Pendant l’inversion du sens de rotation à -150rd/s le couple
électromagnétique marque un pic de 50N.m durant un temps de 0.3s et puis atteint son
régime nominal.
Le courant statorique au démarrage atteint presque une valeur égale à 12.5A. le courant 𝑖𝑠𝑑
atteint et suive le courant nominal de la machine durant tout au long de la simulation. Le
courant 𝑖𝑠𝑞 au démarrage atteint presque une valeur égale à 20A, à l’instant t=0.3s se devient
presque nul ; lors de l’application d’une charge de 10 N.m le courant 𝑖𝑠𝑞 augmente à peu près
à une valeur égale à 5A. Pendant l’inversion du sens de rotation à -150rd/s le courant 𝑖𝑠𝑞
marque un pic de 18N.m durant un temps de 0.3s, puis atteint son régime nominal. Ainsi on
constate que le courant 𝑖𝑠𝑞 suit bien le changement du couple tout au long de la simulation.
la vitesse suit bien le signal de référence, ainsi l’application d’une charge de10 N.m et
l’inversion du sens de rotation ne provoquent aucun dépassement au niveau de la réponse de
la vitesse.
Les flux rotoriques ∅𝑟𝑑 et ∅𝑟𝑞. marquent des pics de 0.5 𝑤𝑏 par rapport à la valeur de
leurs références puis la composante directe du flux rotorique ∅𝑟𝑑 suit sa valeur de consigne
∅𝑟∗ = 1𝑤𝑏 et la composante quadrature prend la valeur ∅𝑟𝑞 = 0 𝑤𝑏 imposée par la condition
d’orientation du flux rotorique. Lors de l’application d’une charge de 10 N.m on ne constate
aucun changement dans les réponses des flux ∅𝑟𝑑 et ∅𝑟𝑞. L’inversion du sens de rotation à
-150rd/s provoquent des pics très faible et rapide au niveau de la réponse des flux ∅𝑟𝑑 et
∅𝑟𝑞.
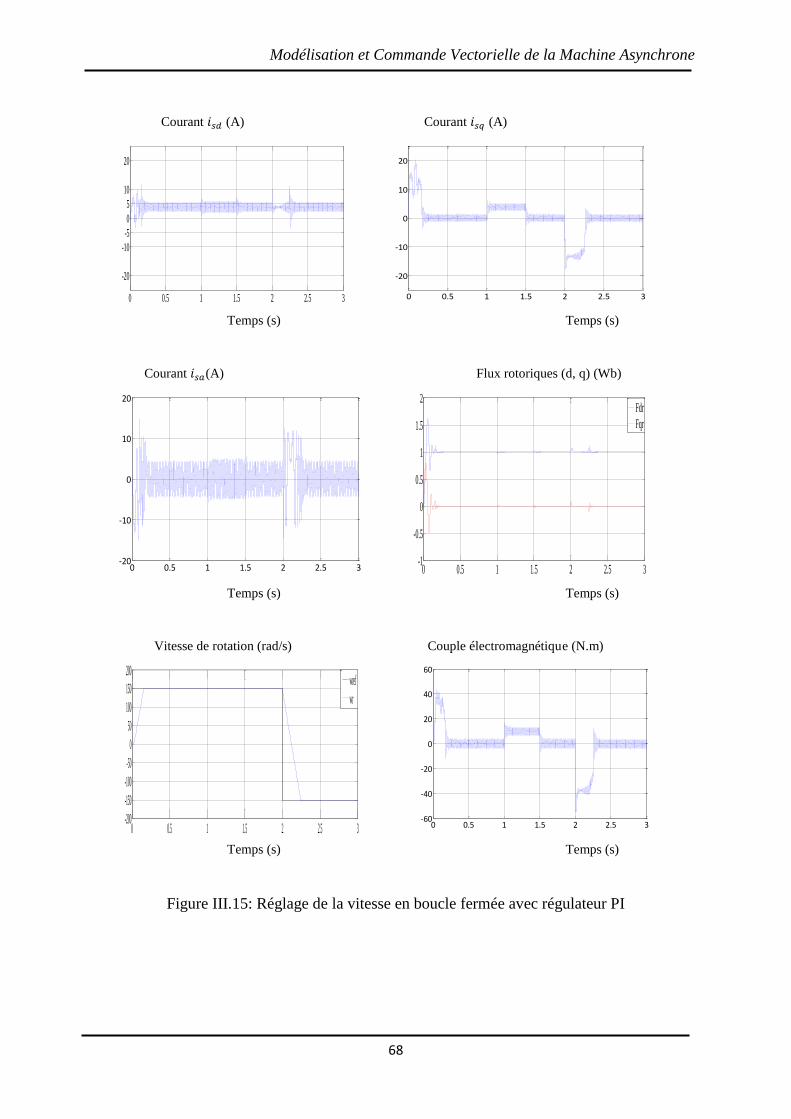
Modélisation et Commande Vectorielle de la Machine Asynchrone
68
Courant 𝑖𝑠𝑑 (A) Courant 𝑖𝑠𝑞 (A)
Temps (s) Temps (s)
Courant 𝑖𝑠𝑎(A) Flux rotoriques (d, q) (Wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Figure III.15: Réglage de la vitesse en boucle fermée avec régulateur PI
0 0.5 1 1.5 2 2.5 3
-20
-10
-5
0
5
10
20
0 0.5 1 1.5 2 2.5 3
-20
-10
0
10
20
0 0.5 1 1.5 2 2.5 3-20
-10
0
10
20
0 0.5 1 1.5 2 2.5 3-1
-0.5
0
0.5
1
1.5
2
Fdr
Fqr
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
wref
wr
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
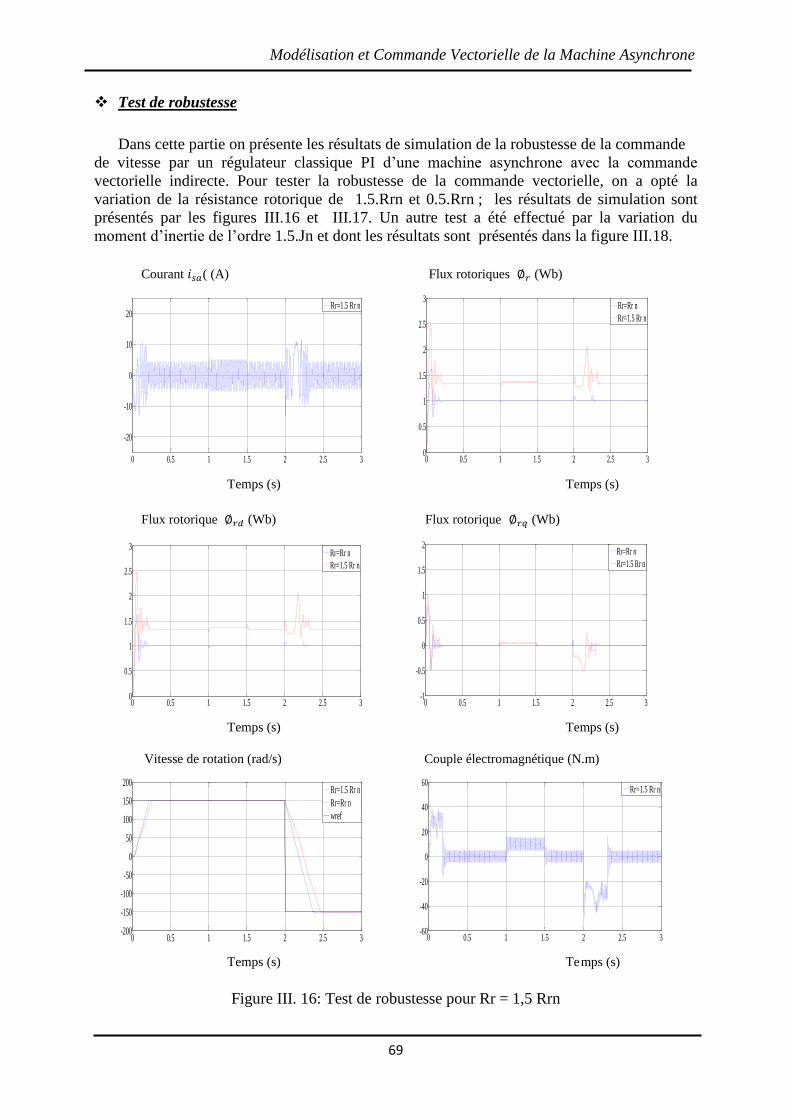
Modélisation et Commande Vectorielle de la Machine Asynchrone
69
Test de robustesse
Dans cette partie on présente les résultats de simulation de la robustesse de la commande
de vitesse par un régulateur classique PI d’une machine asynchrone avec la commande
vectorielle indirecte. Pour tester la robustesse de la commande vectorielle, on a opté la
variation de la résistance rotorique de 1.5.Rrn et 0.5.Rrn ; les résultats de simulation sont
présentés par les figures III.16 et III.17. Un autre test a été effectué par la variation du
moment d’inertie de l’ordre 1.5.Jn et dont les résultats sont présentés dans la figure III.18.
Courant 𝑖𝑠𝑎( (A) Flux rotoriques ∅𝑟 (Wb)
Temps (s) Temps (s)
Flux rotorique ∅𝑟𝑑 (Wb) Flux rotorique ∅𝑟𝑞 (Wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Figure III. 16: Test de robustesse pour Rr = 1,5 Rrn
0 0.5 1 1.5 2 2.5 3
-20
-10
0
10
20
Rr=1.5 Rr n
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Rr=Rr n
Rr=1.5 Rr n
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
Rr=Rr n
Rr=1.5 Rr n
0 0.5 1 1.5 2 2.5 3-1
-0.5
0
0.5
1
1.5
2
Rr=Rr n
Rr=1.5 Rr n
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
Rr=1.5 Rr n
Rr=Rr n
wref
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
Rr=1.5 Rr n

Modélisation et Commande Vectorielle de la Machine Asynchrone
70
Courant 𝑖𝑠𝑎( (A) Flux rotoriques ∅𝑟 (Wb)
Temps (s) Temps (s)
Flux rotorique ∅𝑟𝑑 (Wb) Flux rotorique ∅𝑟𝑞 (Wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Figure III.17: Test de robustesse pour Rr = 0.5 Rrn
0 0.5 1 1.5 2 2.5 3-30
-20
-10
0
10
20
30
Rr=0.5 Rr n
0 0.5 1 1.5 2 2.5 3-1
-0.5
0
0.5
1
1.5
2
Rr=Rr n
Rr=0.5Rr n
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
1.5
2
Rr=Rr n
Rr=0.5 Rr n
0 0.5 1 1.5 2 2.5 3-1
-0.5
0
0.5
1
Rr=Rr n
Rr=0.5 Rr n
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
Rr=Rr n
Rr=0.5 Rr n
Wref
0 0.5 1 1.5 2 2.5 3-80
-60
-40
-20
0
20
40
60
Rr=0.5Rr n

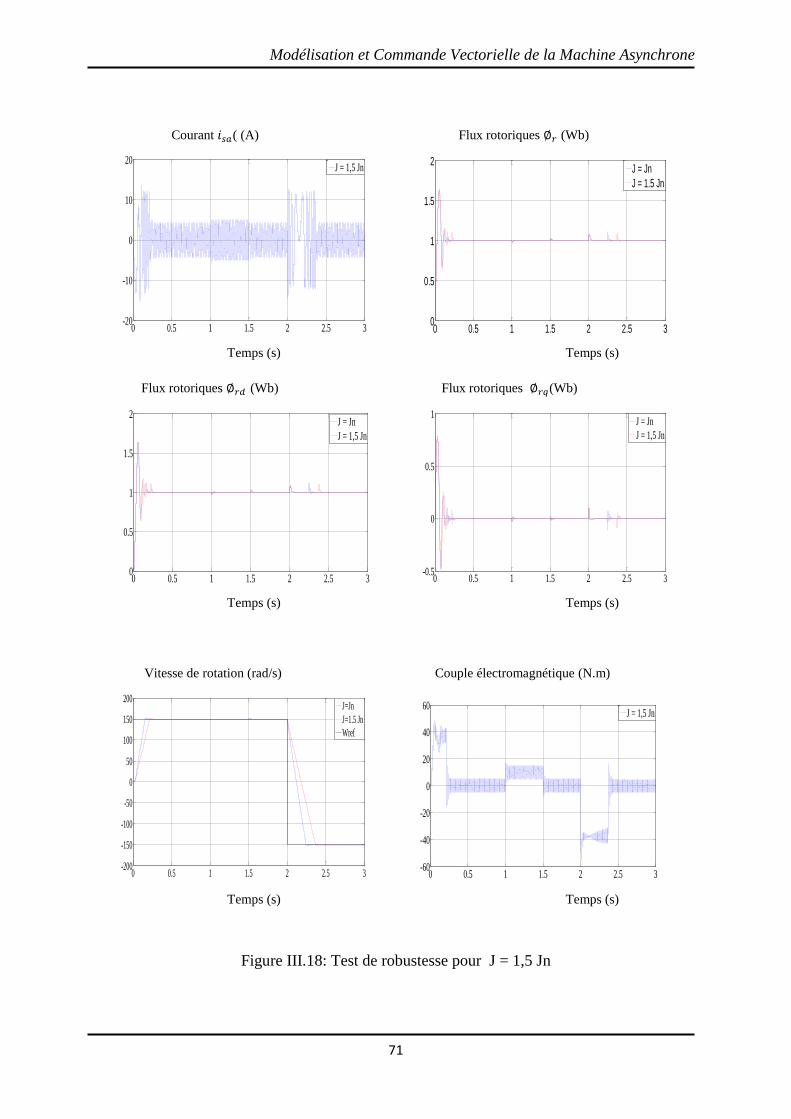
Modélisation et Commande Vectorielle de la Machine Asynchrone
71
Courant 𝑖𝑠𝑎( (A) Flux rotoriques ∅𝑟 (Wb)
Temps (s) Temps (s)
Flux rotoriques ∅𝑟𝑑 (Wb) Flux rotoriques ∅𝑟𝑞(Wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Figure III.18: Test de robustesse pour J = 1,5 Jn
0 0.5 1 1.5 2 2.5 3-20
-10
0
10
20
J = 1,5 Jn
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
J = Jn
J = 1.5 Jn
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
J = Jn
J = 1,5 Jn
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
J = Jn
J = 1,5 Jn
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
J=Jn
J=1.5 Jn
Wref
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
J = 1,5 Jn
Modélisation et Commande Vectorielle de la Machine Asynchrone
72
La variation paramétrique due à plusieurs phénomènes et perturbations à savoir [1]-[2] :
l’effet de la température sur les résistances en particulier la résistance rotorique.
la variation de la vitesse rotorique qui provoque l’évolution de l’effet de peau.
la variation de la charge qui peut affecter l’inertie du rotor et le facteur de frottement…etc.
Les réponses du système dans les figures III.16 et III.17 sont nettement moins bonnes
que la réponse du système représenté par la figure III.15 car :
Le temps de réponse de la vitesse est également augmenté, car pour un même courant
consommé durant la phase d’accélération, le couple développé n’atteint pas sa valeur
maximum.
L’amplitude du flux rotorique directe n’est pas à la valeur souhaitée ∅𝑟∗ = 1𝑤𝑏 en
présence d’erreurs paramétriques ; variation de la résistance rotorique. Le flux rotorique en
quadrature suit sa référence ∅𝑟𝑞 = 0 𝑤𝑏, mais représente une augmentation d’ordre 0.1 𝑤𝑏
lors de l’introduction du couple de charge et dans le cas d’augmentation de la résistance
rotorique, et vice versa dans le cas de diminution de celui-ci. Ainsi on remarque lors
l’inversion du sens de rotation à -150rad/s les composantes du flux représentent des pics
durant un temps à peu près égale à 0.35s.
La réponse du couple électromagnétique illustre des valeurs maximal au démarrage et
durant l’inversion du sens de rotation lors la diminution de la résistance rotorique arrive
jusqu’au 60N.m.
Ces dégradations sont dûes au fait que le couple électromagnétique dans la machine
n’est plus cré de façon optimale, le courant et le flux générant ce couple ne sont plus en
quadrature.
La figure III.18 représente la réponse du système dans le cas de variation du moment
d’inertie. D’après cette figure on constate que la variation du J n’influe pas sur la réponse de
la machine ; le flux rotorique ∅𝑟𝑑 garde sa position ∅𝑟∗ = 1𝑤𝑏, et le flux quadrature prend la
valeur ∅𝑟𝑞 = 0 𝑤𝑏 imposée par la condition d’orientation du flux rotorique, seulement lors
l’inversion du sens de rotation les deux composantes du flux représentent des pics très faibles
pendant un temps très court.
Le temps de réponse de la vitesse augmente. La variation du moment d’inertie J influe
donc sur la performance de rapidité du système.
Le couple électromagnétique au démarrage atteint une valeur égale à 50N.m puis prend
son régime nominal.
On conclut que les incertitudes sur les paramètres induisent des erreurs sur l’amplitude
et sur l’orientation du flux dans la machine asynchrone.

Modélisation et Commande Vectorielle de la Machine Asynchrone
73
III.5. CONCLUSION
Ce chapitre a traité la machine asynchrone du point de vue modélisation et
commande, en tenant compte des hypothèses simplificatrices. En appliquant la transformée
de PARK ; un modèle mathématique de la machine asynchrone, ainsi que la modélisation de
l’ensemble MAS-Onduleur ont été établis. A partir de ce dernier, on a confirmé les remarques
importantes sur les caractéristiques de cette machine non-linéaire et multivariable. La
stratégie de la commande vectorielle a permis quant à elle d’imposer à la machine asynchrone
des comportements semblables à celle de la machine à courant continu dans laquelle le
decouplage ne sont pas affectés par les variations du couple électromagnétique.
D’après les résultats de simulation, les incertitudes sur les paramètres induisent
l’instabilité de système quand l’erreur d’orientation de flux devient trop importante ; La
structure de régulation classique est donc peu robuste, ce qui nous conduit à recourir aux
techniques avancées qui font l’objet du chapitre suivant.

Application des Techniques Avancées
Chapitre IV
Application des Techniques
Avancées

Application des Techniques Avancées
74
Application des Techniques
Avancées
IV.1. Introduction
Ce chapitre est consacré à l’application des techniques avancées à la commande de
vitesse de la machine asynchrone. L’étude des performances de ces techniques par simulation
dans l’environnement MATLAB/Simulink sont présentés dans les mêmes conditions de
fonctionnement.
En premier lieu, on applique la commande neuronale qui nécessite l’apprentissage
du modèle avant l’application. On examinera ensuite la logique floue à la commande de la
MAS, en commençant par la description du contrôleur adopté avec démonstration de
validation de celui-ci. La combinaison de ces deux modèles du régulateur permet d’avoir un
régulateur ANFIS, lequel théoriquement demeure le plus performant, c’est ce que cette thèse
permet de vérifier. Enfin, on clôture ce travail par une comparaison entre les différentes
stratégies de commande appliquées dans cette thèse [54].
IV.2. Application de Réseaux de Neurones à La Commande de la MAS
Par un réseau de neurones de structure NNARX on construit un modèle non linéaire
qui prédit les valeurs de sorties [43](couple électromagnétique), à partir des informations
antérieures sur la vitesse rotorique et le couple ; ce modèle possède donc deux entrées et une
seule sortie [3].
IV.2.1. Développement du contrôleur neuronal
L’architecture neuronale proposée pour l’implémentation du contrôleur est un réseau
statique multicouche avec une seule couche cachée comme le montre la figure IV.1. Le
choix du nombre de neurones en couche cachée (𝑁𝐶=10) est déterminé à partir des
essais jusqu'à aboutir à une erreur acceptable entre la sortie du réseau et celle attendue.
La fonction d'activation des deux premières couches est la fonction sigmoïde, tandis
que la fonction linéaire est utilisée pour la couche de sortie. Son apprentissage est réalisé à
l'aide de l'algorithme de rétropropagation du gradient basé sur l’erreur; le choix de cette erreur
est lié à l'approximation désirée entre le réseau et le système [43].

Application des Techniques Avancées
75
Couche couche couche
d’entrée caché de sortie
𝑒
𝑈
∆𝑒
Figure IV.1 : Architecture neuronal proposée pour
l’implémentation du contrôleur.
𝑒 : l’erreur de vitesse.
∆𝑒 : la variation de l’erreur de vitesse.
𝑈 : le couple «électromagnétique.
IV.3.2.Résultats et Interprétation
La première étape dans cette application est la construction d’un réseau neuronal
statique multicouche. C’est à partir d’une base de données mesurées ou estimées que l’on
applique l'apprentissage hors ligne, pour déterminer les coefficients. Quand l’apprentissage
est terminé, on fait l’entraînement du réseau en utilisant la fonction ‘’train’’ et on simule les
résultats par la fonction ‘’Sim’’. Après apprentissage, on aboutit à une erreur de 0,000119, et
aux résultats présentés dans les figures IV.2 et IV.3 qui sont respectivement les figures
d’erreur d’apprentissage et de contrôle de validation du réseau.
Figure IV.2 : erreur d’apprentissage

Application des Techniques Avancées
76
Couple électromagnétique (N.m)
Temps (s)
Figure IV.3 : Contrôle de validation
La figure IV.4 présente la structure de la commande neuronale de la machine
asynchrone. Le contrôleur neuronal c’est un régulateur de vitesse au sein d’une commande
vectorielle de la machine asynchrone. La grandeur de sortie de ce régulateur de vitesse est le
couple électromagnétique 𝐶𝑒𝑚∗ .
Figure IV.4: Schéma bloc de la structure de réglage
de vitesse par un contrôleur neuronal.
Le résultat de simulation reporté sur la figure IV.5, illustre la réponse de
l’entraînement de la machine asynchrone avec application d’une consigne de vitesse de
150rd/s à l’instant t = 0 s jusqu’à t = 2s, et application d’un couple résistant 𝘤𝑟 = 10𝑁.𝑚
à l’instant t = 1s jusqu’à l’instant t = 1,5 s ; avec un changement du sens de vitesse à
l’instant t = 2 s.
D'après les résultats, on peut constater que le modèle neuronal imite bien le
comportement de la machine.
la vitesse suit bien le signal de référence, avec un temps de réponse égale à 0.22s ainsi
l’application d’une charge de10 N.m et l’inversion du sens de rotation ne provoquent aucun

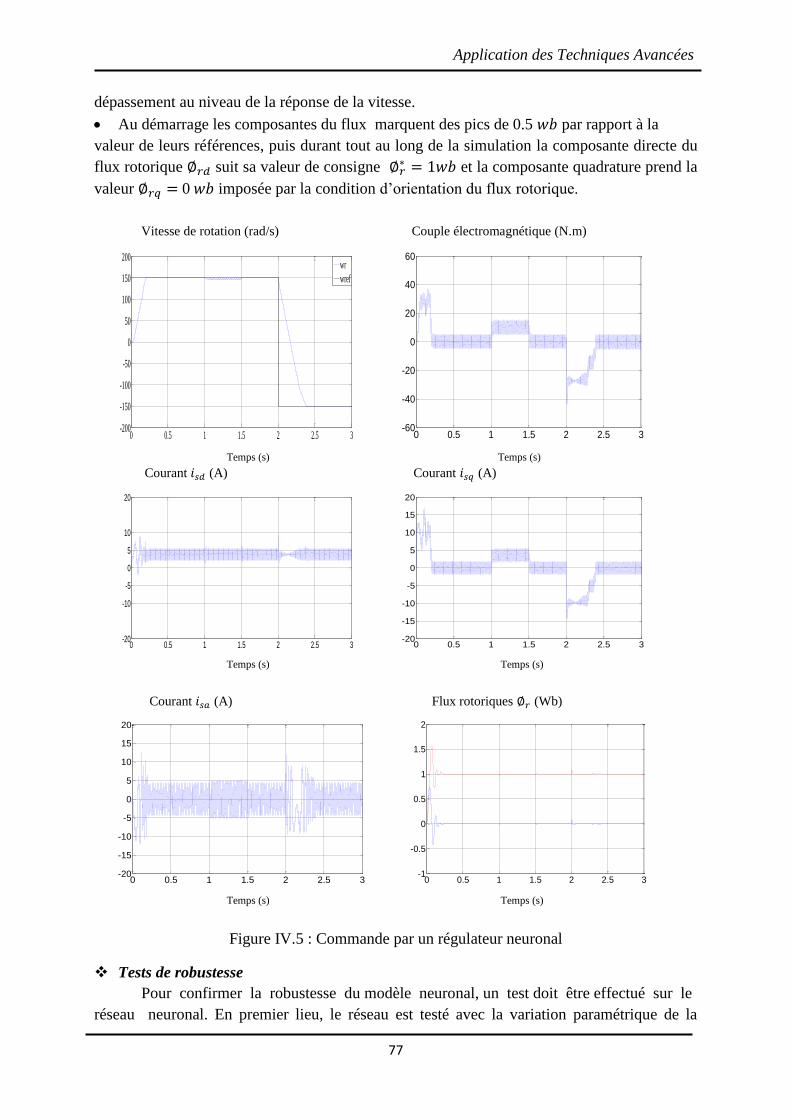
Application des Techniques Avancées
77
dépassement au niveau de la réponse de la vitesse.
Au démarrage les composantes du flux marquent des pics de 0.5 𝑤𝑏 par rapport à la
valeur de leurs références, puis durant tout au long de la simulation la composante directe du
flux rotorique ∅𝑟𝑑 suit sa valeur de consigne ∅𝑟∗ = 1𝑤𝑏 et la composante quadrature prend la
valeur ∅𝑟𝑞 = 0 𝑤𝑏 imposée par la condition d’orientation du flux rotorique.
Vitesse de rotation (rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Courant 𝑖𝑠𝑑 (A) Courant 𝑖𝑠𝑞 (A)
Temps (s) Temps (s)
Courant 𝑖𝑠𝑎 (A) Flux rotoriques ∅𝑟 (Wb)
Temps (s) Temps (s)
Figure IV.5 : Commande par un régulateur neuronal
Tests de robustesse
Pour confirmer la robustesse du modèle neuronal, un test doit être effectué sur le
réseau neuronal. En premier lieu, le réseau est testé avec la variation paramétrique de la
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
wr
wref
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
0 0.5 1 1.5 2 2.5 3-20
-10
-5
0
5
10
20
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
10
15
20
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
10
15
20
0 0.5 1 1.5 2 2.5 3-1
-0.5
0
0.5
1
1.5
2

Application des Techniques Avancées
78
résistance 𝑅𝑟 ensuite une variation du moment d’inertie est appliquée.
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (Wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (Wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (Wb)
Temps (s) Temps (s)
Figure IV.6: Test de la robustesse du régulateur neuronal
par la variation paramétrique
La figure IV.6 montre que le temps de réponse de la vitesse a également
augmenté. Dans le cas 𝑅𝑟 = 0,5. 𝑅𝑟𝑛 il est moins lent que dans le cas 𝑅𝑟 = 1,5 𝑅𝑟𝑛 , et
beaucoup plus lent dans le cas de variation du moment d’inertie 𝐽.
Ainsi, on constate d’après la réponse de flux rotorique un dépassement pendant le
changement du sens de rotation seulement lors la variation de résistance rotorique, ensuite
0 0.5 1 1.5 2 2.5 3-200-150-100
-500
50100150200
Rr=1.5Rr n
Rr=Rr n
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
Rr=Rr n
Rr=1.5Rr n
Fdref
0 0.5 1 1.5 2 2.5 3-200-150-100
-500
50100150200
J=1.5Jn
J=Jn
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
J=Jn
J=1.5Jn
wref
0 0.5 1 1.5 2 2.5 3-200-150-100
-500
50100150200
Rr=0.5Rr n
Rr=Rr n
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
Rr=Rr n
Rr=0.5Rr n
Fdref

Application des Techniques Avancées
79
le flux se stabilise et suit sa valeur de référence.
IV.3. Application de La Logique Floue à La Commande de La Machine Asynchrone
IV.3.1. Description du contrôleur
Pour réaliser le contrôleur flou, on adopte le schéma proposé par Mamdani. D’après la
figure IV.7 ce schéma est composé de :
𝜔𝑟𝑒𝑓 (k) : consigne ou signal de référence de vitesse.
𝑒(𝑘) = 𝜔𝑟𝑒𝑓 (𝑘) − 𝜔(𝑘) : l’erreur entre la vitesse de référence et la vitesse de rotation
du moteur.
∆𝑒(𝑘) : la variation de l’erreur 𝑒(𝑘)
𝐺𝑒 et 𝐺∆𝑒 : représentent les facteurs d’échelle où des gains de normalisation de l’erreur et
de sa variation, on fait varier ces facteurs jusqu'à ce qu’on trouve un phénomène de
réglage convenable. En effet, ces derniers ont un grand effet sur les performances statique
et dynamique de la commande.
D’un bloc de fuzzification utilisé pour convertir l’erreur et sa variation en valeurs floues;
Des règles du régulateur flou;
D’un bloc de défuzzification utilisé pour convertir la variation de commande floue en
valeur numérique;
𝐺∆𝑢 : un gain de dénormalisation est associé à la commande 𝑈𝑘
D’un bloc sommateur.
Les valeurs de normalisation de 𝑒, ∆𝑒 et de dénormalisation de ∆𝑈𝑘 sont exprimées par les
relations suivantes :
𝑋𝑒 = 𝐺𝑒 . 𝑒 (IV.1)
𝑋∆𝑒 = 𝐺∆𝑒 . ∆𝑒 (IV.2)
𝑈𝑘 = 𝑈𝑘−1 + 𝐺∆𝑢 . ∆𝑈𝑘 (IV.3)
Avec :
𝑋𝑒 , 𝑋∆𝑒 et ∆𝑈𝑘 : appelées variables normalisées
𝑒 𝐺𝑒 ∆𝑈𝑘
𝜔𝑟𝑒𝑓 + 𝑒 ∆𝑒 𝐺∆𝑢
𝜔 𝐺∆𝑒
𝑈𝑘
Figure IV.7: Schéma bloc d’un contrôleur flou
Fuzzification
Base de Règles
Inférence Calcul
de ∆𝑒
défuzzification
∑
Système
Application des Techniques Avancées
80
L’univers du discours pour le moteur flou est appliqué sur l’intervalle [−1,+1].
Les facteurs de normalisation permettent d’affecter les entrées normalisées dans l’intervalle
[−1,+1] de l’univers du discours ; le gain de dénormalisation définit le gain en sortie du
correcteur. Ces éléments permettent d’agir de façon globale sur la surface de commande en
élargissant ou en réduisant l’univers du discours des grandeurs de commande.
Les règles d'inférence sont décrites par une matrice dite d’inférence qui rassemble
toutes les règles d'inférence sous forme d’un tableau. Dans le cas d'un tableau à deux
dimensions, les entrées du tableau représentent les ensembles flous des variables d'entrées;
l’intersection d'une colonne et d'une ligne donne l'ensemble flou de la variable de sortie
définie par la règle [17]. Le tableau IV.1 présente la matrice d’inférence à sept règles,
l’univers du discours est découpé donc en sept pour les variables d’entrées et de sortie;
c’est-à-dire sept ensembles flous pour chaque entrée et sortie, où les variables floues sont
nommées : NG (négatif grand), NM (négatif moyen), NP (négatif petit), EZ (égal zéro), PP
(positif petit), PM (positif moyen) et PG (positif grand). On a choisi la forme des fonctions
d’appartenances triangulaire à cause de leur simplicité de mise en œuvre ; et l’implication
utilise l’inférence Max-Min de Mamdani.
∆𝒆
𝑈𝑘
NG NM NP ZE PP PM PG
𝒆
NG NG NM NM NP ZE ZE ZE
NM NG NM NM NP ZE ZE ZE
NP NG NP NP ZE ZE ZE PP
ZE NM NP NP ZE PP PP PM
PP NP ZE ZE ZE PP PP PG
PM ZE ZE ZE PP PM PM PG
PG ZE ZE ZE PP PM PM PG
Tableau IV.1: Matrice d’inférence.
Pour l’application de l’étape de défuziffication, il existe plusieurs méthodes. La
méthode du centre de gravité est l’un des moyens les plus simples et les plus utilisés [17]. Elle
consiste à rechercher le centre de gravité d’un système de sous-ensembles flous dont les poids
sont leurs coefficients d’appartenance. La sélection des sous-ensembles flous de commande
activée au moyen de degrés d’appartenance conduit alors par cette méthode à la définition
d’une grandeur de commande réelle.
Les fonctions d’appartenance de l’erreur (e) et de sa variation (∆𝑒) utilisées par
le contrôleur sont choisies identiques de formes triangulaires, et sont définies sur l’intervalle
1, 1comme le montre la figure IV.8.
Application des Techniques Avancées
81
𝜇(𝒆) 𝜇(∆𝒆)
𝒆 ∆𝒆
𝜇(𝑼𝒌)
𝑼𝒌
Figure. IV.8: Fonction d'appartenance des différentes
variables linguistiques.
La figure IV.9 présente la structure de la commande floue de la machine asynchrone.
La grandeur de sortie de ce régulateur de vitesse est le couple électromagnétique 𝐶𝑒𝑚∗ .
Figure IV.9: Schéma bloc de la structure de réglage
de vitesse par un contrôleur flou.
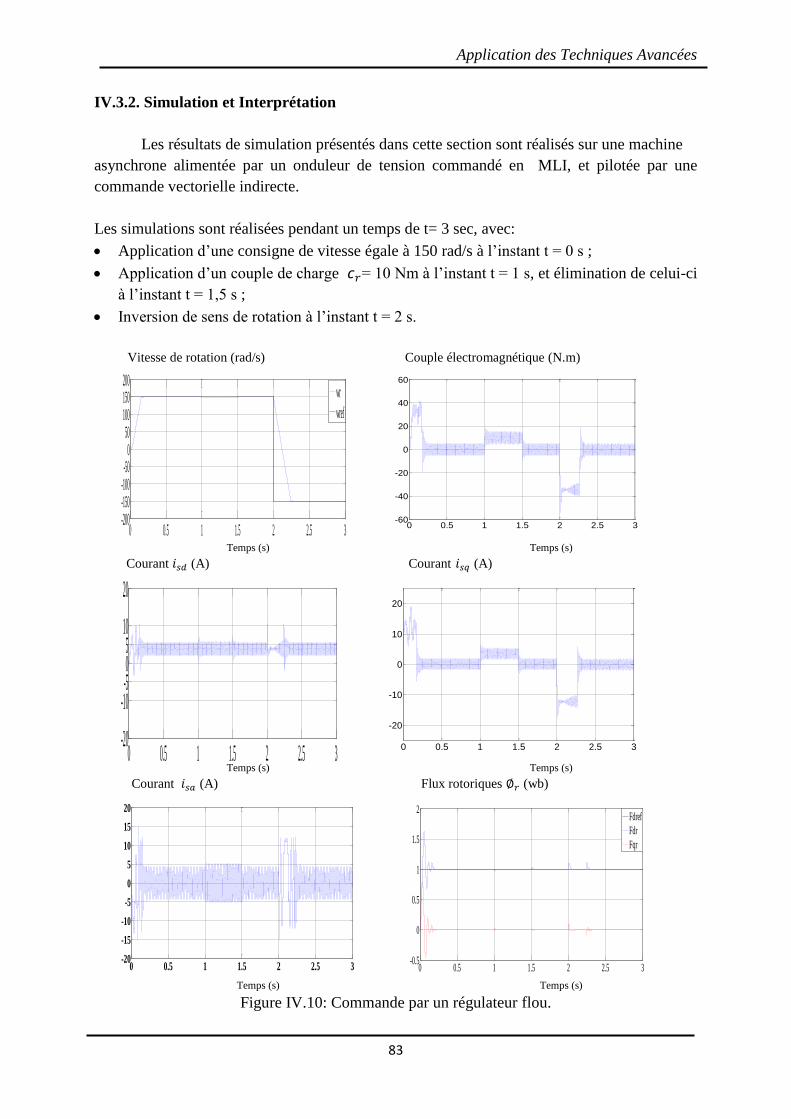
Application des Techniques Avancées
83
IV.3.2. Simulation et Interprétation
Les résultats de simulation présentés dans cette section sont réalisés sur une machine
asynchrone alimentée par un onduleur de tension commandé en MLI, et pilotée par une
commande vectorielle indirecte.
Les simulations sont réalisées pendant un temps de t= 3 sec, avec:
Application d’une consigne de vitesse égale à 150 rad/s à l’instant t = 0 s ;
Application d’un couple de charge 𝘤𝑟= 10 Nm à l’instant t = 1 s, et élimination de celui-ci
à l’instant t = 1,5 s ;
Inversion de sens de rotation à l’instant t = 2 s.
Vitesse de rotation (rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Courant 𝑖𝑠𝑑 (A) Courant 𝑖𝑠𝑞 (A)
Temps (s) Temps (s)
Courant 𝑖𝑠𝑎 (A) Flux rotoriques ∅𝑟 (wb)
Temps (s) Temps (s)
Figure IV.10: Commande par un régulateur flou.
0 0.5 1 1.5 2 2.5 3-200-150-100
-500
50100150200
wr
wref
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
0 0.5 1 1.5 2 2.5 3-20
-10-505
10
20
0 0.5 1 1.5 2 2.5 3
-20
-10
0
10
20
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
10
15
20
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
1.5
2
Fdref
Fdr
Fqr

Application des Techniques Avancées
84
D’après les résultats de simulation, on constate au démarrage et pendant le régime
transitoire que la vitesse augmente presque linéairement et suit sa consigne de référence sans
dépassement, et que l’application du couple résistant n’influe pas sur la vitesse de rotation ;
même lors de l'inversion du sens de rotation comme le montre la figure IV.10. La vitesse est
donc parfaite et présente une bonne performance vis-à-vis des perturbations et du changement
du sens de rotation.
Les flux rotoriques présentent un dépassement pendant le démarrage et suivent rapidement
ses valeurs de références, suivant l’axe 𝑑 ∅𝑟𝑑 = 1𝑤𝑏, suivant l’axe 𝑞 la composante en
quadrature ∅𝑟𝑞 = 0𝑤𝑏; ce qui confirme la robustesse de la commande appliquée.
L’application du couple résistant conduit à une augmentation du couple
électromagnétique développé ainsi que le courant statorique 𝑖𝑠𝑞, qui présente une forme
similaire à la forme du couple, et présente ainsi une pointe importante lors du changement du
sens de marche. Avec élimination du couple résistant le couple électromagnétique et le
courant statorique 𝑖𝑠𝑞 suivent leurs régimes permanents.
Tests de robustesse
Pour pouvoir tester la robustesse du régulateur flou, on applique une variation
paramétrique de la machine et ceci allant jusqu’à 150 % et 50% pour la résistance 𝑅𝑟, et
150% pour le moment d’inertie 𝐽.
D’après la figure IV.11 et lors les variations paramétriques, on constate que la réponse
de vitesse suit bien la consigne mais avec un temps de réponse un peu lent par rapport à l’état
normal.
Ainsi, lors de la variation de résistance rotorique, le flux rotorique varie pendant un temps
très court dans le cas de changement du sens de rotation suivant les deux axes (𝑑 ) et (𝑞) ; puis
pendant que le régime permanent est établi, le flux suivant l’axe (𝑑) revient à sa valeur de
référence ∅𝑟𝑑 = 1𝑤𝑏 , et le flux suivant l’axe (𝑞 ) devient nul ∅𝑟𝑞 = 0𝑤𝑏. Par contre lors de
la variation du moment d’inertie 𝐽, les flux rotoriques suivent bien leurs valeurs de référence.
Les résultats obtenus montrent donc que le contrôleur flou présente des performances de
poursuite très satisfaisantes.

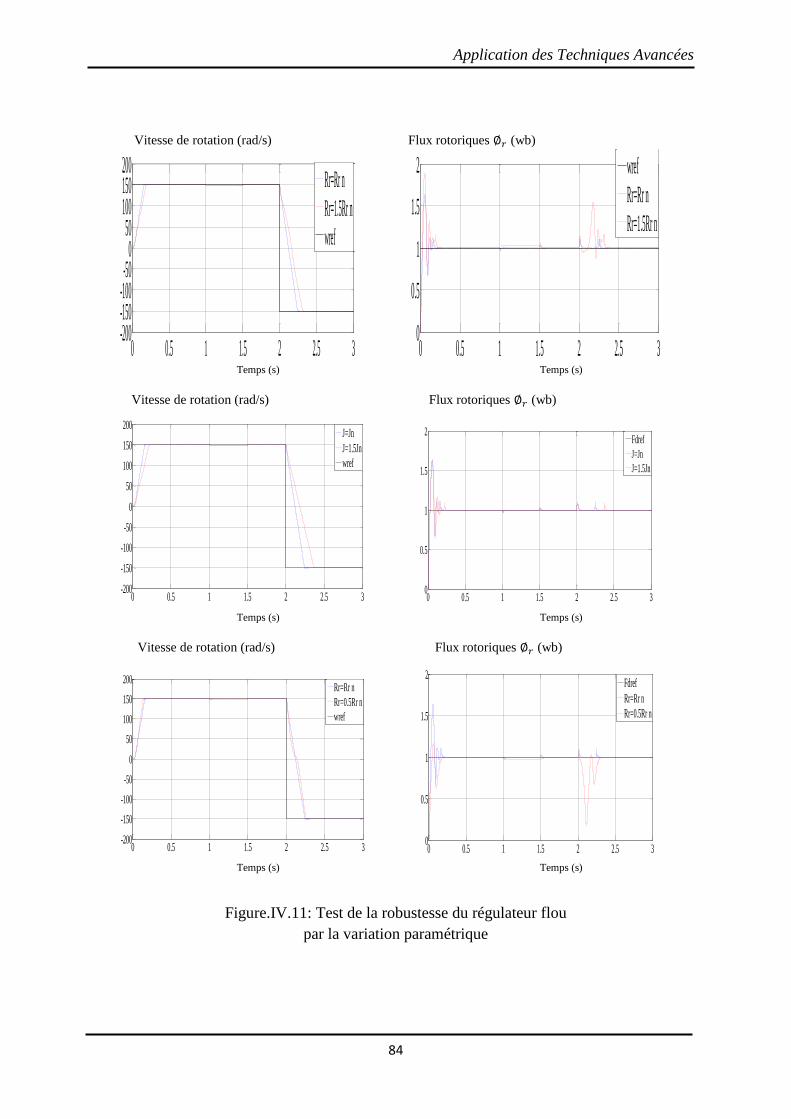
Application des Techniques Avancées
84
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (wb)
Temps (s) Temps (s)
Figure.IV.11: Test de la robustesse du régulateur flou
par la variation paramétrique
0 0.5 1 1.5 2 2.5 3-200-150-100
-500
50100150200
Rr=Rr n
Rr=1.5Rr n
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
wref
Rr=Rr n
Rr=1.5Rr n
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
J=Jn
J=1.5Jn
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
Fdref
J=Jn
J=1.5Jn
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
Rr=Rr n
Rr=0.5Rr n
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
Fdref
Rr=Rr n
Rr=0.5Rr n
Application des Techniques Avancées
85
IV.4. Synthèse d’un Contrôleur ANFIS pour la Régulation de Vitesse
IV. 4.1. Description et structure du contrôleur ANFIS proposé
Le contrôleur ANFIS permet la génération automatique de règles floues à sept
ensembles basées sur le modèle d’inférence de type Sugeno. Deux variables d’entrées
génèrent l’action de contrôle ‘U’ qui sera appliquée à la commande vectorielle de la
machine asynchrone.
IV.4.2. Apprentissage du contrôleur "entraînement d’un réseau ANFIS "
Le réseau ANFIS utilisé dans ce travail a été programmé par la boite à outil de la
logique floue Toolbox dans le logiciel Matlab (version 7) [23] [46] [55], avec lequel on a
construit les règles floues (Si-Alors) avec leurs fonctions d’appartenances appropriées à sept
ensembles, tout en respectant les étapes suivantes :
a- Emploie de la commande Fuzzy pour produire un système FIS initiale;
b- Entrer les paramètres pour l’apprentissage;
- Charger les données pour l’apprentissage :
Deux entrées : l’erreur normalisé 𝑒(𝑘) (l’erreur entre la vitesse de
référence et la vitesse de rotation du moteur) et la variation normalisé de
cette erreur ∆𝑒(𝑘)
Une seule sortie : le couple de référence normalisé
- Apprentissage hybride (back propagation de l’erreur et les moindres carrés);
- Le nombre d’itérations = 100 ;
- Le nombre de fonctions d’appartenance est égale à 7; donc on a 49 règles floues
- La tolérance =10−3 ;
d- Arrêter quand la tolérance est satisfaite;
e- Valider les résultats avec un autre ensemble de données.
La structure neuronale équivalente proposée sous Matlab est représentée à la figure IV.12.
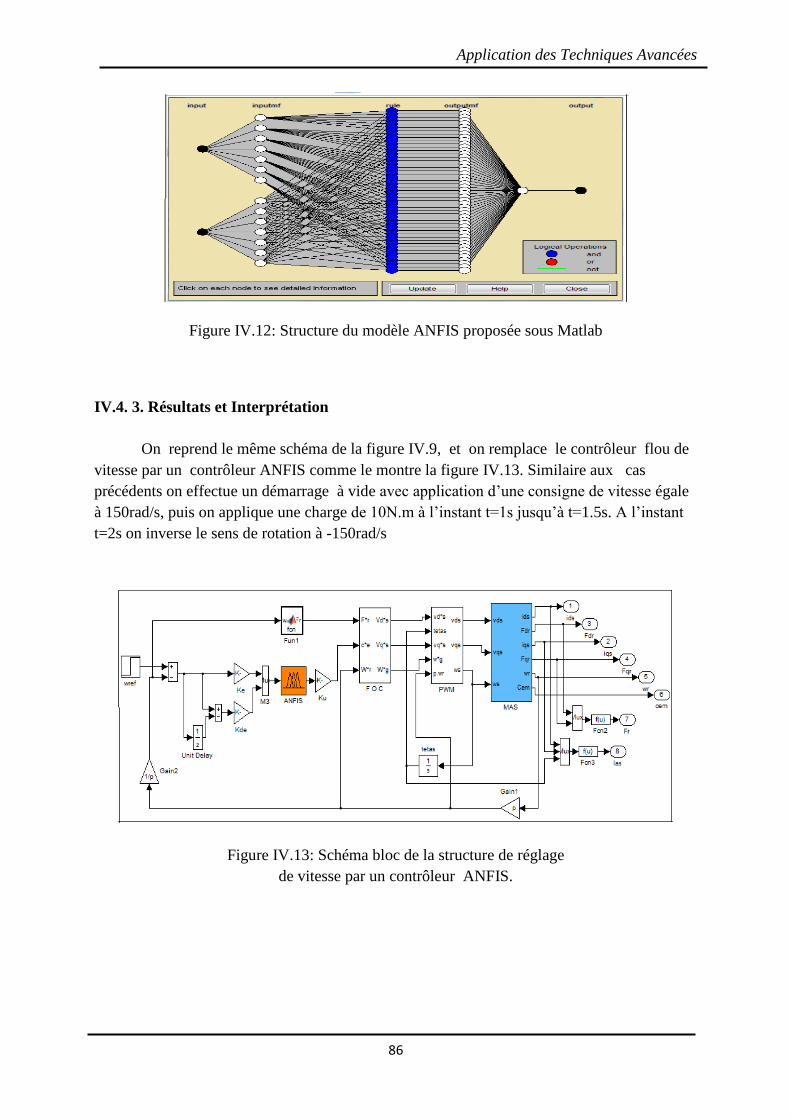
Application des Techniques Avancées
86
Figure IV.12: Structure du modèle ANFIS proposée sous Matlab
IV.4. 3. Résultats et Interprétation
On reprend le même schéma de la figure IV.9, et on remplace le contrôleur flou de
vitesse par un contrôleur ANFIS comme le montre la figure IV.13. Similaire aux cas
précédents on effectue un démarrage à vide avec application d’une consigne de vitesse égale
à 150rad/s, puis on applique une charge de 10N.m à l’instant t=1s jusqu’à t=1.5s. A l’instant
t=2s on inverse le sens de rotation à -150rad/s
Figure IV.13: Schéma bloc de la structure de réglage
de vitesse par un contrôleur ANFIS.
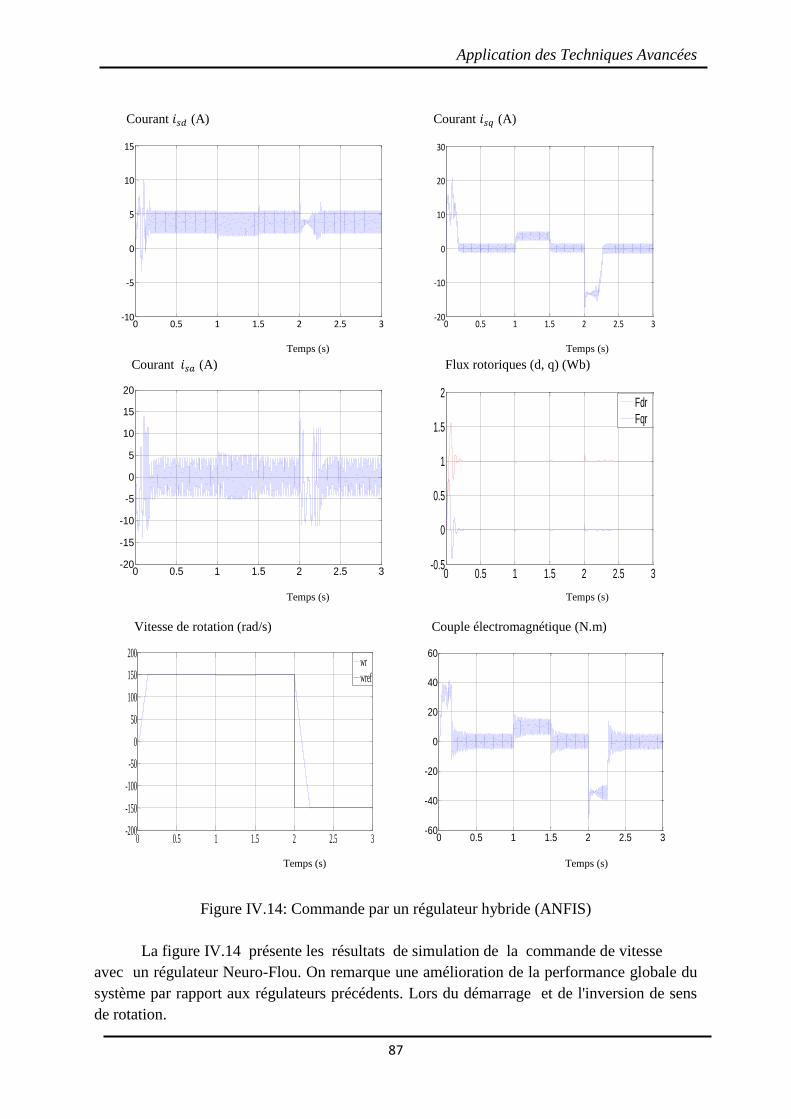
Application des Techniques Avancées
87
Courant 𝑖𝑠𝑑 (A) Courant 𝑖𝑠𝑞 (A)
Temps (s) Temps (s)
Courant 𝑖𝑠𝑎 (A) Flux rotoriques (d, q) (Wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Couple électromagnétique (N.m)
Temps (s) Temps (s)
Figure IV.14: Commande par un régulateur hybride (ANFIS)
La figure IV.14 présente les résultats de simulation de la commande de vitesse
avec un régulateur Neuro-Flou. On remarque une amélioration de la performance globale du
système par rapport aux régulateurs précédents. Lors du démarrage et de l'inversion de sens
de rotation.
0 0.5 1 1.5 2 2.5 3-10
-5
0
5
10
15
0 0.5 1 1.5 2 2.5 3-20
-10
0
10
20
30
0 0.5 1 1.5 2 2.5 3-20
-15
-10
-5
0
5
10
15
20
0 0.5 1 1.5 2 2.5 3-0.5
0
0.5
1
1.5
2
Fdr
Fqr
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
wr
wref
0 0.5 1 1.5 2 2.5 3-60
-40
-20
0
20
40
60
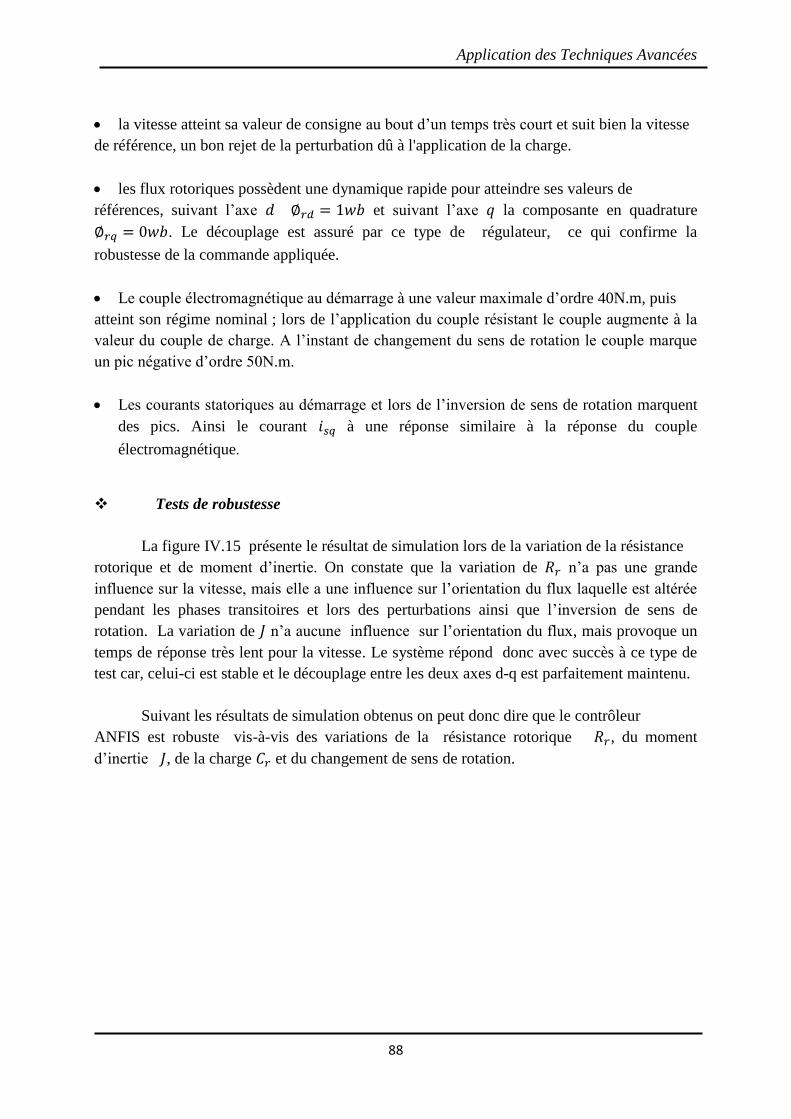
Application des Techniques Avancées
88
la vitesse atteint sa valeur de consigne au bout d’un temps très court et suit bien la vitesse
de référence, un bon rejet de la perturbation dû à l'application de la charge.
les flux rotoriques possèdent une dynamique rapide pour atteindre ses valeurs de
références, suivant l’axe 𝑑 ∅𝑟𝑑 = 1𝑤𝑏 et suivant l’axe 𝑞 la composante en quadrature
∅𝑟𝑞 = 0𝑤𝑏. Le découplage est assuré par ce type de régulateur, ce qui confirme la
robustesse de la commande appliquée.
Le couple électromagnétique au démarrage à une valeur maximale d’ordre 40N.m, puis
atteint son régime nominal ; lors de l’application du couple résistant le couple augmente à la
valeur du couple de charge. A l’instant de changement du sens de rotation le couple marque
un pic négative d’ordre 50N.m.
Les courants statoriques au démarrage et lors de l’inversion de sens de rotation marquent
des pics. Ainsi le courant 𝑖𝑠𝑞 à une réponse similaire à la réponse du couple
électromagnétique.
Tests de robustesse
La figure IV.15 présente le résultat de simulation lors de la variation de la résistance
rotorique et de moment d’inertie. On constate que la variation de 𝑅𝑟 n’a pas une grande
influence sur la vitesse, mais elle a une influence sur l’orientation du flux laquelle est altérée
pendant les phases transitoires et lors des perturbations ainsi que l’inversion de sens de
rotation. La variation de 𝐽 n’a aucune influence sur l’orientation du flux, mais provoque un
temps de réponse très lent pour la vitesse. Le système répond donc avec succès à ce type de
test car, celui-ci est stable et le découplage entre les deux axes d-q est parfaitement maintenu.
Suivant les résultats de simulation obtenus on peut donc dire que le contrôleur
ANFIS est robuste vis-à-vis des variations de la résistance rotorique 𝑅𝑟, du moment
d’inertie 𝐽, de la charge 𝐶𝑟 et du changement de sens de rotation.
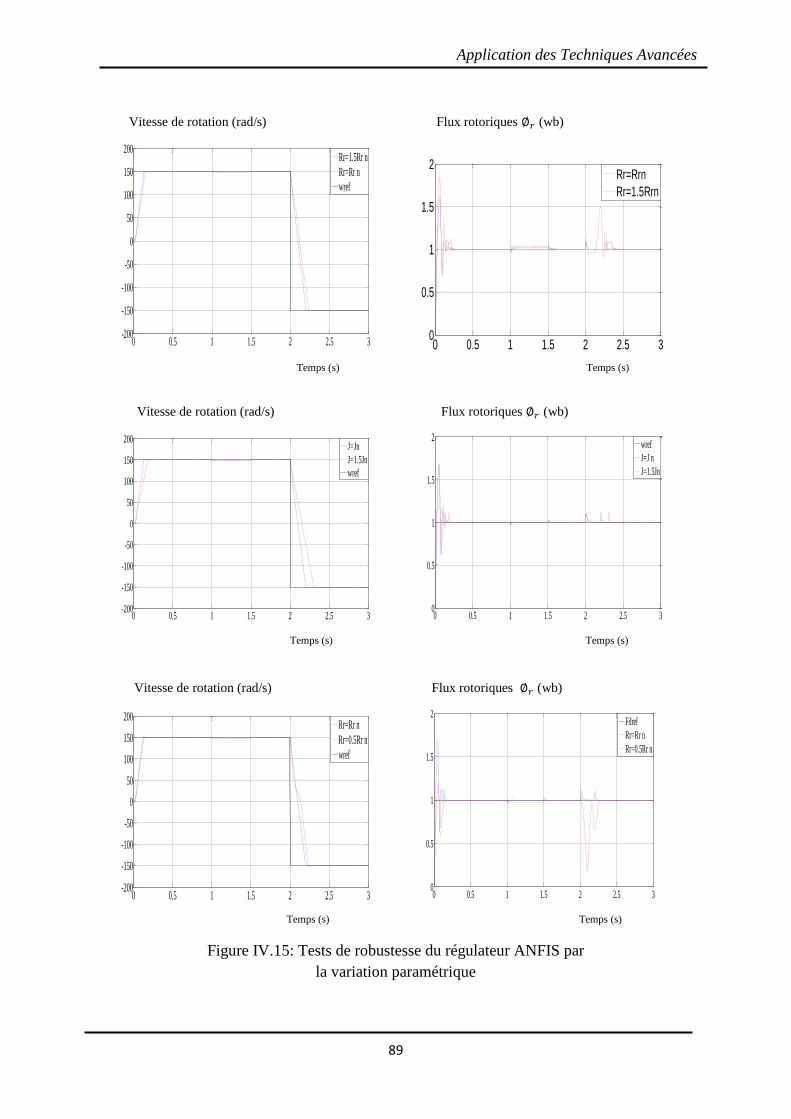
Application des Techniques Avancées
89
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (wb)
Temps (s) Temps (s)
Vitesse de rotation (rad/s) Flux rotoriques ∅𝑟 (wb)
Temps (s) Temps (s)
Figure IV.15: Tests de robustesse du régulateur ANFIS par
la variation paramétrique
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
Rr=1.5Rr n
Rr=Rr n
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
Rr=Rrn
Rr=1.5Rrn
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
J=Jn
J=1.5Jn
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
wref
J=J n
J=1.5Jn
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
Rr=Rr n
Rr=0.5Rr n
wref
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
Fdref
Rr=Rr n
Rr=0.5Rr n

Application des Techniques Avancées
90
IV.5. Etude Comparative des Différentes modes de Commande :PI, RN, LF et ANFIS
Vitesse de rotation (rad/s)
Temps (s)
Représentation avec "Zoom"
Temps (s)
Représentation avec "Zoom"
Temps (s)
Figure IV.16: Réponse de la vitesse pour les quatre types de régulateur :
PI, RN, LF et ANFIS
0 0.5 1 1.5 2 2.5 3-200
-150
-100
-50
0
50
100
150
200
Wr(PI classique)
Wrn(Neuronal)
Wrf(Flou)
wra(Anfis)
wref
0.075 0.1 0.125 0.15 0.175 0.2 0.225 0.25
140
145
150
155
160
Wr(PI classique)
Wrn(Neuronal)
Wrf(Flou)
wra(Anfis)
wref
2.15 2.2 2.25 2.3 2.35 2.4 2.45
-160
-150
-140
-130
-120
Wr(PI classique)
Wrn(Neuronal)
Wrf(Flou)
Wra(Anfis)
Wref

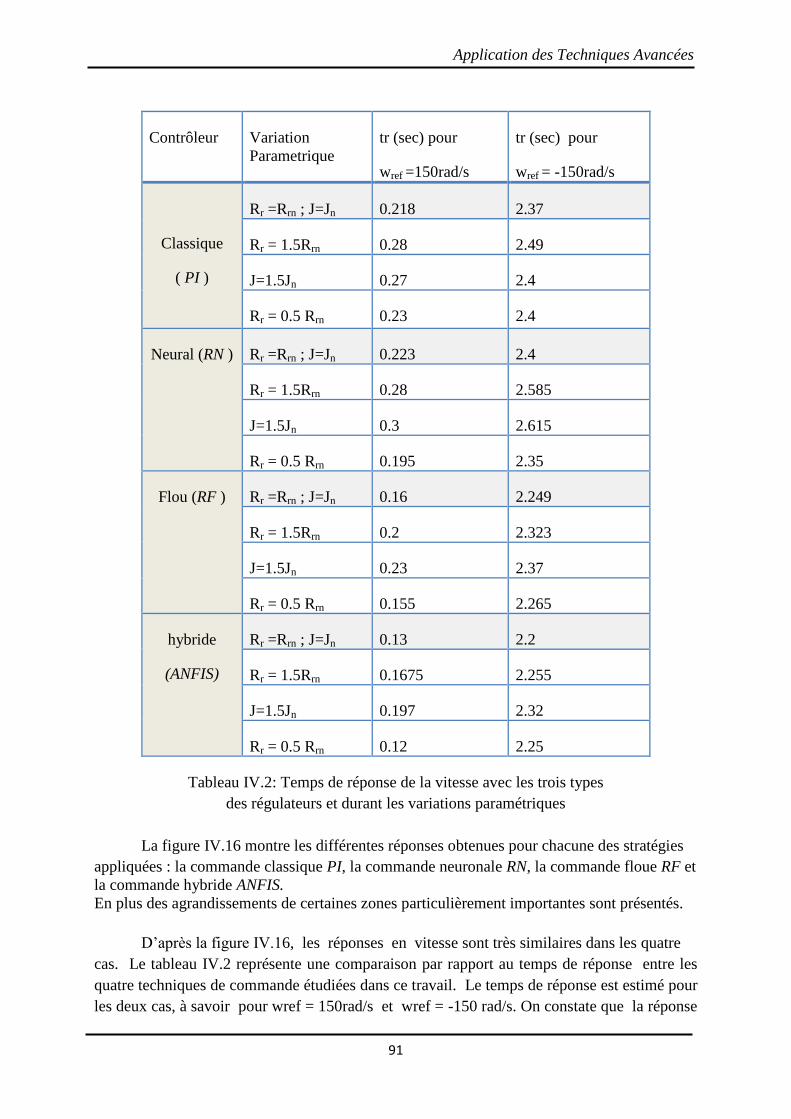
Application des Techniques Avancées
91
Contrôleur Variation
Parametrique
tr (sec) pour
wref =150rad/s
tr (sec) pour
wref = -150rad/s
Classique
( PI )
Rr =Rrn ; J=Jn 0.218 2.37
Rr = 1.5Rrn 0.28 2.49
J=1.5Jn 0.27 2.4
Rr = 0.5 Rrn 0.23 2.4
Neural (RN ) Rr =Rrn ; J=Jn 0.223 2.4
Rr = 1.5Rrn 0.28 2.585
J=1.5Jn 0.3 2.615
Rr = 0.5 Rrn 0.195 2.35
Flou (RF ) Rr =Rrn ; J=Jn 0.16 2.249
Rr = 1.5Rrn 0.2 2.323
J=1.5Jn 0.23 2.37
Rr = 0.5 Rrn 0.155 2.265
hybride
(ANFIS)
Rr =Rrn ; J=Jn 0.13 2.2
Rr = 1.5Rrn 0.1675 2.255
J=1.5Jn 0.197 2.32
Rr = 0.5 Rrn 0.12 2.25
Tableau IV.2: Temps de réponse de la vitesse avec les trois types
des régulateurs et durant les variations paramétriques
La figure IV.16 montre les différentes réponses obtenues pour chacune des stratégies
appliquées : la commande classique PI, la commande neuronale RN, la commande floue RF et
la commande hybride ANFIS.
En plus des agrandissements de certaines zones particulièrement importantes sont présentés.
D’après la figure IV.16, les réponses en vitesse sont très similaires dans les quatre
cas. Le tableau IV.2 représente une comparaison par rapport au temps de réponse entre les
quatre techniques de commande étudiées dans ce travail. Le temps de réponse est estimé pour
les deux cas, à savoir pour wref = 150rad/s et wref = -150 rad/s. On constate que la réponse

Application des Techniques Avancées
92
de vitesse engendrée par le régulateur ANFIS est plus rapide dans les deux sens de
fonctionnement de la machine.
Lors de l’introduction des erreurs paramétriques rotorique et durant la variation du
sens de rotation on remarque :
D’après les figures IV.6, IV.11 et IV.15 qui représentent la commande de vitesse de la
machine asynchrone par les régulateurs RN, RF et ANFIS, les réponses du flux rotorique du
système présentent des dépassements, juste un moment après le système rétablit leur position.
D’après les figures III.16 et III.17 qui représentent la commande de vitesse de la machine
asynchrone par le régulateur classique PI, une dégradation de la réponse du flux du système.
Tout au long de la simulation le flux rotorique ne suit plus leur signal de référence, ce qui
implique la sensibilité à la variation paramétrique rotorique.
La réponse en vitesse est ralentie dans les quatre cas, mais les courbes restent très proches
les unes des autres, et la réponse en vitesse du régulateur ANFIS reste la plus rapide.
On peut affirmer que la commande Neuro-flou permet d’améliorer le comportement et
l’efficacité de la commande vectorielle, et d’obtenir ainsi un entraînement à vitesse variable
de haute performance. Cette approche semble donc la plus performante parmi les techniques
de commandes intelligentes exploitées pour le réglage de la vitesse de la machine asynchrone.
IV.6 .Conclusion
Dans ce chapitre, on a présenté des techniques différentes pour le réglage de vitesse
d’une machine asynchrone commandée vectoriellement, dans le but d’obtenir de bonnes
performances.
La comparaison entre ces régulateurs au niveau de la construction, montre que le
régulateur neuro-flou a une phase de simulation plus rapide que le régulateur flou qui souffre
d’une phase de simulation très lent. Cet inconvénient a conduit à créer le contrôleur ANFIS,
qui est la combinaison de réseau flou et de réseau neuronal, qui est caractérisé par une phase
d’apprentissage très rapide. La combinaison de l’algorithme de descente du gradient et de
l’algorithme d’estimation des moindres carrés permet de réduire la complexité de
l’apprentissage et d’en améliorer l’efficacité [35].
Pour tester la robustesse de ces régulateurs, des perturbations sont introduits par
les variations paramétriques. Suite à une étude et à une comparaison au niveau de la
robustesse ,on déduit que le contrôleur ANFIS a donné une amélioration des performances
dynamiques pour le régime transitoire, ainsi que statique, respectivement en poursuite et en
rejection d’un contrôle bouclé, donc le découplage a été maintenu. Le temps de réponse de la
vitesse de la machine asynchrone est bien meilleur avec ANFIS qu’avec les autres approches.

Conclusion Générale
Conclusion Générale
Conclusion Générale
93
Conclusion Générale
L’augmentation croissante des performances globales des machines industrielles à
courant alternatif pour l’entraînement à vitesse variable est principalement liée aux
développements réalisés dans le domaine du contrôle-commande. La stratégie de commande
vectorielle de type indirecte est sans aucun doute, la structure la plus utilisée industriellement,
et constitue l’essentiel des structures de commandes avancées, les études présentées ont
montré sa parfaite propriété pour la commande à vitesse variable des moteurs asynchrones.
On constate que la commande vectorielle indirecte avec régulateur classique répond
aux exigences de découplage et de stabilité imposées, mais ne répond pas à l’exigence de
robustesse qui provoque les conséquences indésirables suivantes :
Dégradation de réponse des grandeurs régulée (vitesse, flux),
Le système peut devenir instable quand la grandeur sert à réguler perd le suivi de
consigne désiré.
Consommation supplémentaire du courant pour développer un couple donné, ce qui induit
la diminution de rendement du système.
Pour remédier à ces problèmes on a proposé de remplacer ce contrôleur classique par les
contrôleurs intelligents qui apportent des degrés de fiabilité supérieurs au régulateur classique.
Ces contrôleurs sont caractérisés par des facteurs réglables, par :
Le nombre de couche cachées ainsi que celui des neurones dans chaque couche avec
l’algorithme de retro-propagation du gradient et qui servent à bien déterminer un
contrôleur fiable et performant.
La taille de la base des règles, le choix de l’univers du discours lequel permet la restriction
de présence de l’ensemble de données (entrées), et les gains de normalisation et de
dénormalisation qui sont les points les plus importants dans la construction d’un
contrôleur flou et dont leur réponse varie selon le choix de ces paramètres cités plus haut.
Ainsi, la rapidité de réponse de ce régulateur reste le point faible de cette méthode de
commande.
La connaissance préalable de l’ensemble entrées/sorties qui nécessite le régulateur hybride
ANFIS.
Conclusion Générale
94
Sans oublier le facteur qui dépend de l’alimentation de la machine asynchrone, l’onduleur
de tension et la technique MLI qui ont aussi une influence sur la réponse du système et
sur leur performance.
Enfin, la complexité d’une méthode est relative au nombre de paramètres à régler. Les
techniques dite ‘’avancées’’, exigent en général un plus grand nombre de coefficients à
régler; c’est pourquoi il est indispensable de développer, en parallèle à la l’élaboration et la
synthèse de la loi de commande, une stratégie d’autopilotage la plus transparente possible
pour l’utilisateur.
Dans notre étude, les résultats proposés ont clairement mis en évidence l’attribution des
lois de commande avancées ; plus particulièrement la combinaison de deux approches, floue
et neuronale qui a donné de meilleurs résultats par rapport à la performance de stabilité qui
consiste à un bon poursuivi de trajectoire (flux, vitesse), et la performance de rapidité qui se
caracterise par un meilleur temps de réponse. Ainsi, le but essentiel de l’étude de ces
techniques est la robustesse. La combinaison des deux approches en question possède la
capacité d’adaptation de ses paramètres au temps réel grâce à un algorithme de retro-
propagation du gradient. Cette combinaison assure donc le découplage entre le problème de
suivi de trajectoire et le problème de rejet de perturbation.
Les travaux théoriques étudiés et les solutions retenues restent à tester sur l’application
réelle pour confirmer l’adaptation pratique des paramètres théoriques appliqués dans notre
système de commande, et qui pourraient être améliorés en jouant sur les facteurs réglables des
régulateurs cités précédemment. Cette étude ouvre donc un grand nombre de perspectives.
Tout d’abord, il serait intéressant d’adapter une méthode pour le choix de la structure
neuronale, ainsi que les paramètres de construction d’une structure floue. On peut envisager
d’appliquer d’autres stratégies de commandes telles que les algorithmes génétiques, ou une
amélioration de la combinaison hybride optimisé par des algorithmes génétiques. Enfin, on
peut conclure que l’efficacité de chaque type de commande dépend de leur cas d’application.
Annexe

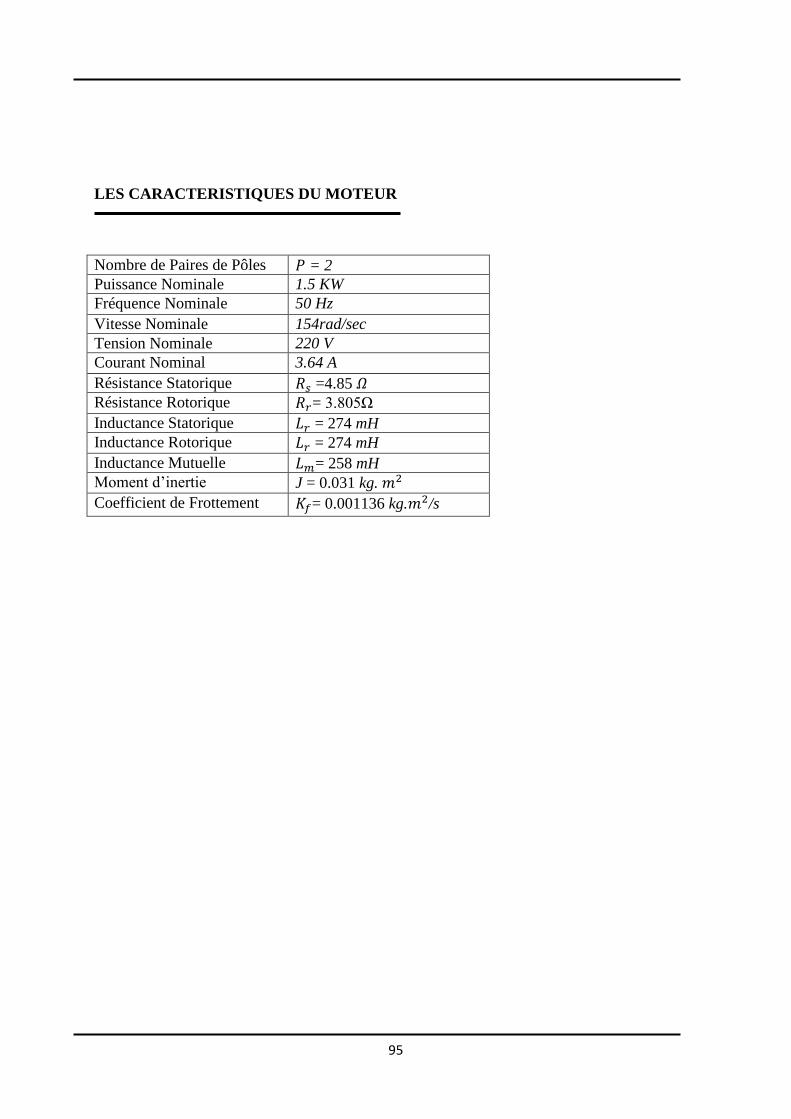
95
LES CARACTERISTIQUES DU MOTEUR
Nombre de Paires de Pôles 𝑃 = 2
Puissance Nominale 1.5 KW
Fréquence Nominale 50 Hz
Vitesse Nominale 154rad/sec
Tension Nominale 220 V
Courant Nominal 3.64 A
Résistance Statorique 𝑅𝑠 =4.85 𝛺
Résistance Rotorique 𝑅𝑟= 3.805Ω
Inductance Statorique 𝐿𝑟 = 274 mH
Inductance Rotorique 𝐿𝑟 = 274 mH
Inductance Mutuelle 𝐿𝑚= 258 mH
Moment d’inertie J = 0.031 kg. 𝑚2
Coefficient de Frottement 𝐾𝑓= 0.001136 kg.𝑚2/s
Références Bibliographiques

Références Bibliographiques
96
Références Bibliographiques
[1] Carlos Canudas de Wit ‘’Modélisation, contrôle vectoriel et DTC : Commande des
moteurs asynchrones 1‘’ Hermès Science Publications.
[2] B.Robyns, B.Francois, P.Degobert, J-P.Hautier ‘’Commande vectorielle de la machine
asynchrone’’ Edition Technip.
[3] Ratna Ika Putri, Mila fauziya , Agus Setiawan ‘’Neural fuzzy For Speed Control of Three
Phase Induction Motor’’ IJCSNS International Journal of Computer Science and Network
Security, Vol.10 10, October 2010.
[4] S.Allirani,V Jagannathan ‘’ High Performance Direct Torque Control of Induction
Motor Drives Using Space Vector Modulation’’ IJCSI International Journal of Computer
Science Issues, Vol. 7, Issue 6, November 2010.
[5] Kheldoun Aissa ‘’Amélioration des Performances d’un Variateur de Vitesse par Moteur
Asynchrone Contrôlé par La Méthode à Flux Orienté ‘’ Thèse Doctorat université Boumerdès
2007.
[6] O.GUENOUNOU ‘’Méthodologie de conception de contrôleurs intelligents par
l'approche génétique- application à un bioprocédé’’ Thèse Doctorat université Toulouse
2009.
[7] P. M. Menghal and A. J. Laxmi, “Adaptive Neuro Fuzzy Based Dynamic Simulation Of
Induction Motor Drives,” in Proceedings of the IEEE International Conference on Fuzzy
Systems (FUZZ’13), pp. 1–8, IEEE, Hyderabad, India, July 2013.
[8] Moussa Zerbo ‘’Identification Des Paramètres Et Commande Vectorielle Adaptative A
Orientation Du Flux Rotorique De La Machine Asynchrone A Cage’’ Thèse de Doctorat
Université Québec a Trois-Rivières 2008.
[9] R. Sadouni ,A.Meroufel ‘’ Performances comparative study of Field Oriented Control
(FOC) and Direct Torque Control (DTC) of Dual Three Phase Induction Motor (DTPIM)’’
International Journal Of Circuits, Systems And Signal Processing Issue 2, Volume 6, 2012.
[10] H. Chaikhy, M.Khafallah, A.Saad, M.Es-Saadi, K.Chikh ‘’ Evaluation des Performances
des Commandes Vectorielles de La Machine A Induction’’ Revue de génie industriel 2011, 6,
23-32, ISSN 1313-8871.
[11] Y.Elbia ‘’ Commande Floue Optimisée d’une Machine Asynchrone à Double
Alimentation et à Flux Orienté ‘’ Thèse Magister université Batna 2009.
[12] L. Youb, A. Crăciunescu ‘’ Commande Directe du Couple et Commande Vectorielle de
la Machine Asynchrone’’ Rev. Roum. Sci. Techn.– Électrotechn. et Énerg., 53, 1, p. 87–98,
Bucarest, 2008.

Références Bibliographiques
97
[13] René Husson ‘’Méthodes de commande des machines électriques’’ Hermès Science
Publication.
[14] T. F. Chan , K. Shi, ‘’Applied Intelligent Control of Induction Motor Drives’’, IEEE
Willey Press, 1st edition, 2011.
[15] D. Ben Attous , Y. Bekakra ‘’ Speed Control of a Doubly Fed Induction Motor using
Fuzzy Logic Techniques’’ International Journal on Electrical Engineering and Informatics -
Volume 2, 3, 2010.
[16] A.Chaiba’’ Commande de la Machine Asynchrone a Double Alimentation par des
Techniques de L’intelligence Artificielle’’ Thèse de Doctorat Université Batna 2010.
[17] A.Kusagur, S. F. Kodad , B V. Sankar Ram ‘’ Modeling, Design & Simulation of an
Adaptive Neuro-Fuzzy Inference System (ANFIS) for Speed Control of Induction Motor’’
International Journal of Computer Applications (0975 – 8887) Volume 6– 12, 2010.
[18] MELIANI Bouziane ‘’Application des Techniques Intelligentes A La Commande d’une
Machine Asynchrone Double Etoile Associée A Un Convertisseur Matriciel’’ Thèse Doctorat
université Sidi –Bei-Abbes 2014.
[19] N.Kabache ‘’Amélioration des Performances de La Commande d’un Moteur Asynchrone
A Cage et Elaboration d’un Estimateur Universel de ses Paramètre en Utilisant Les Réseaux
de Neurones Artificiels’’ Thèse Doctorat université Boumerdès 2007.
[20] S.R. Khuntia, K.B. Mohanty, S. Panda , C. Ardil ‘’ A Comparative Study of P-I, I-P,
Fuzzy and Neuro-Fuzzy Controllers for Speed Control of DC Motor Drive’’ International
Journal of Electrical and Information Engineering 4:3 2010.
[21] D.RACOCEANU ’’ Contribution à la surveillance des Systèmes de Production en
utilisant les Techniques de l’Intelligence Artificielle’’ Thèse d’Habilitation 2006.
[22] S.Chekroun’’Commande Neuro-Floue Sans Capteur de Vitesse d’une machine
Asynchrone Triphasée’’ Thèse Magister Université Oran 2009.
[23] Léon Personnaz, Isabelle Rivals ‘’Réseaux de neurones formels pour la modélisation, la
commande et la classification ‘’ CNRS éditions, Paris, 2003.
[24] Lokman H. Hassan, M. Moghavvemi ,Haider A.F. Mohamed ‘’ Takagi-Sugeno Fuzzy
Gains Scheduled PI Controller for Enhancement of Power System Stability’’ American
Journal of Applied Sciences 7 (1): 145-152, ISSN 1546-9239, 2010.
[25] Pundaleek .B. H, Manish G. Rathi, Vijay Kumar M. G. ‘’ Speed Control of Induction
Motor: Fuzzy Logic Controller v/s PI Controller’’ IJCSNS International Journal of Computer
Science and Network Security, Vol.10 10, October 2010.
[26] K.Laroussi, M.Zelmat ‘’ Optimisation Floue des paramètres du régulateur PI
appliquée à un Moteur à Induction ‘’ 3rd International Conférence: Sciences of Electronic,
Technologies of Information and Télécommunications March 27-31, 2005 – TUNISIA.
Références Bibliographiques
98
[27] Jérôme FAUCHER ‘’ Les plans d’expériences pour le réglage de commandes `a base
de logique floue’’ Thèse Doctorat université Toulouse 2006.
[28] A.CHIKHI ’’Conception d’une Commande Floue Directe du Couple (FDTC) de La
Machine Asynchrone Basée Sur La SVM’’ Thèse Doctorat université Batna 2013.
[29] N.CHOUG ’’Etude de la Robustesse des Contrôleurs Flous d’une Machine Synchrone à
Aimants Permanents avec Pilotage Vectoriel’’ Thèse Magister Université Batna 2011.
[30] N.Talbi ‘’Conception des Systèmes d’Inférence Floue par des Approches Hybrides :
Application pour la Commande et la Modélisation des Systèmes Nonlinéaires ‘’ Thèse
Doctorat Université de Constantine 2014.
[31] MOKEDDEM Diab ‘’ Contrôle Flou des Processus Biotechnologiques à Base
d’Algorithmes Génétiques’’ Thèse Doctorat Université de Sétif 2010.
[32] P. M. Menghal, A. J. Laxmi, D.Anusha “Speed Control of Induction Motor using Fuzzy
Logic Controller,” i-manager’s Journal on Electrical Engineering,Vol.8 2, 2014.
[33] A.BOUAFIA ‘’ Techniques de Commande Prédictive et Floue Pour Les Systèmes des
’électronique de Puissance: Application Aux Redresseurs A MLI’’ Thèse Doctorat université
Sétif 2010.
[34] Srinivasa Rao Jalluri , Dr.B.V. Sanker Ram ‘’ A Neuro Fuzzy Controller For Induction
Machines Drives’’ Journal of Theoretical and Applied Information Technology 2005 - 2010
JATIT & LLS.
[35] Otilia Elena vasile ‘’ Contribution au pronostic de défaillances par réseau neuro-flou :
maîtrise de l’erreur de prédiction ‘’ Thèse de doctorat 2008.
[36] S.M. Gadoue, D. Giaouris, J.W. Finch ‘’ Artificial intelligence-based speed control of
DTC induction motor drives— A comparative study’’ Electric Power Systems Research 79
(2009) 210–219.
[37] R.Kumar, R.A. Gupta ,R.S. Surjuse ‘’Adaptive Neuro-Fuzzy Speed Controller for Vector
Controlled Induction Motor Drive’’ Asian Power Electronics Journal, Vol. 3, No. 1, 2009.
[38] Rajesh Kumar, R. A. Gupta, Rajesh S. Surjuse ‘’ High-Performance SVPWM-VCIM
Drive with Adaptive Neuro-Fuzzy Speed Controller’’International Journal of Computer and
Electrical Engineering, Vol. 2, No. 1, February, 2010.
[39] P.Veena, R.Jeyabharath, M.Rajaram ‘’Neuro Fuzzy Based Direct Torque Control for
Switched Reluctance Motor Drive’’ Mediamira Science Publisher Vol 50 3 2009
[40] M.M. Krishan, L. Barazane , A. Khwaldeh ‘’Using an Adaptative Fuzzy-Logic System to
Optimize the Performances and the Reduction of Chattering Phenomenon in the Control of
Induction Motor’’ American Journal of Applied Sciences 7 (1): 110-119, ISSN 1546-9239
2010.

Références Bibliographiques
99
[41] Eid Al-radadi ‘’ Direct Torque Neuro Fuzzy Speed Control Of An Induction Machine
Drive Based On A New Variable Gain Pi Controller’’ Journal of Electrical Engineering,
Vol. 59, No. 4, 210-215,2008.
[42] Yüksel OĞUZ, İrfan GüNEY ‘’ Adaptive neuro-fuzzy inference system to improve the
power quality of variable-speed wind power generation system’’ Turk J Elec Eng & Comp
Sci, Vol.18, No.4, 2010.
[43] A.Merabet ’’Commande non linéaire à modèle prédictif pour une machine asynchrone ‘’
Thèse Doctorat Université Québec 2007
[44] K. Laroussi, M.Zelmat, Marc Rouff ‘’ Implementation of a Fuzzy Logic System to Tune
a PI Controller Applied to an Induction Motor’’ Advances in Electrical and Computer
Engineering Volume 9, 3, 2009
[45] L.Moussaoui ‘’Etude de La Commande de L’ensemble Machine Asynchrone-Onduleur à
Source de Courant’’ Thèse Doctorat université Batna 2007
[46] H.Boubacar ‘’ Prototypage Rapide A Base De FPGA D'un Algorithme De Contrôle
Avancé Pour Le Moteur A Induction’’ 2010 Université Québec
[47] A.Khlaief ‘’Contribution A La Commande Vectorielle Sans Capteurs Mécanique des
Machines Synchrones A Aimants Permanents (MSAP)’’ Thèse Doctorat université Aix-
Marseille 2012
[48] M. Chebre, M. Zerikat, Y. .Bendaha ‘’ Adaptation des Paramètres d’un Contrôleur PI
par un FLC Appliqué à un Moteur Asynchrone‘’ 4th international conference on computer
Integrated Manufacturing CIP 2007
[49] A.Hazzab, A. Laoufi, I. K. Bousserhane, M. Rahli ‘’ Real Time Implementation of Fuzzy
Gain Scheduling of PI Controller for Induction Machine Control’’ International Journal of
Applied Engineering Research ISSN 0973-4562 Vol.1 1, pp. 51-60, 2006
[50] I.K.BOUSSERHANE, A.HAZZAB, M.RAHLI, Benyounès MAZARI, M.KAMLI ‘’
Optimal Fuzzy Gains Scheduling Of Pi Controller For Induction Motor Speed Control’’ Acta
Electrotechnica et Informatica 1, Vol. 7, 2007
[51] S.Georges ’’ Contribution à la Commande Robuste de la Machine Asynchrone a Double
Alimentation ‘’ Thèse Doctorat université Toulouse 2007
[52] Sejir Khojet EDl Khil “Commande Vectorielle d’une Machine Asynchrone Doublement
Alimenté (MADA),”Thèse Doctorat université Toulouse 2006
[53] MathWorks, Neural Networks Toolbox User’s Guide, Math-Works, Natick, Mass, USA,
2015.
[54] F.Khammar , N.E.Debbache ‘’Application of Artificial Intelligence Techniques for the
Control of the Asynchronous Machine’’ Journal of Electrical and Computer Engineering

Références Bibliographiques
100
Article ID 8052027 ,2016.
[55] L.Rajaji, C. Kumar
, M. Vasudevan ‘’ Fuzzy And Anfis Based Soft Starter Fed Induction
Motor Drive For High Performance Applications’’ ARPN Journal of Engineering and
Applied Sciences VOL. 3, 4, ISSN 1819-6608, 2008.