course notes of earthquake
DESCRIPTION
earthquake engineering lecture notes which have given in this notes, seismic function and equation of wave action and function of ground moment and the stress and strain of the soil and dynamic vibration of the of the soil are given in this notes the lecture present in this book are taken from different reference the relativity of the other author are discussed. the totally engineering field are given in this notes.TRANSCRIPT

Overview:Seismicity, influence of soil conditions on site response, seismic site response analysis, evaluation and modeling of dynamic soil properties, analysis of seismic soil-structure interaction, evaluation and mitigation of soil liquefaction and its consequences, seismic code provisions and practice, seismic earth pressures, seismic slope stability and deformation analysis, seismic safety of dams and embankments, seismic performance of pile foundations, and additional current topics.
Course Material:Geotechnical Earthquake Engineering - Kramer•Lecture Notes•Handouts•Professional Papers•
Topics:
Design Spectra from Building Code•
2D Embankment Response (Simplified)•
Equivalent Linear Method•
Introduction to Nonlinear Methods•
Design of Buried Structures•
Design of Retaining Systems•
Earthquake Loadings on Shallow Foundations
•
Machine Vibrations•
Earthquake Loadings on Deep Foundations
•
Liquefaction•
Dynamic Slope Stability and Deformation Analyses
•
Course InformationThursday, March 11, 2010
11:43 AM
Course Information Page 1

Dr. Steven Bartlett Office - MCEB 2nd Floor, Office Phone: 587-7726 [email protected] Office Hours: M W 10:00 a.m. to 12:00 p.m. or by appointment (e mail) Web Site: http://www.civil.utah.edu/~cv7330/
Instructor:
B.S., 1983, Geology, BYU
Ph.D., 1992, Civil Engineering, BYU
Construction and Materials, Utah Department of Transportation
Senior Engineer, Westinghouse Savannah River Company
Project Engineer, Woodward Clyde Consultants
Research Project Manager, Utah Department of Transportation
Assistant Professor, University of Utah
Associate Professor, University of Utah
Professional Background:
T.A. none
Class Preparation:To facilitate the learning, each student will be required to read the assignment and be prepared to discuss in class the material that was read. Because it is nearly impossible to cover the material exactly according to the schedule, it is each student's responsibility to follow the lectures in class to determine what the appropriate reading assignment is for the next class period. PLEASE BRING THE TEXTBOOK, LECTURE NOTES, AND/OR OTHER APPROPRIATE REFERENCES TO EACH CLASS!
At various times during each lecture, students will be asked questions or be given the opportunity to answer questions posed by the instructor. Each student is expected to participate in these discussions during the lectures throughout the semester. Relevant information from students with practical working experience on a particular topic is encouraged. Sleeping or reading material, such as internet content not relevant to the class is not appropriate.
Course Information (cont.)Sunday, August 14, 2011
3:32 PM
Course Information Page 2

Course Level of EffortThis is an introductory graduate course and will be taught as such. The time requirement for such a course is considered to be 3 hours of out-of-class time for each hour of in-class time. The total time commitment to this class should then be 3 hours (in-class) and 9 hours (out-of-class) for a total of 12 hours per week.
AttendanceNo seats will be assigned and no attendance taken during the semester. However, attendance at the lectures is necessary to learn the material. Non-attendance decreases the amount of time you spend on the course and reduces the quality of your educational experience. You are responsible for all announcements and material covered in class. Also, examination questions will come from items covered in lecture that may not be present on the course notes or textbook.
Grading
Course Grading (Total Score from All Assignments and Exams)
Weight (%) Grade Grade Score (% of class total)
Homework 50% A 94-100 A- 90-93
Midterm Exam I 20% B+ 87-89 B 84-86
Midterm Exam II 30% B - 80-83 C+ 77-79
Final Exam 25% C 74-76 C- 70-73
D+ 67-69 D 64-66
D- 60-63 E < 60
Course Information (cont.)Sunday, August 14, 20113:32 PM
Course Information Page 3

Homework:CVEEN Dept. has adopted formatting rules that will be followed. They are posted on the course web site. Homework is due at the beginning of class on the due date. Homework assignments will be accepted up to 2 class periods after the due date but will be assessed a penalty of 20% per class period. For example, if homework is due on Tuesday morning and it is turned in on Thursday morning, then a 20% late penalty will be assessed. Homework that is more than one week late will receive 50 percent credit and will not be checked.
All assignments must have the following signed pledge at the front of the assignment:
On my honor as a student of the University of Utah, I have neither given nor received unauthorized aid on this assignment.
If the pledge is missing or is not signed, the assignment will not be graded.By signing this pledge, you are certifying that the homework is your own work.
This is a graduate level class and working in groups or receiving help from others is not allowed unless directed by the instructor.
A grade of zero for the course will be given on any homework or exam questions that have been copied from someone else or where unauthorized help has been received.
Course Information (cont.)Sunday, August 14, 2011
3:32 PM
Course Information Page 4

Course Information○
Lecture Notes○
Pp. 73 - 75 Kramer○
Appendix B7 Kramer○
Reading Assignment
Responsespectra.pdf (Chopra)○
ASCE 7-05.pdf○
Other Materials
Baseline correct the time history and plot the acceleration, velocity and displacement records. Use the quadratic function for the baseline correction. (5 points)
□
Determine peak ground acceleration (pga) from the time history. (5 points)
□
Develop and plot a pseudo acceleration response spectrum for this record at 5 percent damping using Seismosignal. (5 points)
□
Determine the predominate period. (5 points)□
Scale the record by 1.5 (increase the acceleration values by 50 percent) and replot the pseudo acceleration response spectrum. (5 points)
□
For the Sakaria acceleration time history do the following:
Install Seismosignal software on your computer○
Install the ground motion hazards program from the United States Geological Survey on your computer http://earthquake.usgs.gov/hazards/designmaps/javacalc.php
○
Use this software to find the Ss and S1 values for the Meldrum Civil Engineering Building (MCEB). (10 points)
○
Assume the MCEB is found on a site class C soil.
Show all calculations and inputs to calculations. Check your solution against the design spectrum calculated by the USGS java calculator.
Use the Ss and S1 values above and ASCE 7-05 to develop a design spectrumfor the MCEB. (20 points)
○
Homework Assignment #1
© Steven F. Bartlett, 2011
Design SpectraSunday, August 14, 2011
3:32 PM
Design Spectra Page 5

© Steven F. Bartlett, 2011
Design Spectra (cont.)Sunday, August 14, 2011
3:32 PM
Design Spectra Page 6

© Steven F. Bartlett, 2011
Effects of Damping on Response Spectra3:32 PM
Design Spectra Page 7

Design Spectra Page 8

Empirical attenuation relations (CVEEN 6330)○
Building code design spectra (CVEEN 6330 and CVEEN 7330)○
Equivalent Linear Techniques (computer program SHAKE or DEEPSOIL) (CVEEN 7330)
FEM (finite element methods) (computer program DEEPSOIL)(CVEEN 7330)
□
FDM (finite difference methods) (computer program FLAC) (CVEEN 6330 and CVEEN 7330)
□
Nonlinear Techniques (CVEEN 6330 and CVEEN 7330)
Ground Response Analyses (CVEEN 6330 and CVEEN 7330)○
Methods of Developing Design Spectra and Design Strong Motion
© Steven F. Bartlett, 2011
Development of Design Spectra (cont.)Sunday, August 14, 2011
3:32 PM
Design Spectra Page 9

An acceleration response spectrum, such as that above, is widely used in geotechnical and structural engineering.
○
It expresses the maximum acceleration response of a single degree of freedom system (SDOF) as a function of period for a given level of structural damping (usually 5 percent, unless otherwise stated.)
○
The above spectrum is not a design spectrum. It is jagged because it represents a spectrum for a given time history.
○
Seismosignal is recommended□
Software is usually used to do this conversion.
An acceleration time history can be converted to an acceleration response spectrum which represents the response of the SDOF for the given input motion.
○
Important Concepts:
Damp. 5.0%
Period [sec]
3210
Response A
ccele
ratio
n [g]
1.8
1.7
1.6
1.5
1.4
1.3
1.2
1.1
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Time [sec]
876543210
Accele
ratio
n [g]
0.8
0.6
0.4
0.2
0
-0.2
-0.4
Acceleration time history
Acceleration Response Spectrum for above time history from Seismosignal TM
© Steven F. Bartlett, 2011
Plotting Response Spectra for an Earthquake (cont.)Sunday, August 14, 2011
3:32 PM
Design Spectra Page 10

Ss and S1 are obtained from the United States Geological Survey National Strong Motion Program. The link for this computer program (Java Script) is given in the homework assignment.
© Steven F. Bartlett, 2011
Development of Design Spectra ASCE 7-05Sunday, August 14, 2011
3:32 PM
Design Spectra Page 11

© Steven F. Bartlett, 2011
ASCE 7-05 (cont.)Sunday, August 14, 2011
3:32 PM
Design Spectra Page 12

© Steven F. Bartlett, 2011
ASCE 7-05 (cont.)Sunday, August 14, 2011
3:32 PM
Design Spectra Page 13

0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
1.10
1.20
1.30
1.40
1.50
1.60
1.70
1.80
1.90
2.00
2.10
0 0.5 1 1.5 2
Sp
ec
tral ac
ce
lera
tio
n (g
)
Period (s)
Generic Design Spectrum from ASCE 7-05
ASCE 7-05 Spectrum - Site Class D
Sa =0.4 SDS a T = 0 Sa = pga
To Sa = SDS
Ts = SD1/SDS
Sa = SD1/T
© Steven F. Bartlett, 2011
ASCE 7-05 (cont.)Sunday, August 14, 2011
3:32 PM
Design Spectra Page 14

ASCE 7-05 (cont.)3:32 PM
Design Spectra Page 15

Blank3:32 PM
Design Spectra Page 16

Lecture Notes○
Pp. 255 - 275 Kramer (EQL method)○
p. 562 Kramer (Trigonometric Notation - Fourier Series)○
Shake Theory.pdf○
Reading Assignment
Bray and Travasarou - 2007 (Optional)○
Other Materials
Homework Assignment #2
Given the attached embankment properties and the attached shear modulus reduction and damping curve and the attached acceleration response spectra, determine the maximum crest acceleration (g) of the embankment (30 points)
1.
For the information in problem 1, make a plot of embankment displacement, U in meters, as a function of yield acceleration, ky, for a M = 7.5 earthquake. In constructing this plot, assume that the bottom of the critical failure circle is found at the toe of the embankment (10 points).
2.
If the yield acceleration, ky, for the above embankment is 0.1 g, calculate the amount of deformation that is expected using the information given in problem 2 (5 points).
3.
© Steven F. Bartlett, 2011
2D Embankment and Slope Analysis Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 17

Homework inputs
© Steven F. Bartlett, 2011
2D Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 18

Homework inputs
© Steven F. Bartlett, 2011
2D Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 19

Homework inputs
© Steven F. Bartlett, 2011
2D Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 20

© Steven F. Bartlett, 2011
Pseudostatic Analysis○
Makdisi and Seed (1978) used average acceleratins computed by the procedure of Chopra (1966) and sliding block analysis to compute earthquake-induced deformations of earth dams and embankments.
Newmark Sliding Block Analysis○
FEM
FDM
Deformation Based Analysis○
General Types of AnalysisSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 21

Pseudostaic apply a static (non-varying) force the centroid of mass to represent the dynamic earthquake force.
○
Fh = ah W / g = kh W
Fv = av W/ g = kv W (often ignored)
© Steven F. Bartlett, 2011
Selection of Kh
Pseudostatic AnalysisSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 22

Recommendations for implementation of pseudostatic analysis (Bartlett)
General comment: The pseudostatic technique is dated and should only be used for screening purposes. More elaborate techniques are generally warranted and are rather easy to do with modern computing and software.
© Steven F. Bartlett, 2011
Representation of the complex, transient, dynamics of earthquake shaking by a single, constant, unidirectional pseudostatic acceleration is quite crude.
○
Method has been shown to be unreliable for soils with significant pore pressure buildup during cycling (i.e., not valid for liquefaction).
○
Some dams have failed with F.S. > 1 from the pseudostatic technique○
Cannot predict deformation.○
Is only a relative index of slope stability○
Limitations of Pseudostatic Technique
Pseudostatic Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 23

© Steven F. Bartlett, 2011
Layer (top
to
bottom)
(kN/m3)
γ (lb/ft3) E (kPa) v K (kPa) G (kPa) φ c (kPa) Ko Vs (m/s)
1 15.72 100 100000 0.37 128,205 36,496 24.37 0 0.5873 150.9
2 16.51 105 100000 0.37 128,205 36,496 24.37 0 0.5873 147.3
3 17.29 110 150000 0.35 166,667 55,556 27.49 0 0.5385 177.5
4 18.08 115 200000 0.3 166,667 76,923 34.85 0 0.4286 204.3
5 18.08 115 250000 0.3 208,333 96,154 34.85 0 0.4286 228.4
emban 21.22 135 300000 0.3 250,000 115,385 34.85 0 0.4286 230.9
Pasted from <file:///C:\Users\sfbartlett\Documents\GeoSlope\miscdynamic1.xls>
Example Geometry
Example Soil Properties
E = Young's Modulus
= Poisson's ratioK = Bulk modulusG = Shear Modulus = drained friction anglec = cohesionKo = at-rest earth pressure coefficentVs = shear wave velocity
Pseudostatic Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 24

© Steven F. Bartlett, 2011
Pseudostatic Results
FS = 1.252 (static with no seismic coefficient, Kh)
The analysis has been repeated by selecting only the critical circle. To do this, only one radius point. This result can then be used with a Kh value to determine the factor of safety, FS.
Pseudostatic Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 25

© Steven F. Bartlett, 2011
Time [sec]
161514131211109876543210
Accele
ratio
n [g]
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
-0.2
-0.3
-0.4
Acceleration time history
Damp. 5.0%
Period [sec]
3210
Response A
ccele
ratio
n [g]
1.4
1.35
1.3
1.25
1.2
1.15
1.1
1.05
1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0.5
0.45
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
Response Spectrum for acceleration time history
pga = 0.6 gKh = 0.5 * pgaKh = 0.3 g (This is applied in the software as a horizontal acceleration).
Pseudostatic Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 26

© Steven F. Bartlett, 2011
Reduce shear strength in stability model for all saturated soils to 80 percent of peak strength as recommended by the Army Corp of Engineers. This is to account for pore pressure generation during cycling of non-liquefiable soils. (See table below.) (If liquefaction is expected, this method is not appropriate.)
Layer
(top to
bottom)
(kN/m3)
γ (lb/ft3) E (kPa) v K (kPa) G (kPa) φ Tan
φ
80
percent
Tan
φ
New
phi
angle
for
analysis
1 15.72 100 100000 0.37 128,205 36,496 24.37 0.4530 0.3624 19.92
2 16.51 105 100000 0.37 128,205 36,496 24.37 0.4530 0.3624 19.92
3 17.29 110 150000 0.35 166,667 55,556 27.49 0.5203 0.4162 22.60
4 18.08 115 200000 0.3 166,667 76,923 34.85 0.6963 0.5571 29.12
5 18.08 115 250000 0.3 208,333 96,154 34.85 0.6963 0.5571 29.12
embank 21.22 135 300000 0.3 250,000 115,385 34.85 0.6963 0.5571 29.12
Pasted from <file:///C:\Users\sfbartlett\Documents\GeoSlope\miscdynamic1.xls>
The analysis is redone with Kh = 0.3 and reduced shear strength (see below).
12345678910
11
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
51 52 53 54 55 56 57 58 59 60
61 62 63 64 65 66 67 68 69 70
71 72 73 74 75 76 77 78 79 80
81 82 83 84 85 86 87 88 89 90
91 92 93 94 95 96 97 98 99 100
101 102 103 104 105 106
107108 109 110 111 112
113114115116117118
119120 121 122 123 124
125 126 127 128129 130
131 132 133 134 135136
137 138 139 140 141142143 144 145 146 147148
149 150 151 152 153154
0.651
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
The resulting factor of safety is 0.651 (too low). Deformation is expected for this system and should be calculated using deformation analysis (e.g., Newmark, Makdisi-Seed, FEM, FDM methods.)
Pseudostatic Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 27

Pasted from <http://pubs.usgs.gov/of/1998/ofr-98-113/ofr98-113.html>
© Steven F. Bartlett, 2011
Newmark’s method treats a landslide as a rigid-plastic body; that is, the mass does not deform internally, experiences no permanent displacement at accelerations below the critical or yield level, and deforms plastically along a discrete basal shear surface when the critical acceleration is exceeded. Thus, Newmark’s method is best applied to translational block slides and rotational slumps. Other limiting assumptions commonly are imposed for simplicity but are not required by the analysis (Jibson, TRR 1411).
1. The static and dynamic shearing resistance of the soil are assumed to be the same. (This is not strictly true due to strain rate effects.)2. In some soils, the effects of dynamic pore pressure are neglected. This assumption generally is valid for compacted or overconsolidated clays and very dense or dry sands. This is not valid for loose sands or normally consolidated, or sensitive soils.3. The critical acceleration is not strain dependent and thus remains constant throughout the analysis.4. The upslope resistance to sliding is taken to be infinitely large such that upslope displacement is prohibited. (Jibson, TRR 1411)
Newmark Sliding Block AnalysisSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 28

Steps
Perform a slope stability analysis with a limit equilibrium method and find the critical slip surface (i.e., surface with the lowest factor of safety) for the given soil conditions with no horizontal acceleration present in the model.
1.
Determine the yield acceleration for the critical slip circle found in step 1 by applying a horizontal force in the outward direction on the failure mass until a factor of safety of 1 is reached for this surface. This is called the yield acceleration.
2.
Develop a 2D ground response model and complete 2D response analysis for the particular geometry. Use this 2D ground response analysis to calculate average horizontal acceleration in potential slide mass.
3.
Consider horizontal displacement is possible for each time interval where the horizontal acceleration exceeds the yield acceleration (see previous page).
4.
Integrate the velocity and displacement time history for each interval where the horizontal acceleration exceeds the yield acceleration (see previous page).
5.
The following approach is implemented using the QUAKE/WTM and SLOPE/WTM.
© Steven F. Bartlett, 2011
Acceleration vs. time at base of slope from 2D response analysis in Quake/W.
Newmark Sliding Block Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 29

2D Embankment Analysis Page 30

Analysis perfromed using shear strength = 100 percent of peak value for all soils (i.e., no shear strength loss during cycling).
12345678910
11
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
51 52 53 54 55 56 57 58 59 60
61 62 63 64 65 66 67 68 69 70
71 72 73 74 75 76 77 78 79 80
81 82 83 84 85 86 87 88 89 90
91 92 93 94 95 96 97 98 99 100
101 102 103 104 105 106
107108 109 110 111 112
113114115116117118
119120 121 122 123 124
125 126 127 128129 130
131 132 133 134 135136
137 138 139 140 141142143 144 145 146 147148
149 150 151 152 153154
1.530
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
Factor of Safety vs. Time
Fa
cto
r of
Safe
ty
Time
1.0
1.2
1.4
1.6
1.8
2.0
0 5 10 15 20
Note that the same circle is used as obtained from the pseudostatic analysis !
Newmark Sliding Block Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 31

© Steven F. Bartlett, 2011
2D Embankment Analysis Page 32

Analysis repeated using shear strength = 80 percent of peak value for all soils to account for some pore pressure generation during cycling.
© Steven F. Bartlett, 2011
12345678910
11
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
51 52 53 54 55 56 57 58 59 60
61 62 63 64 65 66 67 68 69 70
71 72 73 74 75 76 77 78 79 80
81 82 83 84 85 86 87 88 89 90
91 92 93 94 95 96 97 98 99 100
101 102 103 104 105 106
107108 109 110 111 112
113114115116117118
119120 121 122 123 124
125 126 127 128129 130
131 132 133 134 135136
137 138 139 140 141142143 144 145 146 147148
149 150 151 152 153154
1.365
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
Factor of Safety vs. Time
Fa
cto
r of
Safe
ty
Time
1.0
1.2
1.4
1.6
1.8
0 5 10 15 20
Newmark Sliding Block Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 33

Analysis repeated using shear strength in layer 1 equal to 5 kPa (100 psf) to represent a quick clay that has liquefied.
© Steven F. Bartlett, 2011
12345678910
11
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
1 2 3 4 5 6 7 8 9 10
11 12 13 14 15 16 17 18 19 20
21 22 23 24 25 26 27 28 29 30
31 32 33 34 35 36 37 38 39 40
41 42 43 44 45 46 47 48 49 50
51 52 53 54 55 56 57 58 59 60
61 62 63 64 65 66 67 68 69 70
71 72 73 74 75 76 77 78 79 80
81 82 83 84 85 86 87 88 89 90
91 92 93 94 95 96 97 98 99 100
101 102 103 104 105 106
107108 109 110 111 112
113114115116117118
119120 121 122 123 124
125 126 127 128129 130
131 132 133 134 135136
137 138 139 140 141142143 144 145 146 147148
149 150 151 152 153154
0.944
1
2 3
4
5678910
111213141516171819202122
23
24 25 2627
2829
3031
3233
34
35
36
Factor of Safety vs. Time
Fa
cto
r of
Safe
ty
Time
0.8
0.9
1.0
1.1
1.2
0 5 10 15 20
Note FS < 1 for a significant part of the time history.
Deformation vs. Time
De
form
atio
n
Time
0.0
0.5
1.0
1.5
2.0
2.5
0 5 10 15 20
Note that more than 2 m of displacement have accumulated.
Newmark Sliding Block Analysis (cont.)Sunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 34

Note that more than 2 m of displacement have accumulated.
2D Embankment Analysis Page 35

2D Embankment Analysis Page 36

2D Embankment Analysis Page 37

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 38

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 39

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 40

© Steven F. Bartlett, 2011
Eq. 1
Eq. 2
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 41

© Steven F. Bartlett, 2011
Eq. 3
Eq. 3a
Eq. 4
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 42

© Steven F. Bartlett, 2011
Eq. 5
Eq. 6
Eq. 7a
Eq. 7b
Eq. 7c
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 43

© Steven F. Bartlett, 2011
Eq. 8
Eq. 9
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 44

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 45

© Steven F. Bartlett, 2011
Eq. 10
Makdisi - Seed Analysis - Crest AcceleratiSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 46

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 47

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 48

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 49

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 50

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - Crest AccelerationSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 51

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - DeformationsSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 52

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - DeformationsSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 53

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - DeformationsSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 54

© Steven F. Bartlett, 2011
Makdisi - Seed Analysis - DeformationsSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 55

Better chart for previous page
© Steven F. Bartlett, 2011
Interpolation on semi-log plot
If U/kh(max)gT is halfway between 0.01 and 0.1, then the exponent value for this number is -1.5 (see red arrow on graph above). This can be converted back by 1 x 10-1.5 which is equal to 3.16 x 10-2.
Exponent
Makdisi - Seed Analysis - DeformationsSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 56

Example
Design Spectra
© Steven F. Bartlett, 2011
Values in red must be adjusted until convergenceIs obtained
Makdisi - Seed Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 57

© Steven F. Bartlett, 2011
Shear modulus reduction and damping curves
Calculations
Makdisi - Seed Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 58

© Steven F. Bartlett, 2011
Calculations (cont.)
Charts for deformation analysis
Z = depth to base of potential failure plane (i.e., critical circle from pseudostatic analysis)
Makdisi - Seed Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 59

© Steven F. Bartlett, 2011
(See regression equations on next page for M7.5 and M6.5 events
Makdisi - Seed Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 60

y = 1.7531e-8.401x
R² = 0.988
0.00
0.20
0.40
0.60
0.80
1.00
1.20
1.40
1.60
1.80
2.00
0 0.2 0.4 0.6 0.8 1
U /
(kh
ma
x*g
*T1)
ky/khmax
Deformation versus ky/kymax curve for M = 7.5
y = 0.7469e-7.753x
R² = 0.9613
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0 0.2 0.4 0.6 0.8 1
U /
(kh
ma
x*g
*T1)
ky/khmax
Deformation versus ky/kymax curve for M = 6.5
Makdisi - Seed Analysis - ExampleSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 61

BlankSunday, August 14, 2011
3:32 PM
2D Embankment Analysis Page 62

Lecture Notes○
Pp. 423 - 449 Kramer○
Pp. 286-290 Kramer - Shear Beam Approach○
Makdisi-Seed Analysis (EERC).pdf○
Reading Assignment
Bray and Travasarou - 2007 (Optional)○
Other Materials
Homework Assignment #3
Download and install DEEPSOIL v.4.0 on your computer. (10 points)1.
Use the fault normal component of this scaled recorda.Plot the scaled acceleration time historyb.Plot the scaled response spectrum c.
Obtain the Matahina Dam, New Zealand record from the PEER database and scale it to a design target spectrum using the parameters shown in this lecture. (20 points)
2.
For sands, use Seed and Idriss upper bound curvesa.For silts, use Vucetic and Dorby curves with PI = 0b.For clays, use Vucetic and Dorby curves with PI = 20c.Treat layer 18 as a clay with PI = 20d.Treat layer 19 as a sande.For the bedrock velocity, use the velocity corresponding to the deepest Vs measurement in the soil profile with 2 percent damping
f.
Develop a soil profile for ground response analysis using soil properties for the I-15 project at 600 South Street (see attached). The shear wave velocity data are also available on the website as: SLCvsprofile.xls. (20 points)
3.
Response spectrum summary a.Acceleration time histories for layer 1 b.pga profilec.Convergence checkd.
Perform a site-specific, equivalent-linear (EQL) ground response analysis for this soil profile and provide the following plots: (10 points)
4.
© Steven F. Bartlett, 2011
1D Equivalent Linear (EQL) MethodSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 63

© Steven F. Bartlett, 2011
0
5
10
15
20
25
30
35
40
45
50
55
60
65
0 100 200 300 400 500 600 700
de
pth
(m
)
Vs (m/s)
SHALLOW PROFILE: 0 - 65m
SLC Airport East, Wong & Silva (1993)
Lacustrine-alluvial silt and clay (Northern CA Bay
Mud), Wong et al. (2002, published)
Ashland & Rollins average
Ashland & Rollins + 1SD
Ashland & Rollins - 1SD
600 South, Gerber (1995)
I-80, Gerber (1995)
Homework Assignment AttachmentSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 64

© Steven F. Bartlett, 2011
Homework Assignment AttachmentSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 65

© Steven F. Bartlett, 2011
Homework Assignment AttachmentSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 66

© Steven F. Bartlett, 2011
Homework Assignment AttachmentSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 67

Dynamic behavior of soils is quite complex and requires models which characterize the
1.
important aspects of cyclic behavior, but need to be simple, rational models.Three classes of dynamic soil models:2.a) equivalent linearb) cyclic nonlinearc) advanced constitutive
vertically 1-D propagation of shear waves in a multi-layered system is assumed in SHAKE.
○
SHAKE produces an approximation to the nonlinear response of soils under earthquake loading, but is very efficient computationally.
○
nonlinear stress strain loop is approximated by a single equivalent linear modulus that decreases with increasing strain and by an estimated damping ratio that increases with strain.
○
SHAKE cannot be used directly to solve problems involving ground deformation (linear model, which does not follow the hysteresis loop to model strain)
○
final strain is zero (after cycling has stopped).○
no limiting value in shear strength, so failure is not allowed to occur in the model
○
The equivalent linear method has been developed in the program SHAKE.3.
© Steven F. Bartlett, 2011
1D Equivalent Linear MethodSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 68

1D Wave Equation for elastic material
1D Wave Equation for visco-elastic material
Damping in a Visco-elastic material
© Steven F. Bartlett, 2011
1D Wave EquationSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 69

© Steven F. Bartlett, 2011
Visco-elastic modelSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 70

© Steven F. Bartlett, 2011
Visco-elastic model (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 71

© Steven F. Bartlett, 2011
Visco-elastic model (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 72

Express the input (rock outcrop) motion in the frequency domain as a Fourier series (as the sum of a series of sine waves of different amplitudes, frequencies, and phase angles). For an earthquake motion, this Fourier series will have both real and imaginary parts.
1.
Define the transfer function . The transfer function will have both real and imaginary parts.
2.
Compute the Fourier series of the output (ground surface) motion as the product of the Fourier series of the input (bedrock) motion and the transfer function. This Fourier series will also have both real and imaginary parts.
3.
Express the output motion in the time domain by means of an inverse Fourier4.transform.Calculate the shear strains from the displacement output of 4. Verify that the strain is compatible with the assumed shear modulus and damping values assumed. If not, iterate until strain compatible properties are obtained by changing the estimate of the effective shear modulus and associated damping.
5.
© Steven F. Bartlett, 2011
Equivalent Linear MethodSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 73

© Steven F. Bartlett, 2011
http://peer.berkeley.edu/peer_ground_motion_database/
Input Motion - Time DomainSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 74

© Steven F. Bartlett, 2011
Search Criteria for Earthquake Records
Input Motion - Time Domain (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 75

© Steven F. Bartlett, 2011
Search Results
Input Motion - Time Domain (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 76

© Steven F. Bartlett, 2011
Note that the fault normal component of the Matahina Dam, New Zealand has a response spectrum that is generally above the target spectrum. It would be a good candidate for analysis, if we are only using 1 record.
Fault normal component
Double click on individual record to show its components
Input Motion - Time Domain (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 77

© Steven F. Bartlett, 2011
Fault normal component of the Matahina Dam, New Zealand
Input Motion - Time Domain (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 78

© Steven F. Bartlett, 2011
Fourier TransformSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 79

© Steven F. Bartlett, 2011
Frequency [Hz]
0.1 1 10
Fourier
Am
plit
ude
0.14
0.13
0.12
0.11
0.1
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
Fourier amplitude spectrum from Seismosignal for the Matahina Dam, New Zealand record.
The Fourier amplitude values (y-axis) are equal to the cn values in the above equation.
In addition to a Fourier amplitude spectrum there is also a corresponding Fourier phase spectrum that gives the phase angle as a function of frequency. Unfortunately, Seismosignal does not provide this plot.
Fourier Transform (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 80

© Steven F. Bartlett, 2011
Example
The Fourier series can be used to match any periodic function, if enough terms are included.
For example, lets use a Fourier series to generate a square function of the form:
2
-2
A = 2
Tf = 1
6.283185
to=
dt= 0.01
Pasted from <file:///C:\Users\sfbartlett\Documents\My%20Courses\6330\Fourier_sqwave.xls>
A = amplitudeTf = time of function (duration)
Frequency (rad/s)dt = time step (s)
-3.00
-2.00
-1.00
0.00
1.00
2.00
3.00
0.00 0.20 0.40 0.60 0.80 1.00 1.20
Blue line equals sum of series for 13 terms
Other lines shows the individual terms.
Fourier Transform (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 81

© Steven F. Bartlett, 2011
a1=4A/(n*pi) = 2.546479
a2 = 0
a3 = -0.84883
a4 = 0
a5 = 0.509296
a6 = 0
a7 = -0.36378
a8 = 0
a9 = 0.282942
a10= 0
a11= -0.2315
a12= 0
a13 0.195883
Pasted from <file:///C:\Users\sfbartlett\Documents\My%20Courses\6330\Fourier_sqwave.xls>
Amplitude of each of the terms in the series. For this case the even terms are not needed, so their Fourier amplitude is set to zero for the even terms.
an = 4A/(n*pi)
an
t 1st term
3rd term
5th term
7th term
9th term
11th term
13th term
sum
0.00 2.55 -0.85 0.51 -0.36 0.28 -0.23 0.20 2.09
0.01 2.54 -0.83 0.48 -0.33 0.24 -0.18 0.13 2.06
0.02 2.53 -0.79 0.41 -0.23 0.12 -0.04 -0.01 1.98
0.03 2.50 -0.72 0.30 -0.09 -0.04 0.11 -0.15 1.92
0.04 2.47 -0.62 0.16 0.07 -0.18 0.22 -0.19 1.91
0.05 2.42 -0.50 0.00 0.21 -0.27 0.22 -0.12 1.97
0.06 2.37 -0.36 -0.16 0.32 -0.27 0.12 0.04 2.05
0.07 2.30 -0.21 -0.30 0.36 -0.19 -0.03 0.17 2.10
0.08 2.23 -0.05 -0.41 0.34 -0.05 -0.17 0.19 2.07
0.09 2.15 0.11 -0.48 0.25 0.10 -0.23 0.09 1.99
0.10 2.06 0.26 -0.51 0.11 0.23 -0.19 -0.06 1.91
0.11 1.96 0.41 -0.48 -0.05 0.28 -0.06 -0.18 1.89
0.12 1.86 0.54 -0.41 -0.19 0.25 0.10 -0.18 1.95
0.13 1.74 0.65 -0.30 -0.31 0.14 0.21 -0.07 2.06
0.14 1.62 0.74 -0.16 -0.36 -0.02 0.22 0.08 2.14
0.15 1.50 0.81 0.00 -0.35 -0.17 0.14 0.19 2.11
0.16 1.36 0.84 0.16 -0.27 -0.26 -0.01 0.17 1.99
0.17 1.23 0.85 0.30 -0.13 -0.28 -0.16 0.05 1.85
0.18 1.08 0.82 0.41 0.02 -0.21 -0.23 -0.10 1.80
Pasted from <file:///C:\Users\sfbartlett\Documents\My%20Courses\6330\Fourier_sqwave.xls>
Note because of space limitations only the first 0.18 s of the series is shown here.
Fourier Transform (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 82

© Steven F. Bartlett, 2011
Fourier Transform (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 83

© Steven F. Bartlett, 2011
Development of Transfer Function - Function to relate base rock motion to surface soil motion.
Transfer FunctionsSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 84

Transfer Functions (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 85

The same process can be used to calculate the transfer functions for a multiple layer system.
Transfer function for 2-layer system(rock and soil)
Transfer Functions (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 86

© Steven F. Bartlett, 2011
For more details, see Shake Theory.pdf
Transfer Functions (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 87

© Steven F. Bartlett, 2011
Period function (earthquake acceleration time history)a.Fast Fourier transform (FFT) yield Fourier series with 2n termsb.Each term of the Fourier series is inputted into transfer function.c.The transfer function is used to calculate the soil response for each layer (i.e., complex response) and is represented for each term in the series.
d.
The complex response with all it terms is converted back into a single response by use an inverse Fast Fourier transform (IFFT).
e.
Once this is completed, the program checks to see if the G (shear modulus) and D damping are consistent with those assumed at the beginning of the analysis, if not then the program adjust the input G and D values and recalculates the associated strain until convergence is achieved.
Transfer Functions (cont.)Sunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 88

Goal of Equivalent Linear Analysis is to determine values of Gsec and equivalent damping that are consistent for each soil layer with the level of strain produced in that layer. These are called strain compatible properties.
○
Note that the transfer functions develop on the previous pages are only valid only for an elastic material and prescribed damping
○
However, a nonlinear system can be express by using the secant shear modulus, Gsec and equivalent damping
○
Hysteretic behavior approximated by Gsec and equivalent damping○
Equivalent damping is the damping ratio that produces the same energy loss in a single cycle as the equivalent actual hysteresis loop
○
Earthquakes produce earthquake motion that is highly irregular with a peak amplitude that may only be approached in a few spikes in the record.
○
As a result, it is common practice to characterize the effective strain level of a transient record as 50 to 70 percent of the peak value, based on statistical analysis of the number of significant cycles in earthquake records and a comparison of their peaks with the maximum peak.
○
Usually a value of 0.65 is used for the effective strain level in practice. The results, however are not very sensitive to this assumed value.
○
Iteration to Determine Strain Compatible PropertiesSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 89

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
1D Equivalent Linear Method Page 90

Lecture Notes○
Reading Assignment
Ostadan and White paper○
Wu and Finn paper○
Other Materials
© Steven F. Bartlett, 2011
Homework Assignment #4
Calculate the dynamic thrust against a buried rigid wall using the Ostadan-White method for a buried structure that is 10 m below the ground surface. (20 points)
a.
Calculate the dynamic pressure distribution to be applied against the buried structure using the Ostadan-White method for the same structure. Show this distribution versus depth on a depth plot. (10 points)
b.
Use the DEEPSOIL ground response model and acceleration time history developed in the previous homework assignment to do the following:
1.
Use the Wu-Finn method to calculate the dynamic thrust against the same buried rigid wall in problem 1. (20 points)
2.
Use the M-O method to estimate the factor of safety against sliding and overturning for a gravity wall using the acceleration time history from homework assignment 3. (20 points)
3.
The wall is a yielding wall retaining wall and is 4 m high and is 1 m thick at the base and tapers to 0.6 m at the top. The retained backfill behind the is flat (i.e., horizontal) and has a unit weight of 22 kN/m^3 with a drained friction angle of 35 degrees and the backfill is unsaturated. Also, the base of the wall rests on backfill material and is embedded 0.6 m in this material at its base.
Assume that the horizontal acceleration used in the design is 50 percent of the peak ground acceleration. You may also neglect the vertical component of acceleration.
PressuresSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 91

© Steven F. Bartlett, 2011
Coulomb TheorySunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 92

© Steven F. Bartlett, 2011
Mononobe - Okabe - Active CaseSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 93

© Steven F. Bartlett, 2011
Mononobe - Okabe - Active Case (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 94

© Steven F. Bartlett, 2011
Mononobe - Okabe Passive CaseSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 95

© Steven F. Bartlett, 2011
the base.
Seed and Whitman - Simplified MethodSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 96

© Steven F. Bartlett, 2011
Gravity Wall ExampleSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 97

© Steven F. Bartlett, 2011
Gravity Wall ExampleSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 98

© Steven F. Bartlett, 2011
Non-Yielding WallsSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 99

© Steven F. Bartlett, 2011
Non-Yielding Walls (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 100

© Steven F. Bartlett, 2011
Non-Yielding Walls -Observations from EarthquakesSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 101

© Steven F. Bartlett, 2011
Non-Yielding Walls - Ostadan and WhiteSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 102

© Steven F. Bartlett, 2011
Non-Yielding Walls - Ostadan and White (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 103

© Steven F. Bartlett, 2011
Non-Yielding Walls - Ostadan and White (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 104

© Steven F. Bartlett, 2011
Non-Yielding Walls - Ostadan and White (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 105

Dynamic Earth Pressure Page 106

Dynamic Earth Pressure Page 107

Dynamic Earth Pressure Page 108

© Steven F. Bartlett, 2011
Non-Yielding Walls - Ostadan and White (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 109

© Steven F. Bartlett, 2011
Non-Yielding Walls - Ostadan and White (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 110

© Steven F. Bartlett, 2011
Perform seismic ground response analysis (using SHAKE) and obtain the acceleration response spectrum at the base mat level in the free-field at 30% damping.
1.
Obtain the total mass using:2.
m = 0.50 ρ H2 Ψν
Obtain the total seismic lateral force by multiplying the mass from Step 2 by the spectral amplitude of the free-field response (Step 1) at the soil
3.
column frequency.
F = m Sa
where Sa is the spectral acceleration at the base mat level for the free field at the fundamental frequency of the soil column with 30 percent damping.
Calculate the maximum lateral earth pressure (ground surface) by dividing the results for step 3 by the area under the normal soil pressure curve (normalized area = 0.744 H)
4.
Calculate the lateral pressure distribution verses depth by multiply the max. lateral earth pressure by the p(y) function below.
5.
p(y) = - .0015 + 5.05y - 15.84y2 + 28.25y3 - 24.59y4 + 8.14y5
where y is the normalized height (Y/H) measured from thebase of the wall.
Ostadan and White (Steps)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 111
© Steven F. Bartlett, 2011
The method was verified by comparing the results of the simple computational steps with the direct solution from SASSI.
•
The verification included 4 different wall heights, 6 different input time histories and 4 different soil properties.
•
The method is very simple and only involves free-field (e.g. SHAKE) analysis and a number of hand computational steps.
•
The method has been adopted by building code (NEHRP 2000) and will be included in the next version of ASCE 4-98.
•
The Ostadan-White method is by no means a complete solution to the seismic soil pressure problem. It is merely a step forward at this time.
•
Solution! Perfect isolation!
Ostadan and White (Summary)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 112

© Steven F. Bartlett, 2011
Wu and FinnSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 113

© Steven F. Bartlett, 2011
Analytical Solution - Homogenous Backfill - Shear Beam TheorySunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 114

© Steven F. Bartlett, 2011
Analytical Solution (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 115

© Steven F. Bartlett, 2011
Analytical Solution (cont.)Sunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 116

© Steven F. Bartlett, 2011
Finite element model by Wu and Fin
Wu and Finn - Numerical ModelSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 117

© Steven F. Bartlett, 2011
Comparison of Analytical Solution with FE Modeling -Homogeneous Backfill - Non Harmonic MotionSunday, August 14, 20113:32 PM
Dynamic Earth Pressure Page 118

© Steven F. Bartlett, 2011
Solution for simple harmonic motion
Solutions for Non-homogeneous backfillSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 119

Non Harmonic MotionSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 120

© Steven F. Bartlett, 2011
Dynamic Earth Pressure Page 121

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
Dynamic Earth Pressure Page 122

Lecture Notes○
Pp. 275 - 280 Kramer○
DEEPSOIL.pdf○
2001 Darendeli, Ch. 10○
Reading Assignment
DeepSoil User's Manual○
2001 Darendeli○
Other Materials
Homework Assignment #5
Plot the scaled acceleration time historya.Plot the scaled response spectrum b.
Obtain the scale Matahina Dam, New Zealand record from the course website and plot the following: (10 points)
1.
For sands, Darendeli, 2001 curvesa.For silts, use Darendeli, 2001 with PI = 0b.For clays, use Darendeli, 2001 curves with PI = 20c.Treat layer 18 as a clay with PI = 20 and use Darendeli, 2001 curvesd.Treat layer 19 as a sand and use Darendeli, 2001 curvese.For the bedrock velocity, use the velocity corresponding to the deepest Vs measurement in the soil profile with 2 percent damping
f.
Develop a soil profile for ground response analysis using soil properties for the I-15 project at 600 South Street (see attached) and the shear wave velocities found in SLC Vs profile.xls. (20 points)
2.
Response spectrum summary a.Acceleration time histories for layer 1 b.pga profilec.
Perform a site-specific, non-linear time domain ground response analysis for this soil profile using the pressure dependent hyperbolic model and Masing critera. Provide the following plots of the results: (15 points)
3.
Repeat problem 3 but perform a EQL analysis using the directions given in HW#3 problem 3. Plot a comparative plot of the response spectra using the spectrum from the nonlinear pressure dependent model (previous problem) versus the EQL pressure independent model (HW3 problem 4). (10 points).
4.
(SEE NEXT PG.)
© Steven F. Bartlett, 2011
Nonlinear MethodsSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 123

© Steven F. Bartlett, 2011
Homework Assignment #5 (cont.)
Varying thicknessi.Varying unit weightii.Varying shear modulusiii.
Heterogeneous layersa.
Dampingb.Given the information below, use the modified spreadsheet to perform a dynamic analysis of 5 second duration. Plot the response of the surface node versus time for verification:
c.
Layer # layer thickness unit weight Vs Damping
(m) kN/m 3̂ (m/s)
1 1 19 150 10
2 1 19 170 10
3 1 19 200 10
4 0.5 20 210 10
5 1 20 230 10
6 0.5 20 250 10
7 2 20 270 10
8 1 21 300 10
9 1 21 330 10
10 1 21 350 10
v(t) = A cos( t + )
A = 3.000
12.566
0.000
Verify your solution in 5 by performing an linear elastic analysis in DEEPSoil or FLAC for the same soil properties and velocity input (10 points).
6.
Modify the finite difference spreadsheet provided on the course website to include (20 points):
5.
Nonlinear MethodsSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 124

© Steven F. Bartlett, 2011
Nonlinear Methods Page 125

© Steven F. Bartlett, 2011
Homework Assignment #5 (cont.)
Solution (Excel) for uniform Vs = 80 m/s and 10 damping5.
Solution (FLAC)6.
Nonlinear MethodsSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 126

© Steven F. Bartlett, 2011
Homework Assignment #5 (cont.)
Solution (Excel) (first 5 time steps)5.
Nonlinear MethodsSunday, August 14, 20113:32 PM
Nonlinear Methods Page 127

© Steven F. Bartlett, 2011
EQL Method
Nonlinear Methods
Comparison of 1D Equivalent Liner vs. 1D Nonlinear MethodsSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 128

© Steven F. Bartlett, 2011
Target Spectrum for Comparisons
EQL vs NL ComparisonsSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 129

© Steven F. Bartlett, 2011
Nonlinear Results (DEEPSoil at Surface from 5 km Convolution
EQL (Shake) Results at Surface from 5 km Convolution
EQL vs NL Comparisons (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 130

© Steven F. Bartlett, 2011
Fundamental Equation of Motion
Lumped Mass System used in DeepSoilSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 131

© Steven F. Bartlett, 2011
Modified Soil Hyperbolic Model used in DeepSoil
DEEPSoil - Hyperbolic ModelSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 132

© Steven F. Bartlett, 2011
Introducing Pressure Dependency (Important for Deep Sediments)
DEEPSoil (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 133

© Steven F. Bartlett, 2011
Incorporating Pressure Dependency in Damping
DeepSoil (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 134

© Steven F. Bartlett, 2011
Pressure-dependent parameters b and d used to adjust curves in DEEPSoil.
However, DARENDELI, 2001 has published newer curves based on confining pressure and PI. These are also incorporated in DEEPSoil.
DEEPSoil (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 135

© Steven F. Bartlett, 2011
As part of various research projects [including the SRS (Savannah River Site) Project AA891070. EPRI (Electric Power Research Institute) Project 3302. and ROSRINE (Resolution of Site Response Issues from the Northridge Earthquake) Project], numerous geotechnical sites were drilled and sampled. Intact soil samples over a depth range of several hundred meters were recovered from 20 of these sites. These soil samples were tested in the laboratory at The University of Texas at Austin (UTA) to characterize the materials dynamically. The presence of a database accumulated from testing these intact specimens motivated a re-evaluation of empirical curves employed in the state of practice. The weaknesses of empirical curves reported in the literature were identified and the necessity of developing an improved set of empirical curves was recognized. This study focused on developing the empirical framework that can be used to generate normalized modulus reduction and material damping curves. This framework is composed of simple equations. which incorporate the key parameters that control nonlinear soil behavior. The data collected over the past decade at The University of Texas at Austin are statistically analyzed using First-order. Second-moment Bayesian Method (FSBM). The effects of various parameters (such as confining pressure and soil plasticity on dynamic soil properties are evaluated and quantified within this framework. One of the most important aspects of this study is estimating not only the mean values of the empirical curves but also estimating the uncertainty associated with these values. This study provides the opportunity to handle uncertainty in the empirical estimates of dynamic soil properties within the probabilistic seismic hazard analysis framework. A refinement in site-specific probabilistic seismic hazard assessment is expected to materialize in the near future by incorporating the results of this study into the state of practice.
Shear Modulus and Damping Curves from DARENDELI, 2001 Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 136

© Steven F. Bartlett, 2011
DARENDELI, 2001
Effects of Mean Effective Stress on Shear Modulus and Damping CurvesSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 137

© Steven F. Bartlett, 2011
Shearing Strain (%) σo' = 0.25 atm σo' = 1.0 atm σo' = 4.0 atm σo' = 16 atm1.00E-05 0.999 0.999 1.000 1.0002.20E-05 0.998 0.999 0.999 1.0004.84E-05 0.996 0.998 0.998 0.9991.00E-04 0.993 0.995 0.997 0.9982.20E-04 0.986 0.991 0.994 0.9964.84E-04 0.971 0.981 0.988 0.9921.00E-03 0.944 0.964 0.976 0.9852.20E-03 0.891 0.928 0.952 0.9694.84E-03 0.799 0.861 0.906 0.9381.00E-02 0.671 0.761 0.832 0.8852.20E-02 0.497 0.607 0.706 0.7894.84E-02 0.324 0.428 0.538 0.6451.00E-01 0.197 0.277 0.374 0.4822.20E-01 0.107 0.157 0.225 0.3114.84E-01 0.055 0.083 0.123 0.1791.00E+00 0.029 0.044 0.067 0.101
Shearing Strain (%) σo' = 0.25 atm σo' = 1.0 atm σo' = 4.0 atm σo' = 16 atm1.00E-05 1.201 0.804 0.539 0.3612.20E-05 1.207 0.808 0.541 0.3624.84E-05 1.226 0.820 0.548 0.3671.00E-04 1.257 0.839 0.560 0.3742.20E-04 1.330 0.884 0.588 0.3914.84E-04 1.487 0.982 0.649 0.4291.00E-03 1.792 1.174 0.769 0.5032.20E-03 2.458 1.602 1.039 0.6734.84E-03 3.762 2.474 1.607 1.0351.00E-02 5.821 3.953 2.618 1.7022.20E-02 9.097 6.579 4.572 3.0754.84E-02 12.993 10.184 7.621 5.4491.00E-01 16.376 13.788 11.134 8.5732.20E-01 19.181 17.199 14.946 12.4834.84E-01 20.829 19.565 17.990 16.0701.00E+00 21.393 20.716 19.792 18.528
DARENDELI, 2001
Effects of Mean Effective Stress on Shear Modulus and Damping Curves (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 138

© Steven F. Bartlett, 2011
Nonlinear Methods Page 139

© Steven F. Bartlett, 2011
Curve 1
Curve 2
Curve 1 - SandDarendeli, 2001
v' (psf) = 11357OCR = 1Ko = 0.4N = 10F = 1 Hz
Curve 2 - SandDarendeli, 2001
v' (psf) = 576OCR = 1Ko = 0.4N = 10F = 1 Hz
Curve 2
Curve 1
DEEPSoil V4.0
Effects of Mean Effective Stress on Shear Modulus and Damping Curves (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 140

© Steven F. Bartlett, 2011
DARENDELI, 2001
Effects of Plasticity on Shear Modulus and Damping CurvesSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 141

© Steven F. Bartlett, 2011
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 0.999 1.000 1.000 1.000 1.0002.20E-05 0.999 0.999 0.999 1.000 1.0004.84E-05 0.998 0.998 0.999 0.999 0.9991.00E-04 0.995 0.997 0.997 0.998 0.9992.20E-04 0.991 0.993 0.995 0.996 0.9974.84E-04 0.981 0.986 0.989 0.992 0.9941.00E-03 0.964 0.973 0.979 0.984 0.9892.20E-03 0.928 0.947 0.958 0.967 0.9784.84E-03 0.861 0.896 0.917 0.934 0.9561.00E-02 0.761 0.816 0.849 0.878 0.9172.20E-02 0.607 0.682 0.732 0.778 0.8434.84E-02 0.428 0.509 0.569 0.629 0.7221.00E-01 0.277 0.348 0.404 0.465 0.5712.20E-01 0.157 0.205 0.248 0.296 0.3924.84E-01 0.083 0.111 0.137 0.169 0.2381.00E+00 0.044 0.060 0.076 0.095 0.138
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 0.804 0.997 1.191 1.450 2.0962.20E-05 0.808 1.000 1.193 1.451 2.0974.84E-05 0.820 1.008 1.199 1.456 2.1001.00E-04 0.839 1.021 1.209 1.464 2.1052.20E-04 0.884 1.053 1.234 1.482 2.1174.84E-04 0.982 1.122 1.287 1.523 2.1431.00E-03 1.174 1.257 1.392 1.603 2.1932.20E-03 1.602 1.562 1.628 1.786 2.3094.84E-03 2.474 2.198 2.128 2.175 2.5601.00E-02 3.953 3.317 3.028 2.888 3.0292.20E-02 6.579 5.440 4.803 4.343 4.0294.84E-02 10.184 8.650 7.664 6.824 5.8761.00E-01 13.788 12.217 11.092 10.024 8.5412.20E-01 17.199 15.951 14.966 13.941 12.2794.84E-01 19.565 18.829 18.185 17.458 16.1321.00E+00 20.716 20.460 20.178 19.815 19.069
DARENDELI, 2001
Effects of Plasticity on Shear Modulus and Damping Curves (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 142
© Steven F. Bartlett, 2011
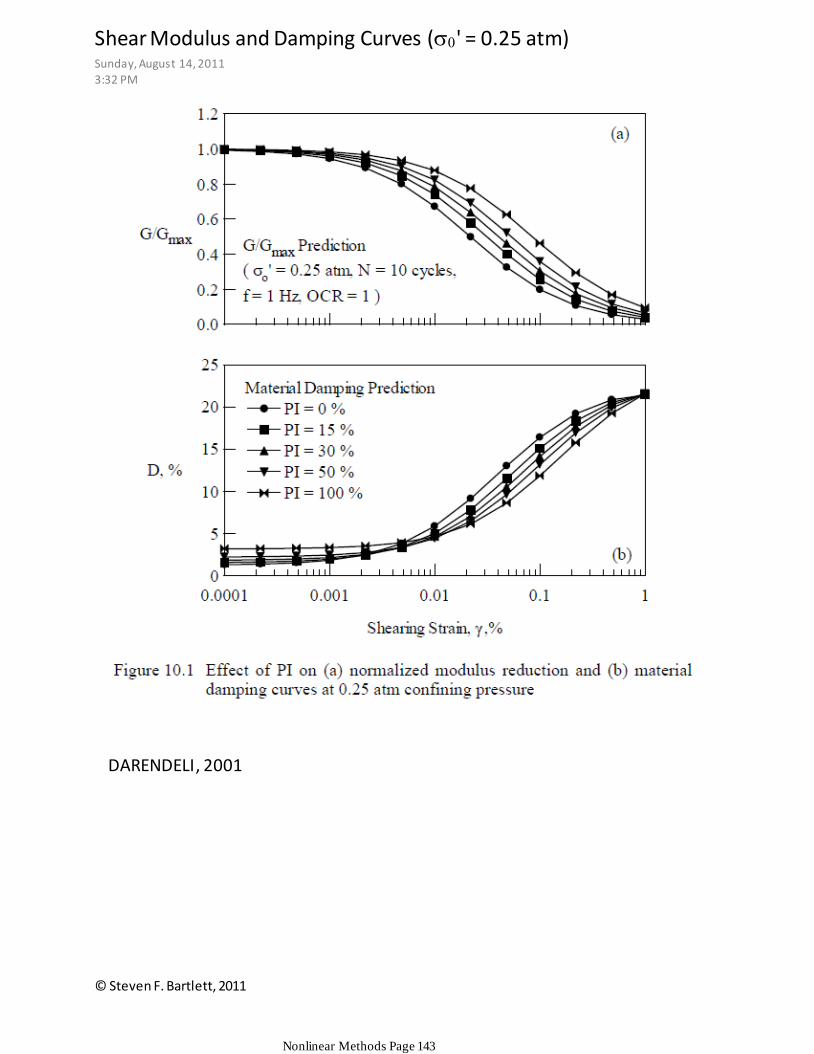
DARENDELI, 2001
Shear Modulus and Damping Curves (' = 0.25 atm)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 143

© Steven F. Bartlett, 2011
DARENDELI, 2001
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 0.999 0.999 1.000 1.000 1.0002.20E-05 0.998 0.999 0.999 0.999 1.0004.84E-05 0.996 0.997 0.998 0.998 0.9991.00E-04 0.993 0.995 0.996 0.997 0.9982.20E-04 0.986 0.990 0.992 0.994 0.9964.84E-04 0.971 0.979 0.983 0.987 0.9911.00E-03 0.944 0.959 0.968 0.975 0.9832.20E-03 0.891 0.919 0.936 0.949 0.9664.84E-03 0.799 0.847 0.876 0.900 0.9321.00E-02 0.671 0.739 0.783 0.822 0.8762.20E-02 0.497 0.579 0.637 0.692 0.7744.84E-02 0.324 0.400 0.459 0.521 0.6251.00E-01 0.197 0.255 0.303 0.358 0.4612.20E-01 0.107 0.142 0.174 0.213 0.2934.84E-01 0.055 0.074 0.093 0.116 0.1671.00E+00 0.029 0.040 0.050 0.063 0.093
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 1.201 1.489 1.778 2.164 3.1292.20E-05 1.207 1.493 1.781 2.166 3.1314.84E-05 1.226 1.506 1.791 2.174 3.1361.00E-04 1.257 1.528 1.808 2.187 3.1442.20E-04 1.330 1.579 1.848 2.217 3.1634.84E-04 1.487 1.690 1.933 2.282 3.2041.00E-03 1.792 1.906 2.101 2.411 3.2862.20E-03 2.458 2.387 2.476 2.702 3.4724.84E-03 3.762 3.358 3.249 3.310 3.8681.00E-02 5.821 4.977 4.581 4.386 4.5932.20E-02 9.097 7.778 7.010 6.441 6.0704.84E-02 12.993 11.489 10.477 9.589 8.5791.00E-01 16.376 15.064 14.088 13.137 11.7982.20E-01 19.181 18.334 17.640 16.904 15.7164.84E-01 20.829 20.515 20.208 19.849 19.2131.00E+00 21.393 21.507 21.542 21.547 21.544
Shear Modulus and Damping Curves (' = 0.25 atm)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 144

© Steven F. Bartlett, 2011
DARENDELI, 2001
Shear Modulus and Damping Curves (' = 1 atm)Sunday, August 14, 20113:32 PM
Nonlinear Methods Page 145

© Steven F. Bartlett, 2011
DARENDELI, 2001
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 0.999 1.000 1.000 1.000 1.0002.20E-05 0.999 0.999 0.999 1.000 1.0004.84E-05 0.998 0.998 0.999 0.999 0.9991.00E-04 0.995 0.997 0.997 0.998 0.9992.20E-04 0.991 0.993 0.995 0.996 0.9974.84E-04 0.981 0.986 0.989 0.992 0.9941.00E-03 0.964 0.973 0.979 0.984 0.9892.20E-03 0.928 0.947 0.958 0.967 0.9784.84E-03 0.861 0.896 0.917 0.934 0.9561.00E-02 0.761 0.816 0.849 0.878 0.9172.20E-02 0.607 0.682 0.732 0.778 0.8434.84E-02 0.428 0.509 0.569 0.629 0.7221.00E-01 0.277 0.348 0.404 0.465 0.5712.20E-01 0.157 0.205 0.248 0.296 0.3924.84E-01 0.083 0.111 0.137 0.169 0.2381.00E+00 0.044 0.060 0.076 0.095 0.138
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 0.804 0.997 1.191 1.450 2.0962.20E-05 0.808 1.000 1.193 1.451 2.0974.84E-05 0.820 1.008 1.199 1.456 2.1001.00E-04 0.839 1.021 1.209 1.464 2.1052.20E-04 0.884 1.053 1.234 1.482 2.1174.84E-04 0.982 1.122 1.287 1.523 2.1431.00E-03 1.174 1.257 1.392 1.603 2.1932.20E-03 1.602 1.562 1.628 1.786 2.3094.84E-03 2.474 2.198 2.128 2.175 2.5601.00E-02 3.953 3.317 3.028 2.888 3.0292.20E-02 6.579 5.440 4.803 4.343 4.0294.84E-02 10.184 8.650 7.664 6.824 5.8761.00E-01 13.788 12.217 11.092 10.024 8.5412.20E-01 17.199 15.951 14.966 13.941 12.2794.84E-01 19.565 18.829 18.185 17.458 16.1321.00E+00 20.716 20.460 20.178 19.815 19.069
Shear Modulus and Damping Curves (' = 1 atm)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 146

© Steven F. Bartlett, 2011
DARENDELI, 2001
Shear Modulus and Damping Curves (' = 4 atm)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 147

© Steven F. Bartlett, 2011
DARENDELI, 2001
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 1.000 1.000 1.000 1.000 1.0002.20E-05 0.999 1.000 1.000 1.000 1.0004.84E-05 0.998 0.999 0.999 0.999 1.0001.00E-04 0.997 0.998 0.998 0.999 0.9992.20E-04 0.994 0.996 0.997 0.997 0.9984.84E-04 0.988 0.991 0.993 0.995 0.9961.00E-03 0.976 0.983 0.986 0.989 0.9932.20E-03 0.952 0.965 0.972 0.978 0.9864.84E-03 0.906 0.931 0.945 0.956 0.9711.00E-02 0.832 0.873 0.898 0.918 0.9452.20E-02 0.706 0.770 0.810 0.845 0.8934.84E-02 0.538 0.618 0.673 0.725 0.8021.00E-01 0.374 0.454 0.514 0.575 0.6752.20E-01 0.225 0.287 0.339 0.396 0.5014.84E-01 0.123 0.163 0.199 0.241 0.3271.00E+00 0.067 0.091 0.113 0.140 0.200
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 0.539 0.668 0.798 0.971 1.4042.20E-05 0.541 0.670 0.799 0.972 1.4054.84E-05 0.548 0.675 0.803 0.975 1.4071.00E-04 0.560 0.683 0.809 0.980 1.4102.20E-04 0.588 0.703 0.824 0.991 1.4174.84E-04 0.649 0.745 0.857 1.016 1.4331.00E-03 0.769 0.829 0.922 1.066 1.4642.20E-03 1.039 1.021 1.070 1.180 1.5374.84E-03 1.607 1.428 1.388 1.426 1.6931.00E-02 2.618 2.173 1.977 1.886 1.9912.20E-02 4.572 3.684 3.206 2.871 2.6484.84E-02 7.621 6.235 5.387 4.693 3.9341.00E-01 11.134 9.482 8.357 7.333 5.9722.20E-01 14.946 13.400 12.231 11.056 9.2264.84E-01 17.990 16.866 15.935 14.917 13.1181.00E+00 19.792 19.158 18.571 17.876 16.513
Shear Modulus and Damping Curves (' = 4 atm)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 148

© Steven F. Bartlett, 2011
DARENDELI, 2001
Shear Modulus and Damping Curves (' = 16 atm)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 149

© Steven F. Bartlett, 2011
DARENDELI, 2001
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 1.000 1.000 1.000 1.000 1.0002.20E-05 1.000 1.000 1.000 1.000 1.0004.84E-05 0.999 0.999 0.999 1.000 1.0001.00E-04 0.998 0.999 0.999 0.999 0.9992.20E-04 0.996 0.997 0.998 0.998 0.9994.84E-04 0.992 0.994 0.996 0.997 0.9981.00E-03 0.985 0.989 0.991 0.993 0.9962.20E-03 0.969 0.977 0.982 0.986 0.9914.84E-03 0.938 0.954 0.964 0.972 0.9811.00E-02 0.885 0.915 0.932 0.946 0.9642.20E-02 0.789 0.839 0.869 0.895 0.9294.84E-02 0.645 0.716 0.763 0.804 0.8631.00E-01 0.482 0.564 0.623 0.679 0.7642.20E-01 0.311 0.386 0.444 0.506 0.6104.84E-01 0.179 0.233 0.279 0.331 0.4311.00E+00 0.101 0.135 0.166 0.203 0.280
Shearing Strain (%) PI = 0 % PI = 15 % PI = 30 % PI = 50 % PI = 100 %1.00E-05 0.361 0.448 0.534 0.650 0.9412.20E-05 0.362 0.449 0.535 0.651 0.9414.84E-05 0.367 0.452 0.538 0.653 0.9421.00E-04 0.374 0.457 0.541 0.656 0.9442.20E-04 0.391 0.469 0.551 0.663 0.9494.84E-04 0.429 0.495 0.571 0.678 0.9581.00E-03 0.503 0.547 0.611 0.709 0.9782.20E-03 0.673 0.667 0.704 0.780 1.0234.84E-03 1.035 0.924 0.903 0.934 1.1201.00E-02 1.702 1.407 1.281 1.227 1.3082.20E-02 3.075 2.433 2.100 1.871 1.7294.84E-02 5.449 4.318 3.659 3.138 2.5891.00E-01 8.573 7.021 6.022 5.151 4.0492.20E-01 12.483 10.780 9.557 8.381 6.6514.84E-01 16.070 14.619 13.472 12.268 10.2411.00E+00 18.528 17.522 16.655 15.677 13.847
Shear Modulus and Damping Curves (' = 16 atm)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 150

© Steven F. Bartlett, 2011
Finite Difference MethodSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 151

© Steven F. Bartlett, 2011
Finite Difference Method (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 152
© Steven F. Bartlett, 2011
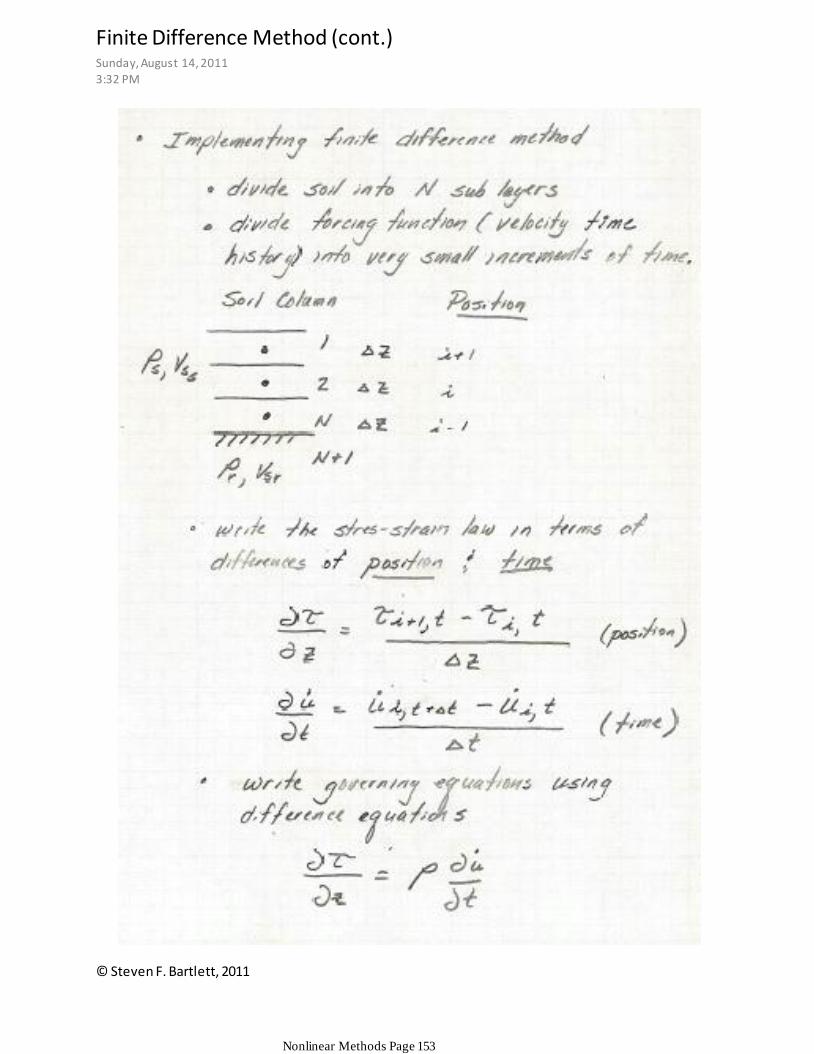
Finite Difference Method (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 153

© Steven F. Bartlett, 2011
Finite Difference Method (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 154

© Steven F. Bartlett, 2011
Finite Difference Method (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 155

© Steven F. Bartlett, 2011
Finite Difference Method (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 156

© Steven F. Bartlett, 2011
Finite Difference Method (cont.)Sunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 157

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
Nonlinear Methods Page 158

© Steven F. Bartlett, 2011
Course Information○
Lecture Notes○
Pp. 73 - 75 Kramer○
Reading Assignment
FLAC User Manual Theory and Background, Section 1 - Background -The Explicit Finite Difference Method
○
Other Materials
Homework Assignment #6
Complete CVEEN 7330 Modeling Exercise 1 (in class)1.Complete CVEEN 7330 Modeling Exercise 2 (30 points - plot, 10 points other calculations and discussion)
2.
2D Finite Difference MethodSunday, August 14, 2011
3:32 PM
2D Finite Difference Page 159

2D Finite Difference Page 160

Steven F. Bartlett, 2010
Steps
Generate a grid for the domain where we want an approximate solution.
1.
Assign material properties2.Assign boundary/loading conditions3.Use the finite difference equations as a substitute for the ODE/PDE system of equations. The ODE/PDE, thus substituted, becomes a linear or non-linear system of algebraic equations.
4.
Solve for the system of algebraic equations using the initial conditions and the boundary conditions. This usually done by time stepping in an explicit formulation.
5.
Implement the solution in computer code to perform the calculations.
6.
Finite Difference MethodThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 161

Steven F. Bartlett, 2010
Grid GenerationThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 162

Steven F. Bartlett, 2010
The finite difference grid also identifies the storage location of all state variables in the model. The procedure followed by FLAC is that all vector quantities (e.g.. forces. velocities. displacements. flow rates) are stored at gridpoint locations. while all scalar and tensor quantities (e.g.. stresses. pressure. material properties) are stored at zone centroid locations. There are three exceptions: saturation and temperature are considered gridpoint variables: and pore pressure is stored at both gridpoint and zone centroid locations.
Grid Generation (continued)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 163

Steven F. Bartlett, 2010
Tunnel
Slope or Embankment
Rock Slope with groundwater
Irregular GridsThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 164

Steven F. Bartlett, 2010
Braced Excavation
Concrete Diaphragm Wall
Irregular grids (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 165

Steven F. Bartlett, 2010
Elastic and Mohr Coulomb ModelsDensity•Bulk Modulus•Shear Modulus•Cohesion (MC only)•Tension (MC only)•Drained Friction Angle (MC only)•Dilation Angle (MC only)•
Hyperbolic Model
Required Input for Hyperbolic Model
Function Form of Hyperbolic Model
Material PropertiesThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 166

Steven F. Bartlett, 2010
FLAC accepts any consistent set of engineering units. Examples of consistent sets of units for basic parameters are shown in Tables 2.5. 2.6 and 2.7. The user should apply great care when converting from one system of units to another. No conversions are performed in FLAC except for friction and dilation angles. which are entered in degrees.
Units for FLACThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 167

Steven F. Bartlett, 2010
Positive = tension○
Negative = compression○
Normal or direct stress
Shear stress
With reference to the above figure, a positive shear stress points in the positive direction of the coordinate axis of the second subscript if it acts on a surface with an outward normal in the positive direction. Conversely, if the outward normal of the surface is in the negative direction, then the positive shear stress points in the negative direction of the coordinate axis of the second subscript. The shear stresses shown in the above figure are all positive (from FLAC manual).
In other words, xy is positive in the counter-clockwise direction;
likewise yx is positive in the clockwise direction.
Sign Conventions for FLACThursday, March 11, 201011:43 AM
2D Finite Difference Page 168

DIRECT OR NORMAL STRAIN
Positive strain indicates extension: negative strain indicates compression.
○
SHEAR STRAIN
Shear strain follows the convention of shear stress (see figure above). The distortion associated with positive and negative shear strain is illustrated in Figure 2.44.
○
PRESSURE
A positive pressure will act normal to. and in a direction toward. the surface of a body (i.e.. push), A negative pressure will act normal to. and in a direction away from. the surface of a body (i.e.. pull). Figure 2.45 illustrates this convention.
○
Steven F. Bartlett, 2010
Sign Conventions (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 169

Steven F. Bartlett, 2010
PORE PRESSURE
Fluid pore pressure is positive in compression. Negative pore pressure indicates fluid tension.
○
GRAVITY
Positive gravity will pull the mass of a body downward (in the negative y-direction). Negative gravity will pull the mass of a body upward.
○
GFLOW
This is a FISH parameter (see Section 2 in the FISH volume which denotes the net fluid flow associated with a gridpoint. A positive gflow corresponds to flow into a gridpoint. Conversely, a negative gflow corresponds to flow out of a gridpoint.
○
Sign Conventions (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 170

Steven F. Bartlett, 2010
Boundary Conditions
Fixed (X or Y) or both (B)○
Free○
Applied Conditions at Boundary
Velocity or displacement○
Stress or force○
X means fixed in x direction
B means fixed in both directions
Yellow line with circle means force, velocity or stress has been applied to this surface.
Boundary ConditionsThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 171

Steven F. Bartlett, 2010
Finite-difference methods approximate the solutions to differential equations by replacing derivative expressions with approximately equivalent difference quotients. That is, because the first derivative of a function f is, by definition,
then a reasonable approximation for that derivative would be to take
for some small value of h. In fact, this is the forward differenceequation for the first derivative. Using this and similar formulae to replace derivative expressions in differential equations, one can approximate their solutions without the need for calculus
Pasted from <http://en.wikipedia.org/wiki/Finite_difference_method>
Only three forms are commonly considered: forward, backward, and central differences.A forward difference is an expression of the form
Depending on the application, the spacing h may be variable or held constant.A backward difference uses the function values at x and x − h, instead of the values at x + h and x:
Finally, the central difference is given by
Pasted from <http://en.wikipedia.org/wiki/Forward_difference>
Fundamentals of FDMThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 172

Steven F. Bartlett, 2010
Higher-order differences
2nd Order Derivative
In an analogous way one can obtain finite difference approximations to higher order derivatives and differential operators. For example, by using the above central difference formula for f'(x + h / 2) and f'(x − h/ 2) and applying a central difference formula for the derivative of f' at x, we obtain the central difference approximation of the second derivative of f:
Pasted from <http://en.wikipedia.org/wiki/Finite_difference>
Examples
Pasted from <http://en.wikipedia.org/wiki/Groundwater_flow_equation>
Groundwater flow equation
Pasted from <https://ccrma.stanford.edu/~jos/pasp/D_Mesh_Wave.html>
2D wave equation
Fundamentals of FDM (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 173

Steven F. Bartlett, 2010
Explicit and implicit methods are approaches used in numerical analysisfor obtaining numerical solutions of time-dependent ordinary and partial differential equations, as is required in computer simulations of physical processes.
Explicit methods calculate the state of a system at a later time from the state of the system at the current time, while implicit methods find a solution by solving an equation involving both the current state of the system and the later one. Mathematically, if Y(t) is the current system state and Y(t + Δt) is the state at the later time (Δt is a small time step), then, for an explicit method
while for an implicit method one solves an equation
to find Y(t + Δt).
It is clear that implicit methods require an extra computation (solving the above equation), and they can be much harder to implement. Implicit methods are used because many problems arising in real life are stiff, for which the use of an explicit method requires impractically small time steps Δt to keep the error in the result bounded (see numerical stability). For such problems, to achieve given accuracy, it takes much less computational time to use an implicit method with larger time steps, even taking into account that one needs to solve an equation of the form (1) at each time step. That said, whether one should use an explicit or implicit method depends upon the problem to be solved.
Pasted from <http://en.wikipedia.org/wiki/Explicit_method>
Fundamentals of FDM - Explicit vs Implicit MethodsThursday, March 11, 201011:43 AM
2D Finite Difference Page 174

Steven F. Bartlett, 2010
The previous page contains explains the explicit method which is implemented in FLAC. The central concept of an explicit method is that the calculational “wave speed” always keeps ahead of the physical wave speed, so that the equations always operate on known values that are fixed for the duration of the calculation. There are several distinct advantages to this (and at least one big disadvantage!): most importantly, no iteration process is necessary. Computing stresses from strains in an element, even if the constitutive law is wildly nonlinear.
In an implicit method (which is commonly used in finite element programs), every element communicates with every other element during one solution step: several cycles of iteration are necessary before compatibility and equilibrium are obtained.
Table 1.1 (next page) compares the explicit amid implicit methods. The disadvantage of the explicit method is seen to be the small timestep, which means that large numbers of steps must be taken. Overall, explicit methods are best for ill-behaved systems e.g., nonlinear, large—strain, physical instability; they are not efficient for modeling linear, small—strain problems.
Explicit versus Implicit FormulationThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 175

Steven F. Bartlett, 2010
Table 1.1 Comparison of Explicit versus Implicit Formulations
Explicit
Timestep must be smaller than a critical value for stability
•
Small amount of computational effort per timestep.
•
No significant numerical damping introduced for dynamic solution
•
No iterations necessary to follow nonlinear
•
constitutive law.Provided that the timestep criterion is always satisfied, nonlinear laws are always followed in a valid physical way.
•
Matrices are never formed. •Memory requirements are always at a minimum. No bandwidth limitations.
•
Since matrices are never formed large displacements and strains are accommodated without additional computing effort.
Implicit
Timestep can be arbitrarily large with unconditionally stable schemes
•
Large amount of computational effort per timestep.
•
Numerical damping dependent on timestep present with unconditionally stable schemes.
•
Iterative procedure necessary to follow nonlinear constitutive law.
•
Always necessary to demonstrate that the above-mentioned procedure is: (a) stable: and (b) follows the physically correct path (for path-sensitive problems).
•
Stiffness matrices must be stored. Ways must be found to overcome associated problems such as bandwidth.
•
Memory requirements tend to be large.
•
Additional computing effort needed to follow large displacements and strains.
•
Explicit versus Implicit Formulation (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 176

Explicit, Time-Marching Scheme
Even though we want FLAC to find a static solution to a problem, the dynamic equations of motion are included in the formulation. One reason for doing this is to ensure that the numerical scheme is stable when the physical system being modeled is unstable. With nonlinear materials, there is always the possibility of physical instability—e.g., the sudden collapse of a pillar. In real life, some of the strain energy in the system is converted into kinetic energy, which then radiates away from the source and dissipates. FLAC models this process directly, because inertial terms are included — kinetic energy is generated and dissipated. In contrast, schemes that do not include inertial terms must use some numerical procedure to treat physical instabilities.
Even if the procedure is successful at preventing numerical instability, the path taken may not be a realistic one. One penalty for including the full law of motion is that the user must have some physical feel for what is going on; FLAC is not a black box that will give “the solution.” The behavior of the numerical system must be interpreted.
Steven F. Bartlett, 2010
Explicit Method Used in FLACThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 177

Steven F. Bartlett, 2010
Lagrangian analysis is the use of Lagrangian coordinates to analyze various problems in continuum mechanics.
Lagrangian analysis may be used to analyze currents and flows of various materials by analyzing data collected from gauges/sensors embedded in the material which freely move with the motion of the material.[1] A common application is study of ocean currents in oceanography, where the movable gauges in question called Lagrangian drifters.
Pasted from <http://en.wikipedia.org/wiki/Lagrangian_analysis>
Pasted from <http://www.ansys.com/products/images/new-features-1.jpg>
Since FLAC does not need to form a global stiffness matrix, it is a trivial matter to update coordinates at each timestep in large-strain mode. The incremental displacements are added to the coordinates so that the grid moves and deforms with the material it represents.This is termed a “Lagrangian” formulation. in contrast to an “Eulerian” formulation. in which the material moves and deforms relative to a fixed grid. The constitutive formulation at each step is a small—strain one, but is equivalent to a large-strain formulation over many steps.
Example of Lagrangian analysis of golf club head striking ball. Note that the tracking and movement of the sand with the striking of the ball requires a Lagrangian analysis. (from ANSYS)
Lagrangian AnalysisThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 178

Steven F. Bartlett, 2010
Eq. (1.1)
Note that the above partial differential equation is a 2nd order partial differential equation because u dot is a derivative of u (displacement). This equation expresses dynamic force equilibrium which relates the inertial and gravitational forces to changes in stress. It is essentially the wave equation, which is further discussed in soil dynamics.
Equation of MotionThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 179

Steven F. Bartlett, 2010
The constitutive relation that is required in the PDE given before relates changes in stress with strain.
However, since FLAC's formulation is essentially a dynamic formulation, where changes in velocities are easily calculated, then strain rate is used and is related to velocity as shown below.
The mechanical constitutive law has the form:
Constitutive RelationsThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 180

Steven F. Bartlett, 2010
Stress Strain Constitutive Law (Hooke's Law)
Equation of Motion for Dynamic Equilibrium (wave equation)
Eq. (1.2)FDM formulation using central finite difference equation.
The central finite difference equation corresponding is for a typical zone i is given by the above equation. Here the quantities in parentheses — e.g.. (i) — denote the time, t, at which quantities are evaluated: the superscripts. i, denote the zone number, not that something is raised to a power.
Numbering scheme for a 1-D body using FDM.
FDM - Elastic Example from FLAC manualThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 181

Steven F. Bartlett, 2010
Finite difference equation for equation of motion using central finite difference equation. Note that on the left side of the equation a change in velocity (i.e., acceleration) is represented; on the right side of the equation a change in stress with respect to position is represented for the time step. In other words, an acceleration (unbalanced force) causes a change is the stress, or stress wave.
Rearrange the above equation, produces Eq. 1.3
Integrating this equation, produces displacements as shown in Eq. 1.4
This equation says that the position and time t + delta t is equal to the position and time t + (velocity at time t + 1/2 delta t) * delta t.
FDM - Elastic Example (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 182

Steven F. Bartlett, 2010
In the explicit method. the quantities on the right-hand sides of all difference equations are “known”; therefore. we must evaluate Eq. 1.2) for all zones before moving on to Eqs. (1.3) and (1.4). which are evaluated for all grid points. Conceptually. this process is equivalent to a simultaneous update of variables.
motion
bc velocity pulse applied to boundary condition dis_calc displacements from velocity constit stresses are derived from strain motion velocity calculated stress
dis_calc
constit
bc
FDM - Elastic Example (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 183

Steven F. Bartlett, 2010
The following is an example of implementing the FDM for to calculate the behavior of an elastic bar. To do this, we must write FISH code. The primary subroutine, scan_all, and the other routines described in the following pages can be obtained from bar.dat in the Itasca folder.
def scan_all while_stepping time = time + dt bc ; pulse applied to boundary condition dis_calc ; displacements calculated from velocity constit ; stresses are derived from strain motion ; velocity calculated stressend
def bc ; boundary conditions - cosine pulse applied to left end if time >= twave then xvel(1,1) = 0.0 else xvel(1,1) = vmax * 0.5 * (1.0 - cos(w * time)) end_ifEnd
The subroutine, dis_calc, calculates the displacements from the velocities.
The subroutine, bc, applies a one-sided cosine velocity pulse to the left end of the rod.
def dis_calc loop i (1,nel) xdisp(i,1) = xdisp(i,1) + xvel(i,1) * dtend_loop end
FDM - Elastic Example (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 184

Steven F. Bartlett, 2010
The subroutine, called constit, calculates the stress as derived from strain using Hooke's law. The value of e is Young's modulus.
def motion loop i (2,nel) xvel(i,1) = xvel(i,1) + (sxx(i,1) - sxx(i-1,1)) * tdx end_loop end
def constit loop i (1,nel) sxx(i,1) = e * (xdisp(i+1,1) - xdisp(i,1)) / dx end_loop end
This subroutine, called motion, calculates the new velocity from stress. Recall that an unbalanced stress causes an unbalanced force, which in turn produces an acceleration which is a change in velocity.
FDM - Elastic Example (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 185

As described previously, the explicit-solution procedure is not unconditionally stable, the speed of the “calculation front” must be faster than the maximum speed at which information propagates.
A timestep must be chosen that is smaller than some critical timestep. The stability condition for an elastic solid discretized into elements of size x is
where C is the maximum speed at which information can propagate — typically, the p-wave speed. C where
dt = frac * dx / c
Steven F. Bartlett, 2010
FDM - Elastic Example (cont.)Thursday, March 11, 2010
11:43 AM
2D Finite Difference Page 186

Steven F. Bartlett, 2010
nel = 50 ; no. of elements e = 1.0 ; Young's modulus ro = 1.0 ; density dx = 1.0 ; element size p = 15.0 ; number of wavelengths per elements vmax = 1.0 ; amplitude of velocity pulse frac = 0.2 ; fraction of critical timestep
FDM - Elastic Example (cont.) - SolutionThursday, March 11, 2010
11:43 AM
2D Finite Difference Page 187

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
2D Finite Difference Page 188

© Steven F. Bartlett, 2011
QUAD4 and QUAD4M
Quake/W
Equivalent Linear Method ( EQL)○
Quake/W
Plaxis?
Nonlinear Finite Element Method○
FLAC
Nonlinear Finite Difference Method○
Lecture Notes○
Reading Assignment
FLAC Manual○
Other Materials
Homework Assignment #7Complete CVEEN 7330 Modeling Exercise 3 (30 points)1.
Assume the embankment has 2H:1V slope and the crest is a point a.Use FLAC's hysteretic model for sand embankmentb.Use the Taft record on the course website and spectrally match it to the 5 percent damped spectrum used in HW#2 problem 1.
c.
Provide all inputs and outputsd.Compare the crest acceleration with that calculated in HW#2 problem 1 (max acc. = 1.06 g)
e.
Analyze HW#2 problem 1 using FLAC (50 points)2.
Introduction
2D Embankment and Slope Analysis (Numerical)Sunday, August 14, 2011
3:32 PM
2D Embankment and Slope Analysis (Numerical) Page 189

© Steven F. Bartlett, 2011
A variety of finite element and finite difference computer programs are available for use in two- dimensional seismic site response analyses. The computer program QUAD4, originally developed by Idriss and his co-workers (Idriss et al., 1973) and recently updated as QUAD4M by Hudson et al. (1994), is among the most commonly used computer programs for two-dimensional site response analysis. QUAD4M uses an equivalent-liner soil model similar to the model used in SHAKE. Basic input to QUAD4M includes the two-dimensional soil profile, equivalent-linear soil properties, and the time history of horizontal ground motion. Time history of vertical ground motion may also be applied at the base of the soil profile. The base can be modeled as a rigid boundary, with design motions input directly at the base, or as a transmitting boundary which enables application of ground motions as hypothetical rock outcrop motions. With respect to the input soil properties, QUAD4M is very similar to SHAKE91. However, the ability to analyze two-dimensional geometry and the option for simultaneous base excitation with horizontal and vertical acceleration components make QUAD4M a more versatile analytical tool than SHAKE91.
A major difference between the QUAD4M and SHAKE91 equivalent-linear models is that the damping ratio in QUAD4M depends on the frequency of excitation or rate of loading. In QUAD4M, the equivalent-linear viscous damping ratio is used to fix the frequency dependent damping curve at the natural frequency of the soil deposit in order to optimize the gap between model damping and the damping ratio. A major drawback of QUAD4M is its limited pre- and post-processing capabilities. These limited capabilities make finite element mesh generation and processing and interpretation of the results difficult and time consuming. QUAD4M is available from the National Information Service for Earthquake Engineering (NISEE) at University Of California at Berkeley for a nominal cost.
Development of 2D MethodsSunday, August 14, 2011
3:32 PM
2D Embankment and Slope Analysis (Numerical) Page 190

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
2D Embankment and Slope Analysis (Numerical) Page 191

Steven F. Bartlett, 2010
Numerical Modeling (FDM and FEM)
Any failure mode develops naturally; there is no need to specify a range of trial surfaces in advance.
•
No artificial parameters (e.g., functions for inter-slice angles) need to be given as input.
•
Multiple failure surfaces (or complex internal yielding) evolve naturally, if the conditions give rise to them.
•
Structural interaction (e.g., rock bolt, soil nail or geogrid) is modeled realistically as fully coupled deforming elements, not simply as equivalent forces.
•
Solution consists of mechanisms that are feasible kinematically.•
Numerical model such as FLAC offers these advantages over Limit Equilibrium methods:
Pasted from <http://www.itascacg.com/flacslope/overview.html>
There are a number of methods that could have been employed to determine the factor of safety using FLAC. The FLAC shear strength reduction (SSR) method of computing a factor of safety performs a series of computations to bracket the range of possible factors of safety. During SSR, the program lowers the strength (friction angle) of the soil and computes the maximum unbalanced force to determine if the slope is moving. If the force unbalance exceeds a certain value, the strength is increased and the original stresses returned to the initial value and the deformation analyses recomputed. This process continues until the force unbalance is representative of the initial movement of the slope and the angle for this condition is compared to the angle available for the soil to compute the factor of safety.
Numerical MethodsThursday, March 11, 201011:43 AM
2D Embankment and Slope Analysis (Numerical) Page 192

© Steven F. Bartlett, 2011
Total Vertical Stress from incremental building of model (homogenous case)
Total Vertical Stress from non-incremental building of model (homogenous case)
Incremental Building of ModelSunday, August 14, 20113:32 PM
2D Embankment and Slope Analysis (Numerical) Page 193

© Steven F. Bartlett, 2011
Total Vertical Stress from incremental building of model (heterogeneous case)
Total Vertical Stress from non-incremental building of model (heterogeneous case) (not exactly the same as above)
Incremental Building of ModelSunday, August 14, 2011
3:32 PM
2D Embankment and Slope Analysis (Numerical) Page 194

2D Embankment and Slope Analysis (Numerical) Page 195

© Steven F. Bartlett, 2011
config dynamicset dynamic offgrid 21 10;model elastic;prop density=1 bulk=1.33E7 shear=8E7; note very low density assigned to this layer;model null i 1 j 2 10 group 'null' i 1 j 2 10 group delete 'null'model null i 2 j 3 10 group 'null' i 2 j 3 10 group delete 'null'model null i 3 j 4 10 group 'null' i 3 j 4 10 group delete 'null'model null i 4 j 5 10 group 'null' i 4 j 5 10 group delete 'null'model null i 5 j 6 10 group 'null' i 5 j 6 10 group delete 'null'model null i 6 j 7 10 group 'null' i 6 j 7 10 group delete 'null'model null i 7 j 8 10 group 'null' i 7 j 8 10 group delete 'null'model null i 8 j 9 10 group 'null' i 8 j 9 10 group delete 'null'model null i 9 j 10 group 'null' i 9 j 10 group delete 'null'model null i 12 j 10 group 'null' i 12 j 10 group delete 'null'model null i 13 j 9 10 group 'null' i 13 j 9 10 group delete 'null'model null i 14 j 8 10 group 'null' i 14 j 8 10 group delete 'null'model null i 15 j 7 10 group 'null' i 15 j 7 10 group delete 'null'model null i 16 j 6 10 group 'null' i 16 j 6 10 group delete 'null'model null i 17 j 5 10 group 'null' i 17 j 5 10 group delete 'null'model null i 18 j 4 10 group 'null' i 18 j 4 10 group delete 'null'
model null i 19 j 3 10 group 'null' i 19 j 3 10 group delete 'null'model null i 20 j 2 10 group 'null' i 20 j 2 10 group delete 'null'model null i 21 j 2 10 group 'null' i 21 j 2 10 group delete 'null'model null i 21 j 1 group 'null' i 21 j 1 group delete 'null'ini x 0.56119156 y 0.5621834 i 1 j 2ini x 1.5523796 y 1.5533707 i 2 j 3ini x 2.4985127 y 2.4995043 i 3 j 4ini x 3.512227 y 3.5132189 i 4 j 5ini x 4.5484686 y 4.5494604 i 5 j 6ini x 5.494602 y 5.4955935 i 6 j 7ini x 6.508317 y 6.5543623 i 7 j 8ini x 7.499504 y 7.5455494 i 8 j 9ini x 8.5808 y 8.581791 i 9 j 10ini x 9.54946 y 9.527925 i 10 j 11ini x 10.518121 y 9.527925 i 12 j 11ini x 11.576889 y 8.469156 i 13 j 10ini x 12.523023 y 7.4779687 i 14 j 9ini x 13.536737 y 6.4642544 i 15 j 8ini x 14.48287 y 5.5406475 i 16 j 7ini x 15.6092205 y 4.3917713 i 17 j 6ini x 16.487774 y 3.5132189 i 18 j 5ini x 17.47896 y 2.5445583 i 19 j 4ini x 18.515202 y 1.5083168 i 20 j 3ini x 19.461334 y 0.5621834 i 21 j 2;fix x y j 1set gravity=9.81his 999 unbalanced;; heterogeneous case - layers 6 -10 are 10 x stifferprop density=1900 bulk=1.33E7 shear=8E7 j 1solveprop density=1900 bulk=1.33E7 shear=8E7 j 2solveprop density=1900 bulk=1.33E7 shear=8E7 j 3solveprop density=1900 bulk=1.33E7 shear=8E7 j 4solveprop density=1900 bulk=1.33E7 shear=8E7 j 5solveprop density=1900 bulk=1.33E8 shear=8E8 j 6solveprop density=1900 bulk=1.33E8 shear=8E8 j 7solveprop density=1900 bulk=1.33E8 shear=8E8 j 8solveprop density=1900 bulk=1.33E8 shear=8E8 j 9solveprop density=1900 bulk=1.33E8 shear=8E8 j 10solve
FLAC code for incremental building of modelSunday, August 14, 2011
3:32 PM
2D Embankment and Slope Analysis (Numerical) Page 196

Steven F. Bartlett, 2010
Slope Stability Example - No Groundwater Thursday, March 11, 2010
11:43 AM
2D Embankment and Slope Analysis (Numerical) Page 197

Steven F. Bartlett, 2010
Generating the slope
Slope Stability - No Groundwater (cont.)Thursday, March 11, 2010
11:43 AM
2D Embankment and Slope Analysis (Numerical) Page 198

Steven F. Bartlett, 2010
config atsgrid 20,10;Mohr-Coulomb modelm m; soil properties --- note large cohesion to force initial elastic; behavior for determining initial stress state. This will prevent; slope failure when initializing the gravity stressesprop s=.3e8 b=1e8 d=1500 fri=20 coh=1e10 ten=1e10; warp grid to form a slope :gen 0,0 0,3 20,3 20,0 j 1,4gen same 9,10 20,10 same i 6 21 j 4 11mark i=1,6 j=4mark i=6 j=4,11model null region 1,10; displacement boundary conditionsfix x i=1fix x i=21fix x y j=1; apply gravityset grav=9.81; displacement history of slopehis ydis i=10 j=10; solve for initial gravity stressessolve;; reset displacement components to zeroini xdis=0 ydis=0; set cohesion to 0; this is done to explore the failure mechanism in the cohesionless slopeprop coh=0; use large strain logicset largestep 1200; comment this line out to calculate factor of safety of undeformed slopesolve fossave dry_slope.sav 'last project state'
Slope Stability - No Groundwater (cont.)Thursday, March 11, 2010
11:43 AM
2D Embankment and Slope Analysis (Numerical) Page 199
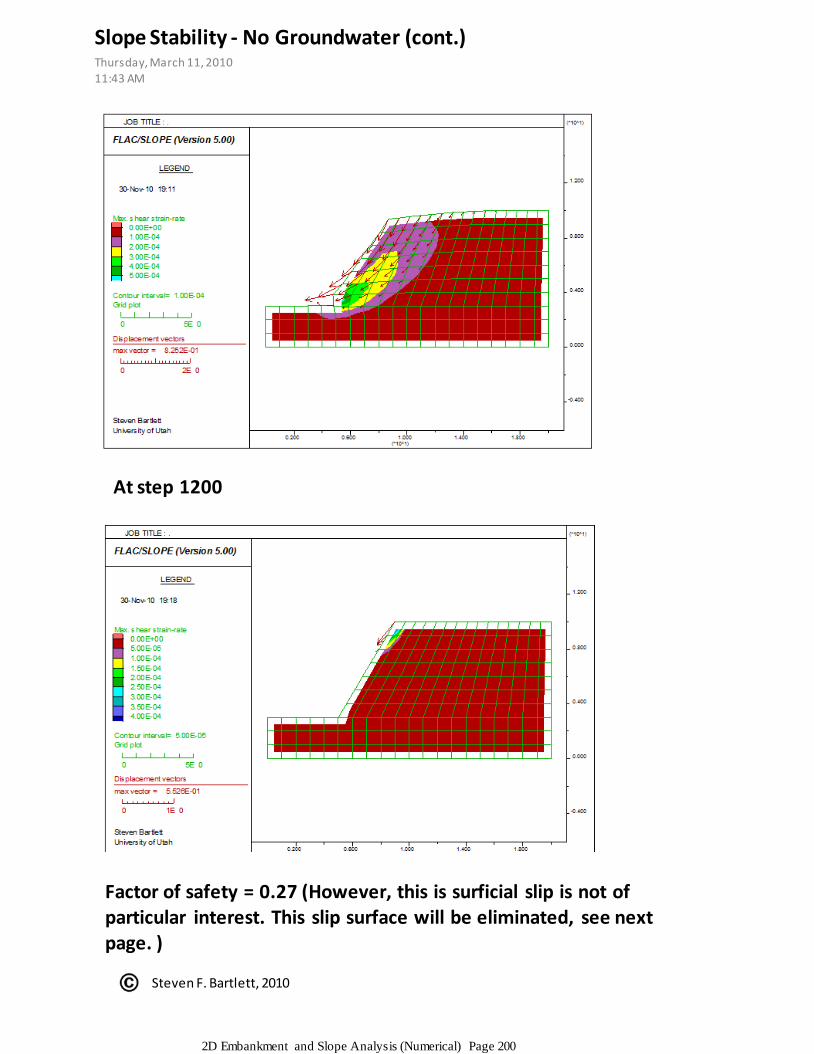
Steven F. Bartlett, 2010
At step 1200
Factor of safety = 0.27 (However, this is surficial slip is not of particular interest. This slip surface will be eliminated, see next page. )
Slope Stability - No Groundwater (cont.)Thursday, March 11, 201011:43 AM
2D Embankment and Slope Analysis (Numerical) Page 200

Steven F. Bartlett, 2010
Note that the surficial failure at the top of the slope can be prevented by slightly increasing the cohesive strength of the soil at the slope face. This often done to explore deeper failure surfaces in the soil mass.
The last part of the FLAC code has been modified to look like this:
; set cohesion to 0prop coh=0group 'Soil-Clay:low plasticity' i 6 j 4 10 model mohr group 'Soil-Clay:low plasticity' prop density=1900.0 bulk=1.33E6 shear=8E5 cohesion=100e3 friction=30.0 dilation=0.0 tension=0.0 group 'Soil-Clay:low plasticity'; use large strain logicset large;step 1200solve fos
Slope Stability - No Groundwater (cont.)Thursday, March 11, 2010
11:43 AM
2D Embankment and Slope Analysis (Numerical) Page 201

Steven F. Bartlett, 2010
Factor of safety = 0.58
(This is the true factor of safety of the slope for a rotation, slump failure.)
Slope Stability - No Groundwater (cont.)Thursday, March 11, 2010
11:43 AM
2D Embankment and Slope Analysis (Numerical) Page 202

© Steven F. Bartlett, 2011
Need to add here
Dynamic Response AnalysisSunday, August 14, 2011
3:32 PM
2D Embankment and Slope Analysis (Numerical) Page 203

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
2D Embankment and Slope Analysis (Numerical) Page 204

© Steven F. Bartlett, 2011
Lecture Notes○
Reading Assignment
Ch. 9 FHWA manual○
Foundations_vibrations.pdf○
Other Materials
Homework Assignment #8
B = 2 feet○
L = 2.6 feet ○
Vertical static = 12 kips○
Vertical dynamic = 2.4 kips (upward)○
Horizontal dynamic = 4 kips (in X direction = longest footing dimension)○
Moment about y axis = 9 kip feet○
The peak forces for the sign post from the dynamic numerical analysis are:1.
From this information, calculate the following:
FS bearing capacity failure○
FS sliding○
Maximum soil pressure○
Eccentricity in the x-direction○
Complete CVEEN 7330 Modeling Exercise 4 (FLACmodel4.pdf)2.
Seismic Design of Shallow FoundationsSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 205

© Steven F. Bartlett, 2011
All ground response consider thus far has not considered the effect of1.the structure on ground response. The presence of a structure, either buried or at the surface, changes the free-field motion.
In a manner similar to evaluation of seismic stability of slopes, earthquake effects on foundations can be modeled using either pseudo-static approach or a dynamic response approach.
2.
In the pseudo-static analysis, the effects of the dynamic earthquake-induced loads on the foundation are represented using static forces and moments. Typically, the pseudo-static forces and moments are calculated by applying a horizontal force equal to the weight of the structure times a seismic coefficient through the center of gravity of the structure.
a.
The seismic coefficient is generally a fraction of the peak ground acceleration for the design earthquake and may also be dependent upon the response characteristics of the structure, the behavior of the foundation soils, and the ability of the structure to accommodate permanent seismic displacement.
b.
In a dynamic response analysis, the dynamic stiffness and damping of the foundation is incorporated into a numerical model of the structure to evaluate the overall seismic response of the system and the interaction between the soil, foundation and structure.
3.
IntroductionSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 206

© Steven F. Bartlett, 2011
The bearing capacity and lateral resistance of a foundation is evaluated using static formulations and compared to pseudo-static loads.
Used often for "unimportant structures," where the gross stability of the foundation is to be evaluated.
○
The static shear strength may be either decreased or increased, depending on soil type and groundwater conditions, to account for dynamic loading conditions.
○
Dynamic forces are represented as pseudostatic forces and moments and are calculated by applying a horizontal force (weight time seismic coefficient) through the center of gravity of the structure. Seismic coefficients are usually a fraction of pga.
○
Seismic loads in structures are typically dominated by the inertial forces from the superstructure, which are predominantly horizontal.
However, these horizontal forces are transmitted to the foundation in the form of horizontal and vertical forces, and rocking and torsional moments.
In cases where a dynamic analysis has been completed for the structure, the peak loads, reduced by a peak load reduction factor, is used in the pseudo-static analysis.
○
The resultant load will usually have to be inclined or applied eccentrically to account for vertical loads and moment loadings.
Alternatively, vertical bearing capacity and horizontal sliding resistance of the foundation can be determined independently. However, the influence of the applied moments on the vertical and horizontal loads must be considered in the bearing capacity and sliding calculations (see figure on next page).
Pseudostatic ApproachSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 207
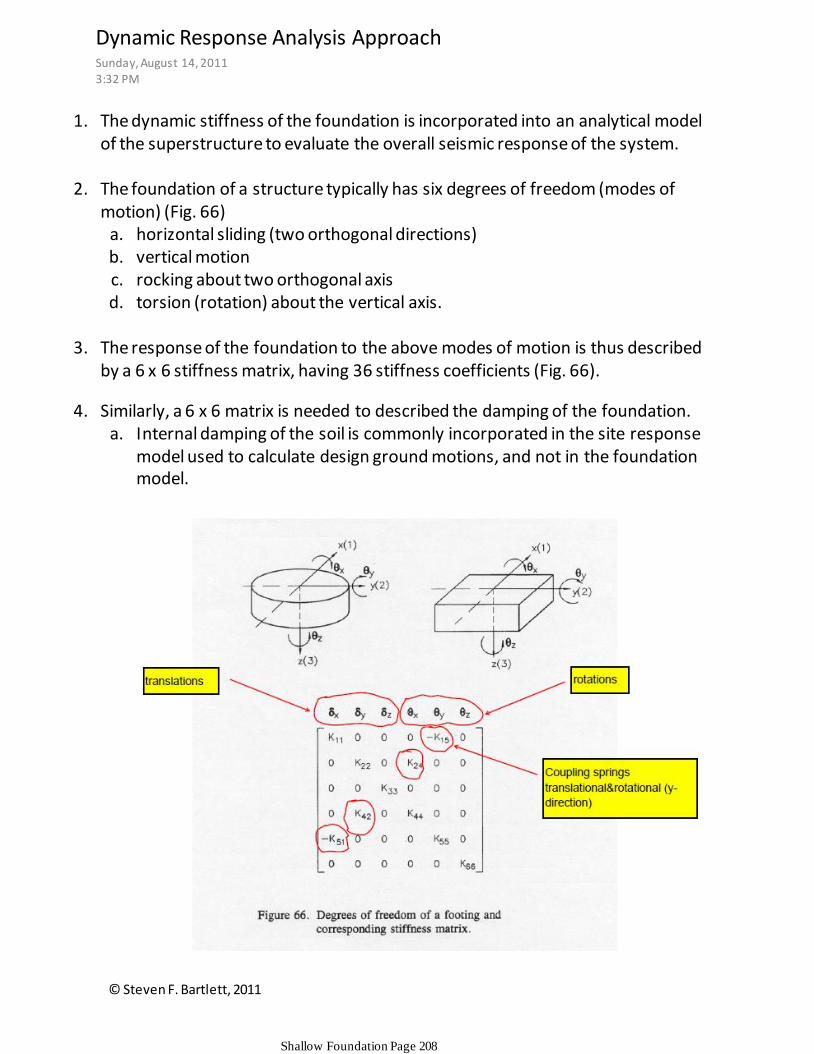
© Steven F. Bartlett, 2011
The dynamic stiffness of the foundation is incorporated into an analytical model of the superstructure to evaluate the overall seismic response of the system.
1.
horizontal sliding (two orthogonal directions)a.vertical motionb.rocking about two orthogonal axisc.torsion (rotation) about the vertical axis.d.
The foundation of a structure typically has six degrees of freedom (modes of motion) (Fig. 66)
2.
The response of the foundation to the above modes of motion is thus described by a 6 x 6 stiffness matrix, having 36 stiffness coefficients (Fig. 66).
3.
Internal damping of the soil is commonly incorporated in the site response model used to calculate design ground motions, and not in the foundation model.
a.Similarly, a 6 x 6 matrix is needed to described the damping of the foundation.4.
Dynamic Response Analysis ApproachSunday, August 14, 20113:32 PM
Shallow Foundation Page 208

Shallow Foundation Page 209

© Steven F. Bartlett, 2011
Typically, the geotechnical engineer provides the values of the stiffness and damping matrix to the structural engineer for use in the dynamic response analysis of the structure.
5.
Based on the results of the analysis, the structural engineer should then provide the peak dynamic loads and deformations of the foundation elements back to the geotechnical engineer.
6.
The geotechnical engineer then compares the dynamic loads and deformations7.to acceptable values to ascertain if the seismic performance of the foundation isacceptable. This sometimes is an iterative process to achieve a satisfactory design.
If a dynamic response of the structure-foundation is performed, the bearing capacity, sliding, overturning and settlement of the shallow foundation should be evaluated using pseudo-static limit equilibrium analysis.
8.
Dynamic Response Analysis Approach (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 210

© Steven F. Bartlett, 2011
Dynamic response analyses incorporate the foundation system into the general dynamic model of the structure. The combined analysis is commonly referred to as the soil-structure-interaction, SSI analysis. In SSI analyses, the foundation system can either be represented by a system of springs (classical approach), or by a foundation stiffness (and damping) matrix. The latter approach, commonly used for SSI analyses of highway facilities, is commonly referred to as the stiffness matrix method approach.
The general form of the stiffness matrix for a rigid footing was presented in figure 66 . The 6 x 6 stiffness matrix can be incorporated in most structural engineering programs for dynamic response analysis to account for the foundation stiffness in evaluating the dynamic response of the structural system. The diagonal terms of the stiffness matrix represent the direct response of a mode of motion to excitation in that mode while the off diagonal terms represent the coupled response. Many of the off diagonal terms are zero or close to zero, signifying that the two corresponding modes are uncoupled (e.g. , torsion and vertical motion) and therefore may be neglected. In fact, for symmetric foundations loaded centrically, rocking and sliding (horizontal translation) are the only coupled modes of motion considered in a dynamic analysis.
Often, all of the off-diagonal (coupling) terms are neglected for two reasons : (1) the values of these off-diagonal terms are small, especially for shallow footings; and (2) they are difficult to compute. However, the coupling of the two components of horizontal translation to the two degrees of freedom of rocking (tilting) rotation may be significant in some cases . For instance, coupled rocking and sliding may be important for deeply embedded footings where the ratio of the depth of embedment to the equivalent footing diameter is greater than five. The reader is referred to Lam and Martin (1986) for more guidance on this issue. The stiffness matrix, K, of an irregularly shaped and/or embedded footing can be expressed by the following general equation:
where KECF is the stiffness matrix of an equivalent circular surface footing, is
the foundation shape correction factor, and is the foundation embedment factor.
Dynamic Response Analysis (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 211

© Steven F. Bartlett, 2011
The solution for a circular footing rigidly connected to the surface of an elastic half space provides the basic stiffness coefficients for the various modes of foundation displacement. translation, the stiffness coefficient K33 can be expressed as:
For horizontal translation, the stiffness coefficients and K22 can be expressed as:
For torsional rotation, the stiffness coefficient K can be expressed as:
For rocking rotation, the stiffness coefficients K44 and K55 can be expressed as:
In these equations, G and v are the dynamic shear modulus and Poisson’s ratio for the elastic half space (foundation soil) and R is the radius of the footing.
The dynamic shear modulus, G, used to evaluate the foundation stiffness should be based upon the representative, or average, shear strain of the foundationsoil. However, there are no practical guidelines for evaluating a representative shear strain for a dynamically loaded shallow foundation. Frequently, the value of G, the shear modulus at very low strain, is used to calculate foundation stiffness. However, this is an artifact of the original development of the above equations for foundation stiffness for the design of machine foundations. For earthquake loading, it is recommended that values of G be evaluated at shear strain levels calculated from a seismic site response analysis.
StiffnessSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 212

© Steven F. Bartlett, 2011
One of the advantages of the stiffness matrix method over the classical approach is that a damping matrix can be included in SSI analysis. The format of the damping matrix is the same as the format of the stiffness matrix shown on figure 66. While coefficients of the damping matrix may represent both an internal (material) damping and a radiation (geometric) damping of the soil, only radiation damping is typically considered in SSI analysis.
The internal damping of the soil is predominantly strain dependent and can be
relatively accurately represented by the equivalent viscous damping ratio, . At the small strain levels typically associated with foundation response, is on the order of 2 to 5 percent. Radiation damping, i.e., damping that accounts for the energy contained in waves that ‘radiate” away from the foundation, is frequency-dependent and, in a SSI analysis, significantly larger than the material damping. Consequently, radiation damping dominates the damping matrix in SSI analyses.
The evaluation of damping matrix coefficients is complex and little guidance is available to practicing engineers. Damped vibration theory is usually used to form the initial foundation damping matrix. The theory, commonly used to study (small-strain) foundation vibration problems, assumes that the soil damping can be expressed via a damping ratio, D, defined as the ratio of the damping coefficient of the footing to the critical damping for the six-degree-of-freedom system.
The damping ratio for a shallow foundation depends upon the mass (or inertia) ratio of the footing. The following table lists the mass ratios and the damping coefficients and damping ratios for the various degrees of freedom of the footing. The damping ratios should be used as shown on figure 66 to develop the damping matrix of the foundation system. It should be noted that this approach only partially accounts for the geometry of the foundations and assumes that small earthquake strains are induced in the soil deposit. For pile foundations or for complex foundation geometry, a more rigorous approach, commonly referred to as the soil-foundation-structure-interaction (SFSI) analysis, may be warranted. SFSI is beyond the scope of this document.
Damping for Circular, Rigid FootingsSunday, August 14, 20113:32 PM
Shallow Foundation Page 213

© Steven F. Bartlett, 2011
Damping Table (Circular Footing)
Damping (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 214

© Steven F. Bartlett, 2011
Definition of variables on previous page
Damping (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 215

© Steven F. Bartlett, 2011
Application of the foundation stiffness general equation (K = KECF) for rectangular footings involves the following two steps:
Calculate the radius of an equivalent circular footing for the various modes of displacement using damping table and Figure 68. For vertical and horizontal (translational) displacements, the equivalent radius, r0, is the radius of a circular footing with the same area as the rectangular footing. For rocking and torsional motions, the calculation of the equivalent radius is more complicated, as it depends on the moment of inertia of the footing. The equivalent radius is then used in the stiffness equations to solve for the baseline stiffness coefficients required in the following formula: K = KECF.
1.
Damping for Rectangular FootingsSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 216

© Steven F. Bartlett, 2011
Find the shape factor a to be used in (K = KECF) using Figure 69. This figure gives the’ shape factors for various aspect ratios (LIB) for the various modes of foundation displacement.
2.
Damping for Rectangular Footings (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 217

© Steven F. Bartlett, 2011
Embedment
The influence of embedment on the response of a shallow foundation is described in detail in Lam and Martin (1986). The values of the foundation embedment factor from that study are presented in figure 70 for values of D/R less than or equal to 0.5 and in Figure 71 for values of D/R larger than 0.5. For cases where the top of the footing is below the ground surface, it is recommended that the thickness of the ground above the top of the footing be ignored and the thickness of the footing (not the actual depth of embedment Df) be used to calculate the
embedment ratio (D/R) in determining the embedment factor .
Damping for Rectangular Footings (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 218

© Steven F. Bartlett, 2011
Embedment (cont.)
Damping for Rectangular Footings (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 219

© Steven F. Bartlett, 2011
Method 1 - Seismic loads from dynamic response analysis
Potential for amplification of ground motion by the structure is included in the peak loads from the dynamic response analysis
○
Combination of loads from dynamic response analysis (vertical and horizontal) for use in bearing capacity, sliding and overturning evaluations.
○
Assume 100% peak vertical (2 cases; 100 percent upward and 100 percent downward) and 40% peak horizontal, applied in the direction that is most critical for stability. Generally 100 percent peak vertical in the downward directions controls the design.
Do not forget to apply the static dead loads (both horizontal and vertical) and static moments. These should be added to the seismic loads.
Common Approach for bearing capacity○
Load Evaluation - Loads from Dynamic Response AnalysisSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 220

© Steven F. Bartlett, 2011
Method 2 - Pseudostatic seismic loads from pga and seismic coefficient
seismic loads = (weight of structure) x (seismic coefficient)○
use peak ground acceleration from AASHTO maps (10 probability of exceedance in 50 years, or
0.5 x pga (for structures that can tolerate some deformation, or
use pga (for structures that can not tolerate large deformations)
for such structures, the design acceleration should be the spectral acceleration associated with the fundamental period of the structure. This acceleration should be factored according to requirements outlined in the appropriate design code.
□
consider potential amplification of horizontal acceleration for slender flexible structures.
no general guidance for selection of seismic coefficient, some possible approaches are:
○
Combination of loads (vertical and horizontal)○
(Common Approach for Bearing Capacity). Assume the horizontal and vertical loading is independent, (i.e., assume that it is highly unlikely that peak vertical and peak horizontal force will occur at the same time during the earthquake strong ground motion record, thus vertical and horizontal inertial loads can be considered separately for bearing capacity calculation).
vertical load, if applied centrically will generate only vertical forces on the foundation
if vertical load is applied eccentrically, it will generate a vertical force and a moment
both compressive and tensile vertical loads should be considered
horizontal load, if applied eccentrically, will generate a horizontal load and a moment.
Do not forget to apply the static dead loads (both vertical and horizontal) to the seismic loads.
Load Evaluation (cont.) - Loads from Pseudostatic AnalysisSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 221

© Steven F. Bartlett, 2011
Compute the earthquake loads (from Method 1 or Method 2 above) and combine1.
For Method 1, use the 100% and 40% of peak inertial force rule to determine the lowest factor of safety.
○
For Method 2, remember that vertical and horizontal earthquake loads are treated separately (do not apply peak horizontal and peak vertical ground acceleration at the same time).
○
into a single resultant force with an inclination of α and an eccentricity, e (fig 65).
Load eccentricity is caused by the applied moment to the foundation○
Applied moment causes a non-uniform pressure distribution on the bottom of the footing.
○
Equivalent footing width (B') is computed for the footing, where the width of the footing is reduced, to account for load eccentricity
○
B' = (B-2e) (Meyerhof, 1953)B' = (3B/2-3e) (linear soil pressure distribution)(The calculated values from the above equations tend to be conservative the contact area is usually larger than the calculated values)
Commonly used relations for B'○
e < B/6 (Hansen, 1953) (for ah < 0.4 g)e < B/4 (Hansen, 1953) (for ah > 0.4 g)
limit to eccentricity (to prevent uplift)○
Adjust of Bearing Capacity Equation for Eccentric (Moment) Loading2.
Check bearing capacity with loadings from Method 1 or 2.3.
Report the lowest factor of safety that controls the design.4.
Check sliding factor of safety.5.
Evaluation Steps - Bearing CapacitySunday, August 14, 2011
3:32 PM
Shallow Foundation Page 222

© Steven F. Bartlett, 2011
Sliding resistance should be assessed separately from the bearing capacity○
evaluation.
Assume 100% peak horizontal inertial load and 40% peak vertical inertial load (2 cases; 40% upward and 40% downward).
Also, check 40% peak horizontal and 100% peak vertical (2 cases; 100 percent upward and 100 percent downward).
Apply combinations in the direction that is most critical for sliding and gives the lowest factor of safety.
Load combinations (Method 1 or 2) Common approach for sliding○
frictional resistance (σv tan φ)
adhesion and the interface frictional resistance of the base depend on the type of soil and the type and finish of the foundation material.
□
For concrete foundations, the adhesion and interface friction coefficient should be reduced by approximately 20 to 33 percent from the cohesion and friction coefficient of the underlying soils (see Navy Design Manual DM 7.2). Values from this manual can be used for both shallow foundations and retaining wall.
□
adhesion (a)
For eccentrically loaded foundations, the effective base area (B' x L') should be used in evaluating sliding resistance.
For embedded foundations the passive seismic resistance in front (leading edge) of the foundation may be included, however the passive earth pressure is typcially reduced by a factor of two to account for the large deformation required to mobilize full passive resistance.
active seismic force on the back (trailing edge) of the foundation should be added to the seismic driving force.
In many cases, the net result calculated from factoring the passive seismic resistance and adding the active seismic force, produces very little change in the overall sliding factor of safety for shallow foundations; hence embedment is sometimes ignored in sliding calculations
Resistance to sliding:○
Sliding CalculationsSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 223

© Steven F. Bartlett, 2011
Definitions for use of Myerhof's equations
Need to use general bearing capacity equation to account for eccentric loads, moments, inclined loads, and different foundation shapes.
○
Myerhof's MethodSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 224

© Steven F. Bartlett, 2011
Bearing capacity factors
Inclination factors
Myerhof's Method (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 225

© Steven F. Bartlett, 2011
Shape factors for L < 6B
Myerhof's Method (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 226

© Steven F. Bartlett, 2011
Myerhof (Example) - Loading from Dynamic Analysis
Example CalculationSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 227

© Evert C. Lawton, 2011
Soil PressureSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 228

© Steven F. Bartlett, 2011
Machine VibrationsSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 229

Machine Vibrations from Vertical SourceSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 230

© Steven F. Bartlett, 2011
Shallow Foundation Page 231

© Steven F. Bartlett, 2011
Machine Vibrations from Vertical Source (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 232

© Steven F. Bartlett, 2011
Idealization of a system using a spring with a dynamic stiffiness, Kz and a viscous dashpot Cz undergoing a harmonic loading of Pz.
Machine Vibrations from Vertical Source (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 233

© Steven F. Bartlett, 2011
Dynamic stiffness = static stiffness x dynamic stiffness coefficient. See chart A, next page for k(w) values.
Do not need these for FLAC modeling
Machine Vibrations from Vertical Source (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 234

© Steven F. Bartlett, 2011
Machine Vibrations from Vertical Source (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 235

© Steven F. Bartlett, 2011
FLAC Model with 3-D (i.e., radiation) damping
Machine Vibrations from Vertical Source (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 236
© Steven F. Bartlett, 2011
FLAC formulation for radiation damping
Machine Vibrations from Vertical Source (cont.)Sunday, August 14, 2011
3:32 PM
Shallow Foundation Page 237

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 238

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
Shallow Foundation Page 239

© Steven F. Bartlett, 2011
Lecture Notes○
Reading Assignment
FLAC manual on interfaces○
Other Materials
Homework Assignment #9
Complete FLAC model 5.pdf1.Complete FLAC model 6.pdf2.Analyze the pseudo static factor of safety against sliding for each layer and the base of the geofoam embankment using the geometry and properties given FLAC model 6.pdf. Use the design spectrum shown below to determine the appropriate accelerations in each layer. Develop a spreadsheet to do this analysis.
3.
Geofoam Embankments Seismic StabilitySunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 240

© Steven F. Bartlett, 2011
Typical Geofoam Construction•Seismic Hazard in Utah•Modeling Approach•
Sliding•Rocking/Uplift•Overstressing (yielding)•
Seismic Evaluations•
Topics
Reduces seismic loads to wall & buried structures•Improves slope stability (static & dynamic)•Reduces consolidation settlement on soft ground•
Light weight material•
Can undergo elastic and plastic deformation but maintains shape•Controlled Compression (Compression Inclusion)•
Geofoam Advantages
Geofoam EmbankmentsSunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 241

© Steven F. Bartlett, 2011
Geofoam Construction Sunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 242

© Steven F. Bartlett, 2011
Geofoam Construction (cont.)Sunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 243

Geofoam Construction (cont.)Sunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 244

© Steven F. Bartlett, 2011
Geofoam Embankments Page 245

Develop a more comprehensive numerical method for evaluating seismic stability of geofoam embankments
•
sliding performance at horizontal layer interfaces•rocking/uplift at edge of the embankment•
Compression○
Tension○
Shear○
overstressing of geofoam block from seismic forces•
Evaluate potential failure modes•
© Steven F. Bartlett, 2011
Case Earthquake M R
(km)
Component PGA (g)
1 1989 Loma Prieta, CA 6.9 8.6 Capitola 000 0.52
2 1989 Loma Prieta, CA 6.9 8.6 Capitola 090 0.44
3 1999 Duzce, Turkey 7.1 8.2 Duzce 180 0.35
4 1999 Duzce, Turkey 7.1 8.2 Duzce 270 0.54
5 1992 Cape Mendocino,
CA
7.1 9.5 Petrolia 000 0.59
6 1992 Cape Mendocino,
CA
7.1 9.5 Petrolia 090 0.66
7 1994 Northridge, CA 6.7 6.2 Sylmar 052 0.61
8 1994 Northridge, CA 6.7 6.2 Sylmar 142 0.90
Selected Time History
Failure Modes and Seismic InputsSunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 246

© Steven F. Bartlett, 2011
Response Spectra (5% Damping)
Motion 1 Motion 2 Motion 3 Motion 4 Motion 5 Motion 6 Motion 7 Motion 8
Spectra
l Accele
ratio
n (g
)
Period (sec)
0.0
0.5
1.0
1.5
2.0
2.5
0 1 2 3 4 5
Horizontal Spectra
Response Spectra (5% Damping)
Motion 4 Motion 1 Motion 2 Motion 3
Spectral A
ccele
ration (
g)
Period (sec)
0.0
0.5
1.0
1.5
2.0
2.5
0 1 2 3 4 5
Vertical Spectra
Seismic Inputs (cont.)Sunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 247

© Steven F. Bartlett, 2011
• FLAC (Fast Lagrangian Analysis of Continua)
• 2D or 3D
• Explicit Finite Difference Method
• Large Strain Mode
• Sliding and Separation at Nodal Interfaces
• Nonlinear Modeling capability
• Elasto-Plastic Model w/ Mohr-Coulomb Failure
Criteria and Plastic Post-Yield Behavior
• Hysteretic damping
Modeling ApproachSunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 248

© Steven F. Bartlett, 2011
Elastic PropertiesSunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 249

Typical freestanding geofoam embankment at bridge approach. Note that continuous horizontal planes are created by the block placement pattern. Question: Could sliding occur along these interface planes during a major earthquake?
Steven F. Bartlett, 2010
Interface SlidingThursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 250

Steven F. Bartlett, 2010
Normal and shear stiffness at the interfaces are also required by FLAC. These are spring constants that represent the respective stiffness between two planes that are in contact with each other. Interfacial stiffness is often used in FLAC to represent the behavior of rock joints where some elastic deformation in the joint is allowed before slippage occurs. However for geofoam block placed in layers, such elastic behavior before slippage occurs is probably small. Thus, for the case where only slippage and separation are considered at the interface (i.e., one geofoam subgrid is allowed to slide and/or open relative to another subgrid), the normal and shear stiffnesses used in the FLAC model are not important (Itasca. 2005). For this case, the FLAC user’s manual recommends that the normal and shear interface stiffness (kn and ks, respectively) be set to ten times the stiffness of the neighboring zone.
More on interface properties
Interface PropertiesThursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 251

Steven F. Bartlett, 2010
Interface Sliding (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 252
Steven F. Bartlett, 2010
CONCLUSIONS
In general. the majority of the evaluated cases suggest that interlayer sliding is within tolerable limits (0.01 to 0.1 m) however, two input time histories produced interlayer sliding that was greater than 0.5 in.. which is considered unacceptable from a performance standpoint Because the model predicted a wide range of interlayer sliding displacement for the cases analyzed, this suggests that sliding is a highly nonlinear process and is strongly governed by the frequency content and long period displacement pulses present in the input time histories.
The model also suggests that interlayer sliding displacement can, in some cases1 increase when the vertical component of strong motion is included in the analysis For cases where interlayer sliding is just initiating, the sliding displacement increases by a factor of 2 to 5 times when the vertical component of strong motion is added to the analyses However, when the interlayer sliding displacements are larger. the presence of the vertical component in the model is less important and the displacements remain the same or only slightly increase. Thus, we conclude that it is generally unconservative to ignore the vertical component of strong motion when estimating sliding displacement, but its inclusion is less important when the interlayer sliding displacement is well developed. All models showed that the interlayer sliding is generally concentrated in the basal layers and diminishes greatly in the higher layers. The potential for interlayer sliding displacement in geofoam embankments can be resolved by constructing shear keys within the geofoam mass to disrupt continuous horizontal layers that are being created by current construction practices
The numerical model also suggests that internal deformation caused by rocking and sway can cause local tensile yielding of some blocks within the embankment, usually near the base.. In some cases, this yielding can propagate upward and cause the embankment to begin to decouple dynamically. Consideration should be given to using blocks with higher strengths than Type VIII geofoam in the basal zones of geofoam embankments undergoing high levels of strong motion.
Interface Sliding (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 253

© Steven F. Bartlett, 2011
The potential for initiation of interlayer and basal sliding of a geofoam embankment can also be evaluated using pseudo static techniques. This type of analysis is useful for evaluating the stability of simple systems when the embankment cross-section is a simple rectangle. In this approach, the inertial horizontal force acting on the geofoam embankment is applied at the centroid of the mass, which is usually at the top of the embankment. To calculate the appropriate acceleration, the geofoam is treated as a single degree of freedom (SDOF) oscillator (Horvath, 1995) and its fundamental period, T0, is estimated using Horvath (2004):
T0 = 2[(v H)/(E*g)[4(H/B)2 + (12/5)(1+0.5
where: v is the vertical effective stress acting on the top of the geofoam from applied dead loads (i.e., pavement section), H is the geofoam embankment height, E is the initial Young’s modulus of the geofoam, g is the gravitational
constant, B is the width of the geofoam embankment and is Poisson’s ratio.
The horizontal inertial force, Fh, produced by the earthquake is applied to the centroid of the lumped mass, which is approximately located at the top of the embankment near the mid-point of the pavement section:
Fh = Sa * m
where: Sa is the spectral acceleration corresponding to T0 obtained from the design basis earthquake acceleration response spectrum and m is the lumped mass of the system (combined mass of the pavement, road base and concrete load distribution slab). In the U.S., geofoam embankment is often considered to be a “retaining” structure/wall and as such, it is designed for a 5 percent damped Sa value that has a 10 percent probability of being exceeded in 50 years (i.e., average return period of 475 years) as specified by the American Association of Highway and Transportation Officials (AASHTO, 2010).
An example 5 percent damped AASHTO spectrum for such an event is shown in on the next page.
Pseudo-static Sliding CalculationSunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 254

© Steven F. Bartlett, 2011
Material Type Layer No. Thickness(m)
ρ 4
(kg/m3)E 5
(MPa)6 K 7
(MPa)G 8
(MPa)
Foundation Soil 1-10 varies 1840 174 0.4 290.0 62.1
Geofoam 11-18 8 18 10 0.103 4.2 4.5
UTBC1 19 0.610 2240 570 0.35 633 211
LDS2 & PCCP3 19 0.508 2400 30000 0.18 15625 12712
1 Untreated base course, 2 Load distribution slab, 3 Portland concrete cement pavement, 4
Mass density, 5 Initial Young’s modulus, 6 Poisson’s ratio, 7 Bulk modulus, 8 Shear modulus
In applying pseudo static techniques to interlayer and basal sliding evaluations, values of horizontal acceleration at various heights within the embankment are linearly interpolated, starting at the top of the EPS embankment and continuing to its base (NCHRP 529) . The horizontal acceleration acting at the top interface of the embankment is the Sa value from the design spectrum at T=0.52s, which is of 0.848 g for the example case ; the horizontal acceleration at the basal EPS/foundation soil interface is peak horizontal ground acceleration (pga), which is 0.339 g for the example case and corresponds to the spectral acceleration at T=0 s.
Pseudo-static Sliding Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 255

© Steven F. Bartlett, 2011
Subsequently, force equals mass time acceleration is applied to the interpolated acceleration values at each interface elevation to estimate the inertial sliding force acting at that interface (see table next page). The frictional sliding resistanceof the interface is calculated using the normal stress (i.e., vertical stress) acting at the interface multiplied by interface coefficient of friction and by the percentage of area available to resist sliding (expressed in decimal fraction). (The weight of the EPS is usually neglected in calculating the normal stress.) In this calculation, the coefficient of friction for geofoam-to-geofoam and geofoam-to-soil interfaces was estimated to be 0.8 and 0.6, respectively, based on direct shear testing from the I-15 Reconstruction Project (Bartlett et al. 2000). In addition, any potential bonding that develops between the EPS and the overlying concrete load distribution slab was ignored in this example at interface 9 ; but such a bond shear strength could be include if: (1) it can be reasonably obtained from experimental data, and (2) such a bond can be shown to persist throughout the design life of the embankment.
The recommended factor of safety against interlayer and basal sliding is 1.2 to 1.3, which may not be achieved at all interfaces relying on frictional resistance solely. For interfaces where unacceptably low safety factors are calculated, shear keys can be constructed during the placement of the geofoam block to reduce the potential for interlayer sliding. Such keys disrupt the development of horizontal sliding planes during earthquake shaking and are constructed by periodically placing half-height blocks in the geofoam mass followed by placing full-height block in the successive layer . The full-height block placed in the key acts as a barrier to sliding and the shear resistance of the block is mobilized to resist sliding. Therefore, the key greatly improves the factor of safety against interlayer sliding due to the relatively high shear strength of the EPS block. The resisting force provided by the key is calculated by multiplying the shear strength of the block by the percentage of area occupied by the key. We note that if a shear key is used at a particular interface, the area available for frictional contact must be reduced correspondingly when calculating the resisting sliding force.
Pasted from <file:///C:\Users\sfbartlett\Documents\My%20Papers\UDOT%20Geofoam\UDOT%20EPS%20Report.docx>
Pseudo-static Sliding Calculation (cont.)Sunday, August 14, 20113:32 PM
Geofoam Embankments Page 256

© Steven F. Bartlett, 2011
H = 8 m
Block thickness =
0.81 m
number of interfaces
9
normal stress 25.36 kPa
interface friction
0.8 (geofoam -geofoam)
interface friction
0.6 (geofoam - soil)
geofoam shear strength
23 psi (EPS19 used in shear key)
geofoam shear strength
157.3 kPa
Horiz. mass inertial resisting shear resisting FS
interface Accel. (kg/m3) force sliding key force sliding
# (g) (N/m3) force coverage
from key
(w / key)
(N/m3) (%) (N/m3)
9 0.848 2585 21497 19073 6 9439 1.33
8 0.791 2585 20064 19478 4 6293 1.28
7 0.735 2585 18631 19681 3 4720 1.31
6 0.678 2585 17198 19884 2 3146 1.34
5 0.622 2585 15765 20087 1 1573 1.37
4 0.565 2585 14332 20290 0 0 1.42
3 0.509 2585 12898 20290 0 0 1.57
2 0.452 2585 11465 20290 0 0 1.77
1 0.396 2585 10032 20290 0 0 2.02
0 0.339 2585 8599 15217 0 0 1.77
Pasted from <file:///C:\Users\sfbartlett\Documents\My%20Papers\UDOT%20Geofoam\UDOT%20EPS%20Report.docx>
Pseudo-static Sliding Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 257

© Steven F. Bartlett, 2011
Shear KeySunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 258

joint, fault or bedding planes in a geologic medium○
interface between a foundation element and the soil○
contact plane between a bin or chute and the material that it contains○
contact between two colliding objects.○
There are several instances in geomechanics in which it is desirable to represent planes on which sliding or separation can occur:
Friction○
Cohesion○
Dilation○
Normal stiffness○
Shear stiffness○
Tensile Strength○
FLAC provides interfaces that are characterized by Coulomb sliding and/or tensile separation. Interfaces have one or more of the following properties:
Although there is no restriction on the number of interfaces or the complexity of their intersections, it is generally not reasonable to model more than a few simple interfaces with FLAC because it is awkward to specify complicated interface geometry. The program UDEC (Itasca 2004) is specifically designed to model many interacting bodies; it should be used instead of FLAC for the more complicated interface problems.
An interface can also be specified between structural elements and a grid, or between two structural elements. Interfaces may also be used to join regions that have different zone sizes. In general, the ATTACH command should be used to join sub-grids together. However, in some circumstances it may be more convenient to use an interface for this purpose. In this case, the interface is prevented from sliding or opening because it does not correspond to any physical entity.
Steven F. Bartlett, 2010
More on Interfaces in FLACThursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 259

Steven F. Bartlett, 2010
Interface Properties
Interfaces (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 260

Steven F. Bartlett, 2010
Interfaces (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 261

Steven F. Bartlett, 2010
Interface Used to Join Two Sub-Grids○
Real Interface — Slip and Separation Only○
Real Interface — All Properties Have Physical Significance○
Shear and normal stiffness (cases)
Interface Used to Join Two Sub-Grids
Interfaces (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 262

Steven F. Bartlett, 2010
Real Interface — Slip and Separation Only
Interfaces (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 263

Steven F. Bartlett, 2010
Real Interface — All Properties Have Physical Significance
Interfaces (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 264

© Steven F. Bartlett, 2011
The angle of dilation controls an amount of plastic volumetric strain developed during plastic shearing and is assumed constant during plastic yielding. The value of ψ=0 corresponds to the volume preserving deformation while in shear.Clays (regardless of overconsolidated layers) are characterized by a very low amount of dilation (ψ≈0). As for sands, the angle of dilation depends on the angle of internal friction. For non-cohesive soils (sand, gravel) with the angle of internal friction φ>30° the value of dilation angle can be estimated as ψ=φ-30°. A negative value of dilation angle is acceptable only for rather loose sands. In most cases, however, the assumption of ψ = 0 can be adopted.
Pasted from <http://www.finesoftware.eu/geotechnical-software/help/fem/angle-of-dilation/>
How does dilatancy affect the behavior of soil?
No dilatancy, dilatancy angle = 0. Note that the unit square has undergone distortion solely.
Dilatancy during shear. Note that the unit square has undergone distortion and volumetric strain (change in volume).
Dilatancy AngleWednesday, August 17, 2011
12:45 PM
Geofoam Embankments Page 265

© Steven F. Bartlett, 2011
Soils dilate (expand) or contract upon shearing and the degree of this dilatancy
can be explained by the dilatancy angle, .
The dilatancy angle can be calculated from the Mohr's circle of strain, see previous page. It can also be estimated from the following formulas.
This element is dilating during shear. This is plastic behavior.
Dilatancy Angle RelationshipsWednesday, August 17, 2011
12:45 PM
Geofoam Embankments Page 266

Steven F. Bartlett, 2010
Solution for dilation angle for Fig. 3.58 in FLAC manual.
solving for the dilation angle:
taking the sin of the dilation angle:
simplifying:
from Eq. 4.18 in Salgado
simplifies to:
the results are the same
Note: A negative sign was added here to be consistent with Salgado Eq. 4-15. Also, the relation between dev and de1 and de3 is from Eq. 4-17 in Salgado
Dilatancy Angle (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 267

Steven F. Bartlett, 2010
Dilatancy Angle from Triaxial TestThursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 268

Steven F. Bartlett, 2010
Dilatancy Angle - Typical ValuesThursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 269

Steven F. Bartlett, 2010
Interface
configset largeg 20 21model elasgen 0,0 0,10 21,10 21,0; scales model to 1 cmini x mul 0.01ini y mul 0.01; creates horz. gap in gridmodel null j 11; creates gap on both sides of upper part of gridmodel null i 1,4 j 12,21model null i 17,20 j 12,21; reconnects the gridini x add .005 j 12 22ini y add -.00475 j 12 22
Simple Interface Model - Direct Shear FLAC ExampleThursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 270

Steven F. Bartlett, 2010
; creates interfaceint 1 Aside from 1,11 to 21,11 Bside from 5,12 to 17,12int 1 kn 10e7 ks 10e7 cohesion 0 fric 35 dil 5; elastic properties for modelprop dens 2000 bulk 8.3e6 shear 3.85e6; boundary conditionsfix x y j=1fix x i=1 j 1,11fix x i=21 j=1,11; apply pressure at top of modelapply p=50e3 i=5,17 j=22;his 999 unb; consolidates sample under applied pressuresolve;; starts shear part of testini xvel 5e-7 i= 5,17 j 12,22fix x i= 5,17 j 12,22; reinitializes displacements to zeroini xdis 0.0 ydis 0.0
Simple Interface Model (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 271

Steven F. Bartlett, 2010
; functions to calculate shear stress and displacementscall int.fin ; this needs to be in default folderdef ini_jdisp njdisp0 = 0.0 sjdisp0 = 0.0 pnt = int_pnt loop while pnt # 0 pa = imem(pnt+$kicapt) loop while pa # 0 sjdisp0 = sjdisp0 + fmem(pa+$kidasd) njdisp0 = njdisp0 + fmem(pa+$kidand) pa = imem(pa) end_loop pa = imem(pnt+$kicbpt)loop while pa # 0 sjdisp0 = sjdisp0 + fmem(pa+$kidasd) njdisp0 = njdisp0 + fmem(pa+$kidand) pa = imem(pa)end_loop pnt = imem(pnt)end_loopendini_jdisp;
Simple Interface Model (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 272

def av_strwhilestepping sstav = 0.0 nstav = 0.0 njdisp = 0.0 sjdisp = 0.0 ncon = 0 jlen = 0.0 pnt = int_pnt loop while pnt # 0 pa = imem(pnt+$kicapt) loop while pa # 0 sstav = sstav + fmem(pa+$kidfs) nstav = nstav + fmem(pa+$kidfn) jlen = jlen + fmem(pa+$kidlen) sjdisp = sjdisp + fmem(pa+$kidasd) njdisp = njdisp + fmem(pa+$kidand) pa = imem(pa) end_loop pa = imem(pnt+$kicbpt) loop while pa # 0 ncon = ncon + 1 sstav = sstav + fmem(pa+$kidfs) nstav = nstav + fmem(pa+$kidfn) jlen = jlen + fmem(pa+$kidlen) sjdisp = sjdisp + fmem(pa+$kidasd) njdisp = njdisp + fmem(pa+$kidand) pa = imem(pa) end_loop pnt = imem(pnt)end_loopif ncon # 0 sstav = sstav / jlen nstav = nstav / jlen sjdisp = (sjdisp-sjdisp0) / (2.0 * ncon) njdisp = (njdisp-njdisp0) / (2.0 * ncon)endifend
Simple Interface Model (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 273

Steven F. Bartlett, 2010
hist sstav nstav sjdisp njdispstep 22000save directshear.sav 'last project state'
Simple Interface Model (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 274

Steven F. Bartlett, 2010
FLAC (Version 5.00)
LEGEND
6-Oct-10 6:59
step 27927
HISTORY PLOT
Y-axis :
Rev 1 sstav (FISH)
X-axis :
3 sjdisp (FISH)
2 4 6 8 10
(10 )-03
0.500
1.000
1.500
2.000
2.500
3.000
3.500
(10 ) 04
JOB TITLE : .
Steven Bartlett
University of Utah
FLAC (Version 5.00)
LEGEND
6-Oct-10 6:59
step 27927
HISTORY PLOT
Y-axis :
4 njdisp (FISH)
X-axis :
3 sjdisp (FISH)
2 4 6 8 10
(10 )-03
0.000
1.000
2.000
3.000
4.000
5.000
(10 )-04
JOB TITLE : .
Steven Bartlett
University of Utah
Simple Interface Model (cont.)Thursday, March 11, 2010
11:43 AM
Geofoam Embankments Page 275

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 276

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
Geofoam Embankments Page 277

© Steven F. Bartlett, 2011
Lecture Notes○
Reading Assignment
○
Other Materials
Homework Assignment #10
Complete FLAC model 7.pdf1.Use the analysis approach discussed in the liquefaction remediation section to design a remediation for the problem presented in FLAC model 7.pdf
2.
LiquefactionSunday, August 14, 2011
3:32 PM
Liquefaction Page 278

© Steven F. Bartlett, 2011
During strong earthquake shaking. loose. saturated cohesionless soil deposits may experience a sudden loss of strength and stiffness. sometimes resulting in loss of bearing capacity. large permanent lateral displacements. And/or seismic settlement of the ground. This phenomenon is called soil liquefaction.
Pasted from <http://www.ndmc.gov.za/Hazards/Natural/Seismic/Liquefaction.aspx>
Pasted from <http://www.ce.washington.edu/~liquefaction/html/what/what2.html>
Liquefaction ModelingSunday, August 14, 2011
3:32 PM
Liquefaction Page 279

© Steven F. Bartlett, 2011
Accelerations and Pore Pressure Generation During LiquefactionSunday, August 14, 2011
3:32 PM
Liquefaction Page 280

© Steven F. Bartlett, 2011
Flow Failure (large displacement)
Deformation Failure - sometime called cyclic mobility (smaller displacement)
Flow Failure versus Deformation FailureSunday, August 14, 2011
3:32 PM
Liquefaction Page 281

© Steven F. Bartlett, 2011
Flow Failure
Deformation Failure
Stable Slope
Flow Failure versus Deformation FailureSunday, August 14, 2011
3:32 PM
Liquefaction Page 282

© Steven F. Bartlett, 2011
Pasted from <http://www.ce.washington.edu/~liquefaction/selectpiclique/dams/sheffielddam1.jpg>
1971 San FernandoDam
Sheffield Dam
Flow FailuresSunday, August 14, 2011
3:32 PM
Liquefaction Page 283

© Steven F. Bartlett, 2011
Pasted from <http://www.ce.washington.edu/~liquefaction/selectpiclique/rivers/motagua.jpg>
Pasted from <http://www.geerassociation.org/GEER_Post%20EQ%20Reports/Tecoman_2003/c-liq.html>
Deformation FailuresSunday, August 14, 2011
3:32 PM
Liquefaction Page 284

© Steven F. Bartlett, 2011
Definition of Liquefaction, ru = 1, where ru is the pore pressure ratio
For laboratory
Ru = u / 'c'c = effective confining stress in the triaxial cell
(NRC, 1985)
For field
Definition of LiquefactionSunday, August 14, 2011
3:32 PM
Liquefaction Page 285

© Steven F. Bartlett, 2011
Note the onset of large deformation noting liquefaction
Cyclic Behavior of Loose SandSunday, August 14, 2011
3:32 PM
Liquefaction Page 286

© Steven F. Bartlett, 2011
Cyclic Behavior of Dense SandSunday, August 14, 2011
3:32 PM
Liquefaction Page 287

© Steven F. Bartlett, 2011
Counting Cycles to LiquefactionSunday, August 14, 2011
3:32 PM
Liquefaction Page 288
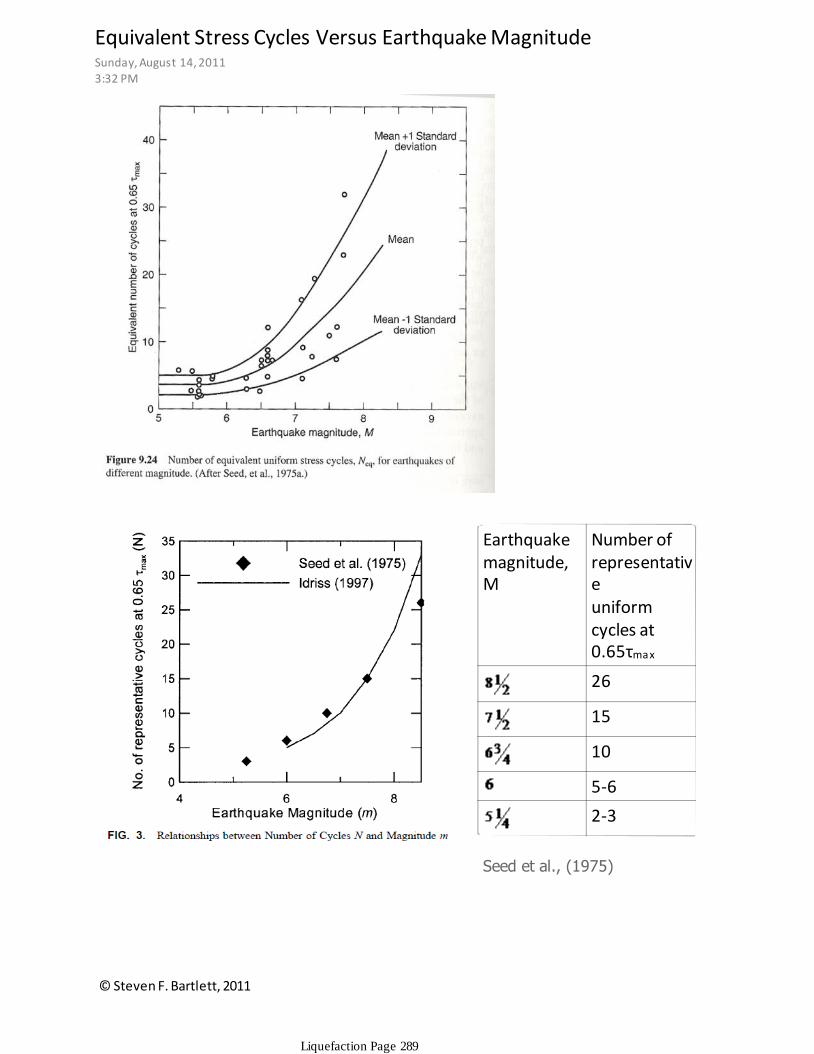
© Steven F. Bartlett, 2011
Earthquake magnitude, M
Number of representative uniform cycles at 0.65τmax
26
15
10
5-6
2-3
Seed et al., (1975)
Equivalent Stress Cycles Versus Earthquake MagnitudeSunday, August 14, 2011
3:32 PM
Liquefaction Page 289

© Steven F. Bartlett, 2011
Number of Cycles to LiquefactionSunday, August 14, 2011
3:32 PM
Liquefaction Page 290

© Steven F. Bartlett, 2011
For = 1
Pore Pressure Buildup Versus No. of CyclesSunday, August 14, 2011
3:32 PM
Liquefaction Page 291

© Steven F. Bartlett, 2011
When ru reaches 1.0, then complete liquefaction has occurred.
= (max - residual) (1-ru) + residual
Functions to degrade residual strength and shear modulus according to ru
G = (Gmax - Gresidual) (1-ru)1/2 + Gresidual
Pore Pressure Generation Scheme for ModelingSunday, August 14, 2011
3:32 PM
Liquefaction Page 292

© Steven F. Bartlett, 2011
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0 5 10 15 20
(N1)60cs
S r/G
r
Sr/Gr ratio = shear strain (decimal fraction)
Relating Residual Strength with Residual Shear ModulusSunday, August 14, 2011
3:32 PM
Liquefaction Page 293

© Steven F. Bartlett, 2011
Beaty and Byrne, 1999
Soft reloading curve = 10 percent of stiff unloading curve
Strain - Strain LoopsSunday, August 14, 2011
3:32 PM
Liquefaction Page 294

© Steven F. Bartlett, 2011
Input motion
Model Geometry
Model VerificationSunday, August 14, 2011
3:32 PM
Liquefaction Page 295

© Steven F. Bartlett, 2011
Hysteresis loops for site soil with low (5 k Pa) residual strength
Flat top part of loop shows perfectly plastic yielding○
Loading curve is soft○
Reloading curve is stiffer (10 x modulus of loading curve)○
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 296

© Steven F. Bartlett, 2011
Comparison with Kobe Site
Earthquake N-S,Port Island
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0 5 10 15 20 25 30 35 40
Time (sec)
Accele
rati
on
(g
)
16m depth motion
ground surface motion
Note that liquefaction has caused a significant decreases in the surface ground motion
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 297

© Steven F. Bartlett, 2011
FLAC (Version 5.00)
LEGEND
1-Jun-08 20:00
step 987
Dynamic Time 4.1469E+00
-4.446E+00 <x< 8.445E+01
-3.045E+01 <y< 5.845E+01
friction
0.000E+00
8.000E+00
3.500E+01
Grid plot
0 2E 1
-2.500
-1.500
-0.500
0.500
1.500
2.500
3.500
4.500
5.500
(*10^1)
0.500 1.500 2.500 3.500 4.500 5.500 6.500 7.500
(*10^1)
JOB TITLE : .
CIVIL DEPT. UU
UU
FLAC model for Kobe Site
-4
-3
-2
-1
0
1
2
3
4
0 10 20 30 40
Acc
eler
atio
n (m
/s2)
Time (s)
Ground surface motion predicted
Ground surface motion recorded
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 298

© Steven F. Bartlett, 2011
Comparison of surface response spectra for predicted vs. measure motions
Comparison of strain-strain loops at 8 m
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 299

© Steven F. Bartlett, 2011
Comparison of pore pressure generation plot
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 300

© Steven F. Bartlett, 2011
Wildlife site - liquefied sand
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 301

© Steven F. Bartlett, 2011
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
0 10 20 30 40 50
Time (sec)
Ac
ce
lera
tio
n (
g)
Actual Downhole
Actual Surface
FLAC (Version 5.00)
LEGEND
30-May-07 16:20
step 12965
Dynamic Time 3.0001E+01
-2.374E+00 <x< 4.236E+01
-1.231E+01 <y< 3.242E+01
Grid plot
0 1E 1
friction
0.000E+00
8.000E+00
3.500E+01
Grid plot
0 1E 1
-0.750
-0.250
0.250
0.750
1.250
1.750
2.250
2.750
(*10^1)
0.250 0.750 1.250 1.750 2.250 2.750 3.250 3.750
(*10^1)
JOB TITLE : .
CIVIL DEPT. UU
UU
Measured down hole vs. surface acceleration
FLAC model for Wildlife site
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 302

© Steven F. Bartlett, 2011
Predicted vs. measured surface acceleration time histories
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 303

© Steven F. Bartlett, 2011
The difference may due to:The relatively low permeability of the liquefied silty around piezometer.•Pore pressure need to migration to reach the piezometer.•Thus the pore pressure records at the WLA may not indicate when liquefaction (ru = 1) was reached.
•
Possible that this area reached the liquefied state later, on average, than typical liquefied site.
•
FLAC modeling approach does not consider pore pressure migration or redistribution , also it based on average soil properties.
•
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 304

© Steven F. Bartlett, 2011
Stress-Strain loops for Wildlife
Model Verification (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Page 305

© Steven F. Bartlett, 2011
Case history sites used in the calibration process
mean valuei.maximum valueii.minimum valueiii.+1/2 standard deviationiv.–1/2 standard deviationv.+1 standard deviationvi.–1 standard deviationvii.
For each case history without recorded ground motion, 7 synthetic strong motions were selected from 30 synthetic strong motion recorded generated by the SGMSV5 program (Papagorgiou, 2004). These 7 motions were selected at the following according to the spectral acceleration at the fundamental period of the liquefied soil column.
Model CalibrationSunday, August 14, 2011
3:32 PM
Liquefaction Page 306

© Steven F. Bartlett, 2011
Back-calculated values of Sr (residual strength) normalized to the effective
vertical stress v'
Model Calibration ResultsSunday, August 14, 2011
3:32 PM
Liquefaction Page 307

© Steven F. Bartlett, 2011
Note that the data from this study (red diamonds) suggest that the correlation with N160CS (N160 adjusted to a clean sands value) is approximately between the mean value and lower bound value determined by Stark and Mesri (1992).
Regression equation from Meng (2011) to predict the normalized residual strength:
Sr / v' = 0.007639 N160CS + 0.05042 * D50
Correlation with In situ PropertiesSunday, August 14, 2011
3:32 PM
Liquefaction Page 308

© Steven F. Bartlett, 2011
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0 5 10 15 20
(N1)60cs
S r/G
r
Sr = residual shear strengthGr = residual shear modulus
Determining the Residual Shear and Bulk ModulusSunday, August 14, 2011
3:32 PM
Liquefaction Page 309

Step 1 - Determine the required area replacement ratio, Ra, based on the pre-improvement factor of safety against liquefaction, FSpre, and the ratio of the shear modulus of the gravel column to the shear modulus of the matrix soil, RG.
Ra = area of column/area total
RG = GC/GM
RG = shear modulus of column / shear modulus of matrix soil
Note: The shear moduli in this equation are not low strain moduli, Gmax, but should be selected consistent with the strains that develop in the column and matrix soil from the
applied loading.
© Steven F. Bartlett, 2011
Lawton, E. C. (2001). "Soil Improvement and Stabilization: Non-Grouting Techniques." Section 6A in Practical Foundation Engineering Handbook, Edited by R. W. Brown, McGraw-Hill, 2001, pp. 6.1 - 6.340.
Liquefaction RemediationSunday, August 14, 20113:32 PM
Liquefaction Remediation Page 310

© Steven F. Bartlett, 2011
Step 2 - Determine the composite friction angle of the treated soil, C, from the stress concentration ratio, RS, the replacement ratio, Ra, friction angle of the column, C, and the friction angle of the matrix soil, M.
comp = tan -1 [ c Ra tan C + m (1-Ra) tan M]
Rs = 2 to 5 for stone columns○
Rs = 8 for GeopiersTM○
Rs = 10 for lime cement columns○
Approximate values of Rs for preliminary design
C = Rs/[Ra(Rs-1)+1]
m= 1/[Ra(Rs-1)+1]
Ground Improvement (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 311

© Steven F. Bartlett, 2011
Step 3 - Determine the composite shear modulus for the treated soil, Gcomp
Gcomp = (GC * AC + GM*AM)/A
Note: The shear moduli in this equation are not low strain moduli, Gmax, obtained from geophysical tests. The values should be selected consistent with the stresses and strains that
develop in the column and matrix soil from the applied loading.
Estimates of GC and GM can be obtained from the following paper.
78.5/15.7=5 Thus, use GC/GM = 5 for calculations.
Ground Improvement (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 312

© Steven F. Bartlett, 2011
Example
Pre-earthquake configuration of embankment
Post-earthquake configuration of embankment (yellow zone) is liquefied zone.
12345678910
11
meters
0 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 1000
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
400 5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
mete
rs
0
2
4
6
8
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
Ground Improvement (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 313

© Steven F. Bartlett, 2011
Design Spectrum
M
7.50
RRUP (km)
3.54
RJB (km)
0.00
RX (km)
5.00
U
0
FRV
0
FNM
1
FHW
1
ZTOR (km)
0.00
45
VS30 (m/sec)
300
FMeasured
0
Z1.0 (m)
DEFAULT
Z2.5 (km)
DEFAULT
W (km)
20.00
FAS
0
HW Taper
0
Pasted from <file:///C:\Users\sfbartlett\Documents\GeoSlope\NGA_Models_Version2.xls>
Ground Improvement (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 314

© Steven F. Bartlett, 2011
Input Acceleration Time History (Spectrally-matched)
Damp. 5.0%
Period [sec]
3210
Response A
ccele
ratio
n [g]
1.4
1.3
1.2
1.1
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
Response spectrum from above acceleration time history. Spectrally matched to plus or minus 10 percent of the target spectrum.
Peak ground acceleration (pga) = 0.6 g
This was put into base of DEEPSOIL Model
Ground Improvement (cont.)Sunday, August 14, 20113:32 PM
Liquefaction Remediation Page 315

© Steven F. Bartlett, 2011
Determining site-specific response
Embankment and shallow soil properties
g (kN/m3)
r (kg/m3)
γ(lb/ft3)
E (kPa) v K (kPa) G (kPa) φ c (kPa)
Soil 1 15.72 1603 100 100000 0.37 128,205 36,496 24.37 0
Soil 2 16.51 1683 105 100000 0.37 128,205 36,496 24.37 0
Soil 3 17.29 1763 110 150000 0.35 166,667 55,556 27.49 0
Soil 4 18.08 1843 115 200000 0.3 166,667 76,923 34.85 0
Soil 5 18.08 1843 115 250000 0.3 208,333 96,154 34.85 0
Embankment 21.22 2163 135 500000 0.3 416,667 192,308 34.85 25
Pasted from <file:///C:\Users\sfbartlett\Documents\GeoSlope\miscdynamic1.xls>
Soil Properties for 1D Deep Soil Analysis
Ground ImprovementSunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 316

© Steven F. Bartlett, 2011
Determining site-specific response (cont.)
Acceleration time history in layer 5 from DeepSoil
Black= base motionBlue = surface motionOrange = motion in layer 5 (i.e., base of FLAC model)
Ground ImprovementSunday, August 14, 20113:32 PM
Liquefaction Remediation Page 317

© Steven F. Bartlett, 2011
Calculate the pre-improvement factor of safety against liquefaction. This was done using Quake/W.
Liquefied zone is between z = 6 and 7 m (i.e., 2-4 m below ground surface)○
N160 value = 12○
Fines content < 5 percent○
Watertable 2 m below ground surface at toe of slope○
Soil Properties
Input motion at base of Quake/W model for liquefaction calculations
Ground Improvement, Sample CalculationSunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 318

© Steven F. Bartlett, 2011
Number of cycle to cause liquefaction versus shear stress ratio
Chart for N160 = 12Clean sand
Ground Improvement, Sample Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 319

© Steven F. Bartlett, 2011
Ks correction
Ka correction
Ground Improvement, Sample Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 320

© Steven F. Bartlett, 2011
For = 1
Ground Improvement, Sample Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 321

© Steven F. Bartlett, 2011
Cyclic stress ratio (CSRE) from QUAKE/W
Maximum shear strain without liquefaction from QUAKE/w
-0.01 0.01
0.02
0.03 0.03
0.15
0.2 0.25
0.3 0.35
0.4
0.4
5
CRSE = 0.25 in critical zone
Ground Improvement, Sample Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 322

© Steven F. Bartlett, 2011
Calculations
FS pre = CSRL / CSRE = 0.12 / 0.25 ≈ 0.5
CSRL = 0.12 (clean sand from chart below)
Ground Improvement, Sample Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 323

© Steven F. Bartlett, 2011
Ra = 0.25 (chart) for FS = 0.5RG = 5 (previous)Rs = 5 (Stone columns)
C = 37 deg
M = 25 deg
C = Rs/[Ra(Rs-1)+1] = 5/[0.25(5-1)+1] = 2.5
m= 1/[Ra(Rs-1)+1] = 1/[0.25(5-1)+1] = 0.5
comp = tan -1 [c Ra tan C + m (1-Ra) tan M]
comp = tan -1 [2.5*0.25 tan 37 + 0.5 (1-0.25) tan 25]
comp = 33 deg
Gcomp = (GC * AC + GM*AM)/AGcomp = (78.5 *0.25 + 15.7 * 0.75)/1Gcomp = 31.4 MPa
Ground Improvement, Sample Calculation (cont.)Sunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 324

© Steven F. Bartlett, 2011
toe
crest
front
Ground ImprovementSunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 325

© Steven F. Bartlett, 2011
BlankSunday, August 14, 2011
3:32 PM
Liquefaction Remediation Page 326

© Steven F. Bartlett, 2011
Spectral Matching
Spectral Matching creates high-quality design ground motion time histories by taking actual earthquake accelerograms and adjusting them to match a target response spectrum. These time histories are used by structural engineers in non-linear analyses of the dynamic response of buildings and soil structures to earthquake ground shaking.The ground motion time histories used in analyses need to accurately reflect a design level of safety and have realistic time-dependent characteristics.
Pasted from <http://www.ez-frisk.com/Tech/SpectralMatching/Spectral.html>
Pasted from <http://www.stanford.edu/~bakerjw/research/spectral_matching.html>
Spectral MatchingSunday, August 14, 20113:32 PM
Spectral Matching Page 327

http://www.seismosoft.com/en/SeismoMatch.aspx
Program is available at:
Simultaneous matching of a number of accelerograms, and then creation of a mean matched spectrum whose maximum misfit respects a pre-defined tolerance
•
Possibility of using this software in combination with records selection tools and records appropriateness verification algorithms to define adequate suites of records for nonlinear dynamic analysis of new or existing structures
•
Capability of reading single accelerograms defined in both single- or multiple-values per line formats (the two most popular formats used by strong-motion databases) or of reading a number of accelerograms at the same time (if they are defined in the single-value per line format)
•
Creation of the target spectrum by following Eurocode 8 rules, by computing the spectrum of a specific accelerogram or by simply loading a user-defined spectrum
•
SeismoMatch is an application capable of adjusting earthquake accelerograms to match a specific target response spectrum, using the wavelets algorithm proposed by Abrahamson [1992] and Hancock et al. [2006]. Some of its features are:
Elastic response spectra and pseudo-spectra •Overdamped and constant-ductility inelastic response spectra •Root-mean-square (RMS) of acceleration, velocity and displacement •Arias (Ia) and characteristic (Ic) intensities •Cumulative absolute velocity (CAV) and specific energy density (SED) •Acceleration (ASI) and velocity (VSI) spectrum intensity •Housner intensity •Sustained maximum acceleration (SMA) and velocity (SMV) •Effective design acceleration (EDA) •Predominant (Tp) •Significant duration•
The following strong-motion parameters are then computed for the matched accelerograms:
Pasted from <http://www.seismosoft.com/en/SeismoMatch.aspx>
Spectral Matching using SeisomatchSunday, August 14, 2011
3:32 PM
Spectral Matching Page 328

© Steven F. Bartlett, 2011
Spectral Matching Page 329

Recommendations on selection of candidate time histories for spectral matching
The candidate time histories for the analyses should come from earthquakes that have earthquake magnitude and source-to-site distance that are approximately the same as the controlling earthquake magnitude and source distance associated with the proposed site.
1.
The candidate time histories should be selected from the National Geophysical Data Center (NGDC), U.S.G.S., PEER and California Strong Ground Motion Instrumentation Program, or other appropriate strong motion databases. We found that the PEER web site was particularly useful because its records had been already pre-processed for engineering evaluations.
2.
The earthquake magnitude, M, of candidate time histories be within + 0.5 M of the controlling fault magnitude for the proposed site. For example, a site with a controlling earthquake magnitude of 7.0 should have candidate time histories selected from earthquakes with M between 6.5 and 7.5.
3.
a. R < 15 kmb. 15 < R < 30 kmc. 30 < R < 50 kmd. R > 50 km
In addition to earthquake magnitude, it is important that the candidate time histories have the appropriate source-to-site distance. This criterion is often difficult to meet for moderate to large earthquake that are close to the seismic source because there is only a handful of appropriate records. To aid in determining the appropriate distance for the candidate time history, we propose dividing the source-to-site distance into the following four categories:
4.
We recommend that the candidate time histories be selected for the appropriate M and from events that fall within the same source-distance category. For example, if the controlling source distance for the design event is 20 km, then candidate time histories should be selected from source distances that fall between 15 and 30 km,
Spectral MatchingSunday, August 14, 2011
3:32 PM
Spectral Matching Page 330

© Steven F. Bartlett, 2011
Whenever possible, we recommend the selection of candidate time histories from the appropriate tectonic regimes. For Utah, the tectonic regime is extensional.
5.
Whenever possible, we recommend that the candidate time histories have peak ground acceleration (PGA), peak ground velocity (PGV) and peak ground displacement (PGD) with minus 25 percent and plus 50 percent of the target spectral values (CALTRANS 1996a). This will allow the spectral matching process to be completed with less difficulty. In addition, the spectral matching process will not introduce as large of change in the spectral content of the matched time history.
6.
We recommend the selection of at least 3 and as many as 7 time histories for the ground response analyses. The number of time histories to be used in nonlinear dynamic analyses should take in account the dependence of the response on the time domain characteristics of the time history (e.g., duration, pulse shape, pulse sequencing) and its spectral response content. ASCE 4-98 recommends that at least 3 independent time histories be used for non-linear analyses.
7.
Spectral MatchingSunday, August 14, 2011
3:32 PM
Spectral Matching Page 331

© Steven F. Bartlett, 2011
Kobe.d
2423222120191817161514131211109876543210
Accele
ratio
n (
g)
0.3
0.25
0.2
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
-0.25
Unmatched Kobe Record (candidate record for spectral matching)
Target Spectrum
Kobe.d
Period (sec)
3210
Accele
ratio
n (
g)
1.15
1.1
1.05
1
0.95
0.9
0.85
0.8
0.75
0.7
0.65
0.6
0.55
0.5
0.45
0.4
0.35
0.3
0.25
0.2
0.15
0.1
0.05
Acceleration Response Spectrum (Kobe Record - 5 percent damped)
Note that this is acceleration time history is one that has been provided by Seismomatch in its default folder. We will use it as a candidate time history for this example, even though it may not be strictly applicable for a real site and a real design case.
Spectral Matching in SeismomatchSunday, August 14, 2011
3:32 PM
Spectral Matching Page 332

© Steven F. Bartlett, 2011
0
0.2
0.4
0.6
0.8
1
1.2
1.4
0 1 2 3 4 5 6
Design - Target
This represents the design spectrum at the surface for a given site. This design spectrum is referred to as the target spectrum and it is often determined using methodologies such as:
Code-based design procedures such as ASCE 7-051.Attenuation relations2.Probabilistic seismic hazard analyses (PHSA)3.
T (s) SA (g)
0 0.590.01 0.5950.02 0.6050.03 0.6420.05 0.7310.075 0.8570.1 1.0010.15 1.150.2 1.2190.25 1.2440.3 1.2490.4 1.2220.5 1.2120.75 1.091 0.9751.5 0.7682 0.6223 0.434 0.3245 0.269
Spectral MatchingSunday, August 14, 2011
3:32 PM
Spectral Matching Page 333

© Steven F. Bartlett, 2011
Importing the target spectrum within Seismomatch using the Load Spectrum from file option. This is target spectrum is the same as the design spectrum given previously.
Target Spectrum
Kobe.d
Period (sec)
3210
Accele
ratio
n (
g)
1.2
1.1
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
Comparison of the Kobe response spectrum with the target spectrum. Note that the Kobe record is has lower amplitudes for all periods. The goal of spectral matching is to increase the amplitude of this record so it more closely matches the target spectrum.
Spectral MatchingSunday, August 14, 2011
3:32 PM
Spectral Matching Page 334

Results from the spectral matching.
Original acceleration values
Matched acceleration values
Time
242322212019181716151413121110987654321
Accele
ratio
n (
g) 0.4
0.2
0
-0.2
-0.4
Original acceleration values
Matched acceleration values
Time
242322212019181716151413121110987654321
Velo
city
(cm
/sec) 100
50
0
-50
Original acceleration values
Matched acceleration values
Time
242322212019181716151413121110987654321
Dis
pla
cem
ent (c
m)
30
20
10
0
-10
-20
Spectral MatchingSunday, August 14, 2011
3:32 PM
Spectral Matching Page 335