current programmed control (i.e. peak current-mode control) lecture slides...
TRANSCRIPT
1ECEN5807 CPM
Current Programmed Control(i.e. Peak Current-Mode Control)
Lecture slides part 2More Accurate Models
ECEN 5807 Dragan Maksimović

2ECEN5807 CPM
Simple First-Order CPM Model: Summary
• Assumption: CPM controller operates ideally, ⟨iL⟩ = ic• Useful results at low frequencies, well suited for conservative
(relatively low bandwidth) design of voltage feedback loop around CPM controlled converter
• Limitations:– The simple model does not indicate possible instability of the current
controller, or the need for a compensation (“artificial”) ramp– Does not include high-frequency dynamics, which is relevant for wide-
bandwidth voltage loop designs– Does not correctly model line-to-output responses in CPM buck or
buck-derived converters even at low frequencies (it incorrectly predicts complete rejection of line disturbances)

3ECEN5807 CPM
More Accurate CPM Models: Outline
• Sampled-data modeling of inductor dynamics in current programmed mode
– Instability of the current loop and the need for compensation (“artificial”) ramp
– Improved modeling of high-frequency dynamics to enable design of wide-bandwidth voltage loops
• More accurate averaged model– Large-signal and small-signal averaged modulator model– Accurate averaged small-signal models, including high-frequency
dynamics– Accurate modeling of line-to-output responses
• Discussion of results for basic converters• CPM model for simulations• Design examples
4ECEN5807 CPM

5ECEN5807 CPM

6ECEN5807 CPM
Inductor current in transient
d[n]Ts d’[n]Ts d’[n+1]Tsd[n+1]Ts
ic[n]ic[n+1]
iL(t)
m1(t)−m2(t)

7ECEN5807 CPM
High-frequency small-signal inductor-current dynamics
• Assume that voltage perturbations are negligibly small at high frequencies: the slopes m1 and m2 can be considered constant
• Apply sampled-data modeling:
)(ˆ][ˆ][ˆˆ)(ˆ * tininiiti LLccc →→→→
)(ˆ)(ˆ)(ˆ)(ˆ1)(ˆ sizizijksiT
si LLck
scs
c →→→−→ ∑+∞
−∞=
ω

8ECEN5807 CPM
Small-signal perturbation
ic[n]
m1(t)−m2(t)
ic + ic
iL[n]
d[n]TsiL[n-1]

9ECEN5807 CPM
Discrete-time dynamics ][ˆ][ˆ nini Lc →
sLL Tndmmnini ][ˆ)(]1[ˆ][ˆ21 ++−=
sLc Tndmnini ][ˆ]1[ˆ][ˆ1+−=

10ECEN5807 CPM
Discrete-time dynamics ][ˆ][ˆ nini Lc →
sLL Tndmmnini ][ˆ)(]1[ˆ][ˆ21 ++−=
sLc Tndmnini ][ˆ]1[ˆ][ˆ1+−=
][ˆ)1(]1[ˆ ][ˆ]1[ˆ][ˆ1
21
1
2 nininimmmni
mmni cLcLL αα −+−=
++−−=
'
1
2
1
2
DD
MM
mm
−=−=−=α

11ECEN5807 CPM
Instability for D > 0.5
][ˆ)1(]1[ˆ ][ˆ ninini cLL αα −+−=
'
1
2
1
2
DD
MM
mm
−=−=−=α

12ECEN5807 CPM
13ECEN5807 CPM

14ECEN5807 CPM

15ECEN5807 CPM
Small-signal perturbation with compensation ramp
ic[n]
m1(t) −m2(t)
ic + ic
iL[n]
d[n]TsiL[n-1]
−ma(t)

16ECEN5807 CPM
Discrete-time dynamics with compensation ramp: ][ˆ][ˆ nini Lc →
sLL Tndmmnini ][ˆ)(]1[ˆ][ˆ21 ++−=
saLc Tndmmnini ][ˆ)(]1[ˆ][ˆ1 ++−=

17ECEN5807 CPM
sLL Tndmmnini ][ˆ)(]1[ˆ][ˆ21 ++−=
][ˆ)1(]1[ˆ ][ˆ]1[ˆ][ˆ1
21
1
2 nininimmmmni
mmmmni cLc
aL
a
aL αα −+−=
++
+−+−
−=
2
2
1
2
'
1
mm
DD
mm
mmmm
a
a
a
a
+
−−=
+−
−=α
Discrete-time dynamics with compensation ramp: ][ˆ][ˆ nini Lc →
saLc Tndmmnini ][ˆ)(]1[ˆ][ˆ1 ++−=

18ECEN5807 CPM
][ˆ)1(]1[ˆ ][ˆ ninini cLL αα −+−=

19ECEN5807 CPM

20ECEN5807 CPM

21ECEN5807 CPM
][ˆ)1(]1[ˆ ][ˆ ninini cLL αα −+−=
Discrete-time dynamics: )(ˆ)(ˆ zizi Lc →
Z-transform: )(ˆ)1()(ˆ )(ˆ 1 zizzizi cLL αα −+= −
1 11
)(ˆ)(ˆ
−−−
=zzi
zi
c
L
ααDiscrete-time (z-domain) control-to-
inductor current transfer function:
ss TjsT ee ωαα
αα
−− −−
→−
− 1
11
1
Difference equation:
• Pole at z = α • Stability condition: pole inside the unit circle, |α| < 1• Frequency response (note that z−1 corresponds to a delay of Ts in
time domain):

22ECEN5807 CPM
Equivalent hold:
ic[n]
m1(t) −m2(t)
ic + ic
iL[n]
d[n]TsiL[n-1]
−ma(t)
)(ˆ)(ˆ ),(ˆ][ˆ sizitini LLLL →→
iL(t) iL[n]
Ts

23ECEN5807 CPM
Equivalent hold
• The response from the samples iL[n] of the inductor current to the inductor current perturbation iL(t) is a pulse of amplitude iL[n] and length Ts
• Hence, in frequency domain, the equivalent hold has the transfer function previously derived for the zero-order hold:
se ssT−−1
24ECEN5807 CPM
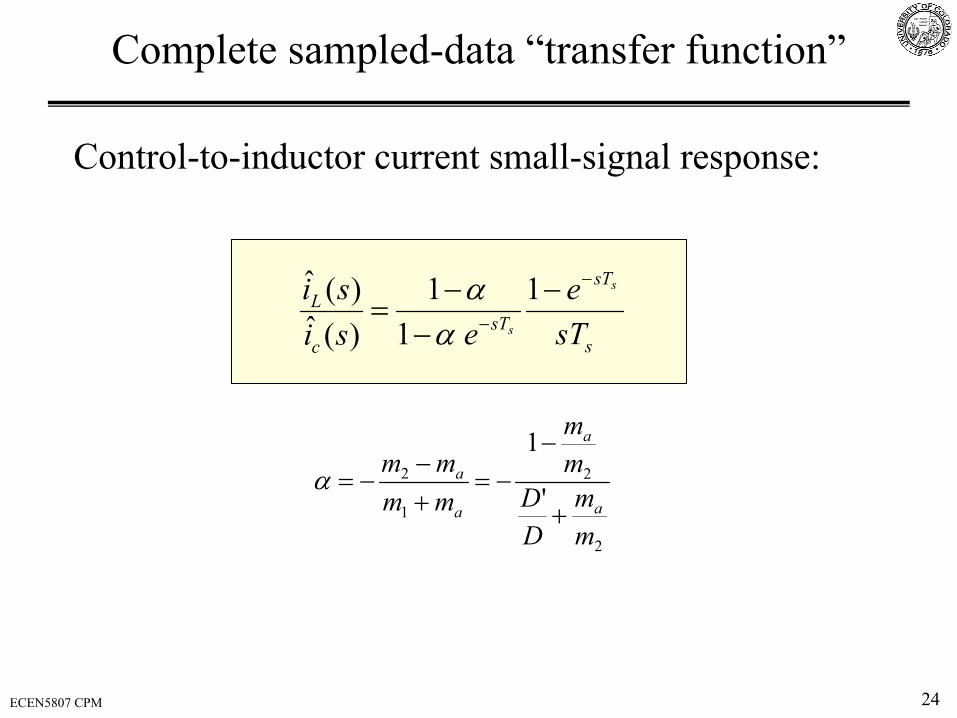
Complete sampled-data “transfer function”
s
sT
sTc
L
sTe
esisi s
s
−
−
−−
−=
1 1
1)(ˆ)(ˆ
αα
2
2
1
2
'
1
mm
DD
mm
mmmm
a
a
a
a
+
−−=
+−
−=α
Control-to-inductor current small-signal response:

25ECEN5807 CPM
Example
• CPM buck converter:Vg = 10V, L = 5 µH, C = 75 µF, D = 0.5, V = 5 V, I = 20 A, R = V/I = 0.25 Ω, fs = 100 kHz
• Inductor current slopes:m1 = (Vg – V)/L = 1 A/µsm2 = V/L = 1 A/µs
2
2
2
2
1
2
1
1
'
1
mmmm
mm
DD
mm
mmmm
a
a
a
a
a
a
+
−−=
+
−−=
+−
−=α
D = 0.5: CPM controller is stable for any compensation ramp, ma/m2 > 0
s
sT
sTc
L
sTe
esisi s
s
−
−
−−
−=
1 1
1)(ˆ)(ˆ
αα

26ECEN5807 CPM
Control-to-inductor current responses for several compensation ramps (ma/m2 is a parameter)
102 103 104 105-40
-30
-20
-10
0
10
20m
agni
tude
[db]
iL/ic magnitude and phase responses
102 103 104 105
-150
-100
-50
0
frequency [Hz]
phas
e [d
eg]
ma/m2=0.1
ma/m2=0.5
ma/m2=1
ma/m2=5
5
10.5
0.1
MATLAB file: CPMfr.m

27ECEN5807 CPM
First-order approximation
hfs
s
sT
sTc
L
sssTe
esisi s
s
ωπωααα
α
+=
−+
+≈
−−
−=
−
−
1
1
)/(111
11 1
1)(ˆ)(ˆ
)/(1
)/(1
πω
πω
s
ssT
s
s
e s
+
−≈−
ππαα s
a
shf
f
mmDD
ff
2
221
111
+−=
+−
=
Control-to-inductor current response behaves approximately as a single-pole transfer function with a high-frequency pole at

28ECEN5807 CPM
Control-to-inductor current responses for several compensation ramps (ma/m2 = 0.1, 0.5, 1, 5)
102 103 104 105-40
-30
-20
-10
0
10
20m
agni
tude
[db]
iL/ic magnitude and phase responses
102 103 104 105
-150
-100
-50
0
frequency [Hz]
phas
e [d
eg]
1st-order transfer-function approximation

29ECEN5807 CPM
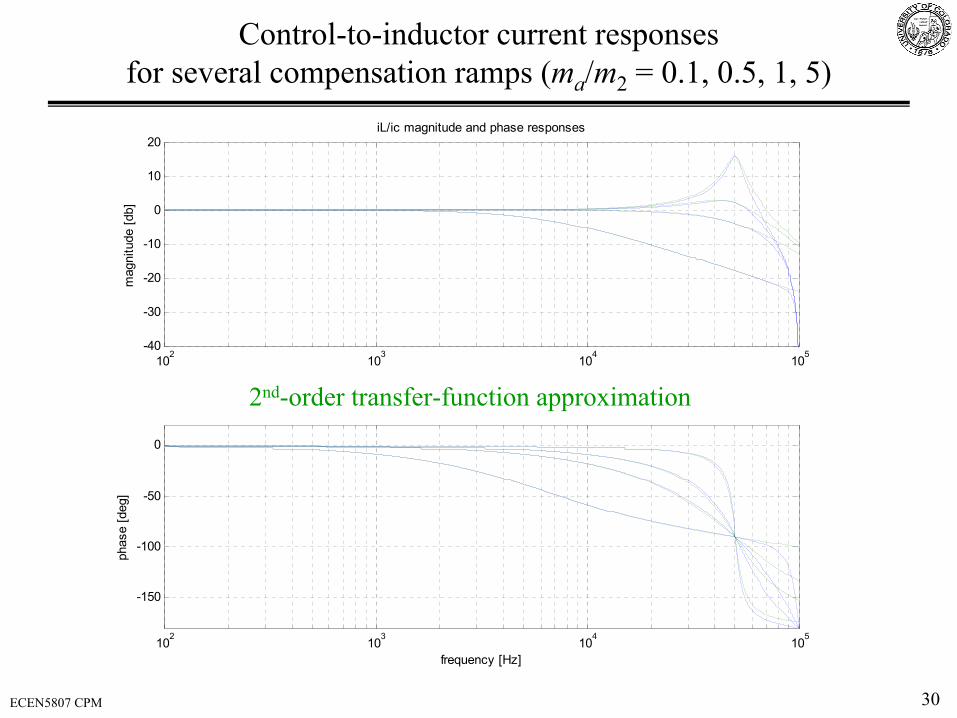
Second-order approximation
2
2/)2/(11
21
11 1
1)(ˆ)(ˆ
+
−+
+
≈−
−−
=−
−
ss
s
sT
sTc
L
sssTe
esisi s
s
ωωααπα
α
2
2
2/)2/(21
2/)2/(21
++
+−
≈−
ss
sssT
ss
ss
e s
ωωπ
ωωπ
2
221
12112
mmDD
Qa+−
=+−
=πα
απ
Control-to-inductor current response behaves approximately as a second-order transfer function with corner frequency fs/2 and Q-factor given by
30ECEN5807 CPM
102 103 104 105-40
-30
-20
-10
0
10
20m
agni
tude
[db]
iL/ic magnitude and phase responses
102 103 104 105
-150
-100
-50
0
frequency [Hz]
phas
e [d
eg]
Control-to-inductor current responses for several compensation ramps (ma/m2 = 0.1, 0.5, 1, 5)
2nd-order transfer-function approximation
31ECEN5807 CPM
Conclusions
• In CPM converters, high-frequency inductor dynamics depend strongly on the compensation (“artificial”) ramp slope ma
• Without compensation ramp (ma = 0), CPM controller is unstable for D > 0.5, resulting in period-doubling or other sub-harmonic (or even chaotic) oscillations
• For ma = 0.5m2, CPM controller is stable for all D• Relatively large compensation ramp (ma > 0.5m2) is a practical choice not just
to ensure stability of the CPM controller, but also to reduce sensitivity to noise
• For relatively large values of ma, high-frequency inductor current dynamics can be well approximated by a single high-frequency pole
• Second-order approximation is very accurate for any ma• Next: more accurate averaged model, including high-frequency dynamics