curs i - math.uaic.rooanacon/ge/fisiere/cursuri/rezumat01.pdf · curs i spatii a ne euclidiene....
TRANSCRIPT
Functia distanta pe un spatiu a�n euclidianSubspatii a�ne euclidiene perpendiculare
Curs I
Spatii a�ne euclidiene. Functia distanta. Subspatii normale.
Oana Constantinescu
Universitatea �Al. I. Cuza� Iasi
Oana Constantinescu Curs I
Functia distanta pe un spatiu a�n euclidianSubspatii a�ne euclidiene perpendiculare
Table of Contents
1 Functia distanta pe un spatiu a�n euclidian
2 Subspatii a�ne euclidiene perpendiculare
Oana Constantinescu Curs I
Pe parcursul acestui curs vom lucra cu un spatiu a�n real, de aceea
consideram utila reamintirea de�nitiei acestuia.
De�nition
Un spatiu a�n real este un triplet A =(X ,−→X ,Φ
)format din:
- o multime nevida X, ale carei elemente le numim puncte,
- un spatiu liniar real−→X , numit spatiul liniar director al spatiului
a�n A,- o functie Φ : X × X →
−→X , numita structura a�na, cu
proprietatile:
(1) ∃O ∈ X astfel incat functia ΦO : X →−→X ,
ΦO(A) = Φ(O,A), ∀A ∈ X , este o bijectie;
(2) Φ(A,B) + Φ(B,C ) = Φ(A,C ), ∀A,B,C ∈ X .
Reamintim notatia Φ(A,B) =−→AB. Se poate demonstra ca
proprietatea (1) are loc pentru orice punct O din X .
Datorita proprietatii (1) a de�nitiei anterioare, structura de spatiu
liniar a lui−→X se poate transfera asupra lui X , odata ce am �xat un
punct O ∈ X . Astfel, se de�nesc operatiile de adunare a punctelor
si de inmultire a punctelor cu scalari reali, iar X inzestrat cu aceste
operatii poarta numele de spatiul liniar tangent la X in O (notat
TOX ). Pentru ca operatiile precedente sa nu depinda de alegerea
lui O, se lucreaza cu combinatii a�ne de puncte:
λ1A1 +λ2A2 + · · ·+λpAp,
p∑i=1
λiAi = 1., λi ∈ R, Ai ∈ X , i ∈ 1, p.
De�nitia spatiului a�n euclidian
De�nition
Spatiul a�n real A = (X ,−→X ,Φ) se numeste euclidian daca spatiul
sau liniar director este spatiu liniar euclidian, adica este inzestrat cu
produs scalar,
<,>:−→X ×
−→X → R,
o forma biliniara, simetrica, cu forma patratica asociata pozitiv
de�nita.
< u, w >=< w , u >, ∀u, w ∈−→X ,
< αu + γv , w >= α < u, w > +γ < v , w >, ∀u, v , w ∈−→X , ∀α, γ ∈ R,
< w , αu + γv >= α < w , u > +γ < w , v >, ∀u, v , w ∈−→X , ∀α, γ ∈ R,
< u, u >≥ 0, ∀u ∈−→X , < u, u >= 0⇔ u = 0
.
Exemple de spatii a�ne euclidiene
Example
(a) Spatiul a�n geometric (S,V,Φ), cu S multimea punctelor
spatiului geometric (punctele sunt notiuni primare si geometria lui
S se construieste axiomatic), V spatiul liniar al vectorilor liberi si
<,>: V × V → R produsul scalar a doi vectori liberi, de�nit prin
< u, v >=
{0,
(u = 0
)∨(v = 0
),
| u || v | cos(u, v),(u 6= 0
)∧ (v 6= 0).
(b) (Rn,Rn,Φ), Φ(u, v) = v − u, ∀u, v ∈ Rn,
< u, v >=∑n
i=1uiv i , u = (u1, u2, · · · , un), v = (v1, v2, · · · , vn)
este un spatiu a�n euclidian.
Un alt exemplu important e cel ce permite de�nirea subspatiului
a�n euclidian:
Example
Fie E =(E ,−→E ,Φ
)un spatiu a�n euclidian si E ′ ⊂ E un subspatiu
a�n al sau. Atunci restrictia aplicatiei <,> la−→E ′ este un produs
scalar pe−→E ′, <,>|
−→E ′×−→E ′ :−→E ′ ×
−→E ′ → R si deci
E ′ = (E ′,−→E ′,Φ|E ′×E ′) devine spatiu a�n euclidian. Spunem ca E ′
este subspatiu a�n euclidian al lui E si notam E ′ ⊂s.a.eE sau mai
simplu E ′ ⊂s.a.e
E .
Example
Fie E1 =(E1,−→E1,Φ1
)si E2 =
(E2,−→E2,Φ2
)doua spatii a�ne
euclidiene, cu <,>1:−→E1 ×
−→E1 → R si <,>2:
−→E2 ×
−→E2 → R
produsele scalare respective. Consideram spatiul a�n produs
E1 × E2 =(E1 × E2,
−→E1 ×
−→E2,Φ1 × Φ2
), cu
(Φ1 × Φ2) ((A1,A2), (B1,B2)) = (Φ1(A1,B1),Φ2(A2,B2)) si
de�nim aplicatia
<,>:(−→E1 ×
−→E2
)×(−→E1 ×
−→E2
)→ R,
< (u1, u2), (v1, v2) >=< u1, v1 >1 + < u2, v2 >2 .
Demonstrati ca <,> este un produs scalar pe−→E1 ×
−→E2 , deci
E1 × E2 devine spatiu a�n euclidian.
Proprietatile normei
Amintim ca produsul scalar pe−→E induce o norma, de�nita prin
‖ · ‖:−→E → R, ‖ u ‖=
√< u, u >, ∀u ∈
−→E
si aceasta are urmatoarele proprietati:
(1) ‖ u ‖≥ 0, ∀u ∈−→E , ‖ u ‖= 0⇔ u = 0;
(2) ‖ λu ‖=| λ |‖ u ‖, ∀λ ∈ R, ∀u ∈−→E ;
(3) (Cauchy) |< u, v >|≤‖ u ‖‖ v ‖, ∀u, v ∈−→E ;
Egalitatea are loc daca si numai daca vectorii u, v sunt coliniari
(liniar dependenti);
(4)(Minkowski) ‖ u + v ‖≤‖ u ‖ + ‖ v ‖, ∀u, v ∈−→E .
Egalitatea are loc daca si numai daca u, v sunt coliniari si de
acelasi sens (∃λ ≥ 0 astfel incat u = λv sau v = λu ).
Functia distanta pe E
De�nition
Fie E =(E ,−→E ,Φ
)un spatiu a�n euclidian. De�nim aplicatia
d : E × E → R, d(A,B) =‖−→AB ‖, ∀A,B ∈ E
si o numim functia distanta pe E .
Putem demonstra ca d este intr-adevar o functie distanta:
Proposition
(E , d) este un spatiu metric, adica
(1) d(A,B) ≥ 0∀A,B ∈ E ; d(A,B) = 0⇔ A = B ;
(2) d(A,B) = d(B,A);(3) d(A,B) ≤ d(A,C ) + d(C ,B), ∀A,B,C ∈ E ; egalitatea are loc
daca si numai daca ∃α ∈ [0, 1] astfel incat C = αA + (1− α)B .
Functia distanta pe E
De�nition
Fie E =(E ,−→E ,Φ
)un spatiu a�n euclidian. De�nim aplicatia
d : E × E → R, d(A,B) =‖−→AB ‖, ∀A,B ∈ E
si o numim functia distanta pe E .
Putem demonstra ca d este intr-adevar o functie distanta:
Proposition
(E , d) este un spatiu metric, adica
(1) d(A,B) ≥ 0∀A,B ∈ E ; d(A,B) = 0⇔ A = B ;
(2) d(A,B) = d(B,A);(3) d(A,B) ≤ d(A,C ) + d(C ,B), ∀A,B,C ∈ E ; egalitatea are loc
daca si numai daca ∃α ∈ [0, 1] astfel incat C = αA + (1− α)B .
Teorema lui Pitagora
De�nition Daca C = αA + (1− α)B cu α ∈ (0, 1), ⇔d(A,B) = d(A,C ) + d(C ,B) si C 6= A, C 6= B , spunem ca
punctul C este situat intre A si B si notam A− C − B .
De�nim segmentul deschis (AB) = {C ∈ E | A− C − B}.Introducem acum o generalizare a binecunoscutei teoreme a lui
Pitagora:
Theorem
Fie E =(E ,−→E ,Φ
)un spatiu a�n euclidian si A,B,C ∈ E . Atunci
<−→AB,−→AC >= 0 daca si numai daca
d(A,B)2 + d(A,C )2 = d(B,C )2.
De�nition
Un reper cartezian R = {O; e1, · · · , en} in spatiul a�n euclidian
En =(E ,−→E ,Φ
)de dimensiune n este un reper ortonormat daca
baza reperului este ortonormata in(−→E , <,>
). Un reper a�n
R′ = {A0,A1, · · · ,An} este ortonormat daca reperul cartezian
asociat acestuia{A0;−−−→A0A1, · · · ,
−−−→A0An
}este ortonormat.
Consideram cunoscute coordonatele a doua puncte in raport cu un
reper cartezian ortonormat �xat in En =(E ,−→E ,Φ
): A(x1, · · · , xn)
si B(y1, · · · , yn). Atunci
d(A,B) =
√√√√ n∑i=1
(yi − xi )2.
Proposition
Daca R1 = {O1; e1, · · · , en} si R2 ={O2; f1, · · · , fn
}sunt doua
repere ortonormate in En, atunci formula schimbarii de repere
R1 → R2 se scrie matricial
X = SX ′ + S0, S ∈ O(n)
unde X e matricea coloana a coordonatelor unui punct arbitrar
P ∈ E in raport cu R1, X′ e matricea coloana a coordonatelor
aceluiasi punct P in raport cu R2, S ∈ O(n) este matricea de
trecere de la baza primului reper la baza celui de-al doilea reper si
S0 este matricea coloana a coordonatelor lui O2 in raport cu R1.
Reamintim ca O(n) este grupul ortogonal real de ordin n si
A ∈ O(n)⇔ AAt = AtA = In.
Subspatii a�ne euclidiene perpendiculare
De�nition
Fie En =(E ,−→E ,Φ
)un spatiu a�n euclidian de dimensiune �nita si
doua subspatii a�ne euclidiene ale sale E1,E2 ⊂s.a.e.
E . Spunem ca
E1 este perpendicular pe E2 daca−→E1 ⊥
−→E2, adica ∀u ∈
−→E1 si
∀v ∈−→E2 are loc < u, v >= 0.
Daca−→E1 =
(−→E2
)⊥⇔−→E2 =
(−→E1
)⊥, cele doua subspatii se numesc
normale. Am notat cu(−→E2
)⊥suplementul ortogonal al lui
−→E2 in
−→E . In acest caz spunem ca E1 are directia normala
−→E2 si E2 are
directia normala−→E1.
Observatii:
(0) In ambele situatii de mai sus notam E1 ⊥ E2.(1) Relatia de perpendicularitate pe multimea subspatiilor a�ne euclidieneale unui spatiu a�n euclidian �nit dimensional este simetrica.
Exemple in E3
(2) Evident subspatiile E1,E2 sunt perpendiculare daca si numai
daca−→E1 ⊆
(−→E2)⊥
sau(−→E1)⊥⊆−→E2.
Subliniem ca incluziunile anterioare pot � stricte.
De exemplu, daca d1 si d2 sunt doua drepte a�ne intr-un spatiu
a�n euclidian de dimensiune 3, atunci
d1 ⊥ d2 ⇔−→d2 (
(−→d1)⊥⇔−→d1 (
(−→d2)⊥
. Mai mult, d1 = A1 + [a1]
si d2 = A2 + [a2] sunt perpendiculare ⇔ a1 ⊥ a2 ⇔< a1, a2 >= 0.
Analog, daca π1, π2 sunt doua plane a�ne intr-un spatiu euclidian
a�n 3 - dimensional, atunci π1 ⊥ π2 ⇔(−→π1)⊥ ( −→π2 ⇔ (−→π2)
⊥ ( −→π1 .
Daca (−→π1)⊥
= [−→N1], (−→π2)
⊥= [−→N2], atunci π1 ⊥ π2 ⇔
−→N1 ⊥
−→N2.
Functia distanta pe un spatiu a�n euclidianSubspatii a�ne euclidiene perpendiculare
(3) Doua subspatii a�ne E1 si E2 sunt normale ⇔−→E1 =
(−→E2
)⊥⇔−→E2 =
(−→E1
)⊥⇔ dim E1 + dimE2 = n.
De exemplu o dreapta a�na d este normala unui plan a�n πintr-un spatiu a�n euclidian 3 - dimensional daca si numai daca−→d = (−→π )
⊥ ⇔ −→π =(−→d)⊥
.
Daca d = A +−→d ,−→d = [a] si π = B +−→π , cu (−→π )
⊥= [−→N ], atunci
d este normala lui π ⇔ −→a = λ−→N , λ ∈ R∗.
Evident orice subspatii normale sunt perpendiculare.
Oana Constantinescu Curs I
Proposition
Fie En =(E ,−→E ,Φ
)un spatiu a�n euclidian, punctul A ∈ E si
E1 ⊆s.a.e.
E . Atunci exista un unic subspatiu a�n euclidian E2 ⊆s.a.e.
E
ce trece prin A si e normal la E1.
Evident E2 = A +(−→E1
)⊥.
De�nition
Acest subspatiu a�n euclidian unic determinat se numeste
subspatiul a�n normal prin A la E1.
Daca E1 este un hiperplan al lui E , atunci E2 este o dreapta a�na,
numita normala prin A la E1.
Proposition
Fie En =(E ,−→E ,Φ
)un spatiu a�n euclidian, punctul A ∈ E si
E1 ⊆s.a.e.
E . Atunci exista un unic subspatiu a�n euclidian E2 ⊆s.a.e.
E
ce trece prin A si e normal la E1.
Evident E2 = A +(−→E1
)⊥.
De�nition
Acest subspatiu a�n euclidian unic determinat se numeste
subspatiul a�n normal prin A la E1.
Daca E1 este un hiperplan al lui E , atunci E2 este o dreapta a�na,
numita normala prin A la E1.
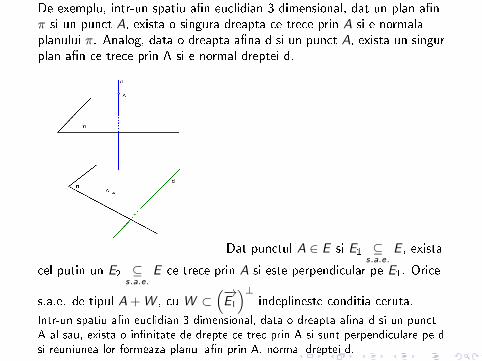
De exemplu, intr-un spatiu a�n euclidian 3 dimensional, dat un plan a�nπ si un punct A, exista o singura dreapta ce trece prin A si e normalaplanului π. Analog, data o dreapta a�na d si un punct A, exista un singurplan a�n ce trece prin A si e normal dreptei d.
Dat punctul A ∈ E si E1 ⊆s.a.e.
E , exista
cel putin un E2 ⊆s.a.e.
E ce trece prin A si este perpendicular pe E1. Orice
s.a.e. de tipul A + W , cu W ⊂(−→E1)⊥
indeplineste conditia ceruta.
Intr-un spatiu a�n euclidian 3 dimensional, data o dreapta a�na d si un punct
A al sau, exista o in�nitate de drepte ce trec prin A si sunt perpendiculare pe d
si reuniunea lor formeaza planul a�n prin A, normal dreptei d.
Proposition
Intersectia a doua subspatii a�ne euclidiene normale este formata
dintr-un singur punct.
De�nition
Daca E1 si E2 sunt subspatii a�ne euclidiene normale, numim
{P} = E1 ∩ E2 piciorul subspatiului normal E2 la E1 sau invers.
Theorem
(generalizarea T. celor trei perpendiculare) Fie En un spatiu a�n
euclidian n dimensional, 3 ≤ n <∞, E1 ⊂s.a.e
E , de dimensiune cel
putin 2, A ∈ E\E1, E2 (s.a.e
E1, B piciorul subspatiului normal prin
A la E1 si C piciorul subspatiului normal prin B la E2. Atunci
dreapta a�na < A,C > este perpendiculara pe E2.
Proposition
Intersectia a doua subspatii a�ne euclidiene normale este formata
dintr-un singur punct.
De�nition
Daca E1 si E2 sunt subspatii a�ne euclidiene normale, numim
{P} = E1 ∩ E2 piciorul subspatiului normal E2 la E1 sau invers.
Theorem
(generalizarea T. celor trei perpendiculare) Fie En un spatiu a�n
euclidian n dimensional, 3 ≤ n <∞, E1 ⊂s.a.e
E , de dimensiune cel
putin 2, A ∈ E\E1, E2 (s.a.e
E1, B piciorul subspatiului normal prin
A la E1 si C piciorul subspatiului normal prin B la E2. Atunci
dreapta a�na < A,C > este perpendiculara pe E2.
Proposition
Intersectia a doua subspatii a�ne euclidiene normale este formata
dintr-un singur punct.
De�nition
Daca E1 si E2 sunt subspatii a�ne euclidiene normale, numim
{P} = E1 ∩ E2 piciorul subspatiului normal E2 la E1 sau invers.
Theorem
(generalizarea T. celor trei perpendiculare) Fie En un spatiu a�n
euclidian n dimensional, 3 ≤ n <∞, E1 ⊂s.a.e
E , de dimensiune cel
putin 2, A ∈ E\E1, E2 (s.a.e
E1, B piciorul subspatiului normal prin
A la E1 si C piciorul subspatiului normal prin B la E2. Atunci
dreapta a�na < A,C > este perpendiculara pe E2.
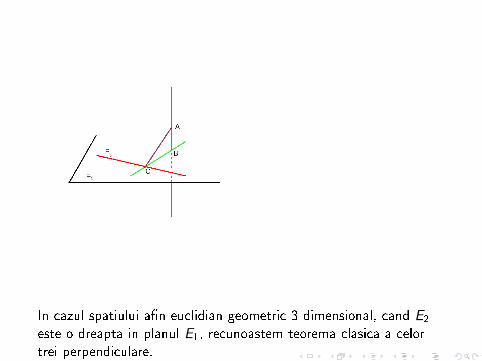
In cazul spatiului a�n euclidian geometric 3 dimensional, cand E2
este o dreapta in planul E1, recunoastem teorema clasica a celor
trei perpendiculare.
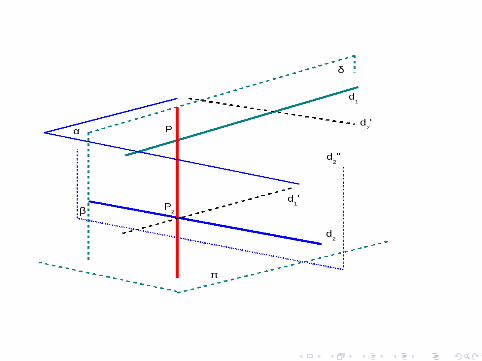
Perpendiculara comuna a doua drepte in E3
Un alt exemplu al teoriei prezentate pana acum este existenta si
unicitatea perpendicularei comune a doua drepte necoplanare.
Theorem
Fie d1 si d2 doua drepte a�ne necoplanare dintr-un spatiu a�n
euclidian E3 de dimensiune 3. Atunci exista o unica dreapta ce se
sprijina pe cele doua drepte si este perpendiculara pe ambele
drepte. Aceasta dreapta se numeste perpendiculara comuna a
dreptelor d1 si d2.
Pentru a ne folosi de intuitia geometrica, vom prezenta o
demonstratie sintetica. Deoarece doua spatii a�ne de aceeasi
dimensiune �nita sunt izomorfe, puteti considera ca spatiul a�n in
care lucram e (S,V,Φ). Demonstratiile urmatoare sunt facultative.
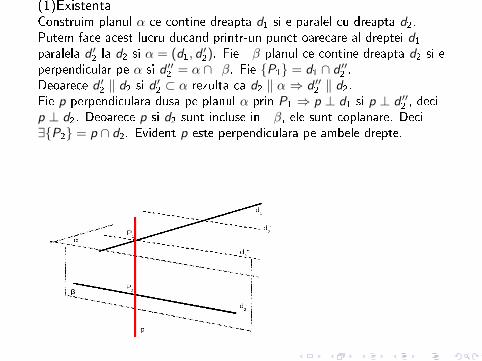
(1)ExistentaConstruim planul α ce contine dreapta d1 si e paralel cu dreapta d2.Putem face acest lucru ducand printr-un punct oarecare al dreptei d1paralela d ′
2la d2 si α = (d1, d
′2). Fie β planul ce contine dreapta d2 si e
perpendicular pe α si d ′′2
= α ∩ β. Fie {P1} = d1 ∩ d ′′2.
Deoarece d ′2‖ d2 si d ′
2⊂ α rezulta ca d2 ‖ α ⇒ d ′′
2‖ d2.
Fie p perpendiculara dusa pe planul α prin P1 ⇒ p ⊥ d1 si p ⊥ d ′′2, deci
p ⊥ d2. Deoarece p si d2 sunt incluse in β, ele sunt coplanare. Deci∃{P2} = p ∩ d2. Evident p este perpendiculara pe ambele drepte.
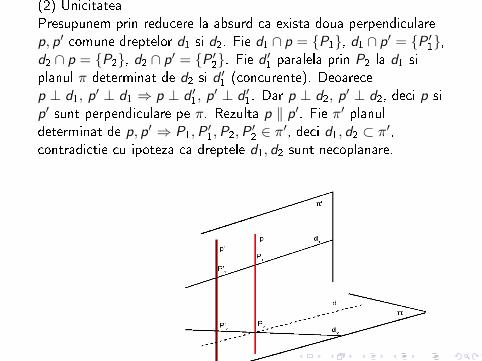
(2) Unicitatea
Presupunem prin reducere la absurd ca exista doua perpendiculare
p, p′ comune dreptelor d1 si d2. Fie d1 ∩ p = {P1}, d1 ∩ p′ = {P ′1},
d2 ∩ p = {P2}, d2 ∩ p′ = {P ′2}. Fie d ′
1paralela prin P2 la d1 si
planul π determinat de d2 si d ′1(concurente). Deoarece
p ⊥ d1, p′ ⊥ d1 ⇒ p ⊥ d ′
1, p′ ⊥ d ′
1. Dar p ⊥ d2, p
′ ⊥ d2, deci p si
p′ sunt perpendiculare pe π. Rezulta p ‖ p′. Fie π′ planuldeterminat de p, p′ ⇒ P1,P
′1,P2,P
′2∈ π′, deci d1, d2 ⊂ π′,
contradictie cu ipoteza ca dreptele d1, d2 sunt necoplanare.
Reamintim ca am construit planul α ce contine dreapta d1 si e
paralel cu dreapta d2 si planul β ce contine dreapta d2 si e
perpendicular pe α. De asemenea, am considerat planul π ce
contine dreapta d2 si e paralel cu dreapta d1. Fie planul δdeterminat de perpendiculara comuna p si de dreapta d1. Evidentacest plan e perpendicular pe π. Deci δ e planul ce contine dreapta
d1 si e perpendicular pe planul π.Perpendiculara comuna p este intersectia planelor β si δ. Vomfolosi aceasta observatie pentru a scrie cat mai simplu ecuatiile lui
p dupa ce vom introduce ecuatiile unui subspatiu a�n cand se
cunosc un punct al sau si o directie normala.
Evident, in cazul in care dreptele sunt coplanare dar distincte,
putem avea urmatoarele situatii:
Daca cele doua drepte sunt concurente, exista o singura
perpendiculara comuna lor, si anume dreapta ce trece prin punctul
lor de intersectie si e perpendiculara pe planul celor doua drepte.
Daca cele doua drepte sunt paralele, atunci orice dreapta inclusa in
planul celor doua drepte, perpendiculara pe una dintre ele va �
perpendiculara si pe a doua si evident le va intersecta pe
amandoua. Deci in acest caz avem o in�nitate de perpendiculare
comune, toate paralele intre ele.