curso de engenharia mecânicalyceumonline.usf.edu.br/salavirtual/documentos/1503.pdf · - 2- curso...
TRANSCRIPT
- 1-
Curso de Engenharia Mecânica
AUTOMAÇÃO DO GONIÔMETRO: APLICAÇÃO NO LNLS
(LABORATÓRIO DE LUZ SÍNCROTRON)
César Bassetto Gabos
Campinas – São Paulo – Brasil
Dezembro de 2008
- 2-
Curso de Engenharia Mecânica
AUTOMAÇÃO DO GONIÔMETRO: APLICAÇÃO NO LNLS
(LABORATÓRIO DE LUZ SÍNCROTRON)
César Bassetto Gabos
Monografia apresentada à disciplina de Trabalho de Conclusão de Curso, do Curso de Engenharia Mecânica da Universidade São Francisco, sob a orientação do Prof. Dr. Daniel Ibraim Pires Atala, como exigência parcial para conclusão do curso de graduação.
Orientador : Prof. Dr. Daniel Ibraim Pires Atala
Campinas – São Paulo – Brasil
Dezembro de 2008
- 3-
AUTOMAÇÃO DO GONIÔMETRO: APLICAÇÃO NO LNLS
(LABORATÓRIO DE LUZ SÍNCROTRON)
César Bassetto Gabos
Monografia defendida e aprovada em 06 de dezembro de 2008 pela Banca
Examinadora assim constituída:
Prof Dr. Daniel Ibraim Pires Atala (Orientador)
USF – Universidade São Francisco – Campinas – SP.
Prof Dr. Osmar Roberto Bagnato (Membro Interno)
USF – Universidade São Francisco – Campinas – SP.
Prof Dr. Guilherme Bezzon (Membro Interno)
USF – Universidade São Francisco – Campinas – SP.

- 4-
"Tudo tem seu tempo e até certas manifestações
mais vigorosas e originais entram em voga ou
saem de moda. Mas a sabedoria tem uma
vantagem: é eterna."
Baltasar Gracián

- 5-
Dedico este trabalho a todos àqueles que
acreditam que a ousadia e o erro são caminhos
para as grandes realizações
- 6-
.Agradecimentos
Agradeço primeiramente ao Professor Dr. Osmar Roberto Bagnato, que me incentivou a
realizar essa pesquisa e apoiou-me durante todo o processo.
Agradeço também ao Professor Dr. Daniel Ibraim Pires Atala, meu orientador, principalmente
pela paciência e apoio técnico que foram indispensáveis para a realização desse trabalho.
Aos técnicos do laboratório que me auxiliaram para a confecção do protótipo.
Não poderia deixar de agradecer imensamente aos meus pais, que em todos os momentos
difíceis estiveram ao meu lado me encorajando e assim possibilitando que mais essa conquista
fosse alcançada.
Meus irmãos queridos, que mais do que nunca se uniram para me ajudar a superar os desafios
dessa etapa da minha vida.
À minha namorada, que compreendeu minha ausência e incentivou minha persistência para
vencer os problemas que surgiram.
Finalmente aos amigos Karel, Ivan e Murilo que fizeram parte dessa etapa inesquecível de
minha vida. Obrigado pelos momentos de descontração e troca de experiências.
Eu agradeço imensamente a todos.
- 7-
Sumário
Lista de Figuras ........................................................................................................................ 8
Resumo ...................................................................................................................................... 9
Abstract ................................................................................................................................... 10
1 INTRODUÇÃO................................................................................................................ 11 1.1 Objetivos ..................................................................................................................... 13 1.2 Justificativa.................................................................................................................. 13
2 REVISÃO BIBLIOGRÁFICA ....................................................................................... 14 2.1 Como funciona o “Síncrotron”.................................................................................... 14 2.2 Partes de um goniômetro............................................................................................. 15
2.2.1 Motor de passo .....................................................................................................15 2.2.2 Driver de controle do motor de passo...................................................................17 2.2.3 Encoder.................................................................................................................18
2.3 LabVIEW .................................................................................................................... 19 2.4 Comunicação RS 232 / RS 485 .................................................................................. 19
3 MATERIAL E MÉTODOS ............................................................................................ 21 3.1 Desenho....................................................................................................................... 21 3.2 Desenvolvimento do protótipo.................................................................................... 22
3.2.1 Protótipo ...............................................................................................................22 3.2.2 Instalação do driver / encoder...............................................................................23 3.2.3 Instalação do Motor de passo ...............................................................................25
3.3 Programação em LabVIEW ........................................................................................ 26 3.3.1 Comunicação ........................................................................................................26 3.3.2 Armazenagem dos dados ......................................................................................27 3.3.3 Interface gráfica do programa...............................................................................28
3.4 Resultados ................................................................................................................... 29
4 Conclusão.......................................................................................................................... 31 4.1 Extensões..................................................................................................................... 32 Referências Bibliográficas .................................................................................................... 33
- 8-
Lista de Figuras
FIGURA 1 - APLICAÇÃO DE UM GONIÔMETRO COMERCIAL COMO POSICIONADOR DE UM PORTA
AMOSTRA[3] ......................................................................................................................15
FIGURA 2 - DESENHO DE UM LABORATÓRIO SINCROTRON. [ 2] ................................................15
FIGURA 3 - MOTOR DE PASSO, PRINCÍPIO DE FUNCIONAMENTO..................................................16
FIGURA 4 - IMAGEM DAS PARTES QUE COMPÕE O ENCODER, ELETRÔNICA LEITOR E ESCALA DE
VIDRO . [7].........................................................................................................................18
FIGURA 5 - IMAGEM SUPERIOR DO GONIÔMETRO ADAPTADO PARA RECEBER O DRIVER. ............21
FIGURA 6 - IMAGEM INFERIOR DO GONIÔMETRO ADAPTADO PARA RECEBER O DISCO DO
ENCODER. ..........................................................................................................................22
FIGURA 7 - FOTO DO PROTÓTIPO LINEAR. ..................................................................................23
FIGURA 8 - ESQUEMA DE LIGAÇÃO DRIVER , MOTOR DE PASSO, COMPUTADOR E ENCODER . .....24
FIGURA 9 - ESQUEMA DA PLACA DO “FILTRO” COM ENTRADAS E SAÍDAS..................................25
FIGURA 10 - ESQUEMAS DE FIAÇÃO DO MOTOR DE PASSO..........................................................25
FIGURA 11 – PROGRAMAÇÃO PARA ENVIO DE ALFANUMÉRICOS NA PORTA SERIAL. ..................26
FIGURA 12 - PROGRAMAÇÃO PARA RECEBER A RESPOSTA DE ALGUM COMANDO.......................27
FIGURA 13 – BLOCO UTILIZADO PARA ARMAZENAMENTO DE DADOS. .......................................28
FIGURA 14 – ÁREA DE TRABALHO DO PROGRAMA DE CONTROLE DO GONIÔMETRO. ..................28
FIGURA 15 – GRÁFICO DO ERRO EM µM, PARA CADA DESLOCAMENTO DE 100µM LINEAR. .........29
FIGURA 16 – GRÁFICO DO ERRO EM µM CORRIGIDO COM TOLERÂNCIA DE 1 µM, PARA CADA
DESLOCAMENTO DE 100µM LINEAR. ..................................................................................30
- 9-
Resumo
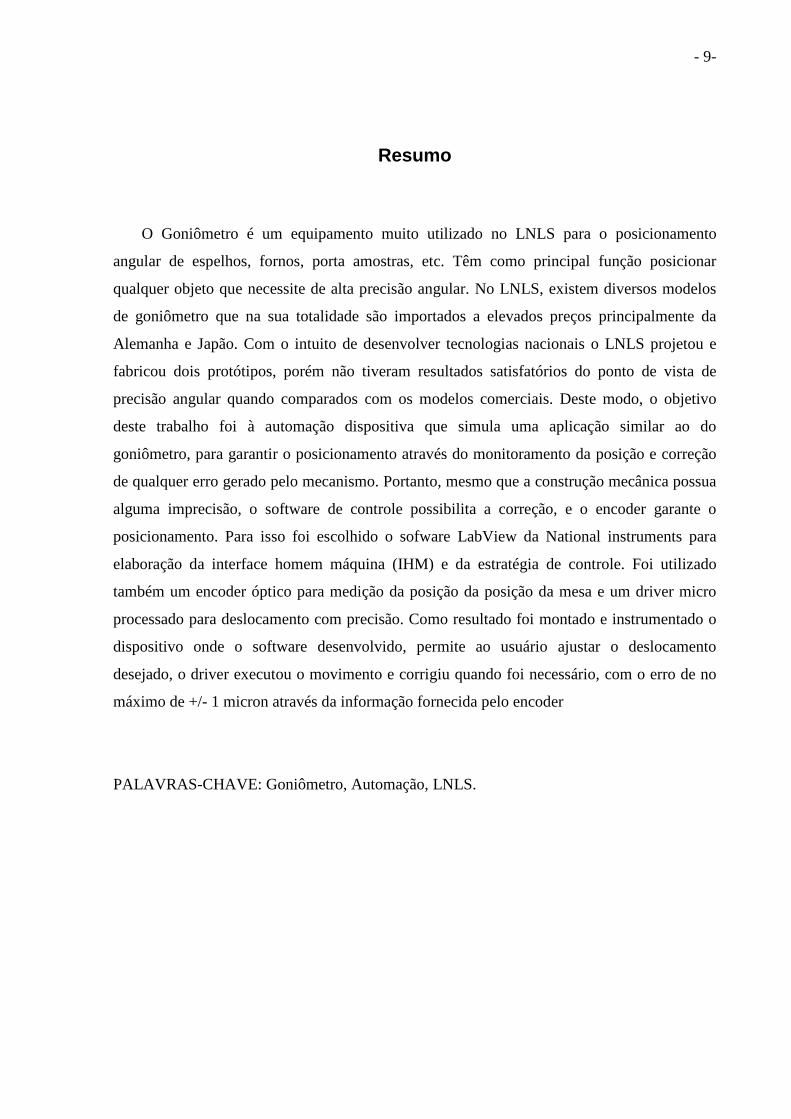
O Goniômetro é um equipamento muito utilizado no LNLS para o posicionamento
angular de espelhos, fornos, porta amostras, etc. Têm como principal função posicionar
qualquer objeto que necessite de alta precisão angular. No LNLS, existem diversos modelos
de goniômetro que na sua totalidade são importados a elevados preços principalmente da
Alemanha e Japão. Com o intuito de desenvolver tecnologias nacionais o LNLS projetou e
fabricou dois protótipos, porém não tiveram resultados satisfatórios do ponto de vista de
precisão angular quando comparados com os modelos comerciais. Deste modo, o objetivo
deste trabalho foi à automação dispositiva que simula uma aplicação similar ao do
goniômetro, para garantir o posicionamento através do monitoramento da posição e correção
de qualquer erro gerado pelo mecanismo. Portanto, mesmo que a construção mecânica possua
alguma imprecisão, o software de controle possibilita a correção, e o encoder garante o
posicionamento. Para isso foi escolhido o sofware LabView da National instruments para
elaboração da interface homem máquina (IHM) e da estratégia de controle. Foi utilizado
também um encoder óptico para medição da posição da posição da mesa e um driver micro
processado para deslocamento com precisão. Como resultado foi montado e instrumentado o
dispositivo onde o software desenvolvido, permite ao usuário ajustar o deslocamento
desejado, o driver executou o movimento e corrigiu quando foi necessário, com o erro de no
máximo de +/- 1 micron através da informação fornecida pelo encoder
PALAVRAS-CHAVE: Goniômetro, Automação, LNLS.
- 10-
Abstract
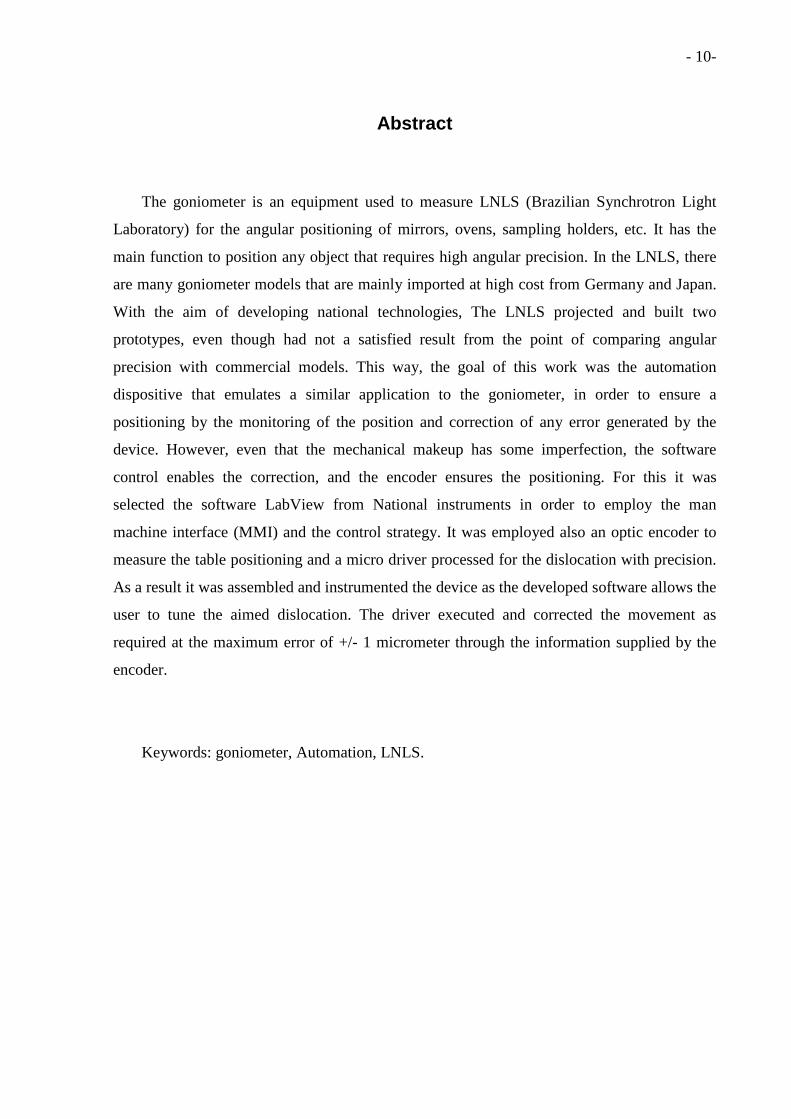
The goniometer is an equipment used to measure LNLS (Brazilian Synchrotron Light
Laboratory) for the angular positioning of mirrors, ovens, sampling holders, etc. It has the
main function to position any object that requires high angular precision. In the LNLS, there
are many goniometer models that are mainly imported at high cost from Germany and Japan.
With the aim of developing national technologies, The LNLS projected and built two
prototypes, even though had not a satisfied result from the point of comparing angular
precision with commercial models. This way, the goal of this work was the automation
dispositive that emulates a similar application to the goniometer, in order to ensure a
positioning by the monitoring of the position and correction of any error generated by the
device. However, even that the mechanical makeup has some imperfection, the software
control enables the correction, and the encoder ensures the positioning. For this it was
selected the software LabView from National instruments in order to employ the man
machine interface (MMI) and the control strategy. It was employed also an optic encoder to
measure the table positioning and a micro driver processed for the dislocation with precision.
As a result it was assembled and instrumented the device as the developed software allows the
user to tune the aimed dislocation. The driver executed and corrected the movement as
required at the maximum error of +/- 1 micrometer through the information supplied by the
encoder.
Keywords: goniometer, Automation, LNLS.
- 11-
INTRODUÇÃO
O LNLS, Laboratório de Luz Síncrotron, é um laboratório de pesquisa criado por
pesquisadores de diversas áreas. A maior parte dos equipamentos foram projetados e
produzidos no Brasil. Do projeto até o início de suas atividades passaram-se 10 anos (1987-
1997). O Ministério da Ciência e Tecnologia (MCT) e o Conselho Nacional de
Desenvolvimento Científico e Tecnológico (CNPq) investiram na implantação do LNLS. Em
1997 o equipamento começou a ser usado por pesquisadores brasileiros, como um Centro
Nacional de Ciência e Tecnologia, aberto simultaneamente a inúmeras áreas do
conhecimento. Os pesquisadores brasileiros construíram a fonte de Luz Síncrotron e sem
dúvidas possuem total domínio dessa tecnologia não dependendo de capacidades externas
para fazê-la funcionar e mantê-la atualizada tecnologicamente. Além disso, o LNLS fabrica
componentes para outros laboratórios Síncrotron no mundo.[3]
Goniômetro é um mecanismo, que possibilita o posicionamento angular da amostra com
alta precisão. Ele é utilizado no fim das linhas de luz para obter um ângulo de incidência do
feixe de raio X gerado pela radiação Síncrotron.
O goniômetro pode ser dividido em duas partes: A primeira parte é formada pelo motor, o
acoplamento elástico, o eixo sem fim e os rolamentos de esfera, e a segunda parte é formada
pela coroa, o rolamento de rolos cruzados e a mesa. Para que o goniômetro seja eficiente às
duas partes devem desenvolver apenas movimentos angulares mesmo sob esforços.
Esse TCC abordará uma sugestão de automação na aplicação do goniômetro utilizado nas
linhas de luz para posicionamento angular de espelhos, fornos, porta amostras, etc. Terá como
ponto de partida os dois protótipos desenvolvidos no LNLS.
No primeiro foi utilizado um rolamento de rolos cruzados de alta capacidade e montagem
com pré-carregamento. O principal problema encontrado nele foi que a mesa não demonstrou
uma grande resistência mecânica, com isso, o equipamento não apresentou a precisão
esperada. Já no segundo protótipo foi utilizado o rolamento com a coroa integrada a ele e as
pistas de rolagem das esferas foram formadas por arames de aço, nesse caso foi obtido um
resultado razoável, porém longe do esperado.
O projeto proposto inicialmente foi à automação do goniômetro, com as seguintes
modificações:
- Melhoria no processo de fabricação das peças de alta precisão
- Automação do movimento
- Substituição do driver do motor de passo, de placas em bastidores, por uma placa que
ficará instalada no interior do goniômetro.
- 12-
- Instalação de um encoder com disco de vidro para monitorar o movimento e executar
possíveis correções.
- Aquisição de engrenagens comerciais calibradas e fabricação do rolamento com arames
de aço.
O projeto por ser muito extenso, abordará apenas parte dos itens acima listados. Esta
incluso neste trabalho o esboço da adaptação dos desenhos 3D, montagem de uma bancada de
teste e programação em LABView, que consiste em executar as ligações entre o encoder,
drive e o computador. A programação será realizada de tal forma que o usuário efetue e
monitore os movimentos e o software otimize a precisão do mecanismo através de correções.
- 13-
1.1 Objetivos
O projeto de melhoria do goniômetro espera aumentar precisão mecânica, de tal forma
que mesmo com esforços aplicados ele continue com a mesma precisão no movimento
angular, com a garantia do posicionamento. Desenvolver uma automação para manipular e
monitorar o equipamento fora da área susceptível a radiação, com isso o operador poderá
controlar a distância o equipamento com mais precisão no movimento.
1.2 Justificativa
A necessidade de automação do protótipo do goniômetro surgiu pelos seguintes motivos:
a impossibilidade de acesso ao experimento devido à exposição à radiação ali existente, baixa
precisão dos movimentos, falta de repetibilidade dos movimentos, entre outros. Esse trabalho
tem o propósito do desenvolvimento de instrumentação cientifica com a interação entre o
LNLS e a Universidade São Francisco. O novo protótipo pretende aprimorar o já existente
visando aproximar sua qualidade à de produtos internacionais. Desta forma, tem-se um
produto de tecnologia nacional com custos viáveis e acessíveis.
- 14-
2 REVISÃO BIBLIOGRÁFICA
O projeto envolve diversas áreas da engenharia de automação para isso este capítulo tem
como objetivo introduzir os principais conceitos, a respeito do equipamento estudado e
também introduzir alguns conceitos de automação.
2.1 Como funciona o “Síncrotron”
O caminho dos elétrons se inicia no canhão de elétrons. Eles são acelerados
retilineamente por um campo elétrico até energias da ordem de centenas de milhares de
elétron-volts, mediante aplicação de uma alta tensão. Para acelerar elétrons as energias de
ordem de 1 MeV (Mega elétron-volts), é utilizado os aceleradores lineares (LINACs), nos
quais a energia é fornecida por uma fonte de microondas. Ainda na etapa de aceleração os
pacotes de elétrons são direcionados por campos magnéticos para o booster. Desta forma,
quando os pacotes de elétrons entram em órbita no interior do booster, ele elevada a corrente
do feixe. [ 4]
Já acelerados, os pacotes de elétrons são guiados por campos magnéticos para a órbita do
anel de armazenamento. O anel de armazenamento existente no LNLS tem capacidade para
24 linhas de luz.
No anel existem ramificações logo após os dipolos, onde o feixe de elétrons faz as curvas
e é nessa mudança de trajetória que é gerada a radiação Síncrotron. Em cada ramificação são
instaladas as linhas de luz e em cada uma existe uma estação experimental. Cada estação é
formada por equipamentos e instrumentação que permitem ao cientista realizar pesquisas
utilizando a luz Síncrotron. Uma estação experimental inclui o sistema porta-amostra no qual
é colocada a amostra do material que se quer analisar, aparelho goniométrico permite
posicionar a amostra para receber adequadamente a incidência da luz Síncrotron e detectores
de feixes de fótons espalhados ou transmitidos que registram os acontecimentos físicos que
ocorrem nos átomos e moléculas do material em estudo.

- 15-
Figura 1 - Aplicação de um goniômetro comercial como posicionador de um porta amostra[3]
Figura 2 - Desenho de um Laboratório Sincrotron. [ 2]
2.2 Partes de um goniômetro
2.2.1 Motor de passo
FUNCIONAMENTO BÁSICO DO MOTOR DE PASSO [6]
Os motores de passo são projetados com enrolamento em mais de uma fase. A quantidade
de passos por volta é determinado pela quantidade de pólos. O deslocamento depende da
corrente aplicada nas bobinas (denominado como pulsos), essa seqüência de pulsos pemite ao
motor desenvolver o deslocamento desejado.
- 16-
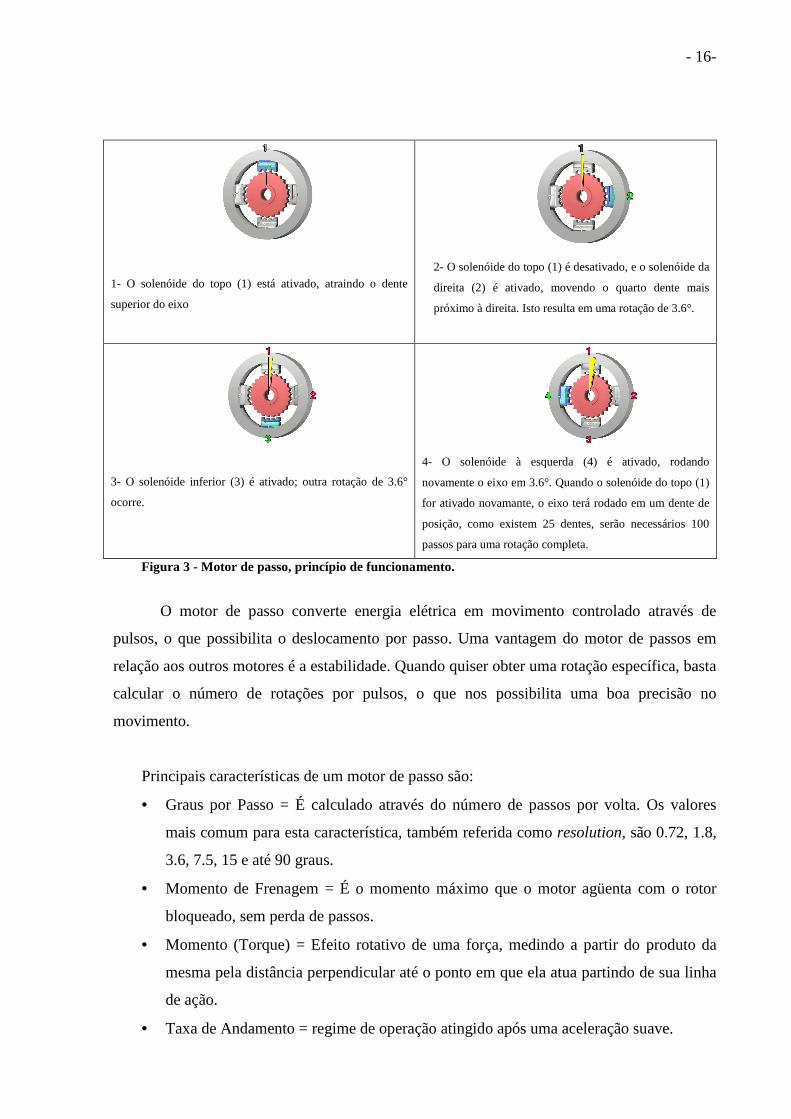
1- O solenóide do topo (1) está ativado, atraindo o dente
superior do eixo
2- O solenóide do topo (1) é desativado, e o solenóide da
direita (2) é ativado, movendo o quarto dente mais
próximo à direita. Isto resulta em uma rotação de 3.6°.
3- O solenóide inferior (3) é ativado; outra rotação de 3.6°
ocorre.
4- O solenóide à esquerda (4) é ativado, rodando
novamente o eixo em 3.6°. Quando o solenóide do topo (1)
for ativado novamante, o eixo terá rodado em um dente de
posição, como existem 25 dentes, serão necessários 100
passos para uma rotação completa.
Figura 3 - Motor de passo, princípio de funcionamento.
O motor de passo converte energia elétrica em movimento controlado através de
pulsos, o que possibilita o deslocamento por passo. Uma vantagem do motor de passos em
relação aos outros motores é a estabilidade. Quando quiser obter uma rotação específica, basta
calcular o número de rotações por pulsos, o que nos possibilita uma boa precisão no
movimento.
Principais características de um motor de passo são:
• Graus por Passo = É calculado através do número de passos por volta. Os valores
mais comum para esta característica, também referida como resolution, são 0.72, 1.8,
3.6, 7.5, 15 e até 90 graus.
• Momento de Frenagem = É o momento máximo que o motor agüenta com o rotor
bloqueado, sem perda de passos.
• Momento (Torque) = Efeito rotativo de uma força, medindo a partir do produto da
mesma pela distância perpendicular até o ponto em que ela atua partindo de sua linha
de ação.
• Taxa de Andamento = regime de operação atingido após uma aceleração suave.
- 17-
• Momento de Inércia = medida da resistência mecânica oferecida por um corpo à
aceleração angular.
• Tensão de trabalho = A tensão em que trabalha o motor é fundamental na obtenção do
torque do componente. A tensão de trabalho do motor não necessariamente deve ser a
tensão utilizada na lógica do circuito. Os valores normalmente encontrados variam de
5V à 48V.
2.2.2 Driver de controle do motor de passo
Para funcionar um motor de passo, é necessário algum equipamento que controle o envio
de pulsos nas bobinas, de tal forma que o motor faça os movimentos desejados. Esse controle
é feito normalmente por um driver. Existem muitos tipos de driver, nesse trabalho foi
utilizado o do tipo micro-processado.
O driver modelo EZHR17EN do fabricante All Motion, possibilita controlar o motor de
passo com alta resolução. Driver conta com um controlador com entrada para encoder
Feedback, ou seja, ele possibilita controlar a posição real do motor de passo.
Características:
- Com 4-fios simples interliga até 16 drives
- 2A de corrente reversível (PWM) driver passos
- Operado de 10V a 40V
- Comunicação RS232, RS485 or USB
- Instalado EEPROM para armazenagem do programa
- Opcional operação independente sem estar conectado ao PC
- Opcional segundo motor de passo ou motor DC “daughter card”
- Equipado com opto-chaves inputs
- 1/2 a 1/256 step de controle bipolar
- Mais de 16 milhões microsteps/segundos
- Cavro DT ou OEM protocolo compatível
- Corrente auto selecionável após a conclusão
- Passo com 4 MHz freqüência.
- Modo encoder secundário
- 18-
- Totalmente programáveis rampas e velocidades
- Saídas quatro digitais I/O; e duas 1A On/Off driver para acionar relé, motores DC,
solenóide, etc.
- Chave selecionadora de endereço do dispositivo (16 possíveis endereços).
- Software-configurável "Mover" e "Parado"
2.2.3 Encoder
Encoder é um sensor que converte movimentos lineares ou angulares em informações
para um sistema, permitindo assim, saber qual a posição atual do robô, motor, ou qualquer
que seja o dispositivo monitorado. Essas informações detectadas pelo encoder são
transformadas em sinais elétricos binários, com isso um sistema que esteja recebendo esses
sinais pode converter em informações como posição, velocidades e aceleração.
Dentre os diversos tipos de encoder, o que será utilizado é um sensor óptico micro
processado. Ele é composto pelo vidro raiado, pela cabeça óptica e pela eletrônica, sua
instalação é feita no equipamento de tal forma que o sensor óptico corra sobre o vidro raiado,
com isso ele transmite para a eletrônica o sinal de movimento. A eletrônica trata esse sinal de
acordo com as configurações pré-estabelecidas.
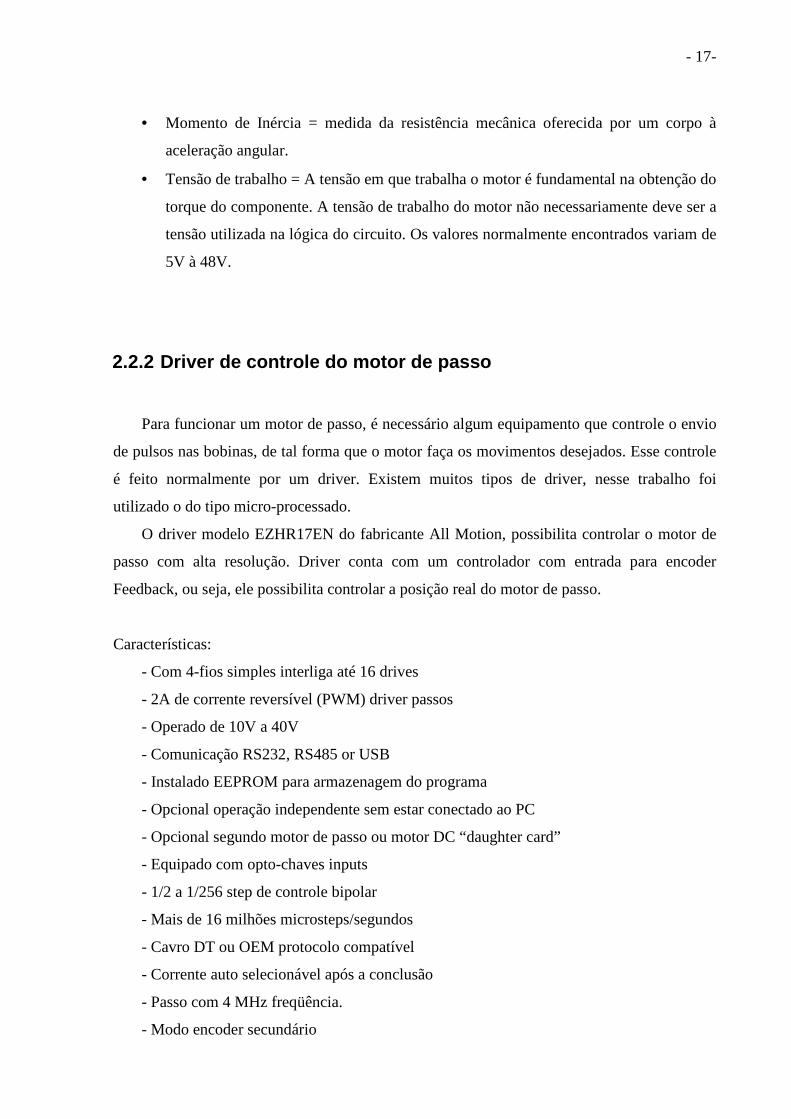
O encoder escolhido para se utilizar no protótipo foi o modelo Mercury 3000 do
fabricante MicroE Systems.
Figura 4 - Imagem das partes que compõe o encoder, eletrônica leitor e escala de vidro . [7]
- 19-
2.3 LabVIEW
O LabVIEW (Laboratory Virtual Instruments Engineering Workbench) é uma
linguagem de programação diferente pois ao invés de utilizar linhas de códigos, utiliza-se uma
linguagem gráfica, composta por muitos módulos conectados. O LabVIEW é considerado um
instrumento virtual, devido ao fato de poder simular instrumentos, como osciloscópio
multímetros etc. Ele possui ferramentas para análises, monitoramento e armazenagem de
dados.
No LabVIEW o usuário desenvolve seu painel de monitoramento com indicadores,
botões, potenciômetros, discadores e mostradores de saída entre outros. Depois de construir a
interface são construídas as estruturas de controles. A comunicação de entradas e saídas pode
ser feitas por GPIB, PXI, VXI, RS232, RS485, TCP/IP e USB entre outros .
Os programas no LabVIEW são chamados de Virtual Intruments (VI’s) porque a
aparência e as operações simulam instrumentos reais
2.4 Comunicação RS 232 / RS 485 [5]
A interface de comunicação é definida de acordo com a aplicação, a porta serial do
computador se comunica através do RS232, que surgiu na década de 60, para padronização de
transferência de dados entre equipamentos. Essa interface que foi criada para comunicação de
curta distância entre o computador central (mainframe) e terminais de computador remotos,
ou entre dois terminais. Em muitos casos ela não atende as necessidades das indústrias.
No RS 232 os sinais são representados por níveis de tensão referentes ao terra. Ele possuí
3 fios, um para transmissão, outro para recepção e o fio terra para referência dos níveis de
tensão. A necessidade do terra comum entre os dois circuitos limita o comprimento do cabo
em aproximadamente dez metros, os principais fatores são a resistência do cabo e
interferências ao longo do cabo.
No RS 485 utiliza-se um princípio diferente, no qual apenas dois fios são utilizados, não
necessitando do terra. Nesse caso tem-se nível lógico 1 quando, A for positivo e B negativo,
conseqüentemente tem-se nível lógico 0 quando B for positivo e A negativo.Verifica-se que o
nível lógico é determinado pela diferença de tensão entre os fios, daí o nome de modo de
operação diferencial. Essa configuração permite que o cabo possua longas distâncias, sem
perdas do sinal.
- 20-
Uma vantagem do padrão RS-485 é que ele é facilmente convertido para o padrão RS-
232, com um circuito utilizando um CI, assim tem-se a compatibilidade. Existem dispositivos
no mercado, visto que a maioria dos computadores já possui saída RS-232.
- 21-
3 MATERIAL E MÉTODOS
O objetivo deste capítulo é apresentar o funcionamento do goniômetro e expor as
melhorias desenvolvidas por esse trabalho, de forma detalhada em cada etapa.
3.1 Desenho
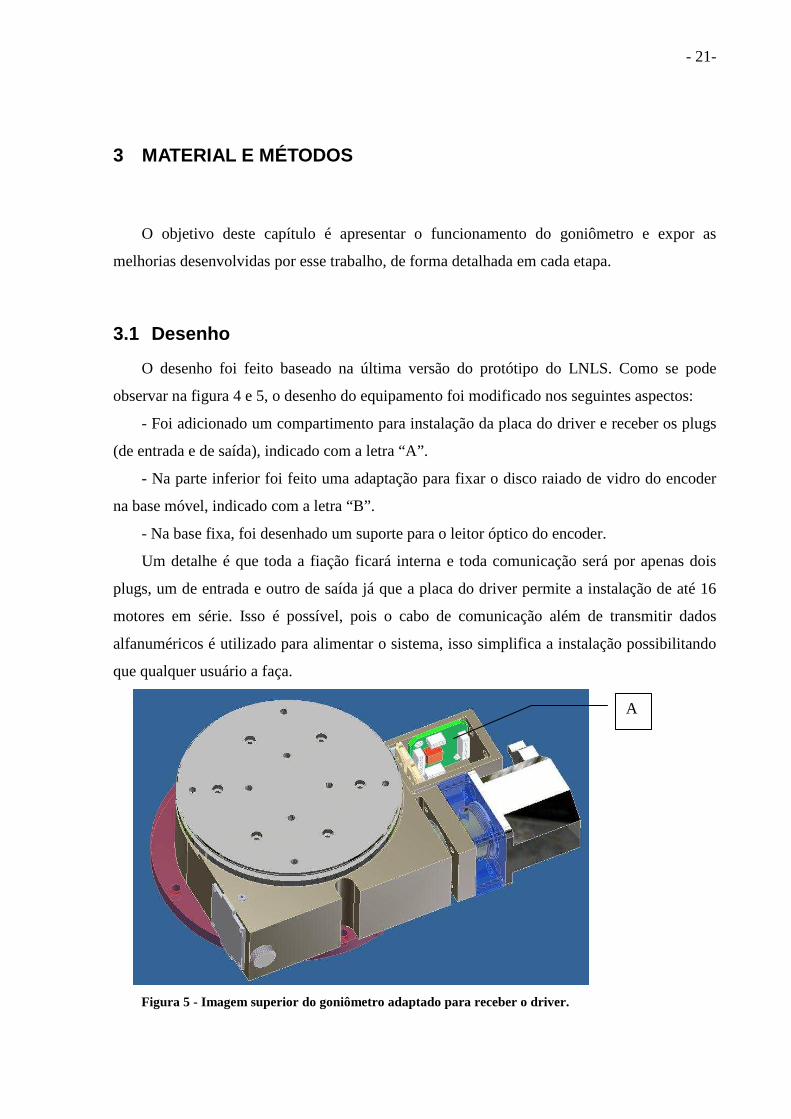
O desenho foi feito baseado na última versão do protótipo do LNLS. Como se pode
observar na figura 4 e 5, o desenho do equipamento foi modificado nos seguintes aspectos:
- Foi adicionado um compartimento para instalação da placa do driver e receber os plugs
(de entrada e de saída), indicado com a letra “A”.
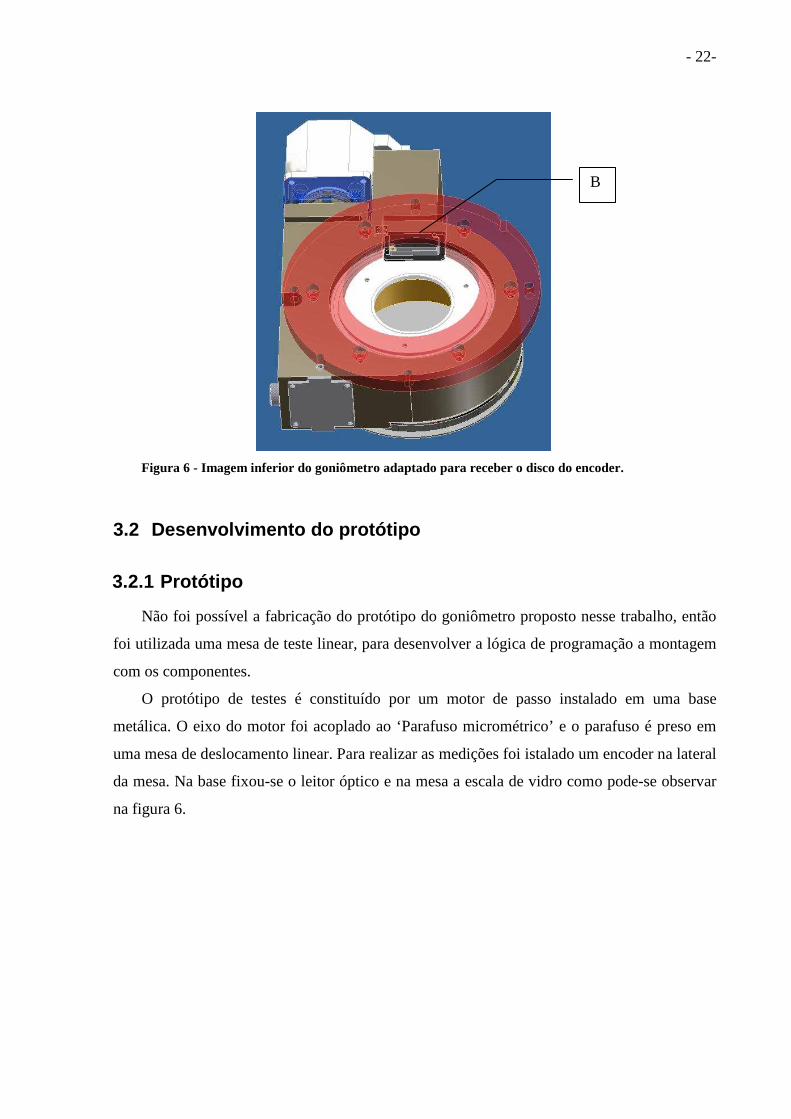
- Na parte inferior foi feito uma adaptação para fixar o disco raiado de vidro do encoder
na base móvel, indicado com a letra “B”.
- Na base fixa, foi desenhado um suporte para o leitor óptico do encoder.
Um detalhe é que toda a fiação ficará interna e toda comunicação será por apenas dois
plugs, um de entrada e outro de saída já que a placa do driver permite a instalação de até 16
motores em série. Isso é possível, pois o cabo de comunicação além de transmitir dados
alfanuméricos é utilizado para alimentar o sistema, isso simplifica a instalação possibilitando
que qualquer usuário a faça.
Figura 5 - Imagem superior do goniômetro adaptado para receber o driver.
A
- 22-
Figura 6 - Imagem inferior do goniômetro adaptado para receber o disco do encoder.
3.2 Desenvolvimento do protótipo
3.2.1 Protótipo
Não foi possível a fabricação do protótipo do goniômetro proposto nesse trabalho, então
foi utilizada uma mesa de teste linear, para desenvolver a lógica de programação a montagem
com os componentes.
O protótipo de testes é constituído por um motor de passo instalado em uma base
metálica. O eixo do motor foi acoplado ao ‘Parafuso micrométrico’ e o parafuso é preso em
uma mesa de deslocamento linear. Para realizar as medições foi istalado um encoder na lateral
da mesa. Na base fixou-se o leitor óptico e na mesa a escala de vidro como pode-se observar
na figura 6.
B

- 23-
Figura 7 - Foto do protótipo linear.
No goniômetro, o giro do motor de passo é reduzido de acordo com a relação de
engrenagem da coroa e a rosca sem fim, já na mesa linear utilizada a rotação do motor será
tranformada em movimento linerar de acordo com a relação do parafuso micrométrico.
O parafuso micrométrico possui a relação de 500 microns por volta, ou seja, cada 360° do
motor a mesa percorrerá 500 microns. Essa relação será utilizada na programação para
converter o giro do motor em movimento linear.
3.2.2 Instalação do driver / encoder
O driver é responsável por toda a comunicação entre o protótipo e o computador. Para
isso, ele necessita ser ligado ao computador, ao motor de passo e ao encoder. Como se pode
ver no esquema na figura 7, foram feitas as seguintes ligações:
- O drive da Allmotion modelo EZHR17EN, se comunica pela RS485, para ligar-se
diretamente ao computador, visto que o computador de comunica com o RS232, necessitou-
se de um conversor de RS485 para RS232, disponibilizado pelo fabricante. O conversor foi
Leitor óptico (encoder)
Motor de passo Driver Mesa em X
- 24-
ligado ao computador na porta serial. Nele é ligado uma fonte de 12 a 40V e o cabo de
comunicação até a placa do driver.
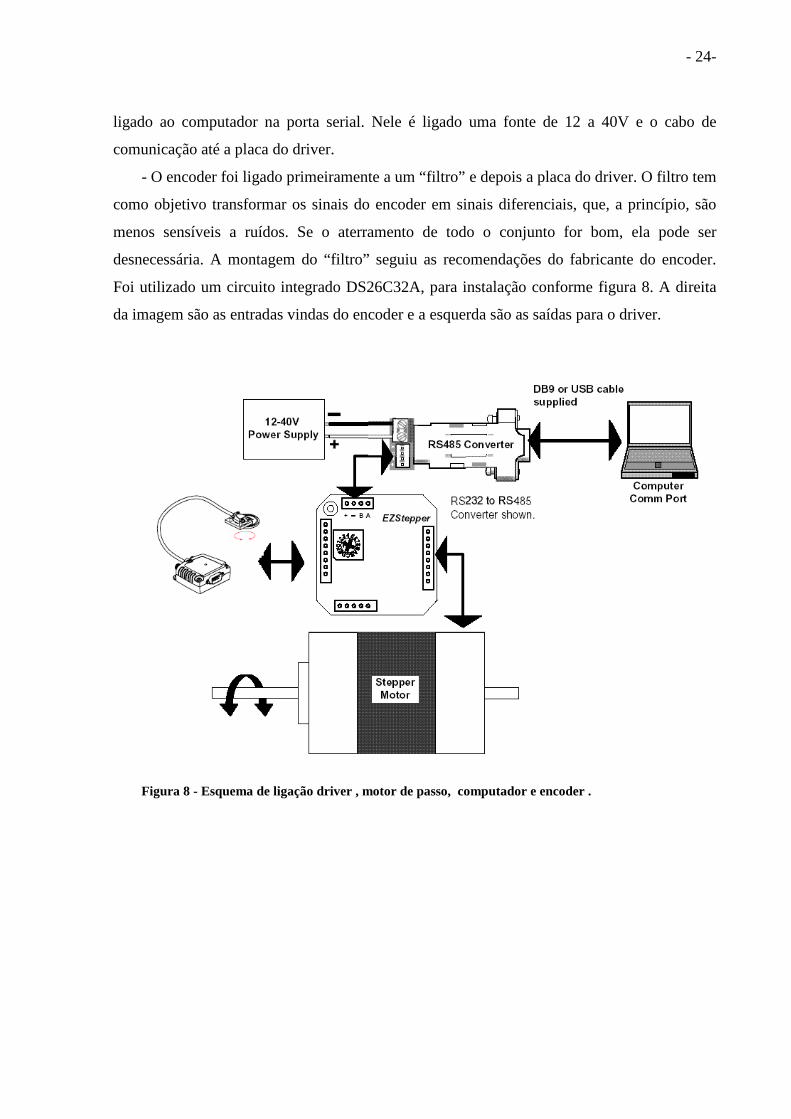
- O encoder foi ligado primeiramente a um “filtro” e depois a placa do driver. O filtro tem
como objetivo transformar os sinais do encoder em sinais diferenciais, que, a princípio, são
menos sensíveis a ruídos. Se o aterramento de todo o conjunto for bom, ela pode ser
desnecessária. A montagem do “filtro” seguiu as recomendações do fabricante do encoder.
Foi utilizado um circuito integrado DS26C32A, para instalação conforme figura 8. A direita
da imagem são as entradas vindas do encoder e a esquerda são as saídas para o driver.
Figura 8 - Esquema de ligação driver , motor de passo, computador e encoder .
- 25-
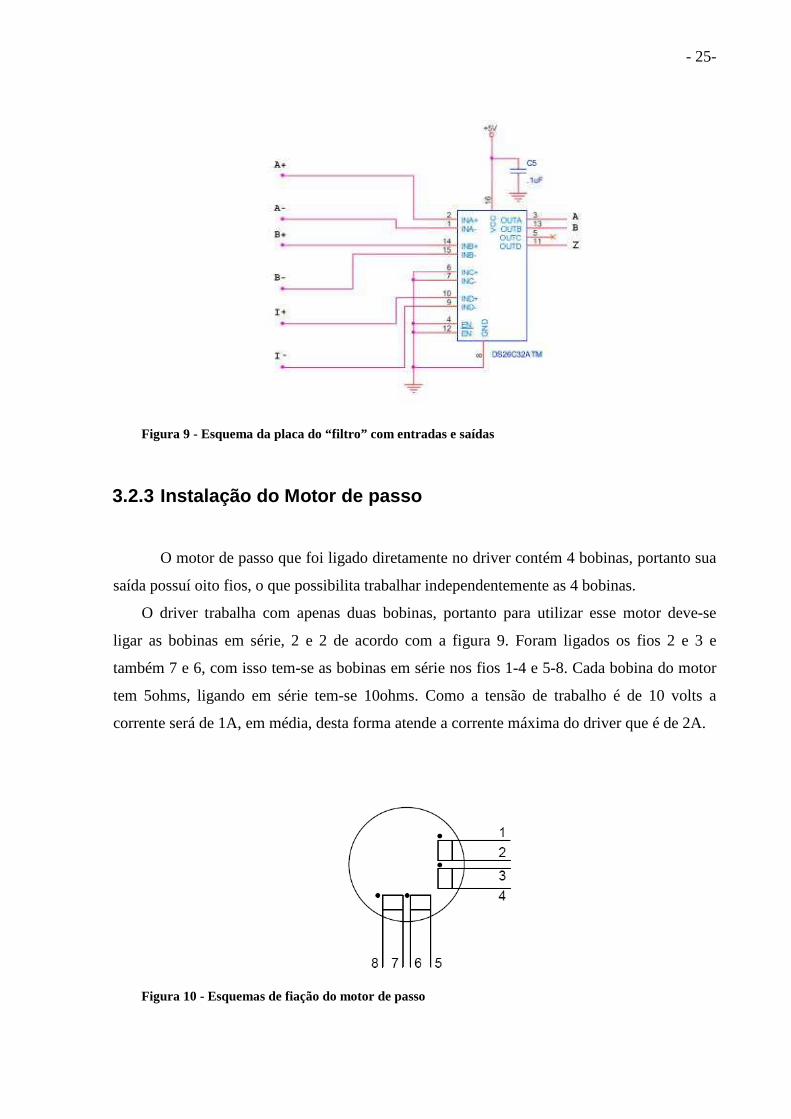
Figura 9 - Esquema da placa do “filtro” com entradas e saídas
3.2.3 Instalação do Motor de passo
O motor de passo que foi ligado diretamente no driver contém 4 bobinas, portanto sua
saída possuí oito fios, o que possibilita trabalhar independentemente as 4 bobinas.
O driver trabalha com apenas duas bobinas, portanto para utilizar esse motor deve-se
ligar as bobinas em série, 2 e 2 de acordo com a figura 9. Foram ligados os fios 2 e 3 e
também 7 e 6, com isso tem-se as bobinas em série nos fios 1-4 e 5-8. Cada bobina do motor
tem 5ohms, ligando em série tem-se 10ohms. Como a tensão de trabalho é de 10 volts a
corrente será de 1A, em média, desta forma atende a corrente máxima do driver que é de 2A.
Figura 10 - Esquemas de fiação do motor de passo
- 26-
3.3 Programação em LabVIEW
A linguagem de programação escolhida para o projeto foi o LabVIEW (Laboratory
Virtual Instruments Engineering Workbench). Trata-se de uma linguagem de programação
desenvolvida pela National Instruments. A escolha se justifica por diversos fatores, como a
facilidade de desenvolver a programação, possibilidade de comunicação via serial,
necessidade de interface gráfica com o usuário.
3.3.1 Comunicação
A programação no LabVIEW é feita através de blocos, isso facilita tanto a programação
quanto a visualização. Ele possui blocos para comunicação com diversas portas do
computador. Neste trabalho foi utilizada a porta serial.
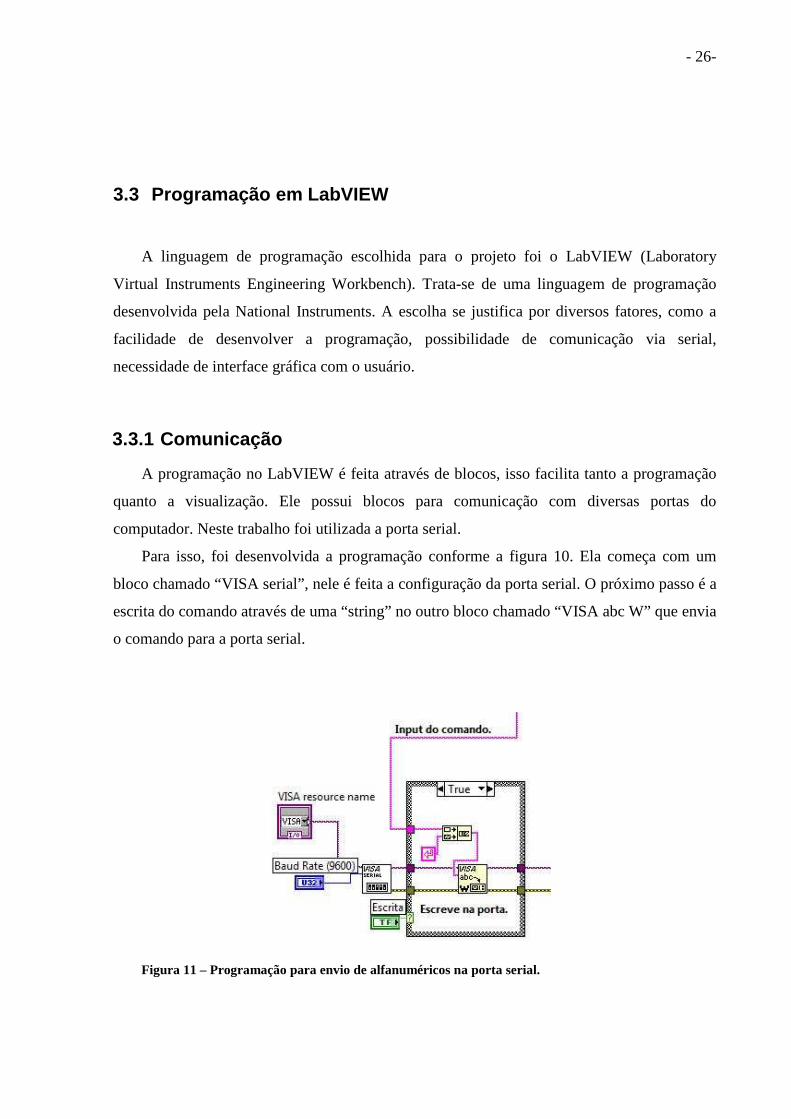
Para isso, foi desenvolvida a programação conforme a figura 10. Ela começa com um
bloco chamado “VISA serial”, nele é feita a configuração da porta serial. O próximo passo é a
escrita do comando através de uma “string” no outro bloco chamado “VISA abc W” que envia
o comando para a porta serial.
Figura 11 – Programação para envio de alfanuméricos na porta serial.
- 27-
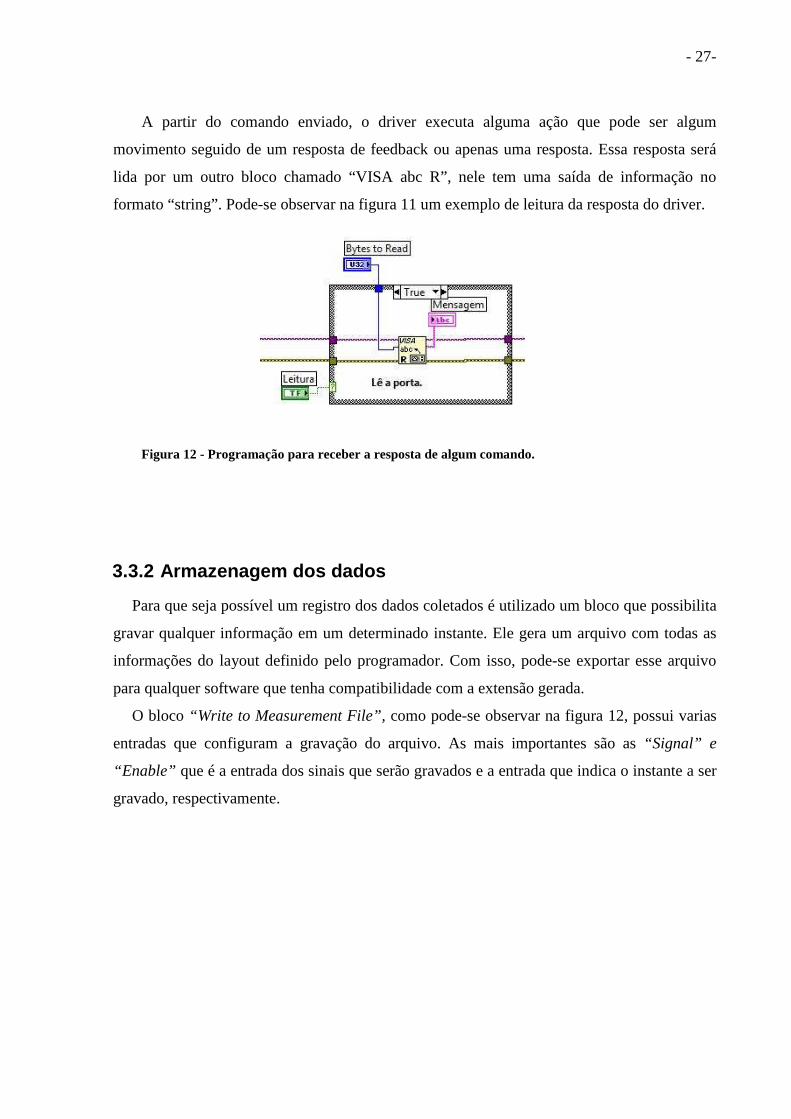
A partir do comando enviado, o driver executa alguma ação que pode ser algum
movimento seguido de um resposta de feedback ou apenas uma resposta. Essa resposta será
lida por um outro bloco chamado “VISA abc R”, nele tem uma saída de informação no
formato “string”. Pode-se observar na figura 11 um exemplo de leitura da resposta do driver.
Figura 12 - Programação para receber a resposta de algum comando.
3.3.2 Armazenagem dos dados
Para que seja possível um registro dos dados coletados é utilizado um bloco que possibilita
gravar qualquer informação em um determinado instante. Ele gera um arquivo com todas as
informações do layout definido pelo programador. Com isso, pode-se exportar esse arquivo
para qualquer software que tenha compatibilidade com a extensão gerada.
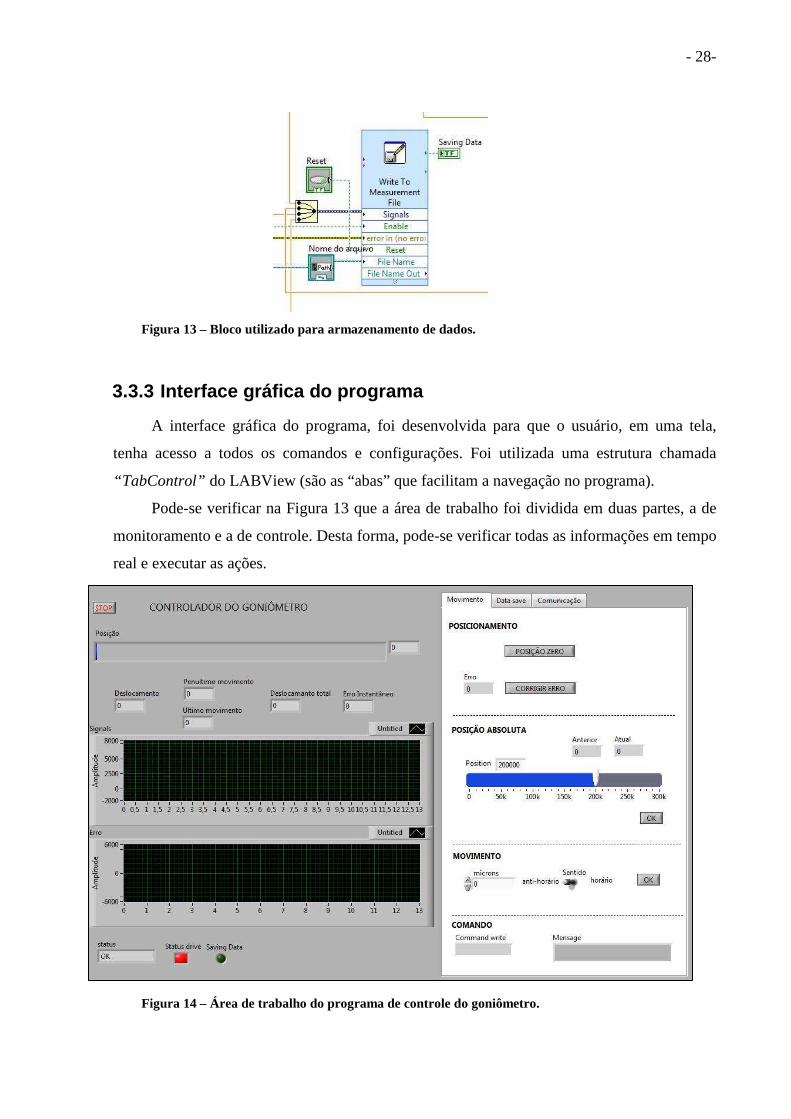
O bloco “Write to Measurement File”, como pode-se observar na figura 12, possui varias
entradas que configuram a gravação do arquivo. As mais importantes são as “Signal” e
“Enable” que é a entrada dos sinais que serão gravados e a entrada que indica o instante a ser
gravado, respectivamente.
- 28-
Figura 13 – Bloco utilizado para armazenamento de dados.
3.3.3 Interface gráfica do programa
A interface gráfica do programa, foi desenvolvida para que o usuário, em uma tela,
tenha acesso a todos os comandos e configurações. Foi utilizada uma estrutura chamada
“TabControl” do LABView (são as “abas” que facilitam a navegação no programa).
Pode-se verificar na Figura 13 que a área de trabalho foi dividida em duas partes, a de
monitoramento e a de controle. Desta forma, pode-se verificar todas as informações em tempo
real e executar as ações.
Figura 14 – Área de trabalho do programa de controle do goniômetro.
- 29-
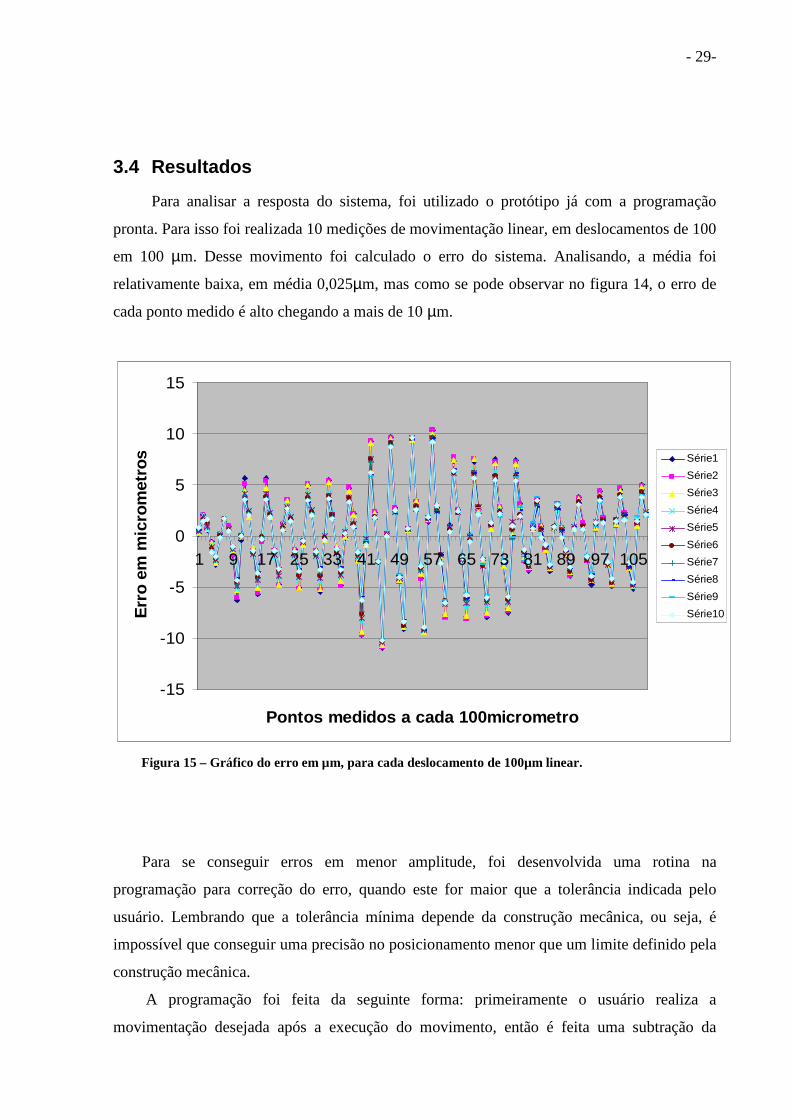
3.4 Resultados
Para analisar a resposta do sistema, foi utilizado o protótipo já com a programação
pronta. Para isso foi realizada 10 medições de movimentação linear, em deslocamentos de 100
em 100 µm. Desse movimento foi calculado o erro do sistema. Analisando, a média foi
relativamente baixa, em média 0,025µm, mas como se pode observar no figura 14, o erro de
cada ponto medido é alto chegando a mais de 10 µm.
-15
-10
-5
0
5
10
15
1 9 17 25 33 41 49 57 65 73 81 89 97 105
Pontos medidos a cada 100micrometro
Err
o em
mic
rom
etro
s
Série1
Série2
Série3
Série4
Série5
Série6
Série7
Série8
Série9
Série10
Figura 15 – Gráfico do erro em µm, para cada deslocamento de 100µm linear.
Para se conseguir erros em menor amplitude, foi desenvolvida uma rotina na
programação para correção do erro, quando este for maior que a tolerância indicada pelo
usuário. Lembrando que a tolerância mínima depende da construção mecânica, ou seja, é
impossível que conseguir uma precisão no posicionamento menor que um limite definido pela
construção mecânica.
A programação foi feita da seguinte forma: primeiramente o usuário realiza a
movimentação desejada após a execução do movimento, então é feita uma subtração da
- 30-
posição que a mesa móvel está fisicamente e a posição onde ela deveria estar. Desta forma se
tem o erro naquele instante.
O erro é analisado e caso seja maior que a tolerância, então é realizada a correção. Na
correção é feito um movimento de 100µm para um sentido oposto ao movimento. Aguarda-se
500mili segundos e então retorna-se a mesa a distância calculada para corrigir o erro no outro
sentido, quantas vezes for preciso.
Essa manobra é realizada na tentativa de amenizar o erro causado pela folga que existe na
rosca do parafuso micrométrico. Ele retorna no sentido oposto ao movimento e depois é
posicionado corretamente, dessa forma esse efeito é amenizado.
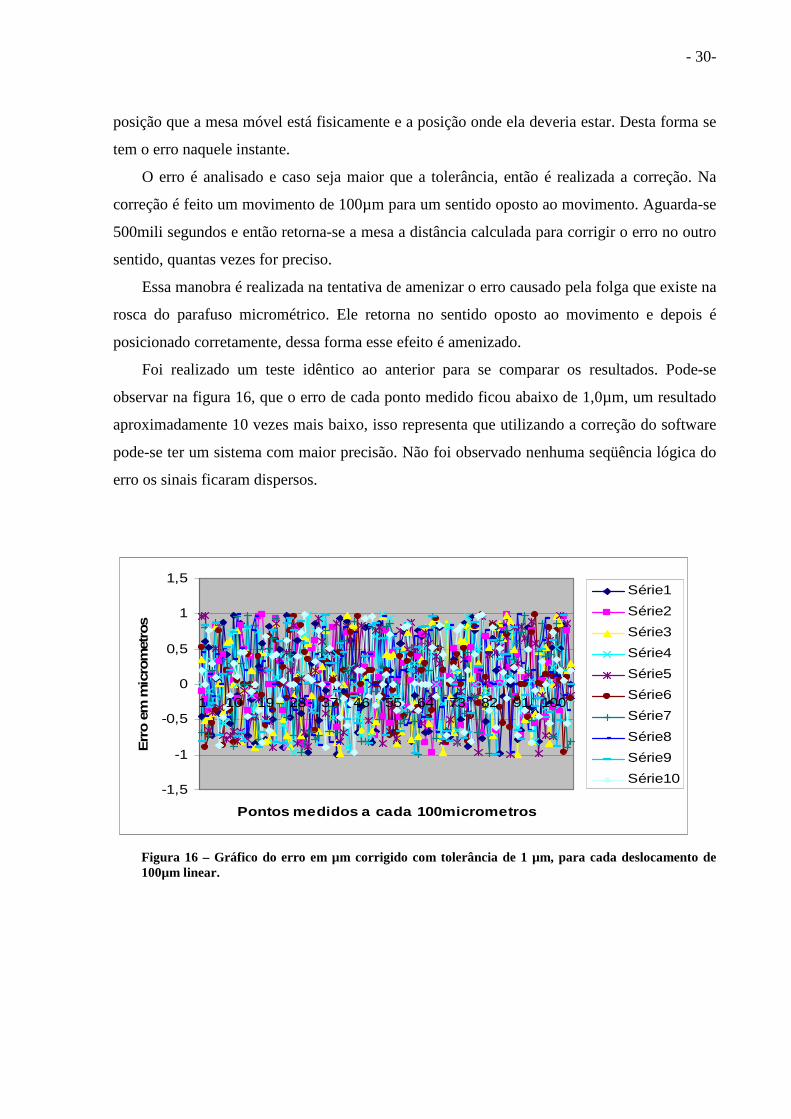
Foi realizado um teste idêntico ao anterior para se comparar os resultados. Pode-se
observar na figura 16, que o erro de cada ponto medido ficou abaixo de 1,0µm, um resultado
aproximadamente 10 vezes mais baixo, isso representa que utilizando a correção do software
pode-se ter um sistema com maior precisão. Não foi observado nenhuma seqüência lógica do
erro os sinais ficaram dispersos.
-1,5
-1
-0,5
0
0,5
1
1,5
1 10 19 28 37 46 55 64 73 82 91 100
Pontos medidos a cada 100micrometros
Erro
em m
icro
met
ros
Série1
Série2
Série3
Série4
Série5
Série6
Série7
Série8
Série9
Série10
Figura 16 – Gráfico do erro em µm corrigido com tolerância de 1 µm, para cada deslocamento de 100µm linear.
- 31-
4 CONCLUSÃO
A proposta do trabalho foi desenvolver a automação do goniômetro utilizado nas linhas
de luz do LNLS. Neste trabalho foi realizado a adaptação dos desenhos 3D, montagem de
uma bancada de teste e programação em LABView.
Foi possível a comunicação entre o encoder, drive e o computador. A programação foi
feita de tal forma que se pode garantir por intermédios de medidas coletadas em tempo real a
posição da mesa móvel. Desta forma possibilitou a correção de qualquer erro fora da
tolerância mecânica do equipamento.
Pode-se concluir então que foi atingido o objetivo de automação inicialmente proposto,
esse trabalho foi realizado em um protótipo linear, porém o mesmo princípio pode ser
aplicado também a movimentos angulares, que é o caso do goniômetro com a melhoria na
precisão do equipamento, como exposto tecnicamente nos resultados.
- 32-
4.1 Extensões
O desenho realizado foi executado a partir do último protótipo fabricado no LNLS, para
atingir uma melhor precisão mecânica, como foi constatado em relatório interno do LNLS,
deve-se utilizar engrenagens comerciais calibradas e fabricação do rolamento com arames.
Com isso o goniômetro terá uma construção mecânica com maior precisão, permitindo que
com a automação, atinja níveis de precisão de equipamentos comerciais.
Para obter equipamento proposto no inicio deste projeto, deve-se primeiramente
detalhar o desenho com as modificações proposta nesse trabalho. Fabricar as peças, comprar
os componentes de precisão e montar o protótipo.
Com a parte mecânica do protótipo montado, as instalações devem seguir a proposta
deste trabalho. E a partir daí é necessário adaptar o programa para controlar e monitorar o
goniômetro.
A programação LABView, realizada nesse trabalho está contemplando as funções
básicas de movimentações, configurações e monitoramento do movimento. A programação
juntamente com os comandos do driver, permite desenvolver funções mais complexas que
podem ser funcionais para o usuário que utilizará do goniômetro.
O programa foi desenvolvido para controlar o motor e calcular o movimento. De acordo
com a rotação corresponderá um movimento linear, através de uma relação conhecida do
parafuso micrométrico. No caso do goniômetro terá a relação entre a rosca sem fim e a coroa.
Essa entre outras modificações permitirá que o programa controle o goniômetro.

- 33-
Referências Bibliográficas
[1]BORTNYANSKY,A.; KLOPENKOV, M. M.; PAVLOVETS, M. S. Microprocessor
Controlled Four-Axis Goniometer. Efremov Research Institute of Electrophysical Apparatus,
Petersburg, Russia, 1996.
[2]http://upload.wikimedia.org/wikipedia/commons/6/60/Sch%C3%A9ma_de_principe_du_s
ynchrotron.jpg. Acesso em 24/05/2008.
[3]http://upload.wikimedia.org/wikipedia/commons/4/4a/Synchrotron_radiation.jpg Acesso
em 21/09/2008.
[4]http://www.canalciencia.ibict.br/pesquisas/pesquisa.php?ref_pesquisa=92. Acesso em
24/05/2008.
[5]www.coinfo.cefetpb.edu.br/professor/leonidas/irc/apostilas/comun_serial.pdf Acesso em
20/06/2008.
[6]http://www2.eletronica.org/artigos/outros/estudo-do-motor-de-passo-e-seu-controle-digital.
Acesso em 08/06/2008
[7]MicroE Systems DS-M3000 Rev E © 2006 Disponível via URL em:
www.microesys.com Acesso em 10/05/2008.
[8]LNLS, Laboratório Nacional de Luz Sincrotron. Relatório interno do desenvolvimento de
um goniômetro para as linhas de luz, Grupo de Projetos, 2007.
[9]LNLS, Laboratório Nacional de Luz Síncrotron. URL www.lnls.br. Acesso em
15/05/2008.
[10]THOMAZINI, Daniel; ALBUQUERQUE, Pedro U. B. de. Sensores industriais:
fundamentos e aplicações. 4. ed., rev. São Paulo: Érica, 2007 220 p.