cvpr tutorial final
TRANSCRIPT
MACHINE VISION GROUP
TUTORIAL
CVPR 2011
June 24, 2011
Image and Video Description with Local Binary Pattern
Variants
Prof. Matti Pietikäinen, Prof. Janne Heikkilä{mkp,jth}@ee.oulu.fi
Machine Vision Group
University of Oulu, Finland
http://www.cse.oulu.fi/MVG/
MACHINE VISION GROUP
Texture is an important characteristic of images and videos
MACHINE VISION GROUP
Contents
1. Introduction to local binary patterns in spatial and
spatiotemporal domains (30 minutes)
2. Some recent variants of LBP (20 minutes)
3. Local phase quantization (LPQ) operator (50 minutes)
4. Example applications (45 minutes)
5. Summary and some future directions (15 minutes)
MACHINE VISION GROUP
Part 1: Introduction to local binary patterns in spatial and
spatiotemporal domains
Matti Pietikäinen
MACHINE VISION GROUP
Property
Pattern ContrastTransformation
LBP in spatial domain
2-D surface texture is a two dimensional phenomenon characterized by:
spatial structure (pattern)
Thus,
1) contrast is of no interest in gray scale invariant analysis
2) often we need a gray scale and rotation invariant pattern measure
Gray scale no effect
Rotation no effectaffects
affects
?affectsZoom in/out
MACHINE VISION GROUP
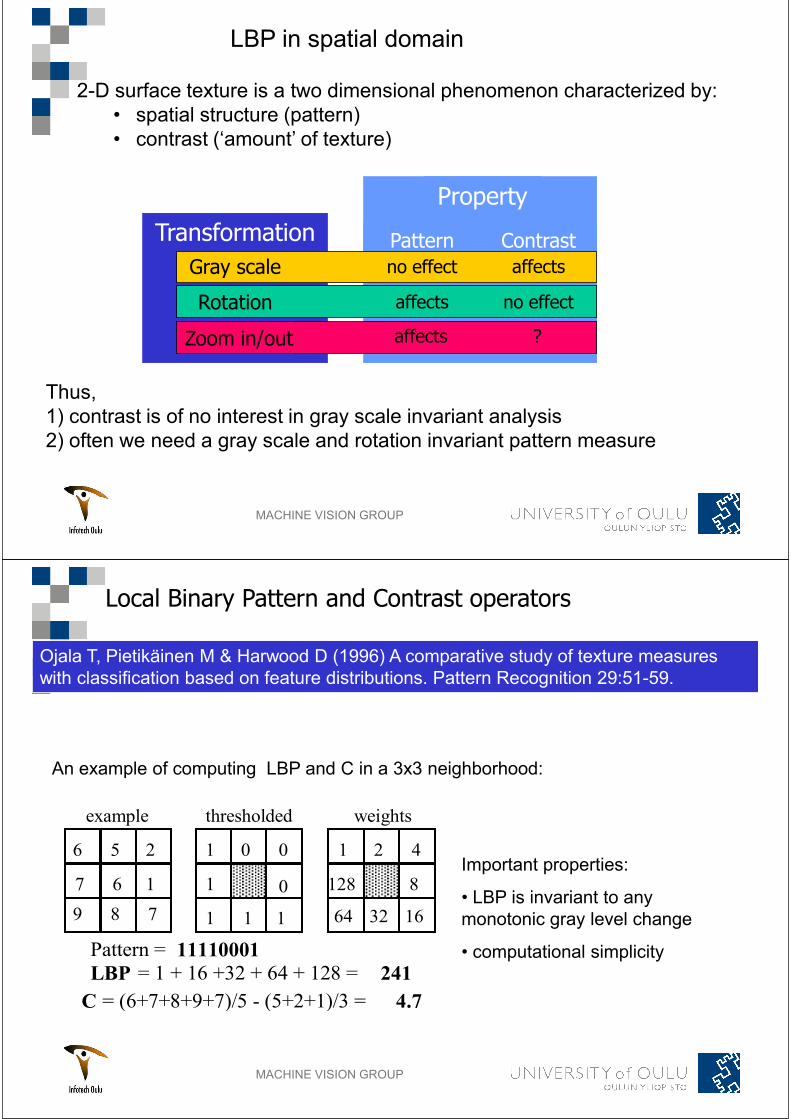
Local Binary Pattern and Contrast operators
Ojala T, Pietikäinen M & Harwood D (1996) A comparative study of texture measures
with classification based on feature distributions. Pattern Recognition 29:51-59.
6 5 2
7 6 1
9 8 7
1
1
1 11
0
00 1 2 4
8
163264
128
example thresholded weights
LBP = 1 + 16 +32 + 64 + 128 = 241
Pattern = 11110001
C = (6+7+8+9+7)/5 - (5+2+1)/3 = 4.7
An example of computing LBP and C in a 3x3 neighborhood:
Important properties:
LBP is invariant to any
monotonic gray level change
computational simplicity

MACHINE VISION GROUP
- arbitrary circular neighborhoods
- uniform patterns
- multiple scales
- rotation invariance
- gray scale variance as contrast measure
Ojala T, Pietikäinen M & Mäenpää T (2002) Multiresolution gray-scale and rotation
invariant texture classification with Local Binary Patterns. IEEE Transactions on Pattern
Analysis and Machine Intelligence 24(7):971-987.
Multiscale LBP
MACHINE VISION GROUP
70
51
7062
83
65
78
47
80
-19
0-8
13
-5
8
-23
10
0
10
1
0
1
0
1
1. Sample 2. Difference 3. Threshold
1*1 + 1*2 + 1*4 + 1*8 + 0*16 + 0*32 + 0*64 + 0*128 = 15
4. Multiply by powers of two and sum
MACHINE VISION GROUP
An example of LBP image and histogram
MACHINE VISION GROUP
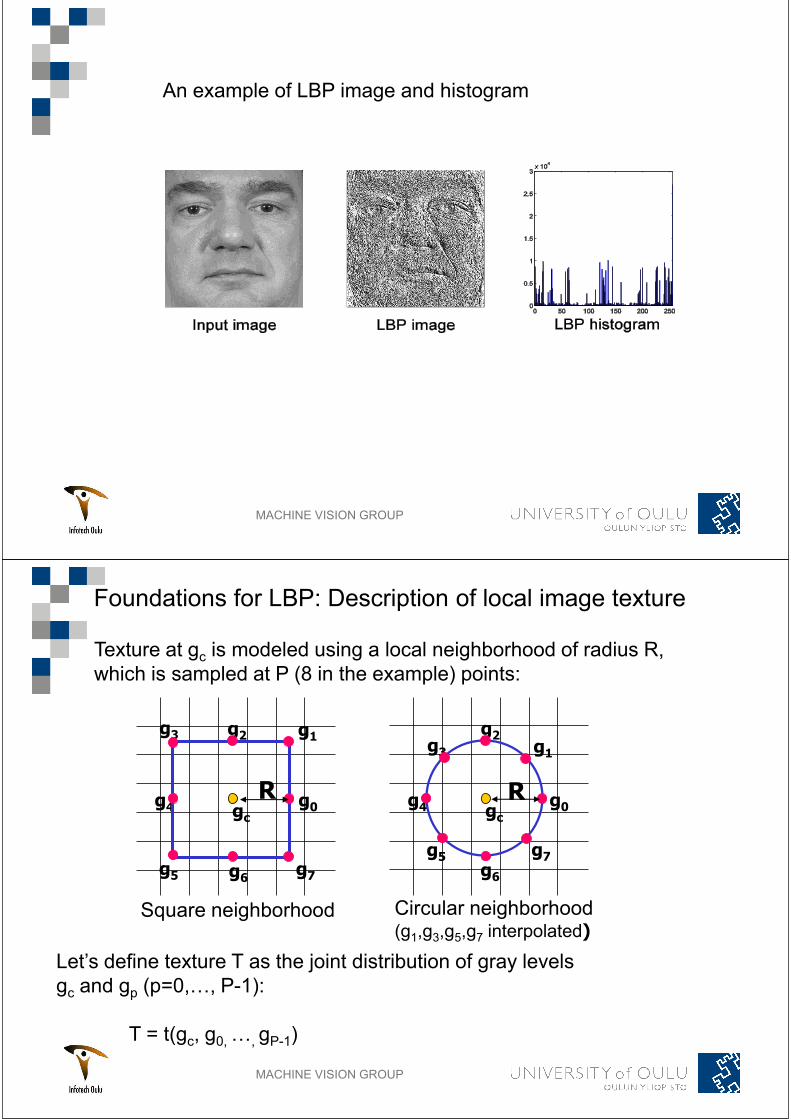
gc and gp -1):
T = t(gc, g0, , gP-1)
Circular neighborhood(g1,g3,g5,g7 interpolated)
gc
R g0
g2g1
g4
g3
g6
g5 g7
gc
g0
g2 g1
g4
g3
g6g5 g7
R
Texture at gc is modeled using a local neighborhood of radius R,
which is sampled at P (8 in the example) points:
Square neighborhood
Foundations for LBP: Description of local image texture
MACHINE VISION GROUP
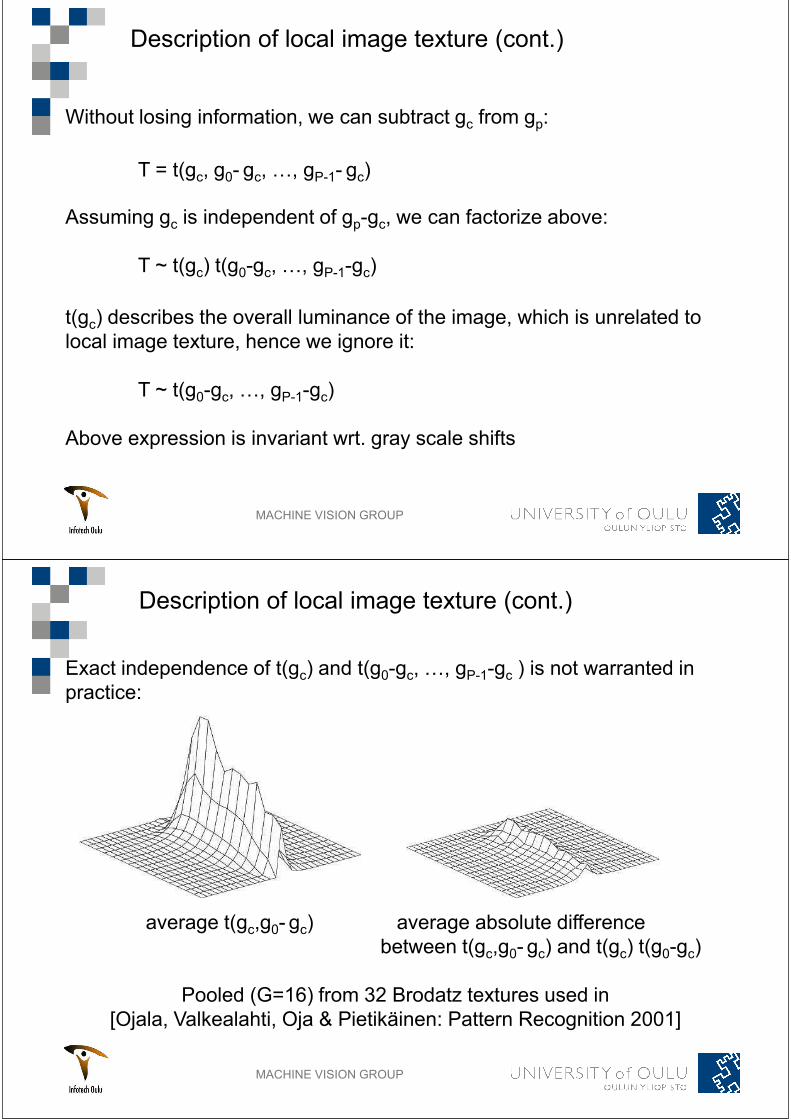
Without losing information, we can subtract gc from gp:
T = t(gc, g0- gc P-1- gc)
Assuming gc is independent of gp-gc, we can factorize above:
T ~ t(gc) t(g0-gc P-1-gc)
t(gc) describes the overall luminance of the image, which is unrelated to
local image texture, hence we ignore it:
T ~ t(g0-gc P-1-gc)
Above expression is invariant wrt. gray scale shifts
Description of local image texture (cont.)
MACHINE VISION GROUP
average t(gc,g0- gc) average absolute difference
between t(gc,g0- gc) and t(gc) t(g0-gc)
Pooled (G=16) from 32 Brodatz textures used in
[Ojala, Valkealahti, Oja & Pietikäinen: Pattern Recognition 2001]
Exact independence of t(gc) and t(g0-gc P-1-gc ) is not warranted in
practice:
Description of local image texture (cont.)
MACHINE VISION GROUP
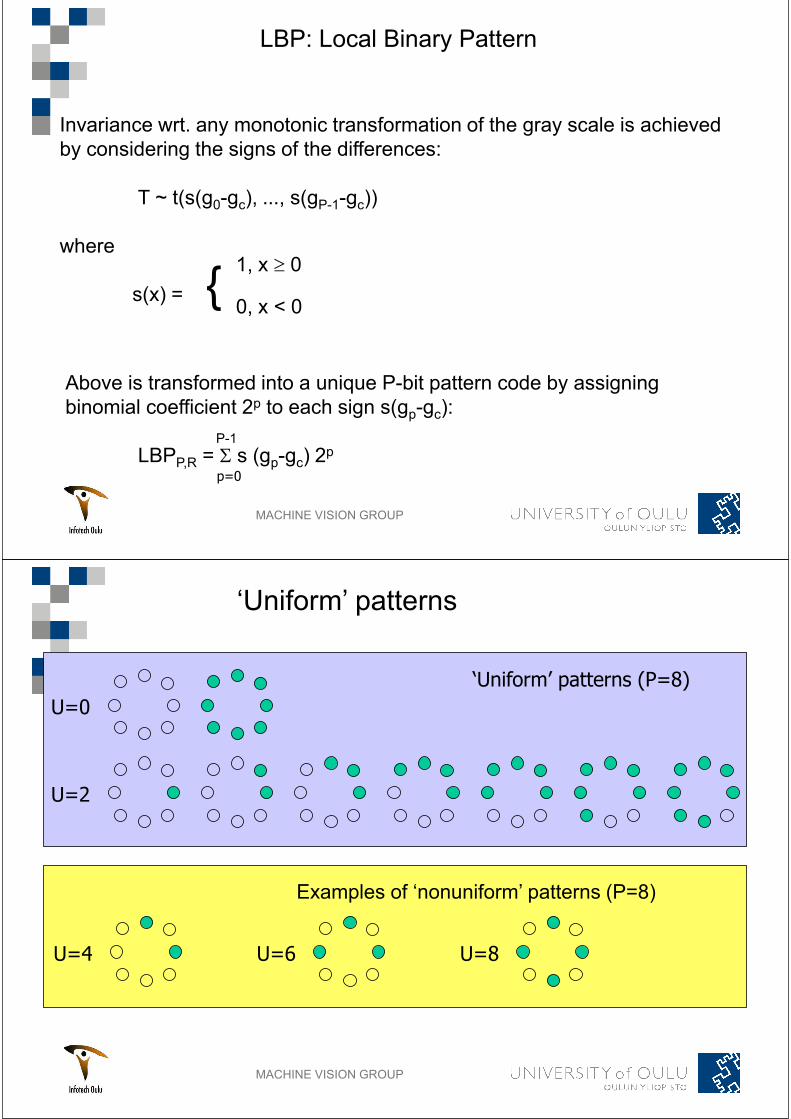
Invariance wrt. any monotonic transformation of the gray scale is achieved
by considering the signs of the differences:
T ~ t(s(g0-gc), , s(gP-1-gc))
where
s(x) = {1, x 0
0, x < 0
Above is transformed into a unique P-bit pattern code by assigning
binomial coefficient 2p to each sign s(gp-gc):
P-1
LBPP,R = s (gp-gc) 2p
p=0
LBP: Local Binary Pattern
MACHINE VISION GROUP
U=2
U=0
U=4 U=6 U=8
MACHINE VISION GROUP
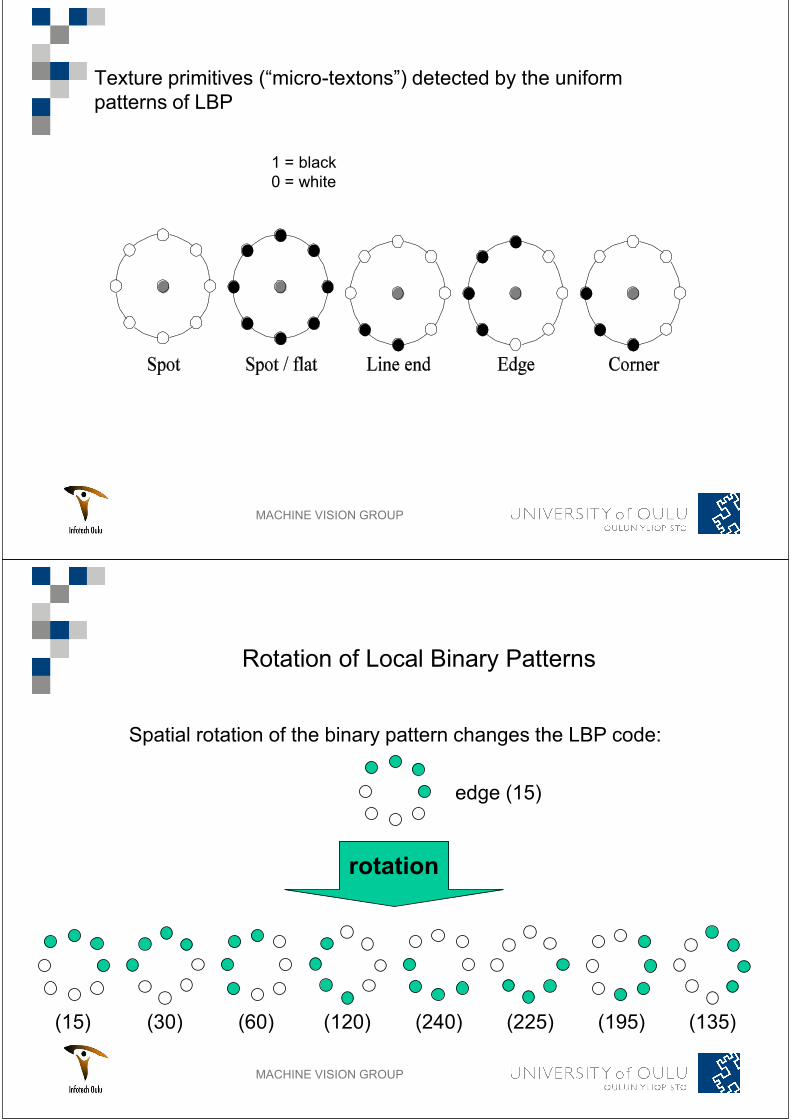
-
patterns of LBP
1 = black
0 = white
MACHINE VISION GROUP
Rotation of Local Binary Patterns
edge (15)
(30) (60) (120) (240) (225) (195) (135)(15)
rotation
Spatial rotation of the binary pattern changes the LBP code:
MACHINE VISION GROUP
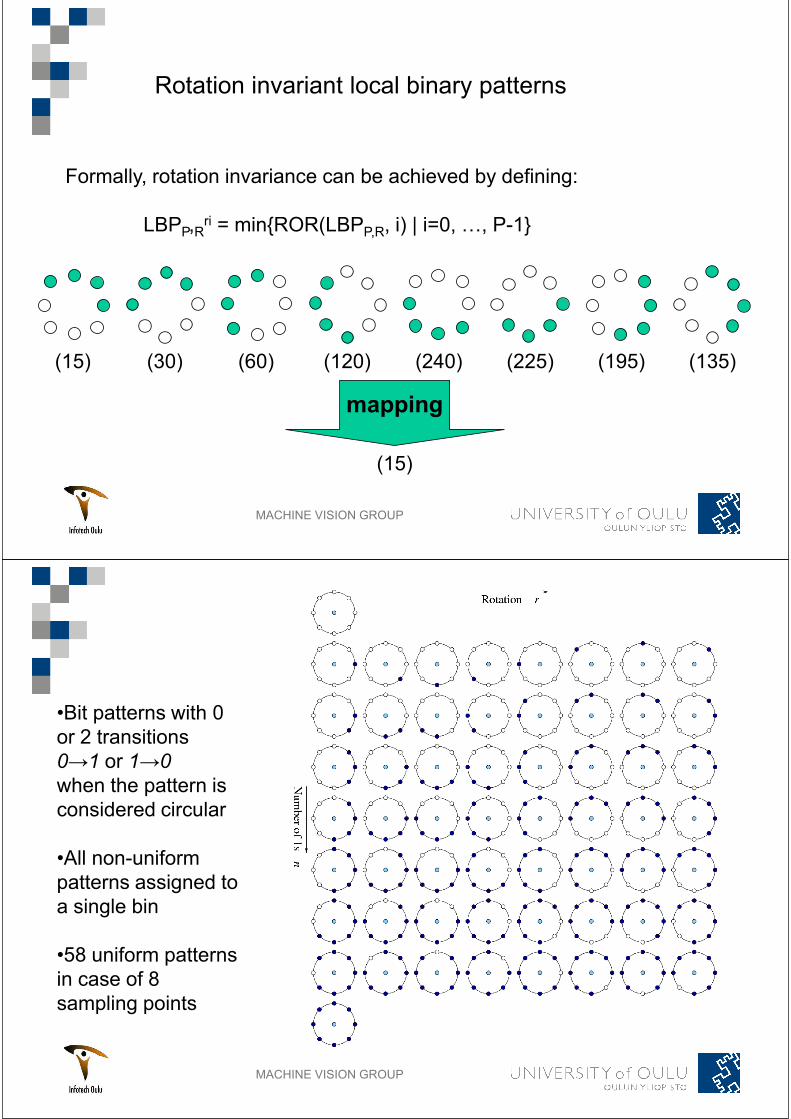
Rotation invariant local binary patterns
Formally, rotation invariance can be achieved by defining:
LBPP,Rri = min{ROR(LBPP,R -1}
(15) (30) (60) (120) (240) (225) (195) (135)
mapping
(15)
MACHINE VISION GROUP
Uniform
patterns
Bit patterns with 0
or 2 transitions
0 1 or 1 0
when the pattern is
considered circular
All non-uniform
patterns assigned to
a single bin
58 uniform patterns
in case of 8
sampling points
MACHINE VISION GROUP
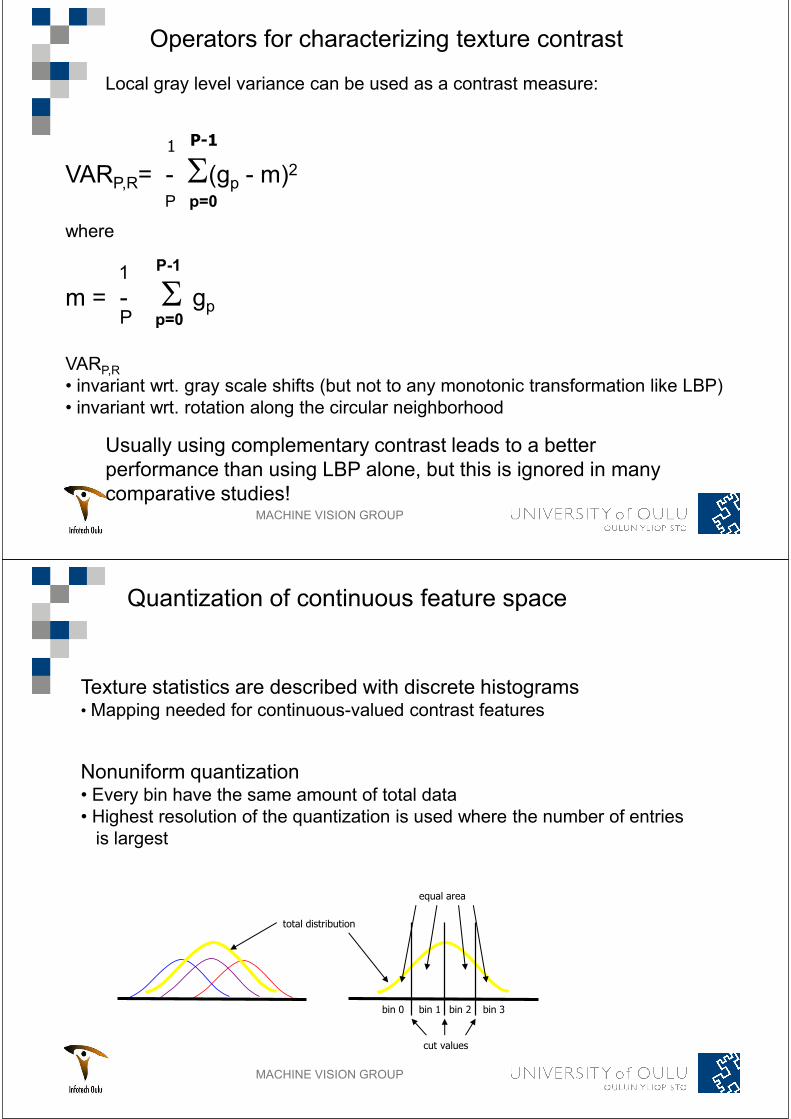
1 P-1
VARP,R= - (gp - m)2
P p=0
where
1 P-1
m = - gpP p=0
VARP,R
invariant wrt. gray scale shifts (but not to any monotonic transformation like LBP)
invariant wrt. rotation along the circular neighborhood
Operators for characterizing texture contrast
Local gray level variance can be used as a contrast measure:
Usually using complementary contrast leads to a better
performance than using LBP alone, but this is ignored in many
comparative studies!
MACHINE VISION GROUP
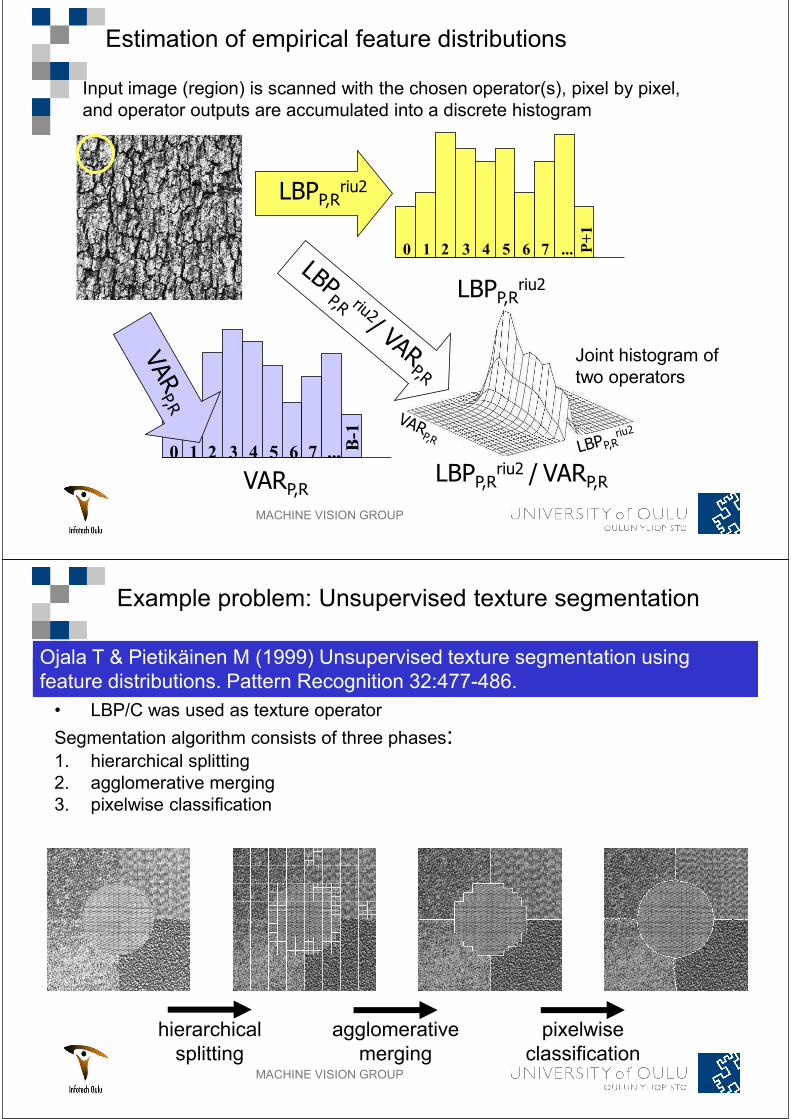
Quantization of continuous feature space
bin 0 bin 1 bin 2 bin 3
cut values
equal area
total distribution
Texture statistics are described with discrete histogramsMapping needed for continuous-valued contrast features
Nonuniform quantizationEvery bin have the same amount of total data
Highest resolution of the quantization is used where the number of entries
is largest
MACHINE VISION GROUP
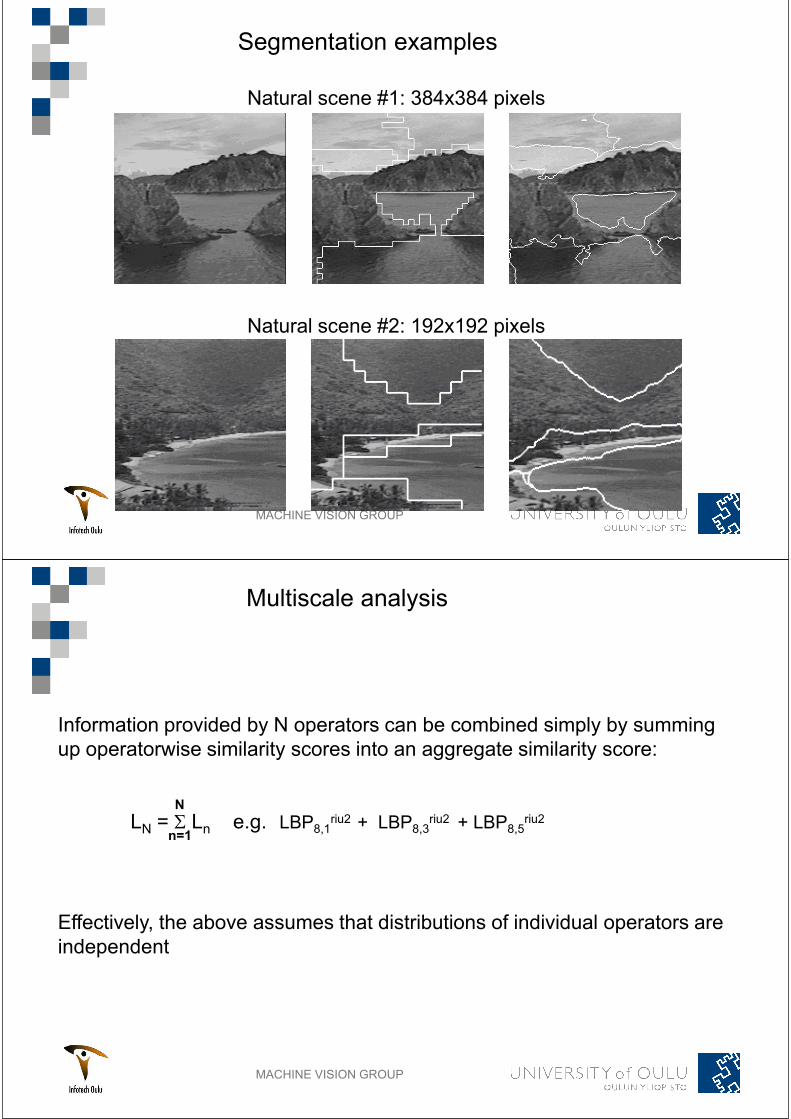
Estimation of empirical feature distributions
0 1 2 3 4 5 6 7 ... B-1
VARP,RLBPP,R
riu2 / VARP,R
LBPP,Rriu2
Joint histogram of
two operators
Input image (region) is scanned with the chosen operator(s), pixel by pixel,
and operator outputs are accumulated into a discrete histogram
LBPP,Rriu2
0 1 2 3 4 5 6 7 ... P+
1
MACHINE VISION GROUP
Example problem: Unsupervised texture segmentation
LBP/C was used as texture operator
Segmentation algorithm consists of three phases:1. hierarchical splitting
2. agglomerative merging
3. pixelwise classification
Ojala T & Pietikäinen M (1999) Unsupervised texture segmentation using
feature distributions. Pattern Recognition 32:477-486.
hierarchical
splitting
agglomerative
merging
pixelwise
classification
MACHINE VISION GROUP
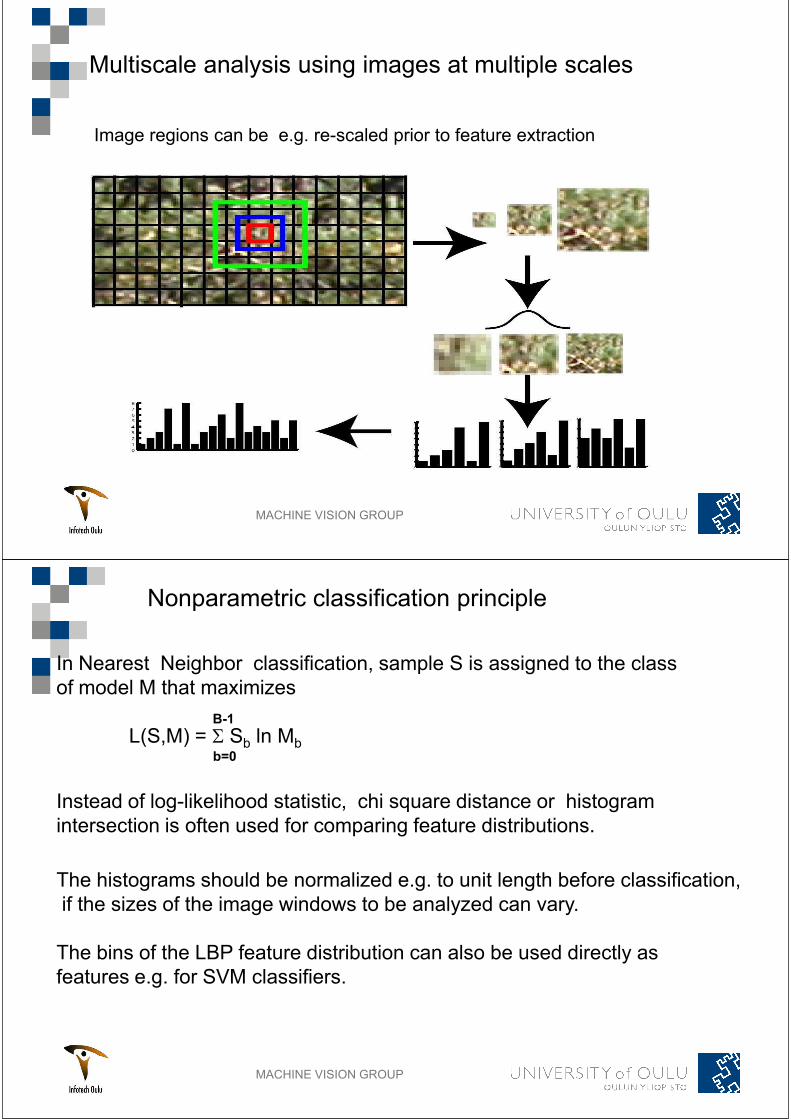
Segmentation examples
Natural scene #2: 192x192 pixels
Natural scene #1: 384x384 pixels
MACHINE VISION GROUP
Multiscale analysis
Information provided by N operators can be combined simply by summing
up operatorwise similarity scores into an aggregate similarity score:
N
LN = Ln e.g. LBP8,1riu2 + LBP8,3
riu2 + LBP8,5riu2
n=1
Effectively, the above assumes that distributions of individual operators are
independent
MACHINE VISION GROUP
Image regions can be e.g. re-scaled prior to feature extraction
Multiscale analysis using images at multiple scales
MACHINE VISION GROUP
Nonparametric classification principle
In Nearest Neighbor classification, sample S is assigned to the class
of model M that maximizes
B-1
L(S,M) = Sb ln Mbb=0
Instead of log-likelihood statistic, chi square distance or histogram
intersection is often used for comparing feature distributions.
The histograms should be normalized e.g. to unit length before classification,
if the sizes of the image windows to be analyzed can vary.
The bins of the LBP feature distribution can also be used directly as
features e.g. for SVM classifiers.
MACHINE VISION GROUP
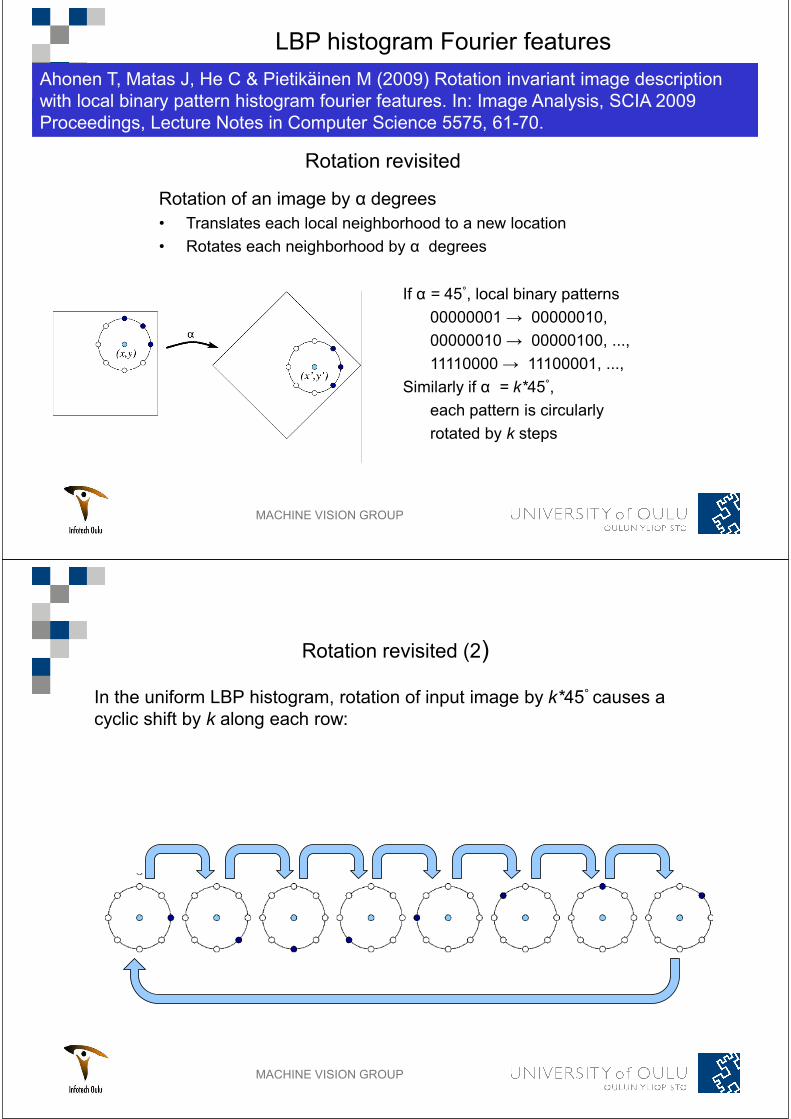
Rotation revisited
Rotation of an image by degrees
Translates each local neighborhood to a new location
Rotates each neighborhood by degrees
LBP histogram Fourier features
Ahonen T, Matas J, He C & Pietikäinen M (2009) Rotation invariant image description
with local binary pattern histogram fourier features. In: Image Analysis, SCIA 2009
Proceedings, Lecture Notes in Computer Science 5575, 61-70.
If = 45°, local binary patterns
00000001 00000010,
00000010 00000100, ...,
11110000 11100001, ...,
Similarly if = k*45°,
each pattern is circularly
rotated by k steps
MACHINE VISION GROUP
Rotation revisited (2)
In the uniform LBP histogram, rotation of input image by k*45° causes a
cyclic shift by k along each row:
MACHINE VISION GROUP
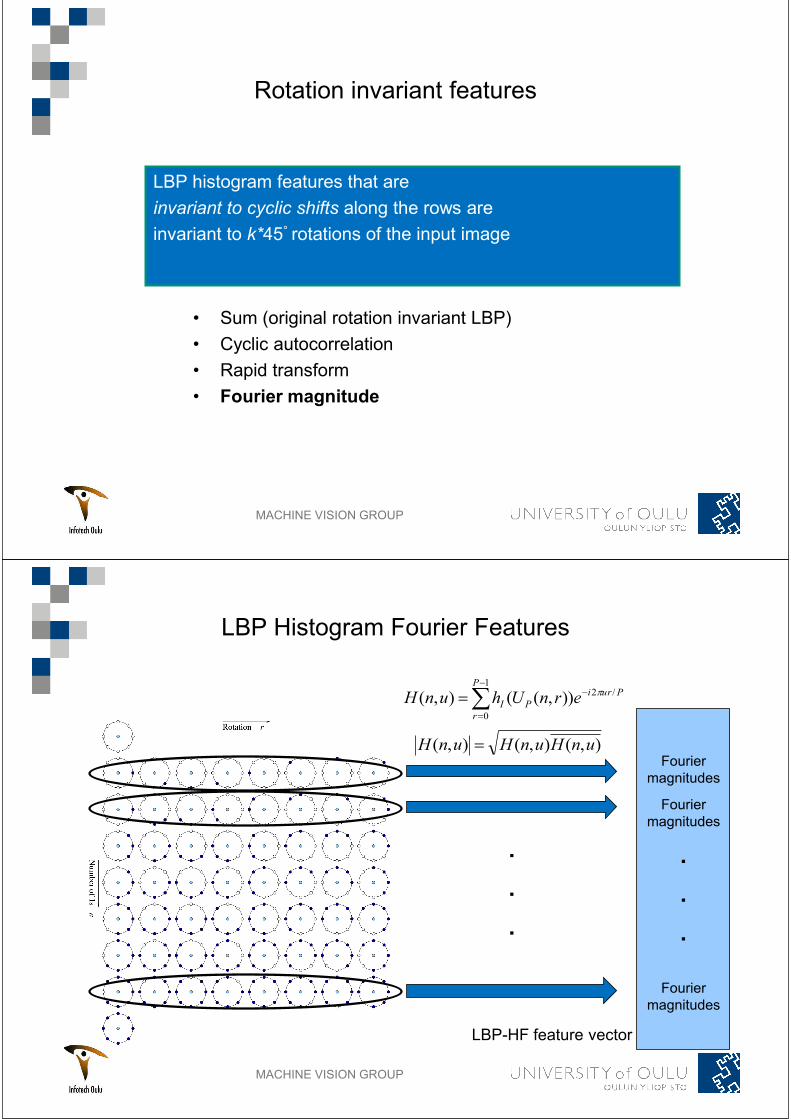
Rotation invariant features
LBP histogram features that are
invariant to cyclic shifts along the rows are
invariant to k*45° rotations of the input image
Sum (original rotation invariant LBP)
Cyclic autocorrelation
Rapid transform
Fourier magnitude
MACHINE VISION GROUP
LBP Histogram Fourier Features
.
.
.
LBP-HF feature vector
.
.
.
Fourier
magnitudes
Fourier
magnitudes
1
0
/2)),((),(P
r
Puri
PI ernUhunH
Fourier
magnitudes
),(),(),( unHunHunH
MACHINE VISION GROUP
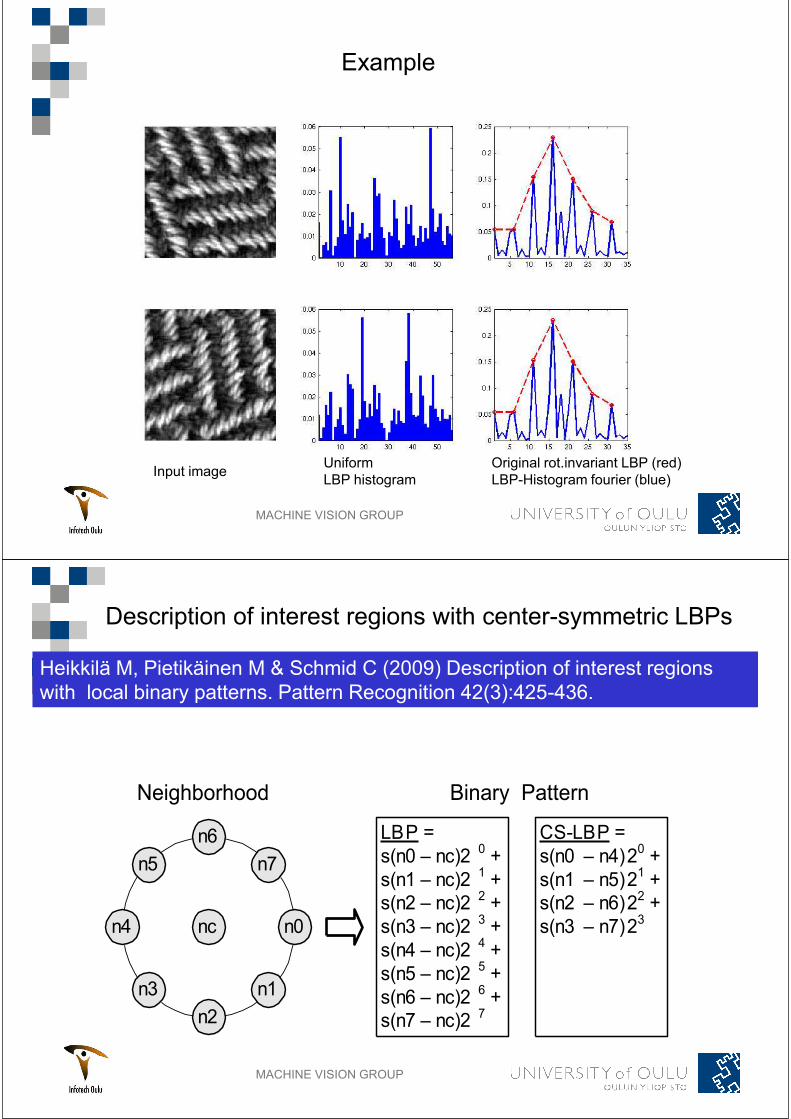
Example
Input imageUniform
LBP histogram
Original rot.invariant LBP (red)
LBP-Histogram fourier (blue)
MACHINE VISION GROUP
Description of interest regions with center-symmetric LBPs
Heikkilä M, Pietikäinen M & Schmid C (2009) Description of interest regions
with local binary patterns. Pattern Recognition 42(3):425-436.
n5
nc
n3 n1
n7
n0n4
n2
n6
Neighborhood
LBP =
s(n0 nc)20
+
s(n1 nc)21
+
s(n2 nc)2 2 +
s(n3 nc)2 3 +
s(n4 nc)24
+
s(n5 nc)25
+
s(n6 nc)26
+
s(n7 nc)2 7
Binary Pattern
CS-LBP =
s(n0 n4)20
+
s(n1 n5)21
+
s(n2 n6)22 +
s(n3 n7)23
MACHINE VISION GROUP
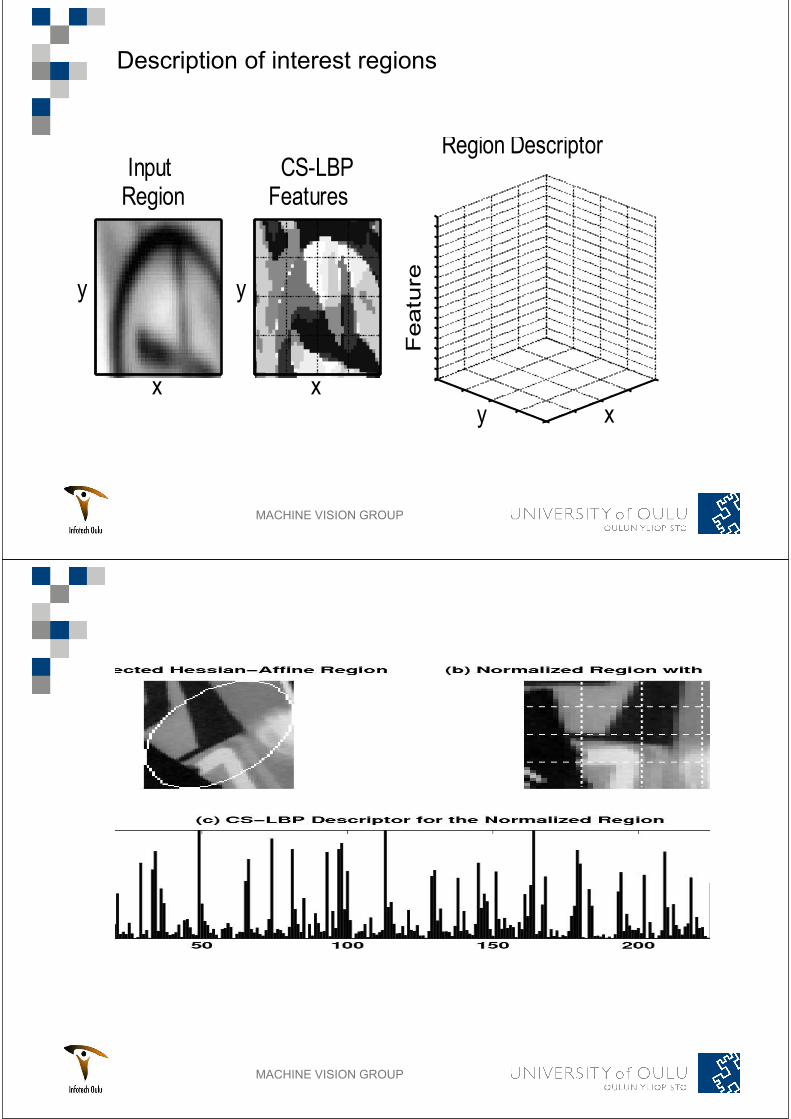
Description of interest regions
InputRegion
x
y
CS-LBPFeatures
x
y
Featu
re
Region Descriptor
xy
MACHINE VISION GROUP
MACHINE VISION GROUP
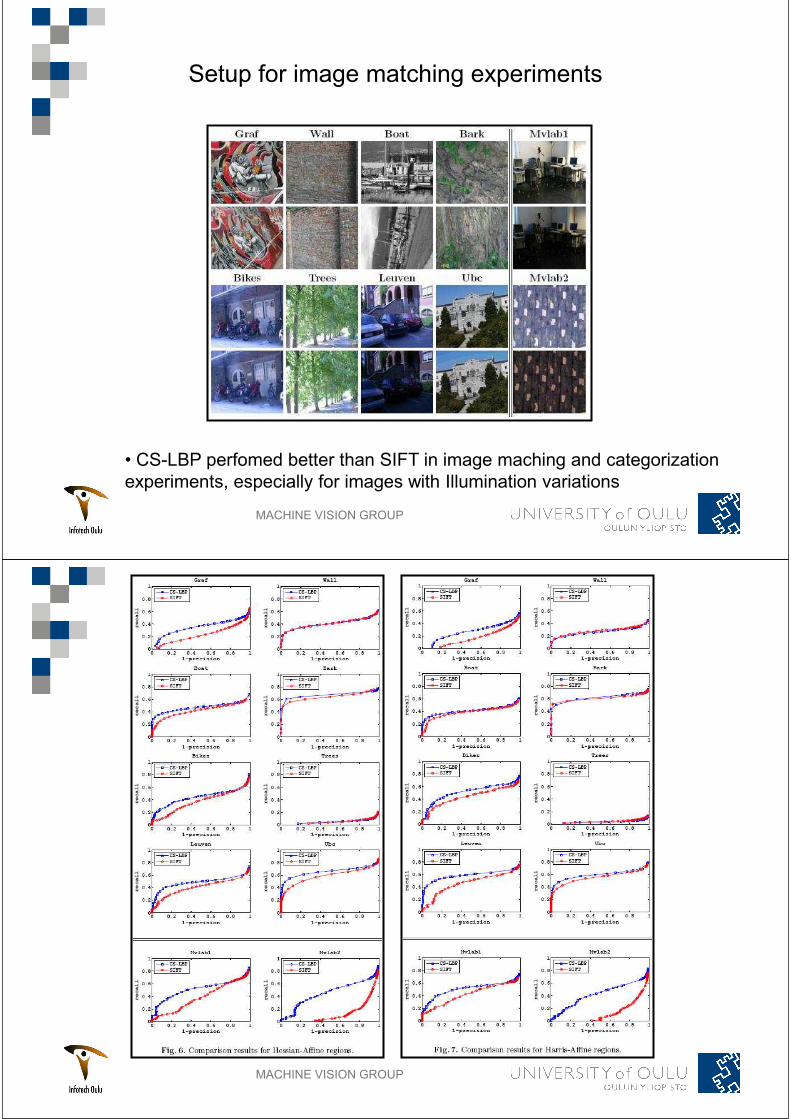
Setup for image matching experiments
CS-LBP perfomed better than SIFT in image maching and categorization
experiments, especially for images with Illumination variations
MACHINE VISION GROUP
MACHINE VISION GROUP
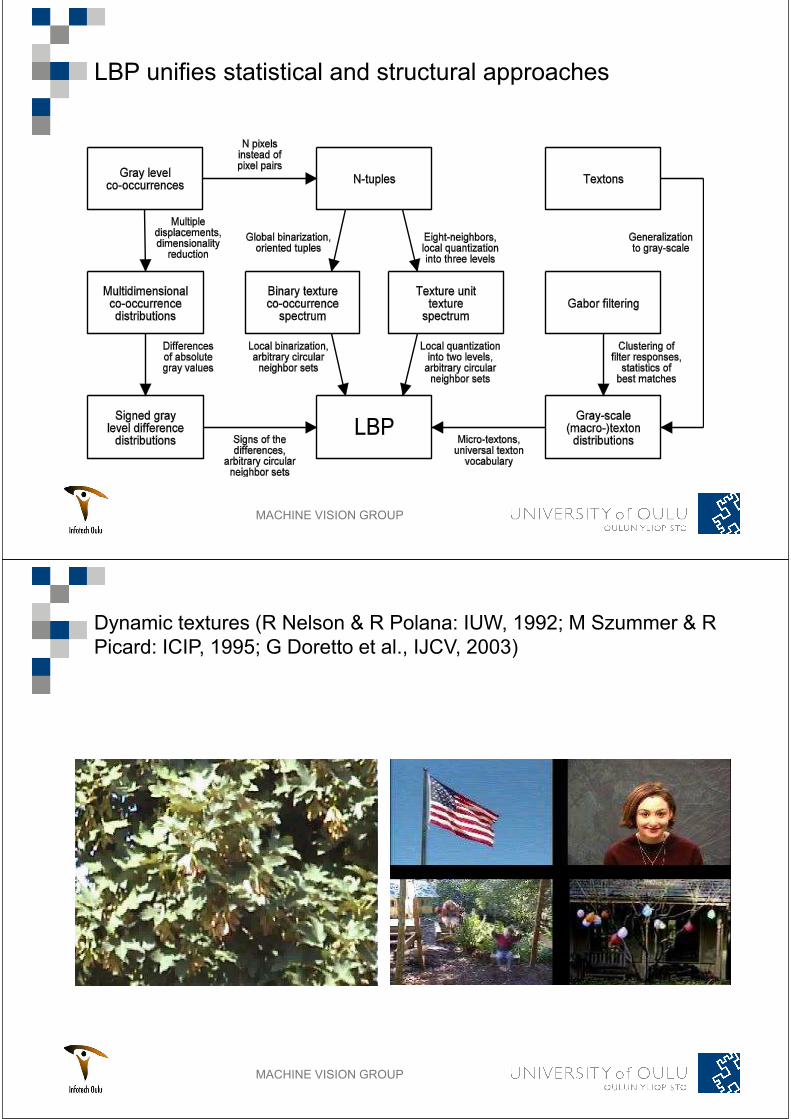
LBP unifies statistical and structural approaches
MACHINE VISION GROUP
Dynamic textures (R Nelson & R Polana: IUW, 1992; M Szummer & R
Picard: ICIP, 1995; G Doretto et al., IJCV, 2003)
MACHINE VISION GROUP
Dynamic texture recognition
Determine the emotional
state ofthe face
Zhao G & Pietikäinen M (2007) Dynamic texture recognition using local binary patterns with an application to facial expressions. IEEE Transactions on Pattern
Analysis and Machine Intelligence 29(6):915-928. (parts of this were earlier
presented at ECCV 2006 Workshop on Dynamical Vision and ICPR 2006)
MACHINE VISION GROUP
Dynamic textures
An extension of texture to the temporal domain
Encompass the class of video sequences that
exhibit some stationary properties in time
Dynamic textures offer a new approach to motion
analysis
- general constraints of motion analysis (i.e. scene is
Lambertian, rigid and static) can be relaxed [Vidal et al.,
CVPR 2005]
MACHINE VISION GROUP
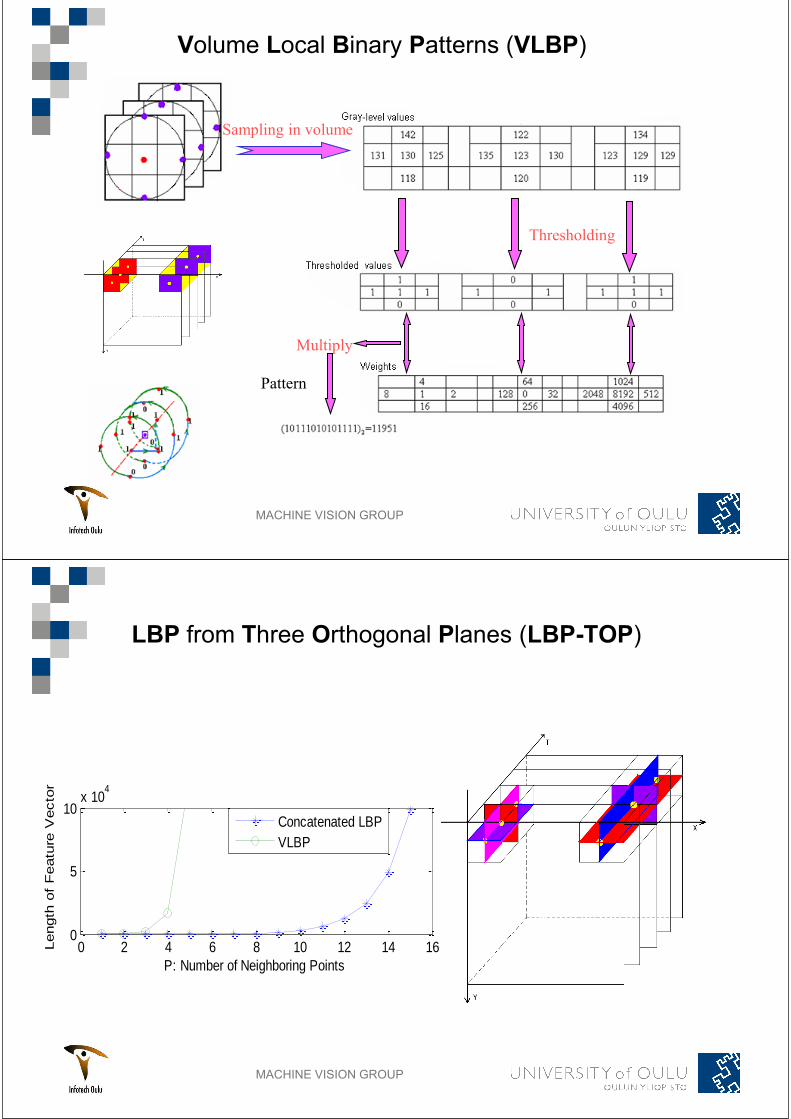
Volume Local Binary Patterns (VLBP)
Sampling in volume
Thresholding
Multiply
Pattern
MACHINE VISION GROUP
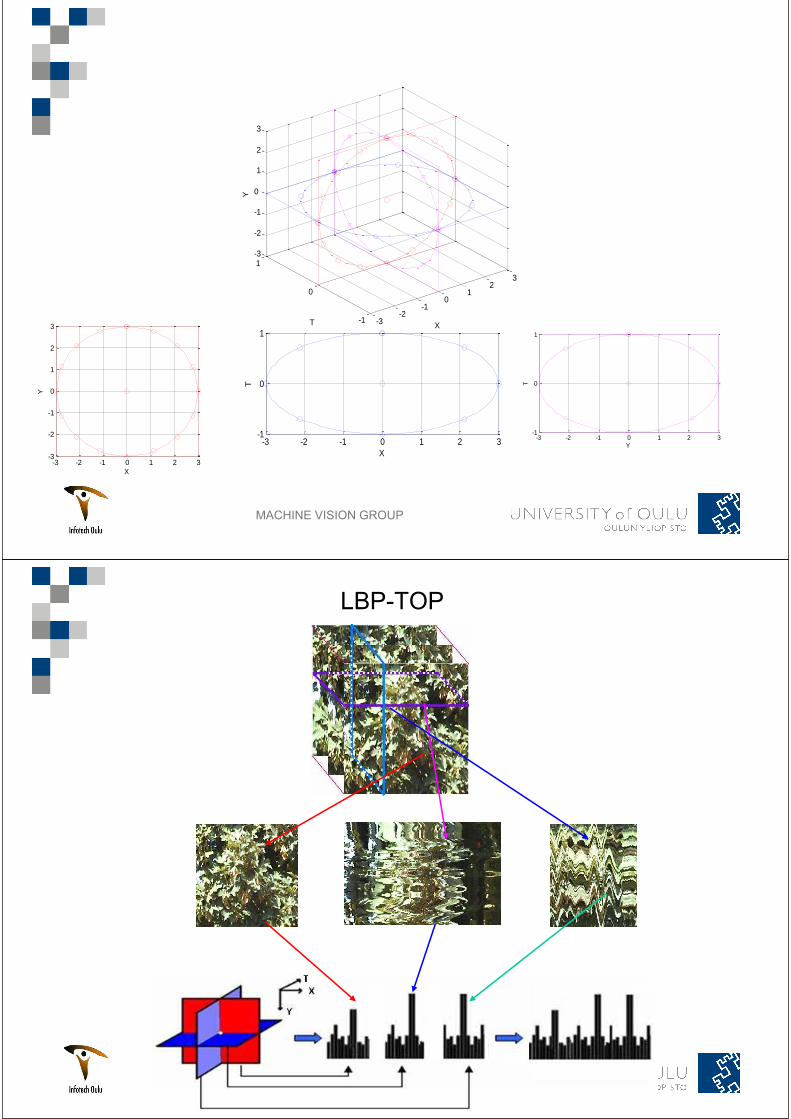
LBP from Three Orthogonal Planes (LBP-TOP)
0 2 4 6 8 10 12 14 160
5
10x 10
4
P: Number of Neighboring Points
Length
of
Featu
re V
ecto
r
Concatenated LBPVLBP
MACHINE VISION GROUP
32
10
-1-2
-3-1
0
1
3
2
1
0
-1
-2
-3
XT
Y
-3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
X
Y
-3 -2 -1 0 1 2 3-1
0
1
X
T
-3 -2 -1 0 1 2 3-1
0
1
Y
T
MACHINE VISION GROUP
LBP-TOP
MACHINE VISION GROUP
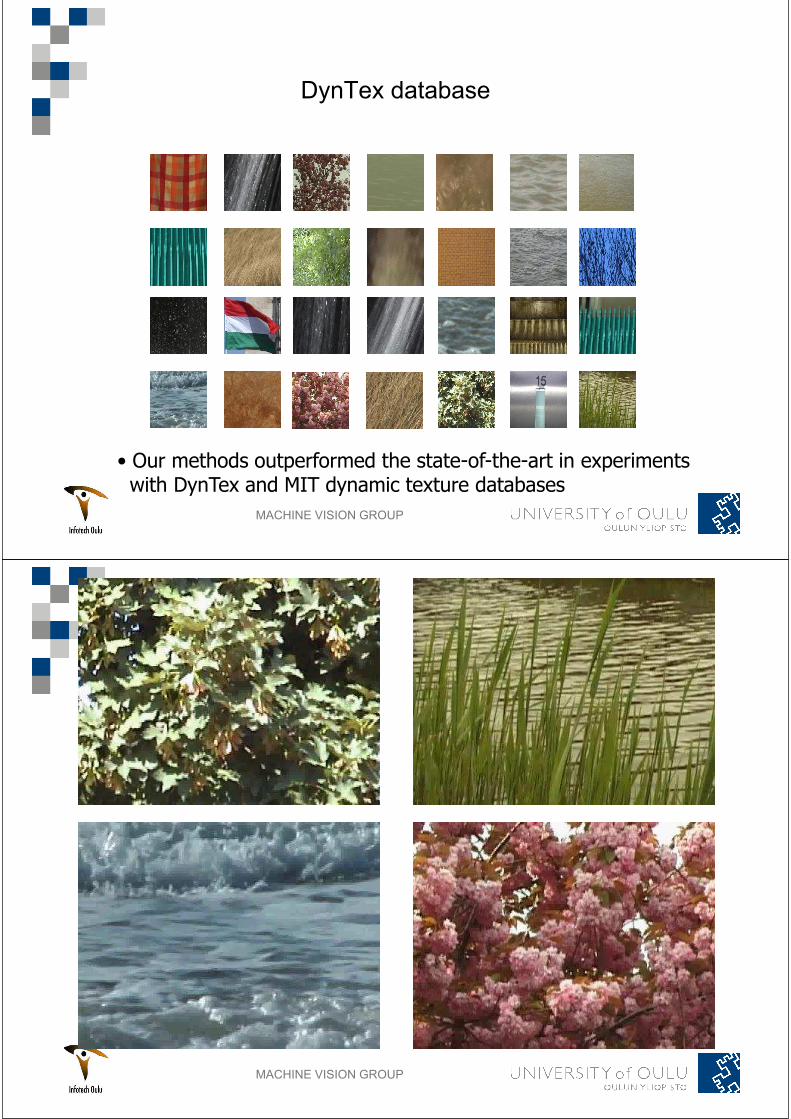
DynTex database
Our methods outperformed the state-of-the-art in experimentswith DynTex and MIT dynamic texture databases
MACHINE VISION GROUP
MACHINE VISION GROUP
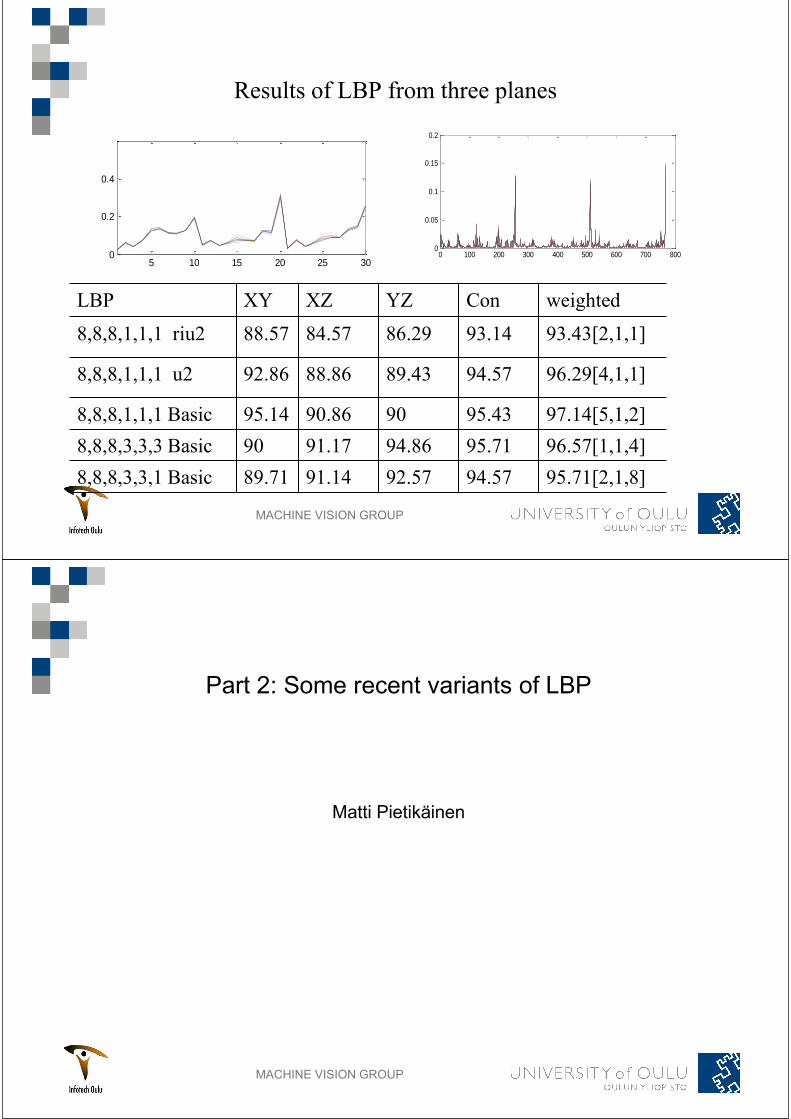
Results of LBP from three planes
5 10 15 20 25 300
0.2
0.4
0 100 200 300 400 500 600 700 8000
0.05
0.1
0.15
0.2
LBP XY XZ YZ Con weighted
8,8,8,1,1,1 riu2 88.57 84.57 86.29 93.14 93.43[2,1,1]
8,8,8,1,1,1 u2 92.86 88.86 89.43 94.57 96.29[4,1,1]
8,8,8,1,1,1 Basic 95.14 90.86 90 95.43 97.14[5,1,2]
8,8,8,3,3,3 Basic 90 91.17 94.86 95.71 96.57[1,1,4]
8,8,8,3,3,1 Basic 89.71 91.14 92.57 94.57 95.71[2,1,8]
MACHINE VISION GROUP
Part 2: Some recent variants of LBP
Matti Pietikäinen
MACHINE VISION GROUP
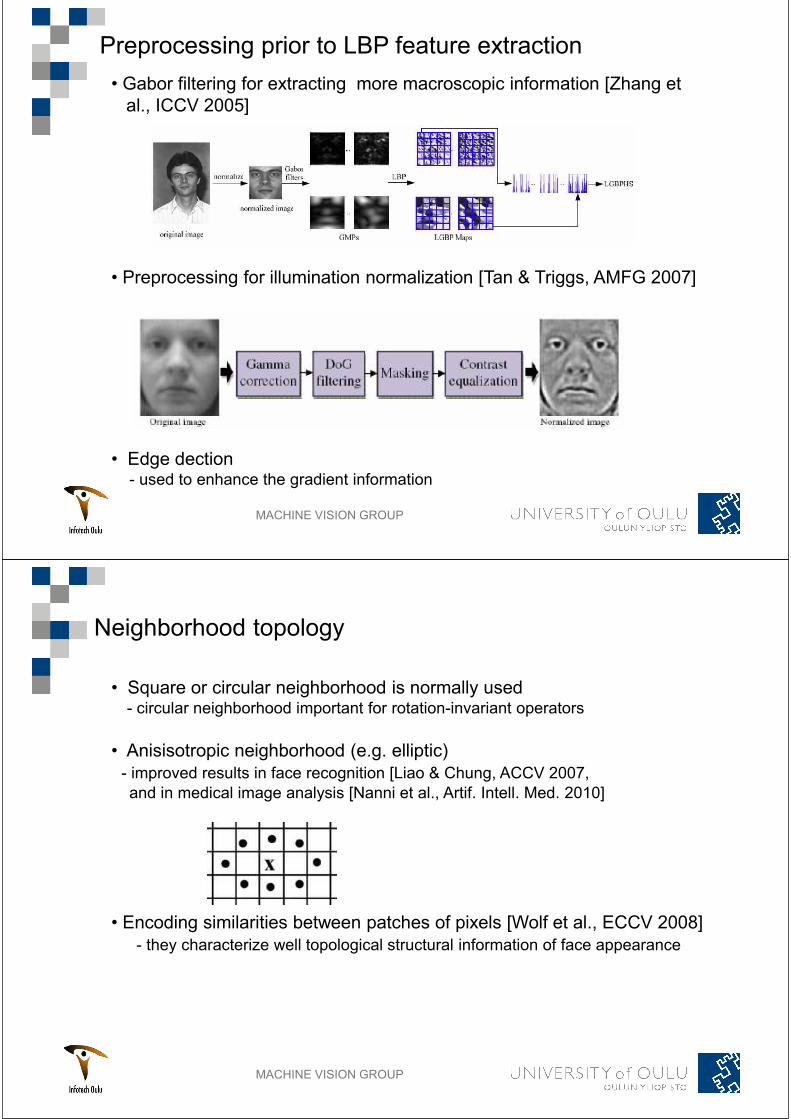
Gabor filtering for extracting more macroscopic information [Zhang et
al., ICCV 2005]
Preprocessing for illumination normalization [Tan & Triggs, AMFG 2007]
Edge dection- used to enhance the gradient information
Preprocessing prior to LBP feature extraction
MACHINE VISION GROUP
Square or circular neighborhood is normally used- circular neighborhood important for rotation-invariant operators
Anisisotropic neighborhood (e.g. elliptic)
- improved results in face recognition [Liao & Chung, ACCV 2007,
and in medical image analysis [Nanni et al., Artif. Intell. Med. 2010]
Encoding similarities between patches of pixels [Wolf et al., ECCV 2008]
- they characterize well topological structural information of face appearance
Neighborhood topology
MACHINE VISION GROUP
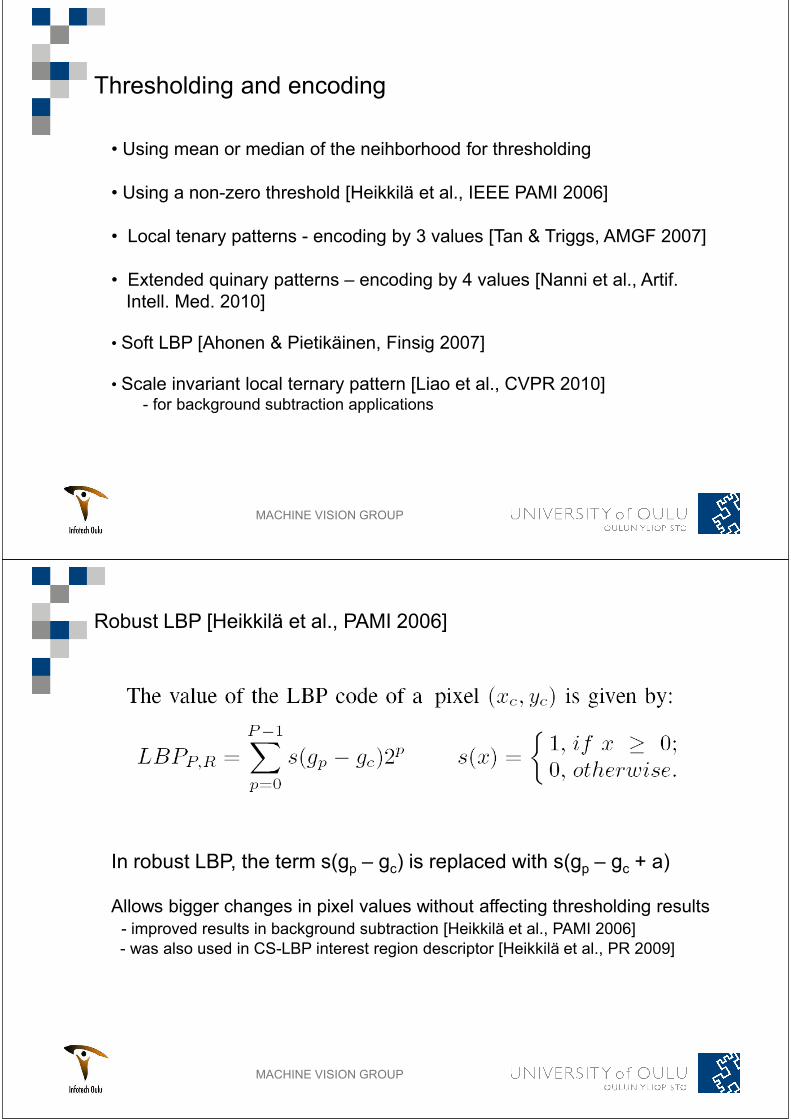
Using mean or median of the neihborhood for thresholding
Using a non-zero threshold [Heikkilä et al., IEEE PAMI 2006]
Local tenary patterns - encoding by 3 values [Tan & Triggs, AMGF 2007]
Extended quinary patterns encoding by 4 values [Nanni et al., Artif.
Intell. Med. 2010]
Soft LBP [Ahonen & Pietikäinen, Finsig 2007]
Scale invariant local ternary pattern [Liao et al., CVPR 2010]- for background subtraction applications
Thresholding and encoding
MACHINE VISION GROUP
Robust LBP [Heikkilä et al., PAMI 2006]
In robust LBP, the term s(gp gc) is replaced with s(gp gc + a)
Allows bigger changes in pixel values without affecting thresholding results
- improved results in background subtraction [Heikkilä et al., PAMI 2006]
- was also used in CS-LBP interest region descriptor [Heikkilä et al., PR 2009]
MACHINE VISION GROUP
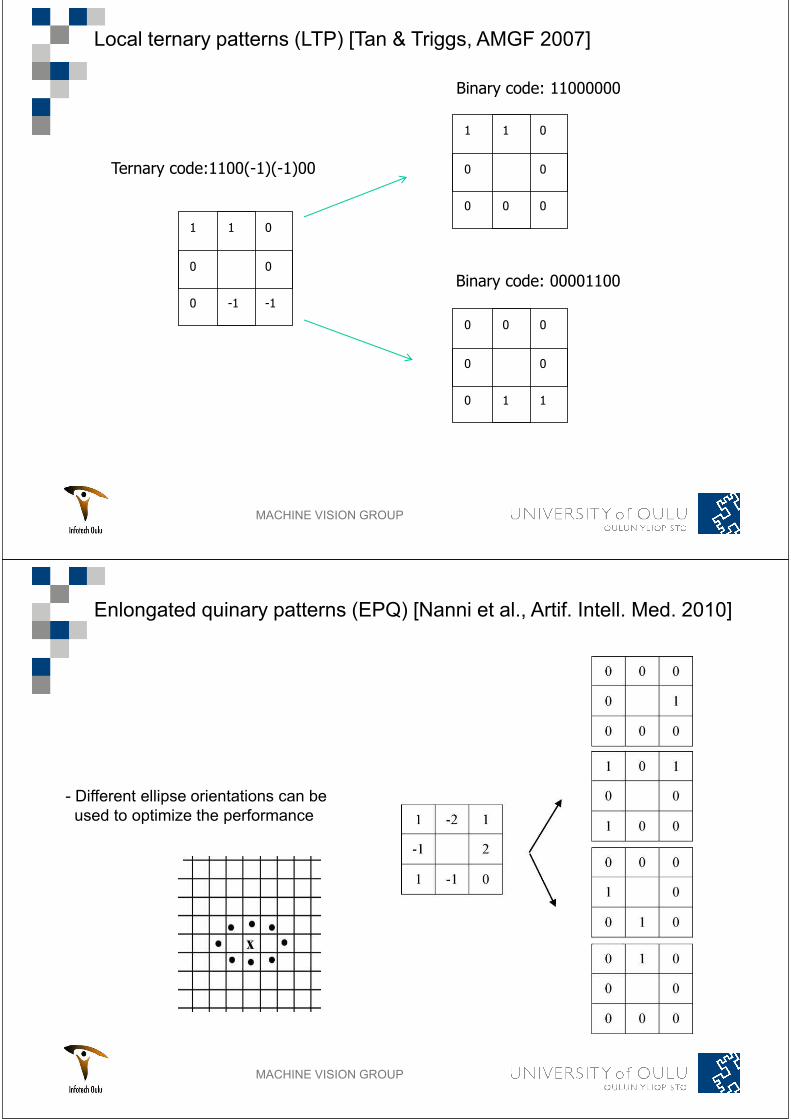
Binary code: 11000000
0
0 0
0
10 1
0
0
0 0
1
-10 -1
1
0
0 0
1
00 0
1
Binary code: 00001100
Ternary code:1100(-1)(-1)00
Local ternary patterns (LTP) [Tan & Triggs, AMGF 2007]
MACHINE VISION GROUP
Enlongated quinary patterns (EPQ) [Nanni et al., Artif. Intell. Med. 2010]
- Different ellipse orientations can be
used to optimize the performance
MACHINE VISION GROUP
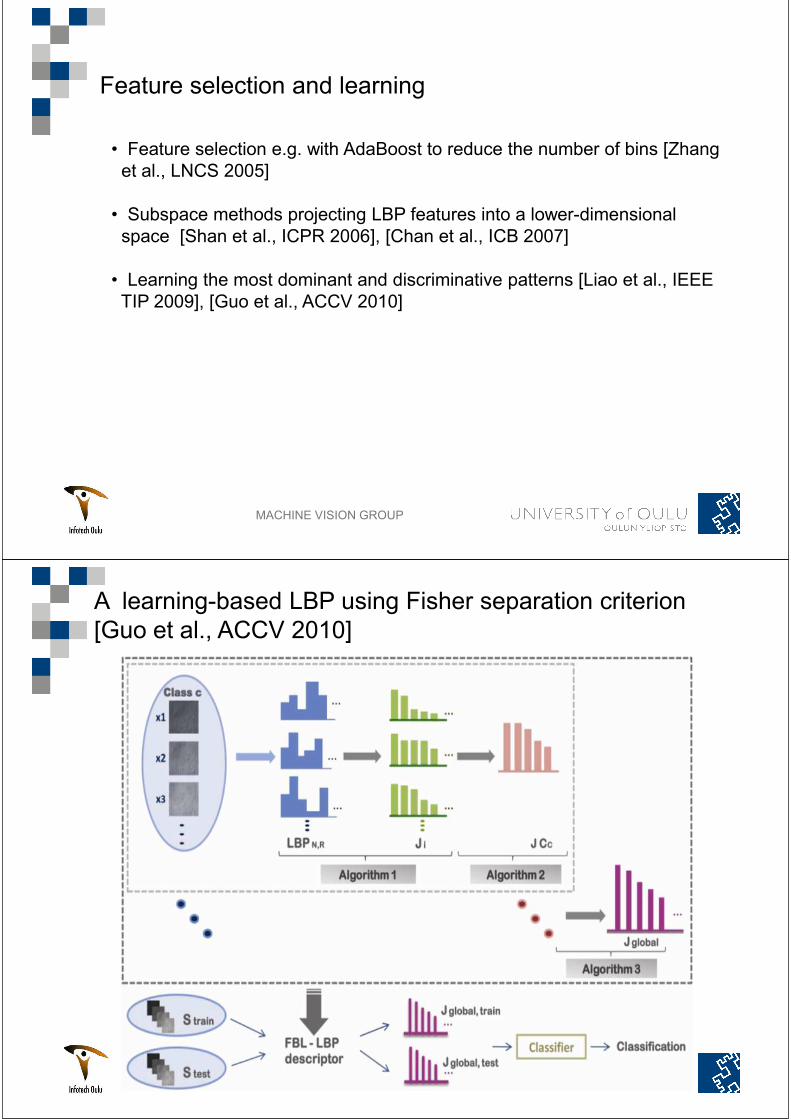
Feature selection e.g. with AdaBoost to reduce the number of bins [Zhang
et al., LNCS 2005]
Subspace methods projecting LBP features into a lower-dimensional
space [Shan et al., ICPR 2006], [Chan et al., ICB 2007]
Learning the most dominant and discriminative patterns [Liao et al., IEEE
TIP 2009], [Guo et al., ACCV 2010]
Feature selection and learning
MACHINE VISION GROUP
Input imageUniform
LBP histogram
A learning-based LBP using Fisher separation criterion
[Guo et al., ACCV 2010]
MACHINE VISION GROUP
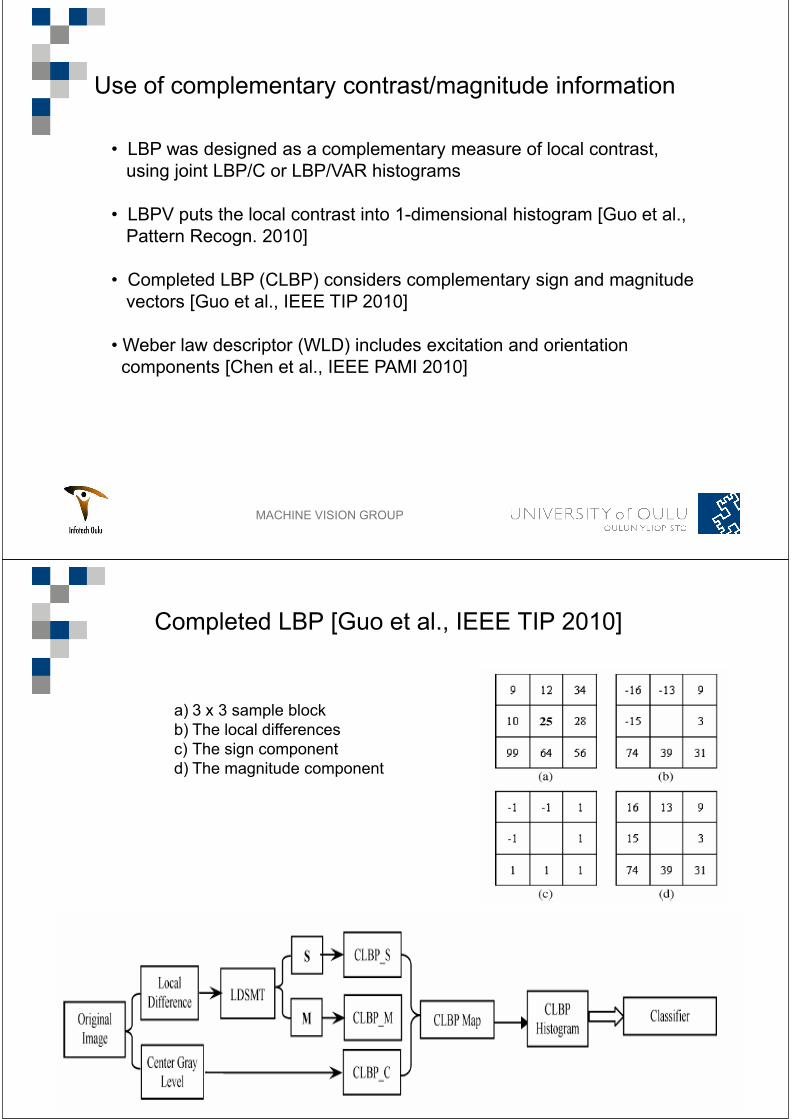
LBP was designed as a complementary measure of local contrast,
using joint LBP/C or LBP/VAR histograms
LBPV puts the local contrast into 1-dimensional histogram [Guo et al.,
Pattern Recogn. 2010]
Completed LBP (CLBP) considers complementary sign and magnitude
vectors [Guo et al., IEEE TIP 2010]
Weber law descriptor (WLD) includes excitation and orientation
components [Chen et al., IEEE PAMI 2010]
Use of complementary contrast/magnitude information
MACHINE VISION GROUP
Completed LBP [Guo et al., IEEE TIP 2010]
a) 3 x 3 sample block
b) The local differences
c) The sign component
d) The magnitude component
MACHINE VISION GROUP
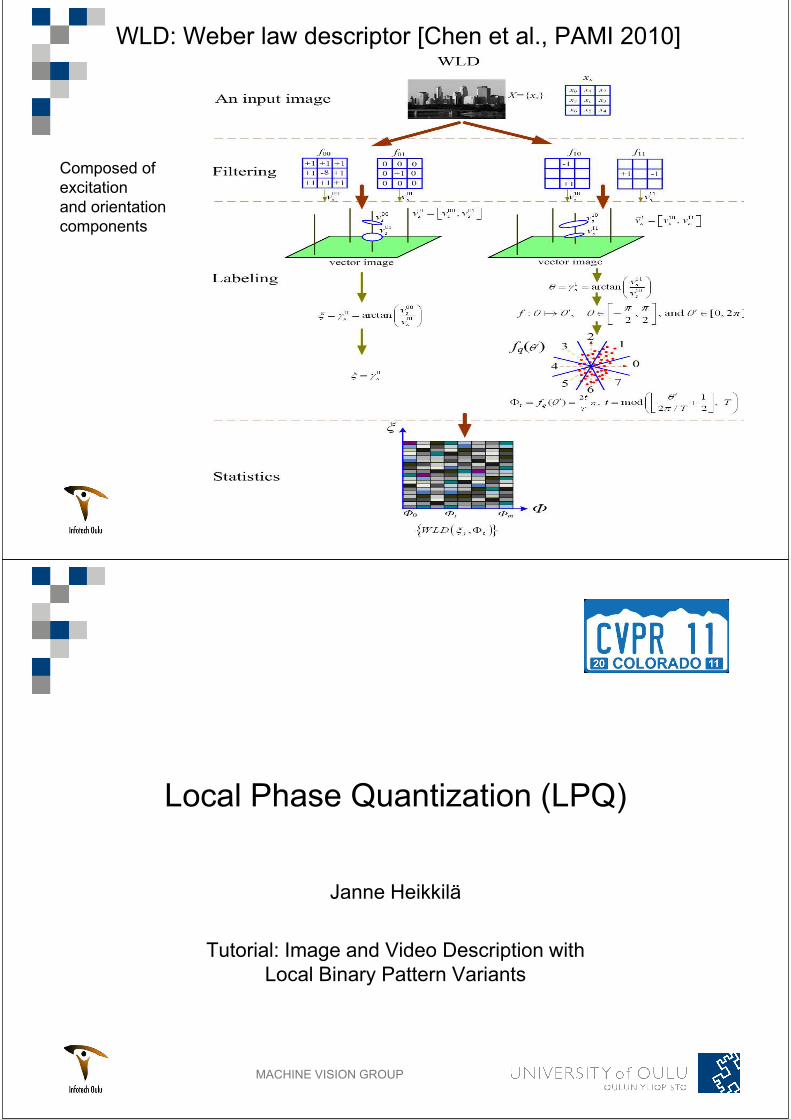
WLD: Weber law descriptor [Chen et al., PAMI 2010]
Composed of
excitation
and orientation
components
MACHINE VISION GROUP
Local Phase Quantization (LPQ)
Janne Heikkilä
Tutorial: Image and Video Description with
Local Binary Pattern Variants
MACHINE VISION GROUP
Motivation
Local descriptors are widely used in image analysis
Interest point descriptors (e.g. SIFT, SURF)
Texture descriptors (e.g. LBP, Gabor texture features)
Descriptors should be robust to various degradations including
geometric distortions, illumination changes and blur.
Blur-sensitivity of the descriptors has not been much studied in
the literature.
Sharp images are often assumed.
We propose using Fourier phase information for blur insensitive
texture analysis.
MACHINE VISION GROUP
Previous work on phase based methods
Phase correlation [Kuglin & Hines, ICCS 1975] has been
successfully used for image registration.
Fourier features based on
the phase rather than the amplitude do not seem to be useful for
Oppenheimer & Lim [Proc. IEEE 1981] showed the importance
of the phase information in signal reconstruction.
Daugman [PAMI 1993] used phase-quandrant coding of multi-
scale 2-D Gabor wavelet coefficients for iris recognition.
Fischer & Bigün [SCIA 1995] presented a method for texture
bondary tracking based on Gabor phase.
Zhou et al. [ICIP 2001] introduced a texture feature based on a
histogram of local Fourier coefficients (magnitude and phase).
Zhang et al. [TIP 2007] proposed histogram of Gabor phase
patterns (HGPP) for face recognition.
MACHINE VISION GROUP
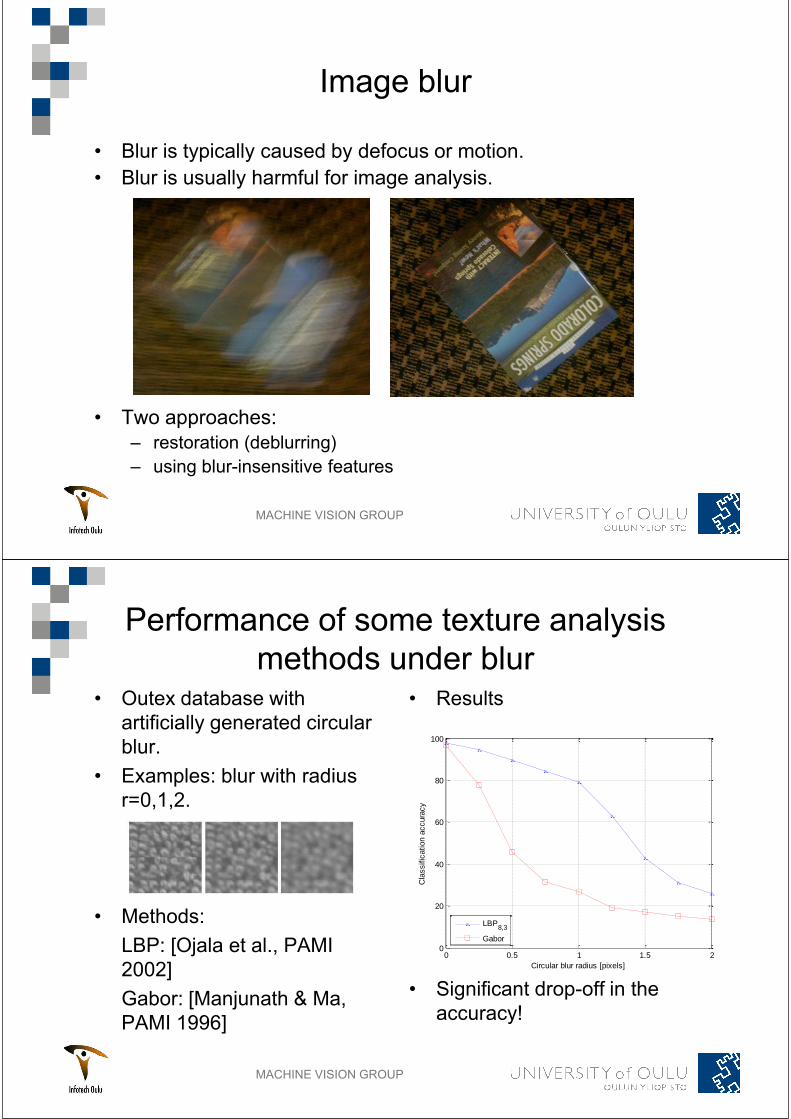
Image blur
Blur is typically caused by defocus or motion.
Blur is usually harmful for image analysis.
Two approaches:
restoration (deblurring)
using blur-insensitive features
MACHINE VISION GROUP
Performance of some texture analysis
methods under blurOutex database with
artificially generated circular
blur.
Examples: blur with radius
r=0,1,2.
Methods:
LBP: [Ojala et al., PAMI
2002]
Gabor: [Manjunath & Ma,
PAMI 1996]
Results
Significant drop-off in the
accuracy!
0 0.5 1 1.5 20
20
40
60
80
100
Circular blur radius [pixels]
Cla
ssifi
catio
n ac
cura
cy
LBP8,3
Gabor
MACHINE VISION GROUP
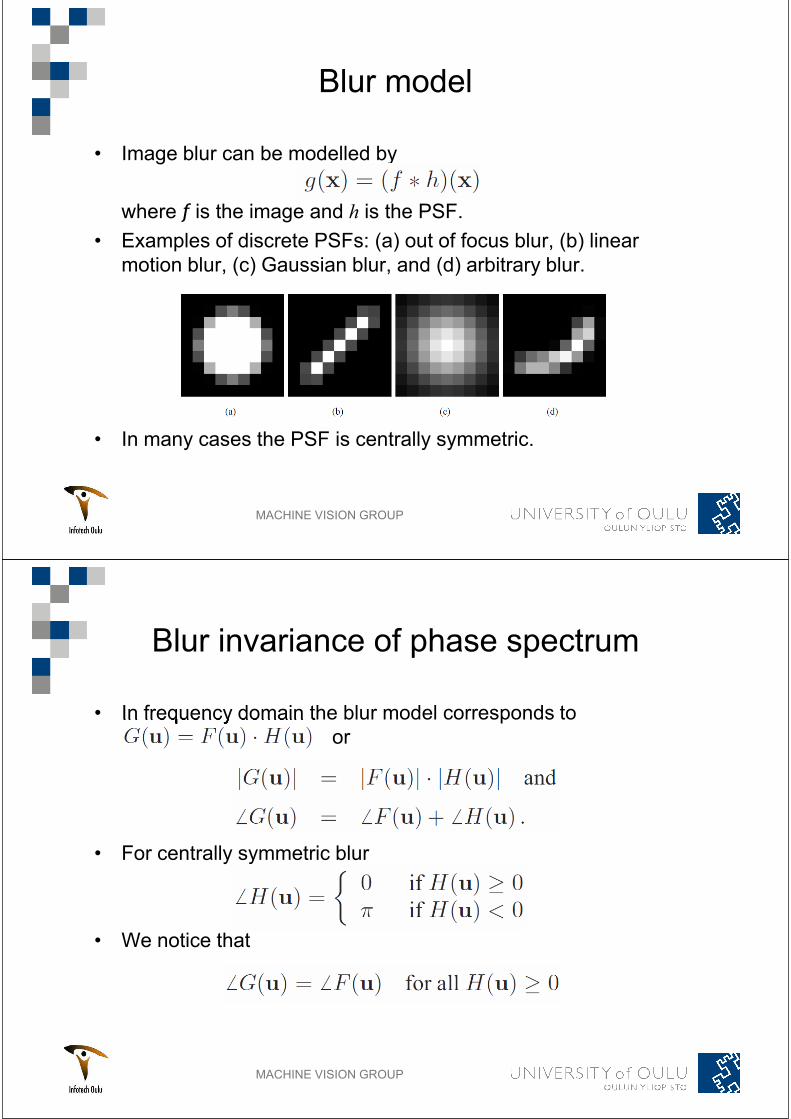
Blur model
Image blur can be modelled by
where f is the image and h is the PSF.
Examples of discrete PSFs: (a) out of focus blur, (b) linear
motion blur, (c) Gaussian blur, and (d) arbitrary blur.
In many cases the PSF is centrally symmetric.
MACHINE VISION GROUP
Blur invariance of phase spectrum
In frequency domain the blur model corresponds to
or
For centrally symmetric blur
We notice that
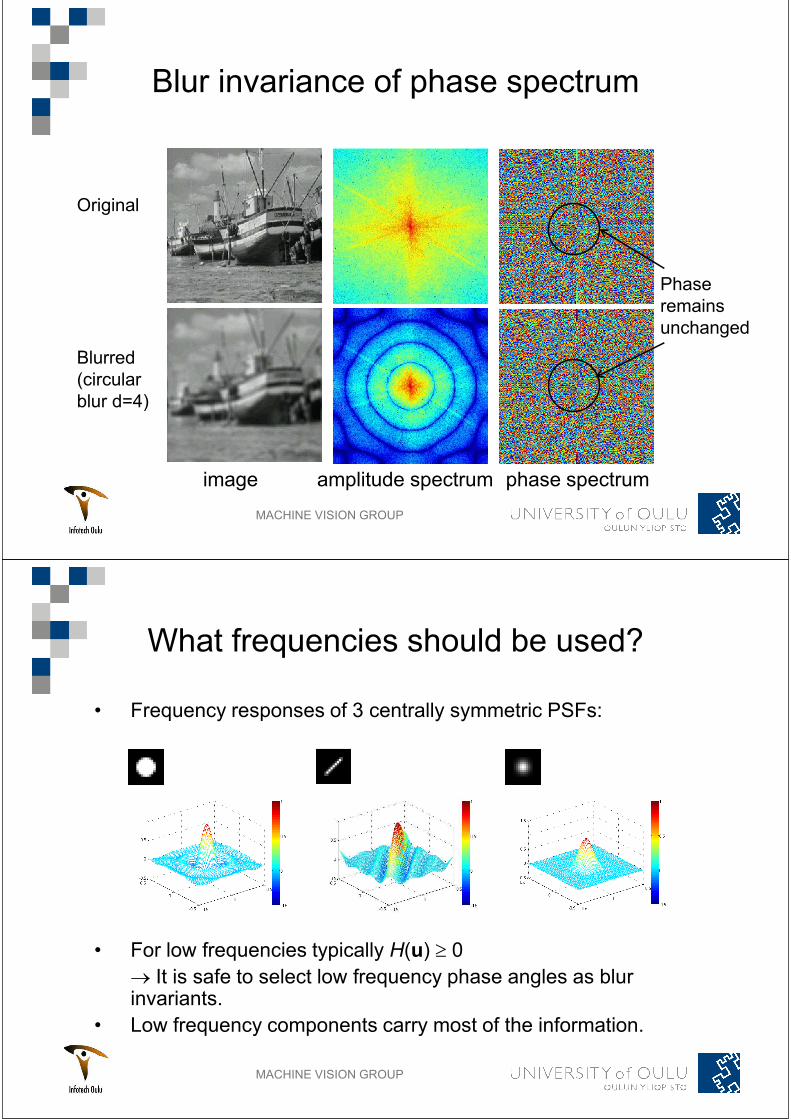
MACHINE VISION GROUP
Blur invariance of phase spectrum
image
Original
Blurred
(circular
blur d=4)
Phase
remains
unchanged
amplitude spectrum phase spectrum
MACHINE VISION GROUP
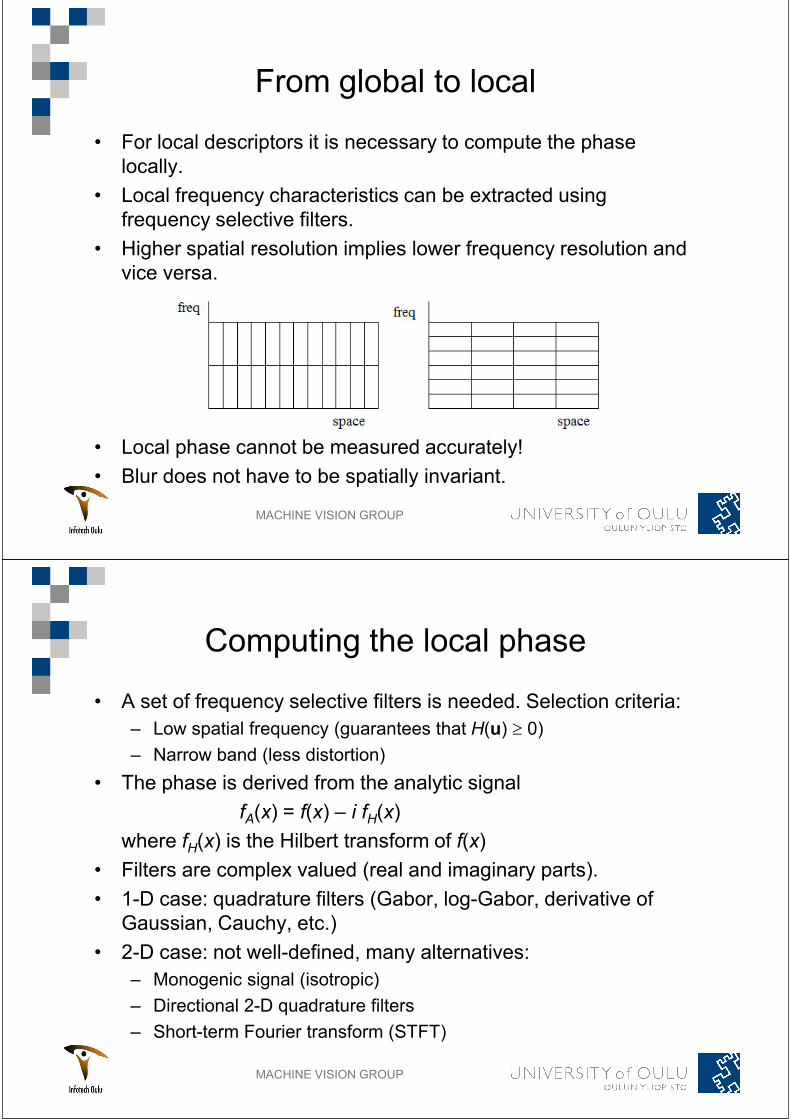
What frequencies should be used?
Frequency responses of 3 centrally symmetric PSFs:
For low frequencies typically H(u) 0
It is safe to select low frequency phase angles as blur invariants.
Low frequency components carry most of the information.
MACHINE VISION GROUP
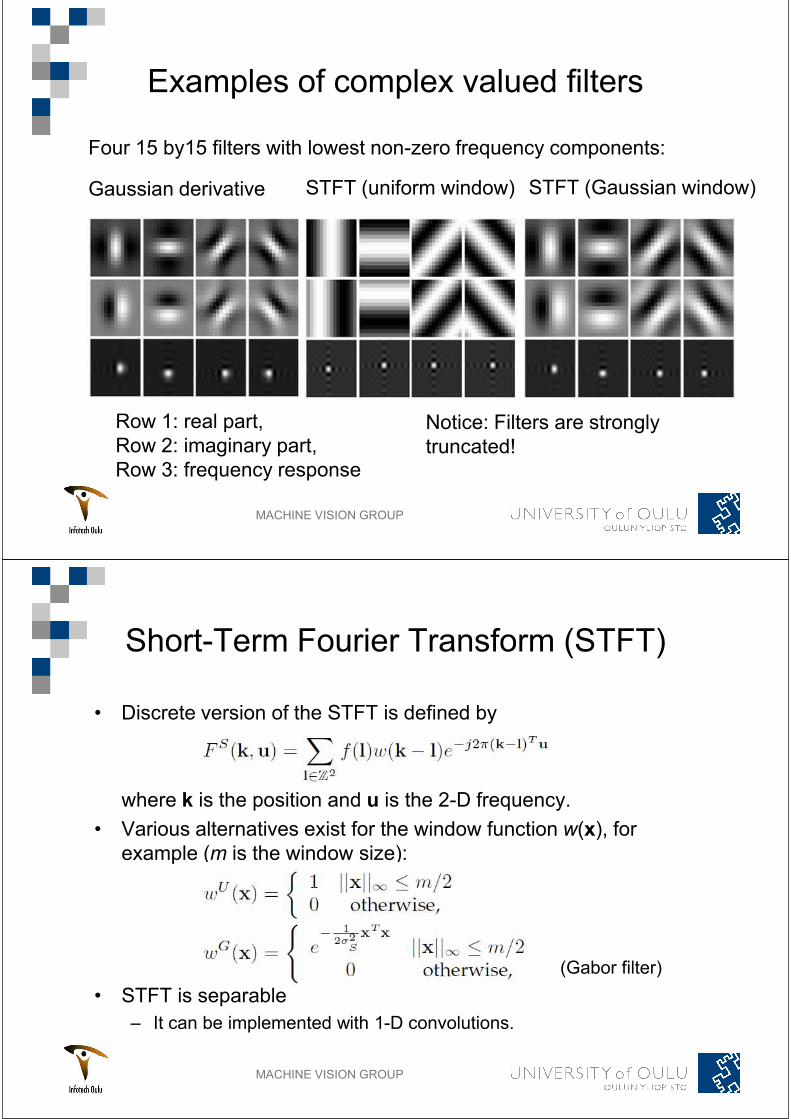
From global to local
For local descriptors it is necessary to compute the phase
locally.
Local frequency characteristics can be extracted using
frequency selective filters.
Higher spatial resolution implies lower frequency resolution and
vice versa.
Local phase cannot be measured accurately!
Blur does not have to be spatially invariant.
MACHINE VISION GROUP
Computing the local phase
A set of frequency selective filters is needed. Selection criteria:
Low spatial frequency (guarantees that H(u) 0)
Narrow band (less distortion)
The phase is derived from the analytic signal
fA(x) = f(x) i fH(x)
where fH(x) is the Hilbert transform of f(x)
Filters are complex valued (real and imaginary parts).
1-D case: quadrature filters (Gabor, log-Gabor, derivative of
Gaussian, Cauchy, etc.)
2-D case: not well-defined, many alternatives:
Monogenic signal (isotropic)
Directional 2-D quadrature filters
Short-term Fourier transform (STFT)
MACHINE VISION GROUP
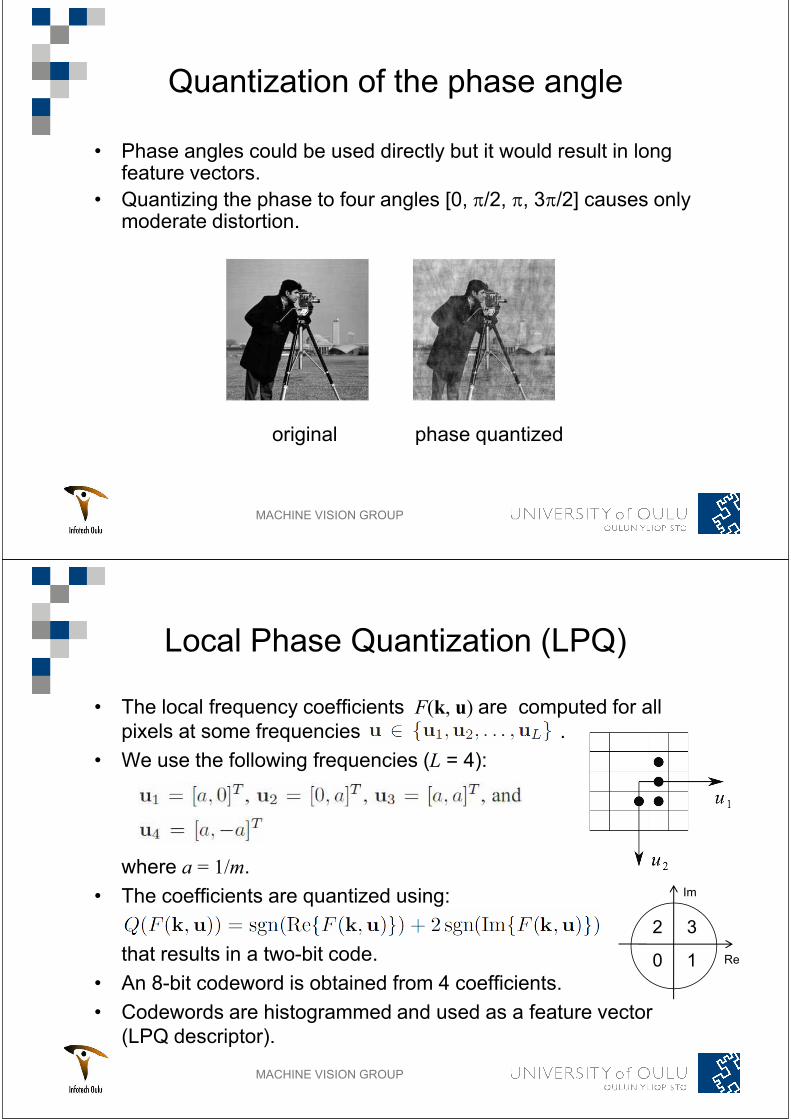
Examples of complex valued filters
Four 15 by15 filters with lowest non-zero frequency components:
Gaussian derivative
Row 1: real part,
Row 2: imaginary part,
Row 3: frequency response
Notice: Filters are strongly
truncated!
STFT (uniform window) STFT (Gaussian window)
MACHINE VISION GROUP
Short-Term Fourier Transform (STFT)
Discrete version of the STFT is defined by
where k is the position and u is the 2-D frequency.
Various alternatives exist for the window function w(x), for
example (m is the window size):
(Gabor filter)
STFT is separable
It can be implemented with 1-D convolutions.
MACHINE VISION GROUP
Quantization of the phase angle
Phase angles could be used directly but it would result in long feature vectors.
Quantizing the phase to four angles [0, /2, , 3 /2] causes only moderate distortion.
original phase quantized
MACHINE VISION GROUP
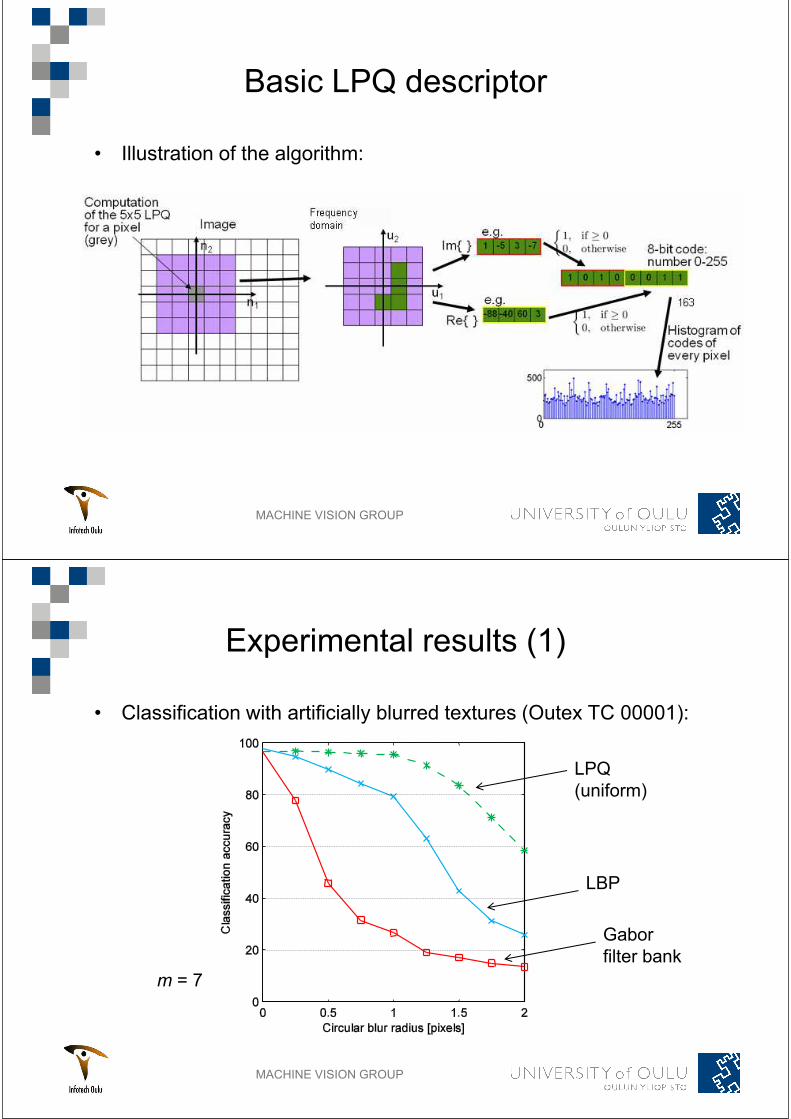
Local Phase Quantization (LPQ)
The local frequency coefficients F(k, u) are computed for all
pixels at some frequencies .
We use the following frequencies (L = 4):
where a = 1/m.
The coefficients are quantized using:
that results in a two-bit code.
An 8-bit codeword is obtained from 4 coefficients.
Codewords are histogrammed and used as a feature vector
(LPQ descriptor).
Re0 1
2 3
Im
MACHINE VISION GROUP
Basic LPQ descriptor
Illustration of the algorithm:
MACHINE VISION GROUP
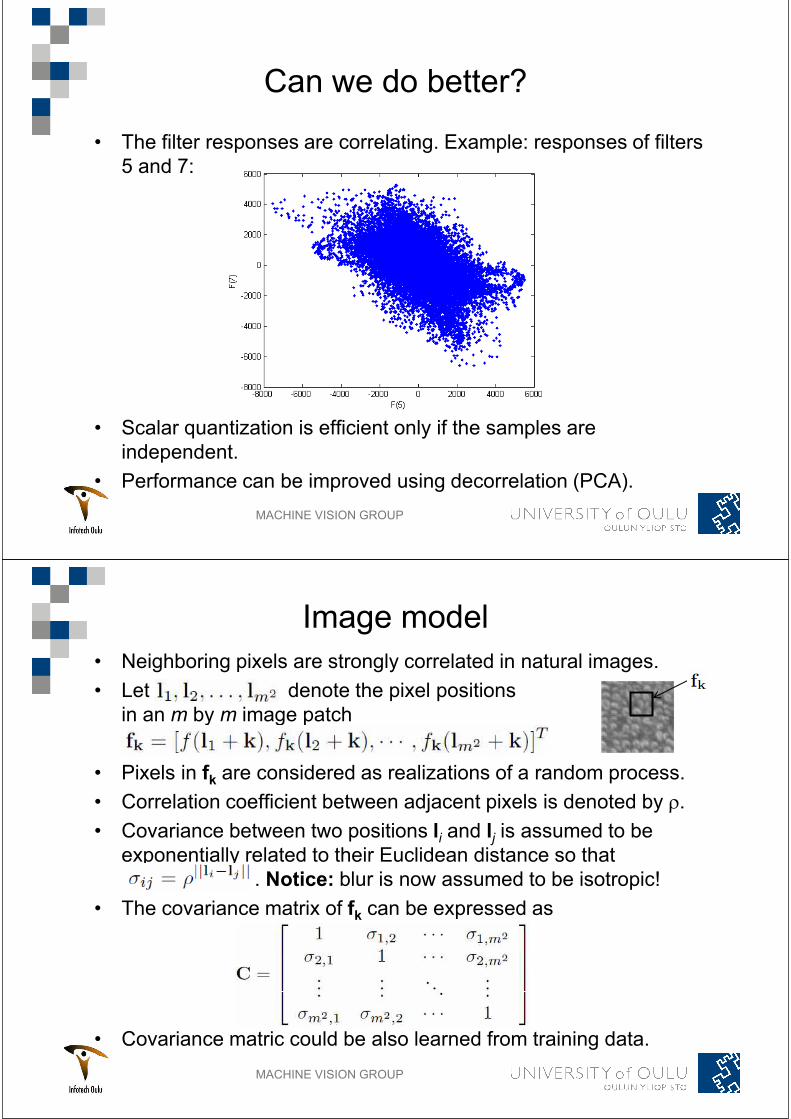
Experimental results (1)
Classification with artificially blurred textures (Outex TC 00001):
LPQ
(uniform)
LBP
Gabor
filter bank
m = 7
MACHINE VISION GROUP
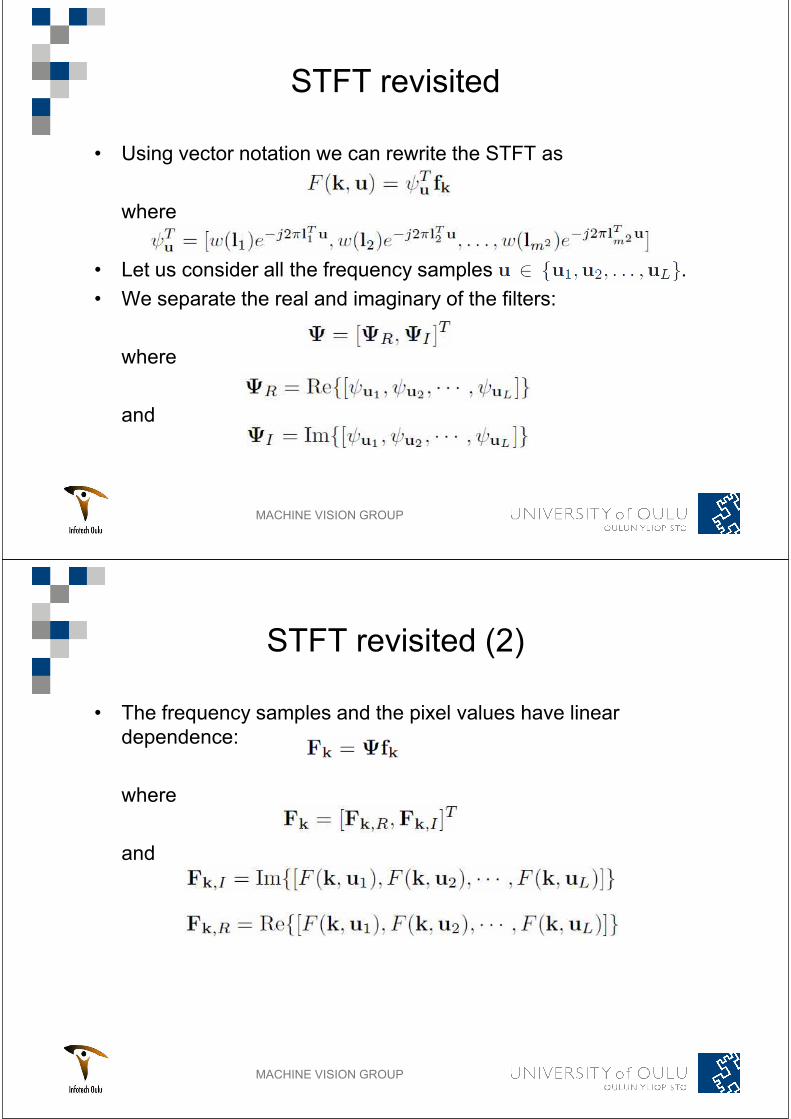
Can we do better?
The filter responses are correlating. Example: responses of filters
5 and 7:
Scalar quantization is efficient only if the samples are
independent.
Performance can be improved using decorrelation (PCA).
MACHINE VISION GROUP
Image model
Neighboring pixels are strongly correlated in natural images.
Let denote the pixel positions
in an m by m image patch
Pixels in fk are considered as realizations of a random process.
Correlation coefficient between adjacent pixels is denoted by .
Covariance between two positions li and lj is assumed to be
exponentially related to their Euclidean distance so that
. Notice: blur is now assumed to be isotropic!
The covariance matrix of fk can be expressed as
Covariance matric could be also learned from training data.
MACHINE VISION GROUP
STFT revisited
Using vector notation we can rewrite the STFT as
where
Let us consider all the frequency samples .
We separate the real and imaginary of the filters:
where
and
MACHINE VISION GROUP
STFT revisited (2)
The frequency samples and the pixel values have linear
dependence:
where
and
MACHINE VISION GROUP
Decorrelated LPQ
The covariance matrix of the frequency samples becomes
If L = 4, D is an 8 by 8 matrix.
We can employ whitening transform
where V is an orthonormal matrix derived by using SVD:
The vector Gk is quantized
8-bit integers obtained are used in the same way as in the basic
LPQ.Reference: Ojansivu V & Heikkilä J (2008) Blur insensitive texture classification using local
phase quantization. Image and Signal Processing, ICISP 2008 Proceedings, Lecture Notes
in Computer Science 5099:236-243.
MACHINE VISION GROUP
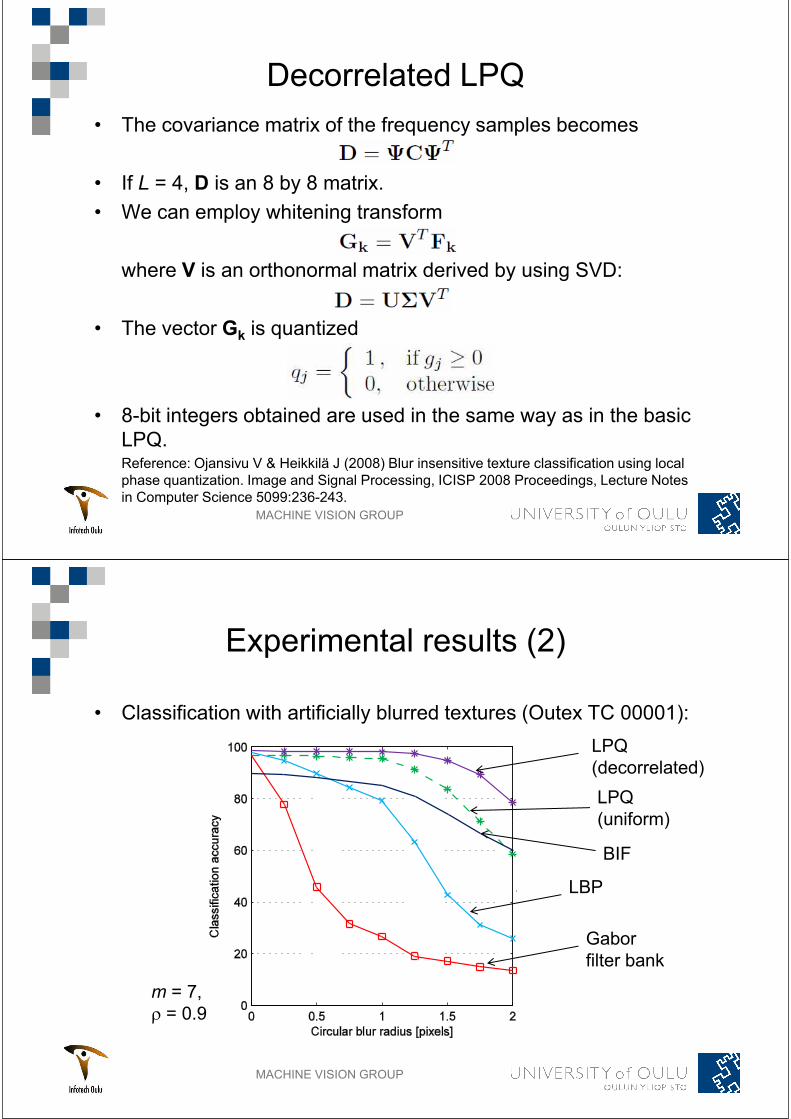
Experimental results (2)
Classification with artificially blurred textures (Outex TC 00001):
LPQ
(uniform)
LBP
Gabor
filter bank
LPQ
(decorrelated)
m = 7,
= 0.9
BIF
MACHINE VISION GROUP
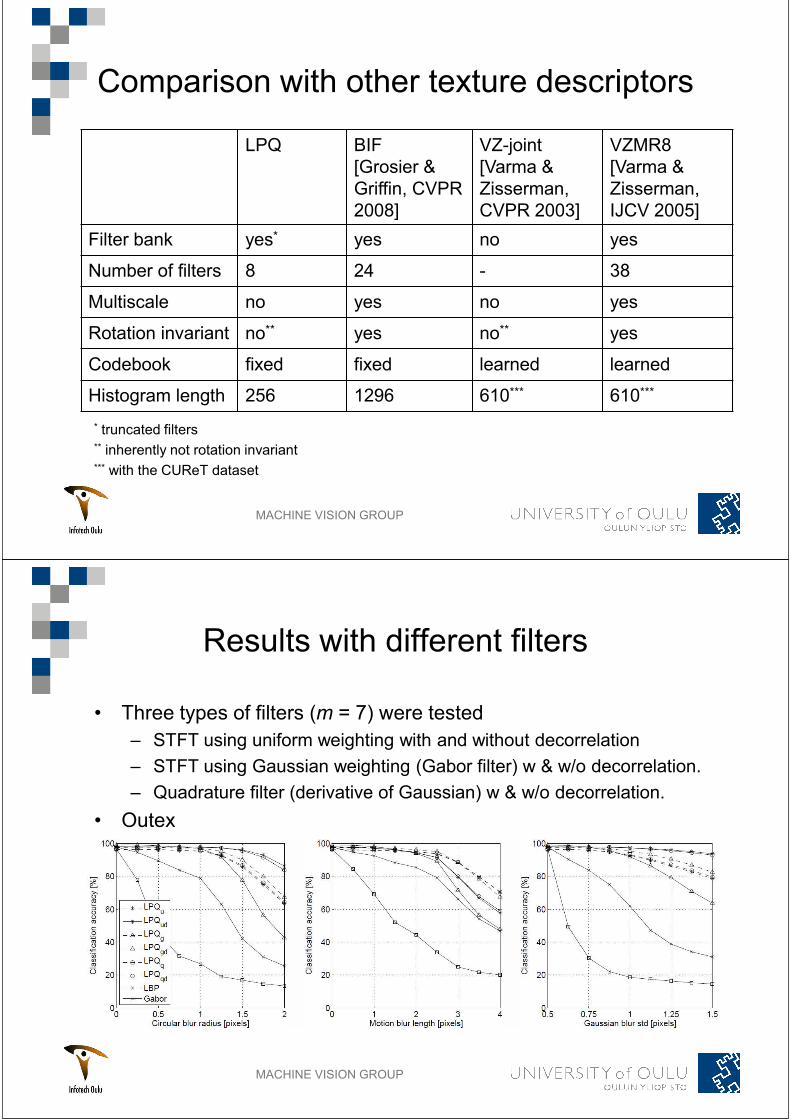
Comparison with other texture descriptors
* truncated filters** inherently not rotation invariant*** with the CUReT dataset
LPQ BIF
[Grosier &
Griffin, CVPR
2008]
VZ-joint
[Varma &
Zisserman,
CVPR 2003]
VZMR8
[Varma &
Zisserman,
IJCV 2005]
Filter bank yes* yes no yes
Number of filters 8 24 - 38
Multiscale no yes no yes
Rotation invariant no** yes no** yes
Codebook fixed fixed learned learned
Histogram length 256 1296 610*** 610***
MACHINE VISION GROUP
Results with different filters
Three types of filters (m = 7) were tested
STFT using uniform weighting with and without decorrelation
STFT using Gaussian weighting (Gabor filter) w & w/o decorrelation.
Quadrature filter (derivative of Gaussian) w & w/o decorrelation.
Outex
MACHINE VISION GROUP
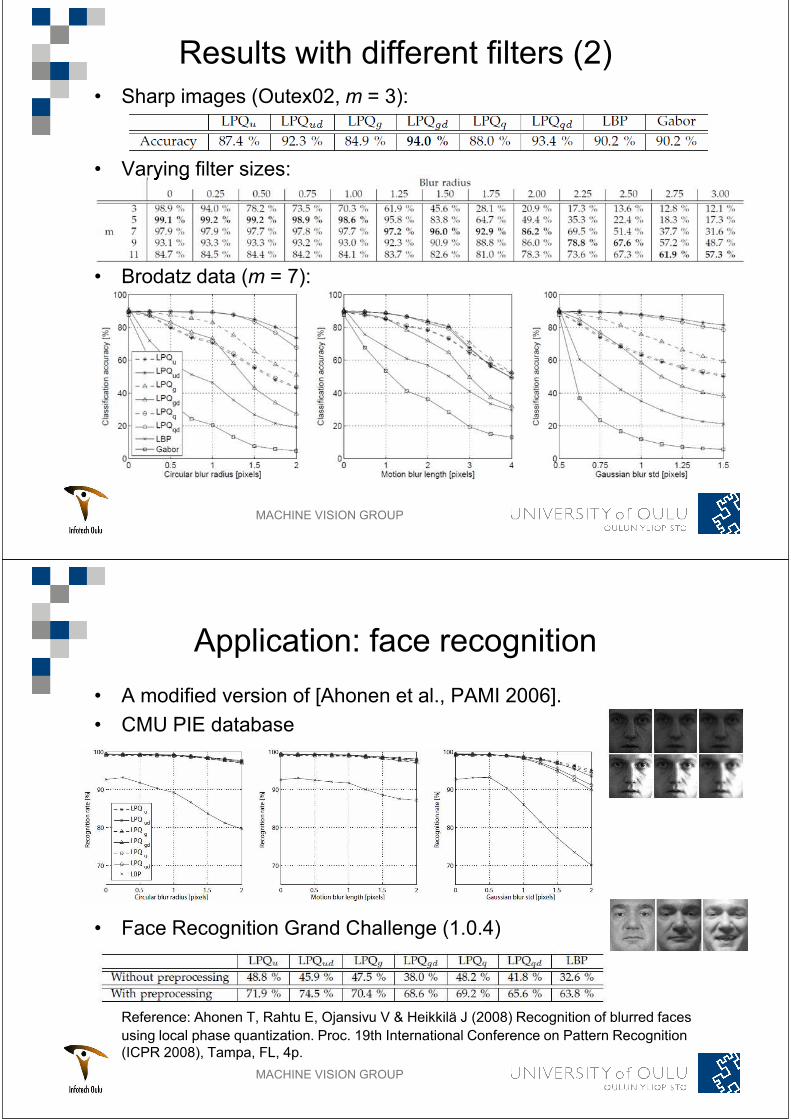
Results with different filters (2)
Sharp images (Outex02, m = 3):
Varying filter sizes:
Brodatz data (m = 7):
MACHINE VISION GROUP
Application: face recognition
A modified version of [Ahonen et al., PAMI 2006].
CMU PIE database
Face Recognition Grand Challenge (1.0.4)
Reference: Ahonen T, Rahtu E, Ojansivu V & Heikkilä J (2008) Recognition of blurred faces
using local phase quantization. Proc. 19th International Conference on Pattern Recognition
(ICPR 2008), Tampa, FL, 4p.
MACHINE VISION GROUP
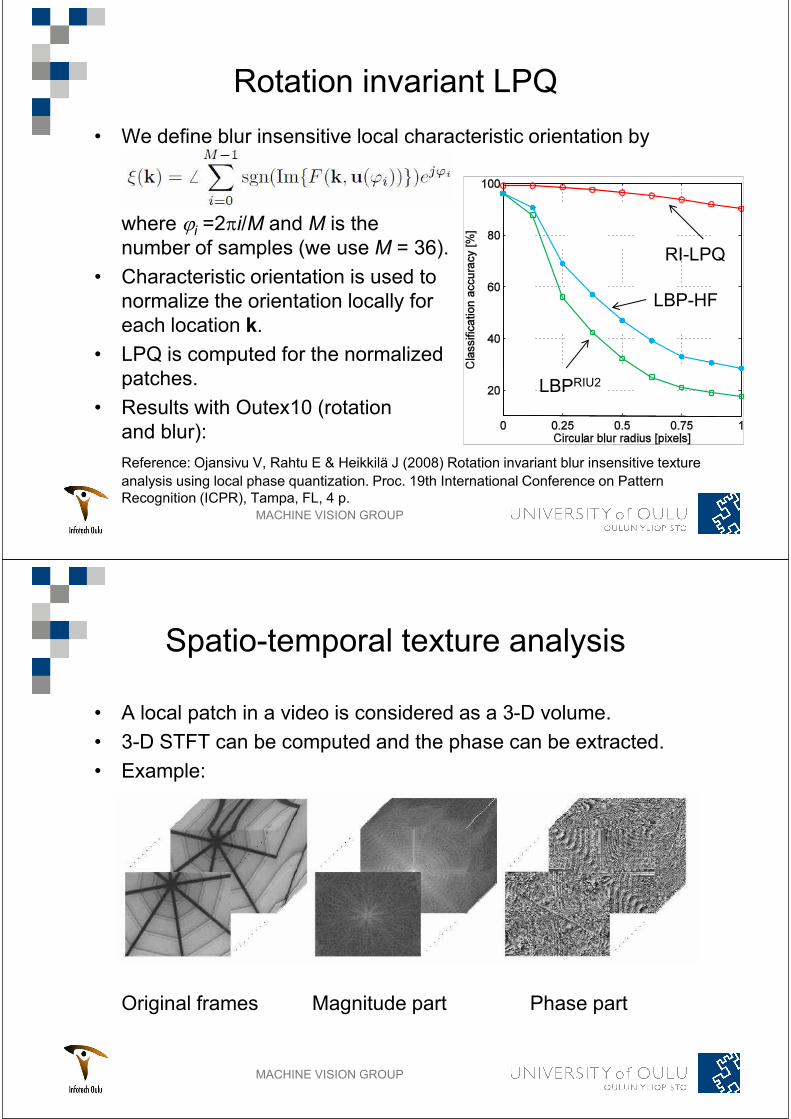
Rotation invariant LPQ
We define blur insensitive local characteristic orientation by
where i =2 i/M and M is the
number of samples (we use M = 36).
Characteristic orientation is used to
normalize the orientation locally for
each location k.
LPQ is computed for the normalized
patches.
Results with Outex10 (rotation
and blur):
Reference: Ojansivu V, Rahtu E & Heikkilä J (2008) Rotation invariant blur insensitive texture
analysis using local phase quantization. Proc. 19th International Conference on Pattern
Recognition (ICPR), Tampa, FL, 4 p.
RI-LPQ
LBP-HF
LBPRIU2
MACHINE VISION GROUP
Spatio-temporal texture analysis
A local patch in a video is considered as a 3-D volume.
3-D STFT can be computed and the phase can be extracted.
Example:
Original frames Magnitude part Phase part
MACHINE VISION GROUP
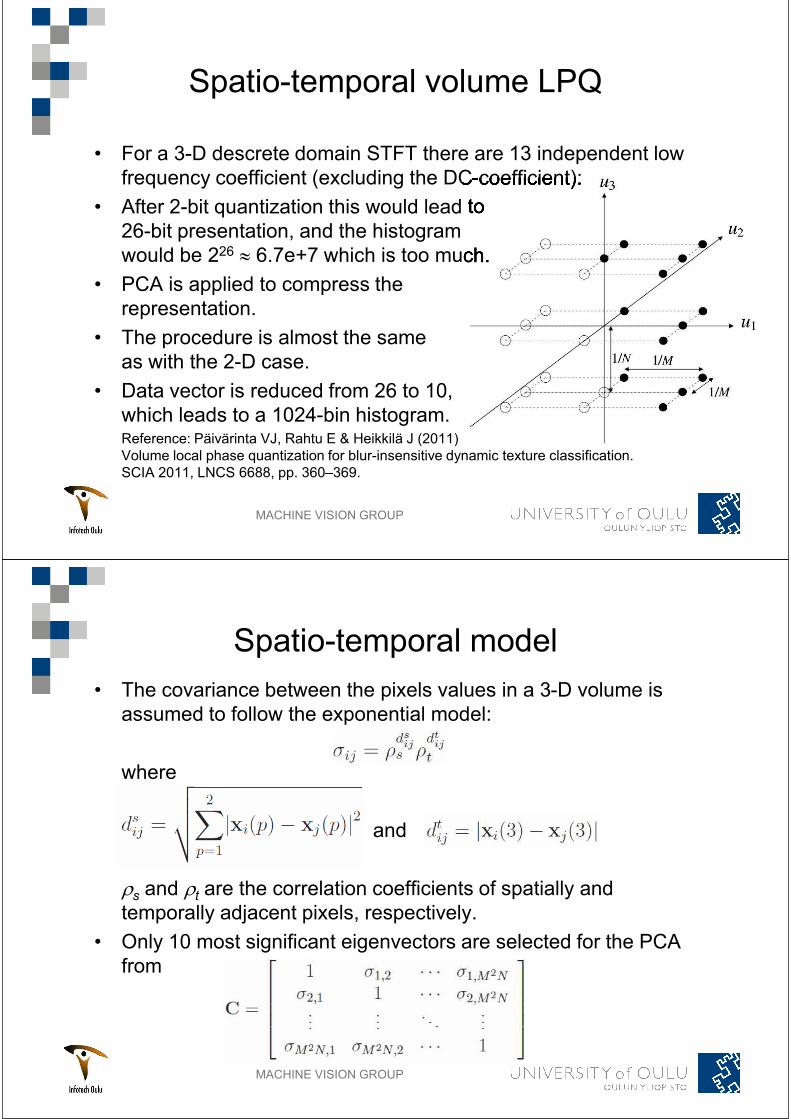
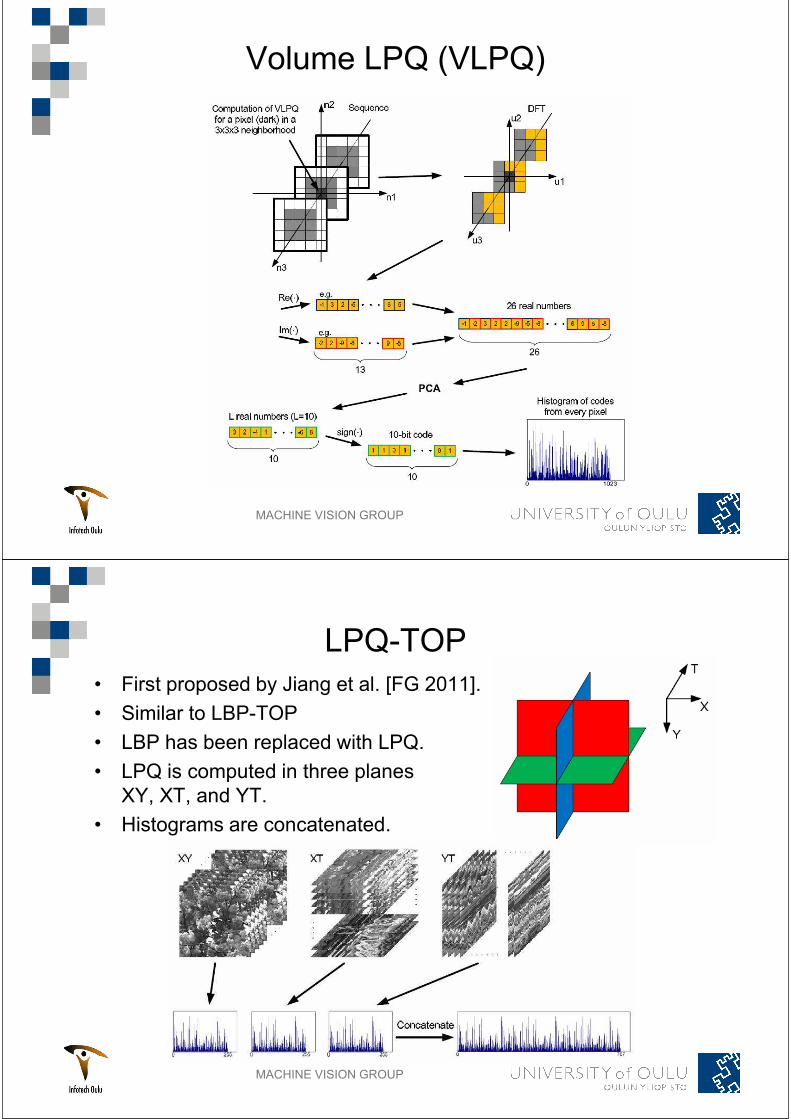
Spatio-temporal volume LPQ
For a 3-D descrete domain STFT there are 13 independent low
frequency coefficient (excluding the DC-coefficient):
After 2-bit quantization this would lead to
26-bit presentation, and the histogram
would be 226 6.7e+7 which is too much.
PCA is applied to compress the
representation.
The procedure is almost the same
as with the 2-D case.
Data vector is reduced from 26 to 10,
which leads to a 1024-bin histogram.Reference: Päivärinta VJ, Rahtu E & Heikkilä J (2011)
Volume local phase quantization for blur-insensitive dynamic texture classification.
SCIA 2011, LNCS 6688, pp. 360 369.
MACHINE VISION GROUP
Spatio-temporal model
The covariance between the pixels values in a 3-D volume is
assumed to follow the exponential model:
where
and
s and t are the correlation coefficients of spatially and
temporally adjacent pixels, respectively.
Only 10 most significant eigenvectors are selected for the PCA
from
MACHINE VISION GROUP
Volume LPQ (VLPQ)
MACHINE VISION GROUP
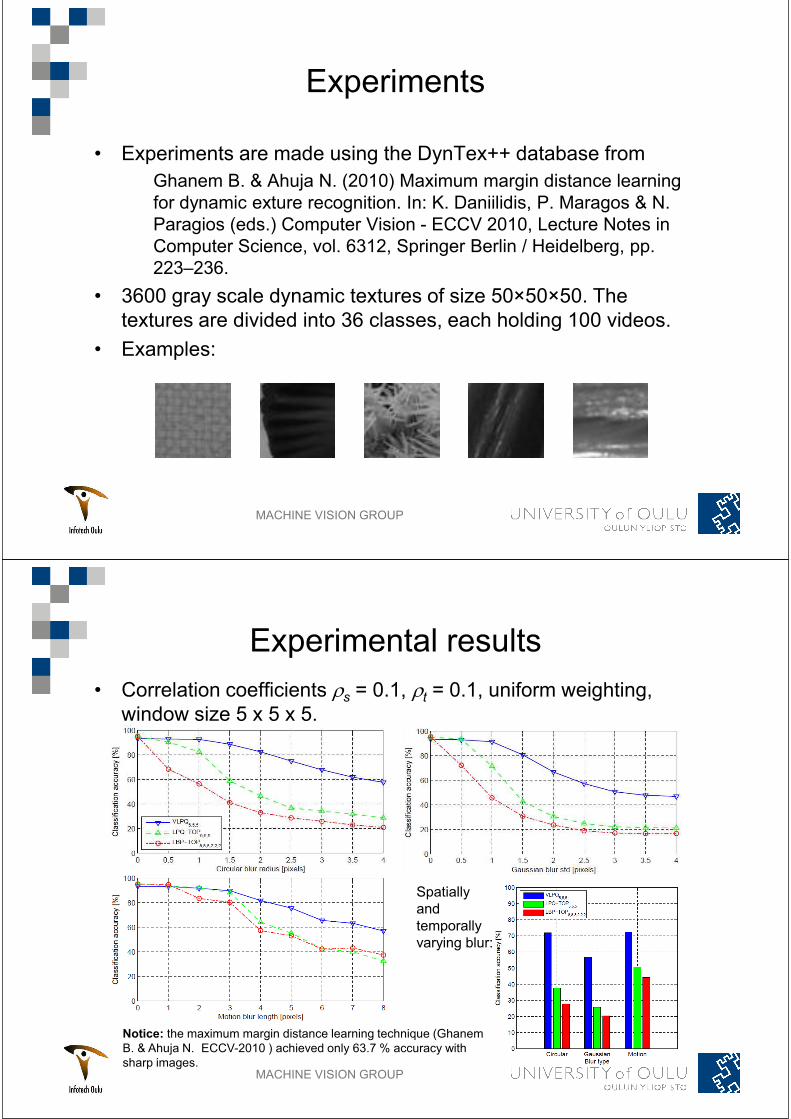
LPQ-TOP
First proposed by Jiang et al. [FG 2011].
Similar to LBP-TOP
LBP has been replaced with LPQ.
LPQ is computed in three planes
XY, XT, and YT.
Histograms are concatenated.
MACHINE VISION GROUP
Experiments
Experiments are made using the DynTex++ database from
Ghanem B. & Ahuja N. (2010) Maximum margin distance learning
for dynamic exture recognition. In: K. Daniilidis, P. Maragos & N.
Paragios (eds.) Computer Vision - ECCV 2010, Lecture Notes in
Computer Science, vol. 6312, Springer Berlin / Heidelberg, pp.
223 236.
3600 gray scale dynamic textures of size 50×50×50. The
textures are divided into 36 classes, each holding 100 videos.
Examples:
MACHINE VISION GROUP
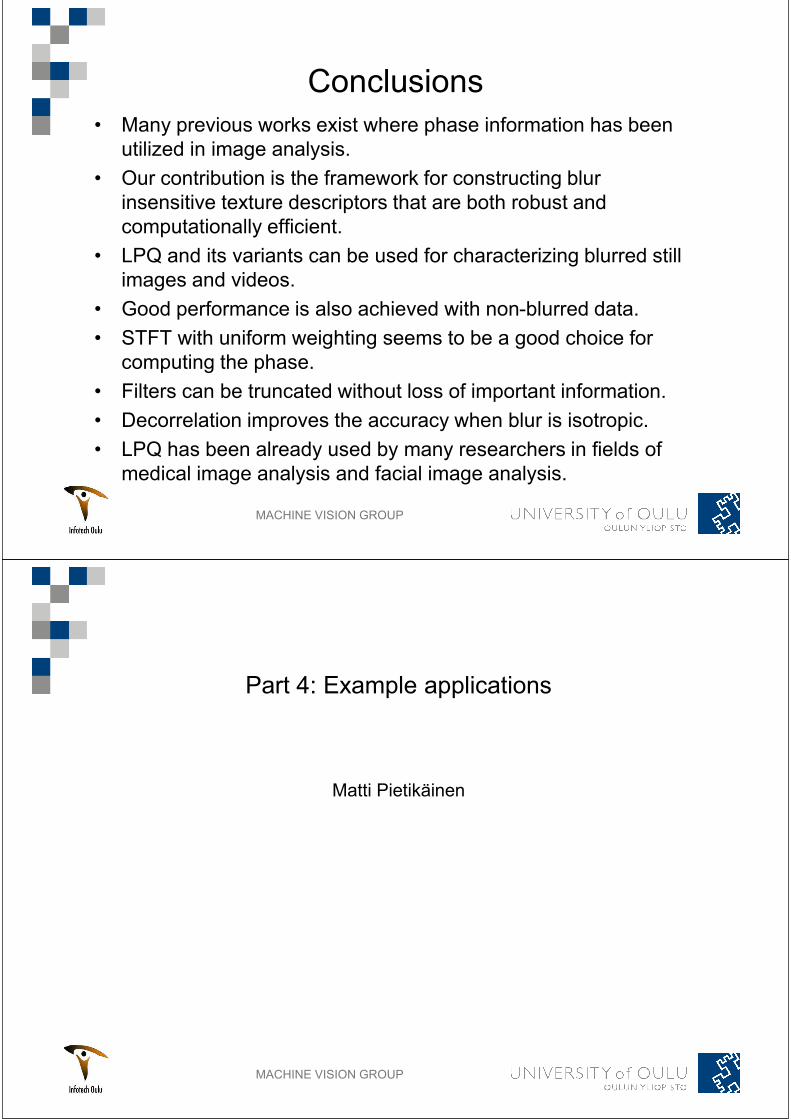
Experimental results
Correlation coefficients s = 0.1, t = 0.1, uniform weighting,
window size 5 x 5 x 5.
Spatially
and
temporally
varying blur:
Notice: the maximum margin distance learning technique (Ghanem
B. & Ahuja N. ECCV-2010 ) achieved only 63.7 % accuracy with
sharp images.
MACHINE VISION GROUP
Implementation and performance
Matlab implementations of LPQ, RI-LPQ, VLPQ and LPQ-TOP
can be downloaded from
http://www.cse.oulu.fi/Downloads/LPQMatlab
Execution times for a DynTex++ video sequence (50 x 50 x 50
pixels):
Platform: MATLAB R2010a on a 2.4 GHz, 96 GB Sunray server
MACHINE VISION GROUP
Papers where LPQ has been usedChan C, Kittler J, Poh N, Ahonen T & Pietikäinen M (2009) (Multiscale) local phase
quantization histogram discriminant analysis with score normalisation for robust face
recognition, In Proc. IEEE Workshop on Video-Oriented Object and Event Classification,
633 640.
Nishiyama M, Hadid A, Takeshima H, Shotton J, Kozakaya T & Yamaguchi O (2011) Facial
deblur inference using subspace analysis for recognition of blurred faces. IEEE
Transactions on Pattern Analysis and Machine Intelligence 33(4): 838-845.
Brahnam S, Nanni L, Shi J-Y & Lumini A (2010) Local phase quantization texture descriptor
for protein classification., Proc. International Conference on Bioinformatics and
Computational Biology (Biocomp2010), Las Vegas, Nevada, USA, 7 p.
Nanni L, Lumini A & Brahnam S (2010) Local binary patterns variants as texture descriptors
for medical image analysis, Artificial Intelligence in Medicine 49(2):117-125.
Fiche C, Ladret P & Vu NS (2010) Blurred Face Recognition Algorithm Guided by a No-
Reference Blur Metric. Image Processing: Machine Vision Applications III, 9 p.
Jiang B, Valstar MF & Pantic M (2011) Action unit detection using sparse appearance
descriptors in space-time video volumes. Proc. 9th IEEE Conference on Automatic Face
and Gesture Recognition (FG 2011), Santa Barbara, CA, 314-321.
Yang S & Bhanu B (2011) Facial Expression Recognition Using Emotion Avatar Image.
Proc. Workshop on Facial Expression Recognition and Analysis Challenge FERA2011,
Santa Barbara, CA, 866-871.
Dhall A., Asthana A., Goecke R., and Gedeon T. (2011) Emotion Recognition Using PHOG
and LPQ features. Proc. Workshop on Facial Expression Recognition and Analysis
Challenge FERA2011, Santa Barbara (CA), 878-883.
MACHINE VISION GROUP
Conclusions
Many previous works exist where phase information has been
utilized in image analysis.
Our contribution is the framework for constructing blur
insensitive texture descriptors that are both robust and
computationally efficient.
LPQ and its variants can be used for characterizing blurred still
images and videos.
Good performance is also achieved with non-blurred data.
STFT with uniform weighting seems to be a good choice for
computing the phase.
Filters can be truncated without loss of important information.
Decorrelation improves the accuracy when blur is isotropic.
LPQ has been already used by many researchers in fields of
medical image analysis and facial image analysis.
MACHINE VISION GROUP
Part 4: Example applications
Matti Pietikäinen
MACHINE VISION GROUP
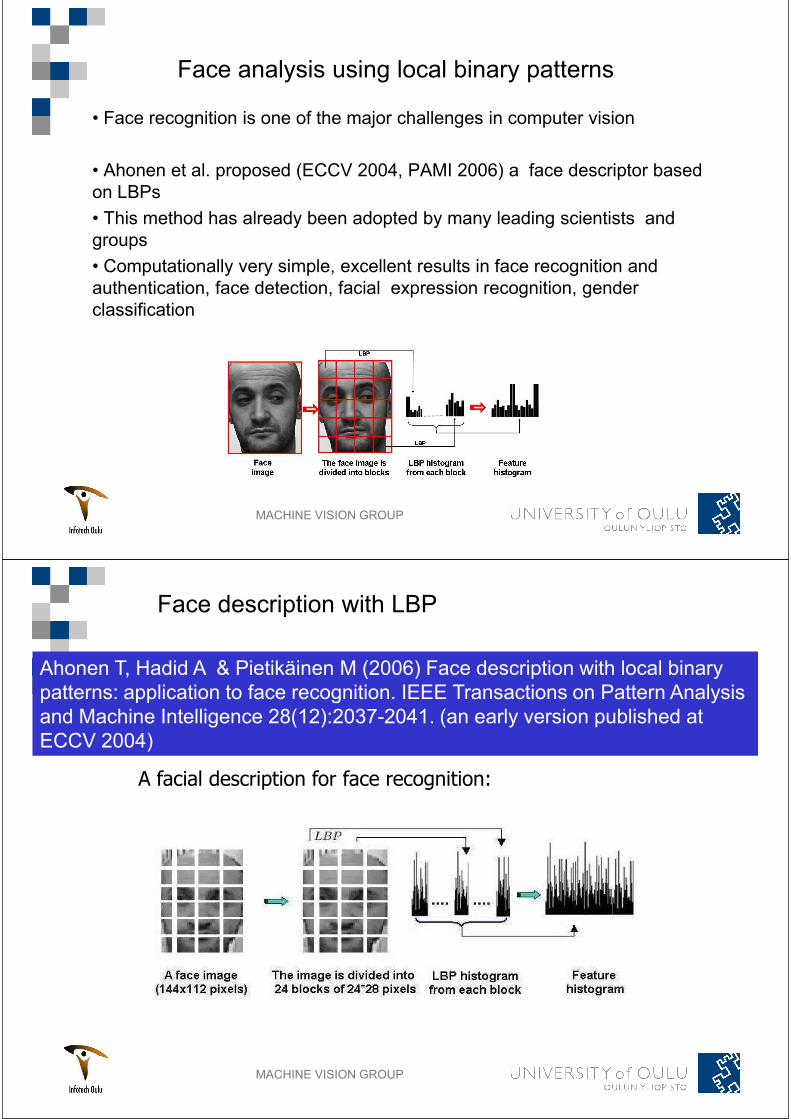
Face analysis using local binary patterns
Face recognition is one of the major challenges in computer vision
Ahonen et al. proposed (ECCV 2004, PAMI 2006) a face descriptor based
on LBPs
This method has already been adopted by many leading scientists and
groups
Computationally very simple, excellent results in face recognition and
authentication, face detection, facial expression recognition, gender
classification
MACHINE VISION GROUP
Face description with LBP
Ahonen T, Hadid A & Pietikäinen M (2006) Face description with local binary
patterns: application to face recognition. IEEE Transactions on Pattern Analysis
and Machine Intelligence 28(12):2037-2041. (an early version published at
ECCV 2004)
A facial description for face recognition:
MACHINE VISION GROUP
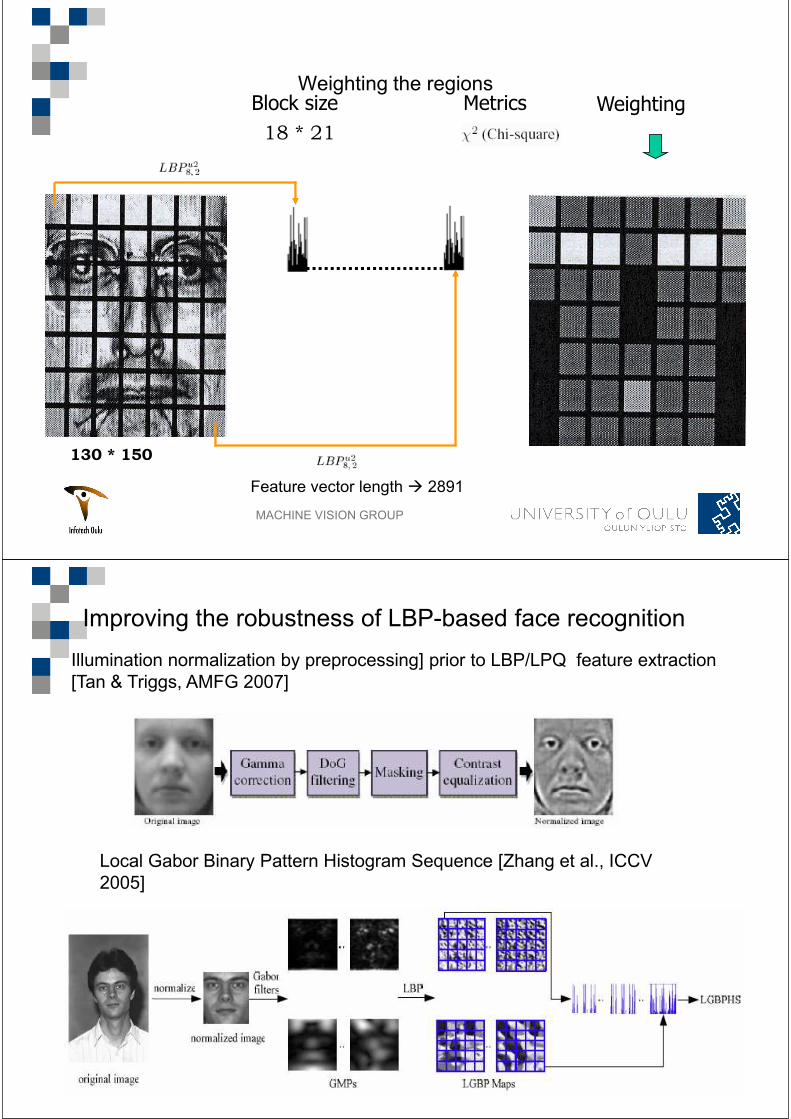
Weighting the regionsBlock size Metrics Weighting
18 * 21
130 * 150
Feature vector length 2891
MACHINE VISION GROUP
Local Gabor Binary Pattern Histogram Sequence [Zhang et al., ICCV
2005]
Illumination normalization by preprocessing] prior to LBP/LPQ feature extraction
[Tan & Triggs, AMFG 2007]
Improving the robustness of LBP-based face recognition
MACHINE VISION GROUP
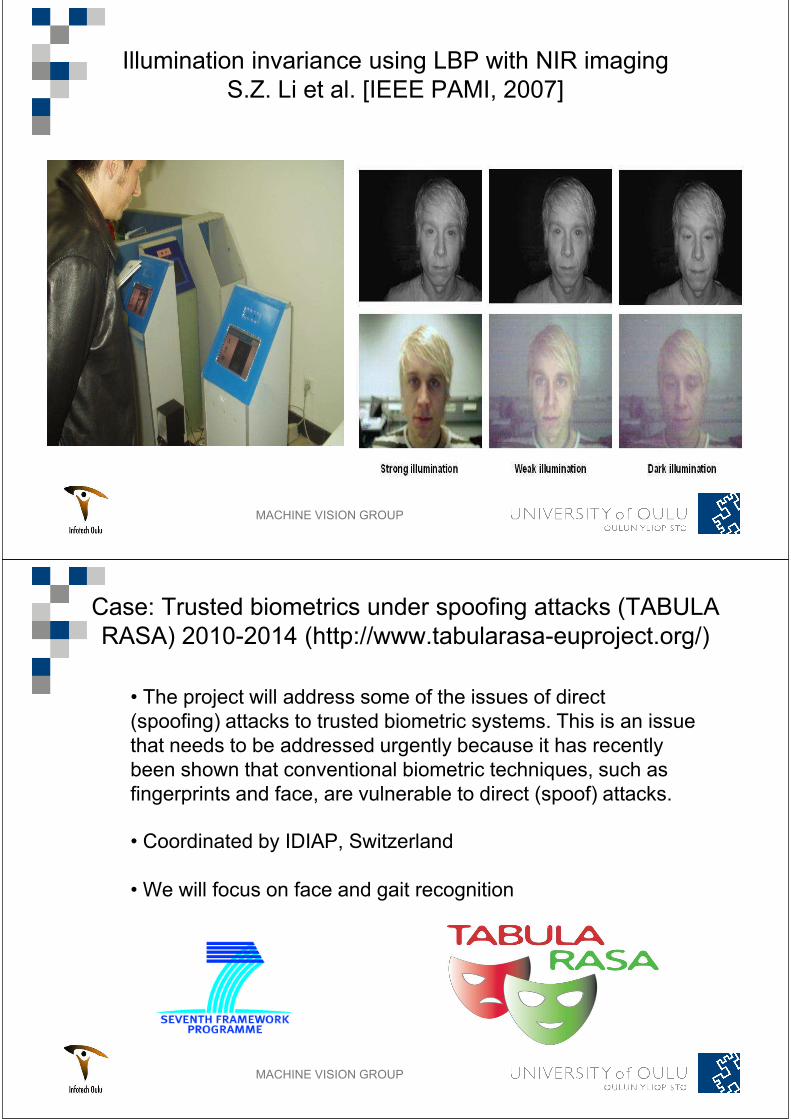
Illumination invariance using LBP with NIR imaging
S.Z. Li et al. [IEEE PAMI, 2007]
MACHINE VISION GROUP
Case: Trusted biometrics under spoofing attacks (TABULA
RASA) 2010-2014 (http://www.tabularasa-euproject.org/)
The project will address some of the issues of direct
(spoofing) attacks to trusted biometric systems. This is an issue
that needs to be addressed urgently because it has recently
been shown that conventional biometric techniques, such as
fingerprints and face, are vulnerable to direct (spoof) attacks.
Coordinated by IDIAP, Switzerland
We will focus on face and gait recognition
MACHINE VISION GROUP
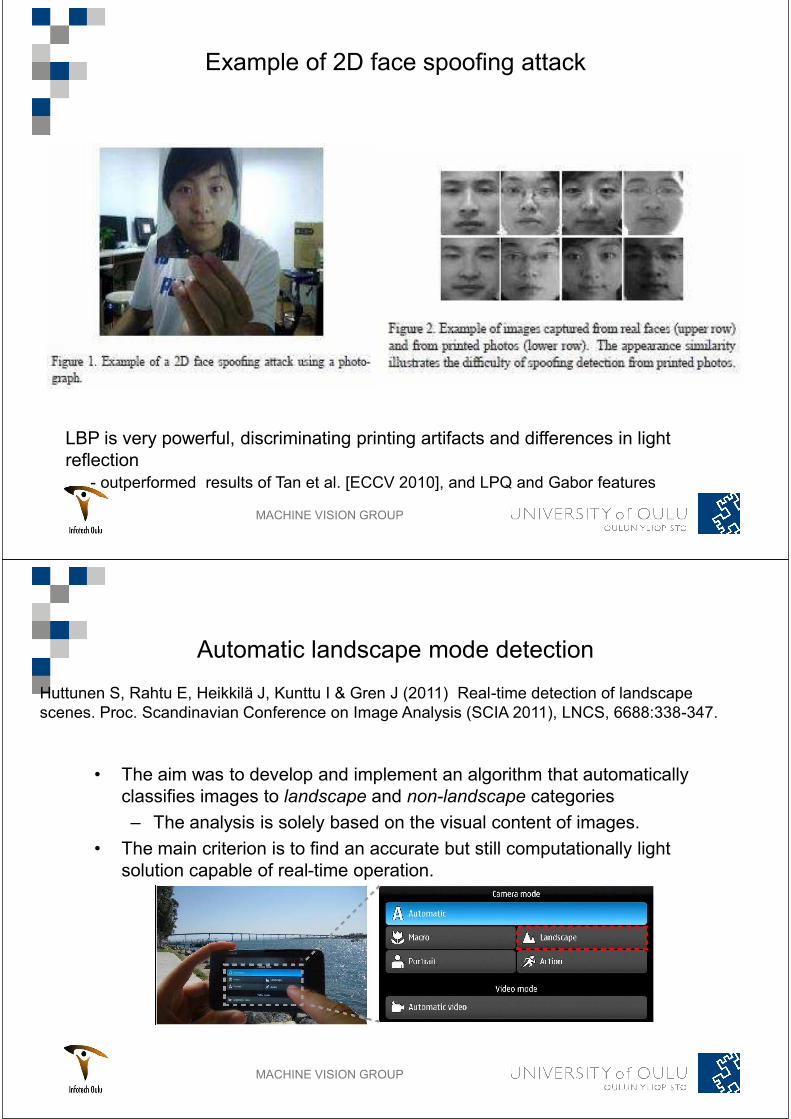
Example of 2D face spoofing attack
LBP is very powerful, discriminating printing artifacts and differences in light
reflection
- outperformed results of Tan et al. [ECCV 2010], and LPQ and Gabor features
MACHINE VISION GROUP
Automatic landscape mode detection
The aim was to develop and implement an algorithm that automatically
classifies images to landscape and non-landscape categories
The analysis is solely based on the visual content of images.
The main criterion is to find an accurate but still computationally light
solution capable of real-time operation.
Huttunen S, Rahtu E, Heikkilä J, Kunttu I & Gren J (2011) Real-time detection of landscape
scenes. Proc. Scandinavian Conference on Image Analysis (SCIA 2011), LNCS, 6688:338-347.
MACHINE VISION GROUP
Landscape vs. non-landscape
Definition of landscape and non-landscape images is not
straightforward
If there are no distinct and easily separable objects present in a
natural scene, the image is classified as landscape
The non-landscape branch consists of indoor scenes and other
images containing man-made objects at relatively close distance
MACHINE VISION GROUP
Data set
The images used for training and testing were downloaded from the
PASCAL Visual Object Classes (VOC2007) database and the Flickr
site
All the images were manually labeled and resized to QVGA
(320x240).
Training: 1115 landscape images and
2617 non-landscape images
Testing: 912 and 2140, respectively
MACHINE VISION GROUP
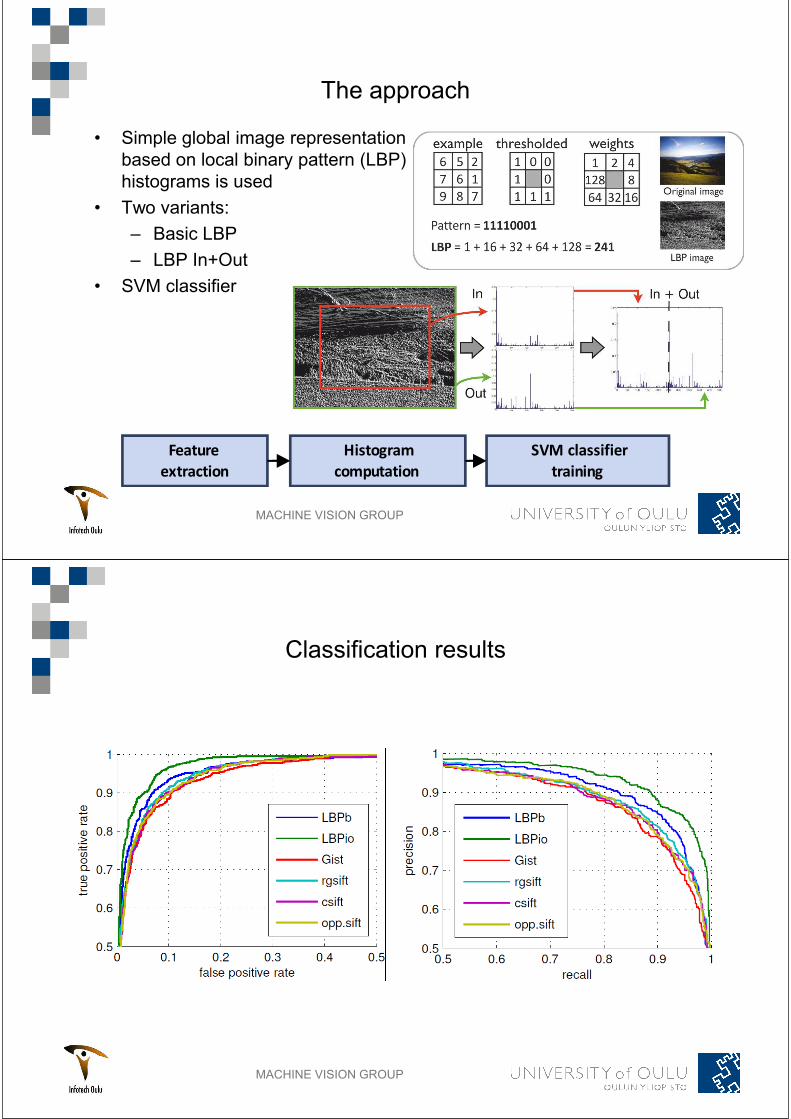
The approach
Simple global image representation
based on local binary pattern (LBP)
histograms is used
Two variants:
Basic LBP
LBP In+Out
SVM classifier
Histogram
computation
SVM classifier
training
Feature
extraction
MACHINE VISION GROUP
Classification results
MACHINE VISION GROUP
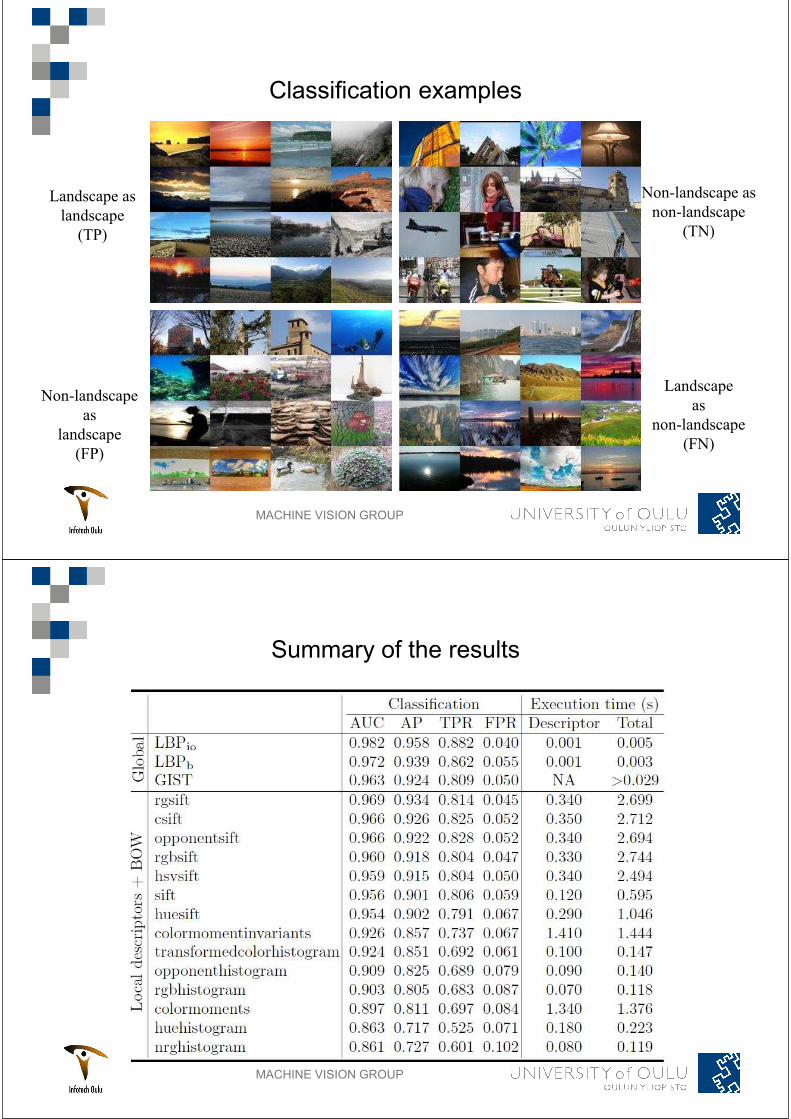
Classification examples
Landscape as
landscape
(TP)
Non-landscape
as
landscape
(FP)
Non-landscape as
non-landscape
(TN)
Landscape
as
non-landscape
(FN)
MACHINE VISION GROUP
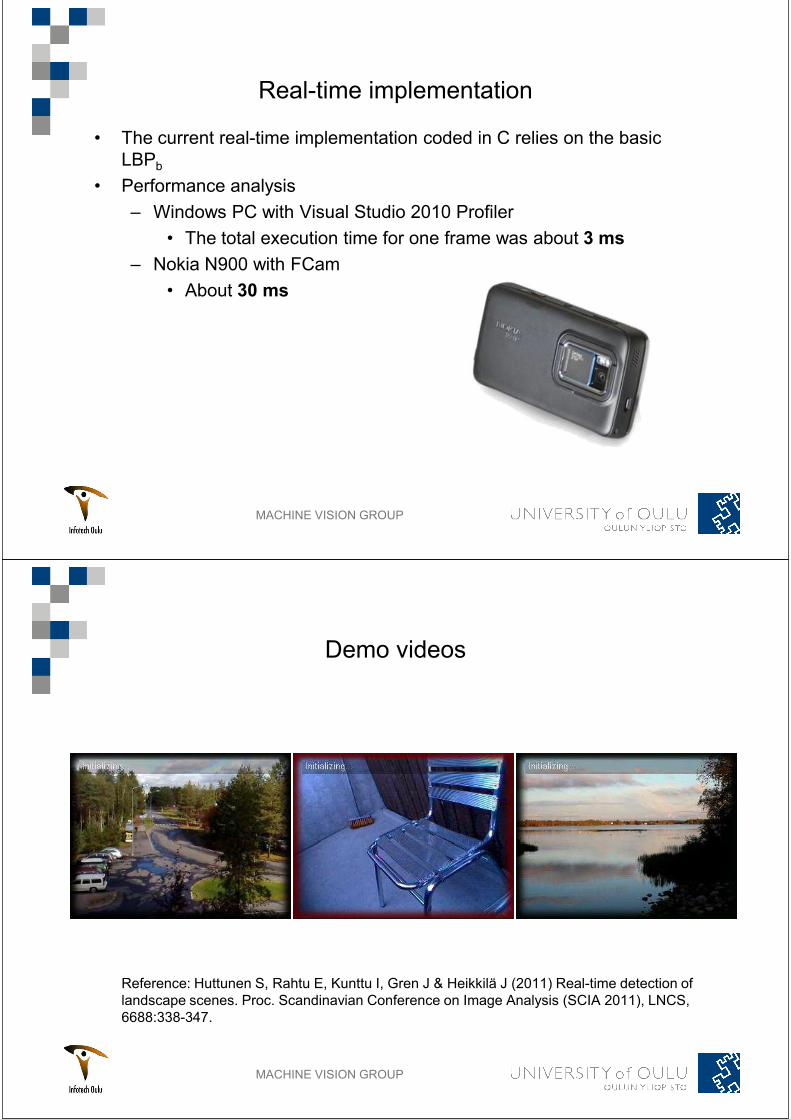
Summary of the results
MACHINE VISION GROUP
Real-time implementation
The current real-time implementation coded in C relies on the basic
LBPb
Performance analysis
Windows PC with Visual Studio 2010 Profiler
The total execution time for one frame was about 3 ms
Nokia N900 with FCam
About 30 ms
MACHINE VISION GROUP
Demo videos
Reference: Huttunen S, Rahtu E, Kunttu I, Gren J & Heikkilä J (2011) Real-time detection of
landscape scenes. Proc. Scandinavian Conference on Image Analysis (SCIA 2011), LNCS,
6688:338-347.
MACHINE VISION GROUP
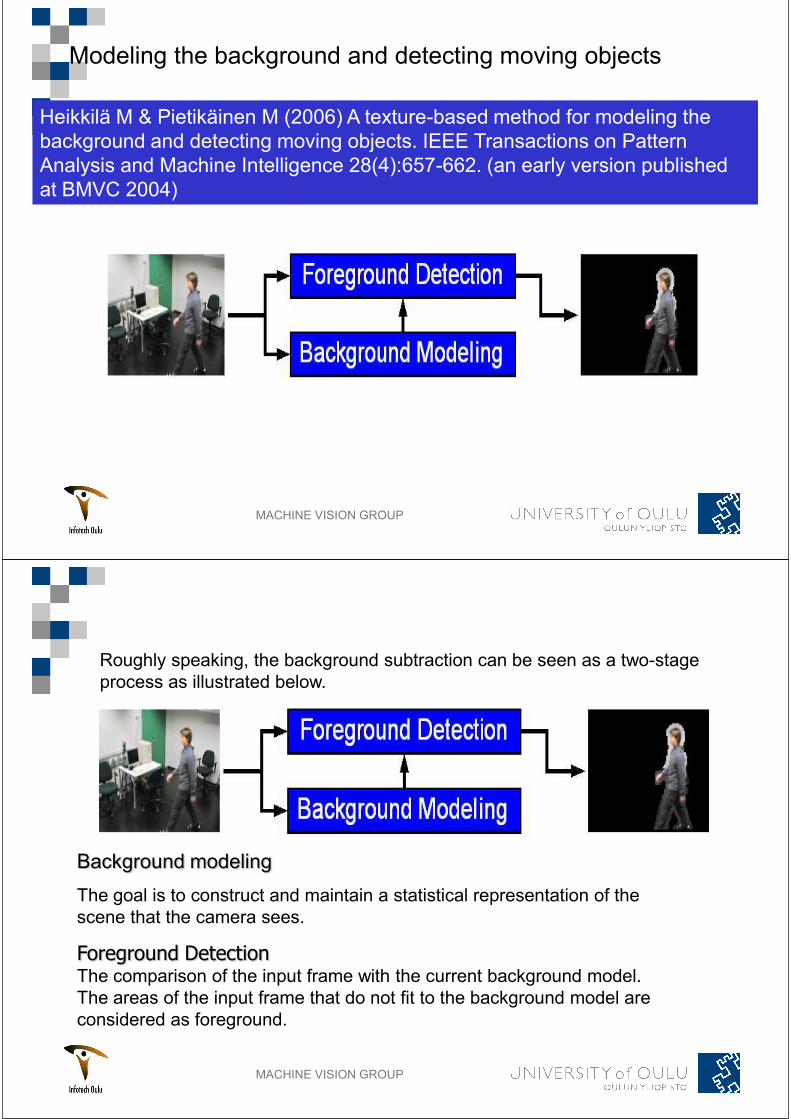
Modeling the background and detecting moving objects
Heikkilä M & Pietikäinen M (2006) A texture-based method for modeling the
background and detecting moving objects. IEEE Transactions on Pattern
Analysis and Machine Intelligence 28(4):657-662. (an early version published
at BMVC 2004)
MACHINE VISION GROUP
Roughly speaking, the background subtraction can be seen as a two-stage
process as illustrated below.
Background modeling
The goal is to construct and maintain a statistical representation of the
scene that the camera sees.
Foreground DetectionThe comparison of the input frame with the current background model.
The areas of the input frame that do not fit to the background model are
considered as foreground.
MACHINE VISION GROUP
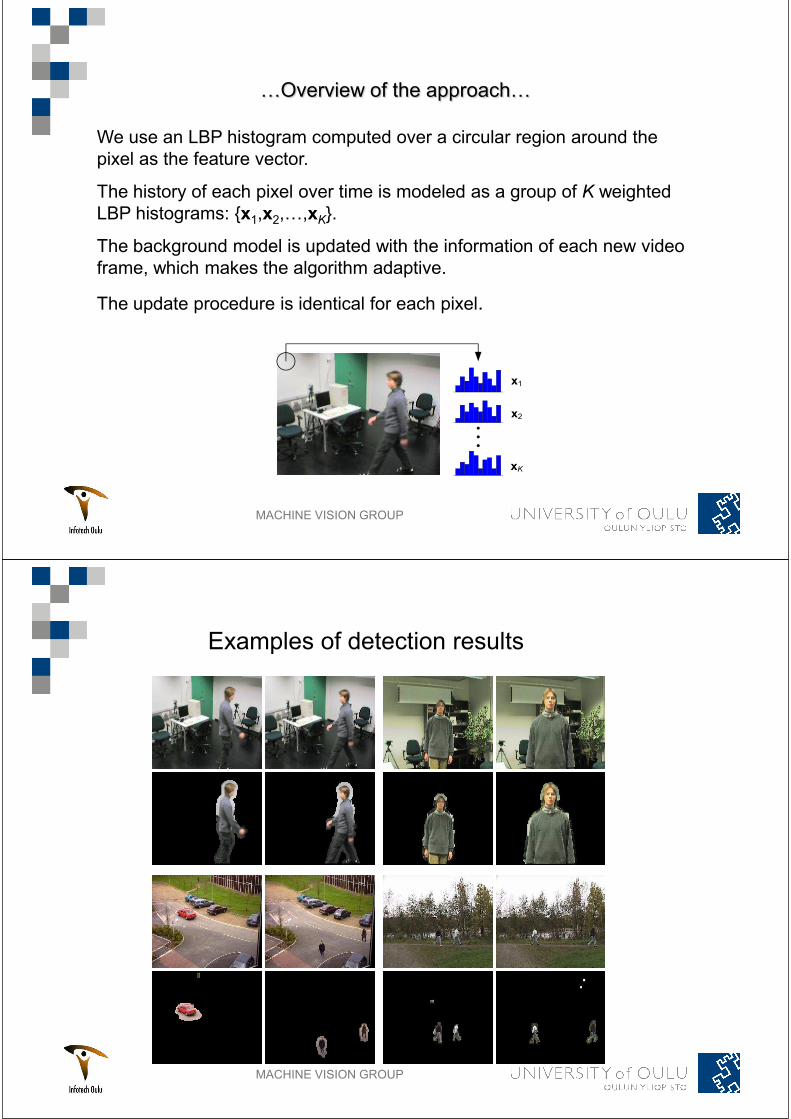
We use an LBP histogram computed over a circular region around the
pixel as the feature vector.
The history of each pixel over time is modeled as a group of K weighted
LBP histograms: {x1,x2 xK}.
The background model is updated with the information of each new video
frame, which makes the algorithm adaptive.
The update procedure is identical for each pixel.
x1
x2
xK
MACHINE VISION GROUP
Examples of detection results

MACHINE VISION GROUP
Detection results for images of Toyama et al. (ICCV 1999)
MACHINE VISION GROUP
Demo for detection of moving objects
MACHINE VISION GROUP
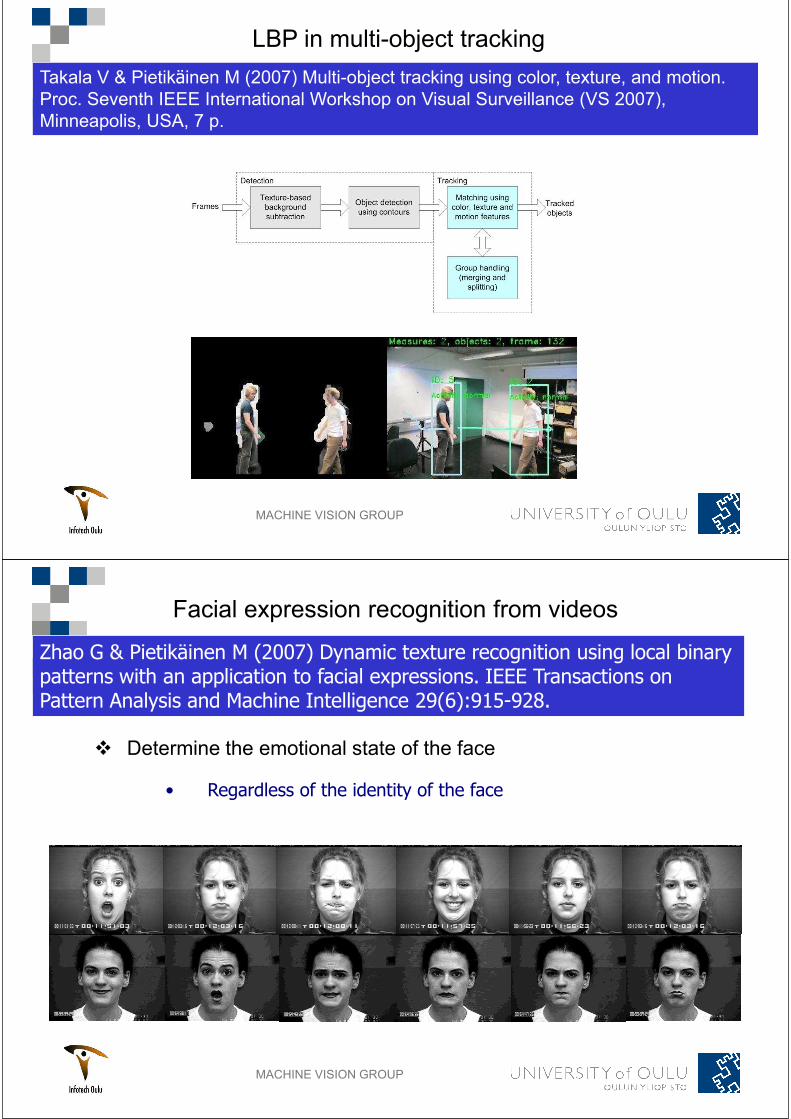
LBP in multi-object tracking
Takala V & Pietikäinen M (2007) Multi-object tracking using color, texture, and motion.
Proc. Seventh IEEE International Workshop on Visual Surveillance (VS 2007),
Minneapolis, USA, 7 p.
MACHINE VISION GROUP
Facial expression recognition from videos
Zhao G & Pietikäinen M (2007) Dynamic texture recognition using local binary patterns with an application to facial expressions. IEEE Transactions on Pattern Analysis and Machine Intelligence 29(6):915-928.
Determine the emotional state of the face
Regardless of the identity of the face
MACHINE VISION GROUP
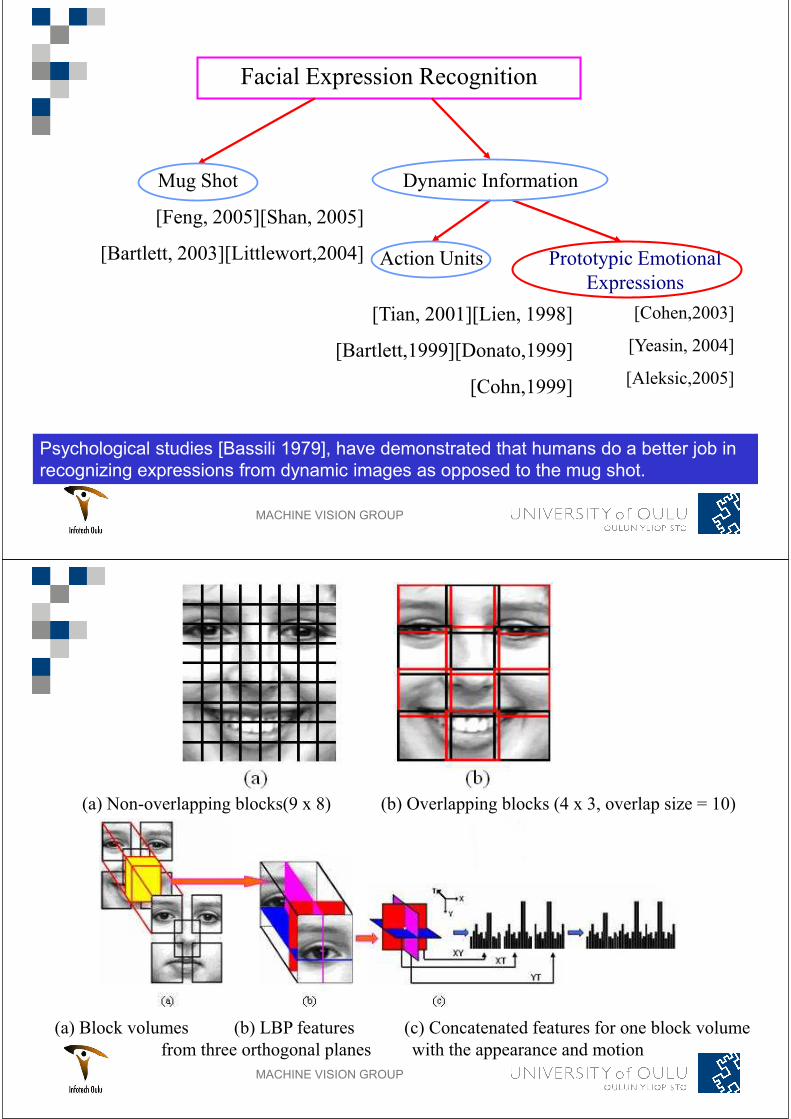
Facial Expression Recognition
Mug Shot
[Feng, 2005][Shan, 2005]
[Bartlett, 2003][Littlewort,2004]
Dynamic Information
Action Units Prototypic Emotional
Expressions
[Tian, 2001][Lien, 1998]
[Bartlett,1999][Donato,1999]
[Cohn,1999]
Psychological studies [Bassili 1979], have demonstrated that humans do a better job in
recognizing expressions from dynamic images as opposed to the mug shot.
[Cohen,2003]
[Yeasin, 2004]
[Aleksic,2005]
MACHINE VISION GROUP
(a) Non-overlapping blocks(9 x 8) (b) Overlapping blocks (4 x 3, overlap size = 10)
(a) Block volumes (b) LBP features (c) Concatenated features for one block volume
from three orthogonal planes with the appearance and motion
MACHINE VISION GROUP
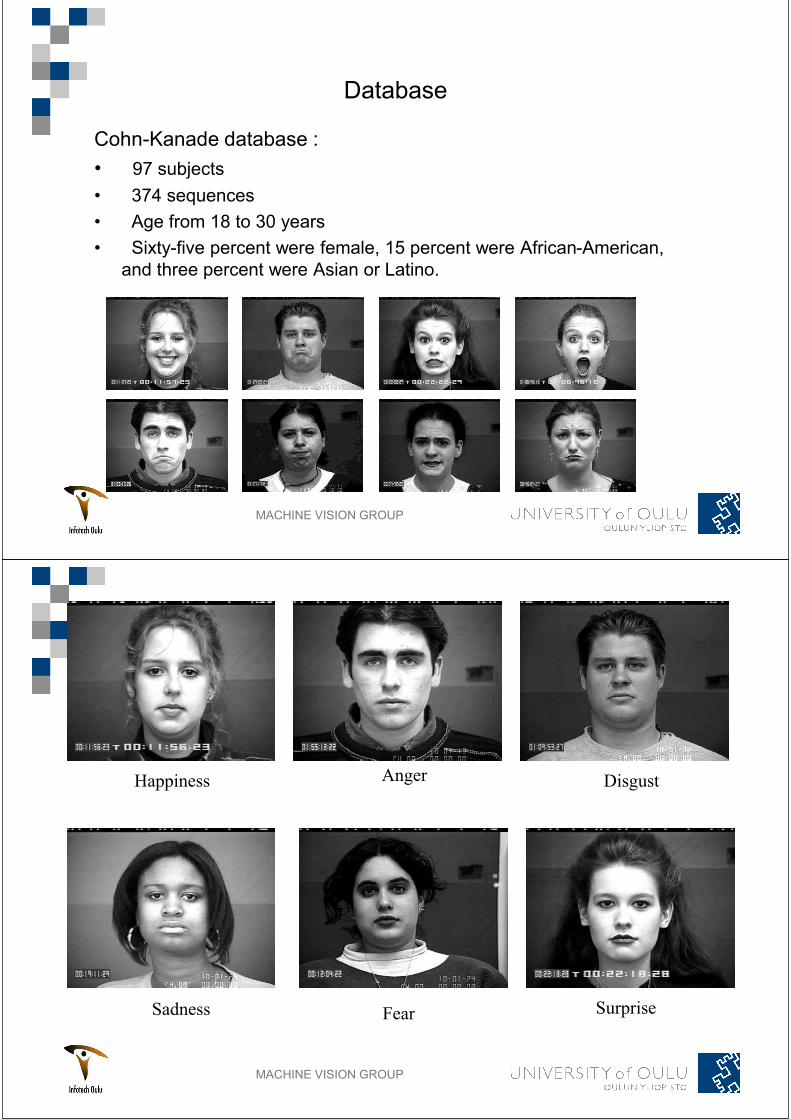
Database
Cohn-Kanade database :
97 subjects
374 sequences
Age from 18 to 30 years
Sixty-five percent were female, 15 percent were African-American,
and three percent were Asian or Latino.
MACHINE VISION GROUP
Happiness Anger Disgust
Sadness Fear Surprise
MACHINE VISION GROUP
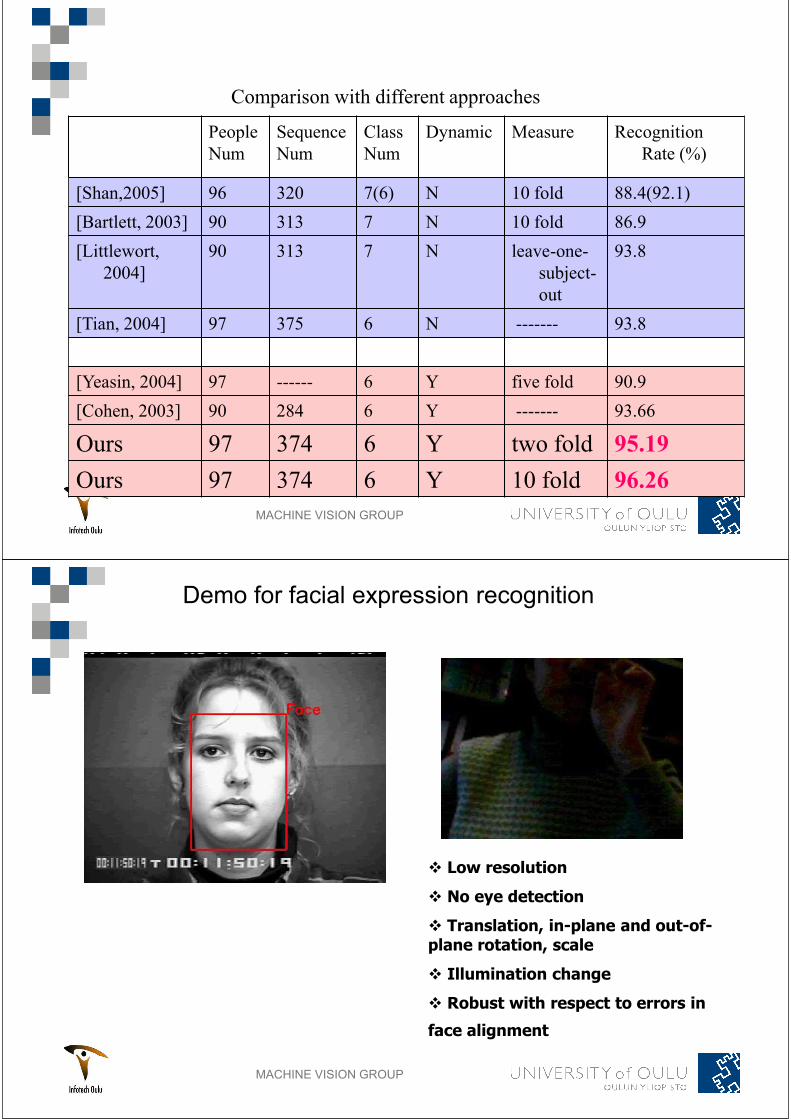
Comparison with different approaches
People
Num
Sequence
Num
Class
Num
Dynamic Measure Recognition
Rate (%)
[Shan,2005] 96 320 7(6) N 10 fold 88.4(92.1)
[Bartlett, 2003] 90 313 7 N 10 fold 86.9
[Littlewort,
2004]
90 313 7 N leave-one-
subject-
out
93.8
[Tian, 2004] 97 375 6 N ------- 93.8
[Yeasin, 2004] 97 ------ 6 Y five fold 90.9
[Cohen, 2003] 90 284 6 Y ------- 93.66
Ours 97 374 6 Y two fold 95.19
Ours 97 374 6 Y 10 fold 96.26
MACHINE VISION GROUP
Demo for facial expression recognition
Low resolution
No eye detection
Translation, in-plane and out-of-plane rotation, scale
Illumination change
Robust with respect to errors in
face alignment
MACHINE VISION GROUP
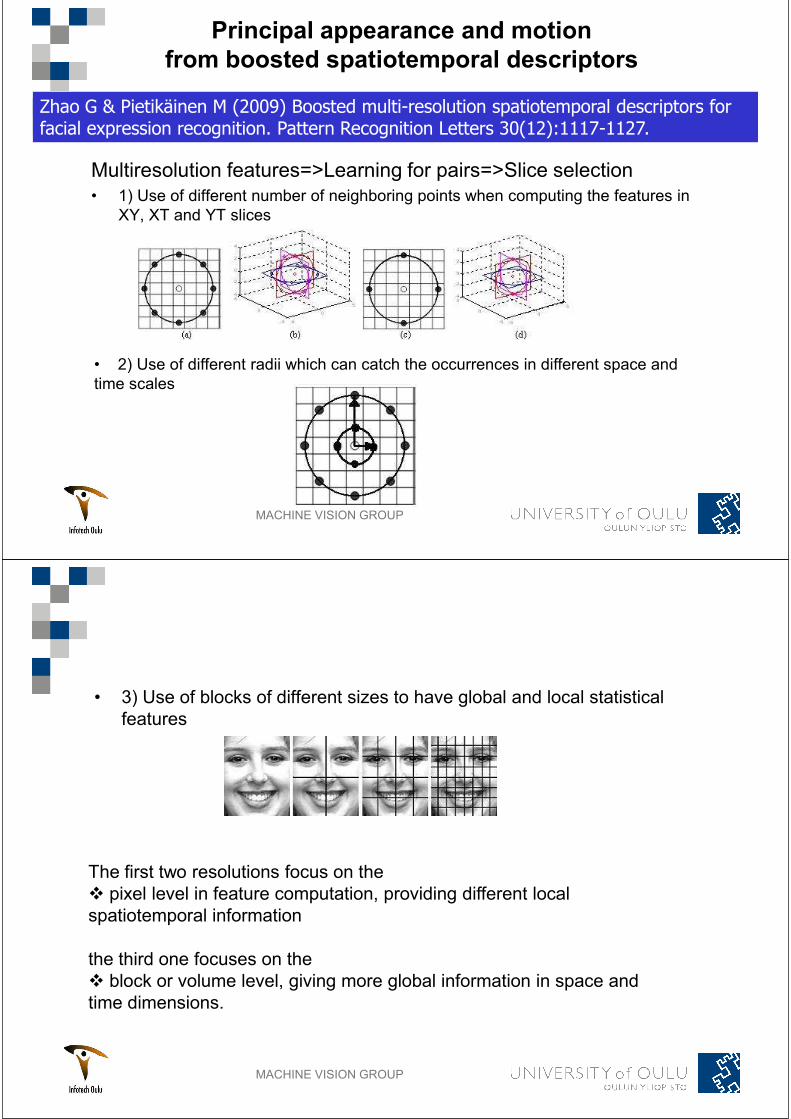
Principal appearance and motion
from boosted spatiotemporal descriptors
Multiresolution features=>Learning for pairs=>Slice selection
1) Use of different number of neighboring points when computing the features in
XY, XT and YT slices
2) Use of different radii which can catch the occurrences in different space and
time scales
Zhao G & Pietikäinen M (2009) Boosted multi-resolution spatiotemporal descriptors forfacial expression recognition. Pattern Recognition Letters 30(12):1117-1127.
MACHINE VISION GROUP
3) Use of blocks of different sizes to have global and local statistical
features
The first two resolutions focus on the
pixel level in feature computation, providing different local
spatiotemporal information
the third one focuses on the
block or volume level, giving more global information in space and
time dimensions.
MACHINE VISION GROUP
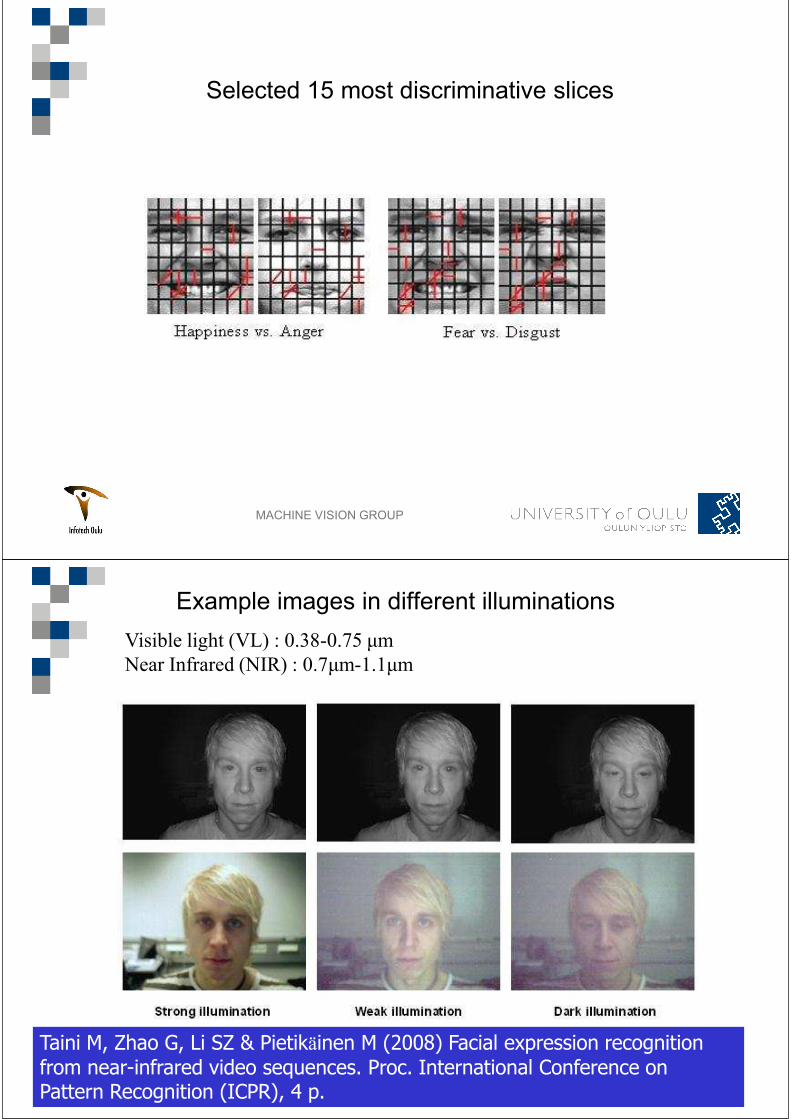
Selected 15 most discriminative slices
MACHINE VISION GROUP
Example images in different illuminations
Taini M, Zhao G, Li SZ & Pietikäinen M (2008) Facial expression recognition
from near-infrared video sequences. Proc. International Conference on Pattern Recognition (ICPR), 4 p.
Visible light (VL) : 0.38-0.75 m
Near Infrared (NIR) : 0.7 m-1.1 m
MACHINE VISION GROUP
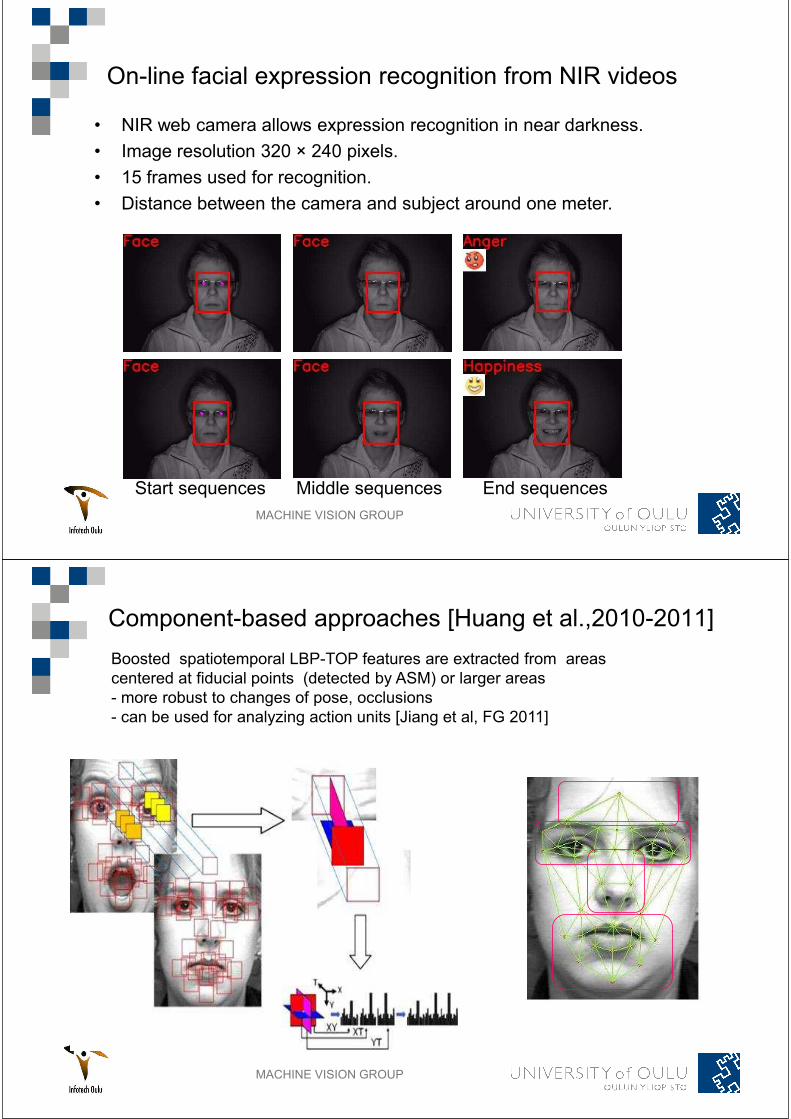
On-line facial expression recognition from NIR videos
NIR web camera allows expression recognition in near darkness.
Image resolution 320 × 240 pixels.
15 frames used for recognition.
Distance between the camera and subject around one meter.
Start sequences Middle sequences End sequences
MACHINE VISION GROUP
Component-based approaches [Huang et al.,2010-2011]
Boosted spatiotemporal LBP-TOP features are extracted from areas
centered at fiducial points (detected by ASM) or larger areas
- more robust to changes of pose, occlusions
- can be used for analyzing action units [Jiang et al, FG 2011]
MACHINE VISION GROUP
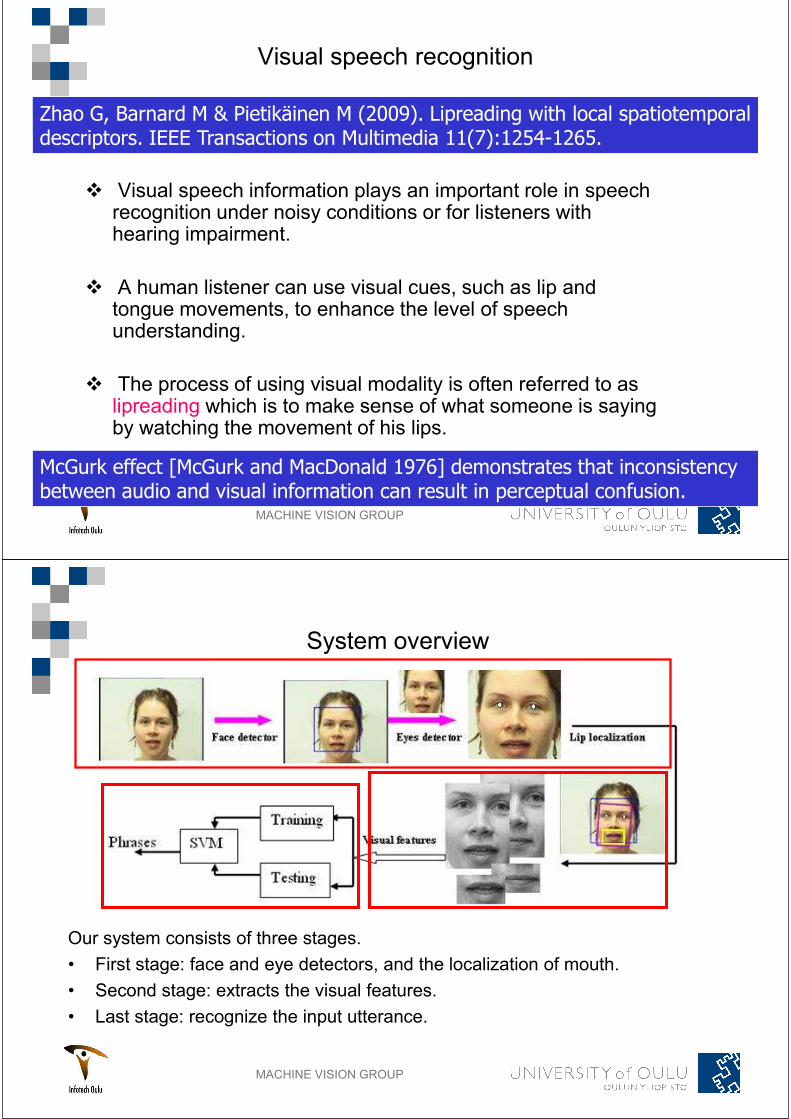
Visual speech recognition
Visual speech information plays an important role in speech recognition under noisy conditions or for listeners with hearing impairment.
A human listener can use visual cues, such as lip and tongue movements, to enhance the level of speech understanding.
The process of using visual modality is often referred to as lipreading which is to make sense of what someone is saying by watching the movement of his lips.
McGurk effect [McGurk and MacDonald 1976] demonstrates that inconsistency between audio and visual information can result in perceptual confusion.
Zhao G, Barnard M & Pietikäinen M (2009). Lipreading with local spatiotemporal descriptors. IEEE Transactions on Multimedia 11(7):1254-1265.
MACHINE VISION GROUP
System overview
Our system consists of three stages.
First stage: face and eye detectors, and the localization of mouth.
Second stage: extracts the visual features.
Last stage: recognize the input utterance.
MACHINE VISION GROUP
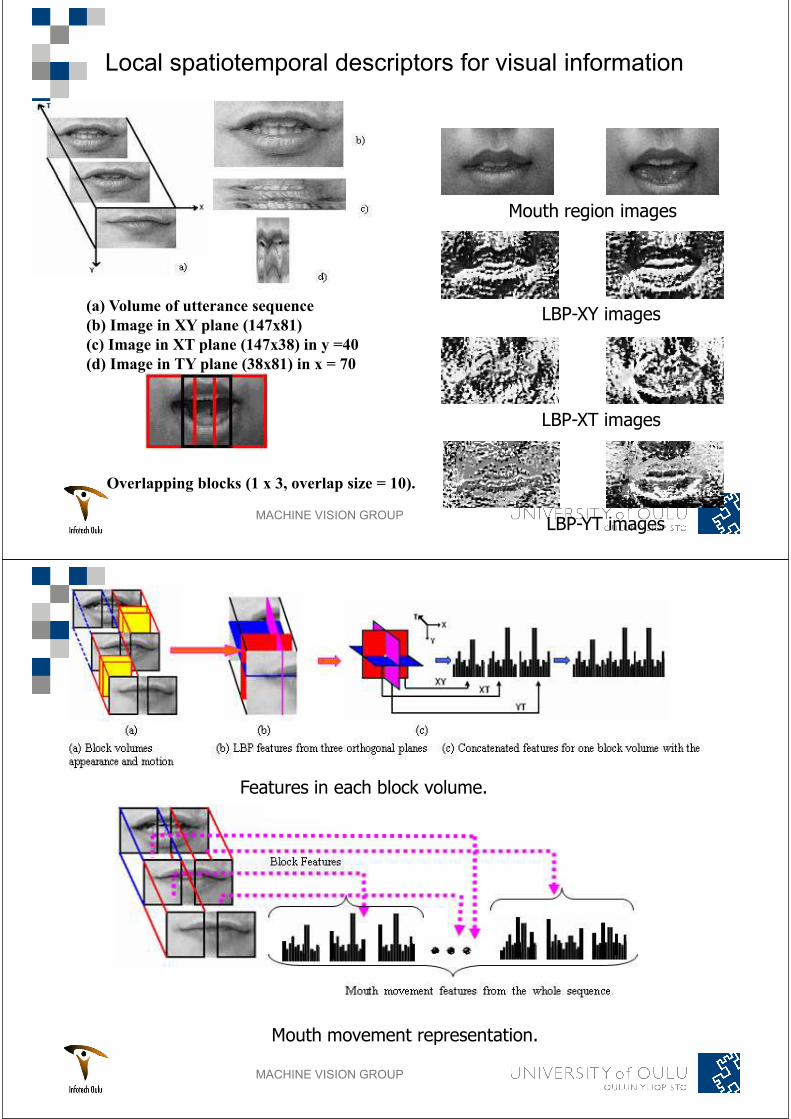
Local spatiotemporal descriptors for visual information
(a) Volume of utterance sequence
(b) Image in XY plane (147x81)
(c) Image in XT plane (147x38) in y =40
(d) Image in TY plane (38x81) in x = 70
Overlapping blocks (1 x 3, overlap size = 10).
LBP-YT images
Mouth region images
LBP-XY images
LBP-XT images
MACHINE VISION GROUP
Features in each block volume.
Mouth movement representation.
MACHINE VISION GROUP
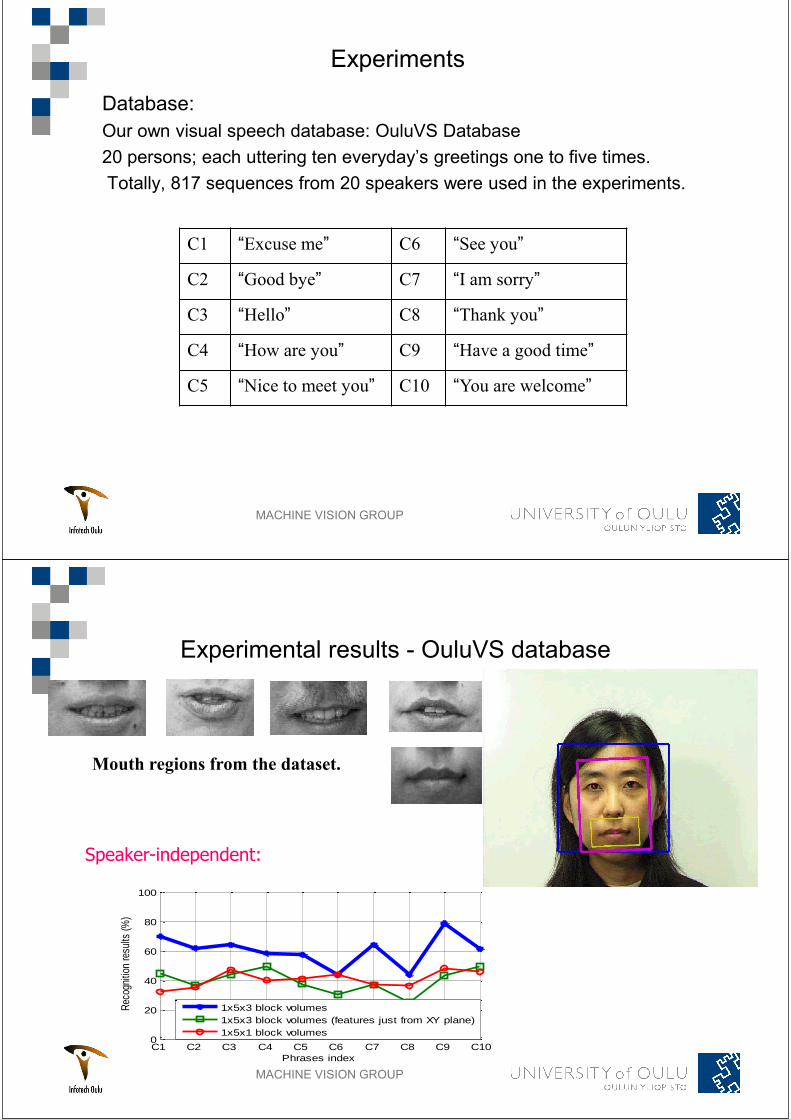
Experiments
Database:
Our own visual speech database: OuluVS Database
Totally, 817 sequences from 20 speakers were used in the experiments.
C1 Excuse me C6 See you
C2 Good bye C7 I am sorry
C3 Hello C8 Thank you
C4 How are you C9 Have a good time
C5 Nice to meet you C10 You are welcome
MACHINE VISION GROUP
Experimental results - OuluVS database
Mouth regions from the dataset.
Speaker-independent:
C1 C2 C3 C4 C5 C6 C7 C8 C9 C100
20
40
60
80
100
Phrases index
Reco
gniti
on re
sults
(%)
1x5x3 block volumes1x5x3 block volumes (features just from XY plane)1x5x1 block volumes
MACHINE VISION GROUP
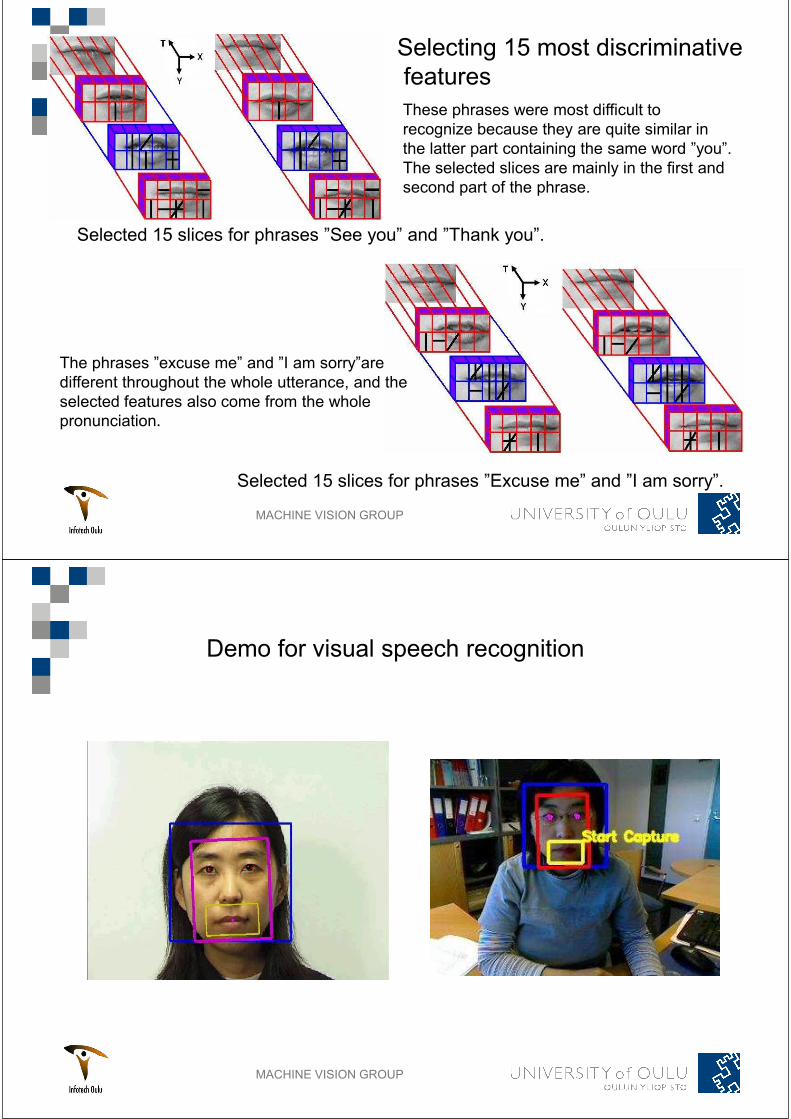
Selected 15 slices for phrases See you Thank you
These phrases were most difficult to
recognize because they are quite similar in
The selected slices are mainly in the first and
second part of the phrase.
different throughout the whole utterance, and the
selected features also come from the whole
pronunciation.
Selecting 15 most discriminative
features
MACHINE VISION GROUP
Demo for visual speech recognition
MACHINE VISION GROUP
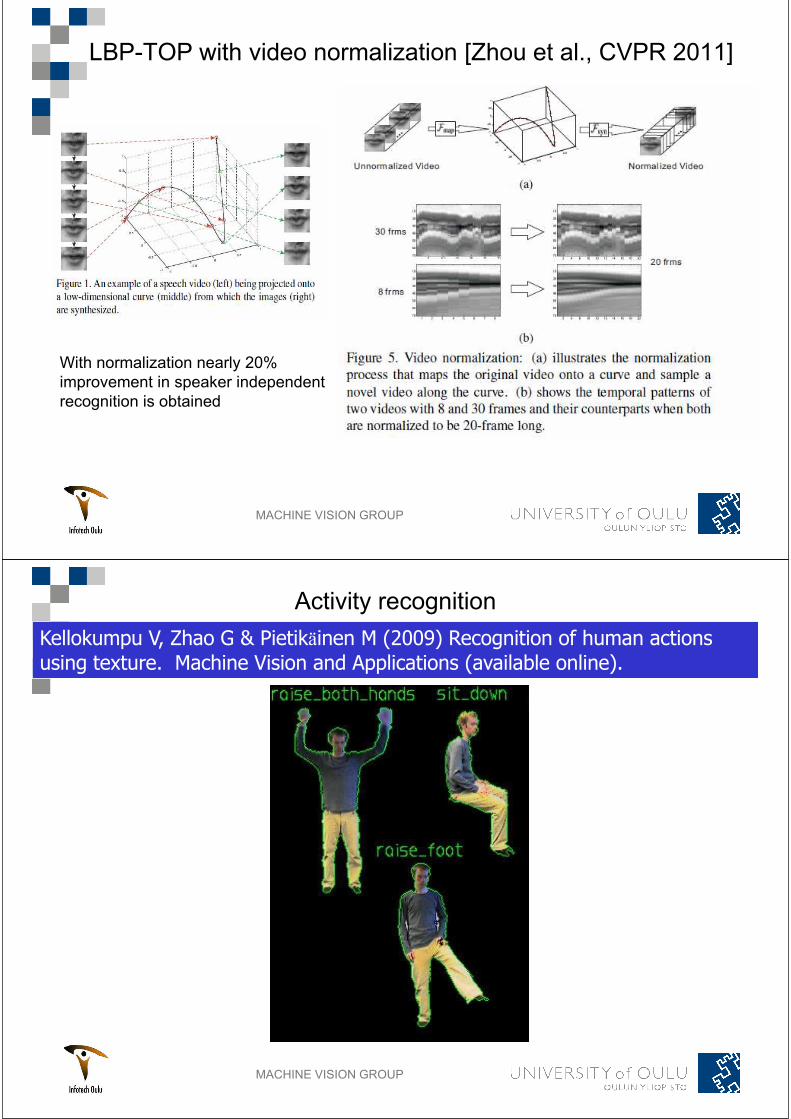
LBP-TOP with video normalization [Zhou et al., CVPR 2011]
With normalization nearly 20%
improvement in speaker independent
recognition is obtained
MACHINE VISION GROUP
Activity recognition
Kellokumpu V, Zhao G & Pietikäinen M (2009) Recognition of human actions
using texture. Machine Vision and Applications (available online).
MACHINE VISION GROUP
Texture based description of movements
We want to represent human movement with local
properties
> Texture
But texture in an image can be anything? (clothing, scene
background)
> Need preprocessing for movement representation
> We use temporal templates to capture the dynamics
We propose to extract texture features from temporal templates
to obtain a short term motion description of human movement.
Kellokumpu V, Zhao G & Pietikäinen M (2008) Texture based description of
movements for activity analysis. Proc. International Conference on Computer Vision Theory and Applications (VISAPP), 1:206-213.
MACHINE VISION GROUP
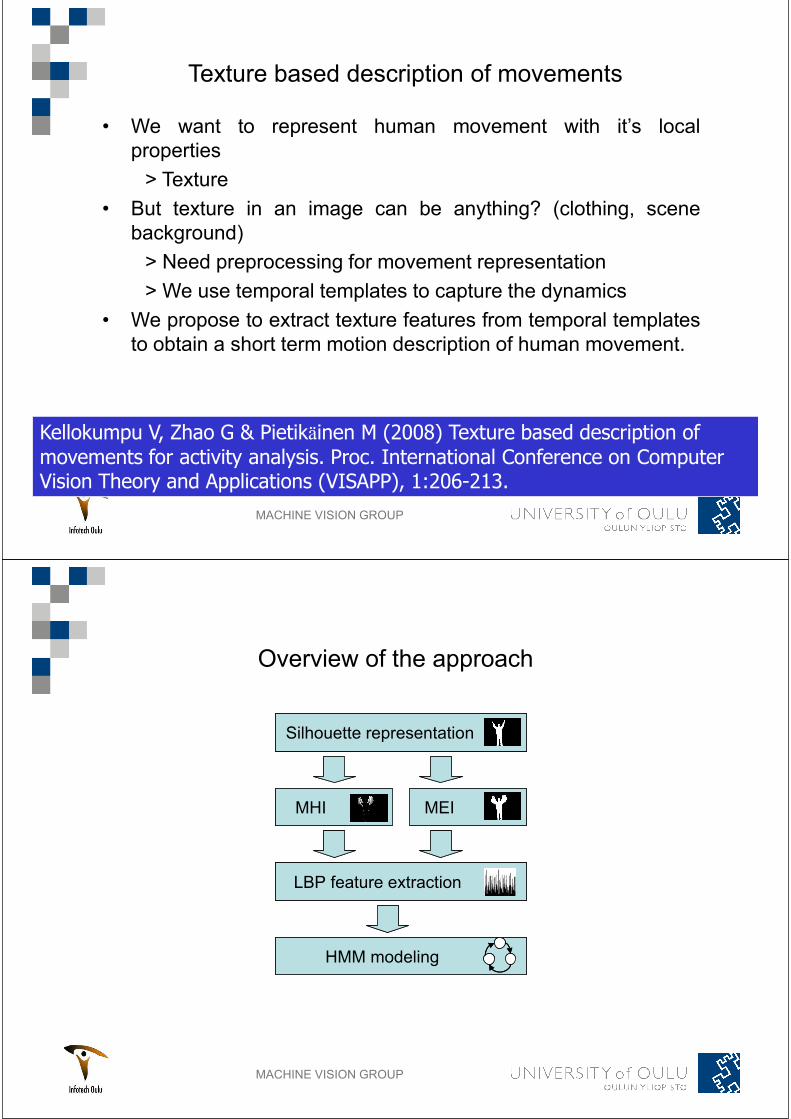
Overview of the approach
Silhouette representation
LBP feature extraction
HMM modeling
MHI MEI
Silhouette representation
LBP feature extraction
HMM modeling
MHI MEI
MACHINE VISION GROUP
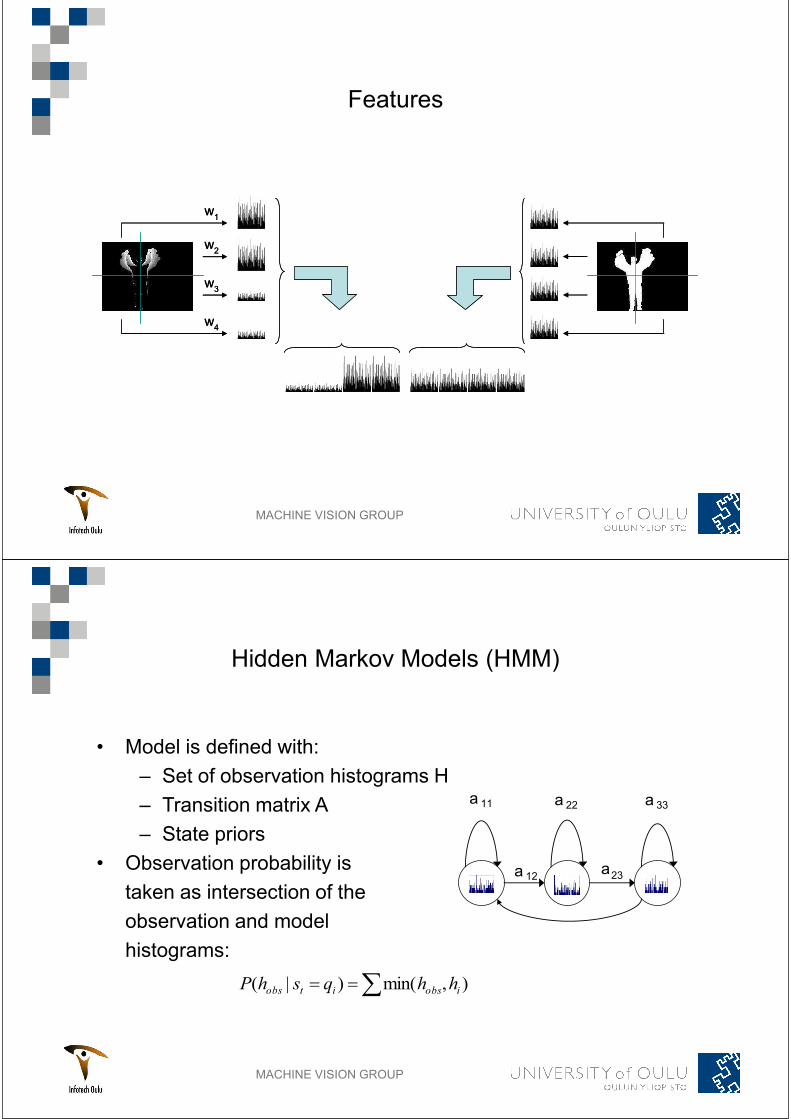
Features
w
w
w
w
1
2
3
4
w
w
w
w
1
2
3
4
MACHINE VISION GROUP
Hidden Markov Models (HMM)
Model is defined with:
Set of observation histograms H
Transition matrix A
State priors
Observation probability is
taken as intersection of the
observation and model
histograms:
),min()|( iobsitobs hhqshP
a23
a 11 a 22 a 33
a 12
MACHINE VISION GROUP
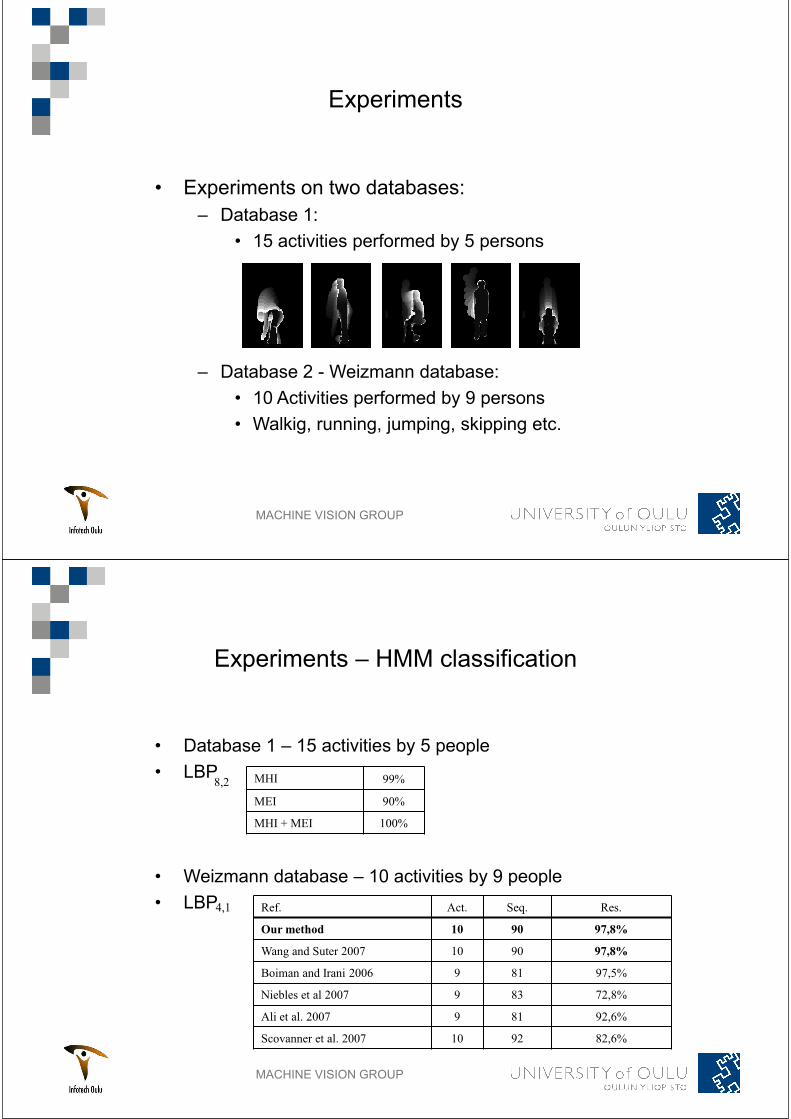
Experiments
Experiments on two databases:
Database 1:
15 activities performed by 5 persons
Database 2 - Weizmann database:
10 Activities performed by 9 persons
Walkig, running, jumping, skipping etc.
MACHINE VISION GROUP
Experiments HMM classification
Database 1 15 activities by 5 people
LBP
Weizmann database 10 activities by 9 people
LBP Ref. Act. Seq. Res.
Our method 10 90 97,8%
Wang and Suter 2007 10 90 97,8%
Boiman and Irani 2006 9 81 97,5%
Niebles et al 2007 9 83 72,8%
Ali et al. 2007 9 81 92,6%
Scovanner et al. 2007 10 92 82,6%
MHI 99%
MEI 90%
MHI + MEI 100%
8,2
4,1
MACHINE VISION GROUP
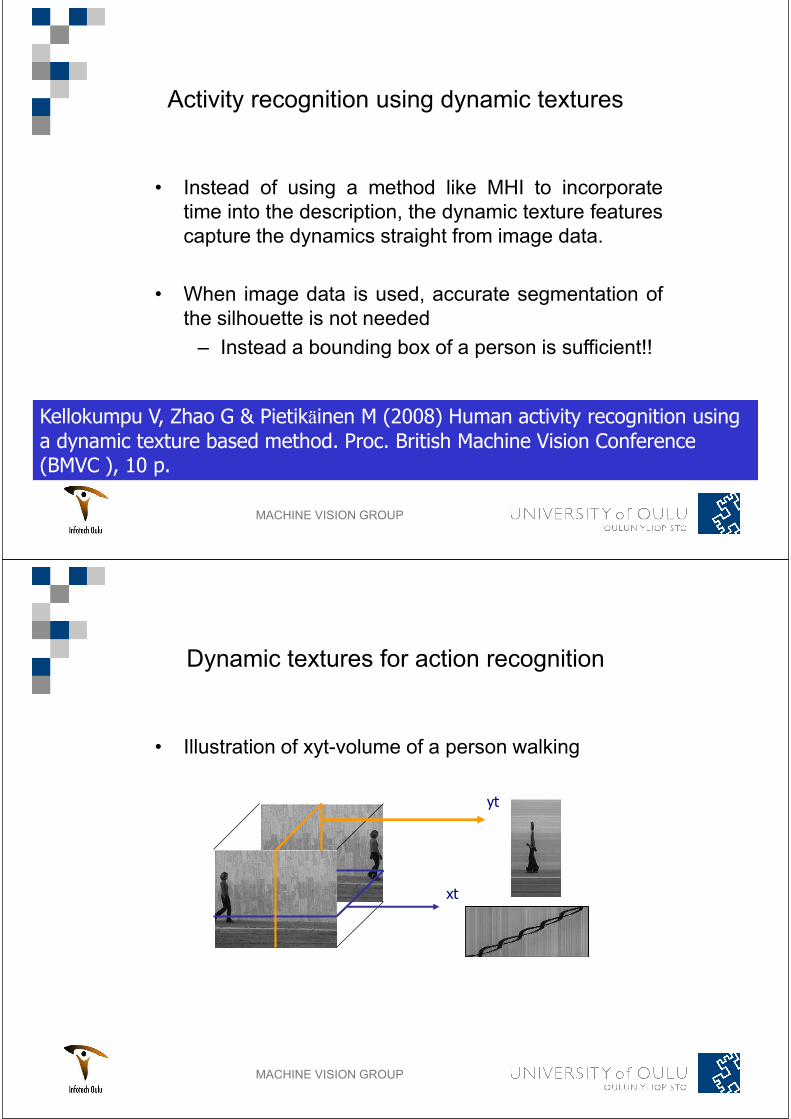
Activity recognition using dynamic textures
Instead of using a method like MHI to incorporate
time into the description, the dynamic texture features
capture the dynamics straight from image data.
When image data is used, accurate segmentation of
the silhouette is not needed
Instead a bounding box of a person is sufficient!!
Kellokumpu V, Zhao G & Pietikäinen M (2008) Human activity recognition using
a dynamic texture based method. Proc. British Machine Vision Conference (BMVC ), 10 p.
MACHINE VISION GROUP
Dynamic textures for action recognition
Illustration of xyt-volume of a person walking
yt
xt
MACHINE VISION GROUP
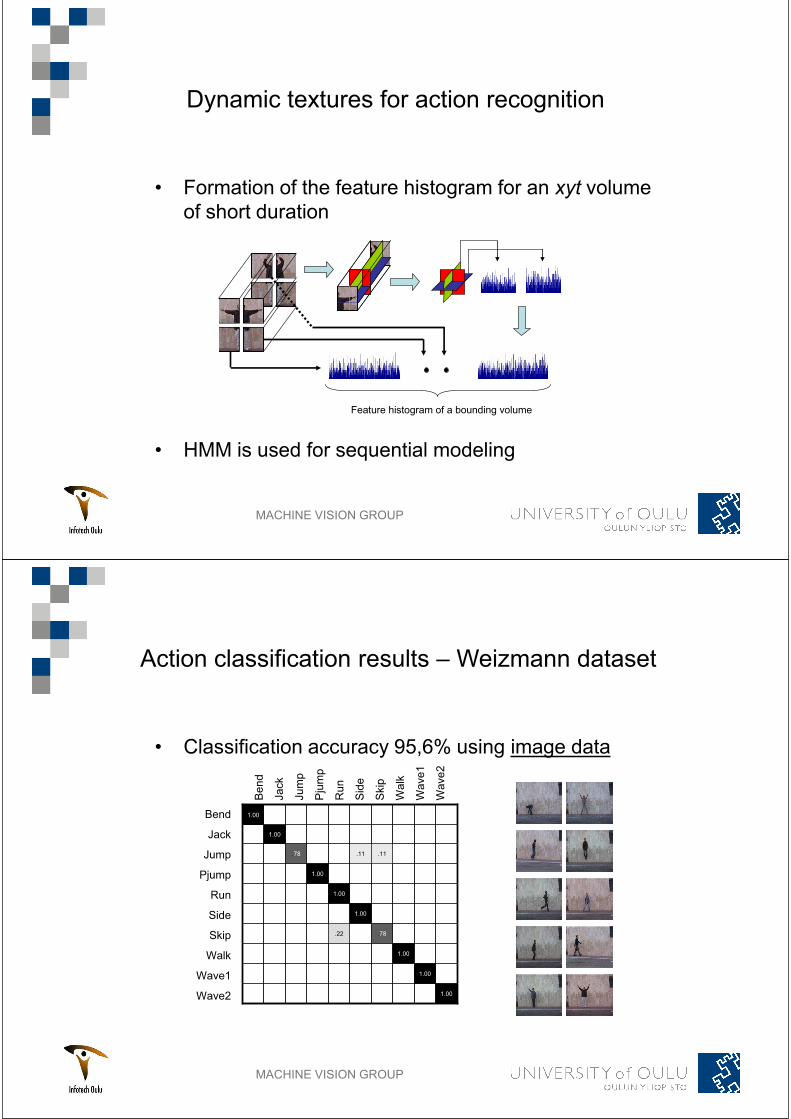
Dynamic textures for action recognition
Formation of the feature histogram for an xyt volume
of short duration
HMM is used for sequential modeling
Feature histogram of a bounding volume
MACHINE VISION GROUP
Action classification results Weizmann dataset
Classification accuracy 95,6% using image data
1.00
1.00
1.00
.78.22
1.00
1.00
1.00
.11.11.78
1.00
1.00
1.00
1.00
1.00
.78.22
1.00
1.00
1.00
.11.11.78
1.00
1.00Bend
Jack
Jump
Pjump
Run
Side
Skip
Walk
Wave1
Wave2
Bend
Jack
Jum
p
Pju
mp
Run
Sid
e
Skip
Walk
Wave1
Wave2
MACHINE VISION GROUP
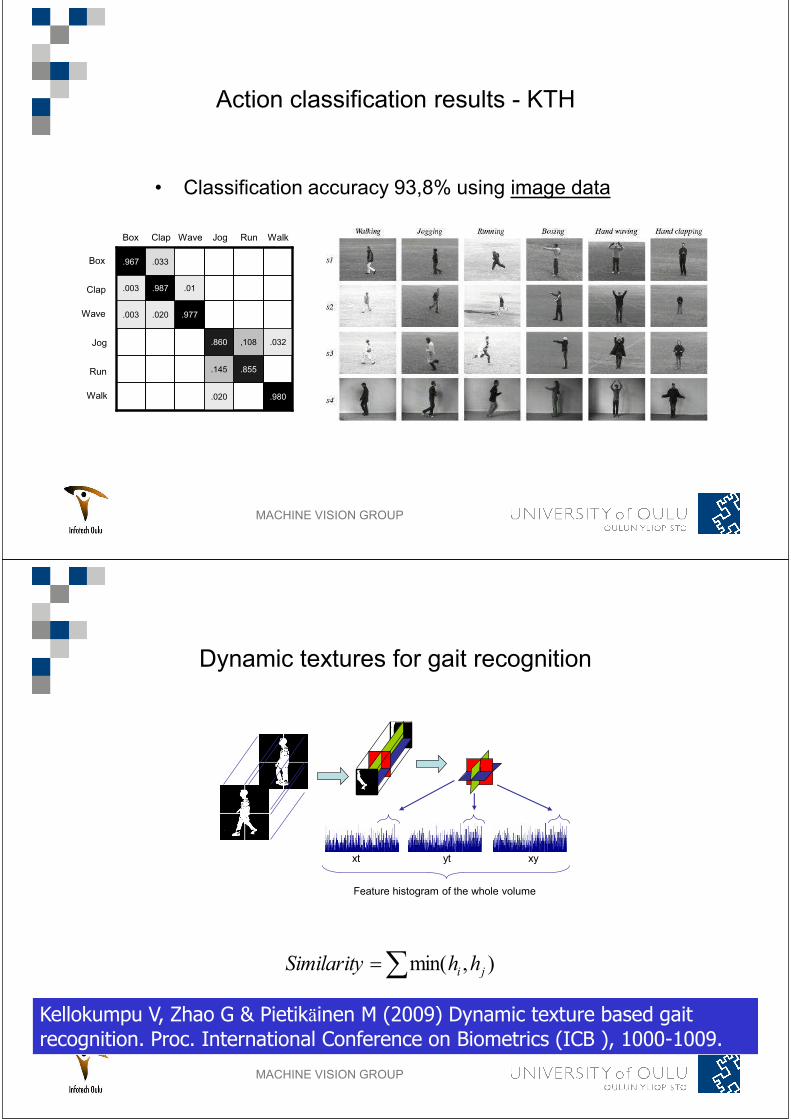
Action classification results - KTH
.980.020
.855.145
.032,108.860
.977.020.003
.01.987.003
.033.967
.980.020
.855.145
.032,108.860
.977.020.003
.01.987.003
.033.967
Box Clap Wave Jog Run Walk
Clap
Wave
Jog
Run
Walk
Box
Classification accuracy 93,8% using image data
MACHINE VISION GROUP
Dynamic textures for gait recognition
Feature histogram of the whole volume
xt xyyt
),min( ji hhSimilarity
Kellokumpu V, Zhao G & Pietikäinen M (2009) Dynamic texture based gait
recognition. Proc. International Conference on Biometrics (ICB ), 1000-1009.
MACHINE VISION GROUP
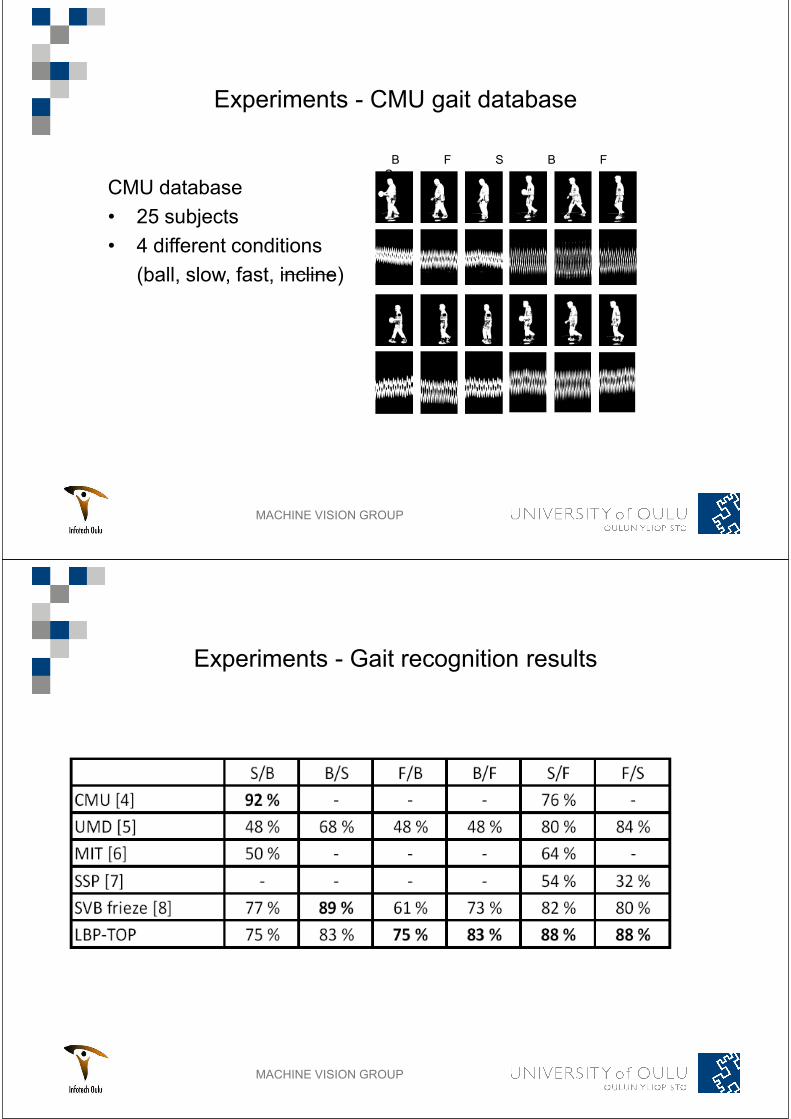
Experiments - CMU gait database
CMU database
25 subjects
4 different conditions
(ball, slow, fast, incline)
B F S B F
S
MACHINE VISION GROUP
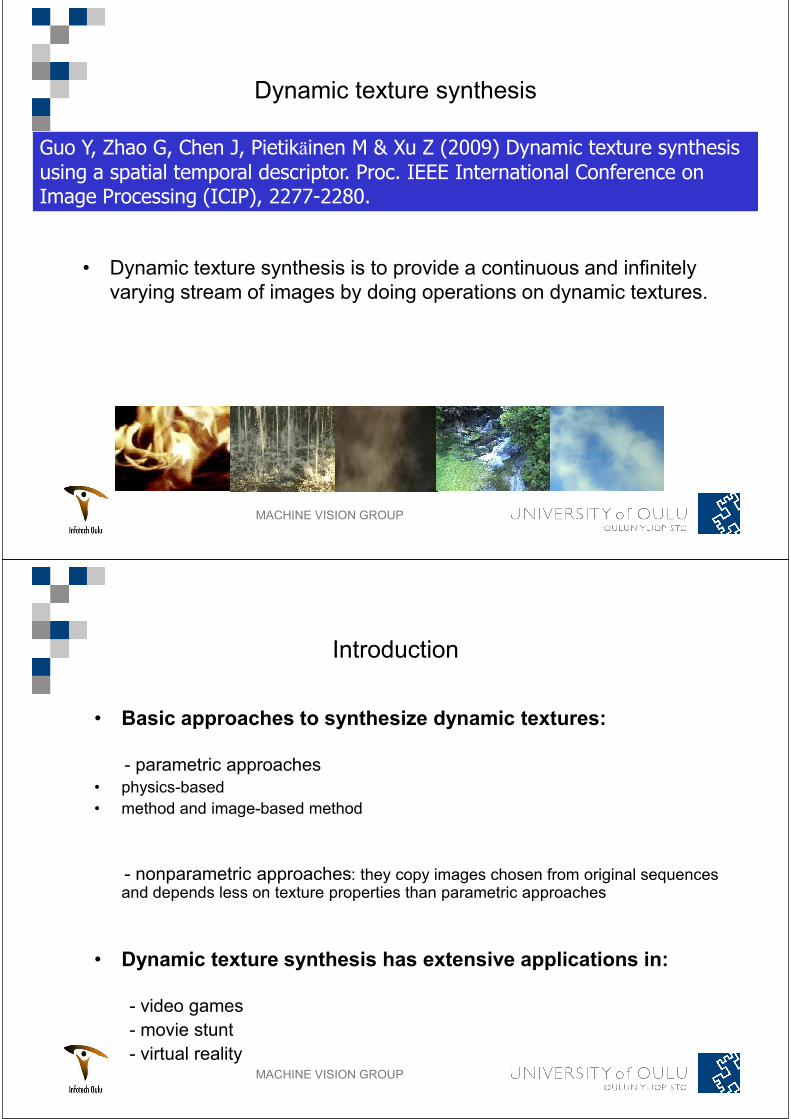
Experiments - Gait recognition results
MACHINE VISION GROUP
Dynamic texture synthesis
Guo Y, Zhao G, Chen J, Pietikäinen M & Xu Z (2009) Dynamic texture synthesis
using a spatial temporal descriptor. Proc. IEEE International Conference on Image Processing (ICIP), 2277-2280.
Dynamic texture synthesis is to provide a continuous and infinitely
varying stream of images by doing operations on dynamic textures.
MACHINE VISION GROUP
Introduction
Basic approaches to synthesize dynamic textures:
- parametric approaches
physics-based
method and image-based method
- nonparametric approaches: they copy images chosen from original sequences and depends less on texture properties than parametric approaches
Dynamic texture synthesis has extensive applications in:
- video games
- movie stunt
- virtual reality
MACHINE VISION GROUP
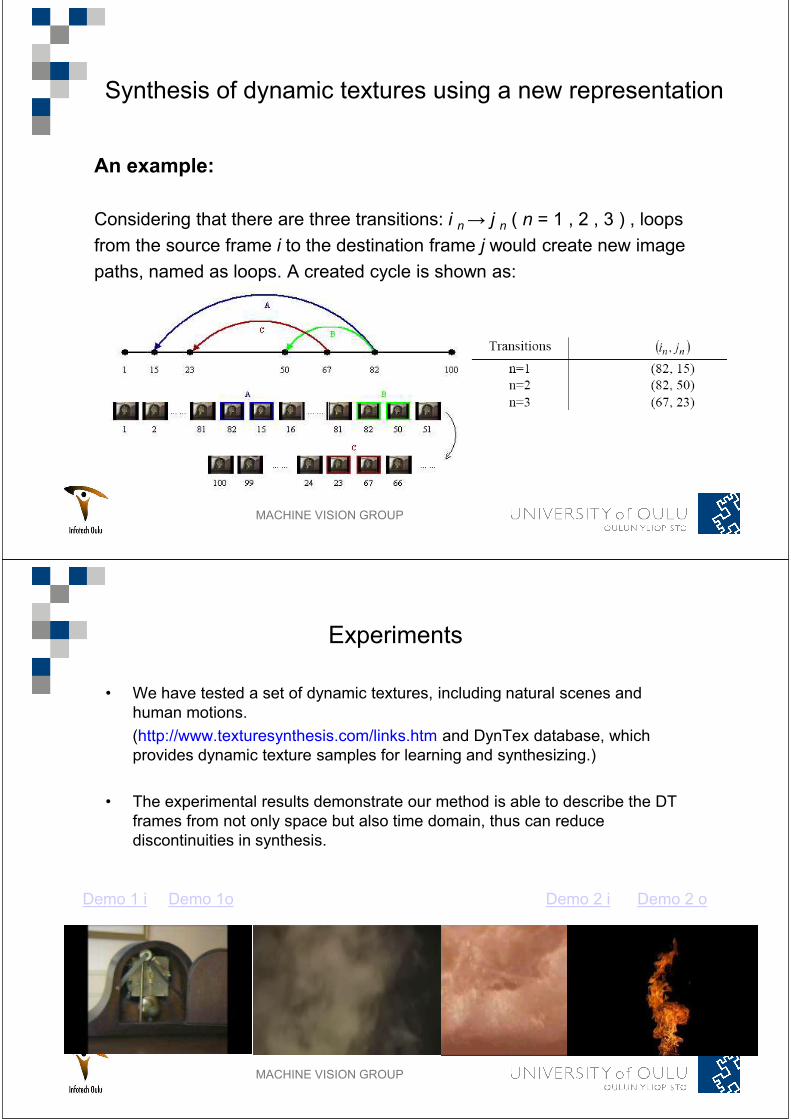
Synthesis of dynamic textures using a new representation
- The basic idea is to create transitions from frame i to frame j anytime the successor of i is similar to j, that is, whenever Di+1, j is small.
A. Schödl, R. Szeliski, D. Salesin, and I. Essa
Proc. ACM SIGGRAPH, pp. 489-498, 2000.
MACHINE VISION GROUP
When transitions of video texture
are identified, video frames are
played by video loops
Match subsequences by filtering the difference matrix Dij
with a diagonal kernel with weights
[w m,...,wm
Distance measure can be updated by
summing future anticipated costs
Calculate the concatenated local binary pattern
histograms from three orthogonal planes for each
frame of the input video
Compute the similarity measure Dij between frame
pair Ii and I j by applying Chi-square to the
histogram of representation
- The algorithm of the dynamic texture synthesis:
1. Frame representation;
2. Similarity measure;
3. Distance mapping;
4. Preserving dynamics;
5. Avoid dead ends;
6. Synthesis
To create transitions from frame i to j when i is similar
to j , all these distances are mapped to probabilities
through an exponential function Pij. The next frame to
display after i is selected according to the distribution
of Pij.
MACHINE VISION GROUP
Synthesis of dynamic textures using a new representation
An example:
Considering that there are three transitions: i n j n ( n = 1 , 2 , 3 ) , loops
from the source frame i to the destination frame j would create new image
paths, named as loops. A created cycle is shown as:
MACHINE VISION GROUP
Experiments
We have tested a set of dynamic textures, including natural scenes and
human motions.
(http://www.texturesynthesis.com/links.htm and DynTex database, which
provides dynamic texture samples for learning and synthesizing.)
The experimental results demonstrate our method is able to describe the DT
frames from not only space but also time domain, thus can reduce
discontinuities in synthesis.
Demo 1oDemo 1 i Demo 2 i Demo 2 o
MACHINE VISION GROUP
Experiments
Dynamic texture synthesis of natural scenes concerns temporal
changes in pixel intensities, while human motion synthesis
concerns temporal changes of body parts.
The synthesized sequence by our method maintains smooth
dynamic behaviors. The better performance demonstrates its
ability to synthesize complex human motions.
MACHINE VISION GROUP
Detection and tracking of objects
- Object detection [Zhang et al., IVC 2006]
- Human detection [Mu et al., CVPR 2008; Wang et al., ICCV 2009]
- On-line boosting [Grabner & Bishof, CVPR 2006]
Biometrics
- Fingerprint matching [Nanni & Lumini, PR 2008]
- Finger vein recognition [Lee et al., IJIST 2009]
- Touch-less palmprint recognition [Ong et al., IVC 2008]
- Gait recognition [Kellokumpu et al., 2009]
- Eye localization [Kroon et al., CVIU 2009]
- Face recognition in the wild [Wolf et al., ECCV 2008]
- Face verification in web image and video search [Wang et al., CVPR 2009]
Examples of using LBP in different applications
MACHINE VISION GROUP
Visual inspection
- Paper characterization [Turtinen et al.., IJAMT 2003]
- Separating black walnut meat from shell [Jin et al., JFE 2008 2009]
- Fabric defect detection [Tajeripur et al., EURASIP JASP 2008]
Biomedical applications
- Cell phenotype classification [Nanni & Lumini, Artif. Intell. Med. 2008]
- Diagnosis of renal cell carcinoma [Fuchs et al., MICCAI 2008]
- Ulcer detection in capsule endoscope images [Li & Meng, IVC 2009]
- Mass false positive reduct. in mammographic images [Llado et al., CMIG 2009]
- Lung texture analysis in CT images [Sorensen et al., IEEE TMI 2010]
- Retrieval of brain MR images [Unay et al., IEEE TITM 2010]
- Quantitative analysis of facial paralysis [He et al., IEEE TBE 2009]
MACHINE VISION GROUP
Video analysis, photo management, and interactive TV
- Concept detection [Wu et al., ICIP 2008; Li et al., CVPR 2008]
- Overlay text detection and extraction from videos [Kim & KIM, IEEE TIP 2009]
- Crowd estimation [Ma et al., ISIITA 2008]
- EasyAlbum interactive photo annotation system [Cui et al.,CM CHI 2007]
- Cognitive face analysis for interactive TV [Ho An & Chung, IEEE TCE 2009]
MACHINE VISION GROUP
Part 5: Summary and some future directions
Matti Pietikäinen
MACHINE VISION GROUP
Summary
Modern texture operators form a generic tool for computer vision
LBP and its variants are very effective for various tasks in computer
vision
The choice between LBP and LPQ depends on the problem at hand
The advantages of the LBP and its variants include
- computationally very simple
- can be easily tailored to different types of problems
- robust to illumination variations
- robust to localization errors
LPQ is also insensitive to image blurring
For a bibliography of LBP-related research, see
http://www.cse.oulu.fi/MVG/LBP_Bibliography
MACHINE VISION GROUP
Some future directions
New LBP/LPQ variants are still emerging
Often a single descriptor is not effective enough
Multi-scale processing
Use of complementary descriptors
- CLBP, Gabor&LBP, SIFT&LBP, HOG&LBP, LPQ&LBP
Combining local with more global information (e.g. LBP & Gabor)
Combining texture and color
Combining sparse and dense descriptors
Machine learning for finding the most effective descriptors for
a given problem
Dynamic textures offer a new approach to motion analysis
- general constraints of motion analysis (i.e. scene is Lambertian, rigid
and static) can be relaxed
MACHINE VISION GROUP
A book on LBP will be published by fall 2011
MACHINE VISION GROUP
Thanks!