data-compatible t-matrix completion (dctmc)€¦ · data-compatible t-matrix completion (dctmc) ......
TRANSCRIPT

Data-Compatible T-Matrix Completion (DCTMC)
and a few examples of exactly-solvable nonlinear inverse toy problems
Vadim A Markel (Institut Fresnel, on leave from UPenn)
joint work with
Howard W. Levinson (formerly at UPenn, currently at UMich Math)

Three resistor problem
1R
3R
2R

1 1 2 3
2 2 1 3
3 3 1 2
1 1 1
1 1 1
1 1 1
Z R R R
Z R R R
Z R R R
1 2 3
1 2 3
The nonlinear system of equations to determine
the unknown resistors , , from the
measurements of resistance between all pairs
of vertices, , ,
R R R
Z Z Z

22
1 2 3
1 1
1 2 3
22
2 1 3
2 2
2 1 3
22
3 1 2
3 3
3 1 2
Inverse solution:
1
2 ( )
1
2 ( )
1
2 ( )
Z Z ZR Z
Z Z Z
Z Z ZR Z
Z Z Z
Z Z ZR Z
Z Z Z

2 1 3 1Density plots of solutions as functions of / and /Z Z Z Z
2 1/Z Z2 1/Z Z 2 1/Z Z
3
1
Z
Z
3 1/R Z2 1/R Z1 1/R Z

Linearization:
1 1
2 2
3 3
Let (1 ) where 1 and is known
3Let new definition of the datapoint
2
Then
1 1/ 4 1/ 4
1/ 4 1 1/ 4
1/ 4 1/ 4 1
This is a well-posed linear pr
n n n
n
n
R R R
R
Z
oblem (matrix is invertible).

Simplest inverse scattering problem: Two scatterers
1 1 2 1 1 1 2 2
2 2 1 2 2 1 1 2
( ) ( )
( ) ( )
d A gd E D B d B d
d A gd E D B d B d

1 2 21 2
1 1 1
1 2 2 11 2
1 2
2 1 1 22 2
1 2
2
1 2
( ) ( )Let , and 1
Then the nonlinear equations are:
(1 ) (1 )
1
(1 ) (1 )
1
If we multiply both sides by 1 , the syste
E D E D B
AB AB B
g g
g
g g
g
g
1 2
m will
have a spurrious solution 1/ g

inv 2 11 2
1 2
inv 1 22 2
2 1
inv inv
1 2
1 2
Nonlinear inverse solutions:
1 ( )
1 ( )
What if =1 ?
1We will obtain the spurrious solution
(In reality a d.p. is unphysical in thi
g
g
g
s case)

linlin inv2 1 11 12 lin
2
linlin inv1 2 22 22 lin
1
Linearized inverse solutions:
, 1 1
, 1 1
g
g

1 2 2 12 2
Inverse Born series convergence condition (nec.&suff.):
1 AND 11 1
g g
1
2

Region of convergence of the inverse Born series for the model parameters
1g
2g

How is the T-matrix defined in this simple case?
1 11 12
2 21 22
1 1 2 1
2 2 1 21
1 11 12
2 21 22
1
1 1
1 1
d t t A
d t t A
B B d
B B dAB
t t
t t
T

1 11 12 21 22
2 11 12 21 22
lin2 111 12 12
lin1 221 22 22
( )
( )
1
1
t t t t
t t t t
t t
t t
What do we know about the T-matrix from the data?
Row-wise sums of the T-matrix elements are known from the data (and given by the linearized inversions).

Is there a general relationship between the T-matrix and the unknowns?
1
2
1
1
Define:
00
00
Then
.......
gG V
g
T I VG V V VGV VGVGV
V I TG T
There is a one-to-one correspondence between T and V (one matrix uniquelydefines the other).
But not every T corresponds to a physically-meaningful (or even diagonal) V.

MAIN IDEA(S) OF DCTMC:
1. Use data to obtain information on the elements of the T-matrix.-- this is a linear problem-- a larger data set is factored into two much smaller data sets-- if we could find all elements of T, we would solve the nonlinear
inverse problem immediately and exactly. But in most casesdata do not allow this (requires internal measurements).
2. From the information obtain in Step 1, complete the T-matrix (find all its elements) given the constraint that the V is physically meaningful(e.g., diagonal).
3. It turns out that this approach helps solve even linear inverse problemswith very large data sets. The factorization of a large data set into two muchsmaller sets works even in this case, and there are essentially no approximations.

Still a toy problem but now Nparticles….
1
Let
Then
1
where and 1
n n n nm m nm
m n
nm n nm n m
Nn
n n
nn
d E g d g g
gt
gS
Sg

We know that the functional T[V] is invertible numerically…… but in this case it is invertible analytically.
So we can gain some insight about WHAT we need to know about the T-matrix
inv
1
1
Nonlinear inverse solution (assuming we know ):
where
1
nn
n n nmNm
m n
m
T
PP t
g P P
It is sufficient to know column-wise (or row-wise) sums of the T-matrix to find V
Conjecture: it is sufficient to know ANY (or almost any) N linearly-independentcombinations of the elements of the T-matrix

Source
D1
D2
D3
D4

DCTMC motivation 1: Local minima
2
guess[ ]D F V D
[ ]F V
( )V rWave in
Wave out
DataTheoretical model
Object
V

DCTMC motivation 2: Large data sets
2
guess[ ]D F V D
Surface of detectors Surface of sources2
2
4
3
s
d
s d
v
N L
N L
N N N L
N L

Algebraic Structure of the Inverse Problem
1( )A I V VB
0, , -- different restrictions of the same unperturbed Green's function A B G
Every variable is a matrix!

1( )A I V VB
1
1
[ ] ( )
[ ] ( )
T V I V V
V T I TV T
ATB
Let us view T-matrix as the fundamental unknown and use the one-to-one Correspondence between T and V

The Experimental T-Matrix
1
1
d
s
NA A A
NB B B
A f g
B f g
ATB ,
1
1
A B
d
s
T
N
N
* 1
= , 1 ,
1
= , 1 ,
[ ] , [ ]
A B
d
s
A B
v
A B
f g N
N
T g f N
T R TR T T T
R R
21 , if >
=
Unknown , otherwise
A B
A BT
0 0UNKNOWN
UNKNOWN
UNKNOWN
UNKNOWN
UNKNOWN
0expT A B


Data-compatible T-matrix
Representation: SV
kT
Data-compatible T-matrix
Representation: RS
kT
Diagonal interaction-compati-
ble T-matrix
Representation: RS kT
Diagonal interaction-compati-
ble T-matrix
Representation: SV kT
Data-compatible
interaction matrix
(off-diagonal)
Representation: RS
kV
Diagonal interaction
matrix
(not data-compatible)
Representation: RS
kD
Shortcut 1: Fast Rotations
Shortcut 2: Fast T→D
expTData
First iteration
Subsequentiterations
SVD of A and BTh
e B
ott
len
eck
Exit if conditionis met

Computational Shortcut: Fast Rotations
1
1
1 1
5: [ ]
6: [ ]
1: [ ]
k k
k k
k k
T T
T T
T T
R
O
R
exp exp[ ] [ ] [ ]
[ ] [ ]
T T T T T T
T T T
O M N
M N
1 1
1 exp[ [ [ ]]] - [ [ [ ]]]k k k kT T T T T
R O R R N R
1 * *[ [ [ ]]] ( )A A B BT P P TP P R N R

Operation of “Diagonalization” and Linear Reconstructions
[ ]
( )ij ij ij ij
j
D V
D w r V
D
If ( ) , we can analyse the algorithm in the linear regime:ij ijw r
1 exp ( )k kv v I W v * *( ) ( )ij A A ij B B jiW P P P P
Vector containingthe diagonal part of V
1
expFixed point: v W v
2Tikhonov regularization: W W I
Practical tip: Richardson iteration is a very slow way to arrive at the linearized solution.Use direct solver of CG to compute linearized solution and then use this result as an initial guessFor the nonlinear iterations.

0
Diffraction tomography: Contrast:
exp ( ) 1( , ) ( )
4
ikG
r r rr r r
r r
16x16x9Nv=2,304Ns*Nd=234,256 30x30x15
Nv=13,500Ns*Nd=2,085,136
0
0
( ) *Shape( )
0 Shape( ) 1
0.00175,
0.0175
0.175
0.875
1.75
r r
r


No improvements: 900 iterations

With improvements: 70 iterations
• Start from linearized reconstruction (can be computed fast using our method)• Use weighted summation to the diagonal for “force-diagonalization”• Use reciprocity of source-detector pairs to improve symmetry of the
experimental T-matrix•Method starts to break down due to incorrect assignment of non-interacting
voxels (this can be avoid altogether – not a problem of convergence)

0
0
0
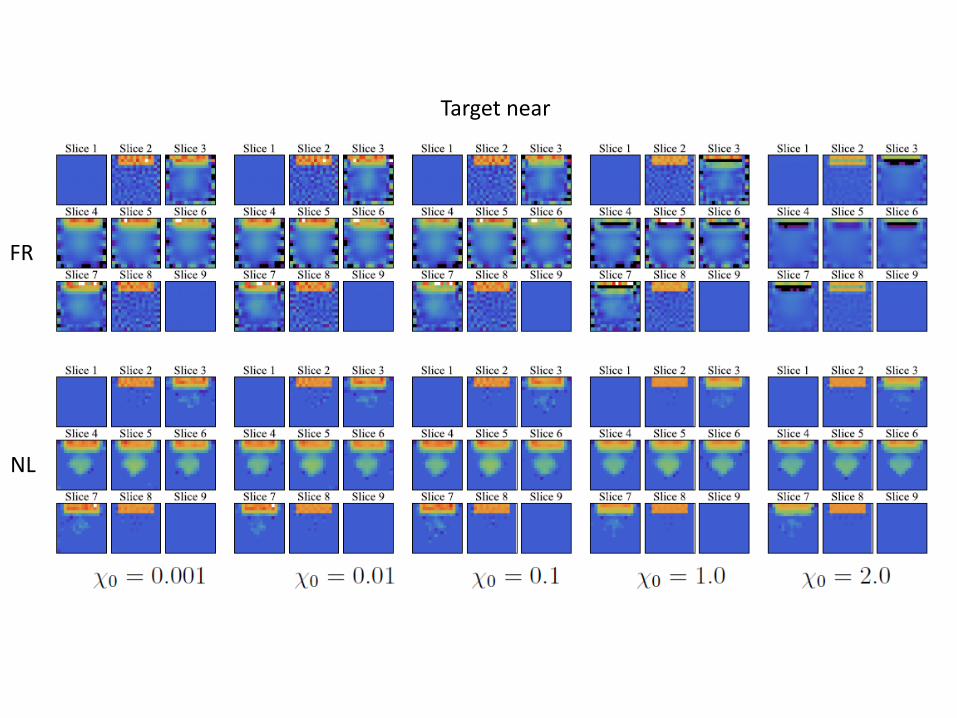
Diffusion tomography: Contrast: Optical depth: Noise:
exp ( )( , ) ( ) 2 2%
kG kL
r r rr r r
r r
Target far Target near

FR
NL
Target far
FR
NL
Target near

DCTMC works when Newton-Gauss fails (Convergence of Levenberg-Marquardt Iterations for the inverse diffraction problem, moderate contrast 0.0175)

CONCLUSIONS
• DCTMC works for nonlinear ISP with fairly strong nonlinearity
• DCTMC is, unfortunately, a complicated method: it requires many tweaks, attention to detail, and good programming to work
• As any other method, DCTMC breaks at some point. Not every nonlinear ISP can be solved!
H.W.Levinson and V.A.Markel, Solution of the nonlinear inverse scattering problem by T-matrix completion. I. Theory, Phys. Rev. E 94, 043317 (2016)
H.W.Levinson and V.A.Markel, Solution of the nonlinear inverse scattering problem by T-matrix completion. II. Simulations, Phys. Rev. E 94, 043318 (2016)