design and control of a 3-chambered fiber reinforced … · elongation, contraction, bending,...
TRANSCRIPT

REGULAR PAPER
Design and control of a 3-chambered fiber reinforced soft actuatorwith off-the-shelf stretch sensors
Pham Huy Nguyen1 • Saivimal Sridar1 • Wenlong Zhang1 • Panagiotis Polygerinos1
Received: 16 November 2016 / Accepted: 7 April 2017 / Published online: 18 April 2017
� Springer Singapore 2017
Abstract The necessity for efficient control of soft actu-
ators has recently resulted in the development of complex
physical models that are actuator geometry and material
type dependent. In this paper, we address the ability to do
closed-loop control with a simplified model independent of
material properties and material characteristics of a soft
robotic system. We demonstrate this by using a P-con-
troller on a new 3-chambered, fiber-reinforced elastomeric
actuator (3CA) that utilizes off-the-shelf stretch sensors. A
motion capture system is used to calibrate and generate two
different quasi-static models (a general linear regression
model and an input dependent model) that map the varying
chamber pressure readings with the actuator’s end effector
position, effectively represented by the stretch sensor cur-
vature. Simulations using a closed-loop controller, with
both models, provide further insight on the quality of the
models and corresponding control performance. We use
this information in an experimental study that yields
comparable performances to the simulated results. More-
over, we demonstrate that the input-dependent model based
controller can provide better results than that of the general
model based controller. Finally, we demonstrate that our
soft actuator can be closed-loop controlled with off-the-
shelf stretch sensors with repeatable results. This opens a
way to design new control concepts for multi-chambered
actuators that can produce more complex motions in the
future.
Keywords Soft actuator � Soft robot � Soft sensor � Linearregression model � Input dependent model � Control
1 Introduction
Compliance, high-power-to-weight ratio, and low fabrica-
tion costs are some of the many advantages associated with
the fast growing interest in soft robotics. These traits make
soft actuators and robots suitable for use in a number of
applications, including manipulation (Calisti et al. 2012;
Marchese and Rus 2015; Homberg et al. 2015; Brown et al.
2010), wearable and human-robot interfaces (Asbeck et al.
2015; Haines et al. 2014; Polygerinos et al. 2015; Galiana
et al. 2012; Park et al. 2014; Menguc et al. 2014; Subra-
manyam et al. 2015; Gafford et al. 2014; McMahan et al.
2005; Roche et al. 2015), and also search and rescue (Lin
et al. 2011; Marchese et al. 2014; Tolley et al. 2014; Morin
et al. 2012; Ramezani et al. 2017). These robots with their
soft actuation and soft-bodied nature allow safe interac-
tions with unstructured environments and the people
involved and show a great potential in replacing rigid
robotic manipulators utilized in industrial environments
(Fitzgerald 2013; Bischoff et al. 2010). Further exploration
of their capabilities could soon enough lead to robotic
systems that offer better and safer methods in handling
sensitive objects with the ability to work closely with
humans.
Fluidic actuators made with elastomeric materials is one
of the most common types of soft actuators encountered in
literature (Ilievski et al. 2011; Polygerinos et al. 2013;
Suzumori et al. 2007; Moseley et al. 2016; Firouzeh et al.
2015). They typically consist of a hollow chamber, or
network of chambers, which when pressurized with a fluid,
provide mechanically programmed-type motions, such as
Pham Huy Nguyen and Saivimal Sridar contributed equally to this
work.
& Panagiotis Polygerinos
1 The Polytechnic School, Ira A. Fulton Schools of
Engineering, Arizona State University, Mesa, AZ 85212,
USA
123
Int J Intell Robot Appl (2017) 1:342–351
DOI 10.1007/s41315-017-0020-z

elongation, contraction, bending, twisting, or combinations
of these different motions. These types of soft elastomeric
actuators either utilize a pneumatic or hydraulic pressur-
ization stimulus, while the ease of customization and
scaling is dependent on the physical properties of the
materials used to manufacture the actuator.
Some soft elastomeric actuators such as the PneuNets
(Polygerinos et al. 2013), fiber reinforced actuators (FRAs)
(Polygerinos et al. 2015; Cianchetti et al. 2013; Agarwal
et al. 2016; Galloway et al. 2013), and HydroMuscles
(Sridar et al. 2016) have been developed and utilized for a
variety of applications. While there has been a tremendous
increase in the fundamental understanding and the design
methods of specific types of soft actuators, not enough
progress has been made on the modelling and control
aspects of these actuators, mainly due to hindering factors
such as the non-linearity that is demonstrated by elas-
tomeric materials when pressurized. In recent studies, soft
actuators have been modeled as Ogden hyper-elastic solids
(Luo et al. 2015), hyper-elastic incompressible Yeoh and
Neo-Hookean materials (Polygerinos et al. 2015), standard
linear solid (SLS) (Sridar et al. 2016), etc., which are
mathematically intense, and are specific to the geometry
and material properties of the actuator design that is ana-
lyzed. Therefore, these models become design specific and
computationally expensive to solve in real-time.
Hence, there is a need for simpler, more computationally
efficient control methods for soft actuators. Towards this
direction, a small number of past works have demonstrated
simple control techniques that rely on previously modeled
soft actuator designs (Skorina et al. 2016; Kadowaki et al.
2011; Svetozarevic et al. 2016). This paper introduces a
new design of a soft actuator based on FRAs (Fig. 1) that
incorporates inexpensive, off-the-shelf soft-stretch sensors
to help sense elongation and contortion of the actuators
during pressurizations. The soft 3-chambered actuator
(3CA) design comes with a minimal number of passive
rigid components, where position control is achieved
through a control algorithm that is independent of the
material properties and geometrical characteristics.
Section 2 presents the design and manufacturing steps
of the 3CA. Section 3 illustrates the mechanical charac-
terization and integration with the actuator of the stretch
sensors. Modeling the behavior of the system is detailed in
Sect. 4. The controller development, and controller per-
formance, in simulation and experiments, of the 3CA are
detailed in Sects. 5 and 6.
Fig. 1 The 3-chambered actuator (3CA). It is embedded with
conductive rubber stretch sensors along the sides of each chamber.
The end effector position is marked by a visual marker
Fig. 2 a Mold for a single chamber; b mold for fusing the 3 chambers; c process of fabricating the 3-chambered actuator (3CA)
Design and control of a 3-chambered fiber reinforced soft actuator with off-the-shelf… 343
123

2 Design and manufacturing
The 3CA consists of three independent cylindrical FRAs in
a parallel formation that requires a three-step fabrication
process as seen in Fig. 2 to generate the final prototype of
the multi-articulate design.
2.1 Single chamber fabrication
The molds for the single FRA were fabricated in three
separate parts using a high spatial resolution rapid manu-
facturing 3D printer (Objet30, Stratasys, MN). The single
actuator mold is designed to incorporate helically extruded
features that are imprinted on the silicone to facilitate
thread winding on the actuator in both clockwise and
counterclockwise directions. These windings prevent the
radial expansion of the actuators and are identical in pitch
to ensure axial elongation of individual chambers as
opposed to bending. As shown in Fig. 2a, two of the mold
pieces contain the helical feature while the top part is used
as a guide for the core of the actuator. The parts of the mold
are secured together and silicone mixture is poured into the
mold cavity. The chambers were made using a two-part
silicone elastomer material with shore hardness 20A
(Dragonskin 20, Smooth-On Inc., Macungie, PA) mixed in
equal proportions by weight. A centrifugal mixer and a
vacuum chamber were utilized to produce a homogeneous
silicone mixture, free of trapped air bubbles that could
compromise the life span of the soft actuator.
The central hollow cavity within the single soft actuator
was generated with the use of a low friction surface acrylic
tube, which was inserted into the mold during the curing
process of the elastomer. A dowel pin attached in the center
of one of the core sides and the top core support piece
together achieve the desired concentricity within the mold.
The mold-core setup was placed in an oven at 70 �C to
expedite the silicone curing process. The mold was then
dismantled leaving the silicone and the core. Kevlar thread
of 3.556 9 10-4 m is then wrapped around the silicone to
act as the radial reinforcement. A symmetrical winding was
used in order to ensure constant strain over the length of
each of the chambers ensuring actuation only along the
center axis of actuator when pressurized. A total of three
soft actuators (chambers) were prepared having the exact
same dimensions, following the same molding process.
2.2 Fusion of the three chambers
A second mold was digitally printed to integrate the three
previously developed chambers and fuse them together.
The three-part mold was assembled and secured in place
and silicone elastomer was poured into the mold. The three
FR-actuators were then immersed into the mold as seen in
Fig. 2c and centered using the top core support piece. The
mold is heated in the oven until the silicone is cured. The
mold and cores were removed after the curing process is
completed and vented screws were inserted to one side of
the actuator, in each one of the chambers, where the dowel
pins have left a small orifice to the silicone. Seal tape was
applied to the external side of the actuator circumference
and dipped into a shallow container with uncured silicone
to seal the exposed sides of the chambers. The silicone
mixture was allowed to cure and the excess material that
did not adhere to the actuators’ surfaces due to the presence
of the tape, was cut off of the finished 3CA.
2.3 Sensor integration
An off-the-shelf stretch sensor (conductive rubber cord
stretch sensor, Adafruit, NY) was attached along each side
of the chambers of the 3CA, allowing sensing in 3
dimensions. The sensor was placed on the external surface
of the chambers along the axial direction as silicone
adhesive (Sil-Poxy, Smooth-On Inc., Macungie, PA) was
applied to seamlessly fuse it with the silicone body of the
3CA. The stretch sensors were placed 120� apart, in a
symmetric fashion to ensure that each strain combination
would lead to a unique end effector position of the actuator.
The ends of the sensors were left exposed for the electrical
connections that measure changes in resistivity when
stretched. The newly integrated sensors were allowed to
cure and adhere ensuring a strong and flexible bond.
3 Stretch sensor characterization
Each of the stretch sensors offers a resistivity of approxi-
mately 13.8 X mm (Adafruit, https://www.adafruit.com/
product/519), with the resistance able to increase when
transitioning from a relaxed to a stretched state. The
working range of the sensor is reported to be up to 50–70%
strain from its resting length. Higher strains deform the
sensor temporarily and require around 1–2 min of settling
time to return to its initial relaxed resistive value.
To characterize the stretch sensor, cord samples of 0.08 m
in length were placed on a universal tensile testing machine
(Instron 5944, Instron Corp., High Wycombe, United
Kingdom). A quasi-static tensile experiment was conducted
using the sensor samples with themachine. The sensors were
loaded and unloaded in the axial direction to a maximum
strain of 50% of their initial length. Three cord samples were
tested to ensure repeatability of the results. The straining
process of the sensors was repeated for 100 cycles at a speed
of 60 mm/min to test linearity and hysteresis of the sensor.
344 P. H. Nguyen et al.
123

A voltage divider was used across the sensors’ ends to
measure the change in voltage while their lengths were
varied. In Fig. 3, we show the characteristic behavior of
this stretch sensor and it is noted that all three cord samples
demonstrated similar characteristic behaviors. This off-the-
shelf stretch sensor demonstrates fairly linear response up
to a strain of 40%, however, some minimal hysteresis is
seen during the loading and unloading cycles.
The sensor samples were also subjected to tensile loading
until failure and observed that the material had plastically
deformed at a strain of 70% and fractured at a strain of 140%
approximately. From the sensor characterization experiments,
itwas concluded that the sensor had a fairly linear (R2 = 0.91)
strain range when tested within the desired strain limits of our
applicationwhichwas less than 30%strain. Therefore, a linear
fit was applied to the sensor for this working range.
To ascertain reliable operation of the sensor under the
linear regimen, pressurization tests that result in bending
motions of the 3CAwere performed such that both the desired
bending angles and the strain on the integrated sensors could
bemeasured. From the sensor measurements, it was observed
that the maximum 3CA bending strain is achieved at a pres-
sure of 0.172 MPa that is well under 30%, thus making this
sensor suitable for this application. Though the sensor shows
some hysteresis, prior work on hysteresis compensation has
been demonstrated in prior work (Chinimilli et al. 2016) has
been omitted in this paper for future work.
4 Modeling of the 3CA
To determine the relation between the strain in the actuator
and the end effector position, a linear regression model was
generated relating the strain in each of the stretch sensor
and the coordinates of the end effector. This model was
considered to be accurate with an R2 value of 0.83 hence
proving that the pressure, strain and the end effector
position were interrelated with a relatively accurate fit. It
was also ensured that unique end effector positions were
obtained for unique combination of pressure values of the
chambers of the 3CA.
x
y
z
24
35 ¼
k11 k12 k13k21 k22 k23k31 k32 k33
24
35 �
S1S2S3
24
35 ð1Þ
In Eq. (1), x, y and z are the end effector positions
corresponding to strains S1, S2, and S3 for the three
chambers. The coefficient matrix k is a 3 9 3 matrix
consisting constant coefficients.
To correlate the strain of each of the chambers of the
actuator with the respective pressure, the assumption of the
linear relation between pressure and strain was made via a
general model created using a linear regression method and
the input dependent model.
S1S2S3
24
35 ¼
A11 A12 A13
A21 A22 A23
A31 A32 A33
24
35 �
P1
P2
P3
24
35 ð2Þ
In Eq. (2), S is the strain vector of order 3 9 1, A, the
linear regression matrix of order 3 9 3 and P, a 3 9 1
vector of the pressure values. For the linear regression
model, each coefficient in matrix A is a scalar providing a
linear combination of pressure and strain and hence opti-
mized for 9 parameters.
In case of the input dependent model, A is a 3 9 3
matrix with each term expressed as a combination of the
three input pressures provided to each of the chambers of
the actuator, hence the name. It is as expressed in Eq. (3).
S1
S2
S3
264
375¼
a0þa1p1þa2p2þa3p3 � � � c0þc1p1þc2p2þc3p3
..
. . .. ..
.
g0þg1p1þg2p2þg3p3 � � � i0þ i1p1þ i2p2þ i3p3
2664
3775 �
P1
P2
P3
264
375
ð3Þ
where each of the terms of the coefficient matrix A is
expressed as a linear combination of the pressures and P1,
P2, and P3 are the pressures in chambers 1, 2, and 3
respectively. Therefore, a total of thirty-six constants were
obtained for the nine coefficients of the matrix A. Here, a
quadratic relation is applied as the strain is computed as a
function of pressure to as compared to the linear regression
model which utilizes a linear relation. Therefore, the strain
of each of the chambers of the 3CA can be estimated using
the model provided that the internal pressure of each of the
chambers is given in both the models. To improve the
accuracy of the input dependent model, the 36 parameters
were optimized using a least-squares cost function,
Fig. 3 Obtained data showing the off-the-shelf stretch sensor output
when subjected to cyclical strain
Design and control of a 3-chambered fiber reinforced soft actuator with off-the-shelf… 345
123

JðhÞ ¼X3i¼1
Si �X3j¼1
AijPj
" #2
ð4Þ
where J(h) is the cost function that is optimized to find the
36 parameters, h. Si, Aij, and Pj is the corresponding strain,
coefficient, and pressure of respective chamber.
To model the strain in the actuator with respect to the
corresponding chamber pressures, the actuator was pres-
surized at 5 different intervals (0, 0.0345, 0.0689, 0.1034,
0.1378 and 0.1724 MPa), alternating in sequence, between
the three chambers. Figure 4 depicts the pressurization pat-
tern for all the chambers of 3CA used to collect the end
effector position data required for modeling. This pattern
was used in order to cover the entire workspace around the
actuator. From this pattern, a combination of 216 unique
positions, based on the position of the actuator’s end effector
and also stretch sensor readings, were obtained using a
motion capture system (OptiTrack Trio V120, Natural Point
Inc., Corvallis, OR) and a data acquisition system.
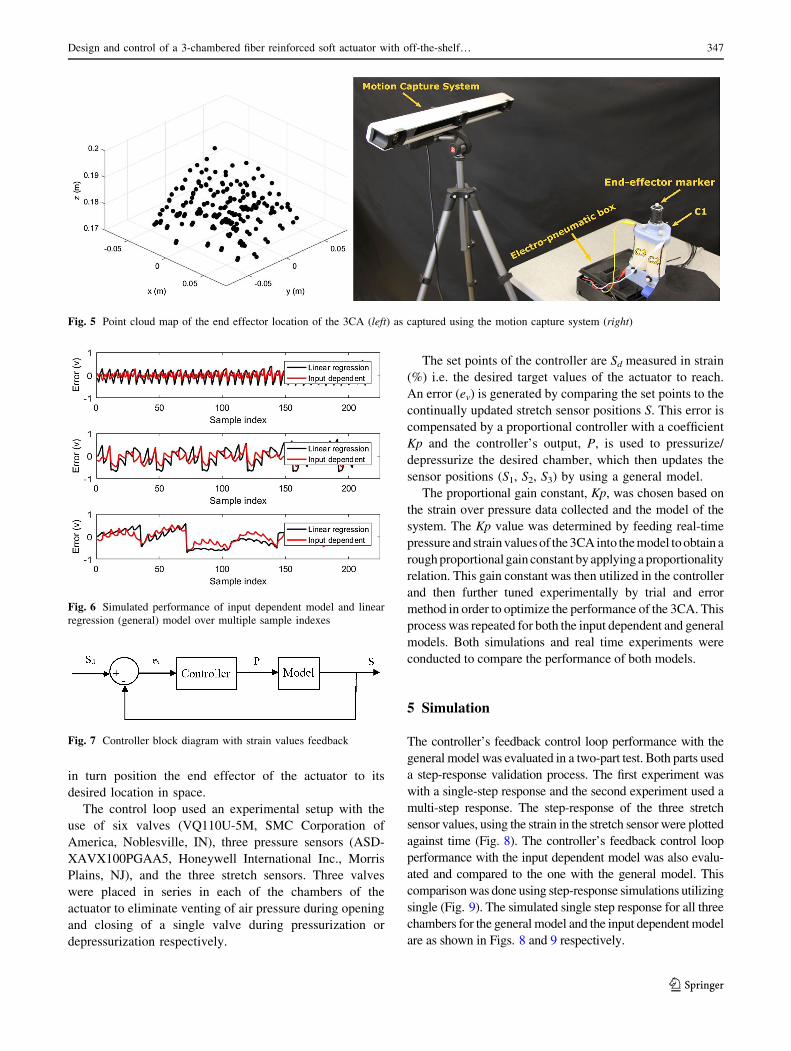
To obtain the points in space traceable by the actuator
using the motion capture system, reflective passive markers
were placed at various locations of the actuator. Three
markers at the base provide a ground reference plane, three
at the end cap of the actuator and one at the end effector
position. The cameras of the system were oriented in a way
that all marker points were visible during the calibration
phase. For calibration, the system would detect the markers
present at the base and set them as the ground plane of the
actuator. The motion of the other four markers would then
be compared with the ground plane to get the points swept
by the top marker.
The obtained 216 positions in space were plotted in 3D
space to form a point cloud. Figure 5 depicts the point
cloud obtained and the articulation capability of the 3CA.
Based on the point cloud coordinates a model was created
to find the correlation between pressure and strain values of
the stretch sensor. The desired pressure for each chamber
was provided as the input to the model and the strain
corresponding to the pressure was obtained as the output.
A new input dependent model was then generated uti-
lizing the data from the point cloud. The reasoning behind
the generation of the new input dependent model was to
reduce the dependence on approximation using the linear
regression based, general model. Tracking error of the new
input dependent model and the general model was com-
pared in simulation, the results are shown in Fig. 6. The
errors when utilizing the input dependent model were
estimated to be smaller than the general model by a root
mean square (RMS) value of 0.02 V.
4.1 3CA control
To control the position of the end effector of the actuator in
space, a low-level controller was designed to guide the
motion of the 3CA using the strain (S) values. In Sect. 4,
the reachable points and the range of motion of the actuator
were modelled with respect to the pressure (P) and stretch
sensor values (S). In our experiments, we designed and
tested two models with the controller as discussed in
Sect. 4. The controller was designed to minimize the error
signal, which is the difference between the reference strain
value we set and the feedback strain value of the stretch
sensors generated from the model (M). Strain (S) was
chosen the control variable keeping in mind, the interaction
of the 3 chambers of the actuator during pressurization. We
have observed that having only pressure control would not
be entirely reliable because the interaction of the three
chambers while inflating can cause one chamber to squeeze
the other thus possibly altering the internal pressure of the
adjacent chambers. The system’s feedback control loop
(Fig. 7), shows the ability of the controller to use pressure
information to control the values of the stretch sensors and
Fig. 4 Pressurization sequence of: a chamber 1; b chamber 2; c chamber 3 of the 3CA. All individual chamber pressurizations occur under the
same time domain following an incremental pressure pattern
346 P. H. Nguyen et al.
123
in turn position the end effector of the actuator to its
desired location in space.
The control loop used an experimental setup with the
use of six valves (VQ110U-5M, SMC Corporation of
America, Noblesville, IN), three pressure sensors (ASD-
XAVX100PGAA5, Honeywell International Inc., Morris
Plains, NJ), and the three stretch sensors. Three valves
were placed in series in each of the chambers of the
actuator to eliminate venting of air pressure during opening
and closing of a single valve during pressurization or
depressurization respectively.
The set points of the controller are Sd measured in strain
(%) i.e. the desired target values of the actuator to reach.
An error (ev) is generated by comparing the set points to the
continually updated stretch sensor positions S. This error is
compensated by a proportional controller with a coefficient
Kp and the controller’s output, P, is used to pressurize/
depressurize the desired chamber, which then updates the
sensor positions (S1, S2, S3) by using a general model.
The proportional gain constant, Kp, was chosen based on
the strain over pressure data collected and the model of the
system. The Kp value was determined by feeding real-time
pressure and strainvaluesof the 3CA into themodel toobtain a
roughproportional gain constant byapplyinga proportionality
relation. This gain constant was then utilized in the controller
and then further tuned experimentally by trial and error
method in order to optimize the performance of the 3CA. This
process was repeated for both the input dependent and general
models. Both simulations and real time experiments were
conducted to compare the performance of both models.
5 Simulation
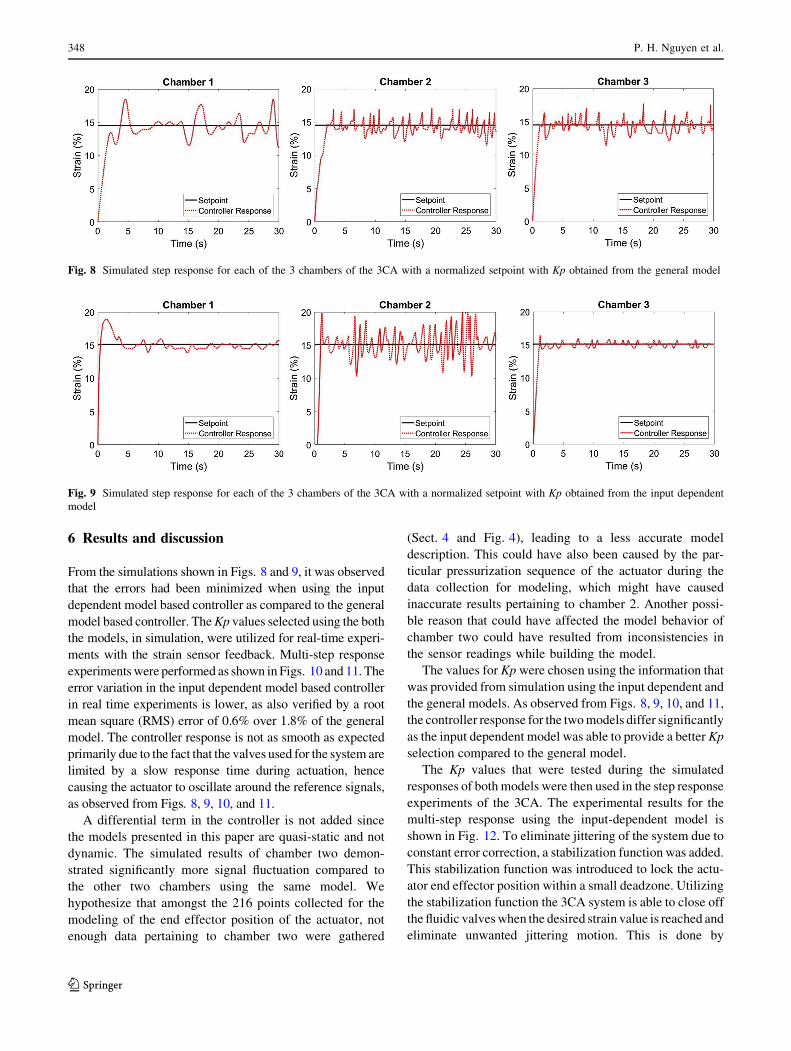
The controller’s feedback control loop performance with the
general model was evaluated in a two-part test. Both parts used
a step-response validation process. The first experiment was
with a single-step response and the second experiment used a
multi-step response. The step-response of the three stretch
sensor values, using the strain in the stretch sensor were plotted
against time (Fig. 8). The controller’s feedback control loop
performance with the input dependent model was also evalu-
ated and compared to the one with the general model. This
comparisonwas done using step-response simulations utilizing
single (Fig. 9). The simulated single step response for all three
chambers for the general model and the input dependentmodel
are as shown in Figs. 8 and 9 respectively.
Fig. 5 Point cloud map of the end effector location of the 3CA (left) as captured using the motion capture system (right)
Fig. 6 Simulated performance of input dependent model and linear
regression (general) model over multiple sample indexes
Fig. 7 Controller block diagram with strain values feedback
Design and control of a 3-chambered fiber reinforced soft actuator with off-the-shelf… 347
123
6 Results and discussion
From the simulations shown in Figs. 8 and 9, it was observed
that the errors had been minimized when using the input
dependent model based controller as compared to the general
model based controller. TheKp values selected using the both
the models, in simulation, were utilized for real-time experi-
ments with the strain sensor feedback. Multi-step response
experimentswere performed as shown in Figs. 10 and 11. The
error variation in the input dependent model based controller
in real time experiments is lower, as also verified by a root
mean square (RMS) error of 0.6% over 1.8% of the general
model. The controller response is not as smooth as expected
primarily due to the fact that the valves used for the system are
limited by a slow response time during actuation, hence
causing the actuator to oscillate around the reference signals,
as observed from Figs. 8, 9, 10, and 11.
A differential term in the controller is not added since
the models presented in this paper are quasi-static and not
dynamic. The simulated results of chamber two demon-
strated significantly more signal fluctuation compared to
the other two chambers using the same model. We
hypothesize that amongst the 216 points collected for the
modeling of the end effector position of the actuator, not
enough data pertaining to chamber two were gathered
(Sect. 4 and Fig. 4), leading to a less accurate model
description. This could have also been caused by the par-
ticular pressurization sequence of the actuator during the
data collection for modeling, which might have caused
inaccurate results pertaining to chamber 2. Another possi-
ble reason that could have affected the model behavior of
chamber two could have resulted from inconsistencies in
the sensor readings while building the model.
The values for Kp were chosen using the information that
was provided from simulation using the input dependent and
the general models. As observed from Figs. 8, 9, 10, and 11,
the controller response for the twomodels differ significantly
as the input dependent model was able to provide a better Kp
selection compared to the general model.
The Kp values that were tested during the simulated
responses of both models were then used in the step response
experiments of the 3CA. The experimental results for the
multi-step response using the input-dependent model is
shown in Fig. 12. To eliminate jittering of the system due to
constant error correction, a stabilization function was added.
This stabilization function was introduced to lock the actu-
ator end effector position within a small deadzone. Utilizing
the stabilization function the 3CA system is able to close off
the fluidic valveswhen the desired strain value is reached and
eliminate unwanted jittering motion. This is done by
Fig. 8 Simulated step response for each of the 3 chambers of the 3CA with a normalized setpoint with Kp obtained from the general model
Fig. 9 Simulated step response for each of the 3 chambers of the 3CA with a normalized setpoint with Kp obtained from the input dependent
model
348 P. H. Nguyen et al.
123

continually comparing the amplitude of the desired reference
valuewith the current strain reading.When the strain reading
is detected to bewithin the deadzone around the reference for
over a short period of time, the pressure values are held at that
set point until there is a new desired set point.
7 Conclusions and future work
A new design of a 3CA pneumatic actuator with integrated
stretch sensors was developed via a multi-step fabrication
process capable of generating complex 3-D movements,
utilizing simple control inputs, at a low-cost, independent
of material properties and geometrical parameters. The end
effector positions of the actuator were pre-mapped using a
motion capture system while recording the associated
strain values at every instant. The range of motion of the
system was visualized and the relationship between the
pressure, stretch sensor, and the position of the end effector
of the actuator were evaluated and modelled. An analytical
approach to predict the actuator performance with explicit
relationships between the set strain values, the pressure
output from the controller, and the model generated strain
values was used. The model estimated the stretch sensor
values, which represented the position end effector of the
actuator in space, based only on the supplied air pressure.
A feedback control loop with two different models, a
general and an input-dependent model, were implemented
to demonstrate the ease of actuator controllability. The
effectiveness of the position controller was demonstrated
using single and multiple step functions. The valve con-
troller of the feedback control loop successfully tracked
the reference signals for both models presented in this
work. The general model tracked a single-step signal with
a small time delay, but had a lot of valve switching in
comparison to the controller that used the input-dependent
model, which was more stable and showed higher
accuracy.
Jerky motion leading to unstable states of the end
effector position of the 3CA was also observed. This was
because of the constant error correction of the controller
having a delay due to inherent nature of the selected valves
having a low operational bandwidth. The undesired motion
can be reduced employing higher quality valves that offer
faster switching modes. Moving forward, the dynamic
behavior of the 3CA will be explored leading to more
effective models and efficient system behavior.
Fig. 11 Experimental feedback control loop performance for multi-
step response using a Kp value indicated by the input dependent
model
Fig. 12 Experimental feedback control loop performance for multi-
step response using a Kp value indicated by the input dependent
model with a stabilization function
Fig. 10 Experimental feedback control loop performance for multi-
step response using a Kp value indicated by the general model
Design and control of a 3-chambered fiber reinforced soft actuator with off-the-shelf… 349
123

Although inexpensive, durable, and readily available,
the stretch sensor did not necessarily provide always
repeatable values when in operation and present non-linear
behavior post 50% strain. To further use these sensors, a
hysteresis compensator would have to be implemented in
order to improve the strain readings of the sensors, each of
the chambers. Therefore, new methods and filtering algo-
rithms will be explored for more accurately sensing the
strain in the chambers.
Lastly, the stretch sensor positions and corresponding
error could be utilized to relate the elongation of each of
the chambers with the bending angle of the actuator. With
the bending angles known, a model that translates a desired
azimuth and elevation (Firouzeh et al. 2015) to the stretch
sensor strain can be generated. In the future, multiple 3CAs
will be stacked together, each actuator acting as a single
joint, to create a highly articulate soft-robotic arm that will
be able to safely interact with humans and the environment.
References
Adafruit: Conductive rubber cord stretch sensor [Online]. Available:
https://www.adafruit.com/product/519
Agarwal, G., Besuchet, N., Audergon, B., Paik, J.: Stretchable
materials for robust soft actuators towards assistive wearable
devices. Sci. Rep. 6, 34224 (2016)
Asbeck, A.T., Schmidt, K., Galiana, I., Wagner, D., Walsh, C.J.:
Multi-joint soft exosuit for gait assistance. In: IEEE Interna-
tional Conference on Robotics and Automation,
pp. 6197–6204 (2015)
Bischoff, R., Kurth, J., Schreiber, G., Koeppe, R., Albu-Schaffer, A.,
Beyer, A., Eiberger, O., Haddadin, S., Stemmer, G., Grunwald,
A., et al.: The KUKA-DLR Lightweight Robot arm—a new
reference platform for robotics research and manufacturing. In:
Robotics (ISR), 2010 41st International Symposium on and 2010
6th German Conference on Robotics, pp. 1–8 (2010)
Brown, E., Rodenberg, N., Amend, J., Mozeika, A., Steltz, E., Zakin,
M.R., Lipson, H., Jaeger, H.M.: rom the Cover: Universal
robotic gripper based on the jamming of granular material. Proc.
Natl. Acad. Sci. USA 107(44), 18809–18814 (2010)
Calisti, M., Arienti, A., Renda, F., Levy, G., Hochner, B., Mazzolai, B.,
Dario, P., Laschi, C.: Design and development of a soft robot with
crawling and grasping capabilities. In: Proceedings of the IEEE
International Conference on Robotics and Automation,
pp. 4950–4955 (2012)
Chinimilli, P., Wachtel, S., Polygerinos, P., Zhang, W.: Hysteresis
compensation for ground contact force measurement with shoe-
embedded air pressure sensors. In: ASME Dynamic Systems and
Control Conference (DSSC), p. 9920 (2016)
Cianchetti, M., Ranzani, T., Gerboni, G., De Falco, I., Laschi, C.,
Member, S., Menciassi, A.: STIFF-FLOP Surgical Manipulator:
mechanical design and experimental characterization of the
single module. In: International Conference on Intelligent
Robots and Systems (IROS), pp. 3576–3581 (2013)
Firouzeh, A., Salerno, M., Paik, J.: Soft pneumatic actuator with
adjustable stiffness layers for Multi-DoF Actuation. In: 2015
IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS), pp. 1117–1124 (2015)
Fitzgerald, C.: Developing baxter. In: IEEE Conference on Tech-
nologies for Practical Robot Applications (TePRA) (2013)
Gafford, J., Ding, Y., Harris, A., McKenna, T., Polygerinos, P.,
Holland, D., Moser, A., Walsh, C.J.: Shape deposition manu-
facturing of a soft, atraumatic, deployable surgical grasper. In:
ASME Design of Medical Devices Conference (2014)
Galiana, I., Member, S., Iii, F.L.H., Howe, R.D., Popovic, M.B.,
Hammond, F.L., Howe, R.D., Popovic, M.B.: Wearable soft
robotic device for post-stroke shoulder rehabilitation: identifying
misalignments. In: 2012 IEEE/RSJ International Conference on
Intelligent Robots and Systems, October, pp. 317–322 (2012)
Galloway, K.C., Polygerinos, P., Walsh, C.J., Wood, R.J.: Mechan-
ically programmable bend radius for fiber-reinforced soft
actuators. In: 2013 16th International Conference on Advanced
Robotics, ICAR (2013)
Haines, C.S., Lima, M.D., Li, N., Spinks, G.M., Foroughi, J., Madden,
J.D., Kim, S.H.J., Fang, S., Jung de Andrade, M., Goktepe, F.,
Goktepe, O., Mirvakili, S.M., Naficy, S., Lepro, X., Oh, J.,
Kozlov, M.E., Kim, S.H.J., Xu, X., Swedlove, B.J., Wallace,
G.G., Baughman, R.H.: Artificial muscles from fishing line and
sewing thread. Science 343(6173), 868–872 (2014)
Homberg, B.S., Katzschmann, R.K., Dogar, M.R., Rus, D.: Haptic
Identification of Objects using a Modular Soft Robotic Gripper.
In: 2015 IEEE/RSJ International Conference on Intelligent
Robots and Systems, September, pp. 1698–1705 (2015)
Ilievski, F., Mazzeo, A.D., Shepherd, R.F., Chen, X., Whitesides, G.M.:
Soft robotics for chemists. Angew. Chem. Int. Ed. 50(8), 1890–1895(2011)
Kadowaki, Y., Noritsugu, T., Takaiwa, M., Sasaki, D., Kato, M.:
Development of soft power-assist glove and control based on
human intent. J. Robot. Mechatron. 23(2), 281–291 (2011)
Lin, H.-T., Leisk, G.G., Trimmer, B.: GoQBot: a caterpillar-inspired
soft-bodied rolling robot. Bioinspir. Biomim. 6(2), 26007 (2011)
Luo, M., Skorina, E.H., Tao, W., Chen, F., Onal, C.D.: Optimized
design of a rigid kinematic module for antagonistic soft
actuation. In: IEEE Conference on Technologies for Practical
Robot Applications, TePRA, August (2015)
Marchese, A.D., Rus, D.: Design, kinematics, and control of a soft
spatial fluidic elastomer manipulator. Int. J. Rob. Res. 35,840–869 (2015)
Marchese, A.D., Onal, C.D., Rus, D.: Autonomous soft robotic fish
capable of escape maneuvers using fluidic elastomer actuators.
Soft Robot. 1(1), 75–87 (2014)
McMahan, W., Jones, B.A., Walker, I.D.: Design and implementation
of a multi-section continuum robot: air-octor. In: 2005 IEEE/RSJ
International Conference on Intelligent Robots and Systems
IROS, January, pp. 3345–3352 (2005)
Menguc, Y., Park, Y.-L., Pei, H., Vogt, D., Aubin, P.M., Winchell, E.,
Fluke, L., Stirling, L., Wood, R.J., Walsh, C.J.: Wearable soft
sensing suit for human gait measurement. Int. J. Rob. Res.
33(14), 1748–1764 (2014)
Morin, S.A., Shepherd, R.F., Kwok, S.W., Stokes, A.A., Nemiroski,
A., Whitesides, G.M.: Camouflage and display for soft machines.
Science 337(6096), 828–832 (2012)
Moseley, P., Florez, J.M., Sonar, H.A., Agarwal, G., Curtin, W., Paik,
J.: Modeling, design, and development of soft pneumaticactuators with finite element method. Adv. Eng. Mater. 18(6),978–988 (2016)
Park, Y.-L., Chen, B., Perez-Arancibia, N.O., Young, D., Stirling, L.,
Wood, R.J., Goldfield, E.C., Nagpal, R.: Design and control of a
bio-inspired soft wearable robotic device for ankle-foot rehabil-
itation. Bioinspir. Biomim. 9(1), 16007 (2014)
Polygerinos, P., Galloway, K.C., Sanan, S., Herman, M., Walsh, C.J.:
EMG controlled soft robotic glove for assistance during
activities of daily living. In: 2015 IEEE International Conference
on Rehabilitative Robotics, August, pp. 55–60 (2015)
350 P. H. Nguyen et al.
123

Polygerinos, P., Wang, Z., Galloway, K., Overvelde, B., Wood, R.:
Soft elastomeric actuators with fiber reinforcement. In: Materials
and Research Society, p. 2 (2013)
Polygerinos, P., Wang, Z., Overvelde, J.T.B., Galloway, K.C., Wood,
R.J., Bertoldi, K., Walsh, C.J.: Modeling of soft fiber-reinforced
bending actuators. IEEE Trans. Robot. 31(3), 778–789 (2015)
Ramezani, A., Chung, S.-J., Hutchinson, S.: A biomimetic robotic
platform to study flight specializations of bats. Sci. Robot. 2(3),eaal2505 (2017)
Roche, E.T., Fabozzo, A., Lee, Y., Polygerinos, P., Friehs, I.,
Schuster, L., Whyte, W., Casar Berazaluce, A.M., Bueno, A.,
Lang, N., Pereira, M.J.N., Feins, E., Wasserman, S., O’Cearb-
haill, E.D., Vasilyev, N.V., Mooney, D.J., Karp, J.M., del Nido,
P.J., Walsh, C.J.: A light-reflecting balloon catheter for atrau-
matic tissue defect repair. Sci. Transl. Med. 7(306), 306–349(2015)
Skorina, E.H., Tao,W., Chen, F., Luo,M., Onal, C.D.:Motion control of a
soft-actuated modular manipulator. In: 2016 IEEE International
Conference on Robotics and Automation, May, pp. 4997–5002
(2016)
Sridar, S., Majeika, C.J., Schaffer, P., Bowers, M., Ueda, S., Barth,
A.J., Sorrells, J.L., Wu, J.T., Hunt, T.R., Popovic, M.: Hydro
muscle—a novel soft fluidic actuator. In: 2016 IEEE Interna-
tional Conference on Robotics and Automation, pp. 4014–4021
(2016)
Subramanyam, K., Rogers, E., Kulesza, M., Holland, D., Gafford, J.,
Goldfield, E., Walsh, C.: Soft wearable orthotic device for
assisting kicking motion in developmentally delayed infants.
J. Med. Device 9(3), 30913 (2015)
Suzumori, K., Endo, S., Kanda, T., Kato, N., Suzuki, H.: A bending
pneumatic rubber actuator realizing soft-bodied manta swim-
ming robot. In: Proceedings of the IEEE International
Conference on Robotics and Automation, April,
pp. 4975–4980 (2007)
Svetozarevic, B., Hofer, J., Jacob, D., Begle, M., Chatzi, E., Nagy, Z.,
Hofer, J., Jacob, D., Begle, M., Chatzi, E., Schlueter, A.: SoRo-
Track: a two-axis soft robotic platform for solar tracking and
building-integrated photovoltaic applications. In: 2016 IEEE
International Conference on Robotics and Automation, May,
pp. 4945–4950 (2016)
Tolley, M.T., Shepherd, R.F., Karpelson, M., Bartlett, N.W., Galloway,
K.C., Wehner, M., Nunes, R., Whitesides, G.M., Wood, R.J.: An
untethered jumping soft robot. In: IEEE International Conference
on Intelligent Robots and Systems, pp. 561–566 (2014)
Pham Huy Nguyen received
the B.S.E in Mechatronics (First
Class Honors) from the Asian
Institute of Technology in
Bangkok, Thailand in 2013 and
the M.Sc. degree in robotics
from the EMARO (European
Masters in Advanced Robotics)
Program in 2015. He is cur-
rently a Graduate Research
Assistant with the Ira A. Fulton
Schools of Engineering at Ari-
zona State University, USA,
with the Bio-Inspired Mecha-
tronics Lab. His research inter-
est includes the fields of bio-inspired, soft, and wearable robotics.
Saivimal Sridar received his
B.Tech in mechanical engi-
neering from SASTRA Univer-
sity, Thanjavur, India in 2014
and a M.S. in Robotics Engi-
neering from Worcester
Polytechnic Institute in 2016.
He is currently a Graduate
Research Assistant at the
Polytechnic School, the Ira.
A. Fulton Schools of Engineer-
ing, Arizona State University,
USA pursuing a Ph.D. at the
Bio-inspired Mechatronics lab.
His research interests include
soft robotics, wearable robotics, and bio-mechatronic systems.
Wenlong Zhang is currently an
Assistant Professor in the
Polytechnic School at the Ira
A. Fulton Schools of Engi-
neering, Arizona State
University. He received his
B.Eng. degree in control sci-
ence and engineering from
Harbin Institute of Technol-
ogy, and M.S. in mechanical
engineering, M.A. in statistics,
and Ph.D. in mechanical engi-
neering all from University of
California, Berkeley. His
research interests lie in the
design, modeling, and control of cyber-physical systems, with
applications to healthcare, robotics, and manufacturing. He
received several honors and awards, including Berkeley Fellow-
ship for Graduate Study from UC Berkeley, Best Paper Award in
the 2013 IEEE Real-time System Symposium, and Semi-Plenary
Paper Award Finalist in the 2012 ASME Dynamic Systems and
Control Conference.
Panagiotis Polygerinos re-
ceived the B.Eng. degree (top of
his class) in mechanical engi-
neering from the Technological
Educational Institute of Crete,
Heraklion, Greece in 2006, the
M.Sc. (with distinction) degree in
Mechatronics and Ph.D. in
mechanical engineering/medical
robotics from King’s College
London, London, U.K., in 2007
and 2011, respectively. From
2012 until 2015, he was a post-
doctoral fellow of technology
development with the Harvard
Biodesign Lab and the Wyss Institute for Biologically Inspired Engi-
neering at Harvard University. He is currently an Assistant Professor
with the Ira A. Fulton Schools of Engineering at Arizona State
University, USA, and director of the Bio-Inspired Mechatronics Lab. His
research interests focus on the realization of tasks that are essential to the
design, implementation and integration of novel soft robotic systems and
mechatronic devices.
Design and control of a 3-chambered fiber reinforced soft actuator with off-the-shelf… 351
123