desvios e tolerÂncias geomÉtricas
TRANSCRIPT

3. Desvios e Tolerâncias Geométricas
- 45 -
3. DESVIOS E TOLERÂNCIAS GEOMÉTRICAS
3.1 Introdução
Em muitas aplicações as tolerâncias dimensionais são insuficientes para se determinar
exatamente como deve estar a peça depois de pronta para evitar trabalhos
posteriores. Uma comparação entre a peça real fabricada e a peça ideal especificada
pelo projeto e mostrada no desenho mostra que existem diferenças. Ou seja, durante
a fabricação de peças pelas máquinas-ferramenta, surgem desvios (ou erros)
provocando alterações na peça real.
Causas dos desvios geométricos:
• Tensões residuais internas;
• Falta de rigidez do equipamento e/ou de um dispositivo de usinagem;
• Perda de gume cortante de uma ferramenta;
• Forças excessivas provocadas pelo processo de fabricação (Ex.: Entre pontas de um
torno).
• Velocidade de corte não adequada para remoção de material;
• Variação de dureza da peça ao longo do plano de usinagem e
• Suportes não adequados para ferramentas.
Tais desvios devem ser limitados e enquadrados em tolerâncias, de tal forma a não
prejudicar o funcionamento do conjunto.
Portanto, o projeto de uma peça deve prever, além das tolerâncias dimensionais, as
chamadas tolerâncias geométricas, a fim de se obter a melhor qualidade funcional
possível.
Desvio Geométricos ⇒ São desvios de forma e posição: É um erro do processo de
fabricação;
Tolerâncias Geométricas ⇒ São as variações permissíveis do erro, ou seja, são os
limites dentro do qual os desvio (ou erro) de forma e posição devem estar
compreendidos.

3. Desvios e Tolerâncias Geométricas
- 46 -
Classificação dos desvios geométricos: Desvios macrogeométricos e desvios
microgeométricos (Rugosidades de superfícies).
Os desvios macrogeométricos são definidos pela norma ABNT NBR 6409. A norma
DIN 7184 e ISO R-1101 também apresentam os conceitos relativos a desvios e
tolerâncias geométricas.
3.2 Necessidades e Consequências das Tolerâncias Geométricas
Na maioria dos casos as peças são compostas de corpos geométricos ligados entre si
por superfícies de formato simples, tais como planos, superfícies planas, cilíndricas ou
cônicas.
Desvios de Forma: É o grau de variação das superfícies reais com relação aos sólidos
geométricos que os definem.
Microgeométricos: Rugosidade superficial;
Macrogeométricos: Retilineidade, circularidade, cilindricidade,
planicidade.
Desvios de Posição: É o grau de variação dentre as diversas superfícies reais entre
si, com relação ao seu posicionamento teórico.
Orientação para dois elementos associados: Desvios angulares,
paralelismos e perpendicularidade.
Posição para dois elementos associados: Desvios de localização,
simetria, concentricidade e coaxilidade.
São definidos para elementos associados.
Desvios Compostos: São os devios compostos de forma e posição.
Desvios de batida radial e axial;
Desvios de verdadeira posição.
Condições onde será necessário indicar as tolerâncias de forma e posição:
• Em peças para as quais a exatidão de forma requerida não seja garantida com os
meios normais de fabricação;

3. Desvios e Tolerâncias Geométricas
- 47 -
• Em peças onde deve haver coincidência bastante aproximada entre as superfícies. As
tolerâncias de forma devem ser menores ou iguais às tolerâncias dimensionais;
• Em peças onde além do controle dimensional, seja tambem necessário o controle de
forma para garantir a montagem sem interferências. Exemplo: Montagem seriada de
caixas de engrenagens onde o erro de excentricidade e paralelismo podem influir no
desempenho do conjunto.
As tolerâncias geométricas não devem ser indicadas a menos que sejam
indispensáveis para assegurar a funcionabilidade do conjunto.

3. Desvios e Tolerâncias Geométricas
- 48 -
3.2.1 Simbologia
A tabela 3.1 mostra os erros geométricos e respectivos símbolos a serem usados no
desenho das peças.
Tab. 3.1: Símbologia de desvios geométricos
Características Símbolo
Retilineidade
Planicidade (planeza)
Circularidade
Cilindricidade
Forma de uma linha qualquer
FORMA PARA
ELEMENTOS ISOLADOS
Forma de uma Superfície qualquer
Paralelismo
Perpendicularidade
ORIENTAÇÃO PARA
ELEMENTOS
ASSOCIADOS Inclinação
Localização de um elemento ⊕
Concentricidade e Coaxilidade
POSIÇÃO PARA
ELEMENTOS
ASSOCIADOS Simetria
Superfície indicada
BATIMENTO Total
Condição de máximo Material

3. Desvios e Tolerâncias Geométricas
-49-
3.3 Tolerâncias e Desvios (ou Diferenças) de Forma
Desvios de forma: É a diferença entre a superfície real da peça e a forma geométrica
teórica.
São definidos para superfícies isoladas.
Tolerância de forma: É distância entre duas superfícies paralelas (ou entre duas linhas
paralelas) entre as quais deve-se encontrar o perfil ou superfície
real da peça. Ou seja, é o desvio de forma admissível.
A forma de um elemento isolado será considerada correta quando a distância de
cada um de seus pontos a uma superfície de forma geométrica ideal, em contato
com ele, for igual ou inferior ao valor da tolerância dada.
Tolerâncias da Reta: Retilineidade
A retilineidade pode também ser denominada de desigualdade.
Desvios de reta em sólidos de revolução (cilindros, eixos): O espaço de tolerância para
a diferença admissível da reta (ou desigualdade admissível) é um cilindro de diâmetro
TG. Através da intersecção do cilindro de tolerância com dois planos perpendiculares
deve ficar o perfil da reta. Assim, o perfil da reta real deve ficar entre duas retas
paralelas com distância TG. (Fig. 3.1)
TG
TG
Planos deMedidas
Fig. 3.1: Tolerância de retilineidade para sólidos de revolução

3. Desvios e Tolerâncias Geométricas
-50-
Desvios de reta em sólidos de formato retangular: O campo de tolerâncias para a
diferença admissível da reta é definida por um paralelepípedo, cujo corte transversal
define as cotas T1G e T2G, de acordo com dois planos perpendiculares entre si. A reta
real deverá estar dentro deste paralelepípedo. (Fig. 3.2)
Planos deMedidas
T1GT2G
Fig. 3.2: Tolerância de retilineidade para sólidos de formato retangular
Se não for especificada nenhuma tolerância de retilineidade, a peça da Fig. 3.3 poderá
ter qualquer forma, desde que esteja dentro dos limites dos diâmetros máximo e
mínimo.
40,0039,75 39,75 40,00
39,75
39,75 40,00
40,00
Fig. 3.3: Variações de retilineidade

3. Desvios e Tolerâncias Geométricas
-51-
As vezes, a especificação de tolerância de retilineidade reduzirá o tamanho da zona de
tolerâncias dimensionais, como mostra a fig. 3.4.
Reto dentro de 0,05 total Reto dentro de 0,05 total
φ40,00 φ39,75
Zona de Tolerância0,05
INTERPRETAÇÃO
Fig. 3.4: Especificações de retilineidade
Aplicação: As tolerâncias de retilineidade devem ser previstas em alinhamentos de
canais de chavetas, de pinos de guia e em eixos finos e compridos
Tolerâncias de Planicidade (ou planeza)
É o espaço limitado por dois planos paralelos entre si. A superfície real deve estar
situada dentro da distância TB. (Fig. 3.5).
t
Planos de Medida
Superfície Real
Fig. 3.5: Tolerância de planicidade

3. Desvios e Tolerâncias Geométricas
-52-
Os desvios de planicidade mais comuns são a concavidade e a convexidade (Fig. 3.6)
(a) (b)
Fig. 3.6: Desvios de planicidade: (a) concavidade; (b) convexidade
Fig. 3.6B: Simbologia de Desvios de planicidade
Tolerâncias usuais de planicidade: • Torneamento: 0,01 a 0,03 mm; • Fresamento: 0,02 a 0,05 mm; • Retífica: 0,005 a 0,01 mm. Aplicação: Assento de carros sobre guias prismáticas ou paralelas em máquinas
ferramentas.
Tolerâncias de Circularidade (ou Ovalizações)
É a diferença entre os diâmetros de dois círculos concêntricos. O perfil real deve situar-
se entre os dois círculos. (Fig. 3.7)

3. Desvios e Tolerâncias Geométricas
-53-
Aplicação: Cilindros de motores de combustão interna - As tolerâncias dimensionais são
abertas (H11); A tolerância de circularidade deve ser estreita para evitar
vazamentos.
Tolerâncias usuais de circularidade:
• Torneamento: até 0,01 mm;
• Mandrilamento: 0,01 a 0,015 mm;
• Retífica: 0,005 a 0,015 mm.
Dd
Tk
Fig. 3.7: Tolerância de circularidade
Fig. 3.7B: Simbologia de Tolerância de circularidade
Tolerâncias de Cilindricidade
É a diferença entre os diâmetros de dois cilindros concêntricos. O perfil real deve situar-se entre os dois cilindros (Fig. 3.8). O desvio de circularidade é um caso particular do desvio de cilindricidade.

3. Desvios e Tolerâncias Geométricas
-54-
Fig. 3.8: Tolerância de cilindricidade
Fig. 3.8B: Simbologia de Tolerância de cilindricidade
Os desvios de cilindricidade posem ser medidos na seção: • Longitudinal do cilindro: Conicidade, concavidade e convexidade; • Transversal do cilindro: Ovalização (circularidade). A fig. 3.9 mostra os desvios de convexidade e concavidade. TZ0 = D1 - d1 ⇒ Convexidade TZn = D2 - d2 ⇒ Concavidade

3. Desvios e Tolerâncias Geométricas
-55-
d
d1
D1
DDD
d d
D2
d1d2
D1
L
Fig. 3.9: Concavidade e convexidade Fig. 310 Conicidade A conicidade está definida na fig. 3.10. TZc = (D1 - d1)/l ⇒ Conicidade
Tolerância de forma de um Perfil Qualquer
É o espaço limitado por duas linhas, entre as quais estão situados círculos de
diâmetros "t", cujos centros encontram-se sobre uma linha que representa o perfil
geométrico ideal. O perfil real deve estar compreendido entre as duas linhas paralelas.
(Fig. 3.11)
LINHA REAL
Fig. 3.11: Tolerância de forma de um perfil qualquer
Aplicação: Cames, curvas especiais

3. Desvios e Tolerâncias Geométricas
-56-
Tolerância de forma de uma Superfície Qualquer
É o espaço limitado por dois planos, entre os quais estão situados círculos de
diâmetros "t", cujos centros encontram-se numa superfície que tem geometria ideal. O
perfil real deve estar compreendido entre as duas linhas paralelas. (Fig. 3.12)
ESFERA ØTs
Fig. 3.12: Tolerância de forma de um perfil qualquer
Aplicação: Esferas, superfícies especiais de revolução
3.4 Tolerâncias e Desvios (ou Diferenças) de Posição
Desvios de posição: É a diferença entre uma aresta ou superfície da peça e a posição
teórica prevista no projeto.
São definidos para superfícies associadas.
Tolerância de posição: É a variação permissível nas posições relativas dos
componentes da peça.
3.4.1 Orientação para dois Elementos Associados
Estes desvios são definidos para elementos (linhas ou superfícies) que têm pontos
em comum através de intersecção de suas linhas ou superfícies.

3. Desvios e Tolerâncias Geométricas
-57-
Tolerância de Inclinação (ou Angularidade)
A tolerância de angularidade pode ser definida de duas maneiras:
• É a diferença entre o ângulo máximo e o ângulo mínimo, entre os quais pode-se
localizar as duas superfícies. A tolerância admissível Tα é a diferença entre os
ângulos. (Fig. 3.13a)
• É a distância entre dois planos paralelos entre si. A superfície real deve estar situada
entre os dois planos paralelos. (Fig. 3.13b)
60º + 0' + 15''
ÂnguloNominal
Plano de Referência
Planos de Referência
Superfície Real
(a) (b)
Fig. 3.13: Tolerância de inclinação
Fig. 3.13B: Simbologia de Tolerância de inclinação
Tolerância de Perpendicularidade
Desvio de perpendicularidade é o desvio angular tomando-se como referência o ângulo
reto, tendo-se como elemento de referência uma superfície ou uma reta.
Tolerância de perpendicularidade entre duas retas: É a distância entre dois planos
paralelos entre si e perpendiculares à reta de referência.

3. Desvios e Tolerâncias Geométricas
-58-
Tolerância de perpendicularidade entre uma reta e um plano: É o diâmetro de um
cilindro ou a distância entre duas retas paralelas entre si e perpendiculares ao plano de
referência (Fig. 3.14).
Cilindro de Referência
Plano Básico
Plano Básico
Retas deReferência
Tpr
Simbologia
Fig. 3.14: Tolerância de perpendicularidade entre uma reta e um plano
Tolerância de Paralelismo
Tolerância de paralelismo entre retas e planos
A tolerância de paralelismo entre duas retas é o espaço contido em um cilindro de
diâmetro TPL cujo eixo é paralelo a uma das retas. Pode-se distinguir:
i) Tolerância de paralelismo entre duas retas em um mesmo plano: É a diferença entre
a máxima e a mínima distância entre duas linhas num determinado comprimento L ,
como mostra a Fig. 3.15. TPL = A-B. A especificação da tolerância de paralelismo entre
duas retas no mesmo plano está mostrada na Fig. 3.15B. Nas figuras 3.16 e 3.17 estão
mostrados alguns casos possíveis de erros de paralelismo.

3. Desvios e Tolerâncias Geométricas
-59-
BA
Falta deParalelismo
Fig. 3.15: Tolerância de paralelismo entre duas retas no mesmo plano
Fig. 3.15B: Simbologia de Tolerância de paralelismo entre duas retas no mesmo
plano
(a) Desenho
0,2 0,2
75,90
76,30
(b) Interpretação
(c) Variação Possível
75,90
76,3075,90
76,30
76,3075,90
Desenho
2 Furos paralelosentre si dentrode 0,05 mm (total)
76,30
75,90
Interpretação
X
Y
A distância Xnão deve variarda distância Ymais de 0,05 mm
Fig. 3.16: Interpretação de tolerâncias de
paralelismo a partir de cotas dimensionais
Fig. 3.17: Interpretação de tolerâncias e
paralelismo com notas específicas
ii) Tolerância de paralelismo entre eixos de superfícies de revolução: É o desvio
admissível de um eixo em relação ao outro.

3. Desvios e Tolerâncias Geométricas
-60-
iii) Tolerância de paralelismo entre um eixo e um plano: É a diferença entre as
distâncias máximas e mínimas entre o eixo e a superfície plana tomada como
referência (Fig. 3.18). Estes desvios ocorrem em operações de alargamento de furos.
A
B
Fig. 3.18: Tolerância de paralelismo entre um eixo e um plano
Tolerância de paralelismo entre dois planos
É a distância entre dois planos paralelos a um plano de referência, entre os quais
devem-se situar os planos reais (Fig. 3.19). A tolerância de paralelismo pode ser
definida também com relação a um comprimento de referência (Fig. 3.20). Conforme
esta figura, a superfície real deve estar situada em uma zona de tolerância limitada por
dois planos paralelos à superfície A e entre si e distantes entre si de 0,02 mm.
A
B
Superfícies Reais
Superfícies Planas
Superfícies de Referência
Fig. 3.19: Tolerância de paralelismo entre dois planos

3. Desvios e Tolerâncias Geométricas
-61-
Superfície A DESENHO
Paralelo à superfície A dentro de0,02 mm Total
Superfície A Zona
de
Tol.
0,0
2 m
m
Fig. 3.20: interpretação da tolerância de paralelismo entre dois planos
3.4.2 Posição para Elementos Associados
Tolerância de Localização
Os desvios de localização são definidos como as diferenças de um determinado
elemento (ponto, reta, plano) de sua posição teórica determinada através de um
sistema de coordenadas cartesianas ou polares.
Aplicação: Furos de fixação de tampas que devem ser fixadas em carcaças através de
parafusos e pinos de guia.
Tolerância de Localização do Ponto: É o diâmetro de um círculo cujo centro está
determinado pelas medidas nominais.
Aplicação: Furos de fixação de chapas finas onde a espessura é desprezível em relação
ao diâmetro.
Tolerância de Localização da Reta: É o diâmetro de um cilindro cuja linha de centro é o
diâmetro nominal, no caso de sua indicação numérica ser precedida pelo símbolo ∅.
(Fig. 3.21)

3. Desvios e Tolerâncias Geométricas
-62-
φ
Fig. 3.21: Tolerância de localização da reta
Tolerância de Localização do Plano: É a distância entre dois planos paralelos entre si e
dispostos simetricamente em relação ao plano considerado nominal.
Tolerância de Simetria
É a distância entre dois planos paralelos e simétricos com relação a um plano de
referência determinado pelas cotas nominais (Fig. 3.22).
Aplicação: Chavetas, estrias, rebaixos e ressaltos de forma prismática.
Plano deReferencia
Plano de Medida
Linha Real
Ts
Fig. 3.22: Tolerância de simetria

3. Desvios e Tolerâncias Geométricas
-63-
Fig. 3.22B: Simbologia de Tolerância de simetria
Tolerância de Coaxilidade
A tolerância de coaxilidade de uma reta em relação à outra tomada como referência é
o raio de um cilindro tendo como geratriz a reta de referência. A reta deve estar
situada dentro deste cilindro (Fig. 3.23)
α
Eixo Coaxial
Eixo de Referência
τTco Fig. 3.23: tolerância de coaxilidade
Os desvios de coaxilidade mais comuns são:
Coaxilidade com relação a uma superfície determinada: É a máxima distância TCO do
eixo da superfície que está sendo verificada até o eixo de simetria de uma superfície
predeterminada com relação ao comprimento total verificado (Fig. 3.24).

3. Desvios e Tolerâncias Geométricas
-64-
Tco
Supeficie deReferencia
Fig. 3.24: Tolerância de coaxilidade com relação a uma superfície determinada
Coaxilidade com relação a um eixo comum (desalinhamento): É a máxima distância
TCO do eixo da superfície que está sendo verificada até um eixo comum de duas ou
mais superfícies coaxiais com relação ao comprimento desta superfície (Fig. 3.25)
Eixo Comum
TcoTco
Fig. 3.25: Tolerância de Coaxilidade com relação a um eixo comum

3. Desvios e Tolerâncias Geométricas
-65-
Fig. 3.25B: Simbologia de Tolerância de Coaxilidade com relação a um eixo comum
Tolerância de Concentricidade
Concentricidade ocorre quando duas ou mais figuras geométricas regulares, tais como
cilindros, cones, esferas ou hexágonos têm um eixo comum. Qualquer variação do eixo
de simetria de uma das figuras com relação a um outro tomado como referência
caracterizará o desvio de concentricidade ou excentricidade.
Tolerância de concentricidade de uma linha de centro com relação à outra tomada
como referência: É o raio de um círculo Te com centro no ponto de referência. A
excentricidade deve ser medida em um plano perpendicular à linha de centro de
referência. (Fig. 3.26).
O desvio de concentricidade poderá variar de ponto para ponto, quando o plano de
medida vai-se deslocando paralelamente a si mesmo e perpendicularmente à linha de
centro. Ou seja, o desvio de concentricidade é um caso particular do desvio de
coaxilidade.
eixo 2
Plano demedida
Circulo menor: ACirculo maior: B
Teeixo de simetria
eixo 1
Fig. 3.26: tolerância de concentricidade

3. Desvios e Tolerâncias Geométricas
-66-
3.5 Tolerâncias e Desvios Compostos de Forma e Posição
Na maioria dos casos práticos não é possível determinar separadamente os desvios de
forma dos desvios de posição. Assim, ao se medir uma peça pode-se obter como
resultado ambos os desvios conjugados. Estes desvios compostos devem ser previstos
e limitados.
3.5.1 Tolerância de Batimento
Desvios de batida (ou batimento): São desvios compostos de forma e posição de
superfície de revolução quando medidos a partir de um eixo ou superfície de
referência.
Tolerância de batida (ou batimento): Indica a variação máxima admissível "t" da
posição do elemento considerado, em relação a um ponto fixo (um eixo ou superfície
de referência), no transcorrer de uma revolução completa sem se deslocar axialmente.
A tolerância de batida deve ser aplicada separadamente para cada posição medida.
As tolerâncias de batimento podem limitar os defeitos de circularidade, coaxilidade,
perpendicularidade ou de planicidade, desde que a soma destes defeitos não exceda o
valor da tolerância de batimento especificada.
Tolerância de Batida Radial
A tolerância de batida radial "Tr" será definida como o campo de tolerância,
determinado por um plano perpendicular ao eixo de giro, composto de dois círculos
concêntricos, distantes entre si de Tr (Fig. 3.27). As Fig. 3.28 mostra casos distintos de
medição do desvio de batida radial.

3. Desvios e Tolerâncias Geométricas
-67-
Tr
TR
Fig. 3.27: Tolerância de batida radial
A B
Tm
Tm
Superficie de medicao
Tr = 2 Tm(L.T.I)
Tr
Tm-Tm
Fig. 3.28: Interpretação da tolerância de batida radial
Batimento de uma Superfície Cônica: A tolerância de batida de uma superfície cônica
Tc será a distância entre superfícies cônicas concêntricas, dentro das quais deverá
encontrar-se a superfície real, quando a peça efetuar um giro completo sobre seu eixo
de simetria, sem se deslocar axialmente (Fig. 3.29).

3. Desvios e Tolerâncias Geométricas
-68-
Tc
Fig. 3.29: Tolerância de batida radial de uma superfície cônica
Tolerância de Batida Axial
A tolerância de batida axial "Ta" será definida como o campo de tolerância determinado
por duas superfícies paralelas entre si e perpendiculares ao eixo de rotação da peça,
dentro da qual deverá estar a superfície real, quando a peça efetuar uma volta
completa em torno do seu eixo de rotação (Fig. 3.30).
O desvio de batida axial também é conhecido como excentricidade frontal ou
excentricidade de face (face run-out).
Ta Ta
Fig. 3.30: Tolerância de batida axial
A tolerância de batida axial deverá prever erros compostos de forma (planicidade) e
posição (perpendicularismo das faces em relação à linha de centro).
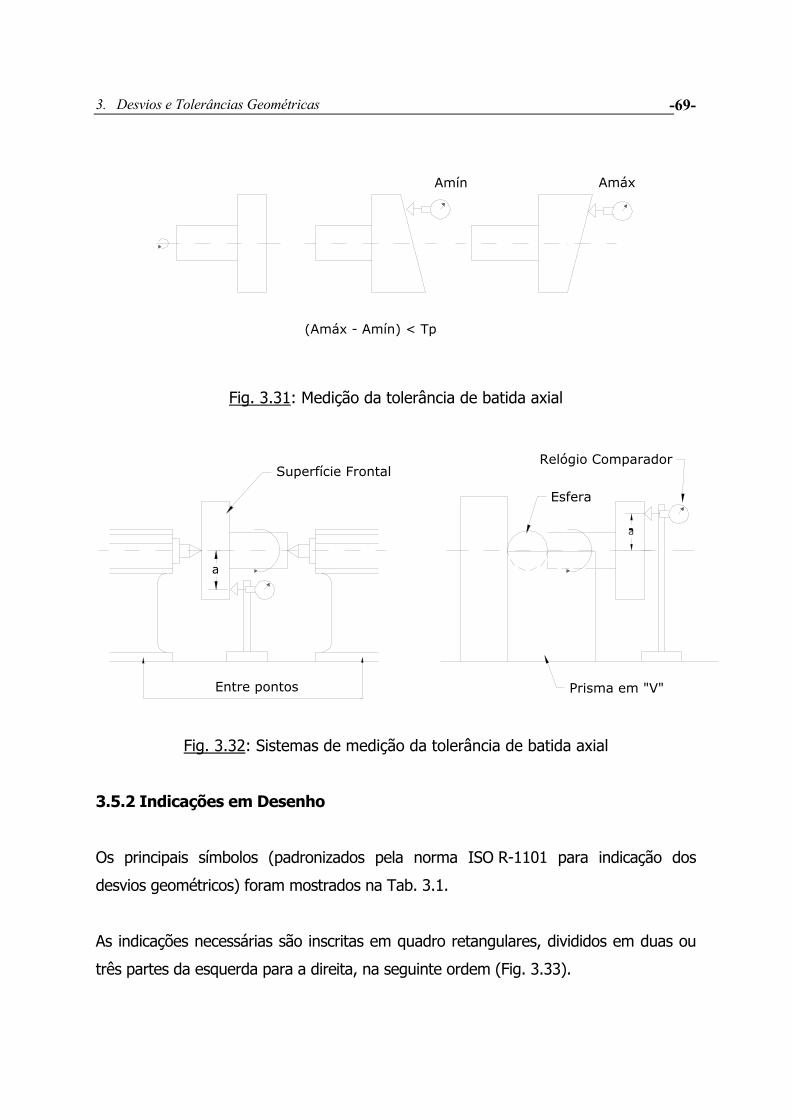
Para a medição desta tolerância, faz-se girar a peça ao redor de um eixo perpendicular
à superfície a ser medida, impedindo seu deslocamento axial (Fig. 3.31). A Fig. 3.32
mostra casos comuns de medição do desvio de batida axial.
3. Desvios e Tolerâncias Geométricas
-69-
(Amáx - Amín) < Tp
Amín Amáx
Fig. 3.31: Medição da tolerância de batida axial
Superfície FrontalRelógio Comparador
Esfera
Prisma em "V"Entre pontos
a
Fig. 3.32: Sistemas de medição da tolerância de batida axial
3.5.2 Indicações em Desenho
Os principais símbolos (padronizados pela norma ISO R-1101 para indicação dos
desvios geométricos) foram mostrados na Tab. 3.1.
As indicações necessárias são inscritas em quadro retangulares, divididos em duas ou
três partes da esquerda para a direita, na seguinte ordem (Fig. 3.33).

3. Desvios e Tolerâncias Geométricas
-70-
• Símbolo referente à característica de tolerância;
• Valor da tolerância; Valor total na unidade utilizada para cotação linear. Este valor
deve ser precedido de ∅ se a faixa de tolerância for circular ou cilíndrica.
• Letra(s) que permite(m) identificar o elemento de referência.
• A indicação da condição de máximo material deve ser colocada à direita do valor da
tolerância específica.
A Fig. 3.33 mostra a forma de indicação dos desvios geométricos em desenhos
mecânicos.
0,1 B
Símbolo
Valor da Tolerância
Referência
Fig. 3.33: forma de indicação dos desvios de forma e posição
Indicação das Tolerâncias • Os retângulos mostrados na Fig. 3.33 são ligados ao elemento que se deseja
verificar por uma linha com uma seta, indicando o elemento a ser controlado.
• Caso a indicação direta do elemento não seja adequada, pode-se indicá-la sobre o
prolongamento de seu contorno.
3. Desvios e Tolerâncias Geométricas
-71-
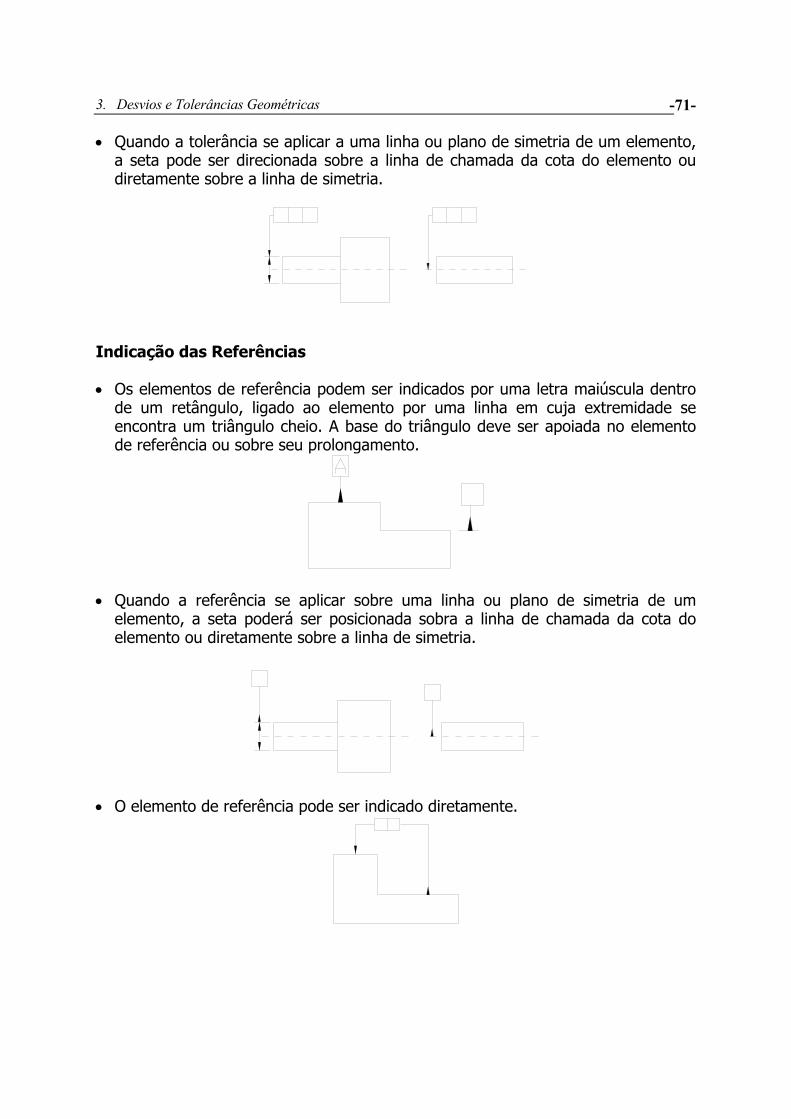
• Quando a tolerância se aplicar a uma linha ou plano de simetria de um elemento, a seta pode ser direcionada sobre a linha de chamada da cota do elemento ou diretamente sobre a linha de simetria.
Indicação das Referências • Os elementos de referência podem ser indicados por uma letra maiúscula dentro
de um retângulo, ligado ao elemento por uma linha em cuja extremidade se encontra um triângulo cheio. A base do triângulo deve ser apoiada no elemento de referência ou sobre seu prolongamento.
• Quando a referência se aplicar sobre uma linha ou plano de simetria de um
elemento, a seta poderá ser posicionada sobra a linha de chamada da cota do elemento ou diretamente sobre a linha de simetria.
• O elemento de referência pode ser indicado diretamente.

3. Desvios e Tolerâncias Geométricas
-72-
EXEMPLOS DE APLICAÇÃO A Fig. 3.34 mostra um virabrequim:
Ø570
0-0,08
Ø570
0-0,08
0,05
Fig. 3.34: Indicação de tolerância geométricas em virabrequim
• O diâmetro 570 mm (inferior) deve estar situado entre duas circunferências
concêntricas situadas no mesmo plano, cuja diferença de raios é 0,03 mm.
0,03
• A linha de centro do diâmetro 570 mm (superior) deve estar situada entre duas
retas paralelas, cuja distância entre si é de 0,05 mm e que são respectivamente
paralelas à linha de centro do diâmetro inferior.
0,05
• No plano indicado, a linha superior deve estar entre duas retas paralelas cuja
distância entre si é de 0,05 mm e respectivamente paralelas à linha inferior.
0,05

3. Desvios e Tolerâncias Geométricas
-73-
A Fig. 3.35 mostra uma roda de atrito:
φ
Fig. 3.35: Indicação de tolerância geométricas em uma roda de atrito
• As superfícies da face do cubo e da face do anel externo devem estar situadas
entre dois planos perpendiculares à linha de centro do furo. Estes planos devem ser
paralelos, distantes entre si de 0,01 mm.
0,01
• O diâmetro externo deve ter uma batida radial máxima de 0,02 mm, ou seja, a peça
ao girar apoiada na linha de centros, tendo um relógio comparador colocado na
superfície indicada, este não deverá indicar mais que 0,04 mm (2X0,02). São
considerados nesta tolerância os erros de ovalização e excentricidade.
0,02
• A batida da superfície cônica em relação à linha de centro correspondente ao
diâmetro A, não deve ultrapassar 0,04 mm. A leitura em um relógio comparador é
semelhante ao caso anterior.
0,04

3. Desvios e Tolerâncias Geométricas
-74-
A Fig. 3.36 mostra um mandril porta-ferramenta
φφ C
16,1+0,18 0
8,2H11
Vista C
Fig. 3.36 Indicação de tolerância geométricas em um mandril porta-ferramenta
• A linha de centro do rasgo com diâmetro 16,1 mm deve estar situada entre dois
planos paralelos, distantes entre si de 0,06 mm e respectivamente paralelos à linha
de centro da superfície A. Os rasgos deverão estar posicionados simetricamente em
relação à linha de centro da superfície A.
0,06
3.5.3 Tolerância de Verdadeira Posição
SISTEMA CARTESIANO
O desenho de uma peça normalmente específica a posição exata de um elemento
desta (furo, degrau, ressalto, contorno, etc.), localizando-a através de cotas lineares x

3. Desvios e Tolerâncias Geométricas
-75-
e y de um sistema cartesiano. Assim, cada elemento é referenciado a dois planos de
referência comuns, e através destes, referenciado indiretamente a outro elemento
qualquer.
Analisando-se o conceito de referência cartesiana, chega-se a conclusão de que os
elementos de uma peça (para efeito de funcionamento e intercambiabilidade) são
relacionados naturalmente entre si. Os planos de referência são artifícios
intermediários, porém necessários, para se determinar a relação preliminar entre os
elementos.
As dimensões cartesianas de localização estão afetadas por uma tolerância que
determina sua máxima e mínima dimensão.
Condição de Máximo Material
É a condição na qual a peça terá o máximo possível de material, ou seja, dimensão
mínima para furos e máxima para eixos.
A condição de máximo material é aplicado à elementos mecânicos que exigem ajustes
com folga. Nesta situação, a folga mínima ocorrerá na condição de máximo material.
A posição mais crítica de montagem ocorre na condição de máximo material e nas
condições extremas de desvios de forma e posição.
A definição de máximo material possibilita ampliar os limites de tolerâncias
especificadas para uma ou várias medidas coordenadas, desde que sejam mantidos os
requisitos de funcionabilidade e intercambiabilidade.
Requisitos para aplicação da condição de máximo material:
• Para que a condição de máximo material possa ser aplicada, devem existir no
mínimo duas medidas coordenadas ou outras características inerentes aos
elementos como tolerâncias de forma e posição.
• A condição de máximo material permite transferir excesso de material contido em

3. Desvios e Tolerâncias Geométricas
-76-
uma medida coordenada para outra. A Fig. 3.37 mostra o princípio de medidas
coordenadas. Se o diâmetro do furo D aumenta, ou seja, afasta-se da condição de
máximo material, pode-se admitir que a tolerância da distância x (posição) seja
proporcionalmente excedida.
Fig. 3.37: Exemplo de aplicação de medidas coordenadas
A condição de máximo material permite uma variação no valor especificado da
tolerância de forma ou de posição, na mesma proporção em que este elemento se
afaste da sua condição de máximo material, dentro dos limites de tolerância
dimensional especificado.
Em certas situações a condição de máximo material não pode ser aplicada pois pode
afetar o funcionamento de pares cinemáticos como centros de engrenagens, furos com
roscas e ajustes com interferência.
Tolerância de Verdadeira Posição: É o desvio total permissível na posição e na
forma do elemento real em relação à posição teórica do elemento de forma geométrica
ideal.
A Tolerância de verdadeira posição (TPO) resulta em uma zona de tolerância circular
em torno da posição teórica.
A Tolerância de verdadeira posição (TPO) deve ser determinada para o caso mais
crítico de montagem, ou seja, na condição .

3. Desvios e Tolerâncias Geométricas
-77-
Como na , a tolerância de verdadeira posição (TPO) deve ser determinada
somente para ajustes com folga.
Principais vantagens de se adotar a tolerância de verdadeira posição:
• Evitar acúmulos de tolerâncias na localização entre dois elementos de uma peça que
ocorre quando é utilizado o sistema cartesiano. O acúmulo observado obriga que a
peça seja fabricada com tolerâncias de localização menores para garantir
intercambiabilidade e funcionabilidade. Este problema torna-se cada vez mais
complexo à medida que aumentam os elementos inter-relacionados, aumentando-
se, conseqüentemente, os acúmulos e diminuindo-se as tolerâncias de fabricação.
• Utilização para verificação das peças, de calibradores de pino, que permitem a
localização de um elemento em relação ao outro, com maior exatidão e maior
facilidade que o sistema cartesiano. Por isto é utilizado com freqüência em
usinagens de alta série.
A Fig. 3.38 mostra a interpretação geométrica para peças de forma cilíndrica. A peça
interna (furo) é adotada em sua posição teórica, que é estabelecida por dimensões
básicas sem tolerância a partir das superfícies de referência.
FN
Tpoi
FM
De
De
FF
Tpoe
DFi
Fig. 3.38: Interpretação geométrica da tolerância de verdadeira posição
Di = Dimensão do furo na condição de máximo material;
De = Dimensão do eixo na condição de máximo material;

3. Desvios e Tolerâncias Geométricas
-78-
TPOi = Tolerância de posicionamento (verdadeira posição) do furo;
TPOe = Tolerância de posicionamento (verdadeira posição) do eixo;
Tpoi = Di - DFi ⇒ DFi = Di - 2Tpoi (3.1)
2
Tpoe = DFe - De ⇒ DFe = De + 2Tpoe (3.2)
2
TPOi e TPOe representam tolerâncias de forma e posição dos diâmetros Di e De.
Teoricamente: Dfuro=Di e Deixo= De.
Na realidade ocorrem variações dos diâmetros devido à erros de forma, de posição
e dimensional. DFe = Dimensão funcional do eixo e DFi = Dimensão funcional do
furo.
De ± 2TPOe representa os limites, dentro dos quais devem-se encontrar o eixo,
considerando-se todos os desvios (forma e posição). (Fig. 3.39)
Di ± 2TPOi representa os limites, dentro dos quais devem-se encontrar o furo,
considerando-se todos os desvios (forma e posição).(Fig. 3.40)
LimitesAceitáveis
TpoeTpoe De
DFe
Variaçãopossível
Tpoi Tpoi
DFi
Di
Fig. 3.39: Interpretação da tolerância de
verdadeira posição para eixos
Fig. 3.40: Interpretação da tolerância de
verdadeira posição para furos

3. Desvios e Tolerâncias Geométricas
-79-
FOLGAS
Folga Funcional Ff: Determinará a folga mínima necessária entre as peças em
acoplamento, na condição limite de montagem.
022
=−−=−
= ffefifefi
f FDDDDF (3.3)
Substituindo-se as Eqs. (3.1) e (3.2) na Eq.(3.3) obtém-se a equação geral para
tolerância de verdadeira posição:
0222 =−−−− fPOeePOii FTDTD (3.4)
Observe: Quando um dos elementos afasta-se da verdadeira posição ocorre um
aumento da Ff.
Folga Nominal FN: FN determina a folga teórica, caso não existisse os desvios
geométricos. Assim,
2D - D = F ei
N (3.5)
Folga Máxima (FM:): FM determina a máxima folga possível. Ela ocorre quando o furo
tem dimensão máxima Di+2TPOi e o eixo a dimensão mínima De-2TPOe. Assim, FM
pode ser calculada pela Equação
Para determinação das folga funcional e máxima para eixos deve-se considerar três
casos distintos:
2T2 + D - T2 + D = F POeePOii
m (3.6)
CASO A: A posição do eixo é controlada na operação de usinagem. Neste caso, os
eixos são usinados a partir do sólido, juntamente com a peça, não havendo sub-
montagens. ⇒ Aplicar a Eq.(3.4)
CASO B: A posição do eixo é obtida pelo desvio composto da submontagem advinda da
fixação de pinos ou parafusos rosqueados em furos. A posição do eixo (pino ou

3. Desvios e Tolerâncias Geométricas
-80-
parafuso) é uma função do furo usinado. A tolerância de verdadeira posição do eixo
será:
2R + T = T e
POiPOe
(3.7)
onde Re é o desvio total permissível de forma e posição do eixo em relação ao furo no
qual está fixado. A Eq. (3.4) fica:
0 = F2 - R - D - T4 - D feePOii (3.8)
A Folga máxima Fm será calculada pela Equação:
2R + D - T4 + D = F eePOii
m (3.9)
CASO C: Semelhante ao grupo B, mas todos os furos são passantes. Neste caso os
eixos são auto-alinhados. Neste caso ter-se-á
2R = T
*e
POe
(3.10)
A Eq. (3.4) fica:
0 = F2 - R - D - T2 - D f*
eePOii (3.11)
A Folga máxima Fm será calculada pela Equação:
2R + D - T2 - D = F
*eePOii
m
(3.12)
COMPARAÇÃO ENTRE SISTEMA CARTESIANO E VERDADEIRA POSIÇÃO
A Fig. 3.41 mostra duas peças idênticas dimensionadas por ambos os sistemas. No

3. Desvios e Tolerâncias Geométricas
-81-
sistema cartesiano as cotas do ponto são U±u e V±v, respectivamente nos eixos
horizontal e vertical. As tolerâncias nestes eixos são u e v. A zona de tolerância será
um retângulo com lados 2u e 2v. Em verdadeira posição, por definição, a zona de
tolerância será um círculo de raio w. Estas zonas (retangular e círculo) representam as
áreas nas quais devem estar localizados os centros dos furos. A comparação destas
duas zonas mostra como o sistema cartesiano pode restringir as tolerâncias de
fabricação, principalmente em médias e altas produções, onde a verificação é feita
através de calibradores de pinos circulares ou calibradores passa-não-passa.
Calibradores fixosverificam esta região
Furo H±γ
U ± u
Zona deTolerância
para o centrodo furo
ω = √u2 + v2
M2M4
M3
V ± v
Zona de Tolerânciapara o centro do furo
ω
Furo H±γ localizadoem verdadeira posiçãodentro do raio ω
Fig. 3.41: Comparação entre o sistema cartesiano e verdadeira posição
Pode-se mostrar que
v + u = w 22 (3.13)
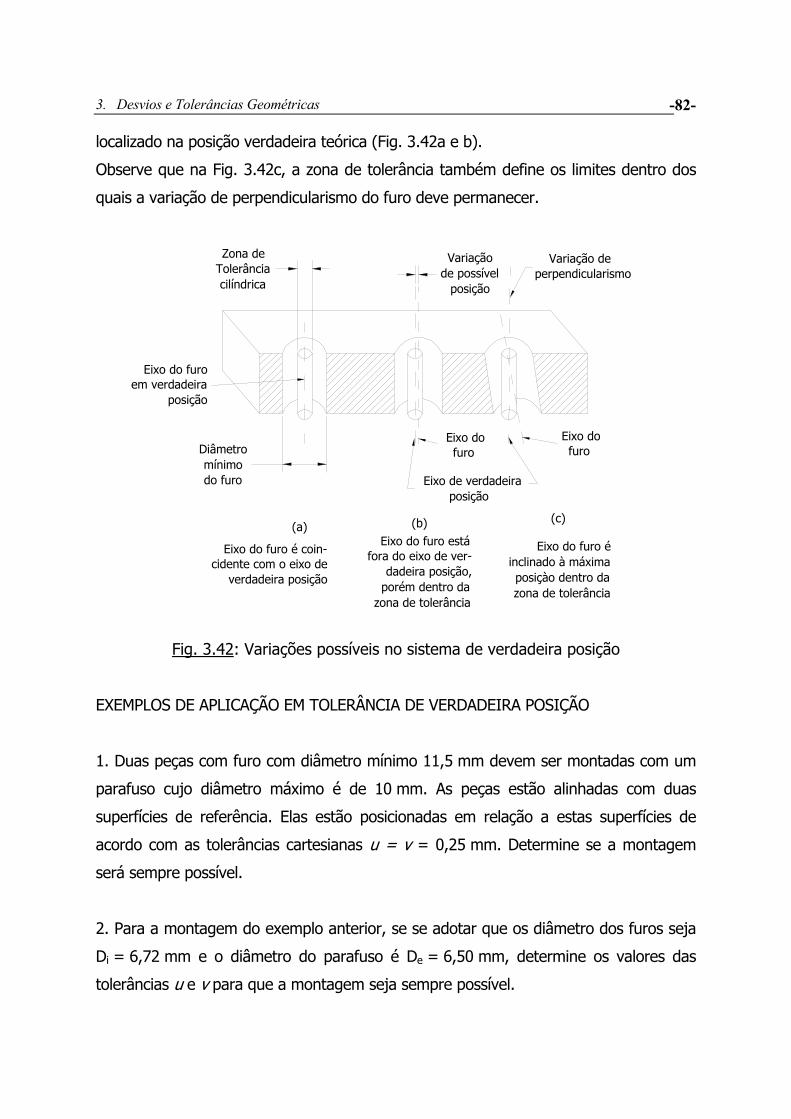
A fig. 3.42 mostra variações possíveis do dimensionamento por verdadeira posição.
Considerando-se que o furo esteja em sua condição de máximo material, ou seja, com
o diâmetro mínimo, a linha de centro deverá localizar-se dentro da zona de tolerância
cilíndrica, tendo por raio a tolerância de verdadeira posição TPO e com o centro
3. Desvios e Tolerâncias Geométricas
-82-
localizado na posição verdadeira teórica (Fig. 3.42a e b).
Observe que na Fig. 3.42c, a zona de tolerância também define os limites dentro dos
quais a variação de perpendicularismo do furo deve permanecer.
Variaçãode possível
posição
Zona deTolerânciacilíndrica
Variação deperpendicularismo
Eixo do furo
Eixo do furo
Eixo de verdadeira posição
Diâmetromínimodo furo
Eixo do furoem verdadeira
posição
(a) (b) (c)
Eixo do furo é coin-cidente com o eixo de
verdadeira posição
Eixo do furo estáfora do eixo de ver-
dadeira posição,porém dentro da
zona de tolerância
Eixo do furo éinclinado à máximaposiçào dentro dazona de tolerância
Fig. 3.42: Variações possíveis no sistema de verdadeira posição
EXEMPLOS DE APLICAÇÃO EM TOLERÂNCIA DE VERDADEIRA POSIÇÃO
1. Duas peças com furo com diâmetro mínimo 11,5 mm devem ser montadas com um
parafuso cujo diâmetro máximo é de 10 mm. As peças estão alinhadas com duas
superfícies de referência. Elas estão posicionadas em relação a estas superfícies de
acordo com as tolerâncias cartesianas u = v = 0,25 mm. Determine se a montagem
será sempre possível.
2. Para a montagem do exemplo anterior, se se adotar que os diâmetro dos furos seja
Di = 6,72 mm e o diâmetro do parafuso é De = 6,50 mm, determine os valores das
tolerâncias u e v para que a montagem seja sempre possível.

3. Desvios e Tolerâncias Geométricas
-83-
3. De acordo com a especificação de um projeto, um parafuso rosqueado em uma
determinada peça, com diâmetro máximo de 6,5 mm deverá ser montado em outra
peça, cujo diâmetro mínimo do furo é 6,75 mm. Adotar as tolerâncias retangulares de
posicionamento do furo e do parafuso iguais nos eixos cartesianos.
Determinar as tolerâncias cartesianas e de verdadeira posição para as duas peças
(parafuso e furo), a fim de que a montagem seja sempre possível, dentro de todas as
variações dimensionais possíveis. Considere que as variações de forma e de posição do
parafuso, com relação à peça na qual ele está fixado como desprezível.
A seguir tem-se um resumo de todos os desvios e tolerâncias geométricas e seus
respectivos significados.

3. Desvios e Tolerâncias Geométricas
-84-
3.5.4 Resumo
A Tab. 3.2 mostra um resumo das tolerâncias geométricas e respectivas indicações
em desenhos.
Tab. 3.2: Indicação de tolerâncias geométricas em desenhos e seus significados
Símbolo e característica a
tolerar
Campo de
Tolerância
Codificação em
desenho e exemplo
Descrição
Cilindricidade
A superfície real deve situar-se
entre dois cilindros coaxiais
afastados de uma distância radial
de t = 0.05.
Forma de um
perfil qualquer
φt
O perfil real deve situar-se entre
duas superfícies cujos
afastamentos relativos é
delimitado por círculos de
diâmetro t = 0.03 mm. Os
centros destes círculos
encontram-se sobre a linha ideal
de contorno
Tole
rânc
ia d
e Fo
rma
Forma de uma
superfície
qualquer
esf φ Ts
A superfície real deve situar-se
entre duas superfícies onde o
afastamento é delimitado por
esferas relativas de diâmetro
t = 0.03 mm. Os centros destas
esferas situam-se junto à
superfície geométrica ideal.
t

3. Desvios e Tolerâncias Geométricas
-85-
Símbolo e característica a
tolerar
Campo de
Tolerância
Codificação em
desenho e exemplo
Descrição
O eixo do pino deve situar-se
dentro de uma zona cilíndrica
de diâmetro t = 0.03 mm.
Retilineidade eixo
- contorno
t
Qualquer linha de comprimento
100 mm do elemento cilíndrico
indicado deve situar-se entre
duas retas paralelas
distanciadas de t = 0.1 mm.
Planesa
A superfície tolerada deve
situar-se entre dois planos
paralelos distanciados de t =
0.05 mm.
Tole
rânc
ia d
e Fo
rma
Circularidade
O contorno de qualquer secção
deverá estar dentro de uma
coroa circular de espessura
t = 0.02 mm
φt
t

3. Desvios e Tolerâncias Geométricas
-86-
Símbolo e característica a
tolerar
Campo de
Tolerância
Codificação em
desenho e exemplo
Descrição
O eixo superior deve situar-se
internamente a um cilindro de
diâmetro t = 0.1 mm, paralelo
ao eixo inferior (de referência).
Paralelismo t
A superfície real deve situar-se
entre dois planos paralelos à
superfície de referência e
distantes entre si de 0.01 mm.
Perpendicularidade
O eixo do componente deve
situar-se entre dois planos
perpendiculares à superfície de
referência, distantes entre sí de
t = 0.05 mm.
Tole
rânc
ia d
e O
rient
ação
Inclinação
t
α
O eixo do furo deve situar-se
entre dois planos distanciados
de t = 0.01 mm e paralelos a
um plano inclinado de 600 em
relação ao plano de referência
(superfície de referência).
φt
t

3. Desvios e Tolerâncias Geométricas
-87-
Símbolo e característica a
tolerar
Campo de
Tolerância
Codificação em
desenho e exemplo
Descrição
Batimento axial
t
Ao movimentar-se em torno do
eixo de referência D, o
movimento de direção axial de
qualquer posição do cilindro não
deve ultrapassar o valor de
t = 0.03 mm.
Tole
rânc
ia d
e Ba
timen
to
Batimento radial
t
Ao movimentar-se em torno do
eixo de referência AB, não pode
haver um erro de giro superior
a t = 0.02 mm em qualquer
plano transversal ao cilindro.
Símbolo e característica a
tolerar
Campo de
Tolerância
Codificação em
desenho e
exemplo
Descrição
Posição de um
elemento
φt
O eixo do furo deve situar-se
no interior de um cilindro com
diâmetro t = 0.05 mm, cujo
eixo situa-se na posição
geométrica ideal (cotas em
molduras) do furo.
Simetria
t
O plano médio do rasgo deve
situar-se entre dois planos
paralelos distanciados de t =
0.08 mm, posicionados
simetricamente em relação ao
plano médio do elemento de
referência.
Tole
rânc
ia d
e Po
siçã
o
Concentricidade e
Coaxialidade
φt
O eixo do elemento com
tolerância deve situar-se no
interior de um cilindro com
diâmetro t = 0.03 mm, cujo
eixo está alinhado com o eixo
do elemento de referência.

3. Desvios e Tolerâncias Geométricas
-88-
Exemplo:
Exemplo de verificação de desvios geométricos na fabricação de cilindros de motor
de combustão interna