development of guidance and control system for parafoil-payload system vvr subbarao, sc ‘c’...
TRANSCRIPT

Development of
Guidance and Control System for
Parafoil-Payload System
VVR Subbarao, Sc ‘C’Flight Mechanics & Control Engineering
ADE

09 June 07 Workshop on Mathematical Engineering
2
Parafoil-Payload System
• Control Surfaces – 1 pair at the Trailing Edge
• Symmetrical Deflection
• Changes flight path angle and rate of descent
• Asymmetrical Deflection
• Generates turn
Cell`
Leading Edge
Payload
Steering Lines
Suspension Lines
Stabilizer Panels
Differences with Aircraft
• Flexible lifting surface
• Centre of mass is suspended below canopy
• Control is achieved by changing parafoil shape
• No external power to push forward
Advantages• Sufficient glide and wind penetration• Low potential damage to payload• Fly aircraft at safe stand-off distance• Greater offset distance for given altitude

09 June 07 Workshop on Mathematical Engineering
3
CADS
Name Controlled Aerial Delivery SystemObjective To demonstrate the technology for precise delivery of a payload of 500 kg using a Ram Air Parafaoil

09 June 07 Workshop on Mathematical Engineering
4
Airborne Guidance &Control System`
TaskTo develop Airborne Guidance and Control System to meet
required CEP of 100m
Followed Strategy• Phase I
– Developing path control in 2-D plane on 80kg p/p system• To assess the control effectiveness of parafoil• To arrive the suitable guidance and control scheme
• Phase II– Development of guidance and control scheme to make touch down
within 100m CEP• Design of Energy Management Maneuvers• Extension of these CLAW for 300kg parafoil

Phase I

09 June 07 Workshop on Mathematical Engineering
6
Issues• Simulation Model
– Conventional 6 DOF equations do not hold– Multi-body dynamics
• 4, 6, 9, 12 Degree-of-Freedom– Lifting surface is not rigid
• Flexible canopy
• Aerodynamic Data– Not available at the beginning– Data was generated semi-rigid canopy– Later data available only for 500kg parafoil
• Stability and control derivatives• No rate derivatives
• Data Generation Trials– Controlled from ground– Planned data generation trials– Developed 4 DOF model

09 June 07 Workshop on Mathematical Engineering
7
Ground based Guidance and Control System Architecture
Analog
RS 232On-Board Sub-Systems
PFCC BL 2120
Actuators
GPS Receiver
Alt. Sensor
Heading
DRUNMEA
Tx,Rx
Tx, RxPt & SB Lanyard Commands
Ground Sub-Systems
JoyStick
Issues
•Vehicle state information
•Sensors Mounting
•Sensors selection

09 June 07 Workshop on Mathematical Engineering
8
4 DOF Mathematical Model
• Assumption– parafoil-payload (p/p) load system as a single rigid body.
• Simulates – the forward and downward translations
– roll and yaw (turn) motions of the para-foil.
– Does not required much aero data
• Used– to finalize the implementation of control laws
– In Hardware-In-Loop Simulation to close control loop
– To design failure logics
– Train ground pilot
09 June 07 Workshop on Mathematical Engineering
9
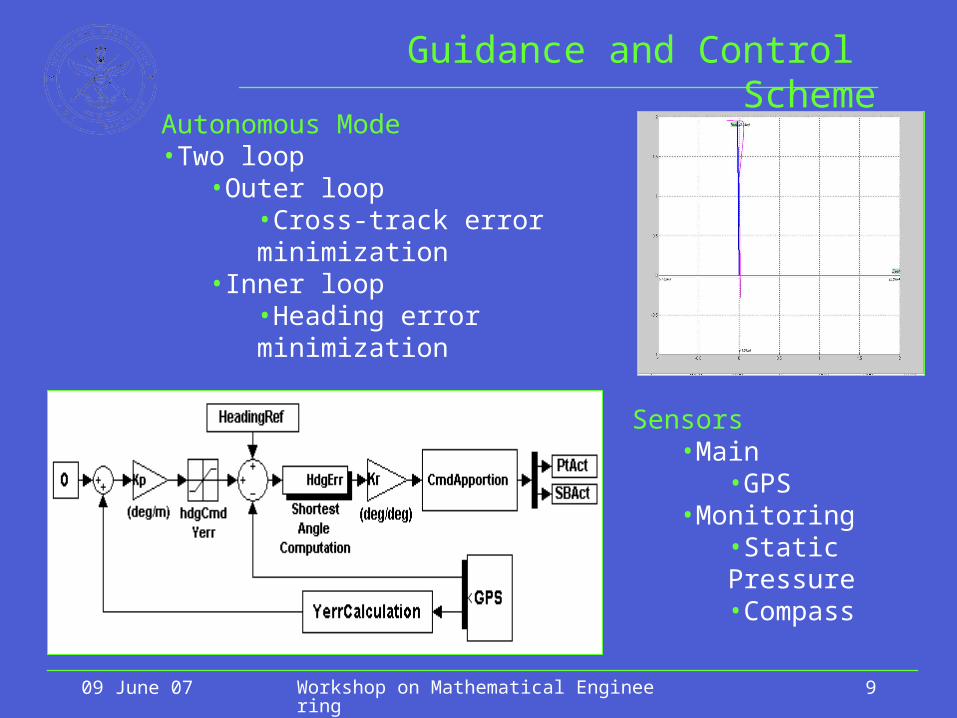
Guidance and Control Scheme
Autonomous Mode•Two loop
•Outer loop•Cross-track error minimization
•Inner loop•Heading error minimization
Sensors•Main
•GPS•Monitoring
•Static Pressure•Compass

09 June 07 Workshop on Mathematical Engineering
10
AG&CS Architecture
ParaFlight Control
Computer
On-board DRU
HeadingSensor
GPS Antenna
IAS Transducer
Altitude Transducer
Proximity Sensor
Port Lanyard Actuator
StarboardLanyardActuator
HandheldTerminal
TX/RX CBL 2120
Parachute Power Supply
RS 232
RS 422
Analog
Analog
RS 232
Target Point

09 June 07 Workshop on Mathematical Engineering
11
Phase II

09 June 07 Workshop on Mathematical Engineering
12
Energy Management Maneuver
• Objective– To ensure the touchdown within CEP– Selected Fig-of-Eight Maneuver for altitude management– Length of leg is fixed considering turn time

09 June 07 Workshop on Mathematical Engineering
13
300kg p/p system
• Sluggishness response– No turn rate response up to 20% of differential command
• No aerodynamic rate derivative data• Model derived from flight data

09 June 07 Workshop on Mathematical Engineering
14
Challenges
• Design of Guidance and Control Scheme– catering to high wind– Payload mass variations
• Terminal Guidance for Soft Landing– Flight path can be influenced only with symmetrical deflection above 50% of
total deflection– Turn and altitude control cannot simultaneously done
• Sluggish Response– No Turn rate for command less than 20% of total command– Non-linear turn rate response against differential command
• Gain Scheduling– Measuring wind magnitude and direction– Air speed measurement