développement des transducteurs ultrasonores...
TRANSCRIPT

N° d'ordre 01 ISAL 0031 Année 2001
THESE
présentée
DEVANT L'INSTITUT NATIONAL DES SCIENCES APPLIQUEES DE LYON
pour obtenir
LE GRADE DE DOCTEUR
FORMATION DOCTORALE : Images & Systèmes.ECOLE DOCTORALE : Electronique, Electrotechnique, Automatique.
PAR
JEAN-PIERRE SFERRUZZA
DEVELOPPEMENT DES TRANSDUCTEURS ULTRASONORES
ELEMENTAIRES EN VUE DE REDUIRE LA DIMENSION DES GENERATEURS
D'ONDES DE CHOC.
Soutenue le 14 Septembre 2001 devant la Commission d'Examen
Jury MM. Mathias FINK RapporteurFrédéric PATAT RapporteurPaul GONNARDDominique CATHIGNOL DirecteurFrançois LACOSTE

Remerciements
Je tiens tout d'abord à remercier Dominique Cathignol qui m'a accueilli au sein de l'unité 281
de l'INSERM et qui fut mon directeur de thèse. C'est avec une constance et une droiture exemplaires
qu'il su me soutenir dans mes efforts et notamment dans les moments les plus difficiles. Ce travail
ne serait pas ce qu'il est sans sa bienveillance et sa disponibilité à faire bénéficier ses étudiants de
ses conseils éclairés et de son expérience.
J'adresse également de sincères remerciements à Alain Bire pour son aide irremplaçable dans
l'élaboration des systèmes électriques et le déroulement des expérience, pour son soutien moral et sa
sympathie. J'ai énormément appris en travaillant à ses côtés durant quatre ans. Je souhaite remercier
Adrien Matias pour sa disponibilité et les nombreux services qu'il m'a rendu, ainsi qu'Yves Theillère
pour son aide dans la confection des pièces mécaniques. Je remercie Rémi Souchon pour ses
conseils précieux en informatique et pour son aide dans sa mise au point du système d'acquisition,
ainsi que Françoise Chavrier pour son aide précieuse dans le développement du modèle de
transducteur. Je souhaite par ailleurs remercier Jean-Louis Mestas pour l'aide qu'il m'a apporté
chaque fois que j'en avais besoin. Enfin, je tiens à saluer le reste du personnel du laboratoire, en
particulier Jean-Yves Chapelon et l'ensemble des stagiaires et étudiants, que je ne citerai pas de peur
d'en oublier.
Je remercie très vivement la société EDAP-Technomed qui fut mon employeur durant les
trois années de thèse et tout particulièrement François Lacoste, Frédérique Tardy et Patrick
Villemagne.

2
SOMMAIRE
INTRODUCTION 6
CHAPITRE 1 : GÉNÉRATION ET DÉTECTION DES ONDES DE CHOC 9
1 La lithiase urinaire et la lithotritie 9
2 Les principaux lithotriteurs 13
2.1 Les générateurs d'ondes de choc 13
2.2 Le générateur électro-hydraulique 14
2.3 Le générateur électromagnétique 16
2.4 Le générateur piézo-électrique 17
2.5 Avantages et inconvénients des différentes technologies de générateurs 17
3 Les générateurs piézo-électriques 24
3.1 Le LT-02 24
3.2 Le Piezolith 2501 26
3.3 Le générateur 274 éléments de l'INSERM 28
4 Les hydrophones 31
4.1 Les hydrophones PZT 32
4.2 Les hydrophones PVDF 32
4.3 Les hydrophones à fibre optique 34
CHAPITRE 2 : MESURES DU CHAMP ACOUSTIQUE DE DIFFÉRENTS
GÉNÉRATEURS D'ONDES DE CHOC : VERS UN OBJECTIF DE NOUVEAU
GÉNÉRATEUR PIÉZO-ÉLECTRIQUE 37
1 Introduction 37
2 Les générateurs 38
2.1 Le lithotriteur électro-conductif EDAP-Technomed Sonolith Praktis 38
2.2 Le lithotriteur électromagnétique Dornier Lithotripter S 40
2.3 Le lithotriteur piézo-électrique EDAP-Technomed LT-02 41
3 Mesure de la répartition de pression sur une coupole équivalente 42
3
3.1 Distance entre le point focal et l'hydrophone 42
3.2 EDAP-Technomed Praktis 43
3.3 Dornier Lithotripter S 44
3.4 EDAP-Technomed LT-02 45
3.5 Exploitation des résultats de mesure 46
4 Résultats 47
4.1 Maxima de pression en fonction de l'angle 47
4.2 Pression maximale équivalente en fonction de la puissance 49
4.3 Formes temporelles de la pression 50
5 Discussion et Conclusion 53
CHAPITRE 3 : MODÉLISATION TEMPORELLE D'UN TRANSDUCTEUR
ULTRASONORE EXCITÉ PAR DÉCHARGE CAPACITIVE 58
1 Introduction 58
2 Rappel des équations régissant le fonctionnement d'un transducteur mince 59
3 Méthode d'analyse 61
4 Vérification expérimentale 65
4.1 Matériel et méthodes 65
4.1.1 Transducteur 65
4.1.2 Excitation électrique 66
4.1.3 Mesures 67
4.1.4 Modélisation de l'exemple proposé 67
4.2 Résultats 68
4.2.1 Loi R(t) décrivant l'état du commutateur 68
4.2.2 Résultats de la modélisation 69
5 Discussion 71
6 Conclusion 73

4
CHAPITRE 4 : DÉTERMINATION EXPÉRIMENTALE D'UN MATÉRIAU PIÉZO-
ÉLECTRIQUE 74
1 Introduction 74
2 L'excitation électrique des transducteurs 75
2.1 Introduction 75
2.2 Principe 76
2.3 Vérification expérimentale – matériel et méthodes 79
2.4 Résultats et discussion 81
2.5 Conclusion 83
3 Matériel 84
3.1 Matériaux testés 84
3.2 Epaisseur des transducteurs 85
3.3 Générateur d'impulsions électriques 86
3.4 Montage mécanique des transducteurs et mesures de pression 89
4 Méthodes 90
4.1 Etude de la tenue en tension des différents matériaux 90
4.2 Distribution de la pression à la surface des transducteurs 92
4.3 Etude de la tenue en tension pour 2 fréquences de résonance différentes 92
4.4 Influence des modes latéraux 93
5 Résultats 93
5.1 Etude de la tenue en tension des différents matériaux 93
5.2 Distribution de la pression à la surface des transducteurs 95
5.3 Etude de la tenue en tension pour 2 fréquences de résonance différentes 96
5.4 Influence des modes latéraux 97
6 Discussion 97
7 Conclusion 100

5
CHAPITRE 5 : ETUDE DE DIFFÉRENTES CONCEPTIONS DE TRANSDUCTEURS
102
1 Introduction 102
2 Le report des électrodes 103
2.1 Matériel et méthodes 104
2.2 Résultats et discussion 106
2.3 Conclusion 108
3 Amélioration de la tenue en tension des transducteurs 109
3.1 Les picots d'accrochage 109
3.2 Augmentation de la taille et de l'espacement des barreaux céramiques 112
3.3 Conclusion 113
4 Application à des maquettes de coupelles 114
4.1 Les coupelles 114
4.2 Etude de la tenue en vieillissement 117
4.3 Pression au point focal 119
4.4 Essais de fragmentation in vitro 120
4.5 Conclusion 120
5 Conclusion 121
CHAPITRE 6 : ETUDE D'EMPILEMENTS DE TRANSDUCTEURS 123
1 Introduction 123
2 Etude théorique d'empilements de transducteurs 124
2.1 Introduction 124
2.2 Cas de l'excitation du transducteur arrière 125
2.3 Cas de l'excitation du transducteur avant 129
2.4 Conclusion 131
3 Etudes préliminaires avec de la colle à l'argent 132
4 Etude d'empilements assemblés par collage classique 133
4.1 Matériel et méthodes 133
4.2 Résultats et discussion 134
5 Empilements assemblés par serrage 136
6
5.1 Matériel et méthodes 136
5.2 Résultats et discussion 137
6 Conclusion 138
CONCLUSION 139
RÉFÉRENCES 143
6
Introduction
La première fragmentation d'un calcul rénal chez l'homme par voie extra-corporelle, à
l'aide d'un générateur d'ondes de choc, est apparue au début des années 80 comme un progrès
considérable dans le traitement de cette affliction. Depuis lors, cette technique, appelée
lithotritie, s'est rapidement répandue jusqu'à devenir de nos jours le traitement de première
intention chez les patients porteurs de calculs rénaux ou urétéraux. De plus, depuis quelques
années, les applications médicales des ondes de choc s'étendent également au domaine de
l'orthopédie, pour le traitement de certains traumatismes articulaires.
De nombreuses techniques différentes ont été proposées pour la génération de l'onde
de choc. Cependant, seules les technologies électro-hydraulique, électromagnétique et piézo-
électrique restent utilisées. Chaque type de générateur d'ondes de choc dispose d'avantages et
d'inconvénients vis à vis de ses concurrents. Les générateurs piézo-électriques, constitués de
plusieurs centaines de transducteurs excités par décharge capacitive via un commutateur, sont
les moins efficaces du point de vue de la fragmentation. De plus, leurs dimensions sont
beaucoup plus élevées que celles des générateurs électromagnétiques et électro-hydrauliques,
de l'ordre de 500 mm contre 200 mm de diamètre. Les générateurs piézo-électriques
présentent néanmoins des avantages considérables : ils ne nécessitent qu'une légère
maintenance et des traitements sans anesthésie sont possibles. Par ailleurs, ce type de
générateur semble être le seul qui permette d'envisager divers développements futurs. Il a été
montré que la focalisation dynamique de l'onde est possible avec cette technologie, ce qui
permettrait de suivre en temps réel les déplacements du calcul dus aux mouvements
respiratoires. De plus, la capacité de contrôler, dans une certaine mesure, la forme de l'onde
de pression émise en fait un outil irremplaçable pour l'étude des phénomènes impliqués dans
7
la fragmentation du calcul. De tels travaux permettraient de déterminer une forme optimale
d'onde de pression qui pourrait alors être reproduite par les transducteurs piézo-électriques.
Cependant, les grandes dimensions des générateurs piézo-électriques en sont la
principale faiblesse, notamment dans le contexte actuel d'évolution des lithotriteurs qui
deviennent des machines de plus en plus compactes et modulaires. La faible pression de
surface qu'il est possible de générer à la surface des matériaux piézo-électriques employés
implique que la surface d'émission soit élevée, de manière à obtenir une énergie suffisante au
point focal pour une fragmentation satisfaisante du calcul. Ainsi, le développement d'un
générateur piézo-électrique compact à fort pouvoir de fragmentation passe par l'augmentation
de la pression générée à la surface du matériau. L'objectif de ce travail est d'améliorer la tenue
des transducteurs à la génération d'ondes de pression de fortes amplitudes en vue d'une telle
application.
Le premier chapitre détaille les avantages et les inconvénients des différentes
technologies de lithotriteurs, expose les techniques de mesure d'ondes de choc utilisées et
présente les caractéristiques de plusieurs générateurs piézo-électriques existant, notamment
les différents choix technologiques dont ils sont l'aboutissement. Des mesures du champ
acoustique émis par trois lithotriteurs électro-hydraulique, piézo-électrique et
électromagnétique commercialement disponibles, décrites dans le second chapitre, ont permis
de mieux situer la technologie piézo-électrique par rapport à ses concurrentes et de préciser
les objectifs à atteindre en termes de dimensions, de pression à la surface du matériau, de
fréquence de travail et d'uniformité de la répartition de pression. Il apparaît également que les
matériaux utilisés dans les machines aujourd'hui disponibles ne permettent pas d'augmenter la
pression générée. Cependant, un certain nombre de matériaux ont depuis été développés et
pourraient probablement permettre de générer une pression plus élevée. En particulier, il a été
montré que les matériaux piézo-composites pouvaient être utilisés pour la génération d'ondes

8
de choc. Une étude expérimentale de comparaison des performances de plusieurs matériaux
céramiques et composites dans une application à la génération d'ondes de pression de fortes
amplitude (chapitre 4) a permis de choisir un matériau prometteur pour le développement d'un
générateur d'ondes de choc de petites dimensions. De plus, l'observation de la rupture de ces
matériaux a mis en évidence plusieurs points faibles responsables de la destruction des
transducteurs. Auparavant, devant la complexité de la détermination des éléments du circuit
électrique de décharge correspondant à chacun des matériaux, un modèle des transducteurs
piézo-électriques a du être développé, permettant de prendre en compte la présence du
commutateur dont le comportement varie au cours du temps (chapitre 3). Enfin, différentes
conceptions de transducteurs ont été proposées dans le chapitre 5 pour améliorer leur tenue à
la génération d'ondes de pression de fortes amplitudes, en tenant compte des observations de
rupture. Ces conceptions ont alors été appliquées à des maquettes de coupelles qui ont permis
d'étudier la faisabilité d'un prototype satisfaisant aux objectifs fixés.
Par ailleurs, une solution alternative pour augmenter la pression générée à la surface
des transducteurs sans augmenter la tension d'excitation a été envisagée. Il s'agit d'empiler
deux transducteurs et de les exciter avec un intervalle de temps relatif tel que les ondes
générées par chaque couche interfèrent de manière constructive à l'interface entre le
transducteur et le milieu de propagation. Plusieurs conceptions différentes de tels
empilements ont été étudiées. Le chapitre 6 décrit les travaux réalisés dans ce domaine.

9
Chapitre 1 : Génération et détection des ondes de choc
1 La lithiase urinaire et la lithotritie
La maladie lithiasique, ou maladie de la pierre, se traduit par la formation
pathologique de concrétions à partir des sels drainés dans l'urine, la bile, la salive, les larmes
ou les aliments digérés. Ces calculs siègent essentiellement dans l'appareil urinaire ou la
vésicule, mais on les trouve également au niveau des articulations, des glandes salivaires, des
voies lacrymales ou encore dans l'intestin [1]. Dans le rein, les calculs sont généralement
situés dans le bassinet mais peuvent également occuper les calices. Le nombre de calculs, leur
forme, leur volume (de quelques dixièmes de millimètres à plusieurs centimètres de
diamètre), leur nature chimique [2] (oxalate de calcium dihydraté et monohydraté, phosphates
de calcium, cystine, struvite, acide urique) et leur siège [3] sont des paramètres extrêmement
variables selon les cas. Si le nombre et la taille des calculs sont faibles, ils peuvent être bien
tolérés dans le rein voire passer inaperçus. Cependant, si les concrétions sont plus
volumineuses ou nombreuses, elles exposent le patient à des complications graves pouvant
détruire la fonction rénale, par obstruction de la voie excrétrice associée ou non à l'infection
du haut appareil [4].
La lithiase urinaire est une pathologie qui s'est transformée avec le temps selon
l'évolution propre des sociétés humaines, en particulier des habitudes alimentaires et des
conditions de vie et d'hygiène [5]. En effet, bien que les calculs étaient essentiellement de
localisation vésicale en Europe jusqu'au XIXème siècle, ils se forment aujourd'hui
généralement dans le haut appareil urinaire, au niveau pyélique ou caliciel, et même
fréquemment au niveau de la papille rénale. La composition chimique des calculs a également

10
évolué : initialement faits de purines, ils sont aujourd'hui principalement constitués d'oxalate
de calcium. De nos jours, la lithiase urinaire touche 4 à 18 % de la population selon les études
et les pays, dans une tranche d'âge allant de 20 à 60 ans.
Les pierres de la vessie ont constitué au cours des siècles récents une des pathologies
les plus courantes chez l'homme. Bien qu'elles aient aujourd'hui pratiquement disparu, elles
ont été un moteur du développement de l'urologie et de la chirurgie en général. A partir du
milieu du XVIème siècle, une première solution thérapeutique, appelée lithotomie ou taille
vésicale, fût proposée pour les calculs de la vessie, les plus courants à l'époque. Cette
technique consiste à accéder au calcul par le périnée, voire également par la voie abdominale.
Néanmoins l'opération était risquée, puisque selon des rapports des hôpitaux de Londres
publiés au milieu du XIXème siècle, une opération sur sept se soldait par la mort du
patient [6]. En 1813, Gruithuisen proposa d'attraper le calcul au sein de la vessie à l'aide d'un
instrument introduit par l'urètre et permettant de percer des trous dans la pierre et de la
pulvériser. Dans les années qui suivirent, cette nouvelle thérapie, qui fût appelée lithotritie (du
grec lithos, la pierre, et tripsie, le broyage) se développa rapidement grâce à l'invention de
nouveaux instruments basés sur celui de Gruithuisen. En 1824, le premier traitement par
lithotritie fut réalisé en public à l'Académie Française, à Paris. Au cours des décades
suivantes, cette procédure, qui permettait d'éviter toute incision chirurgicale, remplaça la
lithothomie dans cinq cas sur six et permit d'abaisser la mortalité à 7 %.
Au cours du XIXème siècle, avec l'augmentation de l'incidence des calculs biliaires et
rénaux par rapport aux calculs vésicaux, et la naissance de la chirurgie moderne, la lithotomie
connut un regain d'intérêt. Mais les difficultés à enlever la pierre restant très importantes, en
particulier dans le rein, la lithotritie continuait parallèlement à se développer.
La solution proposée par la lithotritie est de détruire la pierre en fragments
suffisamment petits pour qu'ils puissent être spontanément évacués par les voies naturelles

11
(urètre, voies biliaires, etc.). De nouveaux outils permettant de broyer la pierre sont
apparus [7]. Un exemple de dispositif est une sonde urétrale à l'extrémité de laquelle est placé
un panier extracteur. Le calcul est d'abord saisi dans les brins du panier, puis, la gaine
contenant les brins étant métallique, il est finalement écrasé entre les brins et la gaine.
Néanmoins, le facteur limitant de cette technique reste la capture de la lithiase : les calculs
d'accès difficile, encastrés ou très volumineux ne peuvent être saisis dans le panier.
A partir des années 50, les premières sondes urétrales de contact permettant de
fragmenter les calculs par l'application de contraintes d'origine acoustique sont apparues.
Appelée lithotritie intracorporelle, cette technique utilise des ultrasons générés par une
céramique piézo-électrique basse fréquence (20 kHz) et amenés jusqu'au calcul par
l'intermédiaire d'un guide d'onde rigide [8], ou des ondes de choc générées par micro-
explosion chimique [9], laser [10] ou décharge électro-hydraulique [11]. A la même époque
s'est développée une nouvelle technique chirurgicale, la néphrolithotomie percutanée, qui
permet d'extraire par voie transcutanée le calcul de manière moins invasive que la chirurgie
classique. Si les deux techniques sont directement en concurrence, la lithotritie intracorporelle
permet néanmoins d'atteindre des calculs situés plus loin dans l'uretère. Cependant, des effets
thermiques importants peuvent être traumatisants pour les tissus environnant la pierre, ce qui
est une limite de la méthode.
La seconde guerre mondiale fut l'occasion d'une recherche importante sur la
génération et l'étude des ondes de choc, qui se poursuivit durant les décades suivantes. En vue
de l'utiliser pour des applications médicales, Rieber développe en 1951 le premier générateur
d'ondes de choc, basé sur la technologie électro-hydraulique [12]. En 1959, Eisenmenger
présente la première étude physique d'ondes de choc obtenues par un générateur
électromagnétique non focalisé [13]. Dès le début des années 70, l'application de ces ondes à
la destruction des calculs par voie extracorporelle est proposée. En 1971, Haeusler et Kiefer

12
réalisèrent la première fragmentation in vitro d'une lithiase, à distance [14], à l'aide d'un
générateur électro-hydraulique d'ondes de choc focalisées conçu par Dornier System. En
1980, Chaussy réalisa avec succès la première fragmentation d'un calcul chez l'homme, par
voie extracorporelle, au Département d'Urologie de l'Université de Munich [15]. Cette date
marque un pas décisif dans l'utilisation massive de cette technique par rapport aux techniques
précédentes [16]. Dans les années qui suivirent, les centres de lithotritie extracorporelle se
multiplièrent. De nouvelles machines furent développées, exploitant de nouveaux principes
physiques pour la génération de l'onde de choc. La technologie électromagnétique, conçue
dans les années 50, fut appliquée à la lithotritie [17]. Le premier générateur piézo-électrique
vit le jour en 1985 [18]. D'autres solutions furent proposées, comme le générateur à micro-
explosions chimiques [19] ou le générateur laser [20] dont les développements furent
rapidement interrompus en raison de difficultés techniques majeures.
De nos jours, la néphrolithotomie percutanée reste utilisée dans les cas de contre-
indications de la lithotritie extra-corporelle [21], comme un volume trop important du calcul à
détruire, une situation non favorable à l'élimination des fragments comme le calice inférieur,
l'obésité du patient ou encore une composition chimique résistante aux ondes de choc.
Néanmoins, la lithotritie extracorporelle est devenue le traitement de première intention pour
la plupart des patients porteurs de calculs rénaux ou urétéraux [22]. Ses atouts sont dus à son
caractère peu invasif, bien que des effets secondaires parfois importants aient été rapportés, en
particulier des lésions du parenchyme rénal [23, 24]. Massivement utilisés à l'heure actuelle,
les lithotriteurs, qui sont des machines encombrantes et à la maintenance coûteuse, méritent
d'être perfectionnés dans le but de réduire le coût du traitement, afin qu'un plus grand nombre
de patients puissent être traités de par le monde.
Dans cette optique, la technologie piézo-électrique est particulièrement digne d'intérêt,
car elle permet d'envisager un certain nombre de développements futurs, à la différence des

13
autres technologies. La focalisation dynamique des ondes de choc est, par exemple, possible
avec cette technologie. De plus, il est possible de contrôler la forme de l'onde émise, ce qui
présente un intérêt considérable dans l'étude des mécanismes responsables de la fragmentation
du calcul. La forme temporelle de l'onde acoustique pourrait alors être déterminée de manière
optimale en fonction de notre connaissance de ces phénomènes.
2 Les principaux lithotriteurs
2.1 Les générateurs d'ondes de choc
Le traitement par lithotritie extra-corporelle comprend toujours trois étapes :
• la localisation du calcul par rayon X ou repérage échographique [25],
• la mise en coïncidence du calcul et du point focal du générateur d'ondes acoustiques,
• la destruction du calcul par génération d'ondes de choc.
Une onde de choc est définie comme une augmentation brutale de la pression, avec un
temps de montée très court (de l'ordre de 100 ns) et un retour à la normale selon une
décroissance exponentielle. La durée totale de l'impulsion est de l'ordre de la microseconde.
Deux types de générateurs d'ondes de choc sont communément distingués :
• les générateurs à sources ponctuelles émettent à partir d'un point d'origine une onde de
choc sphérique qui est ensuite focalisée par réflexion sur la surface d'une ellipsoïde,
• les générateurs à sources étendues émettent à partir d'une surface une onde ultrasonore
de forte amplitude, plus précisément une variation sinusoïdale amortie de la pression avec
une pseudo-fréquence élevée. Ces ondes sont ensuite focalisées, soit de manière naturelle
si la surface émettrice est une portion de sphère, soit par l'utilisation d'une lentille

14
acoustique ou d'une paraboloïde de réflexion. Ce n'est qu'au cours de la propagation de
l'onde dans un milieu non linéaire tel que l'eau ou les tissus qu'elle se transforme peu à peu
en onde de choc, d'autant plus rapidement que l'amplitude et la fréquence de l'onde
initialement émise est élevée.
La figure I-1 illustre le principe des principaux générateurs d'ondes de choc, qui seront
détaillés plus loin.
Zone focale
Décharge électrique
Semi-ellipso ïde de réflexion
(a)
Matrice sphérique d'éléments piézo -électriques
Zone focale (c)
Lentille acoustique
Zone focaleMembraneBobine
(b)
Figure I-1 : Principe des générateurs électro-
hydrauliques (a), électromagnétiques (b) et piézo-
électriques (c).
2.2 Le générateur électro-hydraulique
Ce type de générateur utilise une source ponctuelle. Entre deux électrodes placées
dans de l'eau (figure I-1a), une décharge électrique violente donne naissance à une bulle de
vapeur [26, 27, 28]. La grande vitesse de dilatation de cette bulle crée une onde de choc
sphérique. L'espace inter-électrodes étant placé au premier foyer d'une semi-ellipsoïde de
réflexion, l'onde de choc générée est partiellement réfléchie et focalisée au second foyer du

15
réflecteur. L'énergie électrique est fournie par un condensateur d'une capacité généralement
proche de 0.1 µF régulièrement rechargée par une alimentation haute tension entre 12 et 20
kV. La commutation est réalisée par un éclateur à gaz.
La transmission de l'onde de choc entre le générateur et le patient se fait dans un
milieu de couplage constitué d'eau dégazée, ce qui est valable également pour les autres types
de générateurs, afin d'éviter la formation de bulles qui absorbent et diffusent une partie
importante de l'onde. L'eau est maintenue dans une poche en silicone. La pression obtenue au
point focal a une amplitude de l'ordre de plusieurs dizaines de MPa.
Dans l'eau dégazée, la formation du plasma est un phénomène non reproductible
impliquant des variations très importantes de l'impulsion de pression. Il existe un temps de
latence aléatoire entre la fermeture du commutateur et l'apparition de l'arc électrique. Par
ailleurs, le passage du courant entre les deux électrodes ne se fait pas sur toute la surface mais
entre deux points dont la position est aléatoire. Enfin, la faible résistance du plasma donne à la
décharge du courant une forme hautement oscillatoire, ce qui témoigne du caractère non
optimal du transfert de l'énergie électrique en énergie mécanique.
L'ajout d'électrolytes dans l'eau, en la rendant faiblement conductrice, permet
d'accroître considérablement les performances des lithotriteurs électro-hydrauliques [29].
Pour une conductivité de 7.8 Ω.cm, il n'y a plus de latence et la décharge du courant est
amortie. La pression générée augmente de 10 % et la pression au point focal de 50 %. La
tache focale est réduite, puisque la déviation standard relative de pression au point focal est de
5 % alors qu'elle est de 30 % dans l'eau dégazée [30]. Les observations réalisées par Cathignol
montrent la position aléatoire de l'arc dans l'eau ordinaire comparativement aux lignes de
conduction qui apparaissent toujours au même endroit dans l'électrolyte [31]. La
reproductibilité de la génération de l'onde est donc considérablement améliorée puisque l'arc
apparaît toujours exactement au premier foyer de l'ellipsoïde. Par ailleurs, la décharge
16
s'effectuant par une infinité de lignes de courant réparties sur toute la section des électrodes, la
densité de courant est plus faible et l'élévation locale de la température des électrodes est
réduite. Leur usure étant liée à des effets thermiques, la vaporisation de métal est fortement
atténuée dans l'électrolyte, ce qui réduit le phénomène d'érosion des électrodes d'un facteur 8
dans les mêmes conditions de charge du condensateur. Une fragmentation totale est obtenue
en 220 chocs au lieu de 450 dans l'eau dégazée pour des pierres standards. Enfin, la
conductivité constante dans l'électrolyte a permis l'utilisation d'une ligne de transmission
adaptée pour réduire la durée du front de montée et éloigner le générateur d'onde de choc du
circuit électrique de décharge. Ainsi, le Sonolith Praktis, lithotriteur compact commercialisé
par EDAP-Technomed, a pu être conçu dans un souci d'ergonomie sans précédent. Le
Sonolith 4000 bénéficie également de ces améliorations. Cette technologie est appelée
"électro-conductive".
2.3 Le générateur électromagnétique
Ce générateur utilise une source étendue constituée par une membrane métallique. Le
principe est celui du haut-parleur (figure I-1b). Une capacité chargée entre 16 et 22 kV est
brutalement déchargée à travers une bobine électromagnétique en moins de 5 µs. Le courant à
l'intérieur de la bobine induit un champ magnétique intense qui repousse la membrane
métallique située en regard. Le déplacement de la membrane crée une onde de pression qui,
en se propageant à l'intérieur d'un cylindre, se transforme en onde de choc. La focalisation est
ensuite obtenue à l'aide d'une lentille acoustique [17]. La firme Siemens commercialise des
générateurs basés sur ce principe (Modularis et Lithostar).

17
Il existe également une variante dans laquelle la membrane est cylindrique. L'onde de
pression est générée de manière radiale et focalisée par réflexion sur la surface d'une semi-
paraboloïde [32]. Ce principe est utilisé par la firme Storz Medical [33] avec le Modulith.
2.4 Le générateur piézo-électrique
Ce générateur, également à source étendue, utilise de petits éléments piézo-électriques,
dont la particularité est de se déformer sous l'action d'un champ électrique. Ces transducteurs
sont disposés sur la face interne d'un segment de sphère. Lorsqu'on les soumet à une décharge
électrique, ils se dilatent brusquement puis reviennent à leur état initial après un certain
nombre d'oscillations. L'onde acoustique ainsi générée se focalise naturellement au centre de
la sphère. Des exemples de ce type de générateurs, qui nous intéresse particulièrement, seront
détaillés dans le § 3.
2.5 Avantages et inconvénients des différentes technologies de générateurs
Dans le cas de la chirurgie, le critère de réussite de la thérapie est l'élimination de tout
calcul au niveau des voies urinaires et la préservation de la fonction rénale. Il est plus mal aisé
de donner un critère de réussite fiable dans le cas de la lithotritie extracorporelle. En effet,
cette technique n'élimine pas les calculs à proprement parler mais elle les fragmente afin de
permettre leur évacuation par les voies urinaires. Cette élimination n'étant pas toujours
complète ni immédiate, on observe généralement au bout de quelques jours la persistance de
fragments lithiasiques. En général, en fonction de la taille et de la composition chimique de
ces fragments, les auteurs d'études cliniques estiment soit qu'ils seront spontanément éliminés

18
de l'organisme, et concluent à un succès thérapeutique, soit qu'ils persisteront et concluent
alors à un échec du traitement. Or, il n'existe actuellement aucun consensus concernant la
taille des fragments résiduels dont on suppose qu'ils seront éliminés. Celle-ci varie entre 1 et 5
mm selon les auteurs. Aucune étude, à l'heure actuelle, ne permet de prédire à partir de quelle
taille et quelle durée après le traitement les fragments résiduels seront éliminés [34]. C'est la
raison pour laquelle il est admis que les excellents résultats publiés par Chaussy après les
premiers essais cliniques de lithotritie extra-corporelle étaient quelque peu surestimés par une
définition trop favorable des critères de réussite.
Quels que soient les critères choisis, les études cliniques montrent généralement que
les générateurs d'ondes de choc commercialement disponibles, qu'ils soient piézo-électriques,
électromagnétiques ou électro-hydrauliques, permettent tous d'obtenir des résultats cliniques
très similaires entre eux [35]. Néanmoins, à l'usage, les praticiens estiment que la technologie
utilisée a une influence sur la façon dont le calcul est fragmenté. Les générateurs électro-
hydrauliques et électromagnétiques [36] sont appréciés pour leur très bon pouvoir de
fragmentation. En conditions normales, un calcul est cassé en 2500-3500 tirs en moyenne
avec ce type de machines. On observe avec les générateurs électro-hydrauliques, et dans une
moindre mesure avec les générateurs électromagnétiques, une fragmentation très rapide en
début de traitement. En quelques tirs, la pierre est décomposée en plusieurs fragments qui
ensuite se cassent à leur tour. Dans le cas du générateur piézo-électrique, la fragmentation
d'un calcul nécessite beaucoup plus de tirs, 10000 en moyenne. De plus, chaque tir enlève une
quantité très faible de matière : la pierre est fragmentée en particules plus fine [37, 38]. Par
ailleurs, la douleur ressentie par le patient, et donc la nécessité de pratiquer ou non une
anesthésie, dépend en partie du type de générateur employé. Les générateurs piézo-électriques
sont réputés pour leur capacité à délivrer des traitements ne nécessitant pas ou peu
d'anesthésie [39, 40]. Les générateurs électro-hydrauliques sont bien plus douloureux. Le
19
traitement nécessite toujours une anesthésie, bien que l'augmentation de l'ouverture des
générateurs ait considérablement amélioré ce point [41].
Il serait d'un grand secours, pour les concepteurs de lithotriteurs, de disposer de
suffisamment de mesures acoustiques réalisées sur des générateurs commerciaux, dont les
performances sont connues, pour espérer relier ces observations plus ou moins objectives à
l'aspect physique de l'onde émise. Quantifier les performances des machines dans les
domaines cités serait alors possible, ainsi que la détermination des facteurs intervenant.
Malheureusement, les données constructeurs ne permettent pas de comparer les machines
entre elles, car les protocoles expérimentaux et le matériel utilisé sont différents pour chaque
machine. Or, les mesures d'ondes de choc, qui sont des signaux à très large bande, sont
fortement dépendantes de l'hydrophone utilisé [42]. De plus, il existe peu d'études
expérimentales comparatives basées sur des mesures du champ acoustique émis par différents
lithotriteurs commerciaux.
Coleman et Saunders [43, 44], et Buizza et coll. [45], sont à notre connaissance les
seuls à avoir publié de tels travaux. Relativement anciennes (1987, 1989 et 1995), ces études
n'intègrent évidemment pas les machines qui ont été commercialisées durant ces sept
dernières années, mais permettent néanmoins d'associer, dans une certaine mesure, les
performances des lithotriteurs étudiés et les formes d'onde générées.
Pour chaque générateur étudié, l'évolution de la pression au point focal a été mesurée,
ainsi que les dimensions de la tache focale à –6 dB. La comparaison entre les différents
lithotriteurs est basée sur l'étude des paramètres suivants :
• la pression maximale (P+) et minimale (P-) au point focal, ainsi que la déviation standard
caractérisant la reproductibilité des tirs,
• le temps de montée et la durée totale de l'impulsion,
• les dimensions de la tache focale,

20
• l'intensité acoustique, calculée sur une période de répétition (Ispta) et sur la durée de
l'impulsion (Isppa),
• l'énergie acoustique dans le volume focal,
• le gain d'antenne, calculé comme le rapport du diamètre du faisceau au niveau du
générateur et du diamètre focal, à –6 dB.
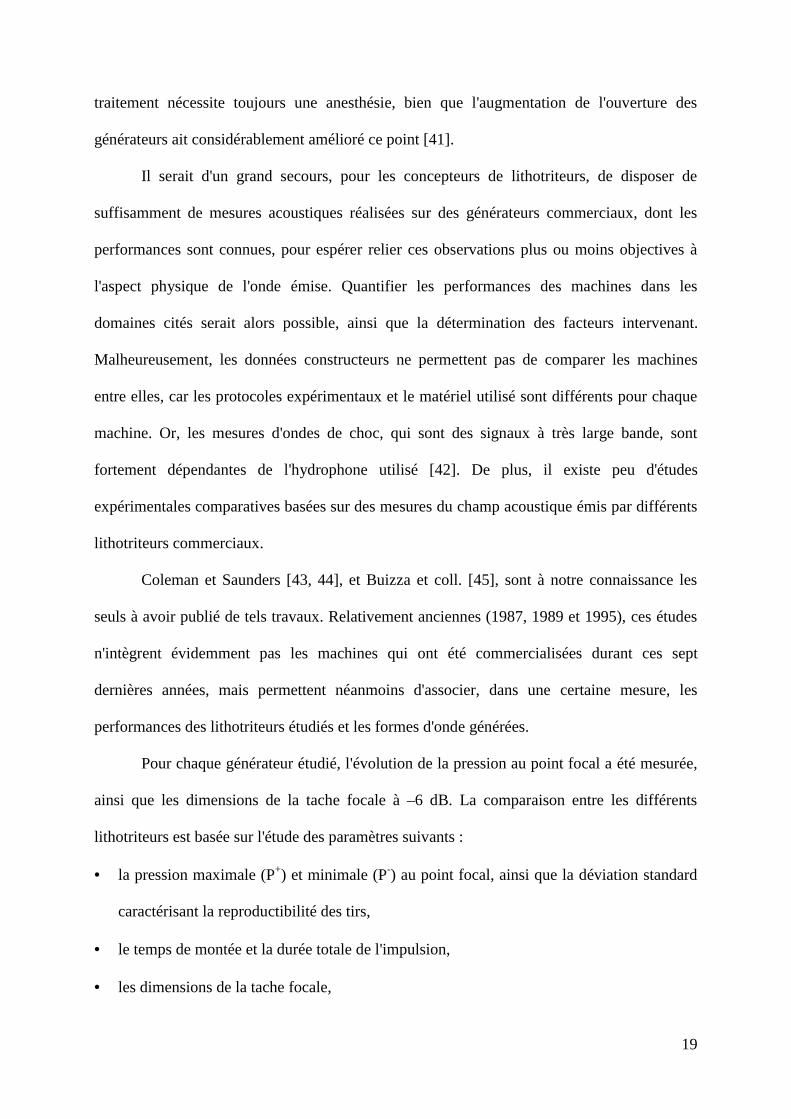
La figure I-2 [44] donne les formes d'ondes de pression normalisées au point focal
pour un générateur électro-hydraulique, piézo-électrique, électromagnétique et électro-
conductif. L'écart temporel entre deux points est de 20 nanosecondes et l'axe des abscisses est
gradué en microsecondes. Les formes de pression sont toutes des sinusoïdes amorties mais
diffèrent au niveau de la durée de l'impulsion et de la quantité d'oscillations. La figure I-3 [44]
donne les répartitions de pression normalisées selon l'axe de propagation pour les quatre types
de générateurs. Le point d'abscisse 0 est le point focal. Le sens de la propagation est de
gauche à droite sur toutes les courbes.
Les données concernant le générateur électro-conductif proviennent d'un document
interne à la société EDAP-Technomed (TMS 507 709 A).
0
0 .1
0 .20 .3
0 .4
0 .5
0 .6
0 .7
0 .80 .91 .0
-0 .1
0 2 4 6 8
Figure I-2 : Pressions typiques norm
focal d'un générateur électro-hydrau
électrique (b), électromagnétique
conductif (d).
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
1.1
RE
LAT
IVE
PR
ES
SU
RE
d
1 0
alisées au point
lique (a), piézo-
(c) et électro-
0
0.1
-10 -5 0 5 10 15 20
DISTANCE (MM)
Figure I-3 : Distribution de pression norma
l'axe de propagation pour un générateu
hydraulique (a), piézo-électrique (
électromagnétique (c) et électro-condu
d
21
25
lisée selon
r électro-
b),
ctif (d).
22
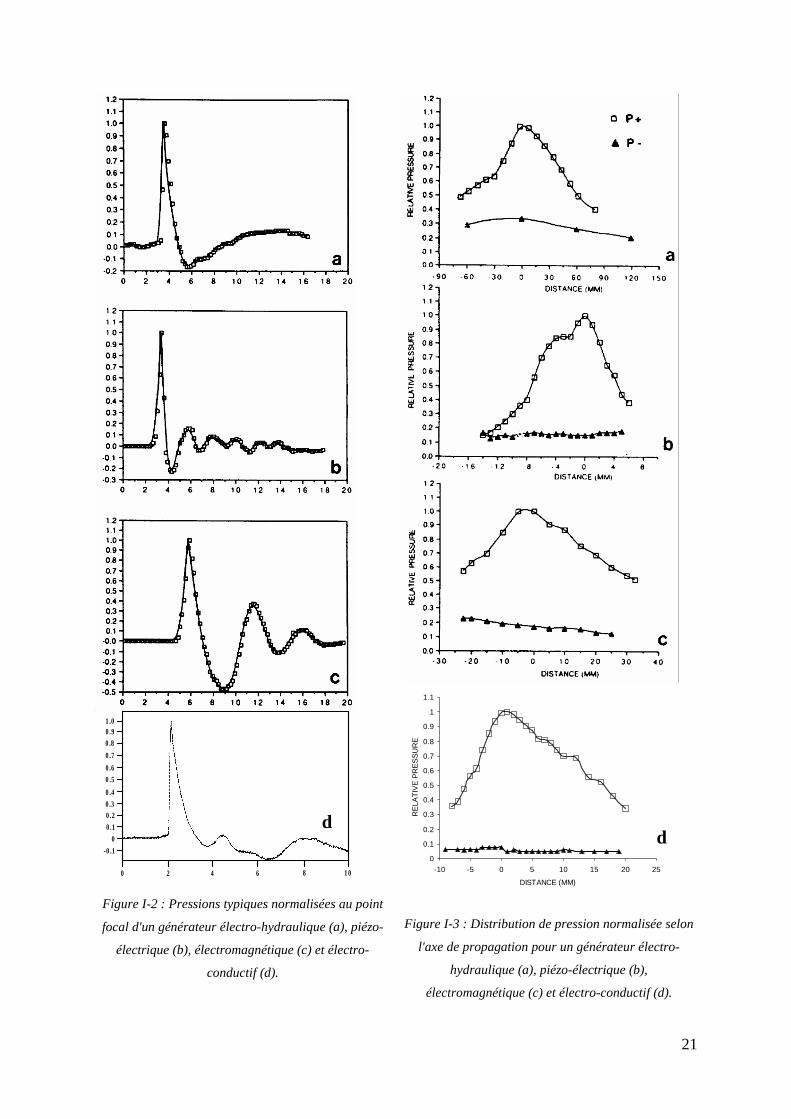
Les conclusions générales qui peuvent être tirées de ces études sont les suivantes :
• Les formes temporelles de la pression présentent des alternances négatives, sources de
cavitation, plus amples ou plus longues dans le cas des générateurs électro-hydrauliques et
électromagnétiques que piézo-électriques. Ces alternances négatives sont les plus faibles
pour le générateur électro-conductif.
• La pression maximale (P+) varie de 20 à 115 MPa environ. Les valeurs de P+ les plus
élevées sont obtenues avec les générateurs piézo-électriques, puis viennent les générateurs
électro-hydrauliques et électromagnétiques qui sont assez équivalents pour ce paramètre.
• La durée de l'impulsion varie en sens inverse : elle est très petite pour les générateurs
piézo-électriques et plus grande pour les générateurs électromagnétiques.
• La pression minimale (P-) varie de 3 à 10 MPa environ mais l'influence du type de
générateur n'est pas importante.
• L'aire focale varie de 3 à 400 mm2 environ. Les valeurs les plus importantes sont atteintes
par les générateurs électro-hydrauliques, puis par les générateurs électromagnétiques et
enfin piézo-électriques. Sachant qu'un calcul d'1 cm de diamètre a une section d'aire égale
à 80 mm2, il sera entièrement englobé dans le volume focal d'un générateur électro-
hydraulique, mais pas dans celui d'un générateur piézo-électrique. Cependant,
l'inconvénient d'une grande aire focale est, dans le cas des calculs de faible volume,
d'exposer les tissus à des pressions élevées, créant inutilement des dommages. Le
générateur électro-conductif présente une aire focale réduite par rapport au générateur
électro-hydraulique.
• L'énergie dans le volume focal est la plus importante pour les générateurs électro-
hydrauliques, puis viennent les générateurs électromagnétiques et enfin piézo-électriques.
• La reproductibilité des tirs est la moins bonne pour les générateurs électro-hydrauliques.
Elle est excellente pour les générateurs piézo-électriques et électro-conductifs.

23
• L'onde de pression au point focal est fortement choquée pour les générateurs électro-
hydrauliques. Pour les générateurs électromagnétiques, elle ne l'est qu'à forte puissance de
fonctionnement.
• Les auteurs se servent du gain d'antenne pour calculer la pression au niveau de la peau,
qu'ils supposent directement liée à la douleur. Les pressions les plus faibles au niveau de
la peau sont calculées pour les générateurs piézo-électriques, puis viennent les générateurs
électromagnétiques et enfin électro-hydrauliques. Ce point est en accord avec
l'observation clinique : les générateurs piézo-électriques permettent d'effectuer des
traitements sans anesthésie, les électromagnétiques nécessitent souvent une anesthésie
locale, tandis que les électro-hydrauliques nécessitent une anesthésie générale.
Néanmoins, aucune étude n'a à ce jour montré que la valeur de la pression au niveau de la
peau était le seul paramètre représentatif de la douleur. Il est probable que la répartition de
la pression au niveau de la peau soit également un facteur important. Certains auteurs
pensent que la cavitation joue également un rôle considérable [39]. En effet, avec le
générateur piézo-électrique EDAP LT-01 qui a été conçu pour atteindre des fréquences de
répétition des tirs (fr) de 160 Hz, les praticiens ont observés que si fr est supérieur à 20 Hz,
la douleur devient très importante. De plus, Coleman a montré que la pression mesurée au
point focal diminue en amplitude lorsque fr devient supérieur à 20 Hz. Ces observations
évoquent un phénomène de cavitation qui bloquerait le passage de l'onde et serait
responsable de la sensation de douleur [39].
Néanmoins, toutes ces études concluent sur la difficulté de relier ces mesures au
pouvoir de fragmentation des machines. La pression maximale et le temps de montée ne sont
généralement pas corrélés avec la fragmentation. L'énergie acoustique dans le volume focal
semble être un meilleur critère du pouvoir de fragmentation des lithotriteurs. Cependant,
seules quelques études très succintes se sont à ce jour penchées sur le sujet [46, 47].

24
3 Les générateurs piézo-électriques
Seules deux entreprises commercialisent des lithotriteurs piézo-électriques : la société
EDAP-Technomed à Vaulx-en-Velin, avec le LT-01 et le LT-02, et la société Richard Wolf
GmbH basée à Knittlingen, en Allemagne, avec les gammes Piezolith et Piezoson. Cette
partie a pour but de présenter succinctement le générateur LT-02 d'EDAP-Technomed et le
Piezolith 2501 de Richard Wolf afin de détailler les choix technologiques effectués par
chacun. L'unité 281 de l'INSERM, à Lyon, a pour sa part développé un générateur piézo-
électrique qui sera également présenté en raison de son originalité.
Cette présentation se limitera aux générateurs d'ondes de choc de ces lithotriteurs.
3.1 Le LT-02
La société EDAP commercialisa en 1985 le LT-01, le premier lithotriteur piézo-
électrique. Le LT-02 (figure I-4), conçu en 1992, est d'une conception similaire [48], bien que
les choix technologiques réalisés soient très différents, y compris en ce qui concerne le
générateur d'ondes de choc.

25
Figure I-4 : Le lithotriteur EDAP-Technomed LT-02.
La tête de tir du LT-02, montrée figure I-5, se présente comme une coupole de 51
centimètres de diamètre, sur laquelle sont disposés 105 transducteurs piézo-électriques
disposés sur 3 cercles concentriques. La disposition sphérique des transducteurs permet une
focalisation naturelle des ondes émises. Au centre de la coupole, une ouverture a été pratiquée
afin de permettre le passage d'une sonde échographique en ligne avec la tête de tir.
Figure I-5 : Tête de tir du LT-02. Figure I-6 : Transducteur élémentaire du LT-02.

26
Les transducteurs élémentaires (figure I-6) sont circulaires et électriquement
indépendants. Ils sont constitués d'un boîtier isolant dans lequel est placée une pastille en
céramique piézo-électrique ayant une fréquence de résonance de 400 kHz et un diamètre
d'environ 40 millimètres. Les transducteurs comportent également un milieu arrière limitant
les alternances négatives de la pression émise et une lame d'adaptation. Ces deux lames
permettent également d'isoler électriquement la céramique et de la protéger. A l'arrière des
transducteurs, une tige filetée permet la fixation sur la coupole et constitue une des connexion
électrique de la céramique. La seconde est assurée par un fil métallique sortant également du
boîtier par l'arrière.
Ce principe permet un montage relativement simple de la tête de tir, puisqu'il suffit de
visser les transducteurs. De plus, lorsqu'un transducteur est défectueux, il est possible de le
remplacer. Par contre, le choix de transducteurs circulaires ne permet pas d'optimiser la
surface d'émission. Quelle que soit la disposition choisie sur la coupole, une partie importante
de sa surface n'est pas émettrice.
Le rayon de courbure de la coupole est d'environ 33 centimètres et l'angle d'ouverture
de 38°. Rappelons que l'angle d'ouverture d'un générateur focalisé est la moitié de l'angle
constitué par le faisceau d'ondes acoustiques au point focal.
3.2 Le Piezolith 2501
La tête de tir du Piezolith 2501 est constituée d'une coupole en aluminium d'un
diamètre de 50 centimètres. Sur cette coupelle, environ 3000 petits plots cylindriques en
céramique piézo-électrique de 5 millimètres de diamètre et de 5 millimètres de hauteur sont
disposés sur toute la surface avec un espacement de 1 à 2 millimètres, comme le montre la
figure I-7 [49-51]. La coupole en aluminium joue le rôle de milieu arrière pour les plots piézo-

27
électrique et assure également une des connexion électrique, les plots étant fixés à l'aide d'une
colle conductrice. La seconde électrode est une grille métallique posée et soudée sur l'autre
face des plots piézo-électriques. Enfin, une résine époxyde est coulée sur l'ensemble de la
coupole, afin d'isoler électriquement les plots entre eux, de réaliser une lame d'adaptation
acoustique et de protéger l'ensemble. Le transducteur ainsi constitué résonne à une fréquence
d'environ 400 kHz.
Figure I-7 : Disposition des barreaux piézo-électriques sur la tête de tir du Piezolith [51].
Le choix de barreaux piézo-électriques permet d'obtenir un très bon taux de
remplissage de la surface de la coupole, c'est-à-dire qu'une grande partie de la surface de la
coupole est émettrice. Par contre, cette configuration en barreaux favorise le mode radial des
transducteurs. Ceci a pour conséquence une mauvaise homogénéité de la pression émise à la
surface de la coupole.
Le rayon de courbure de la coupole est de 35 centimètres et l'angle d'ouverture de 45°.

28
3.3 Le générateur 274 éléments de l'INSERM
Il est connu que la respiration du patient peut faire bouger le calcul avec une amplitude
pouvant atteindre 2 centimètres de part et d'autre de la position de repos. Au cours d'un
traitement, la pierre n'est donc pas toujours au point focal de la tête de tir, ce qui a pour effet
d'augmenter la durée de l'intervention d'un facteur 2 ou 3 et d'exposer les tissus environnant le
calcul à des ondes de choc qui les endommagent. Dans le but de résoudre ce problème,
l'INSERM a développé un générateur piézo-électrique d'ondes de choc doté d'une focalisation
dynamique [52, 53]. Grâce à ce générateur, il est possible de déplacer le point de focalisation
des ondes de manière instantanée. Il fut envisagé de coupler ce générateur à un système de
localisation en temps réel par miroir à retournement temporel [54, 55], ce qui aurait permis, à
chaque tir, d'ajuster automatiquement la position du point focal sur la position réelle du calcul.
Pour qu'une focalisation dynamique des ondes soit possible, il est nécessaire que la
coupole soit constituée d'un grand nombre de transducteurs électriquement indépendants entre
eux. En effet, comme dans le cas de la focalisation dynamique basse puissance, c'est en
ajustant le retard de déclenchement de chaque transducteur qu'on peut déplacer le point de
focalisation réel. Chaque transducteur possède donc son propre système d'excitation qui est
pourvu d'une ligne à retard programmable. En fonction de la position désirée du point de
focalisation, le retard de chaque transducteur est calculé et programmé dans la mémoire de
son système d'excitation. La réalisation d'une coupole sphérique composée d'un grand nombre
de transducteurs élémentaires en matériau piézo-électrique conventionnel tel que le PZT est
difficile en raison, d'une part, des problèmes mécaniques rencontrés pour disposer l'ensemble
de ces transducteurs sur la coupole, et d'autre part, des modes de résonance parasites et de
couplage inter-élements qui sont importants pour ces matériaux. C'est pourquoi il a semblé
avantageux d'utiliser un matériau piézo-électrique composite. Ce type de matériau peut

29
facilement être formé et ne vibre quasiment qu'en mode piston, éliminant de ce fait les modes
parasites et de couplage inter-éléments. L'absence de tels modes de vibration permet
également de supprimer la découpe physique des transducteurs. En effet, dans ce cas, une
disposition adéquate des électrodes à la surface du matériau permet seule d'obtenir un
ensemble de transducteurs électriquement et mécaniquement indépendants entre eux.
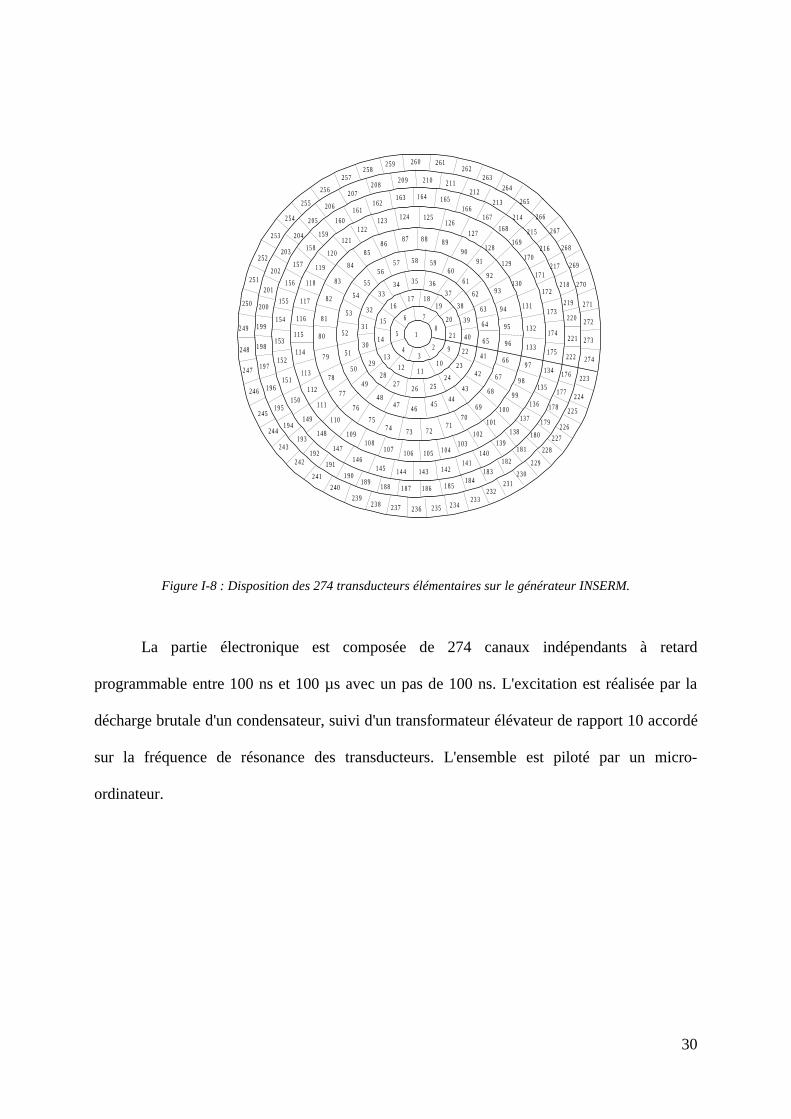
La coupole INSERM, d'un diamètre de 280 millimètres, est constituée de 274
transducteurs élémentaires en matériau composite répartis sur 10 anneaux concentriques et
résonant à une fréquence de 360 kHz. Le point de focalisation géométrique de cette coupole
se situe à 190 millimètres de sa surface. En modifiant le retard de déclenchement de chaque
transducteur, le point de focalisation réel peut être déplacé autour de la position naturelle
déterminée par la géométrie de la coupole. La figure I-8 montre la disposition des
transducteurs élémentaires sur la coupole. Pour que tous les systèmes d'excitation électrique
soient identiques, les éléments piézo-électriques sont tous de surface égale. Afin de maximiser
la surface émettrice de la coupole, les transducteurs ont une forme de secteur angulaire. Ils
sont espacés de 1.5 millimètres les uns des autres pour éviter des amorçages électriques entre
deux éléments adjacents. En effet, ce risque est particulièrement important étant donnés que
les transducteurs ne sont pas tous excités en même temps. Seul le transducteur n° 1, situé au
centre de la coupole, a une forme circulaire. Une lame quart d'onde d'une impédance
acoustique de 3.4 MRayl permet d'adapter mécaniquement les transducteurs au milieu de
propagation et de les protéger. L'impédance du milieu arrière, de 0.5 MRayl, a été choisie très
basse afin d'augmenter au maximum le rendement électromécanique des transducteurs. Les
électrodes en cuivre sont obtenues par métallisation sur le substrat et recouvertes d'une fine
couche d'argent.
30
1
23
4
5
6 7
8
9
1 01 11 2
1 3
1 4
15
161 7 1 8
1 9
20
2 1
22
23
2 4252 6
2 728
2 9
30
3 1
3 2
3 33 4 3 5 36
3 7
38
3 9
4 0
41
4 2
4344
4 5464 7
4 8
4 9
5 0
5 1
5 2
5 3
5 4
5 5
5 65 7 5 8 59
6 06 1
6 2
63
6 4
6 5
66
6 7
6 8
6970
717 2737 4
7 5
7 6
7 7
78
7 9
8 0
8 1
82
83
84
8 58 6
87 8 8 8 990
91
9 2
9 3
9 4
95
9 6
9 7
9 8
9 9
1 0 0
101
1 02103
1 041051 0610710 8
109
110
111
112
11 3
114
115
116
117
11 8
11 9
12 0
121
1 22123 124 125
1 26127
1 2 8
1 29
130
1 3 1
132
133
134
135
13 6
13 7
138
139140
14 11 4214314 41 45
1 46
147
148
149
150
151
152
153
1 54
15 5
1 56
157
15 8
159
1601 61
162163 1 64 165
16 61 67
168
169
170
171
172
173
17 4
175
17 6
177
178
1 79
180
181
1 82183
1841851 8618 71 88
189190
191
192
19 3
194
19 5
196
19 7
198
199
200
201
2 02
203
204
2 05
20 6
2 072 0 8
209 2 10 2 11212
213
2 1 4
2 1 5
216
2 17
2 18
2 19
22 0
221
22 2
223
224
225
2 26
227
228
2 29
23023 1
23223 3
2 342 352362372 3 8239
240
241
2 42
24 3
244
245
246
2 4 7
248
2 49
250
251
252
2 53
2 54
25 5
25 6
257258
2 59 26 0 26126 2
2 63264
26 5
2 66
2 67
26 8
269
270
2 71
272
273
274
Figure I-8 : Disposition des 274 transducteurs élémentaires sur le générateur INSERM.
La partie électronique est composée de 274 canaux indépendants à retard
programmable entre 100 ns et 100 µs avec un pas de 100 ns. L'excitation est réalisée par la
décharge brutale d'un condensateur, suivi d'un transformateur élévateur de rapport 10 accordé
sur la fréquence de résonance des transducteurs. L'ensemble est piloté par un micro-
ordinateur.

31
4 Les hydrophones
Les critères de performance d'un hydrophone ultrasonore sont :
• la sensibilité, qui caractérise son aptitude à convertir l'énergie mécanique en énergie
électrique. Elle doit être suffisante pour produire un niveau de signal acceptable, constante
sur les gammes de fréquences et de pressions rencontrées et constante sur une période
relativement longue.
• les dimensions de la partie sensible, qui déterminent la réponse angulaire du capteur. Plus
cette dimension est faible, plus le capteur est omnidirectionnel. Une règle communément
admise est que le diamètre de la surface active doit être inférieur à la longueur d'onde.
• l'immunité aux parasites, qui se réalise par un blindage correct du capteur,
• l'absence de déformation du champ acoustique durant la mesure, en évitant les réflexions
de l'onde incidente sur le capteur,
• la robustesse.
En pratique, il n'est pas possible de fabriquer un hydrophone réunissant l'ensemble de
ces critères et un compromis doit toujours être accepté. En général, la taille de l'élément actif
est du même ordre de grandeur pour tous les hydrophones mais elle n'est pas inférieure à la
longueur d'onde. Ceux-ci sont donc très directionnels, ce qui implique un alignement parfait
dans le champ acoustique. La diminution de la taille de l'élément actif pose des problèmes
importants de conception et réduit considérablement la sensibilité du capteur. D'autre part, il
est souvent difficile d'éliminer toutes les résonances parasites, qu'elles soient acoustiques ou
électriques, ce qui rend impossible l'obtention d'une réponse parfaitement plate en fréquence.
32
4.1 Les hydrophones PZT
En général, un hydrophone PZT se présente sous la forme d'une aiguille à l'extrémité
de laquelle est collé un petit disque en céramique piézo-électrique (PZT). L'aiguille joue le
rôle de matériau absorbant les ondes arrières. En raison de résonances parasites de type radial
dans la céramique et des réflexions dans le matériaux absorbant, les réponses fréquentielle et
angulaire ne sont pas plates. Par ailleurs, ce type d'hydrophone n'est pas très stable dans le
temps et dans une forte dynamique de pression. Néanmoins, ces capteurs sont appréciés pour
leur robustesse, leur faible coût, et conviennent très bien à la mesure de signaux harmoniques.
4.2 Les hydrophones PVDF
Le fluoride de polyvinylidène (PVDF), matériau polymère dont la piézo-électricité fut
découverte en 1969 [56], a permis le développement d'éléments actifs de très faible épaisseur,
de l'ordre de quelques dizaines de microns [57] ce qui les rend beaucoup plus large bande que
les hydrophones PZT. Un second avantage, par rapport aux PZT, est que l'impédance
acoustique du PVDF est plus proche de celle de l'eau, ce qui favorise le transfert de l'onde
incidente dans l'élément actif et réduit les réflexions sur le capteur qui peuvent interférer avec
le champ acoustique mesuré. Par ailleurs, la sensibilité des hydrophones PVDF est plus
constante dans le temps. Les hydrophones PVDF classiques sont de deux types : les
hydrophones aiguilles et les hydrophones à membrane.
Pour les hydrophones de type aiguille, l'élément actif est collé à l'extrémité d'un tube
aux parois fines et d'un diamètre d'environ 1 millimètre. Les résonances et réflexions parasites
sont plus faibles que dans le cas du PZT, mais la sensibilité évolue rapidement pour des

33
fréquences faibles. En dessous d'1 MHz, des problèmes de diffraction à l'extrémité de
l'aiguille réduisent également la sensibilité.
Les hydrophones à membrane sont de deux types : coplanaires ou bilaminaires. Les
hydrophones de type coplanaires sont constitués d'une fine feuille de PVDF non polarisée
tendue sur un anneau. Des électrodes en chrome-or ou platine-or sont déposées par
vaporisation sous vide sur les deux faces de la feuille. Ces électrodes ne se recouvrent que sur
une faible surface au centre de la membrane qui forme, après polarisation, l'élément actif. En
général, le diamètre de l'élément actif est compris entre 0.5 et 1 millimètre. Un blindage relié
à la terre entoure l'élément actif. La figure I-9 donne une représentation d'un hydrophone
PVDF à membrane coplanaire.
Anneau
membrane PVDFMasse
Elément actif
Câble coaxial
Figure I-9 : Hydrophone PVDF à membrane.
La technologie bilaminaire consiste en deux films PVDF collées l'une sur l'autre. Une
électrode est préalablement déposée par évaporation sur l'une des faces adjacentes, tandis que
les deux faces extérieures, intégralement recouverte par un dépôt d'or, constituent un blindage
électromagnétique idéal.
Les hydrophones PVDF à membranes sont large bande. Les résonances du mode
radial dépendent du diamètre interne de l'anneau qui supporte la feuille et sont donc bien

34
inférieures aux fréquences mesurées. La résonance en épaisseur se situe aux alentours de 40
MHz pour un hydrophone coplanaire de 25 µm d'épaisseur. Cependant, ils sont fragiles et ne
peuvent supporter des pressions élevées. Une exposition à des ondes de choc leur est souvent
fatale en raison d'un phénomène de cavitation prenant naissance sur la membrane.
Un nouveau type d'hydrophone à membrane PVDF appelé Golden Lipstick (figure I-
10) est commercialisé par la société S.E.A., USA. Une feuille de PVDF est placée sur un
support ellipsoïdal en résine epoxyde [58]. La terminaison d'un câble coaxial soudé à la
membrane constitue l'élément actif. Le support ellipsoïdal peut renfermer un pré-
amplificateur que la proximité avec l'élément actif rend faiblement sensible aux parasites
électriques. L'ensemble de la membrane est recouverte d'un dépôt d'or. Le Golden Lipstick est
plus robuste que les hydrophone de type aiguille en raison de l'absence d'angles vifs autour de
l'élément actif. Comme dans le cas des hydrophones à membrane classiques, les modes
radiaux ne sont observés qu'à des fréquences très faibles, puisqu'ils se propagent tout au long
de l'ellipsoïde.
Figure I-10 : Hydrophone PVDF Golden Lipstick.
4.3 Les hydrophones à fibre optique
La mesure des ondes de choc générées par les lithotriteurs nécessite l'emploi d'un
hydrophone très large bande, capable de supporter des pressions très élevées et doté d'un
élément actif de très faibles dimensions. Les hydrophones PVDF sont généralement utilisés
pour de telles mesures [59], mais ils sont rapidement endommagés en raison d'un effet de

35
cavitation sur la surface de la membrane [44]. L'ajout d'une lame sur la face avant de l'élément
PVDF permet de le protéger [60] mais la bande passante est considérablement réduite.
Les hydrophones à fibre optique réunissent toutes les conditions nécessaires à la
mesure des ondes de choc [61-63]. Une onde acoustique se propageant dans un liquide
provoque une modification de la densité du milieu, ce qui a pour effet de faire varier son
indice de réfraction. L'hydrophone à fibre optique permet de déterminer cette variation de
l'indice de réfraction par la mesure de la lumière réfléchie à l'extrémité d'une fibre optique
plongée dans le milieu de propagation. Une source laser émet une onde lumineuse, avec une
puissance de l'ordre de quelques centaines de mW, dans une fibre optique (figure I-11). A
l'extrémité de cette fibre, la lumière est partiellement transmise dans le milieu et partiellement
réfléchie. La quantité de lumière réfléchie dépend de l'indice de réfraction du milieu, qui
dépend de l'onde acoustique incidente. Un coupleur optique permet de transmettre cette onde
réfléchie à une photodiode qui convertit l'énergie lumineuse en énergie électrique. Après
amplification, le signal, qui est l'image de la pression acoustique, peut être visualisé sur un
oscilloscope.
source laser
pho todiode +amplificateur
coupleu r optique
ondeincidente
onde réfléchie
oscilloscope
fibre optique
eau
Figure I-11 : Principe de l'hydrophone à fibre optique.

36
Le diamètre de la fibre optique est d'environ 100 µm, ce qui résulte en une très grande
résolution spatiale et un diagramme de directivité très large. de plus, les grandeurs mesurées
étant optiques, cet hydrophone possède une très bonne immunité aux parasites
électromagnétiques. La réponse en fréquence est plate de 0 à 30 MHz et est principalement
limitée par la bande passante de la photodiode et du pré-amplificateur. En effet, en théorie la
bande passante de cet hydrophone est de 30 GHz. La mesure de pressions négatives de fortes
amplitudes ne pose pas de problème, car la cohésion de l'eau sur la fibre est supérieure à la
cohésion de l'eau seule. Dans ce cas, un effet de cavitation à l'extrémité de la fibre peut
conduire à sa rupture, mais ce phénomène est clairement et immédiatement identifié. De plus,
la taille de la fibre et la re-calibration de l'appareil sont des opérations extrêmement simples.
Enfin, la souplesse de la fibre et la longueur disponible facilitent grandement les mesures. Le
coût très élevé de cet hydrophone en est l'inconvénient majeur. Par ailleurs, sa faible
sensibilité le réserve à la mesure d'ondes de choc ou d'ondes de pressions de fortes
amplitudes.
37
Chapitre 2 : Mesures du champ acoustique de différents générateurs d'ondes
de choc : vers un objectif de nouveau générateur piézo-électrique
1 Introduction
Les générateurs piézo-électriques d'ondes de choc utilisés pour la lithotritie, bien que
possédant des avantages par rapport aux générateurs électro-hydrauliques et électro-
magnétiques qui ont été détaillés dans le chapitre 1, ont deux inconvénients majeurs : un
pouvoir de fragmentation des calculs plus faible et un diamètre plus élevé. L'objectif de ce
travail, à long terme, est de concevoir une coupelle piézo-électrique d'un diamètre D proche
de celui des générateurs électro-hydrauliques et électro-magnétiques, ayant par ailleurs un
pouvoir de fragmentation comparable. Pour cela, il est nécessaire de déterminer la pression
qu'il faudrait générer à la surface de cette coupole pour que son efficacité soit comparable à
celle des générateurs non piézo-électriques.
Les phénomènes impliqués dans la fragmentation du calcul n'étant pas à ce jour
totalement expliqués, il est difficile de déterminer théoriquement la pression à générer. C'est
pourquoi la méthode expérimentale suivante a été choisie. Il s'agit de définir, au sein du
champ acoustique d'un lithotriteur commercial dont les performances sont connues, une
coupelle fictive de diamètre D et de mesurer la répartition de la pression sur cette surface
virtuelle à l'aide d'un hydrophone fixé à un bras articulé. Ainsi, on connaîtra la pression, et sa
répartition, qu'il sera nécessaire de générer à la surface d'une coupelle piézo-électrique de
diamètre D pour que ses performances soient équivalentes à celles du lithotriteur commercial
étudié. Bien entendu, cette comparaison ne sera valable que si l'ouverture angulaire de la
coupelle de diamètre D est égale à celle du lithotriteur commercial.
38
Cette étude a été réalisée sur trois lithotriteurs commerciaux de technologies
différentes : électro-conductif, électromagnétique et piézo-électrique.
2 Les générateurs
2.1 Le lithotriteur électro-conductif EDAP-Technomed Sonolith Praktis
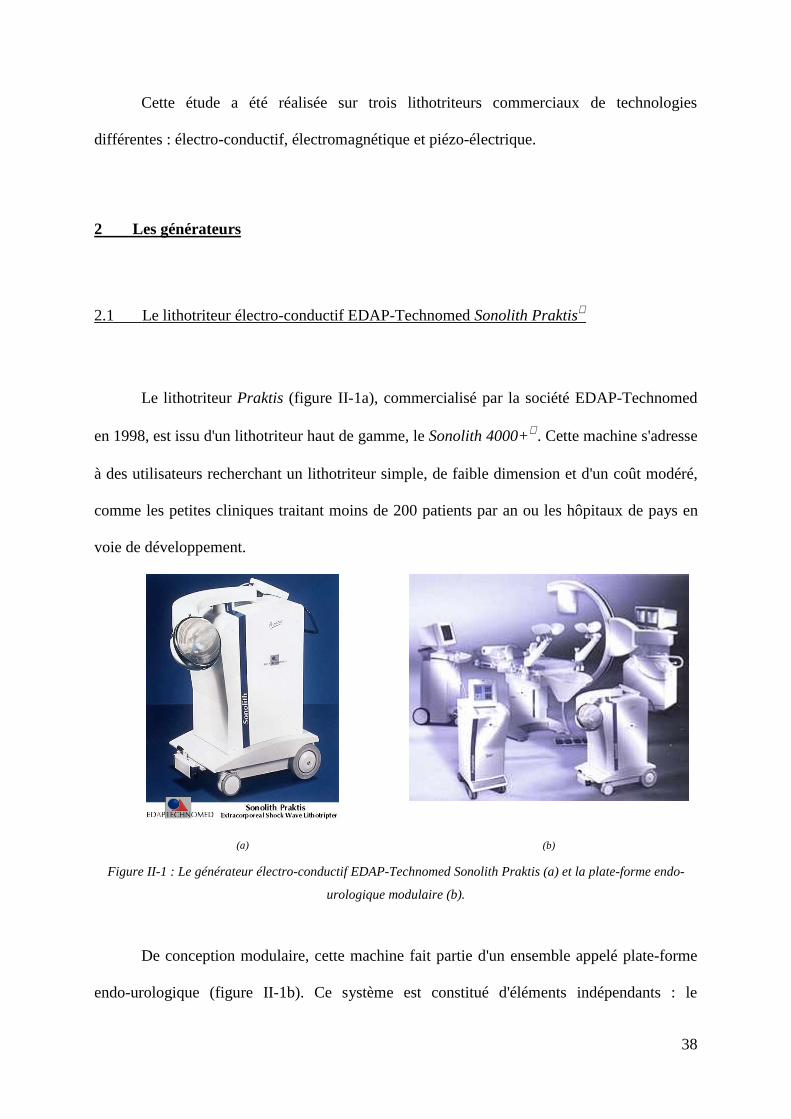
Le lithotriteur Praktis (figure II-1a), commercialisé par la société EDAP-Technomed
en 1998, est issu d'un lithotriteur haut de gamme, le Sonolith 4000+. Cette machine s'adresse
à des utilisateurs recherchant un lithotriteur simple, de faible dimension et d'un coût modéré,
comme les petites cliniques traitant moins de 200 patients par an ou les hôpitaux de pays en
voie de développement.
(a) (b)
Figure II-1 : Le générateur électro-conductif EDAP-Technomed Sonolith Praktis (a) et la plate-forme endo-
urologique modulaire (b).
De conception modulaire, cette machine fait partie d'un ensemble appelé plate-forme
endo-urologique (figure II-1b). Ce système est constitué d'éléments indépendants : le
39
lithotriteur, la table de traitement avec son système de positionnement, un imageur RX et un
échographe. Ces éléments s'assemblent entre eux en vue d'un traitement de lithotritie, et leur
modularité les rend utilisables pour d'autres interventions, ce qui permet de réduire le coût de
fonctionnement. Par ailleurs, ce système a été conçu pour s'adapter à la plupart des imageurs
RX et échographiques, laissant le choix des modèles d'imageurs au praticien.
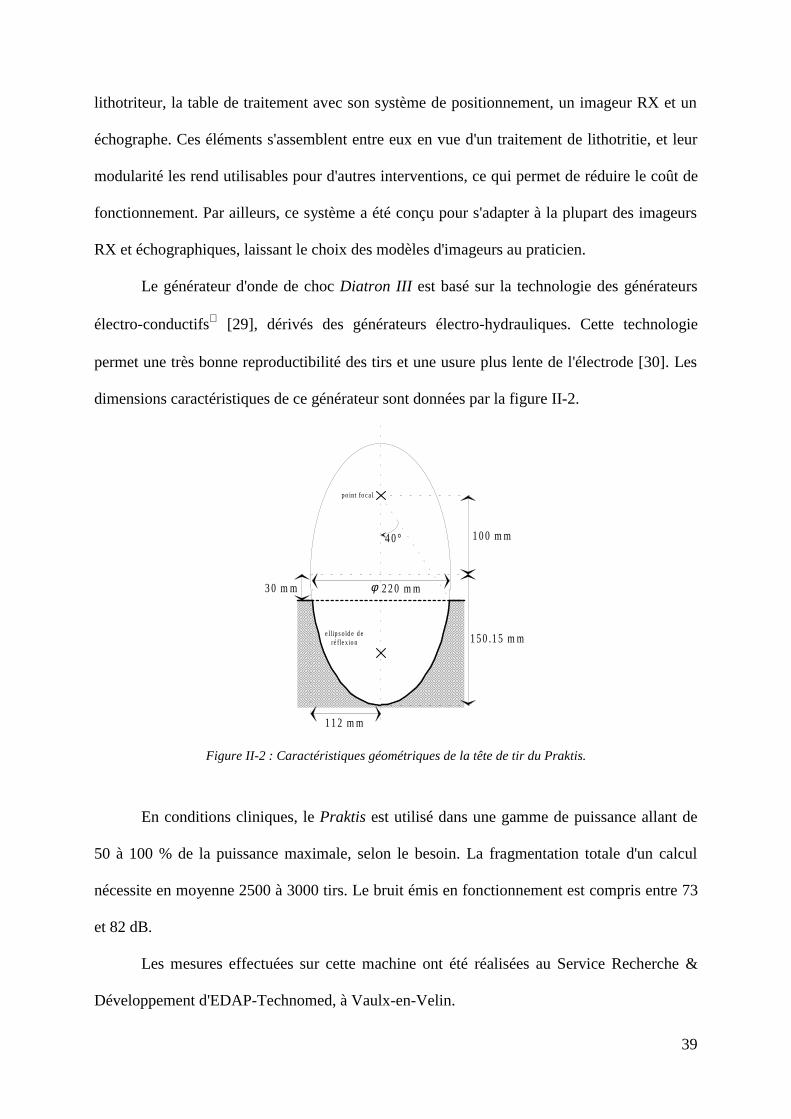
Le générateur d'onde de choc Diatron III est basé sur la technologie des générateurs
électro-conductifs [29], dérivés des générateurs électro-hydrauliques. Cette technologie
permet une très bonne reproductibilité des tirs et une usure plus lente de l'électrode [30]. Les
dimensions caractéristiques de ce générateur sont données par la figure II-2.
e llip s o ïd e d e ré flexio n 1 5 0 .1 5 m m
1 1 2 m m
1 0 0 m m
3 0 m m
4 0 °
2 2 0 m m
po int fo ca l
φ
Figure II-2 : Caractéristiques géométriques de la tête de tir du Praktis.
En conditions cliniques, le Praktis est utilisé dans une gamme de puissance allant de
50 à 100 % de la puissance maximale, selon le besoin. La fragmentation totale d'un calcul
nécessite en moyenne 2500 à 3000 tirs. Le bruit émis en fonctionnement est compris entre 73
et 82 dB.
Les mesures effectuées sur cette machine ont été réalisées au Service Recherche &
Développement d'EDAP-Technomed, à Vaulx-en-Velin.
40
2.2 Le lithotriteur électromagnétique Dornier Lithotripter S
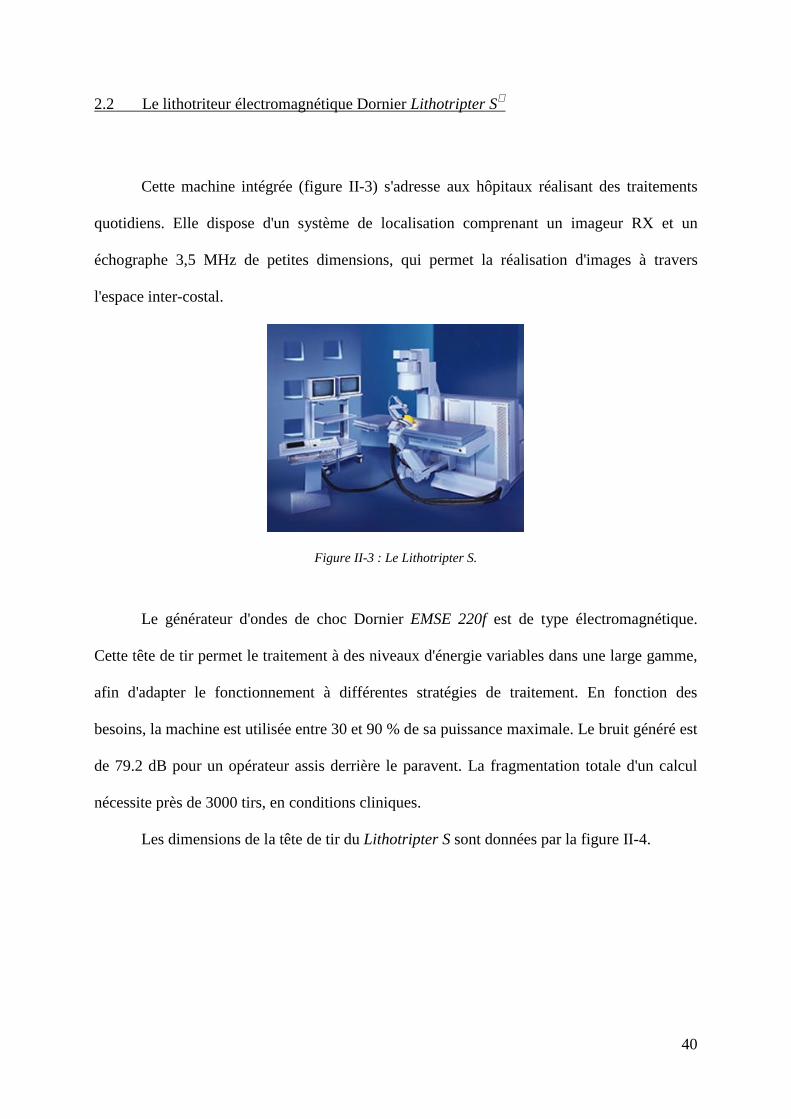
Cette machine intégrée (figure II-3) s'adresse aux hôpitaux réalisant des traitements
quotidiens. Elle dispose d'un système de localisation comprenant un imageur RX et un
échographe 3,5 MHz de petites dimensions, qui permet la réalisation d'images à travers
l'espace inter-costal.
Figure II-3 : Le Lithotripter S.
Le générateur d'ondes de choc Dornier EMSE 220f est de type électromagnétique.
Cette tête de tir permet le traitement à des niveaux d'énergie variables dans une large gamme,
afin d'adapter le fonctionnement à différentes stratégies de traitement. En fonction des
besoins, la machine est utilisée entre 30 et 90 % de sa puissance maximale. Le bruit généré est
de 79.2 dB pour un opérateur assis derrière le paravent. La fragmentation totale d'un calcul
nécessite près de 3000 tirs, en conditions cliniques.
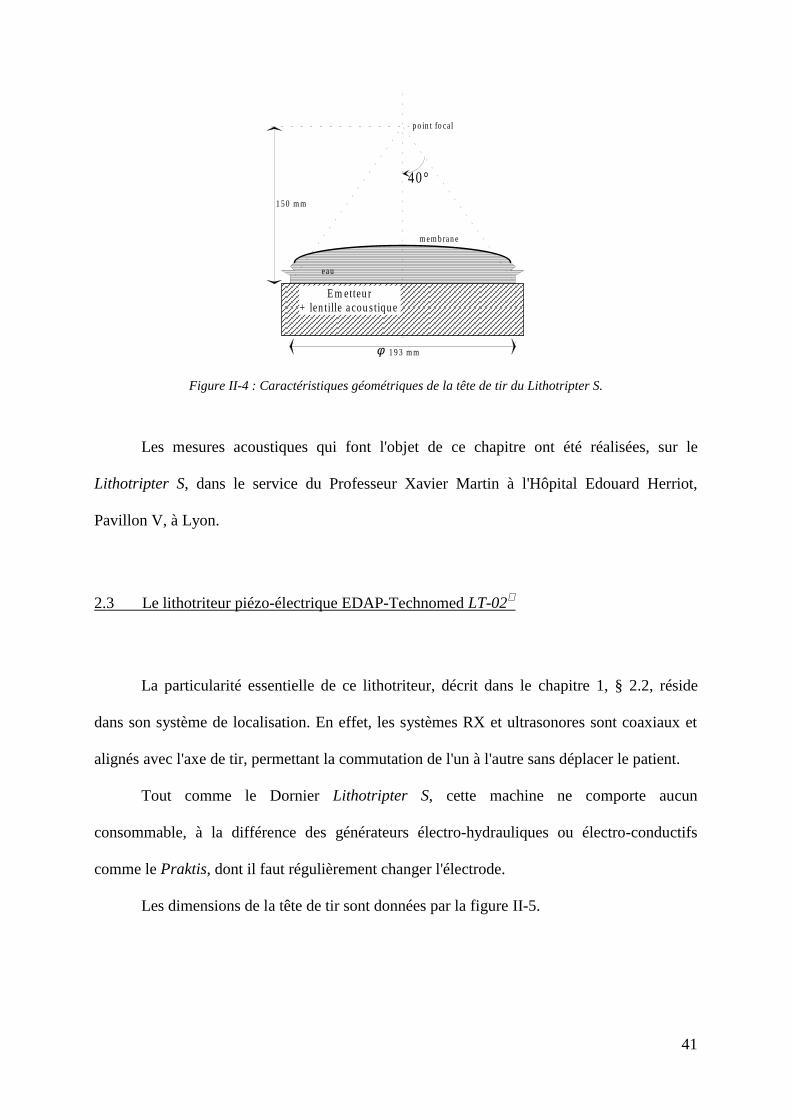
Les dimensions de la tête de tir du Lithotripter S sont données par la figure II-4.
41
E m etteu r + len tille acou stiqu e
40°
1 50 m m
1 9 3 m m
m em b ran e
eau
p o in t fo cal
φ
Figure II-4 : Caractéristiques géométriques de la tête de tir du Lithotripter S.
Les mesures acoustiques qui font l'objet de ce chapitre ont été réalisées, sur le
Lithotripter S, dans le service du Professeur Xavier Martin à l'Hôpital Edouard Herriot,
Pavillon V, à Lyon.
2.3 Le lithotriteur piézo-électrique EDAP-Technomed LT-02
La particularité essentielle de ce lithotriteur, décrit dans le chapitre 1, § 2.2, réside
dans son système de localisation. En effet, les systèmes RX et ultrasonores sont coaxiaux et
alignés avec l'axe de tir, permettant la commutation de l'un à l'autre sans déplacer le patient.
Tout comme le Dornier Lithotripter S, cette machine ne comporte aucun
consommable, à la différence des générateurs électro-hydrauliques ou électro-conductifs
comme le Praktis, dont il faut régulièrement changer l'électrode.
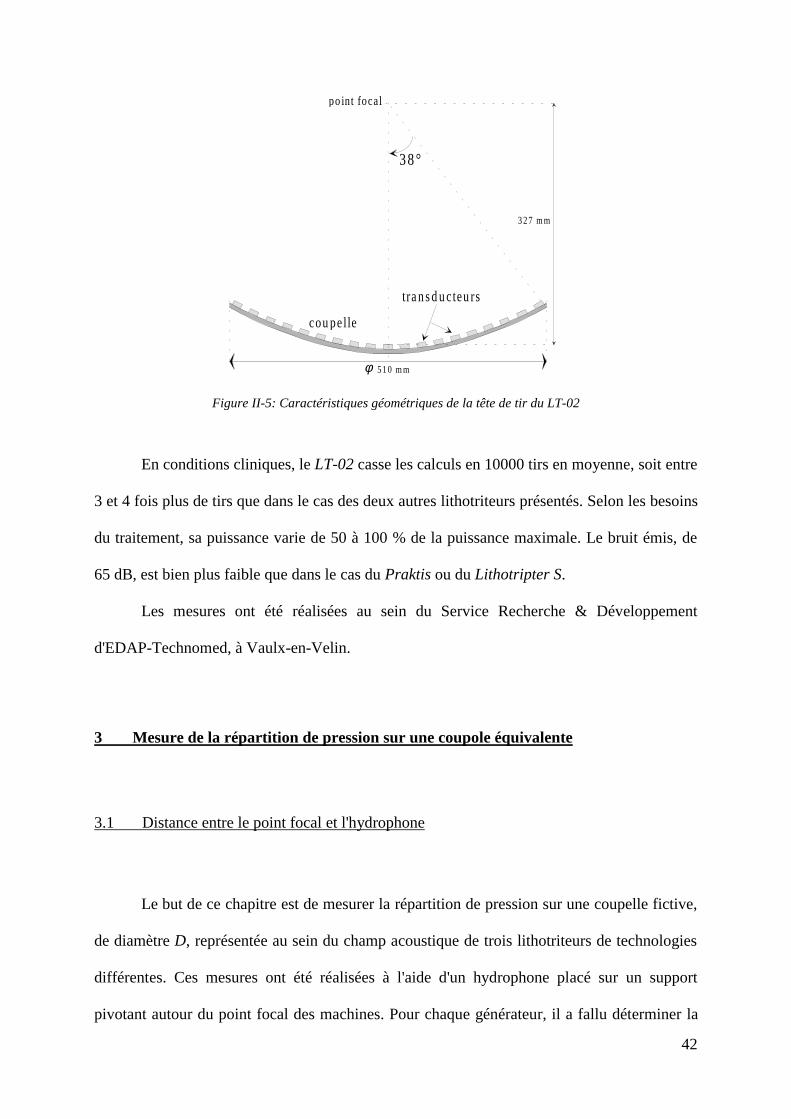
Les dimensions de la tête de tir sont données par la figure II-5.
42
coupelle
38°
tra n s d u cteu rs
51 0 m mφ
po int focal
3 2 7 m m
Figure II-5: Caractéristiques géométriques de la tête de tir du LT-02
En conditions cliniques, le LT-02 casse les calculs en 10000 tirs en moyenne, soit entre
3 et 4 fois plus de tirs que dans le cas des deux autres lithotriteurs présentés. Selon les besoins
du traitement, sa puissance varie de 50 à 100 % de la puissance maximale. Le bruit émis, de
65 dB, est bien plus faible que dans le cas du Praktis ou du Lithotripter S.
Les mesures ont été réalisées au sein du Service Recherche & Développement
d'EDAP-Technomed, à Vaulx-en-Velin.
3 Mesure de la répartition de pression sur une coupole équivalente
3.1 Distance entre le point focal et l'hydrophone
Le but de ce chapitre est de mesurer la répartition de pression sur une coupelle fictive,
de diamètre D, représentée au sein du champ acoustique de trois lithotriteurs de technologies
différentes. Ces mesures ont été réalisées à l'aide d'un hydrophone placé sur un support
pivotant autour du point focal des machines. Pour chaque générateur, il a fallu déterminer la

43
distance d entre l'hydrophone et le point focal afin que l'hydrophone décrive, en se déplaçant,
l'équateur d'une coupelle de diamètre D au sein du champ acoustique. Cette distance est
naturellement fonction du diamètre D désiré, mais aussi de l'ouverture angulaire α des
lithotriteurs étudiés. Elle est donnée par :
)tan(2 α⋅= D
d , Eq. II-1
On choisit de fixer le diamètre D désiré à mmD 220= , valeur proche de celle des
lithotriteurs électromagnétiques et électro-hydrauliques. La table II-1 donne l'ouverture
angulaire α et la distance d pour chaque machine.
Générateur Praktis Lithotripter S LT-02
α (°) 40 40 38
d (mm) 131 131 141
Table II-1 : Ouverture angulaire et distance de mesure pour chaque machine.
3.2 EDAP-Technomed Praktis
Comme le montre la figure II-6, les mesures ont été réalisées sur le Praktis à 131 mm
du point focal. Le capteur utilisé est un hydrophone aiguille PZT-Z44-0400 d'une sensibilité
de 22 MPa/V (SEA, Socquel, USA) relié à un oscilloscope 9310AL (Lecroy, USA). Le
support articulé à un degré de liberté permet la mesure de la pression dans un plan et pour
différents angles. Un petit hydrophone intégré au Praktis, dont la tâche est de mesurer l'onde
incidente afin de permettre le contrôle de l'état de l'électrode, a été utilisé ici pour déclencher
l'oscilloscope. Les mesures ont été réalisées pour des puissances de fonctionnement de 50, 60,
70 et 80 % de la puissance maximale.
La présence de l'électrode à l'intérieur de l'éllipsoïde de réflexion crée une zone
d'ombre acoustique et il est probable que la répartition de la pression ne soit pas

44
axisymétrique sur la surface étudiée. C'est pourquoi les mesures ont été faites dans deux plans
différents. Le premier plan est celui de la figure II-6 : il contient l'axe de l'électrode. Le
second plan de mesure est perpendiculaire au premier.
repérage de la posit ion angu la ire
su pport p ivo tan t a u tou r du po in t foca l
hydrophone
p o in t foca l
1 3 1 m m
ell ipso ïde de réflex ion
électrode
su rface décritepa r l'hydrophone
Figure II-6 : Méthode de mesure sur le générateur EDAP-Technomed Praktis.
3.3 Dornier Lithotripter S
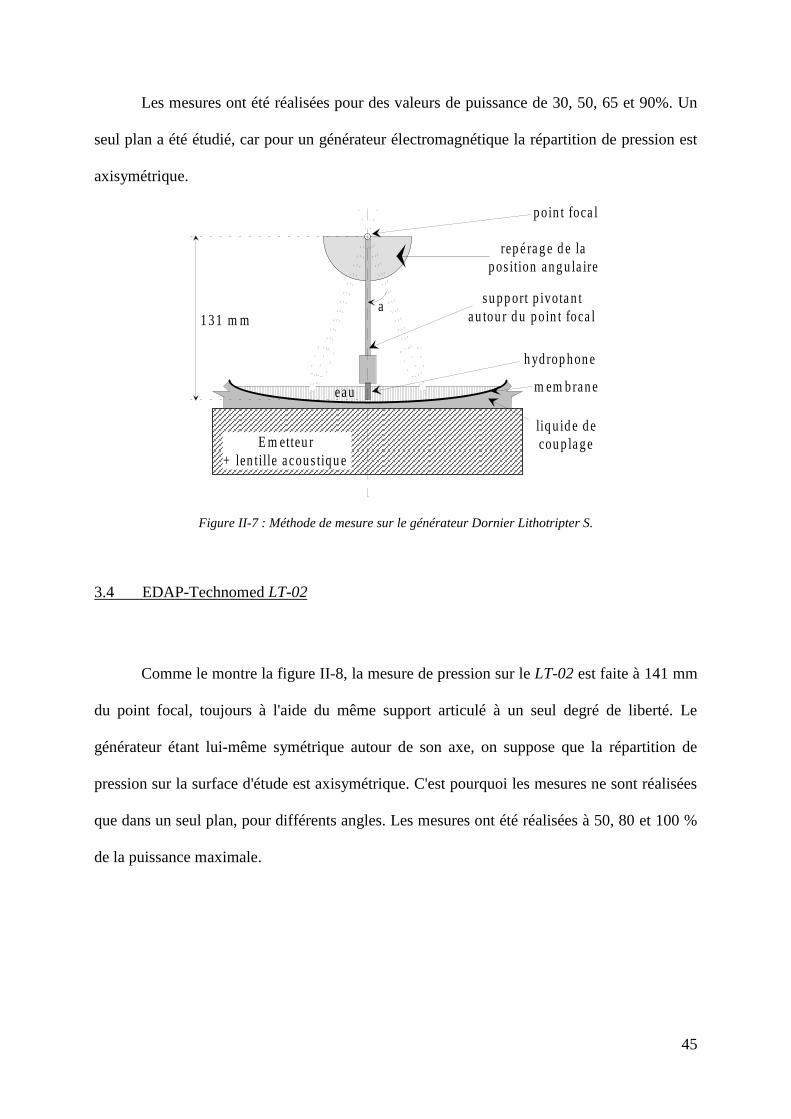
La méthode de mesure sur le Dornier Lithotripter S est représentée par la figure II-7.
En traitement normal, une poche délimitée par une membrane souple est gonflée avec un
liquide de couplage, de manière a assurer le couplage acoustique avec le patient. Ici, cette
poche a été dégonflée jusqu'à ce que la membrane soit concave et puisse être remplie d'une
quantité d'eau suffisante pour les mesures. Le même support a été utilisé pour mesurer la
pression à 131 mm du point focal. Le capteur utilisé est un hydrophone PZT (Imotec,
Allemagne) d'une sensibilité de 78 MPa/V.
45
Les mesures ont été réalisées pour des valeurs de puissance de 30, 50, 65 et 90%. Un
seul plan a été étudié, car pour un générateur électromagnétique la répartition de pression est
axisymétrique.
E m etteu r + len tille acous tiqu e
liq u id e d ecou p lage
eau m em bran e
h yd rop hon e
poin t foca l
rep é rag e d e lapos ition an g u la ire
su pp ort p ivotan t au tou r d u poin t foca l1 31 m m
a
Figure II-7 : Méthode de mesure sur le générateur Dornier Lithotripter S.
3.4 EDAP-Technomed LT-02
Comme le montre la figure II-8, la mesure de pression sur le LT-02 est faite à 141 mm
du point focal, toujours à l'aide du même support articulé à un seul degré de liberté. Le
générateur étant lui-même symétrique autour de son axe, on suppose que la répartition de
pression sur la surface d'étude est axisymétrique. C'est pourquoi les mesures ne sont réalisées
que dans un seul plan, pour différents angles. Les mesures ont été réalisées à 50, 80 et 100 %
de la puissance maximale.

46
1 4 1 m m
p o in t fo c a l
re p é ra g e d e lap o si t io n a n g u la i re
support p ivotant autour d u point focal
hyd rophone
su rfa c e d é c r i te p a r l 'h y d ro p h o n e
c o upe l le
transducteurs
Figure II-8 : Méthode de mesure sur le générateur EDAP-Technomed LT-02.
Un hydrophone aiguille PZT d'une sensibilité de 22 MPa/V (SEA, Socquel, USA) a été
utilisé. Les courbes ont été visualisées sur un oscilloscope 9310AL (Lecroy, USA).
3.5 Exploitation des résultats de mesure
Il est connu que la valeur maximale de pression n'est pas seule responsable de la
fragmentation du calcul [46]. La durée de l'impulsion ayant également une importance,
l'énergie acoustique contenue dans la tache focale semble être mieux corrélée avec le pouvoir
de fragmentation.
Néanmoins, il est intéressant de calculer, à partir des valeurs de pression relevées sur
les trois lithotriteurs pour différents angles, une valeur de pression maximale équivalente.
Celle-ci est définie comme la pression maximale qui, si elle était générée sur la coupelle
d'étude de manière uniforme, engendrerait la même puissance acoustique maximale.

47
Pour chaque angle de mesure αi, un anneau élémentaire d'indice i a été défini sur
lequel on a supposé que la pression était uniformément répartie et égale à la pression mesurée
pour cet angle. Dans le cas du Praktis, les mesures ayant été faites dans deux plans
perpendiculaires entre eux, un demi-anneau a été défini pour chaque valeur αi, un pour
chaque plan.
Sur chacune de ces surfaces élémentaires à pression uniforme Pi(t), la puissance
acoustique maximale est donnée par :
Z
SPW iiMAX
i
⋅=
2
, Eq. II-2
où PiMAX est la valeur maximale de Pi(t).
Sur l'ensemble de la coupelle fictive, la puissance acoustique Wtotal est donc la somme
de toutes les puissances acoustiques élémentaires Wi. La pression maximale équivalente sur
l'ensemble de la coupelle fictive est donc donnée par :
S
WP total
m = , Eq. II-3
4 Résultats
4.1 Maxima de pression en fonction de l'angle
La figure II-9 donne les maxima de pression en fonction de l'angle et de la puissance,
mesurés sur le Praktis dans deux plans perpendiculaires. Sur ces deux plans, les maxima de
pression sont du même ordre de grandeur, à puissances égales. L'ombre de l'électrode est
remarquable, en particulier dans le second plan de mesure, entre 0 et 10°.
48
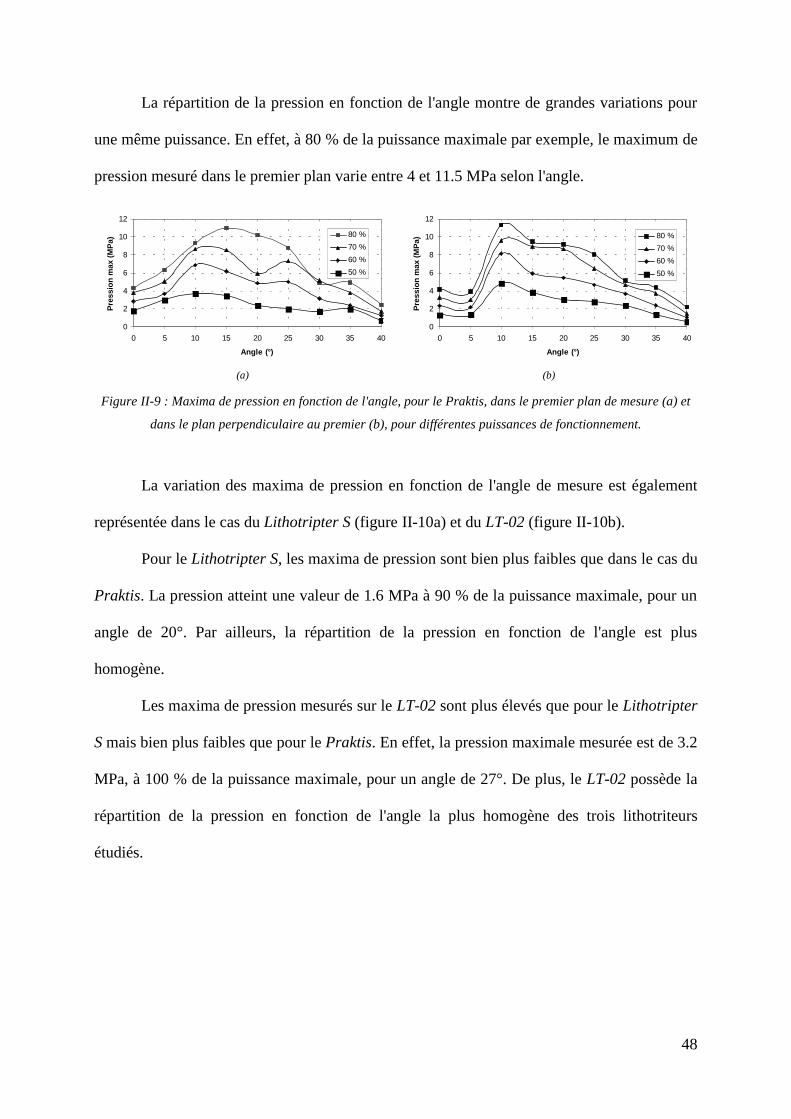
La répartition de la pression en fonction de l'angle montre de grandes variations pour
une même puissance. En effet, à 80 % de la puissance maximale par exemple, le maximum de
pression mesuré dans le premier plan varie entre 4 et 11.5 MPa selon l'angle.
0
2
4
6
8
10
12
0 5 10 15 20 25 30 35 40
Angle (°)
Pre
ssio
n m
ax (
MP
a)
80 %
70 %
60 %
50 %
(a)
0
2
4
6
8
10
12
0 5 10 15 20 25 30 35 40
Angle (°)
Pre
ssio
n m
ax (
MP
a)
80 %
70 %
60 %
50 %
(b)
Figure II-9 : Maxima de pression en fonction de l'angle, pour le Praktis, dans le premier plan de mesure (a) et
dans le plan perpendiculaire au premier (b), pour différentes puissances de fonctionnement.
La variation des maxima de pression en fonction de l'angle de mesure est également
représentée dans le cas du Lithotripter S (figure II-10a) et du LT-02 (figure II-10b).
Pour le Lithotripter S, les maxima de pression sont bien plus faibles que dans le cas du
Praktis. La pression atteint une valeur de 1.6 MPa à 90 % de la puissance maximale, pour un
angle de 20°. Par ailleurs, la répartition de la pression en fonction de l'angle est plus
homogène.
Les maxima de pression mesurés sur le LT-02 sont plus élevés que pour le Lithotripter
S mais bien plus faibles que pour le Praktis. En effet, la pression maximale mesurée est de 3.2
MPa, à 100 % de la puissance maximale, pour un angle de 27°. De plus, le LT-02 possède la
répartition de la pression en fonction de l'angle la plus homogène des trois lithotriteurs
étudiés.

49
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
0 5 10 15 20 25 30 35 40
Angle (°)
Pre
ssio
n m
ax (
MP
a)
90%65%50%
(a)
0
0.5
1
1.5
2
2.5
3
3.5
15 20 25 30 35
Angle (°)
Pre
ssio
n m
ax (
MP
a)
100 % 80 % 50 %
(b)
Figure II-10 : Maxima de pression en fonction de l'angle, pour le Lithotripter S (a) et pour le LT-02 (b), pour
différentes puissances de fonctionnement.
4.2 Pression maximale équivalente en fonction de la puissance
La figure II-11 représente la variation, en fonction de la puissance de fonctionnement,
de la pression maximale équivalente sur l'ensemble de la surface de la coupelle fictive, dans le
cas du Praktis (figure II-11a), du Lithotripter S (figure II-11b) et du LT-02 (figure II-11c).
La valeur la plus élevée est atteinte par le Praktis, avec 7 MPa. Le LT-02 permet de
générer une pression de 2.7 MPa. Enfin, la pression la plus faible, égale à 1.3 MPa, est
obtenue avec le Lithotripter S.
La variation de la pression maximale équivalente en fonction de la puissance est
linéaire dans le cas du Praktis et du LT-02. Pour le Lithotripter S, cette variation présente une
légère croissance exponentielle en fonction de la puissance.
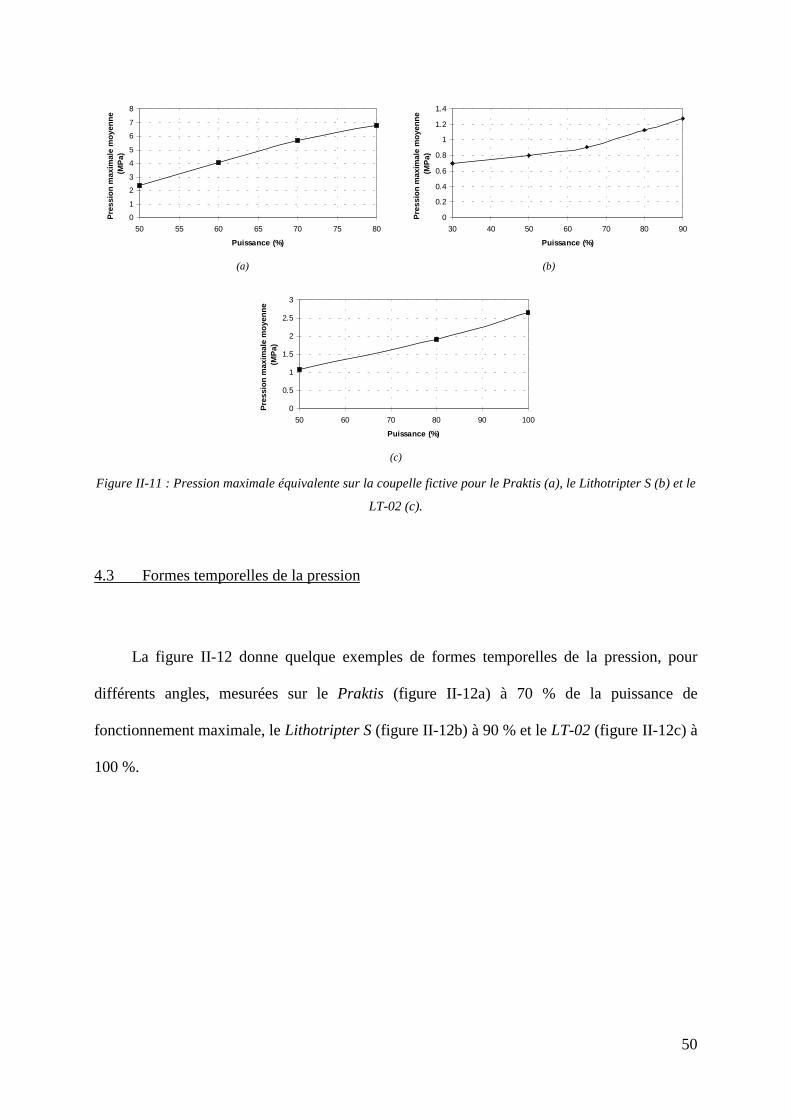
50
0
1
2
3
4
5
6
7
8
50 55 60 65 70 75 80
Puissance (%)
Pre
ssio
n m
axim
ale
moy
enne
(M
Pa)
(a)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
30 40 50 60 70 80 90
Puissance (%)
Pre
ssio
n m
axim
ale
moy
enne
(M
Pa)
(b)
0
0.5
1
1.5
2
2.5
3
50 60 70 80 90 100
Puissance (%)
Pre
ssio
n m
axim
ale
moy
enne
(M
Pa)
(c)
Figure II-11 : Pression maximale équivalente sur la coupelle fictive pour le Praktis (a), le Lithotripter S (b) et le
LT-02 (c).
4.3 Formes temporelles de la pression
La figure II-12 donne quelque exemples de formes temporelles de la pression, pour
différents angles, mesurées sur le Praktis (figure II-12a) à 70 % de la puissance de
fonctionnement maximale, le Lithotripter S (figure II-12b) à 90 % et le LT-02 (figure II-12c) à
100 %.

51
-2
0
2
4
6
8
10
12
112 113 114 115 116 117 118
t (µs)
Pre
ssio
n (M
Pa
) 10°20°30°40°
(a)
-1.5
-1
-0.5
0
0.5
1
1.5
2
70 75 80 85 90 95 100
t (µs)
Pre
ssio
n (M
Pa)
0°10°20°30°35°
(b)
-3
-2
-1
0
1
2
3
4
5
6
198 200 202 204 206 208 210
t (µs)
Pre
ssio
n (M
Pa)
33°
27°
16°
(c)
Figure II-12 : Formes temporelles de la pression en fonction de l'angle, mesurées sur le Praktis à 70 % de la
puissance maximale (a), le Lithotripter S à 90 % (b) et le LT-02 à 100 % (c).
A partir des formes temporelles acquises sur les trois machines, le temps de montée de
l'onde de pression et la durée totale de l'impulsion ont été mesurés en fonction de l'angle.
Dans le cas du Praktis, les formes temporelles n'ont été acquises qu'à 70 % de la puissance de
fonctionnement maximale. L'évolution de la durée du front montant et de la durée totale de
l'impulsion est représentée figure II-13a. Pour le Lithotripter S et le LT-02, les mesures ont été
faites respectivement pour 50, 65, 90 % et 50, 80, 100 %. La moyenne par valeur de puissance
est représentée figure II-13b et figure II-13c en fonction de l'angle de mesure, ainsi que l'écart
type.

52
020406080
100120140160180200
5 10 15 20 25 30 35 40
Angle (°)
Fro
nt m
onta
nt (
ns)
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Dur
ée to
tale
(µs
)
Front montant
Durée totale
(a)
0
0.5
1
1.5
2
2.5
3
3.5
4
0 10 20 30 35
Angle (°)
Fro
nt M
onta
nt (
µs)
012345678910
Dur
ée T
otal
e (µ
s)
Front montant
Durée totale
(b)
0.6
0.8
1
1.2
1.4
1.6
1.8
2
15 20 25 30 35
Angle (°)
Dur
ée (
µs)
Front montant
Durée totale
(c)
Figure II-13 : Durée du front de montée de la pression et durée totale de l'impulsion en fonction de l'angle,
mesurées sur le Praktis (a), le Lithotripter S (b) et le LT-02 (c).
L'écart type entre les durées mesurées pour une valeur de puissance donnée se révèle
être très faible devant la moyenne dans le cas du LT-02. La puissance de fonctionnement n'a
que très peu d'influence sur la durée du front montant et la durée totale de l'impulsion. Pour le
Lithotripter S, l'écart type est relativement plus élevé par rapport à la moyenne mais reste
faible.
Le Praktis présente les impulsions les plus rapides des trois machines. Si l'on exclut le
premier angle de mesure de 5°, probablement non représentatif du générateur en raison du
cône d'ombre dû à la présence de l'électrode, les durées mesurées sont indépendantes de
l'angle. Le front montant a une durée moyenne de 40 ns, tandis que la durée totale de
l'impulsion est en moyenne de 1 µs. L'onde est déjà très choquée à 131 mm du point focal.
Pour le Lithotripter S, la durée du front montant varie entre 1.5 et 3.5 µs, en fonction de
l'angle. La durée totale de l'impulsion varie entre 4.5 et 8 µs. La formation de l'onde de choc
53
est déjà largement entamée à 131 mm du point focal, bien que l'onde soit moins choquée que
dans le cas du Praktis.
Enfin, pour le LT-02, la variation des durées mesurées en fonction de l'angle est faible.
La durée moyenne du front montant est de 900 ns. La durée totale de l'impulsion est de 1.6 µs.
On constate que seule la troisième arche est choquée, à 141 mm du point focal, la première
arche n'étant que très peu déformée.
5 Discussion et Conclusion
La pression maximale équivalente sur la coupelle d'étude est la plus importante pour le
Praktis, avec 7 MPa, puis viennent le LT-02 (2.7 MPa) et le Lithotripter S (1.3 MPa). Le
Lithotripter S génère l'impulsion la plus longue, d'une durée comprise entre 4.5 et 8 µs selon
l'angle de mesure, le Praktis et le LT-02 générant une impulsion de 1 µs et 1.6 µs
respectivement.
Il ressort de ces résultats que le Praktis et le Lithotripter S adoptent deux stratégies
différentes pour aboutir à des pouvoirs de fragmentation comparables : le premier génère une
impulsion d'amplitude élevée mais de courte durée, tandis que l'impulsion générée par le
second est d'amplitude faible mais de longue durée. Le LT-02, quant à lui, génère une
impulsion qui n'est ni longue ni d'amplitude élevée. L'impulsion dure légèrement plus
longtemps que dans le cas du Praktis et l'amplitude est à peine deux fois plus élevée que dans
le cas du Lithotripter S. Son pouvoir de fragmentation est donc beaucoup plus faible (10000
tirs pour fragmenter un calcul contre 3000 pour le Lithotripter S et le Praktis).
Une différence importante entre les trois machines réside également dans la forme
temporelle des signaux de pression. En effet, l'onde est plus ou moins choquée par effets non-
linéaires de propagation selon la machine étudiée. Dans le cas du Praktis, de par la rapidité de
54
la formation de la bulle de gaz entre les électrodes et la forte amplitude de pression générée,
l'onde apparaît fortement choquée. Ceci signifie qu'une quantité importante de l'énergie
acoustique initialement émise a déjà été perdue par effets non-linéaires avant d'atteindre la
surface considérée, à 131 mm du point focal, et que cette perte s'intensifiera encore tout au
long de la propagation jusqu'au point focal. Dans le cas du LT-02, on constate que l'onde est
fortement choquée au niveau de la troisième arche. En effet, celle-ci ayant une amplitude plus
élevée que la première arche, elle subit plus rapidement une distorsion liée à la propagation
non linéaire. Des simulations numériques montrent que cette partie du signal finit par
disparaître, avant d'atteindre le point focal, en raison de la cavitation provoquée par l'arche
précédente qui est négative [64, 65]. Ainsi, seule la première arche du signal émis participe à
la formation de l'onde de choc telle qu'elle est observée au point focal. Les formes temporelles
acquises montrent que la première arche n'a presque pas subi de déformation à 141 mm du
point focal. Dans le cas du Lithotripter S, l'onde étant d'amplitude faible, le signal est bien
moins choqué que dans le cas du Praktis. Néanmoins, le front de montée de l'onde est
relativement rapide, ce qui ne peut pas être expliqué uniquement par des effets non linéaires
lors de la propagation dans l'eau. La déformation est plus forte que dans le cas du LT-02, bien
que l'amplitude du signal émis soit plus faible pour le Lithotripter S. Il est probable que ce
front rapide provienne soit de la génération de l'onde elle-même par la technologie
électromagnétique, soit de la lentille acoustique dont les matériaux constituants sont
généralement le siège d'effets non-linéaires plus importants que dans l'eau [66].
Par ailleurs, la répartition de la pression acquise sur la surface de mesure est plus ou
moins homogène en fonction du type de générateur. Le Praktis génère une répartition de
pression très hétérogène, en raison d'une part de la présence de l'électrode et d'autre part du
système de focalisation [67]. Le fait que cette machine soit également celle qui provoque la
douleur la plus importante des trois machines étudiées est certainement lié à cette observation.
55
En effet, la non-uniformité de la répartition de pression au niveau de la peau induit des
contraintes dans les tissus superficiels qui sont douloureusement ressenties par le patient. Le
Lithotripter S génère une onde plus uniforme sur la surface considérée que le Praktis, mais
moins que le LT-02. Le système de focalisation choisi (lentille acoustique) semble mieux
adaptée que la semiellipsoïde du Praktis mais ne permet pas d'obtenir l'uniformité en pression
atteinte par le LT-02. Il est reconnu que cette dernière machine est celle qui provoque la
douleur la plus faible des trois lithotriteurs considérés.
Le choix de la technologie piézo-électrique rend possible la génération d'une onde
dont la répartition d'énergie acoustique au niveau de la peau est quasi uniforme, soit en
améliorant le taux de remplissage des transducteurs élémentaires dans la coupelle (par un
choix de forme et de disposition optimal), soit par l'utilisation de matériaux composites. En
effet, ces matériaux pouvant être formés, il est possible de fabriquer une coupelle dont toute la
surface est émettrice.
Le pouvoir de fragmentation semble être relativement bien corrélé avec l'énergie
acoustique contenue dans l'impulsion émise par le générateur, selon les études les plus
récentes [46, 47]. L'amplitude de l'impulsion n'est pas seule responsable de la fragmentation :
la durée est également un paramètre important.
Compte tenu des mesures réalisées sur le LT-02, on sait qu'une impulsion de 2.7 MPa
d'amplitude et de 1.6 µs de durée à la surface d'un générateur de 220 mm de diamètre est
nécessaire pour que ce générateur ait un pouvoir de fragmentation comparable à celui du LT-
02. Or, notre objectif n'est pas seulement de réduire le diamètre du générateur, mais
également d'augmenter son pouvoir de fragmentation. Pour cela, l'amplitude de l'impulsion
de pression et/ou sa durée doivent être augmentés.
Par ailleurs, l'exemple du Praktis et en particulier du Lithotripter S montre bien
l'intérêt de générer une onde d'amplitude relativement faible mais de durée importante. Dans
56
le cas contraire, comme l'illustrent les mesures réalisées sur le Praktis, les effets non-linéaires
sont favorisés et une partie importante de l'énergie acoustique émise n'atteint pas le point
focal. Pour que les performances désirées soient atteintes, ces pertes doivent être compensées
à l'émission. Ainsi, il serait intéressant de diminuer la fréquence de résonance des
transducteurs, c'est-à-dire d'augmenter leur épaisseur, afin d'allonger la durée de l'impulsion.
Les transducteurs qui équipent les générateurs piézo-électriques actuels comme le LT-02 ou le
Piezolith commercialisé par la société Richard Wolf résonnent à environ 400 kHz [51]. La
durée de la première arche, partie utile du signal, est donc d'environ 1.25 µs. Or, on sait que la
pression générée à la surface d'un transducteur piézo-électrique est proportionnelle au champ
électrique appliqué. Si on réduit la fréquence de résonance du transducteur, c'est-à-dire que
l'on augmente l'épaisseur du matériau de manière à augmenter la durée de la première arche, il
devient difficile de générer des pressions suffisamment élevées. La valeur de 400 kHz
couramment choisie est donc un compromis, pour les matériaux piézo-électriques utilisés sur
ces machines, entre la volonté d'obtenir une impulsion relativement longue et la nécessité de
conserver une épaisseur assez faible pour que le champ électrique, et donc la pression émise,
soit suffisamment importante.
Des études précédentes ont montrés qu'à la surface du LT-02, l'impulsion de pression a
une amplitude de 1.27 MPa et une durée de 1.4 µs, ce qui correspond à une fréquence de
résonance des transducteurs de 360 kHz. Bien que les documents relatifs à la conception de
cette machine ne nous soient pas accessibles, il est raisonnable de penser que la valeur de 1.27
MPa correspond à une limite de fonctionnement du matériau piézo-électrique utilisé (P7-62)
pour une durée d'impulsion de 1.4 µs. C'est pourquoi l'utilisation d'un autre matériau piézo-
électrique, permettant d'augmenter la pression générée à la surface, est envisagé. Dans cette
optique, l'étude de différents matériaux fait l'objet du chapitre 4.
57
A la lumière des résultats présentés, l'objectif de générer une impulsion de 3 MPa
d'amplitude et d'une durée d'environ 2.5 µs, correspondant à une fréquence de résonance de
200 kHz, est fixé. Un générateur de 220 mm de diamètre générant une telle impulsion à sa
surface aura un pouvoir de fragmentation supérieur à celui du LT-02, probablement plus
proche du Praktis et du Lithotripter S, d'autant plus que l'onde émise ne sera pas choquée et
que les pertes par effets non linéaires seront plus faibles que pour ces deux dernières
machines. Enfin, une attention particulière sera portée à la réduction, autant que possible, des
oscillations qui suivent la première arche de pression. Celles-ci ne participent pas à la
formation de l'onde de choc au point focal. En revanche, elles fatiguent inutilement le
transducteur.

58

58
Chapitre 3 : Modélisation temporelle d'un transducteur ultrasonore excité par
décharge capacitive
1 Introduction
Le but de ce chapitre est d'étudier la réponse électroacoustique d'un transducteur mince
excité par décharge capacitive via un commutateur, dans le but de concevoir un outil
informatique qui sera utile à la conception des systèmes d'excitation électrique.
Différentes méthodes de modélisation ont été proposées dans la littérature depuis les
années 1950 pour décrire la réponse électroacoustique et/ou acousto-électrique de
transducteurs piézo-électriques. Celles-ci sont de deux types : les méthodes temporelles [68,
69] et les méthodes fréquentielles [70-74]. Ces modèles ont tous en commun une
représentation du circuit électrique d'excitation à l'aide d'un réseau d'éléments passifs
invariants dans le temps. En effet, l'excitation électrique est généralement modélisée par un
générateur de tension et sa résistance de sortie, tandis que le réseau d'adaptation électrique est
décrit à l'aide de composants résistifs, capacitifs ou inductifs assemblés en série ou en
parallèle.
Très souvent, cette représentation du circuit électrique d'excitation à l'aide d'éléments
strictement invariants dans le temps est conforme à la réalité et donne donc des résultats très
satisfaisants. On peut citer par exemple le cas très répandu du transducteur excité à l'aide de
trains d'ondes sinusoïdaux ou en régime harmonique continu par l'intermédiaire d'un
amplificateur de puissance [75]. Néanmoins, dans le cas de la génération d'ondes de choc [51-
53] où le transducteur est excité par décharge capacitive via un commutateur, l'hypothèse
d'invariance des éléments du système n'est pas valable. En effet, le comportement du
commutateur, dans ce cas, varie en fonction du temps. Son impédance de sortie dépend de

59
l'état du commutateur : s'il conduit, l'impédance de sortie du générateur est faible; s'il ne
conduit pas, elle est élevée. Ainsi, la représentation de l'impédance de sortie par une
résistance constante ne peut décrire la réalité. De même, le cas se présente lorsque le circuit
électrique d'un transducteur, qu'il soit émetteur ou récepteur, comporte des éléments actifs tels
que des diodes. En effet, le comportement de ces composants est fonction des conditions
électriques et ne peut donc pas être représenté par des éléments invariants dans le temps.
C'est pourquoi a été développée une méthode d'analyse des transducteurs piézo-
électriques et de leur circuit d'excitation qui permet de prendre en compte les éléments
électriques variant dans le temps éventuellement présents dans le système. Devant
l'impossibilité de modéliser de tels éléments dans le domaine fréquentiel, le modèle a été
développé dans le domaine temporel.
Après un rappel des relations mathématiques décrivant le fonctionnement d'un
transducteur mince vibrant en épaisseur et une description de la méthode proposée, une
application à un exemple concret d'excitation impulsionnelle de transducteur piézo-électrique
est présentée. La validité du modèle est testée par comparaison entre les résultats théoriques et
expérimentaux.
2 Rappel des équations régissant le fonctionnement d'un transducteur mince
Le cas considéré est celui du transducteur mince, c'est-à-dire un disque piézo-
électrique de rayon infini et polarisé perpendiculairement aux faces sur lesquelles des
électrodes ont été déposées. Dans ce cas, le déplacement des faces w&
, le vecteur de
polarisation P&
, l'induction électrique D&
et le champ électrique E&
sont parallèles à l'axe (0z)
du disque (figure III-1).

60
0z
i
v
D&
P&
E&
é lec trod e s
fa ce Afa ce B
b ac k ing cha rge
Figure III-1 : Cas du transducteur mince.
Tous les vecteurs considérés ayant la même direction, seules leurs normes seront
considérées dans la suite du chapitre.
Si T est la composante selon (0z) de la contrainte et w le déplacement des faces, les
composantes latérales étant négligées, les équations fondamentales de la piézo-électricité
s'écrivent [70] :
−=
−=
dx
dwhDE
Dhdx
dwCT
S
D
3333
3333
β
, (a) Eq. III-1
(b)
avec DC33 la constante élastique suivant (0z) mesurée à induction nulle, β33S l'inverse de
la permittivité selon (0z) à déformation nulle et h33 la constante piézo-électrique en mode
épaisseur. Rappelons que la condition de déformation nulle correspond au transducteur
encastré, tandis que la condition d'induction nulle correspond au transducteur en court-circuit.
La tension aux bornes du transducteur est obtenue à partir de l'équation III-1b [76]:
( )WBWAhDe
VTxS
−⋅−⋅= 3333ε
, Eq. III-2

61
avec e l'épaisseur du matériau, S33ε la permittivité à déformation nulle, WA et WB le
déplacement des faces A et B.
Par ailleurs, la vitesse de vibration des faces A et B peut être exprimée en fonction de
l'impédance acoustique des différents milieux [76]. Elle est donnée par :
+⋅−
=
+⋅
=
TBB
TLA
ZZ
DhV
ZZ
DhV
33
33 , (a) Eq. III-3
(b)
où ZT, ZB et ZL sont respectivement les impédances acoustiques du matériau piézo-
électrique, du backing et de la charge.
3 Méthode d'analyse
La méthode proposée consiste en l'analyse directe des ondes de forces qui se
propagent au sein du transducteur et se réfléchissent aux interfaces entre les différentes
couches.
Pour plus de simplicité, la méthode est décrite à partir d'une structure basique d'un
transducteur piézo-électrique sans lame, vibrant en épaisseur, et de son circuit d'excitation
(figure III-2). u(t) est la tension d'excitation, L est une self d'adaptation et VTx(t) est la tension
aux bornes du transducteur. La résistance R(t) est une fonction du temps.
Figure III-2 : Schéma de base d'excitation d'un transducteur piézo-électrique.

62
Les lois générales de l'électricité donnent la relation suivante :
)()()()()( tVTxtitRtutdt
diL −⋅−= , Eq. III-4
à partir de laquelle le courant i(t) traversant le transducteur peut être déduit.
Dans l'équation III-4, la tension aux bornes du transducteur VTx(t) est obtenue à partir
de l'équation III-2 :
( ))()()()( 3333
tWBtWAhe
tDtVTxS
−⋅−⋅=ε
, Eq. III-5
L'induction électrique D(t) dans le transducteur est donné par :
( ) ∫ ⋅=t
dttiS
tD0
)(1
, Eq. III-6
où S est la surface active du transducteur.
WA(t) et WB(t) sont les déplacements des interfaces A et B. Ces déplacements sont
calculés en tant qu'intégrales des vitesses de déplacement des deux interfaces VA(t) et VB(t).
Les vitesses de déplacement de A et B sont la somme de deux termes. Le premier
correspond aux vitesses de déplacement de A et B qui sont générées au temps t considéré par
l'effet piézo-électrique, calculé à partir de l'équation III-3 :
+=
+−=
⋅
⋅
TL
TB
ZZ
tDhtVApiezo
ZZ
tDhtVBpiezo
)()(
)()(
33
33 , Eq. III-7
Le second terme correspond aux vitesses de déplacement de A et B dues aux ondes de
force qui ont été générées dans le passé et qui se propagent au sein du transducteur en se
réfléchissant sur les interfaces. Comme le montre la figure III-3 [68], ces vitesses de
déplacements VAReflections(t) et VBReflections(t) sont des fonctions de VApiezo(t-n.τ) et
VBpiezo(t-n.τ), vitesses de déplacement connues d'ondes générées dans le passé (avec τ le

63
temps de vol des ultrasons et n un entier positif), et de RA et RB, les coefficients de réflexion
aux interfaces A et B donnés par :
LT
LTA ZZ
ZZR
+−
= et BT
BTB ZZ
ZZR
+−
= , Eq. III-8
Figure III-3 : Réflexion des ondes de force au sein du transducteur.
Ainsi, les vitesses totales de déplacement de A et de B sont donnés par :
∑
∑
∞
=∞
=
+=
+=
1
1
)()()(
)()()(
nn
nn
tonsVAReflectitVApiezotVA
tonsVBReflectitVBpiezotVB , Eq. III-9
L'équation III-4 est résolue par la méthode d'Euler. Si tkt ∆⋅= , avec k un entier
positif et ∆t un pas temporel arbitraire tel que τ/∆t est un entier, l'équation III-4 devient :
( )kkkkkk VTxiRuL
tii −⋅−⋅∆+=+1 , Eq. III-10
Le terme ik+1 est donc calculé à partir de uk et Rk, la tension d'excitation et la valeur
courante de la résistance variable, et ik et VTxk le courant et la tension aux bornes du
64
transducteur calculés au pas précédent. Le premier pas est calculé à partir des conditions
initiales suivantes : VTx0 = 0 et i0 = 0.
L'induction électrique devient :
S
tiiDD kk
kk
∆⋅+
+= ++ 2
11 , Eq. III-11
et les vitesses totales de déplacement des interfaces A et B :
∑
∑=
+++
=+++
+=
+=
N
nknkk
N
nknkk
onsVAReflectiVApiezoVA
onsVBReflectiVBpiezoVB
11,11
11,11
, Eq. III-12
où N est le nombre de réflexions considérées dans l'intervalle de temps étudié. Dans
l'équation III-12, et par analogie avec l'équation III-9, VApiezok+1 et VBpiezok+1 sont fonctions
de Dk+1 et des impédances acoustiques des différents milieux, tandis que VAReflectionsn,k+1 et
VBReflectionsn,k+1 sont fonctions des vitesses de déplacement d'ondes générées dans le passé
et des coefficients de réflexion aux interfaces.
Finalement, la tension aux bornes du transducteur est obtenue grâce à la relation
suivante :
( )113333
11 ++++ −⋅−⋅= kkSkk WBWAhe
DVTxε
, Eq. III-13
où WAk+1 et WBk+1, les déplacements de A et de B, sont obtenus par intégration des
vitesses de déplacement VA et VB.
Ainsi, les termes ik+1 et VTxk+1 peuvent être utilisés pour le calcul du pas suivant en
étant réinjectés dans l'équation III-10.

65
4 Vérification expérimentale
Afin de tester la validité de la méthode, un dispositif expérimental a été mis en place et
modélisé dans le but de comparer résultats théoriques et expérimentaux.
4.1 Matériel et méthodes
4.1.1 Transducteur
Le transducteur utilisé est un disque en matériau céramique P7-62 (Navy Type I)
provenant de la société Quartz et Silice, à Nemours, France. Les caractéristiques de ce
matériau sont données par la table III-1. Des électrodes en argent ont été déposées sur chaque
face du disque, sur lesquelles les fils de connexion électrique ont été soudés. Le transducteur
est monté dans un boîtier en PVC avec un milieu arrière et une lame quart d'onde d'une
impédance acoustique égale à 4.4 MRayl (Stycast 2651 Emerson & Cuming, Westerlo,
Belgique). Il est plongé dans une cuve d'huile de ricin, dont l'impédance acoustique est de 1.5
MRayl.
diamètre(mm)
épaisseur(mm)
f0
(kHz)C33
D
(1010 N.m-2)h33
(108 V/m-1)ρ(kg.m-3)
ε33S/ε0 kt ZT
(MRayl)
37.25 4.9 420 12.69 21.4 7550 690 0.47 30.95
Table III-1 : Caractéristiques du matériau piézo-électrique.

66
4.1.2 Excitation électrique
Le transducteur est excité par la décharge d'un condensateur à travers un commutateur
constitué de transistors montés en régime avalanche, comme le montre la figure III-4. Un
générateur de fonction HP 8116A (Hewlett Packard GmbH, Allemagne) déclenche le
phénomène d'avalanche qui rend conductrice la chaîne de transistors en un temps très court
(environ 20 ns). Les résistances de 1 MΩ servent à équilibrer les tensions collecteur-émetteur
des 3 transistors, lorsqu'ils sont bloqués. La capacité de sortie CSwt du commutateur est de 30
pF. Le condensateur de 22 nF est chargé par une alimentation stabilisée 205A-03R (Berton
Associates, Inc.) délivrant une tension de 670 volts. Quand le commutateur devient
conducteur, le condensateur se décharge rapidement dans le transducteur via la résistance
série Rs = 48 Ω. Durant cette phase, un courant électrique circulant dans le commutateur le
maintient fermé. Lorsque le transducteur a emmagasiné toutes les charges électriques qu'il est
capable de stocker, le courant passant dans le commutateur devient nul et celui-ci se bloque.
Le transducteur se décharge alors à travers la résistance parallèle Rp = 9.8 kΩ.
Figure III-4 : Dispositif expérimental d'excitation du transducteur.

67
4.1.3 Mesures
Les tensions électriques aux bornes du transducteur et aux bornes du commutateur ont
été mesurées à l'aide d'une sonde P6015A (Tektronix, USA). Un transformateur de courant
110A (Pearson, Palo Alto, USA) a permis de mesurer le courant traversant le transducteur,
tandis que la mesure du courant passant dans le commutateur a été obtenue par la mesure de la
tension aux bornes d'une résistance d'1 Ω, placée au pied de la chaîne de transistor, grâce à
une sonde Tektronix 50075. La pression générée à la surface du transducteur a été mesurée
avec un hydrophone de type Lipstick (SEA, Socquel, USA) dont la réponse est de +/- 1.5 dB
de 200 kHz à 20 MHz. Le capteur était situé sur l'axe du transducteur, à une distance faible de
la surface.
Les différents capteurs étaient reliés à un oscilloscope Tektronix TDS520.
L'acquisition des courbes a été faites sur PC par l'intermédiaire d'une carte IEEE.
4.1.4 Modélisation de l'exemple proposé
Le type de système électrique d'excitation des transducteurs décrit plus haut, qui est
fréquemment utilisé [77], illustre bien le problème de la modélisation de composants
électriques variant dans le temps. En effet, il a été vu que lorsque le transducteur a
emmagasiné toutes les charges électriques qu'il est capable d'emmagasiner, le courant
traversant le commutateur devient nul et celui-ci se bloque à nouveau. L'impédance de sortie
du générateur, à cet instant, devient très grande. Ici, le commutateur doit donc être vu comme
une résistance dont la valeur varie spontanément dans le temps, non pas par la volonté de
l'utilisateur, mais en conséquence de conditions électriques particulières.

68
Le dispositif expérimental a été modélisé par la méthode décrite plus haut selon la
structure montrée figure III-5. E est la tension continue aux bornes du commutateur, fournie
par l'alimentation, qui est égale à 500 volts étant donné le pont diviseur constitué par les 4
résistances de 1 MΩ dans le dispositif expérimental (cf. figure III-4). La lame avant a été
intégrée au modèle par l'ajout d'une interface supplémentaire et l'analyse des ondes
acoustiques s'y réfléchissant, de la même manière que précédemment. La résistance R(t),
fonction du temps, décrit l'état du commutateur. Sa loi de variation a été déterminée
expérimentalement par le calcul du rapport de la tension à ses bornes et du courant le
traversant, préalablement mesurés.
Figure III-5 : Structure du modèle pour l'exemple proposé.
4.2 Résultats
4.2.1 Loi R(t) décrivant l'état du commutateur
La loi de variation de l'état du commutateur déterminée expérimentalement est
montrée figure III-6. Au temps t = 0, le commutateur entre en conduction et sa résistance
chute à quelques dizaines d'ohms pendant environ 700 ns. Puis, le courant le traversant
devenant nul, le commutateur s'ouvre et sa résistance augmente progressivement. En quelques

69
centaines de nanosecondes, R(t) prend une valeur de l'ordre de 1 MΩ. Cette loi de variation de
R(t) au cours du temps a été injectée dans le modèle pour le calcul de la pression générée à la
surface du transducteur, du courant le traversant et de la tension à ses bornes.
0
10000
20000
30000
40000
50000
60000
0 0.5 1 1.5 2
t (µs)
Z S
witc
h (o
hm)
Figure III-6 : Loi R(t) de variation de l'état du commutateur.
4.2.2 Résultats de la modélisation
Les figures III-7a, III-7b et III-8 montrent respectivement la forme de la pression, du
courant et de la tension, déterminés expérimentalement et théoriquement. De plus, ces figures
donnent également les résultats qui sont théoriquement obtenus si R(t) est fixé à une valeur
faible (R(t) = 10 ohm pour t>0), c'est-à-dire si le commutateur n'est pas considéré comme un
élément variant dans le temps, comme le ferait un modèle classique, fréquentiel ou temporel.
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0 2 4 6 8 10
t (µs)
Pre
ssur
e (M
Pa)
meas.
sim.
const. R(t)
(a)
-1
0
1
2
3
4
5
6
7
8
9
0 0.5 1 1.5 2
t (µs)
I (A
)
meas.
sim.
const. R(t)
(b)
Figure III-7 : Résultats expérimentaux et théorique (modèle classique et modèle proposé) (a) pression générée à
la surface du transducteur (b) courant traversant le transducteur.
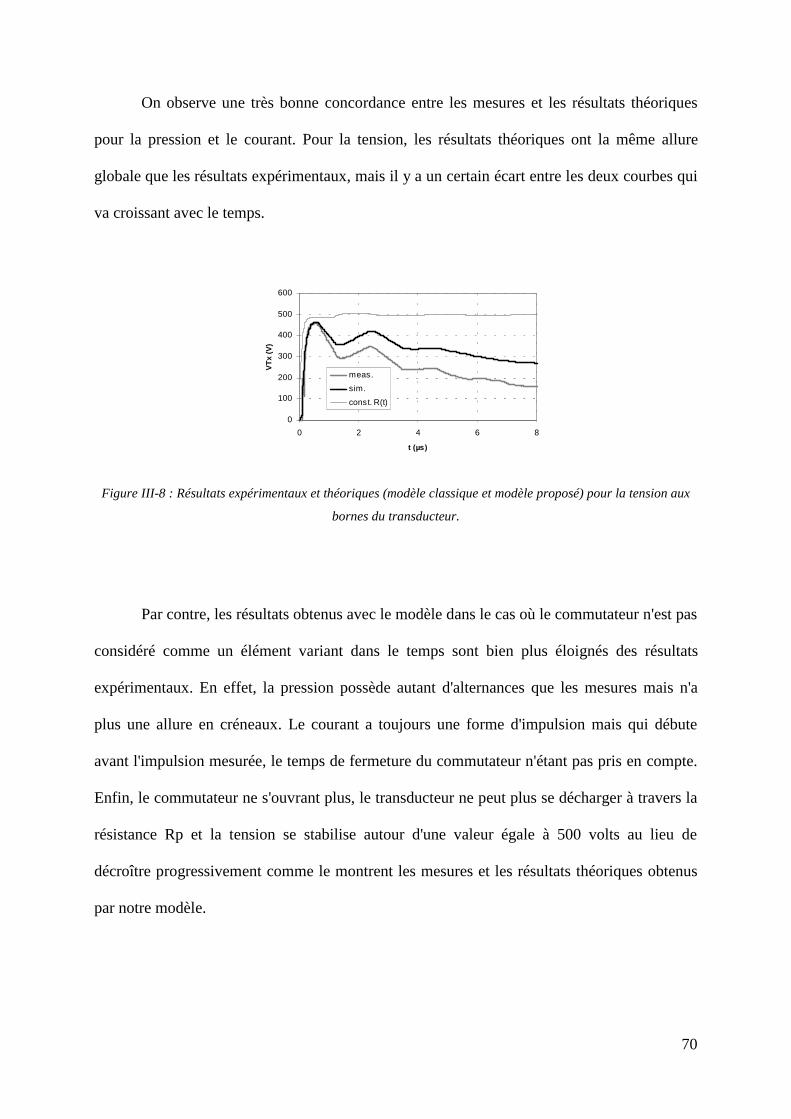
70
On observe une très bonne concordance entre les mesures et les résultats théoriques
pour la pression et le courant. Pour la tension, les résultats théoriques ont la même allure
globale que les résultats expérimentaux, mais il y a un certain écart entre les deux courbes qui
va croissant avec le temps.
0
100
200
300
400
500
600
0 2 4 6 8
t (µs)
VT
x (V
)
meas.
sim.
const. R(t)
Figure III-8 : Résultats expérimentaux et théoriques (modèle classique et modèle proposé) pour la tension aux
bornes du transducteur.
Par contre, les résultats obtenus avec le modèle dans le cas où le commutateur n'est pas
considéré comme un élément variant dans le temps sont bien plus éloignés des résultats
expérimentaux. En effet, la pression possède autant d'alternances que les mesures mais n'a
plus une allure en créneaux. Le courant a toujours une forme d'impulsion mais qui débute
avant l'impulsion mesurée, le temps de fermeture du commutateur n'étant pas pris en compte.
Enfin, le commutateur ne s'ouvrant plus, le transducteur ne peut plus se décharger à travers la
résistance Rp et la tension se stabilise autour d'une valeur égale à 500 volts au lieu de
décroître progressivement comme le montrent les mesures et les résultats théoriques obtenus
par notre modèle.
71
5 Discussion
La comparaison entre les mesures et les résultats théoriques obtenus grâce à un modèle
classique illustre bien l'erreur qui est commise lorsqu'on ne considère pas le commutateur
comme un élément variant dans le temps. Pour la pression, le courant et la tension, les
résultats sont très différents des résultats expérimentaux. Par contre, les résultats obtenus
grâce à la méthode proposée montrent un bon accord avec les mesures, en particulier pour la
pression et le courant.
Pour la tension, par contre, les courbes théoriques et expérimentales s'écartent l'une de
l'autre avec le temps, même si l'allure générale est la même pour les deux courbes. Cette
différence peut être due à un mode radial, important dans le type de céramique utilisé
(h31 = -6.8x108 V/m-1) et négligé par le modèle. En effet, lorsqu'on observe les courbes de
tension obtenues dans une fenêtre temporelle plus grande, on s'aperçoit que le signal mesuré
semble comporter une composante oscillatoire de plus que le signal théorique, à une
fréquence bien plus faible que la fréquence de résonance du transducteur, de l'ordre de 60
kHz. Cette composante pourrait être due à des ondes se propageant de manière radiale dans le
transducteur avec une fréquence plus faible qu'en mode épaisseur, étant donné le rapport entre
le diamètre et l'épaisseur du transducteur utilisé.
Afin de vérifier cette hypothèse, le modèle a été utilisé pour calculer la tension aux
bornes du transducteur et le courant dus au mode radial, en supposant les deux modes non
couplés, c'est-à-dire en négligeant tout déplacement dans le mode épaisseur. Pour ce faire, le
paramètre h33 a été remplacé par h31, la constante piézo-électrique en mode radial, et l'analyse
des réflexions des ondes au sein du transducteur a été adaptée pour s'appliquer à une
propagation radiale. Le pourtour du transducteur a été considéré comme baignant dans la
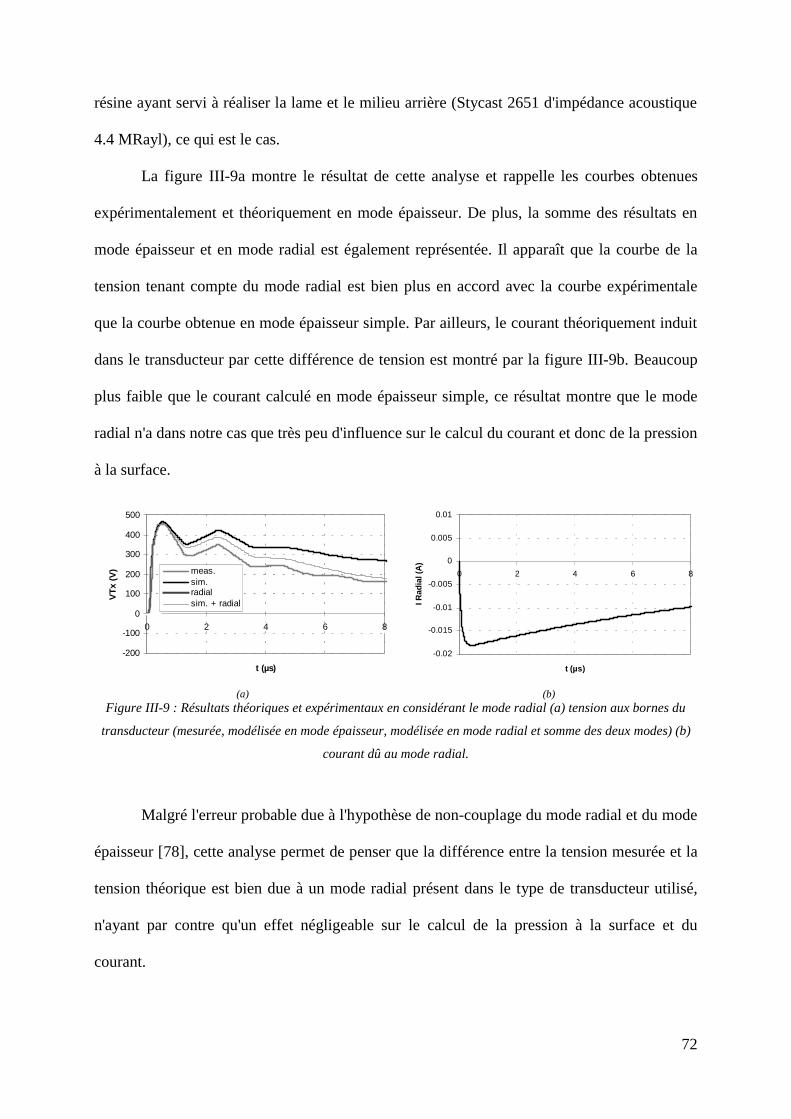
72
résine ayant servi à réaliser la lame et le milieu arrière (Stycast 2651 d'impédance acoustique
4.4 MRayl), ce qui est le cas.
La figure III-9a montre le résultat de cette analyse et rappelle les courbes obtenues
expérimentalement et théoriquement en mode épaisseur. De plus, la somme des résultats en
mode épaisseur et en mode radial est également représentée. Il apparaît que la courbe de la
tension tenant compte du mode radial est bien plus en accord avec la courbe expérimentale
que la courbe obtenue en mode épaisseur simple. Par ailleurs, le courant théoriquement induit
dans le transducteur par cette différence de tension est montré par la figure III-9b. Beaucoup
plus faible que le courant calculé en mode épaisseur simple, ce résultat montre que le mode
radial n'a dans notre cas que très peu d'influence sur le calcul du courant et donc de la pression
à la surface.
-200
-100
0
100
200
300
400
500
0 2 4 6 8
t (µs)
VT
x (V
) meas.sim.radialsim. + radial
(a)
-0.02
-0.015
-0.01
-0.005
0
0.005
0.01
0 2 4 6 8
t (µs)
I Rad
ial (
A)
(b)Figure III-9 : Résultats théoriques et expérimentaux en considérant le mode radial (a) tension aux bornes du
transducteur (mesurée, modélisée en mode épaisseur, modélisée en mode radial et somme des deux modes) (b)
courant dû au mode radial.
Malgré l'erreur probable due à l'hypothèse de non-couplage du mode radial et du mode
épaisseur [78], cette analyse permet de penser que la différence entre la tension mesurée et la
tension théorique est bien due à un mode radial présent dans le type de transducteur utilisé,
n'ayant par contre qu'un effet négligeable sur le calcul de la pression à la surface et du
courant.

73
L'étude qui a été menée montre finalement les conséquences importantes de la
présence d'éléments variant dans le temps dans un système d'excitation de transducteur piézo-
électrique sur les formes d'ondes, ainsi que la capacité de la méthode proposée à prendre en
compte de tels éléments. L'inconvénient majeur du modèle est sa faible souplesse d'utilisation.
En effet, la modification de la configuration électrique ou piézo-électrique du système (ajout
d'un composant électrique ou d'une couche d'adaptation supplémentaire par exemple) ne peut
se faire qu'en déterminant le nouvel ensemble des équations impliquées. C'est pourquoi une
perspective d'évolution importante du modèle est de développer l'analyse numérique de la
méthode dans le but d'obtenir un algorithme plus général et plus souple.
6 Conclusion
Une méthode temporelle de modélisation de la réponse d'un transducteur piézo-
électrique prenant en compte les éventuels éléments variant au cours du temps a été
développée. L'analyse d'un exemple courant et la comparaison entre résultats théoriques et
expérimentaux ont permis de souligner les conséquences de la présence de tels éléments sur
les formes d'ondes et l'aptitude du modèle à les prendre en compte. La méthode proposée est
applicable à n'importe quel élément dont le comportement varie dans le temps, qu'il soit
électrique ou acoustique. Elle constitue un outil efficace pour la prédiction du comportement
électroacoustique d'un système d'excitation de transducteurs basé sur la décharge capacitive
dans le but d'aider à la conception de tels systèmes électriques.

74
74
Chapitre 4 : Détermination expérimentale d'un matériau piézo-électrique
1 Introduction
Les générateurs piézo-électriques d'ondes de choc, comme il a été vu dans le chapitre
1, sont constitués de plusieurs centaines, voire plusieurs milliers, de transducteurs
ultrasonores élémentaires montés sur une coupole dont la forme permet la focalisation de
l'onde générée. Les dimensions de ces coupoles sont très élevées (environ 50 cm de diamètre)
en comparaison des générateurs électro-hydrauliques ou électromagnétiques (environ 20 cm
de diamètre). En effet, étant donné la faible pression de surface que les transducteurs piézo-
électriques sont capables de générer, il est nécessaire d'avoir une surface émettrice importante
pour pouvoir fragmenter les calculs. De nos jours, comme il a été vu dans l'introduction
générale, l'évolution des lithotriteurs et du marché de la lithotritie nécessite de réduire le
diamètre des générateurs piézo-électriques. Cette réduction n'est possible que si elle est
accompagnée d'une augmentation de la pression.
Cependant, il est impossible d'augmenter la pression générée à la surface des
matériaux céramiques qui sont utilisés couramment dans ce type d'application, en raison de
phénomènes de rupture liés à la superposition des contraintes mécaniques et électriques. Les
générateurs piézo-électriques en service actuellement ont été développés il y a une vingtaine
d'années environ et sont donc uniquement basés sur des céramiques connues à cette époque.
Depuis lors, un certain nombre de nouveaux matériaux sont apparus, mais ceux-ci n'ont
jamais été étudiés pour une application de génération d'ondes de choc, c'est-à-dire en
fonctionnement impulsionnel de forte puissance.

75
L'objectif de ce chapitre est d'identifier un matériau piézo-électrique capable de
générer les pressions les plus élevées possibles tout en supportant plusieurs millions de tirs,
afin de garantir une durée de vie satisfaisante. Il s'avère difficile de déterminer théoriquement
les mécanismes qui causent la rupture des matériaux lorsqu'ils sont soumis à de telles
contraintes mécaniques et électriques. C'est pourquoi une méthode expérimentale de
vieillissement à court terme des transducteurs fut adoptée, dans le but de classer différents
matériaux selon leur aptitude à générer de fortes pressions et à résister aux tirs.
Afin de comparer les différents matériaux entre eux, il est nécessaire de les exciter
avec les mêmes formes de tension électrique. Un mode d'excitation électrique commun à tous
les transducteurs testés a donc été conçu. Cette forme d'impulsion de référence a été appliquée
lors de tous les essais de vieillissement. Pour ce faire, un réseau de décharge capacitive
spécifique à chaque transducteur a été nécessaire, les différents matériaux n'ayant pas tous le
même comportement électrique.
2 L'excitation électrique des transducteurs
2.1 Introduction
Les éléments piézo-électriques qui équipent les lithotriteurs actuels sont généralement
adaptés électriquement à la fréquence de résonance et excités par décharge capacitive. L'onde
de pression résultante est fortement oscillatoire, présentant des alternances de pression
positives et négatives comme le montre l'exemple de la figure IV-1. Sa pseudo-période
correspond à la fréquence de résonance.

76
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
195 200 205 210
t (µs)
pres
sion
(M
Pa)
Figure IV-1 : Onde de pression générée à la surface d'un générateur piézo-électrique classique.
La modélisation de la pression au point focal d'une coupole piézo-électrique montre
que seule la première phase de compression générée à la surface contribue à la formation de
l'onde de choc au point focal [64, 65]. Les oscillations suivantes disparaissent en raison de la
cavitation due à la phase de détente suivant la première phase de compression. Au sein d'un
générateur d'onde de choc, les transducteurs piézo-électriques ne doivent donc idéalement
générer qu'une seule arche de compression, c'est-à-dire une onde unipolaire. Les éventuelles
alternances suivantes ne participeraient d'aucune façon à la formation de l'onde de choc et
seraient à l'origine de contraintes mécaniques et électriques fatiguant inutilement le
transducteur. C'est pourquoi un nouveau mode d'excitation des transducteurs a été développé
de manière à générer une onde unipolaire de forte puissance.
2.2 Principe
Soit un transducteur d'impédance acoustique ZT et dont les milieux arrière et de
propagation ont des impédances acoustiques ZB et ZL. Lorsqu'on applique un Dirac de tension
δ aux bornes du transducteur, quatre impulsions acoustiques apparaissent aux deux interfaces
(figure IV-2).
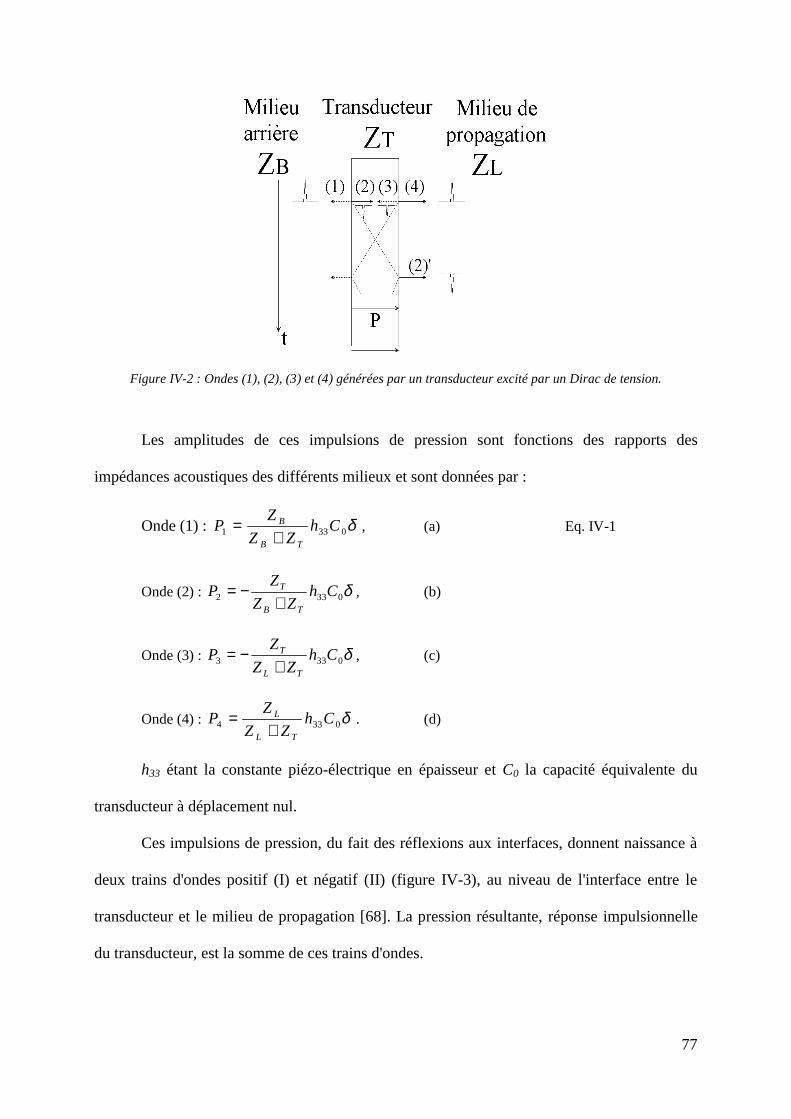
77
Figure IV-2 : Ondes (1), (2), (3) et (4) générées par un transducteur excité par un Dirac de tension.
Les amplitudes de ces impulsions de pression sont fonctions des rapports des
impédances acoustiques des différents milieux et sont données par :
Onde (1) : δ0331 ChZZ
ZP
TB
B
+= , (a) Eq. IV-1
Onde (2) : δ0332 ChZZ
ZP
TB
T
+−= , (b)
Onde (3) : δ0333 ChZZ
ZP
TL
T
+−= , (c)
Onde (4) : δ0334 ChZZ
ZP
TL
L
+= . (d)
h33 étant la constante piézo-électrique en épaisseur et C0 la capacité équivalente du
transducteur à déplacement nul.
Ces impulsions de pression, du fait des réflexions aux interfaces, donnent naissance à
deux trains d'ondes positif (I) et négatif (II) (figure IV-3), au niveau de l'interface entre le
transducteur et le milieu de propagation [68]. La pression résultante, réponse impulsionnelle
du transducteur, est la somme de ces trains d'ondes.

78
Figure IV-3 : Trains d'ondes positif (I) et négatif (II) résultant à l'interface transducteur-charge lorsque le
transducteur est excité par un dirac de tension, avec les coefficients de réflexion LT
LTL ZZ
ZZr
+−
= ,
BT
BTB ZZ
ZZr
+−
= , et T le temps de vol des ultrasons.
Dans le but de générer une onde de pression unipolaire, le transducteur est équipé d'un
milieu arrière dont l'impédance acoustique est égale à celle du transducteur (ZB = ZT). Dans ce
cas, il apparaît que 0=Br et donc seules les premières impulsions de chaque train d'ondes
sont observées dans le milieu de propagation. Par ailleurs, ces impulsions sont identiques en
amplitudes et de signes opposés. Aux bornes du transducteur, on impose une rampe de tension
dont le temps de montée est égal au temps de vol des ultrasons T donné par :
33v
eT = , Eq. IV-2
avec e l'épaisseur du transducteur et 33v la célérité des ultrasons en mode épaisseur.
La pression résultante, qui est obtenue par convolution de la rampe de tension et de la
réponse impulsionnelle, est une onde unipolaire de durée 2xT (figure IV-4).
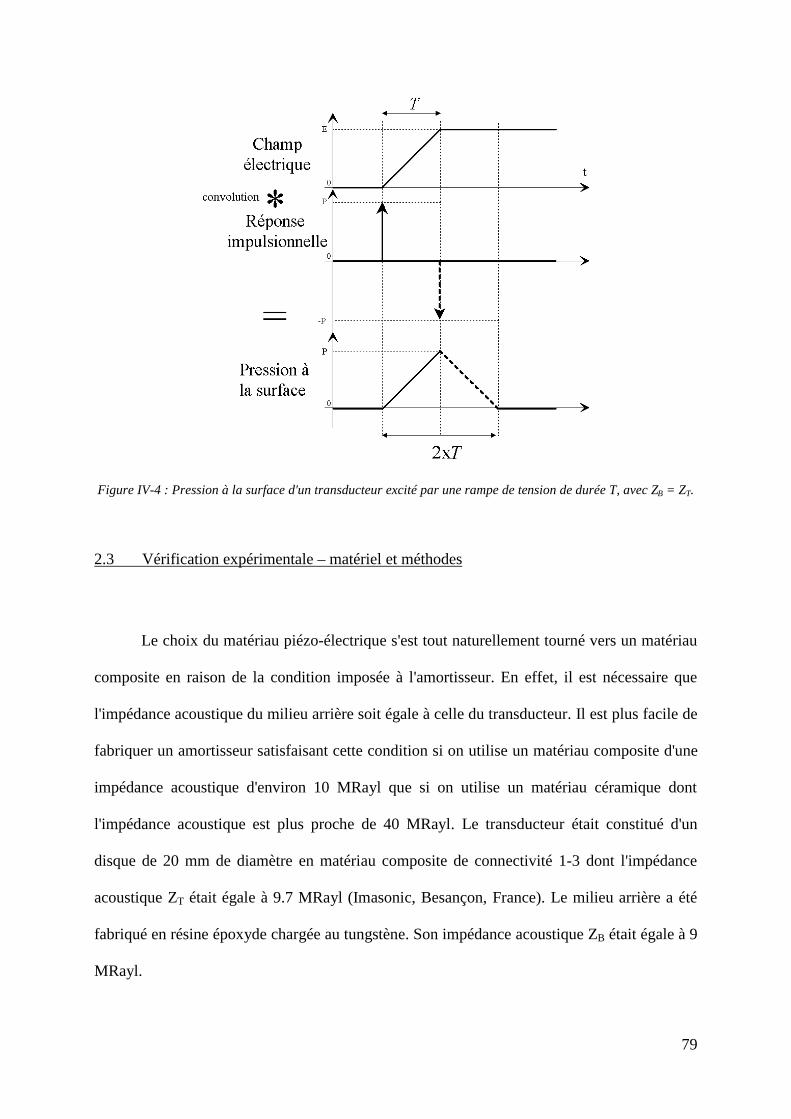
79
Figure IV-4 : Pression à la surface d'un transducteur excité par une rampe de tension de durée T, avec ZB = ZT.
2.3 Vérification expérimentale – matériel et méthodes
Le choix du matériau piézo-électrique s'est tout naturellement tourné vers un matériau
composite en raison de la condition imposée à l'amortisseur. En effet, il est nécessaire que
l'impédance acoustique du milieu arrière soit égale à celle du transducteur. Il est plus facile de
fabriquer un amortisseur satisfaisant cette condition si on utilise un matériau composite d'une
impédance acoustique d'environ 10 MRayl que si on utilise un matériau céramique dont
l'impédance acoustique est plus proche de 40 MRayl. Le transducteur était constitué d'un
disque de 20 mm de diamètre en matériau composite de connectivité 1-3 dont l'impédance
acoustique ZT était égale à 9.7 MRayl (Imasonic, Besançon, France). Le milieu arrière a été
fabriqué en résine époxyde chargée au tungstène. Son impédance acoustique ZB était égale à 9
MRayl.
80
Pour pouvoir appliquer une rampe de tension parfaite aux bornes du transducteur, qui
peut être vu d'un point de vue électrique comme un condensateur, il est nécessaire de disposer
d'un générateur de rampe de très faible impédance de sortie. Dans le cas contraire,
l'impédance de sortie du générateur associée à la capacité du transducteur fait que la tension
ne croît pas de manière linéaire mais exponentielle. Ne disposant pas d'un tel générateur au
laboratoire, un compromis a dû être trouvé. Deux types d'essais ont été menés : l'un en basse
tension avec un générateur de 50 Ω d'impédance de sortie, le second en haute tension à l'aide
d'un montage qui sera détaillé plus loin et dont l'impédance de sortie est plus élevée.
En basse tension, le transducteur utilisé avait une épaisseur de 1.7 mm correspondant à
une fréquence de résonance de 1 MHz. Le temps de vol des ultrasons T était égal à 500 ns.
Une rampe de tension de 32 volts d'amplitude était fournie par un générateur de signaux HP
8112A (Hewlett Packard GmbH, Allemagne). En haute tension, le transducteur utilisé avait
une épaisseur de 2,4 mm, soit une fréquence de résonance de 720 kHz (T = 694 ns). Un
système d'excitation par décharge capacitive a été utilisé pour appliquer une tension proche
d'une rampe (figure IV-5). Le condensateur de 10 nF était chargé sous 4 kV par une
alimentation haute tension 205A-03R (Berton Associates, Inc., USA). Lorsque la conduction
du transistor MOS HTS-8109 8kV/90A (Behlke GmbH, Allemagne) était commandée, le
condensateur se déchargeait dans le transducteur à travers une résistance série de 200 Ω. La
tension aux bornes du transducteur présentait alors une décroissance exponentielle dont la
forme était proche d'une rampe négative d'amplitude 3.8 kV. Au temps t = T, la réouverture
du transistor était commandée et le transducteur se déchargeait à travers la résistance de 15
kΩ. Durant cette phase, la tension aux bornes du transducteur croissait lentement pour revenir
à une valeur nulle. Puisque la rampe générée est négative, elle a été appliquée dans le sens
inverse de la polarisation du transducteur afin que le champ électrique en son sein soit positif.

81
Figure IV-5 : Montage expérimental permettant l'excitation du transducteur par une rampe de haute tension.
Les mesures de haute tension ont été réalisées à l'aide d'une sonde P6015A reliée à un
oscilloscope TDS 520 (Tektronix, USA). La pression a été mesurée dans l'huile de ricin par
un hydrophone aiguille PZT-Z44-0400 (SEA, Socquel, USA) d'une sensibilité de 16 MPa/V,
placé dans l'axe du transducteur et proche de sa surface.
2.4 Résultats et discussion
Comme le montre la figure IV-6a, la tension aux bornes du transducteur durant l'essai
basse tension est bien proche d'une rampe de 500 ns environ et 32 volts d'amplitude.
Néanmoins, l'influence de l'impédance de sortie du générateur, qui constitue avec le
transducteur un circuit RC, est très sensible puisque les variations brutales de la tension sont
amorties, au début et à la fin de la rampe. Malgré cette distorsion, la réponse de l'hydrophone
à cette excitation (figure IV-6b) témoigne de la génération d'une onde de pression à la surface
du transducteur qui est bien unipolaire, hormis quelques très légères oscillations à la fin de
l'impulsion. Cette onde a une durée de 1 µs, qui est égale au double du temps de vol de ce
transducteur, comme prévu. L'amplitude du signal est de 0.88 mV, soit une amplitude en
pression de 14 kPa.

82
-20
-15
-10
-5
0
5
10
15
20
0 0.5 1 1.5 2 2.5 3 3.5 4
t (µs)
VT
x (V
)
(a)
-0.2
0
0.2
0.4
0.6
0.8
1
0 0.5 1 1.5 2 2.5 3 3.5 4
t (µs)
répo
nse
hydr
opho
ne (
mV
)
(b)
Figure IV-6 : Résultats de l'essai basse tension : (a) tension aux bornes du transducteur (b) réponse de
l'hydrophone.
-4.5
-4-3.5
-3
-2.5-2
-1.5
-1
-0.50
0.5
0 1 2 3 4
t (µs)
VT
r (k
V)
(a)
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
1 1.5 2 2.5 3 3.5 4
t (µs)
pres
sion
(M
Pa)
(b)
Figure IV-7 : Résultats de l'essai haute tension : (a) tension aux bornes du transducteur (b) pression générée à
la surface.
La forme de la tension appliquée au transducteur 720 kHz par le générateur haute
tension est donnée par la figure IV-7a. Ici, la conduction du transducteur MOS a été
commandée pendant une durée de 694 ns égal au temps de vol des ultrasons pour ce
transducteur. Durant cette phase de conduction, la tension est proche d'une rampe négative
subissant tout de même une forte distorsion du fait du réseau RC constitué par la résistance de
200 Ω et le transducteur. Puis, le transistor se bloque et le transducteur se décharge lentement
dans la résistance de 15 kΩ. Bien que la forme de tension appliquée aux bornes du
transducteur soit beaucoup moins proche d'une rampe idéale que lors de l'essai basse tension,
la pression (figure IV-7b) est bien unipolaire, exceptées quelques oscillations de faible
amplitude à la fin de l'impulsion. La durée de l'onde est de 1.3 µs, ce qui est proche du double
du temps de vol des ultrasons (1.39 µs). L'impulsion atteint une amplitude de 3 MPa.

83
Un transducteur piézo-électrique électriquement adapté à sa fréquence de résonance f
et excité par décharge capacitive, de manière classique, délivre une première impulsion
positive de pression dont la durée est égale au temps de vol des ultrasons f
T⋅
=2
1. Grâce à
la méthode proposée, le même transducteur est capable de générer une impulsion dont la
durée est f
T1
2 =⋅ . Ainsi, une impulsion de durée d fixée sera générée par la méthode
classique avec un transducteur résonant à une fréquence de d⋅2
1. Par la méthode proposée,
une impulsion de même durée sera obtenue avec un transducteur résonant à une fréquence de
d
1, c'est-à-dire deux fois plus fin. Etant donné que la pression générée est fonction du champ
électrique, la génération d'une onde de pression d'amplitude P nécessitera une tension
électrique deux fois plus faible grâce au mode d'excitation présenté, par rapport à une
méthode classique. De même, l'application d'une tension d'amplitude V aux bornes d'un
transducteur donnera une pression deux fois plus élevée grâce au mode d'excitation par une
rampe de tension.
2.5 Conclusion
Ces essais à basse et haute tension montrent que le mode d'excitation des transducteurs
qui a été présenté est efficace pour la génération d'ondes unipolaires de fortes puissances.
Bien que l'impédance de sortie des générateurs utilisés n'a pas permis d'appliquer des rampes
de tension idéales aux bornes du transducteur, celui-ci a tout de même généré à sa surface des
ondes de pression quasi unipolaires atteignant une amplitude de 3 MPa.
84
Tout au long du travail qui est présenté dans ce chapitre et dans les chapitres suivant,
l'excitation des transducteurs a été conforme à ce principe. Il est néanmoins à noter que tous
les transducteurs utilisés dans ces études n'étaient pas tous pourvus d'un milieu arrière dont
l'impédance acoustique était proche de celle du transducteur. Ainsi, même excités par une
rampe de tension, la pression générée à leur surface n'était pas unipolaire. Néanmoins, dans
un souci d'homogénéité, la tension qui a été appliquée aux bornes de ces transducteurs a
toujours été, autant que possible, proche d'une rampe dont la durée était égale au temps de vol
des ultrasons.
3 Matériel
Deux types de matériaux ont été testés : des matériaux piézo-céramiques et des
matériaux piézo-composites. En effet, une étude précédente a montré que les piézo-
composites pouvaient être utilisés pour la génération d'ondes de choc [52, 79]. L'utilisation de
ce type de matériau se répand largement depuis quelques années lors de l'utilisation des
ultrasons à des fins de thérapie [80].
3.1 Matériaux testés
Cinq matériaux PZT ont été testés, quatre céramiques tendres (P1-60, P1-88, P1-91 et
P1-94) et une dure (P7-62) (Quartz & Silice, Nemours, France). Les caractéristiques
électromécaniques de ces matériaux sont donnés par la table IV-1.

85
P7-62 P1-60 P1-88 P1-91 P1-94
Navy Type I II II modifié VI non classé
N3t (Hz/mm) 2050 1870 2020 2000 2000
ρ (kg.m-3) 7550 7550 7700 7410 7900
ZT (MRayl) 31 28.2 31.1 29.6 31.6
kt 0.47 0.49 0.49 0.49 0.5
ε33S/ε0 690 870 837 1461 2230
C33D (N.m-1) 12,7e10 10,6e10 12,5e10 11,9e10 12,6e10
h33 (V.m) 21,4e10 18,1e10 20,2e10 14,8e10 12,7e10
Table IV-1 : Caractéristiques électromécaniques des matériaux piézo-céramiques.
Trois matériaux piézo-composites ont également été testés : IMA021, IMA022 et
IMA023 (Imasonic, Besançon, France) que nous appelons respectivement A, B et C. Ces
matériaux sont de connectivité 1-3, avec une répartition aléatoire des barreaux de céramique.
Les caractéristiques de ces matériaux sont donnés par la table IV-2.
A B C
N3t (Hz/mm) 1846 1640 1680
ρ (kg.m-3) 2895 2895 2895
ZT (MRayl) 10,7 9,5 9,7
kt 0,59 0,55 0,56
ε33S/ε0 194 816 749
C33D (N.m-1) 3,95e10 3,11e10 3,27e10
h33 (V.m) 23,3e8 11,4e8 12,5e8
Table IV-2 : Caractéristiques électromécaniques des matériaux piézo-composites.
3.2 Epaisseur des transducteurs
Les générateurs piézo-électriques fonctionnent généralement avec des transducteurs
ayant une fréquence de résonance de l'ordre de quelques centaines de kHz [51, 52]. Il a été vu
que l'excitation par une rampe de tension permettait de générer une impulsion de pression

86
dont la durée est le double du temps de vol des ultrasons. Ainsi, l'épaisseur du transducteur est
donné par 4
λ=e , avec λ la longueur d'onde associée au fondamental de l'onde unipolaire.
3.3 Générateur d'impulsions électriques
Les transducteurs ont été excités par décharge capacitive, comme le montre le schéma
du montage électrique (Figure IV-8). La commutation est réalisée par un éclateur à gaz
(spark-gap) GP-46B (EG&G, USA) travaillant entre 8 kV et 20 kV. Le circuit de commande
de l'éclateur, constitué d'une résistance de 1 MΩ, d'un condensateur de 470 pF, d'un
transformateur d'impulsion et d'une carte trigger qui déclenche la conduction avec une
fréquence de répétition de 8 Hz. Tant que le commutateur reste ouvert, le condensateur C est
chargé par l'alimentation haute tension HCN 600KN 0-20kV (Fug, USA) à travers la
résistance de 14 MΩ. Lorsqu'il devient conducteur, C se décharge brusquement dans le
transducteur à travers une résistance et une self.
O
A
T
TR IG G E R
0 V
H V
C 2 = 470p F
14 M O h m
1 M O h m
C
15 kO h m
R
L
Tran sd u c teur
Spark Gap
V Tr
Figure IV-8 : Générateur électrique à spark-gap.

87
Il est à noter que les composants C, R et L sont déterminés pour un transducteur et un
niveau de fonctionnement donnés. En effet, puisque l'éclateur à gaz ne peut pas fonctionner à
des tensions inférieures à 8 kV, il est impossible d'exciter directement le transducteur avec des
tensions plus faibles. Le condensateur C constituant un pont capacitif avec le transducteur, on
ajuste la tension aux bornes du transducteur VTr en choisissant convenablement la valeur de
la capacité C. Dans une première approximation, cette valeur dépend de la valeur de la
capacité équivalente du transducteur C0 à effort constant :
e
SC T ⋅= 330 ε , Eq. IV-3
avec T33ε la permittivité à effort constant, S la surface active du transducteur et e son
épaisseur.
La capacité C est donnée par :
0CVTrE
VTrC
−= Eq. IV-4
avec E la tension d'alimentation comprise entre 8 et 20 kV. La capacité C est donc
déterminée à la fois par le transducteur et par le niveau de fonctionnement VTr désiré. C'est
grâce à la résistance R et à la self L qu'on approche d'une manière satisfaisante une rampe de
tension de durée T. R est choisie pour que la constante de temps soit égale à T.
On a donc : TCC
0
0
CCR
+= Eq. IV-5
Enfin, la self L est choisie pour que l'amortissement soit critique :
)(4 0
02
CC
CCRL
+= Eq. IV-6
Ainsi, les valeurs de C, R et L sont estimées en faisant l'hypothèse que le transducteur
est équivalent, du point de vue électrique, à un condensateur. Par ailleurs, les valeurs des
composants ainsi déterminées ne sont pas forcément disponibles dans le commerce et
88
nécessitent donc d'être ajustées. C'est pourquoi un modèle informatique du transducteur piézo-
électrique, présenté dans le chapitre 3, a été utilisé afin de déterminer théoriquement le réseau
RLC, par essais successifs à partir des valeurs calculées grâce aux équations IV-4 à IV-6.
Cette méthode est basée sur le modèle de la figure III-2, avec en plus une résistance de 15 kΩ
en parallèle sur le transducteur et une capacité série qui constitue avec le transducteur un pont
capacitif. Etant donné que les éclateurs à gaz restent conducteurs pendant des durées très
longues, il n'a pas été utile d'intégrer de composant variant avec le temps dans ce modèle.
A titre d'exemple, considérons que l'on souhaite tester un transducteur en composite B
résonant à 720 kHz etgénérant une pression de 4 MPa à sa surface, en appliquant sur le
montage une tension kVE 11= . Comme nous le verrons plus loin, une estimation de la valeur
de la tension VTr à appliquer aux bornes du transducteur peut être donnée. Celle-ci est
fonction des propriétés électroacoustiques du transducteur, de ses dimensions et des divers
milieux de propagation. Admettons pour l'instant que cette valeur est égale à kVVTr 5,6= ,
que le transducteur a une capacité équivalente à effort constant nFC 20 = et que le temps de
vol est de 700 ns. Dans ce cas, les valeurs de C, R et L calculées grâce aux équations IV-4 à
IV-6 sont nFC 88,2= , Ω= 592R et µHL 103= . Une simulation réalisée à partir de ces
valeurs, grâce au modèle du chapitre III, a permis de choisir les valeurs suivantes :
nFC 5,2= , Ω= 1750R et µHL 77= . Les résultats de cette simulation sont donnés par la
figure IV-9.

89
0
1
2
3
4
5
6
7
8
9
0 1 2 3 4 5 6
t (µs)
VT
r (k
V)
(a)
-2
-1
0
1
2
3
4
5
0 1 2 3 4 5 6
t (µs)
Pre
ssio
n (M
Pa)
(b)
Figure IV-9 : Résultat de la simulation pour l'exemple donné : tension aux bornes du transducteur (a) et
pression générée à sa surface (b).
Le signal de tension (figure IV-9a) débute par une rampe de durée 700 ns environ et de
6 kV d'amplitude, ce qui est un peu plus faible que la valeur approchée initiale, égale à 6.5
kV. L'onde de pression (figure IV-9b) a bien une amplitude de 4 MPa. Elle n'est pas
unipolaire en raison de l'absence d'amortisseur, mais les oscillations sont limitées.
3.4 Montage mécanique des transducteurs et mesures de pression
Les transducteurs ont été testés sous la forme de disques de 20 mm de diamètre. Un
montage mécanique simple a été utilisé afin de tester facilement les différents transducteurs.
Ce montage (figure IV-10) assure la connexion électrique du transducteur avec une
reproductibilité bien meilleure que la soudure à la main, et garanti également un apport du
courant plus homogène. Il permet de tester tous les transducteurs dans les mêmes conditions
mécaniques et électriques. De plus, l'assemblage mécanique est très rapide. Le transducteur
est serré entre deux ressorts toroïdaux (Bal Seal, Pays-Bas) par deux anneaux de laiton dans
un support en PVC. Un anneau de Nylon permet de maintenir le transducteur au centre du
montage. Le courant électrique traverse les anneaux de laiton et les ressorts. Le transducteur,
monté sans lame ni amortisseur, est plongé dans une cuve d'huile de ricin. L'huile de ricin
présente une excellente rigidité diélectrique (65 kV/mm) [81] et une impédance acoustique
90
égale à celle de l'eau. L'absence d'amortisseur fait que la pression à la surface du transducteur
n'est pas unipolaire bien que l'excitation électrique soit proche d'une rampe de tension. Les
mesures de pression ont été effectuées grâce à un hydrophone aiguille PZT-Z44-0400 (SEA,
USA) placé en face du centre du transducteur. L'hydrophone est relié à un oscilloscope
TDS520 (Tektronix, USA).
Figure IV-10 : Amenée de courant et montage mécanique des transducteurs.
4 Méthodes
4.1 Etude de la tenue en tension des différents matériaux
Les matériaux piézo-céramiques et piézo-composites présentés plus haut ont
respectivement des fréquences de résonance mécanique de 1 MHz et de 720 kHz permettant
de générer, dans des conditions optimales d'excitation et de milieu arrière, des ondes
unipolaires de durée respectives 1µs et 1.4µs. Il s'agit d'un matériel dont disposait en grandes
quantités le laboratoire. Les transducteurs composites ont des électrodes en cuivre. Les
transducteurs céramiques ont des électrodes en argent. Le tableau IV-3 donne les
caractéristiques électroacoustiques des transducteurs céramiques et composites. En première
91
approximation le rapport de la pression générée sur la tension d'excitation est donné par la
relation [71] :
03333
2Ch
ZZ
Z
e
kTZK
LT
LS
tLLe ⋅⋅
+==
ρε
Eq. IV-7
avec TL le coefficient de transmission, kt la constante de couplage, S33ε la permittivité à
déformation nulle, h33 la constante piézo-électrique en mode épaisseur et C0 la capacité
équivalente du transducteur à déformation constante.
P7-62 P1-60 P1-88 P1-91 P1-94 A B C
épaisseur (mm) 2,05 1,87 2,02 2 2 2,56 2,28 2,33
C0 (nF) 0,94 1,3 1,15 2,03 3,1 0,21 1 0,89
Ke (MPa/V) 0,29 0,37 0,34 0,46 0,56 0,23 0,49 0,47
Table IV-3 : Caractéristiques électroacoustiques des transducteurs céramiques et composites.
Chaque essai a été réalisé trois fois consécutivement sur trois transducteurs identiques.
Dans le but de déterminer la tenue des transducteurs et également leur limite de
fonctionnement, le protocole expérimental suivant a été adopté. Tout d'abord, le circuit de
décharge est réglé de manière à ce que le transducteur à tester génère 1 MPa à sa surface. Il
est à noter que dans notre application, on ne considère que l’amplitude de la première arche de
l’onde de pression qui est, comme il a été dit précédemment, la seule composante de l’onde à
participer à la formation de l’onde de choc. Puis on excite le transducteur pendant 100 000
tirs. Si le transducteur fonctionne toujours à la fin de cette période, le circuit de décharge est
modifié de manière à générer 1.5 MPa pour 100 000 autres tirs. De 0.5 MPa en 0.5 MPa, la
pression est augmentée et le transducteur subit 100 000 chocs à chaque fois, jusqu'à sa
rupture. La pression de fonctionnement du transducteur au moment de la rupture est relevée.
Elle est assimilée dans le cadre de notre étude à la limite de fonctionnement. Bien
évidemment, ce protocole ne correspond pas exactement au vieillissement des transducteurs

92
dans le contexte d'un générateur d'ondes de choc. Il permet néanmoins de comparer les tenues
des différents transducteurs à tester entre eux puisque les conditions expérimentales sont les
mêmes pour chacun d'eux.
4.2 Distribution de la pression à la surface des transducteurs
Une mesure du champ ultrasonore généré par un matériau composite B résonant à une
fréquence de 720 kHz et un matériau céramique P1-94 résonant à une fréquence de 1 MHz a
été réalisée. Nous avons repris pour cela le matériel utilisé pour les essais de vieillissement de
la partie 4.1. L’hydrophone est placé à une distance de 7.5 mm par rapport à la surface du
transducteur. Deux micromanipulateurs permettent de déplacer l’hydrophone dans un plan
parallèle à la surface du transducteur. Pour chacun des deux transducteurs, on règle le circuit
de décharge électrique de manière à générer une onde de pression dont la première arche a
une amplitude de 0.5 MPa. On effectue des enregistrements de la forme d’onde en divers
points du plan de déplacement de l’hydrophone. Les enregistrements, normalisés par rapport
au maximum de la première arche de pression, sont obtenus grâce à un ordinateur relié à
l’oscilloscope par l’intermédiaire d’une carte IEEE.
4.3 Etude de la tenue en tension pour 2 fréquences de résonance différentes
Des transducteurs céramiques P1-88 résonant à une fréquence de 500 kHz et de 1
MHz ont été testés afin d'étudier l'importance de l'épaisseur. La tenue en tension de cinq
transducteurs de chaque type a été étudiée. Ces transducteurs sont des disques de diamètre 20
mm, de 4.04 mm d'épaisseur pour les 500 kHz et de 2.02 mm d'épaisseur pour les 1 MHz
(Quartz & Silice).
93
4.4 Influence des modes latéraux
Il est possible que le mode latéral ou radial soit un facteur de rupture des
transducteurs. En utilisant des transducteurs circulaires, les ondes radiales se focalisent au
centre de la céramique, créant une contrainte importante. Par contre, dans le cas de
transducteurs rectangulaires, cette focalisation du mode latéral est fortement réduite. C'est
pourquoi des transducteurs céramiques rectangulaires sont également testés afin de vérifier
l'importance des modes latéraux dans la rupture des céramiques. La surface de ces
transducteurs est égale à la surface des transducteurs circulaires. Les matériaux testés sous
cette forme sont des P7-62, P1-88, P1-91 et P1-94 (Quartz & Silice). Cette étude n'est pas
réalisée sur des transducteurs composites pour lesquels les modes latéraux sont très faibles
[82]. Trois transducteurs de chaque type ont été testés.
5 Résultats
5.1 Etude de la tenue en tension des différents matériaux
Les résultats des essais réalisés sur les céramiques circulaires résonant à 1 MHz et les
composites circulaires résonant à 720 kHz sont donnés par la Figure IV-11.
Le matériau céramique le plus résistant à nos essais de vieillissement est la céramique
dure, le P7-62, avec une limite à 2,5 MPa en moyenne. Les P1-88, P1-91 et P1-94 cassent
tous entre 1.5 et 2 MPa, tandis que le P1-60 casse entre 2 et 2,5 MPa.

94
0
1
2
3
4
5
6
P7-62 P1-60 P1-88 P1-91 P1-94 A B C
Matériau
pres
sion
de
rupt
ure
(Mpa
) Transducteur 1
Transducteur 2
Transducteur 3
Figure IV-11 : Pression de rupture des matériaux céramiques et composites.
Les composites sont nettement supérieurs aux céramiques, puisque le plus résistant des
matériaux céramiques casse à 2,5 MPa en moyenne, alors que le plus faible des matériaux
composites casse à 3.8 MPa.
Les matériaux composites cassent pour des pressions comprises entre 3 et 5 MPa. Le
matériau B présente une limite à 4.7 MPa en moyenne. La limite moyenne du matériau C est
de 4 MPa, celle du matériau A est de 3.8 MPa. Bien que la différence entre les trois types de
matériaux composites soit peu significative du point de vue de la limite en pression, les
matériaux B et C présentent l'avantage d'avoir une sensibilité largement supérieure à celle du
matériau A (table IV-3). La tension électrique nécessaire à la génération d'une onde de
pression d'amplitude donnée est beaucoup plus faible pour ces deux matériaux.
On constate une différence majeure entre les limites de fonctionnement des
transducteurs céramiques et composites (figure IV-12). Alors que les céramiques cassent en
plusieurs morceaux (figure IV-12a), les composites sont détruits par des amorçages
électriques entre les électrodes, généralement à travers la phase polymère. Sur la figure IV-
12b, on peut voir la surface métallisée d'un transducteur composite après la rupture.
L'amorçage électrique a créé un trou a travers le transducteur (à droite) et a enlevé une grande
surface de cuivre, laissant apparaître plusieurs barreaux céramiques, de couleur blanche. On

95
observe généralement sur les composites détruits un mauvais état des électrodes en cuivre. En
effet, en certains endroits des petits morceaux de cuivre se sont détachés du transducteur,
comme le souligne la flèche blanche sur la figure IV-12b.
(a) (b)
Figure IV-12 : Différence entre la rupture d'un matériau céramique (a) et d'un matériau composite (b).
5.2 Distribution de la pression à la surface des transducteurs
Les formes d'ondes de pression, après normalisation, mesurées avec le transducteur
céramique P1-94 et le transducteur composite B sont donnés par la Figure IV-13. Pour chaque
transducteur, 3 enregistrements sont représentés, l’un effectué face au centre, le deuxième à
une distance de 3 mm du centre et le troisième à une distance de 5 mm du centre dans la
même direction. Pour le transducteur composite, les trois enregistrements sont très proches.
Pour le transducteur céramique, les trois enregistrements sont très différents. Bien que la
première arche de pression soit la même sur tous les enregistrements, le reste de l’onde varie
énormément selon la position du capteur de pression.

96
-3
-2.5
-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 2 4 6 8 10
t (µs)
pres
sion
nor
mal
isée
centre
3 mm
5 mm
(a)
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
0 2 4 6 8 10
t (µs)
pres
sion
nor
mal
isée
centre
3 mm
5 mm
(b)
Figure IV-13 : Onde de pression mesurée face au centre du transducteur, puis à 3 mm et à 5 mm dans la même
direction, pour un matériau céramique (a) et un matériau composite (b).
5.3 Etude de la tenue en tension pour 2 fréquences de résonance différentes
Pour les céramiques P1-88 1 MHz, 3 transducteurs ont cassé à 1.5 MPa et 2
transducteurs à 2 MPa. Pour les céramiques 500 kHz, 2 transducteurs ont cassé à 1.5 MPa et
les trois autres à 2 MPa. Dans les deux cas, la limite de fonctionnement des transducteurs se
situe donc entre 1.5 et 2 MPa. Les moyennes des résultats obtenus dans chaque cas ainsi que
les écart-types sont donnés par la Figure IV-14. Dans les deux cas, l’écart-type est faible
devant le pas de 0.5 MPa de nos essais de tenue en tension et les moyennes sont très proches.
0
0.5
1
1.5
2
2.5
500 kHz 1 MHz
fréquence de résonance
pres
sion
de
rupt
ure
moy
enne
(M
Pa)
Figure IV-14 : Pressions de rupture moyennes d'une céramique P1-88 pour 2 fréquences de résonance.
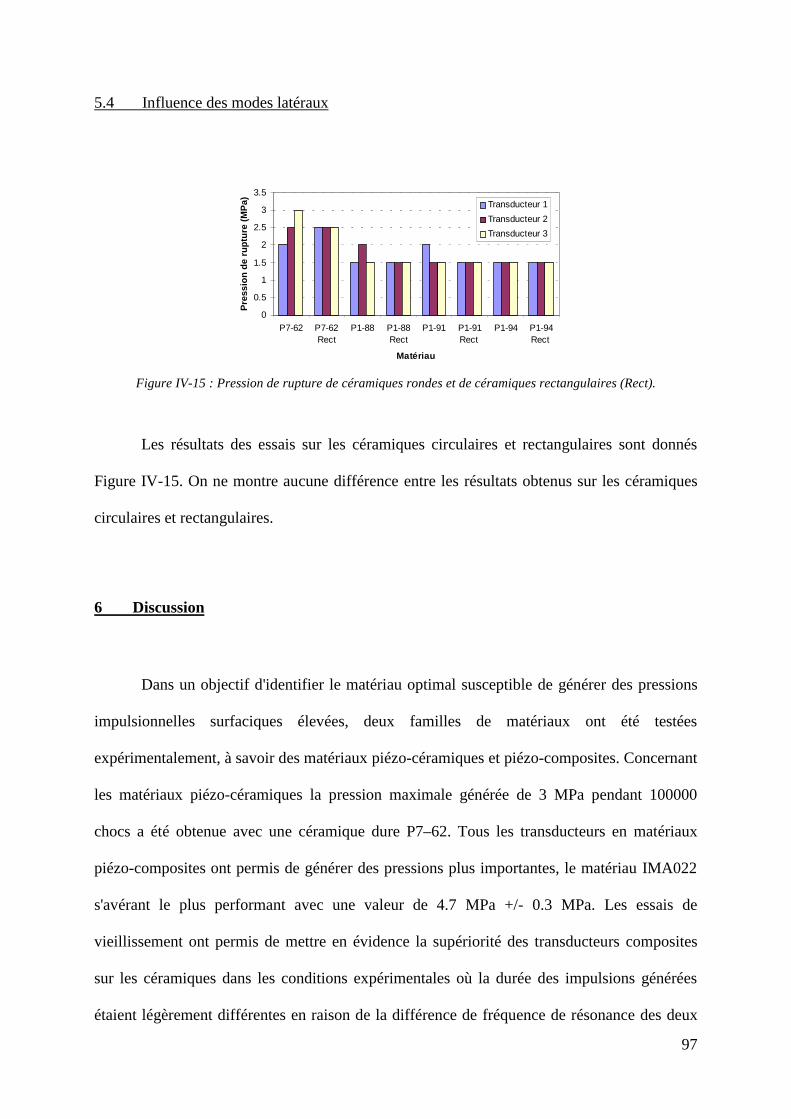
97
5.4 Influence des modes latéraux
0
0.5
1
1.5
2
2.5
3
3.5
P7-62 P7-62Rect
P1-88 P1-88Rect
P1-91 P1-91Rect
P1-94 P1-94Rect
Matériau
Pre
ssio
n de
rup
ture
(M
Pa) Transducteur 1
Transducteur 2
Transducteur 3
Figure IV-15 : Pression de rupture de céramiques rondes et de céramiques rectangulaires (Rect).
Les résultats des essais sur les céramiques circulaires et rectangulaires sont donnés
Figure IV-15. On ne montre aucune différence entre les résultats obtenus sur les céramiques
circulaires et rectangulaires.
6 Discussion
Dans un objectif d'identifier le matériau optimal susceptible de générer des pressions
impulsionnelles surfaciques élevées, deux familles de matériaux ont été testées
expérimentalement, à savoir des matériaux piézo-céramiques et piézo-composites. Concernant
les matériaux piézo-céramiques la pression maximale générée de 3 MPa pendant 100000
chocs a été obtenue avec une céramique dure P7–62. Tous les transducteurs en matériaux
piézo-composites ont permis de générer des pressions plus importantes, le matériau IMA022
s'avérant le plus performant avec une valeur de 4.7 MPa +/- 0.3 MPa. Les essais de
vieillissement ont permis de mettre en évidence la supériorité des transducteurs composites
sur les céramiques dans les conditions expérimentales où la durée des impulsions générées
étaient légèrement différentes en raison de la différence de fréquence de résonance des deux
98
familles de matériaux (720 kHz pour les composites et 1 MHz pour les céramiques).
Néanmoins, en l'absence de différence significative entre les deux échantillons piézo-
céramique P1-88 résonant à 500 kHz et à 1 MHz et dans la mesure où les valeurs moyennes
de la pression maximale supportées et les valeurs des écarts types correspondants sont
proches, il est justifié de considérer que la tenue des matériaux piézo-composites est
nettement supérieure à celle des piézo-céramiques pour une même fréquence de résonance
mécanique.
Le matériau IMA022 (B) semble le mieux adapté des matériaux composites, puisque
sa limite de rupture est la plus élevée. De plus, comme tout matériau piézo-composite, ce
matériau présente l'avantage d'avoir une faible impédance acoustique. Ceci simplifie
énormément la fabrication de l'amortisseur dont l'impédance acoustique doit être égale à celle
du transducteur, si nous voulons générer une impulsion unipolaire. Le matériau IMA023 (C)
donne lui aussi des résultats intéressants.
L’observation des transducteurs céramiques et composites après dysfonctionnement
suggère un mode de destruction différent. Les céramiques cassent en plusieurs morceaux, les
composites sont détruits par des amorçages électriques. La rupture des composites semble liée
à la tenue de la métallisation. On constate en effet très localement la disparition du cuivre
laissant supposer que ces endroits où de petits morceaux de cuivre ont disparu au cours du
vieillissement deviennent des foyers de petits amorçages électriques locaux. Ceux-ci rongent
le matériau petit à petit jusqu’à ce qu’un amorçage apparaisse entre les deux faces. On a pu en
effet constater qu'avant leur destruction de microscopiques arcs étaient présents à la surface
du transducteur. Ces arcs peuvent être dus soit à une différence de potentiel entre différents
points de la surface, soit à la différence de potentiel entre la surface cuivrée et un point d'un
barreau piézo-électrique dont le cuivre a disparu. Ainsi, il est envisageable d’augmenter la
résistance des matériaux composites aux champs électriques de fortes amplitudes en
99
augmentant la tenue des électrodes sur le transducteur. Par contre, la rupture des céramiques
semble due à des phénomènes mécaniques, des contraintes trop élevées à l'intérieur du
matériau.
Les enregistrements des ondes de pression en différents points d'un plan parallèle à la
surface d'un transducteur céramique et d'un transducteur composite montrent une différence
importante entre ces deux types de matériaux. Alors que pour le transducteur composite, les
formes d'ondes sont quasiment identiques quel que soit la position du capteur, les
enregistrements sont très différents dans le cas de la céramique, du moins après la première
arche. Cette variation de la forme d'onde en fonction de la position de l'hydrophone est due
aux ondes de têtes ("Head Waves"), générées par les ondes de surface, qui interfèrent avec
l'onde émise par la surface du transducteur. La première arche ne subit pas d'interférence
puisqu'elle arrive forcément au niveau du capteur avant les ondes de têtes. D. Cathignol et
O.A. Sapozhnikov ont montré que les ondes de surface étaient beaucoup plus présentes avec
un transducteur céramique qu’avec un transducteur composite [82]. Les diagrammes de
rayonnement qu’ils ont obtenu avec des transducteurs céramiques focalisés montrèrent que la
pression résultant des ondes de têtes pouvait même être dans certains cas supérieure à la
pression au point focal [83]. Par contre, les ondes de surface ne sont pas visibles sur les
diagrammes de rayonnement de transducteurs composites focalisés. Il est probable que les
contraintes générées au sein du transducteur par ces ondes de surface soient impliquées dans
la rupture des matériaux céramiques. Néanmoins, l’influence de la focalisation des ondes dues
au mode latéral dans la rupture des transducteurs céramiques n’a pas été vérifiée. Les essais
de comparaison entre des transducteurs circulaires et rectangulaires n'ont en effet pas montré
de différence. Il n'est cependant pas impossible que les ondes latérales soient capables de
détruire un transducteur même de forme rectangulaire et ce de la même façon que si ces ondes
sont focalisées dans le cas d'un transducteur circulaire.

100
En comparaison, les matériaux composites subissent beaucoup moins les contraintes
liées aux ondes latérales. C'est peut-être une des raisons de la résistance de ces matériaux aux
chocs électriques de fortes amplitudes. Par ailleurs, il a été montré que durant la fabrication de
ce type de matériau, le séchage de la résine époxyde provoque un retrait de la matrice
polymère [84]. Ce retrait est à l'origine de l'apparition d'une pré-contrainte du matériau
céramique actif. Or, il est connu depuis longtemps que la pré-contrainte d'un matériau
céramique augmente sa résistance aux champs électriques de fortes amplitudes. Ce principe
est largement utilisé dans les transducteurs de puissance de type Langevin [85] ou de type
Tonpilz [86] par exemple. Il est donc envisageable que la pré-contrainte de la phase
céramique des matériaux composites due au séchage de la phase polymère favorise la
résistance de ces matériaux lorsqu'ils sont excités par des impulsions électriques de grandes
amplitudes.
7 Conclusion
L'ensemble des essais de vieillissement qui ont été menés sur deux familles de
matériaux différents a permis de montrer que les matériaux piézo-composites sont mieux
adaptés à notre application que les matériaux piézo-céramiques. En particulier, les matériaux
composites IMA022 et IMA023 (Imasonic, France) ont permis de générer une pression à la
surface de plus de 4.5 MPa tandis que la pression maximale générée par un matériau piézo-
céramique n'a été que de 2.5 MPa. Nous avons pu constater que la destruction du matériau
piézo-céramique se faisait à partir d'une démétallisation progressive de la surface entraînant
des micro-arcs électriques et finalement une rupture du diélectrique entre les deux faces; la
destruction du matériau piézo-céramique se faisant, quant à elle, par fragmentation. Des

101
mesures de pression au voisinage de la surface de transducteurs composites et céramiques ont
mis en évidence la présence d'ondes radiales dans le cas des transducteurs céramiques.
Par ailleurs, les deux matériaux IMA022 et IMA023 ont en commun des avantages
intéressants pour la conception d'une future coupelle au niveau de l'impédance acoustique.
Grâce à un amortisseur adéquat et au mode d'excitation par une rampe de tension, l'onde
générée sera quasiment unipolaire.

102

102
Chapitre 5 : Etude de différentes conceptions de transducteurs
1 Introduction
Les essais de vieillissement de matériaux piézo-électriques, qui font l'objet du chapitre
précédent, ont permis de montrer que les matériaux composites, notamment les matériaux B et
C, étaient les mieux adaptés à une application de génération d'ondes de choc. Durant ces tests,
il a été remarqué que ces matériaux étaient détruits par des amorçages électriques entre les
deux électrodes, généralement à travers la phase passive. Ces arcs semblent être initialement
dus à un décollement de petites parties des dépôts de cuivre qui constituent les électrodes du
transducteur. Une telle hétérogénéité de la surface des électrodes est à l'origine de fortes
différences de potentiel électrique pouvant mener à la formation d'un arc. L'adhérence des
électrodes de cuivre sur le matériau composite est donc un facteur déterminant de la tenue des
transducteurs à la génération d'ondes ultrasonores de fortes amplitudes.
Par ailleurs, la connexion électrique entre les câbles et les électrodes de cuivre pose
également des problèmes importants. Dans l'idéal, cette connexion devrait s'effectuer sur la
plus grande surface possible, de manière à répartir le flux de courant sur toute l'électrode. De
plus, elle ne doit avoir qu'une influence très faible sur le champ acoustique émis à la surface
du transducteur. Par exemple, une soudure pratiquée directement sur la partie active du
transducteur crée une hétérogénéité de la surface de l'électrode, du fait de la différence
d'impédance acoustique entre la soudure et le milieu de propagation, source de contraintes
mécaniques pouvant mener à un décollement de la soudure et du cuivre et à la destruction du
transducteur. Des essais préliminaires de mise au point du test de vieillissement présenté dans
le chapitre 4, effectués avec des transducteurs soudés, ont montré la faible tenue des

103
transducteurs, dans cette configuration, à la génération d'ondes de fortes amplitudes. Le point
d'amorçage responsable de la destruction du transducteur était par ailleurs systématiquement
proche de la soudure, ce qui tend à la désigner comme le point faible de ce montage.
Le système de ressort toroïdal finalement utilisé pour les essais de vieillissement des
matériaux piézo-électriques (figure IV-10) présente l'intérêt de répartir l'amenée de courant
sur tout le pourtour du transducteur et de lui laisser une certaine liberté de mouvement. De
plus, les nombreux points de contact entre le ressort et l'électrode limitent les contraintes
mécaniques à la surface du transducteur. Cependant, l'observation de transducteurs après
destruction montre qu'il existe un frottement entre le ressort et la surface de cuivre qui peut
endommager l'électrode au voisinage de la zone de contact. Enfin, ce système d'amenée de
courant, relativement complexe, se prête plus à une étude expérimentale qu'à une fabrication
de type industriel, notamment dans la perspective d'empiler les transducteurs comme cela a
été proposé dans l'introduction générale.
Ce chapitre a pour objet l'étude de différents systèmes d'amenée de courant et des
moyens envisagés pour augmenter la tenue en tension et l'adhérence des électrodes.
2 Le report des électrodes
Il s'agit de reporter les électrodes sur une surface non-active du transducteur, à l'aide
d'un montage représenté sur la figure V-1. Le transducteur est monté au centre d'une rondelle
fabriquée dans un matériau isolant recouvert sur chaque face d'un dépôt de cuivre. En
pratique, ces rondelles ont été débitées dans des plaques de circuit imprimé. Des électrodes
recouvrant le transducteur jusqu'à la rondelle assureront la liaison électrique entre ces deux
éléments. Ainsi, les fils de connexion pourront être soudés sur la rondelle. Celle-ci n'étant pas
une surface vibrante, la soudure n'induira aucune contrainte d'origine acoustique ou

104
mécanique. Par ailleurs, la liaison électrique entre la rondelle et le transducteur se fait sur
toute sa périphérie, ce qui permet de répartir au mieux le flux de courant sur l'électrode.
Figure V-1 : Principe du report des électrodes.
Ce système permet également d'empiler les transducteurs sans avoir à pratiquer
d'encoches dans le matériau composite pour faire passer les fils électriques. Celle-ci seront
réalisées dans la rondelle inactive.
2.1 Matériel et méthodes
Les transducteurs ont été testés à l'aide du montage d'excitation électrique de la figure
IV-5. Le remplacement de l'éclateur à gaz par un transistor MOS (Behlke, Allemagne)
autorise le fonctionnement à des tensions basses, ce qui permet de supprimer le pont capacitif
qui oblige d'adapter la valeur des composants du montage pour chaque valeur de pression à
générer. De plus, la réouverture du commutateur peut être commandée, ce qui permet la
génération de rampes de tension plus satisfaisantes qu'avec un éclateur à gaz.
Les tests ont été indifféremment réalisés avec des matériaux A, B ou C, dont la
définition est donnée chapitre IV, § 3.1, en fonction des conditions d'approvisionnement de la
société Imasonic. Les tests de vieillissement de ces matériaux, présentés dans le chapitre IV,
ont montré qu'ils étaient équivalent du point de vue de la limite en pression.
105
Plusieurs techniques ont été envisagées pour la réalisation de surfaces conductrices : la
colle à l'argent, le film thermo-conducteur et le dépôt électrochimique de cuivre et d'or.
La colle à l'argent (Emerson & Cuming, USA) est appliquée par sérigraphie sur le
transducteur. Trois transducteurs ont été testés sans lame ni milieu arrière. De manière à
étudier l'influence d'une lame ou d'un milieu arrière sur la tenue des transducteurs, deux
transducteurs avec une lame et un transducteur avec milieu arrière mais sans lame ont
également été testés. Rappelons qu'en raison du mode d'excitation des transducteurs par une
rampe de tension, l'onde émise est deux fois plus large qu'elle ne le serait à la fréquence de
résonance. L'épaisseur de la lame d'adaptation est donc égale à 2
λ, avec λ la longueur d'onde
associée à la fréquence de résonance du transducteur.
Le film thermo-conducteur (Staystik, Alphametals Inc., USA) est un film conducteur
qui adhère au transducteur après chauffage. Deux transducteurs ont été testés sans lame ni
milieu arrière.
Plusieurs entreprises ont été contactées pour la réalisation de dépôts de cuivre et d'or
sur des transducteurs préalablement montés au laboratoire : Shipley Ronal, à Vaulx-en-Velin,
ACM, à Villiers St Frédéric, pour un dépôt de cuivre, et CI+E, à Loire sur Rhône, pour un
dépôt d'or. Cinq transducteurs sans lame ni milieu arrière ont ainsi pu être testés : quatre avec
un dépôt de cuivre, un avec un dépôt d'or. Les différentes techniques utilisées étant
confidentielles, il nous est impossible de les présenter.
Tous les transducteurs ont été testés selon le protocole décrit dans le chapitre 4, § 4.1
(vieillissement par paliers). Le circuit électrique d'excitation est réglé afin que le transducteur
génère 1 MPa à sa surface, puis on réalise 100 000 tirs. Si le transducteur fonctionne toujours,
la pression générée est augmentée à 1.5 MPa et 100 000 tirs sont à nouveau effectués par le
transducteur. La pression est incrémentée de 0.5 MPa à chaque fois jusqu'à la rupture du
transducteur. Lorsque celle-ci survient, la valeur de pression atteinte est relevée.

106
La société Imasonic a également été chargée de fabriquer des transducteurs composites
selon le principe du report de l'électrode et d'y déposer des surfaces de cuivre. Huit
transducteurs ont été fabriqués avec lame et milieu arrière. Quatre transducteurs ont été testés
selon le protocole décrit dans le chapitre 4, § 4.1, tandis que les quatre autres ont été testés en
vieillissement de longue durée, générant 4 MPa pendant 4 millions de tirs.
Les transducteurs ont été testés dans un bain d'huile de ricin qui présente la même
impédance acoustique que l'eau et les mesures de pression ont été réalisées à l'aide d'un
hydrophone aiguille PZT-Z44-0400 (SEA, USA). Les transducteurs ont une fréquence de
résonance de 720 kHz et un diamètre de 20 mm.
2.2 Résultats et discussion
La figure V-2 présente les résultats obtenus avec la colle à l'argent, le film thermo-
conducteur, les dépôts de cuivre et d'or réalisés par des sociétés non spécialistes des
transducteurs piézo-électriques. Les résultats obtenus avec le système à ressort, donnés dans
le chapitre 4, sont également rappelés.
0
1
2
3
4
5
6
ressort Colle Argent Film Thermo. Dépôt Cu Dépôt Or
Configuration
Pre
ssio
n de
rup
ture
(M
Pa)
Figure V-2 : Résultats obtenus avec les différentes configurations de transducteurs sans lame ni milieu arrière
(sauf Imasonic).

107
Les valeurs de pression atteintes par les transducteurs munis d'électrodes en colle à
l'argent sont similaires aux résultats obtenus avec le système à ressort. La colle à l'argent ne
permet donc pas d'augmenter la tenue du matériau à la génération d'ondes de fortes
amplitudes. Par ailleurs, les transducteurs avec lame ont rompu à 3.5 et 4.5 MPa, tandis que le
transducteur avec milieu arrière a été détruit à 5 MPa, ce qui est équivalent aux résultats
obtenus sans lame ni milieu arrière. La présence d'une lame ou d'un milieu arrière ne semble
donc pas compromettre les performances des transducteurs.
Les deux transducteurs testés avec le film thermo-conducteur ont été détruits à une
pression de 2.5 MPa, ce qui est largement inférieur aux résultats obtenus avec le système à
ressort.
Les dépôts d'électrodes de cuivre et d'or réalisés par les sociétés Shipley Ronal, ACM
et CI+E ont également donné des résultats très inférieurs au système à ressort. Pour les dépôts
de cuivre, deux transducteurs ont atteint 3 MPa et les deux autres 2.5 MPa. Pour le dépôt d'or,
le seul transducteur testé n'a atteint que 3 MPa.
Enfin, les résultats obtenus avec les transducteurs fabriqués par Imasonic sont donnés
par les tables V-1, pour le vieillissement par paliers, et V-2, pour le vieillissement de 4
millions de tirs à 4 MPa. Les transducteurs testés en vieillissement par paliers ont tous donnés
des résultats supérieurs aux résultats obtenus avec le système à ressort. La pression moyenne
de rupture est de 6.6 MPa, avec un écart type de 1.1 MPa, relativement important. Pour le
vieillissement de longue durée, il existe une différence significative entre les deux premiers et
les deux derniers transducteurs. Seuls deux transducteurs sur quatre ont pu générer 4 MPa
pendant 4 millions de tirs.
Transducteur 1 2 3 4
Résultat 8 MPa (8 kV) 7 MPa (6.9 kV) 5.5 MPa (5.6 kV) 6 MPa (5.3 kV)
Table V-1 : Résultats du vieillissement par paliers des transducteurs IMASONIC.

108
Transducteur 1 2 3 4
Résultat Succès Succès Rupture après 2 millions de tirs Rupture après 2.3 millions de tirs
Table V-2 : Résultats du vieillissement de longue durée des transducteurs IMASONIC.
Ces huit transducteurs ont également permis de faire l'observation suivante : à la fin du
test, il est généralement aisé de décoller la lame du transducteur. Lors de cette opération, la
quasi totalité de l'électrode de cuivre reste collée à la lame. La cohésion du cuivre sur la lame
est donc supérieure à celle du cuivre sur le matériau piézo-composite.
2.3 Conclusion
Le film thermo-conducteur a donné des résultats très inférieurs au système à ressort.
De plus, il paraît difficile de réaliser un empilement de transducteur avec cette technique qui
nécessite de chauffer le film. Si celui-ci est pressé entre deux transducteurs, il est nécessaire
de chauffer de manière plus intensive que s'il est à l'air libre, ce qui risque fort de dépolariser
le transducteur. Les dépôts d'électrodes de cuivre et d'or réalisées par des sociétés non-
spécialistes des transducteurs piézo-composites n'ont également donné que de mauvais
résultats. Ces deux solutions ont donc été abandonnées.
Par contre, la colle à l'argent, et surtout les dépôts d'électrodes réalisés par Imasonic,
ont donné de bons résultats. Ces derniers permettent même d'atteindre des pressions bien
supérieures à celles qui ont été atteintes avec le système à ressort. Le report de l'électrode sur
une surface non active sur laquelle il est possible de souder des câbles électriques a permis
d'augmenter la tenue des transducteurs à la génération d'ondes de pression de fortes
amplitudes. Néanmoins, le facteur limitant les performances des transducteurs semble
toujours être l'adhérence du dépôt de cuivre sur le matériau composite, inférieure à

109
l'adhérence du cuivre sur la lame. De plus, l'écart-type entre les résultats obtenus est
relativement important.
3 Amélioration de la tenue en tension des transducteurs
Deux solutions ont été envisagées pour augmenter la tenue des transducteurs lorsqu'ils
sont excités par des impulsions de haute tension : les picots d'accrochage de la lame et
l'augmentation de la taille et de l'espacement des barreaux céramiques dans le matériau
composite. La première solution vise à empêcher le cuivre de se détacher du matériau, tandis
que la seconde réduit statistiquement le risque d'amorçage en diminuant le nombre
d'interfaces céramique-résine.
3.1 Les picots d'accrochage
La société Imasonic a été chargée de fabriquer des transducteurs de la manière
suivante : lors de la découpe du matériau céramique, un certain nombre de barreaux ont été
retirés de la matrice, puis la résine polymère a été introduite. Après séchage, des trous ont été
pratiqués à travers le transducteur à la place des barreaux manquant. Ainsi, lors du moulage
de la lame et du milieu arrière, la résine qui les constitue traverse le transducteur en de
multiples endroits, créant un réseau de picots liant la lame au milieu arrière, de manière à
empêcher le cuivre de se détacher du matériau et à augmenter ainsi l'intégrité du transducteur.
Huit nouveaux transducteurs ont été testés. Comme précédemment, la moitié des
transducteurs a été testé en vieillissement par paliers, tandis que les autres ont subi un
vieillissement long de 4 millions de tirs à 4 MPa.

110
Transducteur (Type C) 1 2 3 4
Résultat 8 MPa (8.2 kV) 8.5 MPa (8.7 kV) 7.5 MPa (7.9 kV) 7.5 MPa (7.9 kV)
Table V-3 : Résultats en vieillissement par paliers des transducteurs IMASONIC avec picots d'accrochage.
Transducteur (Type B) 1 2 3 4
Résultat Succès Succès Succès Rupture après 0.86 million de tirs
Table V-4 : Résultats en vieillissement long des transducteurs IMASONIC avec picots d'accrochage.
Les résultats obtenus avec ces deux séries de transducteurs sont donnés par les tables
V-3 et V-4, respectivement pour les essais en vieillissement par paliers et de longue durée. On
constate une amélioration sensible des performances des transducteurs. En vieillissement par
paliers, la moyenne de la pression de rupture est de 7.9 MPa et l'écart type entre les différents
transducteurs, de 0.48 MPa, a considérablement réduit. En vieillissement de longue durée,
trois transducteurs sur quatre ont atteint l'objectif de 4 millions de tirs à 4 MPa. Par contre, un
transducteur a été détruit après seulement 860 000 tirs. Globalement, les résultats sont tout de
même plus élevés et plus uniformes en présence de picots d'accrochage.
Devant ces résultats encourageants, une expérience de comparaison entre
transducteurs avec et sans picots d'accrochage a été conçue. Les performances de six
transducteurs avec picots ont été comparées à celles de six transducteurs sans picot. Ces
transducteurs résonnent à une fréquence de 360 kHz, c'est-à-dire qu'ils sont deux fois plus
épais que des transducteurs 720 kHz. La tension électrique nécessaire à la génération d'une
onde de 4 MPa d'amplitude est donc deux fois plus élevée qu'avec des transducteurs 720 kHz.
On suppose donc que les contraintes d'origine électrique sont plus importantes avec ces
transducteurs, à 4 MPa, qu'avec les transducteurs précédents. Le test est un vieillissement à 4
MPa, en relevant le nombre de tirs réalisé par chaque transducteur avant sa rupture. Les
résultats sont donnés par la figure V-3.

111
0
50000
100000
150000
200000
250000
300000
350000
400000
450000
500000
1 2 3 4 5 6 1 2 3 4 5 6
Transducteurs
Nb
Tirs
Avec Picots Sans Picot
Figure V-3 : Résultats de la comparaison entre transducteurs avec et sans picots d'accrochage.
Les résultats sont plus intéressants avec picots que sans picot. Les résultats moyens
sont pour les transducteurs avec picots de 300000 tirs contre 150000 pour les transducteurs
sans picot, les écart-types étant respectivement de 150000 et 60000 tirs. Il existe donc une
disparité très importante entre les résultats d'un même type de transducteurs.
Il semblerait donc que la présence de picots d'accrochage tend à augmenter la tenue
des transducteurs à la génération d'onde de pression de fortes amplitudes, ce qui confirme le
résultat précédemment obtenu. Néanmoins, cette expérience met en évidence des problèmes
de reproductibilité des résultats pour les deux types de transducteurs testés. Une mauvaise
maîtrise de la fabrication des transducteurs par la société Imasonic, aux niveaux de pression
requis, peut être à l'origine de ces disparités, en particulier dans le cas des transducteurs avec
picots qui ont été fabriqués pour la première fois à l'occasion de cette expérience. Des
problèmes d'écoulement de la résine constituant le milieu arrière et la lame dans les trous
percés à travers le transducteur peuvent être impliqués. Sous des champs électriques si
intenses, des défauts très légers du transducteur tels que des micro-fissures de barreaux
céramiques ou des bulles dans la phase passive du composite sont susceptibles d'avoir des
conséquences très importantes sur la tenue des transducteurs.

112
3.2 Augmentation de la taille et de l'espacement des barreaux céramiques
Dans un matériau piézo-électrique composite, dans lequel des barreaux céramiques
sont disposés dans une matrice, des modes de résonance radiale propres aux dimensions et à
la disposition des barreaux peuvent s'instaurer. Une disposition aléatoire des barreaux ainsi
que des dimensions inférieures à la longueur d'onde émise permettent de réduire ce
phénomène [87, 88]. La découpe du matériau céramique est donc déterminée en pratique par
la longueur d'onde émise.
Dans notre cas où l'excitation électrique du transducteur est réalisée avec une rampe de
tension, l'onde générée est deux fois plus large qu'elle ne le serait à sa fréquence de résonance,
c'est-à-dire que le fondamental de l'onde générée est à la moitié de la fréquence de résonance
du transducteur. Théoriquement, l'espacement inter-barreaux et la dimension des barreaux,
qui ont été jusqu'à présent calculés à partir de la fréquence de résonance propre du
transducteur, pourrait dans notre cas être deux fois plus élevés sans pour autant favoriser une
résonance radiale. Or, il a été constaté que les amorçages électriques se produisaient le plus
souvent au niveau des interfaces entre les barreaux céramique et la résine. Des dimensions de
barreaux plus élevées ainsi qu'un espacement plus important permettrait de réduire le nombre
de barreaux et donc d'interfaces céramique-résine, tout en allégeant le coût de fabrication.
Cinq transducteurs, avec lame et milieu arrière, résonant à une fréquence de 360 kHz
et dont les dimensions de la structure interne ont été calculés à partir de la valeur de 180 kHz,
ont subi un vieillissement à 3 MPa (6.8 kV). Le nombre de tirs réalisé par chaque transducteur
avant sa rupture a été relevée. Des mesures préliminaires de la pression à la surface des
transducteurs a permis de constater une très bonne uniformité de la forme de l'onde émise en
tous les points de la surface active et ainsi de vérifier la faible importance des résonances
radiales avec ce type de transducteurs excités par une rampe de tension.
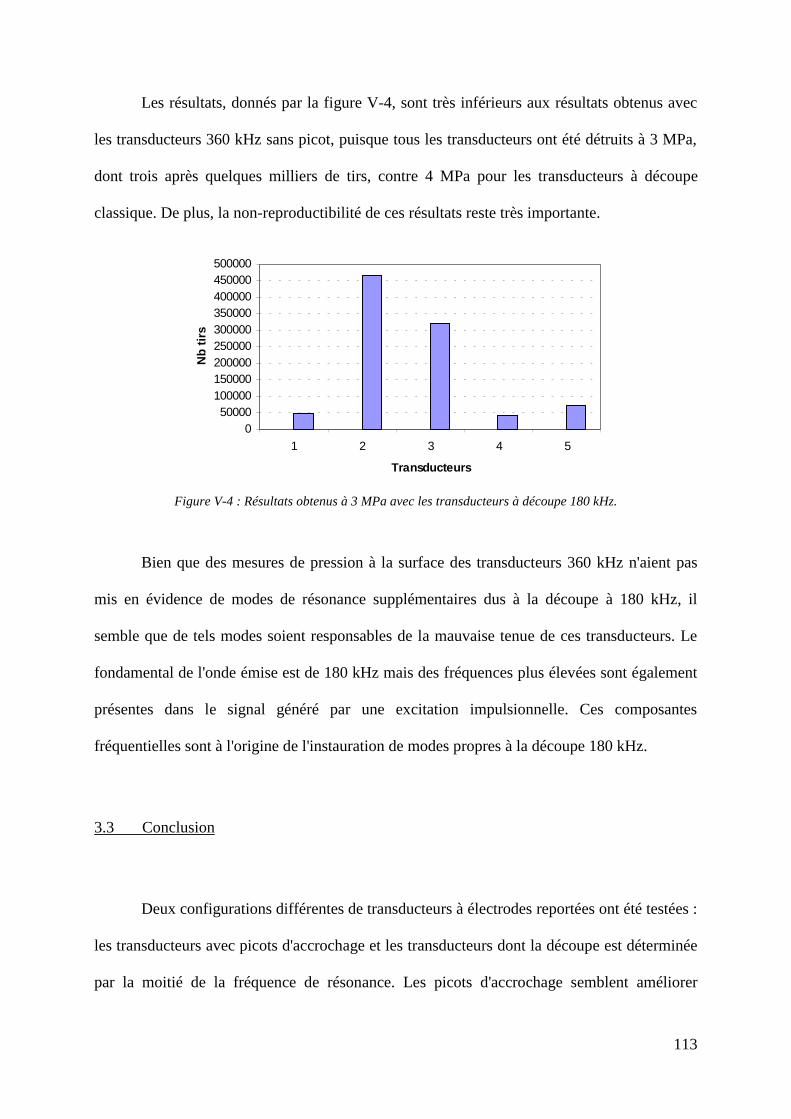
113
Les résultats, donnés par la figure V-4, sont très inférieurs aux résultats obtenus avec
les transducteurs 360 kHz sans picot, puisque tous les transducteurs ont été détruits à 3 MPa,
dont trois après quelques milliers de tirs, contre 4 MPa pour les transducteurs à découpe
classique. De plus, la non-reproductibilité de ces résultats reste très importante.
050000
100000150000200000250000300000350000400000450000500000
1 2 3 4 5
Transducteurs
Nb
tirs
Figure V-4 : Résultats obtenus à 3 MPa avec les transducteurs à découpe 180 kHz.
Bien que des mesures de pression à la surface des transducteurs 360 kHz n'aient pas
mis en évidence de modes de résonance supplémentaires dus à la découpe à 180 kHz, il
semble que de tels modes soient responsables de la mauvaise tenue de ces transducteurs. Le
fondamental de l'onde émise est de 180 kHz mais des fréquences plus élevées sont également
présentes dans le signal généré par une excitation impulsionnelle. Ces composantes
fréquentielles sont à l'origine de l'instauration de modes propres à la découpe 180 kHz.
3.3 Conclusion
Deux configurations différentes de transducteurs à électrodes reportées ont été testées :
les transducteurs avec picots d'accrochage et les transducteurs dont la découpe est déterminée
par la moitié de la fréquence de résonance. Les picots d'accrochage semblent améliorer
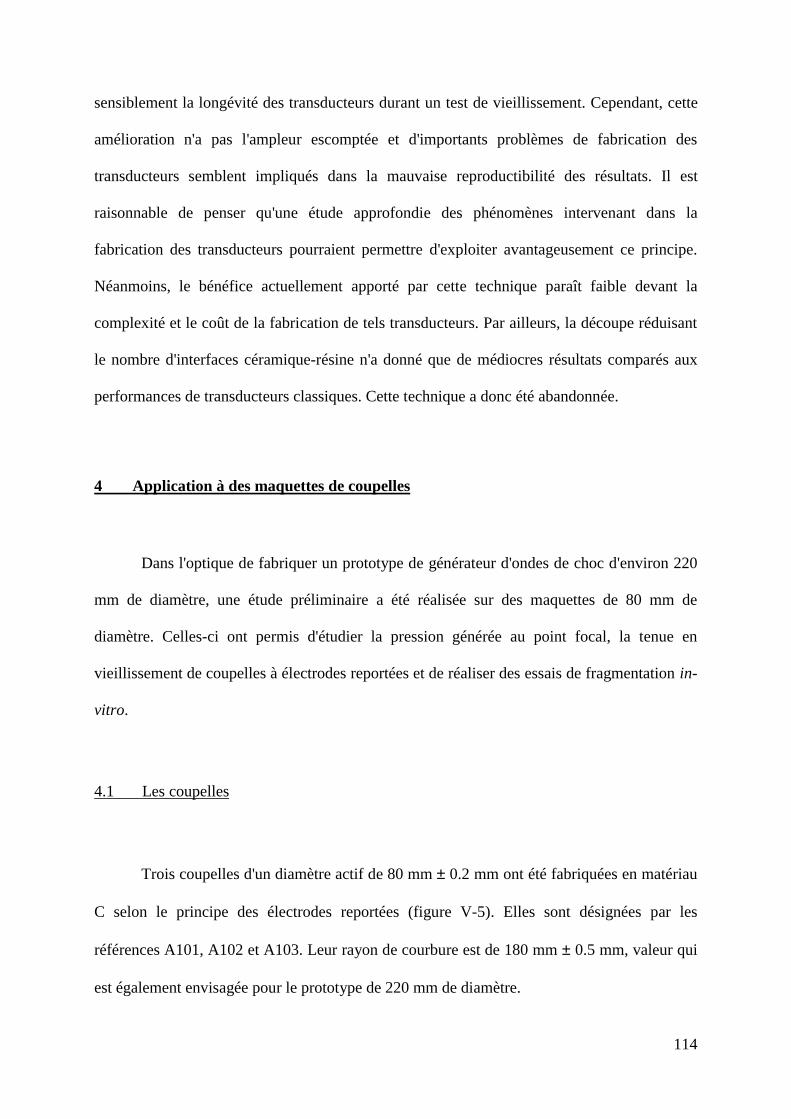
114
sensiblement la longévité des transducteurs durant un test de vieillissement. Cependant, cette
amélioration n'a pas l'ampleur escomptée et d'importants problèmes de fabrication des
transducteurs semblent impliqués dans la mauvaise reproductibilité des résultats. Il est
raisonnable de penser qu'une étude approfondie des phénomènes intervenant dans la
fabrication des transducteurs pourraient permettre d'exploiter avantageusement ce principe.
Néanmoins, le bénéfice actuellement apporté par cette technique paraît faible devant la
complexité et le coût de la fabrication de tels transducteurs. Par ailleurs, la découpe réduisant
le nombre d'interfaces céramique-résine n'a donné que de médiocres résultats comparés aux
performances de transducteurs classiques. Cette technique a donc été abandonnée.
4 Application à des maquettes de coupelles
Dans l'optique de fabriquer un prototype de générateur d'ondes de choc d'environ 220
mm de diamètre, une étude préliminaire a été réalisée sur des maquettes de 80 mm de
diamètre. Celles-ci ont permis d'étudier la pression générée au point focal, la tenue en
vieillissement de coupelles à électrodes reportées et de réaliser des essais de fragmentation in-
vitro.
4.1 Les coupelles
Trois coupelles d'un diamètre actif de 80 mm ± 0.2 mm ont été fabriquées en matériau
C selon le principe des électrodes reportées (figure V-5). Elles sont désignées par les
références A101, A102 et A103. Leur rayon de courbure est de 180 mm ± 0.5 mm, valeur qui
est également envisagée pour le prototype de 220 mm de diamètre.
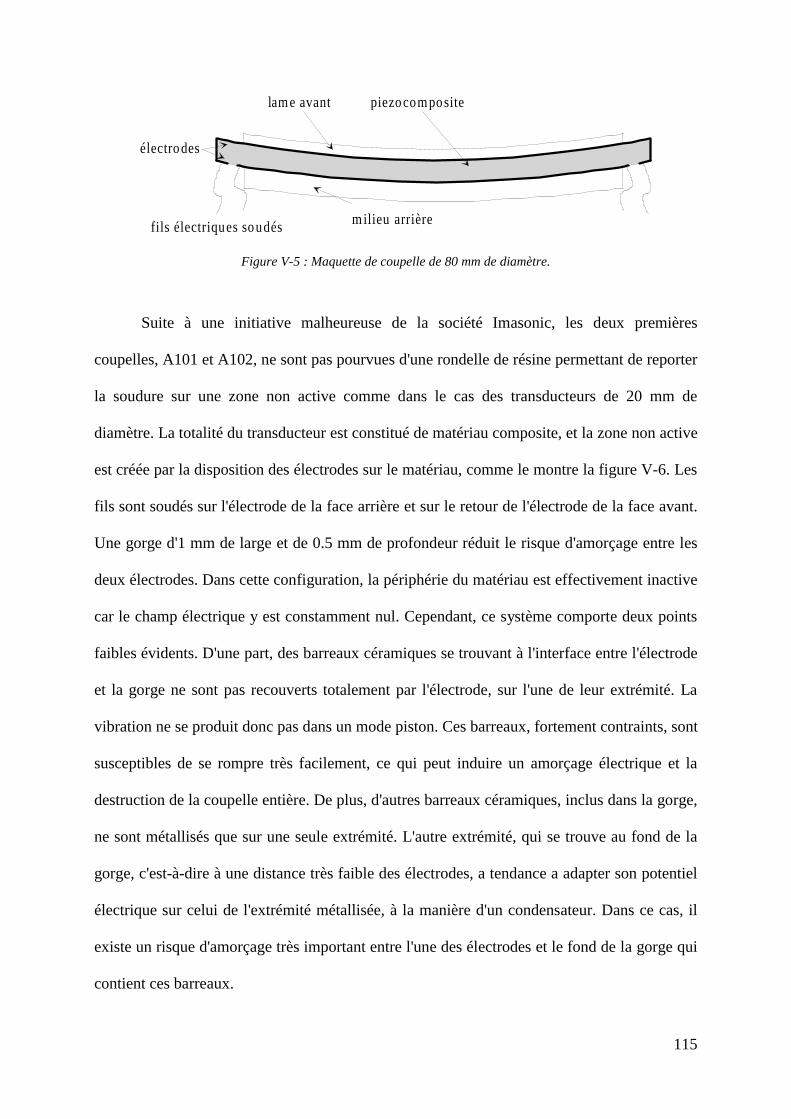
115
milieu arrière
lame avant piezocomposite
électrodes
fils électriques soudés
Figure V-5 : Maquette de coupelle de 80 mm de diamètre.
Suite à une initiative malheureuse de la société Imasonic, les deux premières
coupelles, A101 et A102, ne sont pas pourvues d'une rondelle de résine permettant de reporter
la soudure sur une zone non active comme dans le cas des transducteurs de 20 mm de
diamètre. La totalité du transducteur est constitué de matériau composite, et la zone non active
est créée par la disposition des électrodes sur le matériau, comme le montre la figure V-6. Les
fils sont soudés sur l'électrode de la face arrière et sur le retour de l'électrode de la face avant.
Une gorge d'1 mm de large et de 0.5 mm de profondeur réduit le risque d'amorçage entre les
deux électrodes. Dans cette configuration, la périphérie du matériau est effectivement inactive
car le champ électrique y est constamment nul. Cependant, ce système comporte deux points
faibles évidents. D'une part, des barreaux céramiques se trouvant à l'interface entre l'électrode
et la gorge ne sont pas recouverts totalement par l'électrode, sur l'une de leur extrémité. La
vibration ne se produit donc pas dans un mode piston. Ces barreaux, fortement contraints, sont
susceptibles de se rompre très facilement, ce qui peut induire un amorçage électrique et la
destruction de la coupelle entière. De plus, d'autres barreaux céramiques, inclus dans la gorge,
ne sont métallisés que sur une seule extrémité. L'autre extrémité, qui se trouve au fond de la
gorge, c'est-à-dire à une distance très faible des électrodes, a tendance a adapter son potentiel
électrique sur celui de l'extrémité métallisée, à la manière d'un condensateur. Dans ce cas, il
existe un risque d'amorçage très important entre l'une des électrodes et le fond de la gorge qui
contient ces barreaux.

116
(a)
P ie zo c o mpo s ite
E le c tro d e d e la fa c e a rr iè re G o rge
E le c tro d e d e la fa c e a va nt
R e to ur d e l'é le c tro d e d e la fa c e a va nt
(b)
Figure V-6 : Disposition des électrodes sur le matériau composite des coupelles A101 et A102, vue de dessus (a)
et en coupe (b).
Sur la troisième coupelle, A103, le report des électrodes est réalisé sur une rondelle de
résine munie de dépôt de cuivre.
La table V-5 donne les caractéristiques des maquettes. La fréquence de résonance est
de 360 ou 460 kHz selon les coupelles.
Référence Coupelle A101 A102 A103
Fréquence de résonance (kHz) 460 460 360
Milieu Arrière 5 mm, 6.5 MRayl 5 mm, 6.5 MRayl 6 mm, 6.5 MRayl
Assemblage 4 quarts 4 quarts Monobloc
Table V-5 : Caractéristiques des coupelles.
Le futur prototype de coupelle de 220 mm de diamètre ne pourra pas être fabriqué en
un seul bloc par la société Imasonic étant donné le dimensionnement de leurs machines de
découpe. On envisage donc de l'assembler en 4 quarts. Afin de valider cette configuration,
deux maquettes de coupelles (A101 et A102) ont été fabriquées en 4 parties de taille égale.
117
4.2 Etude de la tenue en vieillissement
Pour une même tension d'excitation, le courant traversant un transducteur de 80 mm de
diamètre est très supérieur à celui qui traverserait un transducteur de 20 mm de diamètre, la
capacité équivalente étant proportionnelle au carré du diamètre. Le commutateur utilisé
jusqu'à présent étant limité en courant à 90 A, il n'était pas possible de l'utiliser pour exciter
les maquettes de coupelle. En cas d'amorçages, le courant peut atteindre des valeurs beaucoup
plus élevées. Un nouveau système d'excitation a donc été fabriqué, basé sur le même schéma
électrique, et utilisant un commutateur à thyristor HTS 120-500-SCR 12kV/5kA (Behlke
GmbH, Allemagne). A la différence du transistor HTS 81-09 précédemment utilisé, ce
commutateur n'autorise pas la commande de sa réouverture. Il reste conducteur tant qu'un
courant circule, puis il s'ouvre spontanément, à la manière d'un éclateur à gaz. Cette
caractéristique rend plus complexe la conception d'un circuit de décharge permettant une
excitation par une rampe de tension. En utilisant le modèle présenté dans le chapitre 3, la
valeur optimale des composants a pu être déterminée théoriquement.
Les coupelles ont toutes été testées dans un bain d'huile de ricin.
La coupelle A102 a été testée en premier en vieillissement à 3.5 MPa (6.3 kV). Au
bout de 30000 tirs, un amorçage s'est produit au niveau de la gorge séparant les électrodes, ce
qui a confirmé notre crainte devant les points faibles de la disposition des électrodes. Un éclat
de lame s'est détaché qui permit de voir la zone d'amorçage par dessus la gorge.
Devant ce mauvais résultat, la coupelle A101 a été usinée, préalablement à son test,
dans le but d'enlever le pourtour du transducteur jusqu'à la gorge qui a été incriminée dans la
mauvaise tenue de la coupelle précédente. Puis des fils d'alimentation ont été fixés aux
électrodes à l'aide de colle à l'argent conductrice. Cette coupelle a également été testée en
vieillissement à 3.5 MPa (6 kV). L'amorçage s'est produit au bout de 62000 tirs entre deux
118
secteurs. Un morceau de lame s'est à nouveau détaché au dessus de la zone d'amorçage, ce qui
a permis de la localiser.
La dernière coupelle, de référence A103, a été testée en vieillissement à 2 MPa (4.6
kV). Au bout de 389000 tirs, un amorçage s'est produit près d'un fil électrique en raison d'une
trop faible distance de sûreté entre le fil soudé sur l'électrode de la face avant et l'électrode
arrière. La lame était intacte et le transducteur ne semblait que faiblement endommagé. La
zone d'amorçage, de faibles dimensions, a été enlevée par usinage et le trou rebouché avec de
la résine. La coupelle, une fois réparée, a pu être à nouveau testée en vieillissement. Quatre
millions de tirs à 2 MPa ont pu être réalisés. Puis, la pression a été élevée à 2.5 MPa et le test
a repris. La rupture définitive de la coupelle s'est produit dès les premiers tirs.
Deux points faibles ont ainsi clairement été identifiés sur ces coupelles : la création
d'une zone non active par la disposition des électrodes, d'une part, et le montage en quatre
quarts, d'autre part. Le report des électrodes sur une rondelle de résine donne de meilleurs
résultats que la création d'une zone non active par la disposition des électrodes en raison des
points faibles, précédemment énoncés, de ce système. Par contre, le prototype de 220 mm de
diamètre nécessitant d'être monté en quatre quarts au moins, il sera probablement
indispensable de les isoler électriquement et mécaniquement de manière plus efficace.
Enfin, ces coupelles n'atteignent pas les performances obtenues par les transducteurs
de 20 mm de diamètre résonant à une fréquence de 360 kHz. Nous supposons que les
amorçages sont dus à des défauts dans la structure du matériau composite, tels que des
fissures de la céramique ou des bulles enfermées dans la résine. Dans ce cas, l'augmentation
de la surface du transducteur accroît la probabilité de présence d'un tel défaut dans le matériau
et réduit la tenue du transducteur excité par des impulsions de haute tension.

119
4.3 Pression au point focal
La pression au point focal a été mesurée sur la coupelle A103 à l'aide d'un hydrophone
à fibre optique dont la bande passante est de 0-30 MHz (Université de Stuttgart, Allemagne).
Pour ce faire, une colonne d'eau dégazée a été plongée dans le bain d'huile, au-dessus de la
coupelle. Une fine membrane de polyuréthanne, transparente aux ultrasons, assurait
l'étanchéité de la colonne d'eau. Ainsi, la fibre pouvait être plongée dans l'eau pour la mesure.
Le diamètre de la fibre est de 100 µm. La pression générée à la surface de la coupelle était de
2 MPa. La pression au point focal a également été simulée à l'aide d'un modèle temporel
développé au laboratoire [65].
-10
-5
0
5
10
15
20
0 0.5 1 1.5 2 2.5 3 3.5 4
t (µs)
Pre
ssio
n au
poi
nt fo
cal (
MP
a)
Simulation
Mesure
Figure V-7 : Pression au point focal de la coupelle A103, mesurée et simulée.
Les résultats obtenus expérimentalement et théoriquement sont donnés par la figure V-
7. La courbe expérimentale est très proche de la courbe théorique. Une pression maximale de
15 MPa est obtenue au point focal de la coupelle. Le temps de montée est de 60 ns et la durée
totale de l'impulsion de 600 ns.
120
4.4 Essais de fragmentation in vitro
Un essai de fragmentation de 4 billes de plâtre standards a pu être réalisé durant le
vieillissement de la coupelle A103. La bille d'1 cm de diamètre, après un trempage de
quelques heures dans de l'eau dégazée, était maintenue dans un panier constitué d'un filet en
plastique dont le maillage était de 1 millimètre. Puis la bille était placée au point focal de la
coupelle. Lorsqu'aucun fragment n'était plus présent dans le filet, le nombre de tirs effectué
était relevé.
La table V-6 donne le nombre de tirs effectués sur chaque bille avant sa fragmentation
totale. Etant donnée la faible dimension de la coupelle, ces résultats sont très encourageants.
Bille 1 2 3 4
Poids (g) 1.93 1.94 1.92 1.91
Nombre de tirs 5000 4569 4869 4211
Table V-6 :Résultat des essais de fragmentation in-vitro.
4.5 Conclusion
L'étude de coupelles de 80 mm de diamètre a permis de montrer que la création d'une
zone non active par la disposition des électrodes est délicate et favorise les amorçages. Une
rondelle de résine sur laquelle une épaisseur de cuivre est déposée, pour la réalisation du
report des électrodes sur une surface non active, est la solution retenue pour la fabrication du
prototype de 220 mm de diamètre. Par ailleurs, le montage de la coupelle en quatre quarts est
également un point délicat puisque des amorçages se sont produit entre deux secteurs.
L'isolation électrique et mécanique des secteurs doit être améliorée.
Les coupelles étudiées ayant un diamètre de 80 mm et un rayon de courbure de 180
mm, les ondes sont beaucoup moins focalisées qu'elles ne le seront avec le futur prototype.

121
Cependant, un premier essai de fragmentation de billes de plâtre a donné des résultats
satisfaisants compte tenu des petites dimensions de la surface active et de la faible
focalisation.
Une pression de 2 MPa a été générée à la surface d'une coupelle pendant quatre
millions de tirs, ce qui est plus faible que les performances escomptées mais néanmoins
suffisant pour fragmenter.
5 Conclusion
Différentes conceptions de transducteurs ont été testées dans le but d'améliorer leur
tenue à la génération d'ondes de fortes amplitudes. Le report des électrodes sur une surface
non active sur laquelle il est possible de souder des fils permet d'augmenter significativement
les performances des transducteurs. Les picots d'accrochage de la lame permettent d'atteindre
des valeurs de pression plus élevées, mais leur intérêt reste faible sous leur forme actuelle. La
réduction du nombre de barreaux céramiques dans le matériau composite n'a pas donné de
résultat satisfaisant. Enfin, des problèmes de fabrication semblent être à l'origine d'une
mauvaise reproductibilité des résultats. Il serait intéressant d'étudier de manière plus
approfondie les défauts qui peuvent survenir durant la fabrication d'un transducteur composite
afin d'améliorer ce point.
Les coupelles ont permis de préciser les caractéristiques du futur prototype de
générateur. La création d'une zone non active par la disposition des électrodes sera
abandonnée pour un report des électrodes sur une rondelle de résine. Par ailleurs, les picots
d'accrochage ne seront pas utilisés et une attention toute particulière sera apportée à l'isolation
électrique et mécanique des quatre secteurs. Dans ces conditions, la tenue du matériau devrait
être sensiblement améliorée. Le pouvoir de fragmentation du prototype devrait être

122
satisfaisant, au vu des essais réalisés sur les coupelles et de la qualité de la focalisation qui
sera plus forte sur le prototype que sur les maquettes.

123

123
Chapitre 6 : Etude d'empilements de transducteurs
1 Introduction
La réduction de la taille des générateurs piézo-électriques ne peut se faire sans
augmentation de la pression générée à la surface du matériau. Dans le but d'augmenter la
pression, une solution proposée dans l'introduction générale est d'empiler les transducteurs et
de les exciter avec un retard tel que les ondes générées par chaque transducteur se combinent
de manière constructive à la surface de l'empilement.
La figure VI-1 décrit le principe de l'excitation d'empilements de transducteurs. Le
transducteur 1 étant excité au temps t = t0, l'onde qu'il génère atteint l'interface avec le milieu
de propagation au temps t = t0 + e/c, avec e l'épaisseur des transducteurs et c la célérité des
ultrasons dans le matériau piézo-électrique. Si à cet instant, le transducteur 2 est excité, il
génère une onde dans le milieu de propagation qui interfère avec l'onde issue du
transducteur 1. L'onde résultante est donc la somme des ondes générées par chaque
transducteur.
Tx 1
Tx 2
im pulsio n po sit iv e à
t = t0
im pulsio n po sit iv e à
t = t0 + e /c
t0
t0 + e /ct0 + e /c
e
po la risa tio ns pie zo
m ilie u de pro pa ga tio nm ilie u a rriè re
Figure VI-1 : Principe de l'excitation d'empilements de transducteurs.
124
Une étude préliminaire [89] a montré la faisabilité de cette technique. Une pression de
2.5 MPa d'amplitude a été générée, mais aucun test de vieillissement n'a été mené. La
conception d'un générateur piézo-électrique d'ondes de choc de faibles dimensions basé sur ce
principe n'a donc pas été envisagée lors de cette étude.
Par ailleurs, suite à ces travaux, la société Richard Wolf GmbH a également débuté
l'exploration de cette voie de recherche en concevant une tête de tir de petites dimensions
grâce à l'utilisation d'empilements de transducteurs. Des mesures du champ acoustique émis
ont été présentées [90] mais, à l'heure actuelle, aucune étude de fragmentation in vitro ou in
vivo n'a été rendue publique.
L'objet de ce chapitre est de présenter nos travaux qui ont été réalisés dans ce domaine.
2 Etude théorique d'empilements de transducteurs
2.1 Introduction
Pour un fonctionnement idéal du mode de fonctionnement proposé, qui utilise des
empilements de transducteurs, il faudrait que chaque transducteur soit vu par le second
comme une simple couche passive. C'est uniquement dans ce cas que la pression obtenue à la
surface de la lame sera la somme de la pression émise par chaque transducteur. Or, en théorie,
chaque transducteur réagit face à l'onde qui se propage en son sein. Lorsque l'onde provenant
du transducteur arrière atteint le transducteur avant, celui-ci convertit une partie de l'énergie
acoustique reçue en énergie électrique, ce qui se traduit par une perte de pression à la surface
de la lame. De plus, cette énergie électrique, qui apparaît aux bornes du transducteur avant,
induit à son tour un déplacement de ses faces, créant une onde qui se propage dans

125
l'empilement. De même, l'onde provenant du transducteur avant induit une réaction du
transducteur arrière. Ainsi, l'impédance acoustique du transducteur arrière vue par le
transducteur avant est modifiée, ainsi que la forme de l'onde émise.
Dans le but d'étudier l'importance de ce phénomène, un modèle théorique des
empilements de transducteurs a été développé. Celui-ci est basé sur le modèle présenté dans le
chapitre 3 et se décompose en deux parties : dans la première, seul le transducteur arrière
fonctionne, tandis que dans la seconde, seul le transducteur avant est excité. La modélisation
de l'empilement, excité de la manière décrite dans l'introduction, peut être obtenue par
superposition des deux cas. Néanmoins, cette phase n'est pas nécessaire pour l'étude du
phénomène décrit.
2.2 Cas de l'excitation du transducteur arrière
Le premier cas d'étude correspond à la situation où seul le transducteur arrière est
excité. Chaque élément est, en pratique, commandé par un circuit électrique identique à celui
de la figure IV-5. L'excitation est obtenue par la décharge brutale d'un condensateur dans le
transducteur, grâce à la commutation d'un transistor, via une résistance série Rs, une
inductance série Ls et une résistance parallèle Rp. Le commutateur ne reste fermé que durant
un temps relativement court, à peu près égal au temps de vol des ultrasons dans l'épaisseur du
matériau. Lorsque le commutateur est fermé, la résistance Rp, beaucoup plus importante que
la résistance Rs, peut être négligée. Dans le cas contraire, le schéma électrique se ramène à la
seule résistance Rp. Ainsi, le cas où seul le transducteur arrière fonctionne a été modélisé
selon le schéma de la figure VI-2.

126
Tr 1 Tr 2 Lam e
M il ieuarrière
R s LRp
E
Figure VI-2 : Modélisation du cas où seul le transducteur arrière est excité.
Grâce à la méthode présentée dans le chapitre 3, le courant traversant le transducteur
arrière et le déplacement de ses faces a été calculé à chaque pas temporel. Les réflexions de
l'onde générée dans le transducteur arrière, le transducteur avant et la lame ont été
déterminées, ainsi que la tension apparaissant aux bornes du transducteur avant. Puis, le
courant traversant le transducteur avant, fonction de Rp, a été calculé. Le déplacement des
faces du transducteur avant et les réflexions successives de l'onde générée, dans la structure
de l'empilement, ont donc pu être obtenus. Ainsi, les déplacements de chaque interface sont la
somme du déplacement dû aux réflexions de l'onde générée par le transducteur arrière et du
déplacement dû aux réflexions de l'onde générée par la réaction du transducteur avant.
Les transducteurs sont constitués de matériau composite B, dont la description est
donnée dans le chapitre IV, § 3.1, résonnent à une fréquence de 720 kHz et ont un diamètre de
20 mm. La lame λ/2 a une impédance acoustique de 4 MRayl. Le milieu de propagation est
constitué d'eau tandis que le milieu arrière est composé d'air. Les valeurs des composants Rs,
Rp et Ls sont respectivement de 200 Ω, 15 kΩ et 50 µH.
De manière a étudier l'influence de la résistance Rp sur la réaction du transducteur
avant, le rapport de l'énergie électrique débitée par celui-ci, caractéristique de l'énergie
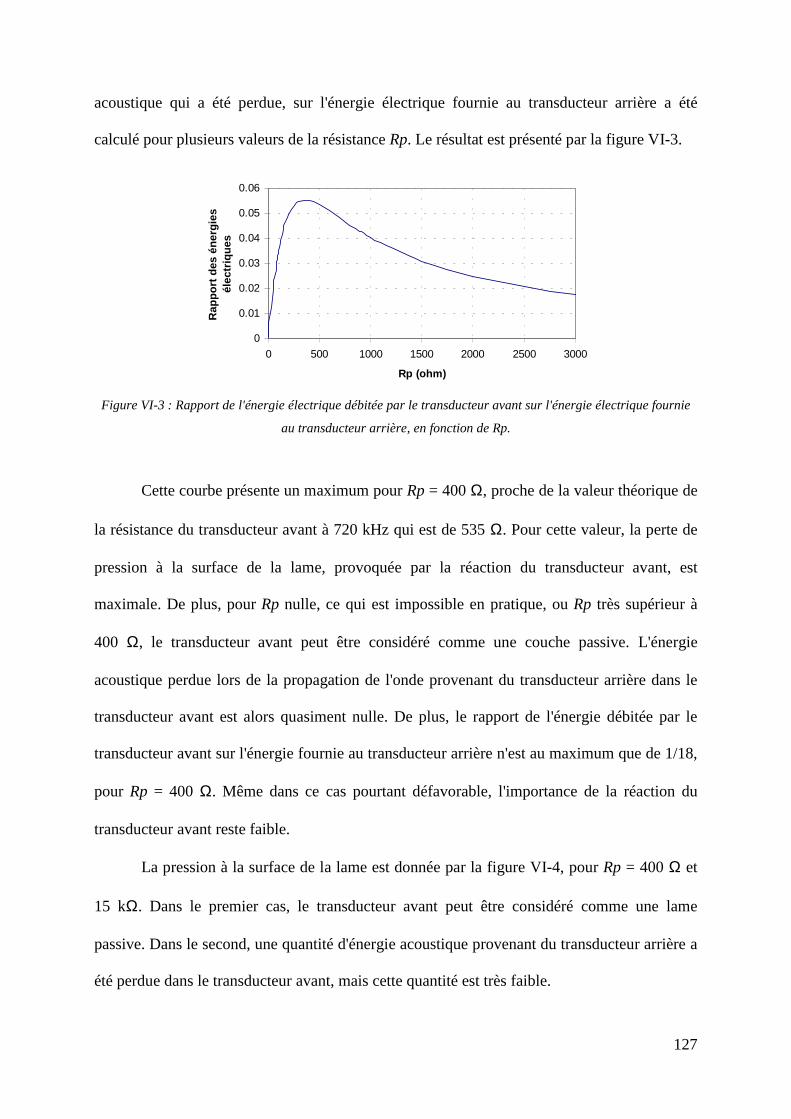
127
acoustique qui a été perdue, sur l'énergie électrique fournie au transducteur arrière a été
calculé pour plusieurs valeurs de la résistance Rp. Le résultat est présenté par la figure VI-3.
0
0.01
0.02
0.03
0.04
0.05
0.06
0 500 1000 1500 2000 2500 3000
Rp (ohm)
Rap
port
des
éne
rgie
s él
ectr
ique
s
Figure VI-3 : Rapport de l'énergie électrique débitée par le transducteur avant sur l'énergie électrique fournie
au transducteur arrière, en fonction de Rp.
Cette courbe présente un maximum pour Rp = 400 Ω, proche de la valeur théorique de
la résistance du transducteur avant à 720 kHz qui est de 535 Ω. Pour cette valeur, la perte de
pression à la surface de la lame, provoquée par la réaction du transducteur avant, est
maximale. De plus, pour Rp nulle, ce qui est impossible en pratique, ou Rp très supérieur à
400 Ω, le transducteur avant peut être considéré comme une couche passive. L'énergie
acoustique perdue lors de la propagation de l'onde provenant du transducteur arrière dans le
transducteur avant est alors quasiment nulle. De plus, le rapport de l'énergie débitée par le
transducteur avant sur l'énergie fournie au transducteur arrière n'est au maximum que de 1/18,
pour Rp = 400 Ω. Même dans ce cas pourtant défavorable, l'importance de la réaction du
transducteur avant reste faible.
La pression à la surface de la lame est donnée par la figure VI-4, pour Rp = 400 Ω et
15 kΩ. Dans le premier cas, le transducteur avant peut être considéré comme une lame
passive. Dans le second, une quantité d'énergie acoustique provenant du transducteur arrière a
été perdue dans le transducteur avant, mais cette quantité est très faible.

128
-800
-600
-400
-200
0
200
400
600
800
0 1 2 3 4 5 6
t (µs)
Pre
ssio
n (P
a)
Rp=400 Ohm
Rp=15 kOhm
Figure VI-4 : Pression à la surface de la lame pour Rp=400Ω et Rp=15kΩ.
Enfin, la tension apparaissant aux bornes du transducteur avant (Tr2) et le courant
débité par celui-ci dans la résistance parallèle sont donnés par la figure VI-5, pour Rp = 400 Ω
(figure VI-5a) et 15 kΩ (figure VI-5b).
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0 1 2 3 4 5 6
t (µs)
Ten
sion
Tr2
(V
)
-0.3
-0.2
-0.1
0
0.1
0.2
0 1 2 3 4 5 6
t (µs)
-0.0003-0.0002-0.0001
00.00010.00020.00030.0004
0 2 4 6
t (µs)
Cou
rant
Tr2
(A
)
(a)
-0.000015
-0.00001
-0.000005
0
0.000005
0.00001
0.000015
0 2 4 6
t (µs)
(b)
Figure VI-5 : Tension et courant débités dans la résistance Rp par le transducteur avant, pour Rp=400Ω (a) et
Rp=15kΩ (b).
La tension est la plus élevée pour Rp = 15 kΩ, mais le courant est alors très faible. Les
charges électriques apparues aux bornes du transducteur avant ne peuvent s'écouler dans la

129
résistance. Cette énergie électrique ne peut donc être convertie en énergie mécanique. Le
transducteur avant se comporte comme une lame passive, du point de vue du transducteur
arrière.
2.3 Cas de l'excitation du transducteur avant
De la même manière que dans la partie précédente, le cas où seul le transducteur avant
fonctionne a été modélisé selon le schéma de la figure VI-6. Les caractéristiques de
l'empilement et des circuits électriques d'excitation sont les mêmes que précédemment.
T r 1 Tr 2 Lam e
M il ieuarrière
R sLRp
E
Figure VI-6 : Modélisation du cas où seul le transducteur avant est excité.
Le rapport de l'énergie électrique débitée par le transducteur arrière sur l'énergie
fournie au transducteur avant est représenté en fonction de la résistance Rp par la figure VI-7.
Cette courbe est très proche de la courbe obtenue lorsque seul le transducteur arrière
fonctionne. Son maximum apparaît pour Rp = 300 Ω et correspond également à une rapport
de 1/18. La perte d'énergie acoustique provenant du transducteur avant lors de la propagation
de l'onde dans le transducteur arrière est donc très faible, même dans le cas le plus

130
défavorable. Pour une valeur de Rp très supérieure à 300 Ω, le transducteur arrière peut être
considéré comme une couche passive lorsque seul le transducteur avant est excité.
0
0.01
0.02
0.03
0.04
0.05
0.06
0 500 1000 1500 2000 2500 3000
Rp (ohm)
Rap
port
des
éne
rgie
s él
ectr
ique
s
Figure VI-7 : Rapport de l'énergie électrique débitée par le transducteur arrière sur l'énergie électrique fournie
au transducteur avant, en fonction de Rp.
La pression à la surface de la lame est donnée par la figure VI-8, pour Rp = 300 Ω et
15 kΩ. La première arche est identique dans les deux cas, puisqu'elle provient de l'onde émise
par la face avant du transducteur avant. Des différences très faibles sont ensuite visibles entre
les pressions obtenues pour les deux valeurs de résistance.
-800
-600
-400
-200
0
200
400
600
800
1000
0 1 2 3 4 5 6
t (µs)
Pre
ssio
n (P
a)
Rp=300 Ohm
Rp=15 kOhm
Figure VI-8 : Pression à la surface de la lame pour Rp=300Ω et Rp=15kΩ.
Enfin, la tension apparaissant aux bornes du transducteur arrière (Tr1) et le courant
débité par celui-ci dans la résistance parallèle sont donnés par la figure VI-9, pour Rp = 300 Ω
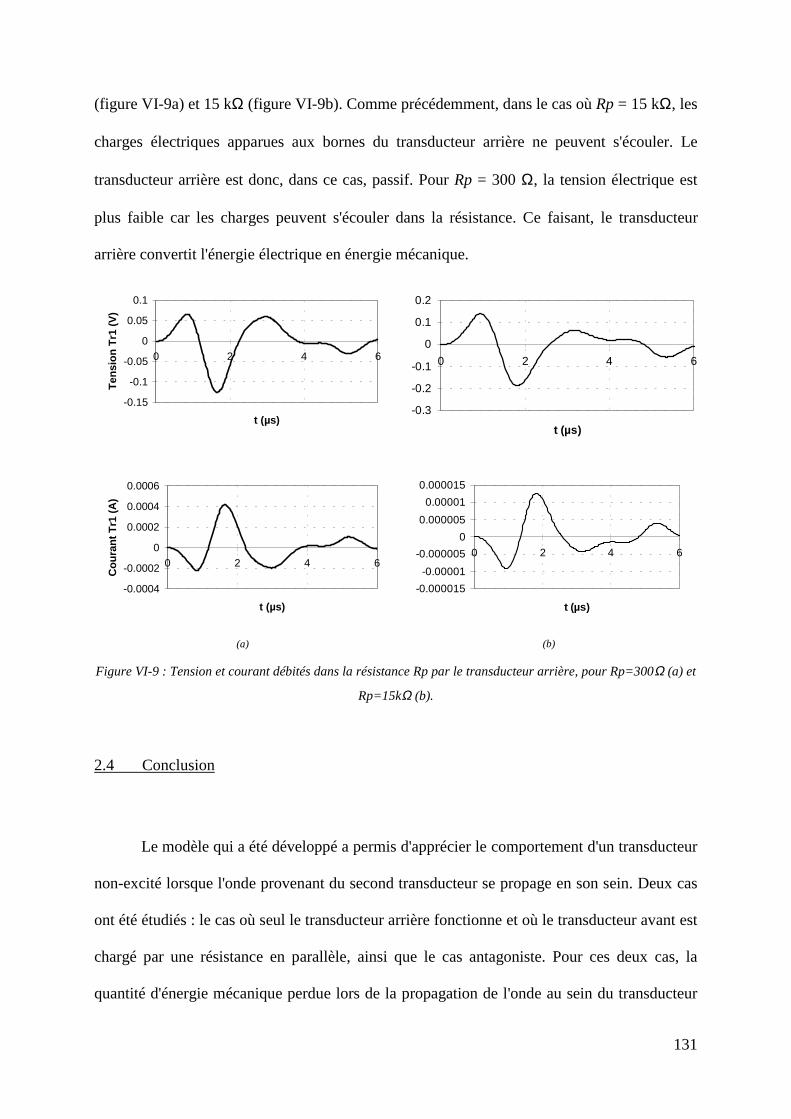
131
(figure VI-9a) et 15 kΩ (figure VI-9b). Comme précédemment, dans le cas où Rp = 15 kΩ, les
charges électriques apparues aux bornes du transducteur arrière ne peuvent s'écouler. Le
transducteur arrière est donc, dans ce cas, passif. Pour Rp = 300 Ω, la tension électrique est
plus faible car les charges peuvent s'écouler dans la résistance. Ce faisant, le transducteur
arrière convertit l'énergie électrique en énergie mécanique.
-0.15
-0.1
-0.05
0
0.05
0.1
0 2 4 6
t (µs)
Ten
sion
Tr1
(V
)
-0.3
-0.2
-0.1
0
0.1
0.2
0 2 4 6
t (µs)
-0.0004
-0.0002
0
0.0002
0.0004
0.0006
0 2 4 6
t (µs)
Cou
rant
Tr1
(A
)
(a)
-0.000015
-0.00001
-0.000005
0
0.000005
0.00001
0.000015
0 2 4 6
t (µs)
(b)
Figure VI-9 : Tension et courant débités dans la résistance Rp par le transducteur arrière, pour Rp=300Ω (a) et
Rp=15kΩ (b).
2.4 Conclusion
Le modèle qui a été développé a permis d'apprécier le comportement d'un transducteur
non-excité lorsque l'onde provenant du second transducteur se propage en son sein. Deux cas
ont été étudiés : le cas où seul le transducteur arrière fonctionne et où le transducteur avant est
chargé par une résistance en parallèle, ainsi que le cas antagoniste. Pour ces deux cas, la
quantité d'énergie mécanique perdue lors de la propagation de l'onde au sein du transducteur

132
non-excité dépend de la valeur de la résistance Rp. Lorsque cette valeur est proche de la
valeur de la résistance du transducteur à sa fréquence de résonance, la perte d'énergie est
maximale. Cependant, même dans le cas le plus défavorable, peu d'énergie mécanique est
perdue en comparaison de l'énergie émise. De plus, pour des valeurs de Rp très supérieures à
la résistance du transducteur, celui-ci peut être considéré comme une couche passive. Dans ce
cas, la pression obtenue à la surface de la lame est la somme des pressions générées par
chaque transducteur.
3 Etudes préliminaires avec de la colle à l'argent
Plusieurs empilements ont été assemblés dans le but de mener une étude préliminaire
de vieillissement en génération de fortes amplitudes de pression. Pour ce faire, seuls les
moyens disponibles au laboratoire ont été utilisés. Devant les bons résultats des tests de
transducteurs avec report d'électrodes réalisé avec de la colle à l'argent (chapitre 5, § 2.2.),
celle-ci a été utilisée pour coller des transducteurs sans électrode entre eux tout en assurant le
rôle de l'électrode centrale. Un problème technique de taille est rapidement apparu : la
mauvaise polymérisation de la colle située entre les deux transducteurs. En effet, selon le
fabricant de colle, Epotechny, USA, la présence d'halogène dans la phase passive des
transducteurs composites gêne la polymérisation de la colle. Ce phénomène, renforcé par le
fait que les gaz peuvent difficilement s'échapper de l'espace inter-transducteurs, est
responsable de la mauvaise polymérisation de la colle, en particulier au centre de
l'assemblage. De plus, la mise en étuve, préconisée par le fabricant, est souvent impossible
aux températures recommandées en raison du risque de dépolarisation des transducteurs.
Différentes méthodes de collage ont été testées, comme le collage direct, l'application
et le séchage d'une couche de colle sur chaque transducteur avant l'assemblage par collage (les
133
couches sèches étaient sensées isoler les halogènes contenus dans le matériau composite de la
colle servant à assembler les transducteurs). Plusieurs colles à l'argent de provenance
différentes (Epotechny, Emerson & Cuming, USA) ont été utilisées. Néanmoins, les mauvais
résultats obtenus ont conduit à l'abandon total de cette technique d'assemblage.
Deux solutions ont donc été testées pour assembler les transducteurs : l'assemblage par
collage classique avec des résines époxydes de transducteurs munis d'un report d'électrodes
réalisé par dépôt de cuivre et le serrage mécanique de tels transducteurs dans un bain d'huile.
Ces deux techniques se distinguent de l'utilisation de la colle à l'argent par le fait que
l'assemblage des transducteurs et l'électrode centrale ne sont pas réalisés par le même
matériau.
4 Etude d'empilements assemblés par collage classique
4.1 Matériel et méthodes
Trois empilements de deux transducteurs, de références F105, F106 et F107, ont été
fabriqués par Imasonic selon le schéma de la figure VI-10. Chaque transducteur est muni
d'une rondelle de résine sur laquelle les électrodes sont reportées. Les fils sont donc soudés
sur des surface non actives. Des encoches ont été pratiquées dans la résine pour laisser le
passage des fils, au nombre de deux par plan électrique. Les barreaux céramiques des deux
transducteurs n'ont pas été alignés entre eux au moment de l'assemblage.

134
Figure VI-10 : Empilements fabriqués par Imasonic.
Les transducteurs, en matériau de type C, ont une fréquence de résonance de 720 kHz
et ont été assemblés par collage. Leur diamètre actif est de 20 mm.
Ces empilements ont été excités par deux montages électriques identiques à celui de la
figure IV-5. Le retard entre les deux excitations est commandée par un générateur HP 8116A.
Les tests ont été réalisés dans un bain d'huile de ricin.
Les empilements F105 et F106 ont été testés en vieillissement par paliers selon le
protocole décrit dans le chapitre 4. L'empilement F107 a subi un vieillissement de 4 millions
de tirs à 4 MPa.
4.2 Résultats et discussion
Bien qu'aucune attention particulière ait été portée à l'alignement des barreaux
céramiques des deux couches de matériau composite, la pression mesurée à la surface des
transducteurs est bien la somme des pressions issues de chaque transducteur.

135
Les résultats obtenus sont résumés par la table VI-1. Les empilements F105 et F106
ont atteint des pressions respectives de 4.5 et 8.5 MPa. L'empilement F107 a pu générer 4
MPa pendant 4 millions de tirs, puis a amorcé au bout de 2.5 millions de tirs à 5 MPa.
L'empilement F105 a été détruit par un amorçage à travers le transducteur arrière, ainsi
que le F106. Le F107 a lui été détruit par amorçage du transducteur avant. Pour tous les
empilements, la lame a pu être retirée très facilement et a emporté toute la surface du cuivre
de l'électrode avant, comme il avait déjà été observé pour les transducteurs simples.
L'empilement F107 a été détruit par amorçage du transducteur avant. Par ailleurs, l'analyse
des empilements F105 et F106 a montré que les transducteurs étaient décollés l'un de l'autre
après le test. Un décollement dû aux tirs peut être responsable d'un amorçage entre les deux
transducteurs menant à leur destruction. En effet, en cas de décollement, il est probable qu'une
poche de vide se forme au centre du montage, créant des contraintes acoustiques très
importantes au sein des transducteurs étant donné le gradient d'impédance acoustique entre le
vide et les transducteurs.
Empilement F105 F106 F107
Type de test Paliers Paliers 4 millions à 4 MPa
Résultat 4.5 MPa
(amorçage transducteur arrière)
8.5 MPa
(amorçage transducteur arrière)
Succès + 2.5 millions de tirs à 5 MPa
(amorçage transducteur avant)
Table VI-1 : Résultats obtenus avec les empilements collés.
Comparés aux résultats obtenus sur transducteurs simples (chapitre 5), ces résultats
n'ont pas l'ampleur escomptée. En effet, les vieillissement de 4 millions de tirs à 4 MPa
avaient réussi pour la moitié des transducteurs testés, et en vieillissement par paliers, des
pressions de 8, 7, 5.5 et 6 MPa avaient été atteintes. Pourtant, dans le cas des empilements, la
tension électrique appliquée sur chaque transducteur est deux fois plus faible pour générer la

136
même pression qu'un transducteur simple. La limite en pression des empilements semble donc
indépendante de la tension électrique, mais liée à des contraintes d'origine mécanique.
5 Empilements assemblés par serrage
5.1 Matériel et méthodes
Quatre empilements ont également été réalisés par serrage. La société Imasonic a
fabriqué 4 transducteurs en matériau C avec milieu arrière et 4 transducteurs avec lame
d'adaptation qui ont ensuite été assemblés au laboratoire selon le schéma de la figure VI-11.
Les transducteurs résonnent à une fréquence de 720 kHz et leur diamètre actif est de 20 mm.
Figure VI-11 : Assemblage d'un empilement par serrage.
Des fils ont été soudés sur les zones non actives des transducteurs avant et arrière, puis
ceux-ci ont été assemblés dans un bain d'huile de ricin, afin d'éviter la présence de bulles d'air
entre les deux transducteurs. Un disque de PVC, percé pour laisser passer les ondes, maintient
137
le transducteur avant contre le transducteur arrière monté dans un support. Le disque presse
très légèrement sur les transducteurs grâce à 8 vis régulièrement réparties sur la périphérie du
montage. Une mesure sommaire de la contrainte appliquée entre les deux transducteurs a
montré que la pression statique était comprise entre 62450 Pa et 137400 Pa. Celle-ci est donc
négligeable devant les objectifs de pressions dynamiques à générer. Une arête permet de
maintenir l'ensemble du montage au centre de la cuve d'huile de ricin.
Les quatre empilements ont été testés pendant 4 millions de tirs à 4 MPa. En cas de
succès, le test est répété à 5 MPa, et ainsi de suite.
De manière à comparer les résultats obtenus avec ces empilements avec les
performances de transducteurs monocouches, cinq transducteurs simples ont également été
testés de la même manière. Ces transducteurs résonnent à une fréquence de 720 kHz et ont un
diamètre actif de 20 mm.
5.2 Résultats et discussion
Comme précédemment, la pression mesurée à la surface des transducteurs est la
somme des pressions générées par chaque couche active, bien que les barreaux céramiques de
chaque couche de matériau composite ne soient pas alignés entre eux.
Tous les transducteurs simples ont effectué avec succès 4 millions de tirs à 4 MPa et
ont été détruits après quelques centaines de milliers de tirs (700 000 au maximum) à 5 MPa.
Les résultats obtenus avec les empilements sont donnés par la table VI-2. Deux
empilements ont atteint 8 MPa après plus de 16 millions de tirs au total, ce qui est
considérable par rapport aux transducteurs testés jusqu'à présent. Les deux autres empilements
ont amorcé à 7 et 6 MPa après respectivement 13.6 et 15.2 millions de tirs. Ces résultats sont
largement supérieurs à ceux qui ont été obtenus avec les transducteurs simples.

138
Empilement 1 2 3 4
Résultat 7 MPa 8 MPa 8 MPa 6 MPa
Nombre total de tirs effectués 13.6 millions 16.15 millions 16.4 millions 15.2 millions
Table VI-2 : Résultats obtenus avec les empilements serrés.
6 Conclusion
Tous les transducteurs testés ont montré que la pression obtenue à la surface est la
somme des pressions issues de chaque transducteur, même si les barreaux céramiques ne sont
pas alignés entre eux.
Les essais de vieillissement sur des empilements réalisés par collage n'ont pas donné
de résultats supérieurs aux transducteurs monocouches, que ce soit par paliers ou en
vieillissement de 4 millions de tirs à 4 MPa. Il a été à nouveau constaté une mauvaise
adhérence de la lame sur l'électrode du transducteur avant, puisque dans tous les cas la lame a
pu être facilement détachée après le test, en emportant tout le cuivre de l'électrode.
Néanmoins, seul un empilement a été détruit par amorçage du transducteur avant. Dans deux
empilements sur trois, les transducteurs étaient décollés l'un de l'autre à la fin du test, ce qui
est probablement à l'origine de leur rupture.
Les résultats obtenus par les empilements réalisés par serrage dans de l'huile de ricin
sont largement supérieurs aux résultats obtenus par des transducteurs monocouches. Des
performances jamais atteintes lors d'essais de transducteurs simples ont été obtenues avec ce
type d'empilements. Il est probable que le serrage dans l'huile permet de s'affranchir des
problèmes de décollements de transducteurs. En effet, une fine pellicule d'huile de ricin les
sépare, évite qu'une poche de vide ne se forme entre les transducteurs et accepte la répartition
non uniforme des déplacements à la surface des deux transducteurs.

139
139
Conclusion
Les lithotriteurs piézo-électriques possèdent des avantages indéniables sur les
technologies concurrentes en terme de douleur, de maintenance et de perspectives d'évolution.
Cependant, leurs dimensions en font des machines peu adaptées à la tendance actuelle du
marché de la lithotritie qui tend à favoriser les machines de petites tailles conçues dans un
souci de modularité. Dans le but de réduire les dimensions de ces machines, la pression
générée à la surface des transducteurs piézo-électriques doit être augmentée. L'objectif de
cette thèse était de développer les transducteurs élémentaires qui équipent les générateurs
piézo-électriques dans l'optique de fabriquer une coupelle de dimensions réduites.
Tout d'abord, une étude bibliographique, présentée dans le chapitre 1, a permis de
préciser les avantages et les inconvénients respectifs des différentes technologies utilisées
pour la génération des ondes de choc en lithotritie et de présenter les caractéristiques de
plusieurs générateurs piézo-électriques existant. Des mesures du champ acoustique émis par
trois lithotriteurs électro-conductif, piézo-électrique et électromagnétique commercialement
disponibles, qui font l'objet du chapitre 2, ont permis de préciser la situation de la technologie
piézo-électrique par rapport à ses concurrentes. A l'heure actuelle, les transducteurs qui
équipent les coupelles piézo-électriques génèrent au maximum une impulsion de 1.3 MPa
d'amplitude et de 1.4 µs de durée, correspondant à une fréquence de résonance de 360 kHz.
Malgré le diamètre important des coupelles, d'environ 500 mm, l'énergie acoustique au point
focal et donc le pouvoir de fragmentation sont faibles en comparaison des lithotriteurs de
technologies concurrentes. Les mesures réalisées ont permis de préciser les objectifs à
atteindre. Un transducteur capable de générer une impulsion de pression de 3 MPa
d'amplitude à la surface et de 2.5 µs de durée, correspondant à une fréquence de résonance de
200 kHz, devrait permettre le développement d'un générateur de 220 mm de diamètre avec un

140
pouvoir de fragmentation proche de celui des lithotriteurs électro-conductifs et
électromagnétiques.
Les matériaux utilisés dans les machines aujourd'hui disponibles ne permettent pas
d'augmenter la pression générée. Cependant, un certain nombre de matériaux ont depuis été
développés et pourraient probablement permettre de générer une pression plus élevée. En
particulier, il a été montré que les matériaux piézo-composites pouvaient être utilisés pour la
génération d'ondes de choc. Une étude expérimentale de comparaison des performances de
plusieurs matériaux céramiques et composites dans une application à la génération d'ondes de
pression de fortes amplitude, présentée dans le chapitre 4, a donc été menée. Ce travail a tout
d'abord été l'occasion de présenter un nouveau mode d'excitation des transducteurs piézo-
électriques permettant la génération d'une onde unipolaire dont la durée est égale au double du
temps de vol des ultrasons. Ainsi, le fonctionnement du transducteur est optimisé, puisque
seule la première arche de pression participe à la formation de l'onde de choc. Afin de faciliter
la conception des systèmes d'excitation des transducteurs dans le contexte du mode de
fonctionnement proposé, un modèle des transducteurs piézo-électriques a été développé,
permettant de prendre en compte la présence du commutateur dont le comportement varie au
cours du temps. Cet outil, présenté dans le chapitre 3, a d'ailleurs été utilisé tout au long de ce
travail de thèse pour la conception des systèmes d'excitation des transducteurs. L'étude
expérimentale de comparaison des matériaux céramiques et composites a permis de montrer
que les matériaux composites testés étaient très supérieurs pour une application à la
génération d'ondes de choc. Les trois matériaux testés sont équivalents en terme de tenue en
tension, mais les types B et C possèdent en plus l'avantage d'avoir une sensibilité très élevée.
De plus, l'observation de la rupture de ces matériaux a mis en évidence plusieurs points
faibles responsables de la destruction des transducteurs, comme la tenue des électrodes de
cuivre ou le type d'amenée de courant.

141
Enfin, différentes conceptions de transducteurs ont été proposées dans le chapitre 5
pour améliorer leur tenue à la génération d'ondes de pression de fortes amplitudes, en tenant
compte des observations de rupture. L'amenée de courant par report des électrodes sur une
zone non active, permettant de souder les fils sur une surface non vibrante, a donné de très
bons résultats. Les picots d'accrochage de la lame, qui réduisent le risque de décollement du
cuivre, ont également permis d'améliorer les performances des transducteurs, bien que dans
une moindre mesure. Des problèmes de reproductibilité des résultats ont été mis en évidence,
qui ne permettent pas à l'heure actuelle de tirer le meilleur partie de la présence des picots
d'accrochage. Ces conceptions ont alors été appliquées à des maquettes de coupelles qui ont
permis d'étudier la faisabilité d'un prototype satisfaisant aux objectifs fixés. Une coupelle de
80 mm de diamètre, d'un rayon de courbure de 180 mm et résonant à une fréquence de 360
kHz, a pu générer une impulsion de pression de 2 MPa d'amplitude à la surface et de 2.8 µs de
durée pendant 4 millions de chocs. Bien que ces performances soient plus faibles que les
objectifs fixés, une étude sommaire de la fragmentation de billes de plâtre a donné des
résultats très satisfaisants.
Par ailleurs, dans le but d'augmenter la pression générée à la surface, des empilements
de deux transducteurs ont également été étudiés. Dans cette configuration, les transducteurs
sont excités avec un intervalle de temps relatif tel que les ondes générées par chaque couche
interfèrent de manière constructive à l'interface entre le transducteur et le milieu de
propagation. Tout d'abord, une étude théorique a montré que si la résistance placée en
parallèle sur le transducteur était suffisamment élevée, un transducteur non excité pouvait être
considéré comme une simple lame du point de vue du transducteur excité. De plus, même
dans le cas le plus défavorable, la perte d'énergie acoustique lors de la propagation d'une onde
dans un transducteur non excité est faible. Plusieurs conceptions différentes de tels
empilements ont été étudiés expérimentalement. Des transducteurs simplement maintenus l'un

142
contre l'autre sans collage ont montré que de tels empilements permettaient d'améliorer
sensiblement les performances des transducteurs.
Plusieurs voies de recherche nécessitent d'être approfondies pour améliorer encore ces
résultats. Une attention particulière doit être portée au processus de fabrication des
transducteurs composites, afin de réduire le nombre de défauts et d'augmenter la tenue des
électrodes de cuivre sur le matériau. Cependant, le travail qui a été réalisé permet d'envisager
la fabrication d'une coupelle piézo-électrique d'ondes de choc d'environ 200 mm de diamètre
et dont les performances devraient être similaires à celles des générateurs électro-conductifs et
électromagnétiques.

143
143
Références
[1] Domart A. Larousse de la médecine, Santé, Hygiène. Paris : Librairie Larousse,
1971. 576p.
[2] Flam T. Aspects cliniques de la lithiase urinaire. Innov. Tech. Biol. Med., 2000, Vol.
21, n° 1, pp. 11-13.
[3] Doré B., Lefebvre O., Hubert J. Vers une révision de la classification des calculs
urinaires. Prog. Urol., 1999, Vol. 9, n° 5, pp. 23-37.
[4] Jungers P., Cathala N., Dussol B., Daudon M. Lithiases rénales sévères et
insuffisances rénale. Prog. Urol., 1999, Vol. 9, n° 5, pp 91-95.
[5] Daudon M. et Amiel J. Epidémiologie de la lithiase. Prog. Urol., 1999, Vol. 9, n° 5,
pp. 5-16.
[6] Delius M. Lithotripsy. Ultrasound in Med. & Biol., 2000, Vol. 26, Suppl. 1, pp. S55-
S58.
[7] Ponchon T., Lambert R. Lithotritie biliaire extra et intra-corporelle – première
partie : Bases physiques. Gastroenterol. Clin. Biol., 1988, Vol. 12, pp. 814-822.
[8] El Fahiq S., Wallace D. M. Ultrasonic lithotriptor for urethral and bladder stones.
British Journal of Urology, 1978, Vol. 50, pp. 255-256.
[9] Watanabe H. A prototype apparatus for microexplosion cystolithotripsy. Tohoku J.
exp. Med., 1980, Vol. 132, pp. 243-244.

144
[10] Fair H. D. In vitro destruction of urinary calculi by laser induced stress waves.
Medical Instrumentation, 1978, Vol. 12, n° 2, pp. 45-50.
[11] Comisarow R. H., Barkin M. Electrohydraulic cystolitholapaxy. Can. J. Surg.,
1979, Vol. 22, n° 6, pp. 525-526.
[12] Rieber F. Shock wave generator. USA, Brevet n° US2559227, 1951.
[13] Eisenmenger W. Eine elektromagnetische Impulsschallquelle zur Erzeugung von
Druckstössen in Flüssigkeiten und Festkörpern. In Proc. of the Third International Congress
on Acoustics, Amsterdam, July 1961. Amsterdam: Elsevier, 1962, pp. 326-334.
[14] Haeusler E., Kiefer W. Anregung von stosswellen in flüssigkeiten durch
hochgeschwindigkeitswassertropfen. Verhand D. Physikal. Gesell., 1971, Vol. 6, pp. 786.
[15] Chaussy C., Brendel W., Schmiedt E. Extracorporeally induced destruction of
kidney stones by shock waves. Lancet, 1980, Vol. 2, pp. 1265-1268.
[16] Chaussy C. Extracorporeal shock wave lithotripsy. Basel : Karger, 1986. 158p.
[17] Wilbert D. M., Reichenberger H., Noske E., Riedmiller H., Alken P., Hohenfellner
R. New generation shock wave lithotripsy. J. Urol., 1987, Vol. 138, n° 9, pp. 563-565.
[18] Thibault P-H., Dory J., Cotard J-P., Moreillon J-Y., Vallencien G. Lithotripsie à
impulsions ultra-courtes. Etude expérimentale sur une lithiase rénale du chien. Ann. Urol.,
1986, Vol. 20, pp.20-25.
[19] Kuwahara M. A. Clinical application of extracorporeal shock wave lithotripsy
using microexplosions. J. Urol., 1987, Vol. 137, pp. 837-840.
145
[20] Coptcoat M. J., Miller R. A., Wickham J. E. A. Lithotripsy II. The definitive
textbook of second generation extracorporeal shockwave lithotripsy. London: BDI
Publishing, 1987. 199p.
[21] Lechevallier E., Meria P., Conort P., Ferriere J-M., Dore B. Néphrolithotomie
percutanée. Prog. Urol., 1999, Vol. 9, n° 5, pp. 63-73.
[22] Meria P., Le Duc A. Stratégie thérapeutique dans les calculs urinaires. In Encycl.
Med. Chir. Techniques chirurgicales – Urologie-Gynécologie. Paris : Elsevier, 1994. pp. 41-
90.
[23] Lingeman J. E., Woods J., Toth P. H., Evan A., McAteer J. The role of lithotripsy
and its side effects. J. Urol., 1989, Vol. 141, pp. 793-797.
[24] Cathignol D., Tavakkoli J., Mestas J-L. Lithotritie extracorporelle. Innov. Tech.
Biol. Med., 2000, Vol. 21, n° 1, pp. 4-10.
[25] Mestas J-L., Martin X., Theillère Y., Dubernard J-M., Cathignol D. Ondes de choc
et localisation ultrasonore en lithotritie extra-corporelle. Journal d'échographie et de
médecine par ultrasons, 1987, Vol. 8, pp. 279-287.
[26] Chaussy C., Schmiedt E., Jocham D., Fuchs G., Brendel W., Forssmann B., Hepp
W. Extracorporeal shock wave lithotripsy, Technical concept, Experimental research,
Clinical applications. Basel : Karger, 1987. 155p.
[27] Jocham D., Chaussy C., Schmiedt E. Extracorporeal shock wave lithotripsy. Urol.
Int., 1986, Vol. 41, pp. 357-368.
146
[28] Mestas J-L., Chapelon J-Y., Lenz P., Cathignol D., Dubernard J-M. Réalisation
d'un générateur d'ondes de choc : Application à la destruction des calculs rénaux in vivo.
Innov. Tech. Biol. Med., 1982, Vol. 5, pp. 572-581.
[29] Cathignol D., Mestas J-L., Gomez F., Lenz P. Influence of water conductivity on
the efficiency and the reproducibility of electrohydraulic shock wave generation. Ultrasound
in Med. & Biol., 1991, Vol. 17, n° 8, pp. 819-828.
[30] Cathignol D., Mestas J-L. The focal zone of the electrohydraulic generator is much
larger than the piezoelectric one, why?. In Proc. of IEEE Eng. in Med. & Biol. Symposium,
Paris, 29 October – 1 November 1992. Oxford : Butterworth-Heinemann Ltd., 1992. Vol. 1,
pp. 360-361.
[31] Cathignol D., Mestas J-L., Gomez F. Reproducibility of the shock waves improves
when electrolyte is used in electrohydraulic generators, why?. In Proc. of Ultrasonics
International 91 Conference, Le Touquet, France, 1-4 July 1991. Oxford : Butterworth-
Heinemann Ltd., 1991. pp. 65-68.
[32] Andriyanov Y. V., Andriyanova O. N., Kozodoi P. V. An electromagnetic acoustic
shock wave generator. Instruments and Experimental Techniques, 1999, Vol. 42, n° 2, pp.
254-260.
[33] Marlinghaus E. H., Wess O. J., Katona J. A new pressure wave generator for
extracorporeal lithotripsy. In Proc. of 12th International Symposium on Nonlinear Acoustics,
Austin, Texas, 27-31 August 1990. Barking : Elsevier Science Publishers Ltd., 1990. pp. 439-
444.
[34] Saussine C., Candau C. Les fragments résiduels après lithotritie extra-corporelle
(LEC). Prog Urol., 1999, Vol. 9, n° 5, pp. 43-51.

147
[35] Bierkens A. F., Hendrikx A. J. M., de Kort V. J. W., de Reyke T., Bruynen C. A.
H., Bouve E. R., Beek T. V. D., Vos P., Berkel H. V. Efficacy of second generation
lithotriptors : a multicenter comparative study of 2,206 extracorporeal shock wave lithotripsy
treatments with the Siemens Lithostar, Dornier HM4, Wolf Piezolith 2300, Direx Tripter X-1
and Breakstone lithotriptors. Journ. Urol., 1992, Vol. 148, n° 9, pp. 1052-1057.
[36] Psihramis K. E., Jewett M. A. S., Bombardier C., Caron D., Ryan M., The Toronto
lithotripsy associates. Lithostar extracorporeal shock wave lithotripsy : the first 1,000 patients.
J. Urol., 1992, Vol. 147, n° 4, pp. 1006-1009.
[37] Amiel J., Chevallier D., Quintens H., Peyrottes A., Benizri E., Touabi K., Toubol J.
La lithotritie piézo-électrique exclusive (EDAP LT-01) dans le traitement des calculs de plus
de 30 mm. Journal d'Urologie, 1991, Vol. 97, n° 2, pp. 99-102.
[38] Nouri M., Tligui M., Haab F., Flahaut A., Gattegno B., Thibault P. Facteurs
prédictifs du succès du traitement des calculs caliciels inférieurs par lithotritie extra corporelle
EDAP LT-02. Prog. Urol., 2000, Vol. 10, n° 4, pp. 529-536.
[39] Tritrakarn T., Lertakyamanee J., Koompong P., Soontrapa S., Somprakit P.,
Tantiwong A., Jittapapai S. Both EMLA and placebo cream reduced pain during
extracorporeal piezoelectric shock wave lithotripsy with the Piezolith 2300. Anaesthesiol.,
2000, Vol. 92, n° 4, pp. 1049-1054.
[40] Robert M., Lanfrey P., Guiter J., Navratil H. LEC piézo-électrique des calculs de
l'uretère. Influence de la topographie et des mensurations lithiasiques sur les modalités et
performances thérapeutiques. Prog. Urol., 2000, Vol. 10, pp. 397-403.
148
[41] Flam T., Saighi D., Thiounn N., Bourlion M., Chiche R., Zerbib M., Debré B.
Lithotritie électroconductive : résultats expérimentaux et cliniques du Sonolith 4000. Journal
d'Urologie, 1994, Vol. 100, n° 6, pp. 283-289.
[42] Preston R. C. Standards and measurements. Ultrasound in Med. & Biol., 2000, Vol.
26, Supplement 1, pp. S63-S67.
[43] Coleman A. J., Saunders J. E. Comparison of extracorporeal shock wave
lithotripters (based on measurements in the acoustic field). In: M. J. Coptcoat, R. A. Miller, J.
E. A. Wickham, eds. Lithotripsy II. Textbook of second generation lithotripsy. London: BDI
Publishing, 1987, pp. 121-131.
[44] Coleman A. J., Saunders J. E. A survey of the acoustic output of commercial
extracorporeal shock wave lithotripters. Ultrasound in Med. & Biol., 1989, Vol. 15, n° 3, pp.
213-227.
[45] Buizza A., dell'Aquila T., Giribona P., Spagno C. The performance of different
pressure pulse generators for extracorporeal lithotripsy : a comparison based on commercial
lithotripters for kidney stones. Ultrasound in Med. & Biol., 1995, Vol. 21, n° 2, pp. 259-272.
[46] Granz B., Köhler G. Quantitative assignment of shock wave parameters to stone
disintegration in lithotripsy. In Proc. of Ultrasonics International 91 Conference, Le Touquet,
1-4 July 1991. Oxford : Butterworth-Heinemann Ltd., 1991. pp. 61-64.
[47] Dreyer T., Riedlinger R. E., Steiger E. Experiments on the relation of shock wave
parameters to stone disintegration. In Proc. of International Congress on Acoustics, Seattle,
20-26 June 1998. New York : IEEE, 1998. pp. 2811-2812.
[48] Dory J., EDAP. Ultrasonic pulse apparatus for destroying calculi. USA, Brevet n°
US4617931, 1986.
149
[49] Schaefer D., Richard Wolf GmbH. Ultrasonic transducer having piezoelectric
transducer elements. USA, Brevet n° US5101133, 1992.
[50] Bauer E., Kraus W., Saelzler S., Richard Wolf GmbH. Electroacoustic transducer
generating focused sound waves for lithotripsy. Allemagne, Brevet n° DE19543741, 1997.
[51] Dreyer T., Riedlinger R. E. Transient response of cylindrical piezoceramics used in
self focusing transducers for therapy. In Proc. of the IEEE Trans. Ultrason., Ferroelect.,
Freq. Contr. symposium, Lake Tahoe, 1999. New York : IEEE, 1999. pp. 1245-1248.
[52] Cathignol D., Birer A., Nachef S., Chapelon J-Y. Electronic beam steering of shock
waves. Ultrasound in Med. & Biol., 1995, Vol. 21, n° 3, pp. 365-377.
[53] Tavakkoli J., Birer A., Arefiev A., Prat F., Chapelon J-Y., Cathignol D. A
piezocomposite shock wave generator with electronic focusing capability : application for
producing cavitation-induced lesions in rabbit liver. Ultrasound in Med. & Biol., 1997, Vol.
23, n° 1, pp. 107-115.
[54] Prada C. Retournement temporel des ondes ultrasonores – application à la
focalisation. Thèse de doctorat en Acoustique Physique, Université Paris VII, France, 1990.
115p.
[55] Thomas J-L. Miroir à retournement temporel – focalisation itérative en milieu
hétérogène – application à la lithotritie. Mémoire de DEA d'Electronique, Université Paris
VI, France, 1990. 39p.
[56] Kawai H. The piezoelectricity of poly(vinylidène fluoride). Jpn. J. Appl. Phys.,
1969, Vol. 8, pp. 975-976.

150
[57] Bauer F. PVDF shock sensors : applications to polar materials and high explosives.
IEEE Trans. Ultrason., Ferroelect., Freq. Contr., 2000, Vol. 47, n° 6.
[58] Selfridge A., Goetz P. Ellipsoidal hydrophone with improved characteristics. In
Proc. of IEEE Ultrasonics Symposium, Lake Tahoe, 17-20 October 1999. New York : IEEE,
1999. pp.1181-1184.
[59] Tavakkoli J., Birer A., Cathignol D. Development of a PVDF low-cost shock-wave
hydrophone. Shock Waves, 1996, Vol. 5, pp. 369-374.
[60] Mestas J-L., Cathignol D. Capteurs de pression pour le contrôle de générateurs
d'ondes de choc électrohydrauliques. In Proc. Premier congrès français d'acoustique, Lyon,
10-13 April 1990. Les Ulis, France : Les éditions de physique, 1990. pp. 1287-1290.
[61] Staudenraus J., Eisenmenger W. Fibre-optic probe hydrophone for ultrasonic and
shock-wave measurements in water. Ultrasonics, 1993, Vol. 31, n° 4, pp. 267-273.
[62] Koch C. Coated fiber-optic hydrophone for ultrasonic measurement. Ultrasonics,
1996, Vol. 34, pp. 687-689.
[63] Koch C., Molkenstruck W., Reibold R. Shock-wave measurement using a
calibrated interferometric fiber-tip sensor. Ultrasound in Med. & Biol., 1997, Vol. 23, n° 8,
pp. 1259-1266.
[64] Cathignol D., Tavakkoli J., Birer A. and Arefiev A. Comparison between the
effects of cavitation induced by two different pressure-time shock waveform pulses. IEEE
Trans. Ultrason., Ferroelect., Freq. Contr. , 1998, Vol. 45, n° 3, pp. 788-799.
[65] Tavakkoli J., Cathignol D. and Souchon R. Modeling of pulsed finite-amplitude
focused sound beams in time domain. J. Acoust. Soc. Am., 1998, Vol. 104, pp. 2061-2072.
151
[66] Eisenberger F., Miller K. and Rassweiler J. Stone Therapy in Urology. New York :
Thieme Medical Publishers, Inc., 1991. 155p.
[67] Bourlion M. Design and characterization of a shock wave generator using
canalized electrical discharge : Application to lithotripsy. Rev. Sci. Instrum., 1994, Vol. 65,
pp. 2356-2363.
[68] Redwood M. A study of waveforms in the generation and detection of short
ultrasonic pulses. Applied Materials Research, April 1963, pp. 76-83.
[69] Yamaguchi K. New method of time domain analysis of the performance of
multilayered ultrasonic transducers. IEEE Trans. Sonics and Ultrason., 1986, Vol. 33, n° 6,
pp. 669-678.
[70] Mason W. P. Piezoelectric crystals and their applications to ultrasonic. New
York : D. Van Nostrand ed., 1950.
[71] Coursant R. H. Les transducteurs ultrasonores. Acta Electron., 1978, Vol. 22, n° 2,
pp. 129-141.
[72] Sittig E. K. Transmission parameters of thickness-driven piezoelectric transducers
arranged in multilayer configurations. IEEE Trans. Sonics and Ultrason., 1967, Vol. 14, n° 4,
pp. 167-174.
[73] Dion J-L. Exact one-dimensional computation of ultrasonic transducers with
several piezoelectric elements and passive layers using the transmission line analogy. IEEE
Trans. Sonics and Ultrason., 1997, Vol. 44, n° 5, pp. 1120-1131.
152
[74] Powell D. J., Hayward G. and Ting R. Y. Unidimensional modeling of multi-
layered piezoelectric transducer structures. IEEE Trans. Sonics and Ultrason., 1998, Vol. 45,
n° 3, pp. 667-677.
[75] Chapelon J-Y., Ribault M., Birer A. Treatment of localised prostate cancer with
transrectal high intensity focused ultrasound. European J. Ultrasound, 1999, Vol. 9, pp. 31-
38.
[76] Lakestani F. Etude théorique et expérimentale de transducteurs ultrasonores
piezoélectriques fonctionnant dans le domaine du mégahertz. Thèse I.N.S.A. Lyon, 1984.
208p.
[77] Rougny E., Cathignol D., Chapelon J-Y., Querleux B. and Leveque J-L. The use of
a thick focused piezoelectric transducer unipolar wave. In Proc. of Acoustical Imaging Symp.,
Bochum, Germany, april 3-5, 1991. New York : Plenum Press, 1991. pp. 283-287.
[78] Nachef S., Brissaud M. and Noterman D. Identification tridimensionnelle des
paramètres complexes des disques céramiques piézo-électriques. Acustica, 1992, Vol. 77, pp.
209-220.
[79] Cathignol D., Blanc E., Chapelon J-Y. Use of at least one composite piezoelectric
transducer in the manufacture of a n ultrasonic therapy apparatus for applying therapy, in a
body zone, in particular to concretions, to tissue, or to bones, of a living being and method of
ultrasonic therapy. USA, Brevet n° US5316000, 1994.
[80] Chapelon J-Y., Cathignol D., Cain C., Ebbini E., Kluiwstra J-U., Sapozhnikov O.
A., Fleury G., Berriet R., Chupin L. and Guey J-L. New piezoelectric transducers for
therapeutic ultrasound. Ultrasound in Med. and Biol., 2000, Vol. 26, n° 1, pp. 153-159.
153
[81] Lide D. R. Handbook of chemistry and physics, 79th edn. New York : CRC Press,
1998. Vol. 15, p. 31.
[82] Cathignol D., Sapozhnikov O.A. and Theillère Y. Comparision of acoustic fields
radiated from piezoceramic and piezocomposite focused radiators. J. Acoust. Soc. Am., 1999,
Vol. 105, n° 5, pp. 2612-2617.
[83] Cathignol D., Sapozhnikov O. A. and Zhang J. Lamb waves in piezoelectric
focused radiator as a reason for discrepancy between O'Neil's formula and experiment. J.
Acoust. Soc. Am., 1997, Vol. 101, n° 3, pp. 1286-1297.
[84] O'Leary R. L. and Hayward G. Investigation into the effects of modification of the
passive phase for improved manufacture of 1-3 connectivity piezocomposite transducers.
IEEE Trans. Ultrason., Ferroelect., Freq. Contr., 1999, Vol. 46, pp. 511-516.
[85] Adachi K., Ogasawara I., Tamura Y., Makino M. and Kato N. Influence of static
prestress on the characteristics of bolt-clamped Langevin-type transducers. Jpn. J. Appl.
Phys., 1998, Vol. 37, n° 5, pp. 2982-2987.
[86] Bodholt H. Pre-stressing a Tonpilz transducer. J. Acoust. Soc. Am., 1995, Vol. 98,
n° 2, pp. 1225-1227.
[87] Smith W. A. The role of piezocomposites in ultrasonic transducers. In Proc. of
IEEE Ultrasonics Symposium, Montréal, 3-6 October 1989. New York : IEEE, 1989. pp. 755-
766.
[88] Smith W. A. Design of piezocomposites for ultrasonic transducers. Ferroelectrics,
1989, Vol. 91, pp. 155-162.
154
[89] Sferruzza J-P., Birer A., Cathignol D. Generation of very high pressure pulses at
the surface of a sandwiched piezoelectric material. Ultrasonics, 2000, Vol. 38, n° 10, pp. 965-
968.
[90] Dreyer T., Krauss W., Bauer E., Riedlinger R. E. Investigations of compact self
focusing transducers using stacked piezoelectric elements for strong sound pulses in therapy.
In Proc. of the IEEE Trans. Ultrason., Ferroelect., Freq. Contr. Symposium, San Juan,
Puerto Rico, October 2000. New York : IEEE, 2001. pp. 1239-1242.