digital art of bas-relief sculpting - max-planck-institut f¼r informatik
TRANSCRIPT

Max-Planck-Institut fur InformatikComputer Graphics GroupSaarbrucken, Germany
Digital Art of Bas-Relief Sculpting
Master Thesis in Computer Science
Computer Science DepartmentUniversity of Saarland
Jens Kerber
Supervisor: Prof. Dr. Hans-Peter Seidel (1st reviewer)Advisor: Prof. Dr. Alexander Belyaev (2nd reviewer)
Max-Planck-Institut fur InformatikComputer Graphics GroupSaarbrucken, Germany


Statement
Hereby I confirm that this thesis is my own work and that I have documentedall sources used.
Saarbrucken, July 31, 2007
Jens Kerber


Declaration of Consent
Herewith I agree that my thesis will be made available through the library ofthe Computer Science Department.
Saarbrucken, July 31, 2007
Jens Kerber

Abstract
In this thesis, we present a semi-automatic method for the generation of bas-reliefs
from a given shape. A Bas-reliefs is an artistic sculptural representation of a three
dimensional scene which possesses a negligible depth.
The main idea behind our method is to work with a range image, whose depth
interval size is compressed in a feature preserving way. Our approach operates in
the gradient domain, whereas we also present an extension which works on the
Laplacian. The algorithm relies on the achievements of High-Dynamic-Range-
Compression and adapts necessary elements to our purpose.
We manipulate the partial derivatives of the range image rather than the image
data itself. These derivatives are compressed by applying an attenuation function
which leads to a relative convergence of the entries. By a feature enhancing tech-
nique we boost small details in order to keep them perceivable in the result. In the
end, the compressed and enhanced partial derivatives are recombined to the final
bas-relief.
The results exhibit a very small depth range but still contain perceptually im-
portant details. A user can specify the desired compression ratio and steer the
relevance of small features in the outcome. The approach is intuitive, fast and
works very well for high compression ratios as experiments have shown.
Possible applications are of artistic nature like sculpting, embossment, engrav-
ing or carving.
i

ii ABSTRACT

Acknowledgement
First, I would like to thank Alexander Belyaev for assigning this interesting project
to me and for his great supervision.
Special thanks to Hans-Peter Seidel for providing an excellent working envi-
ronment in his research group.
I am also grateful to the members of the computer graphics department at the
MPII who were at the right place to the right time and gave me helpful suggestions
when I got stuck; especially Zhao Dong, Dorotea Dudas, Wenhao Song, Carsten
Stoll, Hitoshi Yamauchi and Wenxiang Ying (in alphabetical order).
I would like to thank Mathias Pohl and Werner Schwinn who have proofread
this thesis.
Finally, I am indebted to my family who gave me the opportunity to study and
always supported and encouraged me, although they suffered under my absence.
iii

iv ACKNOWLEDGEMENT

Contents
Abstract i
Acknowledgement iii
1 Introduction 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Goal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Fundamentals . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.4 Thesis Outline . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Related Work 7
2.1 High-Dynamic-Range-Compression . . . . . . . . . . . . . . . . 7
2.2 Bas-Reliefs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Virtual Shape Decoration . . . . . . . . . . . . . . . . . . . . . . 11
3 Gradient Domain Approach 13
3.1 Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.1 Overview . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.1.2 Background Detection . . . . . . . . . . . . . . . . . . . 14
3.1.3 Decomposition . . . . . . . . . . . . . . . . . . . . . . . 15
3.1.4 Thresholding . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1.5 Attenuation . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.1.6 Unsharp Masking . . . . . . . . . . . . . . . . . . . . . . 20
3.1.7 Poisson Problem . . . . . . . . . . . . . . . . . . . . . . 22
3.1.8 Post Processing . . . . . . . . . . . . . . . . . . . . . . . 23
v

vi CONTENTS
3.2 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.1 Parameters . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.2.2 Performance . . . . . . . . . . . . . . . . . . . . . . . . 31
3.3 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4 Laplacian Domain Approach 35
4.1 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.1.1 Performance . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5 Discussion & Conclusion 43
5.1 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.2 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.3 Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44

List of Figures
1.1 Ancient artistic examples . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Modern artistic examples . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Linear rescaling . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 High-Dynamic-Range-Compression . . . . . . . . . . . . . . . . 8
2.2 Related Work Results . . . . . . . . . . . . . . . . . . . . . . . . 11
3.1 Algorithm workflow . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Input data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.3 1D Gradient‘ . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4 2D Gradient images . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.5 Modified gradient . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.6 Attenuation function . . . . . . . . . . . . . . . . . . . . . . . . 19
3.7 Unsharp masking results . . . . . . . . . . . . . . . . . . . . . . 22
3.8 Bas-relief . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.9 Distortion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3.10 Armadillo bas-relief details . . . . . . . . . . . . . . . . . . . . . 26
3.11 More gradient domain results I . . . . . . . . . . . . . . . . . . . 27
3.12 More gradient domain results II . . . . . . . . . . . . . . . . . . 28
3.13 Thresholding influence . . . . . . . . . . . . . . . . . . . . . . . 29
3.14 Unsharp masking influence . . . . . . . . . . . . . . . . . . . . . 30
3.15 Low-high frequency relation . . . . . . . . . . . . . . . . . . . . 30
4.1 Laplacian and threshold . . . . . . . . . . . . . . . . . . . . . . . 36
4.2 Attenuation and enhancement . . . . . . . . . . . . . . . . . . . . 37
vii
viii LIST OF FIGURES
4.3 Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.4 Different perspectives . . . . . . . . . . . . . . . . . . . . . . . . 39
4.5 More results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40

List of Tables
3.1 Runtime table gradient approach . . . . . . . . . . . . . . . . . . 31
4.1 Runtime table Laplacian approach . . . . . . . . . . . . . . . . . 41
ix

x LIST OF TABLES

Chapter 1
Introduction
This thesis begins with definitions and an explanation of the problem setting. Then
we describe the contribution of our approach. After that we introduce and ex-
plain some basics and nomenclature. At the end of this introduction we present a
prospect of how this thesis is further structured.
1.1 Motivation
Figure 1.1: a Persian relief portraying a hunt (left); a corridor wall of the Bud-dhistic temple Borobudur in Java, Indonesia (right); both images courtesy of [29]
A relief is a sculptured artwork where a modeled form projects out from a flat
background [29]. There are two different kinds of reliefs. One is the so called
high-relief or alto-relievo which allows that objects may stand out significantly
1

2 CHAPTER 1. INTRODUCTION
from the background or are even completely detached from it. This kind of relief
is not further considered here.
A bas-relief or basso-relievo is carved or embossed into a flat surface and only
hardly sticks out of the background. Bas-reliefs are of a small height and give the
impression of a three dimensional scene if they are viewed from an orthogonal
vantage point. They have been used by artists for centuries to decorate surfaces
like stone monuments, coins or vases. Figure 1.1 shows some artwork examples
from different cultures.
Today, in the time of 3D printers, automatic milling devices and laser carvers,
bas-reliefs are used in many different areas like the decoration of dishes and bot-
tles, the production of dies or seals in order to mark products with a company
logo and they are still applied in coinage and the creation of modern pieces of art.
Figure 1.2 contains some more recent examples.
Figure 1.2: modern coin showing Max Planck (left); huge stone carving in StoneMountain, Georgia, USA (right); both images courtesy of [29]
Let us suppose that we are given an arbitrary synthetic model and want to
create an embossment of it on a metallic plate. The problem is that in most cases
the depth of the model exceeds the thickness of the material. Hence, in order to
make this embossment possible, it is necessary to compress the spatial extend of
the object to a fractional amount of its initial size.
At first glance, this seems to be quite simple, because one could apply global
linear rescaling which serves the needs. However, the feature preservation of this
methods is very poor. Figure 1.3 shows the Stanford armadillo model [15] and a

1.1. MOTIVATION 3
Chinese liondog [1] as well as their linearly rescaled version and the correspond-
ing results of our approach. In the linearly rescaled case, the viewer can only see
the outline and estimate the global shape, which appears to be very flat. Due to
the lack of visually important details in the outcome, this naive approach is not
applicable. Whereas, our result still contains small features which give a precise
impression of the constitution of the object’s surface.
Figure 1.3: In the left column the initial model is shown; the middle column con-tains the results after using the naive linear rescaling approach for a compressionto 2% of its former extend; the outcome of our method is shown on the right, notethat they are compressed to the same amount; the details in the middle imagesare almost not perceivable, whereas the reliefs generated by our algorithm exhibitmany small features like the different muscle parts and the mail structure for thearmadillo or the hair and the claws of the liondog

4 CHAPTER 1. INTRODUCTION
This example shows that the solution to the problem of compressing the depth
of a model in a feature preserving way is not straightforward. Nevertheless, we
present a simple method to overcome this challenge.
We do not compress the height field immediately but we change its gradient.
A rescaling of the gradient components would not improve the feature preserva-
tion either. Therefore we attenuate them first, and boosts their high frequencies
afterwards. This enhancement helps us to keep small visually important details
perceivable in the result. In the end, the manipulated gradient components are
recombined to the final bas-relief.
1.2 Goal
Our aim is to provide a semi automatic system which supports an artist in produc-
ing bas-reliefs. Given a shape, we want to flatten it without losing the impression
as long as it is seen from the same vantage point. Of course, any kind of com-
pression modifies the geometry of a model, but our goal is to create a version of
smaller spatial extent which still has a similar appearance. That’s why we have to
keep the perceptually relevant details up through the compression process.
Our approach can be applied in any area of synthetic or real world shape
decoration. Examples are 3D printing, milling, embossment, sculpting, carving or
engraving.
Nowadays, it is still the case that mints design stamps for the production of
coins or medals on a CAD machine by hand from scratch. A use of synthetic data
as input is not possible yet, or it is rescaled linearly like it was described above.
Our method contributes to bridge this gap by generating virtual prototypes.
1.3 Fundamentals
Range images also called height fields or depth maps are a special class of digital
images which cover height respectively distance information based on a regular
two dimensional grid z = I(x, y). Due to the fact that this information describes
shapes in a 3D scene it is often denoted as a 2.5D representation.

1.4. THESIS OUTLINE 5
A range image can be achieved in different ways. One example is ray casting
a 3D scene, which means that for every pixel in the projection plane a ray is shot
and the distance to the first intersection with the scene is measured. If such an
intersection does not exist, the corresponding pixel will be set to a default back-
ground value. Z-buffering is a related technique. Here a given scene is rendered
with the near and far clipping plane chosen in a way that they tightly enclose
the scene, after that the z-buffer, which now contains the distance information, is
readout.
These approaches only work for virtual scenes. In contrast to that, a 3D scan-
ner can produce depth maps of a real world object from different viewpoints .
An important property of height fields is that they consist of a foreground
part, containing one or more objects, and a background part which is filled with a
default value usually very different from the foreground data.
In this thesis we exclusively describe depth compression, which means the re-
duction of a model’s depth extent. We use the words compression and compressed
only in this context. In no case, storage compression of range images, that uses
different representations in order to consume less resources, like in [6] is meant.
In the following, the term compression ratio describes the relation between
the length of the depth interval after and before the processing:
compression ratio =Maxresult − Minresult
Maxoriginal − Minoriginal
(1.1)
Here, Maxresult and Minresult represent the upper and lower boundaries of the
entries at the object pixels after the depth compression (only foreground pixels
count here). Maxoriginal and Minoriginal stand for the corresponding extrema of
the initial shape.
1.4 Thesis Outline
The next chapter contains a survey of the actual state of affairs in the area of bas-
relief generation and we study the influence of related research fields. Furthermore
the importance for different kinds of applications is investigated. In Chapter 3, we
describe the different phases of our gradient domain approach and the effects they

6 CHAPTER 1. INTRODUCTION
have on the intermediate results. We present several bas-reliefs which have been
obtained with the help of this method and analyze how the user can influence
the results. After that, the algorithm is discussed in detail and compared to other
existing bas-relief generation techniques. Chapter 4 describes how the gradient
domain approach is raised to the Laplacian domain. This extension and its differ-
ences to the method in Chapter 3 are investigated after the corresponding results
are presented. In Chapter 5 we wrap up and give an outlook on future research.
Chapter 2
Related Work
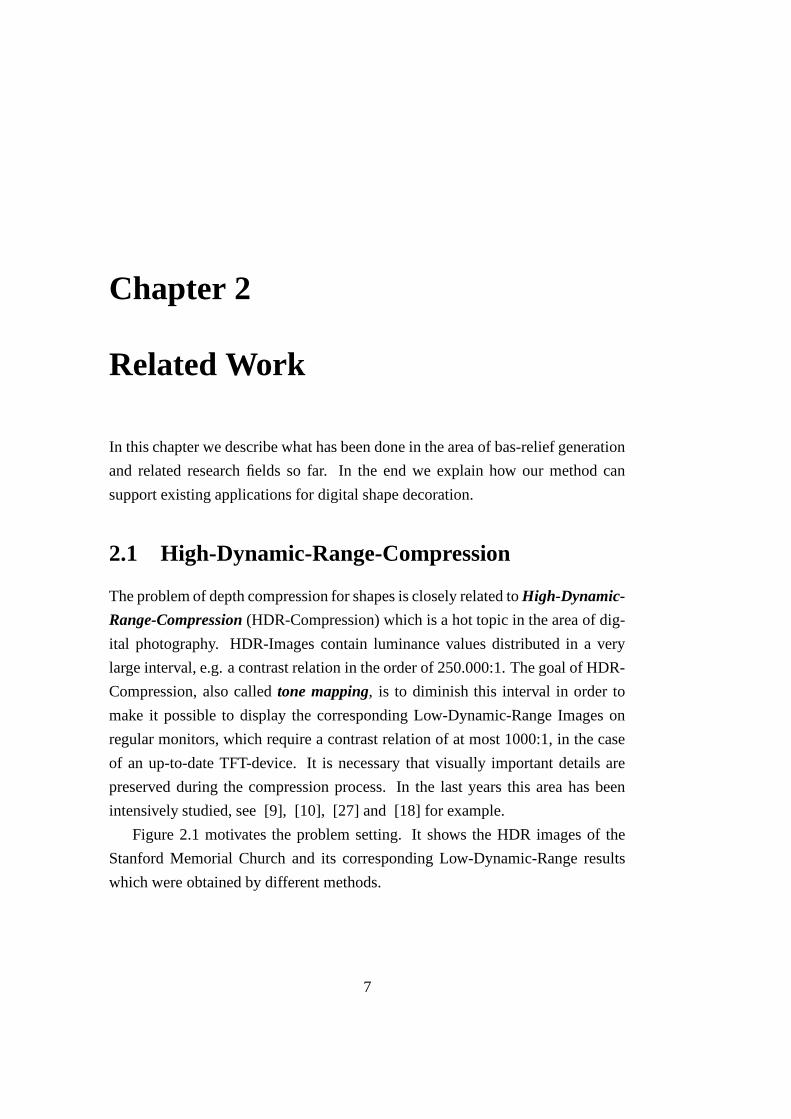
In this chapter we describe what has been done in the area of bas-relief generation
and related research fields so far. In the end we explain how our method can
support existing applications for digital shape decoration.
2.1 High-Dynamic-Range-Compression
The problem of depth compression for shapes is closely related to High-Dynamic-
Range-Compression (HDR-Compression) which is a hot topic in the area of dig-
ital photography. HDR-Images contain luminance values distributed in a very
large interval, e.g. a contrast relation in the order of 250.000:1. The goal of HDR-
Compression, also called tone mapping, is to diminish this interval in order to
make it possible to display the corresponding Low-Dynamic-Range Images on
regular monitors, which require a contrast relation of at most 1000:1, in the case
of an up-to-date TFT-device. It is necessary that visually important details are
preserved during the compression process. In the last years this area has been
intensively studied, see [9], [10], [27] and [18] for example.
Figure 2.1 motivates the problem setting. It shows the HDR images of the
Stanford Memorial Church and its corresponding Low-Dynamic-Range results
which were obtained by different methods.
7

8 CHAPTER 2. RELATED WORK
Figure 2.1: Original HDR-image (courtesy of Paul Debevec) (left); result afterapplying the method of [27] (middle); outcome of the approach of [11] (right);the details in the windows are very well reproduced in both cases, but the floorand the steps in the right image look more natural; moreover the contrast in themiddle left and upper right part of the images is better enhanced by the method of[11]
Since Bas-relief generation has to ”squeeze”a shape into the available depth
range without destroying perceptually relevant features, it can be regarded as a
geometric pendant to tone mapping.
Our method mainly relies on the pioneering work of [11]. Their main idea
is to work in the gradient domain and manipulate the partial derivatives in a way
that large magnitudes are attenuated stronger than low ones. Therefore, they use
a multi-resolution approach. In the end, they recombine the gradient components
to the new low dynamic range image.
Nevertheless, an extension of this approach to range data is not straightfor-
ward because there are significant differences between features in digital images
and features on shapes. Moreover, HDR-images are more or less continuous,
whereas depth maps consist of a foreground and a background part which leads to
problems along an object’s silhouette. These discrepancies forced us to perform
some radical changes in order to adapt the method to our needs.

2.2. BAS-RELIEFS 9
2.2 Bas-Reliefs
The effect that bas-reliefs, viewed from an orthogonal vantage point, are almost
indistinguishable from a full 3D scene is called the bas-relief ambiguity. This
phenomenon is a matter of human perception which is studied in [3]. The authors
proof that there exists a 3-parameter family of transformation from a shape to a
corresponding bas-relief such that the shading and shadowing in both cases are
identical.
As long as a viewer only changes his perspective slightly around an orthogonal
view, the impression of a full relief remains. Once a certain vantage point is
exceeded, the flattening and also distortion are revealed.
If an object is recorded from several angles under unknown lighting condi-
tions, the bas-relief ambiguity will make it hard for a computer to resolve the
shape of this object, because the solution is not unique in general, unless assump-
tions about the surface properties are made. This problem constitutes an active
area of research in computer vision [2], [26].
In contrast to that, we exploit the existence of the bas-relief ambiguity because
we want to achieve exactly the opposite. Our aim is to create a shape which
is different from an original but exhibits the same appearance. The bas-relief
ambiguity justifies our motivation that for each model such corresponding shapes
do exist.
Currently, there are four works which directly address the challenge of gener-
ating reliefs with the help of computers.
In [7] this problem is studied for the first time. The authors present simple al-
gorithms to produce bas- and high-reliefs. They introduce the idea to work with a
view dependent height field from a given 3D scene. First, they generate the range
image by z-buffering and then a perspective transformation (reciprocally propor-
tional to the depth) is applied such that objects in the background are mapped to a
smaller z-range than those closer to the foreground. This results in a kind of per-
spective foreshortening. After that, a linear scaling is applied in order to receive
the appropriate range in the result. This is the very first work in this field and the
results are great for high-reliefs but unfortunately for bas-reliefs and especially
for high compression ratios it does hardly better than linear rescaling in terms of

10 CHAPTER 2. RELATED WORK
feature preservation.
Then, for a long time this research area has completely been out of focus until
three works have appeared in the same year.
In [23] the authors describe a method to compute a bas-relief of a given mesh.
Therefore, they represent the shape in appropriate differential coordinates, then
they use a saliency measure [16] and combine it with a feature enhancing tech-
nique. In the end, the shape is rescaled and the bas-relief is reconstructed from the
corresponding differential coordinates.
Inspired by the results of [23], we developed an algorithm for range image
compression in a feature preserving way which is presented in [14]. It adapts the
main ideas of [11] to our shape processing purpose and operates in the gradient
domain. In this work, we have mainly been interested in keeping the surface
structure of an object perceivable in the generated depth compressed version. The
information about the surface structure is covered in the high frequencies of the
partial derivatives. So, we first split the image into its gradient components and
extract their high frequencies, which are then rescaled before we recombine them
to the depth compressed result. At this time, we have ignored the low frequencies.
The results of this method, look quite good but in some sense they seem unnatural
and exaggerated. This thesis is an extension of our earlier work. It addresses
some open drawbacks (see Section 3.3) and drastically improves the quality of
the outcomes.. Figure 2.2 contains a comparison.
The work of [28] provides a semi-automatic tool which assists an artist with
creating bas-reliefs. Their approach is also based on the ideas presented in [11]
and it works in the gradient domain too. A logarithmic attenuation function is
used in order to compress large gradients stronger than low ones. Then, they give
a user the possibility to treat several frequency bands in the new gradient image
individually. This requires the artist to adjust several weight-parameters. At first
glance, their approach seems to be quite similar to ours but it differs a lot in some
crucial points, as it will be discussed at the end of the next chapter.
These current works are an indication for the growing interest in this very
young research field.

2.3. VIRTUAL SHAPE DECORATION 11
Figure 2.2: Bas-relief of the armadillo and the lion vase model [1] achieved withthe apporach proposed in [23] (left), obtained by the algorithm of [14] (middle)and the result of the method presented in this thesis (right); compression ratio is2% in all cases
2.3 Virtual Shape Decoration
The area of virtual shape decoration covers several techniques, e.g. embossment,
engraving, carving or digital sculpting. Its aim is the generation of synthetic pieces
of art which cover the same styles, effects and impressions like their real world
pendants.
In [24] and [25] the authors provide a set of tools and an interactive shape
modeler which allows an artist to create synthetic embossments and wood cut-
tings. The drawback of this method is that the work is completely in the hand of a

12 CHAPTER 2. RELATED WORK
user. This is time-consuming and the quality of the results largely depends on the
skill of the artist.
Another set of tools for synthetic carving is presented in [19]. Among in-
teractive carving their approach allows two and three dimensional input to deco-
rate shapes. The authors restrict themselves to implicit surfaces and explain that,
among other techniques, ray casting is used to compute depth data from a given
3D scene but the problem of how to compress this data to an appropriate size for
their purpose is not considered.
A computer based sculpting system for the creation of digital characters for
the entertainment industry is presented in [20]. They require 3D or range data
as input, then a user has several editing options to manipulate the outcome. For
their algorithm they use adaptively sampled distance fields [12] and exploit their
properties.
In the first case our algorithm can contribute by acting as a kind of preproces-
sor, such that range data of synthetic objects can be used to produce a template
which can then be further modified, rather than working from scratch. This could
improve the quality of the results and would lead to greater success for untrained
users. If a model should be carved into another virtual object, then our method
can be used to preserve more features in the outcome or even exaggerate them.
Once range data is used as input, we can support digital sculpting by requiring
less user interaction to produce similar or even better looking results.

Chapter 3
Gradient Domain Approach
In this chapter we describe the different phases of our gradient domain bas-relief
generation method. First, we give a global survey of the algorithm and then we
explain the purpose and the contribution of each step in detail. We illustrate those
effects using the armadillo model as an example.
Later in this chapter, we present several results which have been obtained with
the help of our approach. We inspect the influence of the user adjusted parameters
and investigate the performance. Finally, the algorithm is discussed and compared
to other recent bas-relief generation methods.
3.1 Algorithm
3.1.1 Overview
The main idea of our algorithm is to work in the gradient domain like it was
proposed in [11]. The workflow shown in Figure 3.1 describes the interplay of
the different steps.
After having read a given range image I(x, y), it is split into its gradient com-
ponents Ix and Iy. A problem which naturally arises when working with depth
maps forces us to perform a thresholding in order to get rid of boundary artifacts;
this leads to Ix and Iy. Then, an attenuation function is applied in order to com-
press the interval size, and we receive Ix and Iy. The following unsharp masking
step allows a user to treat the high frequency band individually. So, an artist can
13

14 CHAPTER 3. GRADIENT DOMAIN APPROACH
Figure 3.1: Survey of the different algorithm phases
decide whether small details should be boosted or not present in the result at all.
At this stage, the new gradient components Jx and Jy of the intermediate result
are already computed. Solving a Poisson problem lets us reconstruct J with the
help of its partial derivatives. Although this range image now exhibits a very small
depth, its interval range is adapted by a global linear scaling in order to make it
suit to the given purpose, and so we receive the final bas-relief J .
3.1.2 Background Detection
An input file which has been generated with 3D scanners typically contains a
binary background mask in addition to the height data I(x, y) itself. In other cases,
e.g. ray casted or z-buffered shapes, such a binary mask B(x, y) is extracted after
having read the range image data:
B(i, j) =
{0, if I(i, j) = δ
1, else(3.1)
Here, δ represents the default background value of the depth map.
It is important that background information does not influence the further com-
putation of the foreground data. This mask helps us to distinguish which part a
pixel belongs to and is used to normalize the result in the end. Figure 3.2 shows the
initial range image and the extracted background mask for the armadillo model.

3.1. ALGORITHM 15
Figure 3.2: Initial color-coded shape (left); most salient parts are indicated by redand those further to the background are colored blue; the value range is 300 at thatstage; corresponding binary background mask (right)
3.1.3 Decomposition
In order to work in the gradient domain the partial derivatives Ix and Iy of the
height field have to be computed. They are obtained with the help of a differential
quotient in two dimensions:
Ix(i, j) ≈I(i + h, j) − I(i, j)
h(3.2)
Iy(i, j) ≈I(i, j + h) − I(i, j)
h(3.3)
In our discrete case it holds that h = 1, and so the equations shown above collapse
to a finite forward difference:
Ix(i, j) ≈ I(i + 1, j) − I(i, j) (3.4)
Iy(i, j) ≈ I(i, j + 1) − I(i, j) (3.5)
The fact that the background value is usually very different from the fore-
ground data leads to large peaks at the object’s boundary. In Figure 3.3 a 1D
signal is used to illustrate the problem.

16 CHAPTER 3. GRADIENT DOMAIN APPROACH
Figure 3.3: 1D signal with boundary and default background value (left) and cor-responding first derivative obtained by finite difference (right)
In the two dimensional case, which is shown in Figure 3.4, a viewer can only
see a thin line (exactly one pixel of width) of large values along the silhouette and
all other information inside is close to 0 relative to these discontinuities. Keeping
such jumps results in a larger depth interval and the problem that small details
will hardly be perceivable in the result. Furthermore, these peaks lead to artifacts
during the high frequency computation.
In general, this problem cannot be solved by adapting the background value in
advance. So, we have to modify Ix and Iy in a way that the outliers are eliminated.
Figure 3.4: Gradient components of the armadillo model; X-gradient (left) andY-gradient (right); both exhibit a very large value range

3.1. ALGORITHM 17
3.1.4 Thresholding
This step detaches high values form the gradient images. Therefore, a user defined
parameter τ is introduced and all pixels whose absolute value is greater than this
threshold are set to 0. First, we generate a binary threshold mask T :
T (X, i, j) =
{1, if |X(i, j)| ≤ τ
0, else(3.6)
This mask is then used to cut out the corresponding entries. The �-operator
means component-wise multiplication in this case:
Ix = T (Ix) � Ix (3.7)
Iy = T (Iy) � Iy (3.8)
Note, that this method also affects larger jumps on the object’s surface. If τ
is chosen too high, then larger gradients will form the result and smaller details
will hardly be visible. If it is chosen too small, then flat artifacts can arise during
the reconstruction step, because important information is lost. So, this parameter
gives an artist the opportunity to steer which kind of gradients should be removed
(respectively remain), but conceals the risk of cutting off too much. The influence
that τ has on the outcome is further discussed in the result section.
Neither the pixels in the background nor the peaks along the silhouette and
on the object’s surface may contribute to the further processing. Therefore we
construct a binary combined mask C with the help of B and T for which a pixel is
set to 1 if and only if it is equal to 1 in the background mask and in both threshold
masks:
C = B � T (Ix) � T (Iy) (3.9)
Figure 3.5 illustrates the effect of this step on the armadillo model. It shows
the thresholded gradient images Ix and Iy as well as the corresponding combined
mask C.

18 CHAPTER 3. GRADIENT DOMAIN APPROACH
Figure 3.5: (left and middle) Thresholded X- and Y-gradient of the armadillomodel; in this example τ = 5; note that the details of the armadillo are nowvisible in contrast to Figure 3.4 and the interval size changes drastically accordingto τ ; (right) combined binary mask; the positions of detached pixels are markedin the mask, this holds especially for the jaw in this example
3.1.5 Attenuation
Up to now, we have produced continuous gradient images.
By definition, attenuation is the reduction in amplitude and intensity of a sig-
nal [29]. In practice, this means that values of larger magnitudes have to be
diminished stronger than small entries. This relative convergence leads to a com-
pression of the remaining interval size by keeping the appearance of the signal.
There is a number of different ways in order to achieve attenuation. We have
decided to apply the function proposed in [11]. Therefore, we first construct a
weight matrix A:
A(X, i, j) =
0, ifX(i, j) = 0
a|X(i,j)|
·(
|X(i,j)|a
)b
, else(3.10)
Then, these weights are applied by component-wise multiplication and we
obtain the thresholded and attenuated gradient components Ix and Iy:
Ix = A(Ix) � Ix (3.11)
Iy = A(Iy) � Iy (3.12)
Note, that the gradients in the background and those which were detached
before remain unchanged, because zero entries are mapped to zero entries again.

3.1. ALGORITHM 19
This method needs two parameters a and b. It has the effect that absolute val-
ues above a are attenuated and those below are slightly enhanced. At first glance,
this magnification seems to be counterproductive for the purpose of compression
but it comes up with the benefit of preserving small entries by boosting them in
that way. Figure 3.6 shows the graph of the attenuation function.
Figure 3.6: The parameter ”a”of the attenuation function marks the position of the1-intersection, it is 10 in this particular example; the parameter ”b”steers how fastthe weights approach the x-axis, here it is 0.9
If a depends on the interval-constitution then the whole function will be adap-
tive because it returns different weights for the same value if it is contained in
different intervals. For all images in the following, the reference value a is chosen
10 % of the average absolute value of all unmasked pixels in X. The parameter
b which affects the compression ratio is fixed at 0.9 for all results shown in this
thesis. So, basically this attenuation step does not need any user interaction.

20 CHAPTER 3. GRADIENT DOMAIN APPROACH
3.1.6 Unsharp Masking
If a user wants to achieve a very high compression ratio, then it is likely that fine
details will hardly be perceivable in the result. The slight enhancement from the
previous step is not sufficient to overcome this problem in general. The small
features are covered in the high frequencies of the signal and that’s why the high
frequency part has to be boosted in order to emphasise the fine details and keep
them up through the procedure.
Therefore, we use the concept of unsharp masking, which is a classical tech-
nique to sharpen images that was even applied in historical photography around
the 1930’s [29]. Today unsharp masking is widely used in many areas throughout
computer graphics e.g. to enhance features in digital images [17] or meshes [13]
[8]. The main idea is to create a smoothed version of a signal and subtract it from
the original in order to obtain the high frequent part, which is then linearly scaled
by a user specified factor and added back to the low frequency component.
If the background pixels and those which have been thresholded before con-
tribute to the blurring, then some pixels in the low frequent part will be of a mag-
nitude which is too small, because there is a number of undesired 0-valued entries
in their neighbourhood. Moreover, some of the masked pixels would be given
an unpredictable value different from 0, since the smoothing kernel reaches the
foreground pixels. Both cases lead to peaks in the extracted high frequency part,
because the smoothed version of the signal exhibits values which are either higher
or lower than expected. Such discontinuities will cause artifacts in the result, so
we have to address this problem.
The most important step is the following discrete convolution. For the smooth-
ing itself we use a 2D Gaussian filter Gσ of standard deviation σ and correspond-
ing kernel size. Here, m and n are the indices of the filter in x respectively y
direction and C represents the combined binary mask obtained from Equation
3.9:
Blurσ(X, i, j) =
0, ifC(i, j) = 0P
m,nGσ(m,n)C(i−m,j−n)X(i−m,j−n)
P
m,nGσ(m,n)C(i−m,j−n)
, else(3.13)

3.1. ALGORITHM 21
The main idea of this function is that it only considers unmasked pixels in a
neighbourhood for the weighted averaging, and like in the previous step it leaves
the masked pixels untouched. The denominator is used for normalization, so that
the weights which are actually used sum up to 1.
If we use the above mentioned function in our special case, we can go on like it
is intended by regular unsharp masking. The signals are split into two components
Low and High, whereas we apply another slight smoothing to the high frequent
part in order to prevent occurring noise. After that, the weight of the high frequent
part is modified and it is added back to obtain the new partial derivatives of the
depth compressed range image, called Jx and Jy:
Low(X) = Blurσ1(X) (3.14)
High(X) = Blurσ2(X − Low(X)) (3.15)
Jx = Low(Ix) + α · High(Ix) (3.16)
Jy = Low(Iy) + α · High(Iy) (3.17)
The parameter σ1 decides how the signal is decomposed; in our examples the
value ranges from 2 to 5. In contrast to that, σ2 only serves to diminish noise and
is chosen 1 for all the results in this thesis. The new relation between the high
and low frequencies is steered by the parameter α > 0 which it depends on the
desired compression ratio or the intention of the artist. α = 1 leaves the balance
unchanged, α > 1 enhances the high frequencies whereas α < 1 impairs them.
The higher the compression, the higher α has to be set in order to keep the small
details up.
We want to accentuate that the second smoothing with σ2 is not essential.
Strictly spoken, this slight modification even destroys the idea of unsharp masking
because we only boost a part of the high frequencies since the highest ones are
eliminated. Nevertheless, experiments have shown that the results exhibit some
noise in regions with a small number of features and that the details appear to be
unnaturally sharp if the second blurring is omitted.
Figure 3.7 contains the enhanced gradient images Jx and Jy of the armadillo
model.

22 CHAPTER 3. GRADIENT DOMAIN APPROACH
Figure 3.7: Intermediate result after unsharp masking; new X-gradient (left) andY-gradient (right); compare to Figure 3.5; here α = 6, σ1 = 4 and σ2 = 1
3.1.7 Poisson Problem
The results of the last step represent the new gradient components of the bas-relief.
So far, their discontinuities have been removed, they have been compressed and
their high frequencies have been boosted.
Now, we reconstruct the depth compressed range image J from its modified
gradient G =[
Jx
Jy
]. Since the partial derivatives have been manipulated, G is
not integrable anymore, in general. Therefore, we use an optimization process in
order to find a function whose derivative is closest G in a least square sense, like
it was proposed in [11] and [28]:
J(x, y) = arg minJ
∫ ∫||∇J(x, y) − G(x, y)||2dxdy (3.18)
Whereas, ∇ =
[∂
∂x∂
∂y
]represents the vector of partial derivatives.
Reformulating the equation shown above leads to the Poisson equation:
∆J = divG (3.19)
Here, ∆ = ∇2 = ∂2
∂x2 + ∂2
∂y2 denotes the Laplace operator, and div = ∂∂x
+ ∂∂y
stands for the divergence operator.
Adapted to our discrete case this means that the Laplacian of J is given by the

3.1. ALGORITHM 23
sum of the partial derivatives of G. Due to the discrete case which we are in, they
are obtained by a finite difference again like in Chapter 3.1.3, but here it has to be
the backward difffernce in order to produce a central difference like it is defined
for the Laplacian:
∆J =∂Jx
∂x+
∂Jy
∂y(3.20)
= Jxx + Jyy (3.21)
Jxx(i, j) ≈ Jx(i, j) − Jx(i − 1, j) (3.22)
Jyy(i, j) ≈ Jy(i, j) − Jy(i, j − 1) (3.23)
(3.24)
Now, the task is to compute a function J whose Laplacian is equal to the
right hand side of Equation 3.24. The solution to this Poisson equation is a well
known and well studied problem and there are standard techniques to address it,
so it should not be discussed in detail here. One has to solve a sparse system of
linear equations and therefore the Laplace matrix itself and a boundary is required.
In our case, the boundary is given by the default background value. As further
reading we recommend [4].
This step lets us recombine both partial derivatives, and so it brings us back
form the gradient domain to a height field (spatial domain).
3.1.8 Post Processing
So far, we have produced a range image which exhibits a greatly reduced depth
interval size. Small features are preserved because the relation between high and
low frequencies has been adapted by unsharp masking.
The above mentioned parameters τ , σ1, σ2 and α lead to a compression ratio
which is unknown in advance. In order to obtain the desired depth range, we
introduce a global linear scaling factor λ > 0 which makes the bas-relief suit to

24 CHAPTER 3. GRADIENT DOMAIN APPROACH
the specific purpose. This bas-relief is called J .
λ =desired ratio
achieved ratio(3.25)
J = λ · J (3.26)
Then, we normalize the result with the help of the binary background mask B,
in a way that it ranges from 0 to a certain positive amount, whereas the background
pixels are set to 0.
Finally, we map our depth compressed height field to a regular triangulated
grid of appropriate resolution in order to visualize it as a three dimensional sur-
face. That means that the z-value of each vertex is set to the height of the cor-
responding pixel. The underlying connectivity of the vertices leads to a mesh
representation of the bas-relief. The outcomes are shown in Figure 3.8.
The careful reader might realize that the color distribution in the left part of
Figure 3.8 is very different compared to the one in Figure 3.2. In the original
the claws and the nose of the armadillo are almost on the same level whereas this
relation is heavily distorted in the result because the nose is much more salient
than the claws which, are even further to the background then the breast. In the
right image of Figure 3.8 such an effect is not perceivable because, on the one
hand it shows an almost orthogonal vantage point, and on the other hand these
differences on the surface are only visible if a very small scaling is applied to the
z-axis, since it is very flat. Another viewpoint and a different scaling reveal the
distortion, see Figure 3.9.
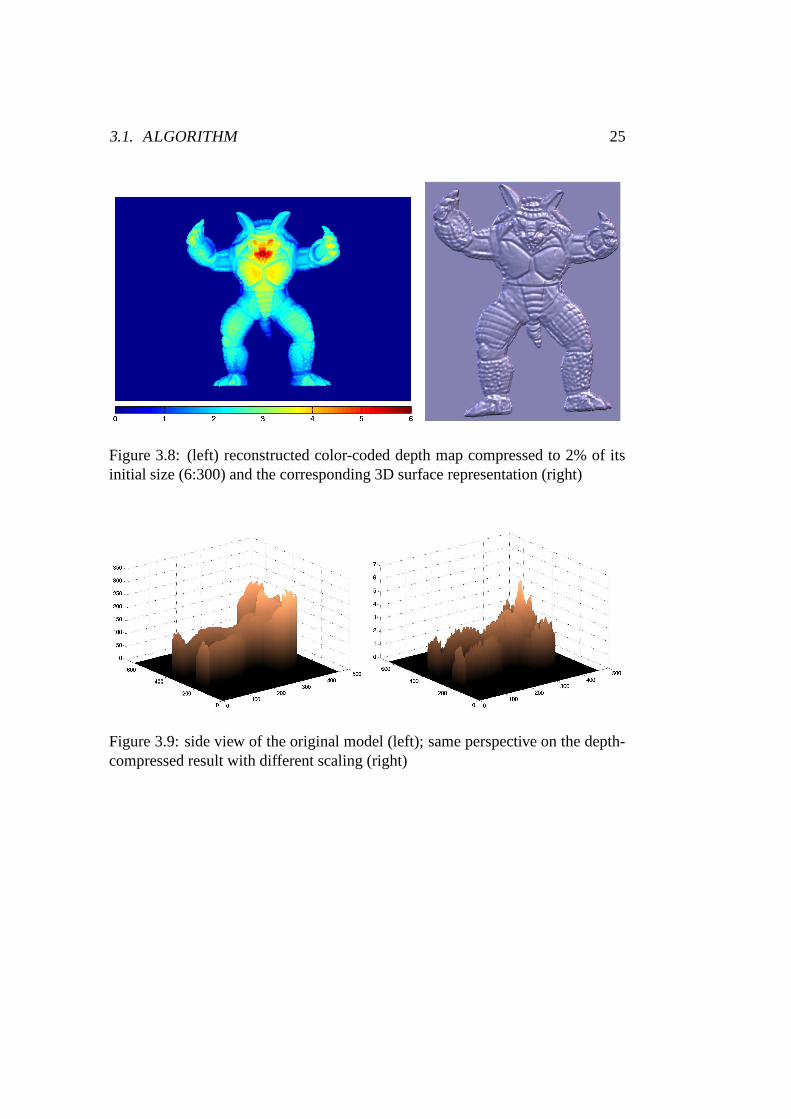
3.1. ALGORITHM 25
Figure 3.8: (left) reconstructed color-coded depth map compressed to 2% of itsinitial size (6:300) and the corresponding 3D surface representation (right)
Figure 3.9: side view of the original model (left); same perspective on the depth-compressed result with different scaling (right)

26 CHAPTER 3. GRADIENT DOMAIN APPROACH
3.2 Results
In this section we present several results which demonstrate the potential of our
algorithm. We inspect the influence which the user adjusted parameters have on
the outcome and analyze the speed of this approach.
In Figure 3.10 we present different views on the bas-relief which corresponds
directly to the result of the last chapter. Note the preservation of the fine details
and the very small height.
More results for models of different size and complexity with varying com-
pression ratios are shown in Figure 3.11 and 3.12.
Figure 3.10: (top row) For the lower leg one can recognize the fine surface struc-ture as well as the nails; the parts of the mail on the upper leg and the differentmuscles around the stomach are very well distinguishable; the claws and the de-tails on the inner part are greatly preserved; (bottom row) side view of originalrange image and three different perspectives on the result after compressing it to2% of its initial extent

3.2. RESULTS 27
Figure 3.11: (top row) original Stanford dragon model [15] and its compressedversion (ratio of 1%); (bottom row) an ornament [1] and its corresponding bas-relief compressed to 2% of its former depth, note the preservation of the order, aviewer can recognize the overlapping levels of the model and knows which part isabove or behind the other one

28 CHAPTER 3. GRADIENT DOMAIN APPROACH
Figure 3.12: a range image of a Buddhistic statue [5] (left) and the depth com-pressed model on the right (2%); note how well the low frequent features likeeyelids nose or mouth and the very high frequent structure on the head are pre-served at the same time
3.2.1 Parameters
Figure 3.13 shows the influence of the threshold parameter τ . If the value for τ
is too high, then discontinuities on the object’s surface will be preserved at the
expense of the visibility of small details. A small value for τ can lead to large
masked areas which make it hard to reconstruct the range image properly. Hence,
a meaningful setting of the threshold is required in order to find a balance between
the preservation of visually relevant details and continuity of the result.
The following two figures demonstrate the contribution of the unsharp mask-
ing step. The bas-reliefs in Figure 3.14 are produced using different values for σ1
which cause a different degree of smoothness in the outcome. Figure 3.15 demon-
strates the influence of α which steers the new relation between the high- and low
frequency part.

3.2. RESULTS 29
Figure 3.13: combined masks (top row) and corresponding results (bottom row)for τ = [75, 5, 1] from left to right (σ1 = 4, σ2 = 1, α = 6); in the left images onecan see that all inner pixels are taken into account (no difference to backgroundmask) which leads to an exaggeration of the jaw an the claws whereas the visibilityof the fine structure is impaired; the small features in the right part are betterpreserved but the loss of too much information on the coarse structure leads to flatartifacts; this holds especially for the silhouette, the jaw and the claws here; τ = 5leads to a meaningful relation

30 CHAPTER 3. GRADIENT DOMAIN APPROACH
Figure 3.14: σ1 = 15 (left); σ1 = 10 (middle); σ1 = 2 (right); for large valuesof σ1 the high frequent features are still visible but they appear to be blurred;smaller values emphasise the details but the ridges are very sharp; compare thesmoothness of the reflections along the transitions of the stomach and the breastpart; in all cases τ = 5, σ2 = 1, α = 6
Figure 3.15: from left to right α = [20, 1, 0.2] (τ = 5, σ1 = 4, σ2 = 1); theseimages show that one can exaggerate the small details (high reflections arounddetails) by choosing a high boosting factor; for the case of α = 1 it is neutraland the features are visible but very flat (almost no reflections), this correspondsto a result for which only thresholding and attenuation are applied; impairing thehigh frequencies leads to an even more schematic appearance of the whole model(right)
3.3. DISCUSSION 31
3.2.2 Performance
The MATLAB® implementation of our algorithm turns out to be quite fast, al-
though we are sure that it can be further accelerated because we have not paid
special attention to efficiency yet.
The desired compression ratio and different values for the parameters during
the attenuation do not influence the speed. In contrast to that, larger values for
the blurring parameter σ1 can cause a larger Gaussian kernel and so the discrete
convolution in the unsharp masking step takes significantly longer. If the number
of masked pixels, due to a small threshold, is high then the algorithm will be faster
because more entries can be ignored during the processing.
The reconstruction step is the most time consuming part. Solving the Poisson
equation takes more time for larger depth maps, because the system of linear
equation grows according to the resolution.
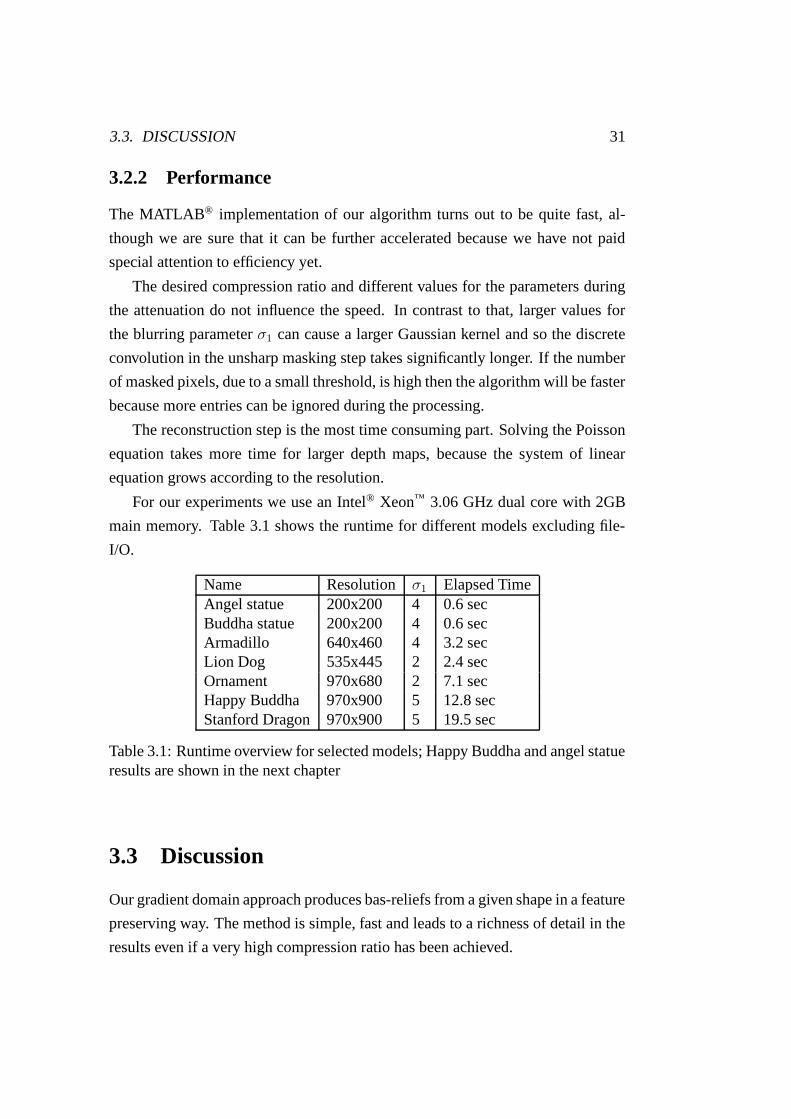
For our experiments we use an Intel® Xeon™ 3.06 GHz dual core with 2GB
main memory. Table 3.1 shows the runtime for different models excluding file-
I/O.
Name Resolution σ1 Elapsed TimeAngel statue 200x200 4 0.6 secBuddha statue 200x200 4 0.6 secArmadillo 640x460 4 3.2 secLion Dog 535x445 2 2.4 secOrnament 970x680 2 7.1 secHappy Buddha 970x900 5 12.8 secStanford Dragon 970x900 5 19.5 sec
Table 3.1: Runtime overview for selected models; Happy Buddha and angel statueresults are shown in the next chapter
3.3 Discussion
Our gradient domain approach produces bas-reliefs from a given shape in a feature
preserving way. The method is simple, fast and leads to a richness of detail in the
results even if a very high compression ratio has been achieved.

32 CHAPTER 3. GRADIENT DOMAIN APPROACH
The reader may ask why the work in the gradient domain is necessary since
almost all operations used are linear. The crucial point is the thresholding which
helps to ignore larger jumps on the objects surface. The result of attenuating,
unsharp masking and linear rescaling in the spatial domain is absolutely identical
to the outcome shown in 3.13 for the reference value τ = 75 where the visibility
of the small features is impaired because the discontinuities around the jaw are
kept.
The distortion described in Section 3.1.8 is caused by the interplay of thresh-
olding and the solution of the Poisson equation for reconstruction. It would arise
even if no attenuation, unsharp masking or linear rescaling were performed. In our
special case such a distortion is desired because it supports the correct impression
of the model from an orthogonal vantage point like it is intended for bas-reliefs.
In [28] the authors use a logarithmic weighting function for attenuation, which
needs one parameter to steer the compression ratio. The problem with this ap-
proach is that the weight only depends on the absolute value of a pixel. This
means it returns the same result for a specific magnitude, disregarding its relation
to the other entries. Suppose we are given two very different models as input. The
thresholding step can cause gradient intervals of the same size for both models
although the distribution of values inside of them is very different. If we used log-
arithmic weights, then the values in both intervals would be treated exactly in the
same way. This is why we apply the function proposed in [11] which individually
adapts to different intervals.
Another difference to the approach presented in [28] is that it gives a user the
possibility to decompose the signal into an arbitrary number of different frequency
bands, which can then be weighted individually. On the one hand this leads to
more artistic control and even allows stop-band-filtering like it is described in
[13] but on the other hand it requires the user to find meaningful weights by trial
and error. Our method is limited to two different frequency bands, because we
used the approach presented in [17] and [8]. This means that stop-band-filtering
is not possible, but we can produce good looking results in a much more user
friendly, simpler and faster way.
As mentioned earlier, the method introduced in [7] is not applicable for high
compression ratios because it scales down globally once a height field is gen-

3.3. DISCUSSION 33
erated. This means that, if the range image is compressed too much, then the
preservation of small features will be similar to the one achieved by naive linear
rescaling. In contrast to that, our algorithm preserves fine details by boosting the
high frequencies and locally taking into account the constitution of each neigh-
bourhood.
This thesis is an extension of our earlier work [14] in which we only concen-
trated on the high frequencies and ignored the low ones. This has caused several
problems in areas which exhibit only a small number of features, e.g. spherical
parts. Depending on the parameters, these regions have either been noisy or com-
pletely flattened. Hence, we include the low frequencies now, and obtain results
which look much more natural because the convexity in such areas is preserved.
Moreover, in [14] we have used global blurring, which has led to exaggerated
large and sharp ridges and other undesired artifacts, because it introduces discon-
tinuities at locations where entries have been thresholded, as it is explained in
Section 3.1.6. Currently we apply the discrete convolution function described in
Equation 3.13, in order to prevent those peaks.

34 CHAPTER 3. GRADIENT DOMAIN APPROACH

Chapter 4
Laplacian Domain Approach
For the gradient domain approach it is necessary to compute the Laplacian of
the range image in order to get back to the spatial domain. That’s why we have
thought of manipulating the Laplacian directly. To the best of our knowledge, for
the purpose of depth compression of shapes this has not been done before.
The idea behind each step is the same like in Chapter 3, but the effects which
they have are different because the Laplacian and the gradient represent different
properties of the model. In order to not repeat what has been described before,
we keep this chapter more technical and only demonstrate the differences to the
gradient domain approach. Therefore we use the armadillo model here again.
Let the height field I(x, y) be given and the binary background mask B(x, y)
be extracted like described in Section 3.1.2. We begin with the computation of
the Laplacian ∆I of the range image. By definition ∆I is the sum of the second
derivatives in both dimensions.
∆I = Ixx + Iyy (4.1)
Ixx(i, j) ≈I(i + h, j) − 2I(i, j) + I(i − h, j)
h2(4.2)
Iyy(i, j) ≈I(i, j + h) − 2I(i, j) + I(i, j − h)
h2(4.3)
Since the range images are discrete it holds again that h = 1 in our case.
35

36 CHAPTER 4. LAPLACIAN DOMAIN APPROACH
Reformulating the above mentioned equations under consideration of this fact
leads to the following approximation:
∆I ≈
0 1 0
1 −4 1
0 1 0
⊗ I (4.4)
This 3x3 filter and the large differences between foreground and background
data lead to the fact that the peaks along the silhouette have a width of 2 pixels
now. Like in Section 3.1.4 we use thresholding with reference value τ to eliminate
those outliers and obtain ∆I . B(x, y) is extended to the combined mask C(x, y)
accordingly.
∆I(i, j) =
{1, if |∆I(i, j)| ≤ τ
0, else(4.5)
Figure 4.1 shows the Laplacian of the armadillo depth map before and after
thresholding.
Figure 4.1: Initial Laplacian of the armadillo range image (left) and the corre-sponding thresholded version (right)
Then we apply the attenuation function described in Section 3.1.5 to get ∆I ,
whereas the parameter a depends on the signal constitution and b is chosen 0.9
again.

37
∆I(i, j) =
0, if∆I(i, j) = 0
a
|∆I(i,j)|·(
|∆I(i,j)|a
)b
, else(4.6)
This step is followed by unsharp masking which boosts the high frequencies
and produces the new Laplacian ∆J for the bas-relief. Therefore, the discrete con-
volution Blurσ, which has been introduced in Section 3.1.6, is used. We omit the
additional smoothing of the high frequency component here because the visibility
of very fine details in the result is impaired even for a slight blurring. The noise
reduction which could be achieved by the second smoothing is hardly perceivable
as experiments have shown, and so it plays a minor role here.
Low(∆I) = Blurσ(∆I) (4.7)
High(∆I) = ∆I − Low(∆I) (4.8)
∆J = Low(∆I) + α · High(∆I) (4.9)
The intermediate results after attenuation and unsharp masking are presented
in Figure 4.2.
Figure 4.2: Thresholded and attenuated signal (left); corresponding image afterunsharp masking (σ = 4, alpha = 100)

38 CHAPTER 4. LAPLACIAN DOMAIN APPROACH
Due to the fact that we have produced a new Laplacian directly, the recon-
struction of J can be done by solving the Poisson equation ∆J = f immediately.
Figure 4.3 contains the reconstructed, rescaled and normalized height field in a
color-coded way as well as the corresponding surface representation (see Section
3.1.8 for details).
Figure 4.3: Color-coded bas-relief (left) and its surface representation (right)
4.1 Results
The color distribution in the left part of Figure 4.3 shows that the generated bas
relief exhibits a heavy bending. This is the counterpart to the distortion in the
gradient domain approach. The bending is caused by the thresholding step and
the solution of the Poisson equation for reconstruction. In our case this bending is
undesired because it elevates the center of an object too far from the background.
Figure 4.4 contains different views on the bas-relief.
In Figure 4.5 we compare two more results of this approach with those ob-
tained by the gradient domain method.
The values for the threshold τ and the blurring parameter σ are similar to the
ones for the gradient method (τ ≈ 5, σ ≈ 4 ), whereas the enhancement factor α
is larger than 100 for the results presented in this chapter.

4.1. RESULTS 39
Figure 4.4: All three views show that the middle of the bas-relief is significantlyelevated, whereas the ears and feet stand out only slightly from the background.Especially the tail which normally belongs to the background plane is affected bythis undesired rising towards the object’s center

40 CHAPTER 4. LAPLACIAN DOMAIN APPROACH
Figure 4.5: Happy Buddha model [15] compressed with gradient domain ap-proach (left) and the corresponding bas-relief obtained by Laplacian method (mid-dle); depth compressed version of a kneeling angel statue [5] achieved with gradi-ent (top right) and Laplacian algortihm (bottom right); all models are compressedto 2% of their former spatial extend; note that the ends of the rope as well asthe rope itself, the chain, the contours of the coat and the facial expression canbe recognized for the Buddha model; the preservation of the fine structure at thewings and the hair are striking in the angel example; The Laplacian images coverall these details but the overall appearance of the gradient domain results is moreplastic and natural

4.2. DISCUSSION 41
4.1.1 Performance
Due to the fact that we only work on one image (Laplacian), we achieve an enor-
mous increase in speed, compared to the work on two different components.
Thresholding, attenuation and unsharp masking have to be applied only once,
which saves almost half of the runtime. The computation of the Laplacian only
requires one convolution instead of four finite differences.
Table 4.1 shows the computation times for the results presented in this section
(file-I/O excluded; Intel® Xeon™ 3.06 GHz dual core).
Name Resolution σ Elapsed TimeAngel 200x200 4 0.3 secArmadillo 640x460 4 2.0 secHappy Buddha 970x900 5 7.5 sec
Table 4.1: Runtime overview for selected models
4.2 Discussion
All in all, the feature preservation of this Laplacian algorithm is acceptable but the
appearance of the model in the final bas-relief is not as good as the results obtained
by the gradient domain approach. For high compression ratios the bending itself
is not visible from an orthogonal vantage point, but if the compression is relatively
low, then the reflections on the surface will reveal this deformation.
This Laplacian domain approach is an extension of an algorithm which is
pretty novel itself, hence the current state is only preliminary. A different method
to overcome the boundary problem at the object’s silhouette is required in order
to produce evenly flat results. We are still searching for an appropriate solution
but we could not find a satisfying one until the deadline for this thesis.
The virtual results in both of our approaches look very promising, but there
will be two grave practical problems if these results should be ”brought to real
life” with the help of a CNC machine, a milling device, or a laser carver.
(1) The tools which are used e.g. by a milling device, have a certain spatial
extend so that very small details either cannot be produced or will be destroyed
again during the process.

42 CHAPTER 4. LAPLACIAN DOMAIN APPROACH
(2) The crucial point is the fact that our generated height fields are discrete.
A CNC machine needs to know the transition from one entry to the next. These
can be e.g. linear, parabolic, cubic or a circular arc of given radius. So, if our
depth compressed range images serve as input, one has to decide in advance which
transition should be applied where; or a spline curve has to be fitted through all
discrete points of a row for each column. But then, it cannot be guaranteed that
the effects and details which are visible in the synthetic results also arise on the
material in the outcome.
The authors of [28] have produced a limestone sculpture but due to the above
mentioned reasons, it exhibits only a small number of coarse features compared
to their virtual results.

Chapter 5
Discussion & Conclusion
5.1 Discussion
The approach presented in [28] is currently the most flexible one for the genera-
tion of bas-reliefs. This method offers a number of possible artistic effects and the
user is given a lot of freedom, e.g one can use an arbitrary number of frequency
bands and change their relative weights. But this freedom requires either an ex-
perienced artist or a trial and error adjustment for the parameters in case of an
untrained user.
The gradient domain approach presented in this thesis is restricted in the num-
ber of possible artistic effects so far. Nevertheless, it produces bas-reliefs which
can at least compete with the ones achieved by the algorithm presented in [28], it
is reasonable fast and much more user friendly.
The method presented in [14] is, in some sense, a subset of our current gra-
dient domain algorithm. It focuses only on high frequencies which leads to either
slightly noisy or exaggerated results. Depending on the model or the artists inten-
tion this method is absolutely sufficient. Its advantages are the simplicity and the
higher speed.
The Laplacian approach from Chapter 4 is still under development. All in
all, the results are not yet satisfying but promising and they require only short
computation times. The look of the outcomes of the gradient algorithm is still
more natural than the one of the bas-reliefs generated by the Laplacian method.
43

44 CHAPTER 5. DISCUSSION & CONCLUSION
The pioneering work of [7] is not applicable if high compression ratios are
needed because then the feature preservation is hardly better than the one of linear
rescaling. Nevertheless their method is simpler and faster than any other approach
in this area.
5.2 Conclusion
In this thesis we have described a method which assists a user with the gener-
ation of bas-reliefs from a given shape. Furthermore, we have shown how this
approach, which operates on the gradient, can be raised to the Laplacian domain.
The artist has the possibility to steer the relative attenuation between coarse and
fine details in order to control their presence in the outcome. For an orthogonal
vantage point we can achieve arbitrary compression ratios and preserve visually
important details at the same time.
Due to the fact that this problem is related to High-Dynamic-Range-
Compression we have adapted several ideas from tone mapping to our purpose.
Our algorithm is simple, fast, easy to implement and independent of the model’s
complexity. Possible applications are any kind of synthetic or real world shape
decoration like embossment, engraving, carving or sculpting.
This is a very young and interesting research field which currently receives
more attention. The results in this area look very promising but there is still a
number of possible extensions.
5.3 Future Work
So far, the three dimensional scenes which are used as examples, only consist
of one object. For a very complex or even panoramic scene with many objects,
z-buffering from one perspective camera or orthogonal ray-casting can leads to
distortion, bending and other undesired artifacts. For a sequence of two dimen-
sional images this problem is e.g. studied in [21] and [22]. That’s why the use of
multi-perspective techniques constitutes a direction for future research. We expect
a huge difference between the results obtained by a regular one camera capturing

5.3. FUTURE WORK 45
of a scene and the outcomes achieved with a multi-view approach. It also offers
the opportunity to make hidden objects visible by having a camera pointing be-
hind an occluding object. Multiple viewpoints have been applied in paintings for
a very long time e.g. by Pablo Picasso. In our case multi-perspective methods
would give more respect to human perception on the one hand and provide many
more possible artistic effects on the other hand.
The design of a hybrid approach which keeps and enhances gradient details as
well as properties of the Laplacian and combines both methods is another possible
extension. Therefore, we want to improve the work in the Laplacian domain by
applying a different silhouette treatment.
Using and developing other techniques to extract and treat the frequency
bands, e.g. by multi-resolution methods, would give the user even more control
on the outcome and offer further artistic effects as well.
In contrast to that, we also think of reducing the user intervention by devel-
oping a quality measure which takes into account the properties of the generated
bas-reliefs and those of the original height field. This could help to introduce adap-
tive parameters for the functions used inside of our algorithm and hence make the
process more automatic.

46 CHAPTER 5. DISCUSSION & CONCLUSION

Bibliography
[1] AIM@SHAPE. AIM@SHAPE shape repository. http://shapes.aim-at-shape.net/.
[2] Neil Alldrin, Satya Mallick, and David Kriegman. Resolving the generalizedbas-relief ambiguity by entropy minimization. In IEEE Conf. on ComputerVision and Pattern Recognition, June 2007.
[3] Peter N. Belhumeur, David J. Kriegman, and Alan L. Yuille. The bas-reliefambiguity. Int. J. Comput. Vision, 35(1):33–44, 1999.
[4] Dietrich Braess. Finite Elements: Theory, Fast Solvers, and Applications inSolid Mechanics. Cambridge University Press, 2002. second edition.
[5] Richard J. Campbell and Patrick J. Flynn. A www-accessible 3D imageand model database for computer vision research. In Empirical EvaluationMethods in Computer Vision, K.W. Bowyer and P.J. Phillips (eds.), pages148–154, 1998. http://sampl.ece.ohio-state.edu/data/3DDB/index.htm.
[6] Richard J. Campbell and Patrick J. Flynn. Experiments in transform-basedrange image compression. In ICPR ’02: Proceedings of the 16 th Interna-tional Conference on Pattern Recognition (ICPR’02) Volume 3, page 30875,2002.
[7] Paolo Cignoni, Claudio Montani, and Roberto Scopigno. Automatic gener-ation of bas- and high-reliefs. Journal of Graphics Tools, 2(3):15–28, 1997.
[8] Paolo Cignoni, Roberto Scopigno, and Marco Tarini. A simple normal en-hancement technique for interactive non-photorealistic renderings. Com-puter & Graphics, 29(1):125–133, 2005.
[9] Paul Debevec and Erik Reinhard. High-dynamic-range imaging:Theory and applications. SIGGRAPH 2006 Course #5, 2006.http://www.siggraph.org/s2006/main.php?f=conference&p=courses&s=5.
47

48 BIBLIOGRAPHY
[10] Fredo Durand and Julie Dorsey. Fast bilateral filtering for the display ofhigh-dynamic-range images. In ACM Transactions on Graphics (Proc. SIG-GRAPH 2002), pages 257–266, 2002.
[11] Raanan Fattal, Dani Lischinski, and Michael Werman. Gradient domainhigh dynamic range compression. In ACM Transactions on Graphics (Proc.SIGGRAPH 2002), pages 249–256, 2002.
[12] Sarah F. Frisken, Ronald N. Perry, Alyn P. Rockwood, and Thouis R. Jones.Adaptively sampled distance fields: a general representation of shape forcomputer graphics. In ACM Transactions on Graphics (Proc. SIGGRAPH2000), pages 249–254, 2000.
[13] Igor Guskov, Wim Sweldens, and Peter Schroder. Multiresolution signalprocessing for meshes. In SIGGRAPH ’99: Proceedings of the 26th annualconference on Computer graphics and interactive techniques, pages 325–334, 1999.
[14] Jens Kerber, Alexander Belyaev, and Hans-Peter Seidel. Feature PreservingDepth Compression of Range Images. In SCCG ’07: Proceedings of the23rd spring conference on Computer graphics, April 2007. Winner 2nd bestSCCG ’07 paper award. Post-conference proceedings are in print.
[15] Stanford Computer Graphics Laboratory. Stanford 3D scanning repository.http://graphics.stanford.edu/data/3Dscanrep/.
[16] Chang Ha Lee, Amitabh Varshney, and David W. Jacobs. Mesh saliency. InACM Transactions on Graphics (Proc. SIGGRAPH 2005), pages 659–666,2005.
[17] Thomas Luft, Carsten Colditz, and Oliver Deussen. Image enhancement byunsharp masking the depth buffer. In ACM Transactions on Graphics (Proc.SIGGRAPH 2006), pages 1206–1213, 2006.
[18] Rafał Mantiuk, Karol Myszkowski, and Hans-Peter Seidel. A perceptualframework for contrast processing of high dynamic range images. In APGV’05: Proceedings of the 2nd symposium on Appied perception in graphicsand visualization, pages 87–94, 2005.
[19] Alexander A. Pasko, Vladimir Savchenko, and Alexei Sourin. Syntheticcarving using implicit surface primitives. Computer-Aided Design, Elsevier,33(5):379–388, 2001.

BIBLIOGRAPHY 49
[20] Ronald N. Perry and Sarah F. Frisken. Kizamu: a system for sculpting digitalcharacters. In ACM Transactions on Graphics (Proc. SIGGRAPH 2001),pages 47–56, 2001.
[21] Augusto Roman, Gaurav Garg, and Marc Levoy. Interactive design of multi-perspective images for visualizing urban landscapes. In VIS ’04: Proceed-ings of the conference on Visualization ’04, pages 537–544, 2004.
[22] Augusto Roman and Hendrik P. A. Lensch. Automatic multiperspective im-ages. In Rendering Techniques 2006: Eurographics Symposium on Render-ing, pages 161–171, 2006.
[23] Wenhao Song, Alexander Belyaev, and Hans-Peter Seidel. Automatic gen-eration of bas-reliefs from 3D shapes. In SMI ’07: Proceedings of the IEEEInternational Conference on Shape Modeling and Applications 2007, pages211–214, June 2007.
[24] Alexei Sourin. Functionally based virtual computer art. In SI3D ’01: Pro-ceedings of the 2001 symposium on Interactive 3D graphics, pages 77–84,2001.
[25] Alexei Sourin. Functionally based virtual embossing. The Visual Computer,Springer, 17(4):258–271, 2001.
[26] Ping Tan, Satya P. Mallick, Long Quan, David Kriegman, and Todd Zickler.Isotropy, reciprocity and the generalized bas-relief ambiguity. In IEEE Conf.on Computer Vision and Pattern Recognition, June 2007.
[27] Jack Tumblin and Greg Turk. Lcis: a boundary hierarchy for detail-preserving contrast reduction. In ACM Transactions on Graphics (Proc.SIGGRAPH 1999), pages 83–90, 1999.
[28] Tim Weyrich, Jia Deng, Connelly Barnes, Szymon Rusinkiewicz, and AdamFinkelstein. Digital bas-relief from 3D scenes. To appear in ACM SIG-GRAPH, August 2007.
[29] Wikipedia. Wikipedia, the free encyclopedia, 2007. http://en.wikipedia.org.