diplomski rad robotski sistem irb 1600
DESCRIPTION
Diplomski rad Robotski sistem IRB 1600TRANSCRIPT

UNIVERZITET U SARAJEVU MAŠINSKI FAKULTET SARAJEVO
ABB Robotski sistem IRB1600
- diplomski rad -
Mirza Cogo
Sarajevo, juni, 2010
MAŠINSKI FAKULTET SARAJEVO Katedra za proizvodnu tehniku i kibernetiku Automatizacija i roboti Sarajevo, juni 2010
Diplomski zadatak Kandidat:_______________________________ Tema diplomskog zadatka:_________________
Predsjednik komisije Mentor Majda Čohodar

Sažetak
Ovaj diplomski rad pokriva opis i rad sa Abb-ovim robotskim sistemom IRB1600, kao i offline programiranje, tj. koncept kontrole robotskih sistema koji podrazumjeva rad sa robotom u virtualnom okruženju, gdje je moguće isplanirati i isprogramirati rad cijelog automatizovanog industrijskog procesa te nakon toga preći na rad sa realnom fizičkom robotskom stanicom, što pruža brojne prednosti u industrijskoj proizvodnji što je takođe predstavljeno u ovom radu.
U uvodnom dijelu rada dat je uvod u industrijsku robotiku. Opisan je ABB-ov robotski sistem IRB1600 i objašnjen rad sa istim korištenjem privjeska za učenje. U nastavku je obrađen softverski paket RobotStudio. Dalje je prikazano pravljenje simulacije automatizacije industrijske prese u virtualnom okruženju koristeći RobotStudio. Na kraju je pokazano korištenje RobotStudio-a za kontrolu realnog fizičkog robotskog sistema IRB1600, tj. offline programiranje.
Summary
This final exam for university degree covers the decription and work with ABB robotic system IRB1600 and offline programing, concept of control of robotic systems where work with a robot is done in a virtual enviroment, where it is posible to plan and program work of the whole automated industrial process, and then move on to the work with real physical robotic station, which offers many advanteges in industrial manufacturing which is also presented here.
Introductory part of this work provides introduction to industrial robotics. ABB robotic system IRB1600 is described, and the use of teach pedent for control of robotic system is explaind. Also, work with RobotStudio software is also described. The making of simulation for automatization of industrial press in virtual enviroment by using RobotStudio is shown. This work also provides a description of the use of RobotStudio for the control of real physical robotic sistem IRB1600, or off-line programing.
Sadržaj
1. Uvod 1 2. Robotski sistemi 3
2.1. Robotski manipulatori 4 2.2. Prihvatnice 9 2.3. Aktuatori 11 2.4. Senzori 12 2.5. Robotski kontroleri 13 2.6. Primjena robota 14
3. IRB1600 17 4. Robotsko upravljanje 19
4.1. Koordinatni sistemi 20 4.2. Privjesak za učenje 23
5. RobotStudio 35
5.1. Simulacija robotskog sistema za opsluživanje industrijske prese 42 5.2. Program 60
6. Zaključak 66 7. Literatura 67

Diplomski rad ABB Robotski sistem IRB 1600
1. Uvod
Čovjek je od svog nastanka nastojao život učiniti lakšim i to je i činio u onolikoj mjeri koliko je to stepen razvoja nauke i tehnike dopuštao. Sredinu prošlog stoljeća obilježila je era automatizacije kojom se rutinska komponeta čovjekovog rada nastojala zamijeniti mašinom. Razvoj elektronike i mikroprocesorskih sistema mijenjaju način na koji se automatizacija proizvodnje relaizira. Proizvodnja postaje fleksibilna zahvaljujući primjeni NC alatnih mašina. Razvoj teleoperatora kojim se nastojao zamijeniti čovjek pri rukovanju sa nuklearnim sirovinama, sa jedne strane, te razvoj NC alatnih mašina sa druge strane, doveli su do razvoja robotskih sistema.
Ideja o stvaranju mašina koje oponašaju samog čovjeka je oduvijek bila prisutna. Prvi put naziv robot je upotrebljen 1920, u predstavi Rossumovi univerzalni roboti (RUR), Karela Čapeka. Riječ „robot“ je izvedenica riječi „robota“ iz Češkog jezika, što znači jednostavno „rad“. Dalja popularizacija i korištenje ovog termina uslijedila je u brojnim naučnofantastičnim romanima i ranim holivudskim filmovima. Neophodno je spomenuti rad Isaka Aasimova, koji je u svom romanu „Runaround“ prvi put spomenuo 3 zakona robotike, koji govore o etici interakcije robota i ljudi. Iako dugo vremena ti zakoni nisu imali praktičnu primjenu, sa razvojem umjetne inteligencije i robota nove genereacije u budućnosti, to će se promijeniti.
Industrijski roboti su se prvi put pojavili 1954, patentom Georga Davola. Zajedno sa Josphom Engelbergerom Devol osniva prvu robotsku kompaniju, Unimation koja uvodi prvog industrijskog robota u upotrebu 1961, u postrojenju General Motorsa. Ovaj robot je služio za vađenje dijelova iz mašine za livenje. Većina Unimates robota je bila prodana sljedećih godina. Ovi roboti su služili za manipulaciju materijalom, i za zavarivanje automobilskih dijelova. Obje ove aplikacije su se pokazale uspješnim, što znači da su roboti radili pouzdano i osiguravali jednak nivo kvaliteta. Uskoro, mnoge druge firme su počele sa razvojem i proizvodnjom industrijskih robota. Potrebno je spomenuti i nastanak Stanfordske ruke, koja predstavlja prekretnicu u razvoju robotike. Ona je nastala kao istraživački prototip 1969 godine, u Stanfordskom laboratoriju za umjetnu inteligenciju (Stanford Artifical Intelligence Laboratory).
Sedamdesetih godina dolazi do ubrzanog razvoja digitalnih računara i mikroprocesora. 1973. godine, kompanija ASEA (sadašnji ABB) je predstavila prvog mikroprocesorski upravljanog, električki osnaženog industrijskog robota, IRB-6, koji je omogućio kontinualnu putanju kretanja, što je neophodno za zavarivanje. Tokom sedamdesetih godina dolazi do nagle ekspanzije robota u proizvodnju automobila, orijentisanih uglavnom na procese zavarivanja i manipulaciju radnim komadima.
Mašinski fakultet Sarajevo Mirza Cogo
1

Diplomski rad ABB Robotski sistem IRB 1600
1978 godine, Hirishi Makino sa univerziteta Yamanashi je izumio robotsku konfiguraciju SCARA (Selective Compliance Assembly Robot Arm). Ova konfiguracija se pokazala perfektna za sastavljanje sitnih dijelova.
Tokom 80. i 90. godina dolazi do razvoja novih tipova robotskih konfiguracija, između ostalih paralelne i kartezijeve strukture. Javlja se veća potreba za autonomijom robota. Pažnja je posvećena ljudskoj sigurnosti u opasnom okruženju, zatim terenskoj robotici (field robotics), te povećanju sposobnosti operatera (human augmentation), i na kraju razvoju servisne robotike, sve sa ciljem razvoja proizvoda sa velikim markentiškim potencijalom usmjerenim ka poboljšanju kvaliteta života.
U 2007. prijavljeno je više od milion industrijskih robota, od čega na automobilsku industriju otpada više od 60 %. Prosječna cijena robota je pala na otprilike jednu trećinu svoje ekvivalentne cijene iz 1990, što znači da automatizacija postaje sve isplativija. Takođe dolazi do sve većeg poboljšanja robotskih parametara kao što su brzina, nosivost i sl. Veliki razvoj elektronike, PC tehnologije i kompjuterskog softvera dovodi do toga da većina proizvođača koristi PC tehnologiju za programiranje, simulacije i slično. Pored toga, sistemi vizuelne identifikacije postaju integralni dio robotskih kontrolera.
U ovom diplomskom radu opisani su struktura, način rada i programiranja ABB-ovog robotskog sistema IRB1600. U drugom poglavlju generalno je analizirana struktura industrijskih robota, prikazane najčešće korištene robotske konfiguracije i područja primjene robota u industriji. U trećem poglavlju pažnja je fokusirana na strukturu robotskog sistema IRB1600. Način njegovog rada (koordinatni sistemi, korištenje privjeska za učenje) objašnjen je u četvrtom poglavlju, dok je offline programiranje primjenom programskog paketa RobotStudio predmetom petog poglavlja. Napravljena je simulacija opsluživanja industrijske prese, te napravljen jednostavan program za rad sa realnim sistemom IRB1600. Konačno, rad se završava zaključkom i preporukama za budući rad.
Mašinski fakultet Sarajevo Mirza Cogo
2

Diplomski rad ABB Robotski sistem IRB 1600
2. Robotski sistemi
Robotski sistem je reprogramabilni višefunkcionalni manipulator dizajniran da prenosi materijale, dijelove, alate i druge uređaje kroz varijabilne pokrete obavljajući planirani zadatak (RIA – Robotic Institute of America). To je složeni sistem koji se sastoji od:
− mehaničkog dijela – manipulatora,
− senzora,
− energetskog dijela i
− upravljačke jedinice (engl. controlera).
Percepcija je ostvarena putem senzora koji pružaju informacije o stanju robota (najčešće o poziciji i brzini) i njegovoj okolini.
U ovom dijelu su prezentirane najčešće strukture robotskih manipulatora i navedeni osnovni pojmovi vezani za njih (doseg, nosivost, brzina, ponovljivost, rezolucija, tačnost). Nakon toga pažnja je posvećena konstrukciji prihvatnice, načinu osnaživanja robotskih sistema, te senzorima i robotskim kontrolerima.
Slika 2.1. Robotski manipulator IRB120, ABB-ov najmanji robot
Mašinski fakultet Sarajevo Mirza Cogo
3

Diplomski rad ABB Robotski sistem IRB 1600
2.1. Robotski manipulatori
Svi industrijski roboti imaju dva fizički odvojiva dijela:
1. manipulator sa senzorima i motorima i
2. upravljačku jedinicu (kontroler).
Mehanički dio robotskog sistema – manipulator sastoji se od najčešće serijski povezanih krutih tijela, članaka koji tvore otvoreni kinematički lanac. Veza između članaka naziva se zglobom koji dopušta određena kretanja narednog u odnosu na prethodni članak. U robotici se najčešće koriste dva osnovna tipa zgloba, prizmatični (translatorni) i revolutni (rotacioni), slika 2.2.
a) b)
Slika 2.2 Osnovni tipovi zglobova: a) prizmatični, b) rotacioni
U otvorenim kinematičkim lancima ova dva osnovna tipa zgloba unose po jedan stepen slobode kretanja. Prizmatični, odnosno rotacioni zglob unose jedno relativno translatorno, odnosno rotaciono kretanje narednog u odnosu na prethodni članak.
Rani roboti su bili dizajnirani na taj način da mogu izvršiti širok spektar operacija, pod pretpostavkom da će tako naići na što širu primjenu. Međutim, pokazalo se da su na taj način žrtvovane performanse i povećana cijena. Robotske strukture su danas dizajnirane za specifični set zadataka koje robot treba obaviti. Robotski dizajn se fokusira na broj zglobova, fizičku veličinu, kapacitet, nosivost i zahtjeve kretanja prihvatnice.
2.1.1 Tipovi robotskih konfiguracija
Manipulator se sastoji od ruke koja osigurava mobilnost, na nju se postavlja šaka koja obezbjeđuje spretnost i na kraju se postavlja prihvatnica (eng.end-effector) kojom se ostvaruje inerakcija robota sa okolinom. Kombinacijom različitih tipova zglobova nastaju različite robotske strukture, od kojih su neke našle široku primjenu:
1. Kartezijeva konfiguracija. Roboti tipa kartezijevske konfiguracije (slika 2.3) realizirani su sa tri prizmatična zloba koji omogućavaju kretanje prihvatnice duž
Mašinski fakultet Sarajevo Mirza Cogo
4
Diplomski rad ABB Robotski sistem IRB 1600
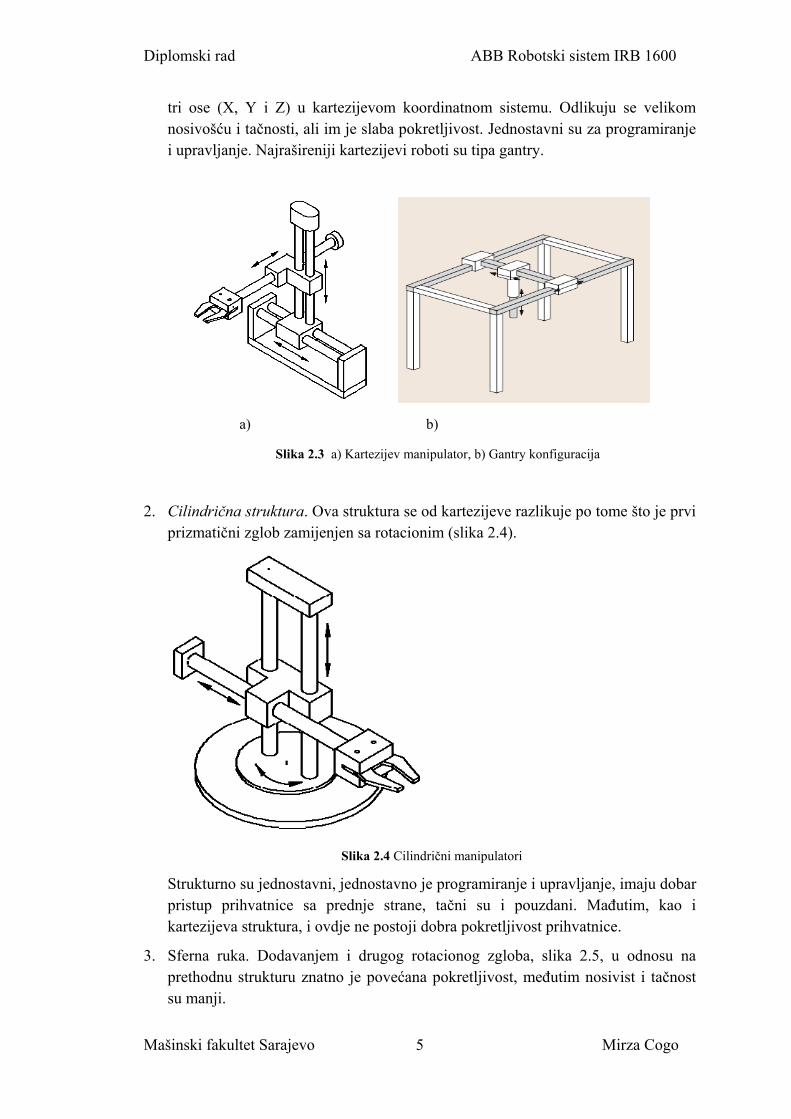
tri ose (X, Y i Z) u kartezijevom koordinatnom sistemu. Odlikuju se velikom nosivošću i tačnosti, ali im je slaba pokretljivost. Jednostavni su za programiranje i upravljanje. Najrašireniji kartezijevi roboti su tipa gantry.
a) b)
Slika 2.3 a) Kartezijev manipulator, b) Gantry konfiguracija
2. Cilindrična struktura. Ova struktura se od kartezijeve razlikuje po tome što je prvi prizmatični zglob zamijenjen sa rotacionim (slika 2.4).
Slika 2.4 Cilindrični manipulatori
Strukturno su jednostavni, jednostavno je programiranje i upravljanje, imaju dobar pristup prihvatnice sa prednje strane, tačni su i pouzdani. Mađutim, kao i kartezijeva struktura, i ovdje ne postoji dobra pokretljivost prihvatnice.
3. Sferna ruka. Dodavanjem i drugog rotacionog zgloba, slika 2.5, u odnosu na prethodnu strukturu znatno je povećana pokretljivost, međutim nosivist i tačnost su manji.
Mašinski fakultet Sarajevo Mirza Cogo
5

Diplomski rad ABB Robotski sistem IRB 1600
Slika 2.5 Sferna ruka
4. Antropomorfna stuktura. Ovo je najrasprostranjenija robotska stuktura i sastoji se od tri rotaciona zgloba koji su strukturi dali dobru pokretljivost u odnosu na prethodno pomenute strukture, ali su smanjene nosivost i tačnost. Međutim, dizajn ruke se stalno poboljšavao i na taj način unapređivala nosivost, brzina i doseg, dok se u isto vrijeme smanjivala masa i inercija ruke, a poboljšala čvrstoća i snaga. Ovaj dizajn zadovoljava skoro sve aplikacije u proizvodnji. Neki tipovi konfiguracija, kao IRB1600, mogu biti okrenuti i postavljeni naopako. Glavni nedostatak performansi vezanih ruku je to što druga osa mora da radi da digne i ručnu strukturu i radni teret.
Slika 2.6 Antropomorfna struktura
5. SCARA (Selectively Compliant Assembly Robot Arm), posjeduje dva paralelna obrta zgloba koji vrše kretanje u horizontalnoj ravni. Struktura ruke podnosi težinu, ali prva i druga osa ne vrše podizanje. Ovaj tip konfiguracije rijetko ima više od 4 ose. SCARA se koristi pri sastavljanju elektronskih dijelova i komponenti, kao i za sastavljanje malih mehaničkih uređaja. Ova robotska konfiguracija je optimizirana za brzinu i preciznost kretanja.
Mašinski fakultet Sarajevo Mirza Cogo
6

Diplomski rad ABB Robotski sistem IRB 1600
Slika 2.7 SCARA
2.1.2 Performanse robotskih manipulatora
Rani roboti su bili dizajnirani na takav način da mogu izvršiti širok spektar operacija, pod pretpostavkom da će tako naići na što širu primjenu. Međutim, pokazalo se da su na taj način žrtvovane performanse i povećana cijena. Robotske strukture su danas dizajnirane za specifični set zadataka koje robot treba obaviti. Robotski dizajn se fokusira na broj zglobova, fizičku veličinu, kapacitet, nosivost i zahtjeve kretanja prihvatnice.
Osnovni pojmovi koji definiraju peformanse robotskog manipulatora su:
- Doseg reprezentuje rastojanje od središta baze do kraja njegove prihvatnice. Definira se mjerenjem radnog prostora, odnosno geometrijskog mjesta tačaka u koji može dosegnuti prihvatnica robota. Doseg zavisi od tipa zglobova, opsega kretanja zglobova, te dužine članaka robota. U robotskim tehničkim specifikacijama dat je obično horizontalni doseg, mjeren radijalno od centra rotacije bazne ose do najdalje tačke dosega u horizontalnoj ravni.
Mašinski fakultet Sarajevo Mirza Cogo
7

Diplomski rad ABB Robotski sistem IRB 1600
- Nosivost je jedna od primarnih osobina robota. Blisko je povezana sa ubrzanjem i brzinom. Kod specificiranja nosivosti mora se uzeti u obzir gravitacija i inercijalno opterećenje prihvatnice.
- Brzina robota. Maksimalna brzina zglobova, linearna ili ugaona, nije neovisna vrijednost. Kod dužih kretanja često je limitirana od strane motora.
- Ponovljivost. Ova osobina predstavlja sposobnost manipulatora ili sistema da ponovi isto kretanje ili prihvatnicu postavi u istu tačku pri istim ulaznim signalima. Ponovljivost je naročito važna kod ponovljivih zadataka kao što je sastavljanje ili utovar. Uobičajene vrijednosti ponovljivosti se kreću od 1-2 mm za veće robote za zavarivanje, do 0.005 mm za precizne manipulatore kod proizvodnje mikroprocesora.
- Rezolucija predstavlja najmanju kretnju koju može proizvesti manipulator. Rezolucija u zglobu zavisi od rezolucije enkodera upotrijebljenog za mjerenje linearnih ili ugaonih zaokreta u zglobu. Rezolucija je važna kod senzorski kontrolisane kretnje robota i kod finog pozicioniranja.
- Tačnost predstavlja sposobnost robota da pozicionira svoju prihvatnicu na programiranu lokaciju u prostoru. Robotska tačnost je naročito važna kod zadataka koji nisu repetativnog tipa. Tipične tačnosti za industrijske manipulatore se kreću od ±10 mm do ±0.01 mm.
Mašinski fakultet Sarajevo Mirza Cogo
8

Diplomski rad ABB Robotski sistem IRB 1600
2.2. Prihvatnice
Prihvatnice su uređaji preko kojih robot vrši interakciju sa okolinom, hvata i manipulira djelovima, vrši inspekciju površina, i radi na istim. Kako roboti postaju sve sofisticiraniji i počinju da rade na sve zahtjevnijim aplikacijama, dizajn prihvatnica postaje sve važniji. Mogu biti u obliku hvataljki, alata ili senzora ovisno o funkciji koju robot obavlja. Robotske hvataljke danas vrlo su raznolike konstrukcije - od jednostavnih hvatača sa dva prsta i vakumskih hvataljki, do složenih ruku sa više prstiju (slike 2.8, 2.9 i 2.10).
Sve hvataljke možemo podijeliti u dvije skupine: aktivne i pasivne.
Pasivne hvataljke. Većina hvataljki koje se danas koriste su pasivne. One simuliraju ljudski zahvat držanja teških objekata ili alata, bez manipulisanja preko prstiju. Pasivne hvataljke mogu biti opremljene senzorima čije se informacije koriste za upravljanje radom robotske ruke. U pasivne hvataljke spadaju vakumske, elektromagnetne, te hvataljke sa bernulijevim efektom. Vakumski hvatači, bilo jednostruki ili u kombinaciji, su možda najviše korištene prihvatnice u industriji danas. Oni se lako prilagođavaju širokom opsegu dijelova, od mikroprocesorskih čipova i drugih malih dijelova koji zahtjevaju tačno postavljanje do velikih dijelova kao što su automobilski vjetrobrani i dijelovi aviona.
Slika 2.8 Vakumska hvataljka
Aktivne hvataljke. U aktivne hvataljke ubrajamo servo gripere i pokretljive ruke sa više prstiju. Podjela ovdje zavisi od broja prstiju i broja zglobova ili stepena slobode po prstu. Servo-upravljane hvataljke su dobre kod zadataka koji zahtjevaju fine kretnje. U poređenju sa robotskom rukom, prsti su mali i lagani, što znači da se mogu pomjerati brzo i precizno. Ukupni opseg kretanja je mali, što
Mašinski fakultet Sarajevo Mirza Cogo
9
Diplomski rad ABB Robotski sistem IRB 1600
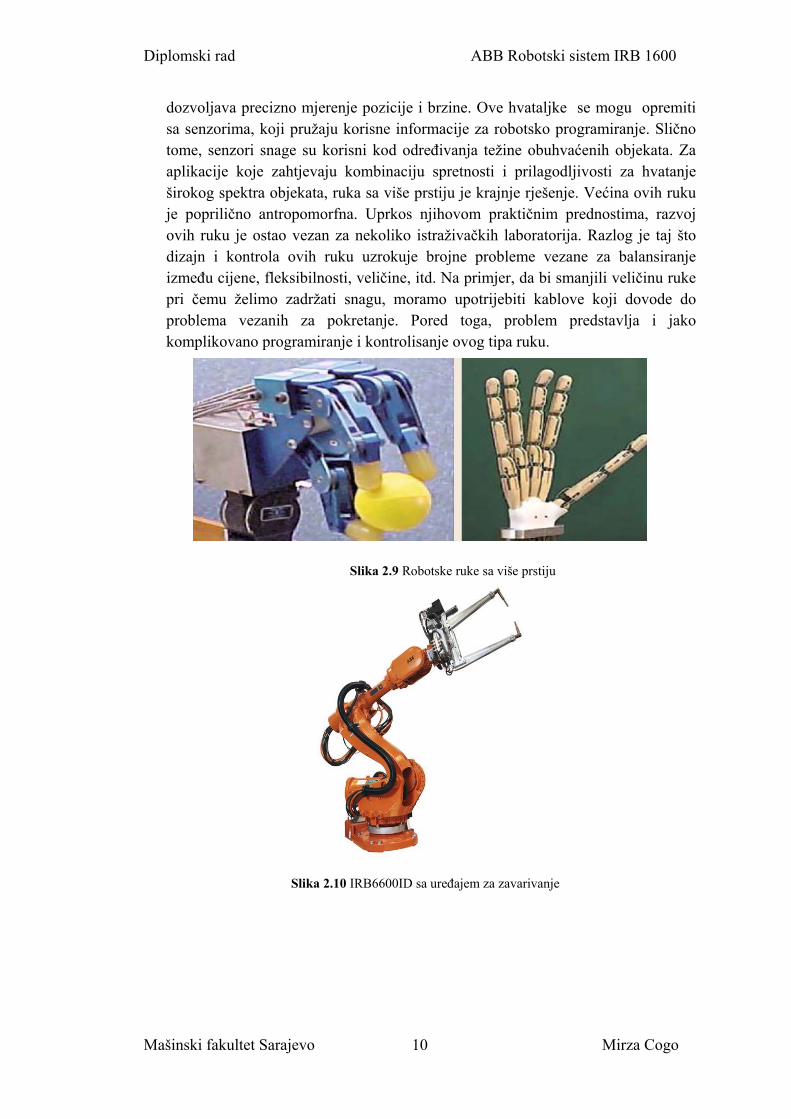
dozvoljava precizno mjerenje pozicije i brzine. Ove hvataljke se mogu opremiti sa senzorima, koji pružaju korisne informacije za robotsko programiranje. Slično tome, senzori snage su korisni kod određivanja težine obuhvaćenih objekata. Za aplikacije koje zahtjevaju kombinaciju spretnosti i prilagodljivosti za hvatanje širokog spektra objekata, ruka sa više prstiju je krajnje rješenje. Većina ovih ruku je poprilično antropomorfna. Uprkos njihovom praktičnim prednostima, razvoj ovih ruku je ostao vezan za nekoliko istraživačkih laboratorija. Razlog je taj što dizajn i kontrola ovih ruku uzrokuje brojne probleme vezane za balansiranje između cijene, fleksibilnosti, veličine, itd. Na primjer, da bi smanjili veličinu ruke pri čemu želimo zadržati snagu, moramo upotrijebiti kablove koji dovode do problema vezanih za pokretanje. Pored toga, problem predstavlja i jako komplikovano programiranje i kontrolisanje ovog tipa ruku.
Slika 2.9 Robotske ruke sa više prstiju
Slika 2.10 IRB6600ID sa uređajem za zavarivanje
Mašinski fakultet Sarajevo Mirza Cogo
10

Diplomski rad ABB Robotski sistem IRB 1600
2.3. Aktuatori
Aktuatori omogućuju osnaživanje zglobova robota kako bi se obavio planirani zadatak. Većina robotskih aktuatora su komercijalno dostupne komponente, koje su prilagođene ili modificirane, po potrebi za specifičnu robotsku aplikaciju. Tri vrste obično korištenih aktuatora su elektromotori, hidraulični i pneumatski motori.
- Elektromotori. Ovo su najčešće korišteni tipovi. Dijele se na koračne motore, istosmjerni motori sa permanentnim magnetom, te asinhrone.
- Hidraulični aktuatori, korišteni kao izvori snage za najranije industrijske robote, nude veoma velike snage i dobre odnose snage i težine. Kod hidrauličnog sistema snaga je pružena mehanički preko pumpe visokog pritiska, koja je pokretana od strane električnog ili sus motora. Kontrola aktuatora je preko solenoidnog ventila ili servo ventila, koji se pokreću ručno. Nedostatak ovih aktuatora je što su nezgrapni, zatim pojava curenja i cijena održavanja što ograničava upotrebu hidraulično pogonjenih robota.
- Pneumatske aktuatore obično susrećemo kod jednostavnih manipulatora. Oni pružaju nekontrolisano kretanje između mehaničkih graničnika. Ovi aktuatori su dobri kod kretanja od tačke do tačke. Jednostavni su za korištenje i imaju malu cijenu. Prekomjerna upotreba robota sa pneumatskim aktuatorima zahtijeva kupovinu i instalaciju skupih izvora komprimiranog zraka. Pneumatski aktuatori imaju malu energetsku efikasnost. Koriste se gdje okolina sprečeva upotrebu električnih aktuatora.
Mašinski fakultet Sarajevo Mirza Cogo
11

Diplomski rad ABB Robotski sistem IRB 1600
2.4. Senzori
Zadatak senzora je da pruže informaciju o stanju okoline i stanju robotskog sistema. Senzori omogućuju proces transformacije jedne fizičke veličine u drugu fizičku veličinu koja se može koristiti za dalju obradu. Upravljanje robotskih sistema bi bilo relativno jednostavna kada bi sve informacije bile unaprijed dostupne i kada bi aktuatori svoje komande mogli izvršavati perfektno tačno. Međutim, kako ovo nije slučaj, vrlo često su potrebne ne samo informacije o kretanjima u zglobovima (vektor unutrašnjih koordinata), već i informacije o stanju okoline. Drugim riječima, senzori su neophodni i sastavni dio robotskog sistema. Senzore bi mogli podijeliti na dvije skupine, one koji prate samog robota i one koji prate okolinu. Većina robotskih sistema su dizajnirani tako da imaju mogućnost procjene svog stanja, dok je analiziranje okoline mnogo kompleksniji zadatak. Senzore koji prate unutrašnje stanje robota prate poziciju zglobova, temperaturu, struje motora, sile na prihvatnici i sl. Senzori koji prate vanjsko stanje pružaju informaciju o okolini kao npr. udaljenost od objekta, sile s kojima se osvaruje inerakcija sa okolinom, itd.
Mašinski fakultet Sarajevo Mirza Cogo
12

Diplomski rad ABB Robotski sistem IRB 1600
2.5. Robotski kontroleri
Robotski kontroler predstavlja mozak koji upravlja radom robotskog sistema. Jedan od zadataka kontrolera je da omogući integraciju robota u automatizirani sistem. Svaki kontroler ima svoj operativni sistem i programski jezik. Pored kontrole kretanja, robotski kontroler najčešće trebaju biti u mogućnosti da koordiniraju kretnjama manipulatora sa procesnim senzorima, čitajući signala sa senzora i izvršavajući logičke operacije koristeći taj signal. Primjer je proces lučnog zavarivanja, gdje se podaci dobiveni od senzora koriste da se koriguje pozicija alata, odnosno trajektorija koju prihvatnica robota (uređaj za zavarivanje) slijedi kako bi se obavilo zavarivanje. Ovo zahtjeva konstantnu koordinaciju između signala sa senzora i funkcija generisanja robotskog kretanja. Pored toga još jedna od funkcija kontrolera je integracija operatera prilikom podešavanja, programiranja i održavanja robotskih sistema. Integracija je ostvarena preko ulazno-izlaznih naprava, npr. uređaja tipa privjeska za učenje.
Mašinski fakultet Sarajevo Mirza Cogo
13

Diplomski rad ABB Robotski sistem IRB 1600
2.6. Primjena robota
Danas se industrijski roboti koriste najčešće pri obavljanju sljedećih poslova:
− Elektrootporno tačkasto zavarivanje. Robotsko tačkasto zavarivanje je najčešća robotska aplikacija u automobilskoj industriji. Pojednostavljeno govoreći elektrootporno zavarivanje se ostvaruje pritiskivanjem dva metalna dijela jedan uz drugi, puštanjem struje određene jačine kroz spojno mjesto, prilikom čega se stvara velika toplota koja topi metal ostavrujući tačkasti spoj. Sve je ovo praćeno velikom bukom i iskrama. Od robotskih sistema pri tačkastom zavarivanju zahtijeva se tačno pozicioniranje pištolja za zavarivanje, pokretljivost, nosivost i odgovarajuća brzina. Za obavljanje ovih poslova moguće je koristiti robotske sisteme kojima je svojstvena faza učenja. Njom se postiže tačna pozicija zavara, međutim u posljednje vrijeme off-line programiranje robotskih sistema dobija na značaju i može se koristiti.
− Elektrolučno zavarivanje. Elektrolučno zavarivanje je proces spajanja metala korištenjem toplote generisane električnim lukom koji se stvara između elektrode i metalnih dijelova koji se spajaju. Zavareni spoj je zaštićen zaštitnim gasom. Najčešća metoda je MIG tj. zavarivanje pod inertnim zašititnim gasom, gdje se elektroda dostavlja kontinualno. Pozicija i orijentacija gorionika u odnosu na zavareni spoj je vrlo važan kontrolni parametar. Većina robota za obavljanje ovog tipa zavarivanja radi po fiksnom ciklusu, tj. izvršavaju programiranu sekvencu. Trajektorija koju obavlja uređaj za zavarivanje postavljen na vrh robotskog maniuplatora može biti generirana tokom faze učenja, pohranjena i zatim ponavljana tokom izvođenja procesa zavarivanja. Najčešće proces zavarivanja je praćen određenom montažom, rezanjem dijelova, zatim termalnom ekspanzijom dijelova itd. što dodatno komplicira ovaj proces. U novije vrijeme dolazi do velike integracije senzora u ovaj proces. Od robota za elektrolučno zavarivanje se zahtjeva visoka tačnost, preciznost, pokretljivost i doseg. Najčešće su upotrijebljeni robotski manipulatori sa 6 stepeni slobode kretanja, a vrlo često u robotski sistem za zavarivanje inetgriraju i dodatni pozicioneri koji unose još jedan ili dva stepena slobode kretanja. Pored toga njihov kontroler mora biti u mogućnosti da prihvati podatke od senzora i manipuliše s njima.
Mašinski fakultet Sarajevo Mirza Cogo
14

Diplomski rad ABB Robotski sistem IRB 1600
Slika 2.11 Postrojenje za tačkasto zavarivnje
− Paletiziranje, pakovanje. Mnogi proizvodi se pakuju u kutije i redaju na standardne palete prilikom prevoza. Roboti se često koriste prilikom paletiziranja kutija. Najpovoljniji roboti za ovu upotrebu su roboti sa cilindričnim kordinatama. Ukoliko treba pokriti veće površine, koristi se gantri robot. Najzahtjevnija komponenta kod paletiziranja je alat. Najčešći je to vakumski griper. Programiranje paletiziranja nije naročito komplikovano, programi se lako mjenjaju i prilagode promjenama u dimenzijama kutije. Pakirnje je proces sličan paletiziranju.
− Opsluživanje mašina. Mašine za kovanje, industrijske prese, mašine za obradu rezanjem su sada uobičajeno opsluživane od strane robota. Rad na ovim mašinama su vršili ljudi, sada se smatra da su ti poslovi previše monotoni i opasni da bi ih još uvijek obavljao čovjek. Pored humane strane, još jedna prednost automatizacije ove vrste mašina je poboljšan kvalitet proizvoda što je rezultat konzistentnog ciklusa mašine. Robot eliminira nedosljednost čovjeka, te omogućava da ciklus može biti tačno ponavljan, što je naročito bitno kod procesa koji su osjetljivi na termalno stanje mašine, kao presovanje, kovanje i sl. Kod nekonzistentnog ciklusa dolazi do značajnih varijacija koje rezultiraju greškama geometrije.
− Bojenje. Bojenje je jedna od glavnih aplikacija u automobilskoj industriji. Materijal za bojenje je često otrovan, kancerogen, i zapaljiv. Kada operacije bojenja vrše ljudi, moraju nositi zaštitnu opremu i maske za disanje. Većina robota koji služe za bojenje su obično specijalno dizajnirani za tu primjenu. Najčešće imaju veliki doseg, malu nosivosti, i ponovljivost je obično veća nego kod svih drugih tipova robota. Ovi roboti su obično artikulisane ruke sa 6 stepeni slobode kretanja, opremljeni sa pištoljem za bojenje. Prije pojave modernih aktuatora svi
Mašinski fakultet Sarajevo Mirza Cogo
15

Diplomski rad ABB Robotski sistem IRB 1600
roboti za bojenje su bili hidraulični, zbog rizika pojave iskre usljed upotrebe el. motora. Za bojenje je tipično programiranje putem učenja (gdje čovjek vodi manipulator ručno i pohranjuje put u robotsku memoriju). Off-line programiranje postaje sve popularnije za procese bojenja.
Slika 2.12 Roboti za bojenje
− Pored nabrojanih, industrijski roboti se primjenjuju i pri bušenju, inspekciji, rezanju (razne metode, laser, plazma, vodeno rezanje, itd.), zatim završnoj obradi, sortiranju proizvoda, potapanju u fluid, pri sastavljanju dijelova u robotskoj industriji, i mnogim drugim aplikacijama.
Mašinski fakultet Sarajevo Mirza Cogo
16
Diplomski rad ABB Robotski sistem IRB 1600
3. IRB1600
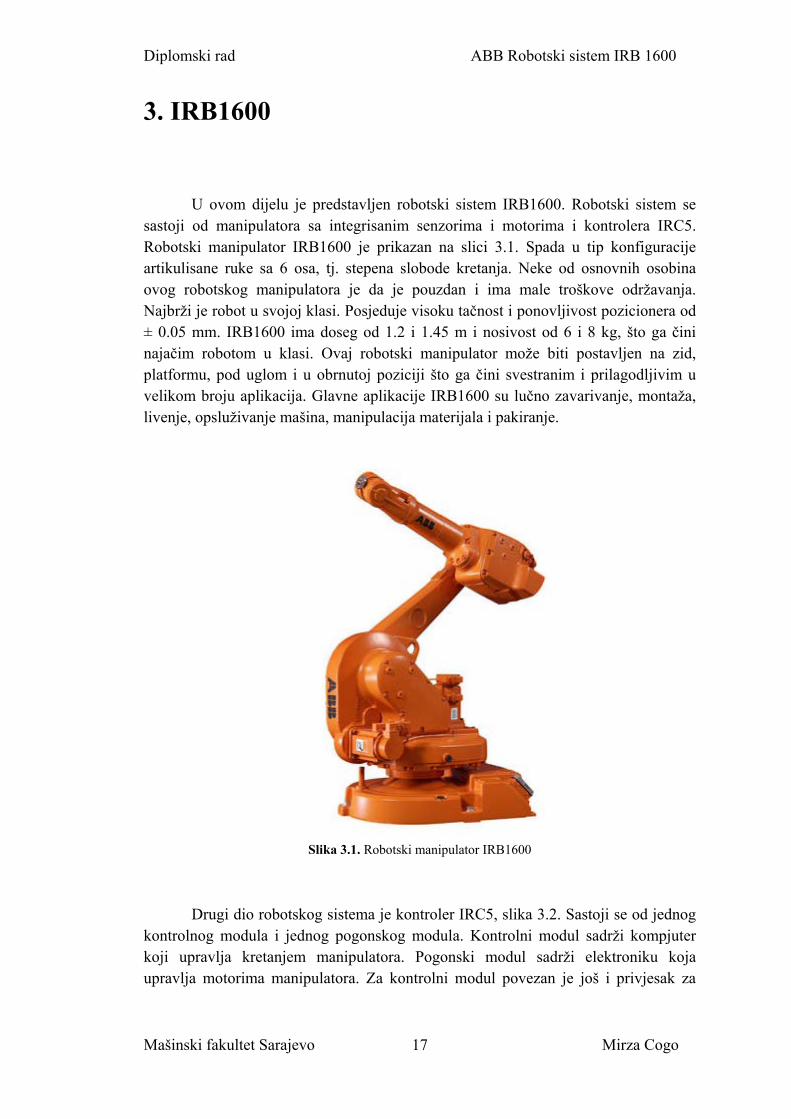
U ovom dijelu je predstavljen robotski sistem IRB1600. Robotski sistem se sastoji od manipulatora sa integrisanim senzorima i motorima i kontrolera IRC5. Robotski manipulator IRB1600 je prikazan na slici 3.1. Spada u tip konfiguracije artikulisane ruke sa 6 osa, tj. stepena slobode kretanja. Neke od osnovnih osobina ovog robotskog manipulatora je da je pouzdan i ima male troškove održavanja. Najbrži je robot u svojoj klasi. Posjeduje visoku tačnost i ponovljivost pozicionera od ± 0.05 mm. IRB1600 ima doseg od 1.2 i 1.45 m i nosivost od 6 i 8 kg, što ga čini najačim robotom u klasi. Ovaj robotski manipulator može biti postavljen na zid, platformu, pod uglom i u obrnutoj poziciji što ga čini svestranim i prilagodljivim u velikom broju aplikacija. Glavne aplikacije IRB1600 su lučno zavarivanje, montaža, livenje, opsluživanje mašina, manipulacija materijala i pakiranje.
Slika 3.1. Robotski manipulator IRB1600
Drugi dio robotskog sistema je kontroler IRC5, slika 3.2. Sastoji se od jednog kontrolnog modula i jednog pogonskog modula. Kontrolni modul sadrži kompjuter koji upravlja kretanjem manipulatora. Pogonski modul sadrži elektroniku koja upravlja motorima manipulatora. Za kontrolni modul povezan je još i privjesak za
Mašinski fakultet Sarajevo Mirza Cogo
17

Diplomski rad ABB Robotski sistem IRB 1600
učenje, koji služi za programiranje kretanja robota. Programiranje na ovaj način se naziva “online programiranje”. Rad sa privjeskom za učenje je opisan u poglavlju 4.
Slika 3.2. Kontrolni kabinet IRC5
Mašinski fakultet Sarajevo Mirza Cogo
18

Diplomski rad ABB Robotski sistem IRB 1600
4. Robotsko upravljanje
Prvi industrijski roboti bili su jednostavne mašine, najčešće kontrolisane kombinacijom servo motora, mehaničkih graničnika, te prekidača i logičkih kontrolera. Programirali su se tako što je operater koristio privjesak za učenje da pomjera prihvatnicu robota kroz željenu trajektoriju, to bi se snimilo i poslije puštalo po potrebi. Prvi programski jezik je razvijen na MIT-u ranih 1960-tih godina. Tokom osamdesetih i devedesetih godina dolazi do razvoja računarskog hardvera i softvera i uporedo s tim nastaju novi programski jezici. Razvijen je način programiranja preko point-to-point metode. Tu operater vodi prihvatnicu robota kroz željenu sekvencu tačaka. Upravljačka jedinica pri tome snima kretanje u zglobovima. To je faza učenja kada se u memoriji upravljačke jedinice robota pohranjuju tačke na trajektoriji. Po završenoj fazi učenja robot može reproducirati naučeno kretanje željeni broj puta. Faze učenja odnosno definisanje trajektorije moće biti realizirano i pomoću privjeska za učenje. Pored toga, takođe dolazi do razvoja programskih jezika sličnih programima na NC mašinama. Moderni programski jezici koriste PC, te pored navedenih načina dolazi do razvoja offline programiranja i simulacija, koje pružaju podršku za razvijanje 3D radnog okruženja.
U nastavku su objašnjeni osnovni pojmovi vezani za programiranje robotskog sistema IRB1600. Robotski sistem IRB1600 se kontrolira preko RobotWare sistema. RobotWare sistemi su kreirani u RobotStudio-u i predstavljaju set softverskih fajlova koji se učitavaju na kontroler. Mogu se pohraniti na PC i robotski kontroler. Interakcija sa njima se vrši preko RobotStudia, ili preko privjeska za učenje. Razlikujemo dva načina programiranja:
- online programiranje,
- offline programiranje.
Programiranje preko privjeska za učenje koji je povezan sa kontrolerom se naziva “Online programiranje”. Rad sa privjeskom je detaljnije opisan u poglavlju 4.2.
Pod “Offline” programiranjem se podrazumjeva programiranje preko PC-a, koji nije povezan sa robotskim kontrolerom i na taj način moguće je razviti novi program, testirati ga bez zaustavljanja robota pri obavljanju preostalih poslova. Prije nego bi se pristupilo offline programiranju potrebno je snimiti realnu robotsku konfiguraciju, te za dalji rad, razmjenu programa, testiranje i simulaciju obavljati na virtualnom sistemu. U nastavku su objašnjeni kordinatni sistemi robotskog kontrolera, nakon toga je objašnjen način rada sa privjeskom za učenje tj. “Online programiranje”.
Mašinski fakultet Sarajevo Mirza Cogo
19

Diplomski rad ABB Robotski sistem IRB 1600
4.1. Koordinatni sistemi
Robot IRB1600 spada u grupu robotskih sistema čije je programiranje orijentirano programiranju kretanja. Smatra se da će robot obavljajući potrebne kretnje, obaviti i za to planirani zadatak. Trajektorija koju treba da slijedi prihvatnica definira se referentnim tačkama. Što je trajektorija definirana sa većim brojem tačaka, to je preciznije kretanje prihvatnice. Položaj robota je definisan u odnosu na koordinatne sisteme (K.S.). Položaj prihvatnice može biti predstavljen u različitim koordinatnim sistemima. U nastavku će se objasniti koncept koordinatnih sistema koji se koriste kod programiranja.
Koordinatni sistemi su poredani po hijerarhiji:
- K.S. svijeta (World cordinate system)- W,
- K.S. kontrolera (Contoler cordinate system)- C,
- Bazni K.S. (Base cordinate system)- B,
- K.S. centralne tačke alata (Tool Central Point)- TCP,
- K.S. radnog objekta (Workobject cordinate system)- Wob
- korisnički K.S. (User cordinate system)- U
Koordinatni sistemi su predstavljeni na slikama 4.1 i 4.2.
TCP
Kordinate alata
B
Slika 4.1 Koordinatni sistemi
Mašinski fakultet Sarajevo Mirza Cogo
20

Diplomski rad ABB Robotski sistem IRB 1600
W,C,B Wob
U
Slika 4.2 Koordinatni sistemi
Prilikom programiranja biramo K.S. u odnosu na koji želimo definisati položaj neke referentne tačke. Baza K.S. koji je niže u hijerarhiji je definisana položajem u K.S.-u višeg reda. Za primjer će se uzeti položaj K.S. radnog objekta (označenog kao Wob na slici 4.2.) u odnosu na bazni K.S. (B). Ukoliko radimo u Wob, koordinate ishodišta K.S. radnog objekta su (0,0,0) po x, y i z osi. Ukoliko iste koordinate posmatramo u sistemu B, koordinate će imati vrijednost (x1, y1, z1). Te iste koordinate će biti definisane u K.S svijeta (označenog sa W) kao (x2, y2, z2). U nastavku su pojedinačno objašnjeni koordinatni sistemi od najstarijeg prema najmlađem.
-Koordinatni sistem svijeta (W) predstavlja najstariji K.S. u hijerarhiji i svi ostali K.S. su orijentisani u odnosu na njega. On predstavlja čitavu robotsku stanicu.
-K.S. kontrolera (C) je najstariji K.S. za jedan kontroler, te za robotske stanice sa samo jednim kontrolerom on je isto kao i K.S. svijeta.
-Bazni K.S. (B) je vezan za bazu robota. Ovih koordinatnih sistema ima koliko ima robota u stanici.
-K.S. centralne tačke alata tj. Tool Central Point (TCP) predstavlja centralnu tačku alata. Za jednog robota može biti dato nekoliko TCP-ova. Ukoliko nije naglašeno drugačije svi roboti imaju jedan unaprijed definisan TCP, nazvan tool0, koji se nalazi na mjestu montiranja alata na robota. Prilikom izvršenja programa, robot pomjera TCP po definisanoj trajektoriji.
-Koordinatni sistem radnog objekta (Wob) se sastoji iz dva koordinatna sistema: korisničkog okvira i objektnog okvira. Objektni okvir je niži u hijerarhiji. Prilikom programiranja robota, sve tačke položaja robota su date u odnosu na objektni okvir. Ukoliko nije drugačije naglašeno, sve tačke će biti date u odnosu na Wobj0, čije se kordinate poklapaju sa baznim K.S.
Mašinski fakultet Sarajevo Mirza Cogo
21

Diplomski rad ABB Robotski sistem IRB 1600
-Korisnički koordinatni sistemi tj. User Cordinate Systems (U) postavlja korisnik. On se obično postavlja na ključne dijelove procesa kojeg obavlja robotska stanica. Moguće je postaviti više U koordinatnih sistema. Koristi se radi pojednostavljenja prilikom programiranja.
Mašinski fakultet Sarajevo Mirza Cogo
22
Diplomski rad ABB Robotski sistem IRB 1600
4.2. Privjesak za učenje
Slika 4.3. Privjesak za učenje robotskog sistema IRB1600
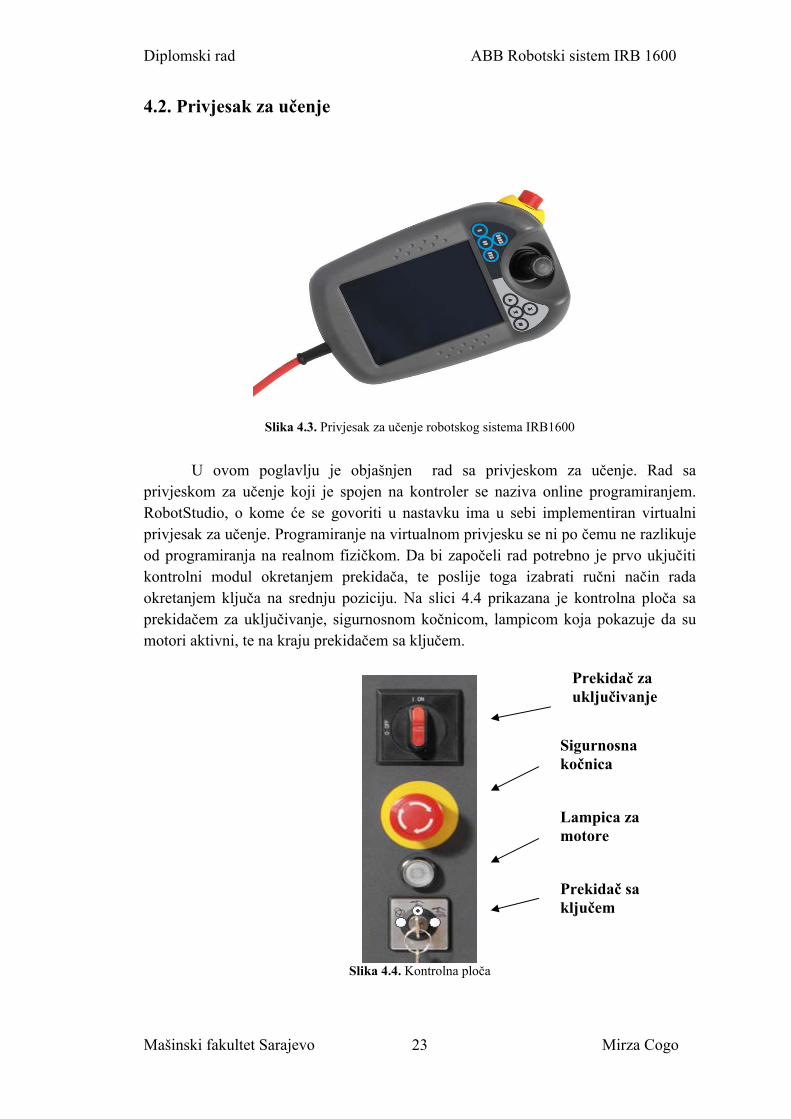
U ovom poglavlju je objašnjen rad sa privjeskom za učenje. Rad sa privjeskom za učenje koji je spojen na kontroler se naziva online programiranjem. RobotStudio, o kome će se govoriti u nastavku ima u sebi implementiran virtualni privjesak za učenje. Programiranje na virtualnom privjesku se ni po čemu ne razlikuje od programiranja na realnom fizičkom. Da bi započeli rad potrebno je prvo ukjučiti kontrolni modul okretanjem prekidača, te poslije toga izabrati ručni način rada okretanjem ključa na srednju poziciju. Na slici 4.4 prikazana je kontrolna ploča sa prekidačem za uključivanje, sigurnosnom kočnicom, lampicom koja pokazuje da su motori aktivni, te na kraju prekidačem sa ključem.
Prekidač za uključivanje
Sigurnosna kočnica
Lampica za motore
Prekidač sa ključem
Slika 4.4. Kontrolna ploča
Mašinski fakultet Sarajevo Mirza Cogo
23
Diplomski rad ABB Robotski sistem IRB 1600
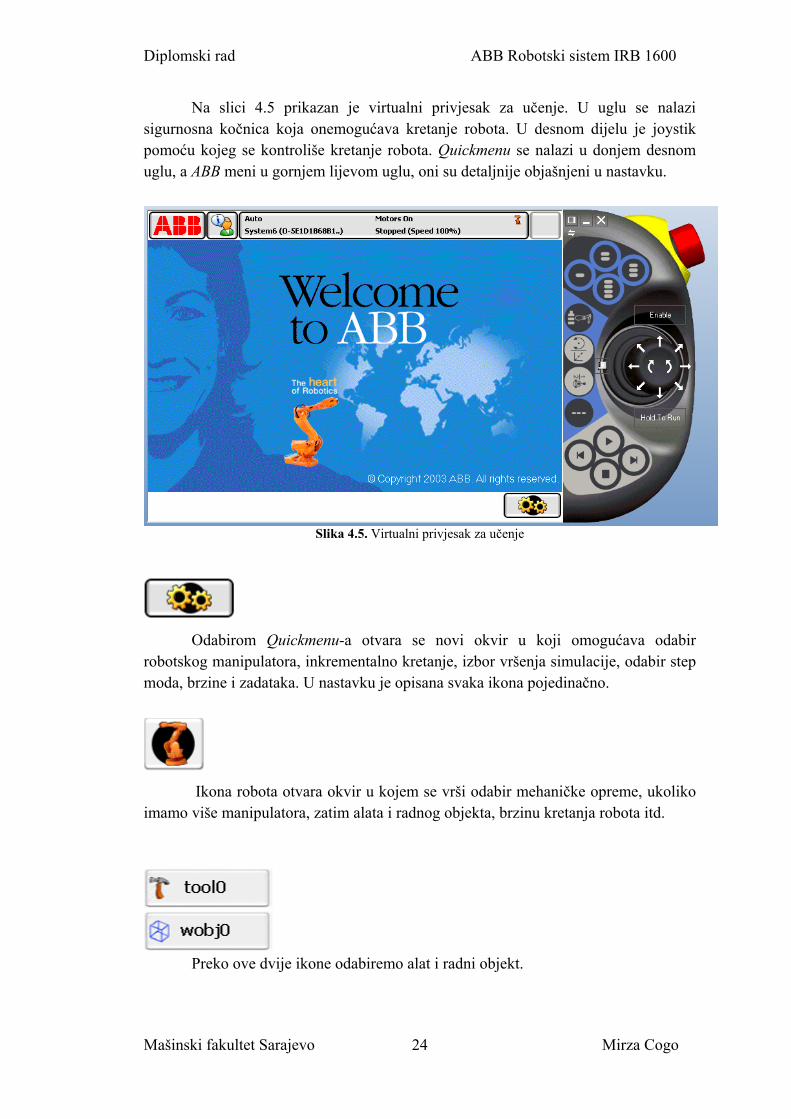
Na slici 4.5 prikazan je virtualni privjesak za učenje. U uglu se nalazi sigurnosna kočnica koja onemogućava kretanje robota. U desnom dijelu je joystik pomoću kojeg se kontroliše kretanje robota. Quickmenu se nalazi u donjem desnom uglu, a ABB meni u gornjem lijevom uglu, oni su detaljnije objašnjeni u nastavku.
Slika 4.5. Virtualni privjesak za učenje
Odabirom Quickmenu-a otvara se novi okvir u koji omogućava odabir
robotskog manipulatora, inkrementalno kretanje, izbor vršenja simulacije, odabir step moda, brzine i zadataka. U nastavku je opisana svaka ikona pojedinačno.
Ikona robota otvara okvir u kojem se vrši odabir mehaničke opreme, ukoliko
imamo više manipulatora, zatim alata i radnog objekta, brzinu kretanja robota itd.
Preko ove dvije ikone odabiremo alat i radni objekt.
Mašinski fakultet Sarajevo Mirza Cogo
24

Diplomski rad ABB Robotski sistem IRB 1600
Ovdje namještamo brzinu kretanja robota i imamo mogućnost uključivanja i
isključivanja inkrementalnog kretanja.
Preko ove trake odabiremo kordinatni sistem, KS svijeta, bazni, KS alata, i KS
radnog objekta.
Preko ove trake odabiremo kretanje alata. Ponuđene su sljedeće opcije:
kretanje osa od 1-3, kretanje osa 4-6, linearno i reorijentacija. Ispod su prikazani načini kontrole preko đojstika za određene načine kretanja.
Mašinski fakultet Sarajevo Mirza Cogo
25

Diplomski rad ABB Robotski sistem IRB 1600
Ikona za inkrementalno kretanje omogućava odabiranje stepena kretanja
robota u mm za linearno kretanje i u radijanima za kretanje po osama i reorijentaciju. Ponuđene opcije su small, medium, large, user- kreira korisnik, te none-isključuje inkrementalno kretanje.
U Run modu se nalaze opcije Single Cycle i Continuous. Odabiremo da li će se
prilikom puštanja programa on izvršiti samo u jednom ciklusu ili će se vrtiti u petlji.
U okviru Speed pruža se mogućnost odabira brzine kretanja robota, slično kao
u prvom okviru, samo što imamo veći izbor opcija.
U nastavku je prikazano kreiranje jednostavnog programa na dva načina. Prvi način je korištenjem virtualnog privjeska za učenje korištenjem RobotStudio-a, a drugi je na realnom robotskom sistemu. Oba načina su opisana paralelno, zato što ista pravila važe kako za realni tako i za virtualni privjesak za učenje.
Na slici 4.6 možemo vidjeti virtualnu stanicu iz RobotStudio-a i pravu stanicu.
Slika 4.6. Virtualna i prava robotska stanica
Da bi se robot mogao kretati potrebno je privjesak držati otkočen pritiskom na ručicu, ili uključiti opciju Enable ukoliko se koristi virtualni privjesak (slika 4.7).
Mašinski fakultet Sarajevo Mirza Cogo
26

Diplomski rad ABB Robotski sistem IRB 1600
Kombinacijom različitih načina kretanja ranije opisanih (po osama, reorijentacija, linearno kretanje) te brzina i inkrementalnog kretanja obezbjeđuje se kretanje robota.
U nastavku je opisnao kako se usvaja novi alat i radni komad (Workobject). Kliknut ćemo na ABB meni, što otvara novi prozor, prikazan na slici 4.8.
Slika 4.7. Ručica privjeska za učenje
Slika 4.8 ABB meni
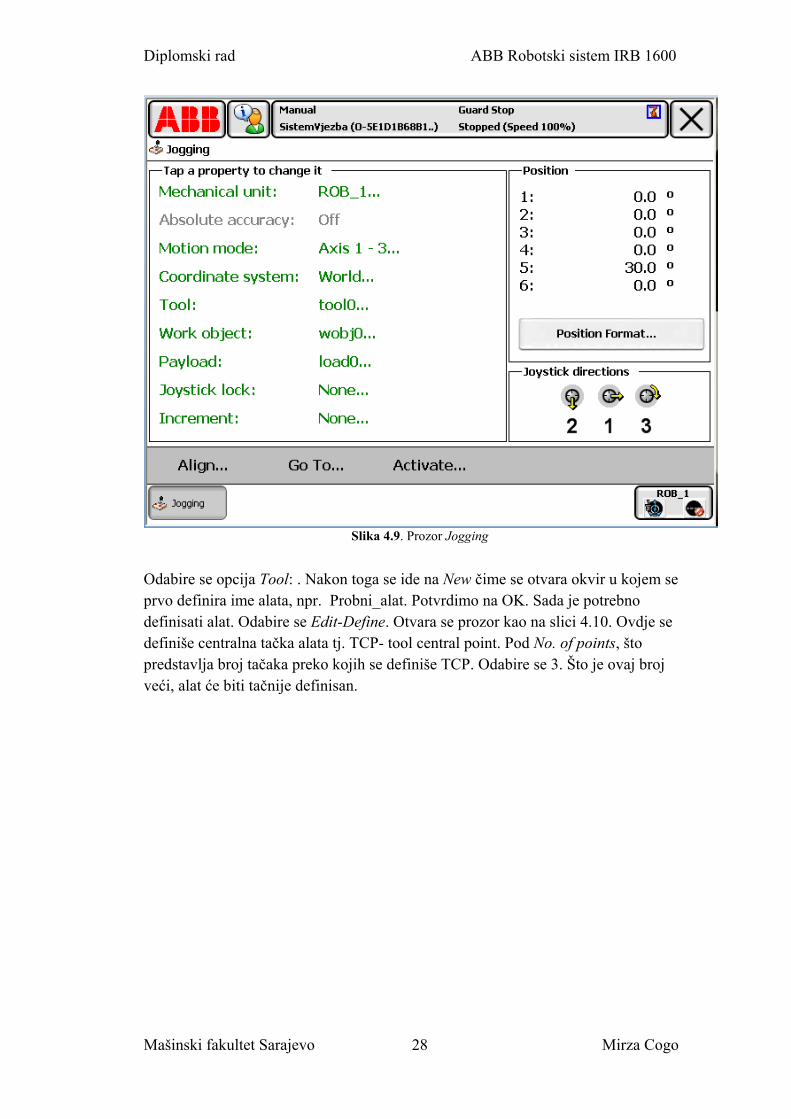
Izabrat ćemo opciju Jogging, čime se otvara novi prozor gdje imamo mogućnost odabira manipulatora, načina kretanja, kordinatnih sistema, alata, radnog objekta itd. (slika 4.9.)
Mašinski fakultet Sarajevo Mirza Cogo
27
Diplomski rad ABB Robotski sistem IRB 1600
Slika 4.9. Prozor Jogging
Odabire se opcija Tool: . Nakon toga se ide na New čime se otvara okvir u kojem se prvo definira ime alata, npr. Probni_alat. Potvrdimo na OK. Sada je potrebno definisati alat. Odabire se Edit-Define. Otvara se prozor kao na slici 4.10. Ovdje se definiše centralna tačka alata tj. TCP- tool central point. Pod No. of points, što predstavlja broj tačaka preko kojih se definiše TCP. Odabire se 3. Što je ovaj broj veći, alat će biti tačnije definisan.
Mašinski fakultet Sarajevo Mirza Cogo
28

Diplomski rad ABB Robotski sistem IRB 1600
Slika 4.10 Prozor Tool frame definition
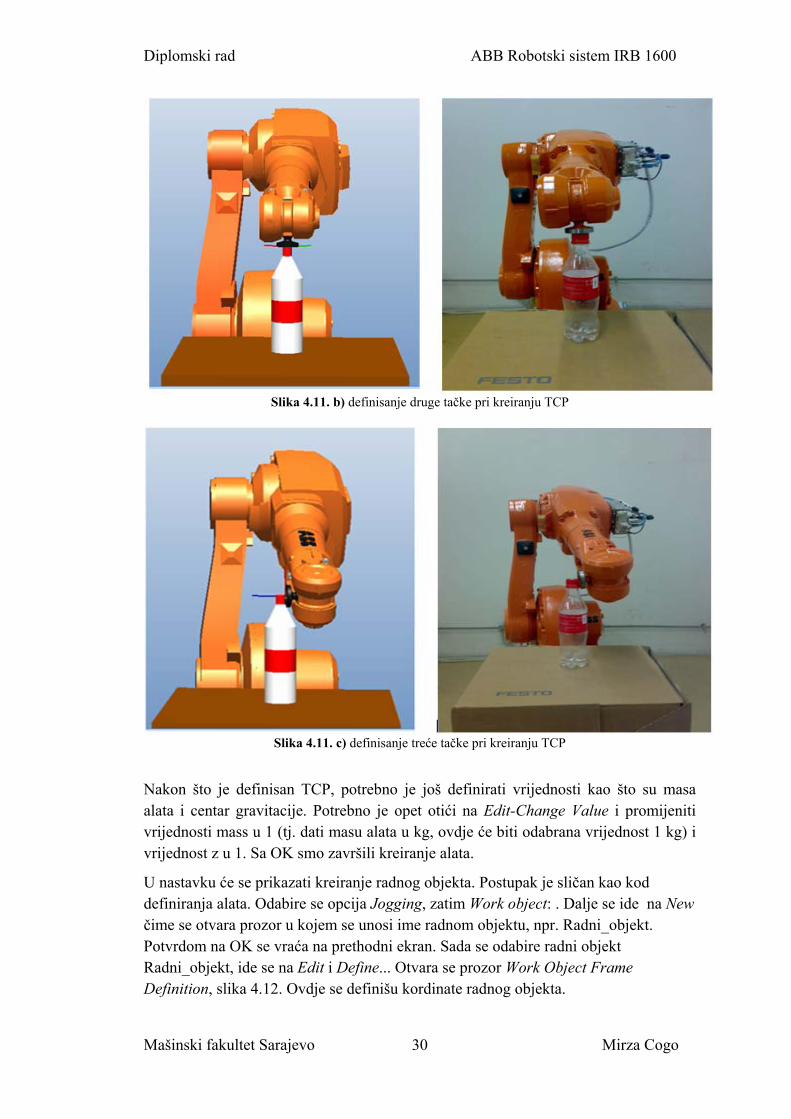
Sada je potrebno ručno dovesti robota u tri tačke kako je to prikazano na slikama 4.11. Nakon što se dovede alat u jednu tačku odabire se Point 1 i klikne na Modify Position. Nakon što su definisane sve tačke, potvrdom na OK kreiran je TCP.
Slika 4.11. a) definisanje prve tačke pri kreiranju TCP
Mašinski fakultet Sarajevo Mirza Cogo
29
Diplomski rad ABB Robotski sistem IRB 1600
Slika 4.11. b) definisanje druge tačke pri kreiranju TCP
Slika 4.11. c) definisanje treće tačke pri kreiranju TCP
Nakon što je definisan TCP, potrebno je još definirati vrijednosti kao što su masa alata i centar gravitacije. Potrebno je opet otići na Edit-Change Value i promijeniti vrijednosti mass u 1 (tj. dati masu alata u kg, ovdje će biti odabrana vrijednost 1 kg) i vrijednost z u 1. Sa OK smo završili kreiranje alata.
U nastavku će se prikazati kreiranje radnog objekta. Postupak je sličan kao kod definiranja alata. Odabire se opcija Jogging, zatim Work object: . Dalje se ide na New čime se otvara prozor u kojem se unosi ime radnom objektu, npr. Radni_objekt. Potvrdom na OK se vraća na prethodni ekran. Sada se odabire radni objekt Radni_objekt, ide se na Edit i Define... Otvara se prozor Work Object Frame Definition, slika 4.12. Ovdje se definišu kordinate radnog objekta.
Mašinski fakultet Sarajevo Mirza Cogo
30

Diplomski rad ABB Robotski sistem IRB 1600
Slika 4.12. Prozor Work Object Frame Definition
Pod User method iz padajućeg menija izabiremo 3 points. Ovdje je potrebno definisati 3 kordinate koje predstavljaju KS radnog objekta, definisanog u odnosu na KS svijeta. To se radi tako što robota ručno dovedemo do željenih pozicija kao na slikama 4.13, te potvrdimo na Modify Position. Kada završimo sa postavljanjem kordinata, potvrdom na OK kreirali smo KS radnog objekta.
Mašinski fakultet Sarajevo Mirza Cogo
31

Diplomski rad ABB Robotski sistem IRB 1600
Slika 4.13. a) definisanje radnog objekta
Slika 4.13. b) definisanje radnog objekta
Mašinski fakultet Sarajevo Mirza Cogo
32

Diplomski rad ABB Robotski sistem IRB 1600
Slika 4.13. c) definisanje radnog objekta
U nastavku je prikazan razvoje jednostavnog programa. U okviru ABB menija (slika 4.8.) izabere se Program Editor, čime se otvara prozor kao na slici 4.14. Odabire se sekcija Modules, gdje se kreira novi modul. Ide se na File-New Module. Ovdje se daje ime novom modulu npr. Probni_modul. Potvrdi se sa OK, izabire Probni_modul i Show Module. Moduli se sastoje iz rutina. Za kreiranje rutine potrebno je odabrati komandu Routines – File – New Routine, gdje trebamo imenovati prvu rutinu, npr. Routine_jedan. Potvrditi sa OK. Sada se ide na Show Routine. Otvori se prozor Add Instruction. Odabire se MoveL. Ova naredba memoriše trenutnu poziciju robota. MoveL pomjera robota po pravoj liniji, MoveC po krivoj.
Mašinski fakultet Sarajevo Mirza Cogo
33

Diplomski rad ABB Robotski sistem IRB 1600
Slika 4.14. Prozor Program Editor
Kada se odabrao MoveL klikne se na *. Ide se na New. U sljedećem prozoru se definišu tačke po kojima će se kretati robot. Potvrdom na OK kreirane su tačke p10 i ona predstavlja poziciju iz koje će se robot kretati. Koristeći joystik manipulišemo robotom i dovedemo ga do željene pozicije, odabiremo MoveL i na taj način kreiramo program. Kada smo završili sa kreiranjem tačaka idemo na Debug, odabiremo PP to Routine. Ovom opcijom vežemo napisani program za rutinu. Potvrdimo sa OK. Program izvršavamo pritisakom na Play dugme na privjesku za učenje, slika 4.15. Robot će se kretati po definisanim tačkama.
Slika 4.15. Dugmad za puštanje programa
Mašinski fakultet Sarajevo Mirza Cogo
34

Diplomski rad ABB Robotski sistem IRB 1600
5. RobotStudio
RobotStudio je softver koji služi za simulaciju i programiranje robotskih
sistema na personalnom kompjuteru. On omogućava offline programiranje, tj. programiranje procesa (robotsko zavarivanje, opsluživnje mašina, pakiranje itd.) preko PC-a, da nismo povezani sa kontrolerom. Na taj način je omogućeno da programi budu pripremljeni, simulirani i testirani unaprijed, što pruža mnoge prednosti, kao što su smanjenje rizika, brže startanje novih procesa, povećanje produktivnosti itd. Offline programiranje podrazumjeva kreiranje virtualne robotske stanice, te programiranje kretanja robotskog manipulatora i dodatne opreme kao što su konvejeri, prese i sl., te prenošenje tako kreiranog programa na realnu fizičku robotsku stanicu. Pored toga RobotStudio služi i za pravljenje simulacija rada robotske stanice, što može poslužiti u fazi pripremanja i planiranja procesa. U prvom dijelu ovog poglavlja dat je uvod u RobotStudio, opis radnog okruženja RobotStudio-a, prikazan je način kreiranja referentnih tačaka i trajektorije robotskog manipulatora, modeliranje fizičkih objekata itd. U poglavlju 5.1. prikazano je nastajanje simulacije, tj. razvoj programa za opsluživanje industrijske prese. U poglavlju 5.2. prikazano je kreiranje jednog offline programa, tj. kreiranje robotskog sistema i stvaranje programa u virtualnom okruženju, te prebacivanje tog programa na realni fizički robotski sistem.
- Pokretanje RobotStudio-a. RobotStudio se pokreće dvostrukim klikom na ikonicu RobotStudio. Nakon pokretanja, prikaže se prozor koji nudi opcije Recent Stations (offline), tj. izbor stanica na kojima smo radili u skorije vrijeme, zatim Recent Controlers (online), te Information. Opcija Recent Stations (offline) omogućuje offline programiranje, te izvođenje simulacije. Odabirom okvira Recent Station (offline) ponuđen je rad uz kreiranje nove stanice New Station, koja dopušta rad na predhodno definiranoj robotskoj stanici. Klikom na New Station otvara se prozor koji omogućava kreiranje nove stanice, sl. 5.1.
Mašinski fakultet Sarajevo Mirza Cogo
35

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.1. Prozor New Station
Postoje tri načina pokretanja nove stanice:
- preko Template System, najjednostavniji način. Ova opcija nudi mogućnost izbora ABB-ovih robotskih manipulatora koji su već povezani sa virtualnim kontrolerom.
- Existing System, stanica sa postojećim sistemom, tj. nadogradnja na sistem koji je već napravljen.
- Empty Station, pravljenje stanice ispočetka, gdje korisnik bira robotski manipulator i povezuje ga sa kontrolerom, za razliku od Template System, gdje je to urađeno automatski.
- Radno okruženje RobotStudio-a. U nastavku je predstavljeno radno okruženje (sučelje) RobotStudio-a, slika 5.2.
Mašinski fakultet Sarajevo Mirza Cogo
36

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.2. Radno okruženje RobotStudia
- Import Library. RobotStudio posjeduje u svojoj bazi podataka modele svih ABB-ovih robotskih sistema. U okviru Home, u prozoru Build Station (slika 5.3), klikom na ikonu ABB Library otvara se prozor koji nudi mogućnost izbora robota, zatim pozicionera te konvejera. Pored ove ikone nalazi se ikona Import Library, koja omogućava unos već gotovih modela za kreiranje radnog okruženje robotske stanice.
Slika 5.3. Ikona ABB Library
Izborom robota, na primjer IRB1600, 3D robotski model se pojavljuje u srednjem prozoru, View1, koji inače zauzima najveći dio okruženja RobotStudio-a, slika 5.2. Inače, u ovom prozoru je prikazano radno okruženje robotske stanice.
- Unos alata. Alat koji je unaprijed definiran se može unijeti iz Import Library, unutar okvira Home. Alat ustvari predstavlja 3D model, sa definisanom geometrijom, momentom inercije, i najvažnijom veličinom TCP (Tool Centar Point), koja ostvaruje interakciju robota sa okruženjem. Pored gotovih modela, postoji i opcija da se kreira
Mašinski fakultet Sarajevo Mirza Cogo
37
Diplomski rad ABB Robotski sistem IRB 1600
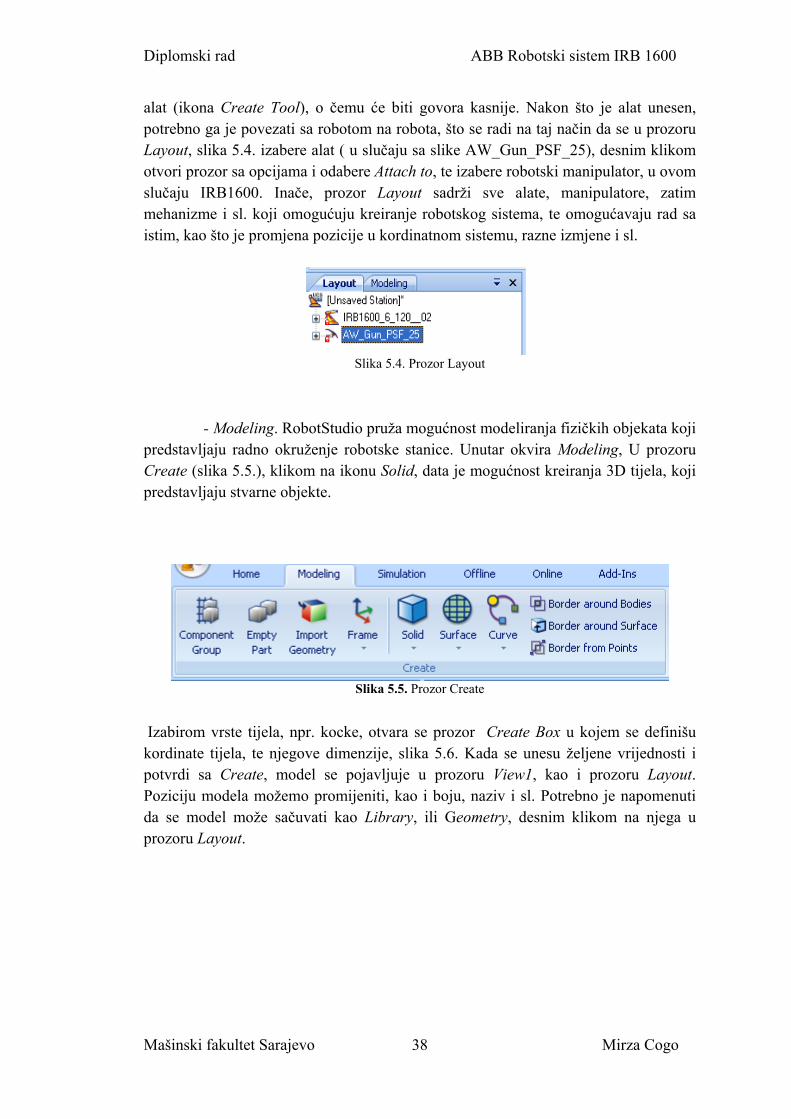
alat (ikona Create Tool), o čemu će biti govora kasnije. Nakon što je alat unesen, potrebno ga je povezati sa robotom na robota, što se radi na taj način da se u prozoru Layout, slika 5.4. izabere alat ( u slučaju sa slike AW_Gun_PSF_25), desnim klikom otvori prozor sa opcijama i odabere Attach to, te izabere robotski manipulator, u ovom slučaju IRB1600. Inače, prozor Layout sadrži sve alate, manipulatore, zatim mehanizme i sl. koji omogućuju kreiranje robotskog sistema, te omogućavaju rad sa istim, kao što je promjena pozicije u kordinatnom sistemu, razne izmjene i sl.
Slika 5.4. Prozor Layout
- Modeling. RobotStudio pruža mogućnost modeliranja fizičkih objekata koji predstavljaju radno okruženje robotske stanice. Unutar okvira Modeling, U prozoru Create (slika 5.5.), klikom na ikonu Solid, data je mogućnost kreiranja 3D tijela, koji predstavljaju stvarne objekte.
Slika 5.5. Prozor Create
Izabirom vrste tijela, npr. kocke, otvara se prozor Create Box u kojem se definišu kordinate tijela, te njegove dimenzije, slika 5.6. Kada se unesu željene vrijednosti i potvrdi sa Create, model se pojavljuje u prozoru View1, kao i prozoru Layout. Poziciju modela možemo promijeniti, kao i boju, naziv i sl. Potrebno je napomenuti da se model može sačuvati kao Library, ili Geometry, desnim klikom na njega u prozoru Layout.
Mašinski fakultet Sarajevo Mirza Cogo
38

Diplomski rad ABB Robotski sistem IRB 1600
gSlika 5.6. Prozor Create Box
- Kreiranje radnog objekta (Workobject). Radni objekt predstavlja kordinatni sistem koji se koristi kako bi se opisala pozicija radnog komada. Radni objekt se sastoji iz User frame, i Object famea. Sve pozicije će se orijentisati prema object frame-u, koji će se orijentisati prema user frame, koji se orijentiše prema World kordinatnom sistemu, što je opisano u poglavlju 4.1. Radni objekat se kreira tako što se klikne na ikonu Create Workobject, unutar okvira Home, u prozoru Path Programming (slika 5.7.) nakon čega se otvara prozor Create Workobject (slika 5.8.) u kojem se određuje ime radnog komada, kordinate, da li robot pomjera radni komad i sl.
Slika 5.7. Prozor Path Programming
Slika 5.8. Prozor Create Workobject
Mašinski fakultet Sarajevo Mirza Cogo
39

Diplomski rad ABB Robotski sistem IRB 1600
- Referentne tačke i trajektorije. Trajektorije koju slijedi prihvatnica reprezentuje se sekvencom tačaka. Osnova programiranja kretanja robotskog manipulatora je u definiranju referentnih tačaka. Za svaku tačku kroz koju prihvatnica treba proći da bi realizirali planiranu trajektoriju, upravljačka jedinica izračunava uglove u zglobovima (tj. komponente unutrašnjih kordinata). Robotski manipulator će, zauzimanjem određenih uglova u zglobovima prihvatnice dovesti u željenu tačku na trajektoriji. Osnova programiranja kretanja robotskog manipulatora je u definiranju referentnih tačaka. memorisanju kordinata prihvatnice po kojim će se robot kretati te memorisanju položaja robotskih ruku. Klikom na ikonu Target u prozoru Path Programming otvara se prozor u kojem se odabire način kreiranja referentnih tačaka. Teach Target omogućava kreiranje referentnih tačaka tako što pomjeramo robota, te sačuvamo njegov položaj u memoriju. Create Target to radi preko unošenja kordinata, tj. orijentaciju alata u odnosu na radni komad. Sa Create Jointtarget se memoriše vrijednost zglobnih varijabli.
Slika 5.9. Načini kreiranja referentnih tačaka
Kreirane referentne tačke, kao i trajektorije će biti prikazani u prozoru Paths&Targets, slika 5.10. Nakon kreiranja referentnih tačaka, potrebno ih je modifikovati, tj. odrediti orijentaciju alata u odnosu na zadatu tačku, zatim položaj robota i sl. Ovo se sve radi u okviru Modify. Nakon što se završi kreiranje tačaka, klikom na ikonu Empty Path se kreira put. U prozoru Paths&Targets kreirane tačke se pretvaraju u trajektoriju tako što se unutar stabla sve referntne tačke (Target_10 do 30 sa slike) prebace u granu Path_10. Sa ovim referentne tačke postaju dio trajektorije.
Mašinski fakultet Sarajevo Mirza Cogo
40

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.10. Prozor Paths&Targets
- Simulacija rada robota. Kada su definisani sve trajektorije- Paths, prije nego se izvrši simulacija rada robotskog sistema gdje se vidi izvršenje zadataka koji su isprogramirani, potrebno je u okviru Simulation Setup postaviti sve puteve, te zadatke koji će se odvijati u robotskoj stanici. Nakon što je to definisano, potrebno je sihronizirati postavke sa virtualnim kontrolerom, klikom na ikonu Synchronise to VC. Sada je sve postavljeno, te se može pustiti simulaciju klikom na ikonu Play. Ovaj dio je detaljnije objašnjen u poglavlju 5.1. U prozoru View1 će se vidjeti 3D prikaz procesa rada robotskog sistema.
Potrebno je napomenuti da je ovaj dio predstavljen poprilično pojednostavljeno, te da se pri projektovanju radne stanice mora uzeti u razmatranje mnogo faktora, kao što su tačne dimenzije okruženja, odovarajući položaj prihvatnice pri kreiranju trajektorije itd. Pored ovih, najjednostavnijih opcija, RobotStudio pruža mogućnost kreiranja mehanizama, bilo korištenjem opcija za modeliranje korištenjem RobotStudio-a ili unosom gotovih CAD modela.
Mašinski fakultet Sarajevo Mirza Cogo
41

Diplomski rad ABB Robotski sistem IRB 1600
5.1. Simulacija robotskog sistema za opsluživanje industrijske prese
U ovom dijelu je prikazano kreiranje relativno jednostavnog programa u RobotStudio-u koji omogućuje rad robotskog sistema na opsluživanju industrijske prese. S obzirom da ne postoji neka ranija konfiguracija, kreira se nova robotska stanica, te se nakon pokretanja RobotStudio-a na početnom ekranu izabire New Station – Empty Station. Potvrdom na OK se dobija prazno početno okruženje RobotStudio-a, kao što je prikazano na slici 5.2. Prvo što treba uraditi je insertovati robotski manipulator u virtualnu stanicu, u ovom slučaju IRB1600. U okviru Home, u prozoru Build Station se iz ABB Library od ponuđenih modela bira IRB600.
Slika 5.11. Prozor Build Station
Potvrdom na OKdefinisan je robotski manipulator koji je sada prikazan u prozoru View1, kao i prozoru Layout, slika 5.12.
Slika 5.12. Prozori View1 I Layout
Nakon odabira manipulatora, potrebno je definirati kontroler. Pomoću ikone Import Library bira se IRC5 kontroler, koji je dio baze podataka RobotStudio-a. Ovaj
Mašinski fakultet Sarajevo Mirza Cogo
42

Diplomski rad ABB Robotski sistem IRB 1600
kontroler nema nikakav uticaj na program već se stavlja da bi pružio što realniji prikaz radnog okruženja. Nakon unosa, program ga postavlja u tačku sa kordinatama (0,0,0) kordinatnog sistema svijeta (World), nakon čega se može definisati njegov položaj.
Slika 5.13. Sekcije RobotStudia
Prvo je u prozoru Layout potrebno selektovati IRC5 kontroler. Nakon toga se prelazi u sekciju Modify, (sekcije su prikazane na slici 5.13.) te u prozoru Position (slika 5.14.) izabrati Set Position, nakon čega se otvara prozor Set Position (slika 5.15.)
Slika 5.14. Prozor Position
U ovom prozoru se određuju položaj ishodišta i orijentacija IRC5 kontrolera. Ponuđen je izbor kordinatnog sistema u odnosu na koji će se geometrija orijentisati. Unošenjem željenih kordinata u polja i potvrdom na Apply mjenjaju se položaj i orijentacija IRC5 kontrolera.
Slika 5.15. Prozor Set Position
Importovat će se modeli koji predstavljaju ogradu Robotske stanice. Iz ABB Library uvodi se Fence Lenght 740, što prestavlja ogradu u radnoj stanici. Nakon što je ova ograda postala dio robotske stanice, potrebno je selektovati je u prozoru Layout, te je nakon toga u okviru Home, unutar prozora Freehand, slika 5.16., potrebno kliknuti na ikonu Move. Sada će za 3D model biti pričvrščen pokretni kordinatni sistem kao na slici 5.17., preko kojeg se može mijenjati položaj u radnom okruženju, jednostavnim povlačenjem u prozoru View1. Potrebno je napomenuti da se pomjeranjem geometrije šire granice radne stanice.
Mašinski fakultet Sarajevo Mirza Cogo
43

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.16. Prozor Freehand
Slika 5.17. 3D model ograde
Sada će se predstaviti modeliranje fizičkih objekata, na jednostavnom primjeru pravljenja 3D kocke koja treba da predstavlja radni stol. Modeliranje se vrši u okviru Modeling. Da bi se kreirala kocka, u prozoru Create, slika 5.18. se iz padajućegi menija Solid bira Box.
Slika 5.18. Prozor Create
Mašinski fakultet Sarajevo Mirza Cogo
44
Diplomski rad ABB Robotski sistem IRB 1600
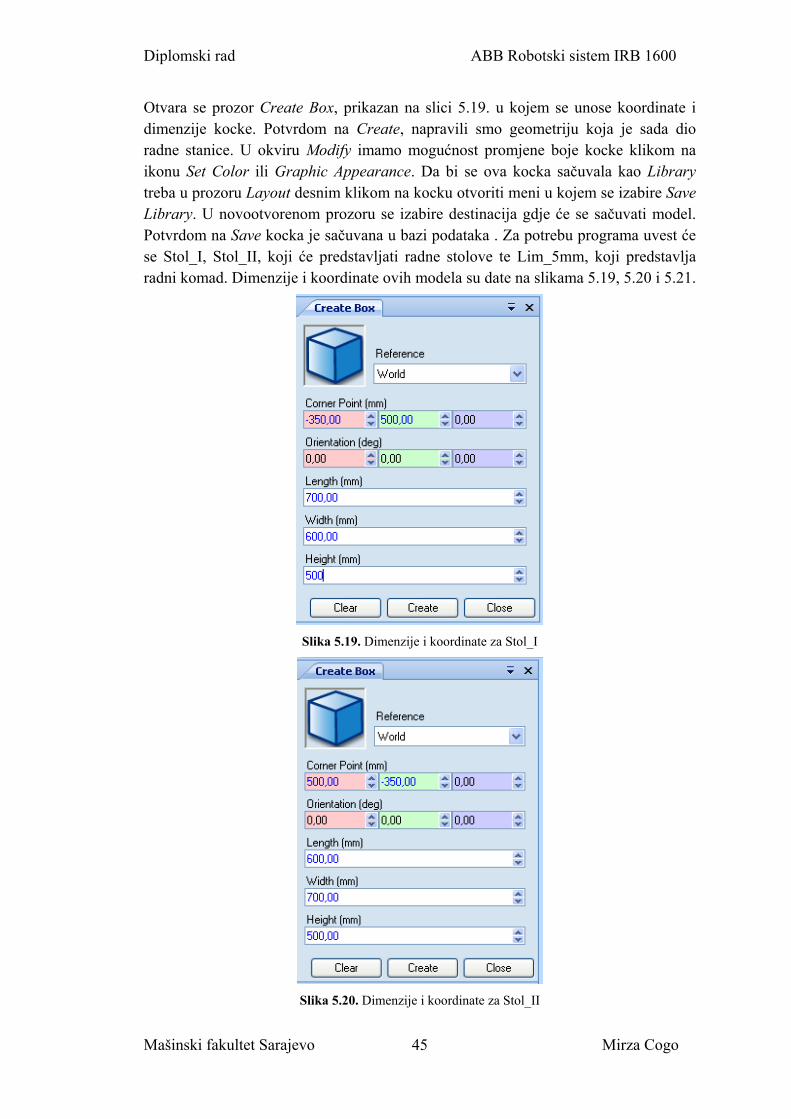
Otvara se prozor Create Box, prikazan na slici 5.19. u kojem se unose koordinate i dimenzije kocke. Potvrdom na Create, napravili smo geometriju koja je sada dio radne stanice. U okviru Modify imamo mogućnost promjene boje kocke klikom na ikonu Set Color ili Graphic Appearance. Da bi se ova kocka sačuvala kao Library treba u prozoru Layout desnim klikom na kocku otvoriti meni u kojem se izabire Save Library. U novootvorenom prozoru se izabire destinacija gdje će se sačuvati model. Potvrdom na Save kocka je sačuvana u bazi podataka . Za potrebu programa uvest će se Stol_I, Stol_II, koji će predstavljati radne stolove te Lim_5mm, koji predstavlja radni komad. Dimenzije i koordinate ovih modela su date na slikama 5.19, 5.20 i 5.21.
Slika 5.19. Dimenzije i koordinate za Stol_I
Slika 5.20. Dimenzije i koordinate za Stol_II
Mašinski fakultet Sarajevo Mirza Cogo
45

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.21. Dimenzije i koordinate za Lim_5mm
U nastavku je predstavljen pojednostavljeni način kreiranja alata. Prvo je potrebno napomenuti da se kod programiranja prave robotske stanice ovom problemu mora pristupiti znatno ozbiljnije, te moramo raspolagati sa tačnim podacima kao što je masa alata te centar gravitacije i moment inercije. Alat će biti vakumski griper, koji će biti predstavljen jednostavnom geometrijom. Prvo je potrebno modelirati pravougaonik sa centralnom tačkom u centru World kordinatnog sistema na način kako je to opisano ranije. Dimenzije alata za ovaj program će biti 400x500x50 mm. Nakon što je kreirana geometrija, prelazi se u okvir Modeling i u prozoru Mechanism, slika 5.19. klikne na opciju Create Tool. Otvara se prozor u kojem kreiramo alat, slika 5.22.
Slika 5.22. Prozor Mechanism
Mašinski fakultet Sarajevo Mirza Cogo
46
Diplomski rad ABB Robotski sistem IRB 1600
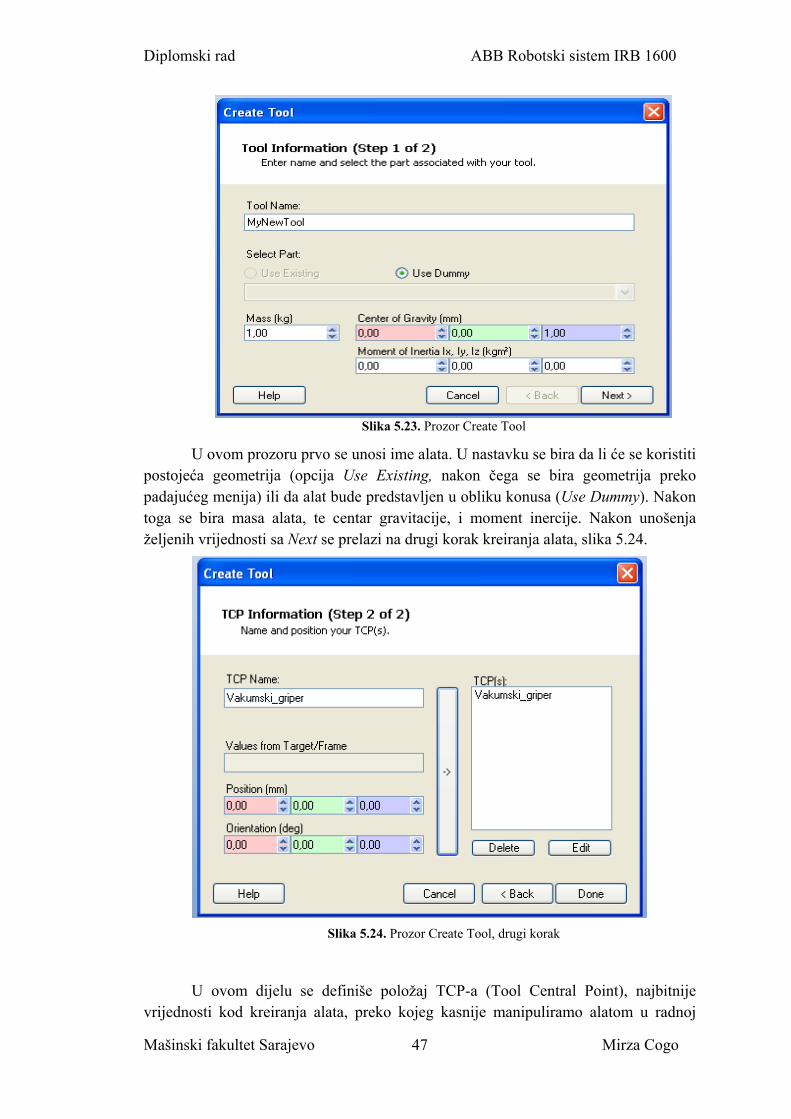
Slika 5.23. Prozor Create Tool
U ovom prozoru prvo se unosi ime alata. U nastavku se bira da li će se koristiti postojeća geometrija (opcija Use Existing, nakon čega se bira geometrija preko padajućeg menija) ili da alat bude predstavljen u obliku konusa (Use Dummy). Nakon toga se bira masa alata, te centar gravitacije, i moment inercije. Nakon unošenja željenih vrijednosti sa Next se prelazi na drugi korak kreiranja alata, slika 5.24.
Slika 5.24. Prozor Create Tool, drugi korak
U ovom dijelu se definiše položaj TCP-a (Tool Central Point), najbitnije vrijednosti kod kreiranja alata, preko kojeg kasnije manipuliramo alatom u radnoj
Mašinski fakultet Sarajevo Mirza Cogo
47

Diplomski rad ABB Robotski sistem IRB 1600
stanici. Nakon što se odredi položaj i orijentacija alata i potvrdi klikom na strelicu, te odabere Done, završen je proces kreiranja alata. Potrebno je napomenuti da alat može imati više TCP-ova, te pri kreiranju istih svaki mora imati različito ime. Nakon što je alat kreiran poželjno ga je sačuvati kao Library u bazu podataka, kako je to opisano ranije. Potrebno je još u prozoru Layout prevući alat do robota, kako je to opisano u sekciji 5.
U nastavku je opisan proces kreiranja mehanizma, u ovom slučaju modela koji predstavlja industrijsku presu. Kao i kod kriranja alata, u praksi se ovaj problem rješava tako što se radi sa konvertovanim 3D CAD modelima sa tačno definisanim geometrijama. Proces kreiranja mehanizma započinje tako što se modelira tijelo i alat prese, koji se nakon toga spajaju u mehanizam. Prvo se postavljanjem jednostavnih geometrija napravi željeni komplikovaniji oblik koji treba da predstavlja tijelo prese. Potom se geometrije spajaju u jednu cjelinu, korištenjem opcije Union, iz prozora CAD Operations, slika 5.25., u okviru Modeling.
Slika 5.25. Prozor CAD Operations
Kada se spoje svi dijelovi u jedan, nastalo tijelo prese je potrebno pohraniti u Library. Isti proces će se ponoviti za alat prese, u ovom slučaju obični pravougaonik odgovarajuće geometrije i položaja u odnosu na tijelo prese. Alat će biti sačuvan kao posebna geometrija. Na slici 5.26. prikazano je tijelo prese, na slici 5.27 alat, a na slici 5.28 tijelo i alat zajedno.
Mašinski fakultet Sarajevo Mirza Cogo
48
Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.26. Tijelo prese
Slika 5.27. Alat prese
Slika 5.28. Tijelo i alat prese
Nakon što su definisane geometrije kreće se sa kreiranjem mehanizma. U okviru Modeling, iz prozora Mechanism, izabire se Create Mechanism. Otvara se prozor Create Mechanism, slika 5.23.
Mašinski fakultet Sarajevo Mirza Cogo
49

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.29. Prozor Create Mechanism
Prvo se definiše ime i tip mehanizma. Poslije toga potrebno je redom definisati stavke iz prozora: Links, Joints, Frames, Calibration i Dependencies. Kod tipa Device potrebno je definisati samo polja Links i Joints. Odabirom linkova otvara se prozor Create Link, slika 5.24.
Slika 5.30. Prozor Create Link
Odabire se geometrija tijela prese i postavlja kao base link, tj. kretanje mehanizma se definira u odnosu na nju. Pored tijela uvodi se i alat prese kao drugi link. Sa opcijom Apply se potvrđuju kreirani linkovi. Može se primjetiti da je sada u prozoru Create Mechanism stavka Joints poprimila zelenu boju, što znači da je definisana. Potreno je još definisati stavku Joints. Klikom na istu dobija se prozor Create Joint, slika 5.31.
Mašinski fakultet Sarajevo Mirza Cogo
50

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.31. Prozor Create Joint
U ovom prozoru se definiše kretanje Linkova u odnosu na Base Link koji je nepokretan tj. kretanje alata prese u odnosu na tijelo. Kako je kretanje translatorno bira se prizmatični zglob odabirom Joint Type Prismatic. Nakon toga pod Joint Axis unijeti kordinate početnog i krajnjeg položaja alata. U Joint Limits odrediti početnu i krajnju poziciju alata. Kada potvrdimo sa OK, definisali smo sve stavke u prozoru, možemo odabrati Compile Mechanism. Ovdje definišemo položaje mehanizma. Odabirom Add otvara se prozor Create Pose, Slika 5.32. gdje određujemo pozicije mehanizma. Dovoljno je kreirati 2 položaja, npr. Pose1_gore i Pose2_dole, sa kojima su definisani krajnji gornji i krajnji donji položaj alata..
Mašinski fakultet Sarajevo Mirza Cogo
51

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.31. a) Prozor Create Pose
Slika 5.31 .b) Prozor Create Pose
Nakon definisanja krajnjih položaja, odabire se Set Transition Times, slika 5.32. gdje se definiše brzina kretanje mehanizma. Kada smo ovo definisali mehanizam je završen. U okviru Modify, u prozoru Motion, može se izabrati padajući meni Move To Pose, gdje možemo provjeriti kretanje mehanizma. Nakon što je mehanizam završen, preporučljivo ga je spasiti kao biblioteku. Ovaj mehanizam sada može biti importovan u radnu stanicu.
Mašinski fakultet Sarajevo Mirza Cogo
52

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.32. Prozor Set Transition Times
Sada kada su uvedene kreirane sve potrebne komponente može se kreirati stanica. U okviru Home ode se na prozor Build Station, te sa padajućeg menija odabere Robot System. Izabire se stavka From Layout što kreira novu radnu stanicu prema postojećem rasporedu. Radna stanica će izgledati kao na slici 5.33.
Slika 5.33. Izgled radne stanice
Nakon što je stanica kreirana može se početi sa programiranjem. U sljedećem dijelu je opisano kreiranje radnog objekta, definiranje referentnih tačaka, pravljenje trajektorije, te na kraju simuliranje programa.
Mašinski fakultet Sarajevo Mirza Cogo
53

Diplomski rad ABB Robotski sistem IRB 1600
Prvo je potrebno kreirati radni objekt (Workobject) za sistem. Kao što je objašnjeno ranije, radni objekt predstavlja kordinatni sistem u odnosu na koji se definiše putanja i orijentacija alata. Kreiramo ga klikom na ikonu Workobject u prozoru Path Programming, unutar okvira Home.
Slika 5.34. Prozor Path Programming
Kada se izdefinišu vrijednosti u novootvorenom prozoru kao na slici 5.35. potvrdom na Create kreiramo radni objekt.
Slika 5.35. Prozor Create Workobject
Radni objekt se sada nalazi u prozoru Paths&Targets te će sve pozicije i putevi biti kreirani u odnosu na njega. Za potrebe simulacije nije potrebno definisati kordinate, već se mogu ostaviti osnovne vrijednosti. Potrebno je provjeriti da li je u prozoru Settings, slika 5.30. unutar okvira Home izabran željeni Workobject i Tool, u ovom slučaju Radni_objekt i ALAT.
Mašinski fakultet Sarajevo Mirza Cogo
54

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.36. Prozor Settings
Kada je definisan radni objekt, definišu se referentne tačake (Targets), koje se kasnije vežu u trajektoriju. U nastavku je prikazano nekoliko načina memorisanja referentnih tačaka, te je predstavljeno manipuliranje robotom. Najjednostavniji način za manipulaciju robotom je preko prozora Freehand, koji je prikazan ranije. Unutar ovog prozora označi se opcija Jog Joint. Jednostavnim pomjeranjem miša, klikom na odgovarajući zglob robota ostvaruje se kretanje u zglobu. Drugi način je opcija Jog Linear, pomoću koje vršimo manipulaciju pomjeranjem prihvatnice pomoću miša. Za sljedeći način potrebno je selektovati robota u prozoru Layout. Sada se u okviru Modify unutar prozora Motion, slika 5.37. može izabrati opcija Mechanism Joint Jog, nakon čega se otvara prozor Joint jog, slika 5.38.
Slika 5.37. Prozor Motion
Slika 5.38. Prozor Joint jog
Ovdje se nudi mogučnost tačnijeg pomjeranja uzglobovima. Opcija Mechanism Linear Jog nudi slične opcije. Pored navedenih imamo i druge načine pomjeranja robota. Kada se dovede robot u željenu poziciju može se spasiti referentna tačka. U okviru Home, unutar prozora Path Programing izabire se padajući meni Target, slika 5.39.
Mašinski fakultet Sarajevo Mirza Cogo
55

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.39. Padajući meni target
Klikom na Teach Target pohranjuje se trenutni položaj robota. Potrebno je napomenuti da će se referentna tačka pojaviti u prozoru Paths&Targets kao grana radnog objekta Sljedeći način pravljenja referentnih tačaka je preko opcije Create Target, gdje se otvara prozor unutar kojeg se unose kordinate referentne tačke. Izborom ove opcije potrebno je još definisati položaj robotskih osa. Nakon izabira kreirane referentne tačke unutar prozora Layout , sa desnim klikom miša izabire se padajući meni i ide se na opciju Jump To Target. Ovim se otvara prozor Select Robot Configuration, unutar kojeg se mogu odabrati različite konfiguracije robotskih osa.
Nakon što su definisane sve potrebne referentne tačke može se kreirati trajektorija. Unutar okvira Home, u prozoru Path Programing klikne se na ikonu Empty Path. Ovim je kreirana prazna trajektorija koja postaje grana unutar prozora Paths&Targets. Prevlačenjem željenih referentnih tačaka u trajektoriju one postaju dio iste. Na slici 5.35. je prikazan prozor Paths&Targets sa potpuno otvorenim stablom. Da bi se provjerila trajektorija potrebno je desnim dugmetom miša iz stavke trajektorije izabrati Move Along Path. Nakon što RobotStudio završi sa učitavanjem, robot bi trebao da se kreće duž definisanih tačaka. U nastavku je opisano još postavljanje simulacije, usklađivanje rada stanice sa virtualnim kontrolerom te puštanje simulacije.
Mašinski fakultet Sarajevo Mirza Cogo
56

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.40. Prozor Paths&Targets
Prvo će se opisati rad sa I/O simulatorom. U okviru Simulation, u prozoru Monitor, slika 5.36 odabire se stavka I/O Simulator. Ovim se otvara prozor I/O simulatora unutar kojeg definišemo signale stanice.
Slika 5.41. Prozor Monitor
Najprije se pod Select System odabire stavka Station Signals. Sada je potrebno definisati signale. Za potrebe simulacije potrebna su 4 signala, 2 koja definišu prihvatanje i otpuštanje radnog komada od strane alata i 2 koja definišu spuštanje i podizanje mehanizma prese. Odabirom Edit Signals otvara se prozor Station Signals. Ovdje će se dodati 4 digitalna signala: Pokupi_komad, Ispusti_komad, Spusti_presu, Digni_presu. Nakon što se završilo sa dodavanjem signala i potvrdilo sa OK, signali
Mašinski fakultet Sarajevo Mirza Cogo
57

Diplomski rad ABB Robotski sistem IRB 1600
se pojavljuju u prozoru Station Signal, što je prikazano na slici 5.42. Sljedeći korak je definisanje ovih signala u Event Menager.
Slika 5.42. Prozor Station Signals
U Event Menager se ulazi preko prozora Configure u okviru Simulation. Kako bi se definisao signal za podizanje mehanizma prese potrebno je ići na Add, čime se otvara prozor Create New Event. Iz padajućeg menija Activation odabiremo Simulation, a pod Event Trig Type odabiramo Simulation time. Sa Next prelazimo u drugi prozor, gdje se definira u kojem trenutku simulacije će se aktivirati signal. Sa Next prelazimo u sljedeći prozor gdje se pod Set Action Type odabire Move Mechanism To Pose. U sljedećem prozoru se odabire presa i kornji položaj mehanizma koja je ranije definisan. Sa Finish se završava kreiranje signala. Na skoro isti način se definišu signali, za signale Pokupi_komad i Ispusti_komad potrebno je naznačiti koje objekte vežemo jedan na drugi, u ovom slučaju Lim_5mm i Vakumski_griper.
Da bi pokrenuli simulaciju mora se još sihronizirati stanica za virtualni kontroler. To se radi u okviru Offline, unutar prozora Synchronise, klikom na ikonu Synchronize to VC.
Slika 5.43. Prozor Sychronize
U prozoru Synchronize to Virtual Controler potrebno je označiti sve stavke koje treba sihronizovati. Kada je ovo gotovo potrebno je još otići u Simulation Setup,slika
Mašinski fakultet Sarajevo Mirza Cogo
58

Diplomski rad ABB Robotski sistem IRB 1600
5.39. te tu prevesti željene trajektorije iz prozora Avaible Procedures u prozor Main Sequence.
Slika 5.44. Prozor Setup Simulation
Sada je sve spremno za pokretanje simulacije. Simulacija se pokreće pritiskom na dugme Play, a željene signale možemo davati ručno preko I/O simulatora, ili će se aktivirati sami u određenom trenutku simulacije.
Mašinski fakultet Sarajevo Mirza Cogo
59

Diplomski rad ABB Robotski sistem IRB 1600
5.2 Program
U ovom poglavlju je prikazano kako kreirati virtualni robotski sistem u RobotStudio-o, programirati kretanje robotskog manipulatora definiranjem trajektorije kao sekvence tačaka, i zatim kako prenijeti taj program na realni fizički robotski kontroler. Drugim riječima, ovdje je pokazan postupak offline programiranja. Kao što je ranije rečeno, offline programiranje je programiranje procesa na PC-u koji nije povezan sa kontrolerom. U RobotStudio-u se kreira program koji u sebi sadrži informacije o radnoj stanici uz definiranje trajektorije kretanja prihvatnice. Pored ovoga program treba da ima informacije o radnom objektu i alatu. Ovaj program se sačuva na USB stick, te prenosi na fizički robotski kontroler. Potrebno je napomenuti još da bi bili u mogućnosti da napravimo offline program koji radi na stvarnoj robotskoj stanici, potrebno je posjedovati RobotWare licence key. On ustvari predstavlja specijalni kod koji definiše proizvođač robota. Sastoji se od Controller key i Drive key. Ovi kodovi se unose prilikom programiranja kako bi program mogao prepoznati robotski manipulator i kontroler.
Prvo je potrebno pokrenuti RobotStudio. Odabiremo New Station, zatim Empty Station. Potvrdom na OK dobivamo praznu stanicu. Prelazimo u okvir Offline i unutar prozora Configuration odabiremo System Builder, slika 5.40.
Slika 5.40. System Builder
Sada imamo otvoren prozor System Builder kao na slici 5.41. U ovom prozoru se može napraviti novi sistem, zatim kreirati novi sistem iz već postojećeg korištenjem opcije Create from Backup, promijeniti već postojeći sistem sa Modify. Dalje mogućnosti su kopiranje sistema sa Copy, zatim brisanje sistema sa Delete.
Mašinski fakultet Sarajevo Mirza Cogo
60

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.41. Prozor System Builder
Za kreiranje novog programa se ide na Create New. Otvara se New Controller System wizard, slika 5.42. koji omogućuje definiranje robotskog sistema “korak po korak”.
Slika 5.42. Prozor New Controller System
Potvrdom na Next se prelazi u sljedeći prozor koji omogućava davanje imena sistemu, npr. SistemVjezba. Sa Next se prelazi u sljedeći prozor gdje je potrebno navesti Controller Key. Controller Key se dostavlja zajedno sa robotskim sistemom i omogućava sihroniziranje programa kreiranog u RobotStudiu i robotskog sistema. Potrebno je unijeti iMssssyCyS-r6ssMsM6ssss9. U sljedećem prozoru se unosi Drive Key, za koji važi sve kao i za Controller Key. Drive Key služi za sihroniziranje
Mašinski fakultet Sarajevo Mirza Cogo
61

Diplomski rad ABB Robotski sistem IRB 1600
programa i robotskog kontrolera. Pod Drive Key potrebno je unijeti keKJs-s6tyJpC. Nakon unošenja Drive Key-a završene su sve potrebne operacije za ovaj program i može se potvrditi sa Finish. U sljedećim prozoru se namještaju dodatne opcije u programu, kao što su ubacivanje konvejera, zatim usklađivanja ukoliko postoji više robota u stanici itd. Može se vidjeti da je sistem kreiran u prozoru System builder.
U nastavku će biti objašnjen način kreiranja jednostavnog programa koji omogućava da se prihvatnica robota kreće od tačke x do tačke y, slika 5.43. Ide se na New Station-Existing System-SistemVjezba-OK. Sada je potrebno kreirati trajektoriju na jedan od od načina opisanih u prethodnom poglavlju i kreirati trajektoriju. Najednostavniji način je korištenje ranije opisanih opcija Jog Joint i Teach Target. Za potrebe ovog programa može se koristiti i osnovni tj. default radni objekt wobj0 i alat tool0. Kreira se novi put Empty Path od memorisanih tačaka. Kada je završeno kreiranje trajektorije potrebno je provjeriti simulaciju kretanja manipulatora. Ide se na okvir Offline i odabire Synchronise to Virtual Controller. Potvrdi se na OK, te u okviru Simulation odabira Simulation Setup. Potom se bira put Path_10. Potrebno je još resetovati kontroler. Ide se na okvir Offline i pod Restart odabire Warmstart. Na Play se pokreće simulacija. Na slici 5.43 dat je izgled kreirane stanice sa jednostavnom trajektorijom.
Slika 5.43. Robotska stanica
Mašinski fakultet Sarajevo Mirza Cogo
62

Diplomski rad ABB Robotski sistem IRB 1600
Nakon što je završeno kreiranje programa potrebno je taj isti program sačuvati. Unutar prozora Offline, slika 5.44 potrebno je prvo razviti stablo, zatim u grani RAPID sa desnim dugmetom miša izabrati stavku T_ROB1. Izabirom Save Program As otvara se prozor Save As.
Slika 5.44. Prozor Offline
U prozor Save As se unosi ime programa, a pod Save in: se bira destinaciju file-a. Kao destinacija može biti odabrana bilo koja eksterna memorijska jedinica, npr. Memorijski usb stick, preko kojeg program može biti direktno prenesen na robotski sistem. Prilikom spašavanja ovog file-a program kreira još jedan file koji predstavlja modul, preporučljivo je sačuvati ova dva file-a u isti folder, kako bi ih program mogao prepoznati. Potvrdom na Save program je sačuvan.
Mašinski fakultet Sarajevo Mirza Cogo
63

Diplomski rad ABB Robotski sistem IRB 1600
Sada je potrebno USB stick umetnuti u USB port realnog fizičkog IRC5 kontrolera. Nakon toga se uključuje IRC5 kontroler i namješta na ručni način rada kako je opisano u poglavlju 4.2. Na privjesku za učenje odabire se ABB meni te Program Editor. Ukoliko nema ranije unešenih programa otvara se prozor kao na slici 5.45.
Slika 5.45. Prozor No Program
Pritiskom na dugme Load otvara se prozor prikazan na slici 5.46. Pomoću ikone koja izgleda kao datoteka (pogledati sliku 5.46.) pretražuju se file-ovi i kada se nađe odgovarajući, označi se i potvrdi na OK. Nakon toga potrebno je izabrati modul. U sekciji Modules bira se postojeći ili kreira novi. Ovi koraci su takođe opisani u poglavlju 4.2. Nakon izbora modula, potrebno je još kreirati rutinu, te uraditi Debug- PP to routine (kao kod ručnog načina rada.) Prozor sa programom bi trebao izgledati kao na slici 5.46. Klikom na dugme Play na privjesku za učenje dolazi do izvršenja programa.
Mašinski fakultet Sarajevo Mirza Cogo
64

Diplomski rad ABB Robotski sistem IRB 1600
Slika 5.46. Prozor za izbor programa
Slika 5.47. Prozor sa programom
Mašinski fakultet Sarajevo Mirza Cogo
65

Diplomski rad ABB Robotski sistem IRB 1600
6. Zaključak
Prednosti koje robot unosi u industrijsku proizvodnju su mnogobrojne. Pored očite ekonomske isplativosti, tu su i prednosti kao što su brži rad, bolji kvalitet izrađenih dijelova ili zavarenih spojeva. Takođe treba napomenuti da neke grane industrije ne bi postojela bez primjene robota, kao što je izrada mikroprocesora. Pored svega navedenog, najbitnija je humana strana razvoja robotike, tj. zamjena čovjeka u poslovima koji su opasni po zdravlje, dosadni ili previše teški da bi ih obavljao čovjek. Pored industrije, robotika se polako integrira u mnoge druge aspekte ljudskog života. Neizbježna je sve veća primjena robota u npr. medicini, ratnoj industriji te integracija u domove ljudi. Sa sve većim razvojem umjetne inteligencije zatim elektronike uopšte, tek treba da vidimo šta budućnost donosi.
U ovom diplomskom radu je dat uvod u industrijsku robotiku, historijski razvoj te objašnjenje osnovnih pojmova vezanih za istu te različite primjene industrijskih robota. Naglasak je stavljen na robotski sistem IRB1600. Ostatak rada se bavi kontrolom robotskog sistema IRB1600 primjenom privjeska za učenje i offline programiranjem primjenom softverskog paketa RobotStudio. Objašnjen je rad u RobotStudio-u, te su opisane njegove mogućnosti. Mogućnosti koje offline programiranje pruža u industriji su ogromne. Moguće je unaprijed isplanirati procese kao što su zavarivanje, montaža, opsluživanje mašine, pakiranje i sl. u virtualnom okruženju. Pored toga, pružena je velika mogućnost prilagođavanja procesa, zatim brza zamjena istih bez prekidanja rada robotske stanice. Sve ovo se ogleda u ekonomskoj isplativosti upotrebe offline programiranja.
Softverski paket RobotStudio je jako kompleksan, te pruža ogromne mogućnosti. Može se reći da ovaj diplomski rad predstavlja uvod u rad sa RobotStudiom, te da ostavlja dosta prostora za dalji rad. Preporuka za neki budući rad bi bila kreiranje alata za neku industrijsku aplikaciju, kako virtualnog tako i realnog fizičkog, npr. vakumki griper, gdje će tačno biti definisane vrijednosti kao što su centar gravitacije, masa ili TCP. Dalje, u poglavlju 5.2. prikazana je osnova u kreiranju robotske stanice, te je ostavljeno dosta prostora za unapređenje i kreiranje različitih kompleksnijih programa. Slično vrijedi i za pravljenje simulacije, moguće je napraviti simulaciju automatizacije raznih industrijskih procesa, krenuvši od pakiranja, zavarivanja, bojenja itd. Pored toga se može obraditi rad sa više robotskih manipulatora na jednom kontroleru. Takođe, u ovom radu prilikom kreiranja virtualnih robotskih stanica, korištene su jednostavne geometrije koje treba da predstavljaju fizičke objekte u robotskoj stanici. RobotStudio pruža mogućnosti prebacivanja CAD modela u svoju bazu podataka. Jedna od tema bi mogla biti modeliranje alata, mehanizama ili drugih objekata u Catiji ili nekom sličnom softveru i prebacivanje tih modela u bazu podataka RobotStudio-a gdje bi se isti iskoristili za kreiranje virtualne robotske stanice.
Mašinski fakultet Sarajevo Mirza Cogo
66
Diplomski rad ABB Robotski sistem IRB 1600
7. Literatura
[1] F. Kreith. Mechanical Engineering Handbook. CRC Press LLC, 1999. [2] Siciliano&Khatib. Springer Handbook of Robotics. Springer, Berlin, 2008. [3] P. Sandin. Robot Mechanisms and Mechanical Devices Illustrated. McGraw-Hill, 2003 [4] B. Siciliano. Robotics, modeling planning and control. Springer, London 2009. [5] T. Šurina. Industrijski roboti. Školska knjiga, Zagreb1990. [6] Manual. RobotStudio 4.0. ABB, 2006. [7] Operating Manual. RobotStudio 5.10. ABB, 2007. [8] Navodila za vaje na krmilniku IRC5, Manual [9] www.abb.com [10] www.robotstudio.com [11] www.youtube.com
Mašinski fakultet Sarajevo Mirza Cogo
67