diseño de prótesis de mano servoactuada y fabricación de prototipo con técnicas de...
TRANSCRIPT

1
CARRERA DE INGENIERÍA MECÁNICA
DISEÑO DE PRÓTESIS DE MANO SERVOACTUADA Y FABRICACIÓN DE PROTOTIPO CON TÉCNICAS DE
IMPRESIÓN 3D.
María Jimena López Morillo
Mg. Alejandro T. Quispe M. Director
Mg. Claus Germán Smitt Co-Director
Miembros del jurado: Ing. Agustín Coleff (Instituto Balseiro, Centro Atómico Bariloche) Ing. José Relloso (Instituto Balseiro, Centro Atómico Bariloche)
Junio, 2018
Instituto Balseiro Universidad Nacional de Cuyo
Comisión Nacional de Energía Atómica Argentina

2
Índice de contenido
Resumen ...........................................................................................................................4
Abstract ............................................................................................................................5
1. Introducción ...........................................................................................................6
1.1. Motivación .............................................................................................................7
1.2. Objetivos de la tesis .............................................................................................10
2. Principio de funcionamiento y modelado ............................................................11
2.1. Estructura de mano ..............................................................................................11
2.2. Simplificaciones para el modelado ......................................................................17
2.3. Selección del mecanismo de flexión ...................................................................17
2.4. Selección del mecanismo de extensión ...............................................................19
2.5. Modelo resultante ................................................................................................24
2.6. Conclusión ...........................................................................................................26
3. Diseño y fabricación de los prototipos de los dedos ...........................................27
3.1. Prototipo funcional ..............................................................................................27
3.1.1. Diseño ..............................................................................................................27
3.1.2. Resultados ........................................................................................................28
3.2. Segundo prototipo con altura de tendón variable ................................................29
3.2.1. Diseño ..............................................................................................................29
3.2.2. Resultados ........................................................................................................30
3.3. Prototipo final ......................................................................................................31
3.3.1. Diseño ..............................................................................................................32
3.3.2. Resultados ........................................................................................................33
3.4. Conclusiones .......................................................................................................33
4. Implementación y validación del modelo en un entorno simulado .....................35
4.1. Implementación del modelo en la simulación .....................................................35
4.2. Validación de la simulación ................................................................................37

3
4.2.1. Medición de la trayectoria del prototipo de dedo ............................................37
4.2.2. Contraste con la simulación .............................................................................40
4.3. Conclusión ...........................................................................................................42
5. Diseño de la mano ...............................................................................................43
5.1. Diseño de los dedos restantes ..............................................................................43
5.1.1. Diseño del pulgar .............................................................................................44
5.2. Diseño de la palma ..............................................................................................45
5.3. Ensamble .............................................................................................................46
5.4. Conclusiones .......................................................................................................47
6. Fabricación, automatización y ensayos ...............................................................48
6.1. Fabricación ..........................................................................................................48
6.1.1. Impresión y ensamble de los dedos .................................................................48
6.1.2. Impresión y ensamble del pulgar .....................................................................49
6.1.3. Impresión y ensamble de los dedos en la palma ..............................................49
6.2. Automatización ...................................................................................................50
6.3. Ensayos ................................................................................................................53
6.4. Conclusiones .......................................................................................................53
7. Conclusiones .......................................................................................................54
8. Anexo ..................................................................................................................56
8.1. Código para el movimiento de los servomotores ............................................56
8.2. Plano de la probeta de Flex ..............................................................................57
8.3. Plano del primer prototipo ...............................................................................59
8.4. Plano del segundo prototipo ............................................................................63
8.5. Plano del tercer prototipo ................................................................................67
8.6. Planos de la mano en conjunto y sus partes .....................................................70
9. Agradecimientos ..................................................................................................83
10. Bibliografía ..........................................................................................................84

4
Resumen
En el presente trabajo se describe el procedimiento que se llevó a cabo para el
diseño y construcción de un prototipo de una prótesis de una mano servoactuada. Dicho
prototipo se diseñó con herramientas CAD y se fabricó por medio de técnicas de
impresión 3D. Se partió de los mecanismos de movimiento de una mano real para llegar a
un modelo simplificado, el cual se tomó como base para los mecanismos de
funcionamiento de la prótesis. Se diseñaron y fabricaron tres prototipos de un dedo, que
permitieron extraer conclusiones de vital importancia para el desarrollo del prototipo final,
considerando además conceptos de antropomorfismo. Se detalla, además, la
implementación de los dedos de la mano en un entorno de simulación, en donde se puede
cambiar parámetros del modelo de forma sencilla y obtener el comportamiento del mismo
en forma inmediata. La prótesis se montó a un banco de comando, donde se encuentran los
servomotores encargados de realizar los movimientos de la misma. Dichos actuadores
fueron controlados mediante una placa de desarrollo

5
Abstract
The present work describes the procedure of designing and building a servo-
actuated hand prosthesis prototype. This device was designed with CAD tools and
manufactured employing 3D printing techniques. The design stage included the analysis
and modeling of the human hand's behavior in order to produce a simplified model, which
is later used as the basis of all the mechanisms built. Three finger prototypes were designed
and assembled, which enabled to draw key insights for developing the final prosthesis,
considering anthropomorphism concepts as well. Moreover, the implementation of the
prosthesis' fingers in a simulation environment is introduced, where model parameters can
be easily modified, obtaining immediate results about the finger's kinematic an dynamic
behavior. Finally, the prosthesis prototype was mounted on a command bench along with
the servos responsible for driving its movements. The servos where controlled by a
development board.

6
1. Introducción
Diversos autores confirman que las manos han permitido la evolución del ser
humano, significando un importante rol en el desempeño físico e intelectual.
Se sabe de dicha importancia desde la antigüedad, motivo por el cual se han hecho
múltiples intentos por suplir las funciones de las manos en personas incapacitadas para
usarlas. La primera prótesis de mano encontrada data del 2000 a.C., fue encontrada en una
momia egipcia. La prótesis estaba sujeta al antebrazo por medio de un cartucho adaptado
al mismo. La misma tenía una función meramente estética, era una prótesis rígida y con la
mano tallada en madera. En la Figura 1 se muestra la prótesis.
Figura 1 Prótesis de madera encontrada en una momia egipcia
No fue hasta el año 200 a.C. que se encontraron prótesis funcionales. Se
encontraron diseños que permitían levantar objetos, con el pulgar en oposición o con
ganchos. Las mismas se construyeron de hierro y otros materiales, en la Figura 2 se ve un
ejemplo.
Figura 2. Reconstrucción de una prótesis hallada en el año 200 a.C.

7
A partir del año 1400 aparecen diseños de prótesis móviles. Se encontraron algunos
que poseían los dedos flexibles, los cuales eran flexionados pasivamente, pudiendo fijarse
mediante un mecanismo de trinquete y poseyendo además una muñeca flexible. En la
Figura 3 se muestra la prótesis mencionada [1].
Figura 3. Prótesis construida en el año 1400.
Para más información consultar la bibliografía (1) (2) (3) (4).
1.1. Motivación
El avance en el diseño de las prótesis está directamente relacionado con el avance
en el estudio de materiales, así como también en el desarrollo tecnológico y en el
entendimiento de la biomecánica del cuerpo humano.
Las diversas tecnologías de impresión 3D desarrollada en los últimos años han
permitido fabricar prototipos con piezas complejas a muy bajo costo y con tiempos
relativamente inmediatos. Si a ello se le suma la reducción de los tamaños y la aparición de
actuadores eléctricos y sistemas embebidos, es posible obtener sistemas mecatrónicos
complejos con dimensiones y pesos optimizados. Uno de los ámbitos donde la conjunción
de las tecnologías mencionadas ha tenido alto impacto, es el desarrollo de prótesis
servoactuadas. Actualmente existen diseños que proponen distintos métodos de actuación y
control según sean las necesidades y posibilidades de las personas que las necesitan.
Hoy en día las prótesis comerciales más usadas suelen ser costosas y pesadas. Una
prótesis que brinda una solución, con los movimientos más básicos de la mano para poder
realizar tareas sencillas, cuesta alrededor de 30,000 a 70,000 dólares. Las mismas podrían

8
dividirse en dos grandes ramas según su principio de funcionamiento, las prótesis
eléctricas y neumáticas.
Las prótesis eléctricas utilizan motores eléctricos como actuadores para la de
flexión y extensión de los dedos. Se pueden controlar de varias formas, ya sea con un
servocontrol, control con pulsador o botón con interruptor con arnés. Su adquisición y
reparación son costosas. La principal desventaja de este tipo de prótesis es que suelen pesar
entre 2 y 3 kilogramos cuando una mano humana suele pesar 600 gramos. Un ejemplo de
este tipo de prótesis se ve en la Figura 4.
Figura 4. Ejemplo de prótesis eléctrica.
Las prótesis neumáticas son accionadas por aire comprimido que utilizan
actuadores por músculos neumáticos, proporcionan una gran cantidad de energía y son
capaces de presionar y de levantar grandes cargas con mucha precisión. Un músculo
neumático suele estar compuesto de un tubo interior de caucho cubierto por una capa de
fibras trenzadas en forma helicoidal. El mismo se cierra por los dos extremos, uno de ellos
era la entrada de aire y el otro el punto de conexión. El principio de funcionamiento es que
cuando en el tubo interior está el aire aumente la presión, el músculo se hincha y se
contrae. Estás prótesis tienen como defecto su peso que suele ser mayor que el de las
prótesis eléctricas. En la Figura 5 se muestra un ejemplo de una prótesis neumática.

9
Figura 5. Ejemplo de prótesis neumática
Debido a las desventajas existentes tanto en las prótesis eléctricas como neumáticas
el 70% de las personas con las manos amputadas prefieren no utilizar ninguna solución o
colocarse manos estéticas (no funcionales) o simplemente ganchos pasivos (5).
Hoy en día existen muchos desarrollos abiertos de prótesis de mano fabricadas a
partir de técnicas 3D. Estos tipos de desarrollos suelen estar basados en la experiencia y en
la observación de los movimientos de dicha prótesis, es decir sistemas empíricos. En la
Figura 6 se muestra un ejemplo de un desarrollo abierto de una prótesis de una mano con
implementación de las técnicas 3D.
Figura 6. Ejemplo de un desarrollo abierto de una prótesis de mano realizada a
partir de técnicas de impresión 3D.
Para el proyecto se toman como punto de partida diferentes modelos de este tipo y
desarrollar una simulación de los movimientos de la mano para luego obtener una prótesis

10
predecible. De esta forma se pretende desarrollar un modelo optimizado para poder obtener
una prótesis funcional.
1.2. Objetivos de la tesis
El trabajo presente tiene como principal objetivo diseñar, parametrizar y construir
una prótesis de mano fabricada a través de técnicas de impresión 3D. La flexión de la
misma será llevada a cabo a través de servoactuadores. El diseño de la prótesis tomará
como referencia para diversos parámetros las dimensiones de una mano humana, es decir
que será bioinspirada.
Tiene como objetivo, además, obtener y validar un modelo simulado que permita
predecir el movimiento de la prótesis.
Para lograr los objetivos planteados anteriormente se debe estudiar el mecanismo
de una mano tanto para la apertura como cierre de los dedos. Se debe diseñar y simplificar
el mecanismo utilizando elementos convencionales. Luego seleccionar los actuadores a
utilizar y familiarizarse con la programación de placas comerciales. Mientras tanto se tiene
que adquirir conceptos y experimentar con las técnicas de impresión 3D. Se debe modelar
las partes del mecanismo y de la estructura soporte del conjunto para ser compatible con
dichas técnicas. Fabricar las partes modeladas. Y finalmente ensamblar el mecanismo
completo, e integrar los actuadores y la placa de adquisición, y finalmente realizar ensayos
en el prototipo.

11
2. Principio de funcionamiento y modelado
En el presente capítulo se detalla la estructura de la mano para entender el
funcionamiento de la misma. Se obtiene una simplificación de los tendones y músculos
para lograr algunos de los movimientos principales de la mano. A partir de dicha
simplificación se seleccionan los mecanismos de actuación del prototipo y se arma el
modelo del mismo.
2.1. Estructura de mano
Para hacer una prótesis de una mano es de fundamental importancia entender como
naturalmente funciona la misma. La mano como órgano del cuerpo humano es sumamente
compleja, permite realizar múltiples movimientos y es un miembro sensitivo, dado que
brinda información del medio como la temperatura, tacto y dolor. Está compuesta por más
de 27 huesos y de 40 músculos, con lo cual posee más de 20 grados de libertad. Existen
músculos encargados del desplazamiento de la mano y otros que se encargan de limitar
dichos movimientos. Es muy difícil definir donde empieza y termina cada músculo y
tendón ya que se encuentra de forma intrincada y se confunden.
Por todo lo nombrado anteriormente es necesario acotar, poner un alcance a lo que
se busca suplantar con la prótesis diseñada. No se buscará proveer de la parte sensitiva del
miembro. Se busca brindar la posibilidad de realizar los movimientos más utilizados o
esenciales. En la Figura 7 se muestran dichos movimientos, el cilíndrico (A), de punta (B),
de gancho (C), palmar (D), esférico (E) y lateral (F) (5).

12
Figura 7. Movimientos principales de la mano. Cilíndrico (A), de punta (B), de
gancho (C), palmar (D), esférico (E) y lateral (F).
Para realizar los movimientos actúan diversos músculos y tendones. Los principales
que permiten mover al pulgar son los siguientes (6) (7) (8) :
Abductor corto del pulgar
Es un músculo plano que va del carpo a la falange proximal del pulgar como se
muestra en la Figura 8 izquierda. El movimiento principal que permite, junto con el
abductor largo del pulgar que se encuentra en el antebrazo, es la abducción del pulgar, está
definida como el movimiento perpendicular a la palma de la mano, como se muestra en la
Figura 8 derecha. El rango usual de movimiento es de 70° aproximadamente.

13
Figura 8. Izquierda, abductor corto del pulgar. Derecha, movimiento que permite
los abductores del pulgar.
Flector corto del pulgar
Es un músculo pequeño que tiene dos capas, una superficial que se encuentra hacia
el medial del abductor corto del pulgar y otra profunda que se encuentra por debajo del
mismo, como muestra la Figura 9 izquierda. Es el encargado, junto con el flector largo, de
flexionar el pulgar por delante y al ras de la palma, como se muestra en la Figura 9
derecha. El rango de movimiento es normalmente de 50°.
Figura 9.Izquierda, flector corto del pulgar. Derecha, movimiento que permite los
flectores del pulgar.
Oponente del pulgar

14
Es un músculo pequeño y cuadrangular que está en un plano más profundo que el
abductor corto del pulgar, que la capa superficial del flector corto del pulgar y lateral a la
capa más profunda del flector corto del pulgar, se encuentra ilustrado en la Figura 10
izquierda. Es el encargado de realizar la oposición del pulgar, que consiste en una
combinación de acciones que permiten que la punta del pulgar toque el centro de la palma
de la mano y la yema de los dedos, se muesta el movimiento en la Figura 10 derecha.
Figura 10. Izquierda, oponente del pulgar. Derecha, movimiento que permite dicho
músculo.
Extensor corto y largo del pulgar
El extensor corto del pulgar es el músculo que se encuentra situado debajo del
extensor común en el dorso del antebrazo y se conecta con el músculo abductor largo del
pulgar, se ilustra en la Figura 11 izquierda. El extensor largo del pulgar es un músculo
fusiforme situado en el plano profundo de la región posterior del antebrazo, inferior y
medial al músculo extensor corto del pulgar, se muestra en la Figura 11 derecha. Entre
ambos músculos permiten extender el pulgar, es decir el movimiento opuesto al de los
flectores.

15
Figura 11. Izquierda, extensor corto del pulgar. Derecha, extensor largo del
pulgar.
Los dedos restantes tienen un movimiento más limitado que el pulgar y por
consecuencia menor cantidad de músculos y tendones para realizar los movimientos
principales. Los principales son los siguientes:
Interóseos dorsales:
Se encuentran en ambos lados de los dedos, con excepción del meñique que se
encuentra en el lado interno únicamente, como se muestra en la Figura 12 izquierda. La
función principal de los músculos es poder separar los dedos entre sí en el plano de la
palma, como se muestra en la Figura 12 derecha. Suelen tener un rango de hasta 30°.
Figura 12. Izquierda, interóseos dorsales. Derecha, movimiento que permiten
dichos músculos.

16
Flectores
Al igual que en el pulgar existen dos tipos de músculos flectores, el corto y el largo,
los mismos se muestran en la Figura 13 izquierda. Los flectores largos o profundos se
encuentran principalmente en el antebrazo. Son los encargados de flexionar los dedos en el
plano perpendicular de la palma como se muestra en el Figura 13 derecha. El rango es
usualmente de 90°.
Figura 13 . Izquierda, músculos flectores. Derecha, movimiento que permite dicho
músculo.
Músculos extensores comunes:
Los músculos extensores se componen de un músculo extensor largo y uno corto
por dedo que en el antebrazo se entrecruzan y juntan, como se muestra en la Figura 14. Son
los encargados de extender los dedos, es decir el movimiento opuesto a los flectores.

17
Figura 14. Músculos extensores.
2.2. Simplificaciones para el modelado
Para poder realizar, con la prótesis, todos los movimientos que realiza la mano
necesitaríamos más de 20 actuadores ya que la mano posee más de 20 grados de libertad.
Si bien todos los grados libres son importantes para las diferentes actividades, los
movimientos principales son el de flexión y extensión para los primeros cuatros dedos y
para el pulgar además la función de oponer. Como se vio, para poder barrer todo el plano
perpendicular a la palma, los dedos poseen dos músculos tanto para la flexión y dos para la
extensión.
2.3. Selección del mecanismo de flexión
En una primera instancia se decidió evaluar el principio de funcionamiento de los
primeros cuatro dedos. Existen diversas formas de solucionar mecánicamente el
movimiento de falanges acopladas entre sí para poder barrer un recorrido perpendicular a
la palma de la mano, tanto para flexionarla como para extenderla. Se pensó en un sistema
que tenga péndulos acoplados por falange, como muestra la Figura 15. Además que tenga
una o más cuerdas por tendón para poder flexionar el mismo.

18
Figura 15. Principio de funcionamiento de la simplificación del modelo para los
cuatros primeros dedos.
Como limitación del proyecto se decidió evaluar los siguientes parámetros para la
flexión de los dedos:
Dos o tres falanges: si bien cada uno de los cuatro primeros dedos tiene tres
falanges muchos de los movimientos se puede realizar simplemente con el movimiento de
dos falanges. Una ventaja que posee utilizar dos falanges en vez de tres es que es más
sencillo resolver el sistema de dos péndulos acoplados que de tres. Además posee la
ventaja de introducir menos parámetros desconocidos al modelo ya que tiene una
articulación menos, en donde además hay rozamiento. Las desventajas que posee es que
aleja a la de una mano real y limita los movimientos de agarre como el esférico.
Uno o dos actuadores: tener dos actuadores por dedo implica poder desplazarlo a
cualquier punto del plano dentro de un área determinada, como es realmente el dedo. Tener
un actuador por dedo implica la mitad de actuadores, pero limitar el movimiento a un
recorrido fijo dentro del plano.
Con estas posibilidades se seleccionó trabajar con un dedo de dos falanges y con un
actuador por dedo, por lo menos para los cuatro primeros. Es decir que se seleccionó un
tendón equivalente a los dos tendones de flexión y que su recorrido será un recorrido fijo
dentro del plano perpendicular a la palma.

19
Para el movimiento de flexión se optó un sistema que permita conocer en todo
momento donde se encuentra la punta del dedo y el recorrido que realizó para llegar a
dicha posición, lo cual no es estrictamente necesario para el movimiento de la extensión.
Esto se debe a que se pensó en un sistema que tenga los dedos posicionados de forma
vertical inicialmente, y además que esta sea su posición cuando se encuentran relajados.
Para poder ir a una posición fija parte de esta posición y luego cuando termina el
movimiento vuelve a la misma.
2.4. Selección del mecanismo de extensión
Existen diversas formas de resolver el sistema de extensión de los dedos de forma
mecánica. Como limitación del proyecto se procedió a evaluar y comparar los siguientes
principios de funcionamiento:
Utilizar un elastómero como tendón extensor
Diversos modelos libres de prótesis utilizan elastómeros como tendón extensor de
la prótesis, como se muestra en la Figura 16. La ventaja que tiene dicho modelo es que es
muy económico realizarlo ya que existe un elastómero, Flex de Impresión, que se puede
utilizar en una impresora 3D. Además posee una gran facilidad de construcción y es
similar a un tendón real por el principio de funcionamiento del mismo, que al deformarse
realiza esfuerzo para volver a su posición original. La desventaja es la dificultad en la
predictibilidad de la deformación y esfuerzo que realiza, ya que los elastómeros no tienen
curvas lineales. Así como también suelen presentar una relajación de las tensiones con el
paso del tiempo.

20
Figura 16. Principio de funcionamiento al utilizar un elastómero como tendón
extensor.
Resorte como tendón extensor
El principio de funcionamiento que utiliza resortes como tendón extensor de
muestra en la Figura 17. Los resortes por lo general tienen una gran predictibilidad en la
posición y esfuerzo que realiza. Son económicos y fáciles de conseguir y son fácilmente
reproducibles porque hay modelos estándar.
Figura 17. Principio de funcionamiento al utilizar resortes como tendón extensor.
Tendón diferencial

21
Existe la posibilidad de compartir el actuador con la flexión como muestra la
Figura 18. El diseño del mismo es complejo relacionado con los mecanismos anteriores
pero posee la ventaja que no requiere materiales extra.
Figura 18. Principio de funcionamiento al utilizar un mecanismo diferencial.
Actuadores como tendón extensor
Para poder extender los dedos es posible colocar actuadores, como se muestra en la
Figura 19. Ya sea uno para otorgarle un recorrido fijo o con dos para poder barrer
un área, con ciertas combinaciones de movimiento.
Figura 19. Principio de funcionamiento al utilizar un actuador como principio de
extensión.

22
Para facilitar la selección de mecanismo con las diversas posibilidades
seleccionadas se armó la matriz de preselección sin pesos ponderados que se encuentra en
la Tabla 1.
Tabla 1. Matriz de preselección para la extensión de los dedos.
Elastómero Resorte Diferencial 1 actuador 2 actuadores
Facilidad de fabricación + + 0 - -
Facilidad del modelado - + 0 + +
Materiales 0 - 0 - -
Grados de libertad permitidos 0 0 0 0 +
Complejidad de diseño + + 0 0 -
Cantidad de actuadores 0 0 0 - -
Similitud con un dedo real + 0 0 0 0
Total 2 2 0 -2 -2
A partir de la matriz de la Tabla 1 se tomaron como mejores opciones para la
extensión de los la colocación de algún elastómero o de resortes.
Ensayo del elastómero
Se seleccionó Flex de impresión como elastómero debido a su compatibilidad con
las técnicas de fabricación en el proyecto. Como se desconocía en detalle el
comportamiento del polímero de procedió a realizar la probeta que muestra en el Plano 1
dentro del Anexo 2 con Flex de impresión.
Para simplificación del modelo lo que se espera es que el comportamiento se pueda
simular para diferentes velocidades de una misma forma. Aún si las variaciones de las
propiedades a diferentes velocidades no son significativas, es decir un error menor de 10%,
se considera aceptable para modelo.
Se realizó un ensayo a tracción, los resultados de las mediciones se muestran en la
Figura 20. Ensayo de tracción a diferentes velocidades de una probeta de flex imprimible.

23
Figura 20. Ensayo de tracción a diferentes velocidades de una probeta de flex
imprimible.
Se espera trabajar a una velocidad de deformación de 130 mm/mint y una
deformación de 0 a 0,9. Se puede ver que en un principio no serían significativas las
variaciones en el comportamiento a diferentes velocidades de deformación.
Una propiedad importante a tener en cuenta tratándose de un polímero es la
relajación que muestra. Si la tensión necesaria para mantener una deformación, que se
espera de trabajo, se mantiene constate después de un par de segundos el resultado es
aceptables. Así también si la caída de tensión nombrada no es significativa, es decir menor
a un 10%.
Se fijó la probeta en una deformación de 1.2 y se midió la tensión necesaria para
mantener dicha deformación en función del tiempo. Los resultados se muestran en la
Figura 21. En donde se va que la tensión cae de 5.2 MPa a 4.2 MPa en 45 segundos.

24
Figura 21. Relajación de la probeta de Flex a una deformación de 1,2.
La relajación es significativa en dicho tiempo. Esto implica que si se toma como
tendón extensor habría que involucrar una nueva variable que es el tiempo. Esto haría el
modelo más complejo por lo que el Flex de impresión queda descartado y se opta a los
resortes como mecanismo de extensión para los dedos.
2.5. Modelo resultante
Para el modelo finalmente se consideraron dos barras acopladas por medio de una
junta rotacional, representando cada una a una falange. Las mismas se encuentran
acopladas por una junta de primer orden, también rotacional, a una barra que representa la
mano. En cada junta se representa el esfuerzo del resorte como un momento angular, el
mismo es proporcional al desplazamiento angular de la articulación a partir de su posición
de relajación vertical. Se considera un modelo estático. No se tiene en cuenta el roce en las
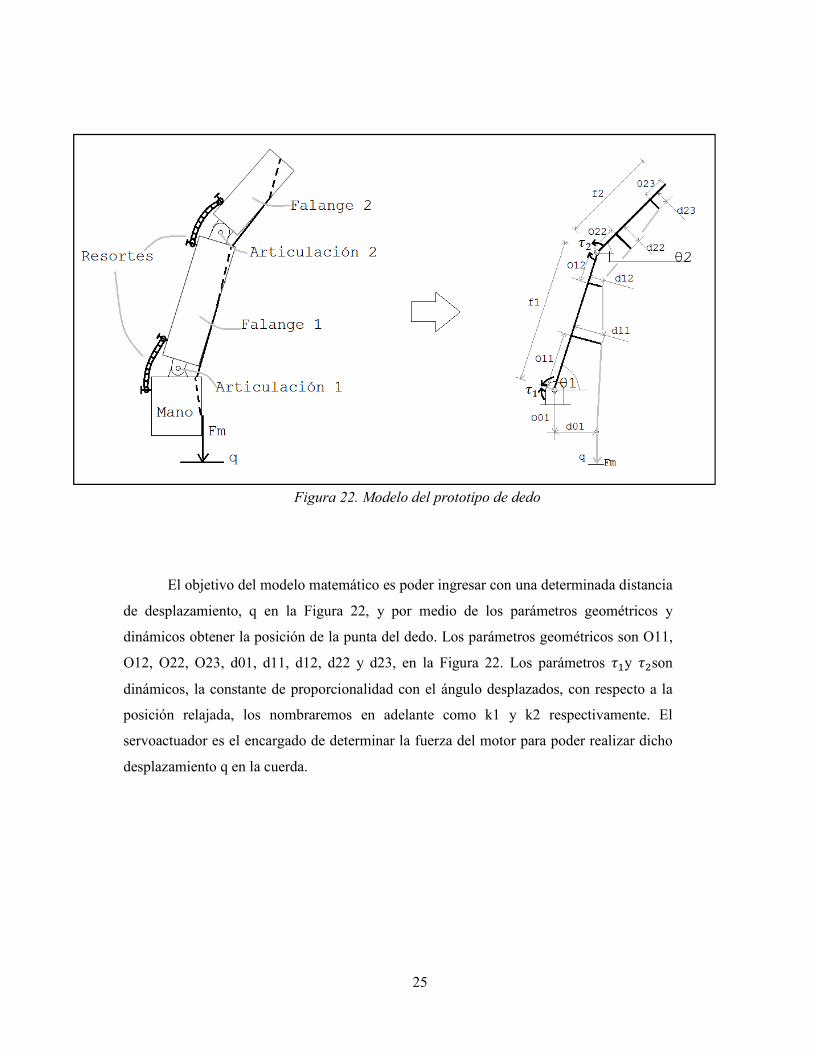
articulaciones. Se desprecia el peso de los elementos involucrados. En Figura 22 se
muestra el esquema conceptual del prototipo y el modelo con las variables matemáticas
involucradas.
25
El objetivo del modelo matemático es poder ingresar con una determinada distancia
de desplazamiento, q en la Figura 22, y por medio de los parámetros geométricos y
dinámicos obtener la posición de la punta del dedo. Los parámetros geométricos son O11,
O12, O22, O23, d01, d11, d12, d22 y d23, en la Figura 22. Los parámetros ��y ��son
dinámicos, la constante de proporcionalidad con el ángulo desplazados, con respecto a la
posición relajada, los nombraremos en adelante como k1 y k2 respectivamente. El
servoactuador es el encargado de determinar la fuerza del motor para poder realizar dicho
desplazamiento q en la cuerda.
Figura 22. Modelo del prototipo de dedo

26
2.6. Conclusión
En el capítulo se estudió el mecanismo de funcionamiento de una mano real. Se
detallaron los movimientos principales de la mano, y los tendones y músculos principales
que realizan dicho movimiento. Para los primeros cuatro dedos los mecanismos de flexión
y extensión son los más relevantes. Para poder realizar los movimientos cada mecanismo
involucra a dos tendones, lo que les permite barrer un plano. Para el modelo se tomó un
tendón equivalente para la flexión. Para la extensión se estudiaron varios mecanismos de
los cuales se seleccionaron dos, utilizar un elastómero como tendón extensor o de lo
contrario resortes. Se estudió el comportamiento mecánico a diferentes velocidades de
deformación en un ensayo de tracción, en el cual se consideraron despreciables los
cambios en las propiedades. Se realizó, además un ensayo de relajación de la probeta de
Flex y se vio que para mantener una deformación fija la tensión aplicada disminuye con el
tiempo. Ante este efecto del polímero se optó por usar resortes en la parte trasera de los
dedos, que en su posición de reposo mantienen al dedo extendido. Con el mecanismo de
flexión y extensión seleccionado se procedió a armar el modelo del prototipo.

27
3. Diseño y fabricación de los prototipos de los dedos
A la hora de plantear el diseño del prototipo de un dedo resulta que existen diversas
variables libres. La bibliografía (9) explica la importancia de mantener el antropomorfismo
de la mano. Es decir conservar lo más que se pueda la similitud con una mano real, tanto
en la escala como en la naturalidad de los movimientos. En la Figura 22 se considera el
largo de ambas falanges f1 y f2 conocidas. Para la primera falange se considera el largo de
la primera falange del dedo índice de la autora. Para la segunda falange, se adopta como
largo el de las dos últimas falanges del dedo índice de la autora.
3.1. Prototipo funcional
Se realizó un primer prototipo funcional para poder visualizar el mecanismo de
cierre del dedo. Como tendón se utiliza una tanza. Se le colocaron poleas móviles que
sujetan al tendón para visualizar el efecto del desplazamiento de las mismas y el esfuerzo
en las articulaciones. Ante una misma fuerza se busca el mayor torque posible en las
articulaciones.
3.1.1. Diseño
Para poder diseñar el prototipo hubo una etapa de aprendizaje de un software CAD
y familiarización con técnicas de impresión 3D, ya que las mismas imponen ciertas
limitaciones las posibilidades de diseño.
El diseño de muestra en la Figura 23. Cuenta con dos falanges que se unen con una
junta rotacional fijada con un perno. Se ubican tres poleas por donde cruza y sujeta la
tanza. Para colocar dichas poleas se introducen por la parte inferior y luego se giran 90°.
La parte inferior de las poleas es de forma cilíndrica y se sujetan por presión en las
falanges. Para más detalles se pueden visualizar los planos en el Anexo 3.

28
Figura 23. Diseño del primer prototipo funcional
3.1.2. Resultados
Se fabricó el diseño con el polímero PLA para impresión, con un filamento de
0.2mm de espesor, se muestra el resultado en la Figura 24.
Figura 24. Primer prototipo funcional impreso
A partir resultado se conoció el ajuste que se tiene que tener en cuenta al hacer
agujeros en forma vertical por el principio utilizado de impresión 3D. Es importante tener

29
en cuenta la dirección en la cual se imprime la pieza. De la misma forma pudo
determinarse el ajuste en bordes verticales y horizontales. Un efecto indeseado que se
obtuvo al desconocer estos ajustes fue que las poleas podían pivotar alrededor del eje de su
cilindro base una vez montadas en las falanges.
Como conclusión del primer prototipo se obtiene que la polea 1, de la Figura 23,
deba estar lo más alejada de la articulación entre falanges para maximizar el torque en la
misma ante una misma fuerza. Así como la articulación 3 debe estar lo más alejada de la
articulación entre el dedo y la palma. Es decir en la Figura 22 O22 y O11 deben ser
máximas, con lo que O12 y O23 deben ser mínimas.
3.2. Segundo prototipo con altura de tendón variable
Se diseñó un segundo prototipo para poder visualizar otras distancias a maximizar y
minimizar en la sujeción de los tendones. A diferencia del primer prototipo el segundo
permite variar la altura a la cual se sujeta el tendón en cada una de las poleas, además de
poder variarse la posición en la falange.
3.2.1. Diseño
Las poleas no pueden pivotar con respecto al punto de agarre como la hacían antes,
esto se debe a que la forma del alojamiento en la falange impide tal movimiento. La polea
no tiene una sección cilíndrica en la parte superior sino que es ovalada, como se muestra la
Figura 25. Para colocar la polea se debe girar la misma, como en el primer prototipo, solo
que en lugares específicos predeterminados.

30
Figura 25. Detalle en la polea de sujeción.
Si bien en el prototipo final es muy importante mantener las dimensiones
antropomórficas (9), en esta instancia el foco está en comprender el funcionamiento, por lo
que sólo es relevante la longitud de la falange. En el diseño se respetan entonces las
proporciones de las longitudes de las falanges, aún cuando la escala del mismo es del doble
de las medidas de referencia. Para más detalles se pueden visualizar los planos en el Anexo
4.
3.2.2. Resultados
Se fabricó el prototipo con el polímero PLA para impresión, con una fibra de 0.2mm, el resultado se ilustra en la Figura 27.
Figura 26. Diseño del prototipo con altura de tendón variable.

31
Figura 27. Segundo prototipo, con altura de tendón variable.
Como conclusión del primer y segundo prototipo se obtiene que se deben
maximizar ���, ���, ��� � ��� y se deben minimizar las distancias ���, ���,
���, ���, ��� � ���, haciendo alusión a la notación usada en la Figura 22, como se muestra
en Figura 28 en donde se muestran en naranja las distancias a maximizar y en verde las
distancias a minimizar. Con dichas distancias maximizadas y minimizadas se maximiza el
torque producido en las articulaciones.
Figura 28. Variables a maximizar (naranja) y variables a minimizar (verde).
3.3. Prototipo final
Para el tercer y último prototipo se busca implementar las distancias óptimas. Se
respeta el antropomorfismo del dedo. Se implementó además el sistema de extensión por
resortes.

32
3.3.1. Diseño
El prototipo ya no presenta poleas móviles sino que se sujeta el tendón por medio
de la falange, con agujeros fijos a través de la misma. Las distancias máximas y mínimas,
concluidas a partir de los prototipos anteriores, se tomaron teniendo en cuenta las
limitaciones de la forma de un dedo real. Las alturas máximas, ��� y ���, se tomaron como
el máximo espesor del dedo real de referencia. Las distancias mínimas a lo largo y alto del
dedo, ���, ���, ���, ���, ��� y ���, se tomaron teniendo en cuenta la resistencia estructural
por las técnicas de impresión, es decir no se puede imprimir algo muy angosto por la
debilidad que presentaría la estructura, se pueden visualizar dichas distancias en la Figura
30. Diseño del prototipo final. Se usaron resortes de tracción comerciales y se colocaron
los mismos con una precarga inicialmente aleatoria. Los resortes se sujetan con dos
tornillos, uno en cada extremo. Se dispuso un canal redondo para guiar al resorte. Se
redondeó el canal hacia el final de la falange para que el resorte tenga una transición suave
al alargarse y obtener una mejor relación de tracción respecto a la flexión. Se le colocaron
trabas mecánicas en las articulaciones, incluidas en la forma de la falange, para que la
misma no pueda girar hacia atrás. Así también se consigue que el rango de movimiento sea
de 90°. Para mayor comprensión se muestra los detalles del prototipo en la Figura 29.
Figura 29. Detalles del prototipo final.

33
Se diseño una pieza como palma, la cual sólo cumple con la función de sostener al dedo. El
diseño final de muestra en la Figura 30. Para más detalles se pueden visualizar los planos
en el Anexo 5.
Figura 30. Diseño del prototipo final.
3.3.2. Resultados
Se fabricó el diseño con el polímero PLA para impresión, con un filamento de 0.2
mm de espesor, se muestra el resultado en la Figura 31.
Figura 31. Prototipo final.
3.4. Conclusiones
Se diseñaron y fabricaron tres prototipos. A partir del primer prototipo funcional
impreso se concluyó a qué distancia se debía sujetar el tendón en cada falange para obtener
un torque máximo. Se identificó además el ajuste que había que considerar para la
impresión en 3D de las piezas, el cual depende de la dirección de impresión.

34
El segundo prototipo permitía variar la altura a la cual se sujeta el tendón. A partir
del mismo se seleccionaron las alturas óptimas para obtener un máximo torque en las
articulaciones. Se diseñaron las poleas para que no puedan pivotar con respecto a su punto
de sujeción, tal y como había sucedido con el primer prototipo.
El tercer y último prototipo no posee poleas para sujetar el pivote variable. A partir
de las conclusiones obtenidas en los dos primeros prototipos, y las limitaciones en la forma
de un dedo, se fijaron las distancias y alturas relevantes. El prototipo cumple con el criterio
de antropomorfismo en una escala uno a uno con el dedo índice de la autora. Se colocó el
mecanismo de extensión. Se fijaron los resortes con dos tornillos cada uno, se les incluyó
un canal para guiar el movimiento y se redondeó el mismo para una transición suave, y
obtener una mejor relación entre la flexión y tracción que ejerce. Se colocaron trabas
mecánicas para limitar el movimiento relativo entre falanges en un rango de 90°. Por
último se diseñó una base simple a modo de palma.

35
4. Implementación y validación del modelo en un entorno simulado
Para poder resolver analíticamente la posición de la mano en función de la distancia
que se desplaza el tendón, � en la Figura 22, es necesario resolver el sistema de dos
péndulos acoplados. Para ello se podría utilizar la teoría de Newton o de Lagrange, lo
cierto es que cada vez que se quiera modificar un parámetro relevante del sistema habría
que volver a resolver el sistema de ecuaciones acopladas. Esto es un inconveniente puesto
que la modificación de parámetros es bastante usual durante el desarrollo. Además habría
que resolver el sistema para cada dedo en la prótesis de acuerdo a sus dimensiones, así
también si es que se quiere cambiar de persona.
Para evitar resolver el problema en múltiples ocasiones se optó por realizar un
entorno de simulación, en donde modificar un parámetro se haga de forma sencilla y se
pueda obtener una solución de forma inmediata.
4.1. Implementación del modelo en la simulación
Si bien es posible simular el movimiento de un resorte o el comportamiento de una
cuerda entre dos puntos, resulta más sencillo reemplazar el modelo por el mecanismo
equivalente de la Figura 32. Se reemplazan los resortes por un torque propio de la
articulación, despreciando los efectos de tracción que produce, el roce que se produce en
estos puntos se incluyen en conjunto con dicho torque. Cabe destacar que el sentido del
torque que produce el roce depende si el movimiento que realiza el dedo es de flexión o de
extensión. Se tomó como objeto de estudio el movimiento de flexión. Los torques �� y ��
se consideran proporcionales al ángulo según la forma �� �� , a la cual le suma una
constante relacionada con la precarga de los resortes, más un término asociado con el
amortiguamiento del movimiento, es decir un ����̇.
En el modelo de la Figura 32 se reemplazó el tendón por articulaciones prismáticas
o actuadores equivalentes, que se traccionan o comprimen según sea la fuerza que se les
determine. La fuerza con que se comprime cada articulación prismática, T1 y T2, debe ser
la misma ya que representa la tensión del tendón.

36
Figura 32. Modelo para la simulación.
Se colocaron también juntas de rotación en cada una de los extremos de T1 y T2
para que estas puedan pivotar a medida que el dedo se flexiona. Los actuadores se
encargan de unir dos objetos que no son tales, pues no poseen ni masa ni se puede fijar su
movimiento a algún otro objeto. La junta J1 une el movimiento de la palma con la primera
falange, la junta J2, relaciona el movimiento de la primer y segunda falange. Para poder
relacionar la palma con el tendón T1 a través de la junta J3 es necesario crear objetos
adicionales. No se puede relacionar un actuador con otro, J3 con T1 por ejemplo, por lo
que se creó en este ejemplo el objeto Ob3 en el lugar de J3. Es decir la palma se relaciona
con Ob3, por medio de J3, a su vez Ob3 se relaciona, además, con el objeto ficticio del otro
extremo del tendón Ob4, por medio del tendón T1. De esta forma se forman dos cadenas
cinemáticas cerradas, C1 y C2, acopladas entre sí. La cadena C1 está compuesta de la
palma, J1, la falange 1, J4, Ob4, T1, Ob3 y finalmente J3. La cadena 2 consta de J2, la
falange 2, J6, Ob6, T2, Ob5, T2, Ob5 y finalmente J5.
En la simulación las articulaciones prismáticas T1 y T2 traccionan con una fuerza
F, la cual se varía para obtener las diferentes posiciones de equilibrio. La coordenada
generalizada de movimiento, � en la Figura 22, en el modelo es la suma de la deformación
de T1 y T2. En la Figura 33 se muestra el modelo en el entorno de simulación.

37
Figura 33. Prototipo en el entorno de simulación.
4.2. Validación de la simulación
Para validar el modelo de la simulación es necesario conocer entonces variables
propias del diseño impreso y ensamblado; ��, ��, ��, ��, ��������� � ���������. Para
determinarlas es necesario contrastar con mediciones del comportamiento propio del dedo.
Lo que se hace es determinar cuál es el movimiento resultante para una determinada fuerza
en el tendón, para que luego con valores apropiados de las variables ajustadas no son
unívocos, se debe tener en cuenta que pueden no tratarse de valores reales para cada una.
4.2.1. Medición de la trayectoria del prototipo de dedo
Se filmó el movimiento del último prototipo, por medio de un programa de
generación de trayectoria automática se determinaron las posiciones cuadro a cuadro de
dos puntos característicos del dedo, la articulación y la punta. Al analizar el movimiento se
vio que no era continuo, sino que al principio se movía la segunda falange hasta un cierto

38
ángulo, luego la primera falange giraba los 90° y finalmente la segunda falange terminaba
el movimiento. Dicha forma de realizar el recorrido no era natural por lo que se optó por
cambiar la precarga de los resortes para lograr que el movimiento de las falanges sea
simultáneo.
Para hacer uso del programa de generación de trayectorias, se realizó una marca
característica en la punta del dedo, a 5 cm de J2. Con el prototipo fijo, se procedió a filmar
el movimiento de flexión del dedo.. El resultado se ve en la Figura 34, en donde en el eje x
se muestra el desplazamiento horizontal de la punta del dedo y en el eje y el
desplazamiento vertical del mismo. La curva muestra una incertidumbre de 0.6cm tanto en
ambos ejes, esto se debe a la precisión en el punto cuya trayectoria se sigue y a la
deformación proporcionada de la cámara.
Figura 34. Trayectoria del prototipo final, con un error de 0.6cm en x e y.
Al visualizar el movimiento del tendón se vio que el mismo se deformaba,
estirándose de forma significativa. Es por ello que se cambió el mismo por una tanza de
nylon que tiene una deformación despreciable.
Se diseñó e imprimió un banco de prueba para medir la fuerza necesaria para
conseguir los diferentes puntos de equilibrio. El banco poseía una pieza de agarre para fijar
el prototipo, una polea para que la tanza pueda deslizar y cambiar de dirección y un
canasto para colocarle los diferentes pesos. Además se utilizó una balanza para medir las

39
diferentes pesas. El diseño del banco de prueba e impreso se muestran en la Figura 35 a la
izquierda y derecha sucesivamente.
Figura 35. Banco de prueba, diseño a la izquierda e impreso a la derecha.
Al igual que antes se midió la posición x e y de la punta del dedo y de la
articulación J2 en función del peso que se colocaba en la canasta. El resultado se muestra
en la Figura 36, en el y se muestra la masa de los pesos utilizados y en el eje x el ángulo
que forma la primer falange con el piso, obtenidos a partir de las posiciones x e y medidas.
La incertidumbre del peso es despreciable frente a los 4° de error en el ángulo.
Figura 36. Fuerza necesaria para diferentes posiciones de equilibrio, con una
incertidumbre de 4° en el ángulo.

40
4.2.2. Contraste con la simulación
Con el programa CAD se creó un archivo URDF, formato de descripción de un
robot universal, para el diseño del prototipo. El mismo se exporta al entorno simulado en
donde se muestra con todos los actuadores correspondientes. Lo único que se debe realizar
es colocarle dummys, objetos de prueba, para poder cerrar las cadenas cinemáticas
correspondientes.
Se fueron modificaron los parámetros ��, ��, ��, ��, ��������� � ��������� hasta
obtener un resultado que se corresponda con el medido. Los valores de �� y �� se tomaron
como iguales. La precarga entre la falange uno y dos, sobre J2, resultó despreciable. Los
valores de los parámetros se resumen en la Tabla 2. Los resultados se muestran en las
Figura 37 y Figura 38.
Tabla 2. Valores de los parámetros a partir del contraste con la simulación.
Parámetro Valor
Constante de resorte �� 0.25 �/���
Constante de resorte �� 0.25 �/���
Constante de amortiguación �� 0.04 ��/���
Constante de amortiguación �� 0.04 ��/���
Precarga del resorte ��������� 0.17�
Precarga del resorte ��������� 0

41
Figura 37. Contraste de la trayectoria del prototipo medido y el simulado.
Figura 38. Contraste de las posiciones de equilibrio en función de la fuerza
realizada en el prototipo medido y simulado.

42
4.3. Conclusión
Se creó un entorno de simulación en donde se puede cambiar los parámetros
relevantes del problema de forma sencilla y obtener los resultados del movimiento de
forma inmediata. Para ellos se hicieron un par de cambios en el modelo para que sea más
sencillo simularlo, resolviendo de esta forma un problema equivalente. A través de dos
mediciones experimentales, de posición y fuerza, se obtuvieron los valores de los
parámetros que hacen falta para que de la simulación se obtenga el mismo resultado que en
la realidad. Las coordenadas de posición simuladas en comparación con las reales no
presentan discrepancias significativas si se hace uso de los parámetros antes detallados en
la Tabla 2

43
5. Diseño de la mano
Una vez terminado el diseño, la fabricación y la simulación del prototipo de dedo
se procedió a diseñar la mano completa. La misma consta de una palma y los cuatro dedos
restantes. Es necesario aclarar que en esta etapa no se pretende realizar mediciones y
caracterizar los parámetros para cada dedo. Es propio de etapas mas avanzadas someter a
todo el mecanismo a una validación como la antes descripta.
5.1. Diseño de los dedos restantes
Para el diseño del dedo meñique, anular y mayor se utilizó el mismo modelo que el
dedo índice de prototipo sólo que ajustado con las medidas correspondientes. Cabe aclarar
nuevamente que las medidas utilizadas fueron la de los dedos de la autora. Se mantuvo la
longitud de los resortes para tener la misma precarga en cada uno. Por falta de lugar, en el
dedo meñique ambos resortes comparten un orificio. El diseño final de los tres dedos se
muestra en la Figura 39. Para más detalles se pueden visualizar los planos en el Anexo 6.
Figura 39. Diseño del dedo meñique, anular y mayor.

44
5.1.1. Diseño del pulgar
Para el pulgar se diseñó un mecanismo capaz de realizar dos tipos de movimientos
rotacionales en conjunto, de oposición y de flexión. En un principio se pueden colocar dos
actuadores para el pulgar y obtener los dos tipos de movimiento de forma independiente.
Por simplicidad en el accionamiento se optó por el movimiento combinado.
El pulgar consta de tres partes, las dos falanges que permiten la flexión y una pieza
que permite la unión entre el pulgar y la palma mediante una junta rotacional, como se
muestra en la Figura 40.
Figura 40. Diseño del pulgar
Las dimensiones de la falange 1 y 2 cumplen con las medidas antropomórficas,
simplemente se cambian las dimensiones de largo y ancho del prototipo del dedo índice.
Para la extensión del movimiento de oposición se utiliza un resorte como en los otros
casos. La precarga de dicho resorte no fue determinada. Para más detalles ver el Anexo 6.

45
5.2. Diseño de la palma
La palma es la encargada de vincular los cinco dedos. En este caso además debe
poseer un sistema para ordenar los tendones provenientes de cada uno. Nuevamente las
dimensiones se basan en las de la autora y tiene dos partes, una base y una tapa. Posee los
orificios y canales correspondientes para cada resorte. La base posee 4 agujeros, en la
Figura 41 señalados con números, para sujetar la tapa a la base. Se tienen fijaciones en la
parte inferior para fijar la mano a un banco de comandos. Se muestra el diseño final de la
palma en la Figura 41.
En la Figura 42 se muestra y enumeran los orificios que sirven como canales para
cada tendón. De acuerdo a la misma figura, la letra de cada orificio hace referencia a un
mismo tendón que pasa por ellos. El objetivo de los canales es que los tendones no se
crucen entre sí y tengan una salida ordenada al banco de comando. Para más detalle los
planos se encuentran en el Anexo 6.
Figura 41. Diseño de la palma

46
Figura 42. Detalle de los canales de los tendones
5.3. Ensamble
Una vez diseñados los cinco dedos y la palma se procedió a ensamblar el conjunto.
El diseño final de la mano sus principales componentes se muestra en la Figura 43.
Figura 43. Diseño final de la mano

47
5.4. Conclusiones
Se diseñó el dedo meñique, anular y mayor. Los mismos poseen el diseño del dedo
índice del prototipo final, con las medidas de ancho y largo de cada dedo correspondiente a
la autora. Los valores que se usaron para precargar los resortes fueron los mismos que se
usaron en el dedo índice.
Se diseñó el dedo pulgar para que el mismo pueda realizar movimientos de flexión
y oposición. Posee mecanismos independientes para cada movimiento, pero con un mismo
tendón y un actuador se obtiene el movimiento combinado. Las dos falanges del pulgar se
diseñaron con el criterio de antropomorfismo de los otros dedos. Para extender el pulgar y
volver a la posición de reposo se utilizan en total tres resortes.
Se diseñó la palma de la mano. La misma tiene dos funciones principales, sujetar
los cinco dedos y ordenar los tendones de la mano, es decir, que facilita el camino de los
tendones hacia el banco de actuadores de forma ordenada. La palma posee además una
tapa para que no queden expuestos los tendones y otros elementos internos. Por último se
tuvieron en cuenta una serie de orificios que permiten fijar el conjunto ensamblado al
banco de comandos.

48
6. Fabricación, automatización y ensayos
Ya finalizado el diseño del conjunto se procedió a fabricar la mano completa, lo
que implica la impresión 3D de los dedos y palma, colocar los pernos, tornillos y resortes y
ubicar los tendones de cada dedo. Para la automatización se diseñó y confeccionó un banco
de comandos en donde se ubican los servomotores de cada dedo, y en donde además se fija
la palma. El control de los servomotores se realiza mediante una placa Arduino, la cual
puede programarse desde una computadora. Se realizaron ensayos para comprobar el
correcto funcionamiento de los mismos.
6.1. Fabricación
Los diseños descriptos en el capítulo anterior se fabricaron con las técnicas de
impresión 3D. Se pulieron los ejes por donde pasan los pernos y los canales por donde
deslizan los resortes para minimizar el roce en las articulaciones.
6.1.1. Impresión y ensamble de los dedos
Se fabricaron el dedo meñique, anular, mayor y nuevamente el índice. El resultado
dedos se muestra en la Figura 44.
Figura 44. Prototipos finales del meñique, índice, mayor y anular.

49
6.1.2. Impresión y ensamble del pulgar
De la misma froma, se imprimieron y ensamblaron las tres partes que constituyen el
dedo pulgar. El resultado se muestra en la Figura 45.
Figura 45. Prototipo final del pulgar
6.1.3. Impresión y ensamble de los dedos en la palma
Una vez impreso los dedos se procedió a fabricar la palma. Las dos partes que la
componen se muestran en la Figura 46.
Figura 46. Palma de la mano

50
Cuando se tuvo cada una de las partes se procedió a ensamblarlas por medio de
resortes, pernos y tendones correspondientes. El resultado se muestra en la Figura 47.
Figura 47. Prototipo final de la mano.
6.2. Automatización
Micro servo
Se optó por utilizar un Micro servo SG90, para cada uno de los cinco dedos. Cada
Micro servo posee tres entradas, una correspondiente a la alimentación de 5V, una a tierra
y la tercer entrada corresponde a la señal de un PWM. La señal debe ser como la que se
muestra en la Figura 48, con un período de 20 ms, en el cual la señal de alto de 5V debe
tener una duración de 1 a 2 ms. Al variar el alto se 1 a 2 ms lo que se cambia es la posición
del motor entre 0° y 180°. Los servos poseen un torque máximo de 1.8 kgf.cm.

51
Figura 48. Señal PWM para cada Micro servo.
Banco de prueba
Una vez seleccionados los micro servos se construyó un banco de prueba que
permitiera fijarlos en conjunto con la mano, manteniendo los tendones ordenados. Se
construyó para que el mismo tenga 6 motores dejando abierta la posibilidad para que un
futuro el pulgar tenga dos tendones independientes. Se construyeron además poleas para
fijar los tendones a los motores, las mismas fueron diseñadas para optimizar la fuerza que
pueda obtener desde el motor. La mitad del perímetro de cada polea coincide con el
desplazamiento total de cada tendón para cada dedo. El diseño final del banco de comando
y una de las poleas, la correspondiente al dedo índice, se muestran en la Figura 49.
Figura 49. Banco de comando y polea índice.

52
Una vez impreso el diseño final se colocaron los servomotores, a cada uno se le fijó
la polea y se tensaron y sujetaron los tendones. Cabe mencionar que en cada polea se dejó
un orifico en la periferia de forma tal que sirva como punto de sujeción del tendón
correspondiente
Conexión con Arduino
Se conectó la entrada PWM de cada servomotor al controlador Arduino. Se
alimentó la placa y los motores con una fuente de 5V. Se conectó el puerto serie del
Arduino, por medio de un conversor incorporado, a la entrada USB de la computadora. Se
programó el Arduino para que pueda llevar a cada motor hacia una posición deseada en
términos de rotación, en donde 0° es la mano extendida y 180° es el dedo completamente
cerrado. El programa se encuentra en el Anexo 6. En la Figura 50 se encuentra el prototipo
final de la mano conectado al banco de prueba, con el Arduino incorporado.
Figura 50. Prototipo final de mano y banco de comando con Arduino incorporado.

53
6.3. Ensayos
Se comprobó el correcto funcionamiento de cada uno de los dedos es decir, que se
obtenga un movimiento controlado. El movimiento del pulgar no se llegó a completar del
todo, ya que el torque que realiza el servomotor no es suficiente. El pulgar a diferencia de
los demás dedos posee 3 resortes que se oponen al movimiento, que además por sus
características geométricas y su posición resulta en que el brazo de palanca es menor por lo
que se requiere una fuerza mayor.
6.4. Conclusiones
Se fabricaron los diseños descriptos en el capitulo anterior. Se ensamblaron las
piezas y se pulieron asperezas en los puntos de ensamblaje, para asegurar un movimiento
fluido del mecanismo. Se seleccionó un actuador para realizar el movimiento de cada dedo,
el Micro servo SG90. Se construyó un banco de pruebas para fijar los motores, el prototipo
de mano y mantener los tendones ordenados. También se fabricaron poleas cuyo perímetro
es el doble del desplazamiento de los tendones para cada dedo para poder aprovechar el
recorrido total del motor y al mismo tiempo obtener una buena fuerza. Por medio de una
placa Arduino se programó el movimiento de cada servomotor. En dicho programa se le
indica la posición a la cual debe dirigirse el motor, siendo 0° para la posición de relajación
y 180° para la posición de flexión. De esta forma se obtuvo un movimiento controlado.

54
7. Conclusiones
En el capítulo dos se estudió el mecanismo de funcionamiento de una mano. Se
estudiaron los movimientos principales de la mano y los tendones que permiten realizarlos.
Se concluyó que para el dedo meñique, anular, índice y mayor los movimientos principales
son la extensión y flexión, mientras que para el pulgar se agrega además el movimiento de
oposición. Cada movimiento implica más de un tendón. Sin embargo, se tomó un único
tendón equivalente para la flexión, mientras que la extensión se hizo de forma pasiva
mediante resortes. En pos de simplificar el modelo, se utilizaron dos falanges en lugar de
tres, ya que con esto se obtienen posiciones equivalentes.
Se diseñaron y fabricaron tres prototipos de dedo índice, para lo que se tuvo que
familiarizar con técnicas de impresión 3D y con un programa CAD. El primero permitía
variar la distancia horizontal de sujeción del tendón. El segundo permitía además variar la
distancia vertical de los mismos puntos. A partir de ellos se concluyeron que distancias
maximizar y minimizar para poder obtener el máximo torque en las articulaciones. El
tercer y último prototipo se diseñó y construyó teniendo en cuenta dichas conclusiones. Es
en este punto donde se agregó el mecanismo de extensión por resortes. Se colocaron
trabas mecánicas para limitar el movimiento tal y como lo es un dedo real. Se mantuvieron
las dimensiones antropomórficas en los tres prototipos, las cuales se basan en las medidas
de la mano de la autora.
Con el objetivo de simplificar la simulación, se modeló un mecanismo equivalente
que mantiene a grandes rasgos los parámetros involucrados. Se creó un entorno de
simulación en donde cambiar parámetros, sea algo sencillo. A través de mediciones
experimentales, de fuerza y posición, se obtuvieron los parámetros experimentales
restantes; constantes de resortes, amortiguación y precargas. Las coordenadas de posición
y fuerzas aplicadas para lograr un movimiento en contraste con la simulación no presentan
discrepancia significativa.
A partir del prototipo del índice se diseñaron y construyeron los dedos restantes con
sus dimensiones antropomórficas correspondientes. Al dedo pulgar se le agregó el
movimiento de oposición, para lo que se diseñó una pieza además de las falanges y se
utilizó nuevamente un resorte para la extensión. Se diseñó y construyo la palma de la
mano, la cual consta de dos partes: una base y una tapa. La función de la base es sujetar los

55
cinco dedos, ordenar los tendones hasta la salida al banco de comendo y servir como punto
de sujeción al mismo banco. La tapa sirve de protección para los elementos internos de la
mano como ser los tendones. Se ensamblaron entonces todas las piezas, obteniendo de esta
manera el mecanismo listo para ser actuado.
Se seleccionó el actuador que se utiliza en cada dedo, el cual posee tres entradas,
una alimentación, un tierra y una señal PWM. Cambiando el duty del PWM el servo gira su
eje hacia diferentes posiciones. Se construyó un banco de pruebas para sujetar a los
motores, ordenar los tendones y fijar a la mano. Se conectó cada señal de entrada de los
servos a una placa Arduino. Se programó la placa para que varíe el duty de cada señal y así
obtener el ángulo deseado, el cual implica en 0° posición de relajación y 180°flexión total.
Se obtuvo entonces un mecanismo de mano completamente funcional, el cual permite
variar de forma suave la posición de cada dedo.
Se recomienda para trabajos futuros simular y obtener los parámetros corregidos
para cada dedo. En base a estos resultados es recomendable optimizar el diseño del
mecanismo para reducir los márgenes de error en el contraste con la simulación. Para el
dedo pulgar en particular, es necesario optimizar el movimiento, aplicar el o los
controladores adecuados, y por último conseguir un movimiento más natural. También se
podría estudiar la fuerza de prensa que realiza la mano en función de la fuerza que ejercen
los motores.

56
8. Anexo
8.1. Código para el movimiento de los servomotores

57
8.2. Plano de la probeta de Flex
El apéndice consta del plano PL-PM-01-R0

25
17 8
16,
12
R18
5
99,
2
3,4
A A
B B
C C
D D
E E
F F
4
4
3
3
2
2
1
1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO:
NOMBRE FIRMA FECHA
MATERIAL:
REVISIÓN
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
N.º DE DIBUJO
ESCALA: 1:1 HOJA 1 DE 1
A4Polímero PLA
PESO:
PL-PM-01-R0
Probeta de Flex de impresión
Tobías Quispe
TÍTULO:
M. Jimena López Morillo

8.3 Planos del primer prototipo
El presente Anexo posee los planos:
PL-PM-02-R0 – Prototipo funcional
PL-PM-03-R0 – Falange 1 Prototipo funcional
PL-PM-04-R0 – Falange 2 Prototipo funcional
59

1 24
3 3 3
4 1 Perno Acero3 3 Polea PLA PL-PM-042 1 Falange 2 PLA PL-PM-041 1 Falange 1 PLA PL-PM-03
Pos Cantidad Descripción Material Nota
A A
B B
C C
D D
E E
F F
4
4
3
3
2
2
1
1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO:
NOMBRE FIRMA FECHA
MATERIAL:
REVISIÓN
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
N.º DE DIBUJO
ESCALA:1:2 HOJA 1 DE 1
A4Polímero PLA
PESO:
PL-PM-02-R0
Prototipo funcional
M. Jimena López Morillo
TÍTULO:
Tobías Quispe

32
70
5
5
55
12
12 R7
,50
Vista frontal
2,7
11,
5 15
15
7,4
0
R2,70
5,90
10
6
6
10 6,50
A A
B B
C C
D D
E E
F F
4
4
3
3
2
2
1
1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO:
NOMBRE FIRMA FECHA
MATERIAL:
REVISIÓN
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
N.º DE DIBUJO
ESCALA:1:1 HOJA 1 DE 1
A4Polímero PLA
Plano base: PL-PM-02 (Pos 1)
PL-PM-03-R0
Falange 1 Prototipo funcional
M. Jimena López Morillo
TÍTULO:
Tobías Quispe

50
32
5 3
5
12
3 11
5
R7,50
1 7,4
R2,7 2,7
9
12
6 10
30
3,1
R6,8 R4
21,
5
2
1,4 R2,5
34,
8
3,4
Vista frontal
Vista frontal
2 1 Polea PLA1 1 Falange 2 PLA
Pos Cantidad Descripción Material Nota
A A
B B
C C
D D
E E
F F
4
4
3
3
2
2
1
1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO:
NOMBRE FIRMA FECHA
MATERIAL:
REVISIÓN
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
N.º DE DIBUJO
ESCALA:1:1 HOJA 1 DE 1
A4Polímero PLA
Plano Base: PL-PM-02 (Pos 2 , Pos 3)
PL-PM-04-R0
Falange 2 y polea Prototipo Funcional
M. Jimena López Morillo
TÍTULO:
Tobías Quispe

8.4. Planos del segundo prototipo
El presente Anexo posee los planos:
PL-PM-05-R0 – Segundo prototipo conjunto
PL-PM-06-R0 – Primer Falange – Segundo Prototipo
PL-PM-07-R0 – Segunda Falange y polea – Segundo Prototipo
63

2
4 4
1 1 3
4 2 Perno Acero3 1 Falange 2 PLA PL-PM-072 6 Polea PLA PL-PM-071 2 Falange 1- Palma PLA PL-PM-06
Pos Cantidad Descripción Material Nota
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Segundo prototipo conjunto
PL-PM-05-R0PESO:
Polímero PLAA3
HOJA 1 DE 1ESCALA: 1:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

7
17
R3,5
7,4
11,2
11,5 6
10,7
70
9,6
56,4
8,1
10,
2 4,2
R5,1
20
4,9
5,5
7,5
3
R3,2
7,4 6,1
3,7
R4,8
Vista frontal
A A
B B
C C
D D
E E
F F
4
4
3
3
2
2
1
1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO:
NOMBRE FIRMA FECHA
MATERIAL:
REVISIÓN
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
N.º DE DIBUJO
ESCALA:1:1 HOJA 1 DE 1
A4Polímero PLA
Plano base: PL-PM-05 (Pos. 1)
PL-PM-06-R0
Primer Falange - Palma Segundo Prototipo
M. Jimena López Morillo
TÍTULO:
Tobías Quispe

41,
3
4,9
17
10,2
20
3 9,6
7,4
2,7
8,9
R2,7
R4,6
1 17
61,
2
7
3,7
5
6 7
,4 R3,5
11,
2
20,5
6,5
4 0,7
0,7
2
R2,5
4,5
29,
5 10,
5
2
Vista frontal
Vista frontal
2 1 Polea PLA1 1 Falange 2 PLA
Pos Cantidad Descripción Material Nota
A A
B B
C C
D D
E E
F F
4
4
3
3
2
2
1
1
DIBUJ.
VERIF.
APROB.
FABR.
CALID.
SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
ACABADO:
NOMBRE FIRMA FECHA
MATERIAL:
REVISIÓN
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
N.º DE DIBUJO
ESCALA:1:1 HOJA 1 DE 1
A4Polímero PLA
Plano Base: PL-PM-05 (Pos 2 , Pos 3)
PL-PM-07-R0
Falange 2 y polea Prototipo Funcional
M. Jimena López Morillo
TÍTULO:
Tobías Quispe

8.5. Planos del tercer prototipo
El presente Anexo posee los planos:
PL-PM-09-R0 – Falange 1 -Índice
PL-PM-10-R0 – Falange 2- Índice
67

51
5,8
10
14
10 5
E
E
FF
5
5
3,4
3,4
13
4,7
5
1
SECCIÓN E-E
8
8
8,4
2
SECCIÓN F-F
11,1 19,1
3
3
R1,8
1,3
2,9
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 1 - Índice
PL-PM-09-R0Plano Base: PL-PM-11 (Pos 8)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

11,
6
39 R7
5
6
I
I
JJ
3,4
5
4,7
10
13
9
9
R10
R1,8
1 R4
SECCIÓN I-I
4
8
2
2
13,5
1,6
SECCIÓN J-J
29,1
R1,50
2
26,1
43
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 2 - Índice
PL-PM-10-R0Plano Base: PL-PM-11 (Pos 9)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

70
8.6. Planos de la mano en conjunto y sus partes
El presente Anexo posee los planos:
PL-PM-14-R0 Falange 1 – Anular
PL-PM-15-R0 Falange 2 – Anular
PL-PM-12-R0 Falange 1 – Meñique
PL-PM-13-R0 Falange 2- Meñique
PL-PM-16-R0 Falange 1- Mayor
PL-PM-17-R0 Falange 2 –Mayor
PL-PM-18-R0 Falange 1 – Pulgar
PL-PM-19-R0 Falange 2 – Pulgar
PL-PM-20-R0 Unión Pulgar - Mano
PL-PM-21-R0 Palma - Base
PL-PM-21-R0 Palma - Base
PL-PM-22-R0 Palma -Tapa
PL-PM-11-R0 Mano Conjunto

15,
6
10
5,8
50
10
5
CC
D
D
5
3,4
5
3,4
13
R4,7
R4,
70
4,7
8,5
2
9,1
8
8
SECCIÓN C-C
11,1
18,1
3
3
2,9
R1,8
1,3 29,1
5
1
SECCIÓN D-D
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 1 - Anular
PL-PM-14-R0Plano Base: PL-PM-11 (Pos 4)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

R7,8 43,4
5
13,
6
7,4
7,6
GG
H
H
10
5
4,7
3,4
13
9
13,4
R10
29,1
26,1
48,2
2
R1,5
8
4
17,5
2
2
1,7
SECCIÓN G-G
1
R1,8
R4
R4 SECCIÓN H-H
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 2 - Anular
PL-PM-15-R0Plano Base: PL-PM-11 (Pos 5)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

11,
3
44,3
5,8
5
10 10
AA
B
B
7
7,9
2
4,2
SECCIÓN A-A
1
5
SECCIÓN B-B
13
3,4
3,4
5 5
4,7
R4,7 R4,70
3
2,9
R1,8 1,3
11,5
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 1 - Meñique
PL-PM-12-R0Plano Base: PL-PM-11 (Pos 2)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

35
R5,7
9
5
7,4
AA
B
B
13
3,4
10
5
4,7
5 9
R10
2,1
2
9,5
4 8
1,4
SECCIÓN A-A
26,1
29,1
37,6
2
R1,5
R1,8 1
SECCIÓN B-B
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 2 - Meñique
PL-PM-13-R0Plano Base: PL-PM-11 (Pos 3)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

17,
3
10
58,7
5,8
10 5
GG
K
K
13
3,4
3,4
5
5
4,7 4,7
R4,7
R4,7
8 8
8
1,7
11
1,7 SECCIÓN G-G
21,1
37,6
3
3
5
1,30
R1,8
32,6
5
1
SECCIÓN K-K
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 1 -Mayor
PL-PM-16-R0Plano Base: PL-PM-11 (Pos 6)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

R8,7
45,2
14,
9
5
7,4
9,3
KK
L
L
13
3,4 5
4,7
10 15,2
9
R10
8
4 2
2
19,2 1,7
SECCIÓN K-K
R1,8
1 R4
R4 SECCIÓN L-L
29,1
26,1
50,8
R1,5 2
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 2 - Mayor
PL-PM-17-R0Plano Base: PL-PM-11 (Pos 7)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

1,8
Falange 1 -Pulgar
APROB.
VERIF.
DIBUJ.
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
FABR.
PL-PM-18-R0Plano Base: PL-PM-11 (Pos 10)
Polímero PLAA3
CALID.
ANGULAR:
ESCALA: 2:1
N.º DE DIBUJO
Instituto Balseiro
Div. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHA
Ingeniería Mecánica
HOJA 1 DE 1
ACABADO:
NOMBRE FIRMA
SI NO SE INDICA LO CONTRARIO:
LAS COTAS SE EXPRESAN EN MM
ACABADO SUPERFICIAL:
TOLERANCIAS:
LINEAL:
Tobías Quispe
10
37
10
15
5
5,8
LL
M
M
3,4 3,4
R4,7
4,7
5
5
4,7
13
R4,
7
SECCIÓN M-M
5
1
21,1
5 15,6
R1,8
3
1,3
SECCIÓN L-L
8,6
8
2
5

R7,5
23,5
14,
6
5
2
7
M
M
NN
13
3,4
4,7
5
10
R4,7
14
9,7
1
R1,8
SECCIÓN M-M
8
2
2
11,3 1,5
SECCIÓN N-N
29,1
26,1
R1,5
A A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Falange 2 - Pulgar
PL-PM-19-R0Plano Base: PL-PM-11 (Pos 11)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 2:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

13,7
18,7
2
10
15,4
68,
4
14,9
11°
8
10
20
22,
9
6,1
9
R 1
PP
Q
Q
21
3
6
10
3
17
5,8
4,5
3
16,4
S
S
13,
7
6
5,2
T
SECCIÓN P-PESCALA 1 : 1
5,5
6
4
6 R 1
6
SECCIÓN Q-QESCALA 1 : 1
3,6
9,5
4,2
SECCIÓN S-SESCALA 1 : 1
0,7
2
2 2
DETALLE TA A
B B
C C
D D
E E
F F
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
TÍTULO:
M. Jimena López Morillo
Union Pulgar - Mano
PL-PM-20-R0Plano Base: PL-PM-11 (Pos 12)
Polímero PLAA3
HOJA 1 DE 1ESCALA: 1:1
N.º DE DIBUJO
Instituto BalseiroIngeniería MecánicaDiv. de robótica del CAREM
REVISIÓN
MATERIAL:
FECHAFIRMANOMBRE
ACABADO:SI NO SE INDICA LO CONTRARIO:LAS COTAS SE EXPRESAN EN MMACABADO SUPERFICIAL:TOLERANCIAS: LINEAL: ANGULAR:
CALID.
FABR.
APROB.
VERIF.
DIBUJ.
Tobías Quispe

9. Agradecimientos
Gracias Marina Gugenbichler por ser mi pilar en el día a día y un gran ejemplo
de esfuerzo diario junto con Diego López Morillo. Gracias a ambos por su apoyo y
aliento incondicional.
Gracias Santiago Castro Lacroze por el apoyo, paciencia y sobretodo amor
todos los días. Sin vos no hubiese podido llegar a esta instancia.
Gracias a la División de robótica del CAREM y en especial a mi director Tobías
Quispe. Sin su orientación y sus valiosas sugerencias esta tesis no habría sido
posible.
83

10. Bibliografía
1. México, Universidad Nacionar Autónoma de. Reseña histórica de las
prótesis. [En línea] 2018.
2. Norton, Kim. spanish history prothetics. Un breve recorrido por la historia
de la protésica. [En línea] 2007.
3. Enfermedades, Tratamiento y. Breve historia de las prótesis desde la
antigüedad hasta nuestros días. [En línea] 25 de Julio de 2013.
4. Pedroza, Alejandro. Historia de las protesis de mano. [En línea] 2009.
5. Burgos, Cesar Augusto Quinayás. Diseño y construcción de una prótesis
robótica de mano funcional adaptada a varios agarres. 2010.
6. Varias, John. Anatomía interesante. Todos los músculos de la mano. [En
línea] 9 de Febrero de 2014.
7. Músculos. https://www.musculos.org. Músculos de la mano. [En línea] 2013.
8. Toro, Gary Job Linero Ceto y Carlos Fabián Guerro. Aprende en línea
udea. Músculos de la mano. [En línea] 2013.
9. K. N. An, E. Y. Chao, W. P. Cooney y R. L. Linscheid. Normative model of
human hand for biomechanical analysis. Minnesota U.S.A : s.n., 1979.
84