
04/18/23 1
Probabilistic Reasoning
CIS 479/579
Bruce R. Maxim
UM-Dearborn
04/18/23 2
Uncertainty
• Dealing with incomplete and uncertain data is an important part of many AI systems
• Approaches– Ad Hoc Uncertainty Factors– Classical Probability Theory– Fuzzy Set Theory– Dempster Shaffer Theory of Evidence

04/18/23 3
Using Probabilistic Reasoning
• Relevant world or domain is random– more knowledge does not allow us to describe
situation more precisely
• Relevant domain is not random, rarely have access to enough data– experiments too costly or too dangerous
• Domain is not random, just not described in sufficient detail– need to get more knowledge into the system

04/18/23 4
Certainty Factor Questions
• How are certainties associated with rule inputs (e.g. antecedents)?
• How does the rule translate input certainty to output certainty (i.e. how deterministic is the rule?)
• How do you determine the certainty of facts supported by several rules?

04/18/23 5
Ad Hoc Approach
• Minimum of value on the interval [0,1] associated with each rule antecedent is a rule’s input certainty
• Assume some attenuation or deterministic rule will be used as a multiplier to map input certainty to output certainty
• When several rules supporting the same fact the maximum if the rule output certainties will be the overall certainty of the fact
04/18/23 6
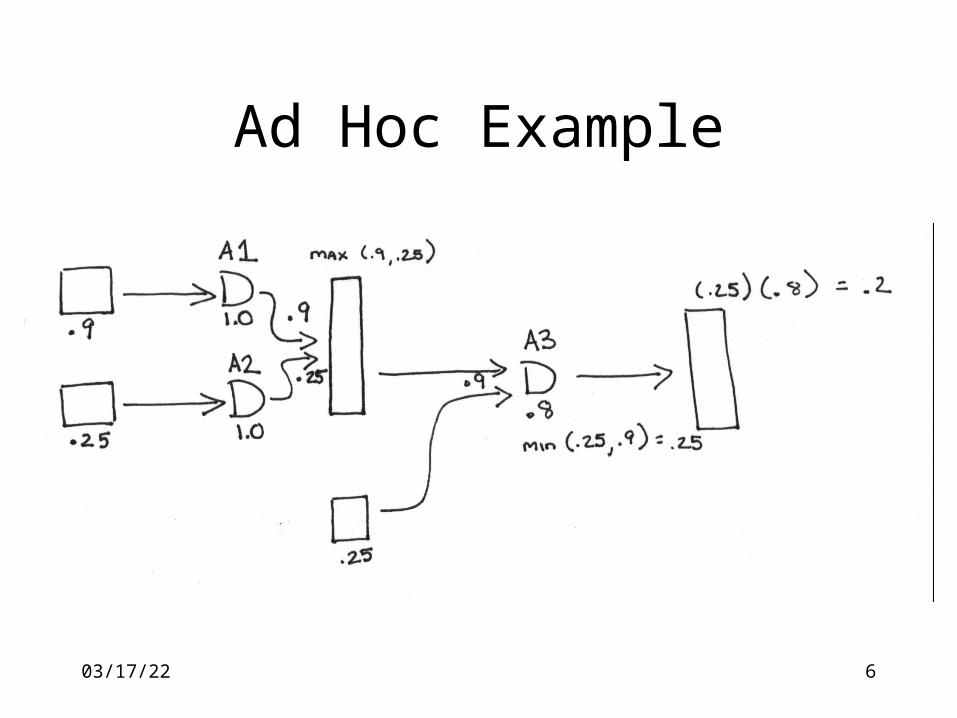
Ad Hoc Example

04/18/23 7
Ad Hoc Example
• Rule A1 translates input to output(0.9) * (1.0) = 1.0
• Rule A2 translates input to output(0.25) * (1.0) = 0.25
• Fact supported by A1 and A2max(0.25, 0.9) = 0.9
• Input to Rule A7min(0.9, 0.25) = 0.25
• Rule A7 translates input to output(0.25) * (0.8) = (0.2)
04/18/23 8
Probability Axioms
P(E) = Number of desired outcomes
Total number of outcomes
= | event | / |sample space|
P(not E) = P(~E)
= 1 – P(E)

04/18/23 9
Additive Laws
P(A or B) = P(A B)
= P(A) + P(B) – P(A B)
If A and B are mutually exclusive
A B =
P(A B ) = 0
P(A or B) = P(A) + P(B)

04/18/23 10
Multiplicative Laws
P(A and B) = P(A B)
= P(A) * P(B|A)
= P(B) * P(A|B)
For independent events
P(B|A) = P(B)
P(A|B) = P(A)
P(A B) = P(A) * P(B)

04/18/23 11
Bayes Theorem
P(Hi |E) Probability Hi is true given evidence E
P(E | Hi) Probability E is observed given Hi
P(Hi) = Hi true regardless of evidence
P(Hi |E) = P(E | Hi) * P(Hi) = P(E | Hi) * P(Hi)
k
P(E | Hk) * P(Hk) P(E)
n=1

04/18/23 12
Bayes Example
• Prior Probability it will rainP(H) = 0.8
• Conditional probabilities: Geese on the lake, given rain tomorrow
P(E|H) = 0.2
Geese on lake, with no rain tomorrow
P(E | ~H) = 0.025

04/18/23 13
Bayes Example
• EvidenceP(E) = P(E | H) * P(H) + P(E | ~H) * P(~H)
= (0.02)*(0.8) + (0.025)*(0.2) = (0.016) + (0.005) = 0.021
• Posterior probabilityRain given geese on lake
P(H | E) = (P( E | H) * P(H)) / P(E) = (0.016 / 0.021) = 0.7619

04/18/23 14
Bayes Example
• Posterior probability
No rain given geese on lake
P(~H | E) = (P( E | ~H) * P(~H)) / P(E)
= (0.005 / 0.021)
= 0.2381

04/18/23 15
Weakness of Bayes Approach
• Difficult to get all apriori conditional and joint probabilities required
• Database of priorities is hard to modify because of large number of interactions
• Lots of calculations required• Outcomes must be disjoint• Accuracy depends on complete
hypothesis

04/18/23 16
Problems Which Can Make Use of Probabilistic Inference
• Information available is of varying certainty or completeness
• Need nearly optimal solutions
• Need to justify decisions in favor of alternate decisions
• General rules of inference are known or can be found for the problem

04/18/23 17
Fuzzy Set Theory
• In ordinary set theory every element “x” from a given universe is either in or out of a set S
x S
x S
• In fuzzy set theory set membership is not so easily determined

04/18/23 18
When is a pile of chalk big?
• If we have three pieces of chalk in the room is that considered a big pile of chalk?
• Some people might say, yes that is a big pile and some would not.
• Someplace between those three pieces of chalk and a whole room full of chalk the pile of chalk turns from a small pile into a big pile.
• This could be a different spot for different people.

04/18/23 19
Membership Function
F:[0,1]n [0,1]
x S f(x)
x S 1/x

04/18/23 20
Possibilistic Logic Dependent
Events
Probabilistic Logic Independent
Events
A a a
B b b
not A 1-a 1 - a
A and B min(a,b) a * b
A or B max(a,b) a + b – a*b
A Bnot A or (A and B)
max(1 - a, b) (1 - a) + a * b
A xor B max(min(a, 1 - b), min(1 - a, b))
a+b-2ab+a2b+ab2-a2b2
04/18/23 21
Possibilistic Example
AssumeP(X) = 0.5, P(Y) = 0.1, P(Z) = 0.2
Determine P(X (Y or Z))P(Y or Z) = max(P(Y), P(Z)) = max(0.1, 0.2) = 0.2P(X (Y or Z)) = max(1 – P(X), P(Y or Z)) = max(1 – 0.5, 0.2) = max(0.5, 0.2) = 0.5

04/18/23 22
Probabilistic Example
AssumeP(X) = 0.5, P(Y) = 0.1, P(Z) = 0.2
Determine P(X (Y or Z))P(Y or Z) = P(Y) + P(Z) – P(Y) * P(Z) = 0.1 + 0.2 – 0.1 * 0.2 = 0.3 – 0.02 = 0.28P(X (Y or Z)) = not P(X) + P(X) * P(Y or Z) = (1 – 0.5) + 0.2 * 0.28) = 0.5 + 0.14 = 0.64
04/18/23 23
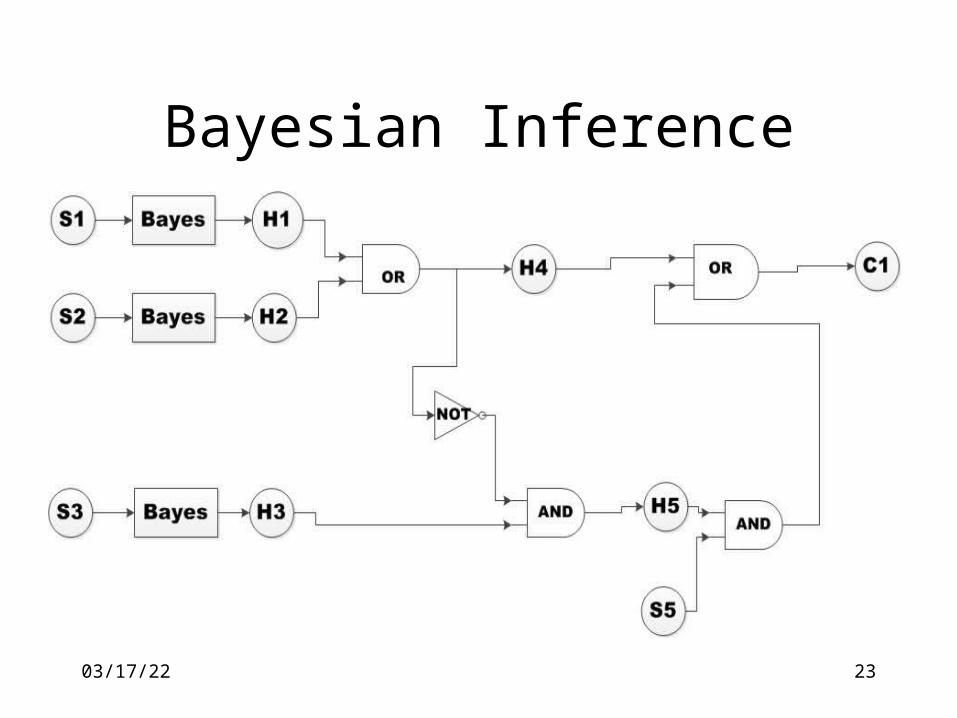
Bayesian Inference

04/18/23 24
Bayesian Inference
• SymptomsS1: Clanking SoundS2: Low pickupS3: Starting problemS4: Parts are hard to find
• ConclusionC1: Repair Estimate > $250

04/18/23 25
Bayeisan Inference
• Intermediate HypothesesH1: Thrown connecting rod
H2: Wrist Pin Loose
H3: Car Out of Tune
• Secondary HypothesesH4: Replace or Rebuild Engine
H5: Tune Engine

04/18/23 26
Bayeisan Inference
• These must be known in advanceP(H1), P(H2), P(H3)
P(S | Hi) for i = 1, 2, 3
• Computed using Bayes formulaP(S) = P(Hi) P(S | Hi)
P(Hi | S) for i = 1, 2, 3

04/18/23 27
Bayesian Inference• H4: Replace or Rebuild Engine
P(H4) = P(H1 or H2) = max(P(H1 | S), P(H2 | S))
• H5: Tune EngineP(H5) = not (H1 or H2) and H3 = min(1 – max(P(H1 | S), P(H2 | S)), P(H3))
• C1: Repair Estimate > $250P(C1) = P(H4 or P(H5 and S4)) = max(P(H4 | S), min(P(H5 | S), V)note: V = 1 if S4 is true and 0 otherwise







