Download - actionneur et positionneurs (corrigé)

Servomoteur à membrane type directeServomoteur Servomoteur àà membrane type directemembrane type directeServomoteur à membrane avec ressort à action directe.Action directe : La mise sous pression du boîtier de membrane déplace la tige du servomoteur vers le bas. Lorsque la pression diminue, la tension du ressort déplace la tige vers le haut.
temps de réponse très court : finesse de réglage.
Mode de raccordement : l’assemblage entre la tige de l’actionneur et la vanne se fait a l’aide d’une noix en deux partie.
Echelle de pression de fonctionnement :
3 à 15 psi ou 6 à 30 psi
Connections du signal : ¼ inch NPT, ½ inch NPT

Servomoteur à membrane type directeServomoteur Servomoteur àà membrane type directemembrane type directePosition de sécurité : si la pression de commande fait défaut, le ressort déplace la tige jusqu’àsa position extrême haute. Ceci fournit la position de sécurité: ouverture avec les vannes dont le clapet se ferme par la descente de la tige et fermeture, avec celles dont le clapet s’ouvre.

Servomoteur à membrane type directeServomoteur Servomoteur àà membrane type directemembrane type directeRessort : Chaque ressort a une échelle de pression indiquée sur la plaque signalétique cette échelle est appelée ‘’Bench Set ‘’
Si l’échelle de pression de commande,appliquée pour obtenir une course donnée,est différente de celle indiquée sur la plaque signalétique ,il est possible de modifier la tension du ressort
Visser l’écrou de réglage repère 12 dans l’arcade pour comprimer le ressort ou le dévisser pour détendre le ressort.

Servomoteur à membrane type directeServomoteur Servomoteur àà membrane type directemembrane type directe
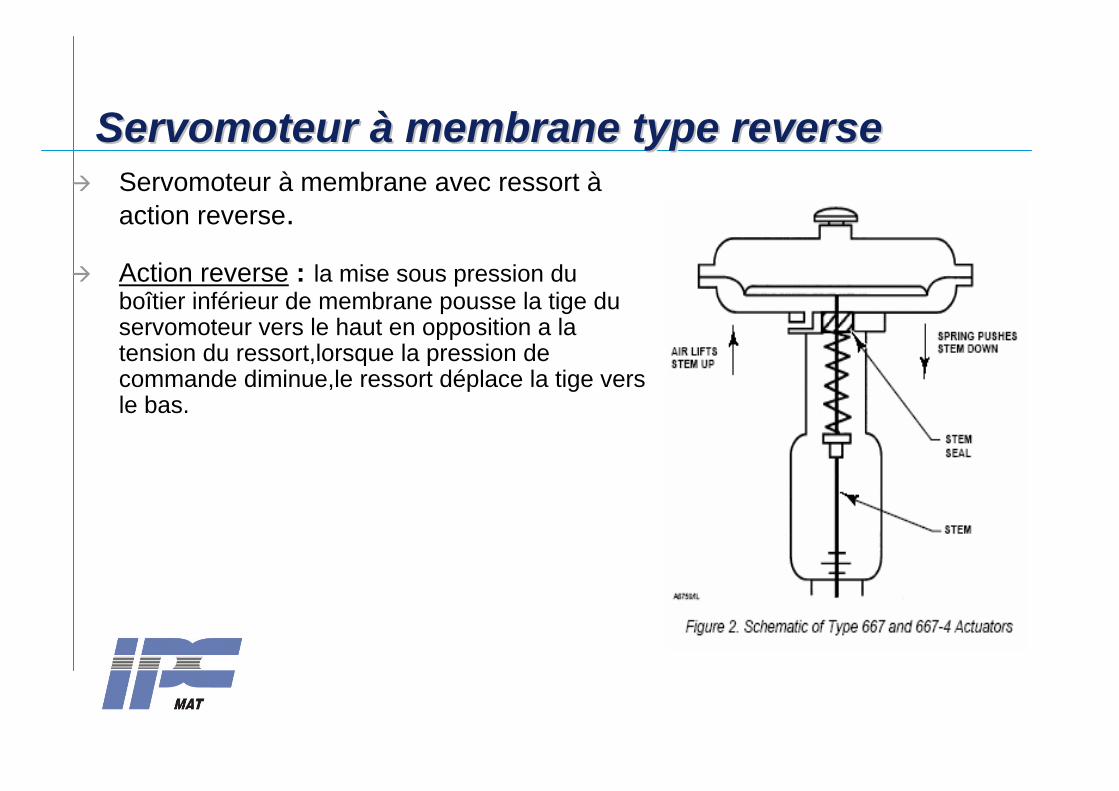
Servomoteur à membrane type reverseServomoteur Servomoteur àà membrane type reversemembrane type reverseServomoteur à membrane avec ressort àaction reverse.
Action reverse : la mise sous pression du boîtier inférieur de membrane pousse la tige du servomoteur vers le haut en opposition a la tension du ressort,lorsque la pression de commande diminue,le ressort déplace la tige vers le bas.

Servomoteur à membrane type reverseServomoteur Servomoteur àà membrane type reversemembrane type reverse

Positionneurs électropneumatiquesPositionneurs Positionneurs éélectropneumatiqueslectropneumatiquesLe positionneur électropneumatique est composé d’un convertisseur électropneumatique I/P et un positionneur pneumatique .
Signal pneumatique : échelle standard 3-15 psig ou 6-30 psig.
Signal d’entrée courant : 4-20mA.
Signal de sortie : jusqu’à 95 % de la pression d’alimentation.

Gamme Positionneurs intelligents Gamme Positionneurs intelligents Gamme Positionneurs intelligents

Gamme Positionneurs intelligentsGamme Positionneurs intelligentsGamme Positionneurs intelligents
Caractéristiques de construction et fonctionnement : • Utilisation du protocole Hart : superposition du signal numérique sur le 4-20 mA existant
sans câblage supplémentaire. Le courant fournit le signal de commande, la partie numérique fournit l ’information.
• Construction modulaire : Boîtier de raccordement, module électronique, convertisseur I/P, relais amplificateur
• Dialogue :
– Soit, une interface de communication portative « Pocket » utilisable pour tous les instruments « smart » sur la vanne, aux borniers du site ou en salle de contrôle
– Soit, avec un logiciel sur PC, environnement Windows ou sur station de travail du SNCC
• Sécurité intrinsèque et boîtier anti-déflagrant

Principe de fonctionnement Principe de fonctionnement
Pneumatic Relay
I/P Converter
TerminalBox
Gauge
Gauge
Gauge
Printed Wiring Board (PWB)
PressureSensors
Output A
Output B
Drive Signal
I/P Output Pressure
Air Supply
Minor LoopFeedback
Input Signal (4 to 20 mA)Digital Signal (HART Protocol)
Travel Sensor Provides Feedback

La pocket 375La pocket 375La pocket 375Un outil de terrain
Interrogation.
Configuration.
Calibration.
Test.







