Instituto Tecnológico de Aeronáutica – ITA/IEA
AE-249 - AEROELASTICIDADE
Aeroelasticidade Estática -Torção de asas

Divergência de uma asaCaso de estudo – divergência de uma asa sem enflechamento, com rigidez igualmente distribuída ao longo da envergadura.Hipóteses: Alongamento grande, pequenas deformações, de forma a permitir que a asa seja modelada por uma equação diferencial linear;Pode-se assumir a teoria de St. Venant, e a asa pode ser idealizada como um conjunto de pequenas seções de asa justapostos ao longo da envergadura.

Modelo estrutural da asa contínua
( ) dT y GJdyθ
=
θ
0ydT dTM T tdy T dy t dydy dy
⎛ ⎞ ⎛ ⎞Σ = = − − + = − −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠
t(y)
V
Eixo elástico x
ce
d
LT
dy
tdy
V
y
Aproximação da asa por uma viga
Condição de contorno
¼ c
cg

Modelo estrutural da asa contínua
Assume-se que a estrutura está sujeita a uma distribuição de torque t(y) contínua, ao longo da envergadura, com sinal positivo, o que representa um momento de cabrar de cada seção.Da teoria de St. Venant, pode-se relacionar as equações de equilíbrio com as forças atuantes:
( )dT d dGJ t ydy dy dy
θ⎛ ⎞= = −⎜ ⎟
⎝ ⎠( ) dT y GJ
dyθ
= ⇒
Esforços aerodinâmicosOs esforços aerodinâmicos atuantes são função das deformações estruturais, e neste caso assume-se um primeira aproximação onde a interferência aerodinâmica;A equação anterior pode ser empregada para calcular a divergência de uma asa como a indicada na figura anterior.
Modelo aerodinâmicoTeoria das faixas: Assume que não existe interferência aerodinâmica entre faixas que discretizam a asa ao longo da envergadura.
Desta forma o carregamento aerodinâmico pode ser facilmente assumido como a soma dos carregamentos aerodinâmicos de infinitas seção típicas distribuídas ao longo da envergadura.
( ) ( )l l ol y qc C qcCα αα α θ= = +
( ) ( ) 2l o mact y qc C qc C nmgdeα
α θ= + + +

Equações de equilíbrio - Momentos
( )dT t ydy
= −
( )dT d dGJ t ydy dy dy
θ⎛ ⎞= = −⎜ ⎟
⎝ ⎠
( ) ( ) 2l o mact y qceC qc C nmgdα α θ= + + + ⇒
( )2l l o mac
d dGJ qceC qceC qc c nmgddy dy α α
θ θ α⎛ ⎞
+ = − + +⎜ ⎟⎝ ⎠
T T+dT/dydy
t dyraiz ponta
V
y

Solução da Equação diferencial
simplificamos para
2
2lqceCd K
dy GJαθ θ⎛ ⎞+ = −⎜ ⎟
⎝ ⎠
( )2 /l o macK qceC qc c nmgd GJαα= + +
2 lqceCGJ
αλ =
2 Kθ λ θ′′ + = −
( ) 2sin cos /y A y B y Kθ λ λ λ= + −
Fazendo
e
Que possui solução na forma

Condições de contorno
( ) 2sin cos /y A y B y Kθ λ λ λ= + −
( ) 2 20 0 K KB Bθλ λ
= = − ⇒ =
( ) ( ) 20 cos sinKT L GJ L GJ A L Lθ λ λ λ λλ
⎡ ⎤′= = = −⎢ ⎥⎣ ⎦
Para resolvermos o problema precisamos definir condições de contorno.Para particularizar a nossa solução:
A forma de particularizar é aplicar as condições de contorno quecaracterizam o nosso problema, isto é uma asa reta, sem afilamentoengastada na raiz e com distribuição constantes das propriedadesde rigidez (G e J)
Momento na ponta da asa (em y = L) é nulo:
Engastamento na raiz:

Condições de contorno
( ) ( )( )
( ) ( )( )
2 1 cos tan sin
1 cos tan sinmaco
l l
Ky y L y
cc nmgdy y L ye C qceCα α
θ λ λ λλ
θ α λ λ λ
−⎡ ⎤= − −⎣ ⎦
⎛ ⎞⎡ ⎤ ⎡ ⎤⎡ ⎤ ⎡ ⎤= − + + − −⎜ ⎟⎢ ⎥ ⎢ ⎥ ⎣ ⎦⎢ ⎥⎜ ⎟⎣ ⎦ ⎣ ⎦ ⎣ ⎦⎝ ⎠
Resolvendo as equações resultantes da aplicação da condição deContorno, temos A e B definidos pela relações anteriores chegando a:
Esta equação representa a distribuição de torção de uma asa reta eAlongada, sujeita a um carregamento aerodinâmico que a deforma emTorção.
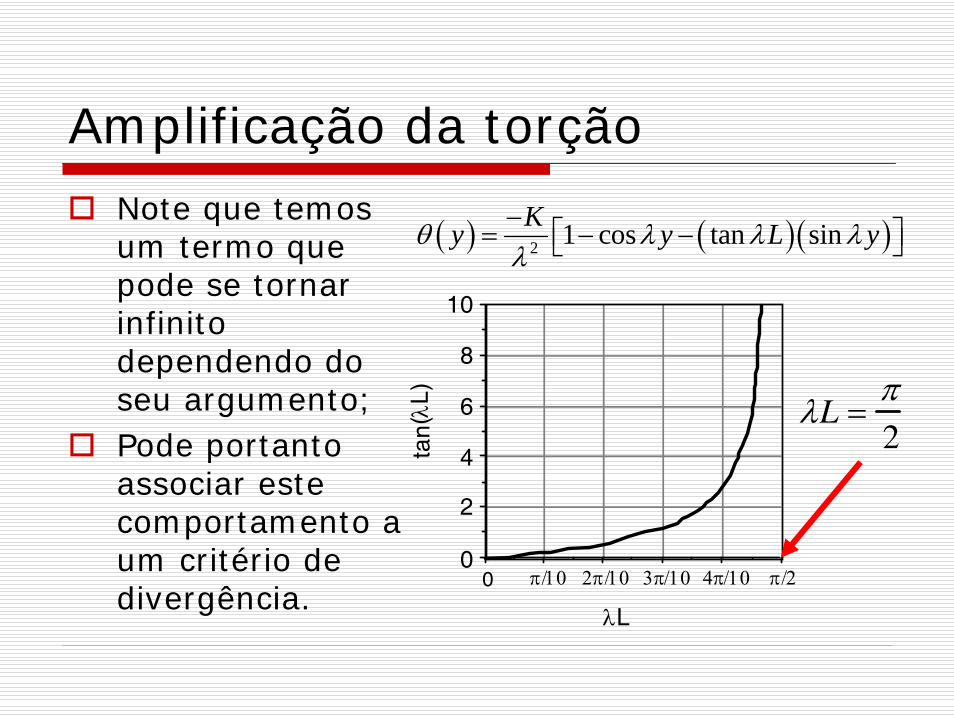
Amplificação da torçãoNote que temos um termo que pode se tornar infinito dependendo do seu argumento;Pode portanto associar este comportamento a um critério de divergência.
( ) ( )( )2 1 cos tan sinKy y L yθ λ λ λλ−
⎡ ⎤= − −⎣ ⎦
0
2
4
6
8
10
λL
tan(
λL)
π/2π/10 2π/10 3π/10 4π/100
λL =π2
Critério de divergência:Do resultado apresentado graficamente, pode-se estabelecer o seguinte critério:
Pode-se fazer uma analogia deste resultado com o obtido para a seção típica, a pressão dinâmica é diretamente proporcional a rigidez e inversamente proporcional a área da asa.
2
2 2
21
2 2
l
Dl l
qceCL GJ
GJ GJqL ceC L c LeC
α
α α
πλ
π π
= = ⇒
⎛ ⎞ ⎛ ⎞⎛ ⎞ ⎛ ⎞ ⎛ ⎞= =⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⋅⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠ ⎝ ⎠

Solução formal para a divergência
Um resultado importante que foi observado na seção típica, é que a divergência é uma fenômeno associado a estabilidade da estrutura e, consequentemente independe de forças externas atuantes.Desta forma podemos estudar a equação que representa a distribuição de torção para asa na sua forma homogênea:
2
2 0lqceCddy GJ
αθ θ⎛ ⎞+ =⎜ ⎟⎝ ⎠
Solução elementarAssume-se as mesmas condições do caso anterior, e consequentemente A e B serão diferentes.
Conhecida a solução elementar, e considerando conhecido A e B, pode-se partir para o estudo da estabilidade do sistema aeroelástico.
2
2 0lqceCddy GJ
αθ θ⎛ ⎞+ =⎜ ⎟⎝ ⎠
( ) sin cosy A y B yθ λ λ= +
Critério de estabilidade de EulerDo equilíbrio estático, chega-se a relação geral entre força e deslocamento em regime linear:
Assumindo que existe uma pequena perturbação up , que se soma a condição de equilíbrio estático discriminada daqui por diante como us , tem-se os seguinte conjunto de equações:
{ } [ ]{ }F K u=
(Leonard Euler, matemático suíço, 1707-1783)
Critério de estabilidade de Euler
[ ]{ } [ ]{ } { }[ ]{ } [ ]{ } { }
p s
S p
K u K u u F
K u K u F
= + =
+ =Porém, do equilíbrio estático temos:
[
(acrescentamos a perturbação)
]{ } { } [ ]{ } { }{ } { }[ ] [ ]
0
0
0
s p
p
K u F K u
u
K
= ⇒ =
=
=
Solução trivial
Caracteriza um estado de estabilidade neutra

Critério de estabilidade de Euler
Seentão:
A equação derivada do determinante de [K] deve ser nula (Δ=0);Δ=0 é a equação característica, e as suas raízes são os auto-valores do sistema;É um polinômio de ordem N, onde N é a dimensão da matriz [K]
Se Δ>0 – o sistema é estávelSe Δ<0 – o sistema é instável
[ ]{ } { } { } { }0 0p pK u e u= ≠
Determinante de uma matriz: A condição para que se tenha solução não nula para up , só existe se det[K] = 0 !
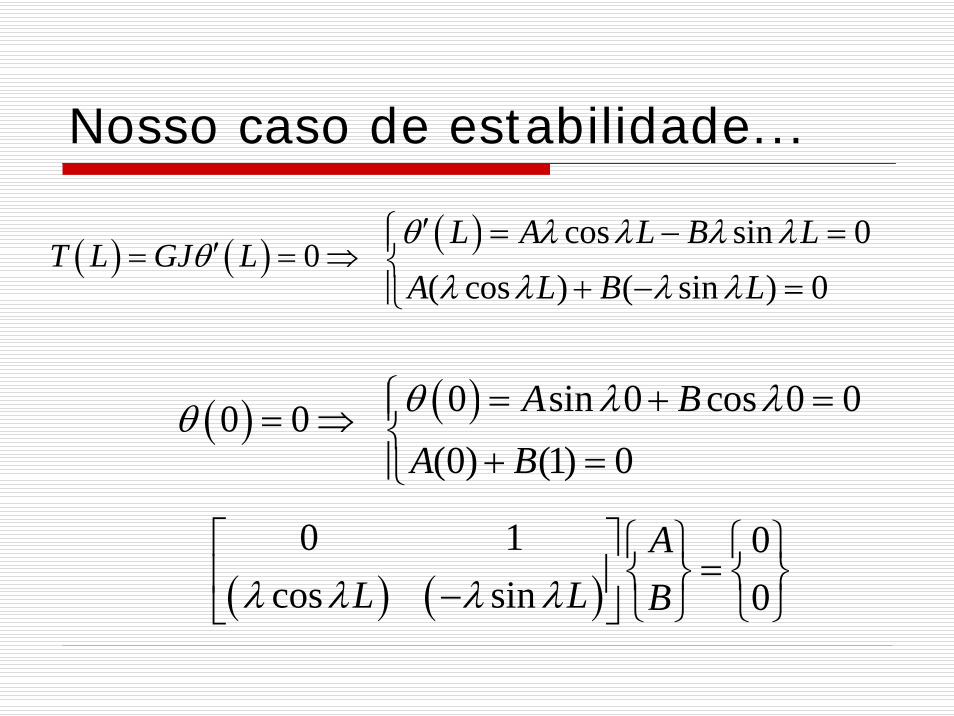
Nosso caso de estabilidade...
( ) ( ) 0T L GJ Lθ ′= = ⇒( ) cos sin 0( cos ) ( sin ) 0
L A L B LA L B Lθ λ λ λ λ
λ λ λ λ
′⎧ = − =⎪⎨
+ − =⎪⎩
( )0 0θ = ⇒ ( )0 sin 0 cos 0 0(0) (1) 0
A BA Bθ λ λ⎧ = + =⎪
⎨+ =⎪⎩
( ) ( )0 1 0
cos sin 0A
L L Bλ λ λ λ⎡ ⎤ ⎧ ⎫ ⎧ ⎫
=⎨ ⎬ ⎨ ⎬⎢ ⎥− ⎩ ⎭ ⎩ ⎭⎣ ⎦

Determinante de estabilidade
( ) ( )0 1 0
; cos 0cos sin 0
AL
L L Bλ λ
λ λ λ λ⎡ ⎤ ⎧ ⎫ ⎧ ⎫
= Δ = =⎨ ⎬ ⎨ ⎬⎢ ⎥− ⎩ ⎭ ⎩ ⎭⎣ ⎦
λL =π2
,3π2
, .. .2n +1( )π
2
λ2 L2 =π 2
4=
qDceclα L2
GJ
Soluções para a equação onde odeterminante se anula. O menorvalor deste conjunto é a pressão dinâmica de divergência. Como:
22 2 2
22
2
4
4 2
l
lD
l
qceC LGJqceC GJq
L GJ L ceC
α
α
α
πλ λ
π π
= ⇒ =
⎛ ⎞⎛ ⎞= ⇒ = ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠
λ é o autovalor!
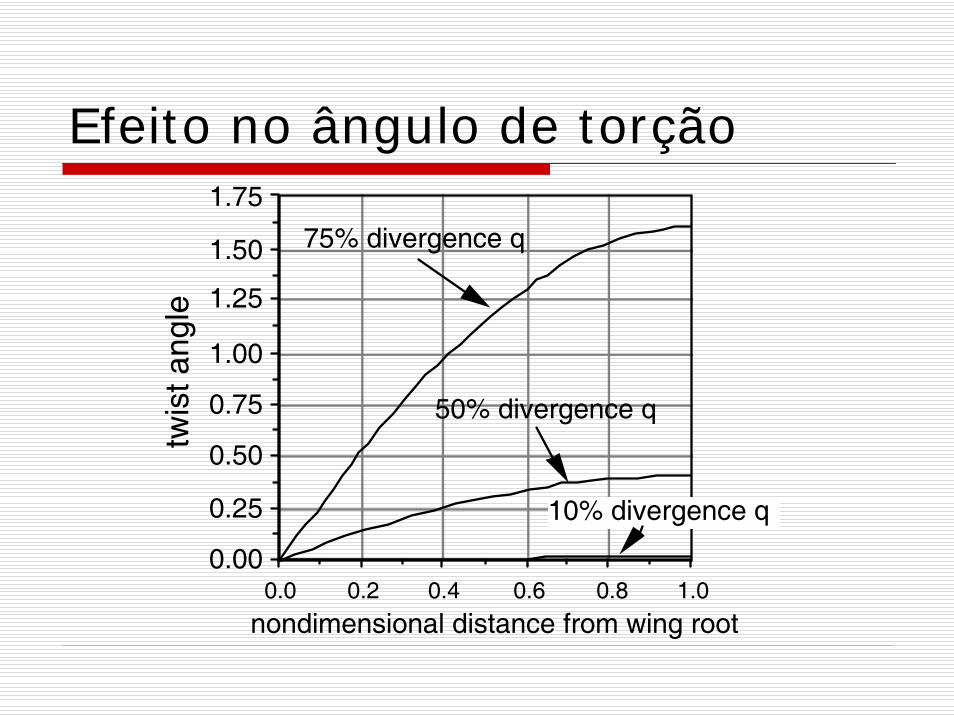
Efeito no ângulo de torção
1.00.80.60.40.20.00.00
0.25
0.50
0.75
1.00
1.25
1.50
1.75
nondimensional distance from wing root
twis
t ang
le
75% divergence q
50% divergence q
10% divergence q
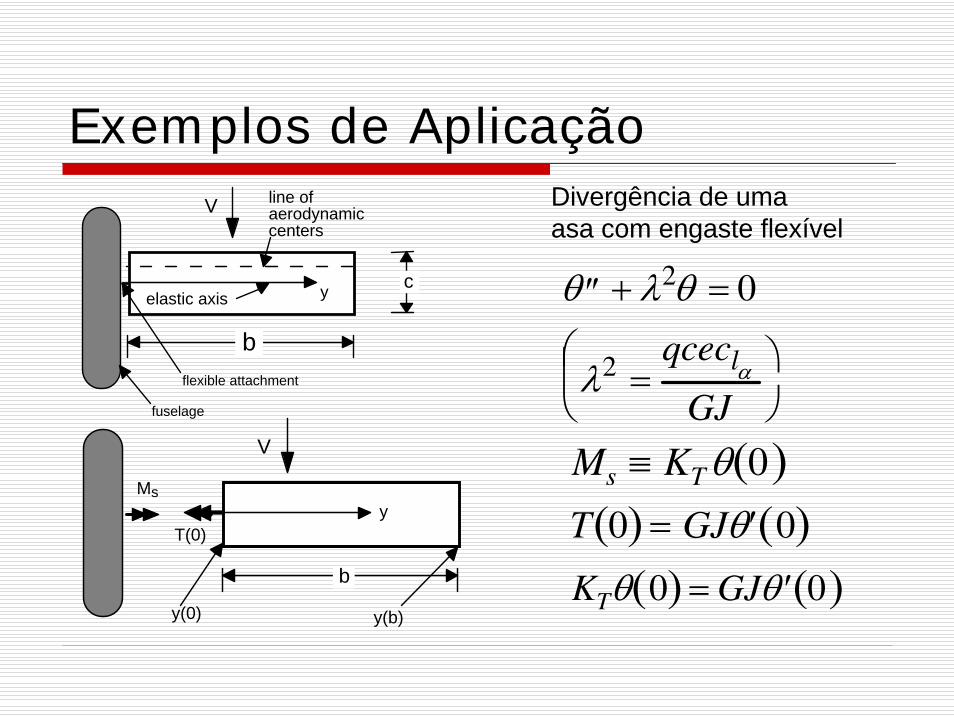
Exemplos de AplicaçãoDivergência de uma asa com engaste flexível
b
V line of aerodynamic centers
elastic axisc
flexible attachment
fuselage
y ′ ′ θ + λ2θ = 0
λ2 =qceclα
GJ
⎛ ⎝ ⎜ ⎞
⎠ Ms ≡ KT θ 0( )T 0( ) = GJ ′ θ 0( )
V
b
yMs
T(0)
y(0) y(b)KTθ 0( ) = GJ ′ θ 0( )
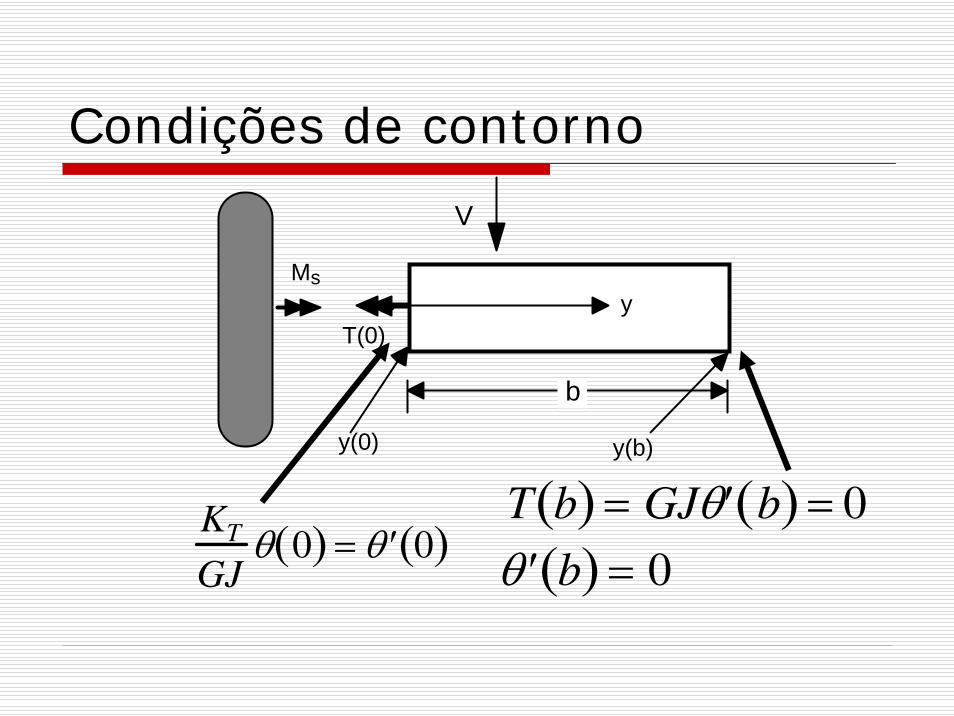
Condições de contorno
V
b
yMs
T(0)
y(0) y(b)
KT
GJθ 0( ) = ′ θ 0( )
T b( ) = GJ ′ θ b( ) = 0
′ θ b( ) = 0
Determinante de Estabilidade
θ(y) = Asin λy + Bcosλy
′ θ (y) = Aλ cos λy − Bλ sinλy
BKTb
GJ= Aλb
KT
GJθ 0( ) = ′ θ 0( )
Aβλb − B = 0
bKGJ
T
=β
O sistema de equações podeser representado da mesma forma do caso onde o engaste da asa é rígido.Define-se o parâmetro β comosendo a forma de representaro quanto o engaste é rígidocom relação a rigidez em torçãoda asa.

Determinante de Estabilidade
′ θ (b) = Aλ cos λb − Bλ sin λb = 0
βλb −1
λ cosλb −λ sinλb
⎡
⎣ ⎢ ⎢
⎤
⎦ ⎥ ⎥
A
B
⎧ ⎨ ⎩ ⎪
⎫ ⎬ ⎭ ⎪ =
0
0
⎧ ⎨ ⎩ ⎪
⎫ ⎬ ⎭ ⎪
Δ = λ −βλbsin λb + cosλb( )= 0
A torção na ponta da asa por sua vez é nula, o que implica em umacondição a mais que permite montar o sistema de equações para definir A e B.
O sistema de equações, escrito na forma matricial fica portanto:
E o determinante de divergência aeroelástica é dado por:

Equação de estabilidade
0
2
4
6
8
10
dynamic pressure parameter (2λb/π)
func
tion
valu
e
tan λb
1/λb
divergence β=0.25
divergence β=0.125
divergence β=0.75 clamped
root divergence
0 0.2 0.4 0.6 0.8 1.0
.
bKGJ
T
=β
( )sin cos 0sin cos 0
cos sin1tan
b b bb b b
b b b
bb
λ βλ λ λ
βλ λ λλ βλ λ
λβλ
Δ = − + = ⇒
⇒ − + == ⇒
⇒ =
2 lqceCGJ
αλ =
Equação transcendental ->
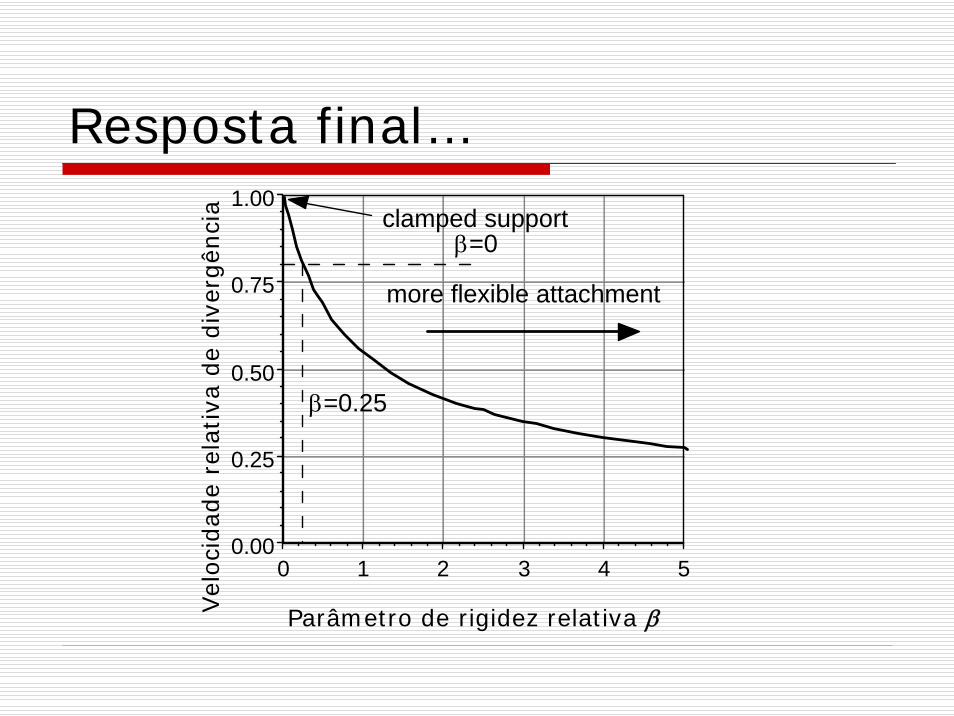
Resposta final…
5432100.00
0.25
0.50
0.75
1.00
β=0.25
more flexible attachment
clamped support β=0
Parâmetro de rigidez relativa βVel
oci
dad
e re
lativa
de
div
ergên
cia
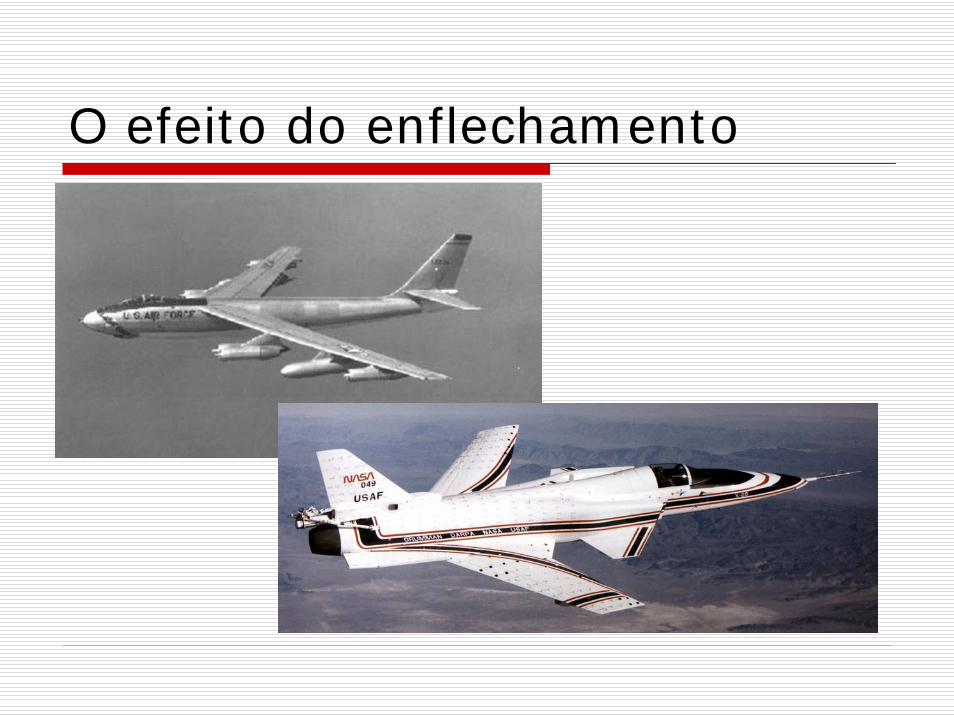
O efeito do enflechamento

Considerações iniciaisAsas podem ter o seu enflechamento positivo (“para trás”), ou negativo (“para frente”)Para que enflechar para frente ?
Tentar diminuir a distância entre o centro aerodinâmico e o centro de gravidade da aeronave;Melhorar características de controlabilidadelongitudinal para o caso de aeronaves com pouco volume de cauda, uma vez que a eficiência de sustentação aumentada;Diminuir efeito de arrasto de onda no regime transônico.

Efeitos de“Wash in” e “Wash Out”
São resultantes do acoplamento de um movimento de flexãoque induz uma torção
Aeroelasticidade estática de asas enflechadas.
ObjetivoDeterminar como a flexão, não somente a orçào como se viu antes, muda o carregamento em asas enflechadas;Apresentação de modelos aerodinâmicos e estruturais simples.

Efeito do Enflechamento
Enflechamento:Método das componentes de velocidade
Usualmente, a asa é discretizada em faixas, cuja corda de cada seção típica é perpendicular ao seu eixo elástico;Entretanto, se a asa é enflechada, o eixo elástico também será;

Efeito do Enflechamento
Quando a asa é enflechada, deve-se observar que as seções típicas, definidas perpendiculares ao eixo elástico, não estão alinhadas com o escoamento;Emprega-se a solução aerodinâmica bidimensional para resolver o problemas por faixas (aproximação);Entretanto, alguns “termos novos”surgirão nas relações de sustentação e momento, pois existirá um acoplamento do movimento de flexão que induzirá uma torção nas faixas alinhadas com o escoamento não perturbado;O primeiro passo será escrever a velocidade de deformação da asa na direção vertical como função de coordenadas de um novo sistema de eixos, onde um deles é coincidente com o eixo elástico da asa.
Efeito do Enflechamento
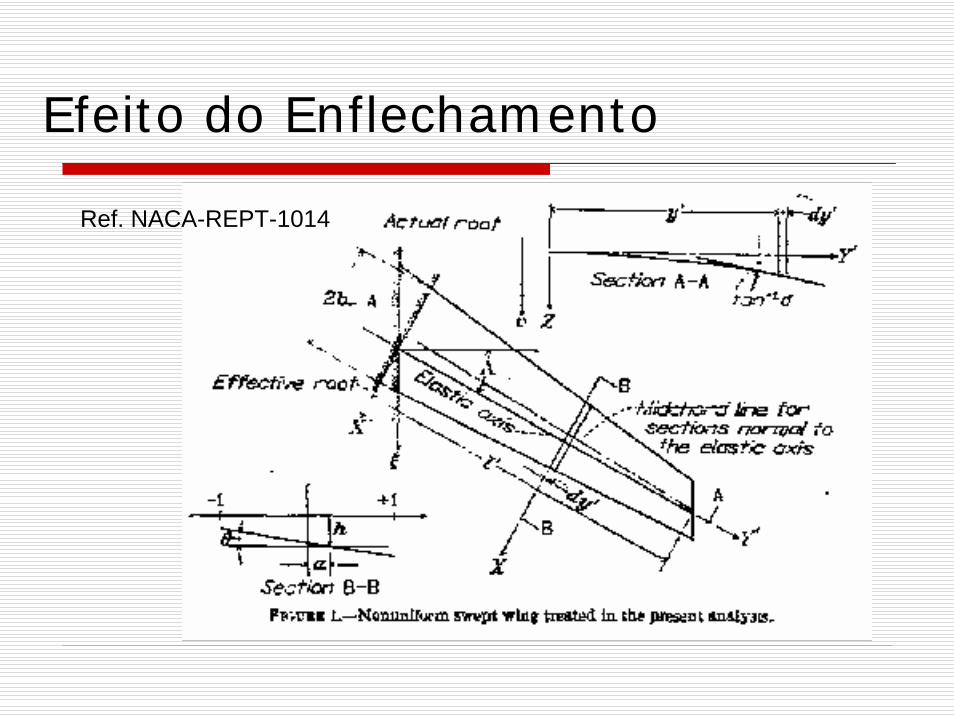
Ref. NACA-REPT-1014

Efeito do Enflechamento
Sendo “s”o eixo alinhado com a direção da envergadura e coincidente com o eixo elástico; e “r” perpendicular a “s”, um deslocamento Z escrito neste novo sistema de coordenadas é uma função: Z = Z(r,s,t) . (na figura, y’ = s)E a condição de contorno, ou seja o normalwash induzido pela superfície da asa é:
onde a coordenada ξ é paralela com o escoamento não perturbado. Define-se o normalwash (ou downwash) como sendo a velocidade normal induzida pelo deslocamento da asa sujeita ao escoamento V0.
0( , ) ( , )ZW r s V r sξ
∂= −
∂
0//Vξ ⇒ cos sinZ Z r Z s Z Zr s r sξ ξ ξ
∂ ∂ ∂ ∂ ∂ ∂ ∂= + = Λ + Λ
∂ ∂ ∂ ∂ ∂ ∂ ∂

Efeito do Enflechamento
Condição de contorno:
Porém o deslocamento na direção do eixo Z pode ser escrito como uma função de h(s) e α(s), graus de liberdade da seção típica :
onde se considerou que e Substituindo esta última relação na condição de contorno:
( ) 0 0, cos sinZ ZW r s V Vr s
∂ ∂⎛ ⎞= − Λ + Λ⎜ ⎟∂ ∂⎝ ⎠
( ) ( ) ( ),Z r s h s r sα= − ⋅cos 1.0α ≅ sinα α≅
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
0 0
0 0
, cos sin
, cos sin
W r s V h s r s V h s r sr s
hW r s V s V s r ss s
α α
αα
∂ ∂⎡ ⎤ ⎡ ⎤= Λ − ⋅ + Λ − ⋅ ⇒⎣ ⎦ ⎣ ⎦∂ ∂
∂ ∂⎡ ⎤⎡ ⎤⇒ = − Λ + Λ − ⋅⎣ ⎦ ⎢ ⎥∂ ∂⎣ ⎦

Efeito do Enflechamento
Portanto, sobre o eixo elástico (r = 0) temos a expressão final para o ângulo de ataque no sistema rotacionado, a partir da expressão para o downwash:
Como Vn = V0cos(Λ), o ângulo de ataque observado pela seção típica com corda normal ao eixo elástico é dado por:
( ) ( ) ( ) ( )
( ) ( ) ( )
0 0
0 0
, cos sin
, cos sin
hW r s V s V s r ss s
h sW r s V s V
s
αα
α
∂ ∂⎡ ⎤⎡ ⎤= − Λ + Λ − ⋅⎣ ⎦ ⎢ ⎥∂ ∂⎣ ⎦⎡ ⎤∂
⎡ ⎤⇒ = − Λ + Λ ⎢ ⎥⎣ ⎦ ∂⎣ ⎦
( ) ( ) ( ) ( )0
,, tan
cos s
W r s h sr s s
V sα α
⎛ ⎞∂− = = − Λ ⎜ ⎟Λ ∂⎝ ⎠

Efeito do Enflechamento
Mudando a notação, temos:
( ) ( )
( )0
,, tan
cos s
W r sr s
V
h ss
α θ φ
φ
− = = − ΛΛ
⎛ ⎞∂= →⎜ ⎟∂⎝ ⎠
Inclinação local do eixo elástico deformado em flexão
Ou seja, fica claro agora que o ângulo de ataque efetivo naseção típica é composto por uma componente devido a torção(θ) e uma componente devido a flexão (φ.tanΛ), que depende do enflechamento. Note que se o ângulo de enflechamento forpositivo (para trás), temos o fenômeno de “wash out”. Por outroLado, se Λ for negativo, (para frente) temos o “wash in”.

Exemplo simplificado:Asa rígida com engastes flexíveis
Vamos estudar um primeiro modelo simplificado, cujo propósito é entender o efeito do enflechamento. Supõem-se que a asa é rígida e engastada através de molas que restringem movimento de corpo rígido que em flexão e torção.
Sistemas de eixos
K 2
K 1
d f
V V cos Λ
b
A A
B
B
α o
C
C
c
Λ
A
B D
C
V
Λ
1
1
1
Vs e c ti o n
1 -1 φ s i n Λ
φ
2
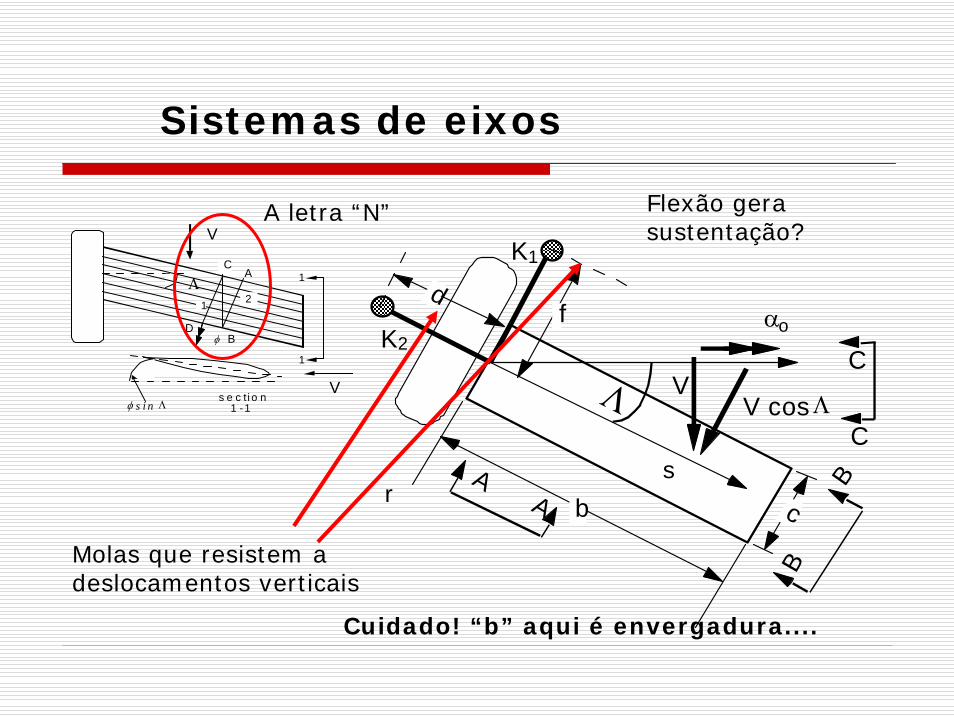
Molas que resistem a deslocamentos verticais
A letra “N” Flexão gera sustentação?
sr
Cuidado! “b” aqui é envergadura....

Acoplamento tipo flexo-torção
Os segmentos CD e AB acompanham o movimento vertical devido a flexãosem torcer. Por outro lado o segmentoCB desloca-se verticalmente, porém ele torce, pois o ponto B desloca-se mais no sentido vertical que o ponto C. O segmento CB representa a seção da asa alinhada com o escoamento.
Pela figura abaixo, pode-se entender com funciona o acoplamento entre o modo de flexão e a torção induzida a uma seção deasa enflechada, alinhada com o escoamento aerodinâmico.
A
B D
C
V
Λ
1
1
1
Vsection
1-1 φ sin Λ
φ
2
φ sinλ
Sustentação na asa flexível
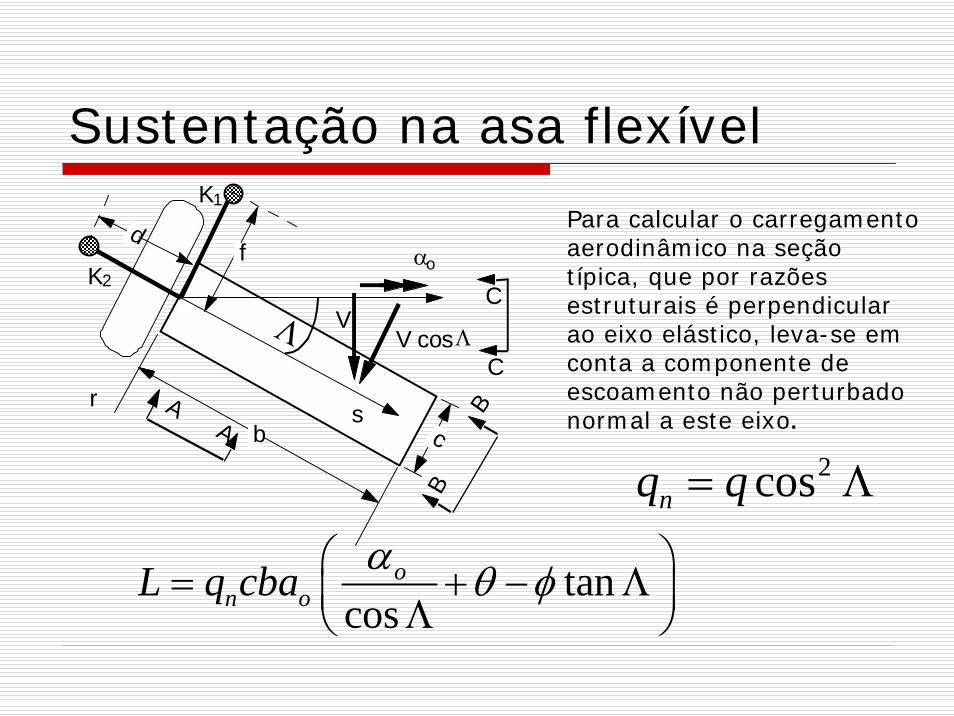
2cosnq q= Λ
tancos
on oL q cba α θ φ⎛ ⎞= + − Λ⎜ ⎟Λ⎝ ⎠
Para calcular o carregamentoaerodinâmico na seção típica, que por razões estruturais é perpendicular ao eixo elástico, leva-se em conta a componente de escoamento não perturbado normal a este eixo.
K 2
K 1
d f
V V cos Λ
b
A A
B
B
α o
C
C
c
Λ
sr

Λ−Λ+== sincos φθαα ofreestream Vv
cos sincos cos cos cos
oc corda
vV
α θ φα α Λ Λ= = = + −
Λ Λ Λ Λ
tanestruturalα θ φ= − Λ
Ângulo de ataque efetivo
(a expressão acima obtivemos da condição de contorno a pequenasPerturbações – expressão para o downwash)
Entretanto, queremos o ângulo de ataque “percebido” pela seção típica.
Estrutural ouna direção dacorda...
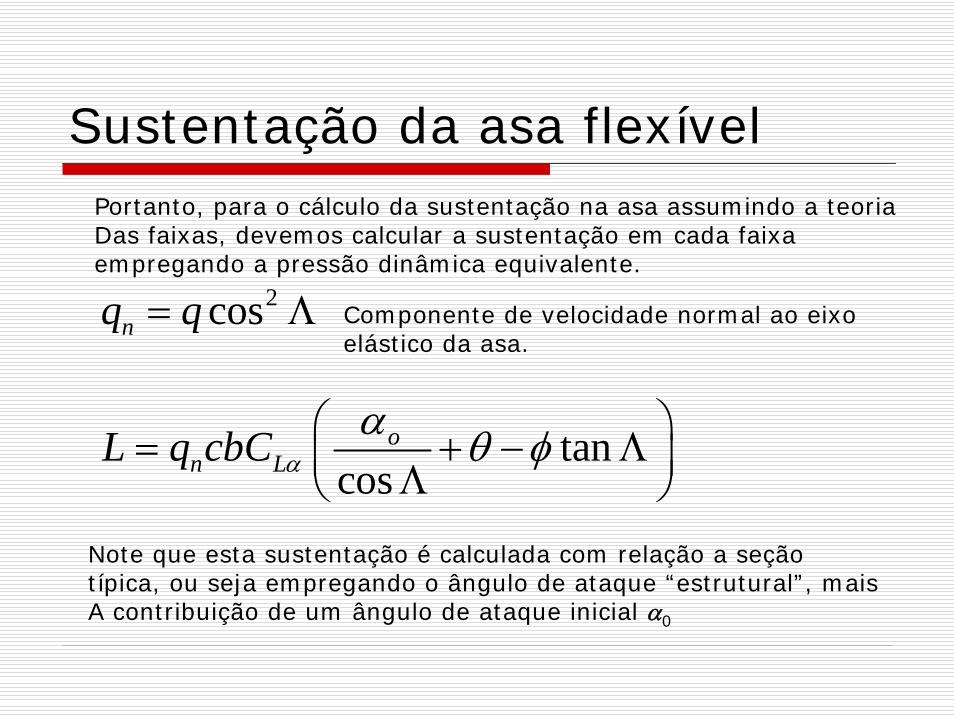
2cosnq q= Λ
tancos
on LL q cbC α
α θ φ⎛ ⎞= + − Λ⎜ ⎟Λ⎝ ⎠
Componente de velocidade normal ao eixo elástico da asa.
Sustentação da asa flexível
Note que esta sustentação é calculada com relação a seçãotípica, ou seja empregando o ângulo de ataque “estrutural”, maisA contribuição de um ângulo de ataque inicial α0
Portanto, para o cálculo da sustentação na asa assumindo a teoriaDas faixas, devemos calcular a sustentação em cada faixa empregando a pressão dinâmica equivalente.

Modelo estrutural simplificadoAssumiu-se que as molas que restringem os movimentos de corpo rígido da nossa asa enflechada são representadas pelas molas K1 e K2, dispostas com uma excentricidade “f” e “d”, respectivamente;Estas molas podem ser representadas por molas que restringem os graus de liberdade em flexão na forma da derivada da deformação ao longo da envergadura e no sentido vertical, e o grau de liberdade em torção da asa.
21K K fθ = 2
2K K dφ =
Carregamento aerodinâmicoO carregamento aerodinâmico para o nosso problema pode ser aproximado por:
( )2
0tan
2 cosb o
n lbl s ds q cC
α
α θ φ⎛ ⎞⋅ = + − Λ⎜ ⎟Λ⎝ ⎠∫
( )0
tancos
b on ll e ds q cC eb
α
α θ φ⎛ ⎞⋅ = + − Λ⎜ ⎟Λ⎝ ⎠∫Onde:
2 2 2 21 1 cos cos2 2n nq V V qρ ρ= = Λ = Λ
Note que na realidade são momentos resultantes da distribuiçãodo carregamento aerodinâmico ao longo da envergadura b, nosentido deste e no sentido da corda.

Equilíbrio em flexão (φ)
( )2
tan2 cos
b
o
on l
K l s ds
bK q cC
φ
φ α
φ
αφ θ φ
= ⋅ ⇒
⎛ ⎞= + − Λ⎜ ⎟Λ⎝ ⎠
∫
Equilíbrio estático : momentos associados à flexão e torção
( )
tancos
on l
K le dy
K q cC eb
θ
θ α
θ
αθ θ φ
= ⇒
⎛ ⎞= + − Λ⎜ ⎟Λ⎝ ⎠
∫Equilíbrio em flexão (θ)
Chegamos a umsistema de duas equações e duas incógnitas.
n lq cQ bCα
=tant = ΛEquações para o equilíbrio estático supondo ângulo de ataque inicial
02 2 2
0 coso
b b bK tQ
K eteQ
e
φ
θ
φ φαθ θ
−⎧ ⎫ ⎡ ⎤⎡ ⎤ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎢ ⎥= + ⇒⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎢ ⎥ ⎢ ⎥Λ⎩ ⎭ ⎩ ⎭⎣ ⎦ ⎪ ⎪ −⎩ ⎭ ⎣ ⎦
02 2 2
0 coso
b b bKK e e
tQQ
t e
φ
θ
φ αθ
⎡ − ⎤⎡ ⎤ ⎧ ⎫⎡ ⎤ ⎧ ⎫ ⎪ ⎪⎢ ⎥⎢ ⎥⇒ − =⎨ ⎬ ⎨ ⎬⎢ ⎥⎢ ⎥⎢ ⎥ Λ⎩ ⎭⎣ ⎦ ⎪ ⎪−⎢ ⎥⎣ ⎦ ⎩ ⎭⎣ ⎦
Note que a matriz de rigidez estrutural é desacoplada, porém amatriz aeroelástica representará um acoplamento de naturezaaerodinâmica.
“Parametrizando” o problema

( ) ( ) ⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
Λ=
⎭⎬⎫
⎩⎨⎧
⎥⎥
⎦
⎤
⎢⎢
⎣
⎡
−
⎟⎠⎞⎜
⎝⎛−⎟
⎠⎞⎜
⎝⎛ +
e
bQ
QeKQte
QbQtbK o2cos
22 αθφ
θ
φ
[ ]⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
Λ=
⎭⎬⎫
⎩⎨⎧
e
bQK o
ij 2cos
αθφ
ou
Sistema aeroelástico
Resultando em :
Resposta aeroelásticaResolve-se o sistema de equações para obter φe θ :
( ) ( )( ) ( )
1
2 2 2cos
obQtb QbKQ
Qte K Qe e
φ
θ
φ αθ
−⎡ ⎤ ⎧ ⎫+ −⎧ ⎫ ⎪ ⎪⎢ ⎥=⎨ ⎬ ⎨ ⎬⎢ ⎥Λ⎩ ⎭ ⎪ ⎪−⎢ ⎥ ⎩ ⎭⎣ ⎦
0 12cos tan
2
QbKbK Q eK
φφ
θ
αφ
⎛ ⎞⎜ ⎟⎜ ⎟= ⎜ ⎟Λ ⎛ ⎞Λ
+ −⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
0 1cos tan
2
QbK bK Q eK
θθ
φ
αθ
⎛ ⎞⎜ ⎟⎜ ⎟= ⎜ ⎟Λ ⎛ ⎞Λ⎜ ⎟+ −⎜ ⎟⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
( )22
2 betQQeKQbtKK +−⎟⎠⎞
⎜⎝⎛ +==Δ θφ
⎟⎠⎞
⎜⎝⎛ −+=Δ eKbtKQKK φθφθ 2
Estabilidade do sistema
Utilizamos o critério de estabilidade de Euler para estudar a estabilidade do sistema, chegando a uma equação parao parâmetro “Q” (não confundir “Q” com “q” de pressãodinâmica!)
2btKeK
KKQD
θφ
φθ
−=0=Δ
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ Λ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−Λ
=
2tan1cos2
φ
θ
θ
KK
eb
SeaK
q oD
n oQ q cba=
Condição de divergência
Ou agora, isolando a pressão dinâmica associada à velocidadede escoamento não perturbado temos:
O que acontecese Λ for igual a zero?

Fazendo o denominador igual a zero:
02
tan1 =
Λ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛− critical
KK
eb
φ
θ
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛≥Λ
⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛=Λ
−
θ
φ
θ
φ
KK
bc
ce
KK
bc
ce
crit
2tan
2tan
1
Sem divergência:
Análise do enflechamento
Implica em umapressão dinâmicade divergênciainfinita.
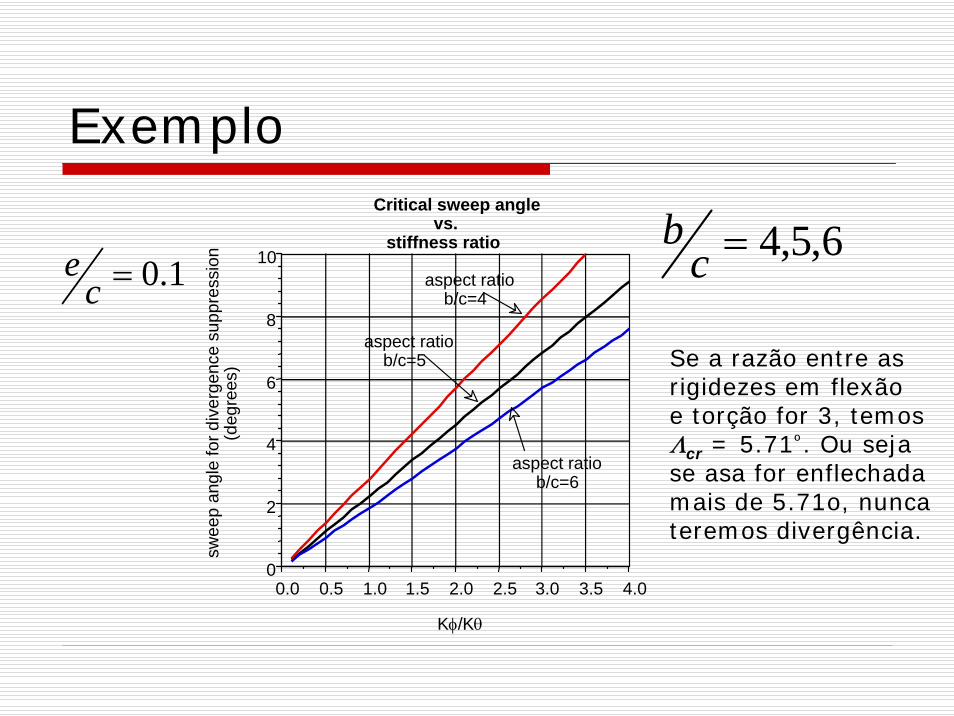
Exemplo
6,5,4=cb
1.0=ce
4.03.53.02.52.01.51.00.50.00
2
4
6
8
10
Critical sweep anglevs.
stiffness ratio
Kφ/Kθ
swee
pan
gle
for d
iver
genc
esu
ppre
ssio
n(d
egre
es)
aspect ratiob/c=4
aspect ratiob/c=5
aspect ratiob/c=6
Se a razão entre asrigidezes em flexãoe torção for 3, temosΛcr = 5.71º. Ou sejase asa for enflechadamais de 5.71o, nuncateremos divergência.
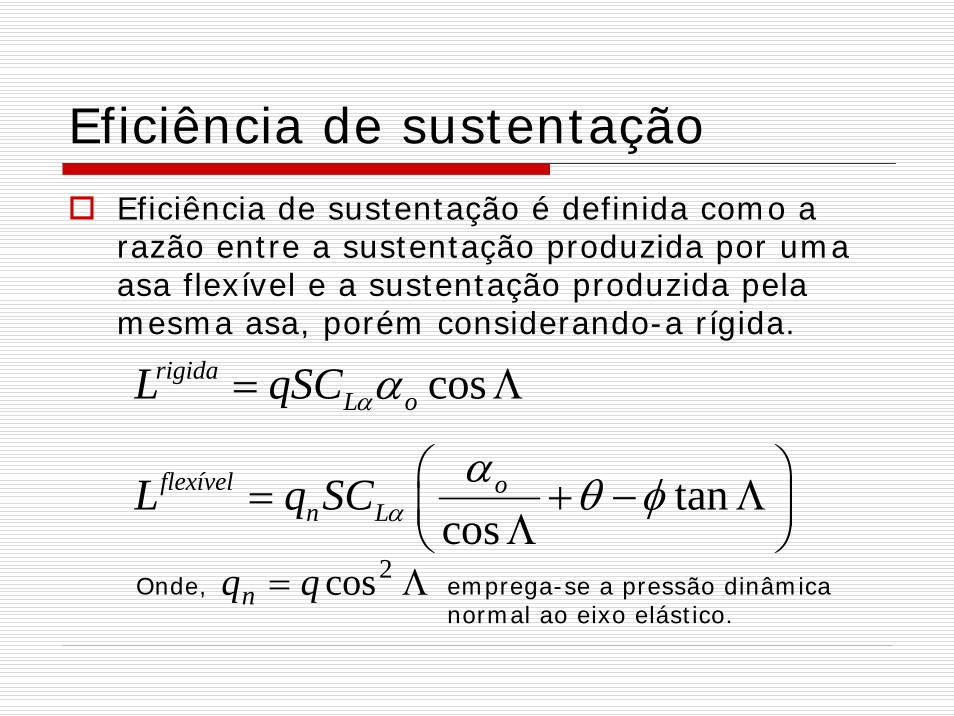
Eficiência de sustentaçãoEficiência de sustentação é definida como a razão entre a sustentação produzida por uma asa flexível e a sustentação produzida pela mesma asa, porém considerando-a rígida.
cosrigidaL oL qSC αα= Λ
tancos
flexível on LL q SC α
α θ φ⎛ ⎞= + − Λ⎜ ⎟Λ⎝ ⎠Λ= 2cosqqnOnde, emprega-se a pressão dinâmica
normal ao eixo elástico.
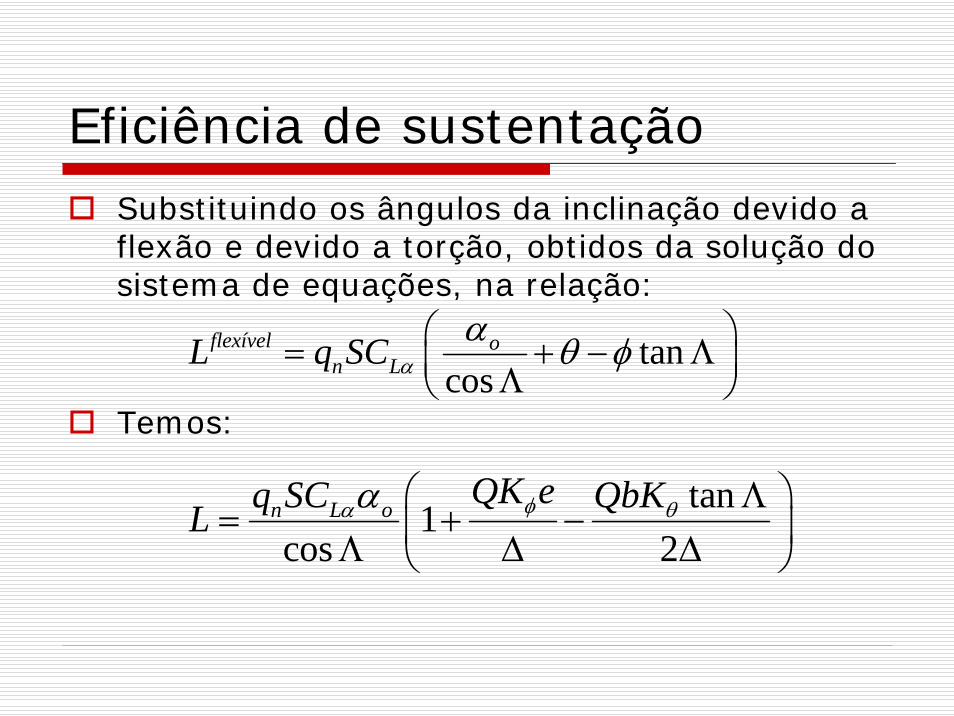
Eficiência de sustentaçãoSubstituindo os ângulos da inclinação devido a flexão e devido a torção, obtidos da solução do sistema de equações, na relação:
Temos:
tancos
flexível on LL q SC α
α θ φ⎛ ⎞= + − Λ⎜ ⎟Λ⎝ ⎠
tan1cos 2
n L o QK eq SC QbKL φα θα ⎛ ⎞Λ= + −⎜ ⎟Λ Δ Δ⎝ ⎠
Sustentação da asa flexível
1costan12
L oL qSCQ bK K e
K K
α
θ φθ φ
α
⎛ ⎞⎜ ⎟⎜ ⎟= Λ⎜ ⎟Λ⎛ ⎞+ −⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
2tan Λ
−=
bKeK
KKQD
θφ
θφ
n lQ q Scα
=Fazendo:
Eficiência da sustentação
D
oo
qSaL
−
Λ=
1
cosα
1cos 1
flexível
rígidoo o
D
L LqqSa L
qα
= =Λ −
2tan Λ
−=
bKeK
KKQD
θφ
θφ
n LQ q SC α=
Onde:
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ Λ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛−Λ
=
2tan1cos2
φ
θ
θ
KK
eb
SeaK
q oD
Exemplo Numérico
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛ Λ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛
⎟⎠⎞
⎜⎝⎛−Λ
=
2tan1cos2
0
φ
θ
KK
ec
cb
qqD
2/250 ftlbqo =
o30=Λ
Sendo as condições:
6=cb
1.0=ce
3=θ
φ
KK

Eficiência de sustentação - final
3503002502001501005000.0
0.5
1.0
1.5
2.0
lift effectiveness vs.dynamic pressure
dynamic pressure (psf)
lift e
ffect
iven
ess unswept wing
divergence
30 degrees sweep
15 degrees sweep
unswept wing







