1
Sterowanie ciągłe
Teoria sterowania układów
jednowymiarowych
Akademia
Górniczo-Hutnicza
im. Stanisława Staszica
w Krakowie
2
Sterowanie ciągłe
Wykład Laboratorium
dr inż. Iwona Oprzędkiewicz
B3, Ip., pok. 108/7
Konsultacje: środa 11.15-12.45
tel. 0-12-617-37-89
dr inż. Iwona Oprzędkiewicz
B3, Ip., pok. 108/7
Konsultacje: środa 11.15-12.45
tel. 0-12-617-37-89
Informacja o prowadzących zajęciaStudia stacjonarne rok II Automatyka i Robotyka

Wprowadzenie :
Jaką wiedzę powinna mieć osoba, która ma zaprojektować i przeprowadzić
automatyzację:
1. Wiedząc, jakie zadania system sterowania ma spełniać, powinna znać rodzaje
układów regulacji i umieć wybrać najodpowiedniejszy do realizacji zadania
2. Powinna umieć opracować uproszczony model (matematyczny) danego
procesu i przeprowadzić na nim wstępną analizę poprawności swojej koncepcji
(symulacja działania np. w pakiecie Matlab, LabVIEW itp).
• Zalety:
• Nisko kosztowa możliwość zbadania zachowania się samego procesu i
proponowanego układu regulacji przy dowolnych wymuszeniach, przy
zastosowaniu różnych metod korekcji , także w sytuacjach awaryjnych
(zabezpieczenie przed nietrafionymi zakupami elementów).
• Nie ma ryzyka zniszczenia rzeczywistej aparatury (często ogromne koszty).
• Interfejs użytkownika można opracować w oparciu o zbudowany model (np. w
Intouch)
Wprowadzenie:• Dwa sposoby zbudowania modelu matematycznego badanego obiektu
rzeczywistego:
• Na podstawie specjalistycznej wiedzy z danej dziedziny o zachodzących w
obiekcie procesach i wykorzystując aparat matematyczny do ich opisu
(głównie równania różniczkowe zupełne i cząstkowe).
• Na podstawie wykonanych pomiarów obiektu rzeczywistego
(charakterystyki statyczne i dynamiczne interesujących wielkości)
przeprowadza się identyfikację badanego obiektu przybliżając go prostym
modelem zastępczym. Metoda ta wymaga wiedzy z identyfikacji obiektów:
jaki model wystarczająco przybliży analizowany obiekt i w jaki sposób
dobrać (obliczyć) parametry wybranego modelu oraz umiejętności
przeprowadzania pomiarów istotnych w rzeczywistym układzie wielkości
(temperatury, ciśnienia, przepływów itp.).
• - dobór odpowiednich czujników, mierników i rejestratorów (orientować się
w producentach elementów do systemów sterowania dla danego
zastosowania)
• - identyfikacja procesu na podstawie wykonanych pomiarów

Wprowadzenie :
3. Po przeprowadzeniu analizy badanego obiektu:
• a) sformułować wymagania stawiane układowi regulacji (np. bezbłędne
odwzorowanie regulowanej wielkości z wejścia na wyjściu, krótki czas
ustabilizowania się danej wielkości itp.)
• b) wybrać rodzaj korekcji (w zależności, czy regulujemy proces, w którym
występują opóźnienia, czy nie). W najprostszym wypadku wybór typu
regulatora
• c) wybrać metodę doboru nastaw (parametrów ) regulatora
4. Przeprowadzić analizę otrzymanego (skorygowanego) układu
5. Wdrożyć zaprojektowany układ sterowania (ewentualne korekcja np.
parametrów regulatora).
6
Wymagany materiał z Matematyki
i Podstaw Automatyki
dla zagadnień
„Teorii układów jednowymiarowych”
• Liczby zespolone: ich zapis, interpretacja ge-
ometryczna, działania na liczbach.
• Proste i odwrotne przekształcenie Laplace’a oraz
jego zastosowanie do rozwiązywania równań
różniczkowych.
• Klasyfikacja układów automatycznego sterowania.

7
• Modele matematyczne członów i układów stero-
wania, funkcja przejścia i sposoby jej zapisu,
klasyfikacja podstawowych członów i układów
automatyki.
• Charakterystyki czasowe podstawowych członów,
zwłaszcza przy skokowym sygnale wymuszającym.
• Charakterystyki częstotliwościowe członów i ukła-
dów, w szczególności amplitudowo-fazowe oraz
logarytmiczne amplitudowe i fazowe.
• Ilustracja modeli matematycznych członów i układów
za pomocą schematów blokowych, zasady prze-
kształcania schematów blokowych.
• Stabilność układów regulacji – pojęcie stabilności i
stosowane kryteria.

8
http://home.agh.edu.pl/~tst
Zakładki:
• Aktualności
• Przedmiot
• Laboratorium
• Studenci
Informacja o przedmiocie i zajęciach

9
Harmonogram laboratorium
Lp Data Sale 20A i 20B B4
Pn.
930-11
Pn.
11-1230
Wt.
8-930
Wt.
930-11
Wt.
11-1230
Wt.
1230-14
Śr.
13-1430
Śr.
1430-16
Numer ćwiczenia - temat
1. 24/25/26.02 Zajęcia wstępne
2. 4/5/6.03 1 - Badanie zapasu stabilności w układach regulacji.
3. 11/12/13.03. 2 - Własności eksploatacyjne układów regulacji.
4. 18/19/20.03. 3 - Miejsca geometryczne pierwiastków równania charakterystycznego
5. 25/26/27.03. 4 - Badanie statycznych i astatycznych układów regulacji.
6. 1/2/3.04. 5 - Badanie właściwości regulatorów liniowych.
7. 10.04. Kolokwium (ćw.: 1,2,3,4,5) w godzinach wykładu
8. 15/16/17.04. 7 - Synteza parametryczna układów regulacji .
9. 24/29/30.04. 6 - Charakterystyki wybranych obiektów regulacji z opóźnieniem
skupionym.
10. 6/7/8.05. 8 - Stabilność układów z opóźnieniem i krytyczny czas opóźnienia.
11. 13/14/15.05. 9 - Wyznaczanie charakterystyk statycznych członów nieliniowych.
12. 20/21/22.05. 10 - Badanie wybranych układów nieliniowych.
13. 29.05 Kolokwium( ćw.:6,7,8,9,10) w godzinach wykładu
14. 5.06. Kolokwium poprawkowe – s.100 B2 godz. 11:15
10
Warunki zaliczenia laboratorium• Przed zajęciami laboratoryjnymi należy zapoznać się
z teorią związaną z ćwiczeniem. Zawsze na stronieprzedmiotu (w zakładce Przedmiot -> Wykłady) przeddanym ćwiczeniem dostępny jest wykład związany zjego tematyką.
• Dopuszczalna jest maksymalnie jedna nieobecnośćna laboratorium w trakcie semestru (pozostałe należyodrobić z innymi grupami w miarę wolnych miejsc).
• Każde ćwiczenie wymaga oddania i zaliczeniasprawozdania (chyba, że prowadzący zadecydujeinaczej).
• Warunkiem koniecznym uzyskania zaliczenia jestotrzymanie pozytywnych ocen z kolokwiów orazrozliczenie się ze sprawozdań.

11
Warunki zaliczenia laboratorium• Na kolokwium poprawkowym można
poprawiać wyłącznie oceny negatywne.
• Na kolokwium poprawkowym możnapoprawiać jedno kolokwium lub obydwa.
• Przewidziane są dwa terminy kolokwiówpoprawkowych: jeden w czerwcu (5.06.2019) ijeden we wrześniu 6.09.2019 (piątek) godz. 17B2 s.100 (ewentualnie w czerwcu dla osób,które rezygnują z możliwości poprawy wewrześniu. Takie osoby muszą się do mniezgłosić najpóźniej dzień po ogłoszeniuwyników z pierwszego kolokwiumpoprawkowego).

Regulamin Laboratorium
Podstaw Automatyki
12
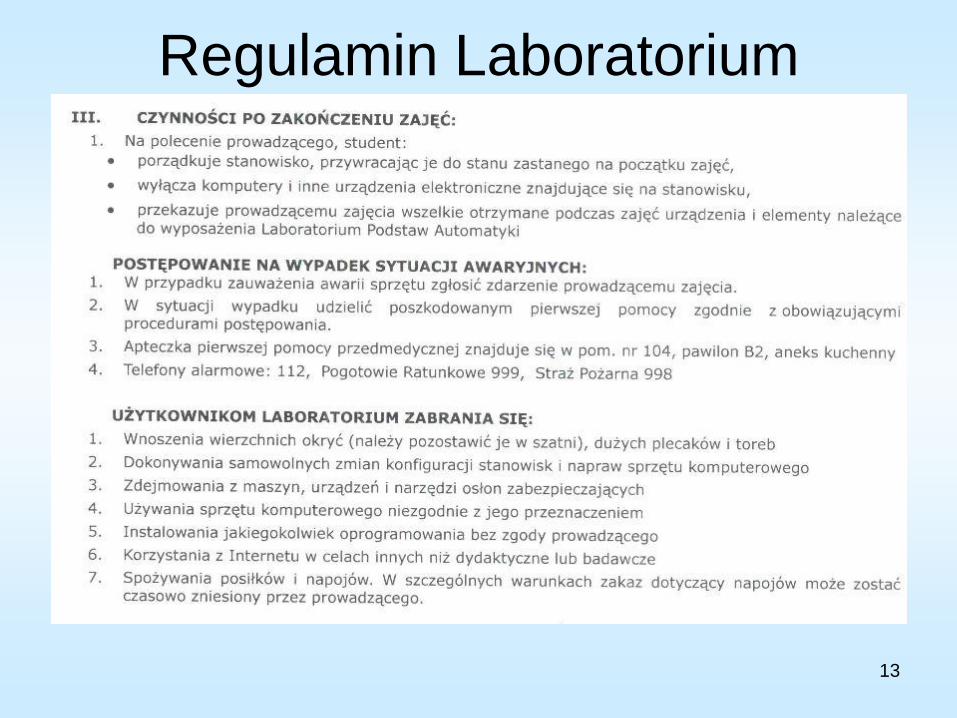
Regulamin Laboratorium
Podstaw Automatyki
13
14
Zasady ogólne
• Wykłady są nieobowiązkowe, ale wszystkiezagadnienia omawiane na wykładach obowiązują naegzaminie.
• PDF’y prezentacji z wykładów (zwykle nie zawierającewszystkich przykładów omówionych na wykładzie ipraktycznych wskazówek przydatnych podczaswykonywania ćwiczeń laboratoryjnych) będąudostępnione na stronie przedmiotu.
• Istnieje możliwość zdawania egzaminu w terminiezerowym przy zaliczeniu laboratoriów co najmniej na4.0 w pierwszym terminie. Egzamin będzie pisemny iodbędzie się na ostatnim wykładzie 5. czerwca 2019w B2 s.100 godz. 9:30.

15
Zasady ogólne
• Warunkiem przystąpienia do egzaminuw kolejnych terminach jest uzyskaniezaliczenia z laboratorium.
• Egzaminy są pisemne i obejmują
tematykę z wykładów i ćwiczeń.
• Zagadnienia obowiązujące na egzaminie
podane są na stronie przedmiotu.
• Ocena końcowa z przedmiotu jest
średnią arytmetyczną z ocen
cząstkowych tzn. egzaminów i zaliczenia.

16
Zasady ogólne
• Terminy egzaminów:
• I termin: 18.06.2019r.(wtorek) B2 s.100godz. 10:00
• II termin: 25.06.2019r.(wtorek) B2 s.100godz. 10:00
• III termin: 9.09.2019r.(poniedziałek) B2s.100 godz. 10:00
Regulamin studiów §15 pkt. 8
oraz §16 pkt.20„Jeżeli prowadzący zajęcia stwierdzi
niesamodzielność pracy studenta….. Student
otrzymuje ocenę niedostateczną… i traci prawo
do poprawkowego egzaminu (zaliczenia), co
skutkuje niezaliczeniem całego przedmiotu….
Prowadzący ma obowiązek niezwłocznie
zawiadomić o tym fakcie Dziekana. Student ma
prawo złożyć odwołanie w terminie 7 dni od dnia
poinformowania go o stwierdzeniu
niesamodzielności jego pracy.”
17

18
Sprawozdanie z ćwiczenia powinno
mieć formę pisemną i zawierać:
• Imiona, nazwiska i numer grupywykonawców;
• Przedmiot, temat, numer ćwiczenia idatę wykonania;
• Cel ćwiczenia;

19
Sprawozdanie z ćwiczenia powinno
zawierać:• Przebieg ćwiczenia: schematy układów,
otrzymane (czytelne) przebiegi zzaznaczonymi odczytywanymiwartościami (legendę oznaczeń), wzory,kompletne obliczenia, tabele zwynikami.
• Wnioski;

20
Literatura podstawowa
do „Teorii układów
jednowymiarowych”

21
Inna literatura:• Potvin A.F.: Nonlinear Control Design
Toolbox. The Math Works, Inc. 1994.
• Górecki H.: Analiza i synteza układówregulacji z opóźnieniem. WNT, Warszawa1971.
• Kaczorek T.: Podstawy teorii sterowania.WNT 2005
• Inne książki prof. Kaczorka
• Pełczewski W.: Teoria sterowania. WNT, Warszawa 1980.

22
Inna literatura:• Advances in Fractional Calculus edited by
J. Sabatier. Springer 2007
• J.H.Mathews, K.D. Fink: NumericalMethods Using Matlab. Pearson 2004
• Pratap Rudra: Matlab7 dla naukowców i inżynierów. PWN 2010
• Holly Moore: Matlab for engineers. (2011)

23
Część I – UKŁADY LINIOWE
UKŁADY
JEDNOWYMIAROWE
24
Rozpatrywane będą układy o jednym sygnale
wejściowym i jednym sygnale wyjściowym,
nazywane inaczej układami jednowymiarowymi lub
układami o jednym wejściu i jednym wyjściu,
inaczej SISO (ang. Single Input, Single Output).
1. Wprowadzenie do
części I

25
Rys. 1.1. Ogólny schemat blokowy układu regulacji
w t( ) ε( )tRegulator
u t( ) Obiektregulacji
z tu( ) . . . . . z ty( )
y t( )
Członpomiarowy
–
v t( )

26
Sygnały występujące w układzie:
w(t) – sygnał wejściowy,
ε(t) – sygnał uchybu,
u(t) – sygnał wyjściowy z regulatora(sterujący),
y(t) – sygnał wyjściowy układu,
v(t) – sygnał sprzężenia zwrotnego,
zu(t), …, zy(t) – sygnały zakłócające.
Człony występujące w układzie:
- obiekt regulacji, opisany funkcją przejścia
- regulator, opisany funkcją przejścia
- człon pomiarowy, opisany funkcją przejścia
)(sGo
)(sGr
)(sH

27
Przykład 1.1
Rys. 1.2. Ogólny schemat blokowy jednowymiarowego
układu regulacji z funkcjami przejścia
W s( ) E s( )G sr( )
U s( )–
Z su( )
G so ( )
–
Z sy ( )
Y s( )
H s( )V s( )
–
28
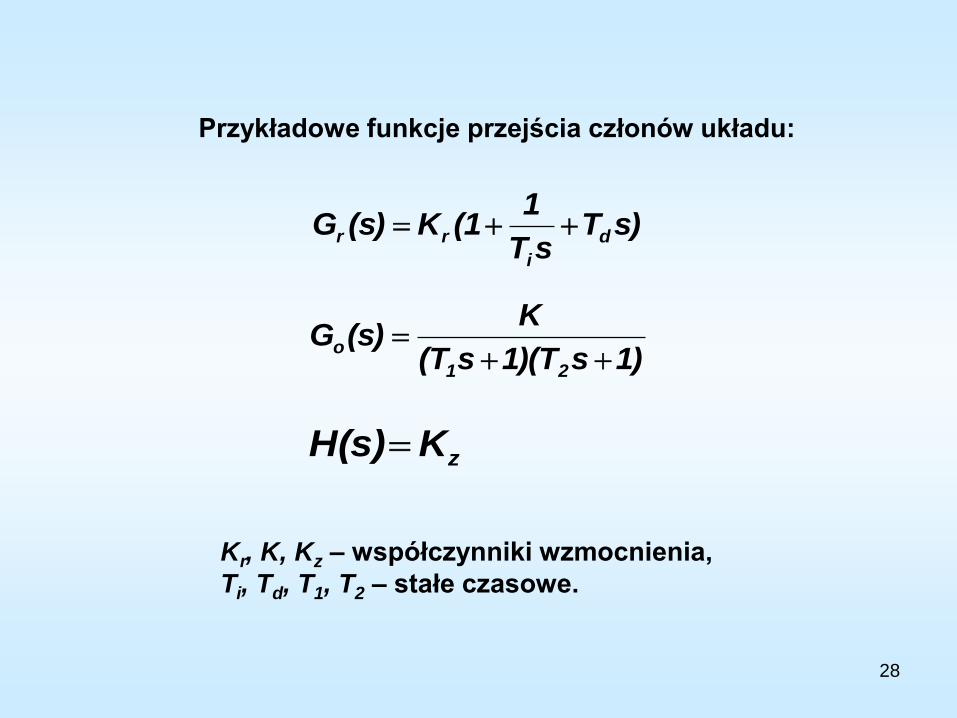
Przykładowe funkcje przejścia członów układu:
s)TsT
1(1K(s)G d
i
rr
1)s1)(Ts(T
K(s)G
21
o
zKH(s)
Kr, K, Kz – współczynniki wzmocnienia,
Ti, Td, T1, T2 – stałe czasowe.

29
Rys. 1.3. Szczegółowy schemat blokowy jednowymiarowego
układu regulacji z funkcjami przejścia
W s( )Kr 1+
1T si+T s d
U s( )–
Z su( )
KT s T s( +1)( +1)1 2
–
Z sy( )
Y s( )
Kz
–
V s( )
W s( )Kr 1+
1T si+T s d
U s( )–
Z su( )
KT s T s( +1)( +1)1 2
–
Z sy( )
Y s( )
–
V s( )
W s( )Kr 1+
1T si+T s d
U s( )–
Z su( )
–
Z sy( )
Y s( )
–
V s( )
W s( ) U s( )–
Z su( )
–
Z sy( )
Y s( )
–
V s( )

30
W liniowych modelach matematycznych posługujemy się trans-
mitancjami członów i układów. Dla przypomnienia:
1. Równanie algebraiczne liniowe ma postać
)t(uK)t(y
Stąd otrzymujemy transmitancję
K)s(U
)s(Y)s(G
)t(uK)t(y1dt
)t(dyT
2. Równanie różniczkowe liniowe zwyczajne
1sT
K
)s(U
)s(Y)s(G
Stąd otrzymujemy transmitancję

31
3. Równania algebraiczne nieliniowe mają przykładowe postacie
2)]t(u[K)t(y
)t(uK)t(y
)t(uK)t(y
4. Równania różniczkowe nieliniowe zwyczajne
)t(uK)t(y1dt
)t(dyT
2
)t(uK)]t(y[1)t(ydt
)t(dyT 3

32
Funkcja przejścia toru głównego
Funkcja przejścia w układzie otwartym (układu otwartego)
Funkcja przejścia układu zamkniętego
(s)(s)GGE(s)
Y(s)G(s) or
Według rys. 1.2. i dla Zu(s) = Zy(s) = 0 definiujemy:
(s)H(s)(s)GGE(s)
V(s)H(s)G(s) or
(s)(s)GH(s)G1
(s)(s)GG
H(s)G(s)1
G(s)
W(s)
Y(s)(s)G
or
orz

33
Równanie charakterystyczne układu zamkniętego (RCH)
• w postaci ogólnej
• po rozpisaniu
• po przekształceniach algebraicznych
0asa...sasa 01
1n
1n
n
n
0H(s)G(s)1
0(s)(s)GH(s)G1 or
34
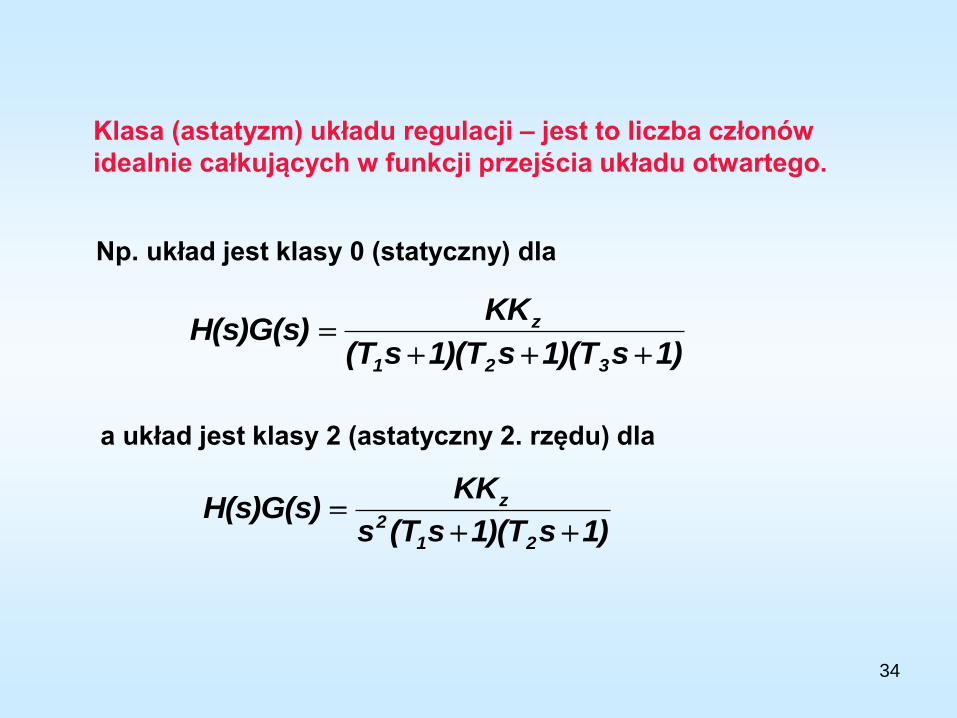
Klasa (astatyzm) układu regulacji – jest to liczba członów
idealnie całkujących w funkcji przejścia układu otwartego.
Np. układ jest klasy 0 (statyczny) dla
a układ jest klasy 2 (astatyczny 2. rzędu) dla
1)s1)(Ts1)(Ts(T
KKH(s)G(s)
321
z
1)s1)(Ts(Ts
KKH(s)G(s)
21
2
z

35
Przykład 1.2
rr K(s)G
Napisać równanie charakterystyczne (RCH) układu zamkniętego i
wyznaczyć jego współczynniki a0, a1, a2, a3, dla danych:
1)s1)(Tss(T
K(s)G
21
o
zKH(s)
36
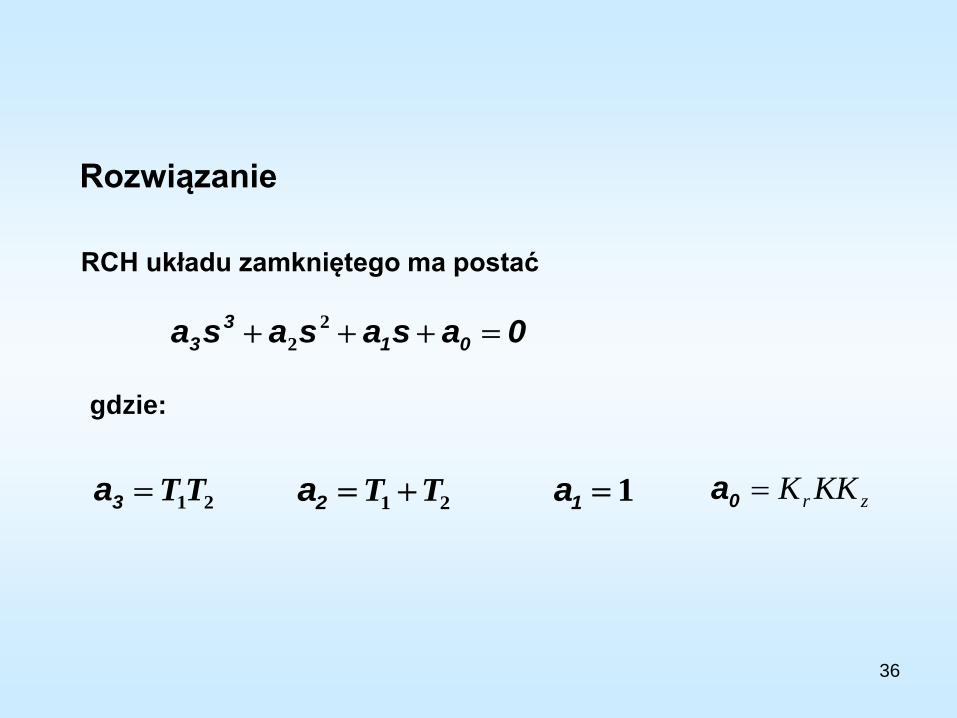
Rozwiązanie
RCH układu zamkniętego ma postać
0asasasa 01
3
3 2
2
21TT3a21 TT 2a 11a zr KKK0a
gdzie:

Ćwiczenie nr 1 (4/5/6.03.2019 r.)
• Pierwsze ćwiczenia laboratoryjne dotyczą
badania zapasów stabilności układów
regulacji. Proszę zapoznać się z instrukcją
(http://home.agh.edu.pl/~tst/cw/Ins1_Mech
.pdf ) i przygotować się do wykonania
ćwiczenia korzystając z wykładu
(http://home.agh.edu.pl/~tst/SC_zap_stab
2019.pdf)
37

38
Cdn.
Dziękuję za uwagę.







