
5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 1/28
TRANSFORMADA DE LAPLACE TRANSFORMADA DE LAPLACE
Introdução
Transformada de Laplace
Controle de Sistemas Mecânicos
Transformada Inversa de Laplace
Definição da Função de Transferência
Resposta ao impulso e FT
Solução de equações diferenciais usando TL

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 2/28
Definição da Transformada de Laplace Definição da Transformada de Laplace
A transformada de Laplace de uma função causal é dada por:
∞−
==st
Controle de Sistemas Mecânicos
onde s=σσσσ+jωωωω é a variável livre que assume valores no plano complexo. Observe que o
limite inferior inclui qualquer descontinuidade que ocorra no instante t = 0.
−
0

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 3/28
Exemplo 5.1: TL da exponencial Exemplo 5.1: TL da exponencial
Calcular para [ ])(t f L jcbaet f
at
+==
−
)(
∞
+−
∞
−−−===
)( t asst at at
Controle de Sistemas Mecânicos
00
[ ] asaseassF
t as
+=−
+
−=
+
−=
∞
+− 1
10
11
)(0
)(

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 4/28
Exemplo 5.2: TL do degrau unitário Exemplo 5.2: TL do degrau unitário
Calcular para a função degrau
[ ])(t u L
≤
= ≤
=−
0 se 0
0 se 0)( 0
t t t u t
Controle de Sistemas Mecânicos
[ ]ss
e LsF t 1
0
1)(
0=
+==
−
ssF
1)( =

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 5/28
Linearidade Linearidade
P1: A transformada de Laplace é um operador
linear
Controle de Sistemas Mecânicos
22112211 t t t t +=+
[ ] )()()()( 22112211 sF sF t f t f L +=+

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 6/28
Exemplo 5.3: TL da cossenóide Exemplo 5.3: TL da cossenóide
Calcular para
[ ])(t f L t t f cos)(=
[ ]t jt j eet ω ω
ω −
+=2
1cos
+=−
)(2
1][cos
t jt jee Lt L
ω ω ω
Controle de Sistemas Mecânicos
[ ])()(2
1)(
t jt je Le LsF
ω ω −+=
22)(
ω +=sssF
++
−=
ω ω js jssF
11
2
1)(

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 7/28
Exemplo 5.4: TL do impulso unitário Exemplo 5.4: TL do impulso unitário
Calcular para a função impulso
unitário [ ])(t L
<
0 se 0 t 01 t
)(t f
)(lim)( t f t =δ
Controle de Sistemas Mecânicos
>
=
0
00
se 0
t t t
0
[ ] dt et f t f Lt LsF st t t
−
∞
→→ ∫ =
==
000
)(lim)(lim)()(00
δ

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 8/28
Continuação Continuação
−=
−=
−
−
00 111 est t
st
dt et
dt et f sF st
t
t
st
t
−
→
−
∞
→ ∫ ∫ ==
0
000 0
00
01lim)(lim)(
Controle de Sistemas Mecânicos
→→
00
000
00 st st t t
1lim1
lim0
0
0
0 00
0=⇒
−−
→
−
→ s
se
st
est
t
st
t
Aplicando
L’Hôpital:
[ ] 1)( =t L

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 9/28
Transformada da derivada Transformada da derivada
P2:Diferenciação real (com relação à variável t )
)0()()( −−=
f ssF dt t df L
− in
Controle de Sistemas Mecânicos
generazando −= ==
−−
∑ 00
1
)(t
ii
inn
ndt ssF sdt L
quando todas as
condições
iniciais são nulas
)()(
sF sdt
t f d L n
n
n
=

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 10/28
Transformada da integral Transformada da integral
P3:Integração real
[ ] )(1
)(1
)( −= dt t f sF dt t f L
Controle de Sistemas Mecânicos
0=t ss
quando todas as
condições
iniciais são nulas [ ] ssF dt t f L )()( =∫

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 11/28
Teorema do valor final Teorema do valor final
P4:Valor Final
[ ] )()( sF t f L =sedt
df L
e se
Controle de Sistemas Mecânicos
)(lim
m
0sF s
s
t
→
∞→ex stem
)(lim)(lim 0 sF st f st →∞→=

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 12/28
Teorema do valor inicial Teorema do valor inicial
P5:Valor Inicial
[ ] )()( sF t f L =sedt df L
e se
existe
m
Controle de Sistemas Mecânicos
s ∞→
)(lim)(lim0
sF st f st ∞→→
=+

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 13/28
Translação no tempo Translação no tempo
P6:Translação Real ( u(t) é o degrau unitário)
Se existe a TL F(s) de uma função f(t)
Controle de Sistemas Mecânicos
)()()( sF eT t uT t f L−
=−−
t
)()( T t uT t f −−
)(t f
T

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 14/28
Funções periódicas Funções periódicas
P7:Funções Periódicas
)(t f função periódica
de período T
)(t f
Controle de Sistemas Mecânicos
onde
)(1)( 1 sF et f L sT −−=
[ ])()(
11 t f LsF =
primeiro período de f(t)
)(1 t f
)(1 t f
)(t f

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 15/28
Diferenciação na freqüência Diferenciação na freqüência
P8:Diferenciação complexa
Se existe a TL F(s) de uma função f(t)
Controle de Sistemas Mecânicos
[ ] )()( sF ds
d t f t L −=
quando todas as condições iniciais são nulas

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 16/28
Integração na freqüência Integração na freqüência
P9:Integração complexa
Se existe a TL F(s) de uma função f(t) e dssF s
∫ ∞
∃ )(
Controle de Sistemas Mecânicos
σ σ d F
t
t f L
s
∫ ∞
=
)(
)(

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 17/28
Convolução no tempo Convolução no tempo
P10:Transformada da convolução no tempo
∫ −==t
d t g f t gt f t h0
)()()(*)()( τ τ τ
Controle de Sistemas Mecânicos
∫ =−t
sGsF d t g f L0
)()(])()([ τ τ τ
[ ] )()( sF t f L =
se
[ ] )()( sGt g L =

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 18/28
Exemplo 5.5: TL da função dente de serra Exemplo 5.5: TL da função dente de serra
T
)(t f
t
A
)(1t f
Controle de Sistemas Mecânicos
)(1t f
t T
A
t T t T
A− −
)(t ut T A )()( T t uT t
T A −− )( T t u A
−
)()()()()(1 T t u AT t uT t T
At ut
T
At f −−−−−=
Primeir
o
período

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 19/28
Continuação Exemplo 5.5 da TL Continuação Exemplo 5.5 da TL
[ ] [ ] [ ] [ ]{ })()()()()()( 11T t uT LT t uT t Lt ut L
T
At f LsF −−−−−==
[ ])()()()()(1 T t uT T t uT t t ut
T
At f −−−−−=
Controle de Sistemas Mecânicos
[ ]2
11)(
ssds
d t ut L =
−=
[ ] 2
1
)]([)()( set tu LeT t uT t L
sT sT −−==−−
[ ]s
eT sU TeT t Tu LsT
sT −
−==− )()(

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 20/28
Continuação Exemplo 5.5 da TL Continuação Exemplo 5.5 da TL
−−=
−
−
seT
se
sT AsF
sT
sT
22111)(
Controle de Sistemas Mecânicos
)(1
1)( 1 sF e
sF sT −
−=
−
−−=−
−
sT
sT
eeTs
Ts AsF
1)1(1)(
2

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 21/28
TLI : Etapas para o cálculo TLI : Etapas para o cálculo
1) desenvolver X(s) em frações parciais
Encontrar asraízes de D(s)
Escrever polinômiona forma fatorada
)()(
s N s X =
)(
)()(s D
s N s X =
Controle de Sistemas Mecânicos
montar polinômios de grau 1 ou 2)(s pi
21 nr sr sr s −−− K
)()()(
)(
2
2
1
1
n
n
r s
C
r s
C
r s
C s X
−++
−+
−= L
calcular as constantes iC
2) Calcular a transformada inversa de cada termo

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 22/28
Exemplo de raízes simples usando Exemplo de raízes simples usando
MATLAB MATLAB
Encontrar a TIL da expressão abaixo.
8484)(22
++=
++==
sssss N
Controle de Sistemas Mecânicos
Método: separar em frações parciais
Sem MatLab calcular as co nstantes
Com MatLab usar o comando residue
)3)(2)(1(6116)(
23++++++sssssss D
5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 23/28
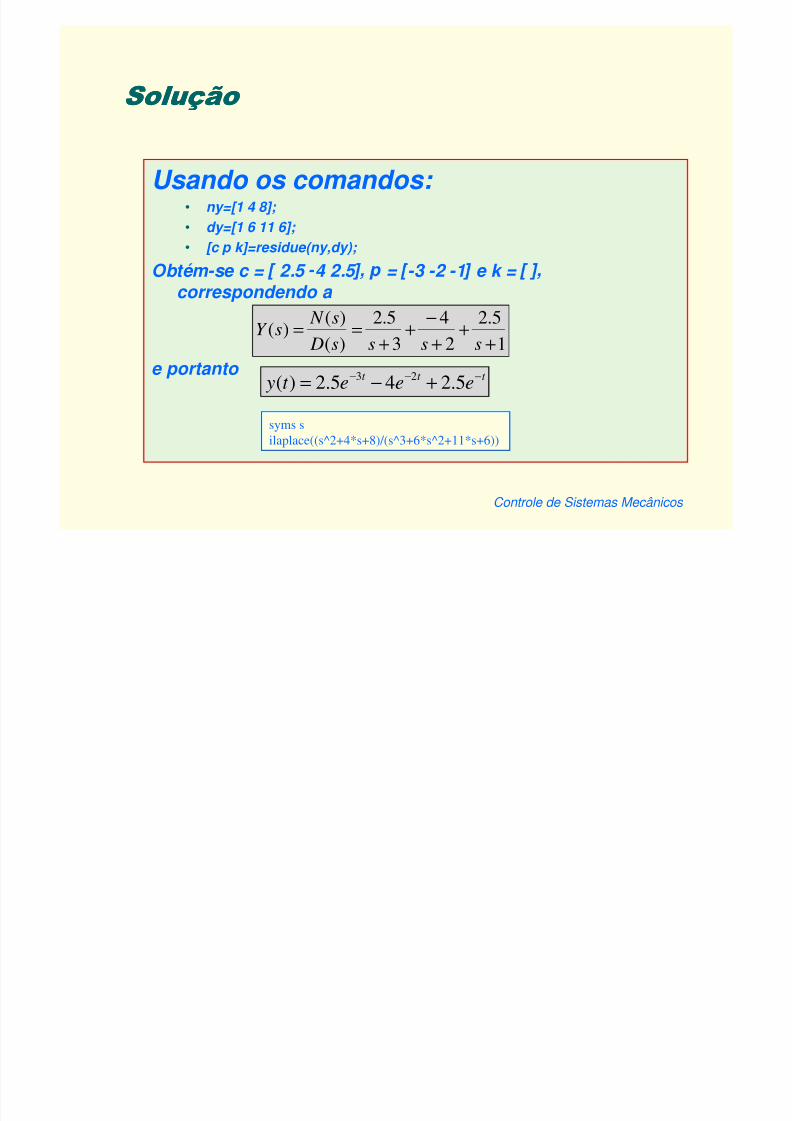
Solução Solução
Usando os comandos: • ny=[1 4 8];
• dy=[1 6 11 6];
• [c p k]=residue(ny,dy);
Obtém-se c = 2.5 -4 2.5 = -3 -2 -1 e k =
Controle de Sistemas Mecânicos
correspondendo a
e portanto
1
5.2
2
4
3
5.2
)(
)()(
++
+
−+
+==
ssss D
s N sY
t t t eeet y −−−
+−= 5.245.2)(23
syms s
ilaplace((s^2+4*s+8)/(s^3+6*s^2+11*s+6))

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 24/28
Solução de equações diferenciais Solução de equações diferenciais
A Transformada de Laplace facilita a solução de
equações diferencias
O resultado obtido é a solução completa
Controle de Sistemas Mecânicos
O método consiste em três passos:
• Aplica a propriedade da TL da E.D.
• Decompõe a expressão resultante em termos simples
• Calcula a transformada inversa

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 25/28
Exemplo de equação de 2a. ordem Exemplo de equação de 2a. ordem
Encontrar a solução da equação abaixo:
3)0(
0372
=
=++
x
x x x &&&
Controle de Sistemas Mecânicos
Usando:
0)0( = x&
[ ] )0()0()(
)0()(
)(
x xssX s x
xssX x
s X x
L
L
L
&&&
&
−− →
− →
→

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 26/28
Solução Solução
Aplicando Laplace:
Substituindo as condições iniciais:
0)(3)0(7)(7)0(2)0(2)(2 2 =+−+−− s X xssX sx xs X s &
2
Controle de Sistemas Mecânicos
Separando em frações parciais:
Encontrando a transformada inversa:
3
6.0
5.0
6.3)(
+−
+=
sss X
t t eet x 35.0
6.06.3)(−−
−=
372
)(2 ++
=
ss
s X
( )( )35.0
216)(
++
+=
ss
ss X

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 27/28
Transformada de Laplace SSO Transformada de Laplace SSO
Da equação abaixo:
0)0(
0012
=
=++
y
ub ya ya ya &&&
Controle de Sistemas Mecânicos
Calculando a TL:
0)0( = y&
[ ] )0()0()(
)0()(
y yssY s y
yssY y
L
L
&&&
&
−− →
− →
Lembrando Lembrando

5/7/2018 Apostila Controle - 02 - Transformada de Laplace - slidepdf.com
http://slidepdf.com/reader/full/apostila-controle-02-transformada-de-laplace 28/28
Referência Referência
Transformada de Laplace
Ogata Capítulo 2
Controle de Sistemas Mecânicos







