
Répuplique Algérien démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
Université de Tébessa
Faculté des Sciences et de la Technologie
Département de Génie Civil
Mémoire de Master Académique
Option : Structures
Promotion : 2015/2016
Présenté et soutenu publiquement le 21-05-2016 devant le Jury, composé de :
Président :
Rapporteur : Mohamed Rédha Soltani
Examinateurs :
Bibliographie sur les assemblages
boulonnées par platine d’about
Hadhoud Amira

Avant tout avancement sur ce travail personnel, il apparait de
commencer ce rapport par des remerciements à ceux qui m’ont aidé
pendant ce travail.
Je remercie mon enseignant encadreur Soltani Mohamed Rédha pour
son gentillesse, mes amis qui m’ont aidé et accompagné tout au long de
cette expérience personnelle avec beaucoup de patience, à tout mes
enseignants durant mon cycle universitaire.
Dédicaces Je dédie ce modeste travail à :
Ma mère pour sa tendresse, sa patience et ses encouragements. Je les remercie pour leur confiance et « que Dieu leur accordent une très longue
vie ».
Mon très cher frère, et ma chère sœur en connaissance de tous les sacrifices, les efforts, l’amour et la gentillesse qu’il m’a toujours apportée.
Mes chères amies ainsi que toutes promos mastères et A toute personne qui me connaisse.

i
Table de matière
Dédicaces
Table des matières i
Liste des figures iii
Liste de tableaux vi
Résumé v
Introduction Générale 1
Chapitre 1 : Généralités sur les assemblages 3
1.1 Introduction 3
1.2. Définition et rôle d’un assemblage 4
1.3. Différentes formes d’assemblages métalliques 5
1.4. Modes d’assemblage 6
1.4.1. Les assemblages boulonnés 6
1.4.1.1. Le rivetage 6
1.4.1.1.1. Rivets à anneau 7
1.4.1.2. Le boulonnage 7
1.4.2. Les assemblages soudés 9
1.4.3. Les assemblages chimiques (colles) 10
1.5. Fonctionnement des assemblages 10
1.5.1. Fonctionnement par obstacle 10
1.5.2. Fonctionnement par adhérence 11
1.5.3. Fonctionnement mixte 11
1.6. Configurations d'assemblages poutre-poteau 11
1.6.1. Assemblages poutre- poteau par platine d'about 11
1.6.2. Assemblage poteau-poutre par cornière d'âme et ou de semelle 13
1.6.3. Assemblages de continuité de poutres ou de poteaux 13
1.7. Renforcement d’assemblage 14
1.7.1. Les raidisseurs transversaux de poteau 15
1.7.2. Les renforcements par contre-plaques 15
1.7.3. Les doublures d'âme 15
1.8. Précautions constructives 18
1.9. Classification des assemblages selon l’Eurocode 3 18
1.10. Caractérisation du comportement des assemblages 19
1.11. Classification des assemblages métalliques 21
1.11.1. Classification des assemblages en rigidité 22
1.11.2. Classification des assemblages par la résistance 24
1.11.2.1. Assemblage à résistance complète 24
1.11.2.2. Assemblage à résistance partielle 25
1.11.2.3. Assemblage articulé 25
1.11.3. Classification des assemblages par capacité de rotation 25
1.12. Idéalisations des courbes Moment-Rotation de l'assemblage 27
1.13. Modélisation des assemblages en vue de l’analyse globale des structures 28
1.14. Modélisation des assemblages 30
1.15. Conclusion 31
32
32

ii
CHAPITRE 2 : Méthodes de caractérisation des assemblages boulonnés par platine
d’about
2 .1 Introduction 32
2.2. Les modèles empiriques 32
2.2.1. Modèles linéaires 33
2.2.2. Modèle polynôme de Frye et Morris 34
2.2.3. Modèle de Krishnamurthy 38
2.2.4. Modèle Kukreti 39
2.2.5. Modèle d’Abolmaali 40
2.3. Les modèles analytiques 44
2.4. Les modèles mécaniques 44
2.5. Approche de calcul des assemblages selon l’EC3 45
2.5.1. Caractérisation des assemblages 46
2.5.2. Rappel sur la formulation de la rigidité initiale de l’assemblage 48
2.5.3. Classification des assemblages 50
2.6. Modélisations numériques des assemblages 51
2.7. Conclusion 58
CHAPITRE 3 : Etude comparative entre des résultats expérimentaux et des
résultats issus de diverses méthodes empiriques et analytiques
59
3.1. Introduction 59
3.2. Essai d’Abidelah 59
3.2.1. Programme expérimental 59
3.2.2. Propriétés mécaniques des matériaux 65
3.2.3. Dispositif d’essai 66
3.3. Essais d’Aribert 68
3.3.1. Description des essais 68
3.3.2. Propriétés mécaniques des matériaux des essais 69
3.3.3. Dispositif d’essai 70
3.4. Essai d’Augusto 72
3.4.1. Description des essais 72
3.4.2. Propriétés mécaniques des matériaux 73
3.4.3. Dispositif d’essai 74
3.5. Essais de Coelho 75
3.5.1. Description des essais 75
3.5.2. Propriétés géométriques et mécaniques des matériaux des essais 77
3.5.4. Dispositif d’essai 77
3.6. Essais de Sherbourne 78
3.7. Comparaison entre les résultats expérimentaux avec ceux issus des modèles empiriques. 80
3.7.1. Comparaison avec les essais d’Abidellah 81
3.7.1.1. Spécimen FS1 81
3.7.1.2. Spécimen FS2 82
3.7.1.3. Spécimen FS3 83
3.7.1.4. Spécimen FS4 85
3.7.2. Comparaison avec les essais d’Aribert 86
3.7.3. Comparaison avec les essais d’Augusto 89
3.7.4. Comparaison avec les essais de Coelho 91
Conclusion générale 94

iii
Liste des figures
Chapitre 1: Généralités sur les assemblages
Figure.1.1 : Configurations d'assemblages dans le plan 4
Figure.1.2 : Définition de la zone d’attache et de l’assemblage (assemblage poteau-poutre) 5
Figure.1.3 : Différents types d’assemblages dans une structure métallique 6
Figure.1.4 : Rivet et rivet à anneau 7
Figure.1.5 : Boulon de charpente et boulon à haute résistance 9
Figure.1.6 : Assemblages soudés 10
Figure.1.7 : Assemblage poteau-poutre par platine d’about boulonnée 12
Figure.1.8 : Exemple d'assemblage tridimensionnel 12
Figure.1.9 : Assemblages poutre-poteau par cornières d'âme et/ou des semelles 13
Figure.1.10 : Assemblage de continuité de poutre 14
Figure.1.11 : Assemblage de continuité de poteau 14
Figure.1.12 : Moyens de renforcement des assemblages selon l'EN 1993-1-8 16
Figure.1.13 : Assemblages avec raidisseurs de platine d’about débordante 17
Figure.1.14 : Modélisation des assemblages métalliques 20
Figure.1.15 : Courbe moment-rotation d’un assemblage métallique 20
Figure.1.16 : Classification des assemblages 22
Figure.1.17 : Répartition élastique des moments fléchissant dans un portique simple 23
Figure.1.18 : Limites de classification de rigidité selon l’EN 1993-1-8 24
Figure.1.19 : Limites de la classification des assemblages par résistance 25
Figure.1.20 : Classification des assemblages selon la capacité de rotation 26
Figure.1.21 : Idéalisations des courbes moment-rotation des assemblages 27
Figure.1.22 : Modélisation d'un assemblage 30
Figure.1.23 : Modélisation simplifiée des assemblages 31
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnés par platine d’about
Figure.2.1 : Modèles linéaires M-r 34
Figure.2.2 : Définition des paramètres géométriques du polynôme de Frye- Morris dans le cas
d’un assemblage par platine d’about débordante
35
Figure.2.3 : Paramètres géométriques du modèle de krishnamurthy 39
Figure.2.4 : Paramètres géométriques utilisés pour le modèle de Kuekrti 40
Figure.2.5 : Modèle de Ramberg-Osgood proposé par Aboolmaali 41
Figure.2.6 : Modèle de puissance à trois paramètres 43
Figure.2.7 : Paramètres géométriques utilisés pour le modèle d’Abolmaali 44
Figure.2.8 : Modèle mécanique utilisé pour un assemblage par platine d’about débordante 45
Figure.2.9 : Composantes de base de l'assemblage par platine d’about boulonnée 47
Figure.2.10 : Modélisation de l’assemblage selon l’EN 1993-1-8 48
Figure.2.11 : Courbe de comportement «moment-rotation» d’un assemblage 50
Figure.2.12 : Classification des assemblages en fonction de leur rigidité 51
Figure.2.13 : Modélisation 2-D de Bahhari et sherbourne 54

iv
Figure.2.14 : Modélisation 3-D du tronçon en Té de Swanson et al 55
Figure.2.15 : Modèle numérique de Maggi et al 55
Figure.2.16 : Modèle numérique de Tagawa et Gurel 56
Figure.2.17 : Modèle numérique de Diaz 57
Figure.2.18 : numérique de Mohamedi-shooreh et Mofid 58
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus de
diverses méthodes empiriques et analytiques
Figure.3.1 : Configuration des différents spécimens testés 60
Figure.3.2 : Caractéristiques des assemblages 61
Figure.3.3 : Configuration de l'assemblage FS1 62
Figure.3.4 : Configuration de l'assemblage FS2 63
Figure.3.5 : Configuration de l'assemblage FS3 64
Figure.3.6 : Configuration de l'assemblage FS4 65
Figure.3.7 : Montage d’essai 66
Figure.3.8 : Vue de l’assemblage en vraie grandeur 67
Figure.3.9 : Instrumentation des spécimens testés 67
Figure.3.10 : Configuration générale des assemblages 68
Figure.3.11 : Dispositif d’essai 71
Figure.3.12 : Instruments de mesure 71
Figure.3.13 : Configuration générale des assemblages J1 et J2 72
Figure.3.14 : Configuration générale de l’assemblage J3 73
Figure.3.15 : Configuration générale de l’assemblage J4 73
Figure.3.16 : Dispositif d’essai et instruments de mesure 75
Figure.3.17 : Configuration des assemblages 76
Figure.3.18 : Caractéristiques géométrique des spécimens (dimensions en mm). 76
Figure.3.19 : Configuration des assemblages 78
Figure.3.20 : Dispositif d’essai 80
Figure.3.21 : Courbe moment-rotation obtenue à partir du modèle de Frye-Morris [11] 81
Figure.3.22 : Comparaison entre la courbe expérimentale et celles obtenues avec les modèle de
Kukreti [15] et de l’EC3 [2]
82
Figure.3.23 : Courbe moment-rotation selon le modèle de de Frye- Morris [11] 83
Figure.3.24 : Comparaison entre la courbe expérimentale et celle obtenue avec le modèle de
Krishnamurti [12] et de l’EC3 [2]
83
Figure.3.25 : Courbe moment-rotation selon le modèle de de Frye-Morris [11] 84
Figure.3.26 : Comparaison entre la courbe expérimentale et celle obtenue avec le modèle de
Kukreti [15] et de l’EC3 [2]
84
Figure.3.27 : Comparaison entre la courbe moment-rotation expérimentale et celles obtenues
avec les modèles de Krishnamurty [12] et de Frye-Morris [11]
85
Figure.3.28 : Comparaison entre la courbe moment-rotation expérimentale et celle obtenue avec
le modèle de l’EC3 [2]
86
Figure.3.29 : Spécimen RA1 87
Figure.3.30 : Spécimen RA3 87
Figure.3.31 : Spécimen RA4 88
Figure.3.32 : Spécimen RAT 88
Figure.3.33 : Spécimen RE1 89
Figure.3.34 : Spécimen J1 90

v
Figure.3.35 : Spécimen J3 90
Figure.3.36 : Spécimen J4 91
Figure.3.37 : Spécimen FS1 92
Figure.3.38 : Spécimen FS2 92
Figure.3.39 : Spécimen FS3 93
Figure.3.40 : La courbe moment-rotation de Spécimen FS3 obtenue avec le modèle de l’EC3 93
Liste des tableaux
Chapitre 1 : Généralités sur les assemblages
Tableau 1.1. Caractéristiques mécaniques des aciers pour boulons 8
Tableau 1.2. Hypothèses d’assemblage et d’analyse globale de la structure 29
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnés par platine d’about
Tableau 2.1. Les constantes d'ajustement des courbes pour le modèle polynôme de Frye-Morris
(les paramètres géométriques sont en pouce), Moment en kip-inch et rotation en radian 36
Tableau 2.2. Les constantes d'ajustement des courbes pour le modèle polynôme de Frye-Morris
(les paramètres sont en centimètres), Moment en KN.m et rotation en radian 37
Tableau 2.3. Les constantes d'ajustement des courbes pour le modèle polynôme de Frye-Morris
[30] 37
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus de
diverses méthodes empiriques analytiques
Tableau 3.1 : Caractéristiques géométriques des éléments de l’assemblage (mm) 61
Tableau 3.2 : Caractéristiques géométriques de l'assemblage FS1 62
Tableau 3.3 : Caractéristiques géométriques de l'assemblage FS2 63
Tableau 3.4 : Caractéristiques géométriques de l'assemblage FS3 64
Tableau 3.5 : Caractéristiques géométriques de l'assemblage FS4 65
Tableau 3.6 : Caractéristiques mécaniques des matériaux de l’assemblage 66
Tableau 3.7 : (a) Liste des assemblages étudie
Tableau 3.7 : (b) Caractéristiques mécaniques mesurées des éléments
69
70
Tableau 3.8 : Caractéristiques mécaniques des matériaux de l’assemblage 74
Tableau 3.9 : Caractéristiques mécaniques des matériaux de l’assemblage (mm) 77
Tableau 3.10 : Caractéristiques géométriques en mm et mécaniques des matériaux de
l’assemblage
79
vi
Résumé
Actuellement, il est bien connu que le comportement des assemblages poutre-poteau en rotation affecte
le comportement structural local et / ou global des ossatures. L’analyse globale ne peut être effectuée
sans connaitre la relation liant le moment transmis par l’assemblage à la rotation relative qui est la
différence entre les rotations absolues des deux éléments assemblés. La loi de calcul moment rotation
peut être déterminée par des méthodes expérimentales, numériques, empiriques ou analytiques. La
présente étude s’est fixé deux objectifs. Le premier objectif est de présenter les différentes méthodes
de caractérisation des assemblages boulonnées avec platine d’about ainsi que certains résultats d’essais
sur des assemblages disponibles dans la littérature. Le deuxième objectif est de comparer les résultats
expérimentaux avec ceux issues de trois méthodes empiriques et la méthode analytique proposée dans
l’EN 1993-1-8 dans le but d’évaluer la précision de ces méthodes. L’intérêt des méthodes empiriques
est quelles sont plus faciles à appliquer que les méthodes expérimentales, numériques ou même celle
de l’EC3. La comparaison des courbes moment-rotation expérimentales avec celles issues des
formulations empiriques et analytique a permis d’évaluer la précision de ces méthodes pour les
configurations des assemblages considérées.
Mots clés : Assemblage boulonné, platine d’about, courbe moment-rotation, rigidité initiale, Moment
résistant.

vii
Abstract
Nowadays, it is well known that the behaviour of beam to column connections influences the local
and/or the global behaviour of steel frame structures. Indeed, to perform the global analysis the
relationship between the moment transmitted by joint and the corresponding relative rotation between
the members it connects must be defined. The moment-rotation curve used to model the beam to
column behaviour can be determined by means of experimental, numerical, empirical or mechanical
methods. This study has two main purposes. The first purpose is a literature review of the methods
used to characterise the behaviour of beam to column bolted joints with end plate connections. The
second purpose is to compare the experimental moment rotation curves with those determined from
selected empirical methods and the analytical method of the ENV 1993-1-8 in order to assess the
accuracy of these methods. These methods are simple to use compared to the experimental, numerical
or even to the analytical method of EC3. However, they provide results with only limited applicability.
Comparison of experimental data and the results of existing prediction equations for moment-rotation
curves are used to assess the accuracy of these equations.
Keywords: bolted connexion, end plate, moment-rotation curve, initial stiffness, joint moment
resistance.
Introduction générale

A.Hadhoud
Introduction Générale Page 1
Introduction Générale
Les assemblages de structures en acier permettent d’assurer la continuité entre les éléments, tels que
les poteaux et les poutres. Ces assemblages, qui constituent des zones de discontinuité, ont une
influence sur le comportement global de la structure. La caractérisation du comportement des
assemblages n'est pas aisée à cause de leur complexité géométrique et mécanique. Cette complexité
résulte du nombre d’éléments intermédiaires utilisés (boulons, platine, cornière…) ainsi que des
formes géométriques variées et des propriétés matérielles différentes. Elle engendre de fortes
discontinuités et conduit à un comportement global non linéaire de l'assemblage [31].
La construction métallique utilise principalement deux types d'assemblages : les assemblages soudés et
les assemblages boulonnés. Les assemblages boulonnés par platine d’about sont largement utilisés
dans les structures métalliques. En général, ces assemblages boulonnés par platine d’about ont des
configurations géométriques variées du fait de la variation du nombre de rangées de boulons, de
l'espacement des boulons, des dimensions de la platine d’about qui peut-être débordante ou non
débordante, de la présence des raidisseurs, des dimensions des poteaux et des poutres, de la force de
précontrainte dans les boulons, des propriétés mécaniques de l'acier et des surfaces de contact. Ces
détails de conception entraînent des- variations des caractéristiques de l’assemblage et affectent leur
comportement, ce qui rend leur analyse extrêmement complexes [9].
Bien que dans la dernière décennie, plusieurs travaux de recherches expérimentales, analytiques et
numériques ont été effectués pour étudier l’influence des détails d’assemblages sur leur comportement,
ils ne fournissent, dans certains cas, que des informations limitées vu le nombre de paramètres à
considérer. Parmi ces détails de conception, la présence des raidisseurs de platine d’about dans la zone
tendue et comprimée des assemblages métalliques boulonnés dont l’influence peut être considérable.
Les essais expérimentaux sur les assemblages boulonnés avec raidisseurs de platine restent limités en
nombre et ne permettent donc pas de cerner de façon satisfaisante leur fonctionnement mécanique afin
de calibrer une procédure de dimensionnement. En outre, l’EC3 ne donne pas d’indication explicite
quant au calcul des caractéristiques mécaniques des parties débordantes de platines avec raidisseurs
qui permet d’optimiser la conception de ce type d’assemblages.
Les essais expérimentaux n'ont pas donné des résultats satisfaisants d'où le recours à la voie numérique
qui présente un grand intérêt et qui aide à obtenir des résultats détaillés non coûteux comme c'est le cas
des essais expérimentaux.

A.Hadhoud
Introduction Générale Page 2
Le mémoire comporte trois chapitres :
- Le chapitre 1, à caractère bibliographique, permet de faire une présentation générale
des assemblages structuraux. Nous décrivons les différents types d'assemblages boulonnés, on mit
l'accent sur les assemblages poteau-poutre par platine d'about, avec les différentes configurations tout
en mettant l’accent sur le rôle et l’importance de ces derniers pour les constructions métalliques.
Différents modes et moyens d’assemblage, Cette représentation est effectuée du point de vue des
caractéristiques géométriques et mécaniques et des modes de transmission des efforts. Nous revenons
également sur la classification des assemblages, en particulier selon les critères de résistance et de
rigidité ainsi que l'idéalisation des courbes moments-rotation, en s’appuyant principalement sur l'EC3.
- Le chapitre 2, est consacré à l’état de connaissances sur les assemblages métalliques
de type poutre-poteau boulonné par platine d’about. Une étude bibliographique sur les différents
modèles empiriques de calcul des assemblages, avec différentes approches (numérique, expérimentale
et analytique) a permis de collecter un grand nombre d’articles récents qui traitent les assemblages.
- Le chapitre 3, est consacré à etude comparative entre des résultats expérimentaux et des
résultats issus de diverses méthodes empiriques et analytiques et à l'interprétation des résultats.
Nous terminerons notre travail par une conclusion générale dans laquelle nous présenterons les
recommandations et les résultats.
CHAPITRE 1
Généralités sur les
assemblages
A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 3
CHAPITRE 1
Généralités sur les assemblages
1.1 Introduction
Une structure en acier est constituée des profilés en I et/ou en H obtenus par laminage ou
reconstitués par soudage. La réalisation de ce type de structure impose de lier ces éléments
entre eux par des assemblages. Ces assemblages possèdent des formes multiples liées à la
nature des efforts à transmettre mais aussi aux moyens d'attaches utilisés. A l'heure actuelle, il
existe principalement deux types d'assemblages : les assemblages soudés et les assemblages
boulonnés.
Ces assemblages assurent, en général, la continuité à l’intérieur d’un même élément ou
servent de liaison nodale entre les éléments. Ils se caractérisent par de fortes complexités
géométrique et mécanique. La complexité géométrique résulte du nombre d’éléments
intermédiaires utilisés (boulons, platine, cornière…) et des formes géométriques variées de
ces éléments qui engendre de fortes discontinuités. La complexité mécanique provient des
matériaux de natures différentes qui constituent les éléments, des jeux dans les trous pour
boulons et du contact entre les différents composants de l’assemblage. En outre, le
comportement local de ces assemblages affecte de manière directe le comportement global de
la structure en acier.
Ce chapitre est consacré aux généralités sur les assemblages rencontrés dans les ossatures de
bâtiments métalliques. Dans un premier temps on définit le rôle et l’importance d’un
assemblage dans ce type de construction, ensuite nous présentons les différents formes modes
d’assemblages rencontrés et les différents moyens d’assemblage utilisés pour les réaliser. Une
description des différentes configurations d’assemblages poutre- poteau que l’on peut avoir
est présentée.
L’accent est mis sur les assemblages les plus importants dans une ossature métallique
pouvant supportés des moments fléchissant, des efforts normaux et des efforts tranchants. A
savoir les assemblages poutre-poteau boulonné par platine d’extrémité débordante ou non
(configuration) couramment utilisée, en décrivant les zones critiques qui puissent se
développés sous ces efforts internes.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 4
En dernier lieu nous abordons les caractéristiques du comportement des assemblages, ainsi
que la classification des assemblages métalliques. Dans cette classification, nous présentons
les classifications par rigidité, par résistance et par capacité de rotation.
1.2. Définition et rôle d’un assemblage
Une structure comprend des éléments structuraux (poutres et poteaux) et des assemblages.
Les éléments structuraux sont classifiés en fonction du type de chargement qu'ils supportent.
Ils sont appelés poutres si la flexion est prédominante, poteaux si la charge axiale est
prédominante, et poutre-poteau si à la fois la flexion et une charge axiale sont présentes de
manière significative. Pour les assemblages, selon le nombre et la position des éléments
assemblés entre eux dans le plan, nous définissons des configurations d'assemblages
unilatérales (sur un seul côté) ou bilatérales (sur deux côtés) comme il est représenté sur la
figure 1.1. [1]
(a) Assemblage unilatéral (b) Assemblage bilatéral
Fig. 1.1. Configurations d'assemblages dans le plan
La caractéristique essentielle des constructions métalliques est d’être composées d’un
ensemble d’éléments barres (poteaux-poutres) constitués de profilés laminés ou soudés
souvent en forme de (I ou de H) qu’il faut assembler entre eux pour constituer l’ossature ;
Les liaisons entre ces différents éléments représentent ce qu’on appelle communément les
assemblages. Ces derniers jouent un rôle très important et constituent des composants
spécifiques à la construction métallique. On peut les définir comme des organes de liaison qui
permettent de réunir et de solidariser plusieurs éléments entre eux, en assurant la transmission

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 5
et la répartition des diverses sollicitations entre les éléments assemblés, sans générer d’efforts
parasites. [2]
Avant de détailler les différents types d’assemblages, des exemples d’assemblages poutre-
poteau sont utilisés à titre d’illustration pour définir les zones d’attaches et d’assemblages
(Figure 1.2).
Une attache est définie comme l'ensemble de composants physiques qui fixent
mécaniquement les éléments assemblés. On considère que l'attache est concentrée à
l'emplacement où l'action de fixation se produit, par exemple au niveau de l'interface
extrémité de poutre-poteau dans un assemblage poutre-poteau selon l'axe fort. Lorsque l'on
considère l’ensemble attache ainsi que la zone d'interaction correspondante située entre les
éléments assemblés, on utilise alors le terme assemblages.[3]
(a) Assemblage unilatéral (b) Assemblage bilatéral
Fig. 1.2. Définition de la zone d’attache et de l’assemblage (assemblage poteau-poutre)
1.3. Différentes formes d’assemblages métalliques
Dans les ossatures des bâtiments métalliques, les éléments structuraux sont reliés par
des assemblages. Suivant la nature des éléments assemblés, on distingue (Figure1.3)
entre autres :
- Les assemblages poutre- poutre (B) ;
- Les assemblages poutre- poteau (A) ;
- Les assemblages de continuité (C) ;

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 6
-Les assemblages poteau- fondation « pied de poteau » (D).[4]
Fig. 1.3. Différents types d’assemblages dans une structure métallique
1.4. Modes d’assemblage
Les différentes formes d’assemblages ci-dessus mentionnés sont généralement réalisées par
les principaux modes d’assemblages suivants :
- Les assemblages boulonnés.
- Les assemblages soudés.
- Les assemblages chimiques (colles) [5].
1.4.1. Les assemblages boulonnés
1.4.1.1. Le rivetage
Les rivets ont été le premier moyen d'assemblage utilisé en construction métallique. Actuellement,
l'emploi des rivets est limité et on leur préfère, dans la plupart des pays industrialisés, les boulons
et la soudure. On les rencontre donc essentiellement dans les structures anciennes, datant du début
du 20ème
siècle [3].

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 7
Fig. 1.4. Rivet et rivet à anneau
1.4.1.1.1. Rivets à anneau
Les rivets à anneau sont des éléments de connexion mécanique qui tiennent (dans la mesure
où il a une même forme de tête et qu'il introduit une force de précontrainte) et du boulon (car
une partie de sa tige est rainurée).
Les principales caractéristiques : la tige se compose de deux parties rainurées (et non pas
filetées), séparées par une portion de tige dont la section est affaiblie. L'acier des rivets à
anneau est un acier à haute résistance [3].
1.4.1.2. Le boulonnage
Les boulons peuvent être utilisés en atelier ou sur le chantier. Ils sont assez couramment mis en
œuvre. Un boulon comporte une tête hexagonale, un corps cylindrique fileté qui constitue la vis et
un écrou également hexagonal. Les rondelles, freins d’écrou, contre-écrou font partie des
accessoires des assemblages. Les jeux dans les trous sont de 1 à 2 mm. Ils travaillent soit en
traction, soit au cisaillement.
Les caractéristiques mécaniques des boulons sont données au tableau 1.1 où :
f yb : Limite d’élasticité
fub : Résistance à la traction

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 8
Tableau 1.1. Caractéristiques mécaniques des aciers pour boulons [6]
Ce tableau montre également que l'on distingue deux types de boulons, qui se différencient
par leurs caractéristiques mécaniques plus ou moins élevées.
les boulons de charpente métallique (aciers 4.6 et 5.6) : ils sont employés couramment
pour réaliser les assemblages faiblement sollicités des halles et des bâtiments.
les boulons à haute résistance (aciers 8.8 et 10.9) : ils sont généralement utilisés pour
les assemblages de ponts, ainsi que pour les assemblages fortement sollicités ou
soumis à des effets dynamiques. Seuls les boulons à haute résistance peuvent être
précontraints.
L’Eurocode3 ajoute les classes de qualité 4.8, 5.8 et 6.8 à celles données dans le tableau 1.1 et
utilise la notion de boulon ordinaire à la place de boulon de charpente.
Remarque :
Quel que soit le type de boulons, le jeu normal entre la tige du boulon et le trou des pièces
assemblées est fixé à 2mm pour les diamètres de boulons inférieurs ou égaux à 24mm, et à
3mm pour les diamètres de boulons égaux ou supérieurs à 27mm. Le diamètre 0d du trou vaut
donc :
· 0d =d+2mm pour d =24mm.
· 0d =d+3mm pour d= 27mm.
L'Eurocode3 propose les mêmes diamètres de trous, sauf pour les diamètres de boulons :
0d = 14mm, pour lesquels 0d = d+1mm.
Dans certains cas, un jeu plus petit peut être exigé, on parle alors de boulons ajustés lorsque le
jeu est de 0.3 mm seulement. L’emploi de boulons ajustés offre l'avantage de créer des
assemblages avec un mouvement relatif possible très petit, donc des structures très peu
déformables. Cependant, la réalisation des trous doit être précise, ce qui augmente

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 9
sensiblement le coût de ce type d'assemblage. On n'utilisera de ce fait les boulons ajustés
qu’en cas de nécessité absolue.[6]
La figure 1.5 montre les différentes parties composant un boulon de charpente et d’un boulon
à haute résistance. Ces derniers se distinguent des boulons de charpente métallique par
l'inscription de la classe de qualité de l'acier du boulon sur leur tête et leurs rondelles.
Fig. 1.5. Boulon de charpente et boulon à haute résistance
1.4.2. Les assemblages soudés
Le soudage est un procédé qui permet d'assembler par fusion ou plastification. Le soudage
implique donc :
a) l'existence d'une source de chaleur suffisante pour obtenir la fusion du matériau, elle
peut être d'origine électrique (résistance, arc, friction).
b) Une aptitude du matériau à être soudé, appelée soudabilité, la soudabilité à haute
température dépend des qualités propres du matériau, mais également de divers
paramètres limitatif, tels que :
les modifications de la structure physico-chimique du matériau ;
l'apparition de fissurations et de criques au refroidissement ;
l’apparition de déformations géométriques dues aux effets de dilatation et
retrait ;
la naissance de contraintes internes. [7]

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 10
Le soudage présente, par rapport au boulonnage, plusieurs avantages:
Il assure la continuité de la matière, et de ce fait garantit une bonne
transmission des sollicitations
Il dispense de pièces secondaire (goussets, attaches,…….)
Il est de moindre encombrement et plus esthétique que le boulonnage.
En revanche, il présente divers inconvénients:
Le métal de base doit être soudable.
Le contrôle des soudures est nécessaire et onéreux.
Le contrôle des soudures est aléatoire.
Le soudage exige une main-d’œuvre qualifiée et un matériel spécifique [8].
Fig. 1.6. Assemblages soudés
1.4.3. Les assemblages chimiques (colles)
Encore expérimentale, le collage des pièces métalliques ne s’emploie en pratique que pour des
pièces d’enveloppe où les contraintes mécaniques à prendre en compte sont faibles (par
exemple raccord d’angle pour un bardage). Néanmoins les progrès très importants réalisés ces
dernières années dans les colles laissent prévoir un grand développement de ce type
d’application.
1.5. Fonctionnement des assemblages
1.5.1. Fonctionnement par obstacle: c'est le cas des boulons ordinaires, non précontraints
dont les tiges reprennent les efforts et fonctionnement en cisaillement.
A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 11
1.5.2. Fonctionnement par adhérence: dans ce cas, la transmission des efforts s'opère par
adhérence des surfaces des pièces en contact. Cela concerne le soudage, et le boulonnage par
boulons HR.
1.5.3. Fonctionnement mixte: c'est le cas du rivetage (et dans les cas extrêmes, du
boulonnage HR) à savoir que les rivets assurent la transmission des efforts par adhérence des
pièces jusqu'à une certaine limite, qui lorsqu'elle est dépassée, fait intervenir les rivets par
obstacle au cisaillement. [5]
1.6. Configurations d'assemblages poutre-poteau
Dans les portiques, les éléments structuraux linéaires (poutres et poteaux) sont attachés à leurs
extrémités par des assemblages. Les assemblages boulonnés les plus couramment utilisés sont
ceux utilisant des platines d’about, des cornières d'âme et/ou des semelles. Le choix du type
d'assemblage spécifique à adopter est en général lié au type d'équipement possédé par le
fabricant et les exigences concernant le processus de montage sur site [3].
1.6.1. Assemblages poutre- poteau par platine d'about
Dans ce type d'assemblages, la transmission des moments fléchissant se fait par
l'intermédiaire d'une platine d’about soudée à l'extrémité de la poutre et attachée au poteau par
des boulons disposés en plusieurs rangées verticales. Cette platine peut être débordante ou
non débordante (Figure 1.7). Ils sont utilisés sous réserve de savoir déterminer le degré
d’interaction entre les éléments, ce qui suppose la connaissance de la courbe moment-rotation
de l’assemblage.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 12
(a) assemblage par platine débordante (b) assemblage par platine non débordante
Fig. 1.7. Assemblage poteau-poutre par platine d’about boulonnée
Il convient de signaler les assemblages poutre-poteau caractérisé par la présence de poutres
assemblées sur les semelles et sur l'âme du poteau (Figure 1.8). C'est ainsi que nous pouvons
trouver des zones d'attache sur l'axe de fort inertie et sur l'axe de faible inertie du poteau [3].
Fig. 1.8. Exemple d'assemblage tridimensionnel
A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 13
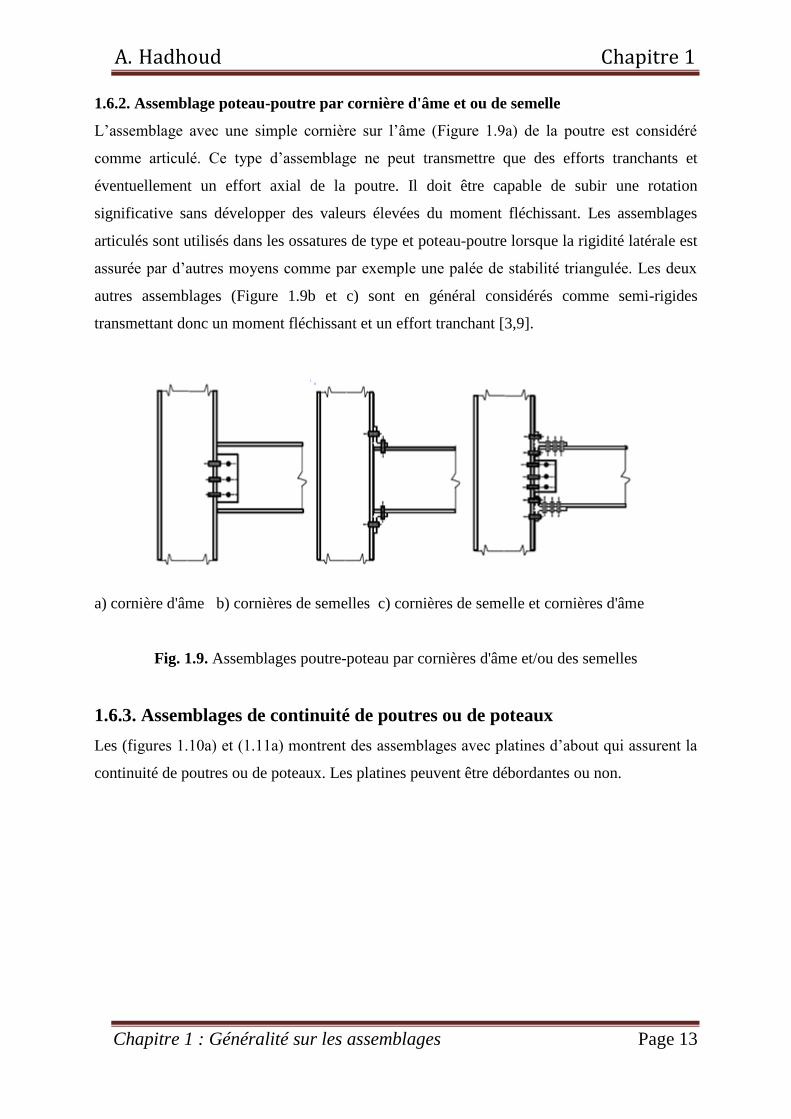
1.6.2. Assemblage poteau-poutre par cornière d'âme et ou de semelle
L’assemblage avec une simple cornière sur l’âme (Figure 1.9a) de la poutre est considéré
comme articulé. Ce type d’assemblage ne peut transmettre que des efforts tranchants et
éventuellement un effort axial de la poutre. Il doit être capable de subir une rotation
significative sans développer des valeurs élevées du moment fléchissant. Les assemblages
articulés sont utilisés dans les ossatures de type et poteau-poutre lorsque la rigidité latérale est
assurée par d’autres moyens comme par exemple une palée de stabilité triangulée. Les deux
autres assemblages (Figure 1.9b et c) sont en général considérés comme semi-rigides
transmettant donc un moment fléchissant et un effort tranchant [3,9].
a) cornière d'âme b) cornières de semelles c) cornières de semelle et cornières d'âme
Fig. 1.9. Assemblages poutre-poteau par cornières d'âme et/ou des semelles
1.6.3. Assemblages de continuité de poutres ou de poteaux
Les (figures 1.10a) et (1.11a) montrent des assemblages avec platines d’about qui assurent la
continuité de poutres ou de poteaux. Les platines peuvent être débordantes ou non.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 14
(a) Assemblage par platines d'about (b) Assemblage par couvre-joint
Fig. 1.10. Assemblage de continuité de poutre
(a) Assemblage par couvre-joint (b) Assemblage par platines d'about
Fig. 1.11. Assemblage de continuité de poteau
Une alternative à l'utilisation de platines d'about fait appel aux assemblages par couvre-joint
(Figures 1.10b et 1.11b) avec des zones d'attaches boulonnées réalisées sur les âmes et les
semelles des poutres.
1.7. Renforcement d’assemblage
L'assemblage par platine d’about est largement utilisé dans les structures métalliques et sa
popularité est attribuée à la simplicité et l'économie de sa fabrication. Toutefois, ces
assemblages sont extrêmement complexes dans leur analyse et comportement structural,
particulièrement quand ils sont soumis à des efforts très importants. Il convient donc d’être
particulièrement vigilant sur les détails de conception des assemblages car c’est en cet endroit

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 15
que se concentrent toutes les difficultés par suite de la présence de pièces intermédiaires. De
surcroit, ces zones à brusque changement de géométrie induisent des efforts localisés et des
concentrations de contraintes. Ainsi, des ajustements peuvent être faits à un assemblage par
platine d’about simple pour répondre aux exigences de différentes situations. Par exemple,
des raidisseurs de platine d’about peuvent être ajoutés pour augmenter la rigidité de la platine
et/ou sa résistance tout en réduisant son épaisseur [10]. Trois moyens de renforcement sont
actuellement couverts dans l’EN 1993-1-8[3]: les raidisseurs transversaux de poteau, les
contre-plaques et les doublures d'âme.
1.7.1. Les raidisseurs transversaux de poteau
Ils sont soudés, au niveau des semelles en zones tendue et comprimée du poteau (Figure
1.12a), pour augmenter la rigidité et la résistance de l'âme du poteau en traction et en
compression et de la semelle du poteau en flexion. Des raidisseurs diagonaux peuvent aussi
être utilisés pour améliorer la résistance de l'âme du poteau en cisaillement, en combinaison
avec les raidisseurs transversaux (Figure 1.12b) [4].
1.7.2. Les renforcements par contre-plaques
Ce sont des platines boulonnées contre la semelle du poteau en recouvrant au moins deux
rangées de boulons dans la zone tendue de l'assemblage (Figure 1.12c). Elles permettent
d’augmenter la résistance de la semelle du poteau pour certains modes de ruine ainsi que la
rigidité dans certains cas, comme en présence de la précontrainte. Dans l’EN 1993-1-8[3],
seule la partie résistante est considérée [4].
1.7.3. Les doublures d'âme
Une doublure d'âme, soudée sur tout son pourtour (Figure 1.12d) est utilisée pour augmenter
la résistance de l'âme du poteau vis-à-vis de la traction, de la compression et du cisaillement.
Dans le cas où la largeur de la doublure est très grande, des boulons sont nécessaires pour la
solidariser à l'âme du poteau.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 16
Fig. 1.12. Moyens de renforcement des assemblages selon l'EN 1993-1-8 [3]
Durant la dernière décennie, de nombreuses recherches expérimentales, analytiques et
numériques ont été entreprises afin de mieux maîtriser le comportement d’assemblages de
conceptions existantes ou nouvelles. L’assemblage avec raidisseurs de platine d’about
débordante est relativement courant en France dans les continuités de poutre ou les liaisons
poteau-poutre (Figure 1.13). Ces raidisseurs sont sous forme d’un plat de gousset soudé entre
la semelle de la poutre et la platine d’about pour raidir la partie prolongée de la platine
d’about et assurer la continuité de l'âme de la poutre. Ce procédé est aussi répandu aux Etats-
Unis et au Japon surtout après les séismes de Northridge (USA, 1994) et Hyokogen-Nanbu
(Japon, 1995) tout en respectant en partie les traditions de conception et de fabrication des
assemblages de ces mêmes pays [6].
A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 17
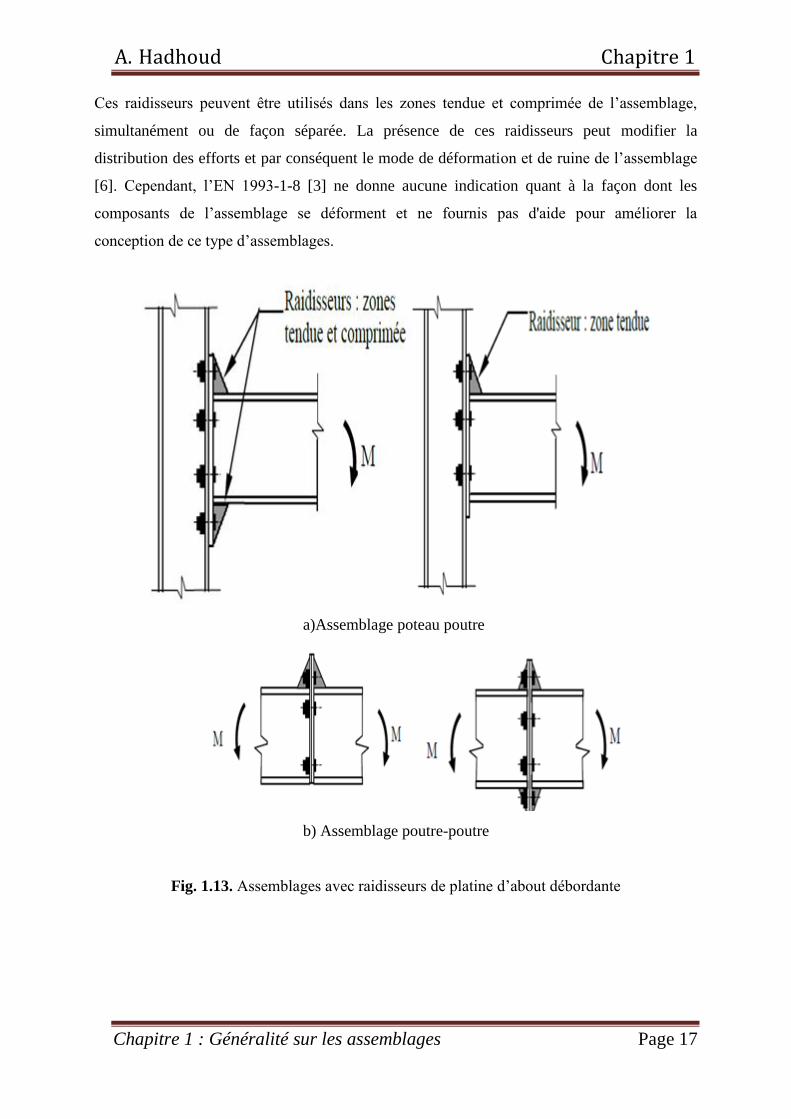
Ces raidisseurs peuvent être utilisés dans les zones tendue et comprimée de l’assemblage,
simultanément ou de façon séparée. La présence de ces raidisseurs peut modifier la
distribution des efforts et par conséquent le mode de déformation et de ruine de l’assemblage
[6]. Cependant, l’EN 1993-1-8 [3] ne donne aucune indication quant à la façon dont les
composants de l’assemblage se déforment et ne fournis pas d'aide pour améliorer la
conception de ce type d’assemblages.
a)Assemblage poteau poutre
b) Assemblage poutre-poutre
Fig. 1.13. Assemblages avec raidisseurs de platine d’about débordante
A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 18
1.8. Précautions constructives
Les assemblages constituent des zones particulières plus fragiles que les zones courantes
des pièces, car les sections sont réduites du fait des perçages où la nature de l'acier est
affaiblie par la chauffe du soudage. En outre, les assemblages sont soumis à des sollicitations
qui peuvent s'inverser et les contraintes peuvent changer de sens (une poutre de charpente
peut fléchir dans le sens positif sous charge de neige et dans le sens négatif sous soulèvement
par le vent). C'est pourquoi il faut être particulièrement vigilant dans la conception et le calcul
des assemblages, afin de se prémunir contre tout risque de rupture brutale.
Les assemblages peuvent être considérés comme autant de "talons d'Achille" dans une
structure, et les anciens ont coutume de dire qu'une charpente sous dimensionnée, mais
correctement assemblée, est préférable à une charpente correctement dimensionnée, mais mal
assemblée. Dans le premier cas, la réserve de plasticité autorisera l'apparition de grandes
déformations, qui préviendront du risque possible, en revanche, dans le second cas, aucune
déformation prémonitoire ne sera observable avant la rupture brutale mais un bon
dimensionnement n'est pas suffisant, si la conception n'est pas correcte il faut assurer, au
travers de l'assemblage, la transmission parfaite des forces, afin de ne pas créer d'efforts ou de
moments secondaires parasites [6].
1.9. Classification des assemblages selon l’Eurocode 3
Une étape importante du calcul d'une ossature est la caractérisation du comportement en
rotation des assemblages, c'est-à-dire l'évaluation des propriétés mécaniques en termes de
rigidité, de résistance et de ductilité.
Ces dernières années, les activités de recherche dans le domaine des assemblages se sont
principalement concentrées sur deux aspects:
l'évaluation des propriétés mécaniques d'un assemblage afin de prédire son
comportement en termes de rigidité, de résistance et de ductilité;
l'analyse et la procédure de dimensionnement de la structure incluant le comportement
des assemblages.
L'intégration du comportement d'un assemblage dans l'analyse des structures doit être
précédée de plusieurs étapes:
caractérisation de l'assemblage: évaluation des caractéristiques mécaniques de

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 19
l'assemblage.
classification de l'assemblage: comparaison du comportement de l'assemblage
(rigidité, résistance et ductilité) à des critères conventionnels afin de juger de la
manière de le considérer dans l'analyse : rigide, rotule ou semi-rigide (pour le critère
de rigidité); à résistance complète, partielle ou nulle (pour le critère de résistance) et
ductile, semi- ductile ou fragile (pour le critère de ductilité).
modélisation de l'assemblage: représentation de l'assemblage dans l'analyse
structurale.
idéalisation de l'assemblage: comportement idéalisé de l'assemblage selon le type
d'analyse.
1.10. Caractérisation du comportement des assemblages
Lors de l’analyse structurale, les assemblages entre les éléments structuraux sont
traditionnellement modélisés comme rigides ou articulés. Les nœuds articulés ne transmettent
aucun moment de flexion et n’empêchent pas la rotation des éléments assemblés. Quant aux
nœuds rigides, ils interdisent toute rotation relative entre les éléments assemblés et assurent
ainsi la transmission intégrale des efforts appliqués. Toutefois, le comportement réel des
assemblages est situé entre les deux cas extrêmes, généralement supposés rigides ou articulés.
Les assemblages les plus flexibles sont capables de transmettre un certain moment de flexion
tandis que les assemblages les plus rigides autorisent toujours une certaine rotation relative
des pièces assemblées. L’acceptation de cette réalité a conduit à l’introduction du concept de
la semi-rigidité dans les approches de calcul et de dimensionnement des structures (EN 1993-
1-8[3]). Ce concept permet de tenir compte du comportement réel de l'assemblage situé entre
l’articulation et l’encastrement (Figure 1.14). L’assemblage semi-rigide est modélisé au
moyen d’un ressort en rotation placé au point d’intersection entre les axes de la poutre et du
poteau [3].

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 20
Fig. 1.14. Modélisation des assemblages métalliques
La rigidité jS de ce ressort caractérise la rigidité en rotation de l’assemblage soumis à
un moment fléchissant. Une rigidité jS nulle (ou très petite) correspond à un assemblage
simple (rotulé) qui ne transmet pas de moment fléchissant de la poutre au poteau. Au
contraire, une rigidité jS infiniment grande (très grande) correspond à un assemblage continu
(rigide).
Selon l’EN 1993-1-8 [3], le comportement mécanique d’un assemblage est caractérisé par
trois caractéristiques principales à savoir : le moment résistant (,j RdM ), la rigidité (
,S j ini ou
jS
) et la capacité de rotation ( cd ). Ces caractéristiques sont obtenues à partir de la courbe
moment-rotation [4].

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 21
Fig. 1.15. Courbe moment-rotation d’un assemblage métallique
Il a été démontré que l’introduction du concept d’assemblage semi-rigide dans les ossatures
permettait, par un calcul plus précis et plus réaliste, d’effectuer une vérification plus sûre des
critères de dimensionnement de l’ossature et d’aboutir à une configuration structurale moins
coûteuse.
Les propriétés de la loi moment-rotation d’un assemblage peuvent être théoriquement définies
selon l’EN-1993-1-8[3] par une classification en rigidité, résistance et capacité de rotation de
ces assemblages [4].
1.11. Classification des assemblages métalliques
Selon l’EN 1993-1-8 [3], les assemblages doivent être modélisés en vue d’une analyse globale
de la structure. Le type de modélisation des assemblages à adopter dépend de la classification
en termes de rigidité (rigide, semi-rigide et articulé), de résistance (résistance complète ou
partielle) et de capacité de rotation [3].
Les courbes de comportement M des assemblages peuvent être ramenées à trois grandes
catégories représentées sur la figure 1.16. Chaque catégorie de comportement M est
associée à la conception de l’assemblage correspondante [10].

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 22
Fig. 1.16. Classification des assemblages [10].
1.11.1. Classification des assemblages en rigidité
La rigidité de l’assemblage intervient dans la phase initiale de l’analyse globale des structures
en acier. Ainsi lors de la modélisation de la structure en acier, une attention particulière doit
être accordée à la rigidité de l’assemblage. Bien sûr, la rigidité de l’assemblage influe sur
le niveau de sollicitations et la flèche dans les poutres, comme illustré sur la figure 1.17. En
particulier, la rigidité des assemblages peut également avoir des effets significatifs sur
le comportement de la structure en acier et sur sa stabilité globale. La classification des-
assemblages, établie par l’approche de l’EN 1993-1-8 [3], distingue entre l’assemblage
articulé, l’assemblage semi-rigide et l’assemblage rigide et donne les limites de rigidités pour
chacun de ces types d’assemblage [3,11]:
Zone 1: si
,S j ini 8 /b bEI L (Structure contreventée)
,S j ini
25 /b bEI L (Structure non contreventée)

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 23
Zone 2 : si 0,5 /b bEI L ,S j ini
8 /b bEI L (Structure contreventée)
,S j ini
25 /b bEI L (Structure non contreventée)
Zone 3 : si
,S j ini
0,5 /b bEI L
(a) Assemblages articulés (b) Assemblage semi rigide
Fig. 1.17. Répartition élastique des moments fléchissant dans un portique simple [9]
Un assemblage qui permet de transmettre à la fois un moment de flexion, un effort tranchant
et parfois un effort normal, il n’en reste pas moins que son rôle principal est de transmettre
un moment de flexion.
Un assemblage articulé a pour mission de reporter depuis la poutre au poteau qu’un effort
tranchant et ou un effort normal. On comprend dès lors que ce type d’assemblage convient
aux structures contreventées. Au niveau de chaque assemblage, les charges verticales sont
transmises du plancher aux poutres et des poutres aux poteaux ; les charges horizontales sont
reprises directement par le système de contreventement adopté.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 24
Fig. 1.18. Limites de classification de rigidité selon l’EN 1993-1-8 [3]
1.11.2. Classification des assemblages par la résistance
La classification fondée sur la résistance est utile dans le cas des structures en acier calculées
par la théorie de plasticité. La classification de l’EN 1993-1-8 [3] vis-à-vis de la résistance des
assemblages fait une distinction entre l’assemblage à résistance complète, l’assemblage à
résistance partielle et l’assemblage articulé (Figure 1.19) [12].
1.11.2.1. Assemblage à résistance complète
Un assemblage à résistance complète est un assemblage qui possède une résistance plus
grande que la résistance de la poutre assemblée [12]. Dans ce cas, la déformation plastique est
supposée se former dans la poutre assemblée. L’assemblage est considéré à résistance
complète si :
,j RdM ,M pl Rd
(Avec vérification de la capacité de rotation)
,j RdM ,1,2M pl Rd
(Sans vérification de la capacité de rotation)
Où ,j RdM désigne le moment résistant de calcul de l’assemblage et ,M pl Rd
le moment
plastique de calcul de la poutre assemblée.
Il n’est pas rare que la limite d’élasticité du matériau dont est constituée la poutre assemblée
soit élevée par rapport à celle de l’assemblage. Dans ce cas, le calcul conduit alors à une sous-
estimation de la résistance de la poutre assemblée et la rotule plastique se formerait dans
l'assemblage [3].

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 25
Fig. 1.19. Limites de la classification des assemblages par résistance
1.11.2.2. Assemblage à résistance partielle
Un assemblage à résistance partielle représente la solution intermédiaire. L’assemblage doit
posséder une capacité de rotation suffisante pour assurer la formation de la rotule plastique.
L’assemblage est considéré à résistance partielle si :
,0,25M pl Rd ,j RdM
,M pl Rd
1.11.2.3. Assemblage articulé
Un assemblage articulé possède une faible résistance, au maximum 25% de la résistance
minimale requise pour avoir un assemblage résistance complète.
,j RdM ,0,25M pl Rd
1.11.3. Classification des assemblages par capacité de rotation
La capacité de rotation est une mesure de la déformation qui peut être atteinte avant que

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 26
la ruine dans l’assemblage ne provoque une chute de la résistance flexionnelle. Dans
l’approche de l’EN 1993-1-8[3], la classification des assemblages en termes de leur capacité
de rotation demeure toujours vague. Cette classification constitue en principe une mesure de
l’aptitude des assemblages à résister à une rupture fragile ou à une instabilité locale
prématurée.
Une application pratique de cette classification des assemblages consiste à vérifier si
une analyse globale basée sur un calcul plastique peut être conduite [3].
Une classification des assemblages selon leur capacité de rotation est toutefois proposée dans
la littérature et qui dépend de la rotation de l’assemblage par rapport à celle de la poutre
assemblée. Trois classes ont été définies à savoir, l’assemblage ductile, l’assemblage semi-
ductile et l’assemblage fragile (Figure 1.20). Le comportement ductile est caractérisé par
une courbe moment-rotation avec un plateau étendu qui indique généralement l'apparition de
déformations plastiques avant la rupture. Le comportement fragile est caractérisé par
une rupture, avec une rotation limitée, généralement sans déformation plastique. Enfin,
le comportement semi-ductilité se situe entre le comportement fragile et le comportement
ductile.
Fig. 1.20. Classification des assemblages selon la capacité de rotation
A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 27
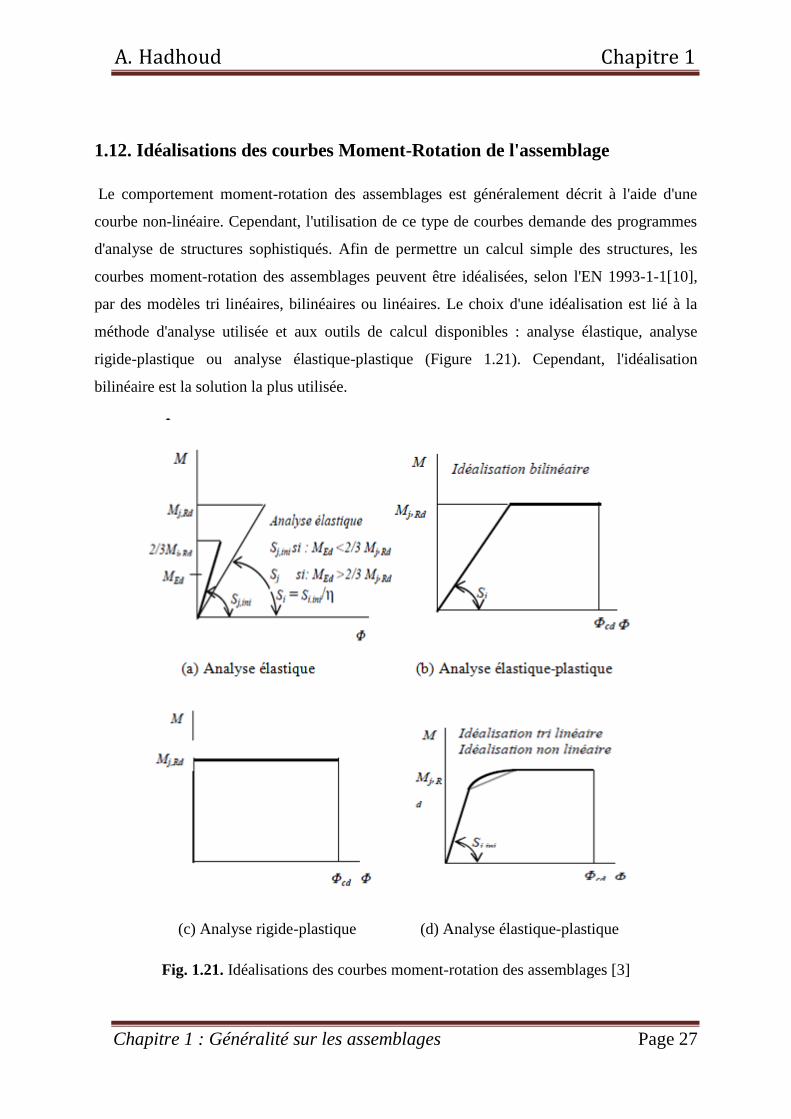
1.12. Idéalisations des courbes Moment-Rotation de l'assemblage
Le comportement moment-rotation des assemblages est généralement décrit à l'aide d'une
courbe non-linéaire. Cependant, l'utilisation de ce type de courbes demande des programmes
d'analyse de structures sophistiqués. Afin de permettre un calcul simple des structures, les
courbes moment-rotation des assemblages peuvent être idéalisées, selon l'EN 1993-1-1[10],
par des modèles tri linéaires, bilinéaires ou linéaires. Le choix d'une idéalisation est lié à la
méthode d'analyse utilisée et aux outils de calcul disponibles : analyse élastique, analyse
rigide-plastique ou analyse élastique-plastique (Figure 1.21). Cependant, l'idéalisation
bilinéaire est la solution la plus utilisée.
(c) Analyse rigide-plastique (d) Analyse élastique-plastique
Fig. 1.21. Idéalisations des courbes moment-rotation des assemblages [3]

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 28
1.13. Modélisation des assemblages en vue de l’analyse globale des
structures
Le comportement des assemblages affecte le comportement global des structures.
La prise en compte du comportement des assemblages permet d’avoir différents types de
modèles de structures à savoir les structures simples, continues et semi-continues
correspondant respectivement aux modèles d’assemblages articulés, rigides et semi-rigides.
Actuellement, dans la pratique courante, les assemblages sont considérés dans le calcul
des structures comme rigides ou articulés. A cet effet, ils doivent être calculés pour satisfaire
les classifications des assemblages rigides ou articulés. Réellement, les assemblages sont
semi-rigides. Ils peuvent être modélisés sous forme de ressorts en spirale présentant
des relations moment-rotation pouvant aller du type linéaire élastique au type non linéaire qui
tient compte de la capacité de rotation. L’utilisation d’un modèle d’analyse globale de
la structure linéaire élastique impose une modélisation linéaire élastique des assemblages.
Pour l’analyse élastique parfaitement plastique, un modèle d’assemblage bilinéaire est
nécessaire. Par conséquence, le type d’analyse de la structure utilisé a un effet direct sur
le degré de complexité du modèle d’assemblage à considérer, particulièrement lorsqu’une
analyse plastique est utilisée et que la formation de rotules dans les assemblages est autorisée
[3].
Dans le cas d’une analyse globale élastique de la structure, seules les caractéristiques de
rigidité sont utilisées pour la modélisation des assemblages. Dans le cas d'une analyse rigide
plastique, la caractéristique principale est la résistance. Dans tous les autres cas, ce sont à
la fois les caractéristiques de rigidité et de résistance qui gouvernent la manière dont il
convient de modéliser les assemblages. Ces possibilités sont illustrées dans le tableau 1.2.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 29
Tableau 1.2. Hypothèses d’assemblage et d’analyse globale de la structure [11]
En vue d'une analyse globale de la structure, trois types de calcul peuvent être effectués. Ils
sont liés à la classification de l'assemblage : un assemblage rigide assure la continuité des
moments de la liaison, un assemblage semi-rigide assure seulement une continuité partielle et
un assemblage articulé n'assure pas de continuité entre les éléments.
Les assemblages rigide et articulé sont les cas conventionnels qui conduisent à un calcul
simple mais les assemblages réels sont situés entre ces deux cas. Ainsi, pour une analyse
élastique-plastique globale de la structure, l’assemblage peut être représenté par un ressort
flexionnel qui tient compte de ses sources de déformabilité.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 30
Fig. 1.22. Modélisation d'un assemblage [3]
1.14. Modélisation des assemblages
Pour déterminer les efforts appliqués à l’assemblage, une analyse globale s’impose. Dans
cette analyse, on doit déterminer les charges de calcul appliquées sur la structure en acier ainsi
que la définition des bases de dimensionnement de cette structure. Lors de cette analyse, il y a
lieu également de prendre en compte le comportement structural de l’assemblage (assemblage
articulé, semi-rigide ou rigide, assemblage à résistance partielle ou complète). La figure 1.23
donne une illustration de la modélisation simplifiée des assemblages (continu, semi-continu et
simple) lors d’une analyse globale des structures en acier.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 31
Fig. 1.23. Modélisation simplifiée des assemblages [3]
Dans cette modélisation, les poutres et les poteaux de la structure en acier sont représentés par
des lignes (axes neutres) qui passent par les centres de gravité de leurs sections transversales.
Ainsi, la portée effective des travées est dictée par la distance qui sépare les axes neutres des
poteaux.
1.15. Conclusion
D'une manière générale, la construction métallique et les avantages qu’elle offre ne sont plus
à démontrer, elle ouvre une large porte vers la modernisation et l'industrialisation de la
construction, elle est appréciée et recherchée dès que des grandes portées ou des grandes
hauteurs s’imposent.
L’Eurocode 3 a adapté une classification très importante des assemblages pour bien estimer
les caractéristiques des assemblages permettant la conception des ossatures en acier à partir
de leurs rigidité, résistance et capacité de rotation. Cependant ce type de construction repose
principalement sur les assemblages des différents éléments nécessitant une précaution
supplémentaire, d’où les méthodes avancées de calcul qui considère l'assemblage comme un
élément séparé.

A. Hadhoud Chapitre 1
Chapitre 1 : Généralité sur les assemblages Page 32

CHAPITRE 2 Méthodes de caractérisation
des assemblages boulonnés
par platine d’about

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 32
par platine d’about
CHAPITRE 2
Méthodes de caractérisation des assemblages boulonnés par platine d’about
2 .1 Introduction
L'analyse globale des ossatures nécessite d’inclure le comportement réel des assemblages à
travers les courbes moment-rotation. Il existe dans littérature 3 familles de méthodes
permettant de modéliser la courbes moment- rotation d’un assemblage poteau-poutre en acier
boulonné par platine d’about. On distingue :
- les modèles analytiques ;
- les modèles numériques ;
- les modèles expérimentaux.
Les modèles expérimentaux permettent d’étudier le comportement des assemblages à partir
des essais au laboratoire sur des spécimens à l’échelle réelle. Les modèles numériques
permettent d’analyser le comportement des assemblages par des modèles éléments finis plus
ou moins sophistiqués. Les méthodes analytiques traitent le comportement des assemblages
par une analyse souvent théorique, parfois empirique. En pratique, on utilise souvent les
méthodes analytiques.
Dans ce chapitre, on présente une revue générale des méthodes analytiques, empiriques et
numériques permettant de caractériser les assemblages poteau-poutre en acier boulonnés par
platine d’about débordante ou non. Sur la partie débordante, la platine peut être renforcée ou
non par des raidisseurs. De même l’âme du poteau peut être ou non renforcé par
des raidisseurs horizontaux.
2.2. Les modèles empiriques
Les modèles empiriques sont principalement basés sur les techniques des courbes
d’ajustement par lesquelles une simple expression mathématique reproduit les données
expérimentales ou les résultats numériques avec certains coefficients des courbes
d’ajustement. Les coefficients sont calibrés par les données expérimentales. L’avantage du
modèle empirique est qu’une fois les constantes déterminées, la relation moment-rotation peut
être exprimée explicitement et utilisée dans l’analyse structurale ordinaire pour la conception
proposée. Il y a un large spectre de modèles empiriques à des degrés divers de complexité.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 33
par platine d’about
Quelques exemples de ces modèles utilisés pour représenter le comportement monotone
statique des assemblages seront présentés dans ce paragraphe.
L’inconvénient majeur de ces méthodes est qu’ils ne sont applicables que pour des
assemblages dont les configurations concordent avec ceux utilisés pour générer le modèle. Il
n’est pas aussi possible d’évaluer l’influence de chaque paramètre sur les caractéristiques de
l’assemblage.
2.2.1. Modèles linéaires
La figure 2.1 montre trois modèles linéaires simples. Les modèle linéaires de rigidité simple
proposés par Rathbun [32], Monforton et Wu [34] et Lightfoot et Le Messuner, parmi
d’autres, utilise la rigidité initiale 𝑅𝑘𝑖 pour représenter le comportement des assemblages
soumis n’importe quel type de chargement. La validité de ce modèle se détériore au fur et à
mesure que le moment augmente au-delà de la limite de l’utilité de l’assemblage. Des
modèles bilinéaires proposés par Tarpy et Cardinal [35] et Lui et Chen [33] montrent une
meilleure représentation du comportement des assemblages pour lesquels la tangente initiale
de la courbe moment-rotation est remplacée par une droite un peu plus profonde pour un
certain moment de transition. Dans le modèle représenté par des tronçons linéaires, la courbe
non linéaire 𝑀−𝜃𝑟 est constituée de segments de droite. Bien que ces modèles linéaires sont
faciles à utiliser, les erreurs et les changements soudains de rigidité aux points de transition
rendent leur utilisation pratique difficile.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 34
par platine d’about
Fig. 2.1. Modèles linéaires M-r
2.2.2. Modèle polynôme de Frye et Morris
Frye et Morris [11] ont développé un modèle polynomial pour prévoir le comportement de
plusieurs types d’assemblage. Dans ce modèle, la relation 𝑀−𝜃𝑟 est représentée par un polynôme
de puissance impair de la forme :
𝜃 ( 𝑀 + ( 𝑀 + ( 𝑀 (2.1)
Où K est un paramètre de normalisation qui dépend de la géométrie de l’assemblage et C1, C2
et C3 sont des constantes d'ajustement de courbe dont les valeurs, fonction de la géométrie de
l’assemblage, sont indiquées dans le tableau 2.1.
A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 35
par platine d’about
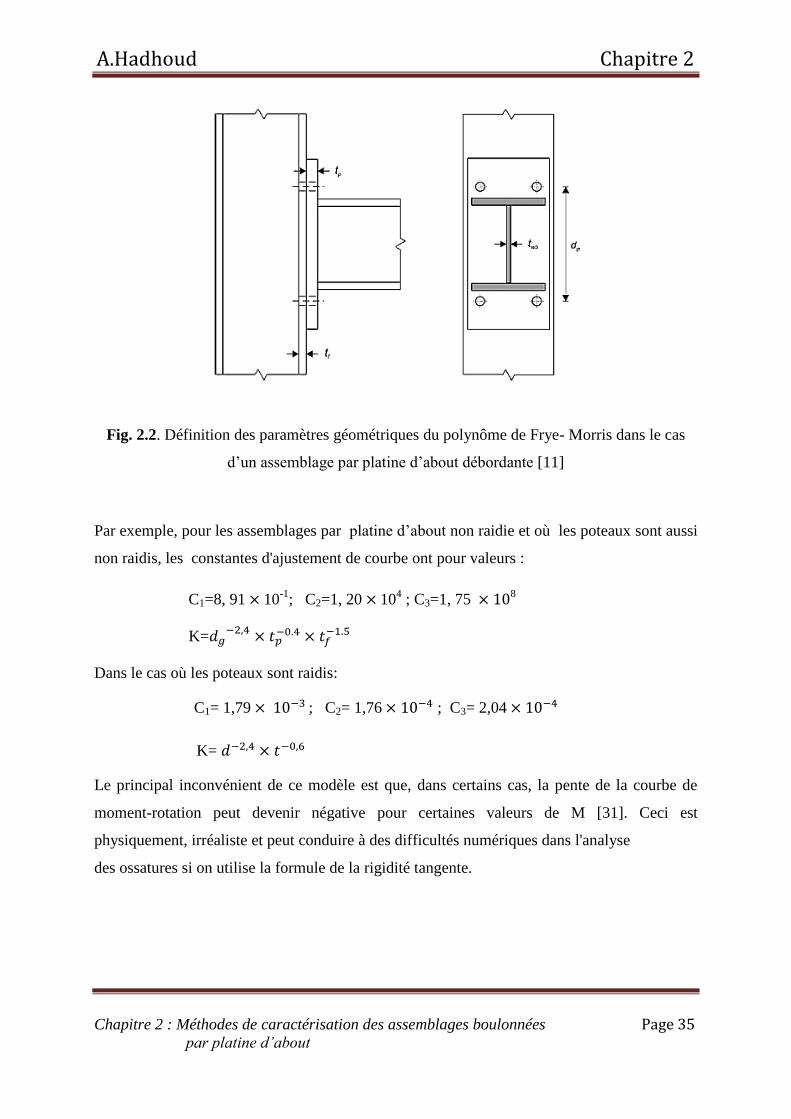
Fig. 2.2. Définition des paramètres géométriques du polynôme de Frye- Morris dans le cas
d’un assemblage par platine d’about débordante [11]
Par exemple, pour les assemblages par platine d’about non raidie et où les poteaux sont aussi
non raidis, les constantes d'ajustement de courbe ont pour valeurs :
C1=8, 91 10-1
; C2=1, 20 104 ; C3=1, 75 8
K=
Dans le cas où les poteaux sont raidis:
C1= 1,79 ; C2= 1,76 ; C3= 2,04
K=
Le principal inconvénient de ce modèle est que, dans certains cas, la pente de la courbe de
moment-rotation peut devenir négative pour certaines valeurs de M [31]. Ceci est
physiquement, irréaliste et peut conduire à des difficultés numériques dans l'analyse
des ossatures si on utilise la formule de la rigidité tangente.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 36
par platine d’about
Tableau 2.1. Les constantes d'ajustement des courbes pour le modèle polynôme de Frye-
Morris (les paramètres géométriques sont en pouce), Moment en kip-inch et rotation en radian
Types d’assemblages Les constantes d’ajustements
de courbe
Le paramètre de
normalisation
Platine d’about sans
raidisseur de poteau
C1 = 1.83 ×
C2 = −1.04 ×
C3 = 6.38 ×
K =
Platine d’about avec
raidisseur de poteau C1 = 1.79 ×
C2 = 1.76 ×
C3 = 2.04 ×
K =
Cornière de semelle C1 = 8.46×
C2 = 1.01×
C3 = 1.24×
K =
Cornière de semelle avec
double cornières d’âme C1 = 2.23 ×
C2 = 1.85 ×
C3 = 3.19 ×
K =
(
Cornière d’âme
C1 = 4.28×
C2 = 1.45×
C3 = 1.51×
K =
Double cornière d’âme C1 = 3.66×
C2 = 1.15×
C3 = 4.57×
K =
Tronçon en Té C1 = 2.10 ×
C2 = 6.20 ×
C3 = −7.60 ×
K =

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 37
par platine d’about
Tableau 2.2. Les constantes d'ajustement des courbes pour le modèle polynôme de Frye-
Morris (les paramètres sont en centimètres), Moment en KN.m et rotation en radian
Types d’assemblages Les constantes d’ajustements
de courbe
Le paramètre de
normalisation
Platine d’about sans
raidisseur de poteau
C1 = 8.91 ×
C2 = −1.20 ×
C3 = 1.75 ×
K =
Platine d’about avec
raidisseur de poteau
C1 = 2.60 ×
C2 = 5.36 ×
C3 = 1.31 ×
K =
Cornières semelles C1 = 2.59 ×
C2 = 2.88 ×
C3 = 3.31 ×
K =
Cornières semelles avec
doubles cornières d’âme C1= 1.50 ×
C2 = 5.60 ×
C3 = 4.35 ×
K =
(
Doubles cornières d’âme C1 = 1.43 ×
C2 = 6.79 ×
C3 = 4.09 ×
K =
Une cornière d’âme
C1 = 1.67 × C2 = 8.56 ×
C3 = 1.35 ×
K =
Tronçons en Té C1 = 2.10 ×
C2 = 6.20 ×
C3 = −7.60 ×
K =
Tableau 2.3. Les constantes d'ajustement des courbes pour le modèle polynôme de Frye-
Morris [30]
Types
d’assemblages Les constantes d’ajustements de courbe (C1, C2, C3)
Le paramètre de
normalisation Les paramètres :(cm)
M (KN.cm) ;
Ø (radian).
Les paramètres (pouces)
M (kips.inch) ;
Ø (radian).
C1 = 1.83 ×
C2 = −1.04 ×
C3 = 6.38 ×
Platine d’about
sans raidisseur
de poteau
C1 = 8.92 ×
C2 = −12,03 ×
C3 = 17,53 ×
K =
Platine d’about
avec raidisseur
de poteau
C1 = 2.60 ×
C2 = 5.37 ×
C3 = 1.31 ×
C1 = 1.79 ×
C2 = 1.76 ×
C3 = 2.04 ×
K =

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 38
par platine d’about
Lb : distance entre les boulons des extrémités.
Tp : l’épaisseur de la platine d’about.
Tfc : l’épaisseur de la semelle d’âme.
2.2.3. Modèle de Krishnamurthy
Krishnamurthy [12] a conduit une vaste étude paramétrique au moyen d’un modèle
numérique 2D pour étudier le comportement des assemblages boulonnés par platine d’about
débordante. Des essais expérimentaux sur 5 spécimens ont été utilisés pour ajuster certains
des paramètres du modèle et valider les résultats obtenus à partir des simulations numériques.
Cette méthode a été développée pour le cas des assemblages boulonnés avec platine d’about
débordante ayant 4 rangées de boulons dans la zone tendue. (Fig. 2.3). La courbe moment-
rotation est décrite par un modèle de puissance qui s’écrit sous la forme suivante :
𝑀 (2.2)
Où
= 1, 58 C =
Où Wb est le module de résistance de la section transversale de la poutre, fy est la limite
d'élasticité du matériau de base des composantes de l’assemblage, fyb est la limite d'élasticité
de l’acier du boulon et Ab est la section transversale brute du boulon. Notons que les
références dont on dispose ne précisent pas si le module de résistance de la poutre est le
module plastique ou élastique.
Notons aussi que les caractéristiques géométriques du poteau ne sont pas considérées dans le
modèle représenté ci-dessus comme c’est le cas dans les simulations numériques. Pour cette
raison, la courbe moment-rotation est utilisée pour décrire le comportement de la zone
d’attache et non la zone d’assemblage qui sont décrit sur la figure.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 39
par platine d’about
Fig. 2.3. Paramètres géométriques du modèle de krishnamurthy [16]
2.2.4. Modèle Kukreti
Kukreti [15] a étendu la méthode de Krishnamurthy aux cas des assemblages boulonnés par
platine d’about non débordante et où les poteaux ne sont pas munis de raidisseurs. En
réalisant une nouvelle étude paramétrique basée aussi sur un modèle numérique par éléments
finis, il a proposé le modèle de puissance suivant :
𝑀 (2.3)
C =
Où les longueurs sont en pouces (inches) et les moments sont en kip-ft.
Cette méthode a été ensuite appliquée pour étudier le comportement des assemblages par
platine d'about débordante raidie au moyen d’une nervure et comportant huit boulons dans
la zone tendue.
Les modèles empiriques, basées sur le modèle de puissance de la courbe moment-rotation,
ont prouvés qu’ils sont en mesure de prédire avec une précision suffisante la partie linéaire de

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 40
par platine d’about
la courbe moment-rotation (comportement initial) plutôt que l’ensemble de la courbe et plus
particulièrement dans le domaine post-élastique. Il a été observé que l’écart entre les courbes
expérimentales et celles obtenus à partir des modèles de puissance est assez significatif pour
des valeurs élevées des déformations plastiques [16].
Fig. 2.4. Paramètres géométriques utilisés pour le modèle de Kuekrti [15]
2.2.5. Modèle d’Abolmaali [17]
Abolmaali [17] a développé deux modèles pour exprimer la relation entre le moment et la
rotation des assemblages boulonnées avec platine d’about non débordante. Le premier modèle
est basé sur l’équation de Ramberg-Osgood, initialement développé pour la modélisation non
linéaire de la relation contrainte-déformation. Selon ce modèle la relation moment-rotation est
exprimée par la formule suivante :
(𝜃 / 𝜃y) = (|𝑀|/ My) [1 + |𝑀| 𝑀 ] (2.4)

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 41
par platine d’about
Où My et y sont le moment et la rotation qui définissent un point de passage d’une famille de
courbes de Ramberg-Osgood dans la figure 2. ; est un paramètre sans dimension dépendant
du type d’assemblage et de la géométrie ;
Fig. 2.5. Modèle de Ramberg-Osgood proposé par Aboolmaali
Le modèle de Ramberg-Osgood exige seulement trois paramètres qui peuvent être calibrés à
partir des données expérimentales ou des résultats des simulations numériques. En procédant
à une analyse de régression, les paramètres de Ramberg-Osgood sont déterminés à partir des
formules suivantes :
(𝜃 / 𝜃y) = (|𝑀|/ My) [1 + |𝑀| 𝑀 ] (2.5)
Le deuxième modèle proposé par Abolmaali [17] est un modèle de puissance à trois
paramètres (The Three-Parameter Power model en anglais). Ce modèle a été initialement
proposé par Richard et Abbott [27] et Chen et Kishi [26,28] pour la caractérisation du
comportement des assemblages semi-rigides. Les trois paramètres qui définissent ce modèle
sont la rigidité initiale ki, le moment résistant de l’assemblage Mu et le paramètre de rigidité
. Le modèle s’exprime selon l’équation suivante :
M =
(2.6)

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 42
par platine d’about
=
est la rotation plastique de référence définie par :
La figure 2. représente le modèle de puissance à trois paramètres pour différentes valeurs du
paramètre de rigidité et qui montre que l’assemblage devient plus souple si on augmente les
valeurs de. Les paramètres des deux modèles ont été calibrés à partir de simulations
numériques effectuées sur 34 assemblages boulonnés par platine d’about non débordante. Les
courbes numériques obtenues ont été ajustées aux équations (2.5 et 2.6) en minimisant le carré
de leurs erreurs pour obtenir les paramètres My, y et pour le modèle de Ramberg-Osgood et
les paramètres Mu, 0 et pour le modèle de puissance à trois paramètres à partir des formules
suivantes :
𝑀 = (
(2.7)
𝜃 = (
(2.8)
= (
(2.9)
𝑀 = (
(2.10)
𝜃 = (
𝑀 𝑅 (
(2.11)
ζ = (
𝑀 𝑅 (
(2.12)

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 43
par platine d’about
Où
g : distance entre deux files verticales de boulons ;
db : diamètre nominal des boulons ;
pf : pince du boulon. La pince représente la distance entre le centre d'un boulon et l'arête de
la pièce.
pb : la largeur de la platine
tp : épaisseur de la platine
tf : épaisseur de la semelle de la poutre
tw : épaisseur de l'âme de la poutre
h : hauteur de la poutre
Fy = limite d'élasticité du matériau.
Fig. 2.6. Modèle de puissance à trois paramètres [17]
Il est à noter que les termes appartenant aux équations (2.7-2.11) et dont les puissances sont
proches de zéro ou de l’unité peuvent être négligés. A titre d’exemple, les termes (tw)0.009
et
(dm/d)1.011
qui font respectivement partie des équations (2.10) et (2.12) peuvent être
négligés.
A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 44
par platine d’about
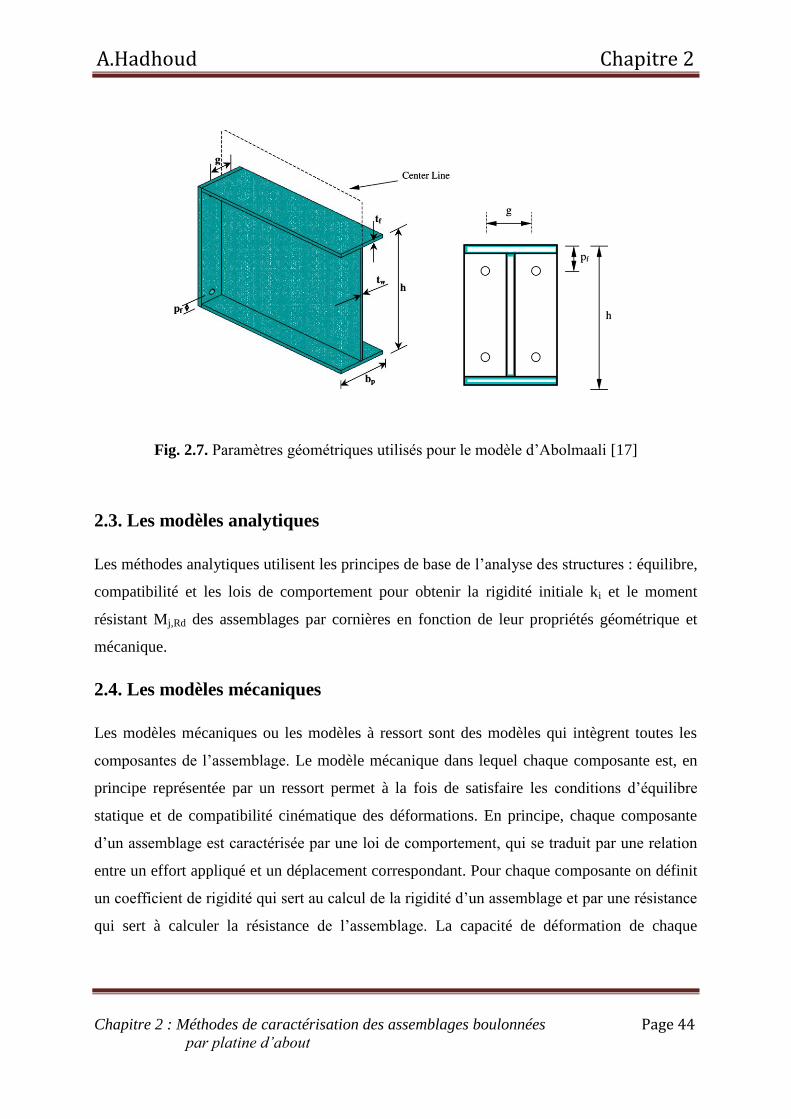
Fig. 2.7. Paramètres géométriques utilisés pour le modèle d’Abolmaali [17]
2.3. Les modèles analytiques
Les méthodes analytiques utilisent les principes de base de l’analyse des structures : équilibre,
compatibilité et les lois de comportement pour obtenir la rigidité initiale ki et le moment
résistant Mj,Rd des assemblages par cornières en fonction de leur propriétés géométrique et
mécanique.
2.4. Les modèles mécaniques
Les modèles mécaniques ou les modèles à ressort sont des modèles qui intègrent toutes les
composantes de l’assemblage. Le modèle mécanique dans lequel chaque composante est, en
principe représentée par un ressort permet à la fois de satisfaire les conditions d’équilibre
statique et de compatibilité cinématique des déformations. En principe, chaque composante
d’un assemblage est caractérisée par une loi de comportement, qui se traduit par une relation
entre un effort appliqué et un déplacement correspondant. Pour chaque composante on définit
un coefficient de rigidité qui sert au calcul de la rigidité d’un assemblage et par une résistance
qui sert à calculer la résistance de l’assemblage. La capacité de déformation de chaque

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 45
par platine d’about
composante doit normalement être établie. Pour développer un modèle mécanique, les étapes
suivantes sont nécessaires :
1) identifier les composantes de l’assemblage ayant une influence significative sur la
déformation et la rupture de celui-ci ;
2) définir une loi de comportement pour chaque composante de l’assemblage au moyen
d’une méthode analytique, numérique ou expérimentale ;
3) Assembler toutes les composantes pour obtenir la courbe moment-rotation entière de
l’assemblage.
La figure montre le modèle mécanique utilisé par Faella [24] pour un assemblage boulonné
par platine d’about débordante.
Fig. 2.8. Modèle mécanique utilisé pour un assemblage par platine d’about débordante [24]
La méthode de l’EC3 qui sera exposée dans le paragraphe suivant est une méthode hybride
combinant les modèles analytique et mécanique.
2.5. Approche de calcul des assemblages selon l’EC3
Cette approche qui s’appuie exclusivement sur le modèle mécanique ou la méthode des
composantes considère un assemblage comme un ensemble de composantes individuelles.
Chaque composante est représentée par un ressort ayant sa propre loi de comportement. Les-
composantes sont ensuite associées en série ou en parallèle selon la configuration
géométrique de l’assemblage, en respectant les compatibilités de déformation. Cette
association permet d’aboutir à un comportement en termes de courbe moment-rotation de

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 46
par platine d’about
l’assemblage. La méthode des composantes est suffisamment générale pour couvrir les-
assemblages les plus courants. L’EC3 adopte un certain nombre d’hypothèses simplificatrices
en vue de calculer le moment résistant et la rigidité d’un assemblage.
2.5.1. Caractérisation des assemblages
La loi de calcul moment-rotation d’un assemblage dépend des propriétés de ses composants
de base. Les assemblages poutre-poteau peuvent être constitués par un certain nombre des
composantes suivantes :
- panneau d'âme de poteau en cisaillement ;
- âme de poteau comprimée ;
- âme de poteau tendue ;
- semelle de poteau fléchie ;
- platine d'about fléchie ;
- cornière de semelle fléchie ;
- semelle et âme de poutre comprimées ;
- âme de poutre tendue ;
- platine tendue ou comprimée ;
- raidisseurs de semelle et d’âme de poteaux ;
- boulons tendus ;
- boulons en cisaillement ;
- boulons en pression diamétrale.
La méthode des composantes de la version EN 1993 de l’EC3 partie 1-8 [2] considère un
assemblage comme un ensemble de composantes élémentaires individuelles. Cette méthode
est basée sur les travaux publiés au début des années 80 par Zoetemeijer [36] et dont les
étapes de calcul peuvent se résumer comme suit :
distribution des efforts internes à travers les composantes de l’assemblage ;
évaluation de la résistance et la rigidité de chaque composante en fonction des
sollicitations auxquelles elles sont soumises ;
combinaison des caractéristiques des composantes de l’assemblage pour obtenir la
rigidité et la résistance de l’assemblage entier.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 47
par platine d’about
Le comportement réel de chaque composante est représenté par une courbe force-déplacement
de type non linéaire. La non linéarité est due à divers effets tels que la plasticité, le contact
entre les différents éléments et l'effet de membrane. Cependant, la version EN 1993-1-8[2] de
l’EC3 recommande, pour les calculs pratiques, l’utilisation d’un diagramme bilinéaire, pour la
caractérisation de chaque composante de l’assemblage, défini par trois paramètres :
- la résistance du calcul ;
- la rigidité k ;
- la capacité de déformation.
Fig. 2.9. Composantes de base de l'assemblage par platine d’about boulonnée
La liste des composantes de bases des assemblages couvertes par l’EN 1993-1-8 [2] avec la
référence aux règles d’application qu’il convient d’utiliser pour l’évaluation de leurs
propriétés structurales sont données dans le tableau 6.1 de cette norme.
De façon similaire, la courbe moment-rotation de l’assemblage, pour les calculs pratiques, est
de type bilinéaire (voir figure) et définie par les trois paramètres suivants :
- la rigidité en rotation initiale Sj,ini ;
- le moment résistant Mj,Rd ;
- la capacité de rotation cd.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 48
par platine d’about
2.5.2. Rappel sur la formulation de la rigidité initiale de l’assemblage
Selon l’EN 1993-1-8 [2], le comportement de chaque rangée de boulons r cumule les
contributions des différents composants (âme du poteau, semelle du poteau, boulons et
platine), avec leurs coefficients de rigidité ki,r associés en série (pour précision, l’unité de ki,r
est ici une longueur). On en déduit, au droit de chaque rangée, une rigidité efficace de valeur
= [
]
(2.13)
L’ensemble des rangées est ensuite ramené à un ressort unique de rigidité équivalente (figure
2.7) :
= ∑
(2.14)
Où n est le nombre de rangées de boulons tendus, hr la distance d’une rangée r au centre de la
semelle comprimée de la poutre, et zeq le bras de levier équivalent défini par :
= ∑
∑
(2.15)
Fig. 2.10. Modélisation de l’assemblage selon l’EN 1993-1-8 [2]
Les différents coefficients ki,r de rigidité sont explicités dans l’EN 1993-1-8. Le moment
transmis par l’assemblage équivaut statiquement à deux forces Feq telles que :

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 49
par platine d’about
M = Feq zeq
Par ailleurs, la rotation élastique de l’assemblage est donnée par :
(2.16)
Où eq est l’allongement du ressort unique de rigidité équivalent keq et c le
raccourcissement du ressort représentant la zone comprimée.
Des relations effort-déplacement des deux ressorts précédents à savoir
= E
= E
Où k2 est le coefficient de rigidité de la composante «âme comprimée du poteau » (prenant
une valeur infinie en présence d’un raidisseur transversal d’âme) et avec nécessairement :
Fc = – Feq,
On déduit immédiatement l’expression de la rigidité initiale (applicable au cas cruciforme à
chargement symétrique) :
=
(
) (2.17)
En présence d’un chargement non symétrique, l’expression (2.17) deviendrait :
=
(
) (2.18)
Où k1 serait le coefficient de rigidité du ressort représentant la déformation du panneau d’âme
du poteau en cisaillement.
La détermination manuelle du moment résistant MRd et de la rigidité Sini d’un assemblage
poutre-poteau boulonné par platine d’extrémité s’avère souvent assez longue et laborieuse.
C’est pourquoi un programme de calcul automatique sur ordinateur, intitulé SBCC (Software
Beam-Column Connection) a été mis au point à l’Université de Tébessa par Bouatrous
Soltani [37]. Le programme fournit les valeurs de MRd et Sini.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 50
par platine d’about
2.5.3. Classification des assemblages
Le comportement mécanique d’un assemblage poutre-poteau est caractérisé par trois
caractéristiques principales à savoir la résistance, la rigidité et la capacité de déformation
définit à partir de la courbe moment-rotation relative comme il est représentée dans la figure.
La capacité de rotation est une mesure de la déformation qui peut être atteinte avant que la
ruine, quelque part dans l'assemblage, ne provoque une chute de la résistance flexionnelle.
Cette courbe de comportement fait apparaitre les trois caractéristiques suivantes :
- un moment résistant de calcul Mj,Rd ;
- la rigidité initiale Sj,ini, qui est la pente de la partie élastique de la courbe de comportement, ou
la rigidité sécante Sj qui relie linéairement le moment transmis Mj,Ed et la rotation relative ,
tant que Mj,Ed ≤ Mj,Rd et ; ≤ Xd
- une capacité de rotation cd au-delà de laquelle le moment résistant de calcul MRd n’est
plus maintenu.
Fig. 2.11. Courbe de comportement «moment-rotation» d’un assemblage
Le comportement en rotation des assemblages réels est bien reconnu comme étant souvent
intermédiaire entre deux situations extrêmes, c'est-à-dire rigide ou articulé.
Lorsque toutes les différentes parties de l'assemblage sont suffisamment rigides (c'est-à-dire
idéalement infiniment rigides), l'assemblage est rigide, et il n'y a aucune différence entre les-
rotations respectives aux extrémités des éléments assemblés au niveau de cet assemblage.
L'assemblage subit une rotation unique globale en bloc qui est la rotation nodale des méthodes
d'analyse couramment utilisées pour les structures discontinues.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 51
par platine d’about
Si l'assemblage est dépourvu de toute rigidité, la poutre se conduit alors simplement comme si
elle avait des appuis libres quel que soit le comportement du ou des autre(s) élément(s)
assemblé(s). Il s'agit là d'un assemblage articulé.
Pour les cas intermédiaires (rigidité non nulle et non infinie), le moment transmis provoque
l'apparition d'une différence entre les rotations absolues des deux éléments assemblés. Dans
ce cas, l'assemblage est semi-rigide.
Le moyen le plus simple de représenter ce concept est un ressort de rotation (spirale) placé
entre les extrémités des deux éléments assemblés. La rigidité de rotation S de ce ressort est
le paramètre liant le moment transmis Mj à la rotation relative qui est la différence entre
les rotations absolues des deux éléments assemblés.
Fig. 2.12. Classification des assemblages en fonction de leur rigidité
2.6. Modélisations numériques des assemblages
Les simulations numériques sont actuellement très utilisées dans le but de réaliser les
objectifs suivants :
- comme un moyen de surmonter le manque de résultats expérimentaux ;
- pour comprendre les effets locaux importants qui ne peuvent être mesurés avec une
précision suffisante, tel que les forces de levier et les réactions de contact entre les
boulons et les composantes de l’assemblage ;
- possibilité de mener des études paramétriques approfondies.
La méthode des éléments finis est un moyen idéal pour construire la courbe moment-rotation.
Cependant, une telle analyse reste onéreuse. La courbe moment-rotation est le résultat
d’interactions complexes entre les différentes composantes des assemblages.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 52
par platine d’about
L’analyse des assemblages métalliques nécessitent l’introduction dans le modèle numérique
les considérations suivantes :
- les non linéarités géométriques et matérielles ;
- l’effet de la précontrainte sur le comportement axial des boulons ;
- interaction entre les boulons et les autres composantes de l’assemblage, tel que trou,
écrou et jarret;
- contraintes d’interface et les forces de frottement ;
- glissement provenant du jeu trou/boulon ;
- variabilité des zones de contact ;
- imperfections.
Actuellement, la méthode des éléments finis permet d’introduire dans le modèle numérique
les grands déplacements et/ou déformations, la plasticité, l’écrouissage isotrope ou
cinématique, les effets d’instabilité, contact entre l’écrou et la pièce ou rondelle.
Les modèles numériques proposés dans la littérature sont des simulations en 2D ou 3D.
Parmi les modèles 2D cités dans la littérature, on peut citer les travaux suivants.
Le modèle numérique en 2D proposé par Jenkins et al suppose que la déformation majeure de
l'assemblage est due à la flexion de la platine d’about car la semelle du poteau considérée était
épaisse et raidie, ce qui limite sa déformation. Ainsi seule la platine d’about est modélisée
par des éléments plaque avec des conditions aux limites spécifiques le long du profilé de
la poutre. Les boulons dans la zone tendue sont modélisés par des conditions de compatibilité
en fonction de leurs positions par rapport à la platine. Les boulons dans la zone comprimée
sont supposés n’avoir aucun effet sur le comportement de l’assemblage. La rotation de
l’assemblage est déterminée à partir des déplacements horizontaux de la semelle comprimée
de la poutre. La comparaison des résultats numériques et ceux des essais a montré que
le modèle proposé est peu fiable étant donné les hypothèses simplificatrices adoptées.
Bahaari et sherbourne [13] ont modélisé un assemblage par platine d’about avec quatre
rangées de boulons en utilisant des éléments finis bidimensionnel en contraintes planes pour
les parois de la poutre, du poteau et de la platine d’about et des éléments barre pour les-
boulons. Les éléments sont positionnés au niveau des plans moyens des parois. Le contact
platine d’about et semelle du poteau est modélisé à l’aide d’éléments d’interface. Le matériau
des parois de la poutre et du poteau ainsi que la platine d’about est modélisé à l’aide d’une loi

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 53
par platine d’about
de comportement bi-linéaire associé au critère de von Mises. Une loi de comportement tri-
linéaire est considérée pour la modélisation du matériau des boulons en zone tendue. La-
comparaison des courbes moment-rotation numériques et expérimentales, obtenues par
Jenkins [29], a montré l’existence d’un grand écart entre les courbes obtenues à partir des
deux approches.
De nos jours, les ordinateurs sont très performants, ce qui permet une modélisation
tridimensionnelle des assemblages. Les résultats sont plus précis mais reste toujours très
onéreux.
Krishnamurthy et Graddy [14] ont été les premiers à modéliser des assemblages
tridimensionnelles. L’assemblage par platine d’about a été modélisé en utilisant des éléments
volumiques à huit nœuds. Dans l’analyse était inclue les effets du contact entre les différents
composantes de l’assemblage et la précontrainte dans les boulons. Une démarche similaire a
été proposée par kukreti [15] pour modéliser le comportement des assemblages boulonnés.
Bahaari et sherbourne [18] ont proposé une modélisation tridimensionnelle pour étudier les
assemblages boulonnés par platine d’about débordante non raidie en utilisant des éléments de
coques. La tête de boulon et l’écrou n’ont pas été inclus dans le modèle. D’autre part,
l’épaisseur de la platine d’about ainsi que la semelle des poteaux ont été augmentées autour
des boulons. Le jarret boulonné est modélisé à l’aide des éléments de barre reliant aux nœuds
correspondants la platine d’about et la semelle du poteau. La surface de contact entre la
platine d’about et la semelle du poteau est modélisée en 3D à l’aide d’éléments d’interface.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 54
par platine d’about
Fig. 2.13. Modélisation 2-D de Bahhari et sherbourne [13]
Swanson et al ont présenté [20] les résultats d’une investigation par éléments finis du
comportement des tronçons de Té. Deux types de modélisation sont utilisés. Une
modélisation tridimensionnelle dans laquelle des éléments volumiques sont utilisés et une
modélisation bidimensionnelle constituée d’éléments rectangulaires et triangulaires. Les
modélisations proposées prennent en compte les non-linéarités géométrique et matérielle ainsi
que des conditions de contact.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 55
par platine d’about
Fig. 2.14. Modélisation 3-D du tronçon en Té de Swanson et al [20]
Maggi et al [21] ont mené études paramétriques pour étudier le comportement des
assemblages boulonnés par platine d’about débordante en utilisant un modèle numérique 3D.
Le modèle numérique a été calibré sur des résultats expérimentaux. Le modèle prend en
compte les non linéarités matérielles et les discontinuités géométriques, grands déplacements
et le contact entre les différents composants de l’assemblage. La comparaison des résultats
expérimentaux en termes de courbes moments-rotation a montré une bonne concordance entre
les résultats numériques et expérimentaux.
Fig. 2.15. Modèle numérique de Maggi et al [21]

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 56
par platine d’about
Tagawa et Gurel [22] ont utilisé des simulations numériques à partir du logiciel ANSYS
pour étudier la résistance des assemblages poutre-poteau métalliques raidis avec des profilés
en U boulonnés. Des éléments volumiques à 8 nœuds ont été utilisés pour modéliser tous
les composants de l’assemblage et la force de précontrainte dans les boulons a été prise en
compte.
Fig. 2.16. Modèle numérique de Tagawa et Gurel [22]
Les études expérimentales et numériques ont montré que la raidissage des assemblages en
acier par des profilés améliore significativement leur performance.
Diaz [25] a développé un modèle numérique 3D pour étudier le comportement des
assemblages boulonnés poteau-poutre par platine d’about débordante. Tous les composants de
l’assemblage ont été modélisés par des éléments volumiques à 8 nœuds avec intégration
complète. Les surfaces de contact ont toutes été modélisées par des éléments de contact. Les
résultats obtenus concordaient parfaitement avec les résultats expérimentaux disponibles dans
la littérature. Les résultats obtenus ont été utilisés pour des besoins de dimensionnement et
d’optimisation des assemblages semi-rigides.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 57
par platine d’about
Fig. 2.17. Modèle numérique de Diaz [25]
Mohamedi-shooreh et Mofid [23] ont publié les résultats de plusieurs études paramétriques
concernant la rigidité initiale des assemblages boulonnés avec platine d’about non débordante
en utilisant des simulations avec des éléments volumiques à 20 nœuds et en tenant compte du
comportement du matériau, des discontinuités géométriques et les grands déplacements. Le
modèle a été validé par une comparaison avec des données expérimentales tirées de la
littérature. La comparaison des résultats a montré une bonne corrélation entre les résultats du
modèle et les données expérimentales.

A.Hadhoud Chapitre 2
Chapitre 2 : Méthodes de caractérisation des assemblages boulonnées Page 58
par platine d’about
Fig. 2.18. Modèle numérique de Mohamedi-shooreh et Mofid [23]
2.7. Conclusion
Dans ce chapitre, une certaine importance est donnée à plusieurs méthodes de prédiction du
comportement des courbes moment-rotation des assemblages boulonnés avec platine d’about.
Ce chapitre met l'accent aussi sur l'importance d'intégrer le comportement non linéaire des
assemblages dans l'analyse des constructions en acier. À cette fin, l'analyse doit choisir un
modèle d’assemblage approprié qui représente de façon adéquate le comportement réel des
assemblages.
Pour des raisons pratiques, le choix d'un modèle d’assemblage doit être guidé par sa précision,
sa simplicité. Étant donné que tous les assemblages avec tous les détails possibles et les
dimensions ont été testées et documentées, l'utilisation d'un modèle analytique simple est tout
à fait justifiée.
Ces modèles sont basés sur les paramètres d’assemblage qui peuvent être déterminés
facilement à partir de la configuration de l’assemblage et du comportement du matériau.
Les exigences des codes actuels et des recommandations penchent sur l’étude des
assemblages comme les sources primaires du comportement inélastique de la structure.
Cependant, comme indiqué dans cette recherche bibliographique, très peu de travaux
fournissent un modèle qui décrit le comportement réel des assemblages, sauf les résultats des
essais expérimentaux qui restent coûteux.

CHAPITRE 3
Etude comparative entre des résultats
expérimentaux et des résultats issus
de diverses méthodes empiriques et
analytiques

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 59
de diverses méthodes empiriques et analytiques
CHAPITRE 3
Etude comparative entre des résultats expérimentaux et des résultats
issus de diverses méthodes empiriques et analytiques
3.1. Introduction
Durant la dernière décennie, plusieurs travaux de recherches expérimentales, analytiques et
numériques ont été effectués pour étudier l’influence de la configuration des assemblages sur leur
comportement et qui ne fournissent, dans la majorité des cas, que des informations limitées vu le
nombre important des paramètres géométriques et mécaniques à considérer. Parmi ces paramètres, on
peut citer, par exemple, la présence des raidisseurs de platine d’about dans les zones tendue et
comprimée dont l’influence peut être considérable. Les essais expérimentaux sur les assemblages
boulonnés, étant très couteux, restent limités en nombre et ne sont utilisés que pour calibrer ou valider
des méthodes analytiques, empiriques ou numériques.
Dans ce paragraphe, nous présentons un certain nombre de compagnes d’essais menés sur des
assemblages poteau-poutre en acier avec platine d’about débordante ou non. Ensuite nous allons
comparer entre les courbes moment-rotation obtenues à partir de ces essais et un nombre de méthodes
empiriques publiées dans la littérature.
3.2. Essai d’Abidelah [31]
3.2.1. Programme expérimental
Quatre types d’assemblages métalliques poteau-poutre boulonnées avec platines d’about débordantes
ou non débordantes, avec ou sans raidisseurs de platine, ont été testés par Abidelah [31] à l’université
Pascal de Clermont-Ferrand. La figure 3.1 montre les configurations détaillées des différents
assemblages testées.
Le premier spécimen (FS1) est un assemblage par platine d’about non débordante avec trois rangées de
boulons. Le deuxième spécimen (FS2) est un assemblage par platine d’about débordante dans sa zone
tendue. Le troisième spécimen (FS3) est un assemblage de géométrie identique à celui de l’assemblage
(FS2), mais dont la platine est raidie dans la zone tendue. Le quatrième spécimen (FS4) est un
assemblage par platine d’about débordante sur les deux côtés et raidie dans les zones tendue et
comprimée.

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 60
de diverses méthodes empiriques et analytiques
Pour les quatre assemblages testés, les poteaux sont des profilés HEA 120 les poutres sont des profilés
IPE 240 et la platine d’about a une épaisseur de 15 mm. Les boulons utilisés sont de type M16 de
classe 8-8. Les liaisons semelle-platine et âme-platine ont été réalisées par des soudures bout à bout
avec deux cordons égaux ayant une épaisseur moyenne égale à 6 mm. A partir des caractéristiques
géométriques, on peut observer que le spécimen FS2 peut être considéré comme un spécimen de
référence. Le reste des spécimens peut être déduit par simple modification d’un ou deux paramètres à
partir du spécimen de référence FS2.
Fig. 3.1. Configuration des différents spécimens testés
La géométrie réelle des divers éléments de l’assemblage a été mesurée et enregistrée avant de
commencer l'essai. Pour les divers spécimens, la géométrie de l’assemblage est représentée sur la
figure 3.2. Les dimensions réelles des profils et des platines d'abouts de l'assemblage sont récapitulés
dans le tableau 3.1.

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 61
de diverses méthodes empiriques et analytiques
Fig.3.2. Caractéristiques des assemblages
Tableau 3.1. Caractéristiques géométriques des éléments de l’assemblage (mm)
Test Platine d’about Raidisseur de
platine
Nombre
Boulons
Raidisseur
bs hs ts
FS1 Non Non 6 - - -
FS2 Débordante Non 6 - - -
FS3 Débordante Oui 6 75 80 10
FS4 Débordante Oui 6 75 80 10

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 62
de diverses méthodes empiriques et analytiques
Fig.3.3. Configuration de l'assemblage FS1
Tableau 3.2. Caractéristiques géométriques de l'assemblage FS1

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 63
de diverses méthodes empiriques et analytiques
Fig.3.4. Configuration de l'assemblage FS2
Tableau.3.3. Caractéristiques géométriques de l'assemblage FS2

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 64
de diverses méthodes empiriques et analytiques
Fig. 3.5. Configuration de l'assemblage FS3
Tableau. 3.4. Caractéristiques géométriques de l'assemblage FS3

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 65
de diverses méthodes empiriques et analytiques
Fig. 3.6. Configuration de l'assemblage FS4
Tableau.3.5. Caractéristiques géométriques de l'assemblage FS4
3.2.2. Propriétés mécaniques des matériaux
Toutes les composantes de l’assemblage sont en acier de nuance S235. Les caractéristiques
mécaniques réelles des aciers (tableau 3.6), ont été obtenues à partir d’essais de traction sur des
éprouvettes prélevées dans l’âme et la semelle des profilés métalliques, dans la platine d’about et dans
les raidisseurs. Deux boulons usinés ont été testés en traction pour déterminer les propriétés
mécaniques de leurs matériaux.
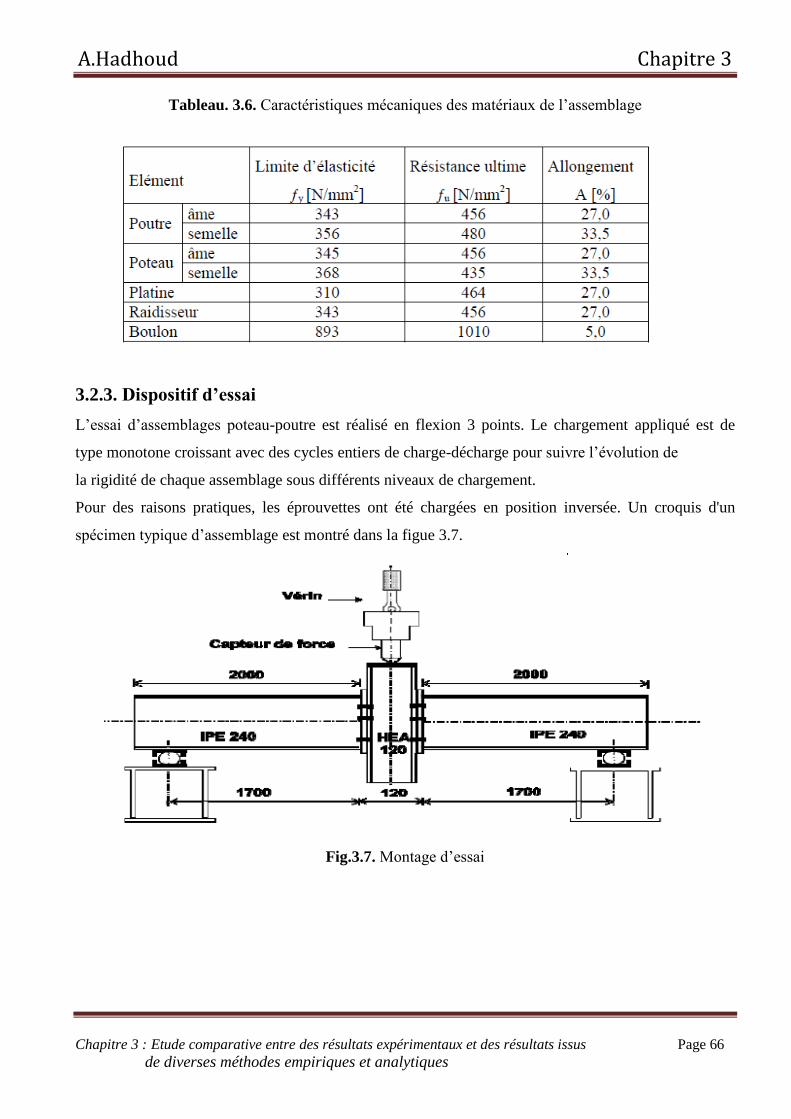
A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 66
de diverses méthodes empiriques et analytiques
Tableau. 3.6. Caractéristiques mécaniques des matériaux de l’assemblage
3.2.3. Dispositif d’essai
L’essai d’assemblages poteau-poutre est réalisé en flexion 3 points. Le chargement appliqué est de
type monotone croissant avec des cycles entiers de charge-décharge pour suivre l’évolution de
la rigidité de chaque assemblage sous différents niveaux de chargement.
Pour des raisons pratiques, les éprouvettes ont été chargées en position inversée. Un croquis d'un
spécimen typique d’assemblage est montré dans la figue 3.7.
Fig.3.7. Montage d’essai

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 67
de diverses méthodes empiriques et analytiques
Fig. 3.8. Vue de l’assemblage en vraie grandeur
Le système d’appui est assuré par deux articulations mécaniques situées aux extrémités des poutres,
tandis que la charge est appliquée sur la partie supérieure du poteau. Un dispositif de maintien latéral
est présent pour éviter le déversement des poutres. Le système de mise en charge se compose d'un
vérin piloté par un dispositif électronique. Les mesures sont enregistrées de façon continue. Dans le
cas présent, les essais ont été menés en contrôlant les déplacements afin de pouvoir suivre les parties
descendantes sur les courbes force-déplacement.
Les moyens de mesure utilisés sont constitués de dispositifs de mesures traditionnelles (inclinomètres,
capteurs de forces, capteurs de déplacements) et un système de mesure sans contact constitué de deux
caméras a été utilisé pour mesurer les déplacements des cibles tout au long de d’essai.
Fig. 3.9. Instrumentation des spécimens testés

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 68
de diverses méthodes empiriques et analytiques
3.3. Essais d’Aribert [8]
3.3.1. Description des essais
Les caractéristiques générales des six assemblages testés ainsi que les principaux paramètres étudiés
sont donnés au tableau 1 (où nt est le nombre total de rangées de boulons). A la figure 3.10, on précise
les schémas détaillés des platines des différents spécimens. Pour la réalisation de la liaison poutre-
platine, on a utilisé une soudure de qualité basique SAFER NF 510 (Re = 465 MPa, A % = 20) et les
cordons d’angle ont été dimensionnés conformément à l’annexe M de l’EC3. Les boulons ont été
serrés au tiers de la valeur de précontrainte nominale spécifiée dans l’Eurocode 3, sous contrôle d’une
clé dynamométrique; cette disposition a été jugée correspondre approximativement à un serrage
manuel.
Fig. 3.10. Configuration générale des assemblages

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 69
de diverses méthodes empiriques et analytiques
3.3.2. Propriétés mécaniques des matériaux des essais
Tableau 3.7. (a) Liste des assemblages étudies

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 70
de diverses méthodes empiriques et analytiques
(b) Caractéristiques mécaniques mesurées des éléments
3.3.3. Dispositif d’essai
Le dispositif d’essai utilisé pour les six assemblages est présenté à la figure 2. La charge est appliquée
à l’aide d’un vérin par l’intermédiaire d’une plaque soudée sur le dessus du poteau, et les poutres
reposent à leurs extrémités sur deux appuis à rouleaux de façon à conserver une symétrie aussi parfaite
que possible à l’essai. Un dispositif de contreventement et un guidage vertical efficace du piston du
vérin ont été également mis en place.

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 71
de diverses méthodes empiriques et analytiques
Fig. 3.11. Dispositif d’essai
La figure 3.12 montre le dispositif général de mesure des déplacements et des déformations utilisé
pour les différents essais.
Fig. 3.12. Instruments de mesure

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 72
de diverses méthodes empiriques et analytiques
3.4. Essai d’Augusto [32]
3.4.1. Description des essais
Un ensemble d’essais expérimentaux [34] ont été réalisés à l'Université de Coimbra ont été utilisées
pour calibrer le modèle numérique publié dans l’article de Luís Simões da Silva [32,33].
Les assemblages testés ont été conçus dans le but d'étudier le comportement d’assemblages poutre-
poteau boulonnés à résistance partielle avec platine d’about débordante sur les deux côtés. Les essais
ont été effectués sur quatre spécimens d’assemblages boulonnés avec platine d’about débordante
dénommés J1, J2, J3 et J4 en faisant varier les sections des poutres et des poteaux. Les configurations
des assemblages J1 et J2 sont similaires et leur différence réside dans le fait que le montant de
l’assemblage J2 est soumis un effort normal. Toutes les platines d’about ont une épaisseur égale à 18
mm. Des soudures continues d’angle, présentant une configuration à 45° réalisées en atelier, ont été
utilisées pour assembler la platine aux semelles et l’âme de la poutre. Les assemblages se différent
donc par la géométrie des profilés des poutres et des poteaux.
Les figures 3.13-3.15 montrent les schémas détaillés des configurations d’assemblages des différents
spécimens. La nuance d’acier utilisée est S355 pour les poutres, les poteaux et la platine d’about, et
S235 pour les raidisseurs. Les boulons sont de type M24 de classe (10.9) ayant pour résistance ultime
fu = 1170 MPa et un module de déformation longitudinale Em = 213 GPa.
Fig. 3.13. Configuration générale des assemblages J1 et J2

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 73
de diverses méthodes empiriques et analytiques
Fig. 3.14. Configuration générale de l’assemblage J3
Fig. 3.15. Configuration générale de l’assemblage J4
3.4.2. Propriétés mécaniques des matériaux
Les caractéristiques mécaniques des aciers ont été déterminées en effectuant des essais de traction sur
des éprouvettes prélevées de l’âme et de la semelle des poutres et des poteaux ainsi que de la platine
d’about. Les différentes caractéristiques mécaniques des matériaux mesurées sont représentées dans
le tableau 3.8.

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 74
de diverses méthodes empiriques et analytiques
Tableau 3.8. Caractéristiques mécaniques des matériaux de l’assemblage
Elément Composantes Limite
d’élasticité
(fym)MPa
Résistance
ultime (fu)
MPa
fum
MPa
Em
GPa
E
GPa
IPE360 semelle
âme
430
448,2
490
490
554,2
552,9
206,
213
210
210
HEB320 semelle
âme
393,9
398,8
490
490
520,7
521,1
208
216
210
210
HEA320 semelle
âme
414,8
449,6
490
490
531,4
553,4
204
207
210
210
HEA280 Semelle
âme
439,7
461,7
490
490
547,7
575,9
209
210
210
210
Platine
220
Platine300
405,1
392,9
490
490
534
523
210
208
210
210
Raidisseur 286,4 260 451,8 205 210
3.4.3. Dispositif d’essai
Le chargement a été appliqué de façon monotone et a été contrôlé en déplacement.
La figure 3.16 montre le dispositif général de mesure des déplacements et des déformations utilisé
pour les différents essais. 3.16.
Les poteaux ont une hauteur de 3 m et la poutre a une portée d’environ 1.2 m . Le chargement a été
appliqué dans la direction verticale, à l'extrémité de la poutre en console au moyen d'un vérin
hydraulique ayant une capacité de charge maximale de 100 tonnes. Le dispositif d’essai comprend
aussi un mur sur le côté gauche qui fournit un appui latéral, une poutre située au sommet, et un
portique en acier encastré dans le plancher sur le côté droit comme il est montré sur la figure 3.16(b).

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 75
de diverses méthodes empiriques et analytiques
(a) (b)
Fig. 3.16. Dispositif d’essai et instruments de mesure
Les pieds de poteaux sont liaisonnés à des massifs de fondation en béton armé au moyen de rotules
mécaniques. Au sommet, la liaison entre le spécimen et la poutre métallique ne s’oppose pas au
déplacement vertical.
3.5. Essais de Coelho [35]
3.5.1. Description des essais
Le programme expérimental réalisé par Coelho [35] comprend quatre assemblages unilatéraux
boulonnés avec platine d’about débordante. Les quatre assemblages testés se différencient par
l’épaisseur et la nuance d’acier de la platine d’about.
Les boulons utilisés sont de type M20 de classe 8.8 à serrage contrôlé manuellement et où les trous de
perçage des boulons un diamètre de 22 mm. Les liaisons semelle-platine et âme-platine ont été
réalisées par des soudures bout à bout, à pleine pénétration par un double cordon d’angle. Les
caractéristiques géométriques des assemblages testés sont montrées sur la figure 3.17. Le profilé HEM
340 pour les poteaux a été choisi dans le but d’avoir des poteaux qui se comportent quasiment d’une
manière rigide. La hauteur des poteaux de part et d’autre de la platine d’about est de 400 mm. Tous les
assemblages ont été dimensionnés selon l’EN 1993-1-8 [10] de sorte que les composantes de
l’assemblage ainsi que les boulons dans la zone tendue soient les facteurs déterminants de ruine.
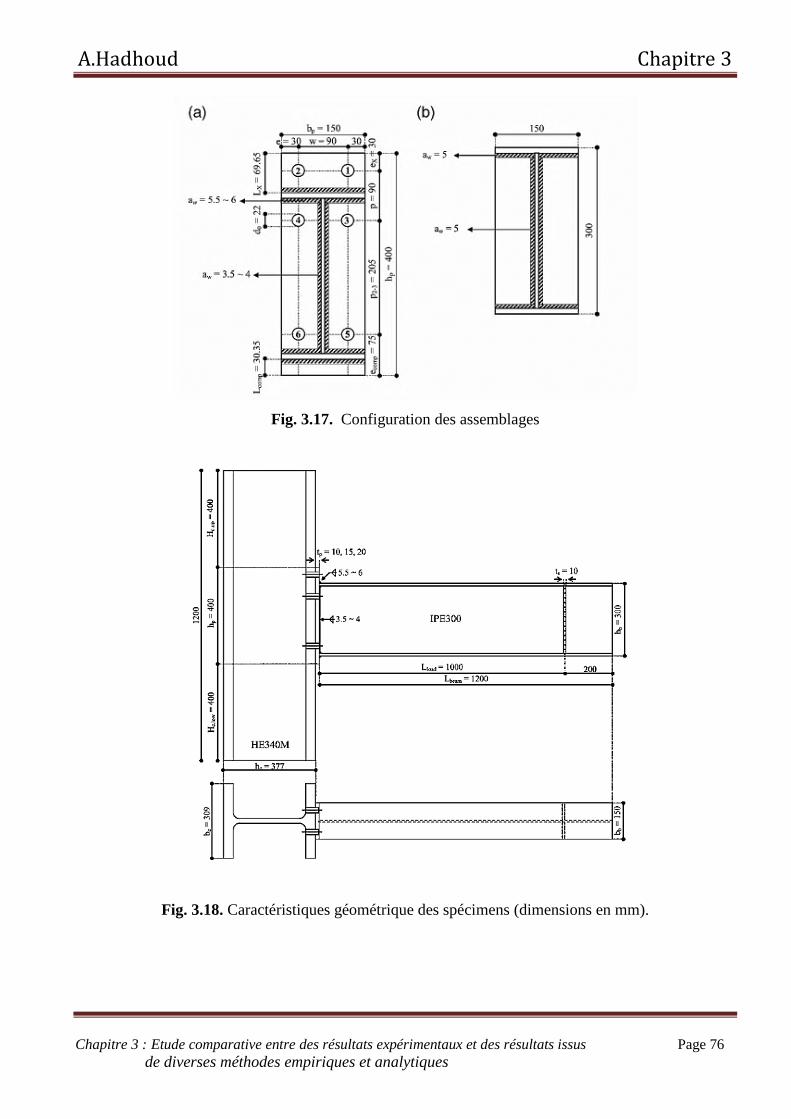
A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 76
de diverses méthodes empiriques et analytiques
Fig. 3.17. Configuration des assemblages
Fig. 3.18. Caractéristiques géométrique des spécimens (dimensions en mm).

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 77
de diverses méthodes empiriques et analytiques
3.5.2. Propriétés géométriques et mécaniques des matériaux des essais
Les caractéristiques mécaniques moyennes obtenues à partir des essais de traction sur des éprouvettes
sont résumés dans le tableau 3.9.
Tableau 3.9. Caractéristiques mécaniques des matériaux de l’assemblage (mm)
Test Poteau fy
MPa
Poutre fy
MPa
Platine d’about fy
MPa
Raidisseur
ts tp hp bp
FS1 HEM
340
S355 IPE300 S235 10 401 149 S355 10,76
FS2 HEM
340
S355 IPE300 S235 15 400 149 S355 10,50
FS3 HEM
340
S355 IPE300 S235 20 401 150 S355 10,46
FS4 HEM
340
S355 IPE300 S235 10 401 149 S690 10,42
3.5.3. Dispositif d’essai
Avant le commencement de l’essai, les dimensions réelles des plaques ainsi que la force de
précontrainte dans les boulons tendus ont été enregistrées. La charge a été appliquée par paliers de
façon monotone à l’extrémité de la poutre. Le chargement est contrôlé en déplacement avec une
vitesse constante de 0.02 mm/s jusqu’à la ruine. L’essai commence par appliquer la charge au moyen
d’un vérin hydraulique de capacité jusqu’à ce que le moment atteint la valeur 2/3 Mj,Rd, valeur qui
correspond à la limite du comportement élastique et où Mj,Rd est le moment de résistance plastique de
l’assemblage selon les notations de l’EC3. Ensuite, il s’ensuit une décharge complète suivi d’une
recharge jusqu’à la ruine. Le dispositif d’essai est représenté ainsi que les moyens de mesure sont
montrés à la figure 3.18.
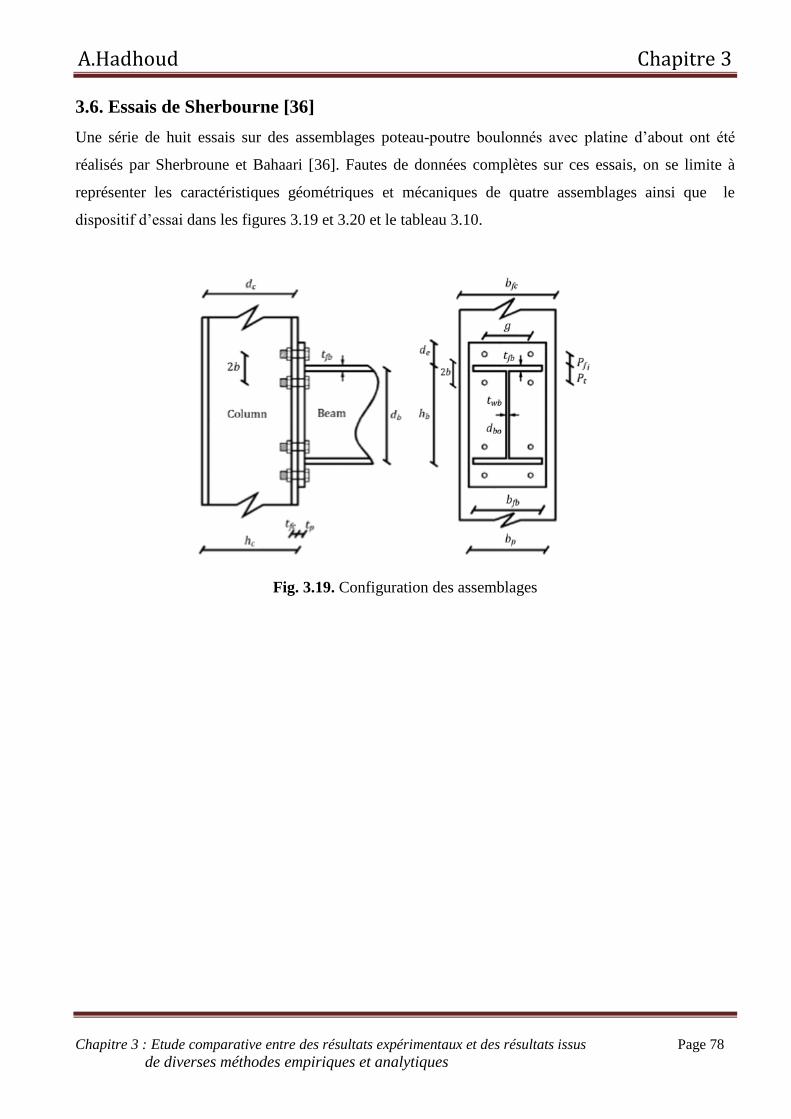
A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 78
de diverses méthodes empiriques et analytiques
3.6. Essais de Sherbourne [36]
Une série de huit essais sur des assemblages poteau-poutre boulonnés avec platine d’about ont été
réalisés par Sherbroune et Bahaari [36]. Fautes de données complètes sur ces essais, on se limite à
représenter les caractéristiques géométriques et mécaniques de quatre assemblages ainsi que le
dispositif d’essai dans les figures 3.19 et 3.20 et le tableau 3.10.
Fig. 3.19. Configuration des assemblages

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 79
de diverses méthodes empiriques et analytiques
Tableau 3.10. Caractéristiques géométriques en mm et mécaniques des matériaux de l’assemblage
Poutre
Poteau
de b g pt tp
MPa
MPa
W410
300
W200
300 210 126 72 120 24 59,8 83,2 30
24
15
40
300
627
W610
250 W360
250 204 90 54 140 25,4 41,7 65,9
22
250
802
W460
250 W250
250 194 124 68 120 24 53 82,2
15
250
627
W410
300 W200
300 203 126 72 120 24 59,8 83,2
24
300 627

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 80
de diverses méthodes empiriques et analytiques
Fig. 3.20. Dispositif d’essai [21]
3.7. Comparaison entre les résultats expérimentaux avec ceux issus des modèles
empiriques.
L’objet de ce paragraphe est d’évaluer la précision des modèles empiriques en comparant les courbes
moment-rotation obtenues avec ces modèles avec ceux des essais expérimentaux décris ci-dessus.
Parmi les modèles exposés au chapitre II, nous avons considéré :
- le modèle de Frye-Morris ;
- le modèle de Kurketi ;
- le modèle de Krishnamurti.
Les courbes issues des modèles empiriques ont pour ordonnées les moments obtenus
expérimentalement et pour abscisse les rotations relatives des assemblages dues à ces moments.

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 81
de diverses méthodes empiriques et analytiques
3.7.1. Comparaison avec les essais d’Abidellah
3.7.1.1. Spécimen FS1
Le spécimen FS1 est assemblage boulonnées avec platine d’about non débordante. La courbe moment-
rotation peut être déterminé à l’aide des modèles de Frye-Morris [11] et de Kukerti [15] ou de l’ENV
1993-1-8. La figure 3.22 montre que le modèle de kurketi [15] donne des rotations très faible par
rapport à celles obtenues expérimentalement. L’écart devient plus important avec l’augmentation du
moment fléchissant. Le moment résistant calculé par la méthode de l’EC3 [2] est largement inférieur à
celui enregistré lors de l’essai. Ce qui implique que la méthode de l’EC3 est du côté de sécurité pour le
cas de ce spécimen. L’EC3 ne fournit aucune indication sur la capacité de rotation. On ne peut donc
comparer cette dernière avec celle obtenue lors de l’essai. Concernant la rigidité initiale, l’écart entre
la valeur obtenue par la méthode de l’EC3 et celle déterminée à partir de la courbe de l’essai est
faible. La courbe 3.21 montre que les rotations obtenues à partir du modèle de Frye-Morris sont très
loin des valeurs obtenues lors de l’essai.
Fig. 3.21. Courbe moment-rotation obtenue à partir du modèle de Frye-Morris [11]
0
5
10
15
20
25
30
35
40
45
50
0 50 100 150 200
M(KN.m)
Ø (rad)

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 82
de diverses méthodes empiriques et analytiques
Fig. 3.22. Comparaison entre la courbe expérimentale et celles obtenues avec les modèle de Kukreti
[15] et de l’EC3 [2]
3.7.1.2. Spécimen FS2
Le spécimen FS2 est un assemblage boulonné avec platine d’about débordante. On peut donc lui
appliquer la méthode de Frye-Morris [11] et de Krishnamurti [12]. Nous pouvons observer sur la
figure 3.24 que la courbe moment-rotation expérimentale et celle issue du modèle de Krishnamurti
[12] coïncident pour des valeurs faible du moment transmis par l’assemblage. Au fur et à mesure que
le moment augmente l’écart entre les deux courbes devient plus important. Le modèle de
Krishnamurti [12] conduit à un comportement moins rigide que celui enregistré lors de l’essai.
Les rotations obtenues par le modèle de Frye-Morris [11] (figure 3.23) sont moins élevées que celles
obtenues pour le modèle FS1, mais reste tout de même élevées par rapport aux résultats de l’essai.
La platine d’about du spécimen FS2 étant débordante, on obtient avec la méthode des composantes de
l’EC3 un moment résistant plus élevé que celui du spécimen FS2, mais près de deux fois moins
inférieur que celui enregistré lors de l’essai.
0
5
10
15
20
25
30
35
40
45
50
0 0,01 0,02 0,03 0,04 0,05 0,06
M (
KN
.m)
Ø (rad)
Essai
Kukreti
EC3

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 83
de diverses méthodes empiriques et analytiques
Fig. 3.23. Courbe moment-rotation selon le modèle de de Frye- Morris [11]
Fig. 3.24. Comparaison entre la courbe expérimentale et celle obtenue avec le modèle de
Krishnamurti [12] et de l’EC3 [2]
3.7.1.3. Spécimen FS3
Le spécimen FS3 comporte une platine d’about débordante. Comme nous pouvons l’observer sur la
figure 3.26, on peut en déduire pour le spécimen FS3 les mêmes conclusions que celles obtenues pour
le spécimen FS2. Ceci a été prévisible étant donné que les deux spécimens sont identiques à la seule
différence que la platine d’about du spécimen FS3 comporte un raidisseur. Selon les résultats des
essais, la présence d’un raidisseur dans la zone tendue a pour effet d’augmenter légèrement le moment
0
10
20
30
40
50
60
70
0 2 4 6 8 10 12 14
M (
KN
.m)
Ø (rad)
0
10
20
30
40
50
60
70
0 0,02 0,04 0,06
M (
KN
.m)
Ø (rad)
Essai
Krishnamurti
EC3

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 84
de diverses méthodes empiriques et analytiques
résistant, mais sans grand effet sur la rigidité initiale de l’assemblage. Comme pour les assemblages
précédents, le modèle de Frye-Morris [11] fourni des rotations très élevées par rapport à celles
enregistrées lors de l’essai (figure 3.25).
Fig. 3.25 Courbe moment-rotation selon le modèle de de Frye-Morris [11]
Fig. 3.26. Comparaison entre la courbe expérimentale et celle obtenue avec le modèle de Kukreti [15]
et de l’EC3 [2]
0
10
20
30
40
50
60
70
0 5 10 15 20
M (
KN
.m)
Ø (rad)
0
10
20
30
40
50
60
70
0 0,02 0,04 0,06 0,08
M (
KN
.m)
Ø (rad)
Ess…

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 85
de diverses méthodes empiriques et analytiques
3.7.1.4. Spécimen FS4
La configuration du spécimen FS4 est similaire à celle des deux spécimens précédents, à la différence
que la platine d’about est raidie dans la zone tendue et dans la zone comprimée. La figure 3.27 montre
que les modèles de Krishnamurti [12] et de Frye-Morris [11] donnent des rotations similaires aux
rotations obtenues aux essais lorsque le moment est inférieur à environ 50% du moment maximum.
Au-delà de ce moment, l’écart devient plus important et plus particulièrement dans le cas du modèle
de Frye-Morris [11]. Il existe un écart non négligeable entre les rotations obtenues par le modèle de
l’EC3 [2] et les rotations enregistrées à l’essai lorsque le moment est inférieur au moment résistant
(figure 3.28). Le moment résistant calculé par le modèle de l’EC3 [2] est nettement inférieure à celui
enregistré à l’essai.
Fig. 3.27. Comparaison entre la courbe moment-rotation expérimentale et celles obtenues avec les
modèles de Krishnamurty [12] et de Frye-Morris [11]
0
10
20
30
40
50
60
70
80
90
0 0,1 0,2 0,3 0,4 0,5 0,6
M (
KN
.m)
Ø rad)
Essai
Frye-morris
Krishnamurti

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 86
de diverses méthodes empiriques et analytiques
Fig. 3.28. Comparaison entre la courbe moment-rotation expérimentale et celle obtenue avec le modèle
de l’EC3 [2]
3.7.2. Comparaison avec les essais d’Aribert [8]
Les figures 3.29, 3.30, 3.31, 3.32 et 3.33 comparent entre la courbe expérimentale et celles obtenues à
partir des modèles de Frye-Morris [11], Kukerti [15] et de l’EC3 [2]. On peut constater, en général,
que les modèles de Kukerti et de l’EC3 donnent des résultats satisfaisants pour des valeurs faibles du
moment fléchissant. Ces méthodes permettent donc de calculer de façon plus ou moins précise de la
rigidité initiale La méthode de Kukerti [15] conduit dans tous les cas à des modèles plus rigides que les
assemblages testés. Le modèle de l’EC3 [2] donnent, comme dans le cas des essais menés par
Abidellah [31], à des moments résistants du côté de sécurité. Le modèle de Frye-Morris [11] donne
dans tous les cas des rotations loin de celles obtenues à l’essai. Lorsque l’écart est très important les
courbes issues du modèle de Frye-Morris [11] ne sont pas représentées dans les figures ci-dessous.
0
10
20
30
40
50
60
70
80
90
0 0,01 0,02 0,03 0,04 0,05 0,06 0,07
M (
KN
.m)
Ø (rad)
Essai
EC3

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 87
de diverses méthodes empiriques et analytiques
Fig. 3.29. Spécimen RA1
Fig. 3.30. Spécimen RA3
0
20
40
60
80
100
120
140
160
180
0 0,05 0,1 0,15 0,2 0,25 0,3
M (
KN
.m)
Ø ( rad )
Essai
Frye- Morris
EC3
Kukreti
0
10
20
30
40
50
60
70
0 0,02 0,04 0,06 0,08
M (
KN
.m)
Ø (rad)
Essai
Kukreti
EC3
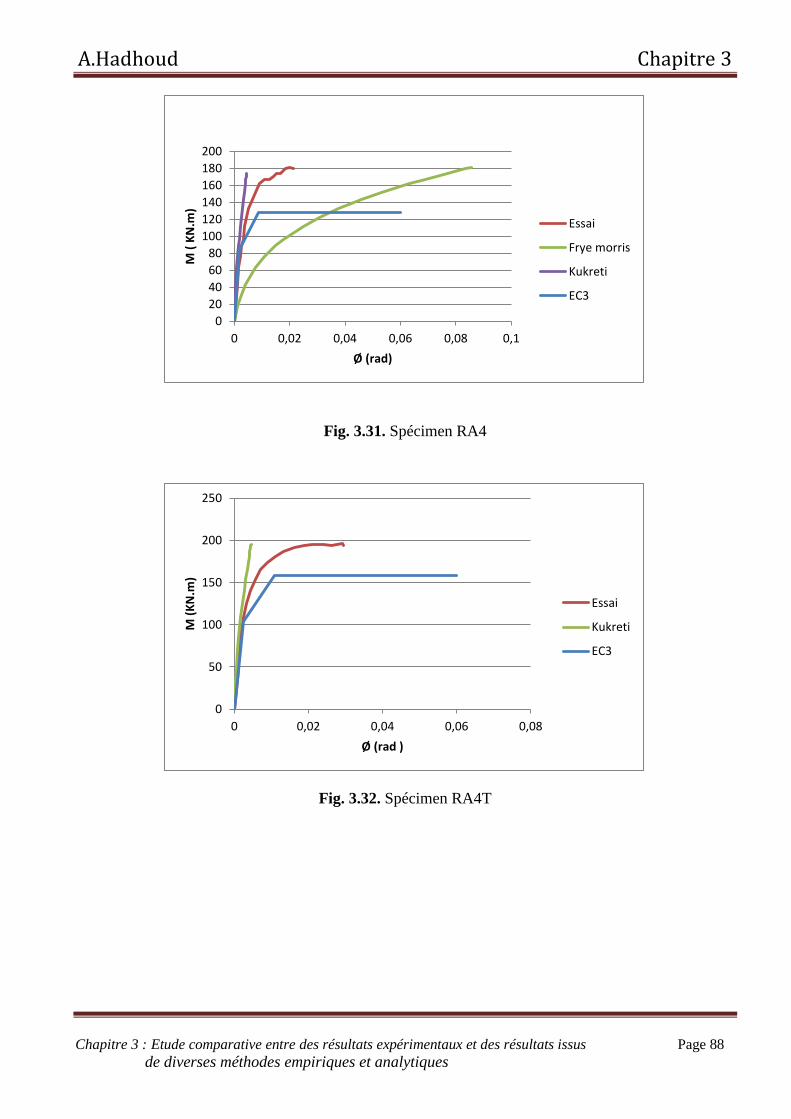
A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 88
de diverses méthodes empiriques et analytiques
Fig. 3.31. Spécimen RA4
Fig. 3.32. Spécimen RA4T
0
20
40
60
80
100
120
140
160
180
200
0 0,02 0,04 0,06 0,08 0,1
M (
KN
.m)
Ø (rad)
Essai
Frye morris
Kukreti
EC3
0
50
100
150
200
250
0 0,02 0,04 0,06 0,08
M (
KN
.m)
Ø (rad )
Essai
Kukreti
EC3

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 89
de diverses méthodes empiriques et analytiques
Fig. 3.33. Spécimen RE1
3.7.3. Comparaison avec les essais d’Augusto [32]
Les figures 3.35, 3.36 et 3.37 comparent entre les courbes moment-rotation obtenues à partir des essais
menés par Simao à celles obtenues par les modèles de Krishnamurti [12], de l’EC3 et de Frye-Morris
[11]. Concernant le modèle de l’EC3, on tire les mêmes conclusions que précédemment. Le modèle de
Krishnamurti [12] fourni des rotations plus élevées que celle obtenues lors des essais, y compris pour
de faibles valeurs du moment fléchissant. Cependant, l’écart n’est pas aussi important que celui des
rotations calculées à l’aide de Frye-Morris [11] et qu’on a choisi de ne pas représenter dans les figures
ci-dessous.
0
50
100
150
200
250
300
350
0 0,02 0,04 0,06 0,08 0,1 0,12
M (
KN
.m)
Ø (rad)
Essai
Frye- morris
Kukreti

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 90
de diverses méthodes empiriques et analytiques
Fig. 3.34. Spécimen J1
Fig. 3.35. Spécimen J3
0
50
100
150
200
250
300
350
400
450
0 0,02 0,04 0,06 0,08
M (
KN
.m)
Ø (rad)
Essai
EC3
Krishnamurti
0
50
100
150
200
250
300
350
400
450
500
0 0,02 0,04 0,06 0,08
M (
KN
.m)
Ø (rad)
Essai
Krishnamurti
EC3

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 91
de diverses méthodes empiriques et analytiques
Fig. 3.36. Spécimen J4
3.7.4. Comparaison avec les essais de Coelho [35]
Les figures 3.38, 3.39 et 3.39 comparent entre les courbes moment-rotation obtenues à partir des essais
menés par Coelho [35] à celles obtenues par les modèles de Krishnamurti [12], de l’EC3 et de Frye-
Morris [11]. Dans le cas des spécimens FS2 et FS3, les résultats obtenus par le modèle de l’EC3 [2]
sont moins précis que précédemment. Les valeurs du moment résistant sont du côté de sécurité. La
méthode de Krishnamurti [11] surestime les rotations, bien que les écarts avec les rotations
enregistrées lors des essais sont moins important que les cas précédents, à l’exception du spécimen
FS3. Le modèle de Frye-Morris [12] fournit des résultats acceptables, dans le cas des spécimens FS1 et
FS3.
0
50
100
150
200
250
300
350
400
450
0 0,02 0,04 0,06 0,08 0,1 0,12
M (
KN
.m)
Ø (rad)
Essai
Krishnamurti
EC3

A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 92
de diverses méthodes empiriques et analytiques
Fig. 3.37. Spécimen FS1
Fig. 3.38. Spécimen FS2
0
20
40
60
80
100
120
140
160
180
0 0,1 0,2 0,3 0,4
M (
KN
.m)
Ø (rad)
Essai
Frye-Morris
Krishnamurti
EC3
0
50
100
150
200
250
0 0,05 0,1 0,15 0,2 0,25
M (
KN
.m)
Ø (rad)
Essai
Krishnamurti
Frye Morris
EC3
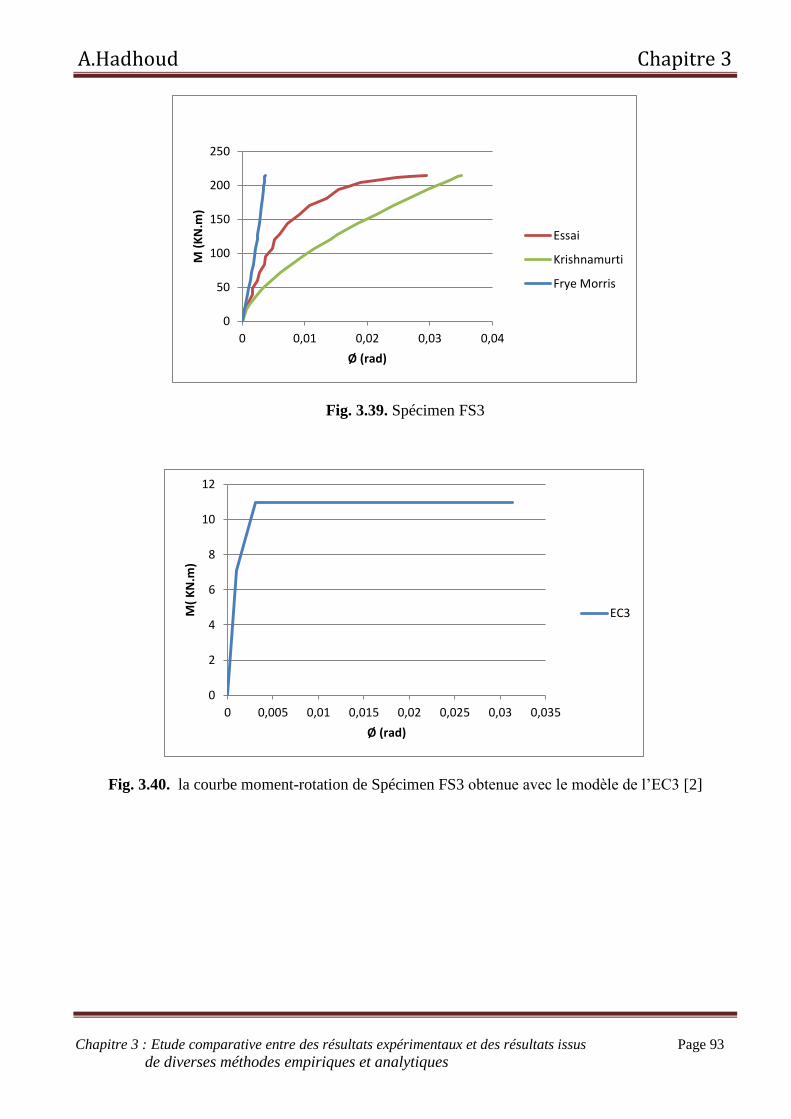
A.Hadhoud Chapitre 3
Chapitre 3 : Etude comparative entre des résultats expérimentaux et des résultats issus Page 93
de diverses méthodes empiriques et analytiques
Fig. 3.39. Spécimen FS3
Fig. 3.40. la courbe moment-rotation de Spécimen FS3 obtenue avec le modèle de l’EC3 [2]
0
50
100
150
200
250
0 0,01 0,02 0,03 0,04
M (
KN
.m)
Ø (rad)
Essai
Krishnamurti
Frye Morris
0
2
4
6
8
10
12
0 0,005 0,01 0,015 0,02 0,025 0,03 0,035
M(
KN
.m)
Ø (rad)
EC3
Conclusion générale

A.Hadhoud
Conclusion générale Page 94
Conclusions
L’objectif de l’étude présentée dans ce mémoire consiste à évaluer trois modèles empiriques et le
modèle analytique de l’EC3 utilisés pour caractériser les assemblages boulonnés poutre-poteau avec
platine d’about débordante ou non. Les méthodes empiriques considérées sont celles de Frye-Morris,
Kukerti et Krishnamurti. La fiabilité et la précision de ces méthodes est déterminée en appliquant ces
méthodes à des assemblages testés en laboratoire déjà publiés. Les résultats sont donnés sous la forme
de courbe moment-rotation. La comparaison entre les courbes moment-rotation expérimentales et
celles issues des formulations empiriques et analytique nous a conduit aux conclusions suivantes pour
les assemblages étudiés :
- les résultats fournis par la formulation de Frye-Morris ne concordent pas avec les résultats
expérimentaux, l’écart, dans la majorité des cas, est très élevé ;
- la formulation de Kukerti fourni des rotations inférieures à celles obtenues aux essais et conduit à
des assemblages plus rigides qui le sont réellement ; cependant l’écart entre les rotations prédits et
celles enregistrées lors des essais n’est pas élevé ; la rigidité initiale obtenue avec cette méthode peut
être considérée comme suffisamment précise ;
- à l’opposé, la méthode de Krishnamurti surestime les rotations par rapport à celle obtenues lors des
essais ; l’écart avec les résultats expérimentaux est plus élevé que ceux obtenues avec la méthode de
Kukerti et conduit à des assemblages ayant un comportement moins rigide ;
- la méthode des composantes de l’EC3, fournit en général des rigidités initiales acceptables, par
contre les moments résistants des assemblages sont nettement inférieurs à ceux des essais ; cependant,
les valeurs obtenues sont du côté de sécurité.
Notons cependant que nous avons rencontré des difficultés concernant l’application de la méthode de
Frye-Morris, malgré sa simplicité, dues à un problème d’unités qui différent d’une publication à une
autre. Dans certains articles, les unités des paramètres de la formule ne sont pas définies ou ne sont
qu’en partie définies. Tous ces facteurs peuvent avoir une influence sur les résultats et peut expliquer
l’écart important entre les résultats obtenus à partir de cette formulation et les résultats expérimentaux.
A la lumière des résultats obtenus au cours de cette étude, qui est tout de même limitée à un nombre
limité de méthodes et d’essais, il en existe d’autres, nous pouvons recommander d’utiliser la
formulation de Kukerti ou de l’EC3 pour les assemblages avec platine d’about non débordante et la
formulation de l’EC3 pour les assemblages avec platine débordante.
Cette étude peut s’étendre à d’autres méthodes et à d’autres types d’assemblages afin de pouvoir
évaluer avec une précision suffisante leurs caractéristiques mécaniques.

Bibliographie

Bibliographie
[1] HIRT M. et BEZ R. – Construction métallique. Notions fondamentales et méthodes de
dimensionnement. Traité de Génie Civil de l'École Polytechnique Fédérale de Lausanne.
Volume 10. 498 p. Presses Polytechniques et Universitaires Romandes. Lausanne 1994.
[2] EN 1993-1-8 – Eurocode 3 : Calcul des structures en acies Partie 1-8 : Calcul des
assemblages
[3] JASPART J.P. –Elément de stabilité des structures de batiments métalliques. notes
destinées aux étudiants de CUST de Clermont-Ferrand. 1998
[4] CIUTINA L. A. – Assemblage et comportement sismique de portiques en acier et
mixtes acier-béton : Expérimentation et simulation numérique. Thèse de doctorat :
Institut National des Sciences Appliquées de Rennes. 2003
[5] MUZEAU J.P. – Constructions métalliques-Moyens d’assemblages. Université Blaise
Pascal Clermont-Ferrand II. Novembre 2010
[6] Mimoune M. et Mimoune F.Z. – Analyse du comportement des assemblages boulonnés
par platine d’about sollicités en traction. Revue Canadienne de Génie Civil, 30 (4), pp.
615-624. 2003
[7] MOREL J. – Calcul des Structures métalliques selon l'Eurocode3. Editions
Eyrolles.1994.
[8] Aribert J. M. Lachal A. et Dinga O. N. – Modélisation du comportement d'assemblages
métalliques semi rigides de types poutre poteau boulonnés par platine d’extrémité.
Construction Métallique, N° 1, 22 pages. 1999
[9] LABED. A. – Cours de constructions métalliques pour Master. Université de Tébessa.
2014
[10] EN 1993-1-1 – Eurocode 3 : Calcul des structures en acier Partie 1-1: Règles générales et
règles pour les bâtiments.
[11] Frye M.J., Morris G.A. (1975), Analysis of flexibly connected steel frames. Canadian
Journal of Civil Engineering;2(3):280–91.
[12] Krishnamurthy N. (1978), Fresh look at bolted end-plate behaviour and design,
Engineering Journal;15(2):39–49.
[13] Bahaari M. R., Sherbourne A. N., (1994), Computer Modeling of an extended end-plate
bolted connection, Computers and Structures, Vol. 52, N° 5, pp. 879-893.
[14] Krishnamurthy N., Graddy D.E. (1976) , Correlation between 2- and 3-dimensional
finite element analysis of steel bolted end-plate connections. Computers &
Structures;6(4–):381–9.
[15] Kukreti A.R., Murray T.M, Abolmaali A. (1987), End-plate connection moment–rotation
relationship, Journal of Constructional Steel Research;8:137–57.
[16] Kukreti AR, Murray TM, Ghassemieh M. Finite element modeling of large
capacity stiffened steel tee-hanger connections. Computers & Structures
1989;32(2):409–22.

[17] Abolmaali A., Matthys J.H., Farooqi M., Choi Y. (2005), Development of moment–
rotation model equations for flush end-plate connections. Journal of Constructional Steel
Research 2005;61:1595–612.
[18] Sherbourne AN, Bahaari MR. 3D simulation of end-plate bolted connections.
Journal of Structural Engineering 1996;120(11):3122–36.
[19] Faella C., Martinelli E., Nigro E. (2008), Analysis of steel-concrete composite PRframes
in partial shear interaction: a numerical model and some applications, Engineering
Structures;30(4):1178–86.
[20] Swanson J.A., Kokan D.S., Leon R.T (2002), Advanced finite element modeling of
bolted T-stub connection components. Journal of Constructional Steel Research;58(5–
8):1015–31.
[21] Maggi Y.I., Gonçalves R.M., Leon R.T., Ribeiro L.F.L. (2005), Parametric analysis of
steel bolted end plate connections using finite element modelling. Journal of
Constructional Steel Research;61:689–708.
[22] Tagawa H., Gurel S. (2005), Application of steel channels as stiffeners in bolted moment
connections. Journal of Constructional Steel Research;61(12): 1650–71.
[23] Mohamadi-shooreh M.R., Mofid M. (2008), Parametric analyses on the initial stiffness
of flush end-plate splice connections using FEM. Journal of Constructional Steel
Research 2008;65(3):749.
[24] Faella C., Piluso V., Rizzano G. (2000), Structural steel semirigid connections: theory,
design and software, In: New directions in civil engineering. Boca Raton (FL (EEUU)):
CRC Publishers.
[25] Díaz C., Martí P., Victoria M. and Querin O. (2011), Review on the modelling of joint
behaviour in steel frames, Journal of Constructional Steel Research 67 741–758.
[26] Kishi N, Chen WF. Moment–rotation semi-rigid connections. Structural Engineering
Report No. CE-STR-
87-29, West Lafayette (IN): School of Civil Engineering, Purdue University; 1987.
[27] Richard RM, Abbott BJ. Versatile elastic–plastic stress–strain formula. Journal of the
Engineering
Mechanics Division, ASCE 1975;101(EM4):511–5.
[28] Chen WF, Kishi N. Moment–rotation relation of top and seat angle connections, CE-
STR-87-4.
In: Proceedings of the international colloquium on bolted and special connections. 1989.
[29] Jenkins W. L., Tong C. S. and Prescott A.T. (1996), Moment transmitting endplate
connections in steel construction and a proposed basis for flush endplate design the
structural engineerin, Vol. 64 A, N° 5, pp. 121-132.
[30] Benterkia Z. (1991), End-plate connections and analysis of semi-rigid steel frames, PhD
thesis, University of Warwick.
[31] ABIDELAH. A. – Analyse numérique du comportement d’assemblages métalliques-
Approche numérique et validation expérimentale. Thèse de doctorat : Génie Civil
[32] Hugo Augusto, Institute for Sustainability and Innovation in Structural Engineering
(ISISE), Department of Civil Engineering, University of Coimbra, Polo II, Rua Luís Reis
Santos, 3030-788 Coimbra, Portugal
[33] H. Gervásio, L. Simões da Silva, L. Borges, Reliability assessment of the postlimit
stiffness and ductility of steel joints, J. Constr. Steel Res. 60 (4) (2004)
635–648.
[34] P. Nogueiro, Cyclic Behaviour of Steel Connections(PhD Thesis) Civil Engineering
Department, University of Coimbra, Portugal, 2009 (in Portuguese).

[35] Gira˜o Coelho AM, Bijlaard F, Simo˜es da Silva L. On the behaviour ofbolted end plate
connections modelled by welded T-stubs. In: Lamas A, Simo˜es da Silva L, editors. Steel
[36] Sherbourne AN, Bahaari MR. 3D simulation of end-plate bolted connections.
J Struct Eng 1996;120(11):3122–36.
[37] Bouatrous O. (2015), Elaboration d’un programme de calcul des assemblages
métalliques boulonnés, Mémoire de Master : Génie Civil. Université Cheikh Larbi
Tebessi Tébessa
[38] Braham M., Cerfontaine F. et Jaspart J.P. (1999), Calcul et conception économique des
assemblages des profilés reconstituées soudés, Construction métallique n°1.
[39] Mahmoud H.N. (2011), Seismic behavior of semi-rigid steel frames, PhD Thesis,
University of Illinois.
[40] Green P., Sputo T. and Higgins A. (2005), Design of all-bolted extended double angle,
single angle, and Tee shear connections, Department of civil & coastal engineering
University of Florida.
[41] Saranik, M. (2012), Conception parasismique robuste de bâtiments à base d'assemblages
boulonnés, Thèse de doctorat, Ecole centrale de Lyon.
[42] Radziminski JB, Azizinamini A. Prediction of moment–rotation behaviour of
semi-rigid beam-to-column connections. In: Connections in steel structures:
behaviour. Strength and design. London: Elsevier Applied Science Publishers;1988
[43] TAKOUACHET M. (2008), Caractérisation des assemblages structuraux en construction
métallique selon L’EC3, Mémoire de Magister : Génie Civil. Université Mentouri
Constantine. 2008.
[44] MAROUF S. (2014) Modélisation des assemblages poteaux-poutres dans les structures
métalliques, Mémoire de Master : Génie Civil. Université Aboubekr Belkaid Tlemcen.
[45] Saadi M. (2014) Comportement des structures métalliques avec assemblage semi-rigide
en zone sismique Mémoire de Magister : Génie Civil. Université Hadj Lakhdar Batna







