
Box2D
1
What is the Box2D? Open-Source 2D Physics Engine
C++ by Erin Catto for the Game Developer’s Conference in 2006. Box2D site (http://www.box2d.org/) for reference Crayon Physics Angry Birds
JBox2D : Java Wrapper Box2D site (http://www.jbox2d.org//) for reference. Can be directly used in Processing
PBox2D : Processing Wrapper Make it easy to use JBox2D A layer library between JBox2D and Processing a Processing Box2D “helper” library ( a set of functions that help
you get your Box2D) PBox2D is not a Processing wrapper for all of Box2D https://github.com/shiffman/PBox2D
2

Box2D Basics In old physical simulation
SETUP:1. Create all the objects in our world.
DRAW:1. Calculate all the forces in our world.2. Apply all the forces to our objects (F = M * A).3. Update the locations of all the objects based on their
acceleration.4. Draw all of our objects.
In Box2D SETUP:
1. Create all the objects in our world.
DRAW:1. Draw all of our objects.
3
Five core parts for using Box2D1. World: Manages the physics simulation. It knows
everything about the overall coordinate space and also stores lists of every element in the world
2. Body: Serves as the primary element in the Box2D world. It has a location. It has a velocity. Sound familiar? The Body is essentially the class we’ve been writing on our own in our vectors and forces examples.
3. Shape: Keeps track of all the necessary collision geometry attached to a body.
4. Fixture: Attaches a shape to a body and sets properties such as density, friction, and restitution.
5. Joint: Acts as a connection between two bodies (or between one body and the world itself).
4

A new Vector Class : Vec2
5
PVector Vec2PVector a = new PVector(1,-1);PVector b = new PVector(3,4);a.add(b);
Vec2 a = new Vec2(1,-1);Vec2 b = new Vec2(3,4);a.addLocal(b);
PVector a = new PVector(1,-1);PVector b = new PVector(3,4);PVector c = PVector.add(a,b);
Vec2 a = new Vec2(1,-1);Vec2 b = new Vec2(3,4);Vec2 c = a.add(b);
PVector a = new PVector(1,-1);float n = 5;a.mult(n);
Vec2 a = new Vec2(1,-1);float n = 5;a.mulLocal(n);
PVector a = new PVector(1,-1);float n = 5;PVector c = PVector.mult(a,n);
Vec2 a = new Vec2(1,-1);float n = 5;Vec2 c = a.mul(n);
PVector a = new PVector(1,-1);float m = a.mag();a.normalize();
Vec2 a = new Vec2(1,-1);float m = a.length();a.normalize();
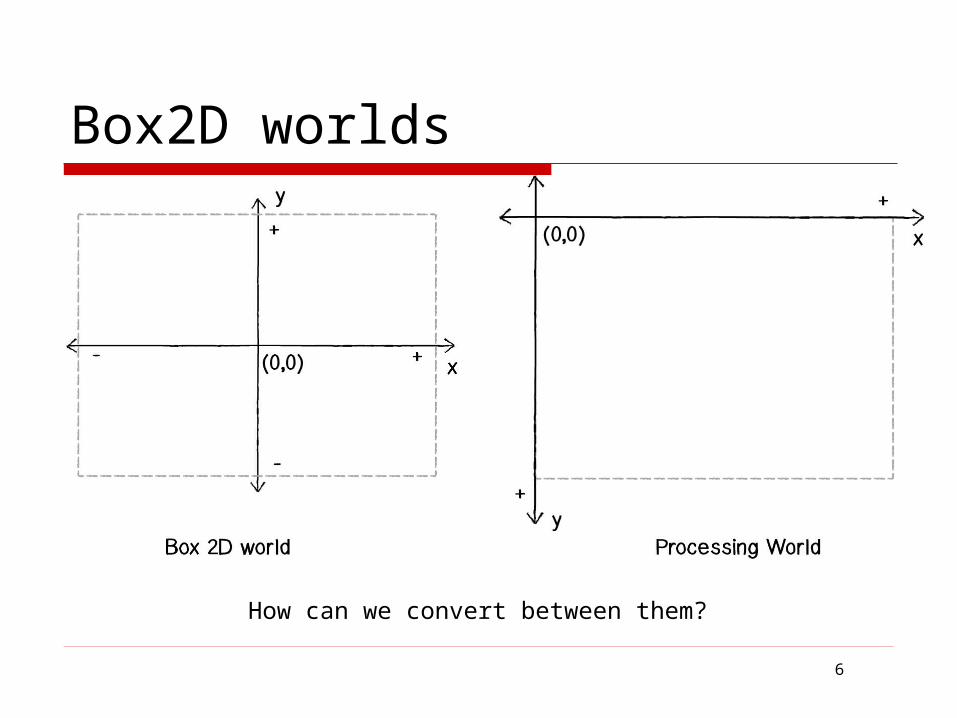
Box2D worlds
6
How can we convert between them?
Helper functions
7
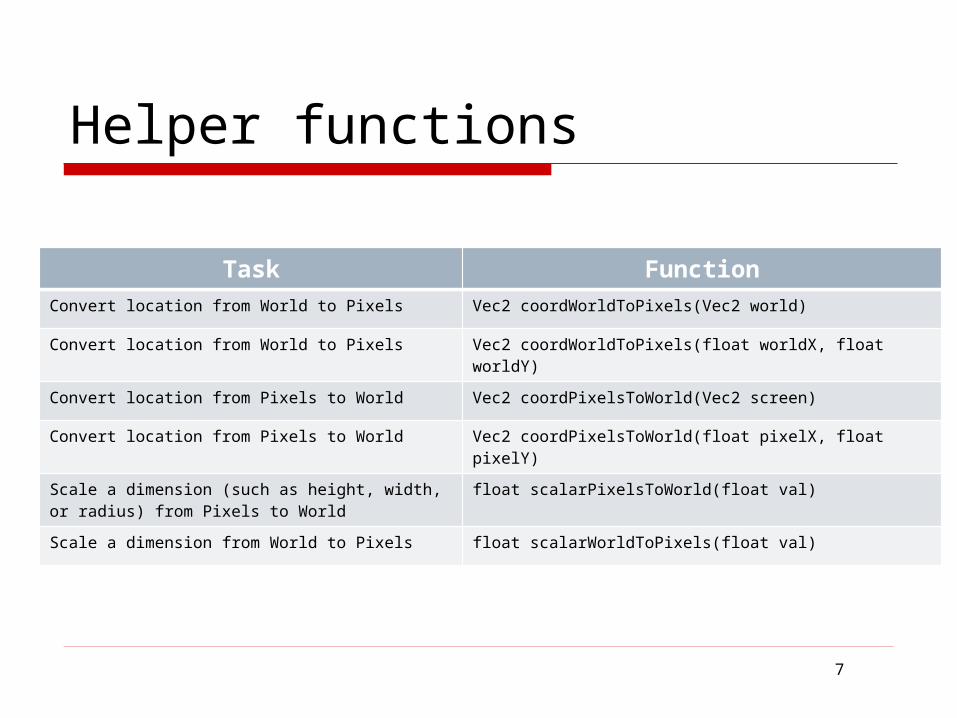
Task FunctionConvert location from World to Pixels Vec2 coordWorldToPixels(Vec2 world)
Convert location from World to Pixels Vec2 coordWorldToPixels(float worldX, float worldY)
Convert location from Pixels to World Vec2 coordPixelsToWorld(Vec2 screen)
Convert location from Pixels to World Vec2 coordPixelsToWorld(float pixelX, float pixelY)
Scale a dimension (such as height, width, or ra-dius) from Pixels to World
float scalarPixelsToWorld(float val)
Scale a dimension from World to Pixels float scalarWorldToPixels(float val)
Set up the world
8
PBox2D box2d;
void setup() { box2d = new PBox2D(this); //Initializes a Box2D world with default settings box2d.createWorld();}

Set up the Body
Step 1: Define a body.
9
//define the properties of the body we intend to makeBodyDef bd = new BodyDef();
Vec2 center = box2d.coordPixelsToWorld(width/2,height/2));bd.position.set(center);
bd.fixedRotation = true; //Fixed, never rotating objects
bd.linearDamping = 0.8; //Frictionbd.angularDamping = 0.9;
bd.bullet = true; //if it is FAST moving objectsbd.type = BodyType.DYNAMIC; // body type
Step 2: Configure the body definition.

Body types Dynamic (BodyType.DYNAMIC)
a “fully simulated” body. A dynamic body moves around the world, collides with other bodies, and responds to the forces in its environment.
Static (BodyType.STATIC) cannot move (as if it had an infinite mass). We’ll use
static bodies for fixed platforms and boundaries. Kinematic(BodyType.KINEMATIC)
can be moved manually by setting its velocity directly. If you have a user-controlled object in your world, you can use a kinematic body. Note that kinematic bodies collide only with dynamic bodies and not with other static or kinematic ones.
10

11
Body body = box2d.createBody(bd);
Step 3: Create the body.
Set up the Body
Step 4: Set any other conditions for the body’s starting state.body.setLinearVelocity(new Vec2(0,3));body.setAngularVelocity(1.2);

Linking Shape with Body Body does not have geometry We have to attach geometry shape to
body with a Fixture We can attach multiple shapes to a
single body in order to create more complex forms.
12
Step 1: Define a shapePolygonShape ps = new PolygonShape();float box2Dw = box2d.scalarPixelsToWorld(150);float box2Dh = box2d.scalarPixelsToWorld(100);ps.setAsBox(box2Dw, box2Dh);
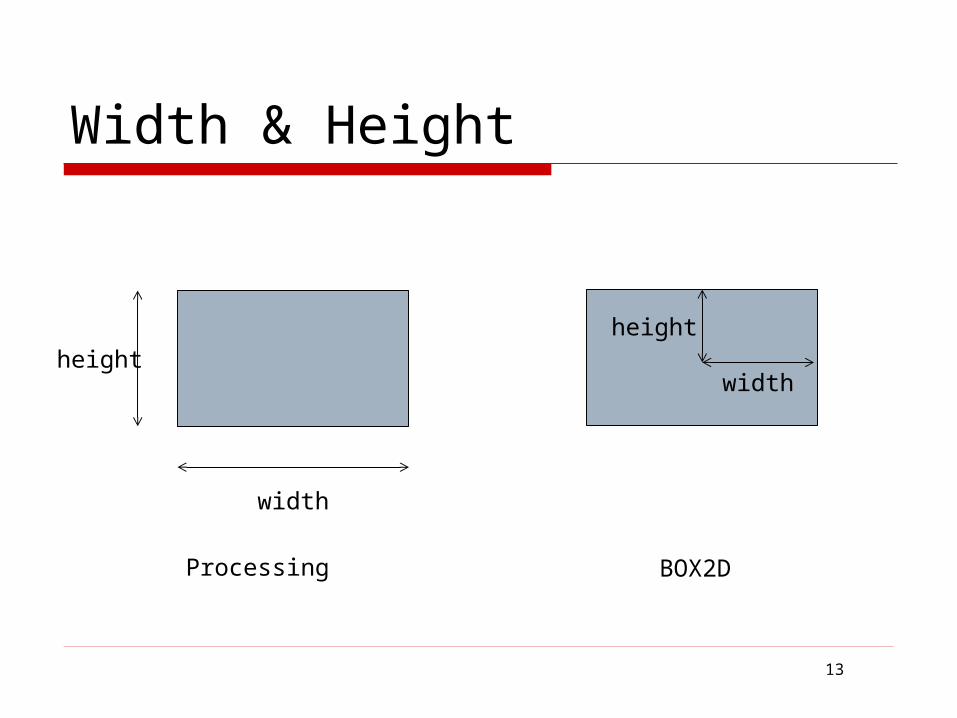
Width & Height
13
width
heightheight
width
Processing BOX2D
14
Step 2: Create a fixture.FixtureDef fd = new FixtureDef();//The fixture is assigned the PolygonShape we just made.
fd.shape = ps;fd.friction = 0.3; //The coefficient of friction for the shape, typically between 0 and 1
fd.restitution = 0.5; //The Shape’s restitution (i.e. elasticity), typically between 0 and 1
fd.density = 1.0; //The Shape’s density, measured in kilograms per meter squared
Step 3: Attach the shape to the body with the fixture.body.createFixture(fd); Or you can use the default fixturebody.createFixture(ps,1); // Creates the Fixture and attaches the Shape with a density of 1
In summary1. Define a body using a BodyDef object (set any
properties, such as location).2. Create the Body object from the body definition.3. Define a Shape object using PolygonShape,
CircleShape, or any other shape class.4. Define a fixture using FixtureDef and assign the
fixture a shape (set any properties, such as friction, density, and restitution).
5. Attach the shape to the body.
15

In processing term.
16
//Step 1. Define the body. BodyDef bd = new BodyDef(); bd.position.set(box2d.coordPixelsToWorld(width/2,height/2));
//Step 2. Create the body. Body body = box2d.createBody(bd);
//Step 3. Define the shape. PolygonShape ps = new PolygonShape(); float w = box2d.scalarPixelsToWorld(150); float h = box2d.scalarPixelsToWorld(100); ps.setAsBox(w, h)
//Step 4. Define the fixture. FixtureDef fd = new FixtureDef(); fd.shape = ps; fd.density = 1; fd.friction = 0.3; fd.restitution = 0.5;
//Step 5. Attach the shape to the body with the Fixture. body.createFixture(fd);
How can we keep tracking objects?
Use the arrayList (Dynamic array) Exercise
Making boxes on the fly whenever we move the box and put it on an arrayList.
17

18
// A list for all of our rectanglesArrayList<Box> boxes;
void setup() { size(800,200); smooth(); // Create ArrayLists boxes = new ArrayList<Box>();}
void draw() { background(255);
// When the mouse is clicked, add a new Box object if (mousePressed) { Box p = new Box(mouseX,mouseY); boxes.add(p); }
// Display all the boxes for (Box b: boxes) { b.display(); }}
// A rectangular boxclass Box {
float x,y; float w,h;
// Constructor Box(float x_, float y_) { x = x_; y = y_; w = 16; h = 16; }
// Drawing the box void display() { fill(127); stroke(0); strokeWeight(2); rectMode(CENTER); rect(x,y,w,h); }}
Class Design
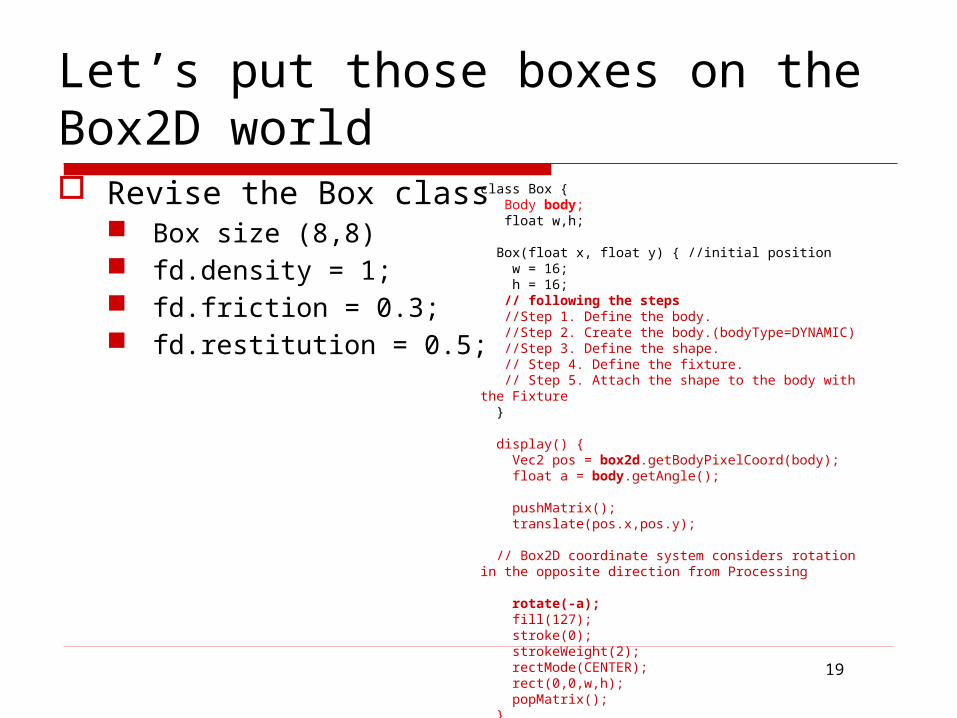
Let’s put those boxes on the Box2D world Revise the Box class
Box size (8,8) fd.density = 1; fd.friction = 0.3; fd.restitution = 0.5;
19
class Box { Body body; float w,h;
Box(float x, float y) { //initial position w = 16; h = 16; // following the steps //Step 1. Define the body. //Step 2. Create the body.(bodyType=DYNAMIC) //Step 3. Define the shape. // Step 4. Define the fixture. // Step 5. Attach the shape to the body with the Fixture }
display() { Vec2 pos = box2d.getBodyPixelCoord(body); float a = body.getAngle();
pushMatrix(); translate(pos.x,pos.y);
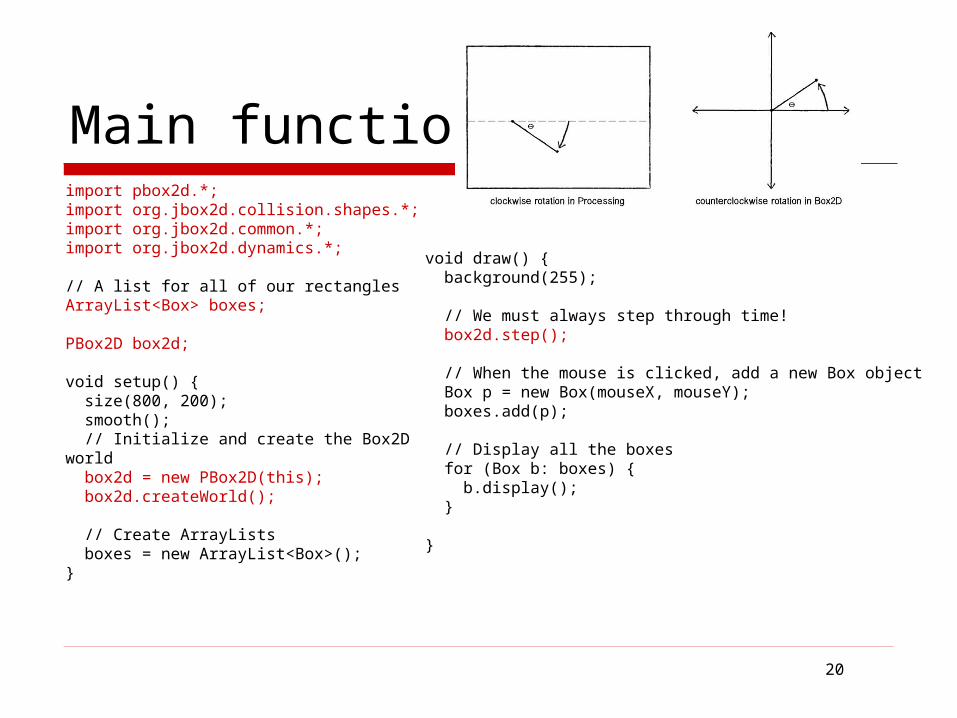
// Box2D coordinate system considers rotation in the opposite direction from Processing
rotate(-a); fill(127); stroke(0); strokeWeight(2); rectMode(CENTER); rect(0,0,w,h); popMatrix(); }}
Main function
20
import pbox2d.*;import org.jbox2d.collision.shapes.*;import org.jbox2d.common.*;import org.jbox2d.dynamics.*;
// A list for all of our rectanglesArrayList<Box> boxes;
PBox2D box2d;
void setup() { size(800, 200); smooth(); // Initialize and create the Box2D world box2d = new PBox2D(this); box2d.createWorld();
// Create ArrayLists boxes = new ArrayList<Box>();}
void draw() { background(255);
// We must always step through time! box2d.step();
// When the mouse is clicked, add a new Box object Box p = new Box(mouseX, mouseY); boxes.add(p);
// Display all the boxes for (Box b: boxes) { b.display(); }
}

Let’s put some boundaries.
To create boundaries, we need to set BodyDef object’s type to STATIC.
21
22
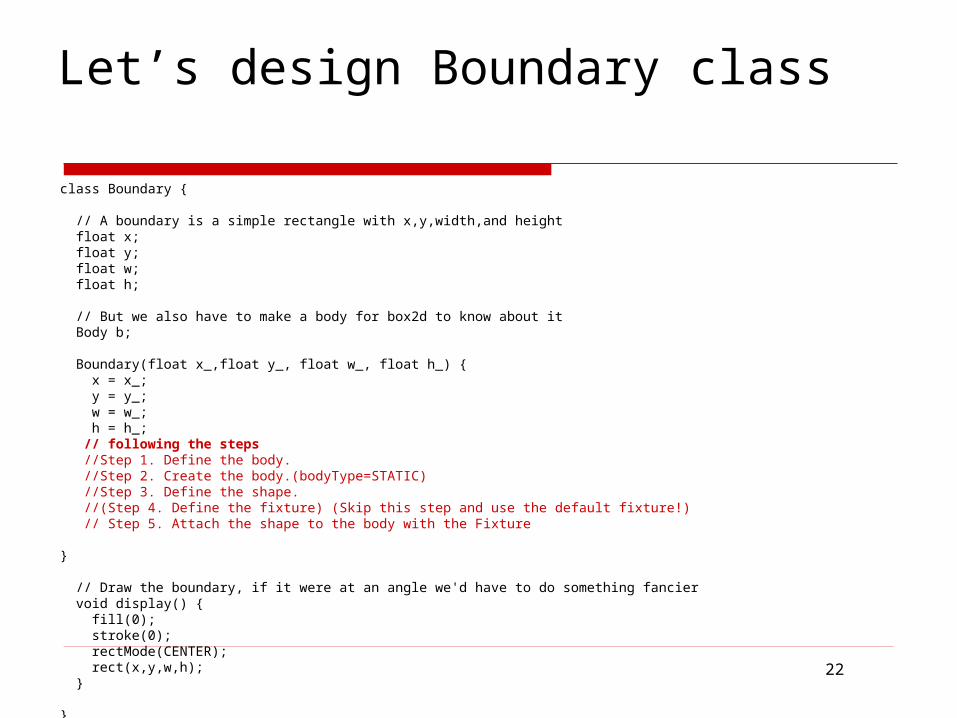
class Boundary {
// A boundary is a simple rectangle with x,y,width,and height float x; float y; float w; float h; // But we also have to make a body for box2d to know about it Body b;
Boundary(float x_,float y_, float w_, float h_) { x = x_; y = y_; w = w_; h = h_; // following the steps //Step 1. Define the body. //Step 2. Create the body.(bodyType=STATIC) //Step 3. Define the shape. //(Step 4. Define the fixture) (Skip this step and use the default fixture!) // Step 5. Attach the shape to the body with the Fixture
}
// Draw the boundary, if it were at an angle we'd have to do something fancier void display() { fill(0); stroke(0); rectMode(CENTER); rect(x,y,w,h); }
}
Let’s design Boundary class
23
// A reference to our box2d worldPBox2D box2d;
// A list we'll use to track fixed objectsArrayList<Boundary> boundaries;// A list for all of our rectanglesArrayList<Box> boxes;
void setup() { size(800, 200); smooth(); // Initialize and create the Box2D world box2d = new PBox2D(this); box2d.createWorld();
// Create ArrayLists boxes = new ArrayList<Box>(); boundaries = new ArrayList<Boundary>(); // Add a bunch of fixed boundaries boundaries.add(new Boundary(width/4,height-5,width/2-50,10)); boundaries.add(new Boundary(3*width/4,height-50,width/2-50,10));}
Let’s design main function
One problem of this example
Computationally expensive as we increase the number of boxes
It is getting slow as it goes. How can we fix it?
If the box is out of screen, remove it!!
24

25
void killBody() { box2d.destroyBody(body); //ask box2d to destroy the body }
// Is the particle ready for deletion? boolean done() { // Let's find the screen position of the particle Vec2 pos = box2d.getBodyPixelCoord(body); // Is it off the bottom of the screen? if (pos.y > height+h) { killBody(); return true; } return false; }
Let’s modify Box class and main function
for (int i = boxes.size()-1; i >= 0; i--) { Box b = boxes.get(i); if (b.done()) { boxes.remove(i); //remove from the array } }
BOX classDraw() in main function
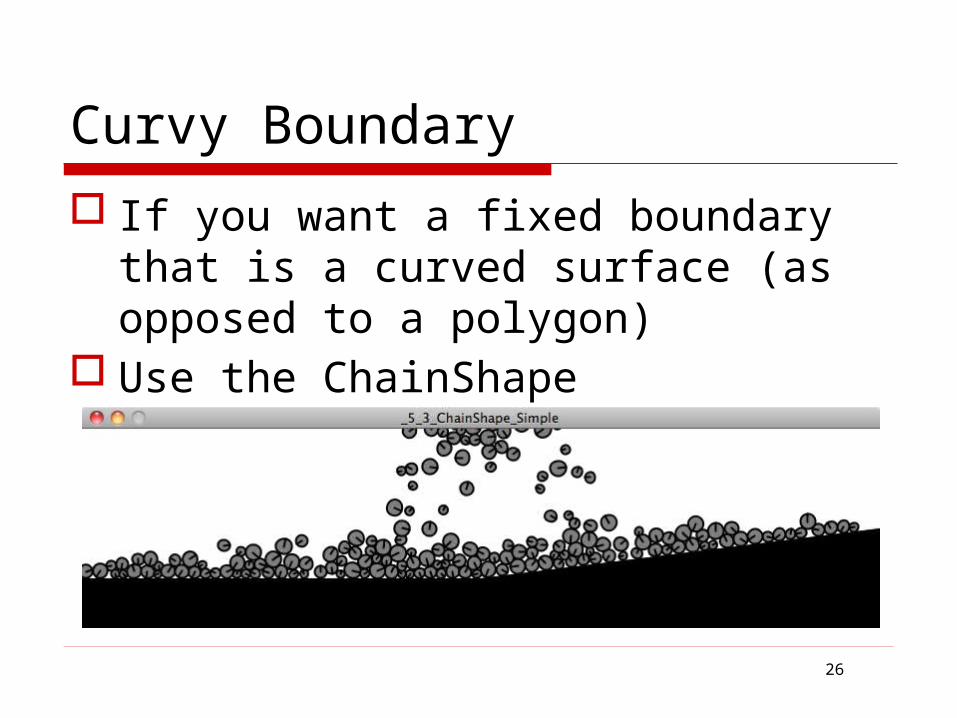
Curvy Boundary
If you want a fixed boundary that is a curved surface (as opposed to a polygon)
Use the ChainShape
26
27
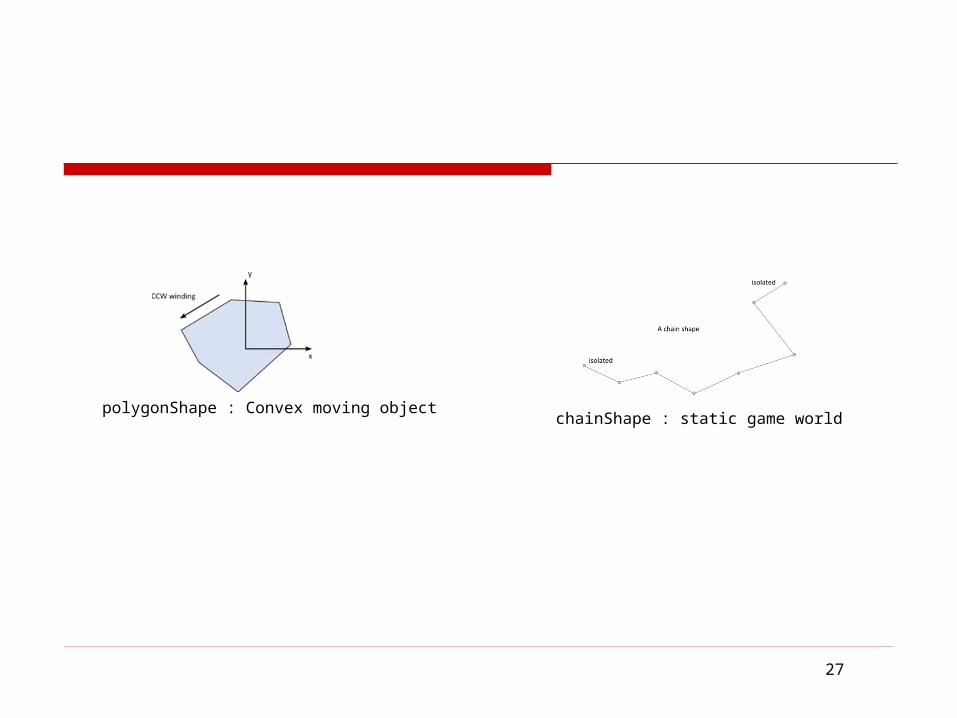
polygonShape : Convex moving objectchainShape : static game world

Steps Step 1: Define a body.
28
BodyDef bd = new BodyDef();Body body = box2d.world.createBody(bd);
Step 2: Define the Shape.
ChainShape chain = new ChainShape();
Step 3: Configure the Shape.
Vec2[] vertices = new Vec2[2];vertices[0] = box2d.coordPixelsToWorld(0,150);vertices[1] = box2d.coordPixelsToWorld(width,150);chain.createChain(vertices, vertices.length);
Steps Step 4: Attach the Shape to the body with a
Fixture.
29
FixtureDef fd = new FixtureDef();fd.shape = chain;fd.density = 1;fd.friction = 0.3;fd.restitution = 0.5;body.createFixture(fd);
Define a Surface
30
class Surface { // We'll keep track of all of the surface points ArrayList<Vec2> surface;
Surface() { surface = new ArrayList<Vec2>(); // Here we keep track of the screen coordinates of the chain surface.add(new Vec2(0, height/2)); //surface.add(new Vec2(width/2, height/2+50)); surface.add(new Vec2(width, height/2));
// This is what box2d uses to put the surface in its world ChainShape chain = new ChainShape();
// We can add 3 vertices by making an array of 3 Vec2 objects Vec2[] vertices = new Vec2[surface.size()]; for (int i = 0; i < vertices.length; i++) { vertices[i] = box2d.coordPixelsToWorld(surface.get(i)); }
chain.createChain(vertices, vertices.length);
// The edge chain is now a body! BodyDef bd = new BodyDef(); Body body = box2d.world.createBody(bd); // Shortcut, we could define a fixture if we // want to specify frictions, restitution, etc. body.createFixture(chain, 1); }

How to draw it?
31
void display() { strokeWeight(1); stroke(0); fill(0); beginShape(); for (int i=0; i<surface.size(); i++) { Vec2 v = surface.get(i); vertex(v.x,v.y); } vertex(width, height); vertex(0, height); endShape(CLOSE); }
(0,height) (width,height)
vertex(v.x,v.y); vertex(v.x,v.y);
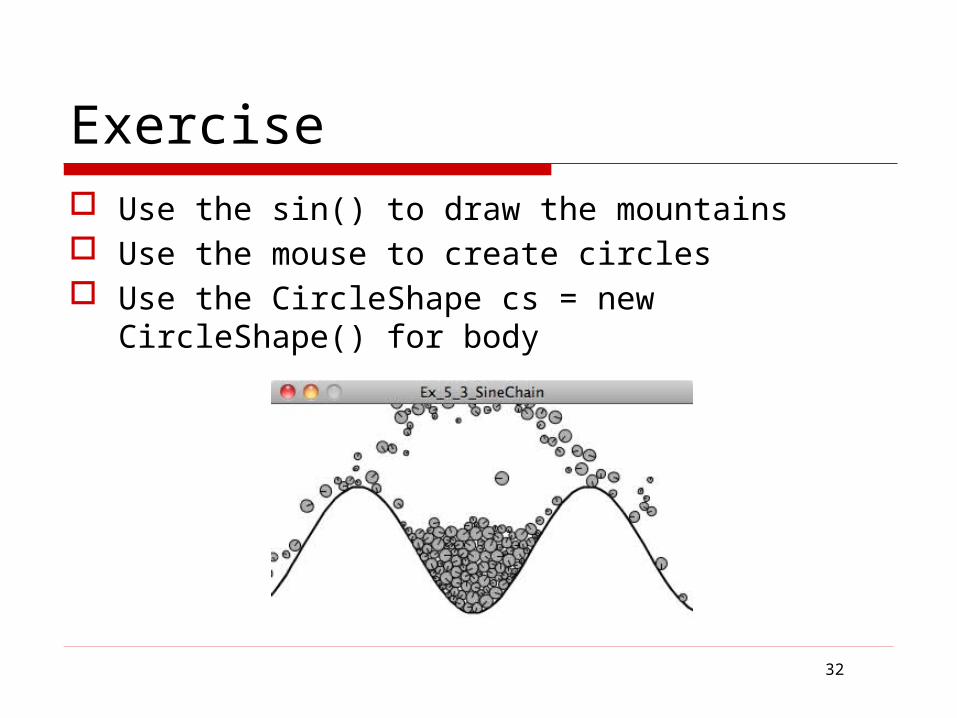
Exercise Use the sin() to draw the mountains Use the mouse to create circles Use the CircleShape cs = new CircleShape() for
body
32
Body type and parameters
33
float r = random(4,8); CircleShape cs = new CircleShape(); cs.m_radius = box2d.scalarPixelsToWorld(r); FixtureDef fd = new FixtureDef(); fd.shape = cs; fd.density = 1; fd.friction = 0.01; fd.restitution = 0.3; . . . body.setLinearVelocity(new Vec2(random(-10f,10f),random(5f,10f)));
34
Building Mountain : use the sin function
float angle = 0;float angleVel = 0.2;float amplitude = 100;size(400,200);background(255);smooth();stroke(0);strokeWeight(2);noFill();
beginShape();for (int x = 0; x <= width; x += 5) {
//map one value from the current range to another range float y = map(sin(angle),-1,1,0,height); vertex(x,y); angle +=angleVel;}endShape();
Complex Shapes
How to create more complex shapes?
35
build a completely custom shape as a series of connected vertices
36
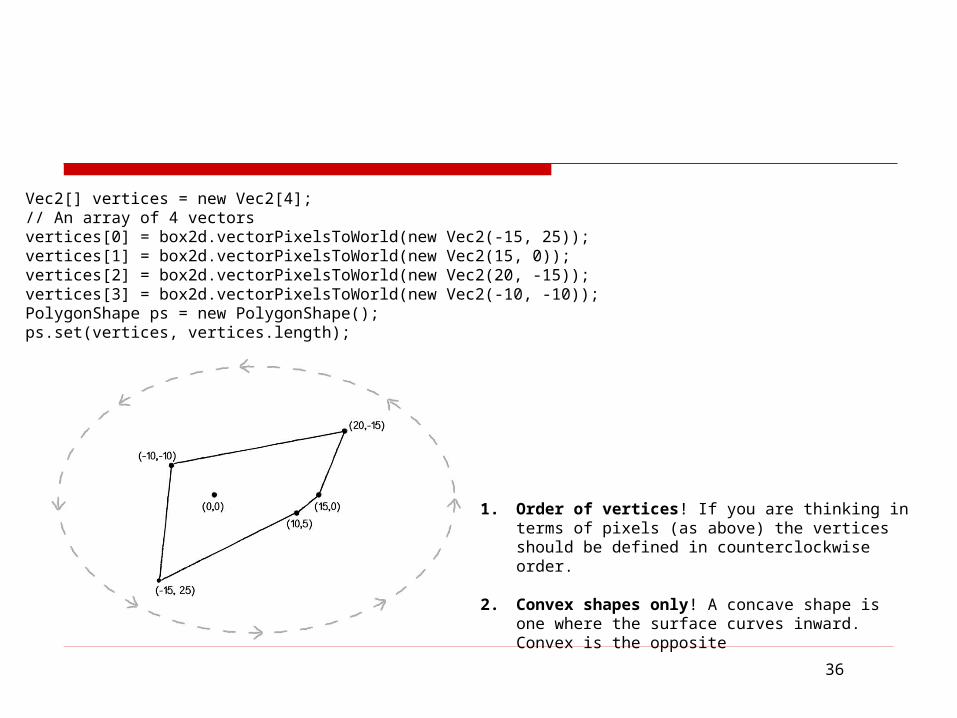
Vec2[] vertices = new Vec2[4];// An array of 4 vectorsvertices[0] = box2d.vectorPixelsToWorld(new Vec2(-15, 25));vertices[1] = box2d.vectorPixelsToWorld(new Vec2(15, 0));vertices[2] = box2d.vectorPixelsToWorld(new Vec2(20, -15));vertices[3] = box2d.vectorPixelsToWorld(new Vec2(-10, -10));PolygonShape ps = new PolygonShape();ps.set(vertices, vertices.length);
1. Order of vertices! If you are thinking in terms of pixels (as above) the vertices should be defined in counterclockwise order.
2. Convex shapes only! A concave shape is one where the surface curves inward. Convex is the opposite
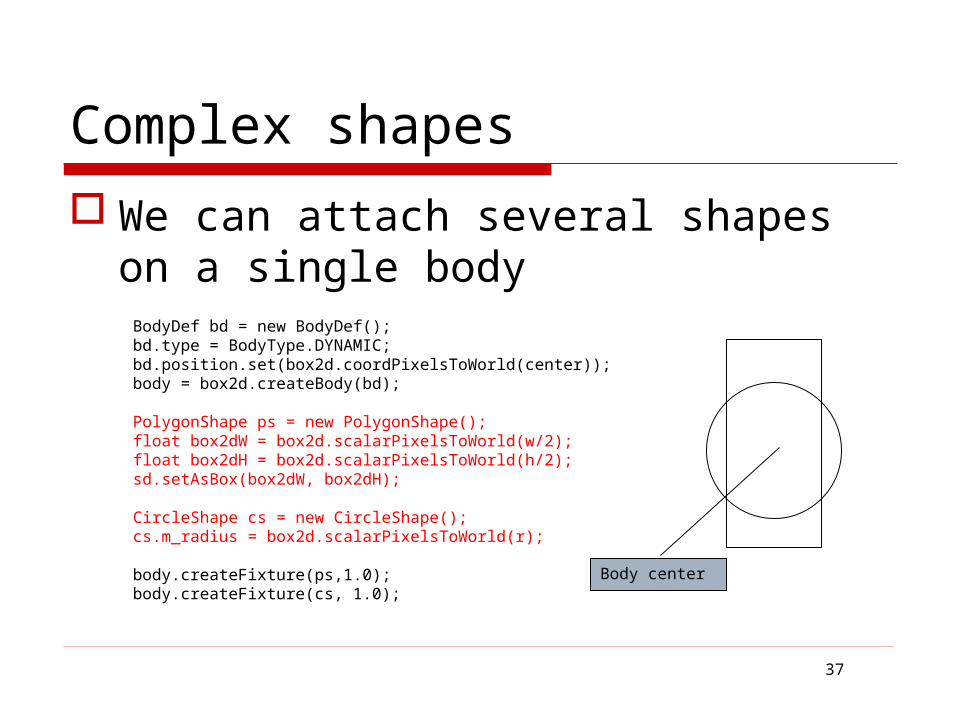
Complex shapes
We can attach several shapes on a single body
37
BodyDef bd = new BodyDef();bd.type = BodyType.DYNAMIC;bd.position.set(box2d.coordPixelsToWorld(center));body = box2d.createBody(bd);
PolygonShape ps = new PolygonShape();float box2dW = box2d.scalarPixelsToWorld(w/2);float box2dH = box2d.scalarPixelsToWorld(h/2);sd.setAsBox(box2dW, box2dH);
CircleShape cs = new CircleShape();cs.m_radius = box2d.scalarPixelsToWorld(r);
body.createFixture(ps,1.0);body.createFixture(cs, 1.0);
Body center

Moving
38
Vec2 offset = new Vec2(0,-h/2);//Converting the vector to Box2D worldoffset = box2d.vectorPixelsToWorld(offset);//Setting the local position of the circlecircle.m_p.set(offset.x,offset.y);
m_p : local center of shape

Setting shapes on body Setting proper shapes on the body is
really important for correct simulation. If not, the collision detection does not
work and simulation has errors.
39
Overlapping each other !!
Exercise : Revise the old example
40
41
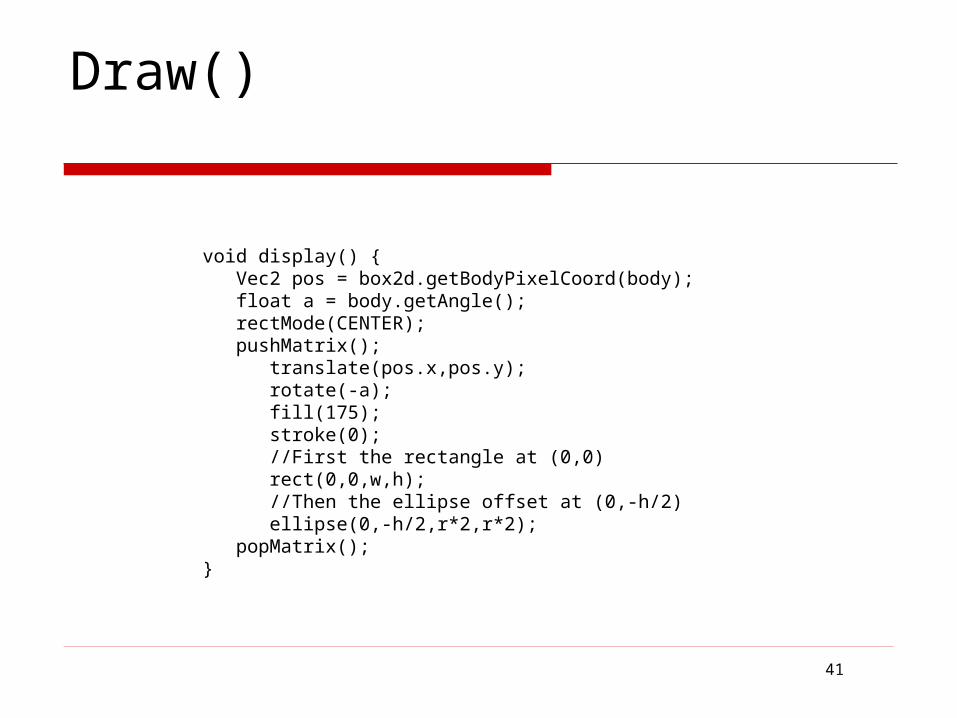
void display() { Vec2 pos = box2d.getBodyPixelCoord(body); float a = body.getAngle(); rectMode(CENTER); pushMatrix(); translate(pos.x,pos.y); rotate(-a); fill(175); stroke(0); //First the rectangle at (0,0) rect(0,0,w,h); //Then the ellipse offset at (0,-h/2) ellipse(0,-h/2,r*2,r*2); popMatrix();}
Draw()
Box2D Joints Connecting one body to another
42
Three different joints distance joints revolute joints “mouse” joints
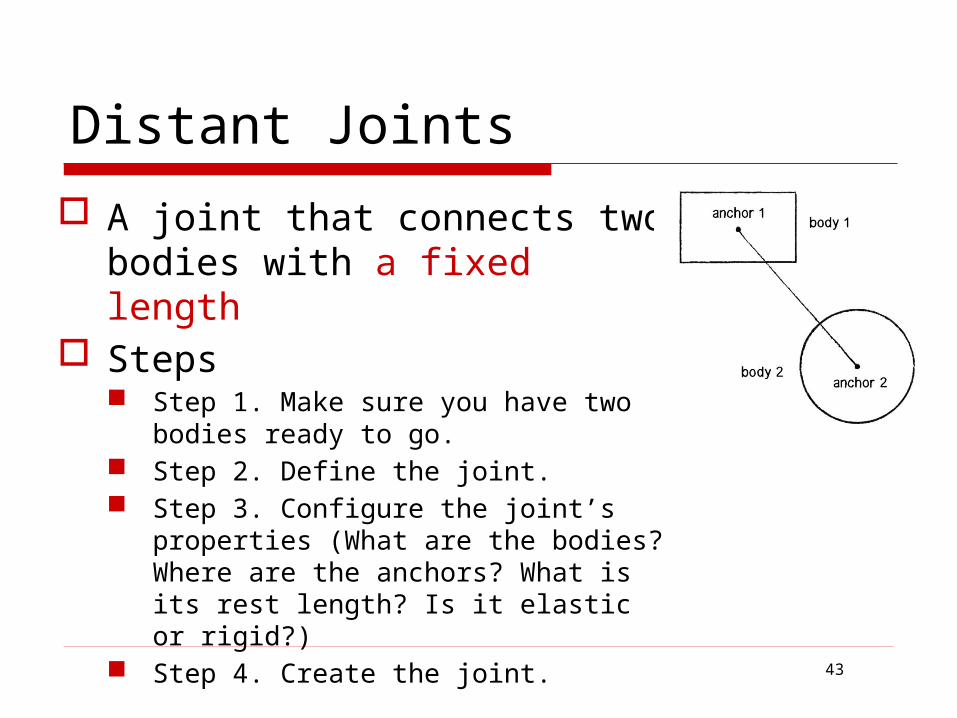
Distant Joints
A joint that connects two bodies with a fixed length
Steps Step 1. Make sure you have two bodies
ready to go. Step 2. Define the joint. Step 3. Configure the joint’s properties
(What are the bodies? Where are the anchors? What is its rest length? Is it elastic or rigid?)
Step 4. Create the joint.
43
Example
Assume that we have a particle body
44
Particle p1 = new Particle();Particle p2 = new Particle();
DistanceJointDef djd = new DistanceJointDef();
djd.bodyA = p1.body;djd.bodyB = p2.body;
//if our rest length is in pixels, we need to convert it!djd.length = box2d.scalarPixelsToWorld(10);
Joint dj = (DistanceJoint) box2d.world.createJoint(djd);
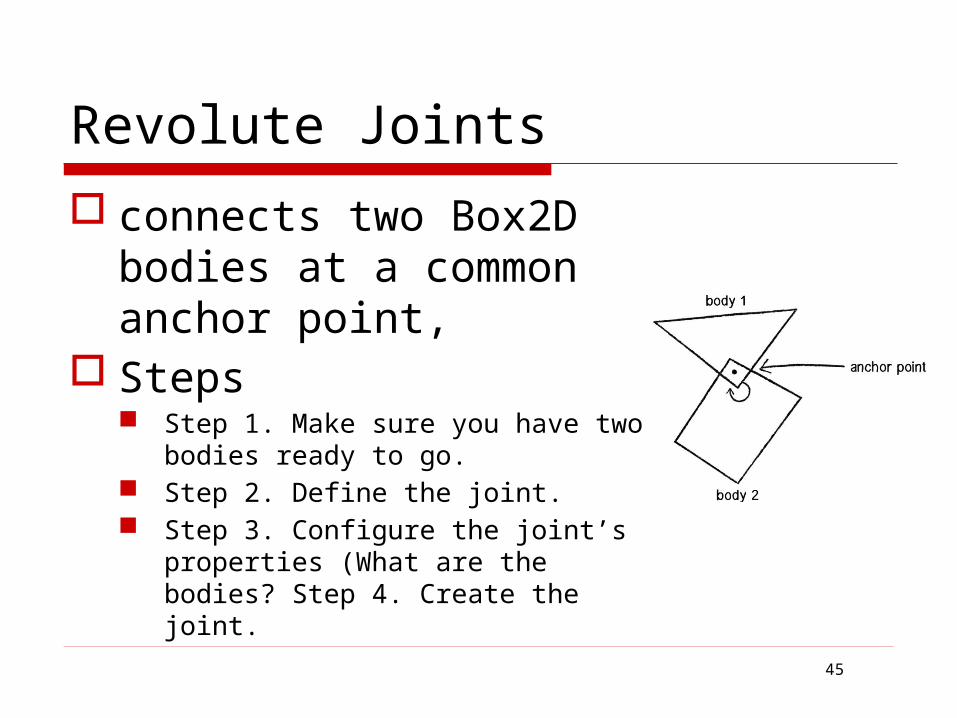
Revolute Joints
connects two Box2D bodies at a common anchor point,
Steps Step 1. Make sure you have two
bodies ready to go. Step 2. Define the joint. Step 3. Configure the joint’s
properties (What are the bodies? Step 4. Create the joint.
45

Example
Assume that we have a particle body
46
Box box1 = new Box();Box box2 = new Box();
RevoluteJointDef rjd = new RevoluteJointDef();
//the anchor point (i.e. where they are connected)is set with the functioninitialize().
rjd.initialize(box1.body, box2.body, box1.body.getWorldCenter());
rjd.motorSpeed = PI*2; // how fast?rjd.maxMotorTorque = 1000.0; // how powerful?rjd.enableMotor = false; // is it on?
rjd.enableLimit = true;rjd.lowerAngle = -PI/8;rjd.upperAngle = PI/8;
Joint joint = box2d.world.createJoint(rjd);

Exercise: Let’s making a windmill
47
class Windmill {
RevoluteJoint joint; Box box1; Box box2;
Windmill(float x, float y) {
// Initialize locations of two boxes box1 = new Box(x, y-20, 120, 10, false); box2 = new Box(x, y, 10, 40, true);
// Define joint as between two bodies RevoluteJointDef rjd = new RevoluteJointDef(); rjd.initialize(box1.body, box2.body, box1.body.getWorldCenter());
// Turning on a motor (optional) rjd.motorSpeed = PI*2; // how fast? rjd.maxMotorTorque = 1000.0; // how powerful? rjd.enableMotor = false; // is it on?
// Create the joint rjd.enableLimit = true; rjd.lowerAngle = -PI/8; rjd.upperAngle = PI/8; }
void display() { box2.display(); box1.display();
// Draw anchor just for debug Vec2 anchor = box2d.coordWorldToPixels(box1.body.getWorldCenter()); fill(0); noStroke(); ellipse(anchor.x, anchor.y, 8, 8); }}
Create a ball whenever you click the mouse!

48
Exercise: main functionimport pbox2d.*;import org.jbox2d.common.*;import org.jbox2d.dynamics.joints.*;import org.jbox2d.collision.shapes.*;import org.jbox2d.collision.shapes.Shape;import org.jbox2d.common.*;import org.jbox2d.dynamics.*;import org.jbox2d.dynamics.contacts.*;
// A reference to our box2d worldPBox2D box2d;
// An object to describe a Windmill (two bodies and one joint)Windmill windmill;
// An ArrayList of particles that will fall on the surfaceArrayList<Particle> particles;
void setup() { size(800,200); smooth();
// Initialize box2d physics and create the world box2d = new PBox2D(this); box2d.createWorld();
// Make the windmill at an x,y location windmill = new Windmill(width/2,175);
// Create the empty list particles = new ArrayList<Particle>();
}
void mousePressed(){ float sz = random(4,8); //radius particles.add(new Particle(mouseX,mouseY,sz));}
Create a particle class!!Class Particle{
//following the steps for creating body and shape
}
Applying Forces When we want to apply any forces other than
gravity, call applyForce() function
49
class Box { Body body;
void applyForce(Vec2 force) { Vec2 pos = body.getWorldCenter(); //Calling the Body's applyForce() function body.applyForce(force, pos); }
}
Our earlier forces examples assumed that the force was always applied at the mover’s center. Here we get to specify exactly where on the body the force is applied
Collision Detection How do we know when two objects
collide? beginContact() is triggered when two
shapes collide
50
void setup() { box2d = new PBox2D(this); box2d.createWorld(); Add this line if you want to listen for collisions. box2d.listenForCollisions();}
void beginContact(Contact cp) { println("Something collided in the Box2D World!");}

51
Collision Call-back functions1. beginContact() —Triggered whenever two shapes first
come into contact with each other.2. endContact() —Triggered over and over again as long as
shapes continue to be in contact.3. preSolve() —Triggered before Box2D solves the outcome
of the collision, i.e. before beginContact(). It can be used to disable a collision if necessary.
4. postSolve() —Triggered after the outcome of the collision is solved. It allows you to gather information about that “solution” (known as an “impulse”).
endContact() works identically to beginContact(), the only difference being that it occurs the moment bodies separate.
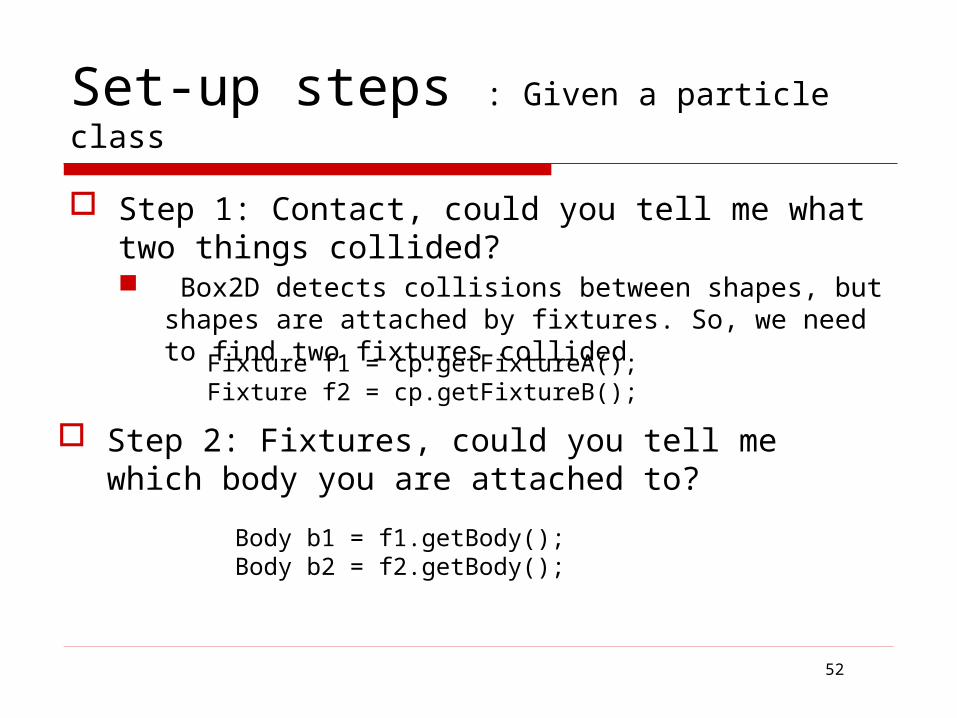
Set-up steps : Given a particle class
Step 1: Contact, could you tell me what two things collided? Box2D detects collisions between shapes, but shapes
are attached by fixtures. So, we need to find two fixtures collided
52
Fixture f1 = cp.getFixtureA();Fixture f2 = cp.getFixtureB();
Step 2: Fixtures, could you tell me which body you are attached to?
Body b1 = f1.getBody();Body b2 = f2.getBody();
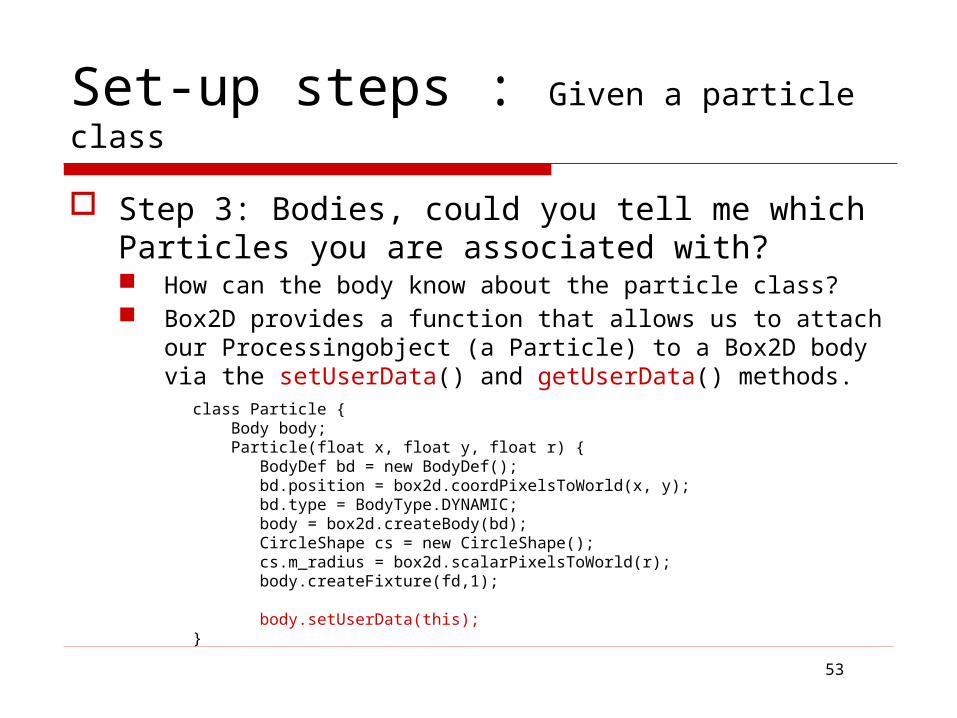
Set-up steps : Given a particle class
Step 3: Bodies, could you tell me which Particles you are associated with? How can the body know about the particle class? Box2D provides a function that allows us to attach our
Processingobject (a Particle) to a Box2D body via the setUserData() and getUserData() methods.
53
class Particle { Body body; Particle(float x, float y, float r) { BodyDef bd = new BodyDef(); bd.position = box2d.coordPixelsToWorld(x, y); bd.type = BodyType.DYNAMIC; body = box2d.createBody(bd); CircleShape cs = new CircleShape(); cs.m_radius = box2d.scalarPixelsToWorld(r); body.createFixture(fd,1);
body.setUserData(this);}

beginContact() call-back function
54
void beginContact(Contact cp) { Fixture f1 = cp.getFixtureA(); Fixture f2 = cp.getFixtureB(); Body b1 = f1.getBody(); Body b2 = f2.getBody();
// When we pull the “user data” object out of the Body object, we have to remind our program // that it is a Particle object. Box2D doesn’t know this.
Particle p1 = (Particle) b1.getUserData(); Particle p2 = (Particle) b2.getUserData();
//Once we have the particles, we can do anything to them. Here we just call a function that // changes their color.
p1.change(); p2.change();}
void change() { col = color(255, 0, 0); }

What if the colliding objects are not particle object?
What if the colliding objects are boundary, box or any other class?
Use the query function
You cannot create or destroy Box2D entities inside of beginContact(), endContact()
55
Object o1 = b1.getUserData();//Asking that object if it’s a Particleif (o1.getClass() == Particle.class) { Particle p = (Particle) o1; p.change();}

Integration & Differentiation Integration(적분 ), Differentiation(미분 ) Differentiation : The derivative of a function is a
measure of how a function changes over time. Velocity can be described as the “derivative” of
location Acceleration is the “derivative” of velocity.
Integration : inverse of differentiation, How can we update location from given velocity? Location is the integral of velocity Velocity is the integral of acceleration
56

Euler integration The simplest form of integration and very easy
to implement in our code
57
velocity.add(acceleration);location.add(velocity);
But, not accurate! : Real world is continuous, but our world is discrete
Real world is curveBut, our world is line segments

Better integration methods
semi-explicit Euler : Box2D use http://en.wikipedia.org/wiki/
Symplectic_Euler_method Runge-Kutta : other game engine Verlet integration
Do not store velocity, we always know the all past locations and current locations.
Library toxiclibs(http://toxiclibs.org/)58

Toxiclib
59
Verlet Physics with toxiclibs toxiclibs includes a suite of other wonderful packages
that help with audio, color, geometry, and more designed specifically for use with Processing
coordinate system that we’ll use for the physics engine is the coordinate system of Processing
all of the physics simulations and functions work in both two and three dimensions
Does not have collision detection Best work if you have lots of particles flying around the
screen. Sometimes they attract each other. Sometimes they repel each other. And sometimes they are connected with springs. High performance due to the Verlet integration algorithm
60

Comparison
61
Feature Box2D toxiclibs Verlet-Physics
Collision geometry Yes No
3D physics No Yes
Particle attraction /repulsion forces
No Yes
Spring connections Yes Yes
Other connections: revolute,pulley, gear, pris-matic
Yes No
Motors Yes No
Friction Yes No

VerletPhysics toxiclibs (http://toxiclibs.org/) core elements
62
Box2D toxiclibs VerletPhysics
World VerletPhysics
Body VerletParticle
Shape Nothing! toxiclibs does not handle shape geometry
Fixture Nothing! toxiclibs does not handle shape geometry
Joint VerletSpring
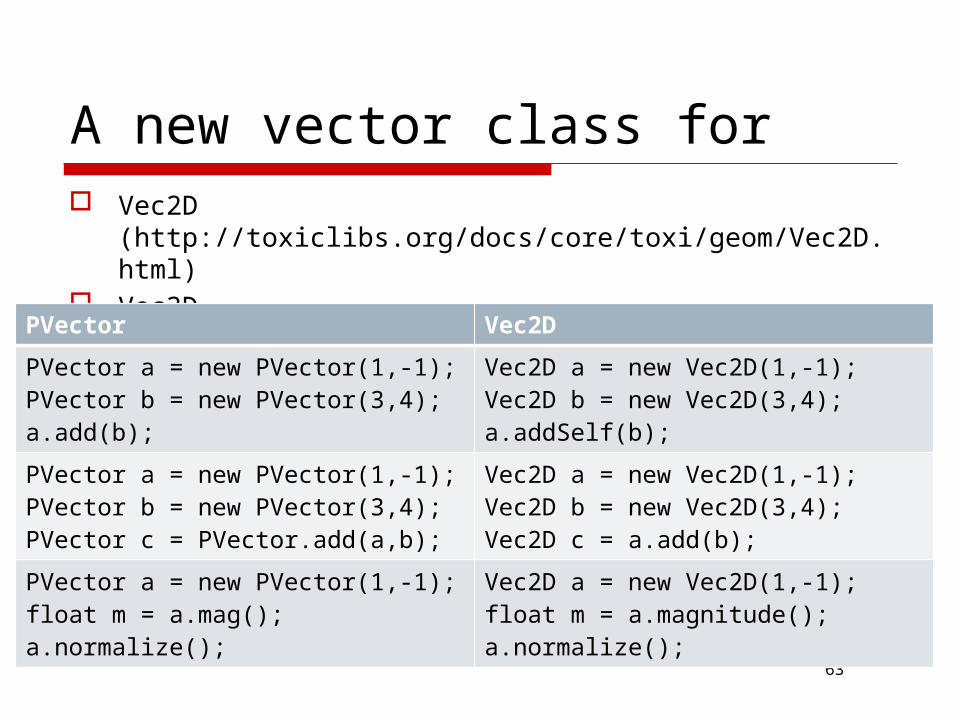
A new vector class for Vec2D
(http://toxiclibs.org/docs/core/toxi/geom/Vec2D.html) Vec3D
(http://toxiclibs.org/docs/core/toxi/geom/Vec3D.html)
63
PVector Vec2D
PVector a = new PVector(1,-1);PVector b = new PVector(3,4);a.add(b);
Vec2D a = new Vec2D(1,-1);Vec2D b = new Vec2D(3,4);a.addSelf(b);
PVector a = new PVector(1,-1);PVector b = new PVector(3,4);PVector c = PVector.add(a,b);
Vec2D a = new Vec2D(1,-1);Vec2D b = new Vec2D(3,4);Vec2D c = a.add(b);
PVector a = new PVector(1,-1);float m = a.mag();a.normalize();
Vec2D a = new Vec2D(1,-1);float m = a.magnitude();a.normalize();
Basic setup
64
import toxi.physics2d.*;import toxi.physics2d.behaviors.*;import toxi.geom.*;
VerletPhysics2D physics;void setup() { //Creating a toxiclibs Verlet physics world physics=new VerletPhysics2D();
//put hard boundaries physics.setWorldBounds(new Rect(0,0,width,height));
//set the gravity physics.addBehavior(new GravityBehavior(new Vec2D(0,0.5)));}
void draw() { // This is the same as Box2D’s “step()” function physics.update();}

Example codes
I will give several example source codes that use the toxiclib.
If you are interested in this code, take a look at those codes and use for your project
65







