1
CAGING OF RIGID POLYTOPES VIA DISPERSION CONTROL OF POINT FINGERS
Peam PipattanasompornAdvisor: Attawith Sudsang

2
Motivation?
!
!
!
3
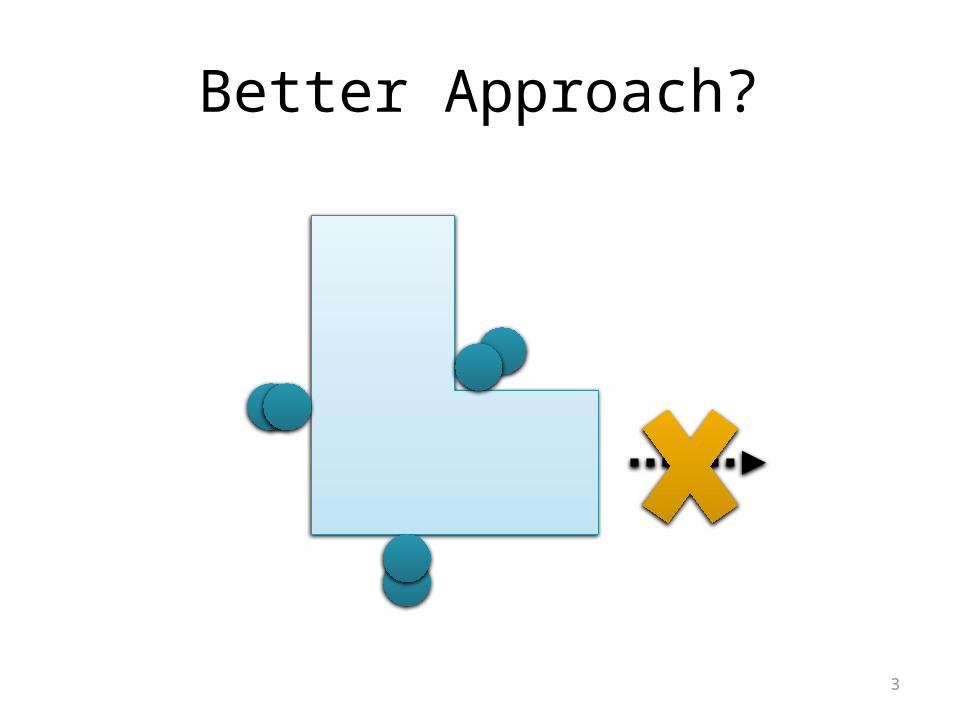
Better Approach?

4
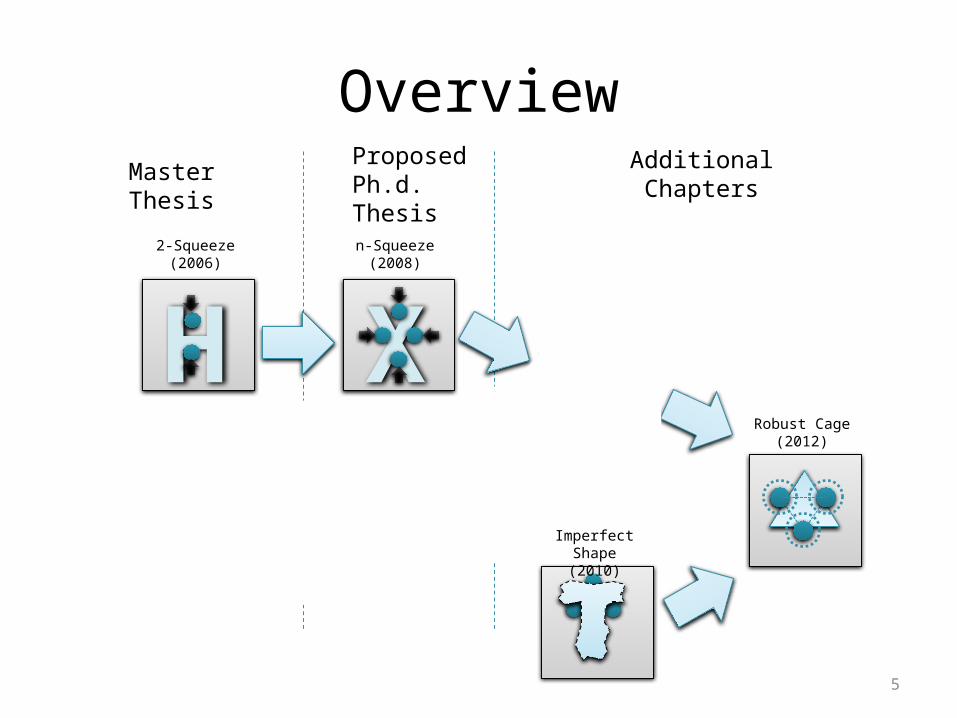
OverviewMaster Thesis
ProposedPh.d. Thesis
Additional Chapters
XL
H
S C
Fix Cage(2011)
Imperfect Shape (2010)
Robust Cage(2012)
n-Squeeze(2008)
n-Stretch(2008)
2-Squeeze(2006)
2-Stretch(2006)
5
Fix Cage(2011)
n-Stretch(2008)
2-Stretch(2006)
OverviewMaster Thesis
ProposedPh.d. Thesis
Additional Chapters
XL
H
S C Imperfect Shape (2010)
Robust Cage(2012)
n-Squeeze(2008)
2-Squeeze(2006)
6
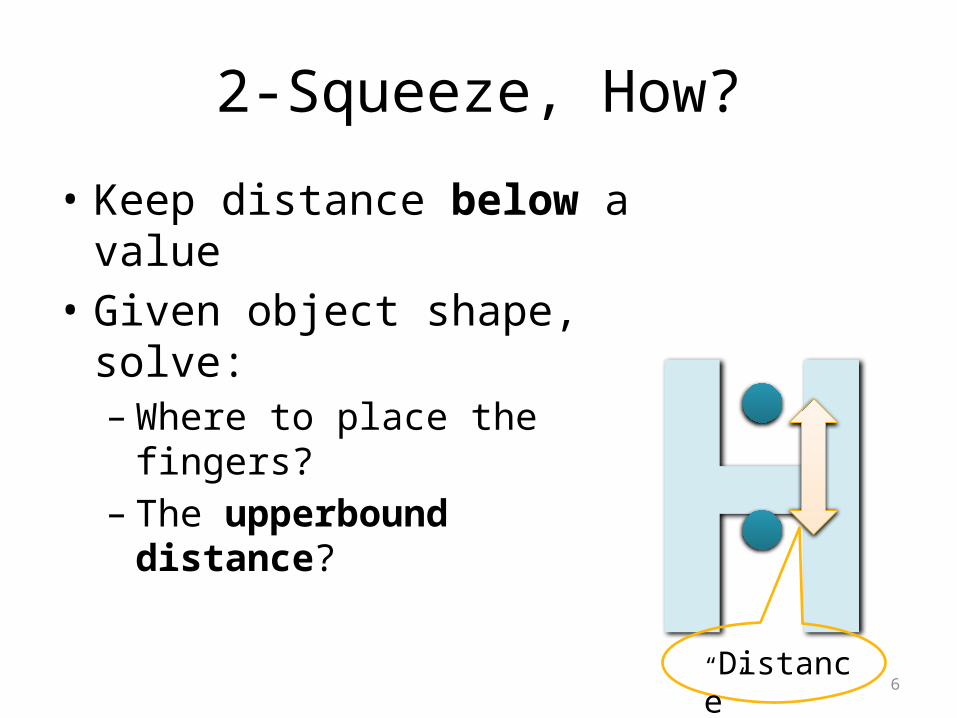
2-Squeeze, How?
• Keep distance below a value• Given object shape, solve:– Where to place the fingers?– The upperbound distance?
H“Distance”
7
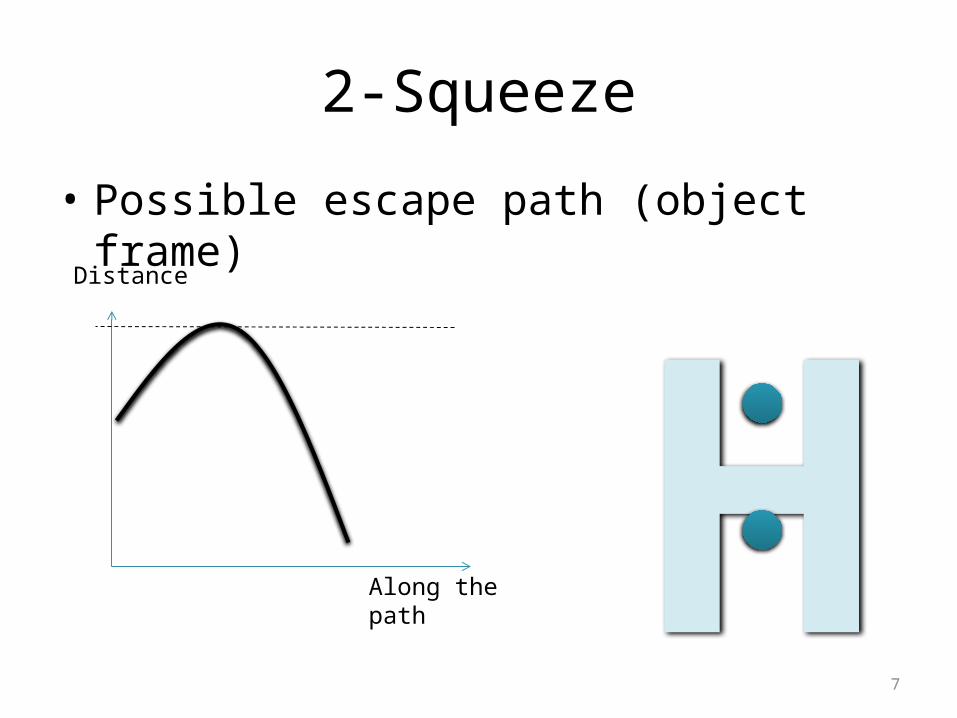
2-Squeeze
• Possible escape path (object frame)
HAlong the path
Distance

8
2-Squeeze
• “Better” escape path
HDistance
“Better”
Upperbound
Initial
Along the path
9
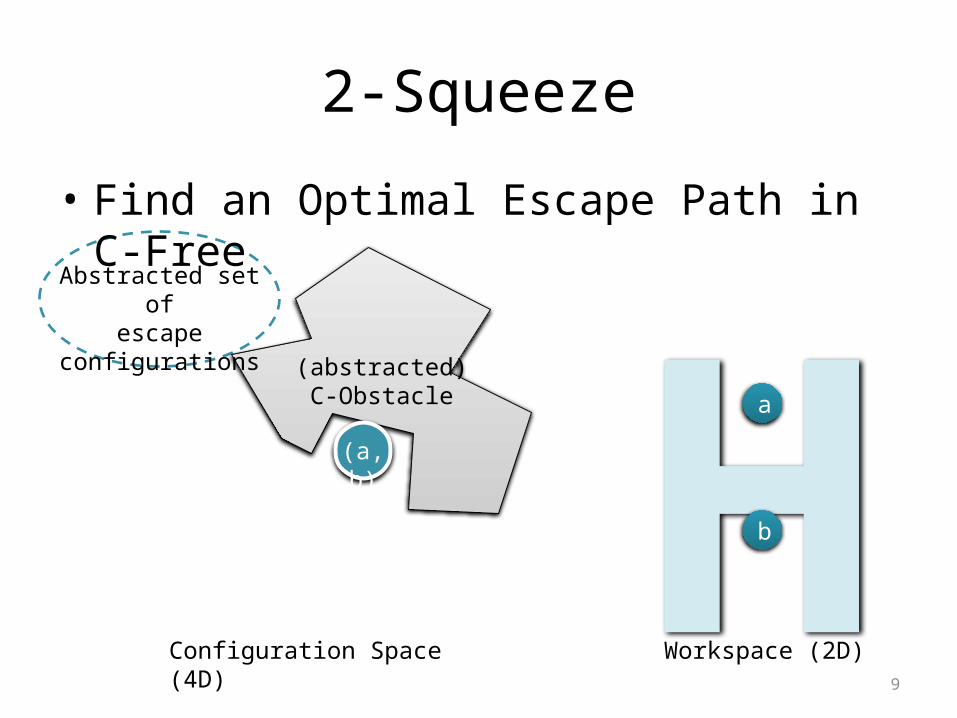
2-Squeeze
• Find an Optimal Escape Path in C-Free
HWorkspace (2D)
b
a
Configuration Space (4D)
(abstracted)C-Obstacle
(a,b)
Abstracted set ofescape configurations
10
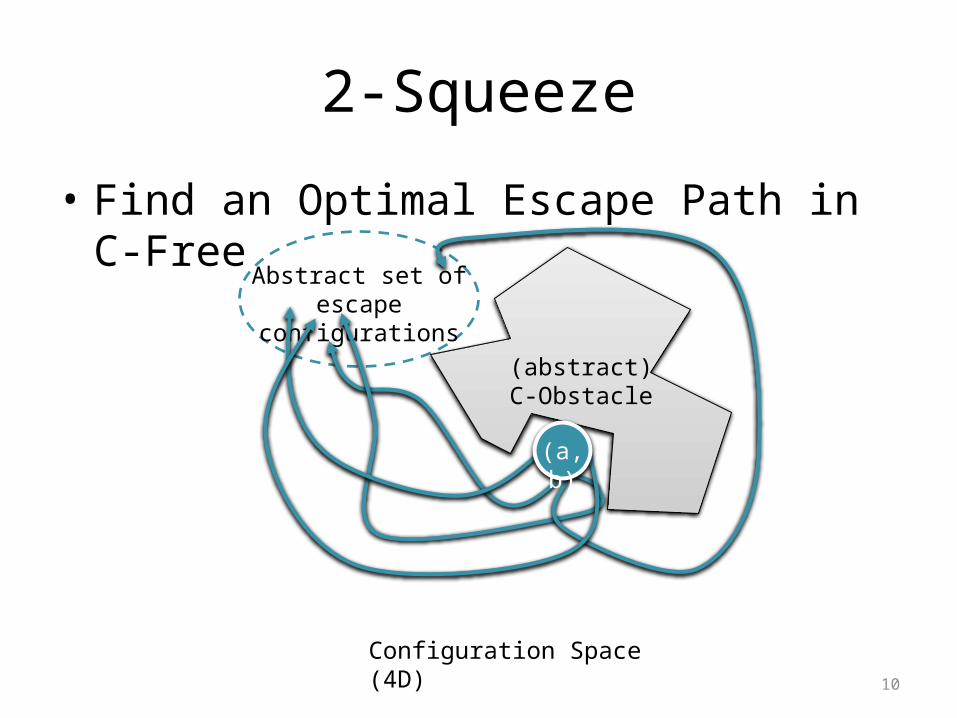
2-Squeeze
• Find an Optimal Escape Path in C-Free
Configuration Space (4D)
(abstract)C-Obstacle
Abstract set ofescape configurations
(a,b)
11
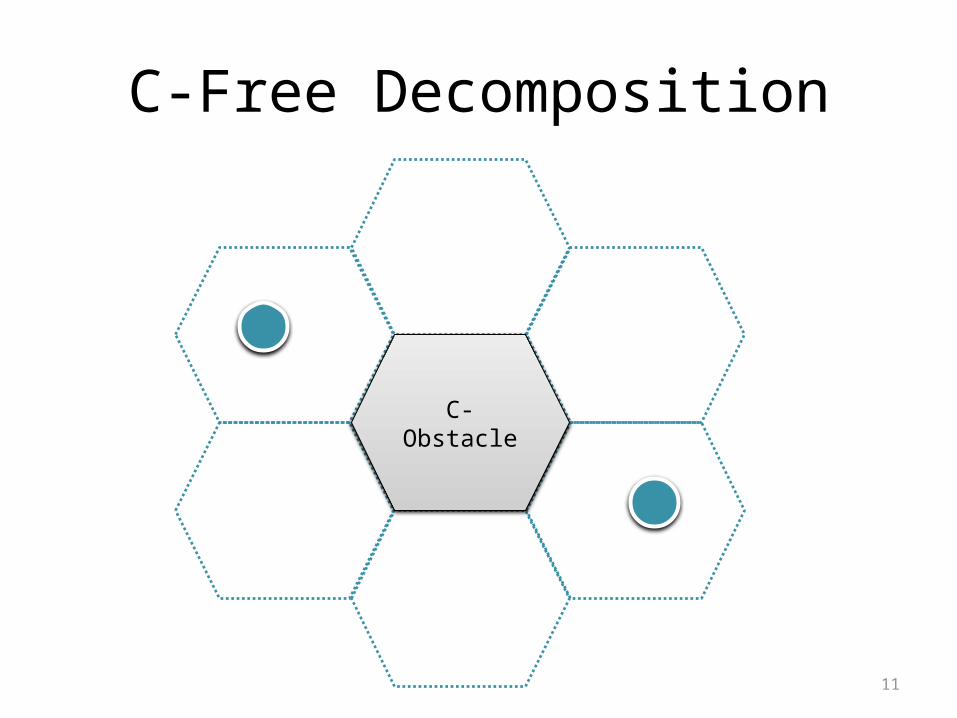
C-Free Decomposition
C-Obstacle
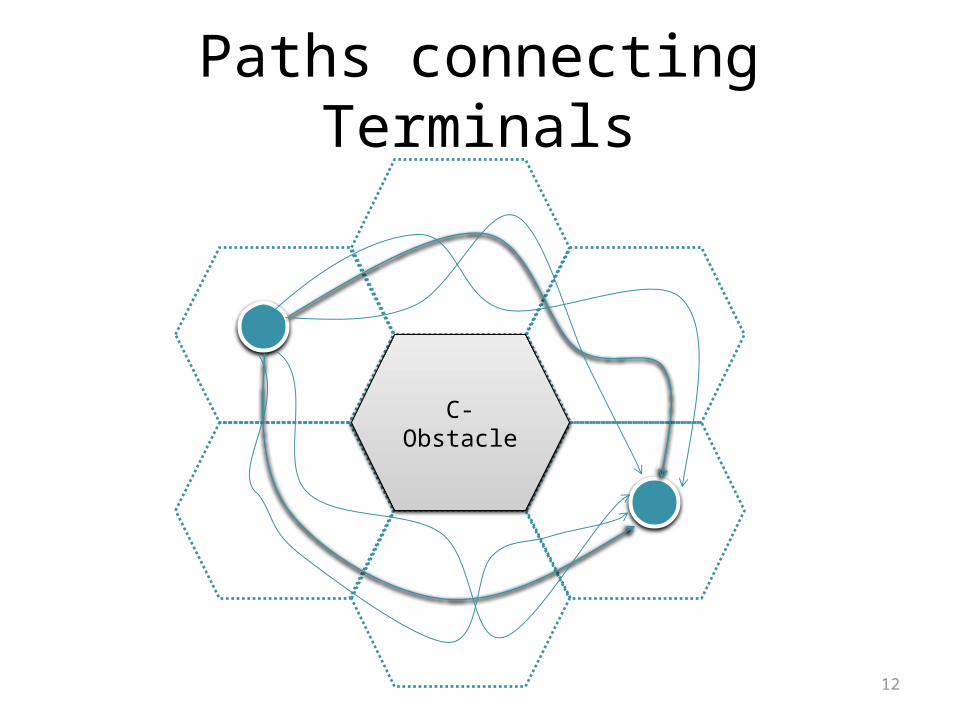
12
Paths connecting Terminals
C-Obstacle
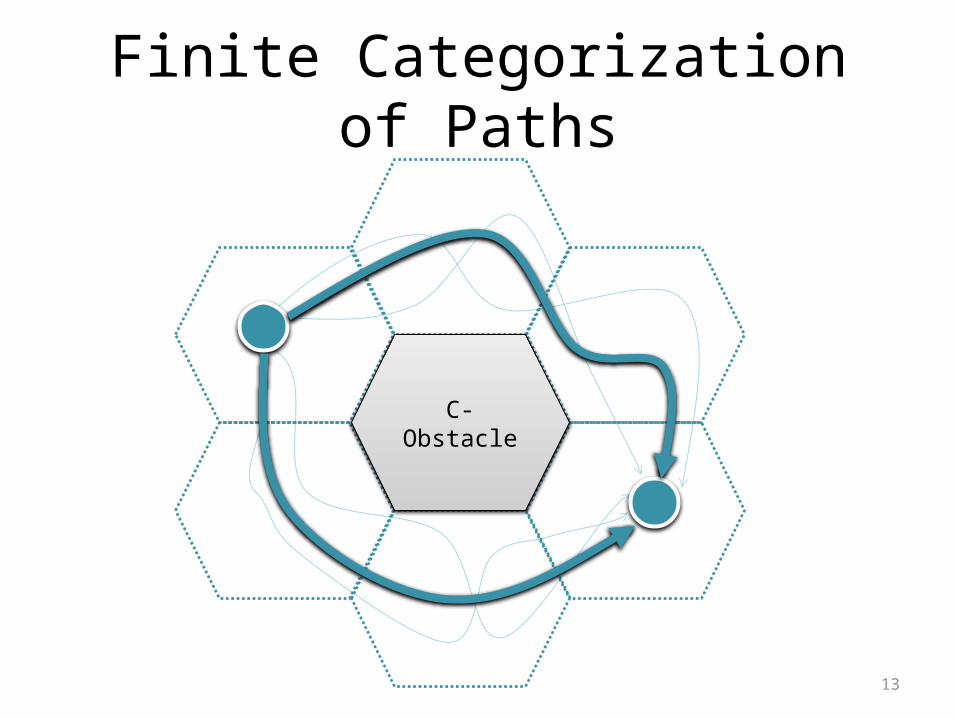
13
Finite Categorization of Paths
C-Obstacle
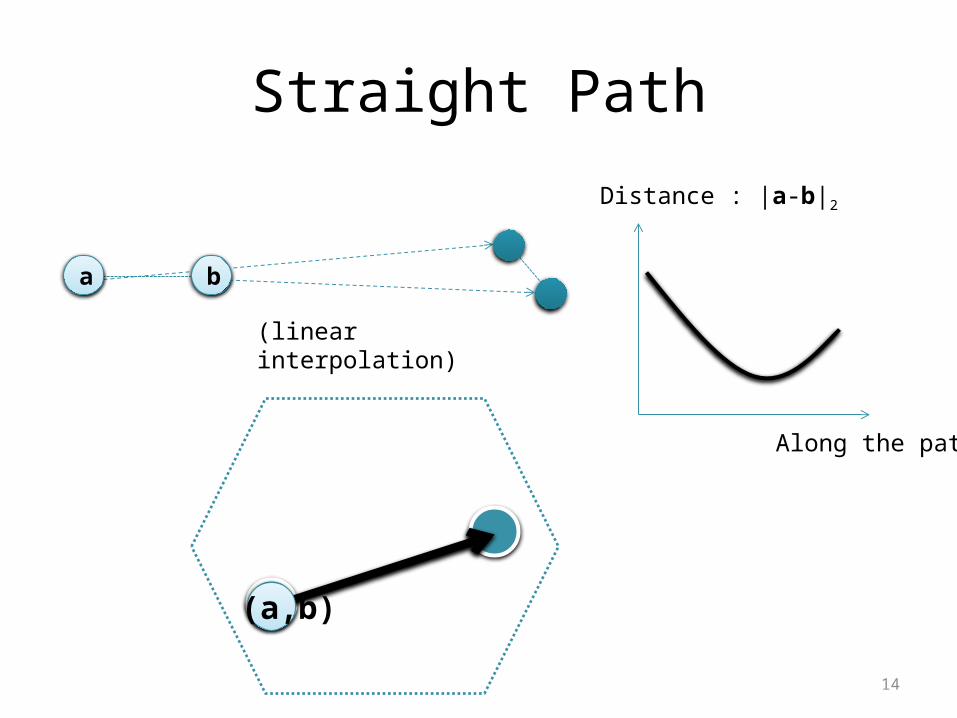
14
Straight Path
Distance : |a-b|2
Along the path
(linear interpolation)
ba
(a,b)
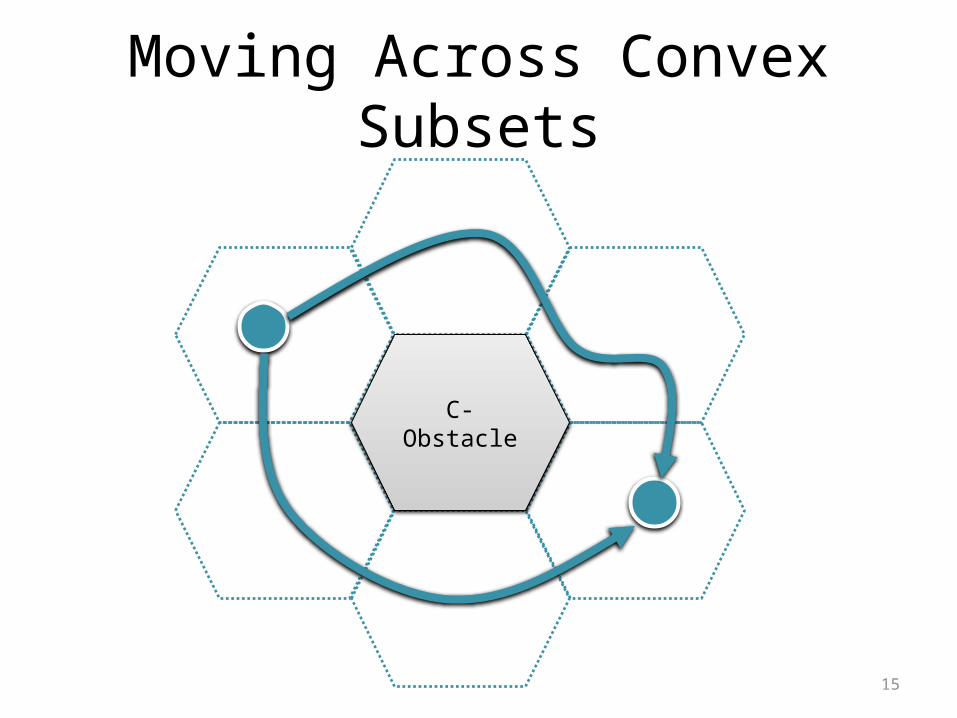
15
Moving Across Convex Subsets
C-Obstacle
16
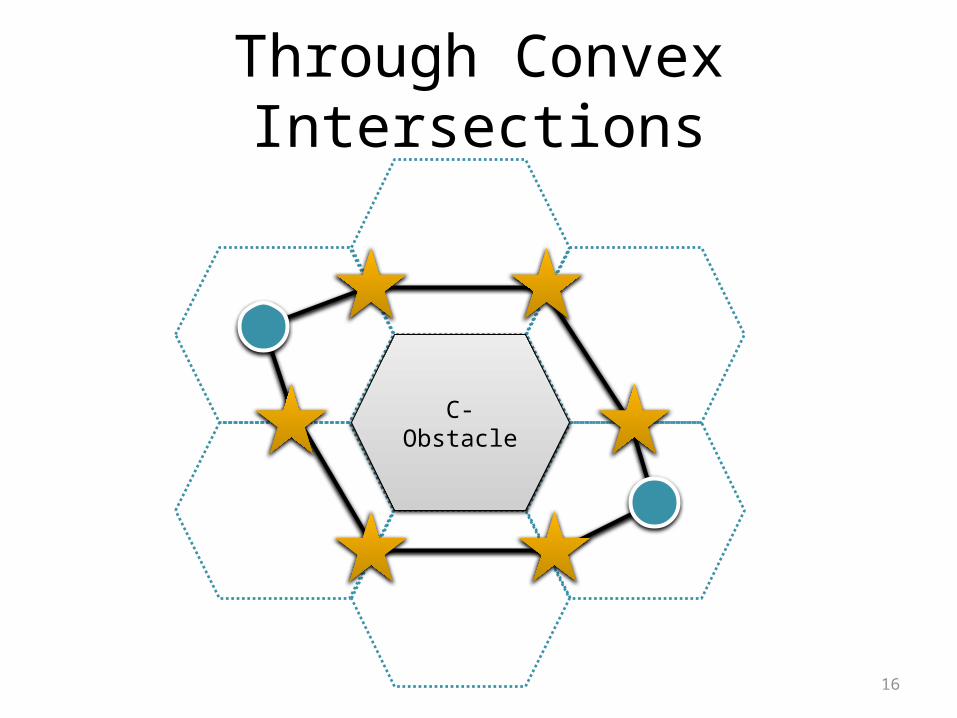
Through Convex Intersections
C-Obstacle
17
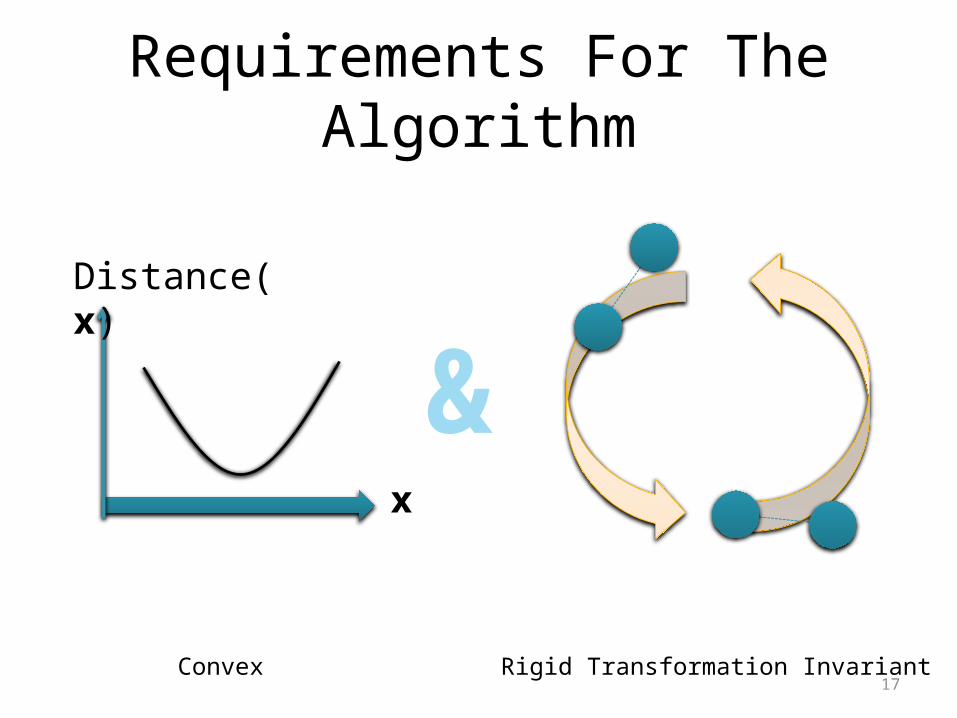
Requirements For The Algorithm
Distance(x)
Rigid Transformation InvariantConvex
&x
18
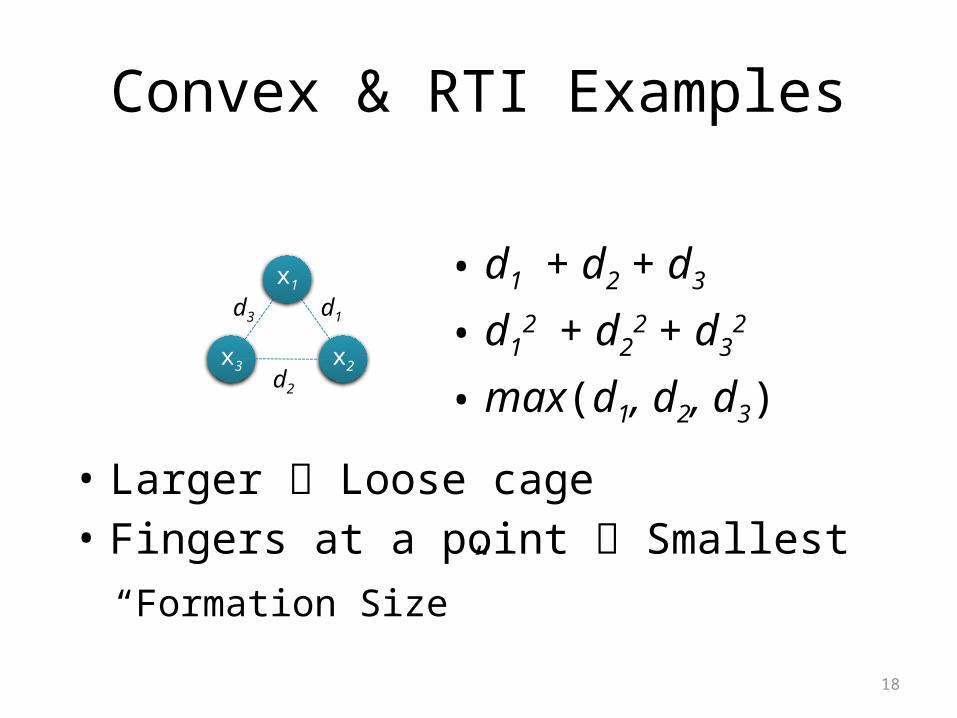
Convex & RTI Examples
• d1 + d2 + d3
• d12 + d2
2 + d32
• max(d1, d2, d3)
d3 d1
d2
x1
x2x3
• Larger Loose cage• Fingers at a point Smallest
“Formation Size”
19
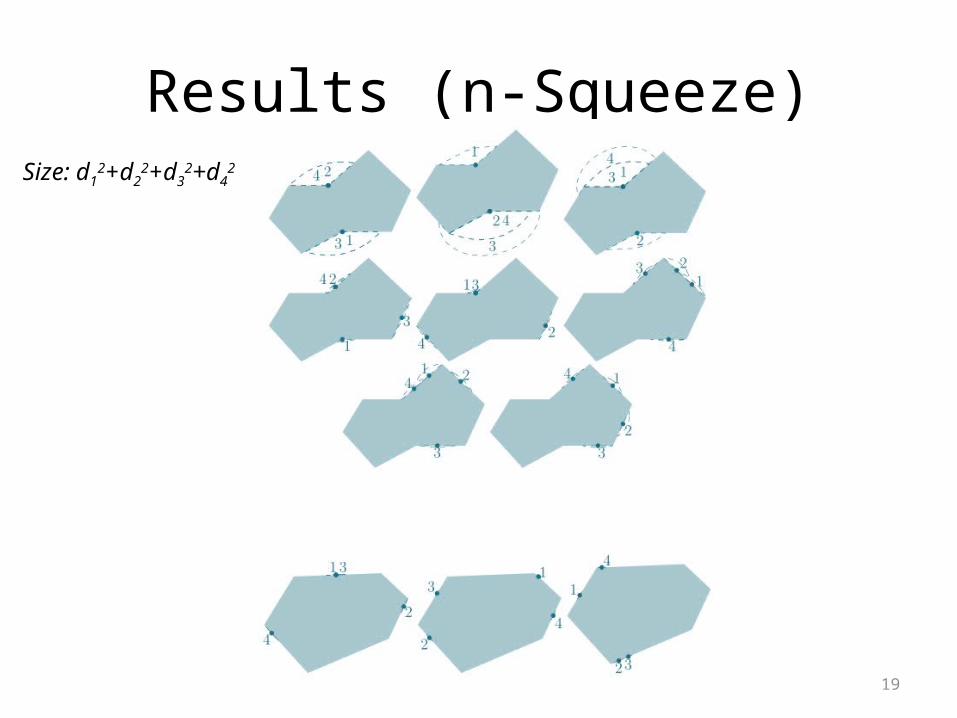
Results (n-Squeeze)Size: d1
2+d22+d3
2+d42
20
1
23
1
23
1
23
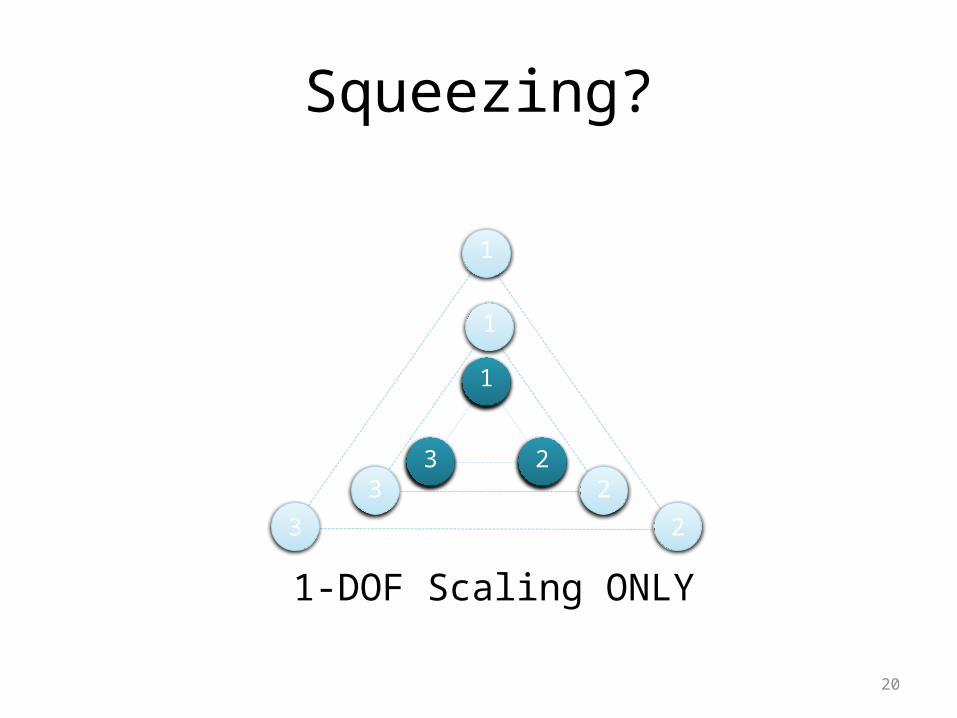
Squeezing?
1
23
1-DOF Scaling ONLY
21
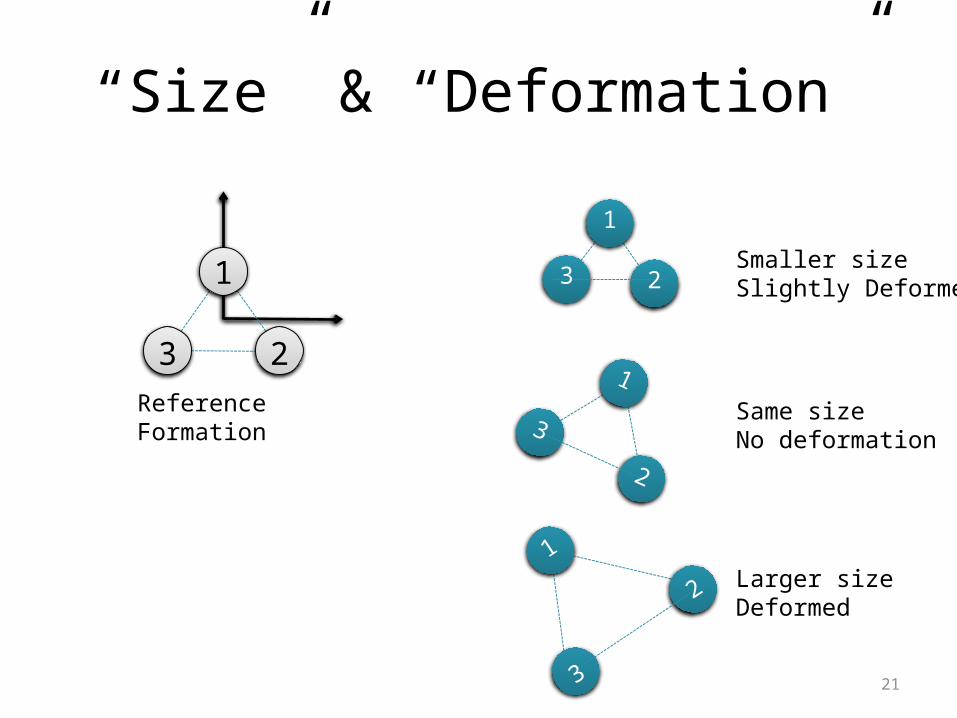
“Size” & “Deformation”
1
23Reference Formation
1
2
3Same sizeNo deformation
Larger sizeDeformed
1
2
3
Smaller sizeSlightly Deformed
1
23
22
Smaller sizeSlightly Deformed
1
23
1
2
3Same sizeNo deformationSame Formation
Larger sizeDeformed
1
2
3
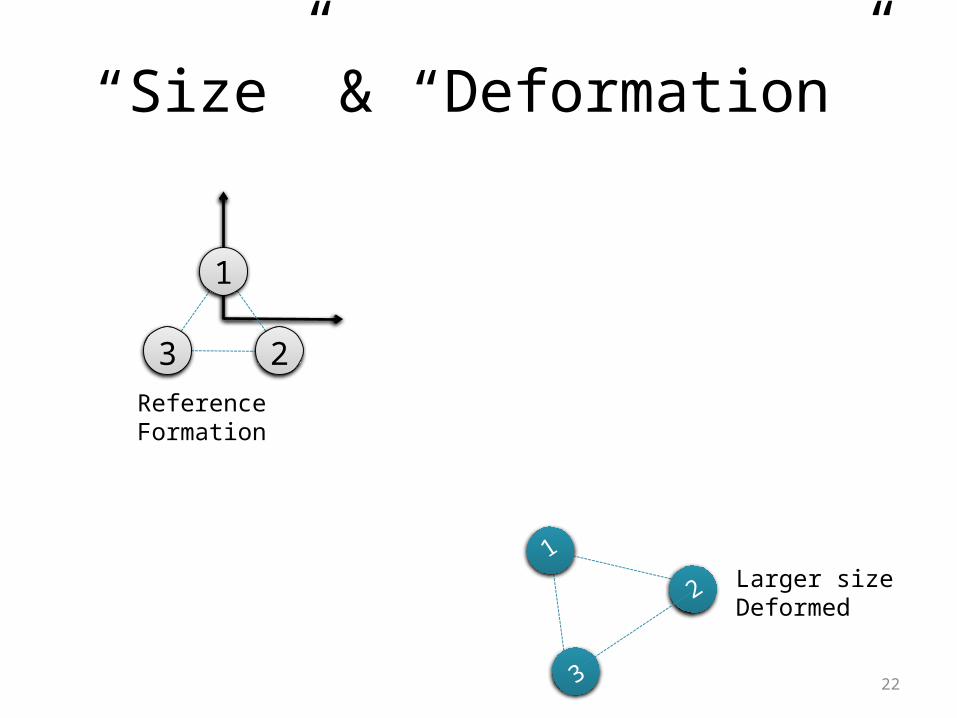
“Size” & “Deformation”
Reference Formation
1
23

23
Smaller sizeSlightly Deformed
1
23
1
2
3Same sizeNo deformationSame Formation
Larger sizeDeformed
1
2
3
“Size” & “Deformation”
Reference Formation
12
3

24
Smaller sizeSlightly Deformed
1
23
1
2
3Same sizeNo deformationSame Formation
Larger sizeDeformed
1
2
3
“Size” & “Deformation”
Reference Formation
12
3
25
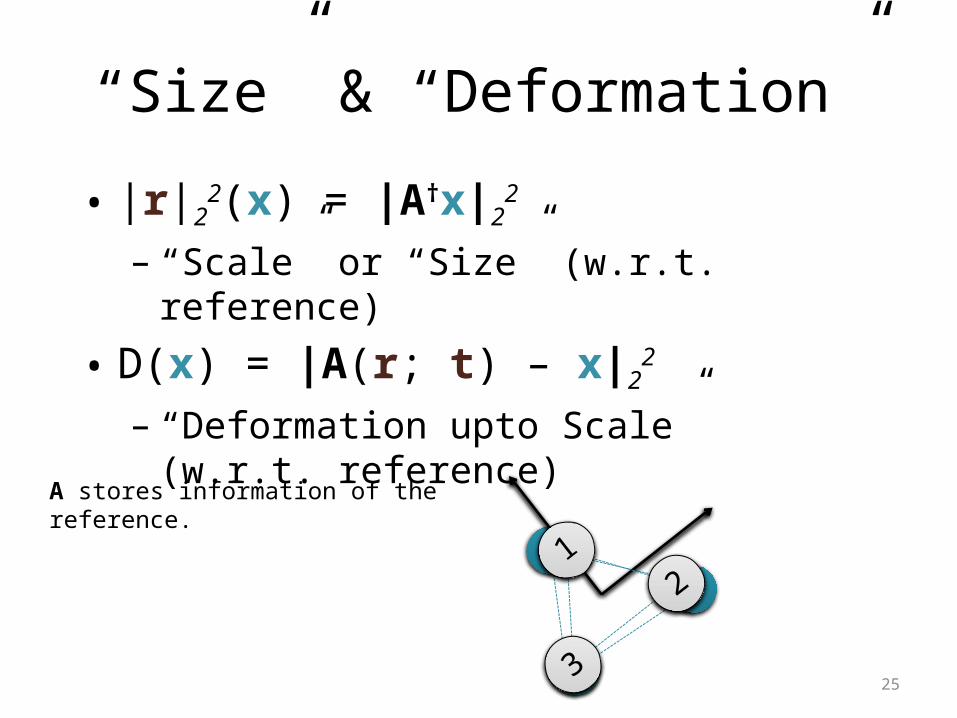
“Size” & “Deformation”
• |r|22(x) = |A†x|2
2
– “Scale” or “Size” (w.r.t. reference)
• D(x) = |A(r; t) – x|22
– “Deformation upto Scale” (w.r.t. reference)
1
2
3
12
3
A stores information of the reference.

26
Squeezing ?
1
23
1
23
1
23
1-DOF Scaling ONLY
Size = |r|22 < ???
D ≤ 0&
Convex& RTI
Convex& RTI
27
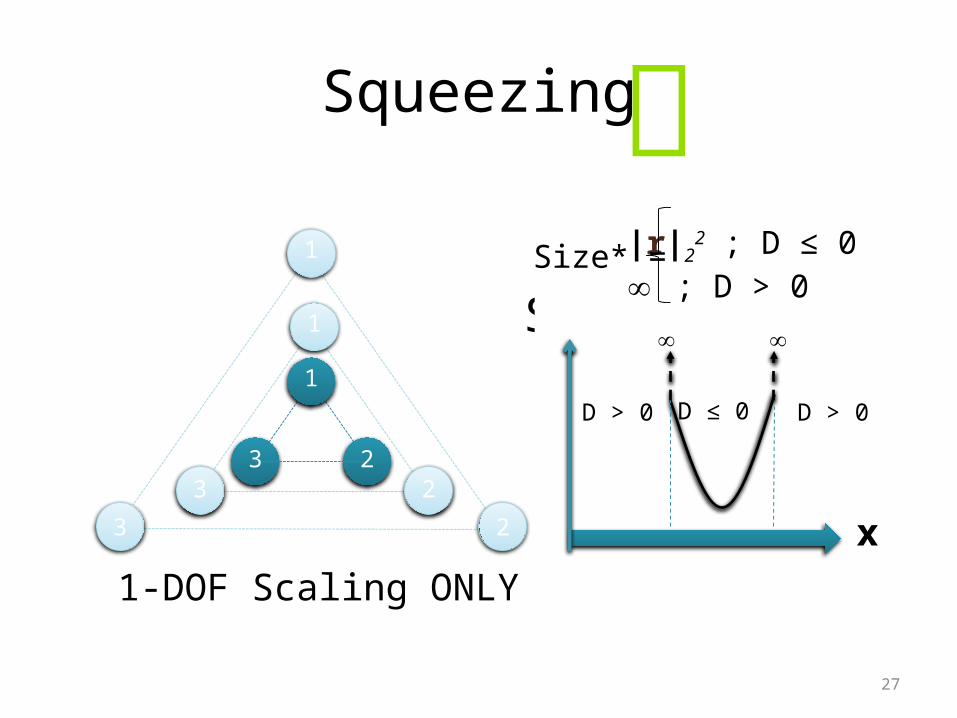
Squeezing
1
23
1
23
1
23
1-DOF Scaling ONLY
Size = |r|22 < ???
D ≤ 0&
x
D > 0D > 0
D ≤ 0
|r|22 ; D ≤ 0
; D > 0Size* =

28
Fix Formation Cage
1
23
Size* = 1
ConvexConstraint
Convex& RTI
Size* 1Size* ≤ 1
“Stretch”“Squeeze” &
29
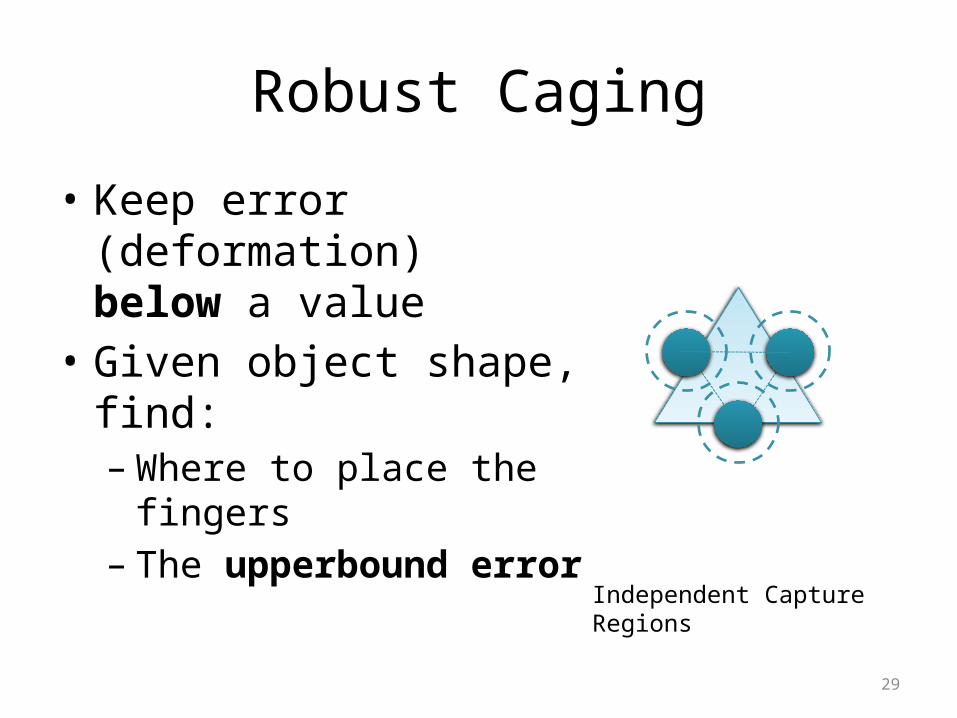
Robust Caging
Independent Capture Regions
• Keep error (deformation) below a value
• Given object shape, find:– Where to place the fingers– The upperbound error
30
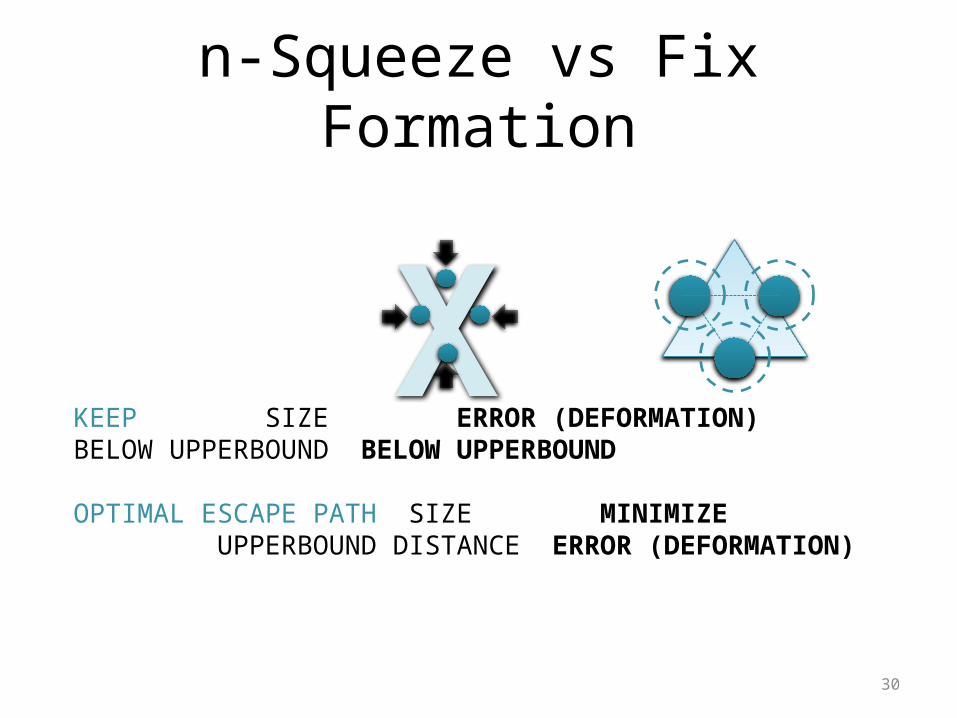
n-Squeeze vs Fix Formation
KEEP SIZE ERROR (DEFORMATION)BELOW UPPERBOUND BELOW UPPERBOUND
OPTIMAL ESCAPE PATH SIZE MINIMIZEUPPERBOUND DISTANCE ERROR (DEFORMATION)
X

31
Error Tolerance
inf r,tϵR2
223 3
1 1
2
23
1
D2 =23
1
inf |r|2=1tϵR2
223 3
1 1
p
23
1
Ep =23
1
NOT CONVEX!
r + t -
r + t -
“Placement Error”
“Placement Error upto Scale”
32
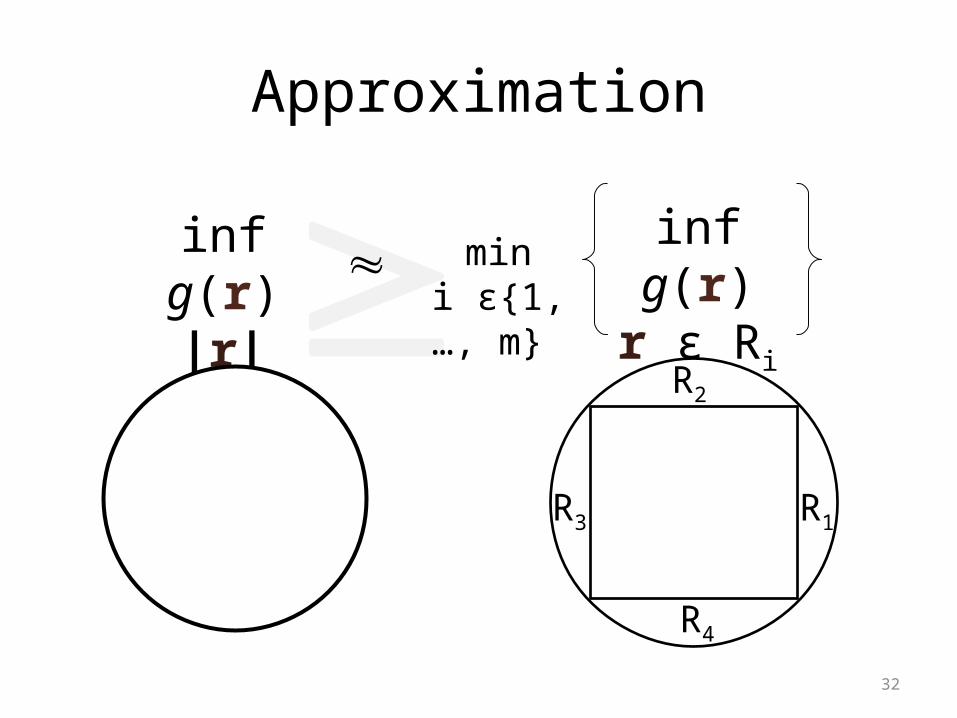
Approximation
inf g(r)|r|2=1
inf g(r)r ϵ Ri
mini ϵ{1,…, m}
R1
R2
R3
R4
33
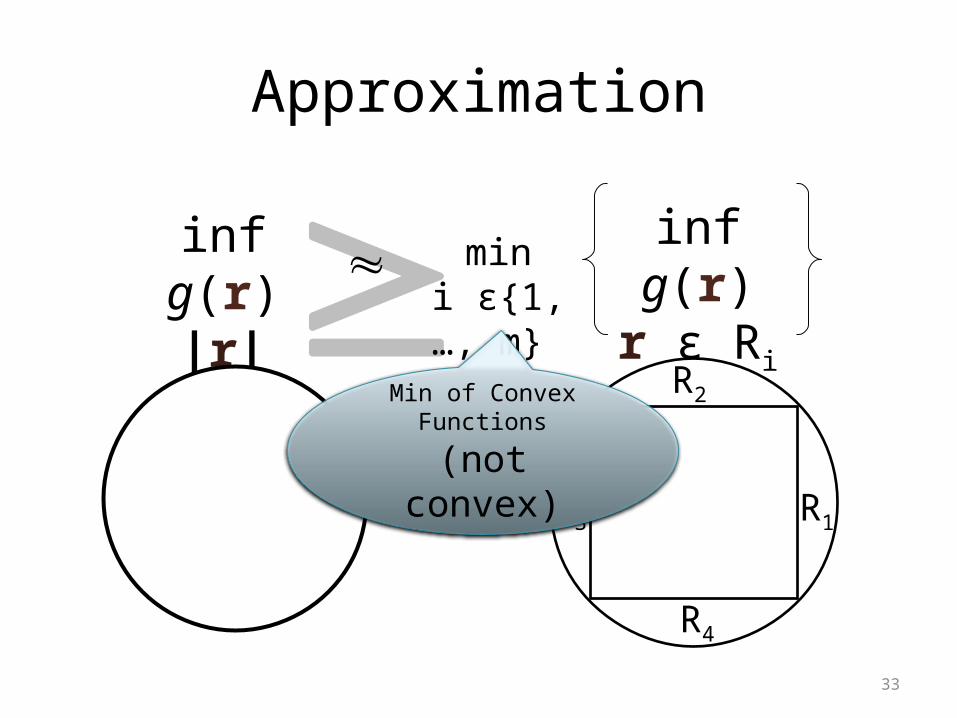
Approximation
inf g(r)|r|2=1
inf g(r)r ϵ Ri
mini ϵ{1,…, m}
R1
R2
R3
R4
Min of Convex Functions
(not convex)
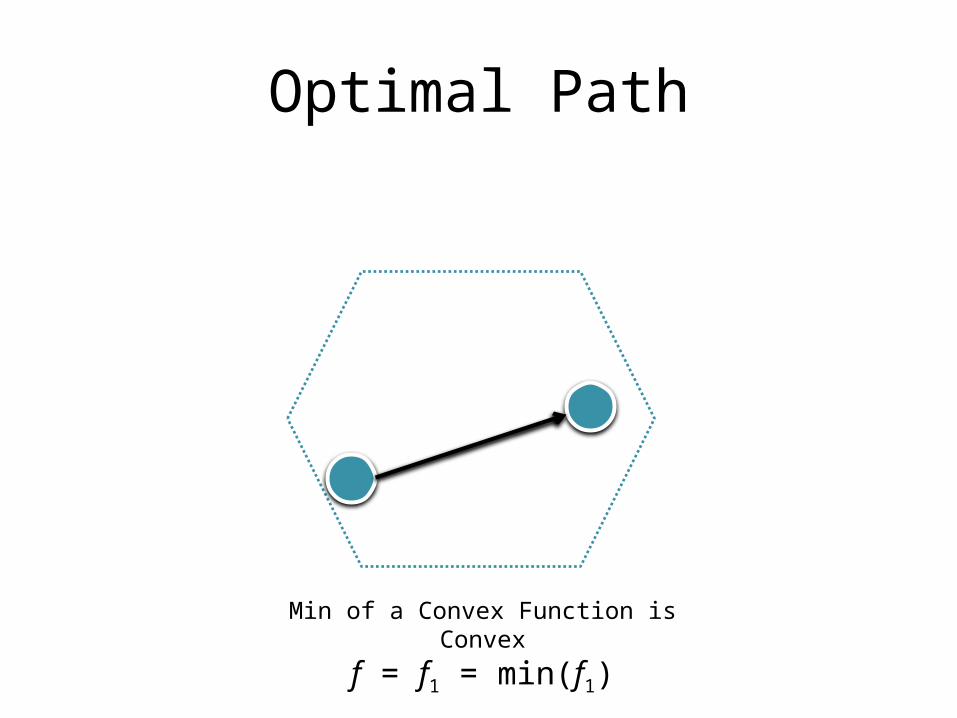
Optimal Path
Min of a Convex Function is Convex
f = f1 = min(f1)

35
Optimal Path
Min of Two Convex Functions
f = min(f1, f2)
f1 = f f = f2f1 = f = f2
35
36
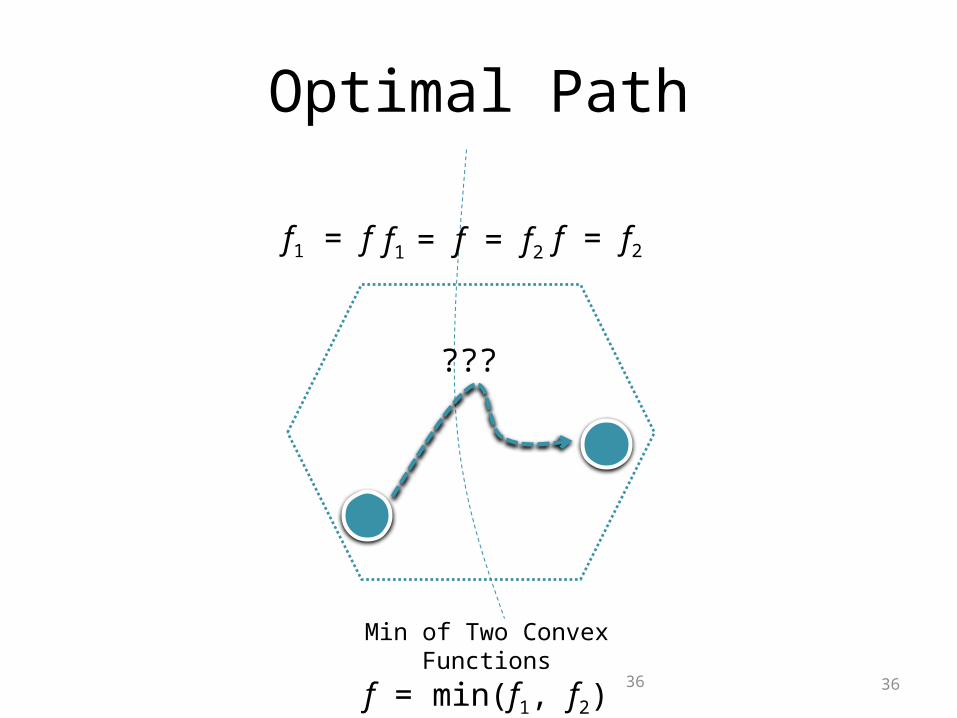
Optimal Path
Min of Two Convex Functions
f = min(f1, f2)
f1 = f f = f2f1 = f = f2
36
???
Optimal Path
21
37
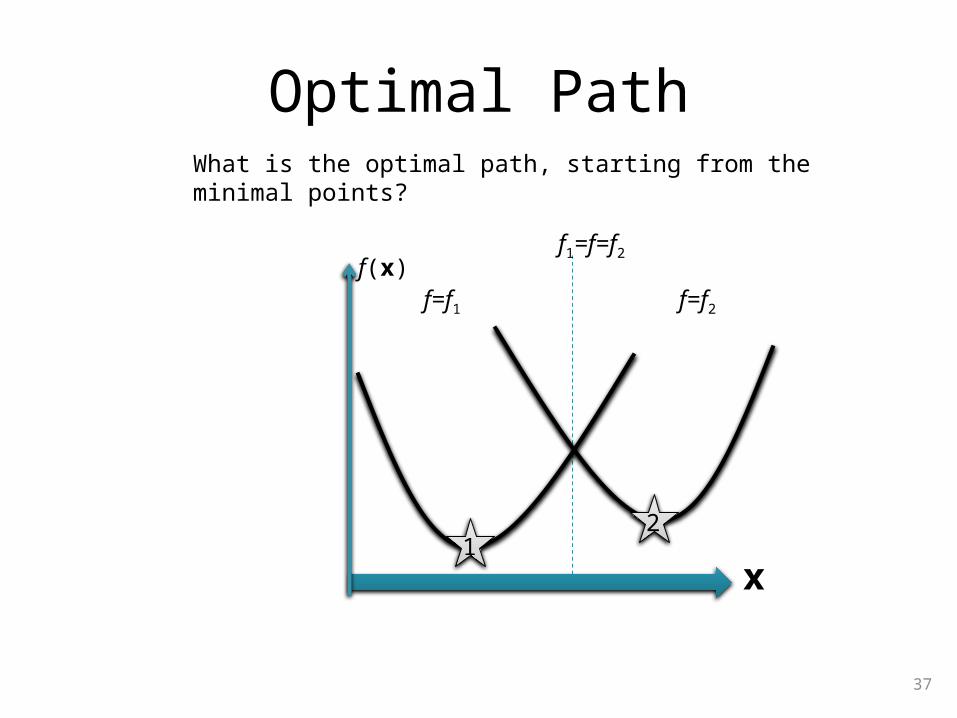
x
f(x)f1=f=f2
f=f2f=f1
What is the optimal path, starting from the minimal points?
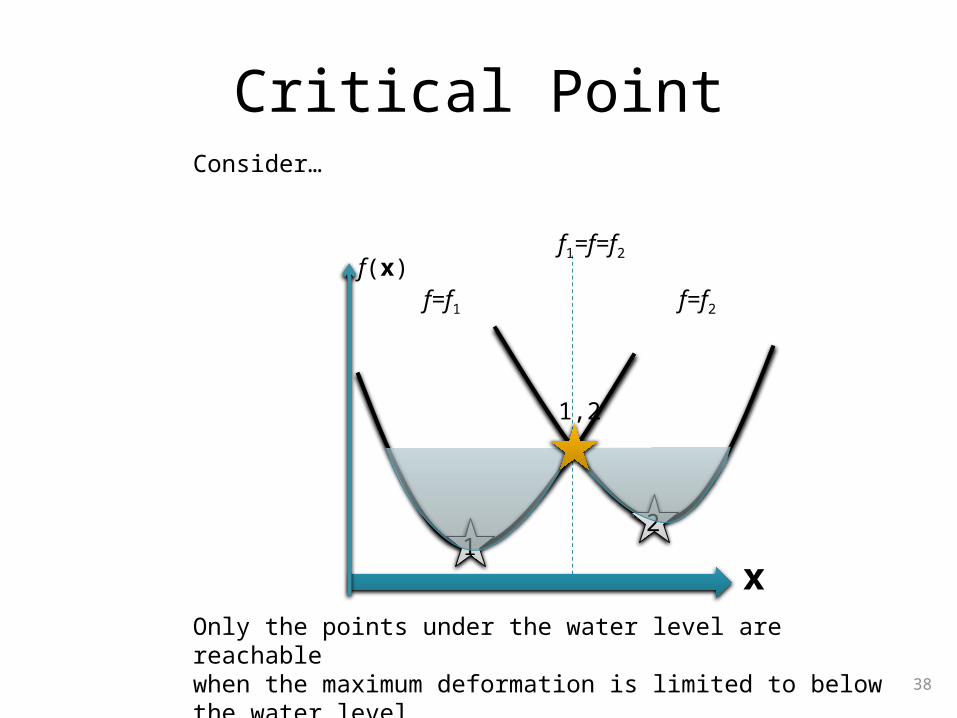
Critical Point
21
38
x
f1=f=f2
f=f2f=f1
Consider…
1,2
Only the points under the water level are reachable when the maximum deformation is limited to below the water level.
f(x)
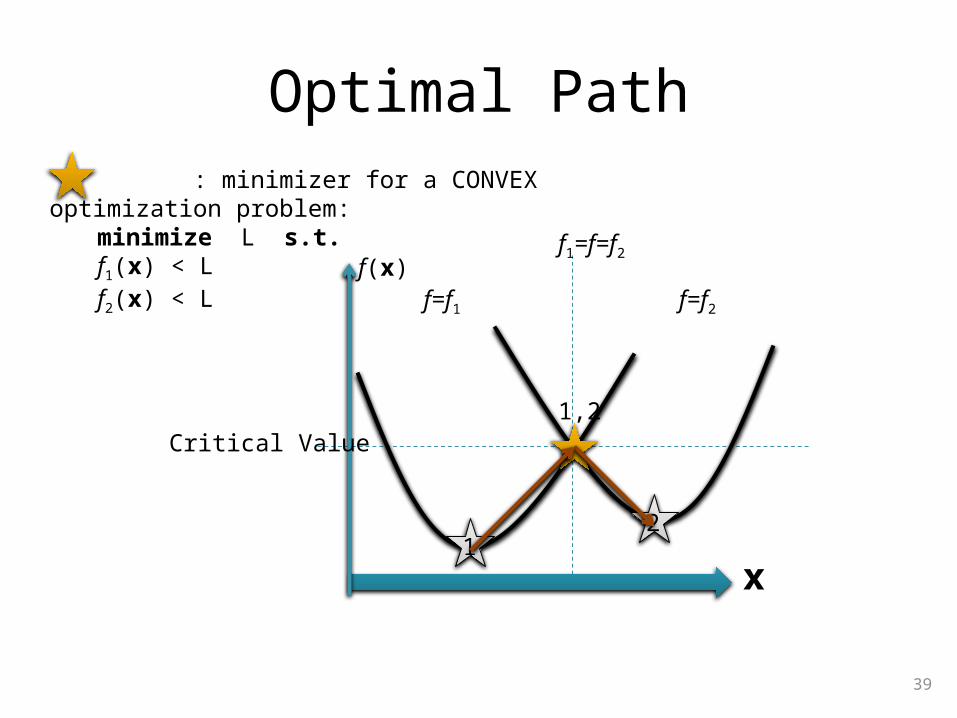
Optimal Path
1,2
21
39
x
f1=f=f2
Critical Value
f=f2f=f1
: minimizer for a CONVEX optimization problem:minimize L s.t.f1(x) < Lf2(x) < L f(x)

Critical Point
1,2
21
40
x
f1=f=f2
Critical Value
f=f2f=f1
f(x)

41
Min of Multiple Convex Functions
Min of Multiple Convex Functions
f = min(f1, f2 , f3)
f= f1
f= f2
f= f3

42
Min of Multiple Convex Functions
Min of Multiple Convex Functions
f = min(f1, f2 , f3)
f= f1
f= f2
f= f3
1,2
2,3
1,31
32
43
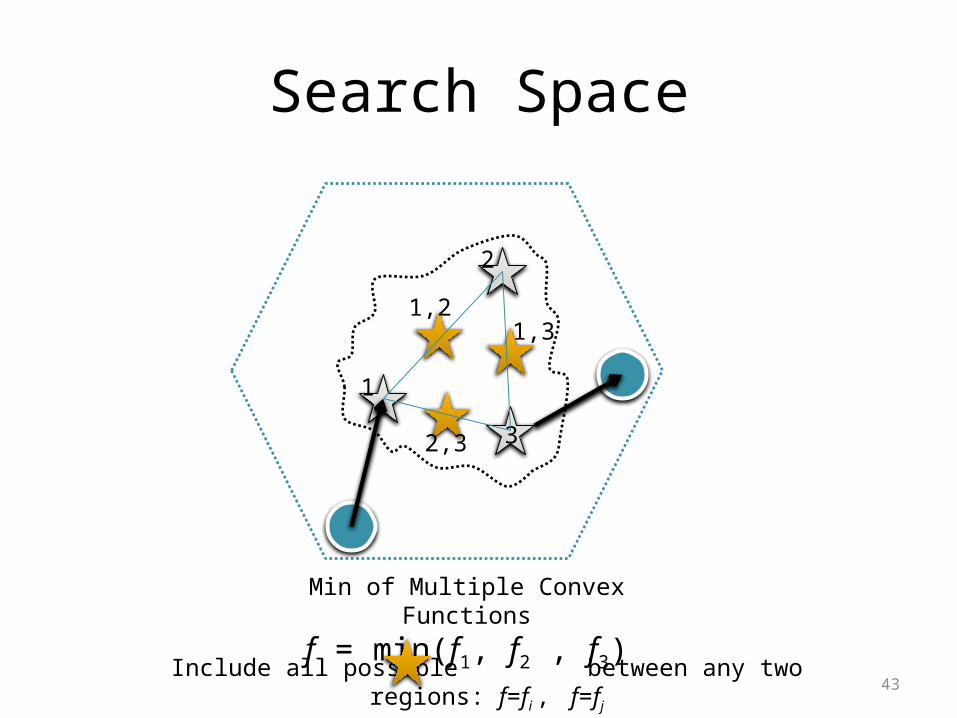
Search Space
Min of Multiple Convex Functions
f = min(f1, f2 , f3)
1,2
2
1
3
1,3
2,3
Include all possible between any two regions: f=fi , f=fj
44
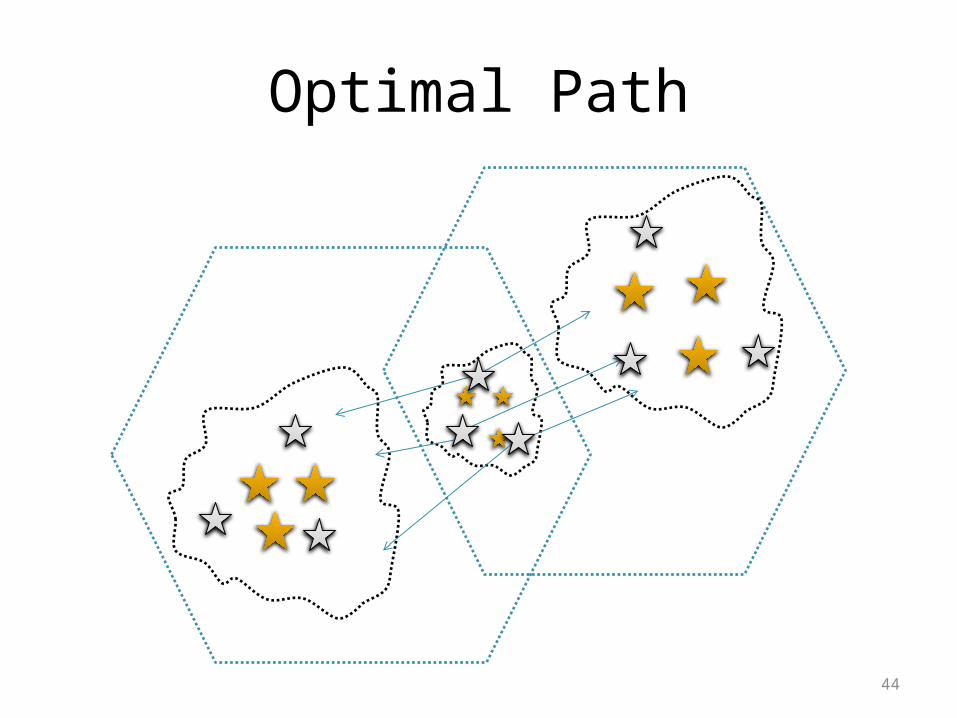
Optimal Path
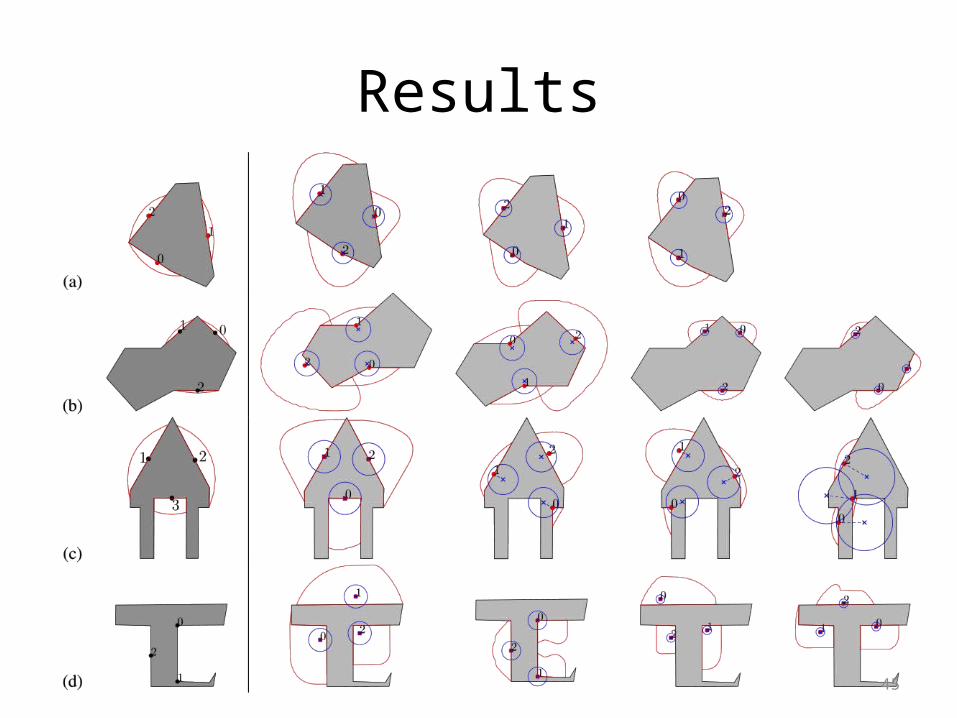
45
Results
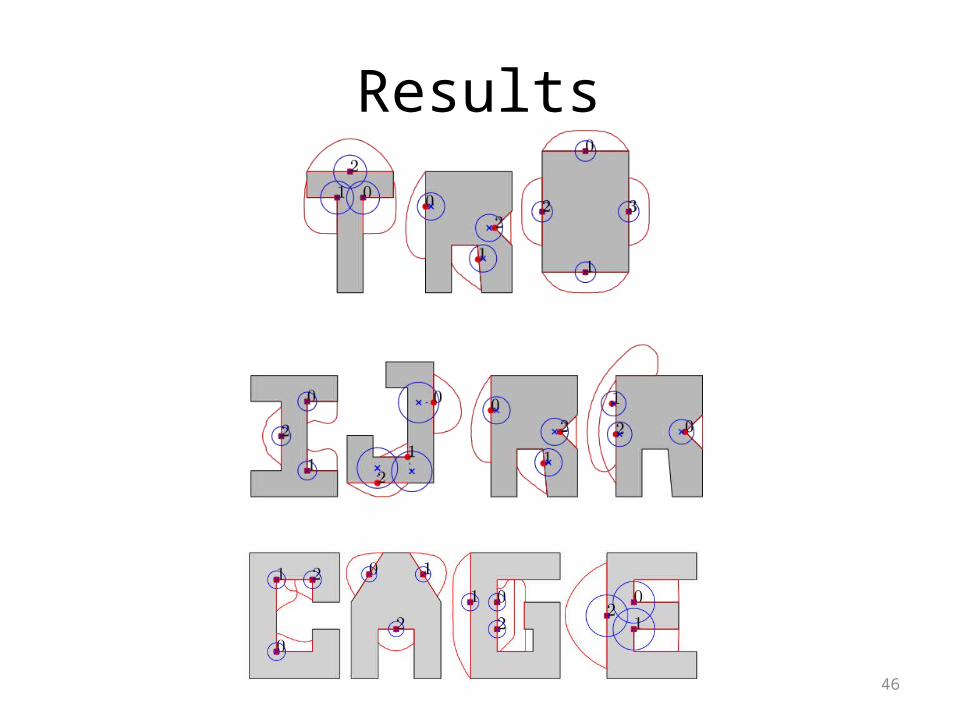
46
Results

47
Shape Uncertainty
Exact Object(Unknown) Scanned Objectsensor
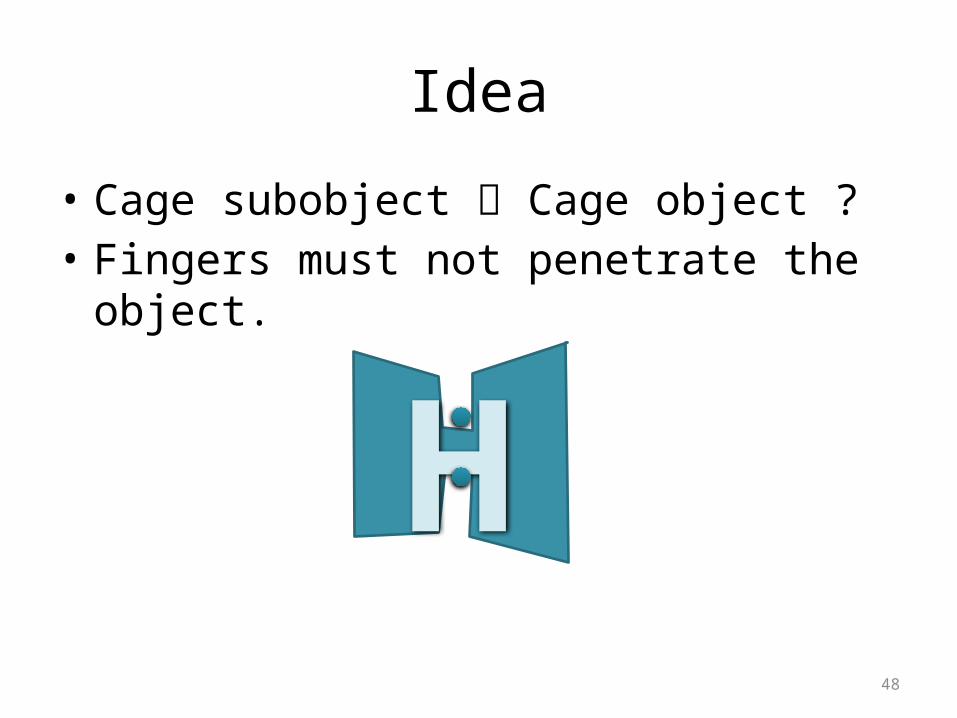
48
Idea
• Cage subobject Cage object ?• Fingers must not penetrate the object.
H
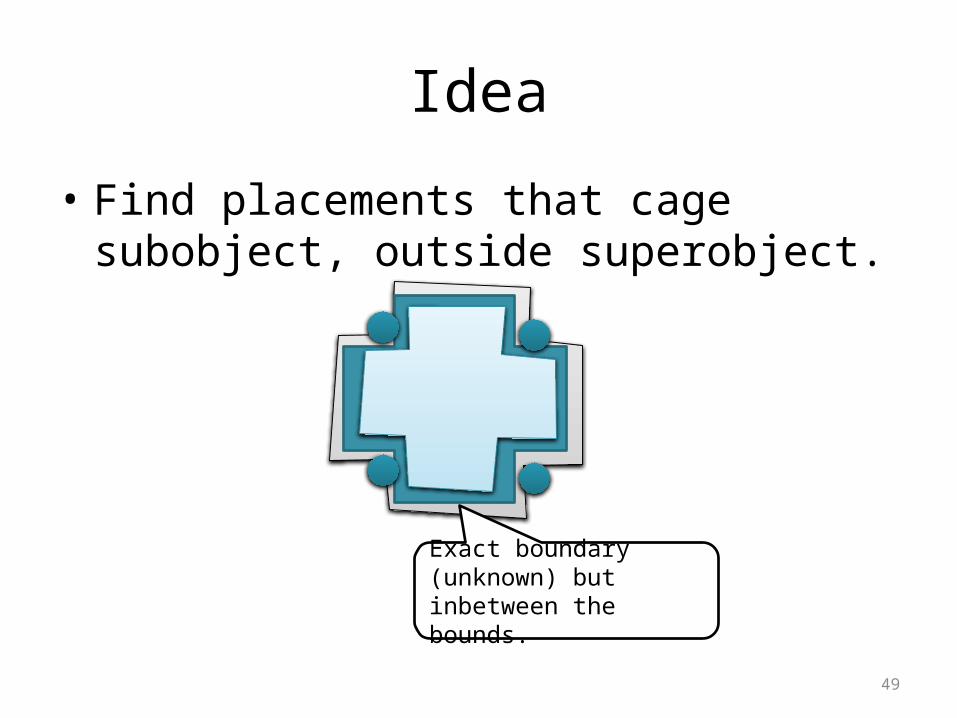
49
Exact Object(Unknown)
Idea
Exact boundary (unknown) but inbetween the bounds.
• Find placements that cage subobject, outside superobject.
50
Applications
• Simplification• Curved Surface, Spherical Fingers• Shape Uncertainty• Slightly Deformable Object• Partial Observation
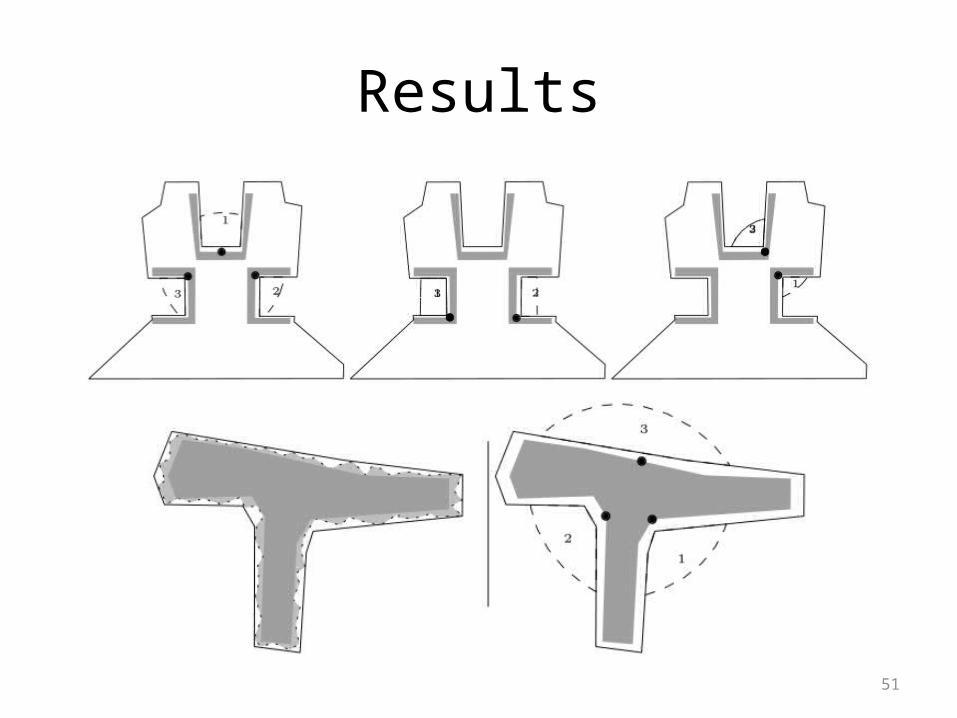
51
Results
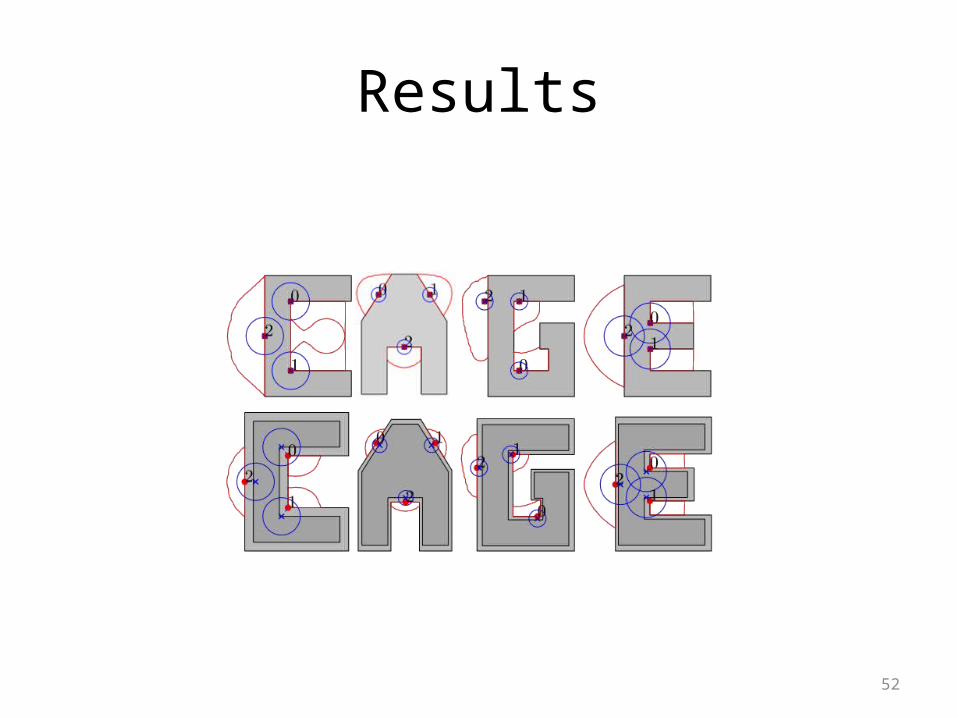
52
Results

53
Conclusion
• O(c log c) exact algorithms– Squeeze, Stretch, Squeeze & Stretch– c : # decomposed convex features
• O(cm2 log( cm2 ) ) approximate algorithm– m : # approximation facets
• Extension to three dimension.• Trade error tolerance with uncertainty.

54
Q&A
:V :o

55
Publications• Journal Papers
– Peam Pipattanasomporn, Attawith Sudsang: Two-Finger Caging of Nonconvex Polytopes. IEEE Transactions on Robotics 27 (2011)
– Thanathorn Phoka, Pawin Vongmasa, Chaichana Nilwatchararang, Peam Pipattanasomporn and Attawith Sudsang: Optimal independent contact regions for two-fingered grasping of polygon. Robotica (2011)
• Conference Papers– Peam Pipattanasomporn, Attawith Sudsang: Object caging under imperfect shape knowledge. ICRA 2010 – Thanathorn Phoka, Pawin Vongmasa, Chichana Nilwatchararang, Peam Pipattanasomporn, Attawith
Sudsang: Planning optimal independent contact regions for two-fingered force-closure grasp of a polygon. ICRA 2008
– Peam Pipattanasomporn, Pawin Vongmasa, Attawith Sudsang: Caging rigid polytopes via finger dispersion control. ICRA 2008
– Peam Pipattanasomporn, Pawin Vongmasa, Attawith Sudsang: Two-Finger Squeezing Caging of Polygonal and Polyhedral Object. ICRA 2007
– Peam Pipattanasomporn, Attawith Sudsang: Two-finger Caging of Concave Polygon. ICRA 2006 – Thanathorn Phoka, Peam Pipattanasomporn, Nattee Niparnan, Attawith Sudsang: Regrasp Planning of
Four-Fingered Hand for Parallel Grasp of a Polygonal Object. ICRA 2005







