
M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
1
CORSO DI SISTEMI DI MOVIMENTAZIONE E
STOCCAGGIO
Anno Accademico: 2010/11
Università di Pisa - Polo della Logistica di Livorno –
Corso di Laurea in Economia e Legislazione dei Sistemi
Logistici
Docente: Marino Lupi
PRESENTAZIONE CORSO

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
2
La logistica è la disciplina che ha come fine quello di ottimizzare le
procedure di acquisizione, produzione e distribuzione di beni e
servizi, , e delle relative informazioni, con l’ obiettivo fondamentale
di offrire un elevato livello di servizio ai clienti a costi contenuti.
Definizione Logistica (una delle tante)
Attualmente si tende a distinguere:
La logistica degli approvvigionamenti: essa si svolge "a monte"
degli impianti di produzione e consiste nella ottimizzazione della
gestione dei rifornimenti, di materie prime e componenti, in
funzione del piano di produzione dell'impresa.
La logistica interna è quella che si svolge all’interno degli
impianti di produzione: consiste nella ottimizzazione dei processi
di ricevimento, stoccaggio e produzione dei materiali da lavorare.

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
3
La logistica distributiva si svolge “a valle” degli impianti di
produzione e “a monte” del mercato: consiste nell’ottimizzazione
del rifornimento dei punti di vendita o della consegna diretta al
cliente finale.
In questa schematizzazione, la logistica degli approvvigionamenti e
la logistica della distribuzione sono indicate, unitamente, come
logistica esterna.
Con riferimento ai processi logistici di approvvigionamento e
distribuzione dei beni, il trasporto merci, comunemente inteso, è una
parte della logistica.

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
4
Nell’analisi dei sistemi di trasporto merci (trasporti
“esterni”) distinguiamo:
- Unità di carico
- Unità di trasporto
- Pallet
- Contenitore
- Cassa Mobile
- Semirimorchio
- Autoarticolato, autotreno
- Trasporto combinato strada-ferrovia
- Trasporto Stradale
- Trasporto Ferroviario
- Trasporto Aereo
- Trasporto Marittimo

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
5
- Unità di
movimentazione
- Carrello frontale
- Trattore a ralla
- Multitrailer
- Carrello Cavaliere (“Straddle Carrier”)
- Impilatore (“Reach stacker”)
- Gru a portale (“transtainer”)
- Gru portuale per contenitori (“ship-to-
shore gantry crane”, “Portainer”)

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
6
6
EUROPA A 27 STATI –Traffico merci - Spostamenti in Europa
Fo
nte
:E
uro
pea
nU
nio
n,
En
erg
ya
nd
Tra
nsp
ort
infigu
res
200
9,
Pa
rt3
Tra
nspo
rt,
Eu
ropean
Co
mm
isio
n.
EU27 Performance by Mode for Freight Transport
1995 - 2007
billion tonne-kilometres
0
200
400
600
800
1000
1200
1400
1600
1800
2000
2200
1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007
Road Sea Rail Inland Waterw ay Pipeline Air

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
7
EU energy consumption in thousands of tons of oil equivalent per unit of traffic (1 tonkm or 10 pkm) -source European Commission, year 2006 (source: EC)
Rail 0.019
Inland navigation 0.034
Road 0.116
Aviation 0.899
Maritime 0.004
SISTEMI DI TRASPORTO E LORO CONSUMO ENERGETICO

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
8
SISTEMI DI TRASPORTO E LORO SICUREZZA IN EUROPA
Numero di morti in incidenti nell’UE - anno 2006 (fonte Commissione Europea)
Strada 43000
Ferrovia (*) 1370
Aereo 47
Nave n.d.(*) 25 in collisioni, 7 in deragliamenti, 360 presso passaggi a livello, 953 in investimenti, 25 in altre maniere

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
9
SISTEMI DI TRASPORTO E LORO SICUREZZA IN EUROPA
Total revenue equivalent tonnkm in billions(1 eq. tonnkm = 1 tonkm or 10 pkm) by mode - source European Commission, year 2006
Numero di morti in incidenti per tonkmequivalenti percorse nell’UE, anno 2006
valore indice
Strada 2.608 16,49 2.035
Ferrovia 482 2,84 351
Aereo 58 0,81 100

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
10
L’intermodalità, ossia la combinazione ottimale dei vari modi di
trasporto nella catena del viaggio fra l’origine e la destinazione, è
considerata attualmente la soluzione per l’ottimizzazione del
trasporto merci (nell’ambito dell’Unione Europea).
Forti investimenti, in tutta Europa, per invertire, o perlomeno
arrestare, il trend di crescita della percentuale di traffico stradale:
sia per il trasporto delle merci (soprattutto), sia per il trasporto
delle persone.

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
11
INTERMODALITA’ ECONOMICA
(concetto- rappresentazione schematica)
D
Co
sto “
tutt
o s
trad
a”
Co
sto
inte
r mod
ale
Costo
O
Trasferimento
dell’unità di
carico

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
12
Contenitore : Cassa
speciale per il trasporto
merci, rinforzata,
sovrapponibile che può
essere trasbordata
orizzontalmente o
verticalmente
La cassa mobile(“swap body”) è un unità
di carico, per il trasporto
di merce, utilizzata nel
trasporto combinato
strada-ferrovia, non è
impilabile
12

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
13
Semirimorchio
su carro
ferroviario a
tasca fissa
Altre unità di carico intermodali

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
14
Semirimorchio su carro ferroviario a tasca mobile
Fo
nte
: R
uss
o F
. in
Ca
nta
rell
a(a
cu
ra d
i),
Intr
od
uzi
on
e a
lla
tec
nic
a d
ei
tra
spo
rti
e d
el t
raff
ico
, U
TE
T,2
00
1..

15
carico/scarico
scorrimento
stoccaggio
Sezione
trasversale di
un terminale
STRADA-
ROTAIA
Tre binari
operativi.
Quattro corsie
di stoccaggio
15
Corsie di
scarico/carico
e di scorrimento
esterne alle rotaie
della gru.
Fo
nte
:Da
lla
Ch
iara
B.,
Ma
rig
o D
.,B
enzo
G.,
In
terp
or t
i e
term
ina
li i
nte
rmo
da
li,
Ho
epli
,2
00
2.

16
Schema di un terminale strada-rotaia: fascio di presa e consegna; due
moduli gru (con due gru a portale ciascuno) con tre binari operativi
ciascuno, fascio di appoggio per l’attesa dei treni arrivati che devono
essere scaricati o che caricati sono in attesa di partire.
Tre binari operativi
-corsie di scorrimento
-corsie di carico/scarico
-rotaia del “transtainer”
- vie di stoccaggio
Fo
nte
:Da
lla
Ch
iara
B.,
Ma
rig
o D
.,B
enzo
G.,
In
terp
or t
i e
term
ina
li i
nte
rmo
da
li,
Ho
epli
,2
00
2.

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
17
Domanda di movimentazione:
Tonnellate annue movimentate
Numero treni
“blocco”
giornalieriNumero di unità di
carico (container,
casse mobili) da
movimentare per
giorno.
Offerta di movimentazione:
Gru per “modulo” (due nella figura della slide precedente)
Capacità di una gru a portale: 20-25 tiri/ora
Capacità di una gru frontale: circa 10 movimenti/ora

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
18
Schema di un terminal contenitori marittimo
Fo
nte
: S
ciu
tto
G.
e G
ala
ve r
na
M.
Te c
no
l og
ie d
ei
Tr a
spo
rti
e te
rrit
ori
o,
Ed
izio
ni
Sc i
ro,
20
00
.

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
19
Il modello utilizzato è il modello a coda singola con più “server”.
Coda all’ingresso di un terminal marittimo
(LATO MARE)
Navi che si servono del
terminale
Navi in attesa in rada
Banchine di accosto

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
20
Il tempo medio di “attraversamento del sistema” o di “soggiorno nel
sistema” (“sojourn time”).
Calcolo:
Il tempo medio di attesa in coda (ossia il tempo medio di attesa in
rada prima di potersi accostare alla banchina, “waiting time”).
Il valore del tempo di attesa in coda sotto il quale stanno il 90%
degli utenti.

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
21
Il modello utilizzato è di nuovo il modello a coda singola con più
“server”.
Coda all’ingresso di un terminal marittimo
(LATO TERRA)
Autotrasportatori che si
servono del terminale
Veicoli in attesa di
essere serviti
Cancelli di ingresso

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
22
Il tempo medio di “attraversamento del sistema” o di “soggiorno nel
sistema” (“sojourn time”).
Calcolo:
Il tempo medio di attesa in coda (ossia il tempo medio fra quando un
veicolo si accoda e quando inizia ad essere servito).
Il valore del tempo di attesa in coda sotto il quale stanno il 90%
degli utenti.

Nell’ambito dei sistemi di movimentazione ai terminal marittimi
devono essere menzionate delle particolari unità di movimentazione i
cosiddetti “Automated Guided Vehicle” (AGV). Gli AGV sono
veicoli a funzionamento automatico, ossia senza guidatore.
Terminali marittimi automatizzatiF
on
t e:h
ttp: /
/ww
w.g
ott
wal
d.c
om
Il primo utilizzo degli AGV per movimentare i contenitori ad un
terminal marittimo si è avuto, nel 1993, al “Delta Terminal” di
Rotterdam che è gestito dall’ “European Container Terminal” (ETC).
Vedremo che questo tipo di veicolo è stato utilizzato, e sviluppato,
prima per le movimentazioni relative alla logistica interna.

24
Gli AGV del “Delta Terminal” sono equipaggiati con un motore diesel e
trasmissione idraulica (per i veicoli più recenti è stata utilizzata la
trasmissione elettrica).
Ogni veicolo può
trasportare 1
contenitore da 40
piedi, oppure 2 da
20.
24

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
25
Layout del terminal container di Altenwerder del porto di Amburgo
(è uno dei più moderni terminali marittimi per contenitori del
mondo). E’ gestito dalla Hamburger Hafen und Logistik AG
(HHLA).
Fonte: http://www.hhla.de

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
26
Sistemi di movimentazione nella logistica
interna- Carrelli elevatori frontali
- Carrelli elevatore a forche retrattili
- Carrelli elevatori trilaterali
Tipi di carrelli
industriali
- Carrelli magazzinieri o commissionatori
Automated guided vehicle
(AGV)
- Guida ottica
- Guida magnetica
- Guida laser
- Magnet-Gyro guidance

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
27
Sistemi di movimentazione
operanti su percorsi fissi
- Sistemi non motorizzati
- Sistemi motorizzati
- Sistemi
motorizzati
- Dispositivi di movimentazione fissi
- Dispositivi di movimentazione mobili, ma vincolati
- Dispositivi di movimentazione mobili e svincolabili

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
28
Sistemi di stoccaggio delle unità di carico nei
magazzini
Tipologia
di
stoccaggio
delle unità
di carico
Sovrapposizione diretta delle u.c.
(catasta)
Scaffalature
Scaffalature bifronti di tipo
tradizionale
Scaffalature dinamiche a
gravità.
Scaffalature mobili ad alto
indice di utilizzazione
volumetrica.
Scaffalature automatizzate
dotate di trasloelevatori.
Scaffalature drive-in (drive-
through)
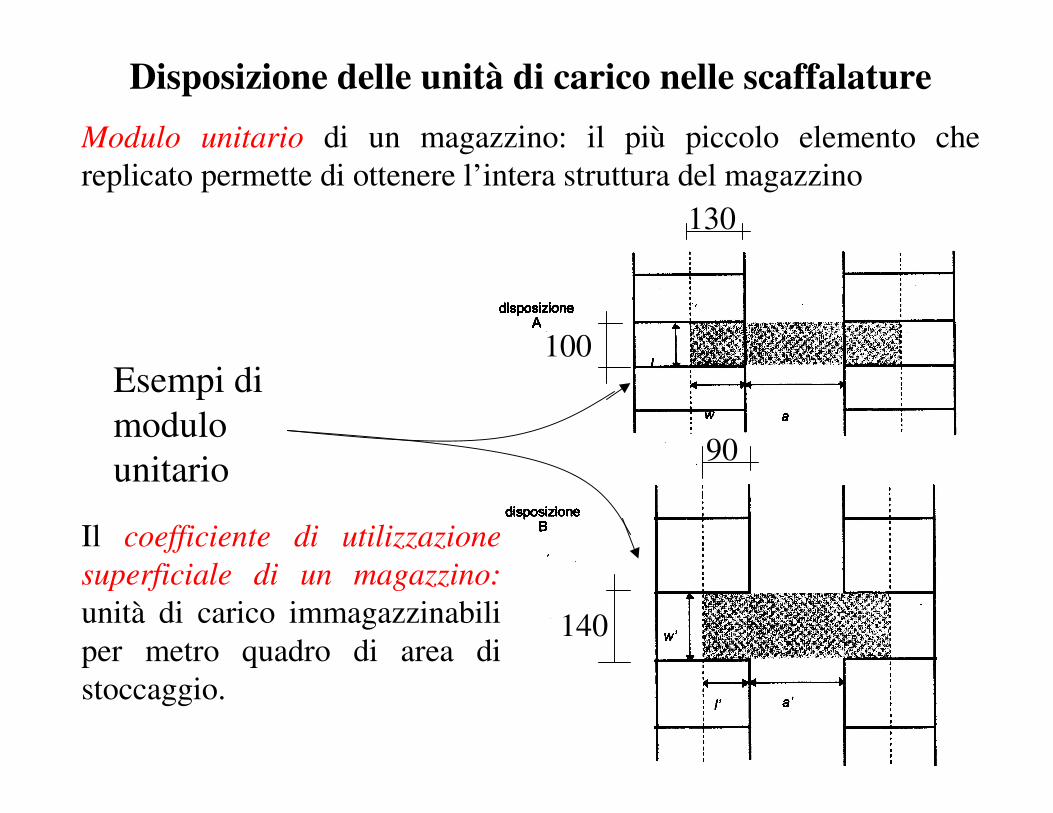
Disposizione delle unità di carico nelle scaffalature
Esempi di
modulo
unitario
100
130
90
140
Modulo unitario di un magazzino: il più piccolo elemento che
replicato permette di ottenere l’intera struttura del magazzino
Il coefficiente di utilizzazione
superficiale di un magazzino:
unità di carico immagazzinabili
per metro quadro di area di
stoccaggio.

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
30
I tempi fissi sono quei tempi, uguali per
tutti i cicli, che sono indipendenti dalla
localizzazione del vano.
I tempi variabili sono quelli che invece
dipendono dalla localizzazione del
vano.
Unità di movimentazione in un magazzino: tempi di
ciclo e potenzialità di movimentazione
Tempo di ciclo semplice = tempo fisso + tempo variabile
di un unità di movimentazione

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
31
punta
sempliceciclo
m ct
C×
×=
2
36008
“Troughput”
Capacità di
movimentazione di
un’unità di carico in un
magazzino (si esprime
generalmente in termini
giornalieri)

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
32
“Layout” ottimale di un magazzino
Il problema che ci si pone è
quello di determinare il “layout”
ottimale di un magazzino: in
modo da ridurre il tempo medio
di movimentazione delle unità di
carico.
In base al calcolo, e alla posizione del punto di input-output, risulta
che il rapporto ottimale delle due misure è:2
UV =

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
33
Dimensionamento di un magazzino per lo stoccaggio di
unità di carico pallettizzate.
Dati:
- Potenzialità ricettiva richiesta (n. di pallet da stoccare)
- Dimensioni delle unità di carico pallettizzate
- Movimentazione massima giornaliera di unità di
carico richiesta (“troughput”, ossia immissioni +
prelievi)
Determinare:
- Unità di movimentazione da utilizzare
- Superficie del Magazzino, sue dimensioni, numero
di corridoi
- La capacità di movimentazione “offerta” deve
essere superiore alla “domanda” di movimentazione

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
34
Fo
nte
:Ca
ron
F.,
Ma
rch
etG
. e
We
gne
rR
.”Im
pia
nti d
i
mo
vim
en
tazi
on
e e
sto
ccag
gio
de
i m
ate
riali”
,H
oe
pli,
19
97
.
Magazzini automatizzati serviti da trasloelevatori
I criteri di progettazione di
questi magazzini, costituiti da
sistemi di stoccaggio basati su
scaffalature bifronti
automatizzate, sono simili a
quelli visti per i magazzini
tradizionali serviti da carrelli a
forche. Nel senso che, per
esempio, anche in questo caso il
calcolo della capacità di
movimentazione si basa sui
tempi di ciclo delle varie
operazioni, distinguendo la parte
variabile da quella fissa.
Inoltre bisogna avere presente
che questi magazzini hanno uno
sviluppo in altezza notevole

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
35
Capacità di movimentazione di un trasloelevatore
Al fine della determinazione della capacità di movimentazione di
un trasloelevatore sono stati individuati due vani che sono
rappresentativi di tutta la scaffalatura.
I punti rappresentativi della scaffalatura hanno le seguenti coordinate
51
LX P = OIP HHy /
3
1
3
21
+=
LX P3
22
= OIP HHy /3
1
5
12
+=

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
36
9,0semplice ciclo di tempo 2
3600×
×
=oraria
semplicicicliC
“throughput”Coefficiente di riduzione che
tiene conto di fenomeni di punta
Capacità (potenzialità) del trasloelevatore si esprime, generalmente
in termini orari:

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
37
Dimensionamento di un magazzino automatico dotato
di traloelevatori.
Dati:
- Potenzialità ricettiva richiesta (n. di pallet da stoccare)
- Dimensioni delle unità di carco pallettizzate
- Movimentazione massima oraria di unità di
carico richiesta (“troughput”, ossia immissioni +
prelievi)
Determinare:
- Dimensioni del magazzino, numero di corridoi
e dei trasloelevatori
- La capacità di movimentazione “offerta”
deve essere superiore alla domanda di
movimentazione

M.Lupi,"Sistemi di Movimentazione e Stoccaggio", A.A. 2010-11, Univ.di Pisa, Polo della Logistica di Livorno
38
Le diapositive che vengono illustrate a lezione sono messe a disposizione degli studenti sul sito: http://www2.ing.unipi.it/~a006048/







