
Deep Space Exploration Robotics for Improved Capability,
Utilization, and Flexibility on a Cislunar Habitat
D a n i e l R e y ( C S A )
P a u l F u l f o r d ( M D A )
© Government of Canada, 2018
FISO Presentation - May 30, 2018

Preparing a possible role for Canada in Deep Space Exploration (1)
© Government of Canada, 2018 2Image Credit: NASA
• The CSA is working with other agencies to define the next steps for human spaceflight exploration Publication of the Global Exploration Roadmap
(2011, 2013 and 2018) With the ISS partners, defining the
architecture of the Lunar Orbital Platform –Gateway
• In 2016, the Canadian Government tasked the CSA to prepare Options for Post-ISS Human Spaceflight Exploration for Canada. Current activities related to space robotics are: MSS Autonomous Control (2017) DSXR Phase 0 (2017) – this presentation System for Execution and Planning in Apogy
(2017) Low Profile End Effector and Fixture (2018) Dexterous Interface and Tools for Planetary
and Deep Space (2018)

Preparing a possible role for Canada in Deep Space Exploration (2)
Over the last decade, the Canadian Space Agency (CSA) has conducted many studies and prototyping activities to prepare Canada for Deep-Space Exploration. In particular, for space robotics:• Robotic Architecture
Robotics and Automation for Orion (2008) Robotic Orion/Orbital Service Module (2009) Next Generation Canadarm (2009-2012) Deep Space Exploration Robotics (DSXR) (2014) DSXR Pre-Phase 0 (2016) Manipulator Interface Plate System (MIPS) (2017)
• Advanced Autonomy ISS Artificial Vision Unit (AVU) Repurposing Assessment (2012) ISS MSS Autonomous Control Assessment (2012) System of Autonomous Planning and Intelligent ExecutioN Technologies
(SAPIENT) (2013) ISS MSS Application Computer (MAC) Prototype (2015)
© Government of Canada, 2018 3

Evolution of the Canadarms
4© Government of Canada, 2018
Canadarm (SRMS) Canadarm2 (SSRMS)& Dextre (SPDM)
Canadarm3 (DSXR)& eXploration Dexterous Arm
Year 1981 (30 years) 2001 (ongoing) 2024 (proposed)
Length 15 m 17 m 8.5 m
Operator US Jointly operated by Canada and US
Proposed operations by Canada
Control Tele-operated Tele-operated and ground control
Autonomous planning and operations
Current TRL 9 9 3-4
Arm repair On Earth In space replacement units with EVA.
In space replacement units & internal repair. No EVA.
Key New Features
Capture of spacecraft; assembly and maintenance; human-robot operations.
Self-relocatable; accurate motion; active compliance; 2 small arms (Dextre) for fine tasks.
Self-deployable; single arm for large and fine tasks; situational awareness; collaboration; autonomy.
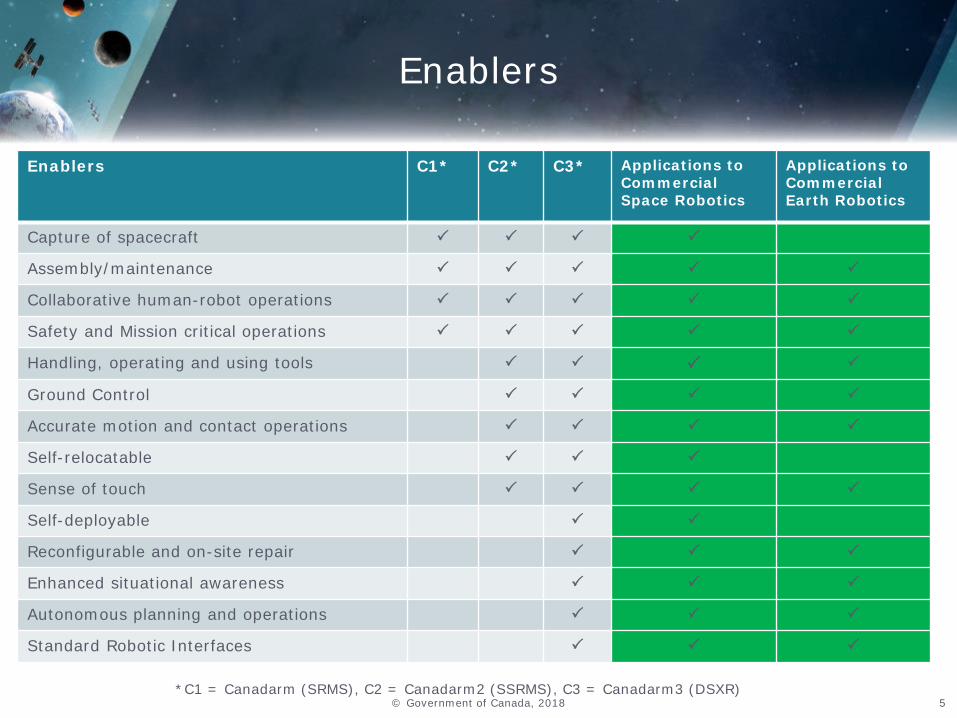
Enablers
5
Enablers C1* C2* C3* Applications to CommercialSpace Robotics
Applications to CommercialEarth Robotics
Capture of spacecraft
Assembly/maintenance
Collaborative human-robot operations
Safety and Mission critical operations
Handling, operating and using tools
Ground Control
Accurate motion and contact operations
Self-relocatable
Sense of touch
Self-deployable
Reconfigurable and on-site repair
Enhanced situational awareness
Autonomous planning and operations
Standard Robotic Interfaces
*C1 = Canadarm (SRMS), C2 = Canadarm2 (SSRMS), C3 = Canadarm3 (DSXR)© Government of Canada, 2018

Deep Space Exploration Robotics
© Government of Canada, 2018
Robotics and autonomy are essential ‘building blocks’ or capabilities whose purpose and application can evolve with the mission in order to enable mission success and maximize the outcomes of such a great pursuit

DSXR Capabilities
7
Assembly and Reconfiguration
Inspection
Maintenance & Repair
EVA Support
Science PayloadsImage Credits: NASA
© Government of Canada, 2018

DSXR Overview
8© Government of Canada, 2018
Free-FlyerGrappleFixture(FFGF)
Free-Flyer Capture Tool
eXploration DexterousArm (XDA)
DexterousAdaptor Tool
Tool & Payload Caddy
Habitat Low-Profile Grapple Fixture (LPGF)
Dexterous Grapple Fixture (DGF)
eXploration Large Arm (XLA)
Lunar Sample Tool
External Science Platform
Large ORU Interface
Standardized Robotic Interfaces
Small ORU Interfaces
Small ORU Interface with Fluid Transfer
XDAAdaptor

Inspection, Repair & Logistics
© Government of Canada, 2018
DSXR provides the capability to inspect all exterior surface and to service external equipment via replacement and/or transfer to the
equipment airlock for delivery to the IVA environment for crew repair

Off Nominal is the New Nominal
• Historically space robotics and inspection have played critical roles to mission success Inspection provides critical insight
to support anomaly resolution
• Shuttle program relied on the robotic arm to deal with off-nominal or contingency issues in 44% of its 91 missions
© Government of Canada, 2018 10
This data was derived by MDA using NASA's Greenbook Data for the Shuttle Remote Manipulator System (SRMS) and originally
published in IAC-07-B31.2.07.
Inspection #1
contingency capability
Photo Credit: NASA
Robotic inspection of shuttle tiles & wing
leading edges
Robotic Contingency Ops on Shuttle

Improved Crew Safety & DSG Availability
• Robotics offers mission planners the ability to reduce crew exposure to the space environment by providing an alternative to EVA “First look” inspection Replacement of robotically
compatible equipment
• Enables maintenance during untended periods for continued availability
11
Image Credit: NASA
© Government of Canada, 2018
SRMS used to assist with restowage of SIR-B antenna on STS-41G
In 2016 Dextre used to replace aging ISS Batteries

Self Repair
© Government of Canada, 2018
DSXR provides self maintenance capabilities to eliminate or reduce the demand for EVA support
Image Credit: NASA
Image Credit: CSA

Capture, Berthing & Reconfiguration
© Government of Canada, 2018
DSXR provides the capability to berth/unberth visiting vehicles as well as relocate modules on the DSG for improved mission flexibility

Free Flyer Capture
• The robotic capture of visiting vehicles can offer benefits to the mission and alternate or backup capability to docking
Reduces the collision between vehicles, resulting in lower loads/accelerations imparted to the station
Provides opportunity to reduce docking system mass via removal of elements not necessary for berthing, freeing up mass for more logistics
© Government of Canada, 2018 14
Image Credit: NASA

Benefits of Berthing/Unberthing
© Government of Canada, 2018 15
• The capture, berthing and relocation of modules/vehicles enables in-space re-planning and reconfiguration: Ensures physical connection is
retained in the stack during re-arrangement
Robotic rearrangement of modules does not utilize consumable propellant
Berthing interfaces on ISS are wider in diameter than docking interfaces, allowing larger items to be transferred between modules
Image Credit: NASA
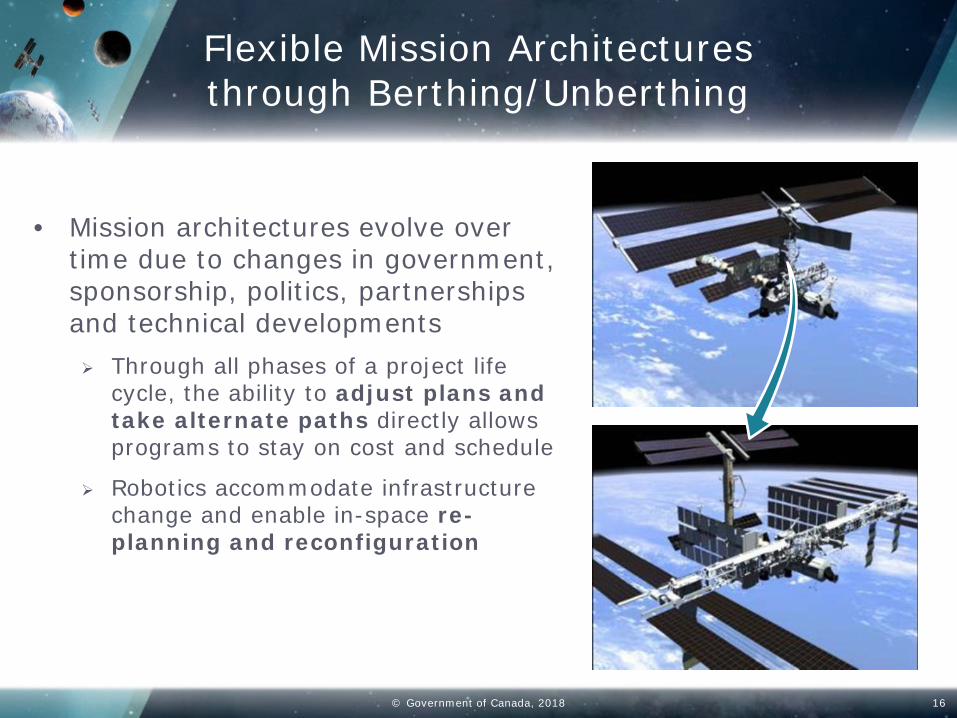
Flexible Mission Architectures through Berthing/Unberthing
© Government of Canada, 2018 16
• Mission architectures evolve over time due to changes in government, sponsorship, politics, partnerships and technical developments Through all phases of a project life
cycle, the ability to adjust plans and take alternate paths directly allows programs to stay on cost and schedule
Robotics accommodate infrastructure change and enable in-space re-planning and reconfiguration

EVA Support
© Government of Canada, 2018
The DSXR supports contingency EVA operations

EVA Operations
• Shuttle and ISS robotics have provided decades of examples showing the benefits of human/robotic collaboration during EVA: Robotics provides an EVA work
platform with extended reach and mobility to areas otherwise not accessible via handrails and tether points
Mobility aid that result in a reduction in EVA timelines via efficient transfer of crew
18
Image Credit: NASA
Robotic/EVA Repair of ISS Solar Array
© Government of Canada, 2018
Use of Robotics to Support Shuttle EVA

EVA Operations
Robotics offers improved crew efficiency by freeing hands for performing tasks instead of stability
19
Image Credits: NASA
© Government of Canada, 2018

Support to Science
© Government of Canada, 2018
Image Credit: NASA
DSXR enables the robotic hosting, deployment, and maintenance of science payloads on the Habitat

Science Support
• The Deep Space Gateway can serve as an important platform for deploying small hosted missions to the Moon using DSXR and a small satellite deployer system
• Science Payloads can be hosted on external science platforms services by DSXR
© Government of Canada, 2018 21
Image Credit: SSL
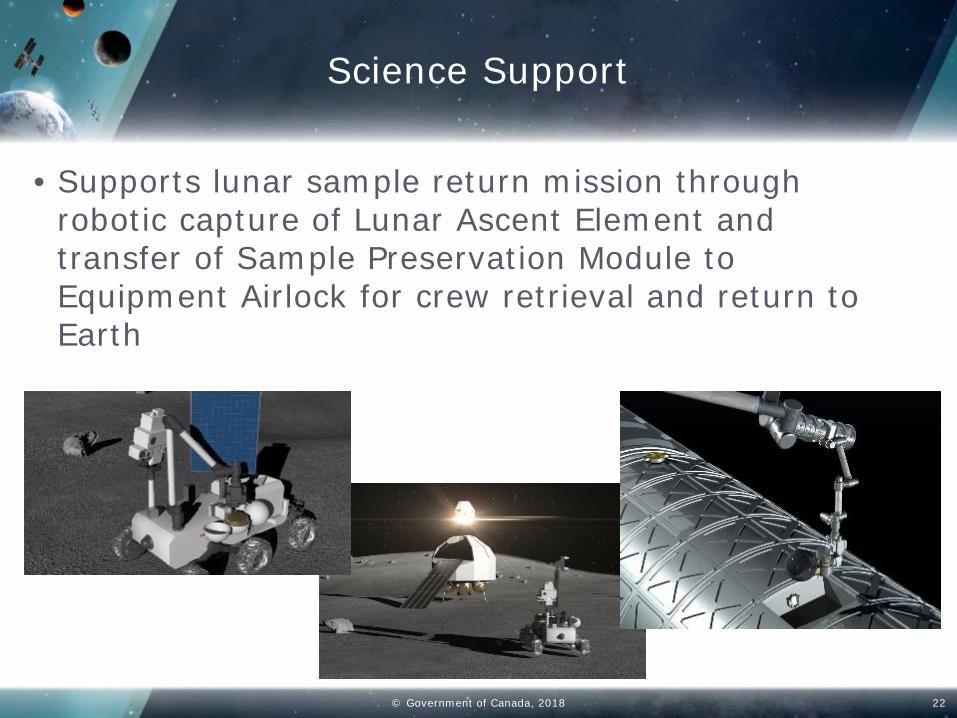
Science Support
• Supports lunar sample return mission through robotic capture of Lunar Ascent Element and transfer of Sample Preservation Module to Equipment Airlock for crew retrieval and return to Earth
© Government of Canada, 2018 22

Intravehicular Robotics
© Government of Canada, 2018
Employing the smaller dexterous arm for EVR and IVR as well as other purpose built robotics show potential benefits for Gateway utilization
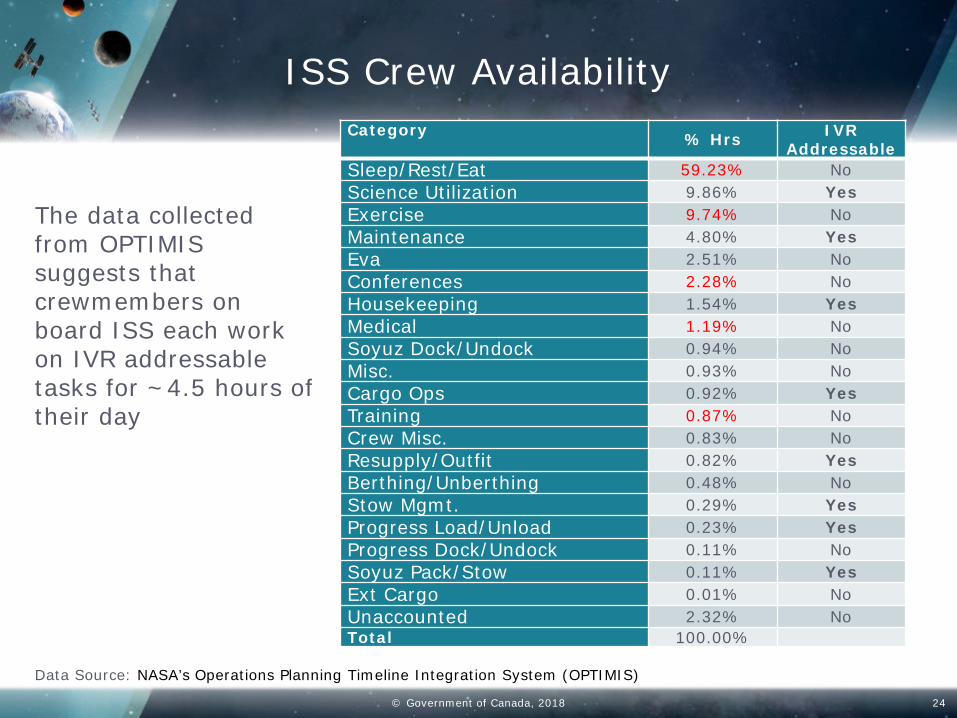
ISS Crew Availability
© Government of Canada, 2018 24
Data Source: NASA’s Operations Planning Timeline Integration System (OPTIMIS)
Category % Hrs IVR Addressable
Sleep/Rest/Eat 59.23% NoScience Utilization 9.86% YesExercise 9.74% NoMaintenance 4.80% YesEva 2.51% NoConferences 2.28% NoHousekeeping 1.54% YesMedical 1.19% NoSoyuz Dock/Undock 0.94% NoMisc. 0.93% NoCargo Ops 0.92% YesTraining 0.87% NoCrew Misc. 0.83% NoResupply/Outfit 0.82% YesBerthing/Unberthing 0.48% NoStow Mgmt. 0.29% YesProgress Load/Unload 0.23% YesProgress Dock/Undock 0.11% NoSoyuz Pack/Stow 0.11% YesExt Cargo 0.01% NoUnaccounted 2.32% NoTotal 100.00%
The data collected from OPTIMIS suggests that crewmembers on board ISS each work on IVR addressable tasks for ~4.5 hours of their day

Intravehicular Robotics Opportunities
25
# Task Description1 Logistics
HandlingTransfer of Cargo Transfer Bags (CTBs) and Middeck lockers(MDLs)
2 MonitoringVisual InspectionInventory
Environmental monitoring, Photography, Video. Inventory scans
3 Housekeeping Weekly housekeeping tasks
4 Science Experiments where crew assist with loading/unloading of samples
5 Maintenance Repeatable maintenance operations.
6 Technology Demonstrations
Autonomy, path planning, fault recovery, task planning, mobility operations
7 Unplanned Collaborative Robotics
Teach new robotics handling routines
8 Telerobotic medicine
Telerobotic medicine demonstrations. Future capability for deep space.
9 ORU RepairDexterous Glovebox
Small-scale repairs at the circuit card assembly (CCA) level by removing and replacing shop-replaceable units (SRUs).
Image Credits: NASA
© Government of Canada, 2018

Collaborative Tele-robotics
© Government of Canada, 2018 26
Canadarm spin-offs to terrestrial collaborative robotic technology offers spin-in capabilities for DSXR such as collaboration with crew – a third hand or dexterous repair
Image Credit: Synaptive Medical
Image Credit: University of Calgary

Planning, Perception & Autonomy
© Government of Canada, 2018
Advanced Situational Awareness and Automated Mission Planning & Execution Tools for Increased Ease of Use and Efficiency

Mission Utility and Productivity
• Variable autonomy of robotics can effectively support LOS and latent signals by way of parsing high level commands in situ
• Commands can be issued at an activity level versus at an arm level or actuator level (similar to auto-pilot) alleviate crew time for planning, training and execution and ultimately reducing complexity
28
Dextre command and control is performed from the ground 100% of the time with safety features in place to address latency and LOS
Image Credit: NASA
© Government of Canada, 2018

Self Reliance for Path to Mars
• Earth independent operations will demand capacity for crew to inspect and repair systems versus bringing redundant/replaceable units, requires Multi-purpose tools to support crew In-situ repairable systems which
exploit commonality
• Crew self-reliance features also include Situational awareness and
management of external assets Built-in planning and training
capability Ease of use
29
Image Credit: NASA
© Government of Canada, 2018
Conclusions
• Robotic manipulator systems are essential enablers for long duration outposts addressing critical needs: planned - science support, inspection, expected - reconfiguration, assembly, EVA support, maintenance, repair,
and unforeseen needs!
• Advances in self-deployment, self-maintenance, standard interfaces, situational awareness, and autonomy will provide efficient and necessary capabilities to cislunar missions and beyond - including Mars and future destinations.
• Building on ISS heritage, Canada has been actively developing essential technologies for deep space exploration through collaboration with International Partners.
• DSXR can be expanded and leveraged to achieve new capabilities for human exploration and commercial activities.
© Government of Canada, 2018 30








