Download - Face Recognition

Face Recognition
Ying [email protected]
Electrical and Computer EngineeringNorthwestern University, Evanston, IL
http://www.ece.northwestern.edu/~yingwu

Recognizing Faces?
Lighting
View

Outline
Bayesian Classification Principal Component Analysis (PCA) Fisher Linear Discriminant Analysis (LDA) Independent Component Analysis (ICA)

Bayesian Classification
Classifier & Discriminant Function Discriminant Function for Gaussian Bayesian Learning and Estimation

Classifier & Discriminant Function
Discriminant function gi(x) i=1,…,C Classifier
Example
Decision boundary
ij )()( if xgxgx jii
)(ln)|(ln)(
)(|)|()(
)|()(
iii
iii
ii
pxpxg
pxpxg
xpxg
The choice of D-function is not unique

Multivariate Gaussian
),(~)( Nxp
principal axes
The principal axes (the direction) are given by the eigenvectors of ;
The length of the axes (the uncertainty) is given by the eigenvalues of
x1
x2
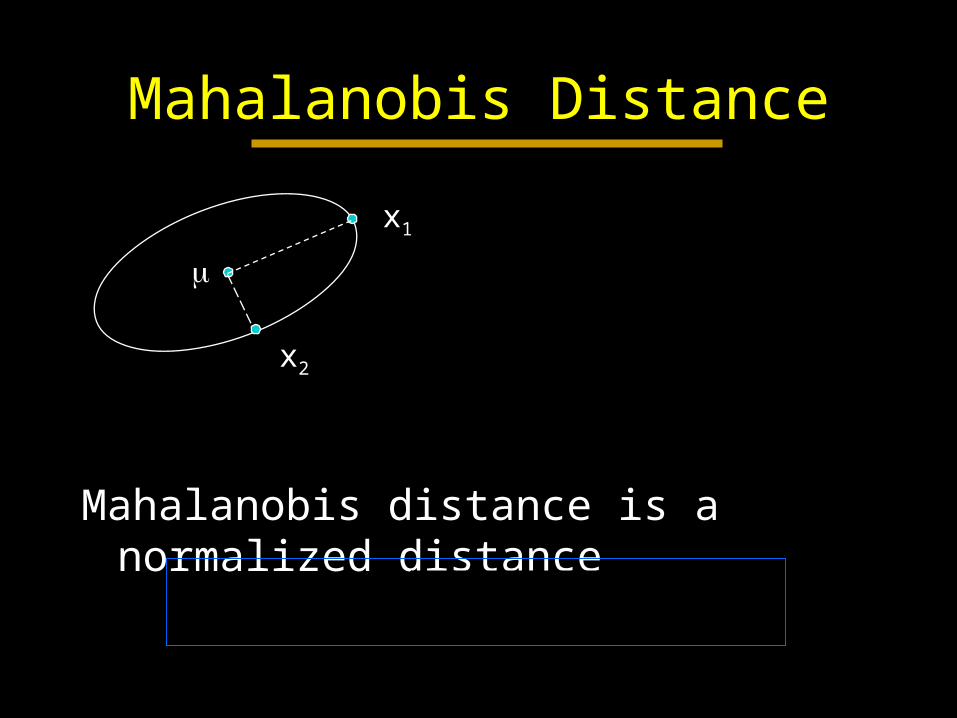
Mahalanobis Distance
Mahalanobis distance is a normalized distance
x1
x2
2221 |||||||| xx
MM xx |||||||| 21
)()(|||| 1 xxcx TM

Whitening Whitening:
– Find a linear transformation (rotation and scaling) such that the covariance becomes an identity matrix (i.e., the uncertainty for each component is the same)
y1
y2
x1
x2
y=ATx
p(x) ~ N(, ) p(y) ~ N(AT, ATA)
UUUA TT
e wher :solution 2
1

Disc. Func. for Gaussian
Minimum-error-rate classifier
)(ln||ln2
12ln
2)()(
2
1)(
)(ln)|(ln)(
1iiii
Tii
iii
pd
xxxg
pxpxg

Case I: i = 2I
)(ln22
1)(ln
2
||||)(
22
2
iTi
Ti
Ti
ii pxxxp
xxg
0
22)(ln
2
11)(
iT
i
iTi
T
ii
WxW
pxxg
constant
Liner discriminant function
Boundary:
)(ln)(
where0)( )(
)()(
||||21
0
0
2
2
jipp
ji
ji
Tji
j
i
jix
W
xxWgxg

Example
Assume p(i)=p(j)
i
j
Let’s derive the decision boundary:
02
)(
jiT
ji x

Case II: i= )(ln)()()( 1
21
iiT
ii pxxxg
0
1211 ))(ln()()(
iT
i
iiTi
Tii
WxW
pxxg
)())(
)(ln)(ln)(
2
1
)(
where0)(
10
1
0
jiji
Tji
jiji
ji
T
ppx
W
xxW
The decision boundary is still linear:

Case III: i= arbitrary
)(ln||ln
where)(
211
21
0
1
121
0
iiiiTii
iii
ii
iT
iiT
i
pW
W
A
WxWxAxxg
The decision boundary is no longer linear, but hyperquadrics!

Bayesian Learning
Learning means “training” i.e., estimating some unknowns from
“training data” WHY?
– It is very difficult to specify these unknowns– Hopefully, these unknowns can be recovered
from examples collected.

Maximum Likelihood Estimation
Collected examples D={x1,x2,…,xn}
Estimate unknown parameters in the sense that the data likelihood is maximized
Likelihood Log Likelihood
ML estimation
n
kkxpDp
1
)|()|(
)|(maxarg)|(maxarg*
DLDp
n
kkxpDpL
1
)|(ln)|(ln)(

Case I: unknown
)()(|]|)2ln[()|(ln 121
21
kT
kd
k xxxp
n
kk
n
kk
kk
xn
x
xxp
11
1
1
1ˆ 0)ˆ(
)()|((ln

Case II: unknown and 22
21
21 let )(2ln),|(ln kk xxp
2
2
2
)(
2
1),|(ln
)(1),|(ln
kk
kk
xxp
xxp
0ˆ
)ˆ(ˆ1
0)ˆ(ˆ1
12
2
1
1
n
k
kn
k
k
n
k
x
x
n
kk
n
kk
xn
xn
1
222
1
)ˆ(1ˆˆ
1ˆ
Tk
n
kk
n
kk
xxn
xn
)ˆ()ˆ(1ˆ
1ˆ
1
1
generalize

Bayesian Estimation
Collected examples D={x1,x2,…,xn}, drawn independently from a fixed but unknown distribution p(x)
Bayesian learning is to use D to determine p(x|D), i.e., to learn a p.d.f.
p(x) is unknown, but has a parametric form with parameters ~ p()
Difference from ML: in Bayesian learning, is not a value, but a random variable and we need to recover the distribution of , rather than a single value.

Bayesian Estimation
This is obvious from the total probability rule, i.e., p(x|D) is a weighted average over all
If p( |D) peaks very sharply about some value *, then p(x|D) ~ p(x| *)
dDpxpdDxpDxp )|()|()|,()|(

The Univariate Case
assume is the only unknown, p(x|)~N(, 2) is a r.v., assuming a prior p() ~ N(0, 0
2), i.e., 0 is the best guess of , and 0 is the uncertainty of it.
),(~)( ),,(~)|( where
)()|()()|()|(
20
2
1
ok
n
kk
NpNxp
pxppDpDp
kk
n xDp
)(2(exp)|( 2
0222
12121
P(|D) is also a Gaussian for any # of training examples

The Univariate Case
220
2202
0220
2
220
20
n
2
ˆ
have we
),(~)|(let weif
n
nn
n
NDp
n
n
nn
The best guess for after observing n examples
n measures the uncertainty of this guess after observing n examples
n=1
n=5
n=10
n=30
p(|x1,…,xn) p(|D) becomes more and more sharply peaked when observing more and more examples, i.e., the uncertainty decreases.
nn
22

The Multivariate Case
),(~)( ),(~)|( 00 NpNxp
n
kkn
nnn
nnnnn
nn
xn
NDp
1
11100
011
0111
00
1ˆ where
)(
ˆ)(ˆ)(
have we),,(~)|(let
),(~)|()|()|( and nnNdDpxpDxp

PCA and Eigenface
Principal Component Analysis (PCA) Eigenface for Face Recognition

PCA: motivation
Pattern vectors are generally confined within some low-dimensional subspaces
Recall the basic idea of the Fourier transform– A signal is (de)composed of a linear combination
of a set of basis signal with different frequencies.

PCA: idea
emx
222
1
21
||||)(2||||
||)(||),,...,(
mxmxee
xemeJ
kkT
kk
n
kkkn
)( 0)(22 mxemxeJ
kT
kkT
kk
m
e x
xk

PCA
2
2
222
||||
||||))((
||||2)(
mxeSe
mxemxmxe
mxeJ
k
kT
kkT
kkk
1|||| s.t. maxarg)(minarg eSeeeJ T
ee
)1(maxarg* eeSeee TT
e
1 i.e., ,0 SeeeSe TTo maximize eTSe, we need to select max

Algorithm
Learning the principal components from {x1, x2, …, xn}
] ..., , [ (5)
u and sorting )4(
ion decomposit eigenvalue )3(
))(( (2)
] ..., ,[ ,1
)1(
21
i
1
11
Tm
TTT
i
T
Tn
k
Tkk
n
n
kk
uu,u P
UUS
AAmxmxS
mxmxAxn
m

PCA for Face Recognition
Training data D={x1, …, xM}– Dimension (stacking the pixels together to make a vector
of dimension N)
– Preprocessing cropping normalization
These faces should lie in a “face” subspace Questions:
– What is the dimension of this subspace?
– How to identify this subspace?
– How to use it for recognition?

Eigenface
The EigenFace approach: M. Turk and A. Pentland, 1992

An Issue
In general, N >> M However, S, the covariance matrix, is NxN! Difficulties:
– S is ill-conditioned. Rank(S)<<N– The computation of the eigenvalue decomposition
of S is expensive when N is large Solution?
Solution I: Let’s do eigenvalue decomposition on ATA,
which is a MxM matrix ATAv=v AATAv= Av To see is clearly! (AAT) (Av)= (Av) i.e., if v is an eigenvector of ATA, then Av
is the eigenvector of AAT corresponding to the same eigenvalue!
Note: of course, you need to normalize Av to make it a unit vector

Solution II:
You can simply use SVD (singular value decomposition)
A = [x1-m, …, xM-m]
A = UVT
– A: NxM– U: NxM UTU=I : MxM diagonal – V: MxM VTV=VVT=I

Fisher Linear Discrimination
LDA PCA+LDA for Face Recognition

When does PCA fail?
PCA

Linear Discriminant Analysis
Finding an optimal linear mapping WFinding an optimal linear mapping W
Catches major difference between classes and Catches major difference between classes and discount irrelevant factorsdiscount irrelevant factors
In the mapped space, data are clusteredIn the mapped space, data are clustered

Within/between class scatters
2211
1
22
11
1
21
~ ,1~
:nsformlinear tra the
1 ,
1
mWmmWxWn
m
xWy
xn
mxn
m
T
Dx
TT
T
DxDx
TB
W
T
Yy
T
Yy
Dx
T
Dx
T
mmmmS
SSS
WSWmySWSWmyS
mxmxSmxmxS
))(( :scatter classbetween
:scatter classwithin
)~(~
,)~(~
))(( ,))((
2121
21
22
2212
11
222111
21
21

Fisher LDA
WSW
WSW
WSSW
WmmmmW
SS
mmWJ
WT
BT
T
TT
)(
))((~~
|~~|)(
21
2121
21
221
)(maxarg* WJWW
problem eigenvalue dgeneralize a is this )(max wSwSWJ WB

Solution I
If Sw is not singular
You can simply do eigenvalue decomposition on SW
-1SB
wwSS BW 1

Solution II
Noticing:– SBW is on the direction of m1-m2 (WHY?)
– We are only concern about the direction of the projection, rather than the scale
We have
)( 211 mmSw W

Multiple Discriminant Analysis
C
kkW
Dx
Tiii
Dxii
SS
mxmxS
xn
m
i
i
1
))((
,1
WSWmmmmnS
WSWS
mnn
m
mWyn
m
BT
C
k
TiiiB
WT
W
C
kkk
iT
Yyii
i
1
1
)~~)(~~(~
,~
,~1~
,1~
xWy T
||
||
|~
|
|~
|maxarg*
WSW
WSW
S
SW
WT
BT
W
B
W
iWiB wSwS
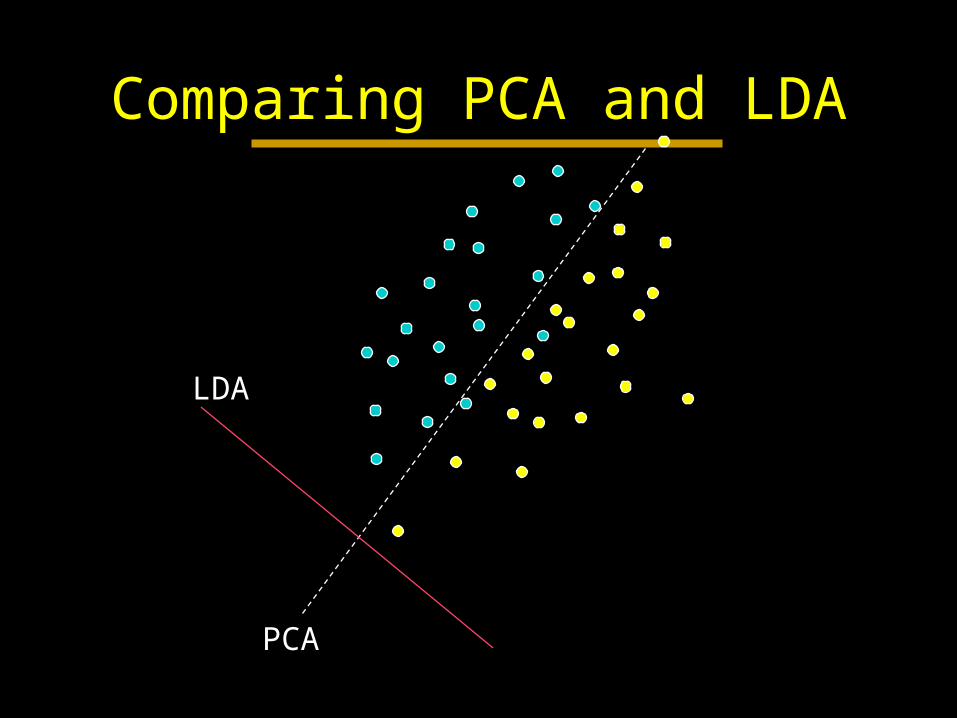
Comparing PCA and LDA
PCA
LDA

MDA for Face Recognition
Lighting
• PCA does not work well! (why?)
• solution: PCA+MDA

Independent Component Analysis
The cross-talk problem ICA

Cocktail party
t
S1(t)
S2(t)
t
t
x1(t)
t
x2(t)
t
x3(t)
A
Can you recover s1(t) and s2(t) from x1(t), x2(t) and x3(t)?

Formulation
ASXsaX
jsasaxn
iii
njnjj
or
...
1
11
Both A and S are unknowns!
Can you recover both A and S from X?

The Idea
y is a linear combination of {si} Recall the central limit theory! A sum of even two independent r.v. is more
Gaussian than the original r.v. So, ZTS should be more Gaussian than any of {si} In other words, ZTS become least Gaussian when
in fact equal to {si} Amazed!
SZASWXWY TTT

Face Recognition: Challenges
View







