Download - Funiculaire à Contrepoids à Eau Page 1/36

Funiculaire à Contrepoids à Eau Page 1/36
Funiculaire à Contrepoids à Eau Page 2/36
Sommaire I. Présentation ..................................................................................3
111... EEElllèèèvvveeesss ddduuu gggrrrooouuupppeee ......................................................................................3 222... PPPrrrooofffeeesssssseeeuuurrr cccoooooorrrdddiiinnnaaattteeeuuurrr...........................................................................3 333... EEEtttaaabbbllliiisssssseeemmmeeennnttt ...........................................................................................3 444... PPPaaarrrttteeennnaaaiiirrreeesss ...............................................................................................3
III. Budget ........................................................................................6 IV. Analyse fonctionnelle ..................................................................7
111... ««« BBBêêêttteee ààà cccooorrrnnneeesss »»»......................................................................................7 222... ««« PPPiiieeeuuuvvvrrreee »»» ...............................................................................................8 333... DDDiiiaaagggrrraaammmmmmeee FFFAAASSSTTT ......................................................................................9 444... CCChhhaaaîîînnneee ddd’’’ééénnneeerrrgggiiieee eeettt ddd’’’iiinnnfffooorrrmmmaaatttiiiooonnn .........................................................10
V. Conception de la maquette .........................................................11 111... PPPrrréééssseeennntttaaatttiiiooonnn ...........................................................................................11 222... EEEtttaaapppeeesss dddeee cccooonnnssstttrrruuuccctttiiiooonnn...........................................................................11 333... PPPrrrooobbblllèèèmmmeeesss rrreeennncccooonnntttrrrééésss ............................................................................13
VI. Conception électrique et informatique......................................14 111... PPPrrréééssseeennntttaaatttiiiooonnn ...........................................................................................14 222... RRRéééaaallliiisssaaatttiiiooonnn dddeeesss sssccchhhééémmmaaasss éééllleeeccctttrrriiiqqquuueeesss.....................................................15 333... RRRéééaaallliiisssaaatttiiiooonnn ddduuu tttyyypppooonnn eeettt ddduuu ccciiirrrcccuuuiiittt iiimmmppprrriiimmmééé ...........................................17 444... RRRéééaaallliiisssaaatttiiiooonnn ddduuu ppprrrooogggrrraaammmmmmeee.....................................................................18 111... PPPrrriiinnnccciiipppeee fffooonnndddaaammmeeennntttaaalll dddeee lllaaa dddyyynnnaaammmiiiqqquuueee.................................................22 222... AAAppppppllliiicccaaatttiiiooonnn ààà nnnoootttrrreee sssyyyssstttèèèmmmeee...................................................................22 333... EEEtttuuudddeee ddduuu sssyyyssstttèèèmmmeee dddaaannnsss llleee cccaaasss iiidddéééaaalll ooouuu llleeesss fffrrroootttttteeemmmeeennntttsss sssooonnnttt nnnééégggllliiigggééésss .23 444... EEEtttuuudddeee ddduuu sssyyyssstttèèèmmmeee dddaaannnsss llleee cccaaasss oooùùù llleeesss fffrrroootttttteeemmmeeennntttsss nnneee sssooonnnttt pppaaasss nnnééégggllliiigggééésss....................................................................................................................25 555... CCCooommmpppaaarrraaaiiisssooonnn dddeeesss rrrééésssuuullltttaaatttsss eeexxxpppééérrriiimmmeeennntttaaauuuxxx eeettt dddeee lll’’’ééétttuuudddeee ttthhhéééooorrriiiqqquuueee ....31 666... EEExxxpppllliiicccaaatttiiiooonnn dddeeesss ppprrriiissseeesss dddeee mmmeeesssuuurrreeesss.........................................................35
VIII. Conclusion ..............................................................................36 111... SSSuuurrr llleee ppprrrooojjjeeettt............................................................................................36 222... SSSooouuurrrccceeesss ...................................................................................................36 333... LLLooogggiiiccciiieeelllsss uuutttiiillliiisssééésss .....................................................................................36 444... RRReeemmmeeerrrccciiieeemmmeeennntttsss.......................................................................................36
Funiculaire à Contrepoids à Eau Page 3/36
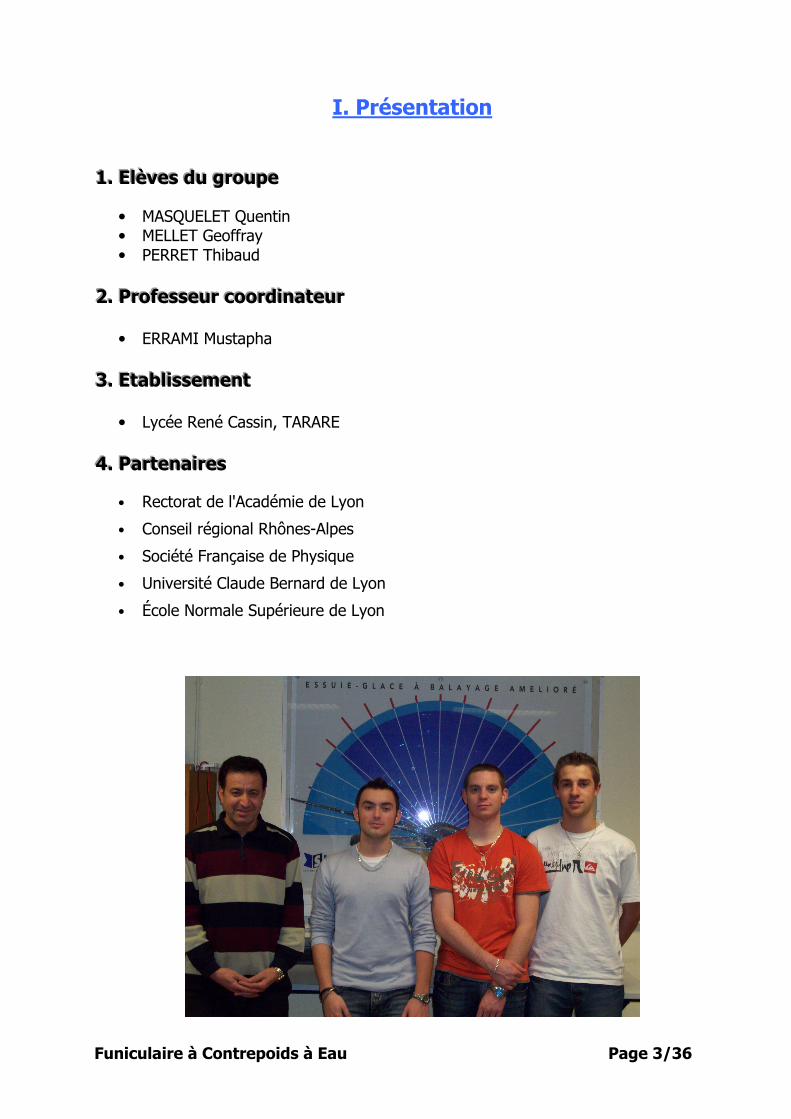
I. Présentation
111... EEElllèèèvvveeesss ddduuu gggrrrooouuupppeee
• MASQUELET Quentin • MELLET Geoffray • PERRET Thibaud
222... PPPrrrooofffeeesssssseeeuuurrr cccoooooorrrdddiiinnnaaattteeeuuurrr
• ERRAMI Mustapha
333... EEEtttaaabbbllliiisssssseeemmmeeennnttt
• Lycée René Cassin, TARARE
444... PPPaaarrrttteeennnaaaiiirrreeesss
• Rectorat de l'Académie de Lyon
• Conseil régional Rhônes-Alpes
• Société Française de Physique
• Université Claude Bernard de Lyon
• École Normale Supérieure de Lyon
Funiculaire à Contrepoids à Eau Page 4/36
II. Résumé du projet
De tout temps l’homme a cherché à se déplacer ou alors à transporter des objets très
lourds de manière pratique. Dès la période des pyramides, les hommes utilisaient un système avec des rondins de bois pour faire glisser les pierres. Ensuite des systèmes à contrepoids ont été élaborés. De nos jours de nombreux moyens de transport sont en activité, mais la plupart consomment beaucoup trop d’énergie et sont souvent nuisibles à notre environnement. Ce problème pouvant engendrer d’importantes catastrophes naturelles et réduire l’espérance de vie de l’être humain.
Nous avons cherché alors à répondre à la problématique suivante : Comment concevoir et réaliser un moyen de transport
permettant d’utiliser l’énergie et le progrès, tout en respectant l’environnement ?
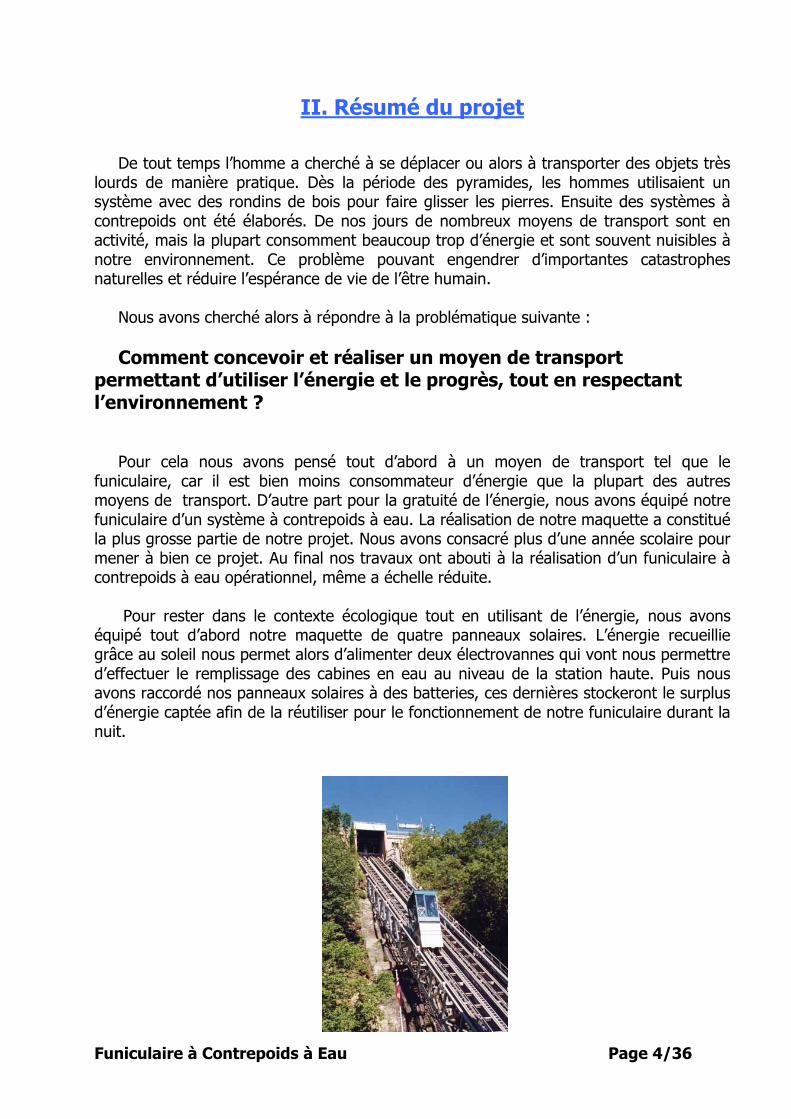
Pour cela nous avons pensé tout d’abord à un moyen de transport tel que le
funiculaire, car il est bien moins consommateur d’énergie que la plupart des autres moyens de transport. D’autre part pour la gratuité de l’énergie, nous avons équipé notre funiculaire d’un système à contrepoids à eau. La réalisation de notre maquette a constitué la plus grosse partie de notre projet. Nous avons consacré plus d’une année scolaire pour mener à bien ce projet. Au final nos travaux ont abouti à la réalisation d’un funiculaire à contrepoids à eau opérationnel, même a échelle réduite.
Pour rester dans le contexte écologique tout en utilisant de l’énergie, nous avons
équipé tout d’abord notre maquette de quatre panneaux solaires. L’énergie recueillie grâce au soleil nous permet alors d’alimenter deux électrovannes qui vont nous permettre d’effectuer le remplissage des cabines en eau au niveau de la station haute. Puis nous avons raccordé nos panneaux solaires à des batteries, ces dernières stockeront le surplus d’énergie captée afin de la réutiliser pour le fonctionnement de notre funiculaire durant la nuit.
Funiculaire à Contrepoids à Eau Page 5/36
L’une des deux cabines, qui est placée au niveau de la station haute et qui est reliée par un câble à l’autre cabine placée à la station basse, est remplie d’eau, elle devient alors plus lourde que l’autre et se met à descendre. Arrivée à la station basse notre cabine se videra grâce à un système de doigt (un doigt étant placé à la station basse va lever la bille placée dans le clapet anti-retour situé dans la cabine, cette dernière retenant l’eau, enclenchera alors la vidange de la cabine).
Puis pour automatiser notre funiculaire nous avons créé un programme. Un
microcontrôleur joue alors le rôle du cerveau pour faire fonctionner notre projet. Par la suite plusieurs expériences nous ont permis de faire une étude plus approfondie du mécanisme de notre funiculaire. Pour nous venir en aide dans ce projet M. Jaubert Ludovic, qui prépare un doctorat en physique, est intervenant en tant que moniteur de physique du CIES de Lyon.
Devant les difficultés de réalisation de notre projet, le temps de travail dont nous
disposions dans le cadre du Projet Personnel Encadré avec nos professeurs de Science de l’Ingénieur était trop faible pour nos ambitions. Il nous a donc fallu continuer notre travail en dehors des cours, au lycée avec l’aide précieuse de monsieur Errami et chez nous avec nos propres moyens.
Funiculaire à Contrepoids à Eau Page 6/36
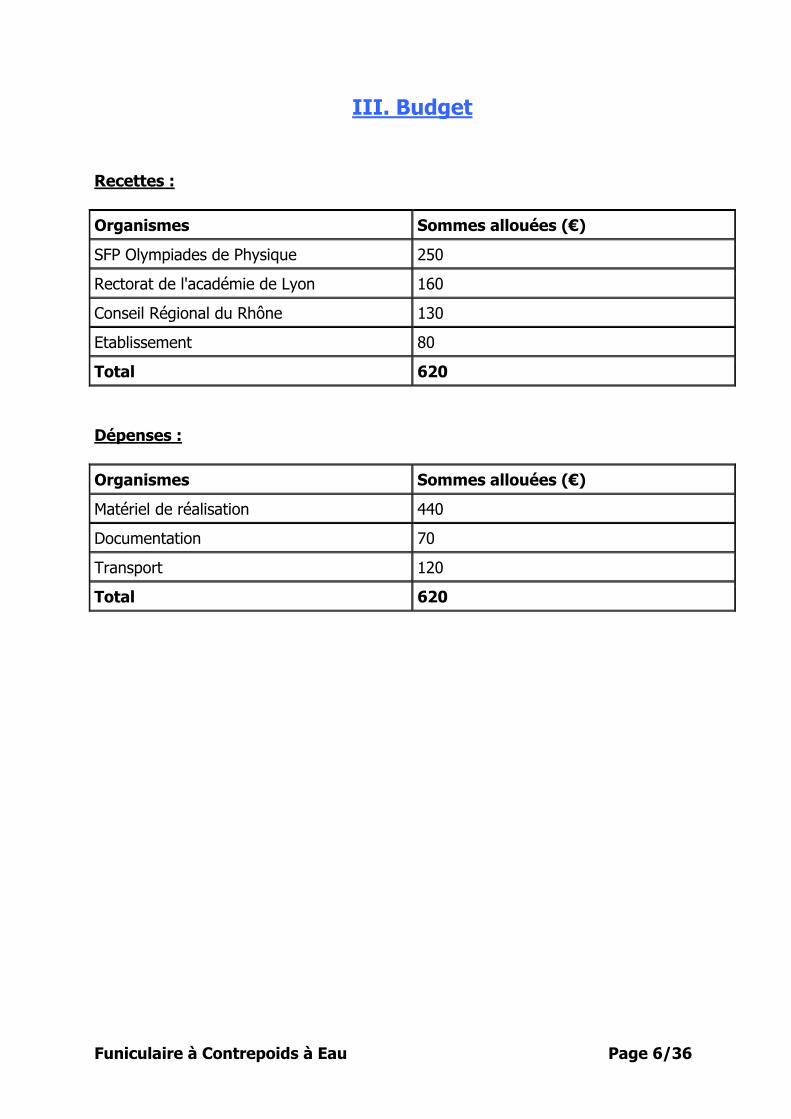
III. Budget
Recettes :
Organismes Sommes allouées (€)
SFP Olympiades de Physique 250
Rectorat de l'académie de Lyon 160
Conseil Régional du Rhône 130
Etablissement 80
Total 620
Dépenses :
Organismes Sommes allouées (€)
Matériel de réalisation 440
Documentation 70
Transport 120
Total 620
Funiculaire à Contrepoids à Eau Page 7/36
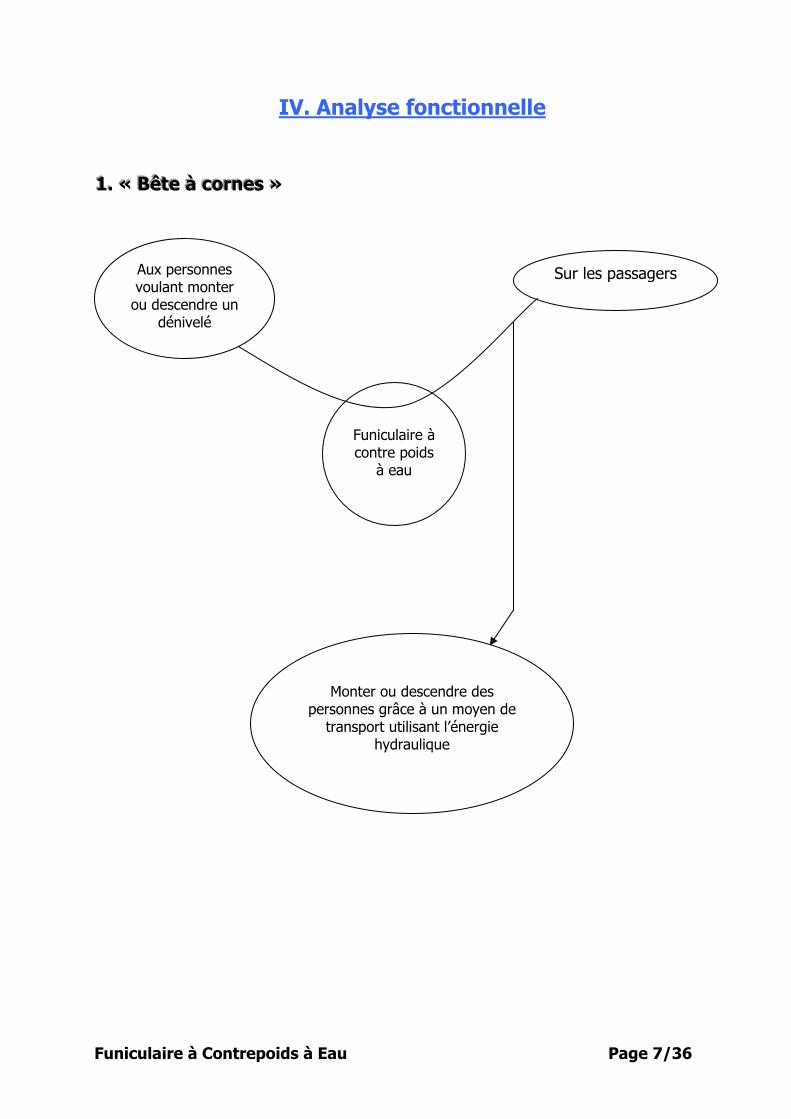
IV. Analyse fonctionnelle
111... ««« BBBêêêttteee ààà cccooorrrnnneeesss »»»
Aux personnes voulant monter ou descendre un
dénivelé
Funiculaire à contre poids
à eau
Sur les passagers
Monter ou descendre des
personnes grâce à un moyen de transport utilisant l’énergie
hydraulique
Funiculaire à Contrepoids à Eau Page 8/36
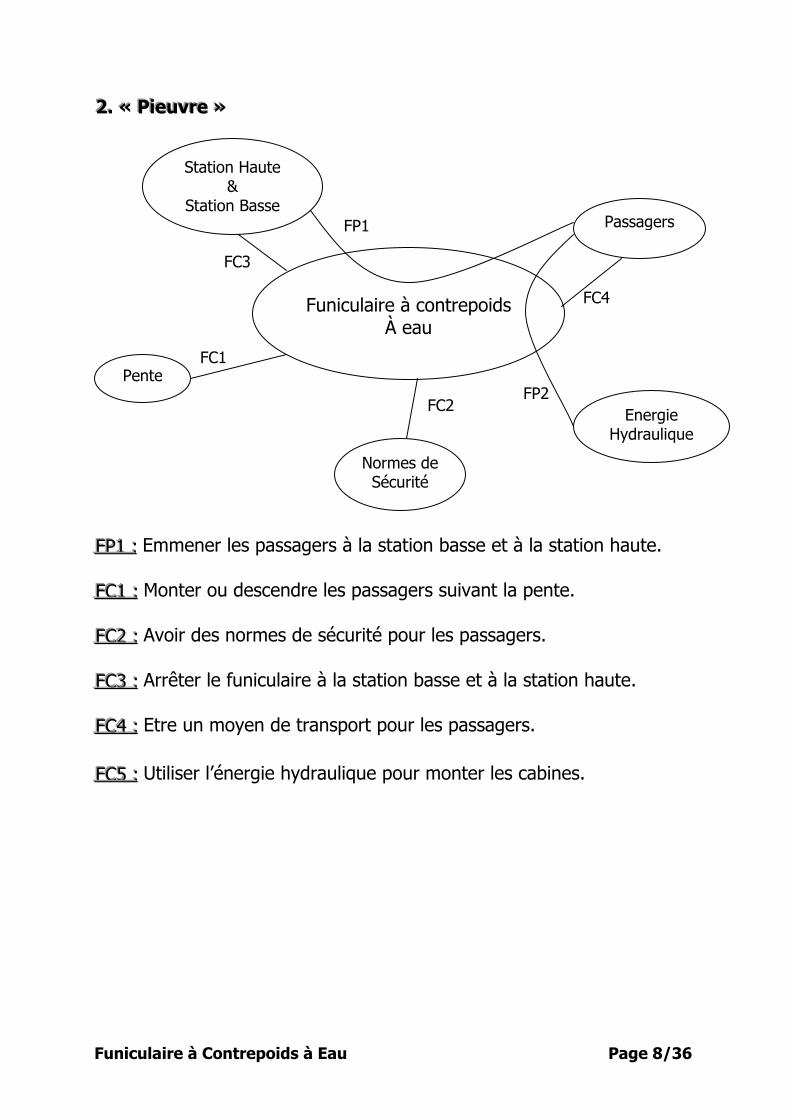
222... ««« PPPiiieeeuuuvvvrrreee »»»
FFFPPP111 ::: Emmener les passagers à la station basse et à la station haute. FFFCCC111 ::: Monter ou descendre les passagers suivant la pente. FFFCCC222 ::: Avoir des normes de sécurité pour les passagers. FFFCCC333 ::: Arrêter le funiculaire à la station basse et à la station haute. FFFCCC444 ::: Etre un moyen de transport pour les passagers.
FFFCCC555 ::: Utiliser l’énergie hydraulique pour monter les cabines.
Funiculaire à contrepoids
À eau
Passagers
Energie Hydraulique
Normes de Sécurité
Station Haute &
Station Basse
Pente FC1
FC2
FC3
FC4
FP1
FP2
Funiculaire à Contrepoids à Eau Page 9/36
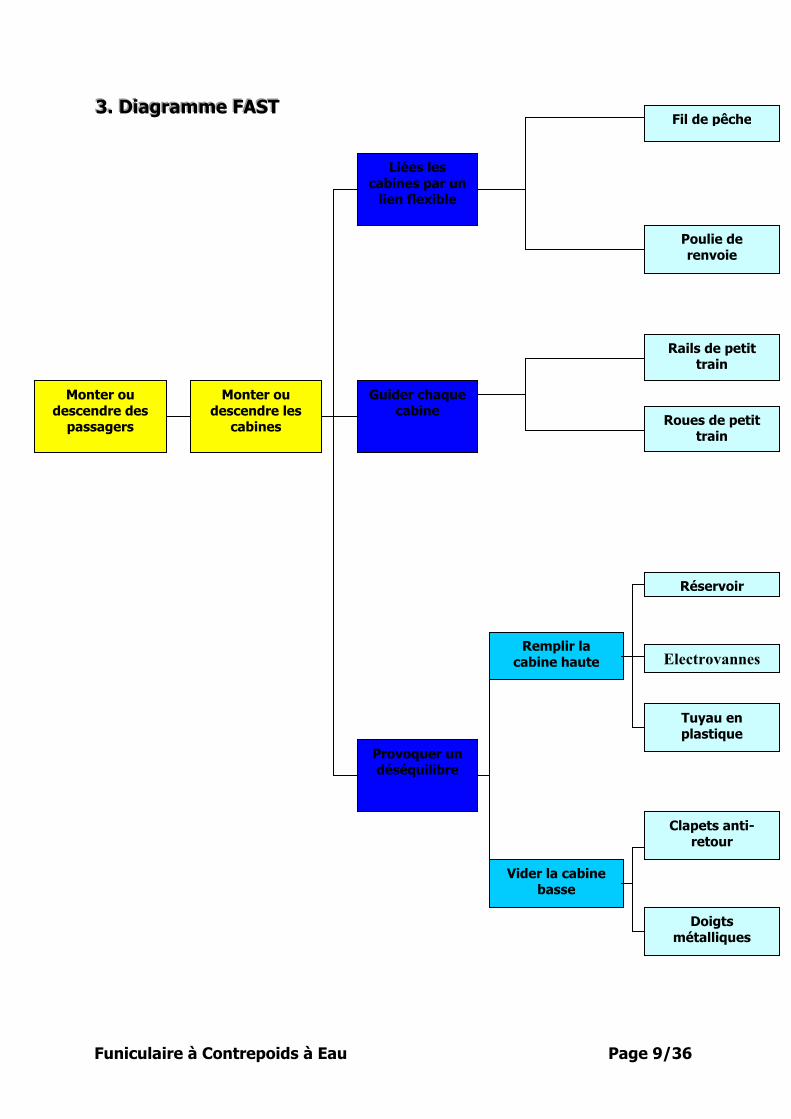
333... DDDiiiaaagggrrraaammmmmmeee FFFAAASSSTTT
Monter ou descendre des passagers
Monter ou descendre les
cabines
Provoquer un déséquilibre
Guider chaque cabine
Liées les cabines par un lien flexible
Remplir la cabine haute
Vider la cabine basse
Réservoir
Electrovannes
Tuyau en plastique
Clapets anti-retour
Doigts métalliques
Poulie de renvoie
Fil de pêche
Rails de petit train
Roues de petit train

Funiculaire à Contrepoids à Eau Page 10/36
444... CCChhhaaaîîînnneee ddd’’’ééénnneeerrrgggiiieee eeettt ddd’’’iiinnnfffooorrrmmmaaatttiiiooonnn Chaîne d’information : Chaîne d’énergie :
Alimenter Agir
Source d’énergie Solaire
Distribuer Convertir Transmettre
Energie : Électrique
Energie : Électrique
Energie : Mécanique
Energie : Mécanique
Constituants : Panneaux solaires Batteries
Constituants : Transistors
Constituants : Electrovannes
Constituants : Contrepoids
Traiter Communiquer
Constituants : Microcontrôleur
Ordre chaîne d’énergie
Acquérir
Constituants : Boutons poussoirs, Capteurs

Funiculaire à Contrepoids à Eau Page 11/36
V. Conception de la maquette 111... PPPrrréééssseeennntttaaatttiiiooonnn
En mécanique nos trois gros travaux consistaient en :
• la recherche des dimensions de la maquette • le problème de l’étanchéité des cabines • le positionnement rectiligne des rails
222... EEEtttaaapppeeesss dddeee cccooonnnssstttrrruuuccctttiiiooonnn Pour réaliser notre maquette nous avons procédé par plusieurs grandes étapes :
1ère étape :
• Recherche des dimensions et de la forme de notre maquette • Réalisation de différentes études et de plans, ce qui nous a amené à trouver les
dimensions suivantes :
1. Dénivelé : 94 cm 2. Longueur totale : 130 cm 3. Pente : 100% 4. Largeur : 40 cm
• Modélisation du socle sur Solidworks® afin de vérifier les dimensions choisies et
dans l’optique de modéliser l’ensemble du projet. (cf.1)
1) Mise en plan du socle
Funiculaire à Contrepoids à Eau Page 12/36
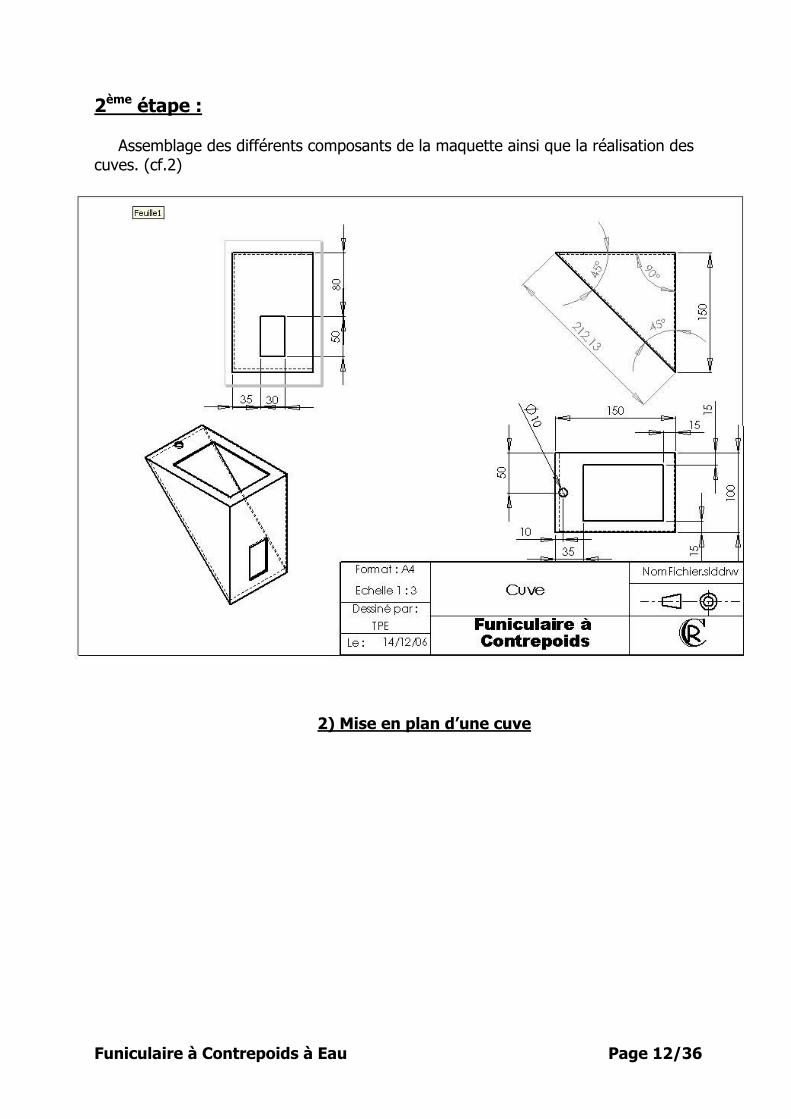
2ème étape :
Assemblage des différents composants de la maquette ainsi que la réalisation des cuves. (cf.2)
2) Mise en plan d’une cuve
Funiculaire à Contrepoids à Eau Page 13/36
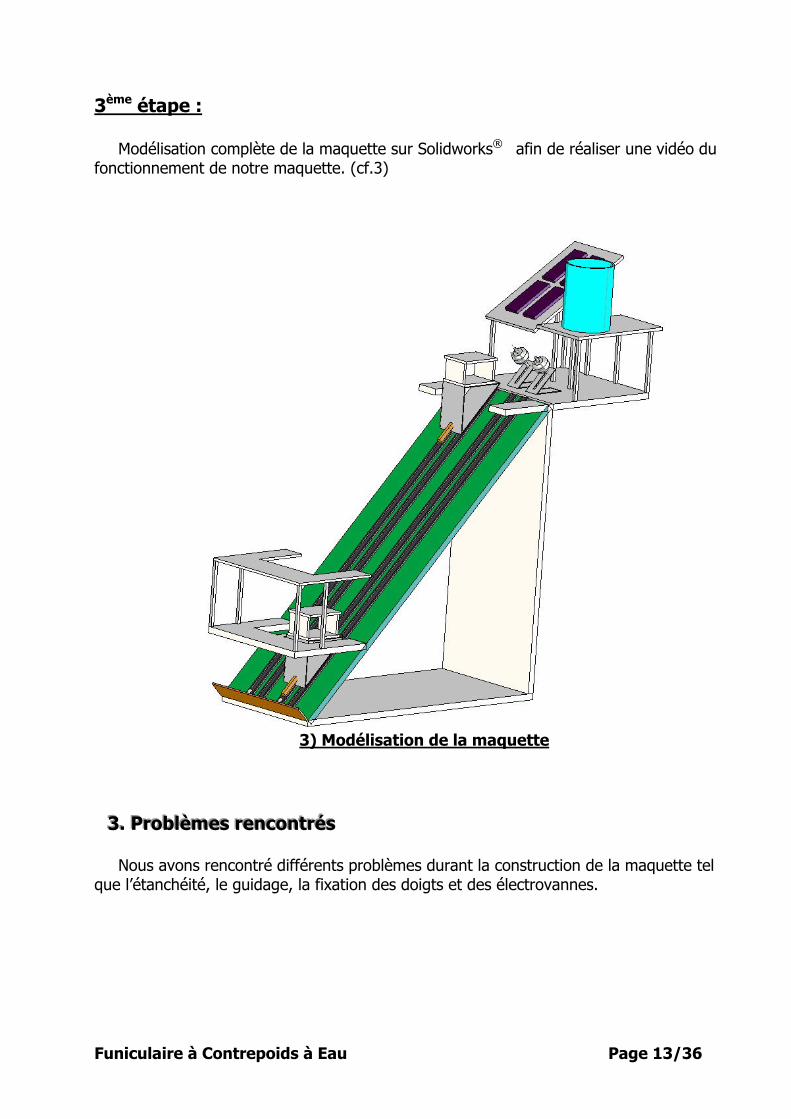
3ème étape :
Modélisation complète de la maquette sur Solidworks® afin de réaliser une vidéo du fonctionnement de notre maquette. (cf.3)
3) Modélisation de la maquette
333... PPPrrrooobbblllèèèmmmeeesss rrreeennncccooonnntttrrrééésss
Nous avons rencontré différents problèmes durant la construction de la maquette tel que l’étanchéité, le guidage, la fixation des doigts et des électrovannes.
Funiculaire à Contrepoids à Eau Page 14/36
VI. Conception électrique et informatique
111... PPPrrréééssseeennntttaaatttiiiooonnn
Pour automatiser notre funiculaire, nous avons du diviser notre travail en deux
grandes parties : La partie électrique :
Le remplissage de nos cabines repose sur l’utilisation de deux électrovannes alimentées en 24 Volts. Pour rester dans notre objectif majeur, à savoir être écologique, nous voulions que notre funiculaire soit complètement autonome. Pour cela nous avons installé quatre panneaux solaires qui viennent recharger deux batteries de 12 Volts branchées en série afin d’alimenter les électrovannes. La partie informatique :
Afin d’automatiser le remplissage de nos cabines, nous avons choisi d’utiliser deux capteurs ILS disposés à la station haute permettant de détecter la présence des cabines et d’envoyer l’information au microcontrôleur (PICBASIC 1S). Le microcontrôleur est le « cerveau » du funiculaire, c’est lui qui gère son fonctionnement à travers un programme que nous avons élaboré, ensuite il envoie l’ordre ou non aux électrovannes afin de gérer leur fonctionnement.
Funiculaire à Contrepoids à Eau Page 15/36
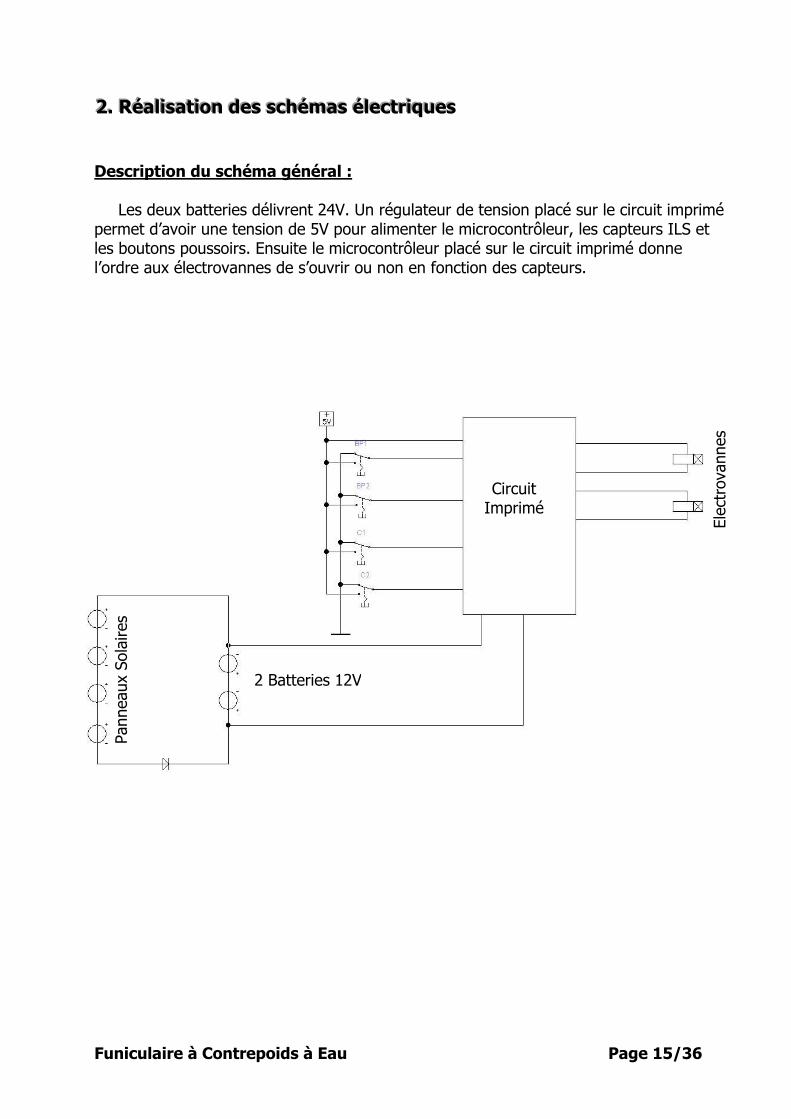
222... RRRéééaaallliiisssaaatttiiiooonnn dddeeesss sssccchhhééémmmaaasss éééllleeeccctttrrriiiqqquuueeesss
Description du schéma général :
Les deux batteries délivrent 24V. Un régulateur de tension placé sur le circuit imprimé permet d’avoir une tension de 5V pour alimenter le microcontrôleur, les capteurs ILS et les boutons poussoirs. Ensuite le microcontrôleur placé sur le circuit imprimé donne l’ordre aux électrovannes de s’ouvrir ou non en fonction des capteurs.
2 Batteries 12V
Circuit Imprimé
Electrovannes
Pann
eaux Solaires
Funiculaire à Contrepoids à Eau Page 16/36
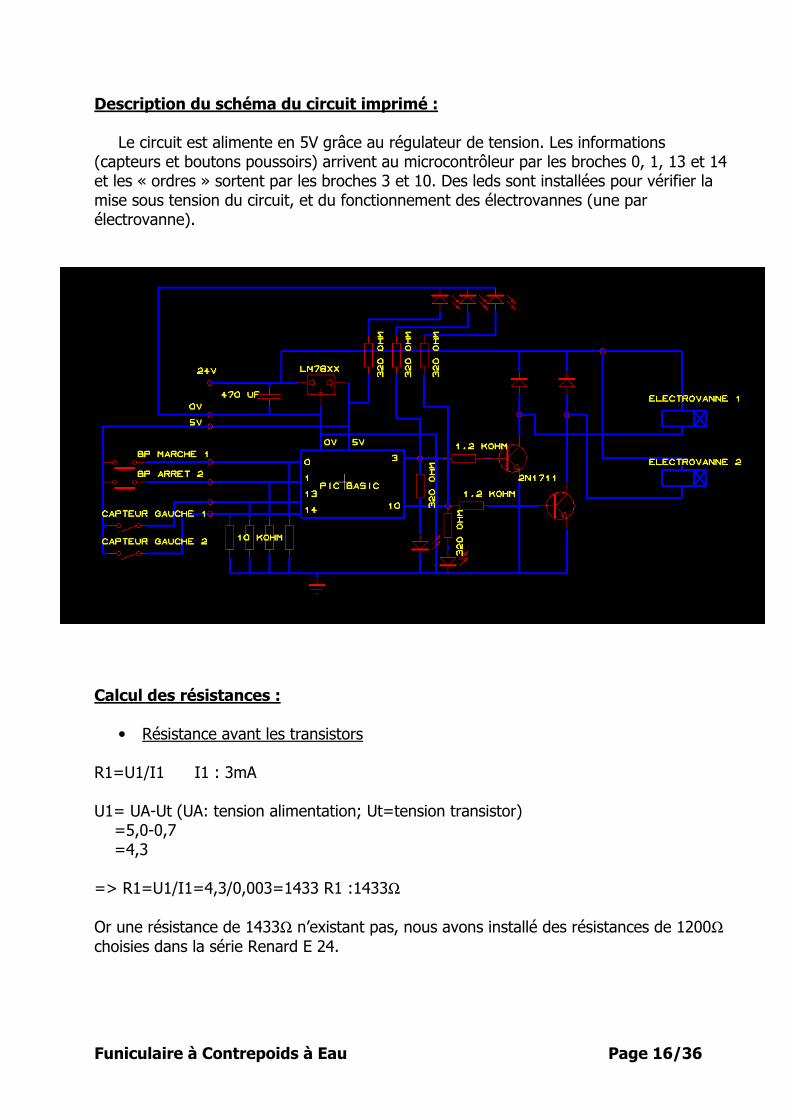
Description du schéma du circuit imprimé :
Le circuit est alimente en 5V grâce au régulateur de tension. Les informations (capteurs et boutons poussoirs) arrivent au microcontrôleur par les broches 0, 1, 13 et 14 et les « ordres » sortent par les broches 3 et 10. Des leds sont installées pour vérifier la mise sous tension du circuit, et du fonctionnement des électrovannes (une par électrovanne).
Calcul des résistances :
• Résistance avant les transistors R1=U1/I1 I1 : 3mA U1= UA-Ut (UA: tension alimentation; Ut=tension transistor) =5,0-0,7 =4,3 => R1=U1/I1=4,3/0,003=1433 R1 :1433Ω Or une résistance de 1433Ω n’existant pas, nous avons installé des résistances de 1200Ω choisies dans la série Renard E 24.
Funiculaire à Contrepoids à Eau Page 17/36
333... RRRéééaaallliiisssaaatttiiiooonnn ddduuu tttyyypppooonnn eeettt ddduuu ccciiirrrcccuuuiiittt iiimmmppprrriiimmmééé
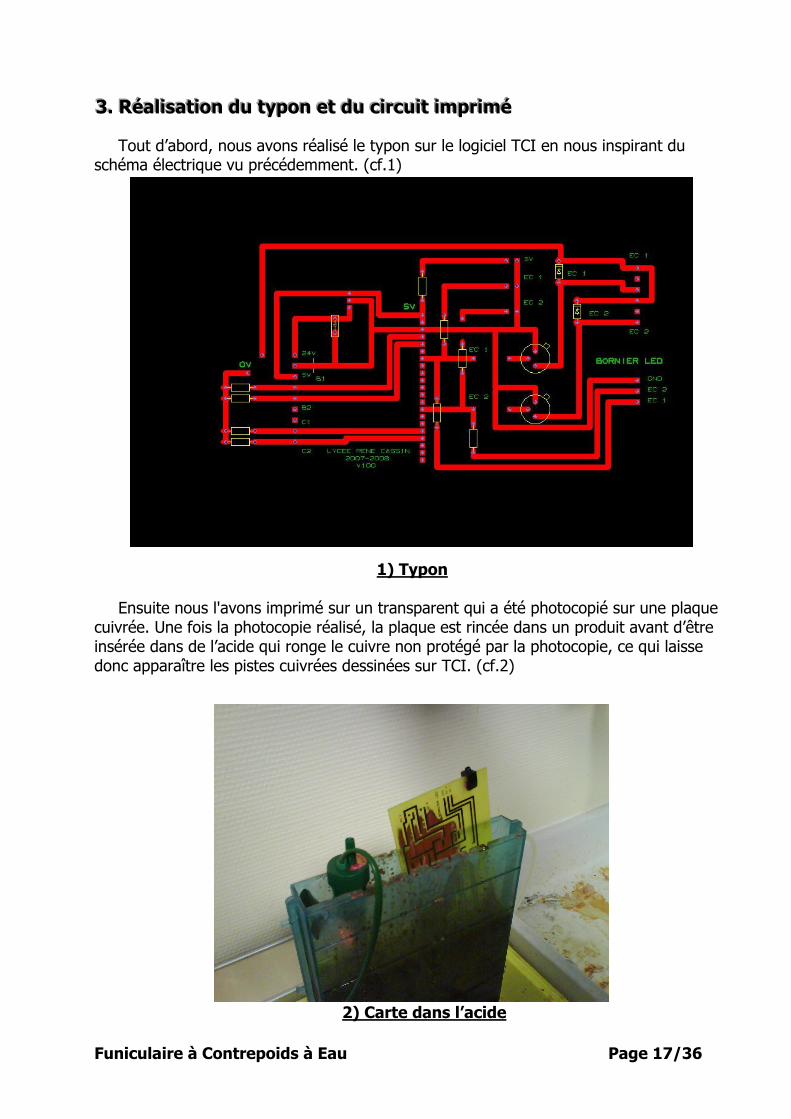
Tout d’abord, nous avons réalisé le typon sur le logiciel TCI en nous inspirant du schéma électrique vu précédemment. (cf.1)
1) Typon
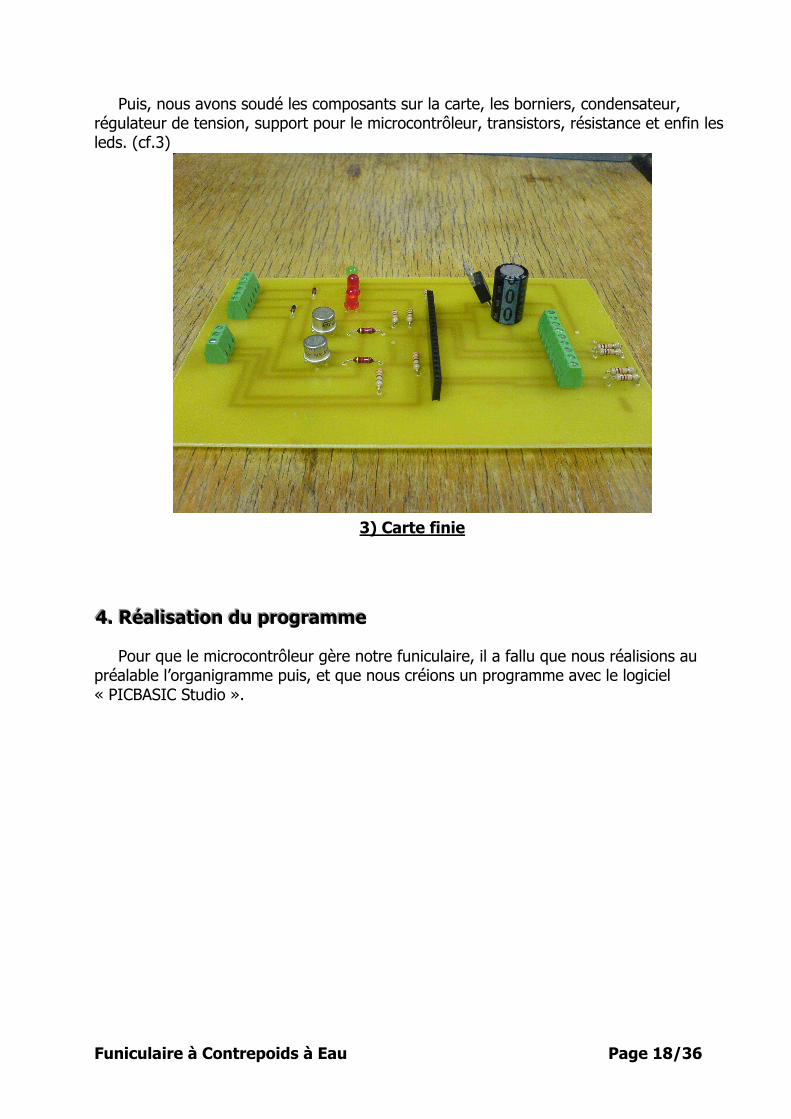
Ensuite nous l'avons imprimé sur un transparent qui a été photocopié sur une plaque cuivrée. Une fois la photocopie réalisé, la plaque est rincée dans un produit avant d’être insérée dans de l’acide qui ronge le cuivre non protégé par la photocopie, ce qui laisse donc apparaître les pistes cuivrées dessinées sur TCI. (cf.2)
2) Carte dans l’acide
Funiculaire à Contrepoids à Eau Page 18/36
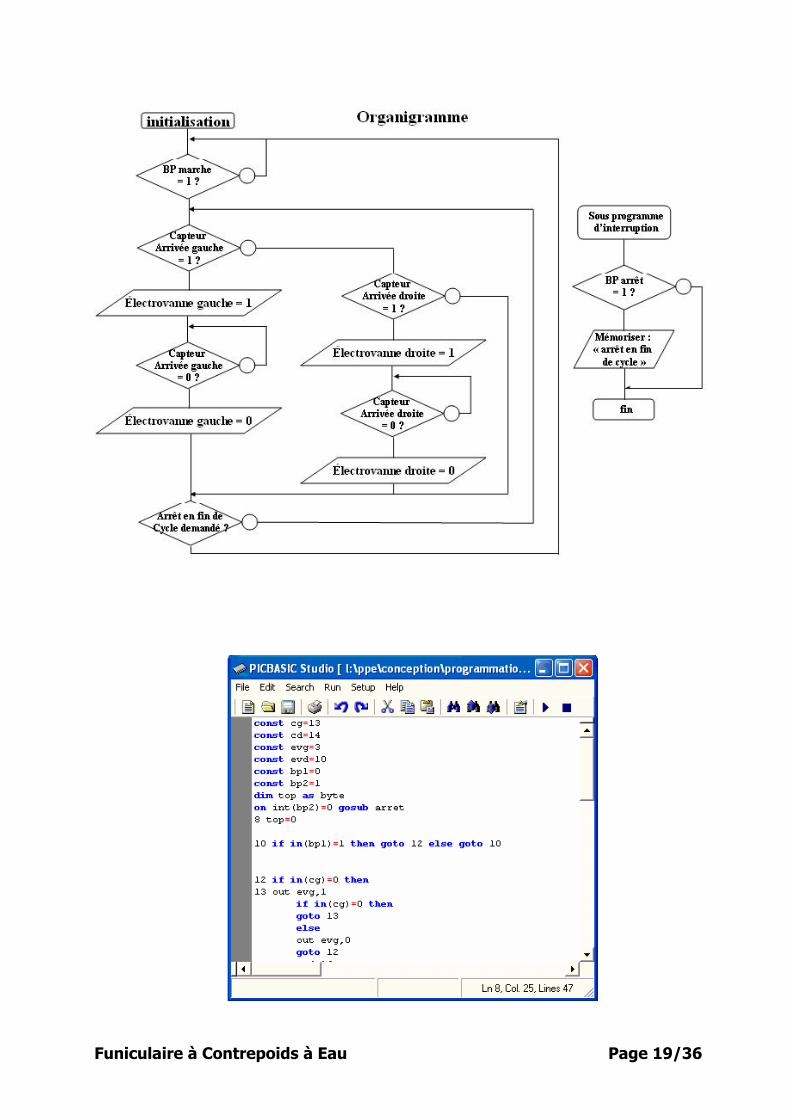
Puis, nous avons soudé les composants sur la carte, les borniers, condensateur, régulateur de tension, support pour le microcontrôleur, transistors, résistance et enfin les leds. (cf.3)
3) Carte finie
444... RRRéééaaallliiisssaaatttiiiooonnn ddduuu ppprrrooogggrrraaammmmmmeee Pour que le microcontrôleur gère notre funiculaire, il a fallu que nous réalisions au
préalable l’organigramme puis, et que nous créions un programme avec le logiciel « PICBASIC Studio ».
Funiculaire à Contrepoids à Eau Page 19/36
Funiculaire à Contrepoids à Eau Page 20/36
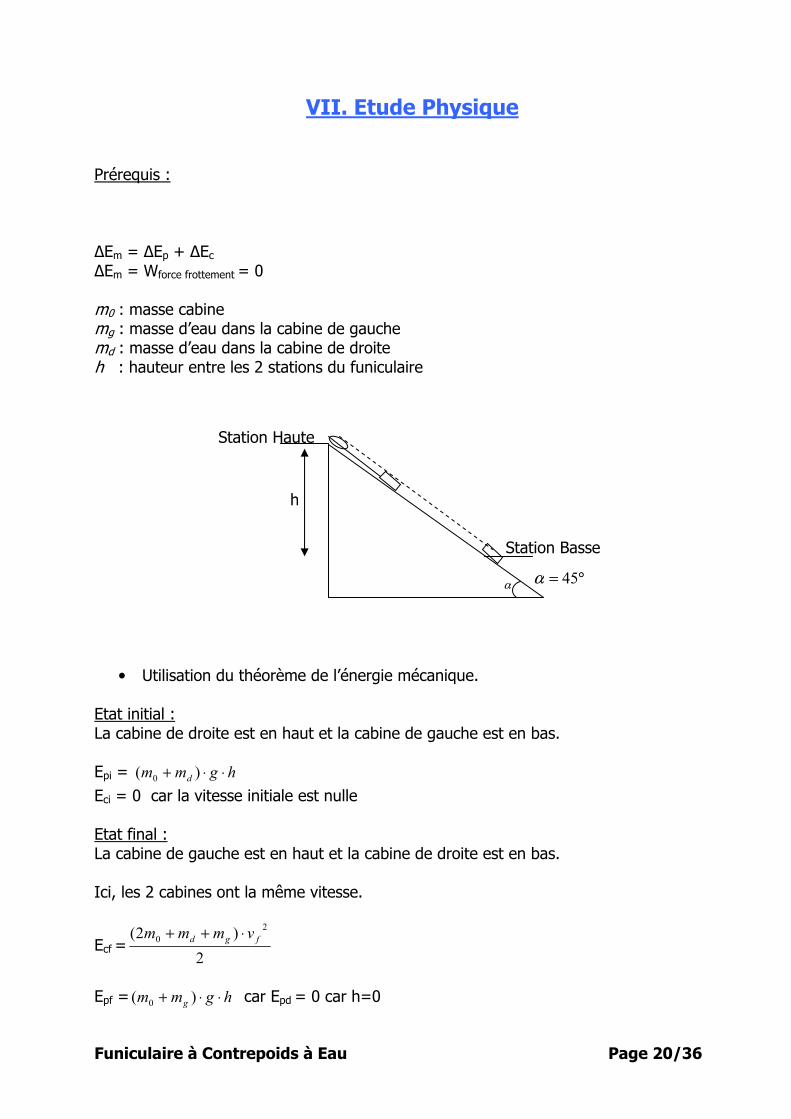
VII. Etude Physique
Prérequis : ∆Em = ∆Ep + ∆Ec ∆Em = Wforce frottement = 0 m0 : masse cabine mg : masse d’eau dans la cabine de gauche md : masse d’eau dans la cabine de droite h : hauteur entre les 2 stations du funiculaire
• Utilisation du théorème de l’énergie mécanique. Etat initial : La cabine de droite est en haut et la cabine de gauche est en bas. Epi = hgmm d ⋅⋅+ )( 0 Eci = 0 car la vitesse initiale est nulle Etat final : La cabine de gauche est en haut et la cabine de droite est en bas. Ici, les 2 cabines ont la même vitesse.
Ecf =2
)2( 20 fgd vmmm ⋅++
Epf = hgmm g ⋅⋅+ )( 0 car Epd = 0 car h=0
α °= 45α
h
Station Haute
Station Basse

Funiculaire à Contrepoids à Eau Page 21/36
En effet, la cabine de droite étant à la station basse (donc à h=0), son énergie potentielle est nulle. ∆Ep = Epf - Epi ∆Ec = Ecf - Eci ∆Em = (Epf - Epi) + Ecf car Eci =0
∆Em =
⋅+++⋅⋅+−⋅⋅+
2
)2())(())((
20
00fgd
dg
vmmmhgmmhgmm
∆Em =
⋅+++−⋅
2
)2())((
20 fgd
dg
vmmmmmhg
⋅++
2
)2( 20 fgd vmmm
= ∆Em – ( )))(( dg mmhg −⋅
∆Em = 0
2fv =
)2(
))((2
0 gd
dg
mmm
mmhg
++
−⋅−
fv = )2(
))((2
0 gd
dg
mmm
mmhg
++
+−⋅
L’équation montre que si gm > dm , l’équation n’est pas solvable donc les cabines ne
bougent pas.
Funiculaire à Contrepoids à Eau Page 22/36
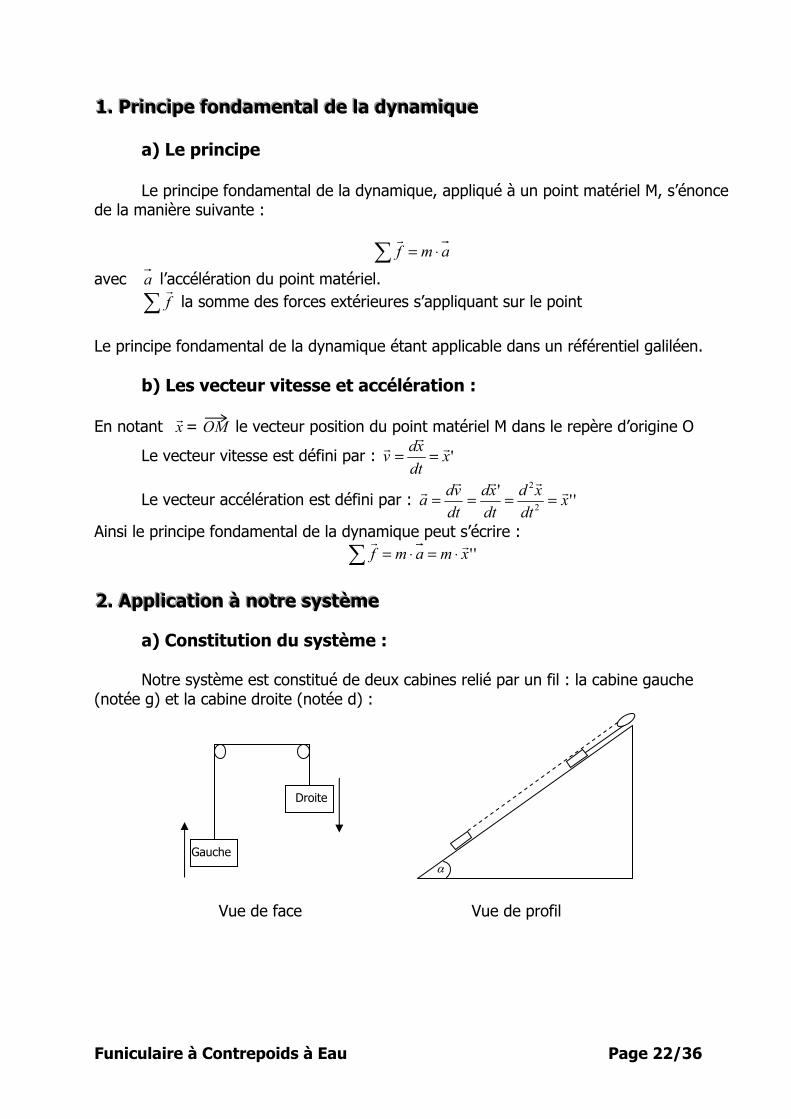
111... PPPrrriiinnnccciiipppeee fffooonnndddaaammmeeennntttaaalll dddeee lllaaa dddyyynnnaaammmiiiqqquuueee
a) Le principe
Le principe fondamental de la dynamique, appliqué à un point matériel M, s’énonce de la manière suivante :
amf ⋅=∑r
avec a l’accélération du point matériel. ∑ f
r la somme des forces extérieures s’appliquant sur le point
Le principe fondamental de la dynamique étant applicable dans un référentiel galiléen.
b) Les vecteur vitesse et accélération : En notant x
r= OM le vecteur position du point matériel M dans le repère d’origine O
Le vecteur vitesse est défini par : 'xdt
xdv
rr
r==
Le vecteur accélération est défini par : '''
2
2
xdt
xd
dt
xd
dt
vda
rrrr
r====
Ainsi le principe fondamental de la dynamique peut s’écrire : ''xmamf
rr⋅=⋅=∑
222... AAAppppppllliiicccaaatttiiiooonnn ààà nnnoootttrrreee sssyyyssstttèèèmmmeee
a) Constitution du système :
Notre système est constitué de deux cabines relié par un fil : la cabine gauche (notée g) et la cabine droite (notée d) : Vue de face Vue de profil
α
Droite
Gauche

Funiculaire à Contrepoids à Eau Page 23/36
b) Le repère choisi :
Le repère d’étude utilisé est constitué d’un axe Ox ayant la direction de la pente comme représenté ci-dessous :
Vue de face Vue de profil
c) Hypothèse sur le fil :
Pour toutes les résolutions et les discussions réalisées ci-dessous, nous avons fait
l’hypothèse suivante : Le fil utilisé est inextensible (il n’est pas étirable).
333... EEEtttuuudddeee ddduuu sssyyyssstttèèèmmmeee dddaaannnsss llleee cccaaasss iiidddéééaaalll ooouuu llleeesss fffrrroootttttteeemmmeeennntttsss sssooonnnttt
nnnééégggllliiigggééésss
a) Bilan des forces :
Dans cette première étude nous allons considérer que les cabines ne subissent aucun frottement.
Dans ce cas là chaque cabine est soumise à 3 forces : son poids ; la réaction de la
pente et la tension du câble. Si nous reprenons nos hypothèses :
O
x
gPr
dPr
gRr
dRr
gTr
dTr
α
O
x
α
Droite
Gauche
x
O

Funiculaire à Contrepoids à Eau Page 24/36
Les cabines ne subissent aucun frottement de la part de la pente, ainsi les réactions du support seront perpendiculaires à la pente. Le câble n’est pas étirable, ainsi, en norme Tg = Td , de plus '' dg xx −= et '''' dg xx −=
b) Résolution du problème : On applique le principe fondamental de la dynamique à la cabine de droite et à la cabine de gauche : Cabine de droite :
ddddddd RTPxmamrrrr
++=⋅=⋅ '' On projette cette égalité sur l’axe Ox (cf. le schéma ci-dessus)) :
dddd TPxm +−=⋅ )sin('' α D’où
)sin('' αdddd PxmT +⋅= Cabine de gauche :
ggggggg RTPxmamrrrr
++=⋅=⋅ ''
On projette cette égalité sur l’axe Ox (cf. le schéma ci-dessus)) : gggg TPxm +−=⋅ )sin('' α
D’où )sin('' αgggg PxmT +⋅=
Comme le fil n’est pas étirable
Tg = Td , de plus '' dg xx −= et '''' dg xx −=
D’où : )sin('')sin('' αα dddggg PxmPxm +⋅=+⋅
En notant gxx =
On arrive à : )sin('')sin('' αα ddgg PxmPxm +⋅−=+⋅
)sin().('')( αgddg PPxmm −=⋅+
Soit :
)(
)sin(.).(''
dg
gd
mm
gmmx
+
−=
α
Donc l’accélération est constante étant donné que les masses et que g restent constantes.
Donc, en choisissant l’origine des temps le moment où les cabines débutent leurs mouvements ( 0)0(')0(')0(' ==−==== txtxtx dg ), on arrive à :
tmm
gmmx
dg
gd
)(
)sin(.).('
+
−=
α
Funiculaire à Contrepoids à Eau Page 25/36
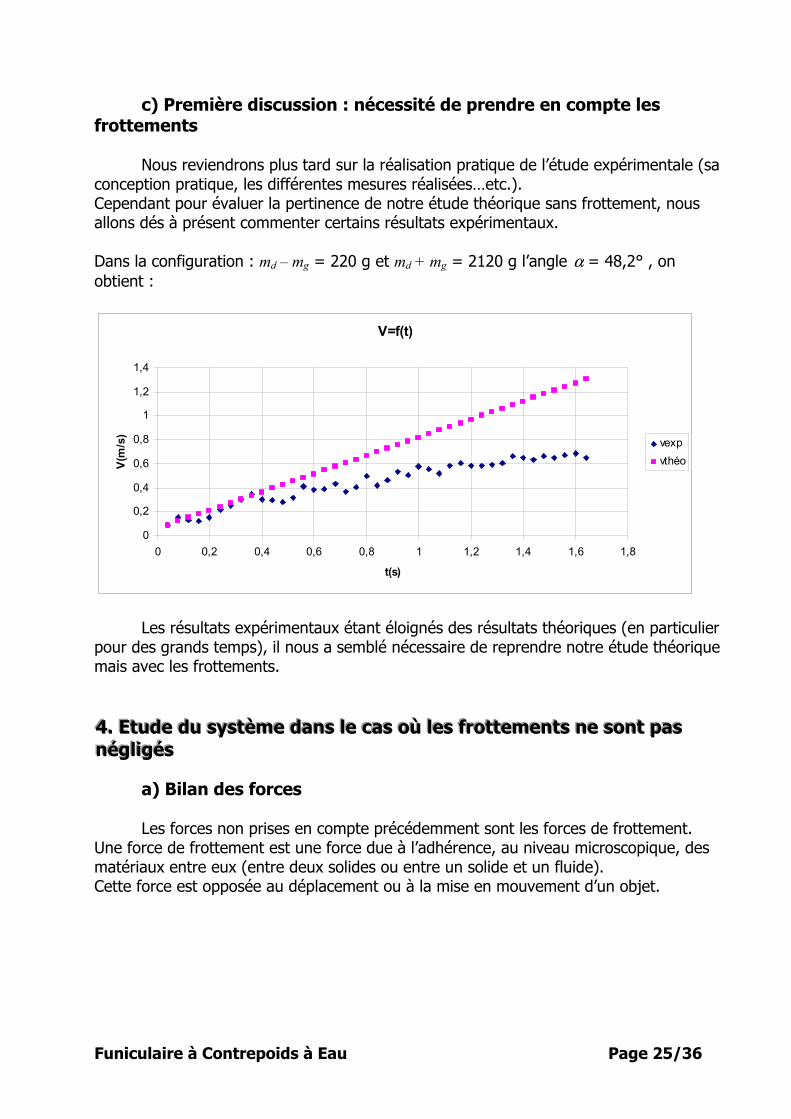
c) Première discussion : nécessité de prendre en compte les frottements
Nous reviendrons plus tard sur la réalisation pratique de l’étude expérimentale (sa conception pratique, les différentes mesures réalisées…etc.). Cependant pour évaluer la pertinence de notre étude théorique sans frottement, nous allons dés à présent commenter certains résultats expérimentaux. Dans la configuration : md – mg = 220 g et md + mg = 2120 g l’angle α = 48,2° , on obtient :
V=f(t)
0
0,2
0,4
0,6
0,8
1
1,2
1,4
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8
t(s)
V(m/s)
vexp
vthéo
Les résultats expérimentaux étant éloignés des résultats théoriques (en particulier pour des grands temps), il nous a semblé nécessaire de reprendre notre étude théorique mais avec les frottements.
444... EEEtttuuudddeee ddduuu sssyyyssstttèèèmmmeee dddaaannnsss llleee cccaaasss oooùùù llleeesss fffrrroootttttteeemmmeeennntttsss nnneee sssooonnnttt pppaaasss
nnnééégggllliiigggééésss
a) Bilan des forces
Les forces non prises en compte précédemment sont les forces de frottement. Une force de frottement est une force due à l’adhérence, au niveau microscopique, des matériaux entre eux (entre deux solides ou entre un solide et un fluide). Cette force est opposée au déplacement ou à la mise en mouvement d’un objet.
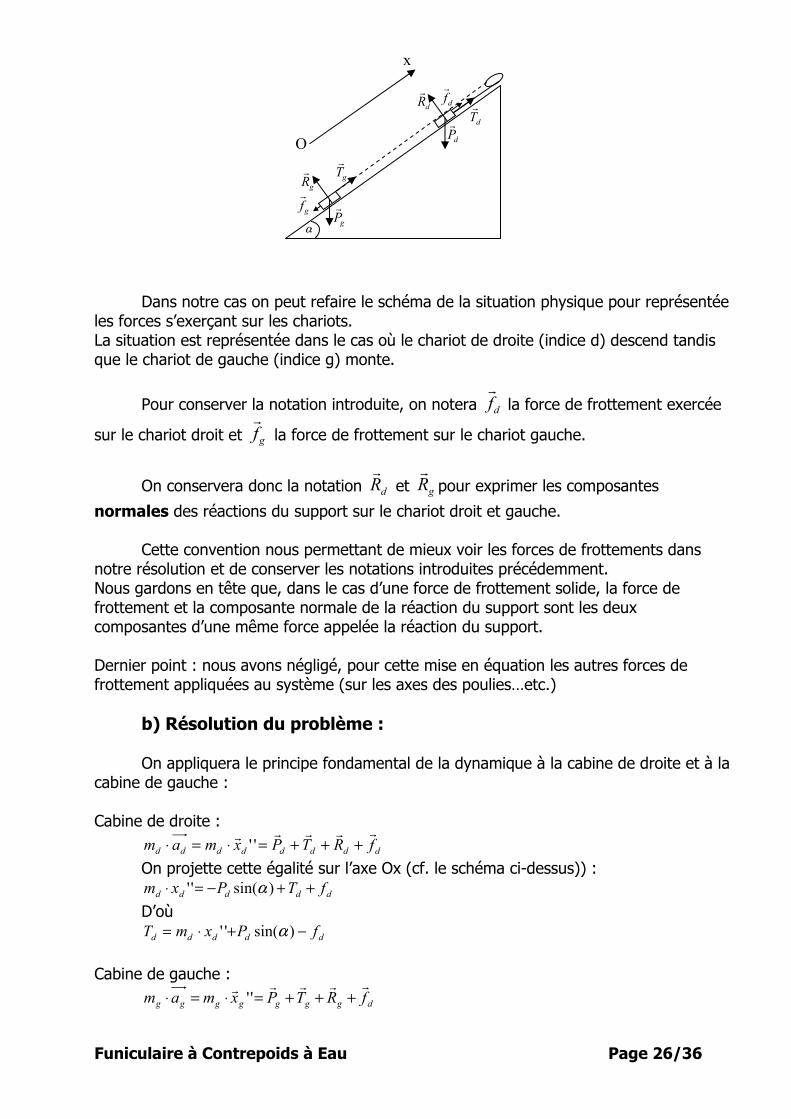
Funiculaire à Contrepoids à Eau Page 26/36
Dans notre cas on peut refaire le schéma de la situation physique pour représentée les forces s’exerçant sur les chariots. La situation est représentée dans le cas où le chariot de droite (indice d) descend tandis que le chariot de gauche (indice g) monte.
Pour conserver la notation introduite, on notera dfr
la force de frottement exercée
sur le chariot droit et gfr
la force de frottement sur le chariot gauche.
On conservera donc la notation dRr et gR
r
pour exprimer les composantes
normales des réactions du support sur le chariot droit et gauche.
Cette convention nous permettant de mieux voir les forces de frottements dans notre résolution et de conserver les notations introduites précédemment. Nous gardons en tête que, dans le cas d’une force de frottement solide, la force de frottement et la composante normale de la réaction du support sont les deux composantes d’une même force appelée la réaction du support. Dernier point : nous avons négligé, pour cette mise en équation les autres forces de frottement appliquées au système (sur les axes des poulies…etc.)
b) Résolution du problème :
On appliquera le principe fondamental de la dynamique à la cabine de droite et à la cabine de gauche : Cabine de droite :
dddddddd fRTPxmamrrrrr
+++=⋅=⋅ '' On projette cette égalité sur l’axe Ox (cf. le schéma ci-dessus)) :
ddddd fTPxm ++−=⋅ )sin('' α D’où
ddddd fPxmT −+⋅= )sin('' α Cabine de gauche :
dggggggg fRTPxmamrrrrr
+++=⋅=⋅ ''
gPr
dPr
gRr
dRr
gTr
dTr
α
O
x
dfr
gfr

Funiculaire à Contrepoids à Eau Page 27/36
On projette cette égalité sur l’axe Ox (cf. le schéma ci-dessus)) : ggggg fTPxm −+−=⋅ )sin('' α
D’où ggggg fPxmT ++⋅= )sin('' α
Comme le câble n’est pas étirable
Tg = Td , de plus '' dg xx −= et '''' dg xx −=
d’où : ggggdddd fPxmfPxm ++⋅=−+⋅ )sin('')sin('' αα
En notant gxx = , on arrive à :
gggddd fPxmfPxm ++⋅=−+⋅− )sin('')sin('' αα
gdgddg ffPPxmm −−−=⋅+ )sin().('')( α
D’où )()sin().('')( gdgddg ffPPxmm +−−=⋅+ α
Ainsi :
)(
)(
)(
)sin(.).(''
dg
gd
dg
gd
mm
ff
mm
gmmx
+
+−
+
−=
α
Donc, en choisissant l’origine des temps le moment où les cabines débutent leurs mouvements ( 0)0(')0(')0(' ==−==== txtxtx dg ), on arrive à :
tmm
ff
mm
gmmx
dg
gd
dg
gd .)(
)(
)(
)sin(.).('
+
+−
+
−=
α
Funiculaire à Contrepoids à Eau Page 28/36
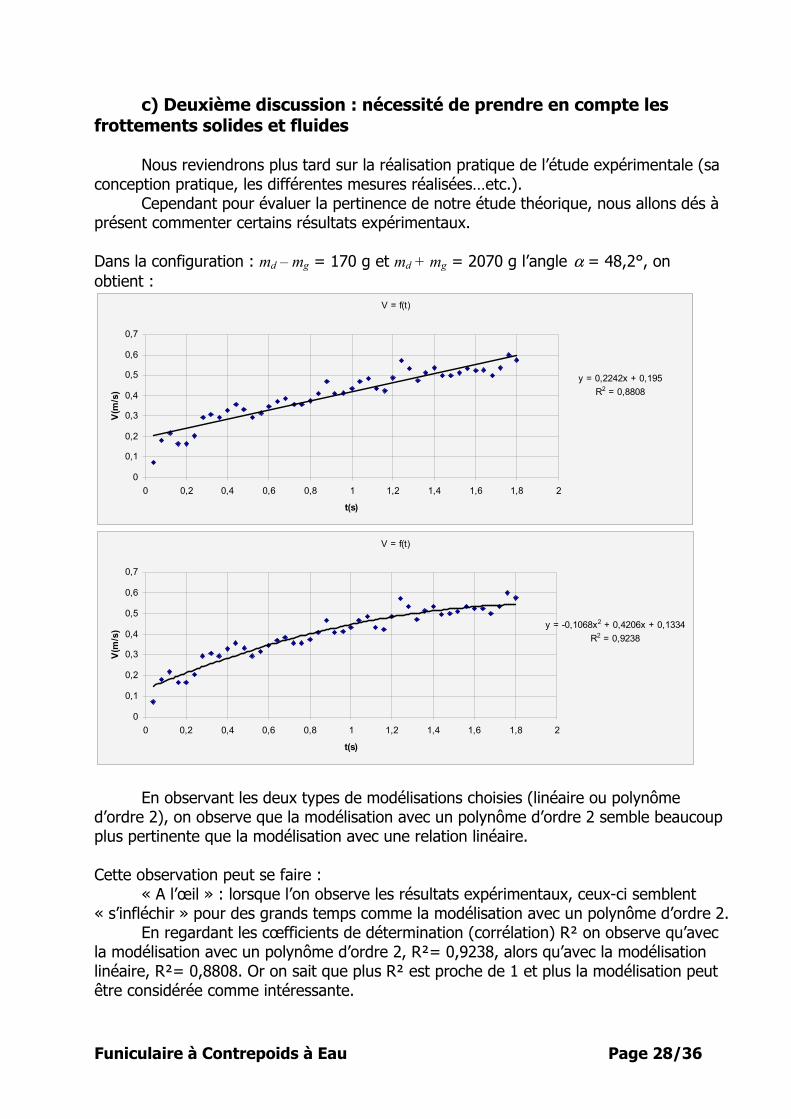
c) Deuxième discussion : nécessité de prendre en compte les frottements solides et fluides
Nous reviendrons plus tard sur la réalisation pratique de l’étude expérimentale (sa conception pratique, les différentes mesures réalisées…etc.).
Cependant pour évaluer la pertinence de notre étude théorique, nous allons dés à présent commenter certains résultats expérimentaux. Dans la configuration : md – mg = 170 g et md + mg = 2070 g l’angle α = 48,2°, on obtient :
V = f(t)
y = 0,2242x + 0,195
R2 = 0,8808
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
t(s)
V(m/s)
V = f(t)
y = -0,1068x2 + 0,4206x + 0,1334
R2 = 0,9238
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0 0,2 0,4 0,6 0,8 1 1,2 1,4 1,6 1,8 2
t(s)
V(m/s)
En observant les deux types de modélisations choisies (linéaire ou polynôme d’ordre 2), on observe que la modélisation avec un polynôme d’ordre 2 semble beaucoup plus pertinente que la modélisation avec une relation linéaire. Cette observation peut se faire : « A l’œil » : lorsque l’on observe les résultats expérimentaux, ceux-ci semblent « s’infléchir » pour des grands temps comme la modélisation avec un polynôme d’ordre 2. En regardant les cœfficients de détermination (corrélation) R² on observe qu’avec la modélisation avec un polynôme d’ordre 2, R²= 0,9238, alors qu’avec la modélisation linéaire, R²= 0,8808. Or on sait que plus R² est proche de 1 et plus la modélisation peut être considérée comme intéressante.
Funiculaire à Contrepoids à Eau Page 29/36
En revenant à notre résultat théorique : tmm
ff
mm
gmmx
dg
gd
dg
gd .)(
)(
)(
)sin(.).('
+
+−
+
−=
α, on
s’aperçoit que si fd + fg est constante on obtiendrait une relation linéaire entre x’ et t ce qui est en désaccord avec notre discussion ci-dessus.
On peut donc en conclure qu’il nous faut considérer des forces de frottements qui ne soient pas constantes au cours du mouvement des chariots.
Cette dernière constatation exclue le fait de considérer que les forces de frottements solides.
d) Les forces de frottements : Nous allons prendre en compte les différents types de frottement : Force de frottement solide : d’après le loi de Coulomb (lorsque le corps est en mouvement)
fsolide = f.RN avec f : le coefficient de frottement cinétique fsolide = f.R (avec nos notations) ainsi, dans notre cas : fsolide =f.(md + mg).g.cos(α)
on trouve Rd = md.g.cos(α) et Rg = mg.g.cos(α) en appliquant le principe fondamentale de la dynamique.
Lorsque l’on projette les forces selon l’axe perpendiculaire à Ox, on obtient ces relations en disant que, selon cet axe, il n’y a pas de mouvement. Force de frottement fluide :
ffluide = γ.V = γ.x’ avec γ la constante de frottement fluide.
e) Résolution complète du problème : mise en équation En introduisant ces forces dans la relation obtenue précédemment :
'.)cos(..).()sin().('')( xgfmmPPxmm gdgddg γαα −+−−=⋅+
D’où
'.)cos(..)sin(..'' xmm
gfgmm
mmx
gdgd
gd
+−−
+
−=
γαα
Ou encore :
)cos(..)sin(..'.'' ααγ
gfgmm
mmx
mmx
gd
gd
gd
−+
−=
++
Qui peut se mettre sous la forme :
AxBx =+ '.''
avec gd mm
B+
=γ
et )cos(..)sin(.. αα gfgmm
mmA
gd
gd−
+
−=

Funiculaire à Contrepoids à Eau Page 30/36
f) Résolution complète du problème : résolution de l’équation
différentielle : AxBx =+ '.'' :
• Equation sans second membre :
0'.'' =+ xBx
L’équation caractéristique correspondante à cette équation différentielle est : r2 + B.r = 0
Le discriminant de ce trinôme est ∆ = B2 (>0) D’où r = 0 ou r = -B La solution générale de l’équation sans second membre est donc :
x = D.e-B.t + C avec D et C des constantes
• Solution particulière de l’équation différentielle avec second
membre AxBx =+ '.'' :
On choisie la solution la plus simple correspondant à x’’ = 0
B
AxAxBx =⇔=⇔= ''.0''
Ainsi EtB
Ax += . avec E une constante.
• Solution générale de l’équation différentielle avec second membre
AxBx =+ '.'' :
La solution générale est :
FeDtB
Ax tB ++= − ... avec F une constante (F = E+C)
Conditions initiales, détermination des constantes : On sait que à t = 0 : x = 0 et x’ = 0 A t = 0 : x = 0 FDFD −=⇔=+ 0 D’où
[ ]tBeFtB
Ax .1.. −−+=
A t = 0 : x’ = 0
Or tBeFBB
Ax ...' −+=
D’où 2
0.B
AFFB
B
A−=⇔=+
Ainsi

Funiculaire à Contrepoids à Eau Page 31/36
[ ]tBeB
At
B
Ax .
21.. −−−=
et [ ]tBeB
Ax .1.' −−=
avec gd mm
B+
=γ
et )cos(..)sin(.. αα gfgmm
mmA
gd
gd−
+
−=
• Discussion Une fois encore on observe que le résultat obtenu n’a pas la forme de notre
modélisation expérimentale (un polynôme d’ordre 2). Cependant si le temps t est faible devant la constante B on peut réaliser un
développement limité de e-B.t au deuxième ordre pour retrouver un polynôme d’ordre 2
• Développement limité de e-B.t au deuxième ordre :
2..12
2. tBtBe tB +−=−
On obtient pour x’ :
−=
2...'2
2 tBtBB
Ax
Soit 2..'2t
ABtAx −=
• En conclusion :
La résolution de l’équation différentielle
AxBx =+ '.'' avec gd mm
B+
=γ
et )cos(..)sin(.. αα gfgmm
mmA
gd
gd−
+
−=
En faisant un développement limité au deuxième ordre de la solution, donne : 2.
2.' t
ABtAx −=
555... CCCooommmpppaaarrraaaiiisssooonnn dddeeesss rrrééésssuuullltttaaatttsss eeexxxpppééérrriiimmmeeennntttaaauuuxxx eeettt dddeee lll’’’ééétttuuudddeee
ttthhhéééooorrriiiqqquuueee a) Le choix de l’étude de x’
Nous avons fait le choix de nous intéresser à x’ car c’est une grandeur facilement
mesurable, qui représente à nos yeux correctement l’état du mouvement des chariots, et menant à moins d’imprécisions (expérimentales) que x’’.
b)Les calculs de constantes de frottement
Nous allons relier les résultats expérimentaux obtenus avec les grandeurs physiques introduites par les relations suivantes :
La solution théorique est 2.2
.' tAB
tAx −= avec
Funiculaire à Contrepoids à Eau Page 32/36
gd mmB
+=
γ et )cos(..)sin(.. αα gfg
mm
mmA
gd
gd−
+
−=
Ce qui nous permet d’écrire :
Agmm
mmgf
gd
gd−
+
−= )sin(..)cos(.. αα
D’où : )cos(.
)tan(.α
αg
A
mm
mmf
gd
gd−
+
−=
Et ).( gd mmB +=γ
c) Les résultats expérimentaux :
Voici un tableau synthétisant les différents résultats expérimentaux obtenus, ainsi
que les résultats des calculs des coefficients de frottements (on rappelle que la solution
théorique est 2.2
.' tAB
tAx −= )
Enregistrements md-mg (g) md+mg (g) modélisation x' = a.t-b.t²+c b A = a
Enregistrement 1 120 2020 y = -0,0761x2 + 0,2714x + 0,1075 0,0761 0,2714
Enregistrement 2 170 2070 y = -0,1068x2 + 0,4206x + 0,1334 0,1068 0,4206
Enregistrement 4 220 2120 y = -0,1314x2 + 0,5824x + 0,0786 0,1314 0,5824
Enregistrement 5 270 2170 y = -0,2286x2 + 0,8437x + 0,0523 0,2286 0,8437
Enregistrement 6 320 2220 y = -0,2577x2 + 0,9829x + 0,0788 0,2577 0,9829
Enregistrement 7 370 2270 y = -0,2288x2 + 1,0186x + 0,1125 0,2288 1,0186
Enregistrements B = 2b/a )cos(.
)tan(.α
αg
A
mm
mmf
gd
gd−
+
−= ).( gd mmB +=γ R²
Enregistrement 1 0,56079587 2,4935E-02 1,132807664 0,8259
Enregistrement 2 0,50784593 2,7528E-02 1,051241084 0,9238
Enregistrement 4 0,45123626 2,6995E-02 0,956620879 0,9697
Enregistrement 5 0,54189878 1,0129E-02 1,175920351 0,9702
Enregistrement 6 0,52436667 1,0896E-02 1,164094008 0,986
Enregistrement 7 0,44924406 2,6520E-02 1,019784017 0,9788
d) Discussion sur les résultats expérimentaux :
• Le coefficient de frottement solide :
Ce coefficient de frottement solide, intervenant dans la loi de Coulomb, dépend
uniquement de la nature des solides en contact. Ce coefficient ne dépend donc pas, a priori, de l’état de mouvement du solide.
Nos résultats expérimentaux semblent être en accord avec ce fait.
Funiculaire à Contrepoids à Eau Page 33/36
En effet, comme le montre le tableau ci-dessous, la valeur calculée est du même ordre pour tous les enregistrements réalisés (avec une différence notable pour l’enregistrement 5 et 6) :
Enregistrements md-mg (g) md+mg (g) )cos(.)tan(.
αα
g
A
mm
mmf
gd
gd−
+
−=
Enregistrement 1 120 2020 2,4935E-02
Enregistrement 2 170 2070 2,7528E-02
Enregistrement 4 220 2120 2,6995E-02
Enregistrement 5 270 2170 1,0129E-02
Enregistrement 6 320 2220 1,0896E-02
Enregistrement 7 370 2270 2,6520E-02
Un deuxième argument semble confirmer la validité des nos mesures. En partant des chariots immobiles, nous avons mesuré la différence de masse
minimum pour qu’il y ait mise en mouvement du système : md – mg = 70g avec md + mg =1970 g
Cette mesure nous permet d’avoir une idée de la valeur du coefficient de frottement
statique sf de notre système (le rapport N
T
R
Rmaximum en dessous duquel le mouvement
est impossible).
)tan(. αgd
gd
smm
mmf
+
−=
Dans notre cas : 210.0,4 −=sf La loi de Coulomb sur le frottement prévoit que le coefficient de frottement
statique sf est du même ordre que le coefficient de frottement cinétique f tout en lui
étant supérieur ( sf > f ).
Nos résultats semblent donc en accord avec cette loi de Coulomb.
• Le coefficient de frottement fluide :
Ce coefficient de frottement fluide de la nature du fluide qui entoure le solide, et de la forme du solide. Ce coefficient ne dépend donc pas, a priori, de l’état de mouvement du solide.
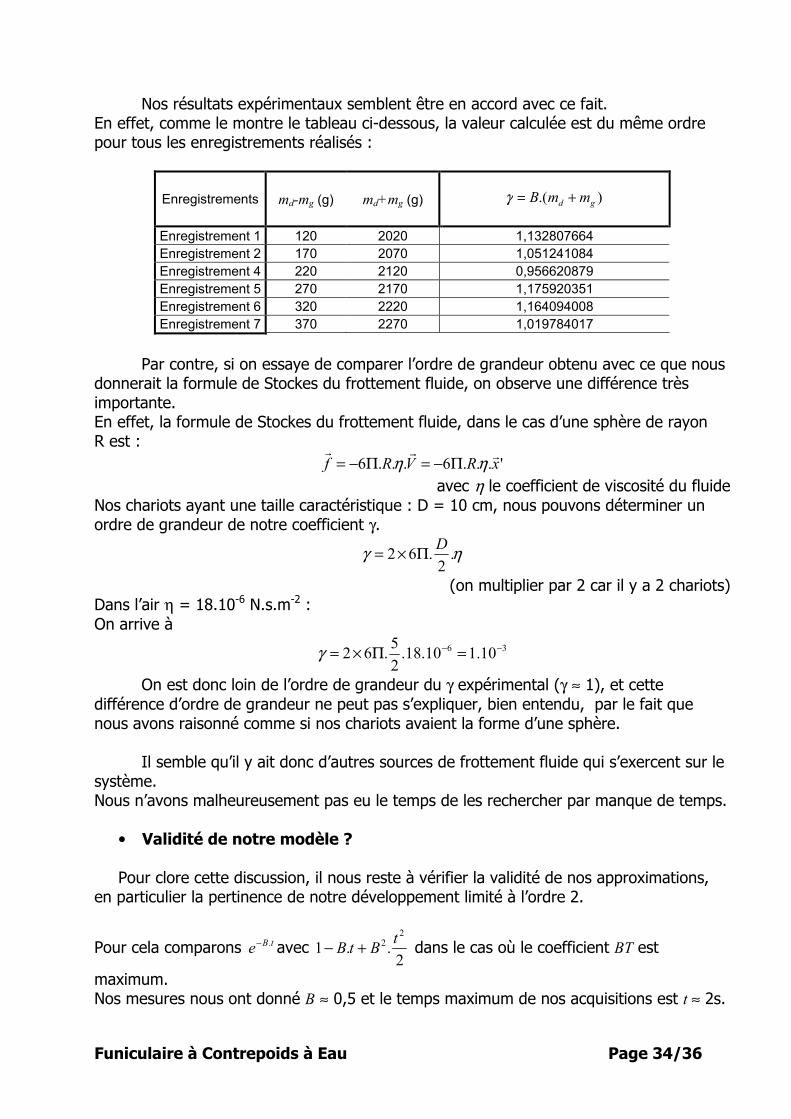
Funiculaire à Contrepoids à Eau Page 34/36
Nos résultats expérimentaux semblent être en accord avec ce fait. En effet, comme le montre le tableau ci-dessous, la valeur calculée est du même ordre pour tous les enregistrements réalisés :
Enregistrements md-mg (g) md+mg (g) ).( gd mmB +=γ
Enregistrement 1 120 2020 1,132807664
Enregistrement 2 170 2070 1,051241084
Enregistrement 4 220 2120 0,956620879
Enregistrement 5 270 2170 1,175920351
Enregistrement 6 320 2220 1,164094008
Enregistrement 7 370 2270 1,019784017
Par contre, si on essaye de comparer l’ordre de grandeur obtenu avec ce que nous donnerait la formule de Stockes du frottement fluide, on observe une différence très importante. En effet, la formule de Stockes du frottement fluide, dans le cas d’une sphère de rayon R est :
'...6...6 xRVRfrrr
ηη Π−=Π−= avec η le coefficient de viscosité du fluide
Nos chariots ayant une taille caractéristique : D = 10 cm, nous pouvons déterminer un ordre de grandeur de notre coefficient γ.
ηγ .2.62D
Π×=
(on multiplier par 2 car il y a 2 chariots) Dans l’air η = 18.10-6 N.s.m-2 : On arrive à
36 10.110.18.2
5.62 −− =Π×=γ
On est donc loin de l’ordre de grandeur du γ expérimental (γ ≈ 1), et cette différence d’ordre de grandeur ne peut pas s’expliquer, bien entendu, par le fait que nous avons raisonné comme si nos chariots avaient la forme d’une sphère. Il semble qu’il y ait donc d’autres sources de frottement fluide qui s’exercent sur le système. Nous n’avons malheureusement pas eu le temps de les rechercher par manque de temps.
• Validité de notre modèle ?
Pour clore cette discussion, il nous reste à vérifier la validité de nos approximations, en particulier la pertinence de notre développement limité à l’ordre 2.
Pour cela comparons tBe .− avec 2..1
22 tBtB +− dans le cas où le coefficient BT est
maximum. Nos mesures nous ont donné B ≈ 0,5 et le temps maximum de nos acquisitions est t ≈ 2s.
Funiculaire à Contrepoids à Eau Page 35/36
On peut donc calculer l’écart relatif entre tBe .− et 2..12
2 tBtB +− pour Bt = 1 :
%272
111
2..1
1
1
.
22.
=
+−−
=
+−−
−
−
−
−
ttB
tB
e
e
e
tBtBe
Ce qui reste correct (par exemple pour l’enregistrement 7 le temps maximum de nos acquisitions est t ≈ 1 s, ce qui nous amène à un écart relatif égal à 3 %).
666... EEExxxpppllliiicccaaatttiiiooonnn dddeeesss ppprrriiissseeesss dddeee mmmeeesssuuurrreeesss
Pour comparer notre funiculaire avec la théorie (étude dynamique), nous avons réalisé une expérience. Pour cela, nous avons filmé les mouvements des cabines pour différentes masses et ensuite nous avons exploité ces vidéos à l’aide du logiciel « avimeca ». Nous avons pointé
le déplacement de la cabine droite (descendante) tout les ème
14
1 de seconde afin d’obtenir
des mesures très précises.
Funiculaire à Contrepoids à Eau Page 36/36
VIII. Conclusion
111... SSSuuurrr llleee ppprrrooojjjeeettt
Ce projet a contribué à l’enrichissement de nos connaissances dans le domaine scientifique. Il nous a permis de nous projeter dans l’avenir en utilisant une démarche d’ingénieur. Nos recherches individuelles ou effectuées en groupe nous ont permis de résoudre divers problèmes. Nous avons réussi à être complémentaires afin de mener à bien notre projet.
222... SSSooouuurrrccceeesss
http://www.funimag.com/funimag19/CAT01FR.htm (site dédié aux funiculaires) http://www.funimag.com/funimag19/Lynton01FR.htm(site dédié aux funiculaires) http://fr.wikipedia.org/wiki/Funiculaire (définition d’une encyclopédie) http://www.funiculaire.fr/ (site du funiculaire de St Hilaire de Touvet)
333... LLLooogggiiiccciiieeelllsss uuutttiiillliiisssééésss
• Windows • Solidworks® (modélisation mécanique) • Workbench (schématisation électronique) • TCI (schematisation de typon pour les circuits imprimes) • SDS (schematisation électronique et électrique) • PICBASIC Studio (conception de programme) • Avimeca (pointage d’un objet)
444... RRReeemmmeeerrrccciiieeemmmeeennntttsss
• M. Pinault et M. Vallon : professeurs de Sciences de l’Ingénieur, pour leurs
explications et leurs conseils. • M. Errami : professeur de physique-chimie, pour son aide, son soutien et
l’organisation. • M. Jaubert Ludovic et M. Duffait Roger : chercheurs, pour leurs aides. • M. Bruno : professeur de physique-chimie, pour son aide pour les expériences. • L’Organisation des Olympiades de Physique. • Le Lycée René Cassin, pour son soutien général. • Nos partenaires. • Le funiculaire de St Hilaire du Touvet. • Usine de Métallurgie.







