Download - Introductiom to Robotic Systems

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 1/38
1
What is a Robot?
Definition of Robot
1. Webster:
“An automatic apparatus or device that performs
functions ordinarily ascribed to human beings or
operates with what appears to be almost humanintelligence”
2. Robot Institute of America
“A robot is a re-programmable, multifunctionalmanipulator designed to move material, parts, tools
or specialized devices through variable programmed
motions for the performance of variety of tasks”

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 2/38
2
• Mechanical Engineering
•Design of the mechanism.Understanding of the kinematics
and
dynamics of the system.
• Electronic Engineering
•Design of the actuator and sensor systems.
• Systems Engineering
• Analysis and integration of the overall system. Signal
conditioning and Control.
• Computer Science
•Design of the logic, intelligence or adaptability, networking
Technologies that go to make up a robot

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 3/38
3
Robot Characteristics
1. The following definition are used to
characterized robot specification
i. Payloadii. Reach
iii. Precession
iv. Repeatability
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 4/38
4
•Payload is the weight a robot can carry and still
remain within its other specifications
•E.g. A robot maximum load capacity may be
much larger than its specified payload, but at
maximum level it may become less accurate, may
not follow its intended path accurately, or mayhave excessive deflections
Payload
Robot Characteristics (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 5/38
5
Reach
•Maximum distance a robot can reach within its
work envelope
Precision (validity)
•Defined as how accurately a specified point
can be reached.
•Most industrial robot can have precision of
0.001 inch or better
Robot Characteristics (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 6/38
6
Repeatability (variability)
•Repeatability is how accurate the same position can be
reached of the motion repeated many times.
•Repeatability is more important than precision
•If a robot is not precise, it will generally show a
consistent error, which can be predicted and thus
corrected using programming.
•If the error is random, it cannot be predicted and thus
cannot be eliminated.
•Most industrial robots have repeatability in the 0.001
inch range
Robot Characteristics (cont)
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 7/38
7
Advantages & Disadvantages of Robots
Advantages
•Robotics and automation can, in many situations increase
productivity, safety,efficiency, quality and consistency of
product
•Robot can work in hazardous environments without the
need of life support, comfort or concern about safety
•Robot needs no environmental comfort, such as lightning,
air conditioning, ventilation and noise protection
•Robots work continuously without experiencing fatigue or
boredom, do not get mad, do not have hangovers and need
medical insurance or vacation

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 8/38
8
Advantages & Disadvantages of Robots
(cont)
Advantages
•Robots have repeatable precision at all times, unless
something happens to them or unless wear out
•Robots can be much more accurate than human. E.g. New
wafer handling robots have micro inch accuracies
•Accessories and sensor can have capabilities beyond
humans
•Can process multiple stimuli or tasks simultaneously.
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 9/38
9
Advantages & Disadvantages of Robots
(cont)
Disadvantages
•Robots replace human workers creating economic
problems. E.g. lost salaries, social problems (dissatisfactionand resentment among workers)
•Robots lack capability to respond in emergencies, unless
the situation is predicted and the response is included in the
system. Safety measures are needed to ensure that they donot injured operators and machine working with them

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 10/38
10
Advantages & Disadvantages of Robots
(cont)
Disadvantages
•This includes:
•Inappropriate or wring responses
•A lack of decision making power
•A loss of power
•Damage to the robot and other devices
•Human injuries

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 11/38
11
Advantages & Disadvantages of Robots
(cont)
Disadvantages
•Robots have limited capabilities in
•Degree of freedom
•Dexterity
•Sensors
•Vision systems
•Real time response

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 12/38
12
Advantages & Disadvantages of Robots
(cont)
Disadvantages
•Robots are costly due to
•Initial cost of equipment
•Installation cost
• Need of peripherals
• Need for training
• Need for programming

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 13/38
13
Robot Components
• A Robot as a system consists of the following elementswhich are integrated together to form a whole:
i. Manipulator (or rover)
ii. End effectorsiii. Actuators
iv. Sensors
v. Controller vi. Processor
vii. Software

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 14/38
14
Robot Components (cont)
• Is the main body of the robot and consists of links, the
joints and other structural elements
Manipulator
• The part that is connected to the last joint (hand) of a
manipulator.
• In most cases the action of the end effector is either
controlled by the robot’s controller or the controller
communicates with the end effector’s controlling device
such as (e.g. PLC)
End Effectors
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 15/38
15
Robot Components (cont)
• Are the “muscles” of the manipulator that move or
create mechanical action
• Common types
• Servomotors – power driven mechanism that help
main controller operates using low force
• Stepper motors – a rotating motor in a small step
and not continuous• Pneumatic cylinders – relating to air or other gases
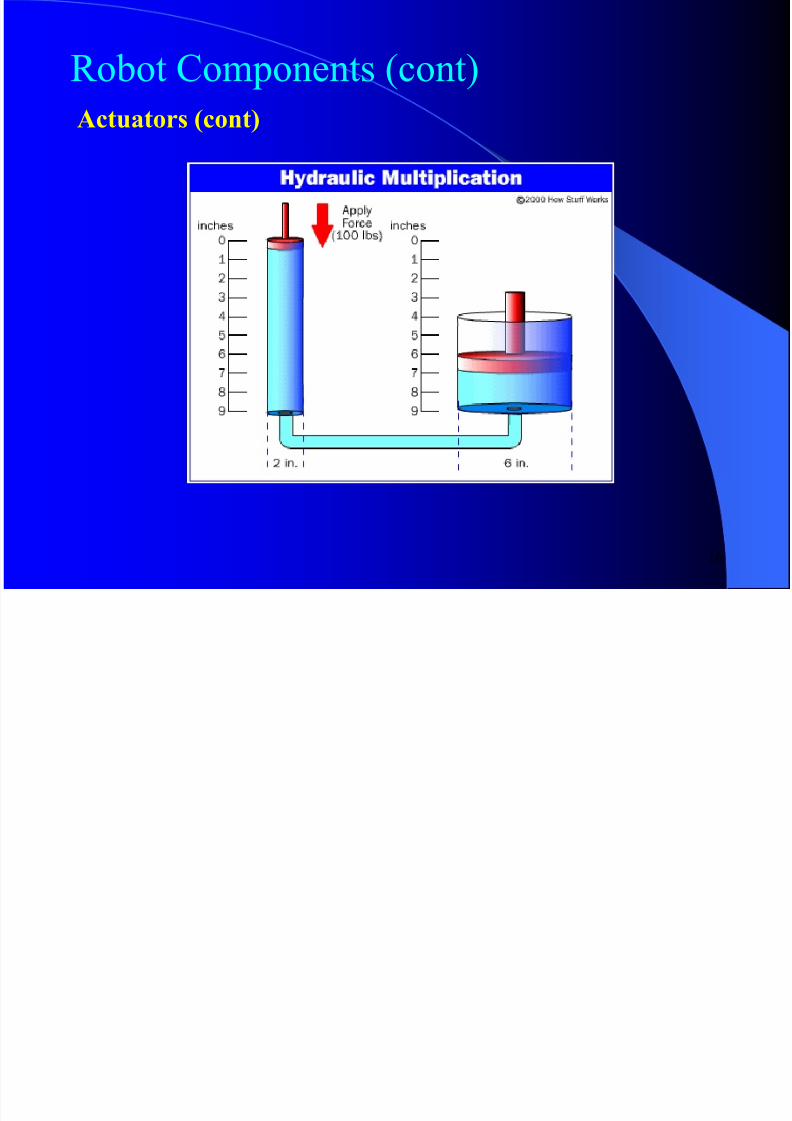
• Hydraulic cylinders – moved by, or operated by a
fluid, especially water, under pressure.
Actuators
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 16/38
16
Actuators (cont)
Robot Components (cont)
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 17/38
17
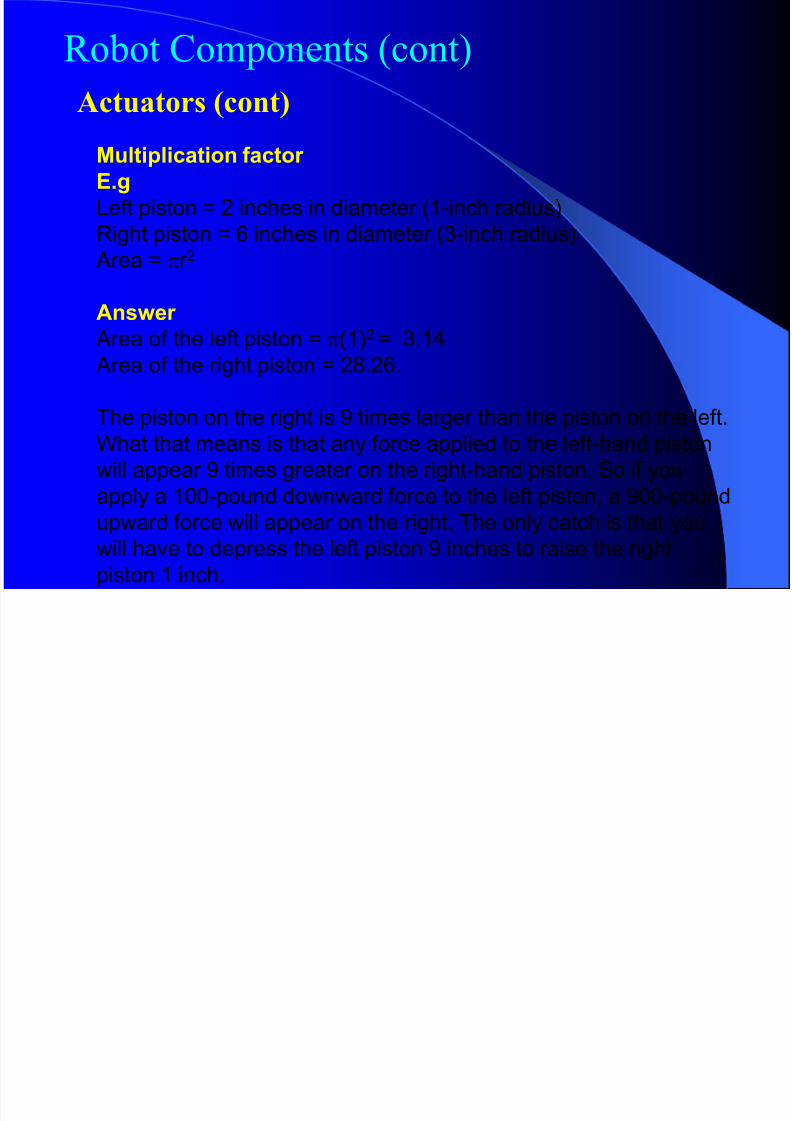
Multiplication factor
E.g
Left piston = 2 inches in diameter (1-inch radius)
Right piston = 6 inches in diameter (3-inch radius)
Area = r 2
Answer
Area of the left piston = (1)2 = 3.14
Area of the right piston = 28.26.
The piston on the right is 9 times larger than the piston on the left.What that means is that any force applied to the left-hand piston
will appear 9 times greater on the right-hand piston. So if you
apply a 100-pound downward force to the left piston, a 900-pound
upward force will appear on the right. The only catch is that you
will have to depress the left piston 9 inches to raise the rightpiston 1 inch.
Actuators (cont)
Robot Components (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 18/38
18
Robot Components (cont)
• Sensors are used to collect information about the
internal state if the robot to communicate with outside
environment
• E.g. Vision system, speech, and touch/tactile
Sensors
• Similar to cerebellum (controls motions)
• Receive data from computer, control actuators motions
and coordinates the motions with the sensory feedback
information
• E.g. Controls angle, velocity, force
Controller

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 19/38
19
Robot Components (cont)
• The brain
• Generally a computer but dedicated to a single purpose
• E.g. Calculates motions, how much/fast joint must move
Processor
• Three group of software
• Operating system
• Robotic software – calculates necessary motions of
each joint based on kinematics equations
• Collection of routines and application programs – to
use peripheral devices (e.g. vision routines, specific
task)
Software

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 20/38
20
Types of Robot – Function & Application
• Japanese Industrial Robot Association (JIRA)
• Class 1: Manual Handling Device: A device with
multiple DOF that is actuated by an operator
• Class 2: Fixed-Sequence Robot: A device that performs the successive stages if a task according to
predetermined, unchanging method and is hard to
modify
• Class 3: Variable –
Sequence Robot: Same as 2 buteasy to modify
• Class 4: Playback Robot: A human operator
performs the task manually and records the motions
for later playback. The robot repeats.
Classification of Robot

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 21/38
21
Types of Robot – Function & Application
• Japanese Industrial Robot Association (JIRA)
• Class 5: Numerical Control Robot: The operator
supplies the robot with a movement program rather than teaching them manually
• Class 6: Intelligent Robot: Robot with means to
understand its environment and the ability to
successfully complete a task despite changes in thesurrounding.
Classification of Robot (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 22/38
22
Types of Robot – Function & Application
• Robotics Institute of America (RIA) only consider
class 3-6 as robots
• The Association Francaise de Robotique (AFR)
• Type A: Handling devices with manual control totelerobotics
• Type B: Automatic handling devices predetermined
cycles
• Type C: Programmable, servo controlled robot with
continuous point-to-point trajectories
• Type D: Same as type C, but with the capability to
acquire information from its environment
Classification of Robot (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 23/38
23
Types of Robot – Function & Application
Robot Application
•4D Application
•Dangerous
•Dirty
•Dull
•Difficult
•4A tasks
•Automation
•Augmentation
•Assistance
•Autonomous
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 24/38
24
Degree of Freedom (DOF)
• Six degree of freedom is needed to fully place the object
in space and also oriented it as desired (move & rotate
along x-, y- and z-axes)
• If fewer than six, the robot’s capabilities are limited
• E.g.
• Robot with three DOF can only move along x-, y-
and z-axes. No orientation can be specified (only
parallel to axes)
• Robot with five DOF capable of rotating about three
axes but only moving along x-, y-axes (not z-axes)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 25/38
25
Degree of Freedom (DOF) (cont)
• A system with seven degrees of freedom does not have
unique solution. There are infinite number of ways it can position a part and orientate it at desired location. There
must be additional decision making routine (for the
controller) that allows it to pick the fastest or shortest
path to the desired destination.
• Due to this which take much computing power and time
no seven DOF is used in industry
• Human arms have seven DOF. (Shoulder – 3 DOF,
Elbow – 1 DOF, wrist - 3 DOF)
• In robot end effectors never consider as on of DOF
• ½ DOF - if movement is not fully controlled (e.g only
can fully extended or retracted, can only at 0, 30, 60 or
90 degrees)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 26/38
26
Robot Coordinates
• Robot configurations for positioning the hand are asfollows:
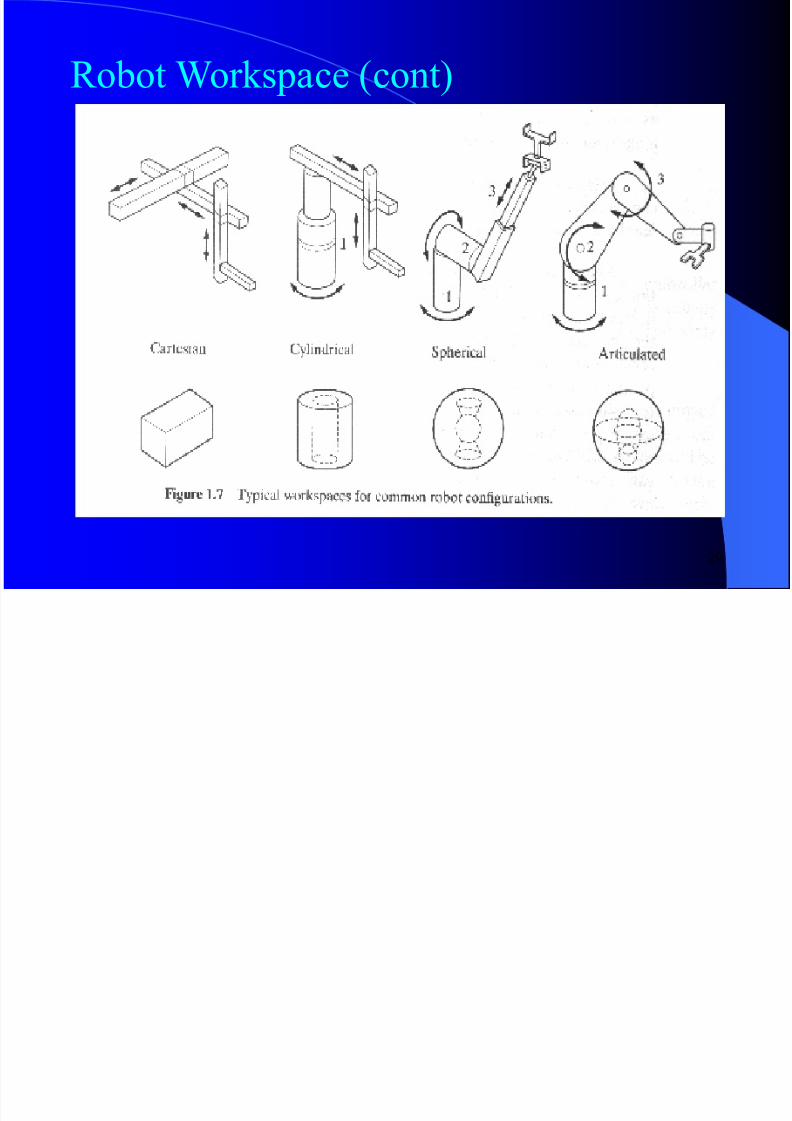
• Cartesian/rectangular/gantry (3P)
• Cylindrical (R2P)
• Spherical (2RP)
• Articulated/anthropomorphic (3R)
• Selective Compliance Assembly Robot Arm(SCARA)
P = Prismatic (linear), R = Revolute, S = Spherical

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 27/38
27
Robot Coordinates (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 28/38
28
Robot Workspace
• Robot workspace is the ability of a robot to reach a
collection of points (workspace) which depends on the
configuration and size of their links and wrist joint.
• The workspace may be found mathematically by writingequations that define the robot’s links and joints
including their limitations, such as ranges of motions for
each joint
• Alternatively can be found by subtracting all the space it
can reach with what it cannot reach.
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 29/38
29
Robot Workspace (cont)
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 30/38
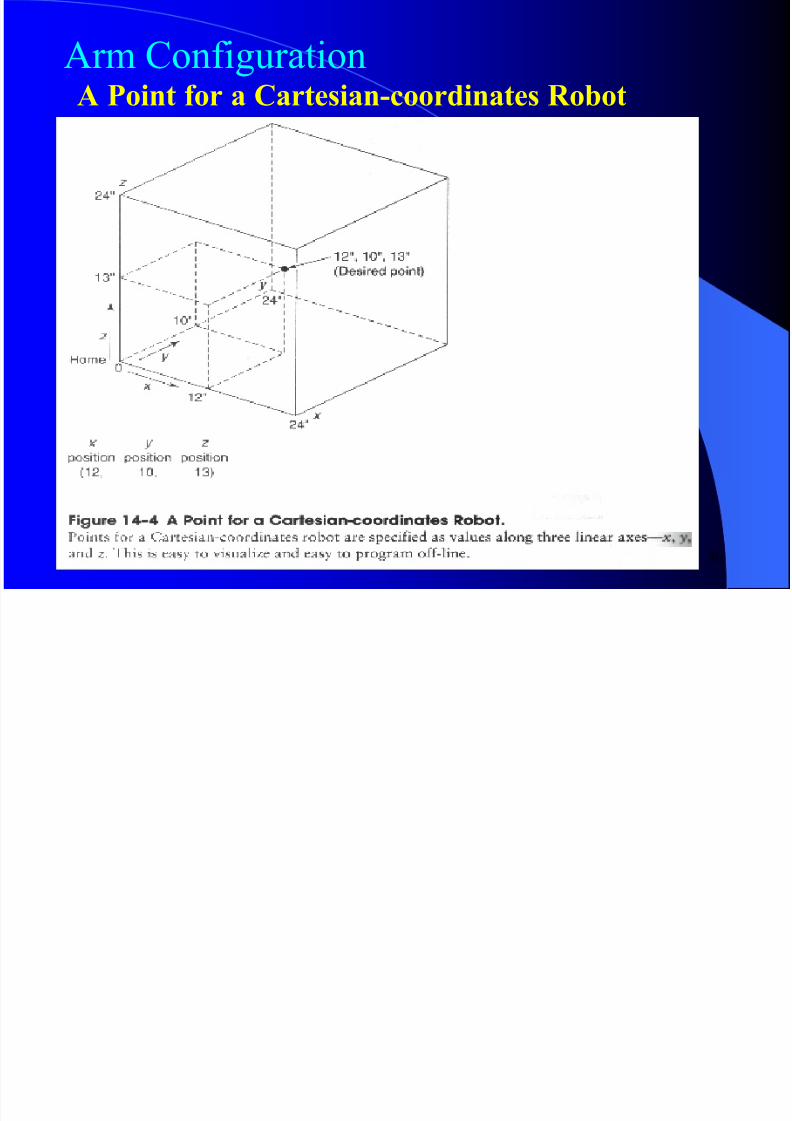
30
A Point for a Cartesian-coordinates Robot
Arm Configuration

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 31/38
31
Arm Configuration (cont)A Point for a Cylindrical-coordinates Robot
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 32/38
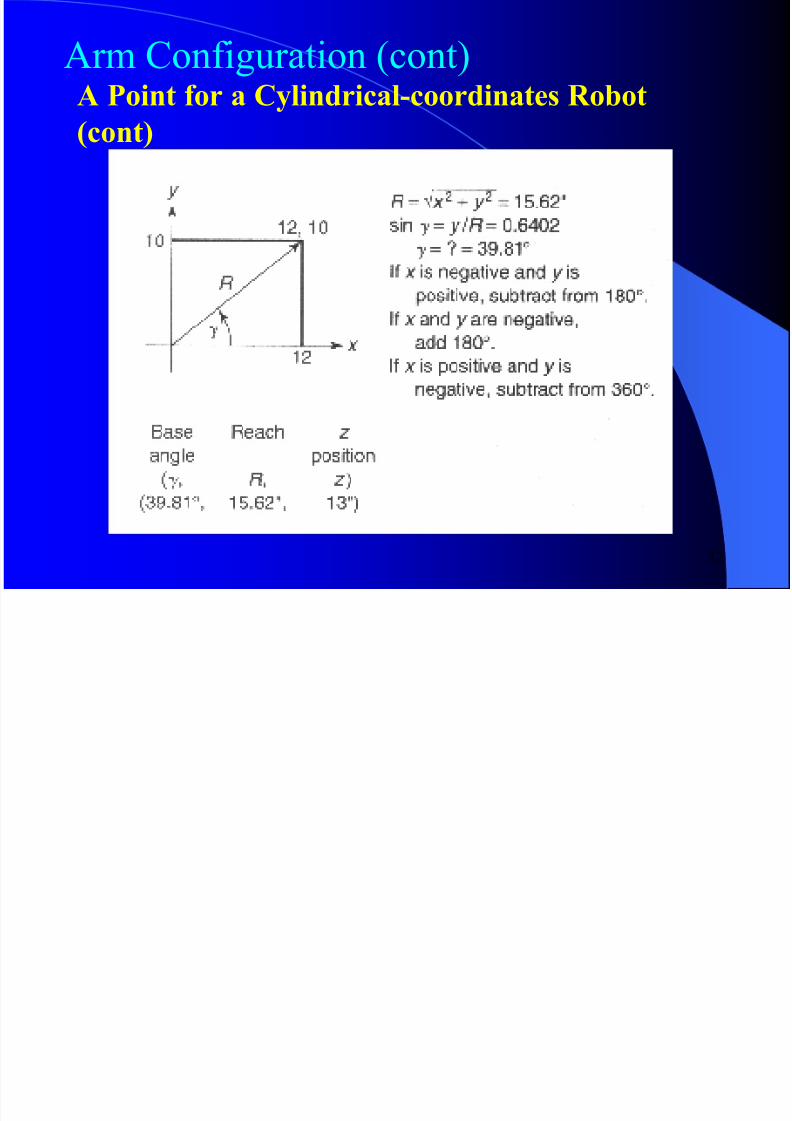
32
Arm Configuration (cont)A Point for a Cylindrical-coordinates Robot
(cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 33/38
33
Arm Configuration (cont)A Point for a SCARA Robot

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 34/38
34
Arm Configuration (cont)A Point for a SCARA Robot (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 35/38
35
Arm Configuration (cont)A Point for a Polar-coordinates Robot
7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 36/38
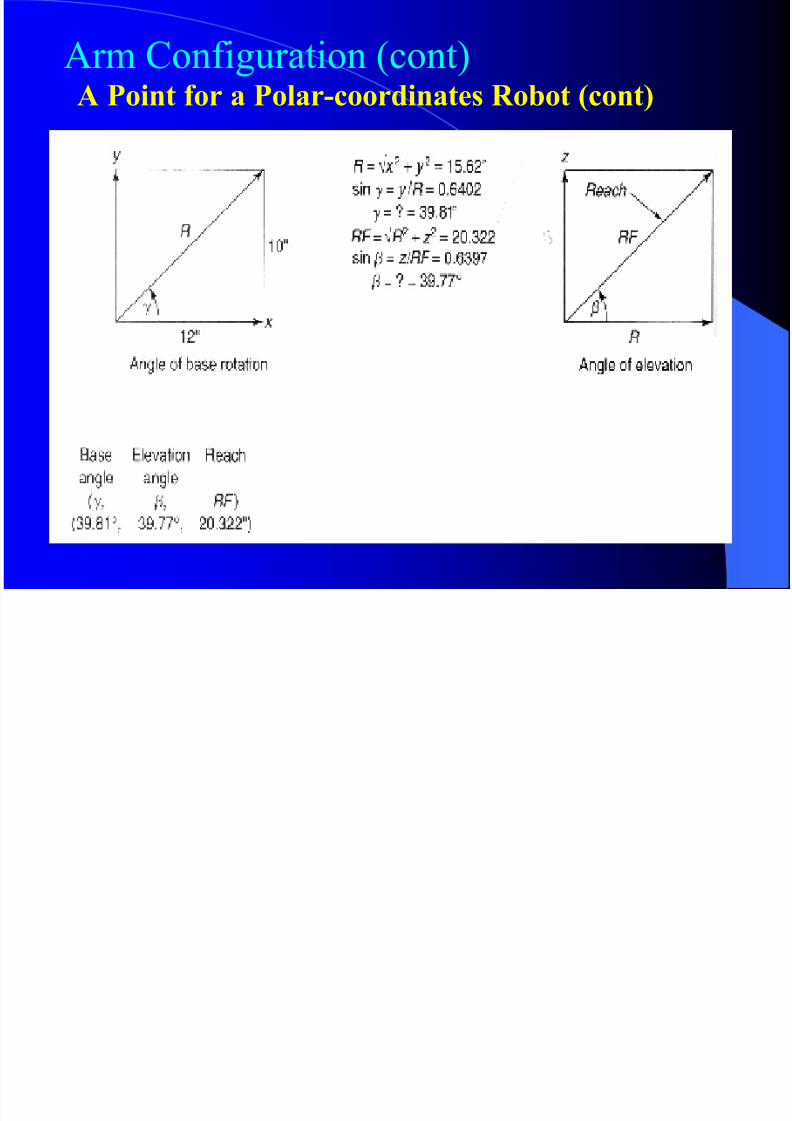
36
Arm Configuration (cont)A Point for a Polar-coordinates Robot (cont)

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 37/38
37
Arm Configuration (cont)A Point for a Jointed-arm Robot

7/29/2019 Introductiom to Robotic Systems
http://slidepdf.com/reader/full/introductiom-to-robotic-systems 38/38
38
Arm Configuration (cont)A Point for a Jointed-arm Robot (cont)







