
Introductory Control Theory


Control Theory
The use of feedback to regulate a signal
Controller
Plant
Desired signal xd
Signal x Control input u
Error e = x-xd
(By convention, xd = 0)x’ = f(x,u)

What might we be interested in?
Controls engineeringProduce a policy u(x,t), given a description of
the plant, that achieves good performance Verifying theoretical properties
Convergence, stability, optimality of a given policy u(x,t)

Agenda
PID control LTI multivariate systems & LQR control Nonlinear control & Lyapunov funcitons

PID control
Proportional-Integral-Derivative controller A workhorse of 1D control systems
Proportional term
u(t) = -Kp x(t) Negative sign assumes control acts in the
same direction as x
xt
Gain

Integral term
u(t) = -Kp x(t) - Ki I(t)
I(t) = 0t x(t) dt (accumulation of errors)
xt
Residual steady-state errors driven asymptotically to 0
Integral gain

Instability
For a 2nd order system (momentum), P control
xt
Divergence

Derivative term
u(t) = -Kp x(t) – Kd x’(t)
x
Derivative gain
Putting it all together
u(t) = -Kp x(t) - Ki I(t) + Kd x’(t)
I(t) = 0t x(t) dt
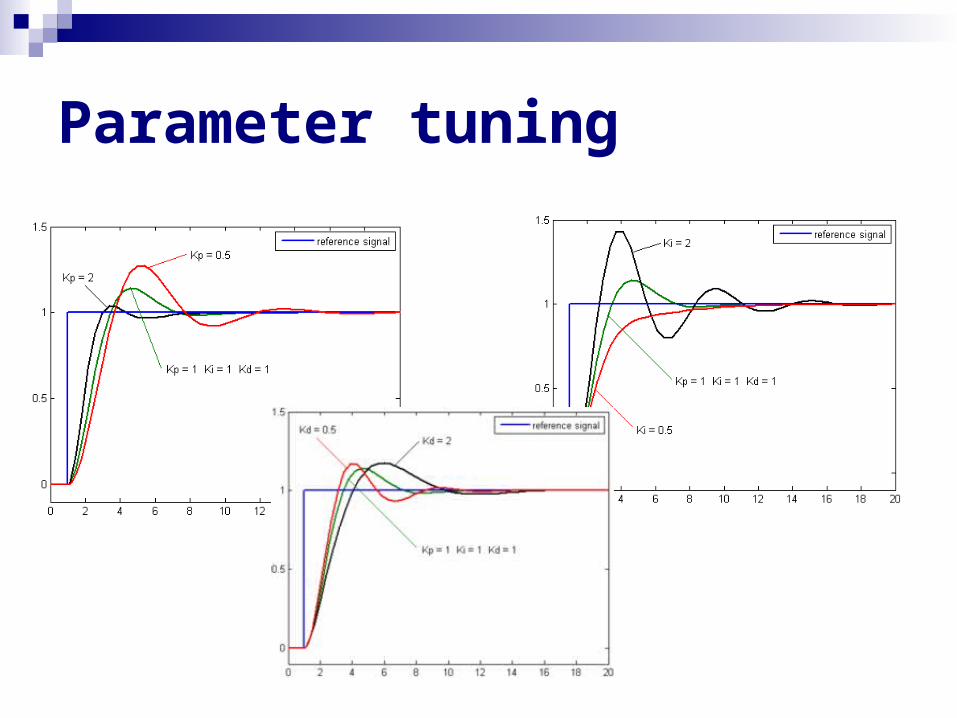
Parameter tuning

Example: Damped Harmonic Oscillator Second order time invariant linear system,
PID controllerx’’(t) = A x(t) + B x’(t) + C + D u(x,x’,t)
For what starting conditions, gains is this stable and convergent?
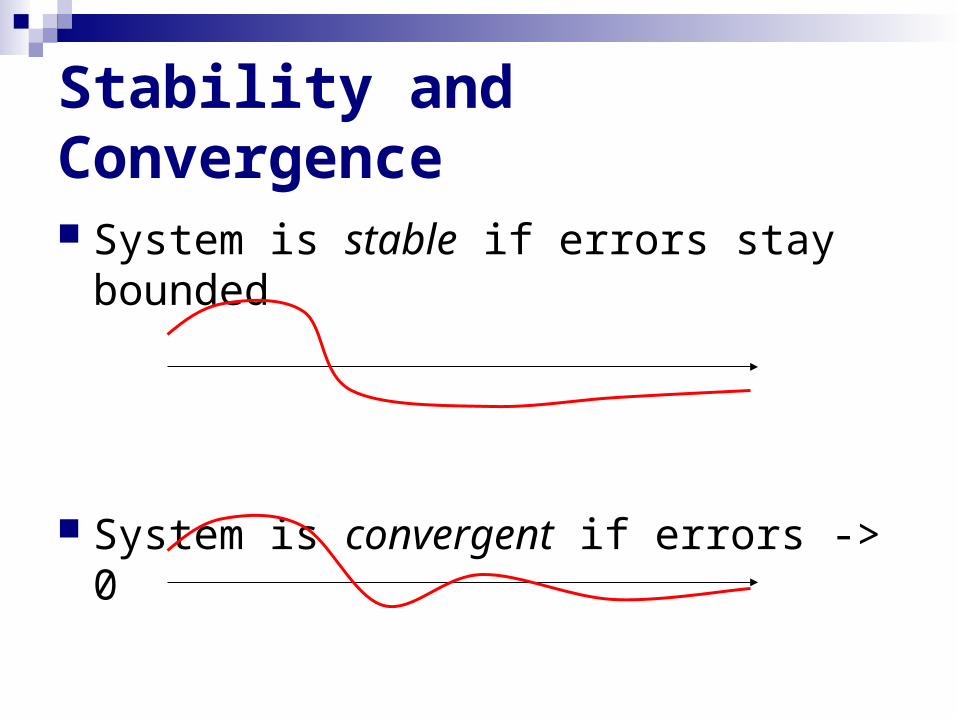
Stability and Convergence
System is stable if errors stay bounded
System is convergent if errors -> 0

Example: Damped Harmonic Oscillator x’’ = A x + B x’ + C + D u(x,x’) PID controller u = -Kp x –Kd x’ – Ki I
x’’ = (A-DKp) x + (B-DKd) x’ + C - D Ki I
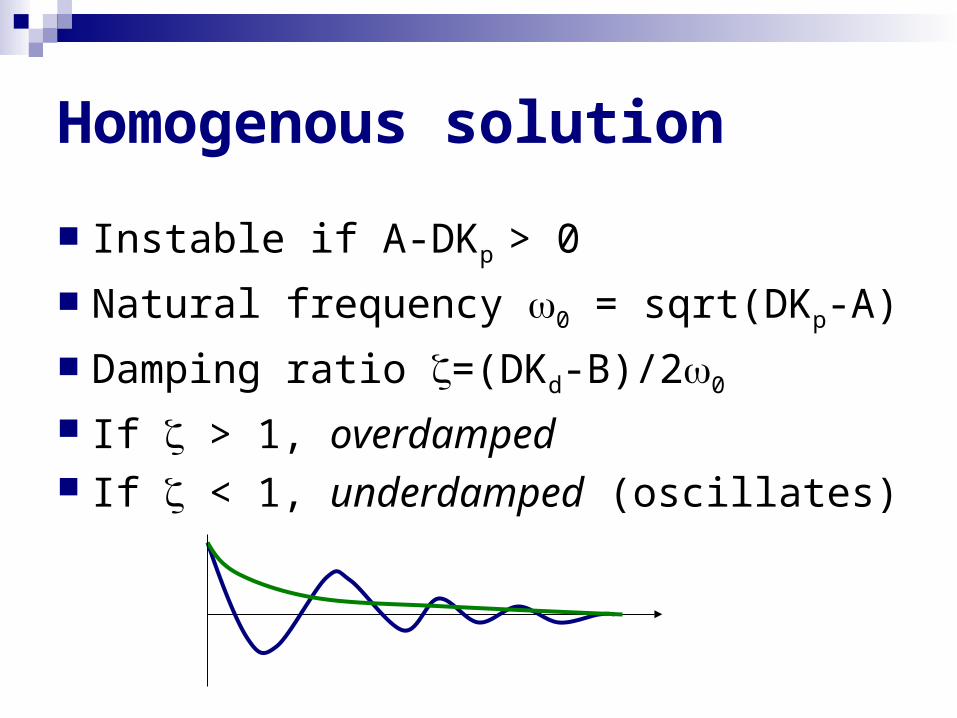
Homogenous solution
Instable if A-DKp > 0
Natural frequency 0 = sqrt(DKp-A)
Damping ratio =(DKd-B)/20
If > 1, overdamped If < 1, underdamped (oscillates)
Multivariate Systems
x’ = f(x,u) x X Rn u U Rm
Because m n, and variables are coupled, this is not as easy as setting n PID controllers

Linear Time-Invariant Systems
Linear: x’ = f(x,u,t) = A(t)x + B(t)u LTI: x’ = f(x,u) = Ax + Bu
Nonlinear systems can sometimes be approximated by linearization

Convergence of LTI systems
x’ = A x + B u Let u = - K x
Then x’ = (A-BK) x
The eigenvalues i of (A-BK) determine convergenceEach i may be complex
Must have real component between (-∞,0]
Linear Quadratic Regulator
x’ = Ax + Bu Objective: minimize quadratic cost
xTQ x + uTR u dt
Over an infinite horizon
Error term “Effort” penalization
Closed form LQR solution
Closed form solutionu = -K x, with K = R-1BP
Where P solves the Riccati equationATP + PA – PBR-1BTP + Q = 0Derivation: calculus of variations

Solving Riccati equation
Solve for P inATP + PA – PBR-1BTP + Q = 0
Existing iterative techniques, e.g. in Matlab

Nonlinear Control
x’ = f(x,u) How to find u?
Next class How to prove convergence and stability?
Hard to do across X

Proving convergence & stability with Lyapunov functions Let u = u(x) Then x’ = f(x,u) = g(x) Conjecture a Lyapunov function V(x)
V(x) = 0 at origin x=0V(x) > 0 for all x in a neighborhood of origin
V(x)

Proving stability with Lyapunov functions Idea: prove that d/dt V(x) 0 under the
dynamics x’ = g(x) around origin
V(x)t g(x)
t d/dt V(x)

Proving convergence with Lyapunov functions Idea: prove that d/dt V(x) < 0 under the
dynamics x’ = g(x) around origin
V(x)t g(x)
t d/dt V(x)

Proving convergence with Lyapunov functions d/dt V(x) = dV/dx(x) dx/dt(x)
= V(x)T g(x) < 0
V(x)t g(x)
t d/dt V(x)
How does one construct a suitable Lyapunov function? It may not be easy… Typically some form of energy (e.g., KE +
PE)

Handling Uncertainty
All the controllers we have discussed react to disturbances
Some systems may require anticipating disturbances
To be continued…

Motion Planning and Control
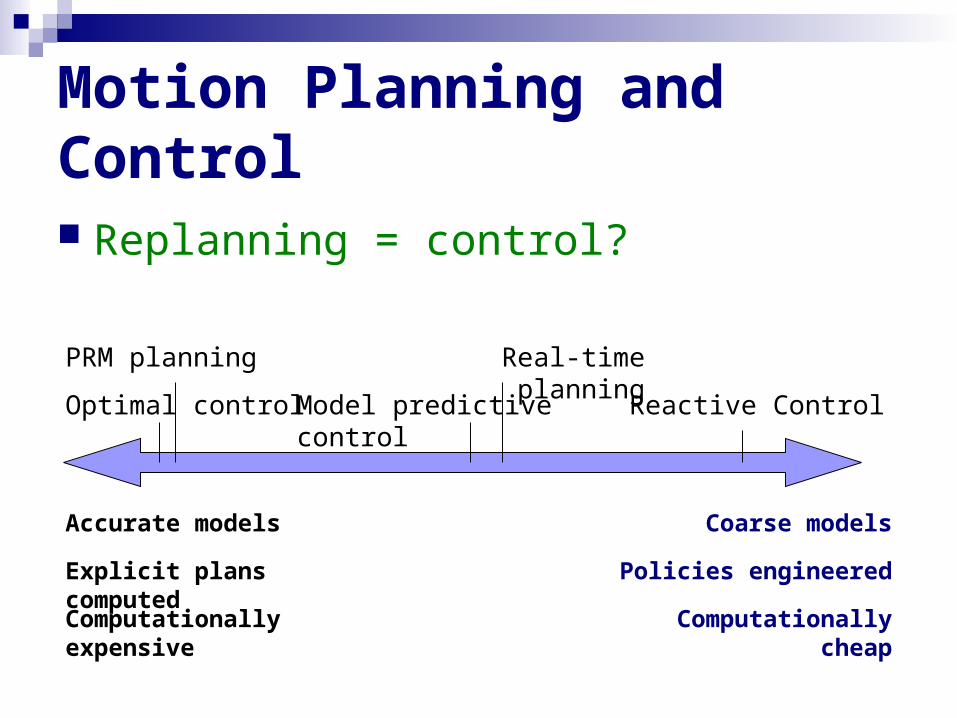
Replanning = control?
Motion Planning and Control
Replanning = control?
PRM planning
Reactive Control
Accurate models
Explicit plans computed
Computationally expensive
Coarse models
Policies engineered
Computationally cheap
Optimal control
Real-time planning
Model predictive control
Planning or control?
The following distinctions are more important:Tolerates disturbances and modeling errors? Convergent?Optimal?Scalable? Inexpensive?

Presentation Schedule
Optimal Control, 3/30 Ye and Adrija
Operational space and force control, 4/1 Yajia and Jingru
Learning from demonstration, 4/6 Yang, Roland, and Damien
Planning under uncertainty, 4/8 You Wei and Changsi
Sensorless planning, 4/13 Santhosh and Yohanand
Planning to sense, 4/15 Ziaan and Yubin







