p.2La modulationde largeurd’impulsions(PWM)
p.4Le contrôle vectoriel de tension :contrôle E/F
p.5Le contrôle vectoriel de fluxpour moteur asynchrone
p.10Les diagrammesd’essais
p.13ApplicationsChoix des loisde commande
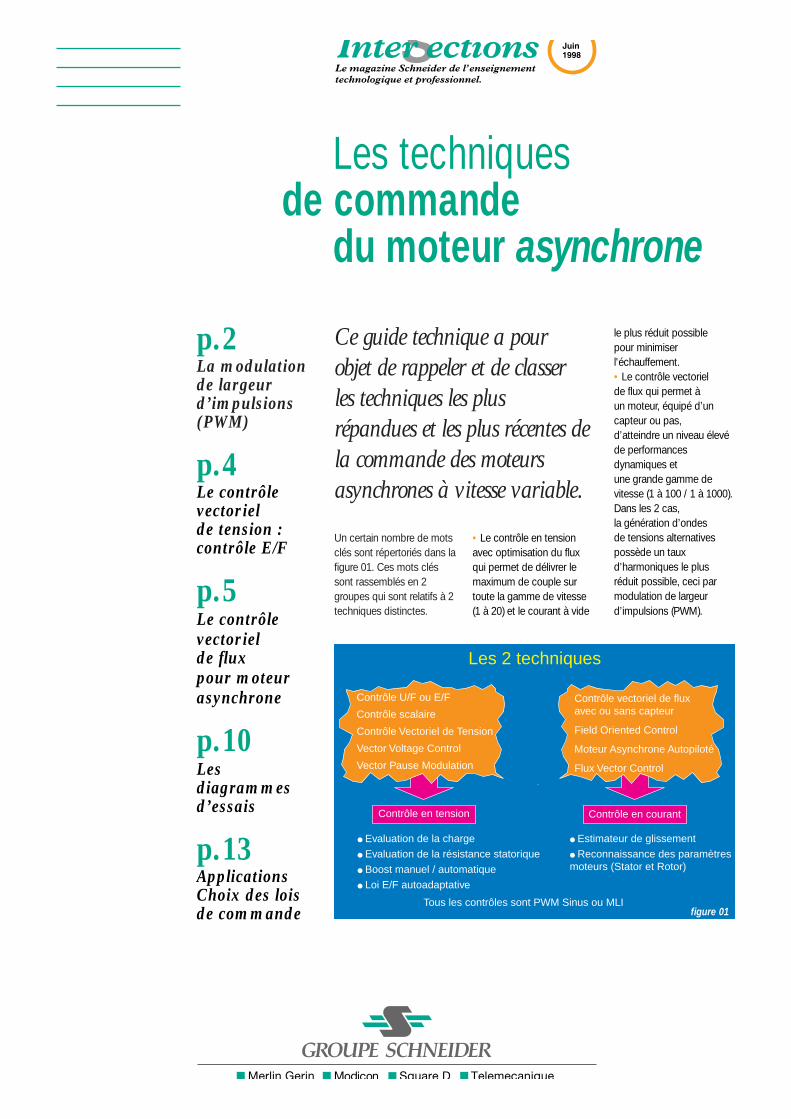
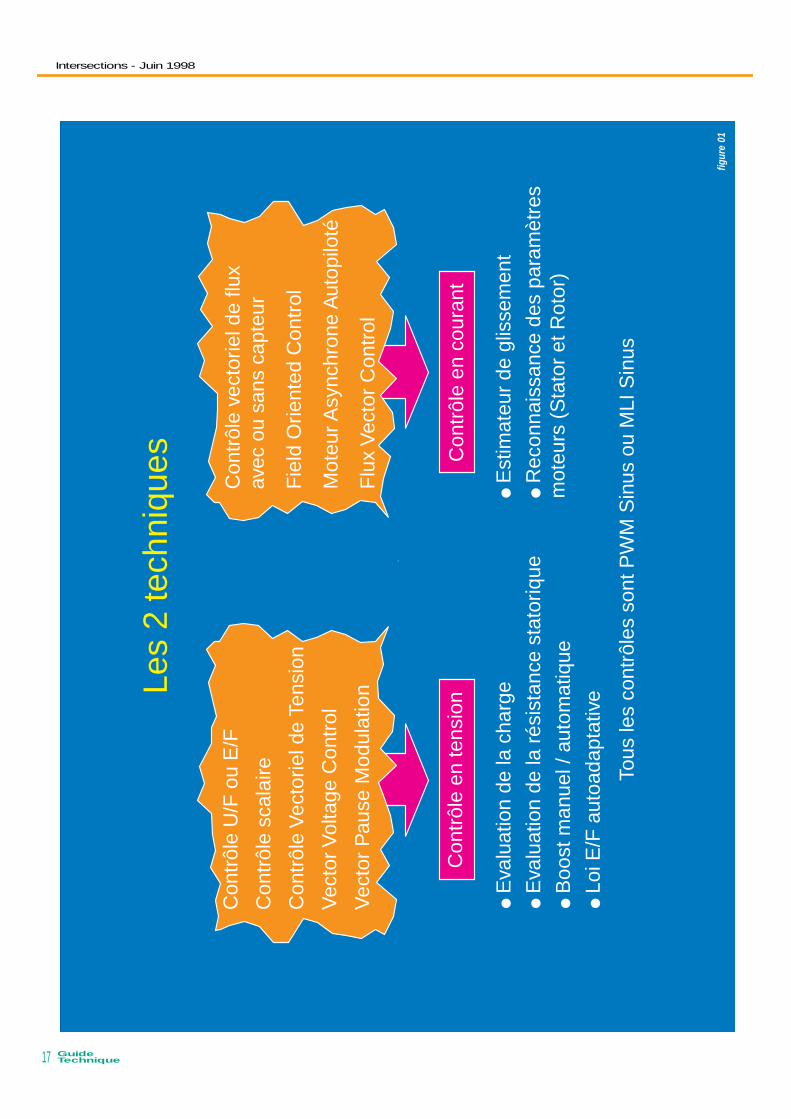
Un certain nombre de motsclés sont répertoriés dans lafigure 01. Ces mots cléssont rassemblés en 2 groupes qui sont relatifs à 2techniques distinctes.
• Le contrôle en tensionavec optimisation du fluxqui permet de délivrer lemaximum de couple surtoute la gamme de vitesse(1 à 20) et le courant à vide
Contrôle U/F ou E/F
Contrôle scalaire
Contrôle Vectoriel de Tension
Vector Voltage Control
Vector Pause Modulation
● Evaluation de la charge
● Evaluation de la résistance statorique
● Boost manuel / automatique
● Loi E/F autoadaptative
Contrôle vectoriel de fluxavec ou sans capteur
● Estimateur de glissement
● Reconnaissance des paramètres moteurs (Stator et Rotor)
Tous les contrôles sont PWM Sinus ou MLI
Les 2 techniques
Field Oriented Control
Moteur Asynchrone Autopiloté
Contrôle en tension Contrôle en courant
Flux Vector Control
figure 01
Ce guide technique a pour objet de rappeler et de classer les techniques les plus répandues et les plus récentes dela commande des moteurs asynchrones à vitesse variable.
Les techniques de commande
du moteur asynchrone
le plus réduit possible pour minimiserl'échauffement.• Le contrôle vectoriel de flux qui permet à un moteur, équipé d’uncapteur ou pas, d’atteindre un niveau élevéde performances dynamiques et une grande gamme devitesse (1 à 100 / 1 à 1000). Dans les 2 cas, la génération d’ondes de tensions alternativespossède un tauxd’harmoniques le plus réduit possible, ceci parmodulation de largeur d’impulsions (PWM).

GuideTechnique2
Intersections - Juin 1998
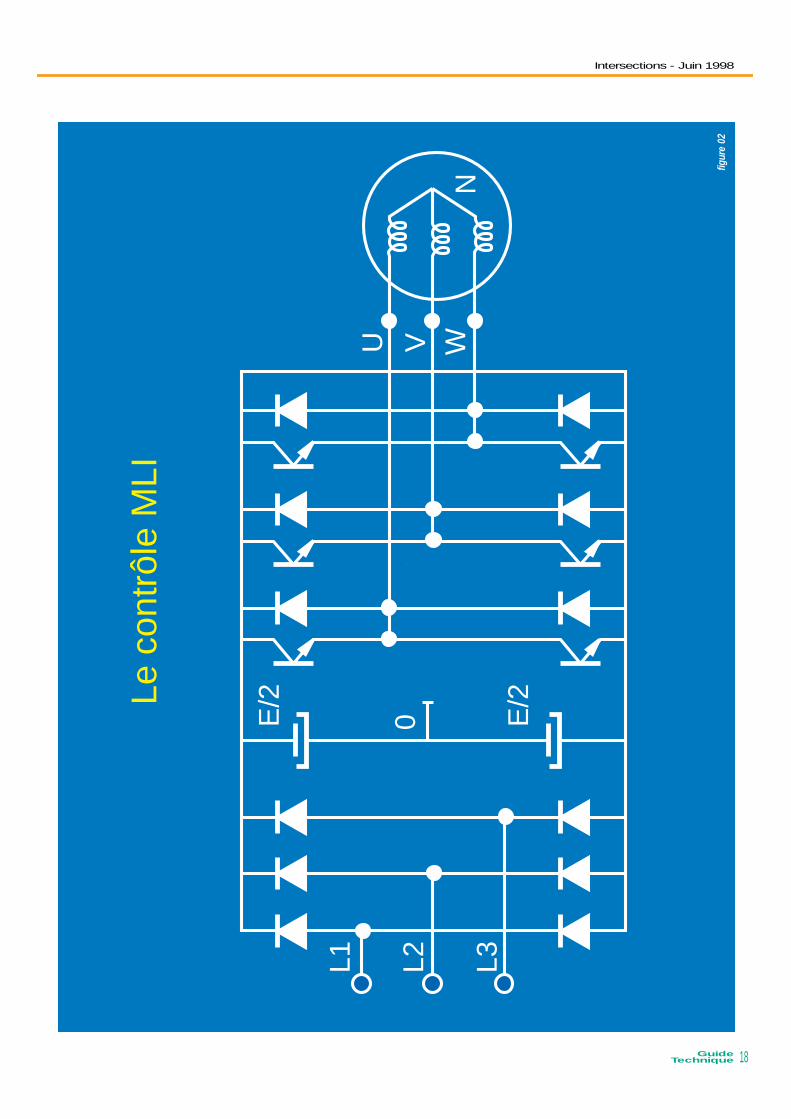
La modulation de largeur d'impulsionssinusoïdales(PWM sinus)Dans le domaine de lacommande des moteurs asynchrones, de puissanceinférieure à 500 kW, unestructure de puissance faitmaintenant l’unanimité :l’onduleur de tensionassocié à un redresseur non contrôlé et un filtrecapacitif (figure 02). Les progrès en coût et en performances accomplispar les interrupteurs depuissance, ont permis à
cette structure très simplede s’imposer. La modulationde largeur d’impulsionsconsiste à commander lesinterrupteurs de manière àdélivrer au moteur une suited’impulsions d’amplitudefixe, positives ou négativeset modulées en largeur. Ilexiste de très nombreusespossibilités de réalisations,par exemple :• la technique analogiqueutilisée sur les réalisationsindustrielles les plusanciennes. Elle consiste à générer :- une onde sinusoïdale deréférence par phase dontl’amplitude et la fréquencereprésentent la tension de sortie,
La modulation de largeur d’impulsions(PWM)
L1
L2
L3
E/2
E/2
0U
VW N
Le contrôle MLI
U-0E/2
-E/2
V-0
W-0
U-WE
-E
tension entre phases
50 Hz
20 Hz
-20 Hz détail
figure 02
figure 03 figure 04
- une onde de modulationde fréquence élevée deforme triangulaire. Les interrupteurs de puissance sont commandésaux instants d’intersectionde ces 2 ondes, instantsdéterminés par descomparateurs (figure 03).
• la technique numérique :l’apparition desmicroprocesseurs a permisde transposer le principedécrit précédemment en technique numérique.• la modulation, entièrementréalisée par le microprocesseur, consiste à
commander lesinterrupteurs avec un motifde base auquel onsuperpose une modulationà haute fréquence réalisantla variation de tension (figure 04).
GuideTechnique 3
Intersections - Juin 1998
La modulationvectorielleLa modulation vectorielleest un cas particulier de lamodulation de largeurd’impulsions. Suivant la représentationvectorielle précédente, sonprincipe consiste àconsidérer un vecteurtension quelconque commeétant, dans un intervalle detemps T, la combinaison de2 vecteurs adjacents et duvecteur nul. Autrement dit(figure 08), pour appliquer latension X pendant le tempsT, il est équivalentd’appliquer :• la tension a pendant letemps T1,
• la tension b pendant le
temps T2,
• une tension nulle pendantle temps T0,avec T = T0 + T1 + T2.L’algorithme de calcul apour objet de fournir lesvaleurs de T0, T1, T2.La figure 08 donne unexemple de chronogrammedes tensions sur l’intervalle T.L’intérêt de ce type demodulation est de pouvoirêtre facilement implantédans un microprocesseur.Toutefois, comme tous lestypes de modulation, laqualité de celle-ci résidedans la possibilité d’obtenirune fréquence élevée demodulation, c’est-à-dired’avoir un nombre élevéd’intervalles T par période.
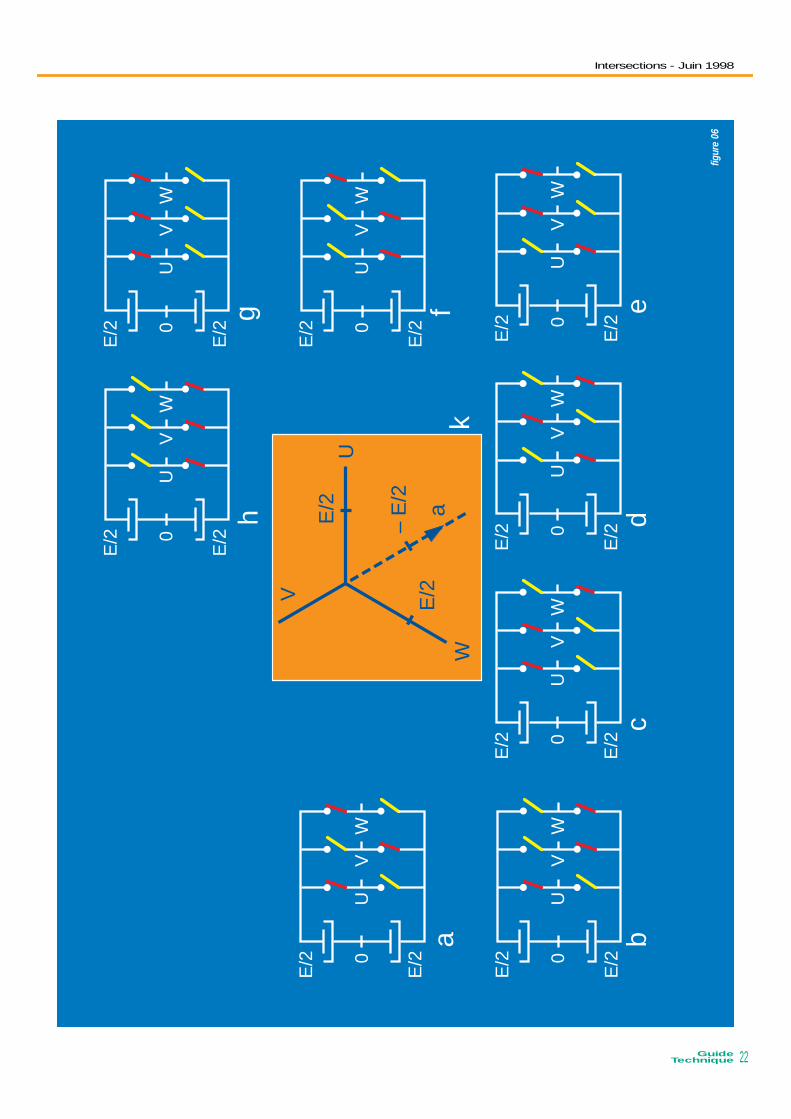
La représentationvectorielle desvariablesDans tout système triphasééquilibré, les variablespeuvent être représentéespar un vecteur dont lescomposantes, disposéessur 3 axes à 120°, sont lesvaleurs de ces variables surchaque phase. Exemple : la figure 05 représente desvariables triphaséessinusoïdales.Ainsi, on peut représenter,sous forme d’un vecteur, lestensions U - 0, V - 0 et W - 0.
Les différentes combinaisonsde commande desinterrupteurs sontreprésentées sur la figure06. A chacune de cescombinaisons correspondune position du vecteurtension. Ainsi la figure 06 (k)montre la position du
vecteur tension pour lacombinaison (a), lescomposantes suivant lesaxes U, V, W étant alorsrespectivement égales àE/2, - E/2, E/2.L’extrémité du vecteurtension a donc seulement
7 positions possibles(figure 07) :• sur les sommets d’unhexagone pour lescombinaisons (a) à (f),• au centre de l’hexagone(vecteur nul) pour lescombinaisons (g) et (h).
1
2
3
θ0
t
1
2
3
θ
E/2
– E/2E/2 a
V
U
W
0 U V W
E/2
E/2
a
0 U V W
E/2
E/2
b
0 U V W
E/2
E/2
c
0 U V W
E/2
E/2
d
0 U V W
E/2
E/2
e
0 U V W
E/2
E/2
f
0 U V W
E/2
E/2
h
0 U V W
E/2
E/2
g
k
V
W
U
d c
b
af
e g
h
b
a
U
X
0
T2
T.b
T1
T.a
a a b h b
E/2U-0-E/2
t
V-0 t
W-0 t
U-V t
T1 T2 T0
T
figure 05
figure 07
figure 06
figure 08

GuideTechnique4
Intersections - Juin 1998
Le schéma équi-valent du moteurasynchroneLa figure 09 représente leschéma équivalent parphase d’une machineasynchrone. Le flux est créépar le courant circulant dansl’inductance magnétisanteLm. Les performancesoptimales du moteur sontobtenues si le flux, et doncle courant magnétisant, estmaintenu sensiblementconstant sur toute la gammede vitesse.Le courant magnétisant peutêtre calculé par l’expression :
avec Es = Vs - (Rs + Lsω) IEn négligeant (Rs + Lsω) Ion obtient :
Le courant magnétisant peut donc être maintenuconstant en maintenant lerapport sensiblementconstant.Toutefois, à des fréquenceset des tensions faibles, leterme (Rs + Lsω) I ne peutplus être négligé, et en particulier le terme RsI.Pour maintenir le fluxconstant, quelle que soit lacharge du moteur et doncquel que soit le courant
absorbé, le maintien d’unrapport constant n’est pas suffisant.
La loi tension/fréquence
Ajustage manuel
Il consiste à adopter une loitension/fréquence avecaugmentation fixe de latension à basse fréquence.
Le contrôle vectorielde tension :contrôle E/F
Ls = inductance de fuite statorique
Rs = résistance statorique
Lm = inductance mutuelle, inductance magnétisante
Rr = résistance rotoriqueLr = inductance de fuite rotorique
Le schéma équivalentdu moteur asynchrone
I = Id + Iqmagnétisant flux
actif couple
Vs
Rs LsI
Es Lm
Id
Lr
Rr/g
Iq
figure 09
Cet ajustage est parfoisappelé “boost manuel”. La tension appliquée aumoteur n’est pas fonctionde sa charge. Cet ajustagepermet d’obtenir un coupleélevé à basse vitesse,mais présentel’inconvénient demaintenir un courant élevédans le moteur à vide avecrisque de saturation et desurcharge.
Ajustage automatique
Il consiste à délivrer aumoteur une tension aveccompensation automatiquede la chute de tension RsI. A une vitesse donnée, latension fournie au moteurvarie en fonction de lacharge. Cet ajustage est
parfois appelé “boostautomatique”. Un réglagepermet de faire varier lecoefficient, c’est-à-direcompenser au plus justela chute de tension RsI du moteur utilisé. Cet ajustage permetd’obtenir un couple élevé, àbasse vitesse, tout en ayantun courant faible à vide. Par contre, il présentel’inconvénient d’un tempsde réponse plus lent. Un excès decompensation peutégalement conduire à une suralimentationentretenue du moteur : - augmentation de la charge,- augmentation de la tension, - augmentation du courant.
Cas particulier :couple quadratique
Le couple résistant exercépar une pompe centrifugeou un ventilateur varie enfonction du carré de lavitesse. On peut donc, sansinconvénient, diminuer leflux du moteur et donc latension d’alimentation dumoteur, pour une fréquenceinférieure à la fréquencenominale (figure 10).Un ajustage automatique dela tension, fonction de lacharge du moteur, permetde délivrer un couple dedécollage suffisant à bassevitesse.

GuideTechnique 5
Intersections - Juin 1998
Performances
Contrôle de flux
Afin d’obtenir desperformances élevées, encouple de surcharge et enrégime transitoire, lesvariateurs de ce typeréalisent un contrôle de fluxcomportant les fonctionssuivantes :• estimation de la charge dumoteur réalisée à partir de lamesure du courant dansl’étage continu du variateur, • estimation de la résistancestatorique. Celle-ci estfonction du calibre dumoteur, connu par le réglagede la protection thermiqueet par son état thermique.Ces deux estimationspermettent de calculer latension à appliquer aumoteur, à une vitessedonnée, pour obtenir le flux
optimum,• boucle de fréquence. Elle évite le décrochage dumoteur en maintenant soncouple constant. Ceci estobtenu en réduisant à la foisla tension et la fréquence,• suralimentation transitoire.Une augmentation anticipéede la tension est fournie aumoteur lors d’accélérationsrapides, afin de maintenir leflux en régime transitoire.Cette fonction est parfoisappelée “boost dynamique”, • compensation deglissement. Afin demaintenir la vitesse de rotation sensiblementconstante, le moteur estalimenté à une fréquencelégèrement plus élevée en charge qu’à vide. Ce surcroît de fréquence estfonction de l’estimation de la charge citée plus haut
et de la fréquence deglissement nominale dumoteur. Celle-ci est estiméeen fonction du calibre du moteur mais peutégalement être ajustée
manuellement.Toutes ces fonctionspermettent d’obtenir unecourbe couple/vitesse ensurcharge telle quereprésentée sur la (figure 10)Toutefois, il apparaît que
tous les systèmes decontrôle en tension citésfigure 01, même optimisés,ne permettent pas decontrôler correctement leflux et le couple à très bassefréquence (ƒ < 2 ou 3 Hz).
U
Fm
Um
F
Vmf
= cte
U
Fm
Um
F
U
Fm
Um
F
C
F
A
B C D
Adaptation en fréquence Compensation de glissementCompensation RI automatiqueCouple indépendant de U réseau
Loi U/F adaptée à l'application
figure 10
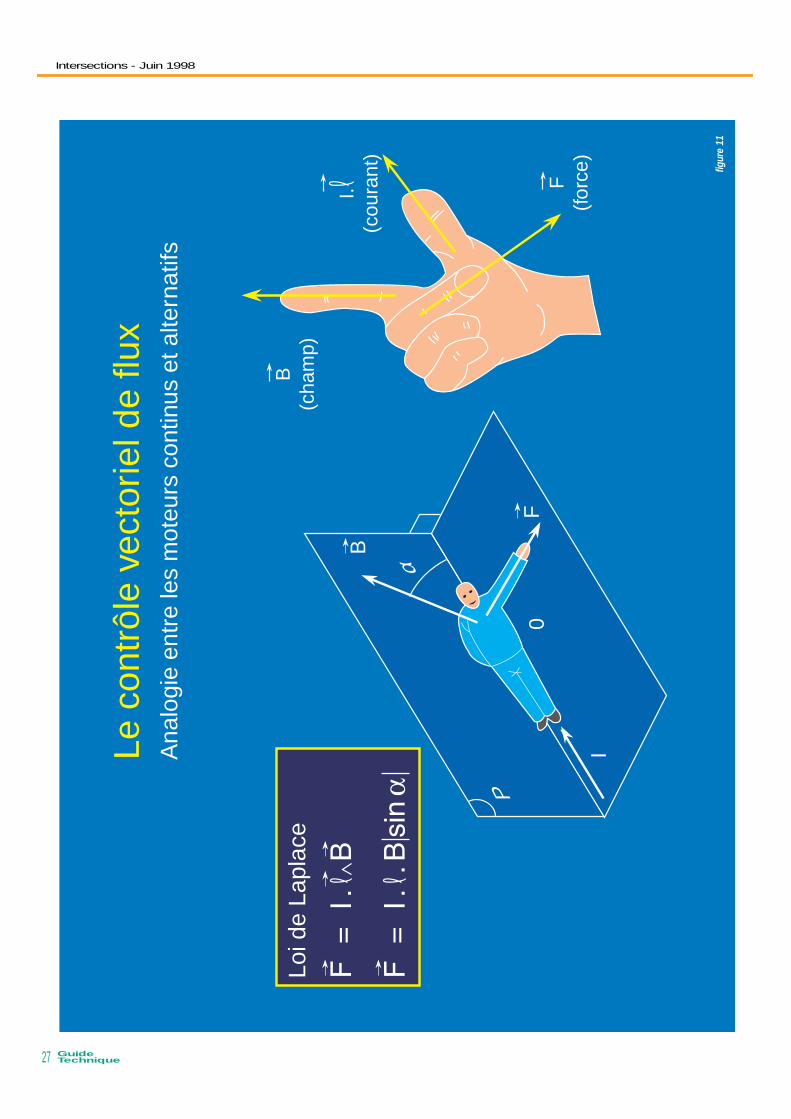
Le contrôle vectorielde flux pour moteurasynchroneLa loi de Laplace Les moteurs électriquessont des actionneurs quipermettent de transformerune énergie électrique enénergie mécanique.Cette transformation est
régie par la loi de Laplace.“Un conducteur parcourupar un courant et placédans un champ magnétiqueuniforme est soumis à uneforce d’origineélectromagnétique”.
Analogie entre les moteurs continus et alternatifs
B(champ)
F(force)
I.(courant)
P
0
α
I
Le contrôle vectoriel de flux
Loi de Laplace
B
F
figure 11

GuideTechnique6
Intersections - Juin 1998
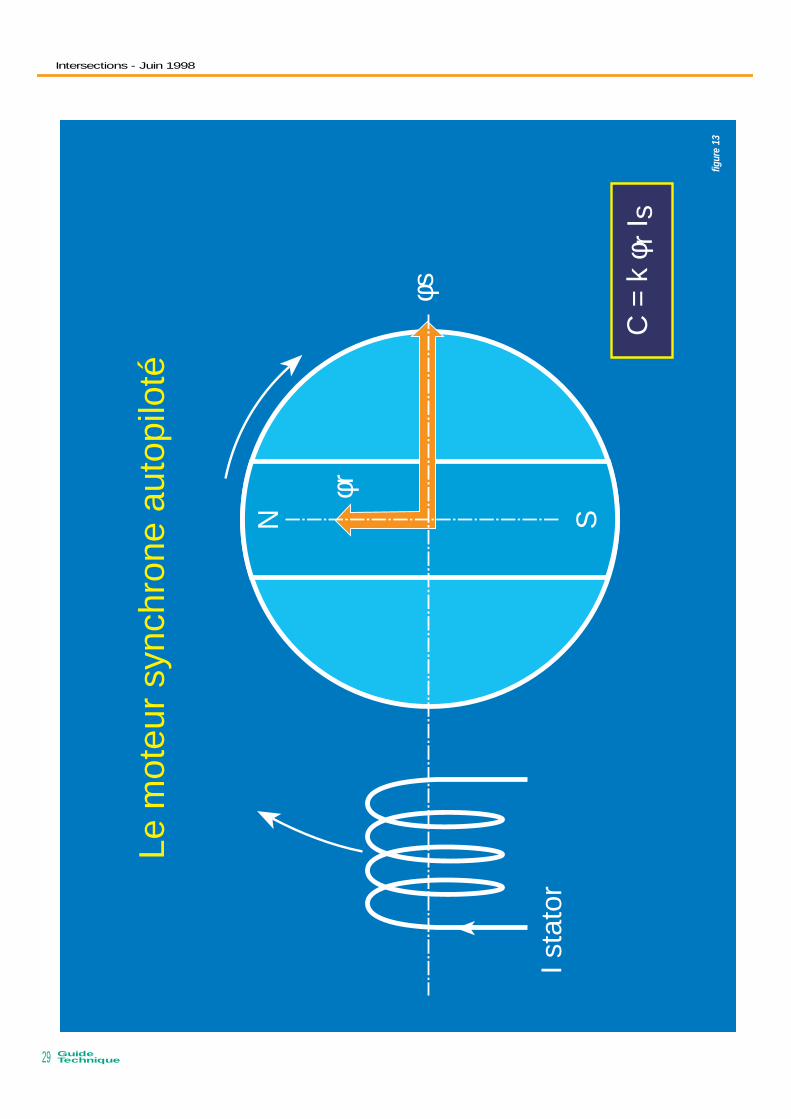
Le moteur synchrone autopiloté (brushless) Ce même principe est utilisédans le moteur synchroneautopiloté mais cette fois :• le flux rotorique estconstant. Il est créé par desaimants permanentsmontés dans le rotor,• le flux statorique estvariable. Il est créé par unenroulement triphasépermettant de l’orienterdans toutes les directions.La commutation mécaniquedu moteur à courant continua été remplacée par unecommutation électronique.Elle consite à contrôler laphase des ondes decourant de façon à créer unchamp tournant, toujours enavance de 90° sur le champdes aimants, afin que lecouple soit maximal.Dans ces conditions lecouple est proportionnel au courant statorique.C = K Φr Is
Le moteur asynchrone àcage C’est le moteur le plusrépandu dans l’industrie.Il est robuste, fiable,normalisé, économique,disponible, peuencombrant…Il est constitué :• d’un stator équipé d’unenroulement triphasé,• d’un rotor à cage d’écureuil. Lorsque les enroulementsstatoriques sont alimentés,ils produisent un champtournant.Les lignes de flux quitraversent le rotor sedéplacent par rapport auxbarres conductrices ; uncourant induit prendnaissance dans ces barresmises en court-circuit parleurs extrémités.L’action du champmagnétique sur ce courantgénère des forces (Loi deLaplace), donc un couplequi entraîne le rotor dans lesens du champ tournant.Le couple produit par lamachine est un couplemoteur car il s’oppose aucouple appliqué par la charge qui est à l’origine duglissement. On démontre que pour lesvitesses normales de fonctionnement proches dusynchronisme, le couple estbien proportionnel au glissement. C = Kg Us2
Us étant la tensiond’alimentation statorique(figure 14).
Le moteur à courant continu
φ = Kif C = k'φI
Pôle Sud Pôle Nord
I
I
If If
F
F
Sens de
rotation
moteurφ
I stator
N
S
φs
C = k φr Is
φr
Le moteur synchrone autopiloté
figure 12
figure 13
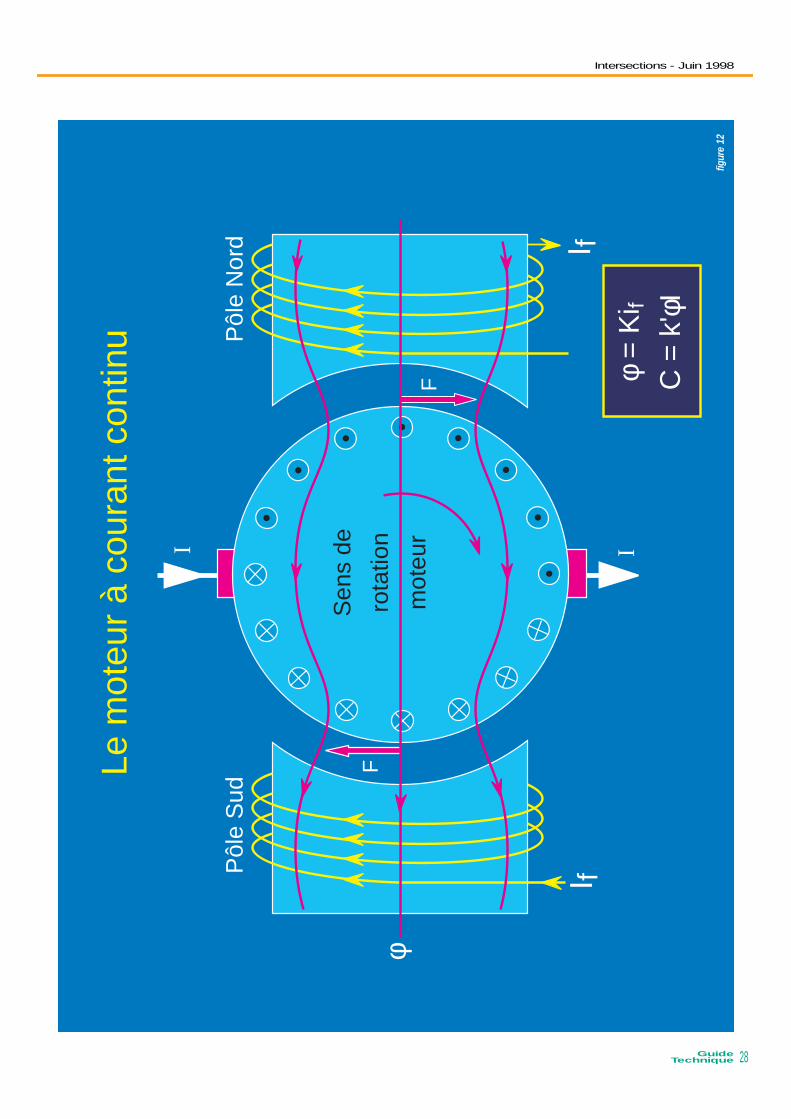
Le moteur à courant continu Le moteur à courant continu
est l’exemple le plus simple
d’application de la loi de
Laplace. Dans la machine à
courant continu à excitationséparée, le flux et le couplesont découplés etcontrôlablesindépendamment.• Le courant inducteur estproducteur de flux.• Le courant induit est
producteur de couple.Φ = Kif, C =K’ ΦILe maintien desconducteurs actifs dans leflux est réalisé par unecommutation mécanique àl’aide du collecteur et desbalais.

GuideTechnique 7
Intersections - Juin 1998
Φs
θ
Le moteur asynchronechamps statorique et rotorique
Rotor
Stator
Φrf = pNs
N
fr = gf
θ
Ns = N + g NsC = k Φs Φr sinθ
Rappel du principe :
L’enroulement statorique de2p pôles, alimenté par descourants de fréquence f,crée un champ tournant à lavitesse synchrone.
Ce flux balayant lesenroulements rotoriques yinduit des f.e.m., donc descourants puisque cesbobinages sont en court-circuit.Si le rotor tournait à lavitesse de synchronisme Ns,le flux à travers sesenroulements ne varieraitplus, d’où absence decourant rotorique et decouple. Le moteur tourne àune vitesse N d’autant plusinférieure à Ns que le coupledemandé sur l’arbre estimportant.On appelle glissementl’écart relatif :
Le couple provient del’action du flux statoriquesur le courant rotorique qu’ila lui-même induit.
La vitesse de balayage duflux statorique à travers lerotor est :Ns - N = g NsLes courants rotoriquesauront donc une fréquencefr = p g Ns = gf
Le rotor alimenté par descourants de fréquence gfcrée un champ tournant parrapport au rotor à la vitesse gf/p = g Ns = Ns-N (voir tableau ci-dessous).Puisque les champs, statorique Φs et rotoriqueΦr, tournent à la mêmevitesse constante Ns, laposition relative des pôlesdu stator et de ceux durotor est fixe. Ces pôlespeuvent donc s’attirer ou serepousser, ce qui crée uncouple sur l’arbre. Le champrotorique Φr est accroché à celui du stator (figure 15).On démontre quel’expression du couple est C = k Φs Φr sin θOn voit que le couple estmaximum si θ = 90°, d’oùl’analogie avec le moteursynchrone autopiloté.
Le moteur asynchrone
C = k g Us2
Us
Machine asynchrone élémentairestator triphasé et rotor à cage
i
t
iu iv iwU V W
Neutre
ϕ
figure 15
Vitesse champ statorique par rapport au stator Ns
Vitesse champ rotorique par rapport au rotor Ns-N
Vitesse rotor par rapport au stator N
Vitesse champ rotorique par rapport au stator (Ns-N) + N = NS
figure 14

GuideTechnique8
Intersections - Juin 1998
Le schéma équivalent du moteur asynchrone à cage Dans le moteur asynchrone,le courant statorique sert àla fois à générer le flux et lecouple. Le découplagenaturel de la machine àcourant continu n’existeplus.Par analogie avec le moteurà courant continu, on peutdécomposer le courant statorique en : • un courant magnétisant Idqui va générer le flux,• un courant actif Iq qui vagénérer le couple.Les performancesoptimales du moteur sontobtenues si le flux, donc lecourant magnétisant Id, estmaintenu constant sur toutela plage de vitesse (voirpages 4 et 5). La figure 16 indiquecomment se décompose lecourant statorique Is quandle couple varie.
Le contrôle vectoriel de fluxPour obtenir des couplesimportants à très faiblevitesse, voire à vitesse nulle,ainsi que des performancesdynamiques, il estnécessaire d’utiliser unmode de contrôle différent :le contrôle vectoriel de fluxou contrôle à flux orienté.Le contrôle vectoriel de fluxconsiste à modéliser la
machine et à transformerses équations de manière àdécoupler les variables flux et couple et à contrôler séparement lescourants Id et Iq. Considérons la machine
asynchrone biphaséeéquivalente équipée dedeux bobines fictivesorthogonales, l’une étantdestinée à produire le fluxet l’autre à produire lecouple (figure 17).
Les 2 flux Φr et Φs sontproduits par les deuxcourants sinusoïdaux Id et Iq. A partir de là, il est possibleaussi de considérer que cesbobines sont équivalentes à
2 pôles fictifs, créés par descourants continus, que l’onferait tourner à la vitessenécessaire comme dans lemoteur synchroneautopiloté.En fait, si l’on considère quela bobine D, alimentée parle courant continu Id, créeun flux fixe d’axe d et quel’on alimente la bobine Qpar un courant continu Iq, ily a naissance d’un fluxd’axe q. Selon la loi deLENZ un courant rotoriques’oppose à la croissance dece flux. Le courant rotoriqueet le flux d’axe d produisentun couple comme dans lamachine à courant continu.Le couple ainsi produitn’étant que transitoire, il estnécessaire pour le maintenirde déplacer la bobine Q enmaintenant l’interactionchamp-courant, donc degarder le flux d’axe dperpendiculaire à l’axe q.Ainsi il suffit de faire tourner l’ensemble desbobines fictives D et Q en les maintenantperpendiculaires.Le courant Id et le flux Φsseront maintenus constantsdans le cas dufonctionnement à coupleconstant.
Le moteur équivalent biphasé
Φs
F
D
q
d
Q
id F
iq
I = Id2 + Iq2
La somme vectorielle
Iq2 => couple 2
courant actifI 2
mot
eur
I 1 m
oteu
r
courant réactif Id => flux = constante (jusqu'à ωn)
θ2
θ1
Iq1 => couple 1
figure 16
figure 17

GuideTechnique 9
Intersections - Juin 1998
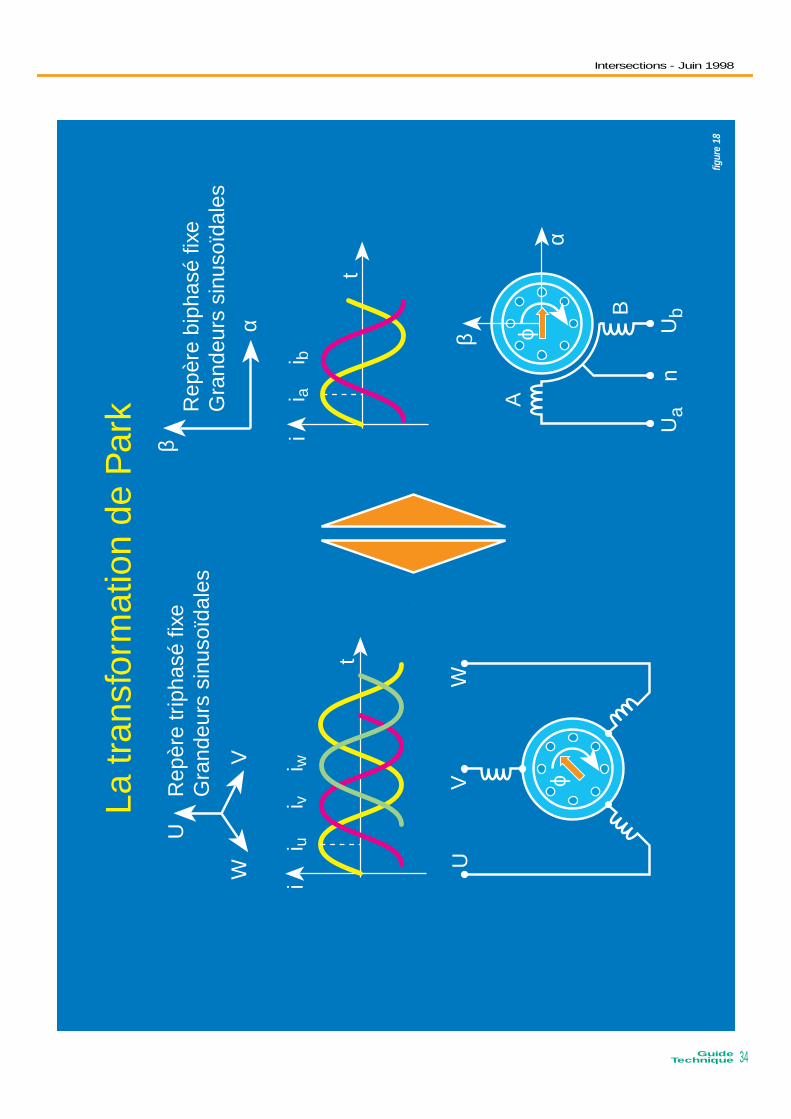
La transformation deséquations de la machine,appelée transformation dePark, consiste tout d’abordà remplacer le moteurtriphasé par le moteurbiphasé équivalent. D’unsystème triphasé fixe onpasse à un systèmebiphasé fixe (les grandeursrestent sinusoïdales) puis àun repère tournant à lavitesse du champ statorique ; dans ce repèreles grandeurs électriques
deviennent des grandeurscontinues.Cette transformationnécessite de nombreusesopérations mathématiqueset d’avoir accès à tous lesparamètres de la machine(résistances, inductances,flux). La transformationréciproque, égalementpossible, va permettre de générer les courantsalternatifs statoriques dansle moteur triphasé.
La transformation de Park
ϕ
i
t
iu iv iw
U V W
ϕ
i
t
ia ib
Ua Ubn
β
α
VW
U Repère triphasé fixeGrandeurs sinusoïdales
β
α
Repère biphasé fixeGrandeurs sinusoïdales
A
B
figure 18
La transformation de ParkLe pilotage vectoriel
Φs
Repère biphasé tournantGrandeurs électriques continues
q (couple)
d (flux)
φs = k1 IdC = k2 φs Iq
F
D
q
d
Q
idF
iq
La structure de la partiepuissance est classique, elleest constituée d’un onduleurde tension associé à unredresseur non contrôlé et àun filtre capacitif. Les ondes de tension sontgénérées par modulation delargeur d’impulsion.La vitesse du moteur estsoit mesurée par un capteursoit calculée.La référence flux estélaborée en fonction de lavitesse du moteur.
La sortie du régulateur devitesse constitue laréférence de couple.La vitesse du champ tournant est obtenueen ajoutant à la vitesse dumoteur le glissement qui aété calculé pour obtenir lecouple.Deux boucles de courantsont utilisées pour imposerles courants triphasés aumoteur en fonction du fluxet du couple nécessaires.
L'algorithme typed'une commande vectorielle
M
référence flux
2/3
Iq
Im
Id
générateurMLI
2/3
Iq
Im
Idcalculéemesurée
ou calculée
intégrateur
ωR
référencevitesse
Id Id
Id'
Iq Iq
Iq'
référence courant / couple
position angulaire
Ur, s, t
Ir
It
Id'
Iq'
ωs
ωR ωg
γs
Le pilotage vectoriel est réalisé
figure 19
figure 20
La transformation de Park L'algorithme type d'une commande vectorielle
GuideTechnique10
Intersections - Juin 1998
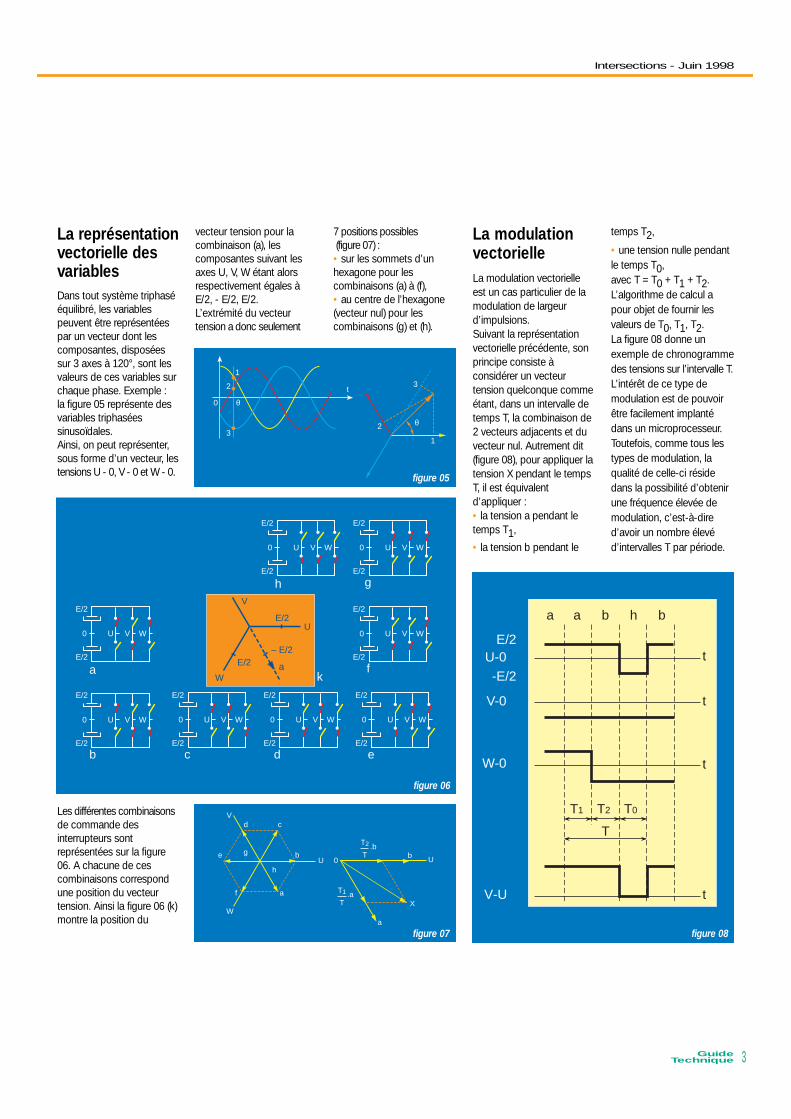
Inversion ± 50 Hzavec rampe de 5 secondes
La figure 21 montre lavitesse et le courant dumoteur au cours d'uneinversion entre - 50 Hz et + 50 Hz avec une rampelongue de 5 secondes. Le temps de rampereprésente l'accélération de0 à la vitesse nominale.Donc, ici, l'inversion dure 10 s. On remarque lalinéarité de la vitesse,notamment au passage duzéro de vitesse.
Les résultats suivants ontété obtenus avec un produitindustriel, le variateur devitesse TelemecaniqueAltivar 66. Le moteur utilisé est unmoteur standard du marchéde 7,5 kW, sans capteur. Il entraîne une génératrice
qui possède une dynamotachymétrique servant uniquement àvisualiser la vitesse réelle. Les caractéristiques dumoteur à notre dispositionne sont rien d'autre quecelles marquées sur laplaque signalétique.
Inversion ± 33 Hzavec rampe rapide
Avec une rampe rapide,l'inversion entre ± 33 Hz ou1 000 t/mn dure moins de0,3 s. L'échelle de tempsest dilatée 20 fois par rapport à la figureprécédente. On note toujours la linéaritéde la vitesse qui démontrela constance du couple etdu flux pendant l'inversion (figure 22).
Les diagrammesd'essais
2 s/div
Vitesse (500 t/mn/div)
Courant (10 A/div) figure 21- Linéarité de la vitesse
0,1 s/div
Vitesse (500 t/mn/div)
Courant (10 A/div) figure 22 - Passage par zéro sans discontinuité

GuideTechnique 11
Intersections - Juin 1998
Inversion ± 3 Hz
A basse vitesse (ici 3 Hz), le passage par zéro se faitd'une façon linéaire et sansoscillation. L'aspect sinusoïdal ducourant montre aussi que le flux est stable et biencontrôlé (figure 23).
Accélération lente à 70 Hz
Le bon contrôle du flux sevoit surtout dans cetteévolution lente de la vitesse.La constance du courantmagnétisant depuis lavitesse nulle jusqu'à lavitesse nominale montreque le flux est constantdans cette région. Au-delàde la vitesse nominale, leflux diminue avec ladésexcitation automatique.(figure 24).
Tenue en couple à 33 Hz
La figure 25 montre lecomportement en régimedynamique : accélération àvide à 1 000 t/mn puis à-coup de charge nominaleet délestage. On voit que le glissement est biencompensé, car il n'y a pasd'erreur statique. Le module du courantaugmente car, en plus du courant magnétisant, la composante active monteavec le couple.
Courant (18 A/div) figure 23 - Forme de courant à basse vitesse
Vitesse (25 t/mn /div)
0,2 s/div
5 s/div
Vitesse (750 t/mn /div)
Courant (10 A/div) figure 24 - Bon contrôle du flux sur toute la gamme de vitesse
0,5 s/div
Vitesse (333 t/mn/div)
Courant (10 A/div) figure 25 - Sans erreur statique
GuideTechnique12
Intersections - Juin 1998
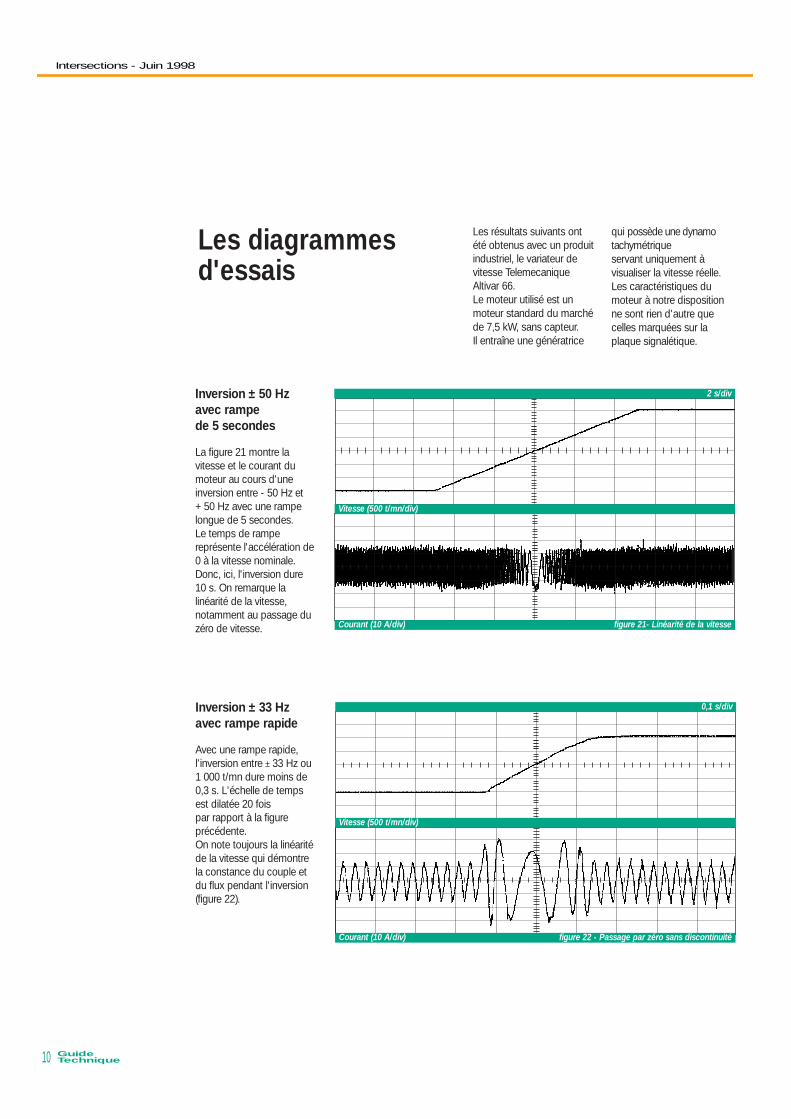
Diagramme couple-vitesse
Ce diagramme couple-vitesse illustre lefonctionnement dans les 4 quadrants : moteur etgénératrice dans les 2 sensde marche. Avec le courantlimité à 1,5 fois le courantnominal, on obtient plus de
1,4 fois le couple nominal,et ceci jusqu'à 1 Hz. En génératrice, le couple est encore plus élevé (icic'est le système de chargequi est limité). Le diagramme estpratiquement le mêmequ'avec un moteur courantcontinu ceci sans capteurde vitesse (figure 27).
40 20 10 5 1 1 5 10 20 40 Hz
1
2
1
2T/Tn
Reprise à la volée
La commande vectorielle, endehors de l'amélioration dela qualité de l'entraînement,permet aussi d'obtenird'autres fonctions annexesde manière plusperformantes (figure 26).Par exemple, la fonctionreprise à la volée permet dereprendre le contrôle d'unmoteur en pleine rotation. Le moteur étant coupé, savitesse diminue. Afin dereprendre le contrôle sans
surintensité il faut connaîtrela vitesse et la position duflux pour pouvoir sesynchroniser. Grâce à lastructure de la commande, ilest possible d'estimer lavitesse et le flux alors que lemoteur n'est plus alimenté.On remarque ici que la coupure a duré plus de 5 secondes. Autrement dit l'estimation de la vitesse a pu se fairealors qu'il ne reste qu'unfaible flux rémanent dans la machine.
2 s/div
Vitesse (500 t/mn/div)
Courant (10 A/div) figure 26 - Reprise de contrôle sans surintensité
figure 27 - Diagramme couple-vitesse
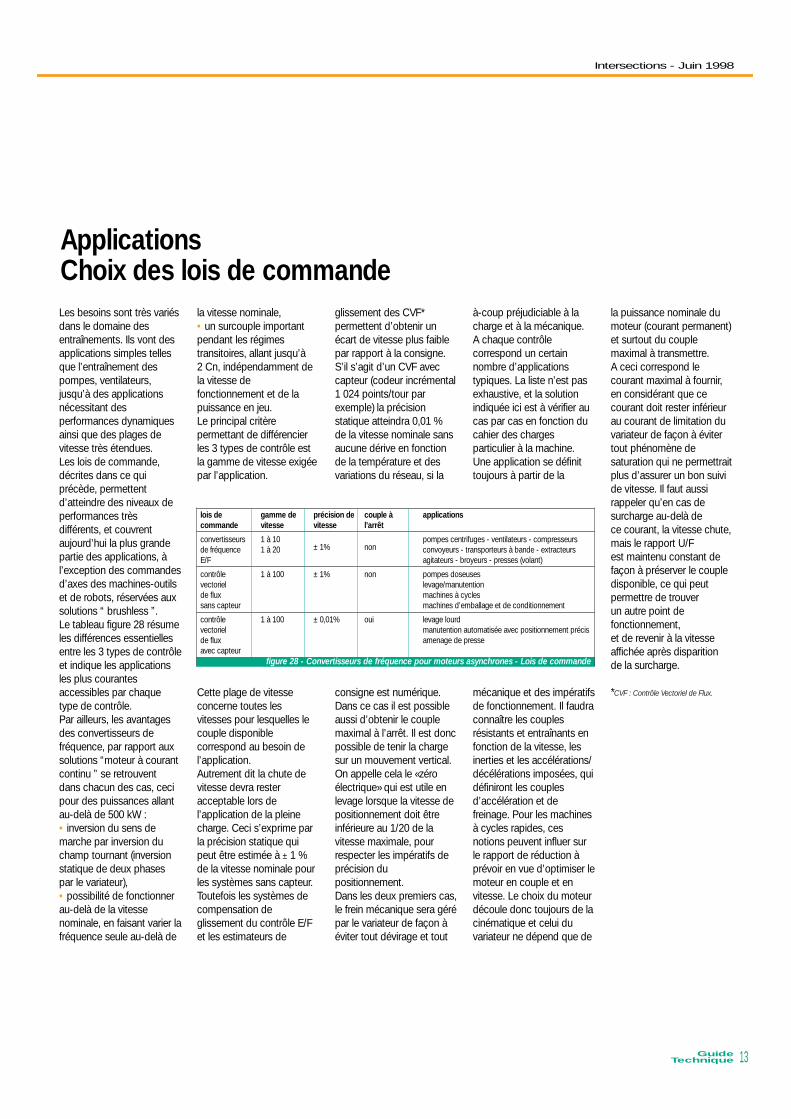
Les besoins sont très variésdans le domaine desentraînements. Ils vont desapplications simples tellesque l’entraînement despompes, ventilateurs,jusqu’à des applicationsnécessitant desperformances dynamiquesainsi que des plages devitesse très étendues.Les lois de commande,décrites dans ce quiprécède, permettentd’atteindre des niveaux deperformances trèsdifférents, et couvrentaujourd’hui la plus grandepartie des applications, àl’exception des commandesd’axes des machines-outilset de robots, réservées auxsolutions “ brushless ”.Le tableau figure 28 résumeles différences essentiellesentre les 3 types de contrôleet indique les applicationsles plus courantesaccessibles par chaquetype de contrôle.Par ailleurs, les avantagesdes convertisseurs defréquence, par rapport auxsolutions “moteur à courantcontinu ” se retrouvent dans chacun des cas, cecipour des puissances allant au-delà de 500 kW :• inversion du sens demarche par inversion duchamp tournant (inversionstatique de deux phases par le variateur),• possibilité de fonctionnerau-delà de la vitessenominale, en faisant varier lafréquence seule au-delà de
la vitesse nominale,• un surcouple importantpendant les régimestransitoires, allant jusqu’à 2 Cn, indépendamment dela vitesse defonctionnement et de lapuissance en jeu.Le principal critèrepermettant de différencierles 3 types de contrôle estla gamme de vitesse exigéepar l’application.
Cette plage de vitesseconcerne toutes les vitesses pour lesquelles lecouple disponiblecorrespond au besoin del’application.Autrement dit la chute devitesse devra resteracceptable lors del’application de la pleinecharge. Ceci s’exprime parla précision statique quipeut être estimée à ± 1 %de la vitesse nominale pourles systèmes sans capteur.Toutefois les systèmes decompensation deglissement du contrôle E/Fet les estimateurs de
glissement des CVF*permettent d’obtenir unécart de vitesse plus faiblepar rapport à la consigne.S’il s’agit d’un CVF aveccapteur (codeur incrémental1 024 points/tour parexemple) la précision statique atteindra 0,01 %de la vitesse nominale sansaucune dérive en fonctionde la température et desvariations du réseau, si la
consigne est numérique.Dans ce cas il est possibleaussi d’obtenir le couplemaximal à l’arrêt. Il est doncpossible de tenir la chargesur un mouvement vertical.On appelle cela le «zéroélectrique» qui est utile enlevage lorsque la vitesse depositionnement doit êtreinférieure au 1/20 de lavitesse maximale, pourrespecter les impératifs deprécision dupositionnement.Dans les deux premiers cas,le frein mécanique sera gérépar le variateur de façon àéviter tout dévirage et tout
à-coup préjudiciable à lacharge et à la mécanique.A chaque contrôlecorrespond un certainnombre d’applicationstypiques. La liste n’est pasexhaustive, et la solutionindiquée ici est à vérifier aucas par cas en fonction ducahier des chargesparticulier à la machine.Une application se définittoujours à partir de la
mécanique et des impératifsde fonctionnement. Il faudraconnaître les couplesrésistants et entraînants enfonction de la vitesse, lesinerties et les accélérations/décélérations imposées, quidéfiniront les couplesd’accélération et defreinage. Pour les machinesà cycles rapides, cesnotions peuvent influer surle rapport de réduction àprévoir en vue d’optimiser lemoteur en couple et envitesse. Le choix du moteurdécoule donc toujours de lacinématique et celui duvariateur ne dépend que de
la puissance nominale dumoteur (courant permanent)et surtout du couplemaximal à transmettre. A ceci correspond lecourant maximal à fournir,en considérant que cecourant doit rester inférieurau courant de limitation duvariateur de façon à évitertout phénomène desaturation qui ne permettraitplus d’assurer un bon suivide vitesse. Il faut aussirappeler qu’en cas desurcharge au-delà de ce courant, la vitesse chute,mais le rapport U/F est maintenu constant defaçon à préserver le coupledisponible, ce qui peutpermettre de trouver un autre point defonctionnement, et de revenir à la vitesse affichée après disparition de la surcharge.
*CVF : Contrôle Vectoriel de Flux.
GuideTechnique 13
Intersections - Juin 1998
Applications Choix des lois de commande
lois de gamme de précision de couple à applicationscommande vitesse vitesse l’arrêt
convertisseurs 1 à 10 pompes centrifuges - ventilateurs - compresseursde fréquence 1 à 20 ± 1% non convoyeurs - transporteurs à bande - extracteursE/F agitateurs - broyeurs - presses (volant)
contrôle 1 à 100 ± 1% non pompes doseusesvectoriel levage/manutentionde flux machines à cyclessans capteur machines d’emballage et de conditionnement
contrôle 1 à 100 ± 0,01% oui levage lourdvectoriel manutention automatisée avec positionnement précisde flux amenage de presseavec capteur
figure 28 - Convertisseurs de fréquence pour moteurs asynchrones - Lois de commande

GuideTechnique14
Intersections - Juin 1998
Prenons l’exemple d’unepompe.La figure 30 représente lacourbe (AC) des pertes decharge d’un réseau sur lediagramme débit/pression.Les courbescaractéristiques de lamachine sont représentéespour 2 vitesses différentes.Pour faire passer le débit de 1 (valeur nominale) à 0,7 il y a 3 méthodes possibles :- by pass : le point defonctionnement reste lepoint A,- par vannage, à vitesseconstante de la pompe : lepoint de fonctionnement sedéplace de A à B,- par variation de vitesse : lepoint de fonctionnement sedéplace de A à C.Généralement les exemplesde calculs de temps deretour sur investissementpermettent de conduire àun amortissement en moinsde 2 ans. Pour faire cecalcul, il faut connaître lescaractéristiques précisesdes machines, lesconditions defonctionnement ou
hypothèses d’étude àretenir, la différence de coûtd’investissement, quandelle existe, le type decontrat EDF à appliquer,etc.Notre logiciel ECO 6permet rapidement de faireune estimation.
Des lois de commande bienadaptées à la courbe decouple de ces machines(C = kN2) permettent sur lesvariateurs actuelsd’optimiser le courant parrapport au coupledemandé, réalisant 5 %d’économie supplémentaire.
H
1,3
1,0
0,6
Q10,7
A
B
C
P = k.Q. H E = P moy.tPB = k.0,7 QA.1,3 HA = 0,91 PAPC = k.0,7 QA.0,6 HA = 0,42 PA
La différence de pression entre B et C entraîne une différence d’énergie consommée.
Dans le cas présent sur le plan énergétique EB/EC = 2,17.
Diagramme débit/hauteur ou débit/pression.figure 30
Ventilateurs et pompesLes gammes de vitessessont généralement trèsfaibles (1 à 3) pour obtenirla pleine variation de débit.La variation de vitesse segénéralise sur cesapplications, l’intérêtprincipal étant, outre unesimplification desinstallations, le potentield’économie d’énergie trèsimportant que représente lasuppression des systèmesà perte de charge, sur lebudget d’exploitation. Sur100 % de la consommationélectrique des moteursindustriels, 63 %correspondent à lacirculation des fluides.L’EDF et l’Ademe (Agencede l’Environnement et de la Maîtrise de l’Energie ) quiorchestrent actuellementune campagne
d’information et depromotion concernant la«Maîtrise de la demanded’électricité», estiment queles économies réalisablessont de l’ordre de 30 % à chaque fois qu’il y avariation de débit. Dans lecas des ventilateurs,différentes solutionsexistent pour adapter ledébit.
La figure 29 récapitule etcompare la puissanceappelée par les différentsprocédés de réglage. Du point de vue économied’énergie, ils peuvent êtreclassés, du meilleur aumoins bon :• angle des pales d’unventilateur axial réglable enmarche (essentiellement àbasse vitesse),• vitesse de rotationvariable (elle n’est plusdésormais qu’électronique),• inclineurs à l’aspiration,• registre au refoulement.Du point de vue coûtd’achat et d’installation, duplus bas au plus élevé, leclassement estapproximativement :• registre,• inclineurs,• vitesse de rotationvariable,• pales réglables.L’économie d’énergie
correspond à la différencedes puissances appelées.Le diagrammedébit/hauteur oudébit/pression met cetteéconomie encore plus enévidence. Les courbes sontsimilaires pour lesventilateurs et les pompes.
puissanceappelée
débit d'air %
160
140
120
100
80
60
40
20
20 40 60 80 1000
1
1
2
2
33
4
4
0
0 besoin théorique de puissance
vitesse de rotation variable
angle des pales variable en marche
(ventilateur axial)
inclineurs à l’aspiration
(ventilateur centrifuge)
registre au refoulement
figure 29

GuideTechnique 15
Intersections - Juin 1998
sont également importants,puisque dans l’industrieautomobile, le temps decycle constitue le critèreprincipal. Si une meilleurestabilité est obtenue enphase d’accostage, les
phases de petite vitessepeuvent être réduites,entraînant une diminution ducycle de 20 % etaugmentant d’autant lescadences de passage surl’ascenseur-descenseur .
ManutentionCes systèmes concernenttous les transferts de piècesd’un point à un autre. Ilsdoivent se faire à unevitesse ou dans un tempsimparti, avec unpositionnement manuel ouautomatique, qui répondaussi aux critères du cahierdes charges en termes deprécision et de rapidité depositionnement.Les positionnements lesplus simples se font à partird’une vitesse d’approcheréduite.Celle-ci peut être donnéepar un moteur à deuxvitesses ou un palier devitesse plus faible donnépar le variateur du moteurasynchrone.Par contre si lepositionnement doit êtrerapide et précis, ce palierde basse vitesse doit êtreéliminé. Une répétitivitésuffisante peut être obtenuepar une rampe dedécélération préréglée. Une boucle de position(carte d’axe et capteur) seranécessaire pour obtenir unebonne précision. Notre expérience dansl’industrie automobile
permet de synthétiser lessolutions sur lesdiagrammes figures 31 et 32.Citons l’exemple del’ascenseur-descenseurpour l’industrie automobile.Il permet de mettre envaleur l’intérêt du CVF sanscapteur.Dans ce cas particulier, le but est de monter unevoiture du niveau 1 auniveau 2 afin de poursuivred’autres opérations demontage. Sur cesapplications, le problèmeprincipal réside dans lepositionnement à chaqueniveau.C’était le domaine dumoteur à deux vitesses,mais avec une mécaniqueplus complexe, et des fraisde maintenance élevés.La vitesse variable a permisd’apporter à la fois une plusgrande souplesse, unemeilleure flexibilité, descadences plus élevées ainsiqu’une meilleure fiabilité enminimisant les contraintesmécaniques. Des gainssont apparus à la mise enroute, puisque la machine apu être réglée simplementavec les réglages«standard» du produit. Le variateur s’est chargéd’intégrer, par la mesure, les paramètres nécessairesà ses algorithmes, et parl’intermédiaire de soncontrôleur de fluxpermanent, les a optimisésau cours de sonfonctionnement.Les gains à l’exploitationsont évidents, la variationde vitesse et le contrôle du
couple dans les phasesd’accostage ayantpérennisé la mécanique.D’autres gains peuvent êtreinduits par l’autoprotectionliée au produit.Les gains de productivité
Choix du mode d'entraînement en fonction du temps de cycle et de la course
moteur asynchrone deux vitesses- cycle PV/GV- vitesse 0,12 à 0,45 m/s
course en mètres
temps en secondes
1
1
2
3
4
5
6
7
2 3 4 5 6 7
convertisseur de fréquence E/Fvitesse 1,2 m/s
CVF sans capteur vitesse 1,5 m/s
CVF avec capteur vitesse 2 m/s
figure 31
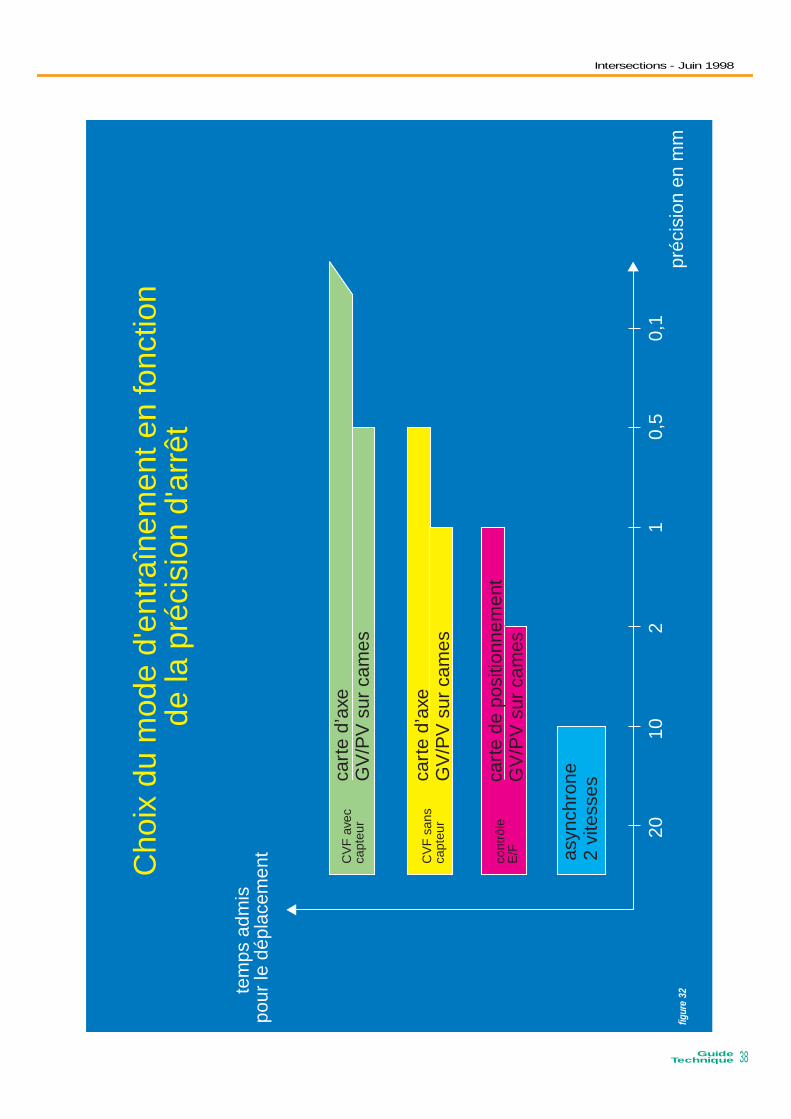
Choix du mode d'entraînement en fonction de la précision d'arrêt
20 10 2 1 0,5 0,1
carte d’axeGV/PV sur cames
carte d’axeGV/PV sur cames
carte de positionnement GV/PV sur cames
asynchrone 2 vitesses
CVF avec capteur
CVF sanscapteur
contrôleE/F
précision en mm
temps admis pour le déplacement
figure 32

GuideTechnique16
Intersections - Juin 1998
LevageDe façon générale lepositionnement est manuelmais les qualités requisesdes systèmes serontessentiellement rapidité etsouplesse d’utilisation, avecpar conséquent une parfaitemaîtrise de la charge auxbasses vitesses, voirejusqu’à l’arrêt.Les systèmes à CVF sanscapteur peuvent être utilisésgénéralement jusqu’à despuissances importantes(plusieurs centaines de kW),mais des critères desouplesse (notion de coupleà l’arrêt) et de sécurité(contrôle de la vitesse réelle)font préférer la solution aveccapteur. Le CVF avec capteur estnécessaire aussi sur lessystèmes automatiques oùla précision depositionnement demandéeest très importante.
Pour éviter le balancementde la charge, les rampes en«S» (dérivée del’accélération et de ladécélération constante)peuvent suffir sur les ponts-roulants à l’abri desperturbations extérieures.En extérieur les portiquesportuaires avec des vitesses
de déplacement élevées (2 m/s à vide, 1 m/s en charge) exigent uncontrôle de l’angle queprend la charge par rapport à la verticale (système SWAYTEL).Le système corrige lavitesse du mouvement de translation.
Nous ne parlerons pas icides nombreusesfonctionnalités «métier»qu’il est directementpossible de programmermaintenant sur lesvariateurs de vitesse.C’est aussi ce quidifférencie les produitscatalogués, car pour lesmoteurs asynchronesstandard, le CVF sanscapteur tend à segénéraliser, ceci sanssurcoût.Le meilleur contrôle ducouple est nécessaire pourl’utilisation des bassesvitesses. Il permet aussid’optimiser le courant, cequi est utile pour lespompes et ventilateurs.
Commande scalaire. 0,5 s/div
Courant (10 A/div)
Commande vectorielle sans capteur 0,5 s/div
figure 33 - Application ascenseur-descenseur
Afin d’illustrer la stabilitéobtenue, la figure 33présente ce que l’on peutobtenir en terme decourant, en phase dedécélération, avec unecommande scalairestandard et avec unecommande vectorielle sanscapteur.Sur une commandescalaire, en phased’accostage, apparaissentd’importantes instabilitésde courant qui provoquentdes à-coups mécaniquesgénérateurs d’usuresnotables et qui empêchentun positionnement précis.
Avec une commandevectorielle sans capteur, lepassage de grande à petitevitesse, visible sur la phaseélargie de la sinusoïde,assure une complètestabilité qui autorise, defaire du positionnementavec un moteur totalementstandard.
GuideTechnique17
Intersections - Juin 1998
Con
trôl
e U
/F o
u E
/F
Con
trôl
e sc
alai
re
Con
trôl
e V
ecto
riel d
e Te
nsio
n
Vec
tor V
olta
ge C
ontr
ol
Vec
tor
Pau
se M
odul
atio
n
● E
valu
atio
n de
la c
harg
e
● E
valu
atio
n de
la r
ésis
tanc
e st
ator
ique
● B
oost
man
uel /
aut
omat
ique
● L
oi E
/F a
utoa
dapt
ativ
e
Con
trôl
e ve
ctor
iel d
e flu
xav
ec o
u sa
ns c
apte
ur
● E
stim
ateu
r de
glis
sem
ent
● R
econ
nais
sanc
e de
s pa
ram
ètre
s m
oteu
rs (
Sta
tor
et R
otor
)
Tous
les
cont
rôle
s so
nt P
WM
Sin
us o
u M
LI S
inus
Les
2 te
chni
ques
Fie
ld O
rient
ed C
ontr
ol
Mot
eur A
sync
hron
e A
utop
iloté
Con
trôl
e en
tens
ion
Con
trôl
e en
cou
rant
Flu
x V
ecto
r C
ontr
ol
figur
e 01
GuideTechnique 18
Intersections - Juin 1998
L1 L2 L3
E/2
E/2
0U V W
N
Le c
ontr
ôle
MLI
figur
e 02

Gu
ide
Te
ch
niq
ue
19
Inte
rsections -
Juin
1998
U-0
E/2
-E/2
V-0
W-0
U-W
E -E
figur
e 03

GuideTechnique 20
Intersections - Juin 1998
tens
ion
entr
e ph
ases
50 H
z
20 H
z
-20
Hz
déta
il
figur
e 04

GuideTechnique21
Intersections - Juin 1998
1
2 3
θ0
t
1
2
3 θ
figur
e 05
GuideTechnique 22
Intersections - Juin 1998
E/2
– E
/2E
/2a
V
U
W
0U
VW
E/2
E/2
a
0U
VW
E/2
E/2
b
0U
VW
E/2
E/2
c
0U
VW
E/2
E/2
d
0U
VW
E/2
E/2
e
0U
VW
E/2
E/2
f
0U
VW
E/2
E/2
h
0U
VW
E/2
E/2
g
k
figur
e 06

GuideTechnique23
Intersections - Juin 1998
V W
U
dc
b
af
eg
h
b
a
U
X
0
T2 T
.b
T1 T
.a
figur
e 07

GuideTechnique 24
Intersections - Juin 1998
a a b h b
E/2U-0-E/2
t
V-0 t
W-0 t
U-V t
T1 T2 T0
T
figure 08

GuideTechnique25
Intersections - Juin 1998
L s =
indu
ctan
ce d
e fu
ite s
tato
rique
Rs
= r
ésis
tanc
e st
ator
ique
L m =
indu
ctan
ce m
utue
lle, i
nduc
tanc
e m
agné
tisan
te
Rr =
rés
ista
nce
roto
rique
L r =
indu
ctan
ce d
e fu
ite r
otor
ique
Le s
chém
a éq
uiva
lent
du m
oteu
r as
ynch
rone
I
=
I d +
Iq
mag
nétis
ant
flux
actif
co
uple
Vs
Rs
L sI
Es
L m I d
L r
Rr/
g
I q
figur
e 09

GuideTechnique 26
Intersections - Juin 1998
U
Fm
Um
F
Vm f
= c
te
U
Fm
Um
F
U
Fm
Um
F
C
F
A
BC
D
Ada
ptat
ion
en fr
éque
nce
Com
pens
atio
n de
glis
sem
ent
Com
pens
atio
n R
I aut
omat
ique
Cou
ple
indé
pend
ant d
e U
rés
eau
Loi U
/F a
dapt
ée à
l'ap
plic
atio
n
figur
e 10
GuideTechnique27
Intersections - Juin 1998
Ana
logi
e en
tre
les
mot
eurs
con
tinus
et a
ltern
atifs
B(c
ham
p)
F(f
orce
)
I.(c
oura
nt)
P
0
α
ILe c
ontr
ôle
vect
orie
l de
flux
Loi d
e La
plac
e
B
F
figur
e 11
GuideTechnique 28
Intersections - Juin 1998
Le m
oteu
r à
cour
ant c
ontin
u
φ =
Ki f
C =
k'φ
I
Pôl
e S
udP
ôle
Nor
d
I I
I fI f
F
F
Sen
s de
rota
tion
mot
eur
φ
figur
e 12
GuideTechnique29
Intersections - Juin 1998
I sta
tor
N S
φs
C =
k φ
r I s
φr
Le m
oteu
r sy
nchr
one
auto
pilo
té
figur
e 13

GuideTechnique 30
Intersections - Juin 1998
Le m
oteu
r as
ynch
rone
C =
k g
Us2
Us
Mac
hine
asy
nchr
one
élém
enta
irest
ator
trip
hasé
et r
otor
à c
age
i
t
i ui v
i wU
VW
Neu
tre
ϕ
figur
e 14

GuideTechnique31
Intersections - Juin 1998
Φs
θ
Le m
oteu
r as
ynch
rone
cham
ps s
tato
rique
et r
otor
ique
Rot
or
Sta
tor
Φr
f = p
Ns
N
fr =
gf
θ
Ns
= N
+ g
Ns
C =
k Φ
s Φ
r si
nθ
figur
e 15

GuideTechnique 32
Intersections - Juin 1998
I =
Id2 +
Iq2
La s
omm
e ve
ctor
ielle
Iq2
=>
cou
ple
2
cour
ant a
ctif
I2 moteur
I1 mot
eur
cour
ant r
éact
if Id
=>
flux
= c
onst
ante
(ju
squ'
à ω
n)
θ2
θ1
Iq1
=>
cou
ple
1
figur
e 16

GuideTechnique33
Intersections - Juin 1998
Le m
oteu
r éq
uiva
lent
bip
hasé
Φs
F
D
q
d
Q
idF
iqfig
ure
17
GuideTechnique 34
Intersections - Juin 1998
La tr
ansf
orm
atio
n de
Par
k
ϕ
i
t
i ui v
i w
UV
W
ϕ
i
t
i ai b
Ua
Ub
n
β
α
VW
UR
epèr
e tr
ipha
sé fi
xeG
rand
eurs
sin
usoï
dale
s
β
α
Rep
ère
biph
asé
fixe
Gra
ndeu
rs s
inus
oïda
les
A
B
figur
e 18

GuideTechnique35
Intersections - Juin 1998
La tr
ansf
orm
atio
n de
Par
kLe
pilo
tage
vec
torie
l
Φs
Rep
ère
biph
asé
tour
nant
Gra
ndeu
rs é
lect
rique
s co
ntin
ues
q (c
oupl
e)
d (f
lux)
φ s =
k1
Id
C =
k2
φs
I q
F
D
q
d
Q
idF
iq
figur
e 19

GuideTechnique 36
Intersections - Juin 1998
L'al
gorit
hme
type
d'un
e co
mm
ande
vec
torie
lle
M
réfé
renc
e flu
x
2/3
Iq
Im
Id
géné
rate
urM
LI 2/3
Iq
Im
Idca
lcul
éem
esur
éeou
cal
culé
e
inté
grat
eur
ωR
réfé
renc
evi
tess
e
IdId
Id'
IqIq
Iq'
réfé
renc
e co
uran
t / c
oupl
e
posi
tion
angu
laire
Ur,
s, t
Ir It
Id'
Iq'
ωs
ωR
ωg
γs
figur
e 20

Guide37
Intersections - Juin 1998
Cho
ix d
u m
ode
d'en
traî
nem
ent e
n fo
nctio
n du
tem
ps d
e cy
cle
et d
e la
cou
rse
mot
eur
asyn
chro
ne
deux
vite
sses
- cy
cle
PV
/GV
- vi
tess
e 0,
12
à 0,
45 m
/s
tem
ps
en s
econ
des
1
1234567
23
45
67
conv
ertis
seur
de
fréq
uenc
e E
/Fvi
tess
e 1,
2 m
/s
CV
F s
ans
capt
eur
vite
sse
1,5
m/s
CV
F a
vec
capt
eur
vite
sse
2 m
/s
figur
e 31
GuideTechnique 38
Intersections - Juin 1998
Cho
ix d
u m
ode
d'en
traî
nem
ent e
n fo
nctio
n de
lapr
écis
ion
d'ar
rêt
2010
21
0,5
0,1
cart
e d’
axe
GV
/PV
sur
cam
es
cart
e d’
axe
GV
/PV
sur
cam
es
cart
e de
pos
ition
nem
ent
GV
/PV
sur
cam
es
asyn
chro
ne
2 vi
tess
es
CV
F a
vec
capt
eur
CV
F s
ans
capt
eur
cont
rôle
E/F
préc
isio
n en
mm
tem
ps a
dmis
po
ur le
dép
lace
men
t
figur
e 32







