Download - LF Ship Dynamics

8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 1/8
P e rg a m o n
PII:S0967-0661 (96)00014-7
Control Eng. Practice,Vol. 4 , No. 3 , pp. 369-376, 1996Copyr igh t © 1996 E l s ev i e r Sc i ence L td
Pr inted in Great Br i ta in . Al l r ights reserved0967 -0661 /96 $15 .00 + 0 .00
I D E N T I F I C A T I O N O F D Y N A M I C A L L Y P O S I T I O N E D S H I P S
T.I. Fossen*, S.I. Sagatun** and A.J. Scrensen**
*Department of E ngineering Cybernetics, Norwegian University of Science an d Technology, No7034 Trondheim, Norw ay([email protected])
**ABB lndustri AS, Hasleveien 50, P.O. B ox 65 40 RodelCkka, N-0501 O slo, Norway
(Rece ived Augus t 1995 ; in f ina l fo rm Novem ber 1995)
A b s t r a c t . Toda y's model-based dy namic positioning (DP) system s require that the ship andthruster dynamics are known with some accuracy in order to use linear quadratic optimal controltheory. However, it is difficult to identify the ma them atical model of a dynam ically positioned (DP)ship, since the ship is not persistently excited un der DP. In addition, the ship param eter-estim ationproblem is nonlinear and multivariable, with only position and thruster state measurements avail-able for param eter estimation. The process and me asurem ent noise mu st also be modeled in order toavoid par am ete r drift due to environmental disturbances and sensor failure. T his article discusses anoff-line parallel extended Ka lm an filter (EKF ) algorithm utilizing two meas urem ent series in parallelto estim ate the par am eters in the DP ship model. Full-scale experiments with a supply vessel areused to demon strate the convergence and robustness of the proposed p aram eter estimator.
K ey W or ds . Dyna mic positioning system s, identification algorithms, full-scale sea trials, Kalm anfiltering, self-tuning control, marine systems, ship control.
1. I N T R O D U C T I O N
M o d e r n d y n a m i c p o s it i o n in g ( D P ) s y s t e m s a r eb a s e d o n m o d e l - b a s e d f e e d b a c k co n tr o l. T h e s t a t ee s t i m a t o r a n d c o n t r o l l a w a r e d e s i g n e d b y a p p l y -i n g a l o w - f r e q u e n c y ( L F ) m a t h e m a t i c a l m o d e l o ft h e s h i p m o t i o n s c a u s e d b y c u r r e n t s , w i n d a n d2 n d - o r d e r w a v e l o a d s , a n d a h i g h - f r e q u e n c y ( H F )m o d e l o f t h e l s t - o r d e r s h i p m o t i o n s c a u s e d b y l s t -o r d e r w a v e d i s t u r b a n c e s ; s e e ( F o ss e n , 1 9 9 4 ).
M o d e l - b a s e d c o n t r o l s y s t e m s u ti l iz i n g s t o c h a s t i co p t i m a l c o n t r o l t h e o r y a n d K a l m a n f i lt e r in g te c h -n i q u e s w e r e f i rs t e m p l o y e d w i t h t h e D P p r o b l e m
b y ( B a l c h e n et a l . , 1 9 7 6) . L a t e r e x t e n s i o n s a n dm o d i f i c a t i o n s o f t h i s w o r k h a v e b e e n r e p o r t e d b yB a l c h e n e t a l . ( 1 9 8 0 a , b ) , G r i m b l eet a l . ( 1 9 8 0 a ,b ) , F u n g a n d G r i m b l e ( 1 9 8 3 ) a n d S e e l i det a l .( 1 9 8 3 ) .
I n o r d e r t o a c h i e v e g o o d p e r f o r m a n c e o f t h e c o n -t r o l s y s t e m i t i s n e c e s s a r y t o h a v e a s u f f i c i e n t l yd e t a il e d m a t h e m a t i c a l m o d e l o f t h e s hi p . A B B I n -d u s t r i A S i n O s l o h a s m a r k e t e d a n e w s e l f - t u n i n gm o d e l - b a s e d D P s y s t e m b a s e d o n t h e r e s u l t s p r e -s e n t e d i n t h i s a r t ic l e . T h e i d e n t i f ie d m o d e l i s u s e da s b a s is f o r t h e c o n t r o l s y s t e m d e s i g n . T h i s s i m -
p l if ie s th e t u n i n g o f t h e c o n t r o l l a w. T h e c o n t r o ls y s t e m d e s i g n i s d i s c u s s e d i n d e t a i l b y ( S c r e n s e net a l . , 1995) .
2. S H I P A N D T H R U S T E R M O D E L S
T h i s s e c ti o n d e s c ri b e s th e m a t h e m a t i c a l m o d e l o ft h e t h r u s t e r s a n d t h e L F m o t i o n o f t h e s h i p .
2.1. T h r u s t e r M o d e l
M o s t D P s h i p s u s e t h r u s t e r s a n d m a i n p r o p e l l e r st o m a i n t a i n t h e i r p o s i t i o n a n d h e a d i n g . T h et h r u s t f o r c e o f a p i t c h - c o n t r o ll e d t h r u s t e r c a n b ea p p r o x i m a t e d b y :
F(n,p)=
K(n) IP- P01 ( P - P0)(1 )
w h e r e t h e f o r c e c o e f f i c i e n tK ( n ) i s a s s u m e d t o b ec o n s t a n t f o r c o n s t a n t p r o p e l l e r r e v o l u t i o n n , P i st h e " t r a v e l e d d i s t a n c e p e r r e v o l u t i o n " , D i s t h ep r o p e l le r d i a m e t e r a n d :
p = P / D (2 )
i s t h e p i t c h r a t i o . P 0 is p i t c h r a t i o o f f - s e t d e f i n e ds u c h t h a t p = P0 y ie l d s z e r o t h r u s t , t h a t i s :
F ( n , p 0 ) = 0 . ( 3 )
T h r u s t F o r c e s a n d M o m e n t . T h e t h r u s t f o r c e sa n d m o m e n t v e c t o r ~" E R 3 ( s u rg e , s w a y a n d y a w )
36 9

8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 2/8
370 T.I . Fossenet al.
~ . = : ~ L I ~ _ _ ~ _ ' _ - . - 7 < - S - . -z - w - . . . . J ~ ~ " . . . . ' -
F i g . 1 . P i c t u r e s h o w i n g t h e s u p p l y v e s s e l w h i c h w a s u s e d d u r i n g t h e s e a t r i a l s i n t h e N o r t h S e a ( L = 7 6 . 2 m ) .
m a i n p r o p e l l e r ( k N )
. o o . . . . i . . . . . . . . ! . . . . . . . . i . . . . . . . .
2 0 0 -- -i . . . .. . . . i . .. . . .. .. . . - . - ~ . . . ..
) Y ~ e
- 1 - 0 . 5 0 0 . 5 1P / D
2 0 0t u n n e l t h r u s t e r ( k N )
1 5 0 . - : . . . .
1 O 0i i i i ~ i
5 0 . . . . ::. . . . . :,. . . . . . . . . . . . . ~ . . . . . . i
0
- 5 0
- 1 0 0
- 1 5 0
- 2 0 0- 1 - 0 . 5 0 0 . 5
P / D
F i g . 2 . E x p e r i m e n t a l l y m e a s u r e d t h r u s t ( a s t e r is k s ) a n d t h r u s t e r m o d e l a p p r o x . E q . ( 1 ) v e r s u sp = P / D . L e f tp l o t: F ( 1 2 2 , p ) - - 3 7 0 p i p [ a n d F ( 1 6 0 , p ) = 6 5 5 p [ p [. R ig h t p l o t: F ( 2 3 6 , p ) = 1 3 7 p[ p [. P r o p e l le r r e v o lu t i o ni s in rpm.
f o r t h e s u p p l y v e s se l in F i g u r e 1 c a n b e w r i t t e n :
r = T K u (4)
w h e r e u E l~ r i s a c o n t r o l v a r i a b l e d e f i n e d a s :
u = [[Pl - P lo[ (P l - PlO), [P2 - P2o[(P2 - P2 o),
• . , [P r - P ro l (Pr - P ro) ] T (5 )
w h e r e Pio ( i = 1 . .. r ) a r e t h e p i t c h r a t i o o f f - s e t s f o rt h r u s t e r N o . i a n d r is t h e m a x i m u m n u m b e r o ft h r u s t e r s .
Thru s t Fo rce Coe ff i c ien t Ma t r ix .T h e t h r u s t f o rc ec o e f fi c ie n t m a t r i x K i s a d i a g o n a l m a t r i x o f t h r u s tf o r c e c o e f f i c i e n ts d e f i n e d a s :
K = d i a g { K l ( n l ) , K 2 ( n 2 ) , ...,K r ( n r ) } (6 )
w h e r e n i ( i = 1 . .. .r ) i s t h e p r o p e l l e r r e v o l u t i o n o fp r o p e l l e r n u m b e r i. T h e th r u s t f o r c e sK i ( n i ) u ia r e d i st r i b u te d t o t h e s u rg e , s w a y a n d y a w m o d e sb y a 3 x r t h r u s t e r c o n f i g u r a t i o n m a t r i x T .
Thrus t e r Conf igu ra t i on Ma t r ix .C o n s i d e r t h e s h i pi n F i g u r e 1 , w h i c h i s e q u i p p e d w i t h t w o m a i n p r o -p e ll e rs , t h r e e t u n n e l t h r u s t e r s a n d o n e a z i m u t ht h r u s t e r w h i c h c a n b e r o t a t e d t o a n a r b i t r a r y a n -g l e a . T h e c o n t r o l v a r i a b le s a r e a s s ig n e d a c c o r d -i n g t o :
U l =
U 2 - -
U 3
U 4 =
U 5
U 6 =
p o r t m a i n p r o p e l l e rs t a r b o a r d m a i n p r o p e l le ra f t t u n n e l t h r u s t e r Ia f t t u n n e l t h r u s t e r I Ib o w t u n n e l t h r u s t e rb o w a z i m u t h t h r u s t er .
T h e f o l lo w i n g t h r u s t e r c o n f i g u r a t i o n m a t r i x i s o b -t a i n e d :
T =1 1 0 0 0 cos c~ l0 0 1 1 1 s in~ ) (7 )
/ 1 - - / 2 - - 1 3 - - / 4 / 5 /6 s i n a
w h e r e l i ( i = 1 . .. 6 ) a r e t h e m o m e n t a r m s i n y a w.I t i s a l s o s e e n t h a t 12 = 11 ( s y m m e t r i c a l l o c a t i o n o f

8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 3/8
Identification o f Dyna mically Positioned Ships 371
m a i n p r o p e l le r s ). T h e t h r u s t d e m a n d s a r e d e fi n e ds u c h t h a t p o s i t i v e t h r u s t f o r c e / m o m e n t r e s u l ts inp o s i t i v e m o t i o n a c c o r d i n g t o t h e v e s s e l ' s p a r a l l e la x i s s y s t e m , d e f in e d s u c h t h a t p o s i t i v e x - d i r e c t i o ni s f o r w a r d s , p o s i t i v e y - d i r e c t i o n i s s t a r b o a r d a n dp o s i t i v e z - d i r e c t i o n i s d o w n w a r d s . T h e o r ig i n isl o c a t e d i n t h e c e n t e r o f b u o y a n c y.
f i n e d a c c o r d i n g t o ( 9 ) s u c h t h a t :
r o l l = m - X a m 2 3 =m x G - - Y ÷m22 = m - Y9 m33 = I~ - N÷.
(12 )
2.3. K i n e m a t i c s
T h e k i n e m a t i c e q u a t i o n o f m o t i o n f o r a s h i p is :
2 .2 . L F S h ip D y n a m i c s
T h e L F s h ip m o d e l i n s u rg e , s w a y a n d y a w c a n b ed e s c r i b e d b y ( F o s s e n 1 9 9 4 ) :
/7 = J ( w ) v ( 1 3 )
w h e r e W = [ x, y, ¢ ] T a n d J ( w ) i s a r o t a t i o n m a t r i xd e f i n e d a s :
M I ) + C ( v ) v + D ( u - u c ) = ~" + w ( 8 )
w h e r e v = [ u ,v, r] T d e n o t e s t h e L F v e l o c i t y v e c -t o r , v c = [uc,vc,rc] T i s a v e c t o r o f c u r r e n t v e l o c -i ti e s, 7 - i s a v e c t o r o f c o n t r o l f o r c e s a n d m o m e n t sa n d w = [Wl ,W2,W3] Ti s a v e c t o r o f z e r o - m e a n
G a n s s i a n w h i t e n o i s e p ro c e s s e s d e sc r i b in g u n m o d -e ll ed d y n a m i c s a n d d i s t u r b a n c e s . N o t i c e t h a t r ,d o e s n o t r e p r e s e n t a p h y s i c a l c u r r e n t v e l o c i t y, b u tc a n b e i n t e r p r e t e d a s t h e e f f ec t o f c u r r e n t s i n y a w.T h e c u r r e n t s t a t e s a r e u s e fu l in t h e p a r a m e t e r e s -t i m a t o r s in c e t h e y r e p r e s e n t s l o w l y - v a ry i n g n o n-z e r o b i a s t e r m s .
c o s ¢ - s i n e 0 ]d ( r / ) = s i n e c o s ¢ 0 .
0 0 1(14)
3 . O F F - L IN E P A R A M E T E R E S T I M A T O R
T h e o f f- li ne p a r a m e t e r e s t i m a t o r i s b a s e d o n t h es t a t e a u g m e n t e d e x t e n d e d K a l m a n f i l t e r ( E K F ) .
3 .1 . S t a t e A u g m e n t e d E x t e n d e d K a l m a n F i l t e r
C o n s i d e r t h e f o l lo w i n g n o n l i n e a r s y s t e m :
T h e i n e r t i a m a t r i x i n c l u d i n g h y d r o d y n a m i c a d d e dm a s s t e r m s i s a s s u m e d t o b e p o s i t i v e d e f i n i t eM = M T > 0 f o r a d y n a m i c a l l y p o s i t i o n e d s h i p ,w h e r e a s D > 0 is a s t r i c t l y p o s i t i v e m a t r i x r e p r e -s e n t in g li n e a r h y d r o d y n a m i c d a m p i n g . N o n l i n e a rd a m p i n g i s a s s u m e d t o b e n e g l i g ib l e f o r s t a t i o n -k e e p i n g o f s h i ps , w h e r e a s t h e a s s u m p t i o n o f s ta r -b o a r d a n d p o r t s y m m e t r y i m p li es t h a t M a n d Dc a n b e w r i t t e n :
x ( k + 1) = / ( x ( k ) , 'o , ( k ) , 0 ( k ) ) + W l ( k ) (1 5)0 ( k + 1 ) = 0 ( k ) + r / ( k ) ( 16 )
w h e r e x E l ~ n is t h e s t a t e v e c t o r , u E R r i s t h ei n p u t v e c t o r, 8 E l ~ p i s t h eu n k n o w n p a r a m e t e r
v e c t o r t o b e e s t i m a t e d a n d w l , ~7 E R n a r e z e r o -m e a n G a n s s i a n w h i t e n o i se p r o ce s s e s. T h i s m o d e lc a n b e e x p r e s s e d in a u g m e n t e d s t a t e - s p a c e f o r ma s :
m - X u 0 0 ]M = 0 m - Y ~ m x G - Y ÷ (9 )
0 r n x a - - Y ÷ I z - N ÷
0 ]D = o -Yo -Y~ . (10)
0 - - N v - N r
T h e C o r io l is a n d c e n t r i f u g a l m a t r i x C ( v ) i s i n-
c l u d ed i n t h e m o d e l t o i m p r o v e t h e c o n v e r g e n c eo f t h e p a r a m e t e r e s t i m a t o r . M o r e o v e r , t h is m a -t r i x m a y b e s i g n i fi c a n t fo r a s h i p o p e r a t i n g a ts o m e sp e e d , w h e r e a s C ( v ) = 0 f o r a sh i p a t re s t .I t s h o u ld b e n o t e d t h a t i n c lu s io n o f C ( v ) i n t h em o d e l w i ll n o t i n c r ea s e t h e n u m b e r o f p a r a m e t e r st o b e e s t i m a t e d , s i n c e C ( v ) i s o n l y a f u n c t i o n o ft h e e l e m e n t s m i j o f t h e i n e r t i a m a t r i x ; s e e T h e -o r e m 2 . 2. o n p a g e 2 7 i n (F o s s e n , 1 9 9 4 ) . I n f a c tM = ( m ~ j } y i e l d s :
C ( v ) -=
[ 0 00 0 m l l U ( 11 )- ~ 2 v + - ~ 3 r - m l l u 0
w h e r e t h e n o n - z e r o e le m e n t s m i j =- m j i a r e d e -
~ ( k + 1 ) = ~ : ( ~ ( k ) , u ( k ) ) + w ( k ) ( 1 7 )
w h e r e ~ = [x T, o T ] T i s t h e a u g m e n t e d s t a t e v e c -to r, w = [Wl ,~T]Tand:
~ : ( ~ ( k ) , u ( k ) ) = [ S ( x ( k l ' u ( k l ' 0 ( k l )0 ( k ) ( 1 8 )
F u r t h e r m o r e , i t i s a s s u m e d t h a t t h e m e a s u r e m e n te q u a t i o n c a n b e w r i t t en :
z ( k ) = n ( ~ ( k ) ) + v ( k ) (19)
w h e r e z E R m a n d m i s t h e n u m b e r o f s e n-s o rs . T h e d i s c r e t e - ti m e e x t e n d e d K a l m a n f i lt e ra l g o r i t h m i n Ta b l e 1 c a n t h e n b e a p p l i e d t o e s t i-m a t e ~ = [x T, o T ] T i n ( 17 ) b y m e a n s o f th e m e a -s u r e m e n t ( 1 9 ) . F o r d e t a i l s o n t h e i m p l e m e n t a t i o ni s s u e s , s e e ( G e l b et al . , 1 9 8 8 ) .
3 .2 . O ff - L i n e E K F f o r P a r a ll e l P ro c e s si n g
I n o r d e r t o i m p r o v e t h e c o n v e r g e n c e a n d p e r f o r -m a n c e o f th e p a r a m e t e r e s t i m a t o r, t h e s a m e q u a n -

8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 4/8
37 2 T.I . Fossen e t al .
Ta b l e 1 S u m m a r y o f d i s c r e te - t im e e x te n d e d K a l m a n f il te r ( E K F ) .
S y s t e m m o d e lM e a s u r e m e n t
I n i t i a l c o n d i t i o n s
S t a t e e s t i m a t e p r o p a g a t i o n
E r r o r c o v a r i an c e p r o p a g a t i o nG a i n m a t r i x
S t a t e e s t i m a t e u p d a t eE r r o r c o v a r ia n c e u p d a t e
Def i n i t i on s
{ ( k + 1 )= . ~ ( { ( k ) , u ( k ) ) + I 'w ( k ) ;z ( k ) = n ( ~ ( k ) ) + v ( k ) ;
w ( k ) , , ~ N ( O , Q ( k ) )v ( k ) , , ~ N ( O , R ( k ) )
~ ( 0 ) = ~ 0 ; p ( 0 )= P o~(k + 1) = ~ ( ~ ( k ) , u ( t ) )
P ( k + 1 ) = 4 ~ (k ) P ( k )~ T ( k ) + I ' ( k ) Q ( k )r r ( k )K ( k ) = - P ( k ) H T ( k ) [ H ( k ) - P ( k ) H T ( k ) +R ( k ) ] - '
~(k) = -~(k) + K (k )[z (k ) - 7 - / (~(k) ) ]P ( k ) = [ I - K ( k ) H ( k ) ] - P ( k ) [ I - K ( k ) H ( k ) ] T
+ K ( k ) R ( k ) K T ( k )o . ~ • o T - I .
t i t y c a n b e m e a s u r e d N > 2 t i m e s f o r d i ff e r-e n t e x c i t a t i o n s e q u e n c e s . M o r e o v e r , l e t th e i n p u tu i E l ~ r c o r r e s p o n d t o t h e s t a t e v e c t o r x i E 1~n
a n d m e a s u r e m e n t v e c t o r z i e R r n f o r (i = 1 . . .N ) .U n d e r t h e a s s u m p t i o n o f c o n s t a n t p a r a m e t e r s , t h ep a r a m e t e r v e c t o r 0 E IRp w i l l b e t he s am e fo r a l lt h e s e s u b s y s t e m s . T h i s c a n b e e x p r e s s e d m a t h e -m a t i c a l l y a s :
X l ( k + l ) =
x 2 ( k + l ) =
X N ( k + l ) =0 ( k + l ) =
f (X l(k) , U l (k) , 0 (k) ) -b W l(k)f(x 2( k) , u2(k ) , 0(k)) -Jr-?M2(k)
f(XN(k),UN(k),O(k)) +W)N(k)O ( k ) + n ( k ) ( 2 0 )
w i t h m e a s u r e m e n t s :
z , ( k ) =
z 2 ( k ) =
Z N ( k ) =
h l ( X l ( k ) , 0 ( k ) ) -4 - V l (] e)h2(x2(k) , O(k) ) + v2(k)
hN(X N(k), O (k)) q- VN(k).(21)
H e n c e , t h i s s y s t e m c a n b e w r i t t e n i n a u g m e n t e ds t a t e - s p a c e f o r m a c c o r d i n g t o :
~ ( k + l ) = . ~ ' ( ~ ( k ) , u ( k ) ) + w ( k ) (22)
z ( k ) = 7 " ~ ( ~ ( k ) ) + v ( k ) (23)
w h e r e u = [ u T , . . . , u ~ ] T, z = [ z T , . . . , z ~ ] T, ~ =[ X ~ , . . . , X ~ , o T ] Ta n d :
~ ' ( ~ ( k ) , u ( k ) ) =
n ( ~ ( k ) ) =
f(Xl(k) ,~1 (k), 0(k ))f ( x 2 ( k ) , u 2 ( k ) ,O(k))
y(xN(k),uN (k), O(k))o(~)
h(xl(k),O(~))
h(~2(k),O(k))
h(XN(k),O(k))
( 2 4 )
( 2 5 )
I t is o b s e r v e d t h a t d i m x =N n + p ,d i m u = N ra n d d i m z = N m . I t i s t h e n e v i d e n t t h a t m o r ei n f o r m a t i o n a b o u t t h e s y s t e m i s o b t a i n e d b y u s i n g
m u l t i p l e m e a s u r e m e n t s e q u e n c e s . I n c r e a s e d in f o r -m a t i o n i m p r o v e s p a r a m e t e r i d e n t i f i a b i l i t y a n d r e -d u c e s t h e p o s s ib i l i ty f o r p a r a m e t e r d r i f t . H o w e v e r ,i t s h o u l d b e n o t e d t h a t p a r a l l e l p r o c e s si n g im p l i e st h a t t h e p a r a m e t e r e s t im a t i o n m u s t b e p e r f o r m e doff - l ine .
F o r s h i p a p p l i c a t i o n s s i g n i f ic a n t p e r f o r m a n c e i m -p r o v e m e n t h a s a l r e a d y b e e n r e p o r t e d f o r N = 2 ;s ee (Abk owi t z , 1975 , 1980 ; Hw ang , 1 980 ).
i 1 1" Yl
p2 Eq.3 u 2 SHIP - = v2
M i5k
Fig . 3 . Para l le l conf igura t ion of EK F for N = 2 .
4 . I D E N T I F I C A T I O N O F A S U P P LY V E S S E L
F u l l - s c a l e e x p e r i m e n t s w i t h t h e s u p p l y v e s s e l i nF i g u r e 1 w i ll b e u s e d t o d e m o n s t r a t e t h e c o n v e r -g e n c e o f t h e p r o p o s e d p a r a m e t e r - e s t i m a t i o n a lg o -r i t h m .
4 .1 . Sys tem Iden t i f i ca t ion Mode l
T h e s y s t e m i d e n t i f i c a t i o n m o d e l i s b a s e d o n t h em a t h e m a t i c a l m o d e l p r e s e n t e d i n S e c t i o n 2 . A s -s u m i n g n o e n v i r o n m e n t a l d i s tu r b a n c es , a d y n a m -i c a l l y p o s i t i o n e d s h i p c a n b e d e s c r i b e d b y t h ef o l lo w i n g n o n - d i m e n s i o n a l m o d e l ( B i s - s y s te m ) i nsu rge , sw ay and yaw ( s ee p age 178 i n (Fo s sen ,

8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 5/8
Identification of Dynamically Positioned Ships 37 3
1994)) :
M " i / ' + C " ( t / ' ) v " + D " v " = T " K " u "(26)
w h e r e
M "
D " [1 - X ~ 0 0 ]
0 1 - Y! ' x" Y" (27)" y y ~ - - , ,
- - k z - - I V ÷x G r
= o - v ~ ' , - W ' • ( 2 8 )0 -- N v" - N r"
T h e t h r u s t e r c o n f i g u r a t i o n m a t r i x w a s c o m p u t e dto b e :
u 3 , u 4 a n d u s . Tw o m a n e u v e r s s h o u l d b e p e r -f o r m e d ; s e e F i g u r e 6 .
( 3 ) a z i m u t h t e s t : t h e l a st t e s t i nv o lv e s r u n n i n gt h e a z i m u t h t h r u s t e r u 6 a l o n e. T w o m e a s u r e -men t s e r i e s a r e r equ i r ed ; s ee F igu re 7 .
4 .3 . I m p l e m e n t a t i o n I s s u e s
Th i s imp l i e s t ha t a t l e a s t 6 s ea tr i a l s mus t be pe r-fo rm ed fo r N - - 2 . T he f i r s t t wo s ea tr i a l s a r e u sedt o i d e n t if y t h e p a r a m e t e r s K ~ ' = K ~ ' a n d X " i nt h e d e c o u p l e d s u rg e e q u a t i o n :
1.0000 1.0000 0
T" = 0 0 1.0000
0 . 0 4 7 2 - 0 . 0 4 7 2 - 0 . 4 1 0 8
0 0 0 ]1.oooo 1 .oo oo 1 .oooo (29)
-0 .3858 0 .455 4 0 .3373
wh e rea s K " = d i ag {K l ' , K~ ' , K~ ' , K~ ' , K~ ' , K~ ' } i st h e u n k n o w nm a t r i x t o b e e st i m a t e d . I n a d d i ti o nt o t h i s i t w i ll b e a s s u m e d t h a t D " i su n k n o w n .An a p r i o r i e s t ima t e o f M ' 1 i s c a l cu l a t ed by ap -p l y i n g s e m i - e m p i r i c a l m e t h o d s . F o r m o r e d e t a i lsa b o u t t h e c o m p u t a t i o n o f t h e a d d e d m a s s d e r iv a -t ives i , , , (Fa l t i nsen , 1990) .t~ , Y~ , N r an d Y~', seeT h e i n e r t i a m a t r i x M " w a s c o m p u t e d t o b e :
1 . 1 2 7 4 0 0 ]M " = 0 1 .890 2 -0 .0744 . ( 30 )
0 -0.0744 0.127 8
H e n c e K '1 a n d D " a r e t h e o n l y r e m a i n i n gu n-k n o w n m a t r i c e s i n t h e D P m o d e l ( 2 6 ) .
4 .2 . Sea Tr ia ls
I n o r d e r t o i m p r o v e t h e c o n v e rg e n c e o f t h e p a -r a m e t e r e s t i m a t o r i t i s p r o p o s e d t o u s e s e v er a l of f-l i n e m e a s u r e m e n t s e r i e s g e n e r a t e d b y a n u m b e r o fc a r e f u l l y p r e d e f i n e d m a n e u v e r s . F o r i n s ta n c e , i ti s a d v a n t a g e o u s t o d e c o u p l e t h e s u rg e m o d e f r o mt h e s w a y a n d y a w m o d e s i n o r d e r t o i m p r o v e t h ec o n v e r g e n ce o f t h e p a r a m e t e r e s t i m a t o r . T h i s i sm o t i v a t e d b y t h e b l o c k d ia g o n a l s t r u c t u r e o f M "a n d D ' .
Decoup led Sh ip Maneuve r s . T h e f o l l o w i n g t h r e ed e c o u p l e d s h i p m a n e u v e r s a r e p r o p o s e d :
( 1 ) u n c o u p l e d s u r g e : t h e sh i p i s o n l y a l lo w e dt o m o v e i n s u rg e ( c o n s t a n t h e a d i n g ) b y m e a n so f t h e m a i n p r o p e l l e r s u l a n d u 2 . T h e h e a d -i n g i s c o n t r o l l e d b y m e a n s o f o n e o f t h e b o wt h r u s t e r s . A t l e a s t t w o m a n e u v e r s s h o u l d b e
p e r f o r m e d ; s e e F i g u r e 5 .( 2 ) c o u p l e d s w a y a n d y a w : t h e s hi p s h ou l dp e r f o r m t w o c o u p l e d m a n e u v e r s i n s w a y a n dy a w b y m e a n s o f t h e t h r e e t u n n e l t h r u s t e r s ,
1 1 1 " I f 1 1 1 1 I I I 1 I I I I
- X~) u - = +K1 u l K2 u2,,u (31)
} " ---- u " ( 3 2 )
w h e r e X ~ / i s c o m p u t e d b y u s i n g s t r i p t h e o r y( F a l t i n se n , 1 99 0 ) . T h e p a r a m e t e r v e c t o r c o r -
r e s p o n d i n g t o t h i s s y s t e m i s d e n o t e d a s 0 ~ ' =^ II
t-*lrr"", LuJY'0T" T he es t im at ed pa ra m et er ve ct or 01i n su rge i s f rozen a n d u s e d a s i n p u t f o r t h e s e c -o n d s y s t e m i d e n t i f i c a t io n s c h e m e ( S I 2 ), t h a t i s t h ecoup l ed sway and yaw iden t i f i c a t i on . S imi l a r l y,t h e o u t p u t f r o m t h e s e co n d p a r a m e t e r - e s t i m a t i o n
^ I I
s cheme 02 i s f rozen a n d u s e d a s in p u t f o r t h el a s t p a r a m e t e r - e s t i m a t i o n s c h e m e ( S I 3 ) , t h a t i s^ II
0 3 . T h e l a s t s c h e m e i s u s e d t o e s t i m a t e o n l y o n ep a r a m e t e r , t h a t i s 0 N = K ~ ' w h e r e a s t h e s e c o n dp a r a m e t e r - e s t i m a t i o n s c h e m e i s u s e d t o e s t i m a t et h e c o u p l i n g t e r m s i n s w a y a n d y a w ; s e e F i g u r e4 . I n t h e la s t t w o p a r a m e t e r - e s t i m a t i o n s c h e m e s
U l u 2 u 3
I Yl I Y2 I Y3
Fig . 4 . Decoupled parameter es t imat ion in te rms ofthree sys tem ident i f ica t ion schemes SI1-SI3 .
t h e s h i p i s c o m m a n d e d t o c h a n g e h e a d i n g d u r i n gt h e m a n e u v e r s , w h i c h i m p l i e s t h a t t h e n o n l i n e a rk i n e m a t i c e q u a t i o n :
/ / " = J " ( v " ) # ' ( 33 )
whe re ~ /" = Ix " , y " , ¢ , , ]T, shou ld be u sed t o ge th e rw i t h t h e d y n a m i c m o d e l ( 26 ) . H e n c e t h eu n k n o w np a r a m e t e r v e c t o r c o r r e s p o n d i n g t o s e a t r ia l 2 is0' ' = [y" , y " , , , , , , , K~,]T~ ,, N ' , K 3 , . I n t h i s e x a m p l et h e t u n n e l t h r u s t e r s a t t h e s t e r n a r e o f s a m e t y p e
(K~ ' = K~ ' ) . I t is co nv en i en t t o r ewr i t e ( 26 ) and(33 ) i n t e rms o f t he ve s se lm o m e n t u m :
h " - - M " v " ( 34 )

8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 6/8
374 T.I . Fossene t a l .
1 5 0 0s u r g e p o s i t i o n [ m ]
1 0 0 0 .
5 0 0
0 ~ . . . . . . . . . . . . . . . . . . . . . .
- 50 ~ On 2 0 0 4 0 0 6 0 0
1 3 5
s a m p l e s
y a w a n g l e [ d e g ]
1 3 4
1 3 3
1 3 2
1 3 1
1 3 C2 0 0 4 0 0 6 0 0
s a m p l e s
4s u r g e v e l o c i t y [ m / s ]
3
2
1
0
-10
1 0 0
5 0
0
- 5 0
- 1 0 ( ~
2 0 0 4 0 0s a m p l e s
P / D m a i n p r o p e l l e r s [% ]
6 0 0
2 0 0 4 0 0 6 0 0s a m p l e s
Fig . 5 . Sea Tr ia l 1 : Fu l l - sca le exper iment wi th a supp ly vesse l (uncoupled surge) .
x y - p l o t [ m ]5 0 2 5 0
0
- 5 0
- 1 0 ( ~ ' 0 0 5 0 1 0 0 1 5 0
1 0 0P / D s t e r n t h r u s t e r s [ % ]
5 0
0
- 5 0
- 1 0 C 2 0 0 4 0 0 6 0 0s a m p l e s
y a w a n g l e [ d e g ]
2 0 0
1 5 0
1 0 U0 -- 2 0 0 4 0 0 6 0 0
1 5 0
s a m p l e s
P / D b o w t h r u s t e r [% ]
1 0 0 [ . . . .
: : : o 2 0 0 4 0 0 6 0 0s a m p l e s
F i g . 6 . S e a Tr ia l 2 : F u l l - sc a l e e x p e r i m e n t w i t h a s u p p l y v e s se l ( c o u p l e d s w a y a n d y a w ) .
x y - p l o t [ m ] y a w a n g l e [ d e g ]1 0 2 0 0
0
- 1 0
- 2 0
-~_~0 0 5 0 1 0 0
y a w a n g l e r a t e [d e g / s ]
0 . 5
0
- 0 . 5
- 1 . . . .
- 1 . ~4 0 0 6 0 0
s a m p l e s
1 5 0
1 O 0
5 0
%5 0 2 0 0 4 0 0 6 0 0s a m p l e s
~ l m u t h t h r u s t e r [% ]100''" 1- 5 0 f
- 1 O 0 "
- t % i i 6 0 0s a m p l e s
Fig . 7 . Sea Tr ia l 3 : Fu l l - sca le exper iment wi th a supp ly vesse l ( az imuth t es t ) .
8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 7/8
Identification of Dynam ically Positioned Ships
A h e l e m e n t s
o . 4 ! ! , !
o .2 . . . . . . . . . . . . . , . . . . . . . . . . . . .
• i i ~
0
- 0 . 2 -
i : :
- 0 . 4 I , , I1 O 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0
s a m p l e s
x 10 .3 K e l e m e n t s2 0 T " T 1 I I"
1 5
1 0
5
O
i i- 5 . i
0 1 O 0 2 0 0 3 0 0 4 0 0 5 0 0 6 0 0
s a m p l e s
37 5
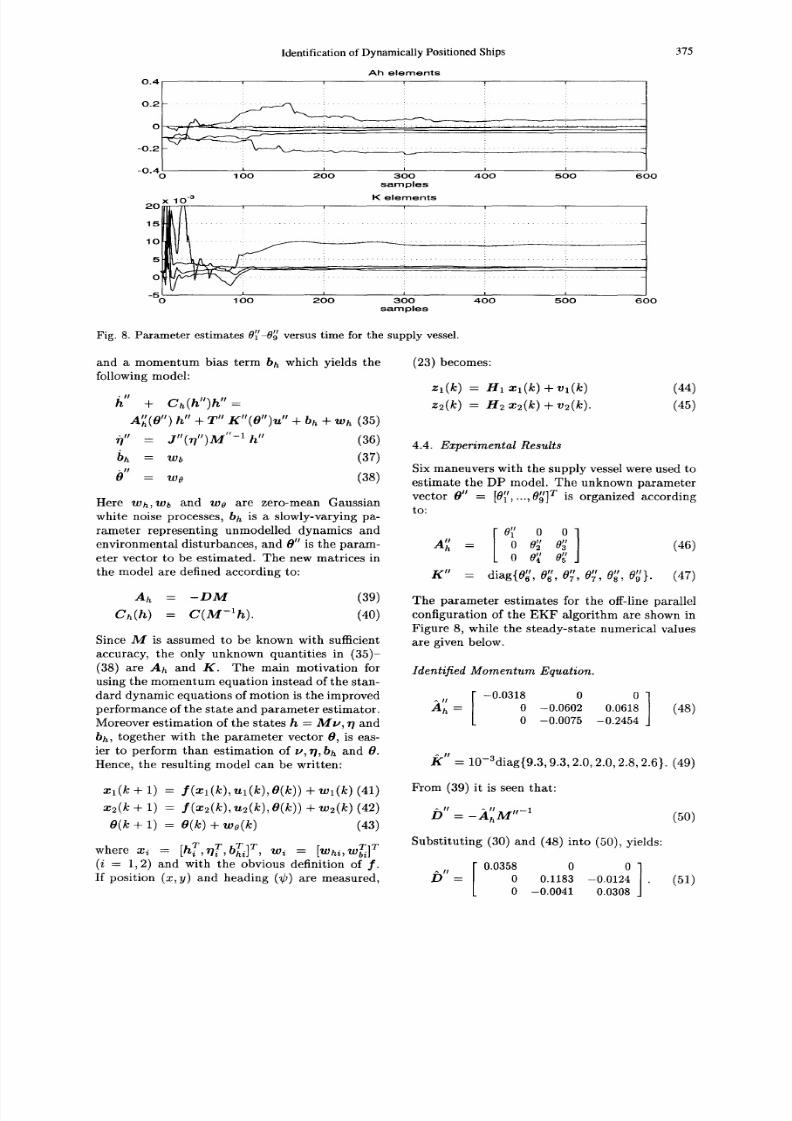
tt t,Fig . 8 . Parameter es t imates 01-09 versus t ime for the supply vesse l .
( 2 3 ) b e c o m e s :
z l ( k ) = H 1 x l ( k ) + v l ( k )
z 2( k) - - H 2 x 2 ( k ) + v 2 ( k ) .
a n d a m o m e n t u m b i as te r mbh w h i c h y i e l d s t h ef o l l o w i n g m o d e l :
( 4 4 )• H
h + C h ( h " ) h " = (45)
A ~ ( O " ) h " + T " K " ( O " ) u " + bh + W h(35 )
• = ' " - h "f ' J ' ( r f ' ) M 1 ( 36 )
bh = wb (37 )
/ ¢ ' = w 0 ( 3 8 )
H e r e W h , W b a n d w e a r e z e r o - m e a n G a u s s i a n
w h i t e n o i s e p r o c e s s e s ,bh i s a s l o w l y - v a r y i n g p a -r a m e t e r r e p r e s e n t i n g u n m o d e l l e d d y n a m i c s a n d [O'x' 0 0 ~ ]e n v i r o n m e n t a l d i s t u r b a n c e s , a n d0" i s t he pa ra m - A~ = 0 0~' ( 46 )e t e r v e c t o r t o b e e s t i m a t e d . T h e n e w m a t r i c e s i n 0 0~' 0"5the m ode l a r e de f ined acco rd ing t o : g " = d iag{O~ ', 0~ ' , 0~ ' , 0~ ' , 0~ ' , 0~ '} . ( 47 )
A h = - D M (39 )
C h (h ) = C ( M - l h ) . (40 )
S i n c e M i s a s s u m e d t o b e k n o w n w i t h s u f f ic i e n ta c c u r a c y, t h e o n l y u n k n o w n q u a n t i t i e s i n ( 3 5 ) -(38 ) a r e A h a n d K . T h e m a i n m o t i v a t i o n f o r
u s i n g t h e m o m e n t u m e q u a t i o n i n s t e a d o f t h e s t an -d a r d d y n a m i c e q u a t i o n s o f m o t i o n i s t h e i m p r o v e d ^ ,, [ - 0 . 0 3 1 8 0 0 ]p e r f o r m a n c e o f t h e s t a t e a n d p a r a m e t e r e s t i m a t o r . A h = [ 0 -0 .06 02 0 .0618 J (48)M o r e o v e r e s t i m a t i o n o f t h e s t a t e s h = M v, y a n d 0 - 0 .0 0 7 5 - 0 .2 4 5 4bh , t o g e t h e r w i t h t h e p a r a m e t e r v e c t o r 8 , i s e a s -i e r t o p e r f o r m t h a n e s t i m a t i o n o f v, ~?,bh a n d 0 .H e n c e , t h e r e s u l t i n g m o d e l c a n b e w r i t t e n :
x ~ ( k + 1) = f ( X l ( k ) , ' U l ( k ) , O ( k ) ) +W l ( k ) ( 41 )
x e ( k + 1) = f ( x 2 ( k ) , u 2 ( k ) , O ( k ) ) + w 2 ( k )( 42 ) D " a " a z " ' - I= - - h - - - ( 5 0 )
O(k + 1) = O(k) + w o(k) (43)
"h T T bT ITwh ere x~ = [ i , r / i , h iJ , W~ =[Wm,wbT]T( i = 1 , 2 ) a n d w i t h t h e o b v i o u s d e f i n i t io n o f f . ^ [ 0 .0 35 8 0 0 ]I f p o s i t io n ( x , y ) a n d h e a d i n g ( ¢ ) a r e m e a s u r e d , D " = 0 0 .1183 -0 .01 24 . (51)
0 -0 .00 41 0 .0308
4.4 . Experimental Results
S i x m a n e u v e r s w i t h t h e s u p p l y v e s s e l w e r e u s e d t oe s t im a t e t h e D P m o d e l• T h e u n k n o w n p a r a m e t e r
= 0 tt] T i s o rg a n i z e d a c c o r d i n gec to r 0" [0~', .. ., 9J
to :
T h e p a r a m e t e r e s t i m a t e s f o r t h e o ff - li n e p a r a l l elc o n f i g u r at i o n o f t h e E K F a l g o r i t h m a r e s h o w n i nF i g u r e 8 , w h i l e t h e s t e a d y - s t a t e n u m e r i c a l v a l u e sa r e g i v e n b e l o w.
Identified Momentum Equation.
I£ " = lO -3d ia g{9 .3 , 9 .3 , 2 .0 , 2 .0 , 2 .8 , 2 .6} . ( 49 )
F r o m ( 3 9 ) i t is s ee n t h a t :
S u b s t i t u t i n g ( 3 0 ) a n d ( 4 8 ) i n to ( 5 0 ) , y i e l d s:

8/8/2019 LF Ship Dynamics
http://slidepdf.com/reader/full/lf-ship-dynamics 8/8
376 T.I. Fossenet al.
Ident i f ied Sta te-Space Model . T h e e s t i m a t e dmod e l (35 ) can be r e la t ed to the D P con t ro l mod e lb y a s s u m i n g t h a tC h ( h ) = O . Hence :
/ / ' = A " u 't + B r " ( 5 2)
w h e r e A " " 1 ̂ u u B u M " - I .M - A h M a n d = T h e
numerical values are :
^, , [ -0.031 8 0 0 ]A --- 0 -0.06 28 -0.003 0 (53)
0 -0 .0045 -0 .2428
A,, [B =
0 . 0 0 8 2 0 . 0 0 8 2 00 .0001 -0 .0001 0 .00080.0035 -0 .0035 -0 .0059
0 0 00 .0008 0 .002 0 0 .0017
-0 .0055 0 .011 3 0 .0079.(54)
The non-d imens iona l e igenva lues o f A " a re :
(Yaw) ~ = -0 .2 42 9(Sway) AN = - 0 . 0 6 2 7(Surge ) ~ = -0 .0 31 8 .
( 5 5 )
The d imens iona l t ime cons tan t s a re g iven by( Ti = - ( 1 / ) ~ ' ) v/-L/g) :
(Ya w) T~' -- 11.5 (s)( S w a y ) = 4 4 . 5 ( s )(Surg e) T~' = 87.8 (s).
( 5 6 )
F o r m o r e d e t a il s a b o u t t h e D P c o n t r o l s y s t e m d e -s ign, see (S0rensenet al., 1995).
5 . C O N C L U S I O N S
In th i s pape r a new approach fo r t he iden t i f i -ca t ion o f dynam ica l ly pos i t ioned sh ips has beenproposed . Three d i f f eren t sh ip maneu ver s wereused in a decoup led iden t i f i ca tion scheme ba sed onan o ff- li ne pa ra l le l conf igu ra t ion o f the e x tende dKalm an f i lt e r a lgo r i thm. S imula t ion s tud ie ss h o w e d t h a t t h e p r o p o s e d p a r a m e t e r - e s t i m a t i o nscheme was r emarkab ly accura t e fo r sh ip mode l stha t were coup led in su rge , sway and yaw. Thep a r a m e t e r - e s t im a t i o n a l g o r it h m h a s b e en i m p le -men ted and t e s t ed on a supp ly vesse l . The e s -t ima te d mo de l o f t he sup p ly vessel has been im-p lemen ted , and used fo r mode l -based DP con t ro lsys t em des ign . The e s t ima ted va lues o f t h i s sh ipshowed good ag reem en t wi th expe r im en ta l r e su l t sf rom mode l t e s t s .
6 . R E F E R E N C E S
Abkowi tz , M. A . (1975) . Sys t em Iden t i f i ca t ionTechn iques fo r Sh ip Maneuver ing Tr i a l s . In :Proceeding of Sym po sium on Control Theory
and Na vy App l i ca t ions.Monte rey, CA. pp . 337-393.
Abkow i tz , M. A . (1980). Measu remen t o f Hyd ro -dynamic Charac te r i s t i c s f rom Sh ip Maneuvr ingTria ls by System Ident i f ica t ion. In :Transac-t i ons on SN AM E, 88 :283-318 .
Balchen, J . G. , N. A. Jenssen and S. Stol id (1976) .
Dynamic Pos i t ion ing Us ing Ka lman F i l t e r ingand Opt ima l Con t ro l Theory. In :I FA C / / I F I PSym pos iu m on Au to ma t ion in Offsho re O i lFie ld Opera t ion .H o l l an d , A m s t e r d a m . p p . 1 8 3 -186.
Balchen, J . G. , N. A. Jenssen and S. S~el id(1980a) . Dynam ic Pos i t ion ing o f F loa t ing Ves -se l s Based on Ka lman F i l t e r ing and Opt i -mal Con trol . In : Proceedings of the 19thIE EE Conference on Decis ion a nd Control.New York , NY. pp . 852-864 .
Ba lchen , J . G . , N . A . Jenssen , E . Math i sen and
S . S~e l id (1980b). D ynam ic P os i t ion ing Sys -t e m B a s e d o n K a l m a n F i l t e r i n g a n d O p t i m a lCon t ro l . Model ing, Ident i f ica t ion and ControlM I C - I ( 3 ) , 1 3 5 - 1 6 3 .
Fal t insen, O. M. (1990) .Sea Loads on Sh ipsand Offshore St ructures .C a m b r i d g e U n i v e r s it yPress .
Fossen, T. I . (1994) . Guidance and Con t ro l o fOcean Vehicles. J o h n Wi l e y a n d S o n s L t d .
Fung , P. T-K. and M. J . Gr imble (1983) . DynamicSh ip Pos i t ion ing Us ing a Se l f Tun ing Ka lm anFi l ter. I E E E Tr a n sa c t io n s o n A u t o m a t i c C o n -trol A C - 2 8 ( 3 ) , 3 3 9 - 3 4 9 .
Gelb , A. , J . F. Kasper, J r. , R. A. Nash, J r. , C. F.P r i ce and A . A . Su the r l and , J r. (1988) .Appl iedOpt ima l Es t ima t ion .M I T P r e s s . B o s t o n , M a s -sachuset ts .
Gr imble , M. J . , R . J . Pa t ton and D . A . Wise(1980a) . The D es ign o f Dy nam ic Pos i t ion -ing Con t ro l Sys tems Us ing S tochas t i c Op t ima lCon t ro l Theory. Opt ima l Con t ro l App l i ca t ionsand Methods 1 , 1 6 7 - 2 0 2 .
Gr imble , M. J . , R . J . Pa t ton and D . A . Wise(1980b) . Use o f Ka lm an F i l t e r ing Techn iquesin Dynamic Sh ip Pos i t ion ing Sys tems . In :I E E
Proceedings Vo l. 127, Pt . D, No. 3.pp . 93 -102 .Hwan g , Wei -Yuan (1980) . App l i ca t ion o f Sys tem
Iden t i f i ca t ion to Sh ip Maneuver ing . Mas te r ' sthes is . M assachuse t t s In s t i t u t e o f Techno logy.
Stol id , S . , N. A. Jenssen and J . G. Balchen (1983) .Des ign and Ana lys i s o f a Dyna mic Pos i t ion ingS y s t e m B a s e d o n K a l m a n F i l t e r i n g a n d O p t i -ma l Con t ro l . I E E E Tr a n sa c t io n o n A u t o m a t i cCon t ro l A C - 2 8 ( 3 ) , 3 3 1 - 3 3 9 .
S0rensen, A. , S . I . Sagatun and T. I . Fossen(1995). The Des ign o f a Dy nam ic Pos i t ion ingS y s t e m U s i n g M o d e l B a s e d C o n t r o l.Control Engineer ing Pract ice( th is Issue) .







