
Classificação de singularidades simpléticas:
o método das restrições algébricas
Lito Edinson Bocanegra Rodríguez


Classificação de singularidades simpléticas: o método das restrições algébricas
Lito Edinson Bocanegra Rodríguez
Orientadora: Profa. Dra. Roberta Godoi Wik Atique
Dissertação apresentada ao Instituto de Ciências Matemáticas e de Computação - ICMC-USP, como parte dos requisitos para obtenção do título de Mestre em Ciências - Matemática . VERSÃO REVISADA
USP – São Carlos
Maio de 2014
SERVIÇO DE PÓS-GRADUAÇÃO DO ICMC-USP
Data de Depósito: 09/05/2014 Assinatura:________________________

Ficha catalográfica elaborada pela Biblioteca Prof. Achille Bassi e Seção Técnica de Informática, ICMC/USP,
com os dados fornecidos pelo(a) autor(a)
B664cBocanegra Rodríguez, Lito Edinson Classificação de singularidades simpléticas: ométodo das restrições algébricas / Lito EdinsonBocanegra Rodríguez; orientadora Roberta Godoi WikAtique. -- São Carlos, 2014. 84 p.
Dissertação (Mestrado - Programa de Pós-Graduaçãoem Matemática) -- Instituto de Ciências Matemáticase de Computação, Universidade de São Paulo, 2014.
1. Restrições algébricas. 2. Classificação decurvas numa variedade simplética. 3. Ponômios quase-homogêneos. I. Wik Atique, Roberta Godoi, orient.II. Título.

A minha família, que sempre me apoiou, especial-mente minha mãe Bernardina Rodríguez e meu paiTomás Bocanegra.


Agradecimentos
Primeiramente quero agradeçer em especial a minha orientadora Profa. Dra. Roberta
Godoi Wik Atique, pela sua dedicação, paciência, ajuda, amizade, apoio em todo o tempo
que ela me orientou.
Aos meus queridos pais, Bernardina Rodríguez e Tomás Bocanegra que sempre me
apoiaram, me deram seu compreensão e amor e pelo sacrifício que �zeram para continuar
com meus estudos e chegar até onde estou. Às minhas irmãs Vanesa e kelbi assim como
a minha tia Guadalupe Bocanegra pela amizade e pelo apoio de forma incondicional
durante toda minha vida. A Edith Cuenca, pelo amor e comprensão incondicional que
sempre foram necesários para continuar.
Aos professores do departamento de Matemática do ICMC que contribuiram com a
minha formação: Eduardo Tengan, Carlos Grossi, Nivaldo de Góes, Carlos Maquera,
Ederson Moreira, Daniel Levcovitz, Paulo Dattori, Leandro Aurichi, Sérgio Monari e
Farid Tari pelos ensinamentos, apoio e motivação.
Aos funcionários da Biblioteca do ICMC, das seções de pós-graduação, da área �nan-
ceira e da diretoria.
Aos meus amigos Patricia Hilario, Norbil Cordova, Elizabeth Salazar, Edith Anco,
Ginnara Mexia, Patricia Tempesta, Apoeña Passos, Thales Maier, Leandro Nery, Camila
Ruiz, ... todos eles tem minha gratidão por todo o apoio.
À CAPES pelo apoio �nanceiro sim o qual não teria sido possível este trabalho.
Peço desculpas às pessoas que não citei e que me ajudaram direta ou indireitamente
no mestrado, agradeço muito.
i

ii

Resumo
Neste trabalho obtemos a classi�cação simplética de singularidades de curvas do tipo
A, D, E, através do método das restriçães algébricas.
Em outras palavras, considerando pR2n, ωq um germe de variedade simplética, N �
tHpx1, x2q � x¥3 � 0u uma curva algébrica singular onde Hpx1, x2q é uma função que
representa uma das clássicas singularidades Ak, Dk, E6, E7, E8, queremos classi�car com
respeito ao grupo dos simplectomor�smos as classes das variedades algébricas em pR2n, ωq
que são difeomorfas a N , através do método das restrições algébricas.
iii

iv

Abstract
In this work, we obtain the classi�cation of symplectic singularities of curves of the
type A, D, E, through the algebraic restriction method.
In other words, considering pR2n, ωq a germ of symplectic manifold, N � tHpx1, x2q �
x¥3 � 0u � pR2n, ωq an algebraic singular curve where Hpx1, x2q is a function that repre-
sents one of the classical singularities Ak, Dk, E6, E7, E8,, we want to classify with respect
to the group of symplectomorphisms the classes of varieties in pR2n, ωq that are di�eo-
morphic to N , through the algebraic restrictions method.
v

vi

Sumário
Notação ix
Introdução 1
1 Preliminares 3
1.1 Variedades Simpléticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.1.1 Campos vetoriais . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.2 Formas diferenciáveis . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.3 Derivada de Lie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.4 Variedades Simpléticas . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.2 Teoria de Singularidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.1 Germes e Jatos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2.2 Ação de Grupo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.2.3 A álgebra εn . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.2.4 Germes Simples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.5 C,K-equivalência . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3 Variedades Algébricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4 Problema A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2 O método das restrições algébricas 19
2.1 De�nição de restrição algébrica . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 A ação do grupo das simetrias locais . . . . . . . . . . . . . . . . . . . . . 22
2.3 Teorema de Redução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4 Grupos de Cohomologia Relativa . . . . . . . . . . . . . . . . . . . . . . . 26
2.5 Teoremas A e B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
vii

3 Invariantes Simpléticos 34
3.1 Teorema C e D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.2 O espaço rΛ2,closedpR2nqsN e o conjunto rSymppR2nqsN . . . . . . . . . . . . 37
4 O método das restrições algébricas para curvas 41
4.1 As simetrias in�nitesimais da curva tH � 0u . . . . . . . . . . . . . . . . . 42
4.2 Restrições algébricas de curvas quase-homogêneas . . . . . . . . . . . . . . 47
4.3 Ferramentas para a Classi�cação . . . . . . . . . . . . . . . . . . . . . . . . 50
5 Classi�cação simplética de curvas planas quase-homogêneas singulares 53
5.1 O espaço das restrições algébricas . . . . . . . . . . . . . . . . . . . . . . . 54
5.2 O índice de isotropia e a multiplicidade simplética . . . . . . . . . . . . . . 55
5.3 Classi�cação simplética A-D-E . . . . . . . . . . . . . . . . . . . . . . . . . 58
5.3.1 Demonstração do Teorema 5.9(1) . . . . . . . . . . . . . . . . . . . 59
5.3.2 Demonstração do Teorema 5.9(2) . . . . . . . . . . . . . . . . . . . 67
5.3.3 Demonstração do Teorema 5.9(3) . . . . . . . . . . . . . . . . . . . 76
5.3.4 Demonstração do Teorema 5.9(4) . . . . . . . . . . . . . . . . . . . 77
Referências Bibliográ�cas 83
viii

Notação
Z conjunto dos números inteiros.N conjunto dos números inteiros positivos.N0 conjunto dos números inteiros não negativos.R conjunto dos números reais.dimM dimensão da variedade M.dimRQ dimensão do R-espaço vetorial Q.Rta1, . . . , aku o R-espaço vetorial gerado por a1, . . . , ak.d derivada exterior.^ produto exterior de formas diferenciáveis.� pullback.LV derivada de Lie, onde V é campo de vetores.iV produto interior, onde V é campo de vetores.iM função inclusão, onde M � Rm,m P N.pM, 0q germe do conjunto ou subvariedade M onde 0 PM � Rm,m P N.pR2n, ωq germe de variedade simplética na origem.SymppR2nq o conjunto das formas simpléticas em R2n.εn o R-espaço vetorial dos germes na origem de funções em Rn .Mn o ideal máximal de εn.µpfq número de Milnor de f.ΛppMq o espaço de todos os germes na origem, das p-formas diferenciá-
veis em M .Λ0pRmq o R-espaço vetorial dos germes na origem de funções em Rm.ΛpNpMq � tω P ΛppMq : ωpxq � 0, @x P Nu .
A p0 pN,Mq �
α � dβ : α P Λp
NpMq, β P Λp�1N pMq
(.
rΛppMqsN o R-espaço vetorial das restriçoes algébricas a N de todas as p-formas em M .
rωsN restrição algébrica da k-forma ao conjunto N .xf1, . . . , fky o ideal gerado por f1, . . . , fk P Λ0pRmq.x∇fy ideal gerado pelas derivadas parciais de f P Λ0pRmq.xrθsNy o Λ0pMq-submódulo do Λ0pMq-módulo rΛppMqsN�Λ2,closedpR2nq
�N
o subespaço de rΛ2pR2nqsN composto das restrições algébricas aN de todas as 2-formas fechadas emR2n.
rSymppR2nqsN o conjunto aberto em�Λ2,closedpR2nq
�Ncomposto das restriões
algébricas a N das 2-formas simpléticas em R2n.
ix

TM �brado tangente da variedade M.jkfp0q k-jato na origem de f P Λ0pRmq.ω|TM restrição da k-forma diferenciável à subvariedade M .Dn grupo do germe de difeomor�smos de pRn, 0q.DpMq grupo do germe de difeomor�smos do germe de subvariedade pM, 0q.T paq o espaço tangente a a P rΛ2pR2nqsN .E,H campo vectorial de Euler e Hamiltoniano respectivamente.DerlogtNu conjunto das simetrias in�nitesimais da curva N � pR2, 0q.apdq parte quase homogênea de grau d de a P rΛ2pR2qstH�0u.�pδq o subespaço de rΛ2pR2qstH�0u das restrições algébricas sem ter-
mos quase-homogêneos de grau menor ou igual que δ.a � b a difeomorfo a b, a, b P rΛ2pR2qstH�0u.
x

Introdução
As estruturas simpléticas surgem naturalmente em diversos contextos tais como: mecâ-
nica Hamiltoniana, teoria de campos, óptica geométrica, geometria algébrica, etc. Nestes
casos, as bifurcações dos vários objetos simpléticos, como variedades Lagrangianas ou
isotrópicas, representando as fases dos sistemas, desempenham um papel importante.
O problema da classi�cação simplética de curvas singulares foi introduzido por V.I.
Arnold em [A]. Arnold mostrou que uma singularidade do tipo A2k de uma curva plana
(com relação ao grupo A) se subdivide em 2k � 1 órbitas com respeito à equivalência
simplética. Ele distinguiu as diferentes singularidades simpléticas através do contato
(ordem de tangência) da curva parametrizada com a subvariedade Lagrangiana suave mais
próxima. Arnold expressou estes novos invariantes simpléticos em termos da interação da
álgebra local com a estrutura simplética, chamada de álgebra local simplética.
Num espaço simplético pR2n, ωq dizemos que dois conjuntosN1, N2 são simplectomorfos
se existe um difeomor�smo que leva N1 em N2 e preserva ω.
Neste trabalho consideramos N uma curva algébrica singular plana quase-homogênea
e queremos identi�car dentre as curvas difeomorfas a N aquelas que são simplectomorfas.
Para isto usaremos o método das restrições algébricas. Este foi desenvolvido por W.
Domitrz, S. Janeczko e M. Zhitomirskii em [D-J-Z], que é a nossa principal referência.
Esta disseratação está dividida em 5 capítulos. No Capítulo 1 introduzimos concei-
tos e resultados preliminares de variedades diferenciáveis, variedades simpléticas, teoria
de singularidades e alguns conceitos de variedades algébricas, também descrevemos de
maneira mas precisa o problema a ser resolvido (Problema A).
No Capítulo 2, de�nimos o R-espaço vetorial das restrições algébricas de germes de
k formas diferenciáveis a um conjunto N e obtemos a ação do grupo de simetrias locais
de N neste espaço vetorial. Como exemplo obtemos uma base do espaço das restrições
1

2
algébricas no caso N � tAk � 0u e as formas normais das órbitas com respeito à ação
do grupo de simetrias locais. Reduzimos nosso Problema A ao problema de classi�car
as restrições algébricas no conjunto rSymppR2nqsN com respeito ao grupo de simetrias
locais de N (Problema B) e revisamos vários teoremas dos quais resaltamos os Teoremas
A e B, neste último temos condições necessárias e su�cientes para quando um conjunto
quase-homogêneo N está contido numa variedade Lagrangiana.
No Capítulo 3, introduzimos o índice de isotropia e a multiplicidade simplética, inva-
riantes simpléticos que foram introduzidos por Arnol'd. Obtemos os Teoremas C e D que
mostram como calcular estes invariantes e alguns resultados relacionando os conjuntos
rΛ2pR2nqsN , rΛ2,closedpR2nqsN e rSymppR2nqsN .
No Capítulo 4, reduzimos nossos resultados para a variedade simplética pR2, ωq, consi-
deramos Hpx1, x2q polinômio quase-homogêneo, de�nimos a álgebra local e multiplicidade
(número de Milnor) de H, as simetrias in�nitesimais da curva N � tH � 0u pDerlogtNuq
e encontramos o espaço tangente T paq à órbita de a P rΛ2pR2qsN . Por último provamos
os dois teoremas que serão fundamentais para a classi�cação em rΛ2pR2qsN com respeito
ao grupo de simetrias locais de N .
No Capítulo 5, como uma curta continuação do Capítulo 3 obtemos mais relações
entre rΛ2,closedpR2nqsN e rSymppR2nqsN . Obtemos a multiplicidade simplética e o índice de
isotropia, a classi�cação de rΛ2pR2qsN com respeito ao grupo de simetrias locais de N e
mediante esta classi�cação resolvemos o Problema A na variedade simplética pR2n, ωq, n P
N.

Capítulo
1Preliminares
Como foi mencionado na Introdução neste capítulo apresentamos de�nições e resulta-
dos que serão a base para entender nosso problema (Problema A) a resolver assim como
para desenvolver nos seguintes capítulos a teoria necessária para a sua resolução.
1.1 Variedades Simpléticas
Começamos supondo que de�nições como variedade suaves, funções suaves, sistema
de coordenadas, derivada e espaço tangente são já conhecidas pelo leitor e podem ser
encontradas por exemplo em [L].
Considere uma variedade suave M , lembre que se p PM então existe uma vizinhança
U de p e uma função φ : U ÝÑ Rn que é difeomor�smo sobre a imagem. O par pU, φq
é chamado de carta ou sistema de coordenadas local do ponto p e pelo geral a função φ
será denotada por px1, . . . , xnq (a função φ�1 é chamada de parametrização de p em M) e
o n que existe não depende do ponto p é chamado de dimensão da variedade, neste caso
denotamos por Mn para fazer ênfase em que n é a dimensão da variedade M .
Sejam M,N variedades suaves, f : M ÝÑ N é suave em x P M se para quaisquer
pU, φq, pV, ψq cartas de x e fpxq respectivamente tais que fpUq � V temos que φ�1 �f �φ :
φ�1pUq ÝÑ ψpV q é suave. No caso em que f é suave em todo ponto de M dizemos que
f é suave.
De�nição 1.1: Seja M uma variedade suave e seja S � M um subconjunto. Dizemos
que S é uma subvariedade mergulhada ou simplesmente subvariedade, se S com a topo-
logia induzida de M admite uma estrutura de variedade suave. No caso de S ser uma
subvariedade denotamos por codimS � dimM � dimS que é chamada de codimensão de
3

4 Capítulo 1. Preliminares
S.
Proposição 1.2: Sejam Mm variedade suave e S � M uma subvariedade de dimensão
s. Então para todo p P S existe uma carta local pU, φq onde φ � px1, x2, . . . , xmq tal que
φpU X Sq é subconjunto de tpx1, . . . , xs, xs�1, . . . , xmq{xi � 0, s� 1 ¤ i ¤ mu.
Dada uma variedade suave M e p P M denotamos o espaço tangente a M em p por
TpM . Lembre que TpM é um R- espaço vetorial de dimensão dimM . Sejam M,N duas
variedades e seja f : M ÝÑ N uma função suave, denotamos a derivada de f em p P M
por dpf : TpM ÝÑ TfppqN .
1.1.1 Campos vetoriais
Esta subseção pode por exemplo ser encontrada em [T]. Assumimos que o leitor já
esta familiarizado com �brados vetoriais.
Lembramos que uma seção de um �brado vetorial π : E ÝÑ M é uma função s :
M ÝÑ E tal que s � π � idM . Dizemos que a seção é suave quando s for uma função
suave. Também lembre que dada uma variedade suave M o �brado tangente de M é
TM �¤pPM
tpu � TpM.
De�nição 1.3: Um campo vetorial ou campo de vetores na variedade suave M é uma
seção do �brado vetorial π : TM ÝÑM , onde πpp, vq � p, @p PM, @v P TpM .
SejamM uma variedade suave com dimM � n e um campo de vetoresX deM . Então
dada pU, px1, . . . , xnqq uma carta local de M em p0, existem ai : U ÝÑ R, i � 1, . . . , n
tais que
Xppq �n
i�1
aippqB
Bxi
����p
, @p P U (1.1)
onde t BBxiu1¤i¤n são os campos vetoriais tais que para todo ponto p o conjunto t B
Bxi
���pu1¤i¤n
é uma base do espaço TpM .
Proposição 1.4: Seja X um campo de vetores na variedade suave M . Então X é suave
se e somente se para toda carta local pU, px1, . . . , xnqq de M se cumple que as funções ai
dadas na equação (1.1) são suaves @i � 1, . . . , n.
De�nição 1.5: Sejam M uma variedade suave, X um campo de vetores e p P M .

Capítulo 1. Preliminares 5
Dizemos que X tem um �uxo local em p se existe uma função suave
Φ : s � ε, ε r � V ÝÑ U, ε ¡ 0
onde Φpt, xq � φtpxq, tal que
1. V � U �M são vizinhanças abertas de p;
2. Φ0 : V ÝÑ U é a função inclusão;
3. Φt1�t2 � φt1 � φt2 , quando ambas expressões estão bem de�nidas;
4.BΦrpqq
Br
����r�t
�dΦrpqq
dr
����r�t
� Xφtpqq, para todo q P V .
Proposição 1.6 ([G]): Seja M uma variedade suave, X um campo de vetores e p PM .
Então existe um �uxo local de X em p.
1.1.2 Formas diferenciáveis
Esta subseção pode ser encontrada em qualquer dos textos citados anteriormente assim
como em [K-M], assumimos que o leitor já está familiarizado com o produto tensorial.
Seja Mn numa variedade suave e p PM . Uma k-forma em p é uma função
ωp : TpM � . . .� TpMloooooooooomoooooooooonk�vezes
ÝÑ R
que é uma transformação k-linear (isto que dizer que é linear em cada componente) e que é
alternada isto é ωpp. . . , vi, . . . , vj, � � � q � �ωpp. . . , vj, . . . , vi, � � � q para vi, vj P TpM, i � j.
O Conjunto de todas as k-formas em p é denotado por ΛkpTpMq. O conjunto
Λk�pTMq �
¤pPM
tpu � ΛkpTpMq
é um �brado vetorial chamado de �brado das k-formas. Uma seção suave de Λk�pTMq é
chamado de k-forma diferenciável em M . O conjunto das k-formas diferenciáveis em M é
um R-espaço vetorial e é denotado por ΛkpMq. As 0-formas diferenciáveis são justamente
as funções suaves em M .
Seja k P N, denotamos por Sk o grupo de permutações de k elementos, para cada
σ P Sk temos associado um valor signpσq que é 1 ou �1. Seja V um espaço vetorial e
T : V � . . . � V ÝÑ R uma transformação k-linear, de�nimos a operação alternação de
T como
AltpT qpv1, . . . , vkq �1
k!
¸σPSk
signpσqT pvσp1q, . . . , vσpkqq.

6 Capítulo 1. Preliminares
Sejam k, l P N de�nimos o produto exterior
^ : ΛkpTpMq � ΛlpTpMq ÝÑ Λk�lpTpMq
por ω ^ α � pk�lq!k!l!
Altpω b αq, onde b denota o produto tensorial.
Seja M uma variedade suave, p P M , considere uma carta pU, px1, . . . , xnqq de M em
p, denotamos por dxi|p ou dxi quando não haver confusão do ponto de M i � 1, . . . , n as
1-formas em p tais que
dxi|p
�B
Bxi
����p
��
"1, i � j0, i � j
Sejam vi �°nj�1 aij
BBxi
���p, i � 1, . . . , k, então
dxi1 ^ . . .^ dxikpv1, . . . , vkq � det
�����
ai11 ai21 � � � aik1
ai12 ai22 � � � aik2...
.... . .
...ai1k ai2k � � � aikk
����
Proposição 1.7: Seja M uma variedade suave, ω P Λk�pTMq, η1, η2 P Λl
�pTMq, γ P
Λm� pTMq então temos
1. ω ^ pη1 � η2q � ω ^ η1 � ω ^ η2;
2. ω ^ η1 � p�1qklη ^ ω;
3. ω ^ pη ^ γq � pω ^ ηq ^ γ.
Proposição 1.8: Sejam M uma variedade suave, p PM e ω uma k-forma diferenciável.
Então dada uma carta pU, px1, . . . , xnqq de M em p existem funções suaves fI � ai1i2...ik :
U ÝÑ R, 1 ¤ i1 . . . ik ¤ n tais que para todo q P U temos
ωq � ωpqq �¸I
fIpqqdxI , onde dxI � dxi1 ^ . . .^ dxin (1.2)
De�nição 1.9: Sejam M,N variedades suaves, f : M ÝÑ N uma função suave, de�ni-
mos o pull-back f� : ΛkpNq ÝÑ ΛkpMq dada por
pf�ωqppv1, . . . , vkq � ωfppqpdpfpv1q, . . . , dpfpvkqq, para v1, . . . , vk P TpM.
Observação 1.10: Note que na De�nição 1.9, se k � 0, então f�pgq � g � f.
Proposição 1.11: Nas condições da de�nição 1.9, sejam g : N ÝÑ P função suave,
ω1, ω2 P ΛkpMq e η P ΛlpMq, então

Capítulo 1. Preliminares 7
1. f�pω1 � ω2q � f�pω1q � f�pω2q;
2. f�pω1 ^ ηq � f�pω1q ^ f�pηq;
3. pg � fq�pω1q � f�g�pω1q.
1.1.3 Derivada de Lie
Esta subseção pode ser encontrada em [L].
De�nição 1.12: Seja V um campo de vetores na variedade M , de�nimos o produto
interior iV : ΛkpMq ÝÑ Λk�1pMq por iV pωqpp, v1, . . . , vk�1q � ωpp, Vp, v1, . . . , vk�1q �
ωppVp, v1, . . . , vk�1q onde Vp � V ppq, v1, . . . , vk�1 P TpM .
De�nição 1.13: SejamMn uma variedade diferenciável e k P N0. Uma derivada exterior
d : ΛkpMq ÝÑ Λk�1pMq é uma função que satistfaz:
1. d é linear sobre R.
2. Se ω P ΛkpMq e α P ΛlpMq, então
dpω ^ αq � dpωq ^ α � p�1qklω ^ dpαq.
3. d � d � 0.
4. Para f P Λ0pMq, df é a diferencial de f dada por dfpXq � Xpfq, onde se X �°ni�1 gi
BBxi
é um campo de vetores então Xpfq �°ni�1 gi
BfBxi
.
Proposição 1.14: Sejam Mn uma variedade diferenciável, então existe uma única de-
rivada exterior e ela é denotada por d.
Proposição 1.15: Dado um sistema de coordenadas pU, px1, . . . xnqq da variedade suave
Mn, se ω �°I aIdxI , então dpωq �
°I dpaIq ^ dxI , onde dpaIq é a diferencial da função
aI .
Proposição 1.16: Seja F : M ÝÑ N uma função suave entre variedades suaves, então
F � : ΛkpNq ÝÑ ΛkpMq comuta com d: para todo ω P ΛkpNq temos F �pdωq � dpF �ωq.
De�nição 1.17: Uma k forma diferenciável ω P ΛkpMq é chamada fechada se dpωq � 0
e é chamada exata se existe α P Λk�1pMq tal que dpαq � ω.

8 Capítulo 1. Preliminares
De�nição 1.18: Seja X um campo de vetores e ω uma k-forma diferenciável na varie-
dade suave M , a derivada de Lie LX : ΛkpMq ÝÑ ΛkpMq, em p PM é de�nida por
pLXωqp � pLXωqppq � limtÑ0
pΦ�t ωqp � ωp
t�
d
dtp�
t ωq
����p
,
onde Φ é um �uxo de X em p.
Observação 1.19: A de�nição 1.18 não depende do �uxo local Φ.
Proposição 1.20: Seja X um campo de vetores na variedade suave M . Então temos
as seguintes propriedades:
1. LXf � Xpfq, f função suave;
2. LXpω ^ βq � pLXωq ^ β � ω ^ pLXβq, @ω P ΛkpMq, β P ΛlpMq;
3. LXdω � dLXω, @ω P ΛkpMq;
4. pFórmula de Cartanq LXω � diXω � iXdω, @ω P ΛkpMq.
Proposição 1.21 (ver [S]): Sejam M uma variedade suave, I � R um intervalo aberto
que contém o zero. Seja tωt, t P Iu uma família de k-formas, tXt, t P Iu uma família de
campos vetoriais e tρt, t P Iu uma família de difeomor�smos de M tais que são suaves
com respeito a t eBρrBr
����r�t
� Xt � ρt. Então
d
dtρ�t ωt � ρ�t
�LXtωt �
dωtdt
. (1.3)
1.1.4 Variedades Simpléticas
A seguinte subseção pode ser encontrada em [S].
De�nição 1.22: Sejam M uma variedade suave e ω uma 2-forma diferenciável em M .
Então pM,ωq é chamado de variedade simplética ou espaço simplético se ω satisfaz:
1. ω é uma forma fechada;
2. Para cada p P M , ωp é anti-simetrica, isto é, ωppv, wq � �ωppw, vq, para todo
v, w P TpM ;
3. Para cada p PM , se v P TpM é tal que ωppv, wq � 0, @w P TpM , então v � 0.
Capítulo 1. Preliminares 9
Proposição 1.23: Se pM,ωq é uma variedade simplética, então dimM � 2n, para
algum n P N.
Exemplo 1.24: Sejam M � R2n com coordenadas x1, . . . , xn, y1, . . . ..., yn e a 2-forma
diferenciável ω0 �°ni�1 dxi ^ dyi. Então pM,ω0q é uma variedade simplética.
De�nição 1.25: Sejam pM1, ω1q, pM2, ω2q duas variedades simpléticas 2n-dimensionais e
φ : M1 ÝÑM2 um difeomor�smo. Então φ é chamado simplectomor�smo se φ�pω2q � ω1.
Teorema 1.26 (Clássico de Darboux): Seja pM,ωq uma variedade simplética 2n-dimensional,
e seja p P M . Então existe um sistema de coordenadas pU, px1, . . . , xn, y1, . . . , ynqq de M
em p tal que em U temos
ω �n
i�1
dxi ^ dyi.
A carta pU, px1, . . . , xn, y1, . . . , ynqq no Teorema 1.26 é chamada de Carta de Darboux.
De�nição 1.27: Seja pM,ωq uma variedade simplética 2n-dimensional, uma subvarie-
dade N �M é chamada isotrópica com respeito a ω se iN : N ÝÑM , a função inclusão,
satisfaz iN�pωq � 0, isto quer dizer que a forma ω se anula em N .
Proposição 1.28: Nas condições da De�nição 1.27 temos que se a subvariedade N �M
é isotrópica com respeito a ω então dimN ¤ n.
De�nição 1.29: Uma subvariedade isotrópica N tal que dimN � dimM2
é chamada de
subvariedade Lagrangiana.
1.2 Teoria de Singularidades
Esta seção pode ser encontrada por exemplo em [G].
1.2.1 Germes e Jatos
De�nição 1.30: Seja M um subconjunto de um espaço topológico e p P M . Dizemos
que dois subconjuntos A,B �M são equivalentes em p P AXB se existe uma vizinhança
aberta W de p tal que W X A � W XB.
Observe que a relação anterior é de equivalência no conjunto das partes de M . As
classes de equivalência são chamadas de germes de conjuntos. No caso de M ser uma

10 Capítulo 1. Preliminares
variedade diferenciável as classes de equivalência são chamadas de germes de variedades
e são denotadas por pM, pq.
Sejam M,N duas variedades suaves. Consideremos o conjunto das funções suaves
de�nidas em uma vizinhança de x PM com valores em N .
tpU, gq { U é vizinhaça aberta de x em M e g : U ÝÑ N suaveu .
Neste conjunto introduzimos a seguinte relação de equivalência: f : U ÝÑ N e g :
V ÝÑ N , onde U, V são vizinhanças de x emM , são equivalentes se existe uma vizinhança
aberta W de x em M tal que W � U X V e f |W � g|W .
As classes de equivalência são chamadas germes em x de funções suaves de M em N
e denotadas por f : pM,xq ÝÑ pN, yq. O x é chamado de fonte e y chamado de meta.
Seja f : pM,xq ÝÑ pN, yq um germe de uma função suave. De�nimos o posto de f
como o posto de dfx onde f é um representante do germe.
De�nição 1.31: Sejam M,N e P variedades suaves, f : pM,xq ÝÑ pN, yq e g :
pN, yq ÝÑ pP, zq germes de funções suaves com representantes f : U ÝÑ N e g : V ÝÑ P
respectivamente tais que fpUq � V . De�nimos g � f : pM,xq ÝÑ pP, zq como a classe de
equivalência de g � f : U ÝÑ P .
De�nição 1.32: Sejam M,N variedades suaves, dizemos que um germe f : pM,xq ÝÑ
pN, yq é invertível se existir g : pN, yq ÝÑ pM,xq tal que f � g é o germe da identidade
em pN, yq e g � f é o germe da identidade em pM,xq. Neste caso dizemos que o germe f
é um germe de difeomor�smo.
Segue do Teorema da função inversa para variedades suaves o seguinte resultado.
Teorema 1.33: SejaM,N variedades suaves, x PM e y P N . Um germe f : pM,xq ÝÑ
pN, yq é invertível se e somente dfx : TxM ÝÑ TyN é isomor�smo.
Denotamos por Jkpn, pq o espaço vetorial das funções suaves f : Rn ÝÑ Rp, f �
pf1, . . . , fpq, onde cada componente fi, i � 1, . . . , p, é um polinômio de grau menor ou
igual que k nas coordenadas x1, x2, . . . , xn de Rn, com termo constante nulo. Os elementos
de Jkpn, pq são chamados de k-jatos. Notemos que Jkpn, pq é uma variedade.
De�nição 1.34: Seja f : Rn ÝÑ Rp uma função suave e a P Rn. De�nimos a aplicação
jkfpaq : Rn ÝÑ Jkpn, pq, onde jkfpaq é o polinômio de Taylor de fpx�aq�fpaq de ordem

Capítulo 1. Preliminares 11
k na origem. A aplicação jkf é suave e jkfpaq é chamado de k-jato de f em a,
jkfpaq � dfapxq �1
2d2fapx, xq � . . .�
1
k!dkfapx, . . . , xq.
Observação 1.35: Seja a P Rn e uma função suave f : Rn ÝÑ Rp. Denotamos j0fpaq �
fpaq e chamamos este de 0-jato de f em a.
1.2.2 Ação de Grupo
Sejam G um grupo e M um conjunto. Uma ação de G em M é uma função φ :
G�M ÝÑM , denotada por g � x � φpg, xq, satisfazendo:
1. 1 � x � x, @x PM e onde 1 denota o elemento identidade de G.
2. pg � hq � x � g � ph � xq, @g, h P G, @x PM .
De�nição 1.36: Dada uma ação podemos de�nir uma relação de equivalência em M :
se x, y PM , x é equivalênte a y se existe g P G tal que y � g �x. As classes de equivalência
são chamadas órbitas.
Se x PM , a órbita de x é denotada por
G � x � tg � x{g P Gu.
Exemplo 1.37: Seja GLpnq o grupo das transformações lineares invertíveis em Rn
(matrizes invertíveis) com a operação de composição e M � Jkpn, pq. Uma ação φ :
GLpnq � GLppq � M ÝÑ M do grupo GLpnq � GLppq em M é de�nida da seguinte
maneira:
φppH,Kq, fq � K � f �H�1.
De�nição 1.38: Um grupo de Lie G é um grupo que é uma variedade suave e as funções
de multiplicação G�G ÝÑ G de�nida por pg, hq ÞÝÑ gh e inversão G ÝÑ G de�nida por
g ÞÝÑ g�1 são suaves.
Proposição 1.39: Seja φ : G�M ÝÑM uma ação do grupo de Lie G numa variedade
suave M . Suponhamos que as órbitas sejam subvariedades. Seja x PM , então φx : G ÝÑ
G � x dada por φxpgq � g � x é uma submersão.
Corolário 1.40: Nas hipóteses da Proposição 1.39 temos que TxG � x � dφx1pT1Gq.
Lema 1.41 (de Mather): Seja G um grupo de Lie agindo numa variedade suave M
e N � M uma subvariedade conexa. Suponhamos que as órbitas sejam subvariedades.
Então N está contida numa unica órbita se e somente se,

12 Capítulo 1. Preliminares
1. TyN � TyG � y, @y P N .
2. dimTyG � y � constante, @y P N .
Exemplo 1.42: SejaM � Hdpn, pq o subespaço vetorial de Jdpn, pq constituído das fun-
ções cujas componentes são polinômios homogêneos de grau d nas coordenadas x1, . . . , xn
de Rn, seja G � GLpnq �GLppq e seja φ a ação dada no Exemplo 1.37. Então temos
TfG � f � RtBf
Bxixjui,j�1,...,n � Rtp0, . . . , fj, 0, . . . , 0qloooooooooomoooooooooon
fj no i�ésimo lugar
uj�1,...,pi�1,...,n.
1.2.3 A álgebra εn
Sejam M uma variedade e x PM . Estamos interessados em germes de funções suaves
f : pM,xq ÝÑ pR, yq. Mediante uma parametrização de M em x podemos supor M � Rn
e x � 0. De�nimos
εn � tf : pRn, 0q ÝÑ pR, yq{f é germe de função suaveu.
Temos que εn é um anel local cujo ideal maximal é
Mn � tf P εn{fp0q � 0u.
De�nição 1.43: Seja k P N, denotamos por Jk o ideal de εn que consiste das funções
que tem pk � 1q-jato zero na origem, isto é
Jk � tf P εn{jk�1fp0q � 0u.
Lema 1.44 (de Hadamard): Sejam U � Rn vizinhança convexa de 0, f : U �Rq ÝÑ Rfunção suave tal que fp0, yq � 0, @y P Rq, então existem funções f1, . . . , fn : U�Rq ÝÑ Rtais que f � x1f1 � . . .� xnfn onde x1, . . . , xn são as funções coordenadas de Rn.
Observação 1.45: No caso em que q � 0, com o Lema de Hadamard se demonstra que
Mn � xx1, . . . , xny e Jk � M kn .
Lema 1.46 (de Nakayama): Seja R anel comutativo com unidade 1. Seja m � R ideal
tal que 1� x é invertível @x P m. Seja M um R-módulo e A,B �M R-submódulos com
A �nitamente gerado. Se A � B �mA então A � B.
Seja f P εn, denote ao ideal gerado pelas derivadas parciais de f por
x∇fy � xBf
Bx1
, . . . ,Bf
Bxny.

Capítulo 1. Preliminares 13
Temos que εn é um εn-módulo e x∇fy é um εn-submódulo portanto o quociente εnx∇fy é
um R-espaço vetorial. De�nimos o número de Milnor de f por
µpfq � dimRεn
x∇fy.
Proposição 1.47: Seja f P εn tal que µ � µpfq 8 então M µn � x∇fy.
Demonstração: Considere a sequência de submódulos
εn � εn � x∇fy � Mn � x∇fy � M 2n � x∇fy � . . . � M µ
n � x∇fy � . . . � x∇fy (1.4)
que induz as desigualdades
0 � dimRεnεn
¤ dimRεn
x∇fy �Mn
¤ dimRεn
x∇fy �M 2n
¤
¤ . . . ¤ dimRεn
x∇fy �M µn¤ . . . ¤ dimR
εnx∇fy
� µ 8
Note que cada inclusão estrita na sequência 1.4 contribui com no mínimo 1 para o cálculo
da dimensão, portanto existe i P N, i ¤ µ tal que M in�x∇fy � M i�1
n �x∇fy que implica
M in � MnM i
n � x∇fy assim pelo Lema de Nakayama M in � x∇fy consequentemente
M µn � M i
n � x∇fy.
Dada f P εn temos sua série de Taylor em torno de zero
f � fp0q �n
i�1
Bf
Bxip0qxi �
1
2
n
i,j�1
B2f
BxiBxip0qxixj � � � �
Assim de�nimos o homomor�smo de R-álgebras φ : εn ÝÑ Rrrx1, . . . , xnss dada por
φpfq � f . Se f P εn denotamos por ˆx∇fy � φpx∇fyq e a dimensão dimRRrrx1, . . . , xnss
ˆx∇fyé chamada de codimensão de ˆx∇fy, denotada por codp ˆx∇fyq.
Proposição 1.48: Seja f P εn, então µpfq 8 se e somente se codp ˆx∇fyq 8. Além
disso, se µpfq 8 temos µpfq � codp ˆx∇fyq.
Um germe f : pRn, 0q ÝÑ pRp, 0q induz um homomor�smo de R-álgebras f� : εp ÝÑ
εp de�nida por f�pgq � g � f e é chamado de homomor�smo induzido por f . Sejam
f : pRn, 0q ÝÑ pRp, 0q e g : pRp, 0q ÝÑ pRk, 0q germes de funções suaves, então pg � fq� �
f� � g�.
Proposição 1.49: Seja f : pRn, 0q ÝÑ pRn, 0q. Então f� é isomor�smo se e somente
se f é germe de difeomor�smo. Além disso f�1� � f��1.

14 Capítulo 1. Preliminares
1.2.4 Germes Simples
Seja Dn � th : pRn, 0q ÝÑ pRn, 0q{h é um germe de difeomor�smou. O conjunto Dn é
um grupo com a operação de composição e age em εn da seguinte maneira: φ : Dn�εn ÝÑ
εn é dada por φph, fq � f � h�1. Denotamos o grupo Dn com tal ação por R.
De�nição 1.50: Sejam f, g P εn. Dizemos que f é R-equivalente a g se existe h P Dn
tal que g � f � h�1.
De�nimos Dkn � tjkhp0q{h P Dnu � Jkpn, nq. Dk
n é um grupo de Lie com a operação:
jkfp0q � jkgp0q � jkpf � gqp0q
e age em Jkpn, pq com a ação φ : Dkn � Jkpn, pq ÝÑ Jkpn, pq dada por φph, fq � jkpf �
h�1qp0q. Denotamos o grupo Dkn com tal ação por Rk.
Proposição 1.51: Sejam f, g P εn tais que f e g são R-equivalentes, então x∇fy e x∇gysão isomorfos. Segue que se µpfq 8 então µpfq � µpgq.
A Proposição 1.51 diz que o número de Milnor é um invariante das órbitas da R-equivalência.
De�nição 1.52: Dizemos que f P εn é k-determinado se todo g P εn tal que jkfp0q �
jkgp0q éR-equivalente a f . Dizemos que f é �nitamente determinado se f é k-determinado
para algum k P N.
Proposição 1.53: Se f P εn é tal que M kn � Mnx∇fy para algum k, então f é k-
determinado.
Segue das Proposições 1.53 e 1.47 o seguinte corolario.
Corolário 1.54: Se f P εn é tal que µ � µpfq 8 então f é pµ� 1q-determinado.
De�nição 1.55: Seja G um grupo de Lie agindo numa variedade M . Dizemos que uma
órbita G � x é simples se existe uma vizinhança su�cientemente pequena de g0 � x, para
algum g0 P G, que encontra somente um número �nito de órbitas.
De�nição 1.56: Um germe é dito simples se é k-determinado para algum k P N e seu k-
jato como elemento de JNpn, 1q, N ¥ k, é simples, isto é tem uma vizinhaça que encontra
somente um número �nito de RN -órbitas.

Capítulo 1. Preliminares 15
Teorema 1.57 (Arnold): Um germe simples f P M 2n é R-equivalente a um dos seguintes
germes.
1. Ak : �xk�11 � x2
2 � . . .� x2n, k ¥ 1;
2. Dk : x1x22 � xk�1
2 � x23 � . . .� x2
n, k ¥ 4;
3. E6 : x31 � x4
2 � x23 � . . .� x2
n;
4. E7 : x31 � x1x
32 � x2
3 � . . .� x2n;
5. E8 : x31 � x5
2 � x23 � . . .� x2
n.
1.2.5 C,K-equivalência
De�nimos εn,p como o conjunto dos germes f : pRn, 0q ÝÑ pRp, yq e Mnεn,p como o
conjunto de germes f : pRn, 0q ÝÑ pRp, 0q.
Temos que εn,p é um εn-módulo e Mnεn,p é um εn-submódulo de εn,p.
De�nição 1.58: Dizemos que f, g P Mnεn,p são C-equivalentes se existe um germe
de difeomor�smo H : pRn � Rp, 0q ÝÑ pRn � Rp, 0q e um germe de função suave θ :
pRn � Rp, 0q ÝÑ pRp, 0q tais que Hpx, yq � px, θpx, yqq, θpx, 0q � 0, @x P pRn, 0q e
Hpx, fpxqq � px, gpxqq.
De�nição 1.59: Dizemos que f, g P εn,p são K-equivalentes se existem germes de
difeomor�smos H : pRn � Rp, 0q ÝÑ pRn � Rp, 0q e h : pRn, 0q ÝÑ pRn, 0q e um
germe de função suave θ : pRn � Rp, 0q ÝÑ pRp, 0q tais que Hpx, yq � phpxq, θpx, yqq,
θpx, 0q � 0, @x P pRn, 0q e Hpx, fpxqq � phpxq, gphpxqqq.
De�nição 1.60: Seja f P εn,p, de�nimos Ipfq como o ideal gerado pelas funções com-
ponentes de f , isto é, se f � pf1, . . . , fnq então Ipfq � xf1, . . . , fpy � εn.
Teorema 1.61: Sejam f, g P Mnεn,p, então são equivalentes:
1. f, g são C-equivalentes.
2. Ipfq � Ipgq.
3. Existe uma matriz invertível U � pµijq1¤i,j¤p, µi,j P εn, tal que f � Ug.

16 Capítulo 1. Preliminares
Proposição 1.62: Sejam f, g P Mnεn,p, então f e g são K-equivalentes se e somente
se existe um germe de difeomor�smo h : pRn, 0q ÝÑ pRn, 0q tal que f � h e g são C-equivalentes. Logo f e g são K-equivalentes se e somente se existe um germe de difeo-
mor�smo h : pRn, 0q ÝÑ pRn, 0q tal que h�pIpfqq � Ipgq.
Segue do Teorema 1.61 e da Proposição 1.62 o seguinte Corolario.
Corolário 1.63: Sejam f, g P Mnεn,p, uma condição su�ciente e necessaria para que f
e g sejam K-equivalentes é que exista uma matriz M � pµijq1¤i,j¤p, µij P εn @1 ¤ i, j ¤ p
e um germe de difeomor�smo h : pRn, 0q ÝÑ pRn, 0q tais que g �M.fphq.
1.3 Variedades Algébricas
De�nição 1.64: Um subconjunto N � Rm é chamado de variedade algébrica, se este é
o conjunto de soluções de um sistema de equações polinomiais sobre R.
Exemplo 1.65: Os seguintes conjuntos são variedades algébricas:
1. Ak � tx P Rm : xk�11 � x2
2 � x¥3 � 0u, k ¥ 1;
2. Dk � tx P Rm : x21x2 � xk�1
2 � x¥3 � 0u, k ¥ 4;
3. E6 � tx P Rm : x31 � x4
2 � x¥3 � 0u;
4. E7 � tx P Rm : x31 � x1x
32 � x¥3 � 0u;
5. E8 � tx P Rm : x31 � x5
2 � x¥3 � 0u.
1.4 Problema A
No que segue trabalharemos com germes de funções, germes de formas diferenciáveis
e germes de variedades tendo como fonte e meta a origem.
Na de�nição 1.25 vimos o que é um simplectomor�smo, mas agora nós consideramos
aqueles que tem a seguinte propriedade: φ : pR2n, 0q ÝÑ pR2n, 0q um germe de difeomor-
�smo do espaço simplético pR2n, ωq tal que φ�pωq � ω. No que segue sempre que dizemos
simplectoformismo, estaremos falando de simplectomor�smo da de�nição 1.25 junto com
a propriedade acima.
De�nição 1.66: Sejam N1, N2 � R2n subconjuntos que contém a origem. Estes são
chamados de simplectomorfos se existe um simplectomor�smo φ tal que φpN1, 0q � pN2, 0q

Capítulo 1. Preliminares 17
Teorema 1.67 (Darboux-Givental ver [A-G]): 1. Sejam N � R2n uma subvariedade
e ω0, ω1 duas formas simpléticas em R2n com a mesma restrição a TN . Então existe
um germe de difeomor�smo Φ : pR2n, 0q ÝÑ pR2n, 0q tal que Φpxq � x para todo
x P N e Φ�ω0 � ω1.
2. Duas subvariedades N1, N2 do espaço simplético pR2n, ωq de igual dimensão são
simplectomorfos se e somente se as restrições ω|TN1 , ω|TN2 são difeomorfas.
De�nição 1.68: Seja ω uma 2-forma numa variedade suave Mn � Rm, então existe
associada uma matriz quadrada com coe�cientes reais. O posto da matriz na origem é
chamado de posto de ω.
De�nição 1.69: De�nimos SymppR2nq o conjunto das 2-formas simpléticas em R2n e
SymppR2nq|Rr � tω|TRr {ω P SymppR2nqu.
Teorema 1.70 (ver [A-G]): SymppR2nq|Rr consiste das 2-formas fechadas em Rr de
posto maior ou igual que 2pr � nq.
O presente trabalho é dedicado a resolver o seguinte problema.
Problema A: Classi�car com respeito ao grupo dos simplectomor�smos a classe de todas
as variedades algébricas no espaço simplético pR2n, ωq que são difeomorfas a uma variedade
algébrica �xa N , onde N é
1. Ak � x P R2n : xk�1
1 � x22 � x¥3 � 0
(, k ¥ 1;
2. Dk � x P R2n : x2
1x2 � xk�12 � x¥3 � 0
(, k ¥ 4;
3. E6 � tx P R2n : x31 � x4
2 � x¥3 � 0u;
4. E7 � tx P R2n : x31 � x1x
32 � x¥3 � 0u;
5. E8 � tx P R2n : x31 � x5
2 � x¥3 � 0u.
Exemplo 1.71 (Exemplo de simplectomor�smos): Considere n ¥ 2, sejaN �xo qualquer
dos conjuntos Ak, Dk, E6, E7, E8 acima e considere ω � dx1^dy1�dx2^dy2�. . .�dxn^dyn
a forma simplética em R2n. Sejam φ, ρ funções suaves reais de�nidas num invertalo aberto
I � R, que levam o zero no zero. Considere
Φpx1, . . . ynq � px1 � φpy1q, x2 � ρpy2q, x3, . . . , ynq
18 Capítulo 1. Preliminares
então Φ é um simplectomor�smo. De fato
Φ�pωq � dpx1 � φpy1qq ^ dy1 � dpx2 � ρpy2qq ^ dy2 � . . .� dxn ^ dyn
� pdx1 � φ1py1qdy1q ^ dy1 � pdx2 � ρ1py2qdy2q ^ dy2 � . . .� dxn ^ dyn
� dx1 ^ dy1 � φ1py1qdy1 ^ dy1 � dx2 ^ dy2 � ρ1py2qdy2 ^ dy2 � . . .� dxn ^ dyn
� dx1 ^ dy1 � dx2 ^ dy2 � . . .� dxn ^ dyn
� ω
Por outro lado se p � pa1, . . . , an, b1, . . . , bnq P N , então Hpa1, a2q � 0 e a3 � . . . �
an � b1 . . . � bn � 0 (no caso n � 2, b1 � b2 � 0). Logo
Φppq � pa1 � φpb1q, a2 � ρpb2q, a3, . . . , bnq
� p
pois φp0q � ρp0q � 0.

Capítulo
2O método das restrições algébricas
Este trabalho esta baseado do seguinte artigo [D-J-Z].
Neste capítulo de�nimos o espaço vetorial das restrições algébricas (é uma generali-
zação da de�nição dada em [Z] de restrições algébricas de 1-formas), a ação do grupo
de simetrias locais neste espaço vetorial, revisamos um resultado do grupo de cohomo-
logia, estudamos alguns teoremas e além disso resolveremos o Problema A para o caso
N � tAk � 0u, k P N. No caso geral de N , reduzimos o Problema A ao Problema B.
No que segue omitiremos as palavras suave e diferenciável, lembramos também que
trabalhamos com germes de funções e de variedades tendo como fonte e meta a origem.
Além disso p sempre denotara um número natural.
2.1 De�nição de restrição algébrica
Dado um germe de uma variedade pM, 0q denote por ΛppMq o R-espaço vetorial de
todos os germes em x � 0, das p-formas diferenciáveis em M (aqui consideramos as p-
formas a diferença das k-formas na subseção 1.1.2). Dado um subconjunto N � M tal
que 0 P N , de�nimos os seguintes R-subespaços vetorias de ΛppMq
ΛpNpMq � tω P ΛppMq : ωpxq � 0, @x P Nu ;
A p0 pN,Mq �
α � dβ : α P Λp
NpMq, β P Λp�1N pMq
(.
Observação 2.1: Seja ω P ΛpNpMq, lembre que ωpxq � 0 signi�ca ωpxqpv1, v2, . . . , vpq �
0, @x P pN, 0q, @vi P TxM, i � 1, . . . , p. Seja m � dimM , dado pU, x1, . . . , xmq um
sistema de coordenadas local de M em x0 P N existem funções fi1,i2,...,ip : U Ñ R, com1 ¤ i1 . . . ip ¤ m tais que
ωpxq �¸
1¤i1 ... ip¤2n
fi1,i2,...,ippxqdxi1 ^ dxi2 ^ . . .^ dxip , para todo x P U. (2.1)
19

20 Capítulo 2. O método das restrições algébricas
Agora de ωpx0q � 0 segue que fi1,i2,...,ippx0q � 0. Portanto temos que os coe�cientes de ω
se anulam em x P pN, 0q.
Vejamos o que acontece no caso em que pN, 0q � pM, 0q é um subvariedade, onde
(M,0) é uma subvariedade de Rk.
Proposição 2.2: Se N é uma subvariedade de M então uma p-forma ω em M satisfaz:
ω|TN � 0 ðñ ω P A p0 pN,Mq.
Demonstração: Suponha dimM � m e dimN � n. Temos que existe pU, φ �
px1, . . . , xmqq sistema de coordenadas local de M em x � 0 tal que φ : U X N ÝÑ
V � Rn � t0u , isto é, φpxq � px1pxq, x2pxq, ..., xnpxq, 0, ..., 0q para todo x P N XU e ω é
como na Equação (2.1).
Suponha que ω|TN � 0.
Então
ωpxq �¸
1¤i1 ... ip¤m
fi1,i2,...,ippxqdxi1 ^ dxi2 ^ ...^ dxip
�¸
1¤i1 ... ip¤m
fi1,i2,...,ippxq dxi1 ^ dxi2 ^ ...^ dxiplooooooooooooomooooooooooooonnão aparece dxk, n�1¤k¤m
�m
i�n�1
dxi ^ µiloomoonpp�1q�forma
segue do Lema de Hadamard aplicado a cada fi1,i2,...,ip na origem pfi1,i2,...,ipp0q � 0q que
ω �m
i�n�1
xiαi �m
i�n�1
dxi ^ µi, onde as αi são p-formas. Usando o fato dpxiµiq � dxi ^
µi � xidµi, temos ω �°xipαi � dµiq � dp
°xiµiq. Portanto ω P A
p0pN,Mq.
Reciprocamente, suponha que ω P A p0 pN,Mq, então existem Λp
NpMq, β P Λp�1N pMq
tais que ω � α � dβ, logo pelo Lema de Hadamard em α e β temos
ω �m
i�n�1
xiαi � dpm
i�n�1
xiµiq
�m
i�n�1
xipαi � dµiq �m
i�n�1
dxi ^ µi
e portanto obtemos ω|TN � 0.
Agora dada uma subvariedade Mm de Rl de�nimos uma relação de equivalência no
espaço ΛppMq para um subconjunto pN, 0q qualquer de pM, 0q.
De�nição 2.3 (Restrição algébrica): Seja Mm � Rl uma subvariedade, N um sub-
conjunto de M e ω, ω P ΛppMq. De�nimos a relação de equivalência "�N" em ΛppMq

Capítulo 2. O método das restrições algébricas 21
por:
ω �N ω ô ω � ω P A p0 pN,Mq.
Denotamos por rΛppMqsN o conjunto de classes de equivalência. A órbita de ω P ΛppMq
é chamada de restrição algébrica de ω a N(ou também restrição algébrica a N de ω) e é
denotada por rωsN . Note que 0 � r0sN � A p0 pN,Mq.
Note também que o R-espaço vetorial A p0 pN,Mq induz uma estrutura de R-espaço
vetorial natural em rΛppMqsN .
Proposição 2.4: Sejam pM, 0q � Rl uma subvariedade, pN, 0q um subconjunto de
pM, 0q, ω uma p-forma pp P Nq, µ uma q-forma pq P N0q em pM, 0q, então temos
1. Se ω P A p0 pN,Mq então dω P A p�1
0 pN,Mq.
2. Se ω P A p0 pN,Mq então ω ^ µ P A p�q
0 pN,Mq.
Demonstração:
1. Segue do fato d2 � 0.
2. Da hipótese segue que ω � α � dβ com α P ΛpNpMq, β P Λp�1
N pMq.
Se q ¥ 1, ω ^ µ � α ^ µ � dβ ^ µ e como dβ ^ µ � dpβ ^ µq � p�1qqβ ^ dµ
obtemos
ω ^ µ � α ^ µ� p�1qqβ ^ dµ� dpβ ^ µq P A p�q0 pN,Mq,
pois α ^ µ � p�1qqβ ^ dµ P Λp�qN pMq, β ^ µ P Λp�q�1
N pMq.
Se q � 0, segue de dpβµq � pdβqµ� β ^ dµ.
A Proposição 2.4 garante que as seguintes aplicações estão bem de�nidas.
De�nição 2.5: Seja pM, 0q � Rl uma subvariedade, pN, 0q � pM, 0q um subconjunto,
q P N0, p P N . Então temos
rΛppMqsN ÝÑ rΛpp�1qpMqsN rΛppMqsN � rΛqpMqsN ÝÑ rΛpp�qqpMqsN
rωsN ÞÝÑ rdωsN prωsN , rαsNq ÞÝÑ rω ^ αsN
Denotamos estas operações por d e ^ respectivamente. Assim temos drωsN � rdωsN e
rωsN ^ rαsN � rω ^ αsN .
A Proposição 2.4 também garante que no caso q � 0 temos que rΛppMqsN tem uma
estrutura de Λ0pMq-módulo onde a operação e dada por pf, rθsNq ÞÑ rf.θsN . Denotamos
por xrθsNy o Λ0pMq-submódulo gerado por rθsN P rΛppMqsN .

22 Capítulo 2. O método das restrições algébricas
Exemplo 2.6: (Restrições algébricas de 2-formas a Ak) Neste exemplo obtemos uma
base para o espaço vetorial rΛ2pR2nqsN , onde N � Ak � tx P R2n : xk�11 � x2
2 � x¥3 � 0u
e k ¥ 1.
Seja Hpxq � xk�11 � x2
2, por de�nição segue que
rdHsN � rdx¥3sN � 0, (2.2)
logo pela Proposição 2.4
rdH ^ dx1sN � rdH ^ dx2sN � 0,
isto é, �BH
Bx2
dx1 ^ dx2
�N
�
�BH
Bx1
dx1 ^ dx2
�N
� 0. (2.3)
Seja ω uma 2-forma, então por (2.2) temos rωsN � rfpx1, x2qdx1 ^ dx2sN . Da equação
(2.3) segue como caso particular: se f P x∇Hy � xx1k, x2y então rωsN � 0. No caso geral,
temos que existem funções fi, i � 0, . . . , k, de�nidas numa vizinhança da origem tais que
fpx1, x2q � fp0q � jk�1fp0q �k
i�0
x1ix2
k�ifipx1, x2q,
logo a Proposição 2.4 e o caso particular anterior implicam�°k
i�0 x1ix2
k�ifidx1 ^ dx2
�N�
0 e rjk�1fp0qdx1 ^ dx2sN ��°k�1
i�1 cix1idx1 ^ dx2
�Npara alguns ci P R, i � 1, . . . , k� 1.
Portanto
rωsN �
�k�1
i�0
cix1idx1 ^ dx2
�N
.
No Capítulo 4 mostraremos que�°k�1
i�0 cix1idx1 ^ dx2
�N� 0 se e somente se
°k�1i�0 x1
i P
xx1k, x2y, logo comparando os k-jatos temos ci � 0, i � 0, . . . , k � 1. Portanto trx1
idx1 ^
dx2sNuk�1i�0 é uma base do espaço vetorial rΛ2pR2nqsN .
Logo a dimensão do espaço das restrições algébricas em Ak de todas as 2-formas em
R2n é igual a k e este espaço é gerado pelas restrições denotadas por
rAksi � rx1
idx1 ^ dx2sAk. (2.4)
2.2 A ação do grupo das simetrias locais
Nesta seção dado um germe de subvariedade pM, 0q de Rn introduzimos uma ação
de um subgrupo do grupo de germes de difeomor�smos de M , DpMq � th : pM, 0q Ñ
pM, 0q{h é germe de difeomor�smou no espaço rΛppMqsN .

Capítulo 2. O método das restrições algébricas 23
Proposição 2.7: Sejam M � Rn e M � Rm variedades de mesma dimensão, e 0 P M
e 0 P M . Seja Φ : pM, 0q ÝÑ pM, 0q um germe de difeomor�smo e N � M suconjunto
tal que 0 P N . Então Φ�pA p0 pN,Mqq � A p
0 p�1pNq, Mq.
Demonstração: Considere ω P A p0 pN,Mq, então existem α P Λp
NpMq e β P Λp�1N pMq
tais que ω � α � dβ. Logo
Φ�ω � Φ�α � Φ�dβ � Φ�α � dpΦ�βq
onde Φ�α P ΛpΦ�1pNqpMq e Φ�β P Λp�1
Φ�1pNqpMq.
Agora suponha ω P A p0 pΦ
�1pNq, Mq, então existem α P ΛpNpMq e β P Λp�1
N pMq
tais que ω � α � dβ. Logo existe U uma vizinhança de x � 0 tal que α|Φ�1pNqXU �
β|Φ�1pNqXU � 0. Podemos escolher U de modo que existe V , uma vizinhaça de y � 0,
onde Φ|U : U ÝÑ V é difeomor�smo.
Seja ω :� ppΦ|Uq�1q�pωq, então temos Φ�ω � Φ�ppΦ|Uq
�1q�pωq � ω.
De�nição 2.8: Seja pN , 0q � pM, 0q e pN, 0q � pM, 0q. Duas restrições algébricas
rωsN P rΛppMqsN , rωsN P rΛppMqsN são difeomorfas, se existe, um germe de difeomor�smo
Φ : pM, 0q ÝÑ pM, 0q tal que ΦpN , 0q � pN, 0q e Φ�prωsNq � rωsN .
No caso N � N e M �M a Proposição 2.7 garante que a seguinte aplicação está bem
de�nida.
De�nição 2.9: Sejam N,M como na proposição anterior. De�nimos a aplicação� : DNpMq � rΛppMqsN ÝÑ rΛppMqsN
pΦ, rωsNq ÞÝÑ Φ�prωsNq � rΦ�ωsN
onde DNpMq denota o conjunto de germes de difeomor�smos deM que preservan N , seus
elementos são chamados de simtrias locais de N .
Observação 2.10: O conjunto de simetrias locais de N é um subgrupo de DpMq e a
aplicação da De�nição 2.9 é uma ação deste subgrupo no espaço rΛppMqsN .
2.3 Teorema de Redução
Agora suponha que N � Rm está contido numa subvariedade M de Rm. O seguinte
resultado mostra que a classi�cação das restrições algébricas das p-formas em Rm a N é
equivalente à classi�cação das restrições algébricas das p-formas em M a N .

24 Capítulo 2. O método das restrições algébricas
Proposição 2.11: Seja pM, 0q � Rm um germe de variedade e pN, 0q � pM, 0q subcon-
junto, sejam ω1, ω2 p-formas em Rm. Então rω1sN � rω2sN ðñ rω1|TM sN � rω2|TM sN .
Demonstração: Provaremos somente uma implicação.
Suponha que rω1sN � rω2sN . Isto signi�ca que existem α P ΛpNpRmq e β P Λp�1
N pRmq tais
que ω1�ω2 � α�dβ. Restringindo a TM temos pω1�ω2q|TM � α|TM�pdβq|TM � α|TM�
dpβ|TMq. Note que α|TM P ΛpNpMq e β|TM P Λp�1
N pMq, portanto rω1|TM sN � rω2|TM sN .
O seguinte Teorema generaliza a Proposição 2.11.
Teorema 2.12: Sejam pN1, 0q e pN2, 0q subconjuntos de pRm, 0q contidos nas subvarie-
dades de mesma dimensão pM1, 0q e pM2, 0q respectivamente. Sejam ω1 e ω2 germes de
p-formas em Rm. As restrições algébricas rω1sN1 e rω2sN2 são difeomorfas se e só se as
restrições algébricas rω1|TM1sN1 e rω2|TM2sN2 são difeomorfas.
Exemplo 2.13: (Classi�cação das restrições algébricas de 2-formas a Ak)
A curva Ak tem uma simetria local da forma Φpx1, x2q � px1φ2, x2φ
k�1q onde φ �
φpx1, x2q e φp0, 0q � 1. Considere as simetrias locais
Φr,spx1, x2q � px1p1� rxs1q2, x2p1� rxs1q
k�1q onde r, s P R, s ¥ 1.
Considere a P R então temos
Φr,s�ra xp1dx1 ^ dx2sAk
� rapx1p1� rxs1q2qppdpx1p1� rxs1q
2qq ^ dpx2p1� rxs1qk�1qsAk
� arpxp1p1� rxs1q2pqtp1� rxs1q
2�
� 2srxs1p1� rxs1qup1� rxs1qk�1dx1 ^ dx2sAk
� arxp1 p1� rxs1q2p�k�2p1� p2sr � rqxs1qdx1 ^ dx2sAk
� arxp1t2p�k�2¸i�0
p2p� k � 2
iqprxs1q
iup1� p2sr � rqxs1qdx1 ^ dx2sAk
� arpxp1 � p2p� k � 2qrxs�p1 � p2s� 1qrxs�p1 �
� o}px1q}p�sqdx1 ^ dx2sAk
� arpxp1 � rp2p� 2s� k � 3qxs�p1 � o}px1q}p�sqdx1 ^ dx2sAk
onde o}px1q}p�s representa a soma de monômios em x1 de grau ¡ p� s.
Logo se r � rp2p� 2s� k � 3q segue que
Φr,s�raAks
p P raAksp � rraAks
p�s � xrAksp�s�1, ..., rAks
k�1y. (2.5)

Capítulo 2. O método das restrições algébricas 25
Agora como r e s são quaisquer, segue que qualquer elemento do espaço a�m rAksp �
R rAks
p�1, ..., rAksk�1
(é difeomorformo a rAksp.
De fato, seja
rAksp �
k�1�p¸i�1
αirAksp�i P rAks
p � R rAks
p�1, ..., rAksk�1
(.
Para provar que é difeomorfo a rAksp é su�ciente aplicar Φr,s na equação (2.5) várias
vezes com adequados r e s. Por exemplo:
s � 1 e r1 �α1
2p�k�5temos
Φr1,1�rAks
p P rAksp � α1rAks
p�1 � b2rAksp�2 � R
rAks
p�3, ..., rAksk�1
(.
s � 2 e r2 �α2�b2
2p�k�7temos
Φr2,2�Φr1,1
�rAksp PΦr2,2
�rAksp � Φr2,2
�pα1rAksp�1q � Φr2,2
�pb2rAksp�2q�
� Φr2,2�pR
rAks
p�2, ..., rAksk�1
(,
• Φr2,2�rAks
p P rAksp � pα2 � b2qrAks
p�2 � R rAks
p�3, ..., rAksk�1
(,
• Φr2,2�pα1rAks
p�1q P α1rAksp�1 � R
rAks
p�3, ..., rAksk�1
(,
• Φr2,2�pb2rAks
p�2q P b2rAksp�2 � R
rAks
p�4, ..., rAksk�1
(,
• Φr2,2�pR
rAks
p�3, ..., rAksk�1
(q � R
rAks
p�3, ..., rAksk�1
(,
Portanto Φr2,2�Φr1,1
�rAksp P rAks
p � α1rAksp�1 � α2rAks
p�2 �R rAks
p�3, ..., rAksk�1
(.
Continuando com este procedimento obtemos Φ � Φr1,1 � Φr2,2 � ... � Φrk�1�p,k�1�p tal
que
Φ�rAksp � rAks
p �k�1�p¸i�1
αirAksp�i.
Logo qualquer restrição algébrica°k�1i�p αirAks
i tal que αp � 0 é difeomorfa a αprAksp.
Agora a restrição αprAksp é difeormorfo a rAks
p, para isso usamos simetrias locais
px1, x2q ÞÝÑ pt2x1, tk�1x2q e/ou px1, x2q ÞÝÑ px1,�x2q.
Por último, no Capítulo 5 se mostra, que se as restrições rAksi são difeomorfas rAksj
com 0 ¤ i j ¤ k�1, então os ideais xxi1, x2y e xxj1, x2y são isomorfos (este isomor�smo é
induzido por um germe de difeomor�smo) o que é uma contradição (como será feito numa
demonstração do Capítulo 5).
Assim obtemos:
Qualquer restrição algébrica de uma 2-forma em Rm a Ak é difeomorfa a uma e só
uma restrição algébrica rxi1dx1 ^ dx2sAk, i � 0, 1, . . . , k.

26 Capítulo 2. O método das restrições algébricas
2.4 Grupos de Cohomologia Relativa
O nome ”restrição algébrica” foi introduzida em rZs, mas tem uma relação entre
A p0 pN,Mq e o grupo de cohomologia relativo
HppN,Rmq �tω P A p
0 pN,Mq : dω � 0u dα : α P A p�1
0 pN,Rmq( .
De�nição 2.14: Um conjunto N � Rm é chamado quase-homogêneo se existe um sis-
tema de coordenadas local x1, x2, ..., xm e números positivos λ1, ..., λm tais que: se um
ponto com coordenadas xi � ai pertence a N então para qualquer t P r0, 1s o ponto com
coordenadas xi � tλiai tambem pertence a N , isto é,
pa1, a2, ..., amq P N ñ ptλ1a1, tλ2a2, ..., t
λnanq P N, @t P r0, 1s.
Teorema 2.15 (ver [R]): Se N � Rm é subconjunto quase-homogêneo então HppN,Rmq �
t0u, para qualquer p ¥ 1.
2.5 Teoremas A e B
Nesta seção estudamos os principais teoremas que serão usados em nossa classi�cação.
O método de restrições algébricas é baseado na seguinte generalização do Teorema
1.67.
Teorema 2.16 (Teorema A): 1. Seja pN, 0q � R2n um subconjunto quase-homogêneo.
Sejam ω0, ω1 formas simpléticas em R2n com a mesma restrição algébrica a N . En-
tão existe um germe de difeomor�smo Φ : pR2n, 0q ÝÑ pR2n, 0q tal que Φpxq � x
para todo x P pN, 0q e Φ�ω1 � ω0.
2. Dois subconjuntos quase-homogêneos N1, N2 de um espaço simplético �xado pR2n, ωq
são simplectomorfos se e somente se as restrições algébricas da forma simplética ω
a N1 e N2 são difeomorfas.
Observação 2.17: A prova mostrará que no Teorema A a hipótese de N ser quase-
homogênea pode ser substituída por H2pN,R2nq � t0u.
Antes de demonstrar o Teorema A vejamos uma aplicação, para isso �xamos as se-
guintes notações:
• rΛ2,closedpR2nqsN : O subespaço vetorial de rΛ2pR2nqsN das restrições algébricas de
todas as 2-formas fechadas em R2n a N .

Capítulo 2. O método das restrições algébricas 27
• rSymppR2nqsN : O subconjunto aberto de rΛ2,closedpR2nqsN das restrições algébricas
de formas simpléticas em R2n a N .
Considere o seguinte problema
Problema B: Classi�car as restrições algébricas no conjunto rSymppR2nqsN com respeito
ao grupo de simetrias locais de N .
Proposição 2.18: Seja N � R2n um conjunto quase-homogêneo então resolver o Pro-
blema B implica resolver o Problema A.
Demonstração: De fato, suponha que o problema B é resolvido, assim temos uma lista
de formas normais rθ1sN , ..., rθssN P rSymppR2nqsN , de restrições algébricas, onde θi são
2-formas i � 1, . . . , s. Logo existem formas simpléticas ωi tais que rωisN � rθisN , @i �
1, . . . , s.
Agora, dado um espaço simplético pR2n, ω0q, tomamos os germes de difeomor�smos φi :
pR2n, 0q ÝÑ pR2n, 0q tais que Φ�i pωiq � ω0, i � 1, . . . , s (existem pelo Teorema Clássico de
Darboux).
Considere N i � Φ�1i pNq,1 ¤ i ¤ s. Suponha que N i e N jpi � jq são simplectomofor-
mos, logo existe φ : pR2n, 0q Ñ pR2n, 0q tal que φ�ω0 � ω0 e φpN jq � N i, então temos que
ψ � Φi � φ � Φ�1j é uma simetria local que leva rωisN em rωjsN difeomor�camente, o que
é uma contradição.
Agora suponha que N0 é difeomorfo a N , isto é, existe ψ : pR2n, 0q Ñ pR2n, 0q tal que
ψpNq � N0.
Então temos que
ψ�prω0sN0q � rψ�ω0sN ,
logo pela hipótese existe φ : pR2n, 0q Ñ pR2n, 0q simetria local de N tal que para algum i
φ�rψ�ω0sN � rωisN .
O que implica φ�ψ�prω0sN0q � rωisN consequentemente Φi�φ�ψ�prω0sN0q � rω0sN i , por-
tanto rω0sN0 e rω0sN i são difeomorfos e pelo Teorema A (2) N0 e N i são simplectomorfos.
Logo N1, ..., N s é uma lista �nal das formas normais do Problema A.
Como já foi mencionado para o caso N � Ak o Problema A foi estudado por V.
Arnol'd em [A] para k par.

28 Capítulo 2. O método das restrições algébricas
Note que para n ¥ 2 temos
Ak � R2 � t0u2n�2 �M0.
Seja ω uma 2-forma, então rωsAk� r
°cix
idx1 ^ dx2sAk, logo pela Proposição 2.11
rω|TM0sAk� rp
°cix
idx1 ^ dx2q|TM0sAkonde posto p
°cix
idx1 ^ dx2q ¥ 0 ¥ 2p2� nq
assim pelo Teorema 1.70 existe β P SymppR2nq tal que rω|TM0sAk� rβ|TM0sAk
, que
implica rωsAk� rβsAk
.
Isto quer dizer que qualquer restrição algébrica de uma 2-forma em R2n a Ak pode ser
representada pela restrição algébrica de uma forma simplética, no caso n ¥ 2.
Portanto os resultados dos Exemplos 2.6 e 2.13 mostram que na classi�cação do pro-
blema B com N � Ak � R2n¥4 há exatamente k � 1 órbitas
rAksi � rxi1dx1 ^ dx2sAk
, i � 0, 1, ..., k.
Note que para i � 1, . . . , k, xi1dx1 ^ dx2 não são 2-formas simpléticas, mas como rAksi P
rSymppR2nqsAk, existe um representante simplético de rAksi. Considere por exemplo as
formas simpléticas
θk � dx1 ^ dx3 � dx2 ^ dx4 � dx5 ^ dx6 � ...� dx2n�1 ^ dx2n;
θi � xi1dx1 ^ dx2 � θk, 0 ¤ i ¤ k � 1.
Então rAksi � rθisAk, @i � 1, . . . , k.
Dada uma forma simplética ω qualquer, �xe o difeomor�smo local φi que leva θi a ω,
i � 0, 1, ..., k. Seja
Aik � φ�1i pAkq. (2.6)
Suponha que C é uma curva singular no espaço simplético pR2n, ωq que é difeomorfo a
Ak, então existe f : pR2n, 0q ÝÑ pR2n, 0q germe de difeomor�smo tal que fpAkq � C
logo temos que f�rωsC � rf�ωsAk, isto diz que rωsC e rf�ωsAk
são difeomorfos, agora pelo
anterior existe i P t0, 1, . . . , ku tal que rf�ωsAké difeomorfa rAksi. Como rAksi é difeomorfo
a rωsAiksegue que rωsC é difeomorfo a rωsAi
k, portanto o Teorema A (2) implica que C é
simplectomorfa a Aik.
Assim qualquer curva no espaço simplético pR2n, ωq é simplectomorfa a uma e apenas
uma das curvas A0k, ..., A
kk. Isso dá a classi�cação obtida em [A].
Vejamos agora a demonstração do Teorema A. Para isso começamos com alguns lemas
que são usados também depois.
Lema 2.19: Seja pM, 0q � pRm, 0q uma subvariedade, pN, 0q � pM, 0q. Então existe um
germe de submersão π : pRm, 0q Ñ pM, 0q tal que πpxq � x, @x PM .

Capítulo 2. O método das restrições algébricas 29
Demonstração: Como M é subvariedade, existe uma carta pΨ, Uq de Rm em x � 0 tal
que Ψ : U Ñ Rm, 0 P U,Ψp0q � 0 e
ΨpU XMq � tpx1, x2, ..., xs, 0, ..., 0q,�εi ¤ xi ¤ ε, εi ¡ 0, 1 ¤ i ¤ su onde s � dimM .
Posso considerar U tal que ΨpUq contém um retângulo aberto
V � p�γ1, γ1q � p�γ2, γ2q � � � � � p�γm, γmq.
De�nimos π : V Ñ Rs � t0um�s, por πpx1, ..., xs, xs�1, ..., xmq � px1, ..., xs, 0, ..., 0q.
De�nimos π � Ψ�1 � π �Ψ : Ψ�1pV q ÑM , então π satisfaz as condições requeridas.
Lema 2.20: Seja N � Rl um subconjunto, W � T0Rl o espaço tangente de alguma
subvariedade contendo N de dimensão mínima entre tais subvariedades. Se ω é uma
p-forma com rωsN � 0 então ω|W � 0.
Demonstração: Fixe uma subvariedade M contendo N de dimensão minima entre
tais subvariedades, tome W � T0M . Pela Proposição 2.11 como rωsN � 0, temos que
rω|TM sN � 0, isto é, existem α P ΛpNpMq, β P Λp�1
N pMq e
ω � α � dβ.
Agora pela minimalidade da dimensão deM , N não está contido em qualquer hipersuper-
fície de M , portanto qualquer função que se anula em N tem 1-jato zero em 0. De fato,
se f é uma função que se anula em N com 1-jato não nulo, então d0f é submersão, logo
0 � fp0q é um valor regular e portanto f�1p0q é uma hipersuperfície de M que contém
N .
Segue que dβp0q � 0 e então ω|TMp0q � 0, isto é ω|W � ω|T0M � 0.
Lema 2.21: Seja N � Rl um subconjunto, ω uma 2-forma fechada em Rl com restrição
algébrica zero a N . Seja M � Rl uma subvariedade contendo N de dimensão mínima
entre tais subvariedades. Então existe uma 2-forma fechada θ em Rl tal que θ|TM � ω|TM ,
rθsN � 0 e θp0q � 0.
Demonstração: Seja µ � ω|TM , pela demonstração do Lema 2.20 temos µp0q � 0. Seja
π como no Lema 2.19 e θ � π�µ. Então θ é uma 2-forma fechada (pois ω é uma 2-forma
fechada) que se anula em 0 (pois πp0q � 0) e cuja restrição a TM coincide com a restrição

30 Capítulo 2. O método das restrições algébricas
de ω a TM (θ|TM � ω|TM), de fato:
θ|TM � pπ�µq|TM � µ|TM � ω|TM ,
onde a penúltima igualdade segue de πpxq � x, @x PM .
Desde que rωsN e ω|TM � θ|TM , pela Proposição 2.11 obtemos rθsN � rωsN � 0.
A seguir provaremos o Teorema A, primeiro reduzimos o Teorema A (1) ao caso em que
as formas simpléticas ω0 e ω1 satisfazem a condição pω0 �ω1qp0q � 0 e depois provaremos
o Teorema A neste caso particular.
Redução do Teorema A (1) ao caso pω0 � ω1qp0q � 0
TomeM � R2n uma subvariedade contendoN de dimensão mínima entre tais subvarie-
dades (esta variedade existe pois o conjunto de todas as variedades que contém N é não va-
zio). Pelo Lema 2.21 existe θ, uma 2-forma fechada em R2n tal que θ|TM � ω0|TM�ω1|TM ,
rθsN � 0 e θp0q � 0. Seja ω � ω1�θ, então ω0, ω1, ω satisfazem as seguintes propriedades:
• ω|TM � ω0|TM .
• rωsN � rω1sN , pω � ω1qp0q � 0.
• ω é simplética.
A última propriedade segue dos seguintes fatos: i) θp0q � 0 e ω é fechado. ii) Toda
2-forma em R2n induz uma matriz quadrada de ordem 2n que varia continuamente. iii)
Uma 2-forma em R2n é simplética se e somente se a matriz induzida é invertível. iv)
GLp2nq é um aberto do espaço de matrizes reais 2n� 2n.
Pelo Teorema 1.67 existe Φ : pR2n, 0q Ñ pR2n, 0q germe de difeomor�smo tal que
Φpxq � x, @x PM e Φ�ω � ω0.
Note que ω e ω1 satisfazem as condições do Teorema A (1) com a condição adicional
pω�ω1qp0q � 0, portanto o Teorema A (1) para as formas ω0 e ω1 é provado se provarmos
este Teorema para as formas ω1 e ω, com a condição pω � ω1qp0q � 0.
Prova do Teorema A (1) no caso pω0 � ω1qp0q � 0
Demonstração: Provaremos a existência de uma família de difeomor�smos Φt :
pR2n, 0q ÝÑ pR2n, 0q que preservam pontualmente N e Φ�t pωtq � ω0 onde ωt � ω0 �
tpω1 � ω0q, para qualquer t P r0, 1s. Esta família será encontrada dentro das famílias que
satisfazem a EDOdΦt
dt� VtpΦtq,Φ0 � idR2n

Capítulo 2. O método das restrições algébricas 31
onde Vt é uma família de campos de vetores em R2n que se anulam em qualquer ponto de
N(o último implica que Φt preserva N pontualmente).
Então é su�ciente provar a existência destes campos de vetores. Lembramos que LV é a
derivada de Lie ao longo de um campo vetorial V .
A equação Φ�t ωt � ω0 é equivalente à equação LVtpωtq �
dωtdt
� 0 (de fato, é su�ciente
aplicar a equação (1.3) ). Da Fórmula de Cartan e do fato ωt ser fechada obtemos
dpiVtpω0 � tpω1 � ω0qqq � ω0 � ω1 (2.7)
Desde que N é quase-homogêneo, pelo Teorema 2.15 HppN,R2nq � 0, p ¥ 1, assim
para p � 2 temos ω0 � ω1 � dβ, onde rβsN � 0.
Portanto para resolver (2.7) é su�ciente resolver a equação
iVtpω0 � tpω1 � ω0qq � β (2.8)
Esta equação pode ser tratada como um sistema linear de equações nas variáveis
x P R2n próximo de 0 e t P r0, 1s.
A suposição pω0 � ω1qp0q � 0 implica que pω0 � tpω1 � ω0qqp0q � ω0p0q e como a
forma ω0 é simplética temos que as 2-formas pω0� tpω1�ω0qq têm posto máximo 2n para
qualquer t P r0, 1s e para qualquer x próximo de 0.
Portanto para tais t e x, a matriz do sistema linear (2.8) é não-degenerada e conse-
quentemente (2.8) tem solução única Vt, esta solução se anula em qualquer ponto de N
pois de iVtpωtq � β temos ωtpxqpVtpxq, vq � βpxqpvq @x P R2n, @v P R2n, logo @x P N
ωtpxqpVtpxq, vq � βpxqpvq � 0, @v P R2n.
Como a matriz do sistema linear (2.8) é não-degenerada obtemos Vtpxq � 0 @x P N .
Prova do Teorema A (2)
Demonstração: Suponha primeiroN1 eN2 simplectomorfos, então existe Φ : pR2n, 0q Ñ
pR2n, 0q germe de difeomor�smo tal que Φ�ω � ω e ΦpN1q � N2, logo temos Φ�prωsN2q �
rΦ�ωsN1 � rωsN1 e portanto rωsN1 e rωsN2 são difeomorfos.
Agora suponha rωsN1 e rωsN2 são difeomorfos então existe Φ : pR2n, 0q Ñ pR2n, 0q germe
de difeomor�smo tal que Φ�prωsN2q � rωsN1 e ΦpN1q � N2 isto é rΦ�ωsN1 � rωsN1 . Como
Φ�ω é uma forma simplética, pelo Teorema A 1), temos que existe Ψ : pR2n, 0q Ñ pR2n, 0q
germe de difeomor�smo tal que Ψpxq � x, @x P N1 e Ψ�pΦ�ωq � ω.
Assim Φ�Ψ é um germe de difeomor�smo que satisfaz pΦ�Ψq�ω � ω e Φ�ΨpN1q � N2.
Portanto N1 e N2 são simplectomorfos.

32 Capítulo 2. O método das restrições algébricas
O signi�cado geométrico dessa classi�cação é também uma aplicação do método das
restrições algébricas. Como será mostrado abaixo.
Proposição 2.22: Se N1 e N2 são subconjuntos difeomorfos das variedades Lagrangia-
nas M1 e M2 respectivamente num espaço simplético �xado pR2n, ωq, então N1 e N2 são
simplectomorfos.
Mas como veri�camos se um subconjunto de uma variedade simplética está contido
numa subvariedade Lagrangiana?. Para responder essa pergunta temos o seguinte teo-
rema.
Teorema 2.23 (Teorema B): Um subconjunto quase-homogêneo N de um espaço sim-
plético pR2n, ωq está contido numa subvariedade Lagrangiana se e somente se rωsN � 0.
Antes de demonstrar o Teorema B vejamos uma aplicação.
Exemplo 2.24: Seja C uma curva no espaço simplético pR2n, ωq, com n ¥ 2 difeomorfa
a Ak. Seja Akk de�nida na equação (2.6). Pelo teorema B, a curva C está contida numa
subvariedade Lagrangiana se e somente se C é simplectomorfo a Akk.
De fato, primeiro suponha que C está contida numa subvariedade Lagrangiana M ,
dos resultados da subseção anterior, temos que C é simplectomorfo a Aik para algum i.
Note que pelo Teorema B, Akk está contida numa subvariedade Lagrangiana M1 pois da
equação (2.6) temos
rωsAkk� φ�kprθ
ksAkq � φ�kp0q � 0.
Assim, C é simplectomorfo a Akk pois rωsC � rωsAkk� 0.
Reciprocamente, suponha que C é simplectomorfo a Akk, então existe φ : pR2n, 0q Ñ
pR2n, 0q germe de difeomor�smo tal que φ�ω � ω e φpCq � Akk � M1, logo C �
φ�1pM1q �M2. Portanto será su�ciente mostrar que M2 é subvariedade Lagrangiana.
De dimM2 � dimM1 � n (pois φ é difeomor�smo) e iM2 � φ�1 � iM1 � φ onde
iMi: pMi, 0q ÝÑ pR2n, 0q, i � 1, 2 são as inclusões segue
iM2
�ω � pφ�1 � iM1 � φq�ω � φ�piM1
�pφ�1�pωqqq � φ�iM1
�pωq � φ�p0q � 0.
Portanto M2 é uma subvariedade Lagrangiana.
Agora vejamos a demonstração do Teorema B.

Capítulo 2. O método das restrições algébricas 33
Demonstração: Suponha que M é uma subvariedade Lagrangiana de pR2n, ωq tal que
N � M . Considere a inclusão i : M Ñ R2n então ω|TM � pi�ωq|TM � 0 logo pela
Proposição 2.11 temos rωsN � 0.
Reciprocamente, suponha rωsN � 0 e �xe uma subvariedadeM e uma 2-forma fechada
θ como no Lema 2.21:
θ|TM � ω|TM , rθsN � 0, θp0q � 0,
desde que θp0q � 0 a forma ω � θ é simplética (como na demonstração do Teorema A).
Note que a variedade M é isotrópica com respeito a ω � θ (pois θ|TM � ω|TM).
Como rω � θsN � rωsN , pelo Teorema A 1) existe Φ : pR2n, 0q Ñ pR2n, 0q germe de
difeomor�smo tal que
Φpxq � x, @x P N e Φ�pωq � ω � θ,
este difeomor�smo local leva M numa subvariedade M � ΦpMq que contém N e que é
isotrópica com respeito a ω, pois como Φ�pωq|TM � pω � θq|TM � 0 então ω|TM � 0.
Agora do fato que quaisquer subvariendades isotrópica esta contida numa subvari-
edade Lagrangiana existe P subvariedade Lagrangiana que contém M o que implica
N � Φ�1pP q, onde Φ�1pP q é uma variedade Lagrangiana.

Capítulo
3Invariantes Simpléticos
Lembremos que um invariante é aquelo que não muda em função de algumas operações,
por exemplo o Número de Milnor é um invariante com respeito à R-equivalência.Nesta seção estudaremos os invariantes simpléticos, isto é, aqueles invariantes com
respeito à ação do grupo de simetrias locais. O índice de isotropia foi de�nido por Arnol'd
em [A], generalizaremos esta de�nição e expressaremos este invariante em termos da
restrição algébrica. A multiplicidade simplética é de�nida como una generalização do
caso de uma curva parametrizada [I-J] e também será descrito en função da restrição
algébrica. Estas descripções são justamente os Teoremas C e D.
3.1 Teorema C e D
Começemos com o índice de isotropia, mas antes de de�nir-lo precisamos saber o que
é a ordem de anulamento.
De�nição 3.1: Seja ω um germe de uma forma diferenciável em R2n .
• Se ω tem k� 1-jato zero e k-jato não zero, dizemos que k é a ordem de anulamento
de ω.
• Se ωp0q � 0 então dizemos que a ordem de anulamento de ω é zero.
• Se ω � 0 ou na C8-categoria, ω tem expansão de Taylor zero, dizemos que a ordem
de anulamento de ω é 8.
De�nição 3.2: Seja N um subconjunto do espaço simplético pR2n, ωq. O índice de
isotropia de N é a ordem máxima de anulamento das 2-formas ω|TM sobre todas as
subvariedades M que contém N .
34

Capítulo 3. Invariantes Simpléticos 35
Observação 3.3: A de�nição de índice de isotropia é equivalente a: a ordem máxima
de tangência entre subvariedades que contém N e subvariedades isotrópicas de mesma
dimensão.
O índice de isotropia é zero se N não está contida em qualquer subvariedade que é
tangente a alguma subvariedade isotrópica de mesma dimensão. Se N está contida numa
subvariedade Lagrangiana, então o índice de isotropia é 8.
Teorema 3.4 (Teorema C): O índice de isotropia de uma variedade algébrica quase-
homogênea N num espaço simplético pR2n, ωq é igual à ordem máxima de anulamento das
2-formas fechadas que representam a restrição algébrica rωsN .
Como uma aplicação do Teorema C temos:
Exemplo 3.5: Sejam Aik as curvas de�nidas em (2.6) no espaço simplético pR2n, ωq.
Pelo Teorema C, o índice de isotropia de Aik é i se i ¤ k� 1, e o índice de isotropia de Akké 8, pois está contida numa subvariedade Lagrangiana.
Demonstração: Para provar o Teorema C será su�ciente provar as a�rmações seguintes:
1. Se M � pR2n, ωq é uma subvariedade contendo N e tal que a restrição ω|TM tem
k-jato zero, k ¥ 0, então existe uma 2-forma fechada ω em R2n com k-jato zero e
rωsN � rωsN .
2. Se ω é uma 2-forma fechada em R2n com k-jato zero, k ¥ 0, tal que rωsN � rωsN ,
então existe uma subvariedade M � R2n contendo N tal que a restrição ω|TM tem
k-jato zero.
Demonstração de 1)
Seja π : pR2n, 0q Ñ pM, 0q um germe de submersão tal que πpxq � x, @x PM , como no
Lema 2.19 e ω � π�pω|TMq. Então temos dω � dπ�pω|TMq � π�pdpω|TMqq � π�p0q � 0,
pois ω é fechada, assim ω é uma 2-forma fechada em R2n com k-jato zero. Por outro
lado, note que ω|TM � pπ�pω|TMqq|TM � ω|TM e portanto a Proposição 2.11 implica
rωsN � rωsN .
Demonstração de 2)
Considere a forma pω�ωq. Esta é uma forma simplética (pois ωp0q � 0) e rω�ωsN � 0
então pelo Teorema B, N está contida numa subvariedade Lagrangiana M com respeito
à forma simplética pω � ωq, isto signi�ca que pω � ωq|TM � 0.

36 Capítulo 3. Invariantes Simpléticos
Portanto, desde que ω tem k-jato zero, sua restrição a TM e, consequentemente, ω|TM
tem k-jato zero.
Continuemos com a multiplicidade simplética de uma variedade algébrica num espaço
simplético, para isso primeiro vejamos algumas de�nicições.
De�nição 3.6: Seja I um ideal no anel Λ0pRmq.
• O conjunto de zeros de I é o subconjunto de Rm consistindo dos pontos que anulam
qualquer função de I.
• Dizemos que I tem a propriedade de zeros se I contém qualquer função que se anula
em seu conjunto de zeros.
Observação 3.7: • No caso em que I é um ideal com a propriedade dos zeros e
I � xHy dizemos que H tem a propriedade dos zeros.
• No que segue uma variedade algébrica em Rm, signi�cará o conjunto de zeros de
algum ideal k-gerado tendo a propriedade de zeros pk ¥ 1q.
De�nição 3.8: Denote por V arpk,mq o espaço vetorial das variedades algébricas des-
critas por ideais k-gerados. Dado N P V arpk,mq denote por pNq a órbita de N com
respeito ao grupo dos difeomor�smos locais. A multiplicidade (ou número de Tjurina) de
N é a codimensão de pNq em V arpk,mq.
Observação 3.9: Para fazer precisa esta de�nição, deve se associar a N um germe de
função H : pRm, 0q Ñ pRk, 0q, cujas k componentes são geradores do ideal de funções que
se anulam em N . A órbita pNq pode ser identi�cada com a órbita de H com respeito à
K-equivalência (ou V -equivalência [A-V-G]).
Em vista da de�nição anterior, de�nimos a multiplicidade simplética de uma variedade
algébrica num espaço simplético como segue:
De�nição 3.10: Seja N uma variedade algébrica num espaço simplético pR2n, ωq. Seja
pNq a órbita de N com respeito ao grupo dos difeomor�smos locais e seja pNqSymp a órbita
de N com respeito ao grupo dos simplectomor�smos locais. A multiplicidade simplética
de N é a codimensão de pNqSymp em pNq.
Observação 3.11: Seja H : pR2n, 0q Ñ pRk, 0q um germe como acima, ou seja, suas k
componentes geram o ideal de funções que se anulam em N . Seja pHqK a órbita de H com

Capítulo 3. Invariantes Simpléticos 37
respeito à K-equivalência e seja pHqK,Symp a órbita de H com respeito à K-equivalênciasimplética. A K-equivalência simplética é de�nida analogamente à K-equivalência, a
diferença é que a mudança de coordenadas na fonte é um simplectomor�smo local. A
codimensão de pNqSymp em pNq é a codimensão de pHqK,Symp em pHqK.
Observação 3.12: Decorre do Teorema Clássico de Darboux outra de�nição equivalente
de multiplicidade simplética de um subconjunto N do espaço simplético pR2n, ωq: é a
codimensão da órbita de ω com respeito ao grupo de simetrias locais de N no espaço de
todas as 2-formas fechadas.
Portanto o Teorema A implica a seguinte teorema.
Teorema 3.13 (Teorema D): A multiplicidade simplética de uma variedade algébrica
quase-homogênea num espaço simplético pR2n, ωq é igual à codimensão da órbita da restri-
ção algébrica rωsN com respeito ao grupo de simetrias locais de N no espaço rΛ2,closedpR2nqsN .
Vejamos uma aplicação deste teorema.
Exemplo 3.14: Sejam Aik as curvas no espaço simplético pR2n, ω0q de�nidas em (2.6).
No exemplo 2.13 provamos que a restrição algébrica c0rAks0�...�ck�1rAks
k�1 é difeomorfa
a rAksp se e somente se c0 � c1 � ... � cp�1 � 0 e cp � 0. Portanto pelo Teorema D
a multiplicidade simplética da curva Aik é igual a i. Isto é satisfeito para todo i ¤ k (a
curva Akk corresponde à restrição algébrica zero que é no caso c0 � c1 � ... � ck�1 � 0).
3.2 O espaço rΛ2,closedpR2nqsN e o conjunto rSymppR2nqsN
Nesta seção estamos interessados em obter resultados envolvendo os conjuntos rΛ2pR2nqsN ,
rΛ2,closedpR2nqsN , rSymppR2nqsN . Este estudo será feito brevemente e continuado no Ca-
pítulo 5.
Em vista dos resultados da subseção prévia e com o objetivo de calcular uma base de
rΛ2,closedpR2nqsN de�nimos
spNq � dimRrΛ2,closedpR2nqsN ,
vamos apresentar um resultado sobre spNq, tendo como hipótese spNq 8. Primeiro
vejamos o seguinte lema.
Lema 3.15: Se a P rΛ2,closedpR2nqsN e a � 0, então a órbita de a com respeito ao grupo
de simetrias de N tem dimensão maior ou igual que 1.

38 Capítulo 3. Invariantes Simpléticos
Teorema 3.16: Seja N uma variedade algébrica quase-homogênea num espaço simplé-
tico pR2n, ωq tal que spNq 8. Então a multiplicidade simplética de N não excede spNq,
e é igual a spNq se e somente se N está contida numa variedade Lagrangiana.
Demonstração: A primeira a�rmação segue do Teorema D. Mostremos a segunda
a�rmação.
Pelo Teorema D a multiplicidade simplética é a codimensão da órbita da restrição
algébrica rωsN em rΛ2,closedpR2nqsN . Segue do Lema 3.15 que a dimensão dessa órbita é
maior o igual que 1 se rωsN � 0, portanto a multiplicidade simplética é spNq se e somente
se rωsN � 0. Pelo Teorema B, rωsN � 0 se e somente se N está contido numa subvariedade
Lagrangiana, portanto o resultado segue.
Agora queremos descrever o conjunto rSymppR2nqsN .
Teorema 3.17: Seja N � R2n um subconjunto, r � mintdimM{N �M, Msubvarieda-
deu. Seja M0 uma subvariedade tal que dimM0 � r e N � M0. A restrição algébrica
rθsN de uma 2-forma fechada θ pode ser representada por uma forma simplética em R2n
se e somente se postopθ|T0M0q ¥ 2r � 2n.
Demonstração: Segue do Teorema 1.70 que SymppR2nq|Rr consiste das 2-formas fecha-
das em Rr de posto ¥ 2pr � nq.
Suponhamos rθsN P rSymppR2nqsN , então existe α, uma 2-forma simplética, tal que
rθsN � rαsN . Logo rθ � αsN � 0, então pelo Lema 2.20 temos pθ � αq|T0M0 � 0, conse-
quentemente, θ|T0M0 � α|T0M0 e portanto postopθ|T0M0q = postopα|T0M0q ¥ 2pr � nq.
Agora suponha que postopθ|T0M0q ¥ 2r � 2n então θ|T0M0 P SymppR2nq|M0 , portanto
existe uma forma simplética α tal que θ|T0M0 � α|T0M0 , e portanto, pela Proposição 2.11
temos rθsN � rαsN .
Proposição 3.18: Seja N � R2n um subconjunto.
1. Se N está contido numa subvariedade 2-dimensional, então
rΛ2,closedpR2nqsN � rΛ2pR2nqsN .
2. Se N está contido numa subvariedade n-dimensional, então
rSymppR2nqsN � rΛ2,closedpR2nqsN .

Capítulo 3. Invariantes Simpléticos 39
Demonstração:
1. Por de�nição rΛ2,closedpR2nqsN � rΛ2pR2nqsN .
Seja rωsN P rΛ2pR2nqsN . Temos que existe U � R2n aberto que contém a origem e um
sistema de coordenadas x1, x2, . . . , x2n tais que U XN � tpx1, x2, 0, . . . , 0qu.
Do Teorema de Darboux ω|TU �°fijdxi ^ dxj, assim rω|TU sN � rpf12 � f21qdx1 ^
dx2sN , logo pela Proposição 2.11 rωsN � rpf12 � f21qdx1 ^ dx2sN . Isto signi�ca rωsN P
rΛ2,closedpR2nqsN . Portanto rΛ2,closedpR2nqsN � rΛ2pR2nqsN .
2. É su�ciente provar rΛ2,closedpR2nqsN � rSymppR2nqsN .
Sejam rωsN P rΛ2,closedpR2nqsN , r � mintdimM {N � M,M subvariedadeu e M0 uma
subvariedade que contém N de dimensão r. Por hipótese r ¤ n então postopω|T0M0q ¥
0 � 2n� 2n ¥ 2r � 2n, logo pelo Teorema 3.17, rωsN P rSymppR2nqsN .
Portanto rSymppR2nqsN � rΛ2,closedpR2nqsN .
Agora encontraremos uma base para rΛ2,closedpR2nqsN , quando N é quase-homogêneo
e o espaço rΛ2pR2nqsN tem dimensão �nita.
Seja ta1, ..., aku uma base de rΛ2pR2nqsN e considere as restrições algébricas tda1, ...daku
� rΛ3pR2nqsN . Seja p � dimRpR tda1, ...dakuq, p ¥ 0. Reordenando a1, ..., ak se necessário
temos que:
1. As restrições algébricas da1, ...dap são linearmente independentes.
Substituindo as restrições algébricas ai pp � 1 ¤ i ¤ kq, por ai �°pj�1 kijaj para
convenientes kij P R, podemos supor que:
2. dap�1 � ... � dak � 0.
Teorema 3.19: Seja N um subconjunto quase-homogêneo de R2n e ta1, ..., aku uma base
de rΛ2pR2nqsN satisfazendo 1q e 2q acima. Então tap�1, ..., aku é uma base do espaço
rΛ2,closedpR2nqsN .
Demonstração: Primeiro provemos que tap�1, ..., aku � rΛ2,closedpR2nqsN .
De fato, �xe i tal que pp�1 ¤ i ¤ kq. Seja ωi um representante de ai então ai � rωisN .
Desde que N é quase-homogêneo, pelo Teorema 2.15 H3pN,R2nq � 0, isto quer dizer que
para qualquer 3-forma ω que satisfaz rωsN � 0 e dω � 0 existe uma 2-forma α tal que
rαsN � 0 e dα � ω. Assim em particular para a 3-forma dωi existe uma 2-forma ωi tal
que dωi � dωi e rωisN � 0.

40 Capítulo 3. Invariantes Simpléticos
Logo a 2-forma ωi � ωi é fechada e ai � rωi � ωis, portanto ai P rΛ2,closedpR2nqsN , para
p� 1 ¤ i ¤ k.
Agora provemos que tap�1, ..., aku é base de rΛ2,closedpR2nqsN .
Seja rωsN P rΛ2,closedpR2nqsN � rΛ2pR2nqsN , então rωsN � c1a1 � ...� ckak, logo
0 � rdωsN � c1da1 � ...� cpdap � cp�1dap�1 � ...� ckdak.
Segue de 1) e 2) que c1 � c2 � ... � cp � 0, portanto rωsN P R tap�1, ..., aku.
Portanto R tap�1, ..., aku � rΛ2,closedpR2nqsN .

Capítulo
4O método das restrições algébricas para
curvas
Resolver o Problema A, implica ter que classi�car rΛ2pR2qstH�0u com respeito ao
grupo de simetrias locais é por isso que neste capítulo restringimos nossos resultados
a rΛ2pR2qstH�0u, onde H P Λ0pR2q é quase-homogêneo.
As duas primeiras seções é dedicado para que dado a P rΛ0pR2qstH�0u obter uma
maneira simples de calcular o espaço tangente a a. Na última seção provaremos dois
teoremas fundamentais para fazer a classi�cação de rΛ2pR2qstH�0u com respeito ao grupo
de simetrias locais. Esta classi�cação porém será feita no capítulo seguinte.
De�nição 4.1: Um polinômio Hpx1, x2q P Λ0pR2q é quase-homogêneo se existem nú-
meros positivos λ1, λ2 (pesos de quase-homogeneidade) e um número positivo d (grau de
quase-homogeneidade) tais que
Hptλ1x1, tλ2x2q � tdHpx1, x2q, @t P R (4.1)
ou equivalentemente, se Hpx1, x2q é uma combinação linear de monômios xα11 x
α22 que
satisfazem α1λ1 � α2λ2 � d.
De�nição 4.2: Seja H P Λ0pR2q. O quocienteΛ0pR2q
x∇Hyé chamado de álgebra local de H
e a dimensão deste espaço é chamada de multiplicidade de H (note que na verdade é o
número de Milnor de H no capítulo 1).
Neste capítulo Hpx1, x2q é um polinômio quase-homogêneo com pesos λ1 e λ2 que tem
a propriedade dos zeros e multiplicidade �nita µ. Também assumiremos que quaisquer
germe em Λ0pR2q que seja quase-homogêneo, terá pesos λ1 e λ2.
41

42 Capítulo 4. O método das restrições algébricas para curvas
Lema 4.3: Seja H � Hpx1, x2q um polinômio quase-homogêneo com grau de quase-
homogeneidade δ. Então H � λ1x1
δ
BH
Bx1
� λ2x2
δ
BH
Bx2
.
Demonstração: De fato, derivando com respeito a t na equação (4.1) e fazendo t � 1
obtemos
λ1x1BH
Bx1
� λ2x2BH
Bx2
� δH.
O seguinte lema caracteriza as 2-formas em R2 que têm restrição algébrica zero no
caso em que N é o conjunto de zeros de um polinômio quase-homogêneo.
Lema 4.4: Seja H � Hpx1, x2q um polinômio quase-homogêneo. Uma 2-forma fdx1 ^
dx2 em R2 tem restrição algébrica zero à curva tH � 0u se e somente se f P x∇Hy.
Demonstração: Primeiramente note que do Lema 4.3 H P x∇Hy e por conseguinte
xH,∇Hy � x∇Hy.Suponha que rfdx1 ^ dx2stH�0u � 0. Como H tem a propriedade dos zeros, existem
A,B1, B2 P Λ0pR2q tais que
fdx1 ^ dx2 � AHdx1 ^ dx2 � dpHB1dx1 �HB2dx2q
� HpA�BB1
Bx2
�BB2
Bx1
qdx1 ^ dx2 �B1BH
Bx2
dx1 ^ dx2 �B2BH
Bx1
dx1 ^ dx2
logo f P xH,∇Hy � x∇Hy.Agora suponha que f P x∇Hy � xH,∇Hy, ou seja existem A,B,C P Λ0pR2q tais
que f � AH � BHBx1B � BH
Bx2C logo
fdx1 ^ dx2 � pAH �BH
Bx1
B �BH
Bx2
Cqdx1 ^ dx2
� HpA�BB
Bx1
�BC
Bx2
qdx1 ^ dx2 � dp�HCdx1 �HBdx2q
em conclusão rfdx1 ^ dx2stH�0u � 0.
4.1 As simetrias in�nitesimais da curva tH � 0u
Como já foi mencionado, queremos calcular o espaço tangente de a P rΛ2pR2qstH�0u,
para isso nesta seção provamos que é possivel de�nir a derivada de Lie LV a, onde V é um
campo de vetores em Λ0pR2q que satisfaz algumas condições. Justamente esta derivada
permite calcular o espaço tangente de a.

Capítulo 4. O método das restrições algébricas para curvas 43
De�nição 4.5: De�nimos o conjunto de simetrias in�nitesimais da curva tH � 0u, de-
notado por SymminfptH � 0uq ou DerlogtH � 0u por
Derlog tH � 0u � tV é um campo de vetores em R2|V pHq P xHyu.
Observação 4.6: Note que DerlogtH � 0u é um R espaço vetorial, além disso com
respeito ao colchete de Lie este espaço é uma R-álgebra.
De�nição 4.7: De�nimos os seguintes campos vetoriais em R2
O campo vetorial de Euler:
E � λ1x1B
Bx1
� λ2x2B
Bx2
.
O campo vetorial Hamiltoniano:
H �BH
Bx2
B
Bx1
�BH
Bx1
B
Bx2
.
Como consequência imediata do Lema 4.3 temos o seguinte lema
Lema 4.8: Seja H � Hpx1, x2q um polinômio quase-homogêneo com grau de quase-
homogeneidade δ. Então EpHq � δH.
De�nição 4.9: Dizemos que uma 1-forma ω de�nida numa variedade Mn possui a pro-
priedade da divisão se para toda p-forma α em Mn (1 ¤ p ¤ n � 1) tal que ω ^ α � 0,
existe uma pp� 1q-forma β em Mn tal que α � ω ^ β.
Teorema 4.10 (ver rMs): Seja ω �°ni�1 fidxi uma 1-forma em Rn. Seja Ipωq �
xf1, . . . , fny. Se dimΛ0pRnq
Ipωqé �nito, então ω tem a propriedade da divisão.
O seguinte Lema foi usado em muitos trabalhos como por exemplo em [A], [Ly].
Lema 4.11: Qualquer campo vetorial V P Derlog tH � 0u tem a forma V � g1E� g2H
para alguns g1, g2 P Λ0pR2q.
Demonstração: Seja V P Derlog tH � 0u, então existe R P Λ0pR2q tal que V pHq � RH.
Pelo Lema 4.8 EpHq � δH, onde δ é o grau de quase-homogeneidade de H.
Seja V1 � V � RδE, então V1pHq � 0. Por outro lado existem A,B P Λ0pR2q tais que
V1 � A BBx1
�B BBx2
logo temos
pAdx2 �Bdx1q ^ dH � pAdx2 �Bdx1q ^ pBH
Bx1
dx1 �BH
Bx2
dx2q
� pABH
Bx1
�BBH
Bx2
qdx2 ^ dx1 � V1pHqdx2 ^ dx1 � 0.

44 Capítulo 4. O método das restrições algébricas para curvas
Agora como H tem multiplicidade �nita, pelo Teorema 4.10 dH tem a propriedade da
divisão, isto implica que existe R1 P Λ0pR2q tal que
Adx2 �Bdx1 � R1dH � R1BH
Bx1
dx1 �R1BH
Bx2
dx2
Logo R1H � R1BH
Bx2
B
Bx1
�R1BH
Bx1
B
Bx2
� AB
Bx1
�BB
Bx2
� V1 e por conseguinte
V �R
δE �R1H .
No que segue LV denota a derivada de Lie ao longo do campo vetorial V .
Lema 4.12: Sejam V P Derlog tH � 0u e θ P A 20 ptH � 0u ,R2q. Então LV pθq P
A 20 ptH � 0u ,R2q.
Demonstração: Pela de�nição de A 20 ptH � 0u ,R2q, e o fato de H ter a propriedade
dos zeros temos θ � AHdx1 ^ dx2 � dpBHdx1 � CHdx2q onde A,B,C P Λ0pR2q, logo
LV pθq �iV dpAHdx1 ^ dx2 � dpBHdx1 � CHdx2qq�
� dpiV pAHdx1 ^ dx2 � dpBHdx1 � CHdx2qqq
�dpiV pAHdx1 ^ dx2 � dpBHdx1 � CHdx2qqq
�dpiV ppAH �BpCHq
Bx1
�BpBHq
Bx2
qdx1 ^ dx2qq
Primeiro provemos que o Lema é valido para V � fE e V � gH .
1. V � gH � g BHBx2
BBx1
� g BHBx1
BBx2
. Temos
LV pθq � dpiV ppAH �BCH
Bx1
�BBH
Bx2
qdx1 ^ dx2qq
� dppgAH � gBCH
Bx1
� gBBH
Bx2
qpBH
Bx2
dx2 � p�BH
Bx1
qdx1qq
� dppgAH � gBCH
Bx1
� gBBH
Bx2
qdHq
� dpgAH � gBCH
Bx1
� gBBH
Bx2
q ^ dH
� �dpHdpgAH � gBCH
Bx1
� gBBH
Bx2
qq P A 20 ptH � 0u ,R2q
logo LV pθq P A 20 ptH � 0u,R2q.

Capítulo 4. O método das restrições algébricas para curvas 45
2. V � fE � λ1x1fBBx1
� λ2x2fBBx2
LV pθq � dpiV ppAH �BCH
Bx1
�BBH
Bx2
qdx1 ^ dx2qq
� dppfAH � fBCH
Bx1
� fBBH
Bx2
qpλ1x1dx2 � λ2x2dx1qq
� dpfAHpλ1x1dx2 � λ2x2dx1qq � dpτq
onde
τ � pfBCH
Bx1
� fBBH
Bx2
qpλ1x1dx2 � λ2x2dx1q
� λ1x1fBCH
Bx1
dx2 � λ1x1fBBH
Bx2
dx2 � λ2x2fBCH
Bx1
dx1 � λ2x2fBBH
Bx2
dx1
Agora das igualdades
λ1x1fBBH
Bx2
dx2 � λ1dpx1fBHq � λ1Bx1fBH
Bx1
dx1 � λ1BHBx1f
Bx2
dx2
λ2x2fBCH
Bx1
dx1 � λ2dpx2fCHq � λ2Bx2fCH
Bx2
dx2 � λ2CHBx2f
Bx1
dx1
e fazendo
γ � �λ1dpx1fBHq � λ1BHBx1f
Bx2
dx2 � λ2dpx2fCHq � λ2CHBx2f
Bx1
dx1,
segue do Lema 4.8 que
τ � λ1x1fBCH
Bx1
dx2 � λ1Bx1fBH
Bx1
dx1 � λ2Bx2fCH
Bx2
dx2 � λ2x2fBBH
Bx2
dx1 � γ
� λ1x1fBCH
Bx1
dx2 � λ1x1fBBH
Bx1
dx1 � λ2x2fBCH
Bx2
dx2 � λ2x2fBBH
Bx2
dx1 � γ1
� λ1x1fCBH
Bx1
dx2 � λ1x1fBBH
Bx1
dx1 � λ2x2fCBH
Bx2
dx2 � λ2x2fBBH
Bx2
dx1 � γ
� fCpλ1x1BH
Bx1
� λ2x2BH
Bx2
qdx2 � fBpλ1x1BH
Bx1
� λ2x2BH
Bx2
qdx1 � γ
� fCpδHqdx2 � fBpδHqdx1 � γ
onde
γ1 � γ � λ1BHBx1f
Bx1
dx1 � λ2CHBx2f
Bx2
dx2,
γ � γ1 � λ1x1fHBC
Bx1
dx2 � λ1x1fHBB
Bx1
dx1 � λ2x2fHBC
Bx2
dx2 � λ2x2fHBB
Bx2
dx1,
e δ é o grau de quase-homogeneidade de H.
Portanto LV pθq P A 20 ptH � 0u,R2q.

46 Capítulo 4. O método das restrições algébricas para curvas
Logo a a�rmação segue de 1), 2) e do Lema 4.11.
Do Lema 4.12 segue que podemos de�nir a derivada de Lie de uma restrição algébrica
a � rωstH�0u P rΛ2pR2qstH�0u ao longo de um campo vetorial V P Derlog tH � 0u por
LV paq � rLV pωqstH�0u.
Com esta de�nição temos o seguinte resultado.
Lema 4.13: LgH paq � 0 para qualquer g P Λ0pR2q e para qualquer a P rΛ2pR2qstH�0u.
Demonstração: Seja a � rF px1, x2qdx1 ^ dx2s e θ � LgH pFdx1 ^ dx2q. Temos que
iH pdx1 ^ dx2q � i BHBx2
BBx1
� BHBx1
BBx2
pdx1 ^ dx2q �BH
Bx2
dx2 �BH
Bx1
dx1 � dH.
Isto implica
θ � LgH pFdx1 ^ dx2q � dpigH Fdx1 ^ dx2q � igH pdpFdx1 ^ dx2qq
� dpigH Fdx1 ^ dx2q � dpgF iH pdx1 ^ dx2qq
� dpgFdHq � dpdpgFHq �HdpgF qq
� �dpHdpgF qq
onde HdpgF q P Λ1tH�0upR2q portanto rθstH�0u � 0
Notação: Denotamos por T paq o espaço tangente em a à órbita da restrição algébrica a.
A seguinte proposição é uma consequência dos Lemas 4.11 e 4.13.
Proposição 4.14: Seja a P rΛ2pR2qstH�0u. Então T paq � tLgEpaq, g P Λ0pR2qu.
Demonstração: Provaremos T paq � tLgEpaq, g P Λ0pR2qu. Seja a � rθstH�0u.
Seja ϕt � pϕ1t , ϕ
2t q uma família de simetrias locais de tH � 0u, t P p�1, 1q, tal que
ϕ0 � idR2 . Seja Vt família de campo de vetores associada à família ϕt pBϕr
Br
��r�t
� Vtpϕtqq.
Segue de (1.3) que
d
dtϕ�t θ
����t�0
� ϕ�t pLVtθq��t�0
�dθ
dt
����t�0
� ϕ�0pLV0θq � LV0
θ
e portanto ddtϕ�t a
��t�0
� LV0a.
Suponha que V0 � pf1, f2q, onde f1, f2 P λ0pR2q. Note que para todo x P tH � 0u
temos H � ϕpxq � 0, @t P p�1, 1q, então para cada t P p�1, 1q existe ut P λ0pR2q tais que
H � ϕt � H.ut,

Capítulo 4. O método das restrições algébricas para curvas 47
logod
dtpH � ϕtq
����t�0
� H.dutdt
����t�0
isto é,
H.dutdt
����t�0
�BH
Bx1
dϕ1t
dt�BH
Bx2
dϕ2t
dt
����t�0
�BH
Bx1
f1 � ϕ0 �BH
Bx2
f2 � ϕ0 � V0pHq,
pois Bϕt
Bt
��t�0
� V0pϕ0q � pf1 � ϕ0, f2 � ϕ0q.
Portanto V0 P Derlog tH � 0u e assim pelos Lemas 4.11 e 4.13, T paq � tLgEpaq, g P
Λ0pR2qu.
4.2 Restrições algébricas de curvas quase-homogêneas
Agora calculamos o espaço tangente T paq de forma mais explícita. Isto requer tra-
balhar com restrições algébricas de curvas quase-homogêneas. A possibilidade de de�nir
restrições algébricas de curvas quase-homogêneas segue do seguinte lema.
Notação: Dado F P Λ0pR2q denote por F pδq a parte quase-homogênea de grau δ de sua
série de Taylor com respeito aos pesos λ1, λ2.
Observação 4.15: Seja F P Λ0pR2q, note que se δ R tα1λ1 � α2λ2 {α1, α2 P Nu então
F pδq � 0, pois o grau de quase-homogeneidade é sempre da forma a1λ1�a2λ2, para alguns
a1, a2 P N.
Lema 4.16: Se rFdx1 ^ dx2stH�0u � 0 então rF pdqdx1 ^ dx2stH�0u � 0 para qualquer d.
Demonstração: Seja δ o grau de quase-homogeneidade de H. Note que derivando com
respeito a x1 e x2 a equação (4.1) obtemos que BHBx1
e BHBx2
são polinômios quase-homogêneos
de graus δ � λ1 e δ � λ2 respectivamente.
Agora pelo Lema 4.4 F P p∇Hq, isto implica que existem f1, f2 P Λ0pR2q tais que
F � f1BH
Bx1
� f2BH
Bx2
Note agora que
F pdq � pf1BH
Bx1
qpdq � pf2BH
Bx2
qpdq
e
F ptλ1x1, tλ2x2q � tδ�λ1f1pt
λ1x1, tλ2x2q
BH
Bx1
px1, x2q � tδ�λ2f2ptλ1x1, t
λ2x2qBH
Bx2
px1, x2q
o que implica
F pdq � f1pd�λ1�δq
BH
Bx1
� f2pd�λ2�δq
BH
Bx2

48 Capítulo 4. O método das restrições algébricas para curvas
logo pelo Lema 4.4 rF pdqdx1 ^ dx2stH�0u � 0.
De�nição 4.17: Seja F � F px1, x2q e a � rFdx1 ^ dx2stH�0u. A restrição algébrica
apdq � rF pd�λ1�λ2qdx1 ^ dx2stH�0u
é chamada de parte quase-homogênea de grau d de a. Se a � apdq então a é quase-
homogênea de grau d.
O porque de F pd�λ1�λ2q e não F pdq na de�nição acima é dada pelo seguinte resultado:
Lema 4.18: Se uma restrição algébrica a P rΛ2pR2qstH�0u é quase-homogênea de grau
d0 então LEpaq � d0a.
Demonstração: Seja a � rFdx1 ^ dx2stH�0u. Note que
LEpFdx1 ^ dx2q � dpiEFdx1 ^ dx2q � iEpdpFdx1 ^ dx2qq � dpiEFdx1 ^ dx2q,
que implica
LEpFdx1 ^ dx2q � pλ1x1BF
Bx1
� λ2x2BF
Bx2
qdx1 ^ dx2 � pλ1 � λ2qFdx1 ^ dx2 (4.2)
Agora da hipótese rFdx1 ^ dx2stH�0u � rF pd0�λ1�λ2qdx1 ^ dx2stH�0u e do Lema 4.4
existem g1, g2 P Λ0pR2q tais que
F � F pd0�λ1�λ2q � g1BH
Bx1
� g2BH
Bx2
. (4.3)
Derivando com respeito a x1 e x2 a equação (4.3), depois multiplicando por λ1x1 e
λ2x2 respectivamente e somando estas últimas equações obtemos
λ1x1BF
Bx1
� λ2x2BF
Bx2
� pd0 � λ1 � λ2qFpd0�λ1�λ2q P x∇Hy. (4.4)
Segue das equações (4.2), (4.4) e do Lema 4.4 que
LEpaq � rpd0 � λ1 � λ2qFpd0�λ1�λ2qdx1 ^ dx2stH�0u � pλ1 � λ2qa
� pd0 � λ1 � λ2qa� pλ1 � λ2qa
� d0a.
Lema 4.19: Para qualquer a P rΛ2pR2qstH�0u, a soma¸dPR
apdq é �nita.

Capítulo 4. O método das restrições algébricas para curvas 49
Demonstração: Da Observação 4.15 apdq � 0 se d R tα1λ1 � α2λ2 {α1, α2 P Nu, por-tanto é su�ciente provar que apdq � 0 para d su�cientemente grande.
Seja d ¡ λ1 � λ2 � µpλ1 � λ2q onde µ é a multiplicidade de H então apdq � rFdx1 ^
dx2stH�0u onde F P Λ0pR2q tem µ-jato zero, pois se xα1xβ2 é um monômio de F temos
αλ1�βλ2 � d�λ1�λ2 ¡ µpλ1�λ2q, logo α�β ¡ µ. Consequentemente F P M µ � p∇Hq,portanto pelo Lema 4.4 apdq � 0.
Em vista da Proposição 4.14, vamos calcular a derivada de Lie LgEpaq para quase-
homogêneos g P Λ0pR2q e a P rΛ2pR2qstH�0u.
Lema 4.20: Se a P rΛ2pR2qstH�0u e g P Λ0pR2q são quase-homogêneos de graus δ1, δ2
respectivamente, então LgEpaq � pδ1 � δ2qga.
Demonstração: Temos que para quaisquer ω P Λ2pR2q, g P Λ0pR2q e qualquer campo
vetorial V em R2
LgV pωq � gLV pωq � pLV pgqqω. (4.5)
Então o resultado segue da Equação 4.5 e dos Lemas 4.8 e 4.18.
Os Lemas 4.16 e 4.19, garantem que a seguinte transformação linear está bem de�nida.
De�nição 4.21: Seja Q a transformação linear
Q : rΛ2pR2qstH�0u ÝÑ rΛ2pR2qstH�0u, de�nida por Qpaq �¸δPR
δapδq.
Proposição 4.22: Seja a P rΛ2pR2qstH�0u, considerando xay como um R-espaço vetorial
temos T paq � Qpxayq.
Proposição 4.23: Seja Hpx1, x2q um polinômio quase-homogêneo de multiplicidade �-
nita µ tendo a propriedade dos zeros. Seja a P rΛ2pR2qstH�0u, então considerando xay
como um R-espaço vetorial temos
dimR T paq � dimRxay.
Demonstração: Seja a � rFdx1 ^ dx2stH�0u. Pela Proposição 4.22 temos T paq �
Qpxayq. Assim será su�ciente provar que Q é injetora.
Suponha que°δapδq � 0 logo existe n P N tal que
°ni�1 δia
pδiq � 0, aplicando LE

50 Capítulo 4. O método das restrições algébricas para curvas
pn� 1q-vezes a esta equação obtemos o sistema não singular
$'''&'''%
δ1apδ1q � � � � � δna
pδnq � 0δ2
1apδ1q � � � � � δ2
napδnq � 0
......
......
δn1 apδ1q � � � � � δnna
pδnq � 0
e portanto apδiq � 0 para todo 1 ¤ i ¤ n, logo F δ�λ1�λ2 P x∇Hy para todo δ. Agora pela
Proposição 1.47 M µ2 � x∇Hy e pela Observação 1.45 F � jµ�1F p0q P M µ
2 . Então
F � jµ�1F p0q � g, g P x∇Hy. (4.6)
Pela de�nição de F δ�λ1�λ2 , temos que se for preciso, adicionamos monômios de grau maior
que µ a jµ�1F p0q tais que a equação (4.6) tem a forma
F �¸�nita
F δ�λ1�λ2 � g, g P x∇Hy,
portanto F P x∇Hy e a � 0.
4.3 Ferramentas para a Classi�cação
Para �nalizar o capítulo provaremos duas proposições que são as ferramentas que
serão usadas na classi�cação de rλ2pR2qstH�0u com respeito ao grupo de simetrias locais
de tH � 0u. Usaremos a seguinte notação.
Notação: Denote por �pδq o subespaço de rΛ2pR2qstH�0u que consiste das restrições
algébricas sem termos quase-homogêneos de grau menor ou igual que δ.
Proposição 4.24: Suponha que exista um base a1, ..., aµ de rΛ2pR2qstH�0u que consiste
de restrições algébricas quase-homogêneas de graus δ1 ¤ δ2 ¤ . . . ¤ δµ. Seja a � c1a1 �
� � � � cµaµ. Se as pertence ao espaço a�m g.pc1a1 � � � � � cs�1as�1q � �pδsq para algum
g P Λ0pR2q tal que gp0q � 0, então a é difeomorfa a uma restrição algébrica no espaço
a�m c1a1 � � � � � cs�1as�1 � �pδsq.
Demonstração: Provaremos que uma simetria Ψ da curva tH � 0u que reduz a à forma
normal requerida está contida no �uxo Φt do campo vetorial gE.
Como gp0q � 0 temos pelo Lema de Hadamard que existem f1, f2 P Λ0pR2q tais

Capítulo 4. O método das restrições algébricas para curvas 51
que gpxq � x1f1pxq � x2f2pxq, logo segue da Equação 4.5 que
LgEpaq � LgEpc1a1 � � � � � csas � � � � � cµaµq
P LgEpc1a1 � � � � � cs�1as�1q �LgEpcsasq � �pδsq
P LgEpc1a1 � � � � � cs�1as�1q � cspgLEpasq �LEpgqasq � �pδsq
P LgEpc1a1 � � � � � cs�1as�1q � csgδsas � cspλ1x1Bg
Bx1
� λ2x2Bg
Bx2
qas � �pδsq
P LgEpc1a1 � � � � � cs�1as�1q � �pδsq
Agora da de�nição de LV para restrições algébricas temos
LgEpc1a1 � � � � � cs�1as�1q � digEpc1a1 � � � � � cs�1as�1q � igEdpc1a1 � � � � � cs�1as�1q
� digEpc1a1 � � � � � cs�1as�1q
� diEpg.pc1a1 � � � � � cs�1as�1qq
� diEpg.pc1a1 � � � � � cs�1as�1qq � iEdpg.pc1a1 � � � � � cs�1as�1qq
� LEpg.pc1a1 � � � � � cs�1as�1qq
portanto, da hipótese as P g.pc1a1 � � � � � cs�1as�1q � �pδsq segue que
δsas P LEpg.pc1a1 � � � � � cs�1as�1qq � �pδsq
P LgEpc1a1 � � � � � cs�1as�1q � �pδsq
por conseguinte LgEpaq P δsas � �pδsq, e logo
dpΦtq�a
dtP pΦtq�pδsas � �pδsqq.
Note agora que para qualquer t, o difeomor�smo Φt preserva os eixos x1 e x2 e desde
que gp0q � 0, então Φt tem 1-jato igual a identidade. Estas propriedades implicam que
Φt preserva o espaço a�m δsas � �pδsq e consequentemente dpΦtq�adt
P δsas � �pδsq. Agora
Φ0 � id, segue que pΦtq�a � a � tδsas � �pδsq. Seja t0 � �csδs. Então Φt0 é a simetria
requerida.
Proposição 4.25: Suponha que exista um base a1, ..., aµ de rΛ2pR2qstH�0u que consiste
de restrições algébricas quase-homogêneas de graus δ1 δ2 . . . δµ respectivamente.
Qualquer restrição algébrica da forma a � cpap � � � � � cµaµ com cp � 0 é difeomorfa a
uma restrição algébrica da forma a � cpap � cp�1ap�1 � � � � cµaµ, onde ci � 0 para todo
i ¥ p� 1 tal que ai P xapy.

52 Capítulo 4. O método das restrições algébricas para curvas
Demonstração: Suponha que as � g.ap para algum g P Λ0pR2q e s ¥ p� 1. Então
0 � appqs � pg.apqppq � gp0qap
que implica gp0q � 0 pois ap é linearmente independente. Segue da Proposição 4.24 que
a é difeomorfa a uma restrição algébrica no espaço a�m cpap � ...� cs�1as�1 � �pδsq.
Sejam s1, s2, ..., sl P N tais que asi � gi.ap, si sj se i j e gi P Λ0pR2q, i � 1, . . . , l.
Então a é difeomorfo a uma restrição algébrica do espaço a�m
c1a1 � ...� cs1�1as1�1 � �pδs1q
Repetindo este argumento para s2 obtemos que a é difeomorfo a uma restrição algébrica
do espaço a�m
c1a1 � ...� cs1�1as1�1 � cs1�1as1�1 � ...� cs2�1as2�1 � �pδs2q
Continuando este procedimento obtemos o resultado.

Capítulo
5Classi�cação simplética de curvas
planas quase-homogêneas singulares
Nesta seção consideremos o germe de uma curva plana quase-homogênea singular em
R2n
N � tHpx1, x2q � x¥3 � 0u � R2n (5.1)
onde H P Λ0pR2q satisfaz as seguintes condições:
1. Hp0q � 0, dHp0q � 0.
2. A propriedade dos zeros.
3. O germe H é um polinômio quase-homogêneo de pesos λ1, λ2 e grau d.
Exemplo 5.1: Os clássicos exemplos são os seguintes germes simples de funções
Ak : Hpx1, x2q � xk�11 � x2
2, k ¥ 1;
Dk : Hpx1, x2q � x21x2 � xk�1
2 , k ¥ 4;
E6 : Hpx1, x2q � x31 � x4
2;
E7 : Hpx1, x2q � x31 � x1x
32;
E8 : Hpx1, x2q � x31 � x5
2.
Nesta seção mostramos que o espaço vetorial rΛ2,closedpR2nqsN pode ser identi�cado
com a álgebra local do germe Hpx1, x2q.
53

54 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
5.1 O espaço das restrições algébricas
Teorema 5.2: Seja N � tHpx1, x2q � x¥3 � 0u um germe de curva plana quase-
homogênea, onde H tem multiplicidade �nita µ, e seja tf1, f2, ..., fµu uma base deΛ0pR2qx∇Hy
onde f1p0q � 0, f¥2p0q � 0. Então
1. rΛ2,closedpR2nqsN é um espaço vetorial µ-dimensional gerado pelas restrições algébri-
cas ai � rfidx1 ^ dx2sN , i � 1, ..., µ.
2. Se n ¥ 2 então rSymppR2nqsN � rΛ2,closedpR2nqsN . A variedade rSymppR2qsN con-
siste das restrições algébricas da forma c1a1 � ...� cµaµ, c1 � 0.
Demonstração:
1. Primeiro vejamos que rΛ2,closedpR2nqsN � Rta1, . . . , aµu. Seja rωsN P rΛ2,closedpR2nqsN ,
como N � R2 � t0u2n�2 � M temos rω|TM sN � rfpx1, x2qdx1 ^ dx2sN para algum f P
Λ0pR2q, assim pela Proposição 2.11 rωsN � rfpx1, x2qdx1 ^ dx2sN . Logo pelo fato de
tf1, f2, ..., fµu ser base da álgebra local temos que existem αi, i � 1, . . . , µ, e g1, g2 P
Λ0pR2q tais que
f �µ
i�1
αifi � g1BH
Bx1
� g2BH
Bx2
.
Segue então do Lema 4.4 que rωsN � rfpx1, x2qdx1 ^ dx2sN �°µi�1 αiai. Portanto
rΛ2,closedpR2nqsN � Rta1, a2, ..., aµu.
Agora provemos que ta1, a2, ..., aµu é linearmente independente. Suponha 0 �°µi�1 αiai
para αi P R, i � 0, . . . , µ, então r°µi�1 αifidx1 ^ dx2sN � 0. Segue do Lema 4.4 que°
αifi P x∇Hy, que implica°µi�1 αifi � 0 P Λ0pR2q
x∇Hy , portanto αi � 0, i � 0, . . . , µ, ou seja
ta1, a2, ..., aµu é linearmente independente.
2. Primeiro considere n ¥ 2. Neste caso pela Proposição 3.18 temos que rSymppR2nqsN �
rΛ2,closedpR2nqsN pois N � Rn � t0u.
Agora considere n � 2 e seja ω � fdx1^dx2. Se rωsN P rSymppR2qsN � rΛ2,closedpR2qsN ,
então existem ci P R, i � 1, . . . , µ, tais que
rωsN � r¸
cifidx1 ^ dx2sN ,
logo pelo Lema 4.4 existem g1, g2 P Λ0pR2q tais que
f �¸
cifi � g1BH
Bx1
� g2BH
Bx2
,
isto implica ωp0q � c1f1p0qdx1 ^ dx2 pois dHp0q � 0. Logo como ω é simplética temos
c1f1p0q � 0 que implica c1 � 0.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 55
Reciprocamente, seja rωsN � r°µi�0 cifidx1 ^ dx2sN tal que c1 � 0. Analogamente
temos que ωp0q � c1f1p0qdx1 ^ dx2 isto implica postopω|T0R2q � 2 ¥ 2p2 � 1q, além disso
ω é fechada, então pelo Teorema 1.70 temos que rωsN P rSymppR2qsN .
Observação 5.3: Se H não é quase-homogêneo, então da prova do Lema 4.4 o espaço
rΛ2,closedpR2nqsN pode ser iden�cado com o espaçoΛ0pR2q
x∇H,Hy.
5.2 O índice de isotropia e a multiplicidade simplética
O índice de isotropia e a multiplicidade simplética foram de�nidos no capítulo 3, agora
vejamos como calculá-los.
Notação: Seja P � tx P R2n : x¥3 � 0u � R2n. Dado uma 2-forma ω em R2n denote por
Fω � Fωpx1, x2q o germe tal que o pullback de ω ao plano P tem a forma Fωdx1 ^ dx2
isto signi�ca iP �ω � Fωdx1 ^ dx2, onde iP é inclusão.
Teorema 5.4: Seja N � tHpx1, x2q � x¥3 � 0u um germe de curva plana quase-
homogênea singular no espaço simplético pR2n, ωq. O índice de isotropia de N é o máximo
p P N tal que Fω P x∇Hy � M p, onde M � M2 é o ideal máximal de Λ0pR2q. Se
Fω P x∇Hy então p � 8, se Fωp0q � 0 então p � 0.
Demonstração:
• Fω P x∇Hy implica rω|TP sN � riP�ωsN � rFωdx1 ^ dx2sN � 0 portanto rωsN � 0 e
logo pelo Teorema B, N está contida numa subvariedade Lagrangiana. Então pela
Observação 3.3 o índice de isotropia é in�nito.
• Se Fωp0q � 0, segue da De�nição 3.1.
• Seja p 8 o índice de isotropia de N e p0 o máximo inteiro positivo tal que
Fω P x∇Hy �M p0 .
Seja θ uma 2-forma fechada tal que sua ordem de anulamento é p e tal que rωsN �
rθsN . Então rω|TP sN � rθ|TP sN e logo rpFω � Fθqdx1 ^ dx2sN � 0, assim pelo Lema
4.4 Fω � Fθ P x∇Hy.
Agora segue do fato que Fθ tem pp � 1q-jato zero que Fθ P M p. Portanto Fω P
x∇Hy �M p e p ¤ p0.

56 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
Recíprocamente, se Fω P x∇Hy �M p0 , então
Fω � f1BH
Bx1
� f2BH
Bx2
�¸
gi1,...,ip0
xi1 ...xip0 .
Logo pelo Lema 4.4
rω|TP sN � r¸
gi1,...,ip0
xi1 ...xip0dx1 ^ dx2sN ,
onde g � gpx1, x2, 0, ..., 0q, consequentemente
rωsN � r¸
gi1,...,ip0
xi1 ...xip0 dx1 ^ dx2sN .
Note que°gpi1,...,ip0
qxi1 ...xip0dx1 ^ dx2, é uma 2-forma fechada, portanto pelo Teo-
rema C obtemos p0 ¤ p. Assim p � p0
No que segue, consideremos o índice de isotropia �nito.
Teorema 5.5: Seja N � tHpx1, x2q � x¥3 � 0u um germe de curva plana quase-
homogênea singular no espaço simplético pR2n, ωq. Seja µ a multiplicidade de H.
1. O índice de isotropia de N não excede pµ� 1q a menos que N esteja contida numa
subvariedade Lagrangiana pno último caso, o índice é in�nitoq.
2. A multiplicidade simplética de N não excede µ, e é igual a µ se e somente se N está
contida numa subvariedade Lagrangiana.
Demonstração:
1. Suponha que N não está contida em uma subvariedade Lagrangiana, então pelo
Teorema B, rωsN � 0, logo pela Proposição 2.11 rω|TM sN � 0, para M � R2 � t0u.
O último implica que rFωdx1 ^ dx2sN � riM�ωsN � rω|TM sN � 0, onde iM é a
inclusão, logo pelo Lema 4.4 Fω R x∇Hy.
Por outro lado desde que M µ � x∇Hy, temos Fω R x∇Hy � M µ e pelo Teorema
5.5, o índice não excede µ� 1.
2. Pelo Teorema 3.16, spNq � dimrΛ2,closedpR2nqsN � µ 8 e desde que H é quase-
homogêneo pelo Teorema 5.2 temos que a multiplicidade simplética não excede
µ. Além disso é igual a µ se e somente se N está contido numa subvariedade
Lagrangiana.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 57
Proposição 5.6: Seja Hpx1, x2q um polinômio quase-homogêneo de multiplicidade �-
nita tendo a propriedade dos zeros. A codimensão no espaço rΛ2pR2qstH�0u da órbita da
restrição algébrica a � rF px1, x2qdx1 ^ dx2stH�0u com respeito ao grupo de simetrias da
curva tH � 0u é igual à dimensão deΛ0pR2qx∇H,F y .
Demonstração: De fato, pela Proposição 3.18(1), rΛ2pR2qstH�0u � rΛ2,closedpR2qstH�0u.
Pela demonstração do Teorema 5.2(1), rΛ2,closedpR2qstH�0u é isomoformo ao R-espaço ve-
torial Λ0pR2qx∇Hy , onde o isomor�smo de espaços vetoriais ρ : Λ0pR2q
x∇Hy ÝÑ rΛ2pR2qstH�0u é dado
por ρpfq � rfpx1, x2qdx1^dx2stH�0u. Mais ainda, ρ é um isomor�smo de Λ0pR2q-módulos.
Como ρ�x∇H,F yxHy
� xay, temos que o R-espaço vetorial Λ0pR2q
x∇H,F y é isomorfo ao R-espaço
vetorialrΛ2pR2qstH�0u
xay. Portanto a codimensão de xay é igual a dimR
Λ0pR2qx∇H,F y e logo pela
Proposição 4.23 a codimensão de a em rΛ2pR2qstH�0u é dimRΛ0pR2qx∇H,F y .
O seguinte teorema dá uma forma simples para o cálculo da multiplicidade simplética
de qualquer curva quase-homogênea.
Teorema 5.7: Seja N � tHpx1, x2q � x¥3 � 0u uma curva plana quase-homogênea sin-
gular no espaço simplético pR2n, ωq. A multiplicidade simplética de N é igual à dimensão
deΛ0pR2qx∇H,Fωy
.
Exemplo 5.8: Considere a curva
C � tp21p2 � p3
2 � 0, q1 � p32, q2 � 0u � pR4, ω0 � dp1 ^ dq1 � dp2 ^ dq2q.
Esta é uma curva plana quase-homogênea difeomorfa à curva
D4 � tHpx1, x2q � x21x2 � x3
2 � x¥3 � 0u,
nas coordenadas locais: x1 � p1, x2 � p2, x3 � q1 � p32, x4 � q2, C assume a forma
Hpx1, x2q � x21x2 � x3
2 � x¥3 � 0 e nas mesmas coordenadas a forma ω0 tem a forma
dx1 ^ pdx3 � 3x22dx2q � dx2 ^ dx4.
A restrição desta forma à superfície x3 � x4 � 0 é 3x22dx1 ^ dx2 e o ideal x∇H, 3x2
2y �
xx21, x1x2, x
22y.
Pelo Teorema 5.4 o índice de isotropía de C é 2, pois 3x22 P x∇Hy � M 2 e 3x2
2 R
x∇Hy �M 3.
Pelo Teorema 5.7 a multiplicidade simplética de C é 3 � dimRΛ0pR2q
xx21,x1x2,x22y.

58 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
5.3 Classi�cação simplética A-D-E
Nesta seção damos solução ao Problema A onde N � tHpx1, x2q � x¥3 � 0u e H é
uma das singularidades Ak, Dk, E6, E7, E8 de V. Arnol'd.
O Teorema A e o Teorema 2.12 reduzem o problema A à classi�cação de restrições
algébricas no espaço rΛ2pR2qstH�0u com respeito ao grupo de simetrias locais da curva
tH � 0u � R2.
Esta classi�cação é dada no seguinte teorema.
Hpx1, x2q Fipx1, x2q, i � 0, 1, ..., µ
Ak : xk�11 � x2
2,k ¥ 1
F0 � 1,Fi � xi1, i � 1, ..., k � 1Fk � 0
Dk : x21x2 � xk�1
2 ,k ¥ 4
F0 � 1,Fi � bx1 � xi2, i � 1, ..., k � 4Fk�3 � p�1qkx1 � bxk�3
2 ,Fk�2 � xk�3
2 , Fk�1 � xk�22 , Fk � 0
E6 : x31 � x4
2
F0 � 1, F1 � �x2 � bx1, F2 � bx22 � x1,
F3 � x22 � bx1x2, F4 � �x1x2, F5 � x1x
22, F6 � 0
E7 : x31 � x1x
32
F0 � 1, F1 � x2 � bx1, F2 � �x1 � bx22,
F3 � x22 � bx1x2, F4 � �x1x2 � bx3
2,F5 � x3
2, F6 � x42, F7 � 0
E8 : x31 � x5
2
F0 � �1, F1 � x2 � bx1, F2 � x1 � b1x22 � b2x
32,
F3 � �x22 � bx1x2, F4 � �x1x2 � bx3
2,F5 � x3
2 � bx1x22, F6 � x1x
22, F7 � �x1x
32, F8 � 0
Tabela 5.1:
Teorema 5.9: Seja H � Hpx1, x2q como na Tabela 5.1. Seja Fi � rFidx1 ^ dx2stH�0u,
onde as funções Fi são dadas na linha de H na tabela.
1. Qualquer restrição algébrica a P rΛ2pR2qstH�0u é difeomorfa a uma das formas nor-
mais Fi, i � 0, ..., µ onde µ é a multiplicidade de H.
2. As formas normais F0, ...,Fµ são disjuntas.
3. As formas normais Fi tem codimensão i.
4. Os parâmetros b, b1, b2 nas formas normais são modais, isto é, as restrições algébri-
cas não são equivalentes para diferentes parâmetros.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 59
5.3.1 Demonstração do Teorema 5.9(1)
Para a prova do Teorema 5.9(1) precisamos dos seguintes lemas.
Lema 5.10: Seja a � rxα11 x
α22 dx1 ^ dx2stH�0u e c P R, c � 0, então ca é difeomorfa a
�a. Se a curva tH � 0u admite uma simetria local
px1, x2q Ñ p�x1, x2q ou px1, x2q Ñ px1,�x2q
que não muda o sinal do monômio xα11 x
α22 ou admite uma simetria local
px1, x2q Ñ p�x1,�x2q
que muda o sinal do monômio xα11 x
α22 então as restrições algébricas �a são difeomorfas.
Demonstração:
• Para provar a primeira a�rmação suponha que c ¡ 0, e considere a simetria local
fpx1, x2q � ptλ10 x1, tλ20 x2q da curva tH � 0u, onde t0 ¡ 0 satisfaz tλ1pα1�1q�λ2pα2�1q
0 �
c. Portanto
f�a � rtλ1α10 xα1
1 tλ2α20 xα2
2 ptλ1�λ20 qdx1 ^ dx2stH�0u
� rtλ1pα1�1q�λ2pα2�1q0 xα1
1 xα22 dx1 ^ dx2stH�0u
� ca.
No caso c 0, considere fpx1, x2q � ptλ11 x1, tλ21 x2q onde t1 ¡ 0 satifaz a igualdade
tλ1pα1�1q�λ2pα2�1q1 � �c. Portanto
f�p�aq � r�tλ1α11 xα1
1 tλ2α21 xα2
2 ptλ1�λ21 qdx1 ^ dx2stH�0u
� r�tλ1pα1�1q�λ2pα2�1q1 xα1
1 xα22 dx1 ^ dx2stH�0u
� ca.
• Para a segunda a�rmação suponha que fpx1, x2q � p�x1, x2q (os outros casos são
similares) é uma simetria local da curva que não muda o sinal do monômio xα11 x
α22 .
Assim
f�a � rp�1qα1xα11 x
α22 p�dx1q ^ dx2stH�0u � �rxα1
1 xα22 dx1 ^ dx2stH�0u
� �a.
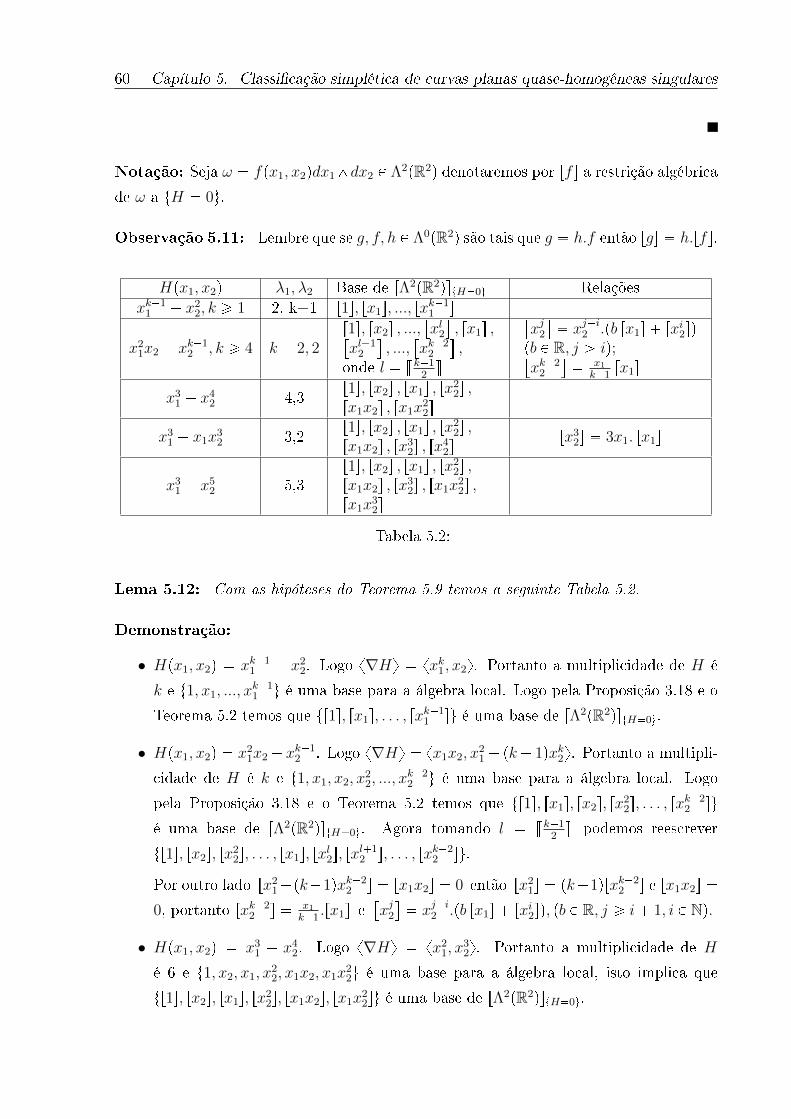
60 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
Notação: Seja ω � fpx1, x2qdx1^dx2 P Λ2pR2q denotaremos por rf s a restrição algébrica
de ω a tH � 0u.
Observação 5.11: Lembre que se g, f, h P Λ0pR2q são tais que g � h.f então rgs � h.rf s.
Hpx1, x2q λ1, λ2 Base de rΛ2pR2qstH�0u Relaçõesxk�1
1 � x22, k ¥ 1 2, k+1 r1s, rx1s, ..., rx
k�11 s
x21x2 � xk�1
2 , k ¥ 4 k � 2, 2r1s, rx2s , ...,
�xl2�, rx1s ,�
xl�12
�, ...,
�xk�2
2
�,
onde l � vk�12w
�xj2�� xj�i2 .pb rx1s � rxi2sq
pb P R, j ¡ iq;�xk�2
2
�� x1
k�1rx1s
x31 � x4
2 4,3r1s, rx2s , rx1s , rx
22s ,
rx1x2s , rx1x22s
x31 � x1x
32 3,2
r1s, rx2s , rx1s , rx22s ,
rx1x2s , rx32s , rx
42s
rx32s � 3x1. rx1s
x31 � x5
2 5,3r1s, rx2s , rx1s , rx
22s ,
rx1x2s , rx32s , rx1x
22s ,
rx1x32s
Tabela 5.2:
Lema 5.12: Com as hipóteses do Teorema 5.9 temos a seguinte Tabela 5.2.
Demonstração:
• Hpx1, x2q � xk�11 � x2
2. Logo x∇Hy � xxk1, x2y. Portanto a multiplicidade de H é
k e t1, x1, ..., xk�11 u é uma base para a álgebra local. Logo pela Proposição 3.18 e o
Teorema 5.2 temos que tr1s, rx1s, . . . , rxk�11 su é uma base de rΛ2pR2qstH�0u.
• Hpx1, x2q � x21x2 � x
k�12 . Logo x∇Hy � xx1x2, x
21 � pk� 1qxk2y. Portanto a multipli-
cidade de H é k e t1, x1, x2, x22, ..., x
k�22 u é uma base para a álgebra local. Logo
pela Proposição 3.18 e o Teorema 5.2 temos que tr1s, rx1s, rx2s, rx22s, . . . , rx
k�22 su
é uma base de rΛ2pR2qstH�0u. Agora tomando l � vk�12w podemos reescrever
tr1s, rx2s, rx22s, . . . , rx1s, rx
l2s, rx
l�12 s, . . . , rxk�2
2 su.
Por outro lado rx21�pk�1qxk�2
2 s � rx1x2s � 0 então rx21s � pk�1qrxk�2
2 s e rx1x2s �
0, portanto rxk�22 s � x1
k�1.rx1s e
�xj2�� xj�i2 .pb rx1s � rxi2sq, pb P R, j ¥ i� 1, i P Nq.
• Hpx1, x2q � x31 � x4
2. Logo x∇Hy � xx21, x
32y. Portanto a multiplicidade de H
é 6 e t1, x2, x1, x22, x1x2, x1x
22u é uma base para a álgebra local, isto implica que
tr1s, rx2s, rx1s, rx22s, rx1x2s, rx1x
22su é uma base de rΛ2pR2qstH�0u.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 61
• Hpx1, x2q � x31 � x1x
32. Logo x∇Hy � x3x2
1 � x32, x1x
22y. Portanto a multiplici-
dade de H é 7 e t1, x2, x1, x22, x1x2, x
32, x
42u é uma base para a álgebra local. Assim
tr1s, rx2s, rx1s, rx22s, rx1x2s, rx
32s, rx
42su é uma base de rΛ2pR2qstH�0u.
Por outro lado r3x21 � x3
2s � 0 então r3x21s � rx3
2s, portanto rx32s � 3x1.rx1s.
• Hpx1, x2q � x31 � x5
2. Logo x∇Hy � xx21, x
42y. Portanto a multiplicidade de H
é 8 e t1, x2, x1, x22, x1x2, x
32, x1x
22, x1x
32u é uma base para a álgebra local. Assim
tr1s, rx2s, rx1s, rx22s, rx1x2s, rx
32s, rx1x
22s, rx1x
32su é uma base de rΛ2pR2qstH�0u.
Notação: Sejam a, b P rΛ2pR2qstH�0u, se a e b são restrições algébricas difeomorfas,
escrevemos a � b.
Observação 5.13: Note que as bases da tabela acima são tomadas tais que satisfazem
as condições das Proposições 4.24 e 4.25. De fato, pela De�nição 4.17:
• Caso Ak, r1s, rx1s, ..., rxk�11 s têm graus k� 3, k� 5, k� 7, ..., k� 3� 2pk� 1q respec-
tivamente pois λ1 � λ2 � k � 3.
• Caso Dk, distinguimos 2 casos:
k ímpar. Isto implica 2l � k�1, logo tr1s, rx2s, rx22s, . . . , rx
l�12 s, rx1s, rx
l2s, ..., rx
k�22 su
têm graus k, k� 2, k� 4, ..., 2k� 3, 2k� 2, 2k� 1, 2k� 1, ..., 3k� 4 respectivamente
pois λ1 � λ2 � k. Logo δ0 � k, δ1 � k � 2, . . . , δl�1 � 2k � 3, δ � 2k � 2, δl �
2k � 1, . . . , δk�2 � 3k � 4.
k par. Isto implica 2l � k�2, logo tr1s, rx2s, rx22s, ..., rx1s, rx
l2s, ..., rx
k�22 su têm graus
k, k � 2, k � 4, ..., 2k � 2, 2k � 2, 2k, ..., 3k � 4 respectivamente. Logo δ0 � k, δ1 �
k � 2, . . . , δl�1 � 2k � 3, δ � 2k � 2, δl � 2k � 2, . . . , δk�2 � 3k � 4.
• tr1s, rx2s, rx1s, rx22s, rx1x2s, rx1x
22su têm graus 7, 10, 11, 13, 14, 17 respectivamente pois
λ1 � λ2 � 7.
• tr1s, rx2s, rx1s, rx22s, rx1x2s, rx
32s, rx
42su têm graus 5, 7, 8, 9, 10, 11, 13 respectivamente
pois λ1 � λ2 � 5.
• tr1s, rx2s, rx1s, rx22s, rx1x2s, rx
32s, rx1x
22s, rx1x
32su têm graus 8, 11, 13, 14, 16, 17, 19, 22 res-
pectivamente pois λ1 � λ2 � 8.
Agora vejamos a demonstração do Teorema 5.9(1).
Demonstração: do Teorema 5.9(1)

62 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
• Ak: seja a P rΛ2pR2qstH�0u, então pelo Lema 5.12
a �k�1
i�0
cirxi1s.
Consideremos os seguintes casos:
� c0 � 0.
Como rxi1s � xi1.r1s @i ¡ 0, pela Proposição 4.25 a � c0r1s. Agora como
px1, x2q Ñ px1,�x2q é uma simetria local de tH � 0u que não muda o sinal de
1, pelo Lema 5.10 c0r1s � r1s. Portanto a � r1s.
� c0 � c1 � ... � ci�1 � 0, ci � 0, 1 ¤ i ¤ k � 1.
Como rxj1s � xj�i1 .rxi1s @j ¡ i, pela Proposição 4.25 a � cirxi1s. Agora como
px1, x2q Ñ px1,�x2q é uma simetria local de tH � 0u que não muda o sinal
de xi1, pelo Lema 5.10 cirxi1s � rxi1s. Portanto a � rxi1s.
� c0 � c1 � ... � ck�1 � 0.
Portanto a � 0.
• Dk: seja a P rΛ2pR2qstH�0u, então pelo Lema 5.12
a �k�2
i�0
cirxi2s � crx1s.
Distinguimos 2 casos:
k ímpar: note que neste caso ainda podemos usar a Proposição 4.25.
� c0 � 0.
Pela Proposição (4.25) a � c0r1s. Agora como px1, x2q Ñ p�x1, x2q é uma
simetria local de tH � 0u que não muda o sinal de 1, pelo Lema 5.10
c0r1s � r1s. Portanto a � r1s.
� c0 � c1 � ... � ci�1 � 0, ci � 0, 1 ¤ i ¤ l � 1.
Pela Proposição 4.25 a � cirxi2s � crx1s. Agora como px1, x2q Ñ p�x1, x2q é
uma simetria local de tH � 0u que não muda o sinal de xi2, pelo Lema 5.10
cirxi2s � crx1s � rxi2s � brx1s. Portanto a � rxi2 � bx1s.
� c0 � ... � cl�1 � 0, c � 0
Aqui temos os subcasos
∗ cl � ... � ci�1 � 0, ci � 0, l ¤ i ¤ k � 4.
Usando repetidamente a igualdade rxj2s �x2cipcrx1s� cirx
i2sq, j ¡ i obtemos

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 63
j � i� 1, a � crx1s � cirxi2s � βi�1 , βi�1 P �pδi�1q
j � i� 2, crx1s � cirxi2s � βi�1 � crx1s � cirx
i2s � βi�2 , βi�2 P �pδi�2q
...
j � k � 3, crx1s � cirxi2s � βk�4 � crx1s � cirx
i2s � βk�3 , βk�3 P �pδk�3q
j � k � 2, crx1s � cirxi2s � βk�3 � crx1s � cirx
i2s � βk�2 , βk�2 P �pδk�2q
como �pδk�2q � 0 segue que a � crx1s � cirxi2s.
Agora como px1, x2q Ñ p�x1, x2q é uma simetria local de tH � 0u que não
muda o sinal de xi2, crx1s � cirxi2s � rxi2s � brx1s. Portanto a � rxi2 � bx1s
∗ cl � ... � ck�4 � 0, ck�3 � 0.
Pela igualdade rxk�22 s � x1
k�1rx1s obtemos a � crx1s � ˜ck�3rx
k�32 s, logo pelo
Lema 5.10 crx1s � ˜ck�3rxk�32 s � �rx1s � brxk�3
2 s. Portanto a � r�x1 �
bxk�32 s � rp�qkx1 � bxk�3
2 s
∗ cl � ... � ck�3 � 0, ck�2 � 0.
Pela igualdade rxk�22 s � x1
k�1rx1s a � crx1s, logo pelo Lema 5.10, crx1s �
�rx1s. Portanto a � �rx1s.
∗ cl � ... � ck�2 � 0.
Então a � �rx1s.
� c0 � ... � ci�1 � c � 0, ci � 0, l ¤ i ¤ k � 2.
Pela Proposição 4.25 a � cirxi2s. Agora como px1, x2q Ñ p�x1, x2q é uma
simetria local de tH � 0u que não muda o sinal de xi2, cirxi2s � rxi2s. Portanto
a � rxi2s.
� c0 � ... � ck�2 � c � 0.
Portanto a � 0.
k par:
� c0 � 0.
Usando as igualdades rxi2s �xi2c0.pc0r1sq, i � 1, . . . , k � 2 e aplicando repetida-
mente a Proposição 4.24 obtemos

64 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
i � 1, a � c0r1s � β1 , β1 P �pδ1q
i � 2, c0r1s � β1 � c0r1s � β2 , β2 P �pδ2q
...
i � l � 1, c0r1s � βl�2 � c0r1s � βl�1 , βl�1 P �pδl�1q
rx1s � x1.r1s, c0r1s � βl�1 � c0r1s � β , β P �pδq
i � l, c0r1s � β � c0r1s � βl , βl P �pδlq
...
i � k � 2, c0r1s � βk�3 � c0r1s � βk�2 , βk�2 P �pδk�2q
Como �pδk�2q � 0 temos a � cr1s. Já que px1, x2q Ñ p�x1, x2q é uma simetria
local de tH � 0u que não muda o sinal de 1, c0r1s � r1s. Portanto a � r1s.
� c0 � c1 � ... � ci�1 � 0, ci � 0, 1 ¤ i ¤ l � 1.
Usando a igualdade rxj2s � xj�i2 .rxi2s, j ¡ i como no item anterior para j �
i� 1, i� 2, . . . , l � 1, temos
a � cirxis � βi�1 � cirxis � βi�2 � . . . � cirxis � βl�1
De βl�1 P �pδl�1q temos que existem c, cj P R, j � l, . . . , k � 2 tais que
βl�1 � clrxl2s � crx1s �
k�2
j�l�1
cjrxj2s
Agora usando rxj2s �xj�i2
cipbrx1s�cirx
i2sq, b P R, j ¥ i�1 para j � l, l�1, . . . , k�
2, temos
cirxis � βl�1 � cirxis � crx1s � βl � cirxis � crx1s � βl�1 � ... � cirxi2s � crx1s
Como px1, x2q Ñ p�x1, x2q é uma simetria local de tH � 0u que não muda o
sinal de xi2, cirxi2s � crx1s � rxi2s � brx1s. Portanto a � rxi2 � bx1s.
� c0 � ... � cl�1 � 0, c � 0.
Aqui temos os subcasos:
∗ cl � ... � ci�1 � 0, ci � 0, l ¤ i ¤ k � 4.
Usando repetidamente a igualdade rxj2s �xj�i2
cipcrx1s � cirx
i2sq, j ¥ i � 1
para j � i� 1, i� 2, . . . , j � k � 2, obtemos
a � crx1s � cirxi2s � βi�1 � crx1s � cirx
i2s � βi�2 �
� ... � crx1s � cirxi2s � βk�3 � crx1s � cirx
i2s

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 65
Analogamente ao item anterior, crx1s � cirxi2s � rxi2s � brx1s. Portanto
a � rxi2 � bx1s.
∗ cl � ... � ck�4 � 0, ck�3 � 0.
Pela igualdade rxk�22 s � x2
ck�3pcrx1s � ck�3rx
k�32 sq, a � crx1s � ck�3rx
k�32 s.
Por outro lado, como k é par px1, x2q Ñ px1,�x2q é uma simetria local
de tH � 0u que não muda o sinal de x1, então crx1s � ck�3rxk�32 s �
rx1s � brxk�32 s. Portanto a � rx1 � bxk�3
2 s.
∗ cl � ... � ck�3 � 0, ck�2 � 0.
Pela igualdade rxk�22 s � x1
k�1rx1s, a � crx1s e analogamente ao item anterior
temos crx1s � rx1s. Portanto a � rx1s.
∗ cl � ... � ck�2 � 0.
De forma análoga temos a � rx1s.
� c0 � ... � ci�1 � c � 0, ci � 0, l ¤ i ¤ k � 2.
Da igualdade rxj2s �xj�i2
circix
i2s, j ¥ i� 1 obtemos a � cirx
i2s. Como px1, x2q Ñ
p�x1, x2q é uma simetria local de tH � 0u que não muda o sinal de xi2,
cirxi2s � rxi2s. Portanto a � rxi2s.
� c0 � ... � ck�2 � c � 0.
Portanto a � 0.
Logo obtemos a tabela seguinte
c0 � 0 F0 : r1sc0 � . . . � ci�1 � 0, ci � 0, i ¤ k � 4 Fi : rbx1 � xi2s
c0 � . . . � ck�4 � 0, c � 0 Fk�3 : rp�qkx1 � bxk�32 s
c0 � . . . � ck�4 � c � 0, ck�3 � 0 Fk�2 : rxk�32 s
c0 � . . . � ck�3 � c � 0, ck�2 � 0 Fk�1 : rxk�22 s
c0 � . . . � ck�2 � c � 0 Fk : r0s
Agora já que a prova para os casos E6, E7 e E8 é similar ao caso Ak e Dk para k par,
somente mencionaremos os fatos que implicam estes resultados.
• E6: seja a P rΛ2pR2qstH�0u, então pelo Lema 5.12
a � c0r1s � c1rx2s � c2rx1s � c3rx22s � c4rx1x2s � c5rx1x
22s
Pela Proposição 4.25 e como px1, x2q Ñ px1,�x2q é uma simetria local de tH � 0u
que não muda o sinal de 1, x1, x22, x1x
22, do Lema 5.10 temos respectivamente que
� c0 � 0. Então a � r1s.

66 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
� c0 � c1 � 0, c2 � 0. Então a � rx1 � bx22s.
� c0 � c1 � c2 � 0, c3 � 0. Então a � rx22 � bx1x2s.
� c0 � c1 � c2 � c3 � c4 � 0, c5 � 0. Então a � rx1x22s.
Agora pela Proposição 4.25 e da primeira parte do Lema 5.10 temos
� c0 � 0, c1 � 0. Então a � r�x2 � bx1s.
� c0 � c1 � c2 � c3 � 0, c4 � 0. Então a � r�x1x2s.
� c0 � c1 � c2 � c3 � c4 � c5 � 0. Então a � 0.
• E7: seja a P rΛ2pR2qstH�0u, então pelo Lema 5.12
a � c0r1s � c1rx2s � c2rx1s � c3rx22s � c4rx1x2s � c5rx
32s � c6rx
42s
Pela Proposição 4.25 e como px1, x2q Ñ p�x1, x2q é uma simetria local de tH � 0u
que não muda o sinal de 1, x2, x22, x
32, x
42, do Lema 5.10 temos respectivamente que
� c0 � 0. Então a � r1s.
� c0 � 0, c1 � 0. Então a � rx2 � bx1s.
� c0 � c1 � c2 � 0, c3 � 0. Então a � rx22 � bx1x2s.
� c0 � c1 � c2 � c3 � c4 � 0, c5 � 0. Então a � rx32s.
� c0 � c1 � c2 � c3 � c4 � c5 � 0, c6 � 0. Então a � rx32s.
Agora pela Proposição 4.25 e da primeira parte do Lema 5.10 temos
� c0 � c1 � 0, c2 � 0. Então a � r�x1 � bx22s.
� c0 � c1 � c2 � c3 � 0, c4 � 0. Então a � r�x1x2 � bx32s.
� c0 � c1 � c2 � c3 � c4 � c5 � c6 � 0. Então a � 0.
• E8: seja a P rΛ2pR2qstH�0u, então pelo Lema 5.12
a � c0r1s � c1rx2s � c2rx1s � c3rx22s � c4rx1x2s � c5rx
32s � c6rx1x
22s � c7rx1x
32s
Pela Proposição 4.25 e como px1, x2q Ñ p�x1,�x2q é uma simetria local de tH � 0u
que muda o sinal de x2, x1, x32, x1x
22, do Lema 5.10 temos respectivamente que
� c0 � 0, c1 � 0. Então a � rx2 � bx1s.
� c0 � c1 � 0, c2 � 0. Então a � rx1 � bx22 � b1x
32s.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 67
� c0 � c1 � c2 � c3 � c4 � 0, c5 � 0. Então a � rx32 � bx1x
22s.
� c0 � c1 � c2 � c3 � c4 � c5 � 0, c6 � 0. Então a � rx1x22s.
Agora pela Proposição 4.25 e da primeira parte do Lema 5.10 temos
� c0 � 0. Então a � r�1s.
� c0 � c1 � c2 � 0, c3 � 0. Então a � r�x22 � bx1x2s.
� c0 � c1 � c2 � c3 � 0, c4 � 0. Então a � r�x1x2 � bx32s.
� c0 � c1 � c2 � c3 � c4 � c5 � c6 � 0, c7 � 0. Então a � �rx1x32s.
� c0 � c1 � c2 � c3 � c4 � c5 � c6 � c7 � 0. Então a � 0.
5.3.2 Demonstração do Teorema 5.9(2)
Antes de começar a demostração, vamos transferir as formas normais Fi a formas
simpléticas seguindo o algoritmo obtido na demonstração da Proposição 2.18.
Fixe qualquer forma simplética, por exemplo ω0 � dp1 ^ dq1 � � � � � dpn ^ dqn.
Se n ¥ 2 então a restrição algébrica rFipx1, x2qdx1 ^ dx2sN pode ser realizada pela
forma simplética
ωi � Fidx1 ^ dx2 � dx1 ^ dx3 � dx2 ^ dx4 � dx5 ^ dx6 � � � � � dx2n�1 ^ dx2n,
a qual pode ser levada a ω0 pela mudança de coordenadas
x1 � p1, x2 � p2, x3 � q1 �
» p2
0
Fipp1, tqdt, x4 � q2,
x5 � p3, x6 � q3, � � � x2n�1 � pn, x2n � qn.
Esta mudança de coordenadas envia o conjundo em (5.1)
N � tHpx1, x2q � x¥3 � 0u,
no conjunto
N i � tHpp1, p2q � q1 �
» p2
0
Fipp1, tqdt � q¥2 � p¥3 � 0u � pR2n, ω0q. (5.2)
O anterior mostra que rFipx1, x2qdx1 ^ dx2sN é difeomorfa a rω0sN i para todo i �
0, 1, . . . , µ. Então se rFipx1, x2qdx1 ^ dx2sN e rFjpx1, x2qdx1 ^ dx2sN são difeomorfas para
i � j logo rω0sN i é difeomorfa a rω0sNj e pelo Teorema A (2) N i e N j são simplectomorfos.
Portanto para provar que as formas normais são disjuntas é su�ciente distinguir a
multiplicidade simplética e o índice de isotropia dos conjuntos dados em (5.2). Assim
temos o seguinte lema.

68 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
Lema 5.14: Para os conjuntos N i como em (5.2) o índice de isotropia e a multiplicidade
simplética, estão dados na seguinte tabela
Forma
normal
Ind. de
iso.
Mult.
Sim.
Aik0 ¤ i ¤ k � 1
i i
Akk 8 k
D0k 0 0
D1k 1 2
Dik
2 ¤ i ¤ k � 4b � 0 : 1b � 0 : i
i� 1
Dk�3k 1 k-2
Dk�2k k-3 k-2
Dk�1k k-2 k-1
Dkk 8 k
E06 0 0
E16 1 2
E26 1 3
E36 2 4
E46 2 4
E56 3 5
E66 8 6
Forma
normal
Ind. de
iso.
Mult.
Sim.
E07 0 0
E17 1 2
E27 1 3
E37 2 4
E47 2 5
E57 3 5
E67 4 6
E67 8 7
E08 0 0
E18 1 2
E28 1 4
E38 2 4
E48 2 5
E58 3 6
E68 3 6
E78 4 7
E88 8 8
Demonstração: Para provar o Lema usaremos os Teoremas 5.4 e 5.7 em cada caso.
Denotaremos por I o índice de isotropía e m a multiplicadade simplética. Em cada caso
teremos
ω � ωi � Fidx1 ^ dx2 � dx1 ^ dx3 � dx2 ^ dx4 � dx5 ^ dx6 � � � � � dx2n�1 ^ dx2n
Portanto Fω � Fi.
1. Ak � xk�11 � x2
2 e x∇Hy � xxk1, x2y.
• i � 0.
Assim Fω � F0 � 1, e pelo Teorema 5.4, I � 0. Agora como x∇H,F0y �
Λ0pR2q, pelo Teorema 5.7 m � 0.
• 1 ¤ i ¤ k � 1.
A�rmação: I � i
Note que Fi P x∇Hy�M i, logo somente temos que provar Fi R x∇Hy�M i�1.
Suponha que Fi P x∇Hy�M i�1 então existem f, g, hj P Λ0pR2q, j � 0, . . . , i�1

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 69
tais que
xi1 � fpx1, x2qxk1 � gpx1, x2qx2 �
i�1
j�0
hjxj1x
i�1�j2 ,
comparando o i-jato na origem, temos xi1 � x2 ji�1pgqp0q, que é absurdo.
Portanto Fi R x∇Hy �M i�1 e I � i.
Ainda, pelo Teorema 5.7
m � dimΛ0pR2q
x∇H,Fωy� dim
Λ0pR2q
xxk1, x2, xi1y� dim
Λ0pR2q
xx2, xi1y� i.
• i � k.
Assim Fω � Fk � 0 P x∇Hy então pelo Teorema 5.4, I é in�nito. Por outro
lado, segue do Teorema 5.7 que m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2q
xxk1 ,x2y� k.
2. Dk � x21x2 � xk�1
2 e x∇Hy � xx1x2, x21 � pk � 1qxk�2
2 y.
Prosseguindo de modo análogo ao caso Ak temos
• i � 0.
Como Fω � F0 � 1 , I � 0 e m � 0.
• i � 1.
De F1 � bx1 � x2 segue que F1 P x∇Hy �M e F1 R x∇Hy �M 2, portanto
I � 1.
Ainda,
m � dimΛ0pR2q
x∇H,Fωy� dim
Λ0pR2q
xx1x2, x21 � pk � 1qxk�2
2 , bx1 � x2y� 2.
• 2 ¤ i ¤ k � 4.
Temos Fi � bx1 � xi2. Para achar I, consideramos os casos.
(a) b � 0.
Como Fi � xi2 P M i � x∇Hy �M i e Fi R x∇Hy �M i�1 temos I � i.
(b) b � 0.
Como Fi � bx1 � xi2 P M � x∇Hy � M e Fi R x∇Hy � M 2 segue que
I � 1.
Além disso,
m � dimΛ0pR2q
x∇H,Fωy� dim
Λ0pR2q
xx1x2, x21 � pk � 1qxk�2
2 , bx1 � xi2y� i� 1.

70 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
• i � k � 3.
De Fk�3 � p�qkx1 � bxk�32 P M � x∇Hy � M e Fk�3 R x∇Hy � M 2 segue
que I � 1.
Temos que
m � dimΛ0pR2q
x∇H,Fωy� dim
Λ0pR2q
xx1x2, x21 � pk � 1qxk�2
2 , p�qkx1 � bxk�32 y
� k � 2.
• i � k � 2.
Temos Fk�2 � xk�32 P M k�3 � x∇Hy � M k�3 e como Fk�2 R x∇Hy � M k�2
implica I � k � 3.
Além disso,
m � dimΛ0pR2q
x∇H,Fωy� dim
Λ0pR2q
xx1x2, x21 � pk � 1qxk�2
2 , xk�32 y
� k � 2.
• i � k � 1.
De Fk�1 � xk�22 P M k�2 � x∇Hy � M k�2 e Fk�1 R x∇Hy � M k�1 segue
I � k � 2.
Ainda,
m � dimΛ0pR2q
x∇H,Fωy� dim
Λ0pR2q
xx1x2, x21 � pk � 1qxk�2
2 , xk�22 y
� k � 1.
• i � k.
Temos Fk�1 � 0 P x∇Hy então I é in�nito. Além disso
m � dimΛ0pR2q
x∇H,Fωy� dim
Λ0pR2q
xx1x2, x21 � pk � 1qxk�2
2 y� k.
Como nos casos E6, E7 e E8 os calculos de I e m são análogos aos casos Ak e Dk
somente faremos aqueles que são um pouco mais trabalhosos.
3. E6 � x31 � x4
2 e x∇Hy � xx21, x
32y.
• i � 0, F0 � 1.
Então I � 0 e m � 0.
• i � 1, F1 � �x2 � bx1.
Como F1 P x∇Hy � M e F1 R x∇Hy � M 2 segue I � 1. Além disso m �
dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
32,�x2�bx1y
� 2.
• i � 2, F2 � x1 � bx22.
F2 P x∇Hy � M e F2 R x∇Hy � M 2 então I � 1. Além disso m �
dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
32,x1�bx
22y� 3.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 71
• i � 3, F3 � x22 � bx1x2.
Temos que I � 2 pois F3 P M 2 � x∇Hy �M 2 e F3 R x∇Hy �M 3, além disso
m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
32,x
22�bx1x2y
� 4.
• i � 4, F4 � �x1x2.
I � 2 pois F4 P x∇Hy�M 2 e F4 R x∇Hy�M 3, além disso m � dim Λ0pR2qx∇H,Fωy
�
dim Λ0pR2qxx21,x
32,�x1x2y
� 4.
• i � 5, F5 � x1x22.
Temos F5 P x∇Hy � M 3. Suponha que F5 P x∇Hy � M 4, logo existem
f, g, hj P Λ0pR2q, j � 0, . . . , 4 tais que
x1x22 � fx2
1 � gx32 �
4
j�0
hjxj1x
4�j2 ,
comparando o 2-jato na origem, temos 0 � fp0qx21 isto implica fp0q � 0 e
pelo Lema de Hadamard f � x1f1 � x2f2, portanto
x1x22 � f1x
31 � f2x
21x2 � gx3
2 �4
j�0
hjxj1x
4�j2 ,
agora comparando o 3-jato na origem
x1x22 � f1p0qx
31 � f2p0qx
21x2 � gp0qx3
2
que é absurdo. Portanto F5 R x∇Hy �M 4 e I � 3.
Ainda mais, m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
32,x1x
22y� 5.
• i � 6, F6 � 0.
Então I é in�nito e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
32y� 6.
4. E7 � x31 � x1x
32 e x∇Hy � x3x2
1 � x32, x1x
22y.
• i � 0, F0 � 1.
Então I � 0 e m � 0.
• i � 1, F1 � x2 � bx1.
I � 1, pois F1 R x∇Hy �M 2 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qx3x21�x
32,x1x
22,x2�bx1y
� 2.
• i � 2, F2 � �x1 � bx22.
I � 1, pois F2 R x∇Hy�M 2 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qx3x21�x
32,x1x
22,�x1�bx
22y� 3.
• i � 3, F3 � x22 � bx1x2.
I � 2, pois F3 R x∇Hy�M 3 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qx3x21�x
32,x1x
22,x
22�bx1x2y
� 4.

72 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
• i � 4, F4 � �x1x2 � bx32.
I � 2 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qx3x21�x
32,x1x
22,�x1x2�bx
32y� 5.
• i � 5, F5 � x32.
Temos F5 P x∇Hy�M 3 e usando o Lema de Hadamard como no item E6, i � 5
obtemos F5 R x∇Hy �M 4, então I � 3.
Além disso, m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qx3x21�x
32,x1x
22,x
32y� 5.
• i � 6, F6 � x42.
Temos F6 P M 4 � x∇Hy �M 4. Suponha que F6 P x∇Hy �M 5, logo existem
f, g, hj P Λ0pR2q, j � 0, . . . , 5 tais que
x42 � 3fx2
1 � fx32 � gx1x
22 �
5
j�0
hjxj1x
5�j2 ,
comparando o 2-jato na origem, temos 0 � 3fp0qx21, isto implica fp0q � 0
e pelo Lema de Hadamard f � x1f1 � x2f2, portanto
x42 � 3f1x
31 � 3f2x
21x2 � f1x
32x1 � f2x
42 � gx1x
22 �
5
j�0
hjxj1x
5�j2 ,
agora comparando o 3-jato na origem 0 � 3f1p0qx31 � 3f2p0qx
21x2 � gp0qx1x
22
isto implica f1p0q � f2p0q � gp0q � 0, assim pelo Lema de Hadamard
fi � x1pi1 � x2pi2, g � x1g1 � x2g2, i � 1, 2
e então
x42 � 3f11x
41 � 3f12x
31x2 � 3f21x
31x2 � 3f22x
21x
22 � f11x
32x
21�
� f12x42x1 � f21x
42x1 � f22x
52 � g1x
21x
22 � g1x1x
32 �
5
j�0
hjxj1x
5�j2 .
Comparando o 4-jato temos x42 � 3f11p0qx
41�p3f12p0q�3f21p0qqx
31x2�3f22p0qx
21x
22
que é absurdo, portanto F6 R x∇Hy �M 5 e I � 4.
Além disso, m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qx3x21�x
32,x1x
22,x
42y� 6.
• i � 7, F7 � 0.
Então I é in�nito e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qx3x21�x
32,x1x
22y� 7.
5. E8 � x31 � x5
2 e x∇Hy � xx21, x
42y.
• i � 0, F0 � �1.
Então I � 0 e m � 0 .

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 73
• i � 1, F1 � x2 � bx1.
I � 1, pois F1 R x∇Hy �M 2 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42,x2�bx1y
� 2.
• i � 2, F2 � x1 � b1x22 � b2x
32.
I � 1, pois F2 R x∇Hy �M 2 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42,x1�b1x
22�b2x
32y� 4.
• i � 3, F3 � �x22 � bx1x2.
I � 2, pois F3 R x∇Hy �M 3 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42,�x
22�bx1x2y
� 4.
• i � 4, F4 � �x1x2 � bx32.
I � 2, pois F4 R x∇Hy �M 3 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42,�x1x2�bx
32y� 5.
• i � 5, F5 � x32 � bx1x
22.
I � 3, pois F5 R x∇Hy �M 4 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42,x
32�bx1x
22y� 6.
• i � 6, F6 � x1x22.
I � 3 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42,x1x
22y� 6.
• i � 7, F7 � �x1x32.
I � 4 e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42,�x1x
32y� 7.
• i � 8, F8 � 0.
Então I é in�nito e m � dim Λ0pR2qx∇H,Fωy
� dim Λ0pR2qxx21,x
42y� 8.
Agora como a multiplicidades simplética e o índice de isotropia são invariantes simplé-
ticos, temos do lema anterior que as órbitas das formas normais Fi são disjuntas, exceto
para os casos
pαq rpx22 � bx1x2qdx1 ^ dx2stH�0u e r�x1x2dx1 ^ dx2stH�0u, H � x3
1 � x42 pE6q;
pβq rpx32 � bx1x
22qdx1 ^ dx2stH�0u e rx1x
22dx1 ^ dx2stH�0u, H � x3
1 � x52 pE8q.
Para distinguir estes casos usaremos o seguinte Lema.
Lema 5.15: Seja a � rF px1, x2qdx1^dx2sN , onde H é um polinômio quase-homogêneo.
O ideal x∇H,F y � Λ0pR2q é chamado de ideal associado de a. Considere as restrições
a, a P rΛ2pR2nqsN então se a, a são difeomorfas, os seus ideais associados são isomorfos.
Demonstração: Lembramos que da Proposição 1.49, dado f : pR2, 0q Ñ pR2, 0q germe
de difeomor�smo induz o isomor�smo f� : Λ0pR2q ÝÑ Λ0pR2q.
Considere a � rF px1, x2qdx1 ^ dx2sN e a � rF px1, x2qdx1 ^ dx2sN difeomorfas. Seja
M0 � R2 � t0u2n�2, então o germe de difeomor�smo ρ : pR2, 0q ÝÑ pM0, 0q dado por

74 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
ρpx1, x2q � px1, x2, 0, . . . , 0q torna rFdx1 ^ dx2stH�0u e rF dx1 ^ dx2stH�0u difeomorfas,
logo existe φ um germe de difeomor�smo de pR2, 0q tal que
φ�prFdx1 ^ dx2stH�0uq � rF dx1 ^ dx2stH�0u, φptH � 0uq � tH � 0u (5.3)
Provaremos que φ�px∇H,F yq � x∇H, F y, onde φ� é o isomor�smo induzido. De (5.3) e
do Lema 4.4 obtemos
F � F � φ.
�Bφ1
Bx1
Bφ2
Bx2
�Bφ1
Bx2
Bφ2
Bx1
P x∇Hy
então,
F � φ.
�Bφ1
Bx1
Bφ2
Bx2
�Bφ1
Bx2
Bφ2
Bx1
P x∇H, F y
e como Bφ1Bx1
Bφ2Bx2
� Bφ1Bx2
Bφ2Bx1
é invertível
φ�pF q � F � φ P x∇H, F y.
Por outro lado, pela propriedade dos zeros de H temos que existe uma função f tal que
H � φ � Hf
derivando com respeito a xi, temos
2
j�1
BH
Bxjpφq.
BφjBxi
�BH
Bxif �H
Bf
Bxi
assim obtemos o sistema
�BHBx1pφq BH
Bx2pφq
�� Bφ1Bx1
Bφ1Bx2
Bφ2Bx1
Bφ2Bx2
�� H
�BfBx1
BfBx2
� f
�BHBx1
BHBx2
�.
O que implica queBH
Bxi� φ P xH,∇Hy � x∇Hy.
Esta última igualdade segue do fato de H ser polinômio quase-homogêneo.
Portanto temos que
φ�px∇H,F yq � x∇H, F y.
Agora de (5.3) segue
rFdx1 ^ dx2stH�0u � φ�1�prF dx1 ^ dx2stH�0uq, φ�1ptH � 0uq � tH � 0u
portanto de forma análoga podemos mostrar
φ��1px∇H, F yq � x∇H,F y

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 75
que implica
x∇H, F y � φ�px∇H,F yq.
Logo φ�px∇H,F yq � x∇H, F y
Provemos que as classes de pαq e pβq não são as mesmas.
Caso pαq. Suponha que as restrições são difeomorfas, então existe φ � pφ1, φ2q germe
de difeomor�smo de pR2, 0q que leva r�x1x2dx1^dx2stH�0u em rpx22�bx1x2qdx1^dx2stH�0u
e preserva tH � 0u. Pelo Lema de Hadamard aplicado a φ1, φ2 existem a1, a2, b1, b2 P
Λ0pR2q tais que φ1 � x1a1 � x2a2 e φ2 � x1b1 � x2b2.
Por outro lado, pelo Lema 5.15, φ� leva xx21, x
32, x1x2y em xx2
1, x32, x
22 � bx1x2y, isto
quer dizer
xx21pφq, x
32pφq, x1x2pφqy � xφ2
1, φ32, φ1φ2y � xx2
1, x32, x
22 � bx1x2y,
logo existem f1, f2, f3, g1, g2, g3 P Λ0pR2q tais que
x21 � f1φ
21 � f2φ
32 � f3φ1φ2,
x22 � bx1x2 � g1φ
21 � g2φ
32 � g3φ1φ2,
comparando os 2-jatos nas equações acima, podemos supor fi, gi, aj, bj P R, i � 1, 2, 3, j �
1, 2 (somente para evitar a notação f1p0q) e obtemos
x21 � f1pa1x1 � a2x2q
2 � f3pa1x1 � a2x2qpb1x1 � b2x2q,
x22 � bx1x2 � g1pa1x1 � a2x2q
2 � g3pa1x1 � a2x2qpb1x1 � b2x2q,
logo temos o sistema $''''''&''''''%
a21f1 � a1b1f3 � 1,
2f1a1a2 � f3pa1b2 � a2b1q � 0,a2
2f1 � f3a2b2 � 0,a2
1g1 � a1b1g3 � 0,2g1a1a2 � g3pa1b2 � a2b1q � b,
a22g1 � g3a2b2 � 1,
também do fato de φ ser germe de difeomor�smo temos que a1b2 � b1a2 � 0, além disso
da primeira e última linha obtemos a1 � 0, a2 � 0, logo a2f1 � f3b2 � 0 e portanto
0 � 2f1a1a2 � f3pa1b2 � a2b1q
� �a1f3b2 � f3a2b1
� f3pa2b1 � a1b2q.
Que implica f3 � 0, logo

76 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
"a2
1f1 � 1a2f1 � 0
que é absurdo, portanto os ideais não são isomorfos e logo as órbitas são disjuntas.
Análogamente para o caso pβq, supondo que φ � pφ1, φ2q é germe de difeomor�smo
como no item anterior, existem f1, f2, f3, g1, g2, g3 P Λ0pR2q tais que
x21 � f1φ
21 � f2φ
42 � f3φ1φ
22,
x32 � bx1x
22 � g1φ
21 � g2φ
42 � g3φ1φ
22,
comparando os 2-jatos obtemos
x21 � f1p0qpa1p0qx1 � a2p0qx2q
2,
0 � g1p0qpa1p0qx1 � a2p0qx2q2,
logo f1p0q, a1p0q � 0, g1p0q � a2p0q � 0. Agora comparando os 3-jatos obtemos
x32 � bx1x
22 � j1g1p0qpa1p0qx1q
2 � g3p0qpa1p0qx1qpb1p0qx1 � b2p0qx2q2.
Note que isto é uma contradição, pois na direita não temos o monômio x32 mas na
esquerda sim, portanto as órbitas são disjuntas.
5.3.3 Demonstração do Teorema 5.9(3)
Seja a P rΛ2pR2qstH�0u. Tome uma base rf1s, ..., rfµs de rΛ2pR2qstH�0u como na Tabela
5.2, logo a � c1rf1s � ... � cµrfµs e da prova do Teorema 5.9 (1) podemos veri�car o
seguinte
• A forma normal Fi que não possui modalidade, tem exatamente os i primeiros
coe�entes de c1, c2, ..., cµ iguais a zero. Portanto ao calcular o espaço tangente com
a fórmula obtemos que a codimensão de Fi é igual a i.
• No caso das formas normais que tem modalidade, consideramos a codimensão do
estrato, isto é, a codimensão da união das órbitas da família modal. Assím obtemos
que esta codimensão é i pois como no caso anterior se a � c1rf1s � ...� cµrfµs então
i coe�cientes de c1, c2, ..., cµ são zero.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 77
5.3.4 Demonstração do Teorema 5.9(4)
Qualquer forma normal com parâmetros no Teorema 5.9 tem a forma a0�b1a1�...�bsas
onde ai são restrições algébricas, bi são parâmetros, s ¤ 2. Para provar que os parâmetros
são modais é su�ciente mostrar que
ai R T pa0 � b1a1 � ...� bsasq, @i (5.4)
De fato, supondo que a forma normal so tem um parámetro (no outro caso é igual) e
supondo que os parâmetros não são modais obtemos que existem c0 P R e uma vizinhança
aberta I de c0 tal que a� ta1 � a� c0a1 para todo t P I. Isto signi�ca que existem germes
de difeomor�smos φt tais que φc0 � 0 e φ�t pa�ta1q � a�c0a1, logo derivando com respeito
a t temosdφ�t pa� ta1q
dt� 0 e portanto de (1.3) obtemos φ�pLXtpa� ta1q � a1q|t�c0 � 0
(Xt é o campo de vetores associado a φt) que implica LXc0pa � c0a1q � �a1. Agora de
forma análoga à prova da Proposição 4.14 temos que Xc0 P DerlogtH � 0u, então pela
Proposição 4.14 obtemos a1 P T pa � c0a1q. Portanto segue que se os parâmetros são
modais então a1 R T pa� c0a1q.
Agora analizemos cada caso:
1. Dk : x21x2 � xk�1
2 , rx1x2s � rx21 � pk � 1qxk�2
2 s � 0.
• Fi � rxi2 � bx1s, 1 ¤ i ¤ k � 4.
Obtemos as seguintes relações:
xα22 Fi � rxi�α2
2 s; xα11 Fi � brx1�α1
1 s; xα11 x
α22 Fi � 0, α1, α2 ¥ 1. (5.5)
Pela Proposição 4.22
T pFiq � R
#¸rPR
rrhFisprq, h P Λ0pR2q
+.
Usando as relações da equação (5.5) obtemos
T pFiq � Rtp2i� kqrxi2s � p2k � 2qbrx1s, brx21s, rx
i�12 s, rxi�2
2 s, ..., rxk�22 su,
e de rxk�22 s � 1
k�1rx2
1s, segue
T pFiq � Rtp2i� kqrxi2s � p2k � 2qbrx1s, rx21s, rx
i�12 s, rxi�2
2 s, ..., rxk�32 su.
Suponha rx1s P T pFiq, então
rx1s � app2i�kqrxi2s�p2k�2qbrx1sq�drx21s�c1rx
i�12 s�c2rx
i�22 s�...�ck�3�irx
k�32 s,
isto implica que a � d � c1 � ... � ck�3�i � 0 e p2k�2qab � 1, que é absurdo.
Portanto rx1s R T pFiq.

78 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
• Fk�3 � rp�qkx1 � bxk�32 s.
Obtemos as relações:
xα11 x
α22 Fk�3 � x1�α1
1 Fk�3 � x1�α22 Fk�3 � 0;
x1Fk�3
p�qkpk � 1q� rxk�2
2 s;
x2Fi � rbxk�22 s, α1, α2 ¥ 1.
De forma análoga ao caso anterior, obtemos
T pFiq � Rtp2k � 2qp�1qkrx1s � p3k � 6qbrxk�32 s, p�1qkrx2
1s, brxk�22 su,
então se rxk�32 s P T pFk�3q, devem existir c1, c2, c3 P R tais que
rxk�32 s � c1p2k � 2qp�1qkrx1s � c1p3k � 6qbrxk�3
2 s � c2p�1qkrx21s � c3brx
k�22 s,
que implica c1 � c2 � c3b � 0 e c1p3k � 6qb � 1, que é absurdo. Portanto
rxk�32 s R T pFk�3q.
2. E6 : x31 � x4
2, rx21s � rx3
2s � 0.
• F1 � r�x2 � bx1s.
Obtemos as relações:
x1F1 � r�x1x2s; x2F1 � r�x22 � bx1x2s; x1x2F1 � r�x1x
22s;
x22F1 � brx1x
22s; x
α1�11 F1 � xα2�2
2 F1 � xα11 x
α2�12 F1 � 0, α1, α2 ¥ 1.
Logo
T pF1q � Rt�10rx2s � 11brx1s, rx1x2s, rx22s, rx1x
22su,
então se rx1s P T pF1q, devem existir c1, c2, c3, c4 P R tais que
rx1s � �10c1rx2s � 11bc1rx1s � c2rx1x2s � c3rx22s � c4rx1x
22s,
que implica c1 � c2 � c3 � c4 � 0 e 11bc1 � 1, que é absurdo. Portanto
rx1s R T pF1q
• F2 � rx1 � bx22s.
Temos as relações:
x1F2 � brx1x22s; x2F2 � rx1x2s; x
22F2 � rx1x
22s;
xα2�22 F2 � xα1�1
1 F2 � xα11 x
α22 F2 � 0, α1, α2 ¥ 1.
Logo obtemos
T pF2q � Rt11rx1s � 13brx22s, rx1x2s, rx1x
22su,
portanto rx22s R T pF2q.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 79
• F3 � rx22 � bx1x2s.
Temos as relações:
x1F3 � rx1x22s; x2F3 � brx1x
22s;
xα2�12 F3 � xα1�1
1 F3 � xα11 x
α22 F3 � 0, α1, α2 ¥ 1.
Logo
T pF3q � Rt13rx22s � 14brx1x2s, rx1x
22su,
portanto rx1x2s R T pF3q.
3. E7 : x31 � x1x
32, 3rx2
1s � rx32s, rx1x
22s � 0.
• F1 � rx2 � bx1s.
Obtemos
x1F1 � rx1x2 � bx21s; x2F1 � rx2
2 � bx1x2s; x1x2F1 � r�x1x22s;
x21F1 � rx2
1x2s �1
3rx4
2s; x22F1 � rx3
2s;x1x2F1 � brx21x2s �
b
3rx4
2s; x32F1 � rx4
2s;
xα1�21 F1 � xα1�1
1 x2F1 � x1xα2�12 F1 � xα2�3
2 F1 � xα1�11 xα2�1
2 F1 � 0,
α1, α2 ¥ 1.
Logo
T pF1q � Rt7rx2s � 8brx1s, 10rx1x2s �11
3rx3
2s, 9rx22s � 10brx1x2s, rx
32s, rx
42su,
portanto rx1s R T pF1q.
• F2 � r�x1 � bx22s.
Temos as relações:
x1F2 � r�x21s; x2F2 � r�x1x2 � bx3
2s; x1x2F2 � r�x21x2s �
1
3r�x4
2s;
xα1�11 F2 � xα2�1
2 F2 � xα1�11 xα2�1
2 F2 � 0, α1, α2 ¥ 1.
Assim
T pF2q � Rt�8rx1s � 9brx22s, rx
21s, �10rx1x2s � 11rx3
2s, �rx42su,
portanto rx2s R T pF2q.
• F3 � rx22 � bx1x2s.
Temos as relações:
x1F3 � brx21x2s �
b
3rx4
2s; x2F3 � rx32s; x
22F3 � rx4
2s;
xα1�11 F3 � xα2�2
2 F3 � xα11 x
α22 F3 � 0, α1, α2 ¥ 1.

80 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
Assim
T pF3q � Rt9rx22s � 10brx1x2s, rx
32s, rx
42su,
portanto rx3s R T pF3q.
• F4 � r�x1x2 � bx32s.
Temos as relações:
x1F4 ��1
3rx4
2s; x2F4 � brx4s;xα1�11 F4 � xα2�1
2 F4 � xα11 x
α22 F4 � 0,
α1, α2 ¥ 1.
Logo
T pF4q � Rt�10rx1x2s � 11brx32s, rx
42su,
portanto rx4s R T pF4q.
4. E8 : x31 � x5
2, rx21s � rx4
2s � 0.
• F1 � rx2 � bx1s.
Obtemos as relações:
x1F1 � rx1x2s; x2F1 � rx22 � bx1x2s; x1x2F1 � rx1x
22s;
x22F1 � rx3
2 � bx1x22s; x
32F1 � brx1x
32s; x1x
22F1 � rx1x
32s;
xα1�21 F1 � x1x
32F1 � xα2�3
2 F1 � 0, α1, α2 ¥ 1.
Logo
T pF1q � Rt11rx2s � 13brx1s, rx1x2s, rx22s, rx
32s, rx1x
22s, rx1x
32su,
portanto rx1s R T pF1q.
• F2 � rx1 � b1x22 � b2x
32s
Temos as relações:
x1F2 � rb1x1x2 � b2x1x32s; x2F2 � rx1x2 � b1x
32s; x1x2F1 � brx1x
32s;
x22F2 � rx1x
22s; x
32F2 � rx1x
32s; x
α1�11 xα2�1
2 F2 � xα1�11 xα2�3
2 F2 � x1x22F2 � 0,
α1, α2 ¥ 1.
logo
T pF2q � Rt13rx1s � 14b1rx22s � 17b2rx
32s, 16rx1x2s � 17b1rx
32s, rx1x
22s, rx1x
32su,
portanto rx22s R T pF2q e rx3
2s R T pF2q.

Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares 81
• F3 � r�x22 � bx1x2s.
Obtemos as seguintes relações:
x1F3 � r�x1x22s; x2F3 � r�x3
2 � bx1x22s; x1x2F3 � r�x1x
32s;
x22F3 � brx1x
32s; x
α1�11 F3 � x1x
22F3 � x2
1x2F3 � xα2�12 F3 � 0,
α1, α2 ¥ 1.
Assim
T pF3q � Rt�14rx22s � 16brx1x2s, rx1x
22s, �14rx3
2s � 19rx1x22s, rx1x
32su,
portanto rx1x2s R T pF3q.
• F4 � r�x1x2 � bx32s.
Obtemos as relações:
x1F4 � brx1x32s; x2F4 � r�x1x
22s;x
22F4 � r�x1x
32s;
xα1�11 F4 � xα1
1 xα22 F4 � xα2�2
2 F4 � 0, α1, α2 ¥ 1
Assim
T pF4q � Rt�16rx1x2s � 17brx32s, rx1x
22s, rx1x
32su,
portanto rx32s R T pF4q.
• F5 � rx32 � bx1x
22s.
Temos as relações:
x1F5 � rx1x32s; x2F5 � brx1x
22s;
xα1�11 F5 � xα1
1 xα22 F5 � xα2�1
2 F5 � 0, α1, α2 ¥ 1.
Logo
T pF5q � Rt17rx32s � 19brx1x
22s, rx1x
32su,
portanto rx1x22s R T pF5q.
Agora já podemos resolver o Problema A, esta resolução será feita em dois teoremas.
No primeiro consideramos n ¥ 2 e no segundo fazemos a classi�cação para n � 1.
Teorema 5.16: Seja H � Hpx1, x2q como na Tabela (5.1) e considere n ¥ 2. Qualquer
curva no espaço simplético pR2n, ω0q, que é difeomorfa à curva N � tHpx1, x2q � x¥3 � 0u
pode ser reduzida por um simplectomor�smo a uma e só uma das formas normais N i,
i � 1, 2, � � � , µ dadas em 5.2, onde µ é a multiplicadade de H. Os parâmetros b, b1, b2
são modais simpléticos. A codimensão da classe da singularidade simplética de�nida pela
forma normal N i na classe de todas as curvas difeomorfas a N é igual a i.

82 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
Demonstração: Fixe H na tabela (5.1). Seja N uma curva difeomorfa à curva N , então
existe um germe de difeomor�smo f : pR2n, 0q ÝÑ pR2n, 0q tal que fpN, 0q � pN , 0q. Note
que N � R2 � t0u. Seja M � fpR2 � t0uq, então pM, 0q é germe de subvariedade de
mesma dimensão que R2 � t0u e N �M . Logo
f�rω0|TM sN � rpf�ω0q|R2�t0usN .
Agora pelo Teorema 5.9(2) existe i P t1, 2, . . . , µu tal que rpf�ω0q|R2�t0usN é difeomorfa
a rFidx1 ^ dx2sN � rωi|R2�t0usN , portanto rω0|TM sN é difeomorfa a rωi|R2�t0usN e pelo
Teorema 2.12 temos rω0sN é difeomorfa a rωisN .
Segue da parte inicial da demonstração do Teorema 5.9(2) que rωisN é difeomorfa a
rω0sN i , assim pelo Teorema A (2), N é simplectoforma a N i.
Teorema 5.17: Seja H � Hpx1, x2q como na tabela (5.1). Todas as curvas no espaço
simplético pR2, ω0 � dp^dqq que são difeomorfas à curva tH � 0u são simplectomorfas a
não ser que H � E8. Qualquer curva em pR2, dp^dqq que é difeomorfa a E8 : tx31�x
52 � 0u
é simplectomorfa a um das curvas p3 � q5.
Demonstração: Fixe H na tabela (5.1). Seja N uma curva difeomorfa à curva N , então
existe um germe de difeomor�smo f : pR2, 0q ÝÑ pR2, 0q tal que fpN, 0q � pN , 0q. Logo
temos que rω0sN e rf�ω0sN são difeomorfas, note que f�ω0 é uma forma simplética, pois
f é germe de difeomor�smo. Portanto rf�ω0sN P rSymppR2qsN , logo pelo Teorema 5.2(2)
rf�ω0sN � r°µi�1 cifidx1 ^ dx2sN , para alguns ci P R, i � 1, . . . , µ, c1 � 0 e onde f1 �
F1, . . . , fµ é base de Λ0pR2qx∇Hy . Pela demonstração do Teorema 5.9(2) r
°µi�1 cifidx1 ^ dx2sN
é difeomorfa a rF1dx1 ^ dx2sN , assim temos que rω0sN é difeomorfa a rF1dx1 ^ dx2sN .
1) Considere o caso H � E8. Então F1 � 1, logo o germe de difeomor�smo gpx1, x2q �
pp, qq leva rF1dx1 ^ dx2sN em rω0stHpp,qq�0u, portanto pelo Teorema A (2) N é simplecto-
forma a tHpp, qq � 0u.
2) No casoH � E8 temos que F1 � �1. Assim temos rω0sN é difeomorfa a rdx1^dx2sN
ou a r�dx1 ^ dx2sN . No primeiro caso N é simplectomorfa a tp3 � q5 � 0u como no
item anterior, no segundo caso, os germes de difeomor�smos px1, x2q ÝÑ px1,�x2q e
px1, x2q ÝÑ pp, qq levam r�dx1^dx2sN em rdp^dqstp3�q5�0u e portanto N é simplectomorfo
a tp3 � q5 � 0u.
Note que as curvas tp3 � q5 � 0u e tp3 � q5 � 0u não são simplectomorfas, pois as
restrições rdx1 ^ dx2sN e r�dx1 ^ dx2sN não são difeomorfas.

Referências Bibliográ�cas
[A] V. I. Arnold; First step of local symplectic algebra, Di�erential topology, in�nite-
dimensional Lie algebras, and applications; D. B. Fuch's 60th anniversary collection,
Americam Mathematical Society; Transl. ser. 2, Am. Math. Soc. 194(44) (1999), 1-8.
[A-G] V. I. Arnold, A. B. Givental; Symplectic geometry, in: Dynamical systems, IV.
Encyclop. Math. Sci. 4, Springer Berlin (2001) 1-138.
[A-V-G] V. I. Arnold, S. M. Gusein - Zade, A. N. Varchenko; Singularities of Di�erentiable
Maps, vol 1. Birkhä, Boston (1985).
[D-J-Z] W. Domitrz, S. Janeczko, M. Zhitomirskii; Symplectic singularities of varieties:
The method of algebraic restrictions; Journal fur die reine und angewandte Mathe-
matik; J. reine angew. Math. 618(2008), 197-235.
[G] C. G. Gibson ; Singular points of smooth mappings. Pitman London-San Francisco-
Melbourne (1979).
[I-J] G. Ishikawa, S. Janeczko; Symplectic bifurcations of plane curves and isotropic lif-
tings; Q. J. Math. 54, No. 1 (2003), 73-102.
[K-M] B. Keith, G. Marian ; Di�erential Geometry and Topology with a View to Dyna-
mical Systems. Chapman & Hall(2005).
[L] J. M. Lee; Introduction to smooth manifolds. Graduate Texts in Mathematics, No.218.
Springer New York. (2013).
[Ly] O. V. Lyashko; Classi�cation of critical points of functions on a manimold with a
singular boundary. Funct. Anal. Appl. 17:3 (1983), 187-193.
[M] R. Moussu; Sur l'existence d'intégrales premiéres pour un germe de forme de Pfa�.
Ann. Inst. Fourier 26:2 (1976), 171-220.
83
84 Capítulo 5. Classi�cação simplética de curvas planas quase-homogêneas singulares
[R] H. -J. Rei�en; Das Lemma von Poincaré für holomorphe Di�erentialformen auf kom-
plexen Räumen, Math. Z., No. 101 (1967), 269-284.
[S] A. C. da Silva; Lectures on Symplectic Geometry. Lecture Notes in Mathematics,
Volume 1764. Springer-Verlag Berlin Heidelberg, (2008).
[T] L. W. Tu; An introduction to manifolds. Springer New York. (2011).
[Z] M. Zhitomirskii; Relative Darboux theorem for singular manifolds and local contact
algebra, Can. J. Math. 57, No. 6 (2005), 1314-1340.







